CN110579924B - 镜头移动装置 - Google Patents
镜头移动装置 Download PDFInfo
- Publication number
- CN110579924B CN110579924B CN201910765960.XA CN201910765960A CN110579924B CN 110579924 B CN110579924 B CN 110579924B CN 201910765960 A CN201910765960 A CN 201910765960A CN 110579924 B CN110579924 B CN 110579924B
- Authority
- CN
- China
- Prior art keywords
- damper
- damping
- moving device
- housing
- lens
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images








































Classifications
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B7/00—Mountings, adjusting means, or light-tight connections, for optical elements
- G02B7/02—Mountings, adjusting means, or light-tight connections, for optical elements for lenses
- G02B7/04—Mountings, adjusting means, or light-tight connections, for optical elements for lenses with mechanism for focusing or varying magnification
- G02B7/09—Mountings, adjusting means, or light-tight connections, for optical elements for lenses with mechanism for focusing or varying magnification adapted for automatic focusing or varying magnification
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B7/00—Mountings, adjusting means, or light-tight connections, for optical elements
- G02B7/02—Mountings, adjusting means, or light-tight connections, for optical elements for lenses
- G02B7/04—Mountings, adjusting means, or light-tight connections, for optical elements for lenses with mechanism for focusing or varying magnification
- G02B7/08—Mountings, adjusting means, or light-tight connections, for optical elements for lenses with mechanism for focusing or varying magnification adapted to co-operate with a remote control mechanism
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/64—Imaging systems using optical elements for stabilisation of the lateral and angular position of the image
- G02B27/646—Imaging systems using optical elements for stabilisation of the lateral and angular position of the image compensating for small deviations, e.g. due to vibration or shake
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B3/00—Focusing arrangements of general interest for cameras, projectors or printers
- G03B3/10—Power-operated focusing
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B2205/00—Adjustment of optical system relative to image or object surface other than for focusing
- G03B2205/0053—Driving means for the movement of one or more optical element
- G03B2205/0069—Driving means for the movement of one or more optical element using electromagnetic actuators, e.g. voice coils
Abstract
实施方式提供了一种镜头移动装置,其包括:壳体,该壳体支承驱动磁体并且具有开口;骨架,该骨架在其外周表面处设置有位于驱动磁体的内侧的线圈,该骨架经由驱动磁体与线圈之间的电磁相互作用在壳体内沿平行于光轴的第一方向移动;以及阻尼器,该阻尼器位于壳体与骨架之间。
Description
本申请是申请日为2015年4月24日、申请号为201510202622.7、发明名称为“镜头移动装置”的发明专利申请的分案申请。
相关申请的交叉引用
本申请要求于2014年4月24日在韩国提交的韩国专利申请No.10-2014-0049273、于2014年5月9日在韩国提交的韩国专利申请No.10-2014-0055362、以及于2014年7月29日在韩国提交的韩国专利申请No.10-2014-0096577的优先权,这些申请通过参引被全部并入此处,如同在本文中充分陈述那样。
技术领域
实施方式涉及镜头移动装置,并且更特别地涉及通过减轻骨架在镜头的运动期间或实施自动对焦期间在光轴方向上的振动来防止骨架在光轴方向上的共振的镜头移动装置。
背景技术
近年来,已经积极地研发了配备迷你数码相机的IT产品,例如,移动电话、智能手机、平板电脑以及笔记本电脑。
配备有常规的迷你数码相机的IT产品结合有用于通过调节镜头与将外部光线转换成数码图像的图像传感器之间的距离而将镜头的焦距对准的镜头移动装置。
然而,常规的迷你数码相机构造成基于形成在图像传感器上的数码图像的取决于镜头与图像传感器之间的距离的清晰度来实施用于确定图像传感器的产生最清晰的图像的点的控制操作,从而用于自动对焦的实施。在如上所述的自动对焦的实施期间,配备有镜头的骨架沿光轴方向移动。然而,骨架在光轴方向上的运动可能会引起骨架在光轴方向上的振动。当骨架在光轴方向上的振动的频率变得与骨架和壳体的自然振动频率接近或一致时,在通过弹性构件彼此连接的骨架与壳体之间可能会发生有问题的共振。
发明内容
因此,本发明的实施方式提供了一种用以解决相关技术的问题的镜头移动装置。更具体地,本发明的实施方式提供了一种用以消除镜头的运动期间或实施自动对焦期间的共振的镜头移动装置。另外,本发明的实施方式提供了一种更加有效地消除镜头的运动期间或实施自动对焦期间的共振的镜头移动装置。
在一个实施方式中,提供了一种镜头移动装置,该镜头移动装置包括:壳体,该壳体支承驱动磁体并且具有开口;骨架,该骨架在其外周表面处设置有位于驱动磁体的内侧的线圈,该骨架经由驱动磁体与线圈之间的电磁相互作用在壳体内沿平行于光轴的第一方向移动;以及阻尼器,该阻尼器位于壳体与骨架之间。
在另一实施方式中,提供了一种镜头移动装置,该镜头移动装置包括:壳体,该壳体支承驱动磁体并且具有开口;骨架,该骨架在其外周表面处设置有位于驱动磁体的内侧的线圈,该骨架经由驱动磁体与线圈之间的电磁相互作用在壳体内沿平行于光轴的第一方向移动;上弹性构件和下弹性构件,上弹性构件和下弹性构件分别设置在骨架和壳体的上表面和下表面处,每个弹性构件均包括联接至骨架的内框架以及联接至壳体的外框架;以及阻尼器,该阻尼器位于上弹性构件和下弹性构件中的至少一个弹性构件的内框架与壳体之间。
在又一实施方式中,提供了一种镜头移动装置,该镜头移动装置包括:移动单元,该移动单元包括骨架;固定单元,该固定单元包括从骨架向外间隔开规定距离以使移动单元移动的壳体;弹性单元,该弹性单元连接至骨架和壳体以向移动单元提供返回力;以及阻尼器构件,该阻尼器构件位于壳体与弹性单元之间。
附图说明
可以参照以下附图详细地描述布置和实施方式,在附图中,相同的附图标记指示相同的元件,并且在附图中:
图1为示出了根据实施方式的镜头移动装置的示意性立体图;
图2为示出了根据该实施方式的镜头移动装置的示意性分解立体图;
图3为示出了在相比于图1移除了罩构件之后的镜头移动装置的示意性立体图;
图4为图3的示意性平面图;
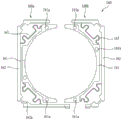
图5为示出了根据该实施方式的壳体的示意性立体图;
图6为示出了从与图5不同的角度观察到的壳体的示意性立体图;
图7为示出了根据该实施方式的壳体的示意性仰视立体图;
图8为示出了根据该实施方式的壳体的示意性分解立体图;
图9为示出了根据该实施方式的上弹性构件的示意性平面图;
图10为示出了根据该实施方式的下弹性构件的示意性平面图;
图11为示出了根据该实施方式的骨架的示意性立体图;
图12为示出了根据该实施方式的骨架的示意性仰视立体图;
图13为示出了根据该实施方式的骨架的示意性分解立体图;
图14为图13的局部放大立体图;
图15为图13的局部放大仰视图;
图16为示出了根据该实施方式的接纳凹部的示意性局部放大立体图;
图17为示出了根据该实施方式的骨架的示意性纵向截面图;
图18为示出了根据该实施方式的骨架和壳体的仰视图;
图19为示出了根据一个实施方式的骨架、壳体以及罩构件的示意性纵向截面图;
图20为示出了根据另一实施方式的骨架、壳体以及罩构件的示意性纵向截面图;
图21为示出了根据再一实施方式的骨架和罩构件的示意性纵向截面图;
图22为示出了根据另一实施方式的骨架和壳体的示意性底侧视图;
图23a为示出了不具有阻尼器的常规镜头移动装置的在光轴方向上的振动的曲线图;图23b为示出了根据该实施方式的镜头移动装置的在光轴方向上的振动的曲线图;以及图23c为示出了在阻尼器被用于镜头移动装置的清洗过程损坏的情况下的根据该实施方式的镜头移动装置的在光轴方向上的振动的曲线图;
图24为示出了根据一个实施方式的阻尼器和阻尼连接部的示意性局部放大立体图;
图25为示出了根据该实施方式的阻尼器和阻尼连接部的示意性局部放大平面图;
图26为示出了根据该实施方式的阻尼器和阻尼连接部的沿着图25的线A-A截取的示意性局部放大纵向截面图;
图27为示出了根据第一另外实施方式的阻尼突出部的示意性局部放大平面图;
图28为示出了根据第二另外实施方式的阻尼突出部的示意性局部放大平面图;
图29为示出了根据第三另外实施方式的阻尼突出部的示意性局部放大平面图;
图30为示出了根据第四另外实施方式的阻尼突出部的示意性局部放大平面图;
图31为示出了根据另外实施方式的阻尼接纳凹部的示意性纵向截面图;
图32为示出了根据另一实施方式的阻尼器和阻尼连接部的示意性平面图和局部放大图;
图33a为示出了不具有阻尼器的常规镜头移动装置的在光轴方向上的振动的曲线图,以及图33b为示出了根据该实施方式的镜头移动装置的在光轴方向上的振动的曲线图;
图34为示出了根据另一实施方式的镜头移动装置的分解立体图;
图35为示出了根据该实施方式的不具有罩构件的镜头移动装置的立体图;
图36为示出了根据该实施方式的壳体和上弹性构件的视图;
图37为图36的侧向截面图;以及
图38为示出了在常规镜头移动装置以及根据该实施方式的镜头移动装置的运动期间所获得的曲线的视图。
具体实施方式
下文中,将参照附图描述实施方式。在附图中,即使相同或相似的元件被描绘在不同的附图中,但是相同或相似的元件由相同的附图标记指示。在以下描述中,将省略对使得本公开的主题不太清楚的结合在本文中的已知功能和构型的详细描述。本领域的技术人员将理解到,为了便于说明,附图中的某些特征被放大、减小或简化,并且附图及其元件并非总是以合适的比率示出。
