CN111014131A - 一种自动清洗机器人 - Google Patents
一种自动清洗机器人 Download PDFInfo
- Publication number
- CN111014131A CN111014131A CN201911101743.7A CN201911101743A CN111014131A CN 111014131 A CN111014131 A CN 111014131A CN 201911101743 A CN201911101743 A CN 201911101743A CN 111014131 A CN111014131 A CN 111014131A
- Authority
- CN
- China
- Prior art keywords
- pipe
- outlet
- assembly
- pressure water
- frame
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000004140 cleaning Methods 0.000 title claims abstract description 58
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 claims abstract description 180
- 239000007921 spray Substances 0.000 claims abstract description 52
- 239000003814 drug Substances 0.000 claims abstract description 34
- 238000004804 winding Methods 0.000 claims abstract description 25
- 239000006260 foam Substances 0.000 claims abstract description 23
- 229910000831 Steel Inorganic materials 0.000 claims abstract description 14
- 239000010959 steel Substances 0.000 claims abstract description 14
- 239000007788 liquid Substances 0.000 claims description 66
- 230000009977 dual effect Effects 0.000 claims description 16
- 238000005507 spraying Methods 0.000 claims description 8
- 238000005406 washing Methods 0.000 claims description 5
- 238000004891 communication Methods 0.000 claims description 3
- 230000000903 blocking effect Effects 0.000 claims description 2
- 230000000149 penetrating effect Effects 0.000 claims description 2
- 229940079593 drug Drugs 0.000 abstract description 3
- 230000005540 biological transmission Effects 0.000 description 25
- 238000010586 diagram Methods 0.000 description 9
- WHXSMMKQMYFTQS-UHFFFAOYSA-N Lithium Chemical compound [Li] WHXSMMKQMYFTQS-UHFFFAOYSA-N 0.000 description 7
- 229910052744 lithium Inorganic materials 0.000 description 7
- 239000003638 chemical reducing agent Substances 0.000 description 6
- 239000000126 substance Substances 0.000 description 6
- 244000144972 livestock Species 0.000 description 4
- 230000001360 synchronised effect Effects 0.000 description 4
- 230000009471 action Effects 0.000 description 3
- 230000000712 assembly Effects 0.000 description 3
- 238000000429 assembly Methods 0.000 description 3
- 238000009395 breeding Methods 0.000 description 3
- 230000001488 breeding effect Effects 0.000 description 3
- 230000036541 health Effects 0.000 description 3
- 241000201246 Cycloloma atriplicifolium Species 0.000 description 2
- 230000008878 coupling Effects 0.000 description 2
- 238000010168 coupling process Methods 0.000 description 2
- 238000005859 coupling reaction Methods 0.000 description 2
- 239000000645 desinfectant Substances 0.000 description 2
- 230000000249 desinfective effect Effects 0.000 description 2
- 230000005484 gravity Effects 0.000 description 2
- 230000003993 interaction Effects 0.000 description 2
- 230000005389 magnetism Effects 0.000 description 2
- 238000000034 method Methods 0.000 description 2
- 239000000203 mixture Substances 0.000 description 2
- 238000004659 sterilization and disinfection Methods 0.000 description 2
- 241000196324 Embryophyta Species 0.000 description 1
- 206010063385 Intellectualisation Diseases 0.000 description 1
- 230000009286 beneficial effect Effects 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 230000003670 easy-to-clean Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000011086 high cleaning Methods 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 230000000452 restraining effect Effects 0.000 description 1
- 238000006467 substitution reaction Methods 0.000 description 1