为了参照,在各个图中,可以使用直角坐标系(x、y、z)。在附图中,x和y轴意味着垂直于光轴的平面,并且为了方便,光轴(z轴)方向可以被称作第一方向,x轴方向可以被称作第二方向,并且y轴方向可以被称作第三方向。
第一实施方式
图1为示出了根据实施方式的镜头移动装置100的示意性立体图,图2为示出了根据该实施方式的镜头移动装置100的示意性分解立体图,图3为示出了在相比于图1移除了罩构件300之后的镜头移动装置100的示意性立体图,图4为图3的示意性平面图,图5为示出了根据该实施方式的壳体140的示意性立体图,图6为示出了从与图5不同的角度观察到的壳体140的示意性立体图,图7为示出了根据该实施方式的壳体140的示意性仰视立体图,图8为示出了根据该实施方式的壳体140的示意性分解立体图,图9为示出了根据该实施方式的上弹性构件150的示意性平面图,以及图10为示出了根据该实施方式的下弹性构件160的示意性平面图。
根据本实施方式的镜头移动装置100为调节摄像头模块的图像传感器与镜头之间的距离以将图像传感器定位在镜头的焦距处的装置。也就是说,镜头移动装置100用于实施自动对焦。
如图1至图4中示例性示出的,根据本实施方式的镜头移动装置100包括罩构件300、上弹性构件150、骨架110、包绕骨架110的线圈120、壳体140、驱动磁体130、固定至壳体140的印刷电路板170、下弹性构件160、基部210、确定骨架110在光轴方向(即,第一方向)上的位移的位移感测单元、以及用作减振器的阻尼器。
罩构件300大致呈盒的形式并且构造成联接至基部210的顶部。罩构件300与基部210一起限定了接纳空间。上弹性构件150、骨架110、包绕骨架110的线圈120、壳体140、驱动磁体130以及固定至壳体140的印刷电路板170接纳在该接纳空间中。
罩构件300具有形成在其上表面中的开口以允许联接至骨架110的镜头暴露于外部光线。另外,该开口可以设置有由透光材料形成的窗。因此,可以防止杂质——例如灰尘和湿气——进入摄像头模块。
罩构件300可以具有形成在其下端部中的第一凹部310。此时,如下文将进行描述的,基部210可以在基部210的在罩构件300与基部210联接至彼此时与第一凹部310接触的部分处(即,在与第一凹部310对应的位置处)具有第二凹部211。在罩构件300与基部210联接时,可以经由第一凹部310与第二凹部211的结合形成各自具有给定的面积的凹部。可以向这些凹部应用粘性的粘合构件。也就是说,应用至这些凹部的粘合构件可以通过这些凹部填入罩构件300与基部210的面向彼此的表面之间的间隙中,从而允许罩构件300与基部210联接至彼此以及密封罩构件300与基部210之间的间隙。另外,粘合构件在罩构件300与基部210联接至彼此时可以密闭地密封罩构件300与基部210的侧表面。
另外,罩构件300可以具有形成在罩构件300的与印刷电路板170的端子表面对应的表面中的第三凹部320以便使罩构件300不与形成在端子表面处的多个端子相干涉。第三凹部320可以在面向端子表面的整个表面中被凹进。在将粘合构件应用至第三凹部320内时,罩构件300、基部210以及印刷电路板170可以被密封。另外,粘合构件可以在罩构件300与基部210联接至彼此时密闭地密封罩构件300和基部210的侧表面。
尽管第一凹部310、第二凹部211以及第三凹部320分别形成在基部210和罩构件300处,但是该实施方式不限于此,并且可以仅在基部210中形成或者可以仅在罩构件300中形成具有类似形状的凹部。
基部210可以大致具有正方形形状,并且通过联接至罩构件300而限定用于接纳骨架110和壳体140的空间。
基部210具有向外突出规定厚度以围绕基部210的下缘的突出部。突出部的规定厚度可以等于罩构件300的侧表面的厚度。当罩构件300联接至基部210时,罩构件300的侧表面可以坐置、设置在突出部的上表面或侧表面上、与该上表面或侧表面接触、或者联接至该上表面或侧表面。因此,突出部可以通过与罩构件300的端部进行表面接触来引导联接至突出部的顶部的罩构件300。罩构件300的端部可以包括罩构件300的底表面或侧表面。此时,突出部与罩构件300的端部可以利用例如粘合剂附接至彼此并且彼此密封。
突出部可以在与罩构件300的第一凹部310对应的位置处设置有第二凹部211。如上所述,第二凹部211可以与罩构件300的第一凹部310结合以限定凹部以及限定用于粘合构件的填入的空间。
基部210具有中央开口。该开口形成在与设置在摄像头模块中的图像传感器的位置对应的位置处。
另外,基部210包括从其四个拐角处垂直于该基部210向上突出了规定高度的四个引导构件216。引导构件216可以具有多边柱形。引导构件216可以插入到将在下文描述的壳体140的下引导槽148中、或者固定或联接至该下引导槽148。因此,当壳体140坐置或设置在基部210的顶部上时,引导构件216和下引导槽148可以引导壳体140到基部210上的联接位置,并且同时防止例如因镜头移动装置100的操作期间的振动或者因工作人员在联接期间的失误引起的壳体140与安装目标基准位置偏离。
如图4至图9中示例性示出的,壳体140可以大致具有开口以及如图4至图9中示出的中空柱形形状(例如,中空方柱形形状)。壳体140构造成支承至少两个驱动磁体130和印刷电路板170。骨架110接纳在壳体140中以便能够相对于壳体140沿第一方向移动。
壳体140具有四个平坦的侧表面141。壳体140的每个侧表面141均可以具有等于或大于驱动磁体130中相应的一个驱动磁体的面积的面积。
如图8中示例性地示出的,在壳体140的四个侧表面141中,面向彼此的两个侧表面分别设置有磁体穿过孔口141a或凹部,驱动磁体130坐置、布置或固定在磁体穿过孔口141a或凹部中。磁体穿过孔口141a或凹部可以具有与驱动磁体130对应的尺寸和形状并且可以具有实施引导功能的任何其他形状。可以分别将第一驱动磁体131和第二驱动磁体132、即两个驱动磁体130安装至磁体穿过孔口141a。
另外,在壳体140的四个侧表面141中,垂直于上述两个侧表面的一个侧表面或者除上述两个侧表面外的任一侧表面可以设置有传感器穿过孔口141b,如下所述的位置传感器180插入、布置、固定或坐置在传感器穿过孔口141b中。传感器穿过孔口141b可以具有与如下所述的位置传感器180对应的尺寸和形状。另外,设置有传感器穿过孔口141b的侧表面还设置有辅助印刷电路板170的安装、布置、临时固定或完全固定的至少一个安装突出部149。安装突出部149构造成插入到形成在如下所述的印刷电路板170中的安装孔口173中。此时,尽管安装孔口173和安装突出部149可以以形状配合的方式或者过盈配合的方式联接至彼此,但是,安装孔口173和安装突出部149可以仅仅实施引导功能。
此处,壳体140的四个侧表面141中的与上述侧表面相对的另一侧表面可以为平坦的实心表面,但是其并不限于此。
在壳体140的另外实施方式中,在壳体140的四个侧表面141中,面向彼此的两个侧表面设置有第一磁体穿过孔口141a和第二磁体穿过孔口141a’,驱动磁体130坐置、布置或固定在第一磁体穿过孔口141a和第二磁体穿过孔口141a’中。另外,在壳体140的四个侧表面141中,垂直于上述两个侧表面的一个侧表面或者除上述两个侧表面以外的任一侧表面可以设置有第三磁体穿过孔口以及与第三磁体穿过孔口间隔了规定距离的传感器穿过孔口141b。此外,在壳体140的四个侧表面141中,面向设置有第三磁体穿过孔口的上述侧表面的另一侧表面可以设置有第四磁体穿过孔口。
也就是说,壳体140的四个侧表面141设置有四个磁体穿过孔口和单个传感器穿过孔口141b。
此时,第一磁体穿过孔口141a与第二磁体穿过孔口141a’具有相同的尺寸和相同的形状,并且还在壳体140的侧表面的整个横向长度上具有(几乎)相同的横向长度。另一方面,第三磁体穿过孔口与第四磁体穿过孔口可以具有相同的尺寸和相同的形状,并且还可以具有比第一磁体穿过孔口141a和第二磁体穿过孔口141a’更小的横向长度。这起到了获得用于传感器穿过孔口141b的空间的作用,这是因为设置有第三磁体穿过孔口的侧表面必须设置传感器穿过孔口141b。
自然地将理解到,第一驱动磁体131至第四驱动磁体分别坐置、布置或固定在第一磁体穿过孔口至第四磁体穿过孔口中。此时,同样地,第一驱动磁体131与第二驱动磁体132具有相同的尺寸和相同的形状,并且还在壳体140的侧表面的整个横向长度上具有几乎相同的横向长度。另外,第三驱动磁体与第四驱动磁体可以具有相同的尺寸和相同的形状,并且还可以具有比第一驱动磁体131与第二驱动磁体132更小的横向长度。
此处,第三磁体穿过孔口与第四磁体穿过孔口可以关于基于壳体140的中心的线对称地设置。也就是说,第三驱动磁体130和第四驱动磁体130可以关于基于壳体140的中心的线对称地设置。在第三驱动磁体130与第四驱动磁体130无论壳体140的中心如何均彼此相对地朝向一侧偏离地设置的情况下,可以向骨架110的线圈120施加朝向一侧偏离的电磁力,从而使骨架110的倾斜变得可能。换句话说,当第三驱动磁体130和第四驱动磁体130关于基于壳体140的中心的线对称地设置时,可以向骨架110和线圈120施加电磁力而没有偏离,这确保了骨架110在第一方向上的简单且准确的引导。
另外,如图3至图6以及图8中示例性示出的,可以从壳体140的上表面突出多个第一止挡件143。第一止挡件143用于在产生外部冲击时防止罩构架300与壳体140的本体之间的碰撞,并且可以防止壳体140的上表面与罩构件300的内顶表面直接碰撞。另外,第一止挡件143可以用于引导上弹性构件150的安装位置。为此,如图9中示例性示出的,上弹性构件150可以在与第一止挡件143对应的位置处设置有引导槽155,该引导槽155具有与第一止挡件143的形状对应的形状。
另外,多个上框架支承凸台144可以从壳体140的顶部突出以联接至上弹性构件150的外框架152。如下文将描述的,上弹性构件150的与上框架支承凸台144对应的外框架152可以形成有具有与上框架支承凸台144的形状对应的形状的第一通孔152a或凹部。上框架支承凸台144可以利用粘合剂或者经由熔合固定至第一通孔152a或凹部。熔合可以例如为热熔合或超声熔合。
另外,如图7中示例性示出的,多个下框架支承凸台147可以从壳体140的底部突出以联接至下弹性构件160的外框架162。下弹性构件160的与下框架支承凸台147对应的外框架162可以形成有具有与下框架支承凸台147的形状对应的形状的插入凹部162a或孔。下框架支承凸台147可以利用粘合剂或者经由熔合固定至插入凹部162a或孔。熔合可以例如为热熔合或超声熔合。
尽管驱动磁体130可以利用粘合剂固定至磁体穿过孔口141a,但是该实施方式不限于此,并且可以使用诸如双面胶带之类的粘合构件。在替代性实施方式中,代替磁体穿过孔口141a,在壳体140的内表面中可以形成凹进的磁体座。磁体座可以具有与驱动磁体130的尺寸和形状对应的尺寸和形状。
驱动磁体130可以安装在与包绕骨架110的线圈120对应的位置处。另外,驱动磁体130可以构造成一个整体。在本实施方式中,每个驱动磁体130可以以使得每个驱动磁体130的面向包绕骨架110的线圈120的一个表面为N极并且每个驱动磁体130的相反的外表面为S极的方式定向。然而,该实施方式不限于此,并且驱动磁体130可以以其他方式定向。另外,驱动磁体130可以被平分在垂直于光轴的平面中。
驱动磁体130可以构造成具有恒定宽度的立方体,并且驱动磁体130可以坐置在磁体穿过孔口141a或凹部中,使得驱动磁体130的宽表面构成了壳体140的侧表面的一部分。此时,面向彼此的驱动磁体130可以彼此平行地安装。另外,驱动磁体130可以设置成面向骨架110的线圈120。此时,驱动磁体130和骨架110的线圈120的面向彼此的表面可以布置在平行的平面中。然而,该实施方式不限于此。根据设计,驱动磁体以及骨架110的线圈120中的仅一者可以形成为平面,而另一者可以形成为曲面。替代性地,骨架110的线圈120和驱动磁体130的面向彼此的表面可以都为曲面。此时,骨架110的线圈120和驱动磁体130的面向彼此的表面可以具有相同的曲率。
如上所述,传感器穿过孔口141b或凹部形成在壳体140的一个侧表面中,位置传感器180插入、布置或坐置在传感器穿过孔口141b中,并且位置传感器180经由焊接电联接至印刷电路板170的一个表面。换句话说,印刷电路板170可以固定至壳体140的四个侧表面141中的设置有传感器穿过孔口141b或凹部的侧表面的外部、由该侧表面的外部支承或者设置在该侧表面的外部处。
如下所述,位置传感器180可以与骨架110的感测磁体190一起构成确定骨架110在第一方向上的第一位移值的位移感测单元。为此,位置传感器180和传感器穿过孔口141b或凹部位于与感测磁体190的位置对应的位置处。
位置传感器180可以为感测由骨架110的感测磁体190产生的磁力的变化的传感器。另外,位置传感器180可以为霍尔传感器。然而,霍尔传感器是作为示例给出,并且本实施方式不限于霍尔传感器。可以使用能够感测磁力的变化的任何其他传感器,并且可以使用能够感测位置而非磁力的任何其他传感器。例如,可以使用光反射器。
印刷电路板170可以联接至壳体140的一个侧表面或者设置在该侧表面处,并且如上所述印刷电路板170可以具有安装孔口173或凹部。以此方式,印刷电路板170的安装位置可以由形成在壳体140的一个侧表面处的安装突出部149来引导。