Images















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B08—CLEANING
- B08B—CLEANING IN GENERAL; PREVENTION OF FOULING IN GENERAL
- B08B3/00—Cleaning by methods involving the use or presence of liquid or steam
- B08B3/02—Cleaning by the force of jets or sprays
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01K—ANIMAL HUSBANDRY; AVICULTURE; APICULTURE; PISCICULTURE; FISHING; REARING OR BREEDING ANIMALS, NOT OTHERWISE PROVIDED FOR; NEW BREEDS OF ANIMALS
- A01K1/00—Housing animals; Equipment therefor
- A01K1/01—Removal of dung or urine, e.g. from stables
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01K—ANIMAL HUSBANDRY; AVICULTURE; APICULTURE; PISCICULTURE; FISHING; REARING OR BREEDING ANIMALS, NOT OTHERWISE PROVIDED FOR; NEW BREEDS OF ANIMALS
- A01K31/00—Housing birds
- A01K31/04—Dropping-boards; Devices for removing excrement
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61L—METHODS OR APPARATUS FOR STERILISING MATERIALS OR OBJECTS IN GENERAL; DISINFECTION, STERILISATION OR DEODORISATION OF AIR; CHEMICAL ASPECTS OF BANDAGES, DRESSINGS, ABSORBENT PADS OR SURGICAL ARTICLES; MATERIALS FOR BANDAGES, DRESSINGS, ABSORBENT PADS OR SURGICAL ARTICLES
- A61L2/00—Methods or apparatus for disinfecting or sterilising materials or objects other than foodstuffs or contact lenses; Accessories therefor
- A61L2/16—Methods or apparatus for disinfecting or sterilising materials or objects other than foodstuffs or contact lenses; Accessories therefor using chemical substances
- A61L2/18—Liquid substances or solutions comprising solids or dissolved gases
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61L—METHODS OR APPARATUS FOR STERILISING MATERIALS OR OBJECTS IN GENERAL; DISINFECTION, STERILISATION OR DEODORISATION OF AIR; CHEMICAL ASPECTS OF BANDAGES, DRESSINGS, ABSORBENT PADS OR SURGICAL ARTICLES; MATERIALS FOR BANDAGES, DRESSINGS, ABSORBENT PADS OR SURGICAL ARTICLES
- A61L2202/00—Aspects relating to methods or apparatus for disinfecting or sterilising materials or objects
- A61L2202/10—Apparatus features
- A61L2202/17—Combination with washing or cleaning means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B08—CLEANING
- B08B—CLEANING IN GENERAL; PREVENTION OF FOULING IN GENERAL
- B08B2203/00—Details of cleaning machines or methods involving the use or presence of liquid or steam
- B08B2203/02—Details of machines or methods for cleaning by the force of jets or sprays
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B08—CLEANING
- B08B—CLEANING IN GENERAL; PREVENTION OF FOULING IN GENERAL
- B08B2203/00—Details of cleaning machines or methods involving the use or presence of liquid or steam
- B08B2203/02—Details of machines or methods for cleaning by the force of jets or sprays
- B08B2203/0217—Use of a detergent in high pressure cleaners; arrangements for supplying the same
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B08—CLEANING
- B08B—CLEANING IN GENERAL; PREVENTION OF FOULING IN GENERAL
- B08B2203/00—Details of cleaning machines or methods involving the use or presence of liquid or steam
- B08B2203/02—Details of machines or methods for cleaning by the force of jets or sprays
- B08B2203/0258—Multiple lance high pressure cleaning station
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B08—CLEANING
- B08B—CLEANING IN GENERAL; PREVENTION OF FOULING IN GENERAL
- B08B2203/00—Details of cleaning machines or methods involving the use or presence of liquid or steam
- B08B2203/02—Details of machines or methods for cleaning by the force of jets or sprays