另外,在印刷电路板170处可以设置多个端子171。端子171可以接收外部电力并向骨架110的线圈120以及位置传感器180供给电流。形成在印刷电路板170处的端子171的数量可以根据需要被控制的构成元件的类型来减小或增大。根据本实施方式,印刷电路板170可以为柔性印刷电路板(FPCB)。
印刷电路板170可以包括基于由位移感测单元感测到的第一位移值来重新调节施加至线圈120的电流量的控制器。也就是说,控制器安装在印刷电路板170上。在另一实施方式中,控制器可以安装在单独的基板上而非安装在印刷电路板170上。单独的基板可以为安装摄像头模块的图像传感器的基板,或者其他基板中的任一基板。
还可以基于与由霍尔传感器检测到的磁通量(即,磁通密度)的变化有关的霍尔电压差来校准致动器驱动距离。
骨架110构造成相对于在第一周向方向上固定的壳体140沿第一轴向方向往复运动。经由骨架110在第一轴向方向上的运动来实施自动对焦。
下文将参照附图更加详细地描述骨架110。
同时,上弹性构件150和下弹性构件160可以弹性地支承骨架110在光轴方向上的向上运动和/或向下运动。上弹性构件150和下弹性构件160可以为片簧。
如图2至图4以及图9和图10中示例性示出的,上弹性构件150和下弹性构件160可以分别包括:联接至骨架110的内框架151和161、联接至壳体140的外框架152和162、以及将内框架151和161与外框架152和162连接至彼此的连接部153和163。
连接部153和163可以弯曲至少一次以限定给定的图案形状。通过连接部153和163的位置变化和微小变形,骨架110在光轴方向上、即在第一方向上的向上运动和/或向下运动可以被柔性地(或弹性地)支持。
根据本实施方式,如图9中示例性示出的,上弹性构件150具有形成在外框架152中的第一通孔152a以及形成在内框架151中的多个第二通孔151a。
第一通孔152a可以与形成在壳体140的上表面处的上框架支承凸台144接合,并且第二通孔151a或凹部可以与如下所述的形成在骨架110的上表面处的上支承凸台接合。也就是说,外框架152利用第一通孔152a固定并联接至壳体140,并且内框架151利用第二通孔151a或凹部固定并联接至骨架110。
连接部153将内框架151与外框架152连接至彼此,使得内框架151能够在规定范围内相对于外框架152沿第一方向变形。
上弹性构件150的内框架151和外框架152中的至少一者可以设置有电连接至骨架110的线圈120以及印刷电路板170中的至少一者的至少一个端子单元。
如图10中示例性示出的,下弹性构件160可以具有形成在外框架162中的插入凹部162a或孔以及形成在内框架161中的多个第三通孔161a或凹部。
插入凹部162a或孔与形成在壳体140的下表面处的下框架支承凸台147接合,并且第三通孔161a或凹部与如下所述的形成在骨架110的下表面处的下支承凸台114接合。也就是说,外框架162利用插入凹部162a或孔固定并联接至壳体140,并且内框架161利用第三通孔161a或凹部固定并联接至骨架110。
连接部163将内框架161与外框架162连接至彼此,使得内框架161能够在规定范围内相对于外框架162沿第一方向变形。
如图10中示例性示出的,下弹性构件160可以包括彼此分离的第一下弹性构件160a和第二下弹性构件160b。通过这种二分式构型,下弹性构件160的第一下弹性构件160a和第二下弹性构件160b可以接收不同极性的电力或者不同幅值的电力。也就是说,在内框架161和外框架162分别联接至骨架110和壳体140之后,在包绕骨架110的线圈120的两端处以及在内框架161的对应位置处设置有焊球。通过在焊球处实施载流连接、例如实施焊接,内框架161和外框架162可以接收不同极性的电力或不同幅值的电力。另外,第一下弹性构件160a可以电连接至线圈120的端部中的一个端部,并且第二下弹性构件160b可以电连接至线圈120的另一端部,从而从外部源接收电流和/或电压。
上弹性构件150、下弹性构件160、骨架110以及壳体140可以例如利用热熔合和/或粘合剂经由结合来彼此组装。此时,根据组装顺序,可以顺序地实施热熔合固定和粘合剂粘结以完成固定操作。
在替代性实施方式中,上弹性构件150可以具有二分式构型并且下弹性构件160可以具有一体式构型。
下弹性构件160的内框架161和外框架162中的至少一者可以设置有电连接至线圈120和印刷电路板170中的至少一者的至少一个端子单元。
阻尼器用作吸收在镜头移动装置的自动对焦期间产生的在光轴方向上的振动的减振器。阻尼器位于固定体与可动体之间,固定体在镜头移动装置的自动对焦期间固定在初始位置而不移动,可动体构造成在镜头移动装置的自动对焦期间沿光轴方向移动。固定体可以例如为罩构件、壳体或基部,并且可动体可以例如为骨架或镜头。
如下文将进行描述的,阻尼器可以位于骨架与壳体之间。
此时,骨架和壳体包括阻尼连接部以限定用于接纳阻尼器的接纳空间或者用于阻尼器的附接的附接区域。也就是说,阻尼连接部由骨架的一部分以及壳体的一部分构成。
下文将参照附图更加详细地描述根据本发明的阻尼器和阻尼连接部。
图11为示出了根据该实施方式的骨架110的示意性立体图,图12为示出了根据该实施方式的骨架110的示意性仰视立体图,图13为示出了根据该实施方式的骨架110的示意性分解立体图,图14为图13的局部放大立体图,图15为图13的局部放大仰视图,图16为示出了根据实施方式的接纳凹部117的示意性局部放大立体图,以及图17为示出了该根据实施方式的骨架110的示意性纵向截面图。
如图11至图17中示例性示出的,骨架110可以安装在壳体140的内部空间中以沿光轴方向往复运动。如下所述的线圈120可以固定至骨架110的外周表面以与壳体140的驱动磁体130以电磁的方式相互作用。因此,骨架110可以经由线圈120与驱动磁体130的电磁相互作用沿第一方向往复运动。另外,骨架110可以由上弹性构件150和下弹性构件160柔性地(或弹性地)支承并且沿作为光轴方向的第一方向移动以执行自动对焦。
尽管未被示出,骨架110可以包括接纳至少一个镜头的镜筒(未示出)。然而,镜筒仅为镜头移动装置的构成元件并且可能并非为必要的构成元件。镜筒可以以各种方式联接在骨架110内。例如,可以在骨架110的内周表面处形成内螺纹,并且可以在镜筒的外周表面处形成与内螺纹对应的外螺纹,使得镜筒可以经由螺纹接合固定至骨架110。然而,该实施方式不限于此。代替在骨架110的内周表面处形成螺纹,镜筒可以经由除螺纹接合以外的各种其他方法直接固定在骨架110内,替代性地,一片镜头可以与不具有镜筒的骨架110一体地形成。联接至镜筒的镜头可以为一片镜头,或者两片或更多片镜头可以构成光学系统。
另外,可以从骨架110的上表面和下表面突出多个上支承凸台113和多个下支承凸台114。
如图11中示例性示出的,上支承凸台113可以具有圆柱形或棱柱形形状并且用于将上弹性构件150的内框架151联接并固定至骨架110。根据本实施方式,上弹性构件150的内框架151可以在与上支承凸台113对应的位置处形成有第二通孔151a或凹部。此时,上支承凸台113和第二通孔151a或凹部可以经由热熔合固定至彼此、或者可以利用诸如环氧树脂之类的粘合构件固定至彼此。另外,可以设置有多个上支承凸台。此时,上支承凸台可以彼此间隔开合适的距离以防止与附近的构成元件相干涉。也就是说,上支承凸台可以关于骨架110的中心对称地设置以使上支承凸台彼此间隔开恒定的距离。替代性地,上支承凸台可以关于穿过骨架110的中心的特定的假想线对称地设置,但是上支承凸台可以不彼此间隔开恒定的距离。
如图12中示例性示出的,下支承凸台114可以具有圆柱形或棱柱形形状并且用于将下弹性构件160的内框架161联接并固定至骨架110。根据本实施方式,下弹性构件160的内框架161可以在与下支承凸台114对应的位置处形成有第三通孔161a或凹部。此时,下支承凸台114和第三通孔161a或凹部可以经由热熔合固定至彼此、或者可以利用诸如环氧树脂之类的粘合构件固定至彼此。另外,如图12中所示,可以设置有多个下支承凸台114。此时,下支承凸台114可以彼此间隔开合适的距离以防止与附近的构成元件相干涉。也就是说,下支承凸台114可以关于骨架110的中心对称地设置以使下支承凸台114彼此间隔开恒定的距离。
另外,骨架110在其上表面和下表面处形成有上避开凹部112,并且在与上弹性构件150的连接部153以及下弹性构件160的连接部163对应的位置处形成有下避开凹部118。
通过上避开凹部112和下避开凹部118的设置,当骨架110相对于壳体140沿第一方向移动时,在连接部153和163与骨架110之间不存在空间干涉,并且连接部153和163可能更加容易地弹性变形。另外,尽管上避开凹部如在实施方式中那样可以位于壳体140的拐角处,但是上避开凹部也可以根据弹性构件的连接部的形状和/或位置而位于壳体的侧表面处。
另外,尽管骨架110的外周表面可以设置有用于线圈120的安装的线圈坐置凹部116,但是也可以仅设置坐置部。
尽管线圈120可以呈插入并联接至骨架110的外周表面、线圈坐置凹部116或者坐置部的环状线圈组的形式,但是该实施方式不限于此,并且线圈120可以直接包绕骨架110的外周表面、线圈坐置凹部116或坐置部。
根据本实施方式,如图13中示例性示出的,线圈120可以具有近似八边形形状。该形状与骨架110的外周表面的形状对应,并且骨架110也可以具有八边形形状。另外,线圈120的至少四个侧部可以为线性侧部,并且连接线性侧部的拐角可以为圆形的或者线性地形成。此时,线圈120的线性侧部可以与驱动磁体130对应。另外,驱动磁体130的与线圈120对应的表面可以具有与线圈120相同的曲率。也就是说,当线圈120具有线性形状时,驱动磁体130的对应的表面可以平坦地形成。当线圈120具有弯曲形状时,驱动磁体130的对应的表面可以是弯曲的并且具有相同的曲率。另外,即使线圈120是弯曲的,驱动磁体130的对应表面也可以为平坦表面,并且即使线圈120具有线性形状,驱动磁体130的对应表面也可以是弯曲的。
线圈120用于使骨架110沿光轴方向移动以执行自动对焦。线圈120可以在接收到电流时经由与驱动磁体130电磁相互作用来产生电磁力,并且所产生的电磁力可以使骨架110移动。
同时,线圈120可以构造成与驱动磁体130对应。在驱动磁体130如所示出的那样构造为一个整体以使得驱动磁体130的面向线圈120的整个表面具有相同的极性时,线圈120可以构造成使得第一线圈120的与驱动磁体130对应的表面部分具有相同的极性。另一方面,尽管未被示出,但是在每个驱动磁体130被平分在垂直于光轴的平面中以使得驱动磁体130的面向线圈120的表面被分成两个或更多个部段的情况下,线圈120也可以被分成在数量方面与驱动磁体130划分出的部段相等的多个部分。
骨架110包括感测磁体190,感测磁体190与如上所述的壳体140的位置感测器180一起包括在位移感测单元中。感测磁体190固定或联接至骨架100或者设置在骨架110处。以此方式,感测磁体190在骨架110沿第一方向移动时可以沿第一方向移动与骨架110相同的位移。另外,感测磁体190可以构造成一个整体并且设置成使得骨架110的顶部为N极并且骨架110的底部为S极。然而,该实施方式不限于此,并且感测磁体190可以以其他方式构造。另外,感测磁体190可以被平分在垂直于光轴的平面中。
此处,如图13至图17中示例性示出的,骨架110在其外周表面处可以设置有用于接纳感测磁体190的接纳凹部117。
接纳凹部117可以从骨架110的外周表面向骨架110内凹进规定的深度。
具体地,接纳凹部117形成在骨架110的一侧中,使得接纳凹部117的至少一部分位于线圈120内。另外,接纳凹部117的至少一部分向骨架110内凹进比线圈坐置凹部116的深度更大的规定深度。由于接纳凹部117向骨架110内凹进,因此感测磁体190可以接纳在骨架110中。因此,可以提高骨架110的空间利用率,这是因为不必为感测磁体190提供单独的安装空间。
特别地,接纳凹部117位于与壳体140的位置传感器180的位置对应的位置(或者与位置传感器180相对的位置)处。以此方式,感测磁体190与位置传感器180之间的距离包括线圈120的厚度以及线圈120与位置传感器180之间的距离或者线圈120与感测磁体190之间的距离,并且感测磁体190与位置传感器180之间的距离可以具有最小值,这可以增强位置传感器180的磁力感测精确度。
接纳凹部117具有形成在骨架110的下表面和上表面中的一者中以与接纳凹部117连通的开口119。例如,如图17中示例性示出的,骨架110的下表面的一部分可以敞开以形成开口119,并且开口119可以限定接纳凹部117的入口。感测磁体190可以穿过开口119插入、布置或固定或者可以通过开口119而分开。
更具体地,如图15至图17中示例性示出的,接纳凹部117可以包括用于支承感测磁体190的一个表面的内表面以及从该内表面向内凹进规定深度以允许粘合剂被注入到其中的粘合凹部117b。
接纳凹部117的内表面为朝向骨架110的中心向内定向的表面。在感测磁体190成形为立方体的情况下,感测磁体190的宽表面与接纳凹部117的内表面接触或者坐置在该内表面上。
粘合凹部117b可以形成为内表面的朝向骨架110的中心向骨架110内更深地凹进的部分。粘合凹部117b可以从开口119形成至骨架110的内表面——该内表面与感测磁体190的一个表面接触,或者感测磁体190的一个表面坐置或设置在该内表面上。