- B08B2203/0276—Hose reels specific for high pressure cleaners
Landscapes
- Life Sciences & Earth Sciences (AREA)
- Environmental Sciences (AREA)
- Zoology (AREA)
- Animal Husbandry (AREA)
- Biodiversity & Conservation Biology (AREA)
- Health & Medical Sciences (AREA)
- General Chemical & Material Sciences (AREA)
- Chemical Kinetics & Catalysis (AREA)
- Chemical & Material Sciences (AREA)
- Birds (AREA)
- Epidemiology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Cleaning By Liquid Or Steam (AREA)
Abstract
本发明公开了一种自动清洗机器人包括:由第一驱动组件驱动的走行部;卷管轮盘,其设置在第一框架上且包括两侧盘体、通水转轴及若干个缠绕辊,通水转轴由第二驱动组件驱动转动;丝杠组件,其包括丝杠和导向装置,丝杠与卷管轮盘联动转动;至少一个药液箱;虹吸阀,其具有至少一个入液口和出液口;喷水组件,其包括摆动驱动组件和可切换双喷头,可切换双喷头由摆动驱动组件驱动并可摆动,可切换双喷头包括钢球、入口、第一出口、第二出口、高压水喷头和泡沫喷头,钢球阻塞入口和第一出口之间的流路或入口和第二出口之间的流路;支撑臂,其设置在第二框架上且其上连接有至少一个喷水组件。本发明用于智能、高效地实现自动清洗作业。
Description
技术领域
本发明属于自动清洗技术领域,具体涉及一种自动清洗机器人。
背景技术
随着人们生活水平的提高,畜牧养殖业越来越繁荣,同时随着科技进步,大规模集约化养殖场也越来越多,而由此带来的生物安全风险也越来越高,因此,畜牧养殖业行业的清洗消毒需求也日趋增大。
传统的清洗作业,需要人工手持高压水管对清洗区域浸湿并冲洗,此后再人工喷洒泡沫清洗剂与其表面区域脏物反应并软化,并再次利用高压水管对其反复冲洗,冲洗完成后再通过手持消毒器对牲畜养殖空间进行反复喷洒消毒,此清洗过程劳动强度大,清洗效率低,也存在清理死角的问题,且养殖场环境复杂多样,有时针对不同场景需要不同规格的产品及清洗方式,无疑这些都会给清洗人员带来操作上的困难,进而大大降低清洗效率,此外,恶劣的清洗消毒工作环境对操作人员的安全及健康产生隐患。
因此对于大规模化养殖场,亟需一种可以代替人工作业的自动清洗作业方式,以智能、高效地实现自动清洗作业,满足不同场景及不同的清洗方式。
发明内容
本发明的目的在于提供一种自动清洗机器人,用于解决传统人工清洗所带来的劳动强度大、清洗效率低且适用性差的问题,智能、高效实现自动清洗作业。
为了解决上述技术问题,本发明提出如下技术方案予以解决:
一种自动清洗机器人,其特征在于,包括:第一驱动组件;走行部,其由所述第一驱动组件驱动;第二驱动组件;第一框架,其由所述走行部承载;卷管轮盘,其设置在所述第一框架上,且包括两侧盘体、连接两盘体的通水转轴及用于缠绕高压水管的若干个缠绕辊,所述通水转轴由所述第二驱动组件驱动转动并与所述高压水管的出水口连通;丝杠组件,其包括丝杠和与所述丝杠螺纹连接的导向装置,所述丝杠与所述卷管轮盘联动转动,且所述导向装置用于所述高压水管收放时导向;至少一个药液箱,各药液箱中药液种类不同;虹吸阀,其具有至少一个入液口和出液口,各入液口分别与所述通水转轴及各药液箱连通;喷水组件,其包括摆动驱动组件和可切换双喷头,所述可切换双喷头由所述摆动驱动组件驱动并可摆动,所述可切换双喷头包括切换器、高压水喷头和泡沫喷头,所述切换器包括钢球、入口、第一出口和第二出口,所述入口与所述虹吸阀的出液口连通,所述高压水喷头插设在所述第一出口处,所述泡沫喷头插设在所述第二出口处,所述钢球选择性地阻塞所述入口和第一出口之间的流路或所述入口和第二出口之间的流路;第二框架,其由所述走行部承载;支撑臂,其设置在所述第二框架上,且所述支撑臂上连接有至少一个所述喷水组件;电控箱,用于控制所述自动清洗机器人动作;电源,其为所述自动清洗机器人中各用电器件供电。
如上所述的自动清洗机器人还包括第三驱动组件和转动连接件,所述转动连接件套设在所述支撑臂上,且所述第三驱动组件驱动所述转动连接件连同所述支撑臂一起转动。
如上所述的自动清洗机器人,所述支撑臂包括左支撑臂部分和右支撑臂部分;所述转动连接件包括左转动连接件和右转动连接件;所述左转动连接件套设在所述左支撑臂部分上,且所述左支撑臂部分的一端连接有所述喷水组件;所述右转动连接件套设在所述右支撑臂部分上,且所述右支撑臂部分的一端连接有所述喷水组件;所述第三驱动组件驱动所述左转动连接件和右转动连接件连同所述左支撑臂部分和右支撑臂部分转动。
如上所述的自动清洗机器人还包括:管轴,其一端插设在所述左转动连接件内,另一端插设在所述右转动连接件内,且所述左支撑臂部分的另一端和所述右支撑臂部分的另一端均位于所述管轴内,所述管轴与所述左转动连接件和右转动连接件连同转动;所述左支撑臂部分的另一端的一侧面上形成有第一齿条,所述右支撑臂部分的另一端的一侧面上形成有与所述第一齿条相对的第二齿条;齿轮组件,其固定在所述管轴上且所述齿轮组件中的齿轮与所述第一齿条和第二齿条均啮合;伸缩电机,其输出轴与所述齿轮组件的齿轮连接。
如上所述的自动清洗机器人,所述摆动驱动组件包括:摆动电机;蜗杆,其与所述摆动电机的输出轴连接;蜗轮,其与所述蜗杆配合;摆动管轴,其穿设在所述蜗轮的中心,其一端与所述切换器的入口连通,另一端与所述虹吸阀的出液口连通。
如上所述的自动清洗机器人,所述摆动电机通过软轴与所述蜗杆连接。
如上所述的自动清洗机器人还包括升降驱动组件,其驱动所述第二框架升降。
如上所述的自动清洗机器人,所述导向装置包括:导向框;螺纹块,其设置在所述导向框底部且具有螺纹通孔,所述丝杠与所述螺纹孔螺纹连接;辅助卷管驱动组件;第一驱动辊,其由所述辅助卷管驱动组件驱动转动,且所述第一驱动辊与所述丝杠平行并穿过所述导向框;第一导向轮,其位于所述导向框内并套设在所述第一驱动辊上,且所述第一导向轮随所述第一驱动辊转动而转动;第二导向轮,其转动设置在所述导向框内且并与所述第一导向轮平行,所述高压水管从所述第一导向轮和第二导向轮之间的间隙穿过。
如上所述的自动清洗机器人所述自动清洗机器人还包括设置在所述第一框架上且与所述第一驱动辊平行的导向辊,所述导向框的顶部开设有圆弧形槽,所述导向辊的部分外侧表面嵌入所述圆弧形槽内。
如上所述的自动清洗机器人还包括与所述电控箱内无线接收模块通讯的遥控装置,所述遥控装置远程发射使所述自动清洗机器人动作的遥控信号。
与现有技术相比,本发明的优点和有益效果是:通过电控箱自动控制清洗机器人动作,并控制第一驱动组件驱动走行部行走,实现机器人的自动控制行走;在需要收放高压水管时,电控箱向第二驱动组件发送信号,第二驱动组件驱动通水转轴和丝杠联动转动,进而带动整个卷管轮盘转动,由于高压水管的出水口与通水转轴连通,即通水转轴与高压水管的一端连接,因此,在通水转轴带动卷管轮盘转动的同时,高压水管处于收放状态,随着导向装置在丝杠上移动,将高压水管缠绕在缠绕辊上或从缠绕辊上放出,实现自动收放高压水管;通过对虹吸阀的控制可以从虹吸阀的出液口输出高压水或高压水和各药液的混合液,以便于在通过切换器切换不同喷头时对应喷出高压水或混合液,实现高压水或混合液的自动切换;支撑臂上设置在第二框架上且设置有喷水组件,喷水组件中的可切换双喷头可由摆动驱动驱动摆动,可切换双喷头可在垂直于支撑臂的平面上的摆动,使喷头适用于各种不同场景,扩大机器人的使用范围;该机器人自动化程度高,降低人工任务量,清洗效率高,且避免恶劣的清洗环境对身体健康的危害,用户体验性高。
结合附图阅读本发明的具体实施方式后,本发明的其他特点和优点将变得更加清楚。
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1为本发明提出的自动清洗机器人一实施例的整体结构图;
图2为图1示出的自动清洗机器人实施例中行走部分的结构图;
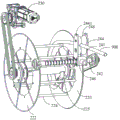
图3为图1中示出的自动清洗机器人实施例中收放管部分和虹吸阀的第一视角的结构图,其中去除了形成外观的外壳体;
图4为图1中示出的自动清洗机器人实施例中收放管部分和虹吸阀的第二视角的结构图,其中去除了形成外观的外壳体;
图5为图3中去除第一框架后的部分结构的结构图一;
图6为图3中去除第一框架后的部分结构的结构图二;
图7为图3中去除第一框架后的部分结构的结构图三;
图8为图3中去除第一框架后的部分结构的结构图四;
图9为图5中示出的导向装置的结构图;
图10为图1示出的自动清洗机器人实施例中调节部分的结构图;
图11为图10中示出的调节部分的局部图;
图12为沿图10中A-A方向的剖视图;
图13为图12中B部分的放大图;
图14为图11示出的调节部分中摆动驱动组件的部分结构图;
图15为图11示出的调节部分中可切换双喷头的结构图;
图16为图15示出的可切换双喷头的剖面图。
附图标记:
100-行走部分,110-底盘框架,120-车轮,130-传动链条,140-电机,150-减速机,160-锂电池,170-左测距传感器,180-右测距传感器,200-收放管部分,210-第一框架,220-卷管轮盘,221-通水转轴,222-第一盘体,223-第二盘体,224-缠绕辊,225-入水口,226-出水口,230-卷管电机,240-丝杠组件,241-辅助卷管电机,242-丝杠,243-第一驱动辊,244-导向框,2441-圆弧形槽,245-导向辊,246-螺纹块,247-第一导向轮,248-第二导向轮,250-限位防护辊组,260-卷管保护辊组,300-调节部分,310-第二框架,320-升降驱动组件,321-升降电机,322-蜗轮丝杠升降机,323-丝杠,324-丝杠螺母,330-俯仰调节组件,331-俯仰电机,332-矩形管轴,333-齿轮组件,3331-齿轮,334-左支撑臂部分,3341-第一齿条,335-右支撑臂部分,3351-第二齿条,336-左转动连接件,337-右转动连接件,338-蜗轮蜗杆盒,3381-蜗轮,3382-蜗杆,3383-摆动电机,339-可切换双喷头,3391-切换器,33911-入口、33912-第一出口,33913-第二出口,33914-钢球,3392-高压水喷头,3393-泡沫喷头,400-虹吸阀,410-第一入口,420-第二虹吸入口,430-第三虹吸入口,440-出液口,500-电控箱,600-遥控装置,700-手动高压球阀,700-高压电磁阀,B1-第一种药液箱,B2-第二种药液箱,a-出水管路,b-第一段入水管路,c-第二段入水管路,d-第三段入水管路,e-药液通入管路。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下将结合附图和实施例,对本发明作进一步详细说明。
需要说明的是,在本发明的描述中,术语“上”、“下”、“左”、“右”、“前”、“后”、“内”、“外”等指示的方向或位置关系的术语是基于附图所示的方向或位置关系,这仅仅是为了便于描述,而不是指示或暗示所述装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。为了实现对畜牧养殖场自动化清洗,降低人工任务量、提高清洗效率及适用于多种不同场合,如图1所示,本实施例涉及一种自动清洗人,包括行走部分100、收放管部分200、调节部分300、虹吸阀400、电控箱500和用于在远程控制时与电控箱500无线通讯的遥控装置600。如下将结合附图对自动清洗机器人的各部分进行详细描述。在本实施例中,电控箱500用于自动清洗机器人的电源信号、通讯信号、控制信号等,实现机器人的自动行走及各种动作。
实施例一
为了使机器人自动行走,如图2所示,机器人的底部设置有行走部分100,包括第一驱动组件和由第一驱动组件驱动行走的走行部,在本实施例中,走行部包括底部框架110和安装于底部框架110上的左右两侧的两组车轮,第一驱动组件包括电机、减速机及动力传动部件。在本实施例中,动力传动部件选择为链轮链条传动,为了实现每组车轮的独立调节,每组车轮由一组电机和减速机通过链轮链条驱动实现行走(例如前进、后退和转向)。具体的,每组车轮中一个为主动轮,其安装在主动轮轴上,另一个为从动轮,其安装在从动轮轴上,主动轮轴和从动轮轴上连接有链轮,链轮之间通过传动链条连接,电机输出扭矩驱动主动轮轴转动,主动轮轴通过链轮链条驱动从动轮轴转动,从而实现一组车轮的转动。左右两组车轮分别有对应的电机、减速机及链轮链条,两组相互独立以进行独立速度调节,从而可以实现前进、后退以及转向动作。
当然,动力传动部件也不局限于如上所述的链轮链条,也可以为其他传动方式,例如皮带传动等,电机与主动轮轴之间的传动也可以是齿轮-齿轮、同步带、链条、联轴器、蜗杆-蜗轮或其组合等形式,其中齿轮可以为直齿轮、斜齿轮或锥齿轮等均可,只要能够实现动力传输即可,在此不做限制。
参考图2,其示出了左侧一组车轮的电机140和减速机150,以及右侧一组车轮的一个车轮130(可以为主动轮或从动轮)以及连接主动轮轴和从动轮轴的传动链条130,且每组车轮的电机和减速机均置于底部框架110内,其中在底部框架100还容纳有锂电池160,该锂电池160包括24V和36V两块锂电池,电压容量大,可用于机器人的持久工作,且双锂电池可以采用三种工作模式,平时采用24V+36V双锂电池工作,也可以在其中一块锂电池没电时采用另一块电池进行应急供电,避免电源拖线造成触、绕线等风险。
此外,为了实现机器人的避障功能,在底部框架110的前部的左右两侧分别设置有左测距传感器170和右测距传感器180,同理地,在底部框架110的后部的左右两侧也设置有两个测距传感器(未示出),目的在于,在机器人行走过程中,实时检测前方障碍物的距离,实现对机器人行走方向的调整,提高了机器人的智能化。
在不需要机器人进行清洗工作时,高压水管900是缠绕在机器人的缠绕辊224上,而在需要机器人件清洗工作时,需要将高压水管900有序地从缠绕辊224上有序地放出,以通入高压水,而在机器人完成清理工作时,又需要将高压水管900有序地缠绕至缠绕辊224上。
为了实现有序地收放高压水管900,参考图3至图9,行走部分100上方承载有收放管部分200,收放管部分200具有第一框架210和转动设置在第一框架210上的卷管轮盘220以及丝杠组件240。本实施例高压水管900为橡胶软管,其中第一框架210由走行部承载,因此,在走行部移动时第一框架210也会随着移动。
如图3至图7所示,卷管轮盘220为“工”字形结构,包括两侧的盘体222和223、连接两侧盘体222和223的通水转轴221和与通水转轴221平行的若干个缠绕辊224,缠绕辊224连接在两侧盘体222和223之间,且如图5和图6所示,六个缠绕辊224围绕通水转轴221形成一圈,用于缠绕高压水管900(如图6所示)。
如图5和图7所示,通水转轴221上开设有入水口225(在图7中示出)和出水口226(在图5中示出),该入水口225通过连接头与高压水管900的出水端连通,该出水口226设置在通水转轴的第二端部且用于将来自高压水管900的高压水输出。因此,在通水转轴221例如在图7中逆时针转动时,会将高压水管900缠绕至缠绕辊224上,而顺时针转动时,会放出高压水管900。
为了实现在通水转轴221可转动,设置有第二驱动组件,在本实施例中,如图6所示,第二驱动组件包括卷管电机230和链轮链条传动部件,通水转轴221的第一端部上装有链轮,卷管电机230通过链条将转矩传递至通水转轴221,带动通水转轴211连同卷管轮盘220一起转动。
此外,为了在卷管轮盘220转动时高压水管900能够分散地缠绕至缠绕辊224上,如图5所示,在通水转轴211的第二端部上也装有链轮,且在平行于通水转轴211的丝杠242的与通水转轴211的第二端部同侧的端部上也装有链轮,通过链条连接通水转轴211的第二端部的链轮和丝杠242端部的链轮,实现在通水转轴221转动时丝杠同时联动转动,此时与丝杠242螺纹连接的导向装置(未标注)沿丝杠242移动,且由于导向装置用于导向高压水管900,因此,在通水转轴221转动缠绕高压水管900的同时导向装置沿丝杠242移动,使高压水管900有序缠绕至缠绕辊224上,优选地,丝杠242的导程等于高压水管900的管直径,这样,在导向装置沿丝杠242移动时,实现高压水管900均匀地缠绕至缠绕辊224上。