如图17中示例性示出的,粘合凹部117b设置有第一附加凹部117c,并且第一附加凹部117c在骨架110的竖向厚度方向上比感测磁体190更长。也就是说,第一附加凹部117c为粘合凹部117b的比骨架110的与感测磁体190的后表面接触或者感测磁体190的后表面所坐置或设置在其上的一个内表面更深地凹进的延伸部。通过第一附加凹部117c的设置,当粘合剂穿过开口119被注入粘合凹部117b中时,粘合剂开始填入第一附加凹部117c中,从而填入粘合凹部117b中。因此,可以防止粘合剂溢出粘合凹部117b并沿着感测磁体190与接纳凹部117之间的间隙移动至线圈120,这可以减小镜头移动装置100在感测磁体190的联接期间的缺陷率。
另外,粘合凹部117b还设置有具有在从开口119至骨架110的中心的向内方向上的规定深度的第二附加凹部117a。也就是说,第二附加凹部117a沿朝向骨架110的中心的向内方向比内表面更深地形成在开口119的附近。第二附加凹部117a与粘合凹部117b连通。换句话说,第二附加凹部117a为粘合凹部117b的延伸部。通过第二附加凹部117a的设置,粘合剂可以穿过该第二附加凹部117a被注入粘合凹部117b中。因此,可以防止粘合剂在开口119附近溢出并粘合至骨架110的诸如线圈120之类的其他部件,这可以减小镜头移动装置100在感测磁体190的联接期间的缺陷率。
在替代性实施方式中,第二附加凹部117a可以单独地形成在骨架110中而不具有粘合凹部117b。在这种情况下,骨架110与感测磁体190可以在粘合剂被注入第二附加凹部117a时联接并固定至彼此。
粘合凹部117b可以包括第一附加凹部117c和第二附加凹部117a中的至少一者。也就是说,粘合凹部117b可以包括仅第一附加凹部117c或仅第二附加凹部117a。
在替代性实施方式中,接纳凹部的支承感测磁体的一个表面(即宽表面)的内表面与接纳凹部的被线圈所包绕的外周表面(即线圈坐置凹部表面)之间的深度可以等于或小于感测磁体的厚度。以此方式,感测磁体可以在线圈在其缠绕期间向感测磁体向内施加压力时固定在接纳凹部中。在这种情况下,粘合剂是非必要的。
在另外的实施方式中,尽管在附图中未被示出,但是骨架110还可以包括在骨架110的外周表面中形成在关于骨架110的中心与接纳凹部117对称的相对位置处的附加接纳凹部117以及接纳在该附加接纳凹部117中的重量平衡构件。
也就是说,附加接纳凹部117形成在骨架110的外周表面中并且沿骨架110的向内方向在关于骨架110的中心与接纳凹部117线性地对称的相对位置处延伸了规定深度。另外,重量平衡构件固定至附加接纳凹部117并联接在附加接纳凹部117中,并且具有与感测磁体190相同的重量。
通过附加接纳凹部117和重量平衡构件的设置,可以对骨架110的因接纳凹部117和感测磁体190的设置引起的水平重量不平衡进行补偿。
附加接纳凹部117可以包括粘合凹部117b、第一附加凹部117c和第二附加接纳凹部117a中的至少一者。
图18为示出了根据该实施方式的骨架110和壳体140的仰视图,
图19为示出了根据一个实施方式的骨架110、壳体140以及罩构件300的示意性纵向截面图,图20为示出了根据另一实施方式的骨架110、壳体140以及罩构件300的示意性纵向截面图,以及图21为示出了根据再一实施方式的骨架110和罩构件300的示意性纵向截面图。
如图18中示意性地示出的,在壳体140与骨架110之间设置有阻尼器410。然而,本实施方式不限于此,并且阻尼器410可以根据如上所述的本实施方式设置在镜头移动装置100的移动体与固定体之间。
阻尼器410用于使经由驱动磁体130与线圈120之间的电磁相互作用引起的在第一方向(即光轴方向)上的振动衰减。
阻尼器410位于骨架110与壳体140两者处以允许骨架110能够在规定的范围内相对于壳体140沿第一方向移动。
为此,阻尼器410由可进行光固化的树脂形成。具体地,阻尼器410可以由UV可固化树脂形成,并且更具体地,可以由UV可固化硅形成。
阻尼器以半固化凝胶状态设置以允许骨架110能够在规定范围内沿光轴方向移动而非完全紧固至壳体140。
此处,为了实施阻尼器410的半固化,骨架110与壳体140之间的空间(即,容置阻尼器410的空间)以及阻尼器410暴露于光线(或UV)一段给定的时间。
另外,阻尼器410设置在壳体140与骨架110之间的多个位置处。在这种情况下,阻尼器410可以沿壳体140和骨架110的周向方向彼此间隔开相同的角度。这用于均匀地吸收因骨架110在镜头移动装置100的自动对焦期间的运动引起的绕骨架110的在光轴方向上的振动,从而防止骨架100在光轴方向上的振动集中在横向方向上。
在设置有偶数个阻尼器410的情况下,阻尼器410可以在骨架110与壳体140之间设置成使得每对阻尼器410彼此相对地设置。
骨架110和壳体140包括阻尼连接部420。换句话说,每个阻尼连接部420均由骨架110的一部分以及壳体140的一部分构成。
阻尼连接部420构造成增大阻尼器410的附接区域以增大阻尼器410的衰减区域。
另外,阻尼连接部420构造成允许阻尼器410安全地接纳或固定在骨架110与壳体140之间。这是因为阻尼器410在受到半固化过程之前为液体状态或半液体状态,并且因此,当阻尼器410被引入到骨架110与壳体140之间时,阻尼器410难以保持在骨架110与壳体140之间的给定位置处。
每个阻尼连接部420均构造成使得骨架110的一部分与壳体140的一部分在镜头移动装置100的平面图中在规定的空间范围内彼此重叠。
具体地,阻尼连接部420包括形成在骨架110和壳体140中的一者处的阻尼突出部421以及形成在另一者中的阻尼接纳凹部423。
也就是说,阻尼突出部421可以形成在骨架110处并且阻尼接纳凹部423可以形成在壳体140中。替代性地,阻尼突出部421可以形成在壳体140处并且阻尼接纳凹部423可以形成在骨架110中。
下文,为了描述清楚,将对阻尼突出部421形成在骨架110处而阻尼接纳凹部423形成在壳体140中的情况进行描述。
在骨架110和壳体140中的一者中的面向骨架110和壳体140中的另一者的位置处形成有多个阻尼突出部421。也就是说,假定骨架110和壳体140具有面向彼此的表面,并且骨架110的面向表面为第一面向表面P1,壳体140的面向表面为第二面向表面P2,如图18至图21中示例性示出的,阻尼突出部421形成在第一面向表面P1处。当然,在阻尼突出部421形成在壳体140处的情况下,阻尼突出部421可以形成在第二面向表面P2处。
阻尼突出部421从骨架110的第一面向表面P1朝向壳体140或第二面向表面P2水平突出了预定长度。每个阻尼突出部421可以大致呈板的形式。
阻尼突出部421具有规定厚度。如下所述,阻尼突出部421的规定厚度小于阻尼接纳凹部423的高度。
在壳体140的第二面向表面P2中,在与阻尼突出部421的位置对应的位置处形成有多个阻尼接纳凹部423。
阻尼接纳凹部423中的每个阻尼接纳凹部均在第二面向表面P2中凹进以接纳阻尼器410和阻尼突出部421的一部分。也就是说,阻尼接纳凹部423沿从壳体140的中心向外的方向在壳体140的第二面向表面P2中凹进。
另外,阻尼接纳凹部423具有规定宽度(即水平的左右长度)和规定高度(即,竖向的上下长度)。此时,阻尼接纳凹部423构造成使得阻尼接纳凹部423的规定宽度大于阻尼突出部421的宽度,并且阻尼接纳凹部423的规定高度大于阻尼突出部421的规定厚度。
以不同的方式对此进行描述,阻尼接纳凹部423和阻尼突出部421分别形成在壳体140和骨架110处,使得壳体140和骨架110的面向彼此的表面彼此间隔开规定的距离。阻尼器410设置在、附接在或者填入到由阻尼接纳凹部423和阻尼突出部421的彼此间隔开了预定距离的面向彼此的表面限定的接纳空间中。
阻尼接纳凹部423具有阶梯部423a,阶梯部423a在壳体140的上部部分或下部部分处由壳体140的内表面定界。例如,在阻尼接纳凹部423形成在壳体140的下部部分中的情况下,阶梯部423a在壳体140的内表面中与壳体140的下表面平行地形成。就相同的对象而言,在阻尼接纳凹部423形成在壳体140的上部部分中的情况下,阶梯部423a在壳体140的内表面中与壳体140的上表面平行地形成。由于阶梯部423a,阻尼器410在半固化过程之前可以保持在壳体140的阻尼接纳凹部423中的给定位置处,并且因此,操作者可以将阻尼器410稳定地保持在所需位置处,这可以有助于阻尼器410的最终成型过程、即半固化过程。
阻尼器410附接至阻尼接纳凹部423或接纳在该阻尼凹部423中,从而以规定的厚度围绕阻尼突出部421的一部分的整个外表面。也就是说,阻尼器410构造成围绕阻尼突出部421的接纳在阻尼接纳凹部423中的一部分的上表面、下表面、前表面以及两个横向表面、阻尼接纳凹部423的阶梯部423a和两个横向表面、以及阻尼接纳凹部423的面向阻尼突出部421的前表面的表面。
如图18中示例性示出的,阻尼器410、阻尼突出部421以及阻尼接纳凹部423位于骨架110和壳体140的面向彼此的表面的拐角处。在这种情况下,驱动磁体130坐置、布置或固定在壳体140的第二面向表面P2处。也就是说,阻尼器410、阻尼突出部421以及阻尼接纳凹部423位于与驱动磁体130所坐置的表面位置不重叠的表面位置处。
图19至图21示出了形成在骨架110和壳体140处的阻尼器410、阻尼突出部421和阻尼接纳凹部423的基于上述部分距离骨架110和壳体140的面向彼此的表面的拐角的高度的位置的各种实施方式。
首先,如图19中示例性示出的,根据一个实施方式,阻尼突出部421形成在骨架110的下部处,并且阻尼接纳凹部423距壳体140的敞开下端(即,阻尼接纳凹部423的开始部分)的高度比阻尼突出部421距该敞开下端的高度更大。
也就是说,阻尼突出部421和阻尼接纳凹部423形成为使得阻尼接纳凹部423的阶梯部423a定位得比阻尼突出部421的上表面高出规定高度。
当镜头移动装置100的组装过程在这样的情形下完成时,壳体140的敞开下端以及阻尼器410通过壳体140以及基部210的联接至骨架110的下端的上表面被密闭地密封。即,阻尼器410由基部210的上表面挡住而不被向外暴露。
因此,由于镜头移动装置100的清洗过程在阻尼器410由基部210挡住而不被向外暴露的状态下实施,因此阻尼器410可以不受清洗液的液压压力影响,这可以可靠地防止由镜头移动装置100的清洗过程引起的阻尼器410的损失或毁坏。
另外,如图20中示例性示出的,根据另一实施方式,阻尼突出部421形成在骨架110的上部处,并且阻尼接纳凹部423距壳体140的敞开上端(即,阻尼接纳凹部423的开始部分)的高度比阻尼突出部421距该敞开上端的高度更小。
即,阻尼突出部421和阻尼接纳凹部423形成为使得阻尼接纳凹部423的阶梯部423a定位得比阻尼突出部421的下表面低规定高度。
当镜头移动装置100的组装过程在这样的情形下完成时,壳体140的敞开上端以及阻尼器410通过壳体140和/或罩构件300的联接至骨架110的上端的顶表面(即,内顶表面)被密闭地密封。即,阻尼器410由罩构件300的上表面挡住而不被向外暴露。
因此,由于镜头移动装置100的清洗过程在阻尼器410由罩构件300挡住而不被向外暴露的状态下实施,因此阻尼器410可以不受清洗液的液压压力的影响,这可以可靠地防止由镜头移动装置100的清洗过程引起的阻尼器410的损失或毁坏。
另外,如图21中示例性示出的,根据另一实施方式,阻尼突出部421在骨架110的第一面向表面P1处形成在骨架110的中间高度处,并且阻尼接纳凹部423距壳体140的敞开下端的高度比阻尼突出部421距该敞开下端的高度更大。
此时,设置在骨架110处的驱动线圈120可以缠绕在阻尼突出部421的上侧和下侧处,以避开阻尼突出部421。
在这种情况下,由于阻尼器410基于骨架110和壳体140的下端而深深地位于骨架110和壳体140中,因此即使镜头移动装置100的清洗过程在壳体140的敞开下端以及阻尼器410没有被基部210密闭地密封的状态下实施,阻尼器410也基本上不受清洗液的液压压力的影响。即,根据本实施方式,即使清洗过程在基部210与壳体140和/或骨架110联接之前实施,也不存在阻尼器410毁坏的风险。
尽管在图中未示出,但是在替代实施方式中,阻尼突出部421可以在骨架110的第一面向表面P1处形成在骨架110的中间高度处,并且阻尼突出部421距壳体140的敞开上端的高度可以比阻尼突出部421距该敞开上端的高度更小。
即便在这种情况下,与上述实施方式类似,即使镜头移动装置100的清洗过程在壳体140的敞开上端以及阻尼器410没有被罩构件300密闭地密封的状态下实施,阻尼器410也基本不受清洗液的液压压力的影响。即,根据本实施方式,即使清洗过程在罩构件300与壳体140和/或骨架110联接之前被实施,也不存在阻尼器410毁坏的风险。
图22为示出了根据另一实施方式的骨架110和壳体140的示意性底侧视图。
如图22中示例性示出的,阻尼突出部421和阻尼接纳凹部423可以形成在骨架110和壳体140的面向彼此的表面处,而不是形成在骨架110和壳体140的面向彼此的表面的拐角处。