如图5至图9所示,在一种实施例中,导向装置包括导向框244、螺纹块246、第一导向轮247和第二导向轮248,其中第一导向轮247和第二导向轮248均为弹性胶轮。具体地,导向框244包括两个相对的侧板(未标注)。螺纹块246设置在导向框244的底部,具体地螺纹块246夹设在两个相对侧板之间的底部且具有螺纹通孔(未示出),丝杠242穿过螺纹通孔且与螺纹通孔螺纹连接。第一导向轮247和第二导向轮248设置在导向框244上,具体地分别可以转动设置在导向框244的相对侧板之间,第一导向轮247和第二导向轮248的转动轴线平行,且第一导向轮247和第二导向轮248之间具有平行间隙,高压水管900从该平行间隙中穿过(如图7所示),用于对高压水管900导向,优选地,第二导向轮248位于第一导向轮247的正上方。
一般地,需要清洗的养殖场区域的表面都有些不容易清洗的脏物,需要使用药液(例清洗液、消毒液等)溶解软化粘附在表面上的脏物,然后用高压水柱打击脏物,将其冲离开,再喷射消毒液进行消毒处理,以达到较高的生物安全等级,因此,在本实施例中,可以设置有多个不同药液种类的药液箱,如图3、图5和图6所示,本实施例在第一框架210内容纳有两个药液箱,包括药液箱B1和药液箱B2。当然,药液箱的数量也不局限于如上所述的两个,在此不做限制。
为了将各药液箱中药液以及高压水引出,如图3至图6所示,设置有虹吸阀400,虹吸阀400包括至少一个入液口和出液口,在本实施例中,虹吸阀400的入液口至少包括有用于接收高压水的第一入口410、用于接收(例如来自药液箱B2的)第一种药液的第二虹吸入口420和用于接收(例如来自药液箱B1的)第二种药液的第三虹吸入口430以及用于输出高压水或高压水与药液的混合液的出液口440。在本实施例中,第一入口410通过管路与通水转轴221的出水口226连通,第二虹吸入口420通过管路与药液箱B2连通,第三虹吸入口430通过管路与药液箱B1连通。
具体地,如图5和图6所示,通水转轴221的出水口226通过旋转接头(未标注)接入第一段入水管路b,第一段入水管路b通过手动高压球阀700与第二段入水管路c连通,第二段入水管路c通过高压电磁阀800与第三段入水管路d连通,第三段入水管路d与第一入口410连通,通过使用高压电磁阀800和高压手动球阀700进行自动或手动切断高压水,且也起到保护作用。此外,仅以药液箱B2的管路为例进行说明,药液箱B2中的药液通过药液通入管路e与第二虹吸入口420连通,可以在药液通入管路e中也连接有高压电磁阀(未示出),以实现对药液的选择。出液口440通过出水管路输出高压水或高压水与药液的混合液。
如上所述的高压水管900、虹吸阀400、各管路a-e、药液箱B1和B2、高压电磁阀800和高压手动球阀700等形成了机器人的液路管道系统。
为了选择性地喷出高压水和混合液,其设置了调节部分300,该调节部分300包括第二框架310,支撑臂设置在第二框架310上,支撑臂上连接有至少一个喷水组件,优选在支撑臂两端中的每端连接有一个喷水组件,其中第二框架310由走行部承载,在走行部移动时第二框架310也会随着移动。在本实施例中,喷水组件包括摆动驱动组件和可切换双喷头,摆动驱动组件驱动可切换双喷头在垂直于支撑臂的平面上可360°摆动。
具体地,如图10、图14至图16所示,摆动驱动组件包括摆动电机3383和蜗轮蜗杆盒338,蜗轮蜗杆盒338包括蜗杆3381、与蜗杆3381配合的蜗轮3382和传射在蜗轮3382的中心的摆动管轴(未示出),其中摆动管轴的一端与可切换双喷头339连接,另一端通过(如图11示出的)旋转接头J与出水管路a连通,摆动电机3383的输出轴与蜗杆3381连接,蜗杆3381转动带动蜗轮3382在垂直于支撑臂的平面上转动,因此,在摆动电机3383工作时,其转矩传递至蜗轮蜗杆盒338,由此可切换喷头339在垂直于支撑臂的平面上可摆动,调节可切换双喷头339的喷射角度。优选地,摆动电机3383的输出轴通过软轴远程与蜗杆3381连接,这种柔性传动系统,可避免摆动电机3383远离易接触水的区域,降低进水风险,提高摆动电机3383使用安全性及可靠性。
为了实现高压水喷头3392和泡沫喷头3393的可切换,如图15和图16所示,可切换双喷头339包括切换器3391、高压水喷头3392和泡沫喷头3393,且切换器3391包括外壳体(未标注)、入口33911、第一出口33912、第二出口33913和钢球33914,入口33911与摆动管轴的一端连通,高压水喷头3392插设在第一出口33911处,泡沫喷头3393插设在第二出口33912处,钢球33914选择性地阻塞入口33911和第一出口33912之间的流路或入口33911和第二出口33913之间的流路,以便实现从高压水喷头3392喷出高压水(水柱)或从泡沫喷头3393喷出高压水及药液的混合液产生的泡沫。
具体地,如图10和图16所示,在需要喷出高压水时,首先将流通高压水的高压水管路断开,控制摆动电机3383工作,将可切换双喷头339从图10所在的位置调整至高压水喷头3392在上而泡沫喷头3393在下的水平位置,即将可切换双喷头339逆时针摆动90°,此时钢球33914在重力作用下落入第二出口33912处,将泡沫喷头3393堵住,开启高压水管路,水压压紧钢球33914使其保持不动而持续堵塞泡沫喷头3393,此时高压水就从高压水喷头3392中喷出,在此后的高压水管路开启期间,由于水压作用,此时无论如何摆动可切换双喷头339,仍是从高压水喷头3392中喷出高压水。类似地,在需要喷出泡沫时,首先将流通高压水及所选药液的泡沫管路断开,控制摆动电机3383工作,将可切换双喷头339从图10所在的位置调整至泡沫喷头3393在上而高压水喷头3392在下的水平位置,即将可切换双喷头339顺时针摆动90°,此时钢球33914在重力作用下落入第一出口33911处,将高压水喷头3392堵住,开启泡沫管路,水压压紧钢球33914使其保持不动而持续堵塞高压水喷头3392,此时泡沫就从泡沫喷头3393中喷出,在此后的泡沫管路开启期间,由于水压作用,此时无论如何摆动可切换双喷头339,仍是从泡沫喷头3393中喷出泡沫。
本实施例的自动清洗机器人,通过电控箱500(例如按照设定路线)自动行走;在需要收放高压水管900时,卷管电机230工作,驱动通水转轴221和丝杠242联动转动,带动整个卷管轮盘220转动,且导向装置在丝杠242上移动,由此将高压水管900自动缠绕在缠绕辊244上或从缠绕辊244上放出,实现自动收放高压水管900;通过对虹吸阀400的控制可以从虹吸阀400的出液口440输出高压水或混合液,通过可切换双喷头339切换不同喷头时对应喷出高压水或混合液,且可切换喷头339能够多角度摆动,满足多种场景需求,用户体验性高;该机器人自动化程度高,降低人工任务量,清洗效率高,且避免恶劣的清洗环境对身体健康的危害。
实施例二
为了满足机器人的多场景使用,丰富机器人的多功能,在本实施例设置有俯仰调节组件330,以对可切换喷头339的俯仰角度进行调节,俯仰调节组件330包括第三驱动组件和转动连接件,转动连接件套设在支撑臂上且由第三驱动组件驱动其与支撑臂联动转动,以便实现可切换双喷头339的俯仰角度。具体地,在本实施例中,第三驱动组件包括俯仰电机331、链轮链条传动部件(未标记)以及齿轮传动部件(未标记),转动连接件具有齿轮,俯仰电机331的转矩通过链轮链条传动部件以及齿轮传动部件传递至转动连接件上的齿轮,使转动连接件及支撑臂联动转动。
在替代性实施例中,转动连接件也可以采用其他动力传动部件,例如皮带传动等接收俯仰电机331传递的转矩,俯仰电机331与转轴之间的传动也可以是齿轮-齿轮、同步带、链条、联轴器、蜗杆-蜗轮或其组合等形式,其中齿轮可以为直齿轮、斜齿轮或锥齿轮等均可,在此不做限制,只要能将俯仰电机331的转矩传递至转动连接件即可。
实施例三
为了满足机器人的多场景使用,丰富机器人的多功能,支撑臂的长度可调整,从而可调整支撑臂两端均连接喷水组件时两个喷水组件之间的间距,在本实施例中,如图10至图13所示,支撑臂包括左支撑臂部分334和右支撑臂部分335,转动连接件包括左转动连接件336和右转动连接件337,左转动连接件336套设在左支撑臂部分334上,左支撑臂部分334的一端连接有一喷水组件;右转动连接件337套设在右支撑臂部分335上,右支撑臂部分335的一端连接有一喷水组件,其中左转动连接件337和右转动连接件338同时通过如实施例二中描述的链轮链条传动部件以及齿轮传动部件接收俯仰电机331传递的转矩。
如图10和图11所示,矩形管轴332一端插设在左转动连接件336内,另一端插设在右转动连接件337内,且包裹左支撑臂部分334穿过左转动连接件336的一部分以及右支撑臂部分335穿过右转动连接件337的一部分,在本实施例中,左支撑臂部分334和右支撑臂部分335的横截面均为方形且面积均等于矩形管轴332的横截面积的一半,因此,左支撑臂部分334的一部分以及右支撑臂部分335的一部分平行交错插入矩形管轴332内,且在左支撑臂部分334的一端和右支撑臂部分335的一端的相对侧上分别形成有一段第一齿条3341,以及一段第二齿条3351,如图12所示。
再参考图12和图13,为了实现左支撑臂部分334和右支撑臂部分335的同步伸缩,在矩形管轴332上设置有齿轮组件333,齿轮组件333具有齿轮3331,该齿轮3331位于矩形管轴332内且与第一齿条3341和第二齿条3351均啮合,且伸缩电机(未示出)的输出轴与齿轮3331连接,在伸缩电机工作时,其转矩传递至齿轮3331,齿轮3331例如在图12中顺时针转动时,左支撑臂部分334和右支撑臂部分335相对同步缩短,而在逆时针转转动时,左支撑臂部分334和右支撑臂部分335背向同步伸长,从而可以实现两个喷水组件之间距离的伸缩。
优选地,伸缩电机可以通过软轴远程连接齿轮3331,这样,就可以将伸缩电机像摆动电机3383一样置于第一框架210内,或者其他地方。这种柔性传动系统,可避免伸缩电机远离易接触水的区域,降低进水风险,提高伸缩电机使用安全性及可靠性。
而且,在本实施例中,俯仰电机331将转矩传递至左转动连接件336和右转动连接件337而使左转动连接件336和右转动连接件337转动时,由于矩形管轴332的存在,因此,矩形管轴332会随左转动连接件336和右转动连接件337转动而一起转动,矩形管轴332转动会带动左支撑臂部分334和右支撑臂部分335一起转动,从而可实现可切换双喷头339的俯仰角度调节。
实施例四
为了实现可切换双喷头339的高度调整,在本实施例中,通过升降驱动组件320驱动第二框架310升降,如图10所示,在本实施例中,升降驱动组件320包括升降电机321、蜗轮丝杠升降机322、丝杠323和丝杠螺母324,丝杠螺母34与第二框架310固定连接且与丝杠323螺纹连接,在升降电机321工作时,驱动蜗轮丝杠升降机322驱动丝杠323转动,丝杠螺母324沿丝杠323上下移动,从而使固定连接有丝杠螺母324的第二框架310在丝杠323的长度方向上下移动,从而实现可切换双碰头339的距离地面的高度、
实施例五
为了能够实现远程控制机器人的移动,如图1所示,本实施例还设置有遥控装置600,该遥控装置600与电控箱500内的无线接收模块(未示出)通讯,遥控装置600远程发射使机器人动作的遥控信号,例如控制机器人按照设定路线及设定工作进行清洗、控制机器人的行走路线、控制可切换双碰头339的切换、控制喷出高压水或泡沫等。
该遥控装置600内置蓄电池(未示出)和无线发射模块(未示出),其表面面板(未示出)包括开关、应急插线充电口、电量显示及触摸屏,开关控制遥控装置600电路通断,应急插线充电口用于脱机插线充电,电量显示可查看实时电量,触摸屏内置人机交互界面以人机交互操作操作。
该遥控装置600可拆卸地设置在电控箱500上,且在电控箱500上用于放置该遥控装置600的位置处装有磁性充电接口(未示出),将遥控装置600放置在该位置处,电控箱500内的电源信号为该遥控装置600自动充电,且该遥控装置600磁吸附在电控箱500上,不易丢失,提升用户体验度。
实施例六
在高压水管900硬度较大时,仅依靠丝杠组件240和卷管轮盘220,可能会出现高压水管900松散、松弛、打滑或挤管、卡管的问题,为了避免上述问题,以便实现高压水管900紧密均匀地收放,在第二实施例中,如图5所示,导向装置还设置有第一驱动辊243和辅助卷管驱动组件,辅助卷管驱动组件包括辅助卷管电机241和链轮链条传动部件(未标注),辅助卷管电机241通过链轮链条部件将转矩传递至第一驱动辊243,第一驱动辊243与丝杠242平行(优选地位于丝杠242的正上方)并穿过第一导向轮247,第一驱动辊243与第一导向轮247联动转动,在第一导向轮247随第一驱动辊243转动的同时也由于导向框244沿丝杠242移动而沿着第一驱动辊243移动,这种联动转动可以通过将第一驱动辊243的横截面的形状设置成正多边形,且对应地将第一导向轮247的中心通孔的孔壁也设置成相适配的正多边形,当然,这种联动转动的方式不局限于此。
实施例七
在第三实施例中,为了减小第一导向轮247与第一驱动辊243之间的摩擦力,使导向装置轴向滑动更顺畅,如图5和图7所示,还设置有导向辊245,该导向辊245的两端设置在第一框架210上且与丝杠242及第一驱动辊243均平行,对应地在导向框244的顶部设置有圆弧形槽2441,导向辊245的部分外侧表面嵌入该圆弧形槽2441内,辅助导向装置沿丝杠242轴向行走。
实施例八
如图3所示,在第四实施例中,第一框架210上还设置有限位防护辊组250,其在导向装置的前方且对应于第一导向轮247和第二导向轮248之间间隙,该限位防护辊组250包括四个防护辊,两个上下平行的横向防护辊和分别位于横向防护辊两端的竖向防护辊,高压水管900从两个横向防护辊之间的平行间隙穿过,且在收管开始、收管结束、放管开始或放管结束时,竖向防护辊避免高压水管900与周围部件的摩擦,起对高压水管900的保护作用。
实施例九
在第五实施例中,如图4所示,在卷管轮盘220的外周上设置有与通水转轴221平行的一组卷管保护辊组260,卷管保护辊组260包括六个防护辊,其每个设置在第一框架210的相对侧之间且与缠绕辊224具有一定间距,该六个防护辊围绕卷管轮盘220形成一圈,用于在高压水管900缠绕至缠绕辊224上时保护并限位高压水管900,使其紧凑地缠绕在缠绕辊224上。
本发明提出的自动清洗机器人,通过遥控装置600可实现机器人的远程操作,方便操作人员远离恶劣的清洗环境,用户体验度好;可切换双喷头399可实现双喷头切换、高压水柱以及多种不同药液的切换、俯仰角度调整、摆动角度调整以及高度调整,多功能化机器人可满足不同场景下的使用,扩大该机器人的使用范围;四周装有测距传感器,实时监测障碍物距离,实现非接触式导向避障功能,提高该机器人使用智能化;使用柔性传动系统,降低动力电机进水风险,提高其使用安全性及可靠性;卷管轮盘220及丝杠组件240共同实现高压水管900收放管,实现高压水管900紧密均匀地缠绕,且通过自动控制机器人行走速度及收放管速度,可实现行走与高压水管900收放同步,从而保证高压水管900同步铺进且无水管纠缠,避免被车轮碾压;该机器人自动化程度高,减少人工操作,降低安全风险,提高清洗效率及效果。
以上实施例仅用以说明本发明的技术方案,而非对其进行限制;尽管参照前述实施例对本发明进行了详细的说明,对于本领域的普通技术人员来说,依然可以对前述实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或替换,并不使相应技术方案的本质脱离本发明所要求保护的技术方案的精神和范围。
Claims (10)
1.一种自动清洗机器人,其特征在于,包括:
第一驱动组件;
走行部,其由所述第一驱动组件驱动;
第一框架,其由所述走行部承载;
第二驱动组件;
卷管轮盘,其设置在所述第一框架上,且包括两侧盘体、连接两盘体的通水转轴及用于缠绕高压水管的若干个缠绕辊,所述通水转轴由所述第二驱动组件驱动转动并与所述高压水管的出水口连通;
丝杠组件,其包括丝杠和与所述丝杠螺纹连接的导向装置,所述丝杠与所述卷管轮盘联动转动,且所述导向装置用于所述高压水管收放时导向;
至少一个药液箱,各药液箱中药液种类不同;
虹吸阀,其具有至少一个入液口和出液口,各入液口分别与所述通水转轴及各药液箱连通;