在这种情况下,驱动磁体130坐置、布置或固定在壳体140的第二面向表面P2的拐角处。即,阻尼器410、阻尼突出部421以及阻尼接纳凹部423形成在不与驱动磁体130所坐置的表面位置重叠的表面位置处。然而,就驱动磁体130与阻尼器410之间的位置关系而言,本实施方式不限于上述位置。
在本实施方式的情况下,与参照图19至图21的以上描述类似,阻尼器410、阻尼突出部421以及阻尼接纳凹部423可以根据各种实施方式以各种高度形成在骨架110和壳体140的面向彼此的表面处。
图23a为示出了不具有阻尼器410的常规的镜头移动装置100在光轴方向上的振动的曲线图,图23b为示出了根据本实施方式的镜头移动装置100在光轴方向上的振动的曲线图,以及图23c为示出了在阻尼器410被镜头移动装置100的清洗过程损坏的情况下,根据本实施方式的镜头移动装置100在光轴方向上的振动的曲线图。
在未设置用于镜头移动装置100的自动对焦的阻尼器410的情况下,如在图23a中示出的镜头移动装置100的自动对焦期间的振动实验结果的曲线图所示出的,能够确认产生了共振点或共振区段(参见红色圆形标记),在该共振点或共振区段处振幅被最大化。
不同地,根据本实施方式,在设置有用于镜头移动装置100的自动对焦的阻尼器410的情况下,如在图23b中示出的镜头移动装置100的自动对焦期间的振动实验结果的曲线图中所示出的,能够确认消除了在图23a中示出的镜头移动装置100的自动对焦期间的振动实验结果的曲线图所示出的共振点或共振区段。
然而,即使在具有阻尼器410的镜头移动装置的情况下,由清洗液的液压压力引起的每个阻尼器410的部分毁坏或全部毁坏可能会在清洗过程期间频繁地发生。因此,如在图23c中示出的镜头移动装置100的自动对焦期间的振动实验结果的曲线图所示出的,能够确认再次产生了共振点或共振区段(参见红色圆形标记),在该共振点或共振区段处振幅被最大化。
在本实施方式中,为了防止由于阻尼器410的因清洗过程引起的损失或毁坏而产生共振点或共振区段,如上所述,设置有用于安全接收、布置或固定阻尼器410的阻尼连接部420,并且阻尼连接部420定位成使得阻尼器410由基部210和/或罩构件300密闭地密封,以便在清洗过程期间不被向外暴露。
如上所述,在本实施方式中,阻尼器插置在骨架与壳体之间,从而使在自动对焦的执行期间骨架在光轴方向上的振动衰减。以这种方式,本实施方式可以防止镜头移动装置在自动对焦的执行期间在光轴方向上的共振。因此,本实施方式可以防止将骨架和壳体连接至彼此的上弹性构件和/或下弹性构件的损坏或破坏。
另外,通过设置阻尼连接部以增加骨架与壳体之间的阻尼器附接区域,本实施方式可以增加阻尼器的衰减区域,从而在自动对焦的执行期间更高效地消除共振并且提高骨架与壳体之间的阻尼器附接安全性。
另外,通过将阻尼器设置在骨架与壳体之间,本实施方式可以防止在镜头移动装置的制造中的组装的镜头移动装置的清洗过程期间阻尼器被向外暴露,并且因此,可以在清洗过程期间防止由清洗液的液压压力引起的每个阻尼器的部分或全部毁坏。
另外,摄像头模块可以通过将镜头联接至镜头移动装置并且在镜头移动装置下方设置图像传感器和印刷电路板——图像传感器设置在该印刷电路板上——来构造。镜头移动装置的基部和其上设置有图像传感器的印刷电路板可以彼此联接。
图24为示出了根据一个实施方式的阻尼器410和阻尼连接部420的示意性局部放大立体图,图25为示出了根据实施方式的阻尼器410和阻尼连接部420的示意性局部放大平面图,以及图26为示出了根据实施方式的阻尼器410和阻尼连接部420沿着图25的线A-A截取的示意性局部放大纵向截面图。
阻尼器410可以位于上弹性构件和下弹性构件之中的至少一个弹性构件的内框架151或161与壳体140之间的多个位置处。
即,如图24至图26中示例性示出的,阻尼器410可以位于上弹性构件的内框架151与壳体140之间。替代性地,尽管在图中未示出,但是阻尼器410可以位于下弹性构件的内框架161与壳体140之间。替代性地,阻尼器410可以位于上弹性构件的内框架151与壳体140之间以及位于下弹性构件的内框架161与壳体140之间。
下文中,为了避免重复描述,如图中所示出的,以下描述可以基于阻尼器410位于上弹性构件的内框架151与壳体140之间的情况。
阻尼器410可以用于通过驱动磁体130与线圈120之间的电磁相互作用使沿第一方向(即,光轴方向)的振动衰减。
阻尼器410可以设置在骨架110和壳体140处,以允许骨架110相对于壳体140在规定范围内沿第一方向可移动。
为此,阻尼器410可以由能够光固化的树脂形成。具体地,阻尼器410可以由UV可固化树脂形成,并且更特别地,可以由UV可固化硅或阻尼硅或阻尼构件形成。
阻尼器410可以以半固化凝胶状态提供,以允许骨架110在规定范围内沿光轴方向可移动而不是完全地紧固至壳体140。
此处,为了执行阻尼器410的半固化,内框架151与壳体140之间的空间(即,容置阻尼器410的空间)以及阻尼器410暴露于光(或紫外线)或热一段给定的时间。
另外,阻尼器410可以设置在壳体140与内框架151之间。在这种情况下,阻尼器410可以在壳体140和内框架151的周向方向上相互间隔开相同的角度。这用于均匀地吸收在镜头移动装置100的自动对焦期间由骨架110的移动引起的围绕骨架110的在光轴方向上的振动,从而防止骨架110在光轴方向上的振动集中在横向方向上。
在设置有偶数个阻尼器410的情况下,阻尼器410可以以成对的方式设置在内框架151与壳体140之间,或者阻尼器410可以设置成使得每对阻尼器410面向彼此。
内框架151和壳体140可以包括阻尼连接部420。换言之,每个阻尼连接部420可以由内框架151的一部分和壳体140的一部分构成。
阻尼连接部420可以为用于阻尼器410的接纳空间定界。另外,阻尼连接部420可以构造成增加阻尼器410的附接区域,以增加阻尼器410的衰减区域。
另外,阻尼连接部420可以构造成允许阻尼器410安全地接纳或固定在内框架151与壳体140之间。这是由于阻尼器410在经历半固化过程之前处于液态或半液态,并且因此当阻尼器410被引入内框架151与壳体140之间时,阻尼器410难以保持在内框架151与壳体140之间的给定位置处。
阻尼连接部420可以构造成使得内框架151的一部分以及壳体140的一部分在镜头移动装置100的平面图中在规定的空间范围内彼此重叠。
具体地,每个阻尼连接部420包括形成在内框架151处的阻尼突出部421和形成在壳体140中的阻尼接纳凹部423。
阻尼突出部421和阻尼接纳凹部423可以布置成在内框架151与壳体140之间彼此面向。
阻尼突出部421可以形成在内框架151的面向壳体140的表面处。具体地,假定上弹性构件的内框架151以及壳体140具有面向彼此的表面,并且内框架151的面向表面为第一面向表面,壳体140的面向表面为第二面向表面,则如图24至图27中示例性示出的,阻尼突出部421可以从第一面向表面沿向外方向(即,朝向壳体140的内表面)水平地延伸规定长度。
阻尼突出部421通常可采用板的形式。
阻尼突出部421可以具有规定厚度。阻尼突出部421的规定厚度可以等于上弹性构件的厚度。
另外,阻尼突出部421可以在与上弹性构件的水平面相同的水平面中延伸。
阻尼突出部421的一部分可以位于阻尼接纳凹部423中。此时,阻尼突出部421的一部分的下表面可以定位得比阻尼接纳凹部423的底部部分423a高规定高度。
另外,根据本实施方式,阻尼突出部421可以具有至少一个穿孔421a。该穿孔421a可以在阻尼突出部421的厚度方向上穿孔。此处,穿孔421a可以用于增大阻尼器410的位于阻尼突出部421下方的部分的暴露区域。通过设置穿孔421a,能够显著地减少用于使阻尼器410进入半固化凝胶状态的半固化过程所需的时间,并且因此,能够减少镜头移动装置的整个制造时间。
此时,根据本实施方式,如图24中示例性示出的,穿孔421a可以被切开,以向外打开阻尼突出部421的自由端的一部分。此时,优选地,切开的穿孔421a可以具有半圆形形状。然而,这以示例的方式给出并且本实施方式不限于该形状。
另外,根据本实施方式,阻尼突出部421可以具有从阻尼突出部421的自由端沿相反方向延伸的横向延伸部421b。该横向延伸部421b可以朝向阻尼接纳凹部423的两个侧表面水平地延伸。
此时,横向延伸部421b可以布置成使得横向延伸部421b和阻尼接纳凹部423或者如下所述的横向隔板430的面向表面可以彼此间隔开。
外框架152可以在与阻尼接纳凹部423的位置对应的位置处具有向外弯曲部或向外切开部425。这用于消除阻尼突出部421的一部分与外框架152之间的空间干涉,因为内框架151的阻尼突出部421和外框架152需要位于相同的水平面中并且阻尼突出部421的一部分需要被接纳在阻尼接纳凹部423中。
多个阻尼接纳凹部423可以在壳体140的第二面向表面中形成在与阻尼突出部421的位置对应的位置处。
每个阻尼接纳凹部423可以被凹进在第二面向表面中,以便接纳阻尼突出部421的一部分以及阻尼器410。即,阻尼接纳凹部423可以沿从壳体140的中心向外的方向被凹进在壳体140的第二面向表面中。
通过如上所述的阻尼接纳凹部423的设置,当在经历半固化过程之前向内框架151与壳体140之间填入液态的阻尼器410时,可以使阻尼器410的位置稳定并且可以调节用作阻尼器410的材料的量,以使该材料的量与阻尼接纳凹部423的容积对应,这可以使用作阻尼器410的材料的量最小化。
另外,阻尼接纳凹部423具有规定宽度(即,水平方向上的左右长度)和规定高度或深度(即,竖直方向上的上下长度)。此时,阻尼接纳凹部423构造成使得阻尼接纳凹部423的规定宽度比阻尼突出部421的宽度更大并且阻尼接纳凹部423的规定高度比阻尼突出部421的规定厚度更大。
即,阻尼接纳凹部423可以在与阻尼突出部421的位置对应的位置处以距离壳体140的上表面规定深度的方式形成在壳体140中。
以不同的方式对此进行描述,阻尼接纳凹部423和阻尼突出部421形成在上弹性构件和壳体140处,使得上弹性构件和壳体140的面向彼此的表面彼此间隔开规定距离。阻尼器410定位、附接或填入在由上弹性构件和壳体140的彼此间隔开规定距离的面向彼此的表面限定的接纳空间中。
阻尼接纳凹部423可以具有由壳体140的内表面限定的底部部分423a。例如,在阻尼接纳凹部423形成在壳体140的下部中的情况下,底部部分423a可以形成为与壳体140的内表面中的壳体140的下表面平行。就相同的对象而言,在阻尼接纳凹部423形成在壳体140的上部中的情况下,底部部分423a可以形成为与壳体140的内表面中的壳体140的上表面平行。由于底部部分423a,阻尼器410在半固化过程之前可以保持在壳体140的阻尼接纳凹部423中的给定位置处,并且因此,操作者可以将阻尼器410稳定地保持在期望的位置处,这可以有助于阻尼器410的最终成型过程,即,半固化过程。
此处,根据本实施方式,如图24中示例性示出的,阻尼接纳凹部423的底部部分423a可以向下倾斜。此时,底部部分423a的两侧可以绕作为最下点的阶梯部423a的中心轴线以相等的角度倾斜地凹进。通过该形状,当阻尼器410被填入或引入阻尼接纳凹部423中时,足够量的阻尼器410可以填入阻尼突出部421的中心下方的需要集中衰减的区域中,并且同时地,即使阻尼器410尚未经历半固化过程,阻尼器410仍可以更稳定地保持在给定位置处。另外,如上所述,穿孔421a可以形成在阻尼突出部421的自由端中。因此,即使穿孔421a下方(即,在阻尼接纳凹部423的中心轴线上方)的阻尼器410的量被增大,阻尼器410仍可以通过穿孔421a暴露于光下,这确保了整个阻尼器410的均匀的半固化。
另外,阻尼器410可以附接至阻尼接纳凹部423或接纳在阻尼接纳凹部423中,以便以规定厚度围绕阻尼突出部421的一部分的整个外表面。即,阻尼器410可以构造成围绕阻尼突出部421的接纳在阻尼接纳凹部423中的一部分的上表面、下表面、前表面和两个横向表面、阻尼接纳凹部423的底部部分423a和两个横向表面、以及阻尼接纳凹部423的面向阻尼突出部421的前表面的表面。
另外,壳体140可以包括横向隔板430,该横向隔板430形成在阻尼接纳凹部423的两个横向侧处,以从壳体140的上表面正交地突出。通过设置横向隔板430,当阻尼器410被引入或填入阻尼接纳凹部423中时,能够防止阻尼器410溢出阻尼接纳凹部423的两个横向侧并且移动至镜头移动装置100中的其他部件。
下文中,将对与阻尼突出部421的各种形状相关的另外的实施方式进行详细地描述。
图27为示出了根据第一另外实施方式的阻尼突出部421的示意性局部放大平面图,图28为示出了根据第二另外实施方式的阻尼突出部421的示意性局部放大平面图,图29为示出了根据第三另外实施方式的阻尼突出部421的示意性局部放大平面图,以及图30为示出了根据第四另外实施方式的阻尼突出部421的示意性局部放大平面图。
如上所述的穿孔421a和横向延伸部421b在下面将分别用作指定对应的部件的术语。
如图27中示例性示出的,根据第一另外实施方式,阻尼突出部421可以包括单个穿孔421a以及从其自由端沿相反方向延伸的横向延伸部421b。
此处,穿孔421a可以采用形成在阻尼突出部421中的封闭的穿孔的形式。例如,穿孔421a可以是形成在阻尼突出部421中的圆形穿孔。
如图28中示例性示出的,根据第二另外实施方式,阻尼突出部421可以包括多个穿孔421a以及从其自由端沿相反方向延伸的横向延伸部421b。
此处,穿孔421a可以具有比根据第一另外实施方式的穿孔421a更小的直径并且穿孔421可以形成在阻尼突出部421中的多个位置处。另外,穿孔421a可以采用形成在阻尼突出部421中的封闭的穿孔的形式。例如,穿孔421a可以是形成在阻尼突出部421中的圆形穿孔。
通过根据第二另外实施方式的该构型,可以增大阻尼器410的位于阻尼突出部421下方的部分的暴露区域,这可以导致阻尼器410的半固化过程所需的曝光时间的显著减少。
在替代实施方式中,穿孔421a中的一些穿孔可以是形成在阻尼突出部421中的圆形穿孔,并且穿孔421a中的一些穿孔可以是形成在阻尼突出部421的自由端中的半圆形穿孔。
另外,横向延伸部421b中的每个横向延伸部可以具有至少一个穿孔421a。以这种方式,可以进一步增大阻尼器410的位于阻尼突出部421下方的部分的暴露区域。
当然,如图30和图31中所示出的,形成在横向延伸部421b中的穿孔421a可以另外地形成在阻尼突出部421中。
如图29和图30中示例性示出的,根据第三另外实施方式和第四另外实施方式,阻尼突出部421可以具有单个穿孔421a。此时,在本实施方式中,阻尼突出部421不包括横向延伸部421b。
另外,如图29中示出的根据第三另外实施方式的穿孔421a可以是形成在阻尼突出部421中的封闭的穿孔。此时,封闭的穿孔可以具有圆形形状。
如图30中示出的根据第四另外实施方式的穿孔421a可以通过切开阻尼突出部421的自由端的一部分而形成,从而向外敞开。此时,切开的穿孔可以具有半圆形形状。
图31为示出了根据另一实施方式的阻尼接纳凹部423的示意性纵向截面图。
根据如图31中示出的实施方式的阻尼接纳凹部423可以包括根据上述实施方式的阻尼接纳凹部423的所有构成元件和技术特征。
如图31中示例性示出的,根据本实施方式的阻尼接纳凹部423可以包括内隔板423c,该内隔板423c形成在第二面向表面附近,以从阻尼接纳凹部423的底部部分423a竖向地突出规定高度。
此时,内隔板423c的规定高度可以比阻尼突出部421的下表面与底部部分423a之间的高度更小。这起到了通过骨架110在第一方向上的弹性往复运动来消除阻尼突出部421与内隔板423c之间的空间干涉的作用,因为当镜头移动装置100执行自动对焦时,骨架110在第一方向上弹性地往复运动。
即,阻尼接纳凹部423可以由底部部分423a、形成在其两个横向侧处的横向隔板430、壳体140的内表面、以及内隔板423c限定。
通过设置内隔板423c,当阻尼器410被引入或填入阻尼接纳凹部423中时,能够防止阻尼器410向阻尼接纳凹部423(即,朝向骨架110)内溢流并且移动至镜头移动装置100中的其他部件,从而更稳定地将阻尼器410固定和保持在位。
图32为示出了根据另一实施方式的阻尼器410和阻尼连接部420的示意性平面图和局部放大图。
根据图32的实施方式的阻尼器410和阻尼连接部420可以包括根据上述实施方式的阻尼器410和阻尼连接部420的所有部件和技术特征,不同之处在于位置方面的差异。
如图32中示例性示出的,根据本实施方式的阻尼器410可以位于上弹性构件和下弹性构件之中的至少一个弹性构件的连接部153或163与壳体140之间。
具体地,连接部153或163可以在内框架151或161与外框架152或162之间至少一次地弯曲成给定形状的图案,以便能够在第一方向上弹性变形。连接部可以示意性地或完全地具有下述形状,即:“S”形部重复一次或多次。
根据本实施方式,阻尼连接部420可以设置在与阻尼器410的位置对应的位置处。每个阻尼连接部420可以由上弹性构件的连接部的一部分和壳体140的一部分构成。
具体地,阻尼突出部421可以从具有给定图案的连接部153的外表面朝向壳体140延伸。即,阻尼突出部421可以从经一次或多次弯曲之后弯曲成给定形状的图案的连接部153的最外弯曲部的外表面沿向外方向(即,朝向壳体140)水平地延伸。
阻尼接纳凹部423可以位于与阻尼突出部421对应的位置处。即,阻尼接纳凹部423可以以面向阻尼突出部421的方式位于壳体140处。
阻尼接纳凹部423可以被凹进,以便接纳阻尼突出部421的一部分以及阻尼器410。
根据本实施方式的阻尼突出部421和阻尼接纳凹部423可以包括参照图30和图31根据上述实施方式的阻尼突出部421和阻尼接纳凹部423的所有构成元件和技术特征。
图33a为示出了不具有阻尼器410的常规的镜头移动装置在光轴方向上的振动的曲线图,以及图33b为示出了根据本实施方式的镜头移动装置在光轴方向上的振动的曲线图。
在不具有阻尼器410的用于自动对焦的常规的镜头移动装置100的情况下,如在图33a中示出的镜头移动装置100的自动对焦期间的振动实验结果的曲线图所示出的,能够确认产生了共振点或共振区段(参见红色圆形标记),在该共振点或共振区段处振幅被最大化。
不同地,根据本实施方式,在设置有用于镜头移动装置100的自动对焦的阻尼器410的情况下,如在图33b中示出的镜头移动装置100的自动对焦期间的振动实验结果的曲线图所示出的,能够确认消除了在如图33a中示出的镜头移动装置100的自动对焦期间的振动实验结果的曲线图中所示出的共振点或共振区段。
如上所述,本实施方式可以通过在上弹性构件和下弹性构件之中的至少一个弹性构件与壳体之间设置阻尼器而在执行自动对焦期间使骨架在光轴方向上的振动衰减。以这种方式,本实施方式可以在执行自动对焦期间消除镜头移动装置在光轴方向上的共振。因此,本实施方式可以防止将骨架和壳体连接至彼此的上弹性构件和/或下弹性构件的损坏和破坏。
另外,通过在骨架与壳体之间设置阻尼连接部以增加阻尼器的附接区域,本实施方式可以增加阻尼器的衰减区域,并且因此,可以在执行自动对焦期间更有效地消除共振并且提高骨架与壳体之间的阻尼器的附接稳定性。
另外,摄像头模块还可以包括摄像头模块控制器。该摄像头模块控制器可以将取决于成像目标对象与镜头之间的距离的镜头的焦距与基于由位移传感器感测的电流变化计算出的第一位移值进行比较。下文中,当镜头的第一位移值或当前位置与镜头的焦距不对应时,摄像头模块控制器可以重新调节施加至骨架110的线圈120的电流的量,以使骨架110沿第一方向移动第二位移。在位移传感器中,当固定地联接至作为移动体的骨架110的的感测磁体190沿第一方向移动时,固定地联接至作为固定元件的壳体140的位置传感器180对从感测磁体190发出的磁力的变化进行感测。基于根据所感测的磁力变化输出的电流的量的变化,位移传感器、单独的驱动器IC或摄像头模块控制器可以计算或判断骨架110的当前位置或计算第一位移。当由位移传感器计算或判断的骨架110的当前位置或第一位移被传输至印刷电路板170的控制器时,控制器可以再次确定骨架110的位置以用于自动对焦并且调节待施加至线圈120的电流的量。
第二实施方式
图34为示出了根据另一实施方式的镜头移动装置的立体分解图,图35为示出了根据实施方式的不具有罩构件的镜头移动装置的立体图,图36为示出了根据实施方式的壳体和上弹性构件的视图,图37为图36的侧视截面图,以及图38为示出了在常规的镜头移动装置和根据实施方式的镜头移动装置的移动期间所获得的图形曲线的视图。
参照图34至图37,根据本实施方式的镜头移动装置可以主要包括移动单元100、固定单元200、弹性单元300、阻尼器构件400以及位置感测单元500。
移动单元100可以容置如下所述的镜头或镜头单元10并且移动单元100是可移动的。移动单元100可以包括骨架110和线圈单元120。镜头单元10可以容置在骨架110中。
具体地,骨架110可以联接至如下所述的镜头单元10以便固定镜头单元10。尽管镜头单元10和骨架110可以通过形成在骨架110的内周表面以及镜头单元10的外周表面处的螺纹的螺纹接合而联接至彼此,但镜头单元10和骨架110也可以使用粘合剂以非螺纹接合的方式联接至彼此。当然,镜头单元10和骨架110可以通过螺纹接合更牢固地联接至彼此并且使用粘合剂附接至彼此。
另外,骨架110的外周表面可以设置有阶梯部111,以引导线圈单元120的缠绕或安装,如下所述。阶梯部111可以连续地形成在骨架110的外周表面处,或者可以形成在骨架110的每个侧表面的中心处,如所示的出。替代性地,阶梯部可以构造成支承线圈单元,以允许预制的线圈绕组装配在骨架110的外周表面的上部或下部周围。
另外,骨架110可以在其上表面和/或下表面处设置有用于联接上弹性构件310和/或下弹性构件320的一个或多个联接凸台112。上弹性构件310和/或下弹性构件320用于在如下所述的基部240的上侧处支承骨架110。
骨架110可以具有第一凹部113,该第一凹部113凹进在骨架110的侧表面中或者由阶梯部111限定。如下所述的感测磁体510位于第一凹部113中。另外,骨架110可以在其上表面处设置有形成在如上所述的上弹性构件310的连接部310c附近的一个或多个突出部114。在平面图中,突出部114可以具有矩形、三角形、圆形或梯形形状,但是不限于此。
第一联接凸台112或突出部114可以等距离地或对称地形成在骨架110的上表面处。在本实施方式中,可以形成四对联接凸台112(每对包括两个联接凸台112)并且四个突出部114可以等距离地或对称地形成。
线圈单元120可以位于骨架110周围。具体地,线圈单元120可以在骨架110的阶梯部111的引导下缠绕在骨架110的外周表面上。作为预制的线圈绕组的线圈单元120可以安装至阶梯部111。
替代性地,四个单独的线圈可以以90度的间隔布置在骨架110的外周表面处。包括四个线圈的线圈单元120可以在接收到从如下所述的印刷电路板(未示出)施加的电力时产生电磁场并且通过与如下所述的磁体单元230相互作用而使骨架110移动。
固定单元200可以包括壳体220、磁体单元230以及基部240并且还可以包括罩构件210。罩构件可以用作壳体。移动单元100可以通过固定单元200的磁体单元与移动单元100的线圈单元之间的相互作用而被移动。
壳体220可以从骨架110向外间隔开规定距离。另外,壳体220可以不是单独地设置,而是与罩构件210一体地形成,如下所述。替代性地,镜头移动装置的外观可以仅由单独的罩构件来限定。
在本实施方式中,壳体220可以由基部240支承并且壳体220构造成在其中接纳骨架110。壳体220可以采用与罩构件210的形状对应的立方体的形式并且壳体220可以具有敞开的顶侧和底侧,以支承移动单元100。
壳体220可以在其侧表面处设置有具有与如下所述的磁体对应的形状的磁体联接孔口221或磁体联接凹部。磁体联接孔口221可以形成在壳体220中,在数量上与如下所述的磁体相等。如下所述,根据本实施方式的磁体联接孔口221或磁体联接凹部考虑到感测磁体510可以形成在如所示出的壳体220的两个相对的侧表面中,但是磁体联接孔口221或磁体联接凹部也可以形成在壳体220的全部四个侧表面中。
另外,壳体220可以由绝缘材料形成并且考虑到生产率可以是注塑成型制品。
壳体220可以在其上表面处设置有彼此间隔开规定距离的至少两个止挡件222。止挡件222可以从壳体220的上表面突出以吸收外部冲击。止挡件222可以与壳体220一体地形成、可以形成在骨架110处或者可以被省去。
另外,壳体220可以在其上表面和/或下表面处设置有一个或多个第二联接凸台223。第二联接凸台223可以插入如下所述的上弹性构件310或下弹性构件320的外部部分310a的第二联接孔310aa中。例如,四个第二联接凸台223可以等距离地形成在对称或不对称的位置处。
壳体220可以具有固定凸台224,该固定凸台224如下所述可以从壳体220突出,以定位在厚度减小部310ab的两端处,用于对形成在上弹性构件310的外部部分310a处的厚度减小部310ab进行固定。
参照图37,壳体220可以在其上表面处设置有一个或多个接纳凹部225,在所述一个或多个接纳凹部中,如下所述的阻尼器构件400以规定高度填入。例如,四个接纳凹部225可以等距离地布置在对称或不对称的位置处。此处,接纳凹部225可以如图所示地形成在壳体220的每侧的中心中,或者可以形成在壳体220的每个拐角处。
另外,壳体220可以在其一个侧表面处设置有位置传感器孔227或第二凹部(未示出),如下所述的位置传感器520位于该位置传感器孔227或第二凹部中。考虑到基板530与位置传感器520之间的安装关系,位置传感器520可以如图所示地安装在形成在侧表面中的位置传感器孔227中。位置传感器可以是霍尔传感器。
另外,壳体220可以在其外表面的每个拐角的下端处形成有联接凹部226,如下所述的基部240的联接突出部241可以坐置在该联接凹部226中。联接突出部241和联接凹部226可以有助于壳体220和基部240的便利组装并且实现强大的固定力。
壳体220可以从罩构件210间隔开给定距离,或者可以与罩构件210接合。骨架110可以通过线圈单元120与磁体单元230的相互作用在光轴方向上移动。
磁体单元230可以例如使用粘合剂以与线圈单元120相对的方式安装至壳体220或罩构件210。磁体单元230可以包括装配到形成在壳体220中的磁体联接孔口221中的两个或四个磁体,这确保了壳体220的内部容积的高效利用。
替代性地,磁体单元230的两个或四个磁体可以以与线圈单元120相对的方式附接至壳体220的两个或四个内侧表面。
尽管磁体单元230的磁体可以具有如示出的长方体形状,但是实施方式不限于此并且磁体可以具有多边柱形。
基部240可以构造成允许壳体220固定至其上表面。具体地,基部240可以如下所述地联接至罩构件210,以便封闭移动单元100和壳体220。
如下所述,在基部240的中心处形成有通孔242并且该通孔242与镜头单元10对应。另外,基部240可以具有中央圆形凹部243以允许骨架110与基部240间隔开。
另外,基部240可以具有从其上拐角突出的一个或多个联接突出部241,以与壳体220的联接凹部226进行表面接触或插入壳体220的联接凹部226中。联接突出部241可以有助于壳体220和基部240的便利联接并且在联接之后实现坚固的固定。
基部240可以在其一个侧表面处形成有坐置凹部244,在该坐置凹部244中坐置有如下所述的基板530的端子单元531。坐置凹部244可以凹进在基部240的至少一个侧表面中。另外,坐置凹部244可以如下所述地相对于罩构件210的内表面以直角或锐角形成,以与端子单元531的布置角对应。
基部240可以用作传感器保持器,以保护如下所述的图像传感器(未示出),并且滤光器(未示出)可以安装至基部240。在这种情况下,滤光器可以安装在基部240的中心通孔附近并且可以包括红外滤光器或蓝色滤光器。
此处,滤光器例如可以由薄膜材料或玻璃材料形成。例如,红外截止涂层材料可以以平板、例如用于保护图像表面的盖玻片的形式设置在滤光器上。
在滤光器安装在镜头的外侧处的情况下,滤光器可以不单独地设置并且镜头表面可以被涂覆以用于进行红外截止。
同时,根据实施方式的镜头移动装置还可以包括弹性单元300。
弹性单元300可以包括上弹性构件310和下弹性构件320,上弹性构件310和下弹性构件320连接至骨架110和壳体220,从而为移动单元100提供返回力。尽管上弹性构件310和下弹性构件320中的每一者可以由设置在壳体220的相应侧处的单独的弹性构件构成,但是就生产效率而言,每个弹性构件可以采用通过弯曲或切割单个板而形成的片簧的形式。
上弹性构件310设置在骨架110和壳体220的上端上以支承骨架110,并且上弹性构件310用于在骨架110向上移动时为骨架110提供返回力。
上弹性构件310包括:紧固至壳体220的外部部分310a、紧固至骨架110的内部部分310b、以及将内部部分310b与外部部分310a连接至彼此的连接部310c。此处,每个连接部310c可以是至少一个弯曲部。
为了联接上弹性构件310,壳体220可以在其上表面处设置有第二联接凸台223,并且外部部分310a可以形成有与第二联接凸台223对应的第二联接孔310aa以用于联接第二联接凸台223。
另一方面,为了联接上弹性构件310,骨架110可以在其上表面处设置有第一联接凸台112,并且内部部分310b可以形成有与第一联接凸台112对应的第一联接孔310ba。联接凸台与联接孔之间的联接可以通过热熔合、粘结或焊接来实现。
另外,上弹性构件310的内部部分310b可以形成有减振部310bb,该减振部310bb延伸至外部部分310a并且接纳在相应的接纳凹部225中。尽管减振部310bb可以具有弯曲的形状,但是实施方式不限于该形状,并且减振部310bb可以具有任何其他形状,只要减振部310bb可以从内部部分310b延伸以接纳在接纳凹部225中即可。每个减振部310bb的自由端可以与接纳凹部225的底表面间隔开规定距离。在这种情况下,自由端的部分可以弹性地接纳在阻尼器构件400中,如下所述。
外部部分310a可以具有厚度减小部310ab以防止与从内部部分310b延伸的减振部310b干涉。厚度减小部310ab如上所述可以由壳体220的固定凸台224支承。
该实施方式可以包括位置感测单元500。该位置感测单元500可以主要包括感测磁体510、位置传感器520以及基板530。位置传感器可以是霍尔传感器。基板530可以实施为位于壳体220的外表面与罩构件210之间的柔性印刷电路板,并且基板530可以包括用于与外部电源连接的端子单元531。
在这种情况下,端子单元531可以向下,即,朝向基部延伸,用于与如下所述的单独的印刷电路板焊接。
另外,基板530可以电连接至线圈单元120的两个远端,以将电力施加至线圈单元120。
位置传感器520可以安装至基板530。具体地,位置传感器520可以以与感测磁体510相对的方式位于壳体220处,用于对位于骨架110处的感测磁体510的磁场的强度和相位进行感测,并且位置传感器520可以引起自动对焦以用于快速和精确控制骨架110。
考虑到镜头移动装置的尺寸的减小,尽管位置传感器520可以位于形成在壳体220中的位置传感器孔227中,但是实施方式不限于此并且位置传感器520的安装可以在没有孔的情况下执行。另外,感测磁体510可以位于形成在骨架110中的第一凹部113中,并且基板530的形成有端子单元531的一部分可以定位在基部240的坐置凹部244中。
位置传感器520可以位于与感测磁体510的同一条线中。为了对沿着与光轴方向对应的Z轴线的位移进行感测,感测磁体510可以与磁体单元230单独地安装至骨架110的外表面,用于驱动移动单元100。根据需要,感测磁体510可以用作磁体单元。
另一方面,与图示不同地,位置传感器520可以在线圈单元120内侧设置在骨架110处。在这种情况下,位置传感器520可以由线圈单元120挡住以免从外侧看到。另外,位置传感器520可以位于线圈单元120的外侧处。
另外,感测磁体或位置传感器可以在线圈单元上方或下方设置成不与线圈单元重叠。在这种情况下,可以减少线圈的干涉。尽管位置传感器520可以位于比感测磁体510更靠近线圈单元120处,但考虑到在感测磁体510处产生的磁场的强度是线圈处产生的磁场的强度的几百倍,在对感测磁体510的移动进行感测时不考虑线圈单元120的电磁场。
罩构件210可以联接至基部240以便接纳移动单元100、固定单元200和弹性单元300,并且罩构件210可以限定镜头移动装置的外观。如示出的,尽管罩构件210可以为具有上开口211和下开口的长方体形状,但是罩构件210的形状不限于此。
罩构件210的内侧表面可以与基部240的侧部紧密接触,使得罩构件210的底部由基部240封闭。因此,罩构件210可以用于保护内部构成元件免受外部冲击并且用于防止外侧污染物的渗入。
另外,罩构件210可以用于保护摄像头模块的构成元件免受由移动电话等产生的外部无线电波的干扰。因此,罩构件210可以由诸如铁和铝之类的金属材料形成,并且罩构件210可以镀以诸如镍之类的金属以用于防腐蚀。
尽管未示出,但罩构件210的一个表面的与基部240的坐置凹部244对应的部分可以被暴露。暴露的部分如下所述可以有助于容易地焊接端子单元531和印刷电路板并且防止罩构件210因焊接球而短路。另外,在形成于罩构件210的上表面中的开口211的内周处可以形成有向下弯曲的内部轭212。该内部轭可以位于骨架110与线圈单元120之间。
同时,实施方式可以包括位于壳体220与弹性单元300之间和/或位于骨架110与弹性单元300之间的阻尼器构件400。阻尼器构件400可以由溶胶或凝胶型环氧形成并且可以施用在壳体220与弹性单元300之间和/或骨架110与弹性单元300之间以吸收冲击。
具体地,骨架110在光轴方向上移动并且该移动用于对象的自动对焦。上弹性构件310的内部部分310b与骨架110的移动同时地弹性变形,并且上弹性构件310的内部部分310b在其中接纳有镜头单元10的骨架110的移动之后提供返回力。此处,在本实施方式中,由于减振部310bb从内部部分310b延伸,并且减振部310bb的自由端与应用于固定单元200的壳体220的阻尼器构件400间隔开规定距离,所以可以缓解弹性构件的平移。在本实施方式中,为了有效地应用阻尼器构件400,壳体220具有接纳凹部225,阻尼器构件400以阻尼器构件400与接纳凹部225之间具有规定距离的方式填入接纳凹部225中,并且与阻尼器构件400接触的减振部310bb与接纳凹部225的底表面间隔开规定距离。
同时,与以上实施方式(在壳体220与弹性单元300之间)独立地或组合地,在另一实施方式中(在骨架110与弹性单元300之间),为了连接至内部部分310b以缓解与骨架110的运动同时地弹性变形的连接部310c的平移,突出部114可以在靠近连接部310c的位置处形成在移动单元100的骨架110的上表面处,并且阻尼器构件400可以应用于连接部310c与突出部114之间。
通过用于阻尼器构件400的布置的上述结构特征,可以获得图38中示出的实验示例。图38(a)示出了在常规的镜头移动装置中的共振点的产生。图38(b)示出了在根据本实施方式的镜头移动装置的移动时的频率值的曲线图。
如图38(b)的曲线图所示出的,本实施方式可以消除根据相关技术的共振频率的峰值P1和峰值P2,即,如图38(a)的曲线图中示出的共振点P1和共振点P2。
通过调节阻尼器构件400的量或应用面积,本实施方式可以增大共振频率,并且例如,调节后的共振频率可以在50Hz至180Hz的范围内,从而与振动马达的共振频率范围部不重叠。
例如,通过提出用于将阻尼器构件400有效地坐置在弹性构件、移动单元100和/或固定单元200处的结构,本实施方式可以通过防止阻尼器构件400的分离而提高阻尼器构件400的耐久性和可靠性,并且本实施方式可以通过改变频率或共振点的形状在镜头移动装置的驱动方面实现噪音消除、改进的控制稳定性以及振荡消除。应当理解,已关于自动对焦型镜头移动装置描述了实施方式,但实施方式可以应用于光学图像稳定(OIS)型镜头移动装置。
同时,根据实施方式的镜头移动装置可以安装至摄像头模块。摄像头模块可以应用于各种多媒体产品例如移动电话、笔记本电脑、摄像头电话、PDA和智能玩具,并且摄像头模块还可应用于图像输入装置例如监控摄像头或磁带录像机的信息端子。例如,在根据实施方式的镜头移动装置安装至摄像头模块的情况下,尽管摄像头模块未示出,但是还可以进一步提供镜头单元10、印刷电路板和图像传感器。
镜头单元10可以是镜筒,但是不限于此,并且只要镜头单元10可以支承镜头,则镜头单元10可以具有任何其他形状。将基于镜头单元10为镜筒的情况对实施方式进行描述。
镜头单元10在与图像传感器对应的位置处安装在如下所述的印刷电路板上。镜头单元10包括一个或多个镜头。
另外,根据实施方式的摄像头模块还可以包括印刷电路板。印刷电路板在其上表面的中心处可以设置有图像传感器(未示出)以及用于驱动摄像头模块的各种元件(未示出)。
另外,为了施加驱动根据实施方式的镜头移动装置所需的电力,印刷电路板可以连接至端子单元531、上弹性构件310或下弹性构件320,或者印刷电路板可以电连接至线圈单元120。
图像传感器(未示出)可以安装在印刷电路板的上表面的中心处以沿着光轴方向与镜头单元10的镜头对准。图像传感器将与通过镜头接收的对象相关的光信号转换成电信号。
尽管已经参照本发明的多个说明性实施方式对实施方式进行了描述,但是应当理解,本领域的技术人员可以想到将落入本公开的原理的精神和范围内的许多其他改型和实施方式。更具体地,在本公开内容、附图以及所附权利要求的范围内的主题组合结构的组成部件和/或结构方面的各种变型和改型都是可能的。除组成部件和/或结构方面的变型和改型以外,替代性使用对本领域的技术人员而言也将是明显的。
Claims (29)
1.一种镜头移动装置,包括:
壳体;
驱动磁体,所述驱动磁体设置在所述壳体上;
骨架,所述骨架设置在所述壳体中,并且所述骨架构造成沿光轴移动;
线圈,所述线圈设置在所述骨架的外表面上;
上弹性构件,所述上弹性构件设置在所述骨架和所述壳体的上表面上;
下弹性构件,所述下弹性构件设置在所述骨架和所述壳体的下表面上;以及
阻尼器,所述阻尼器设置在所述上弹性构件与所述壳体之间,
其中,所述上弹性构件包括联接至所述骨架的内框架、联接至所述壳体的外框架、以及将所述内框架与所述外框架彼此连接的连接部,
其中,所述上弹性构件包括从所述上弹性构件的所述连接部水平地突出并包括至少一个孔的阻尼突出部,并且
其中,所述阻尼突出部与所述外框架间隔开并且设置在所述外框架与所述内框架之间,
其中,所述阻尼器的至少一部分沿平行于光轴的第一方向设置在所述阻尼突出部与所述壳体之间,
其中,所述至少一个孔沿所述第一方向穿过所述阻尼突出部设置。
2.根据权利要求1所述的镜头移动装置,其中,所述至少一个孔设置在所述外框架与所述内框架之间。
3.根据权利要求1所述的镜头移动装置,其中,所述壳体包括设置在所述阻尼突出部下的阻尼接纳凹部,并且
其中,所述阻尼器附接至所述阻尼突出部和所述阻尼接纳凹部两者。
4.根据权利要求3所述的镜头移动装置,其中,所述阻尼接纳凹部从所述壳体的一个表面凹进以接纳所述阻尼突出部和所述阻尼器的至少任一者的一部分。
5.根据权利要求1所述的镜头移动装置,其中,所述阻尼器设置在所述上弹性构件与所述壳体之间以使得所述骨架能够在规定的范围内相对于所述壳体在所述第一方向上移动。
6.根据权利要求1所述的镜头移动装置,其中,所述阻尼器以凝胶状态设置在所述上弹性构件与所述壳体之间。
7.根据权利要求1所述的镜头移动装置,其中,所述阻尼器包括设置在所述上弹性构件与所述壳体之间的四个阻尼器,并且
其中,所述四个阻尼器中的两个阻尼器设置在关于所述光轴彼此对称的位置处,而另外两个阻尼器设置在关于所述光轴彼此对称的位置处。
8.根据权利要求4所述的镜头移动装置,其中,所述阻尼突出部的至少一部分在所述第一方向上与所述阻尼接纳凹部重叠,
其中,所述阻尼接纳凹部和所述阻尼突出部的面向表面彼此间隔开规定距离,并且
其中,所述阻尼器的至少一部分设置在所述阻尼接纳凹部与所述阻尼突出部的所述面向表面之间的接纳空间中。
9.根据权利要求4所述的镜头移动装置,其中,所述阻尼器围绕所述阻尼突出部的至少一部分并且附接至所述阻尼接纳凹部。
10.根据权利要求1所述的镜头移动装置,其中,所述孔设置有多个孔,并且所述多个孔被构造成增加所述阻尼器的暴露区域。
11.根据权利要求1所述的镜头移动装置,其中,所述阻尼器的至少一部分设置在所述阻尼突出部的所述孔上。
12.根据权利要求1所述的镜头移动装置,包括位移感测单元以确定所述骨架的在所述第一方向上的位移值,
其中,所述位移感测单元包括:
位置传感器,所述位置传感器设置在所述壳体上;以及
感测磁体,所述感测磁体在对应于所述位置传感器的位置处设置在所述骨架上。
13.根据权利要求12所述的镜头移动装置,其中,所述位置传感器包括霍尔传感器。
14.根据权利要求1所述的镜头移动装置,其中,所述连接部的两端部设置在所述外框架与所述内框架之间。
15.根据权利要求1所述的镜头移动装置,其中,所述阻尼突出部设置在所述连接部的一端部与所述连接部的另一端部之间。
16.根据权利要求1所述的镜头移动装置,其中,所述连接部的两端部设置在所述外框架与所述内框架之间,并且
其中,所述阻尼突出部设置在所述连接部的一端部与所述连接部的另一端部之间。
17.根据权利要求3所述的镜头移动装置,其中,所述阻尼突出部与所述内框架间隔开。
18.根据权利要求17所述的镜头移动装置,其中,所述阻尼器的一部分设置在所述阻尼突出部的所述孔上,并且所述阻尼器的另一部分设置在所述阻尼接纳凹部与所述阻尼突出部之间。
19.根据权利要求1所述的镜头移动装置,其中,所述阻尼器构造成减轻所述骨架在所述镜头移动装置的自动对焦或所述镜头的移动期间在所述第一方向的振动。
20.一种镜头移动装置,包括:
壳体,所述壳体包括阻尼接纳凹部;
骨架,所述骨架设置在所述壳体中并且构造成沿着光轴沿第一方向移动;
线圈,所述线圈设置在所述骨架上;
驱动磁体,所述驱动磁体设置成与所述线圈对应;
第一弹性构件,所述第一弹性构件设置在所述骨架和所述壳体上;以及
阻尼器,所述阻尼器附接至所述第一弹性构件和所述壳体,
其中,所述第一弹性构件包括联接至所述骨架的内框架、联接至所述壳体的外框架、将所述内框架和所述外框架连接的连接部以及从所述连接部向外延伸的阻尼突出部,
其中,所述阻尼突出部与所述外框架间隔开,
其中,所述阻尼突出部的至少一部分设置成对应于所述阻尼接纳凹部,并且
其中,所述阻尼器的一部分设置在所述阻尼接纳凹部与所述阻尼突出部之间,
其中,所述阻尼接纳凹部在从顶部观察时设置在所述外框架与所述内框架之间。
21.根据权利要求20所述的镜头移动装置,其中,所述阻尼器附接至所述阻尼接纳凹部和所述阻尼突出部,
其中,所述阻尼突出部从所述连接部水平地突出,
其中,所述第一弹性构件设置在所述骨架和所述壳体的上表面上,并且
其中,所述阻尼接纳凹部从所述壳体的一个表面凹进以接纳所述阻尼突出部和所述阻尼器中的至少任一者的一部分。
22.根据权利要求20所述的镜头移动装置,其中,所述阻尼突出部在从所述顶部观察时设置在所述外框架与所述内框架之间。
23.根据权利要求20所述的镜头移动装置,其中,所述阻尼器在从所述顶部观察时设置在所述外框架与所述内框架之间。
24.根据权利要求20所述的镜头移动装置,其中,所述阻尼器构造成减轻所述骨架在所述镜头移动装置的自动对焦或所述镜头的移动期间在所述第一方向的振动。
25.根据权利要求20所述的镜头移动装置,其中,所述连接部的两端部设置在所述外框架与所述内框架之间。
26.根据权利要求25所述的镜头移动装置,其中,所述阻尼突出部设置在所述连接部的一端部与所述连接部的另一端部之间。
27.根据权利要求20所述的镜头移动装置,其中,沿所述第一方向穿过所述阻尼突出部设置有至少一个孔。
28.一种摄像头模块,包括:
如权利要求1或27中的任一项所述的镜头移动装置;
镜头,所述镜头联接至所述镜头移动装置的所述骨架;
图像传感器,所述图像传感器设置在所述镜头下;以及
印刷电路板,所述图像传感器联接至所述印刷电路板。
29.一种电话,包括:
如权利要求28所述的摄像头模块;以及
控制器,
其中,所述控制器基于所述骨架的当前位置或由所述镜头移动装置的用于确定所述骨架在所述第一方向上的位移值的位移感测单元计算或判断的位移值来调节施加至所述骨架的所述线圈的电流量。
Applications Claiming Priority (7)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020140049273A KR102185688B1 (ko) | 2014-04-24 | 2014-04-24 | 렌즈 구동장치 |
| KR10-2014-0049273 | 2014-04-24 | ||
| KR1020140055362A KR102221597B1 (ko) | 2014-05-09 | 2014-05-09 | 렌즈 구동장치 |
| KR10-2014-0055362 | 2014-05-09 | ||
| KR10-2014-0096577 | 2014-07-29 | ||
| KR1020140096577A KR102189132B1 (ko) | 2014-07-29 | 2014-07-29 | 렌즈구동모터 |
| CN201510202622.7A CN105022203B (zh) | 2014-04-24 | 2015-04-24 | 镜头移动装置 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201510202622.7A Division CN105022203B (zh) | 2014-04-24 | 2015-04-24 | 镜头移动装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN110579924A CN110579924A (zh) | 2019-12-17 |
| CN110579924B true CN110579924B (zh) | 2022-04-15 |
Family
ID=53016473
Family Applications (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201910765102.5A Active CN110579923B (zh) | 2014-04-24 | 2015-04-24 | 镜头移动装置 |
| CN201510202622.7A Active CN105022203B (zh) | 2014-04-24 | 2015-04-24 | 镜头移动装置 |
| CN201910765960.XA Active CN110579924B (zh) | 2014-04-24 | 2015-04-24 | 镜头移动装置 |
Family Applications Before (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201910765102.5A Active CN110579923B (zh) | 2014-04-24 | 2015-04-24 | 镜头移动装置 |
| CN201510202622.7A Active CN105022203B (zh) | 2014-04-24 | 2015-04-24 | 镜头移动装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (4) | US9857555B2 (zh) |
| EP (2) | EP3264161A1 (zh) |
| CN (3) | CN110579923B (zh) |
Families Citing this family (54)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102117107B1 (ko) * | 2013-07-12 | 2020-05-29 | 엘지이노텍 주식회사 | 카메라 모듈 |
| EP3713062A1 (en) * | 2013-12-23 | 2020-09-23 | Lg Innotek Co. Ltd | Lens moving apparatus |
| US9360653B2 (en) * | 2014-05-09 | 2016-06-07 | Lg Innotek Co., Ltd. | Lens moving apparatus |
| KR102296767B1 (ko) | 2014-05-09 | 2021-09-02 | 엘지이노텍 주식회사 | 렌즈 구동장치 |
| KR102296305B1 (ko) * | 2014-06-11 | 2021-09-01 | 엘지이노텍 주식회사 | 렌즈 구동장치 및 이를 구비한 카메라 모듈 |
| JP6353721B2 (ja) * | 2014-06-30 | 2018-07-04 | 日本電産コパル株式会社 | レンズ駆動装置 |
| US9791713B2 (en) | 2014-07-24 | 2017-10-17 | Lg Innotek Co., Ltd. | Lens moving apparatus |
| KR20160045382A (ko) | 2014-10-17 | 2016-04-27 | 엘지이노텍 주식회사 | 렌즈 구동장치 |
| JP6433772B2 (ja) * | 2014-11-28 | 2018-12-05 | 日本電産コパル株式会社 | レンズ駆動装置 |
| CN107407788B (zh) | 2015-02-04 | 2020-12-11 | Lg伊诺特有限公司 | 透镜驱动装置及包括该透镜驱动装置的摄像装置模块 |
| KR102311663B1 (ko) * | 2015-03-18 | 2021-10-13 | 엘지이노텍 주식회사 | 렌즈 구동 장치, 및 이를 포함하는 카메라 모듈 |
| CN113341527B (zh) * | 2016-01-11 | 2023-06-23 | Lg伊诺特有限公司 | 透镜驱动装置、相机模块以及光学装置 |
| CN114355545B (zh) | 2016-01-19 | 2024-04-05 | Lg伊诺特有限公司 | 透镜驱动装置、相机模组及光学设备 |
| CN107040118B (zh) * | 2016-02-04 | 2020-06-05 | 台湾东电化股份有限公司 | 电磁驱动模块及应用该电磁驱动模块的镜头驱动装置 |
| CN116088124A (zh) * | 2016-03-08 | 2023-05-09 | Lg伊诺特有限公司 | 透镜驱动装置以及包括其的摄像机模块和光学仪器 |
| CN109073857B (zh) * | 2016-05-09 | 2021-12-17 | Lg伊诺特有限公司 | 透镜驱动装置、相机模块及光学装置 |
| CN109906407B (zh) * | 2016-09-30 | 2022-08-12 | Lg伊诺特有限公司 | 用于驱动透镜的装置、包括该装置的相机模块和光学仪器 |
| CN106646810B (zh) * | 2016-11-11 | 2024-01-19 | 上海比路电子股份有限公司 | 一种透镜驱动装置 |
| KR102250447B1 (ko) * | 2017-03-15 | 2021-05-11 | 삼성전자주식회사 | 전기물을 포함하는 전자 장치 |
| TWI778061B (zh) * | 2017-05-17 | 2022-09-21 | 台灣東電化股份有限公司 | 驅動機構 |
| CN110998432B (zh) * | 2017-06-30 | 2022-06-07 | Lg伊诺特有限公司 | 镜头驱动装置以及摄像头模块和包括摄像头模块的光学装置 |
| TWI701500B (zh) * | 2017-09-01 | 2020-08-11 | 台灣東電化股份有限公司 | 鏡頭模組 |
| CN115268181A (zh) * | 2017-12-19 | 2022-11-01 | Lg伊诺特有限公司 | 透镜驱动装置及相机模块 |
| USD897405S1 (en) * | 2018-01-12 | 2020-09-29 | Tdk Taiwan Corp. | Driving unit for a camera lens |
| USD902982S1 (en) * | 2018-01-12 | 2020-11-24 | Tdk Taiwan Corp. | Driving unit for a camera lens |
| USD902981S1 (en) * | 2018-01-12 | 2020-11-24 | Tdk Taiwan Corp. | Driving unit for a camera lens |