喷水组件,其包括摆动驱动组件和可切换双喷头,所述可切换双喷头由所述摆动驱动组件驱动并可摆动,所述可切换双喷头包括切换器、高压水喷头和泡沫喷头,所述切换器包括钢球、入口、第一出口和第二出口,所述入口与所述虹吸阀的出液口连通,所述高压水喷头插设在所述第一出口处,所述泡沫喷头插设在所述第二出口处,所述钢球选择性地阻塞所述入口和第一出口之间的流路或所述入口和第二出口之间的流路;
第二框架,其由所述走行部承载;
支撑臂,其设置在所述第二框架上,且所述支撑臂上连接有至少一个所述喷水组件;
电控箱,用于控制所述自动清洗机器人动作;
电源,其为所述自动清洗机器人中各用电器件供电。
2.根据权利要求1所述的自动清洗机器人,其特征在于,所述自动清洗机器人还包括第三驱动组件和转动连接件,所述转动连接件套设在所述支撑臂上,且所述第三驱动组件驱动所述转动连接件连同所述支撑臂一起转动。
3.根据权利要求2所述的自动清洗机器人,其特征在于,
所述支撑臂包括左支撑臂部分和右支撑臂部分;
所述转动连接件包括左转动连接件和右转动连接件;
所述左转动连接件套设在所述左支撑臂部分上,且所述左支撑臂部分的一端连接有所述喷水组件;
所述右转动连接件套设在所述右支撑臂部分上,且所述右支撑臂部分的一端连接有所述喷水组件;
所述第三驱动组件驱动所述左转动连接件和右转动连接件连同所述左支撑臂部分和右支撑臂部分转动。
4.根据权利要求3所述的自动清洗机器人,其特征在于,所述自动清洗机器人还包括:
管轴,其一端插设在所述左转动连接件内,另一端插设在所述右转动连接件内,且所述左支撑臂部分的另一端和所述右支撑臂部分的另一端均位于所述管轴内,所述管轴与所述左转动连接件和右转动连接件连同转动;所述左支撑臂部分的另一端的一侧面上形成有第一齿条,所述右支撑臂部分的另一端的一侧面上形成有与所述第一齿条相对的第二齿条;
齿轮组件,其固定在所述管轴上且所述齿轮组件中的齿轮与所述第一齿条和第二齿条均啮合;
伸缩电机,其输出轴与所述齿轮组件的齿轮连接。
5.根据权利要求1至4中任一项所述的自动清洗机器人,其特征在于,所述摆动驱动组件包括:
摆动电机;
蜗杆,其与所述摆动电机的输出轴连接;
蜗轮,其与所述蜗杆配合;
摆动管轴,其穿设在所述蜗轮的中心,其一端与所述切换器的入口连通,另一端与所述虹吸阀的出液口连通。
6.根据权利要求5所述的自动清洗机器人,其特征在于,所述摆动电机通过软轴与所述蜗杆连接。
7.根据权利要求1至4中任一项所述的自动清洗机器人,其特征在于,所述自动清洗机器人还包括升降驱动组件,其驱动所述第二框架升降。
8.根据权利要求1至4中任一项所述的自动清洗机器人,其特征在于,所述导向装置包括:
导向框;
螺纹块,其设置在所述导向框底部且具有螺纹通孔,所述丝杠与所述螺纹孔螺纹连接;
辅助卷管驱动组件;
第一驱动辊,其由所述辅助卷管驱动组件驱动转动,且所述第一驱动辊与所述丝杠平行并穿过所述导向框;
第一导向轮,其设置在所述导向框内并套设在所述第一驱动辊上,且所述第一导向轮随所述第一驱动辊转动而转动;
第二导向轮,其转动设置在所述导向框内且与所述第一导向轮平行,所述高压水管从所述第一导向轮和第二导向轮之间的间隙穿过。
9.根据权利要求8所述的自动清洗机器人,其特征在于,所述自动清洗机器人还包括设置在所述第一框架上且与所述第一驱动辊平行的导向辊,所述导向框的顶部开设有圆弧形槽,所述导向辊的部分外侧表面嵌入所述圆弧形槽内。
10.根据权利要求1至4中任一项所述的自动清洗机器人,其特征在于,所述自动清洗机器人还包括与所述电控箱内无线接收模块通讯的遥控装置,所述遥控装置远程发射使所述自动清洗机器人动作的遥控信号。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201911101743.7A CN111014131B (zh) | 2019-11-12 | 2019-11-12 | 一种自动清洗机器人 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201911101743.7A CN111014131B (zh) | 2019-11-12 | 2019-11-12 | 一种自动清洗机器人 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN111014131A true CN111014131A (zh) | 2020-04-17 |
| CN111014131B CN111014131B (zh) | 2024-08-20 |
Family
ID=70205472
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201911101743.7A Active CN111014131B (zh) | 2019-11-12 | 2019-11-12 | 一种自动清洗机器人 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN111014131B (zh) |
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111468455A (zh) * | 2020-04-21 | 2020-07-31 | 鞍山极致创新科技有限公司 | 一种猪场粪道清洗机器人 |
| CN111468490A (zh) * | 2020-04-29 | 2020-07-31 | 科立盈智能装备科技(广州)有限公司 | 一种罐体自动清洗系统 |
| CN111644364A (zh) * | 2020-06-16 | 2020-09-11 | 中铁环境科技工程有限公司 | 一种盾构渣土筛分方法 |
| CN111921752A (zh) * | 2020-07-09 | 2020-11-13 | 龙井和 | 一种工业自动化喷涂机器人 |
| CN113142063A (zh) * | 2021-03-16 | 2021-07-23 | 广东南牧机械设备有限公司 | 养殖场的清洗机器人 |
| WO2022048183A1 (zh) * | 2020-09-07 | 2022-03-10 | 丰疆智能(深圳)有限公司 | 粪沟清洗装置 |
| WO2022122003A1 (zh) * | 2020-12-11 | 2022-06-16 | 丰疆智能(深圳)有限公司 | 粪沟清洗机以及粪沟清洗方法 |
| CN114769195A (zh) * | 2022-03-31 | 2022-07-22 | 河南云迹智能技术有限公司 | 一种自动清洁的户外自动售货柜 |
| CN115250957A (zh) * | 2022-08-08 | 2022-11-01 | 安徽农业大学 | 一种便于清洁的肉鸽舍 |
| CN115501367A (zh) * | 2022-10-19 | 2022-12-23 | 镇江市动物疫病预防控制中心 | 一种现代化畜禽养殖用环境消毒装置 |
| WO2022271003A1 (es) * | 2021-06-25 | 2022-12-29 | Instituto Tecnológico y de Estudios Superiores de Monterrey | Robot modular reconfigurable teleoperado multipropósito |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20100294872A1 (en) * | 2009-05-20 | 2010-11-25 | Hsin-Fa Wang | Water hose winding device |
| CN202570694U (zh) * | 2012-03-15 | 2012-12-05 | 天津哈马特高压水射流技术开发有限公司 | 高压水管道清洗旋转进给器 |
| CN104455545A (zh) * | 2014-11-28 | 2015-03-25 | 合肥鑫晟光电科技有限公司 | 自切换t型三通接头及卡夹清洗干燥装置 |
| CN104815815A (zh) * | 2015-04-30 | 2015-08-05 | 苏州黑猫(集团)有限公司 | 清洗机用压力提升式出水装置 |
| CN206576046U (zh) * | 2017-03-06 | 2017-10-24 | 青岛美联清洗设备有限公司 | 一种自动清洗机器人 |
| CN107372433A (zh) * | 2017-08-17 | 2017-11-24 | 北京农业智能装备技术研究中心 | 一种风送施药装置及方法 |
| CN207271769U (zh) * | 2017-06-23 | 2018-04-27 | 德州恒丰纺织有限公司 | 纺织车间负压杂质清理系统 |
| CN211707513U (zh) * | 2019-11-12 | 2020-10-20 | 青岛美联清洗设备有限公司 | 一种自动清洗机器人 |
-
2019
- 2019-11-12 CN CN201911101743.7A patent/CN111014131B/zh active Active
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20100294872A1 (en) * | 2009-05-20 | 2010-11-25 | Hsin-Fa Wang | Water hose winding device |
| CN202570694U (zh) * | 2012-03-15 | 2012-12-05 | 天津哈马特高压水射流技术开发有限公司 | 高压水管道清洗旋转进给器 |
| CN104455545A (zh) * | 2014-11-28 | 2015-03-25 | 合肥鑫晟光电科技有限公司 | 自切换t型三通接头及卡夹清洗干燥装置 |
| CN104815815A (zh) * | 2015-04-30 | 2015-08-05 | 苏州黑猫(集团)有限公司 | 清洗机用压力提升式出水装置 |
| CN206576046U (zh) * | 2017-03-06 | 2017-10-24 | 青岛美联清洗设备有限公司 | 一种自动清洗机器人 |
| CN207271769U (zh) * | 2017-06-23 | 2018-04-27 | 德州恒丰纺织有限公司 | 纺织车间负压杂质清理系统 |
| CN107372433A (zh) * | 2017-08-17 | 2017-11-24 | 北京农业智能装备技术研究中心 | 一种风送施药装置及方法 |
| CN211707513U (zh) * | 2019-11-12 | 2020-10-20 | 青岛美联清洗设备有限公司 | 一种自动清洗机器人 |
Cited By (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111468455A (zh) * | 2020-04-21 | 2020-07-31 | 鞍山极致创新科技有限公司 | 一种猪场粪道清洗机器人 |
| CN111468490A (zh) * | 2020-04-29 | 2020-07-31 | 科立盈智能装备科技(广州)有限公司 | 一种罐体自动清洗系统 |
| CN111468490B (zh) * | 2020-04-29 | 2024-06-14 | 科立盈智能装备科技(广州)有限公司 | 一种罐体自动清洗系统 |
| CN111644364B (zh) * | 2020-06-16 | 2022-03-01 | 中铁环境科技工程有限公司 | 一种盾构渣土筛分方法 |
| CN111644364A (zh) * | 2020-06-16 | 2020-09-11 | 中铁环境科技工程有限公司 | 一种盾构渣土筛分方法 |
| CN111921752A (zh) * | 2020-07-09 | 2020-11-13 | 龙井和 | 一种工业自动化喷涂机器人 |
| CN111921752B (zh) * | 2020-07-09 | 2021-10-15 | 陕西微阅信息技术有限公司 | 一种工业自动化喷涂机器人 |
| WO2022048183A1 (zh) * | 2020-09-07 | 2022-03-10 | 丰疆智能(深圳)有限公司 | 粪沟清洗装置 |
| WO2022122003A1 (zh) * | 2020-12-11 | 2022-06-16 | 丰疆智能(深圳)有限公司 | 粪沟清洗机以及粪沟清洗方法 |
| CN113142063A (zh) * | 2021-03-16 | 2021-07-23 | 广东南牧机械设备有限公司 | 养殖场的清洗机器人 |
| WO2022271003A1 (es) * | 2021-06-25 | 2022-12-29 | Instituto Tecnológico y de Estudios Superiores de Monterrey | Robot modular reconfigurable teleoperado multipropósito |
| CN114769195A (zh) * | 2022-03-31 | 2022-07-22 | 河南云迹智能技术有限公司 | 一种自动清洁的户外自动售货柜 |
| CN115250957A (zh) * | 2022-08-08 | 2022-11-01 | 安徽农业大学 | 一种便于清洁的肉鸽舍 |
| CN115250957B (zh) * | 2022-08-08 | 2024-03-15 | 安徽农业大学 | 一种便于清洁的肉鸽舍 |
| CN115501367A (zh) * | 2022-10-19 | 2022-12-23 | 镇江市动物疫病预防控制中心 | 一种现代化畜禽养殖用环境消毒装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN111014131B (zh) | 2024-08-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN111014131A (zh) | 一种自动清洗机器人 | |
| EP1152656B1 (en) | Device for the cleaning of animal stalls | |
| CN211707513U (zh) | 一种自动清洗机器人 | |
| CN103272791B (zh) | 监控摄像头清洁装置 | |
| CN210808938U (zh) | 一种园林用喷洒效率高的新型双向药物喷洒装置 | |
| CN116832559B (zh) | 一种建筑施工降尘设备 | |
| CN219844726U (zh) | 一种林业虫害防治用喷药机 | |
| CN210683254U (zh) | 一种污水处理加药装置 | |
| WO2022122003A1 (zh) | 粪沟清洗机以及粪沟清洗方法 | |
| JPH08290079A (ja) | 回転揺動スプリンクラ | |
| CN215530686U (zh) | 粪沟清洗机 | |
| CN215269961U (zh) | 养殖场的清洗机器人 | |
| CN211275776U (zh) | 一种高压喷淋清洗机 | |
| CN212593204U (zh) | 一种智能管理无人喷雾装置 | |
| CN212632166U (zh) | 一种大气污染防治喷淋设备管网结构 | |
| CN209463085U (zh) | 小型喷灌机 | |
| CN218499702U (zh) | 一种用于蔬菜大棚的喷洒装置 | |
| CN212937555U (zh) | 一种农业种植用混合喷洒设备 | |
| CN210253426U (zh) | 一种高层水箱清洗装置 | |
| CN214924478U (zh) | 一种可远程控制的消毒机器人 | |
| CN218747765U (zh) | 一种粪沟清洗机器人 | |
| CN213587264U (zh) | 一种车载式除虫剂喷洒装置 | |
| CN218188714U (zh) | 一种喷淋式降尘装置 | |
| CN214682510U (zh) | 一种适用于规模化猪场的自动喷药机器人 | |
| CN213926052U (zh) | 一种市政工程用环保型洒水装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |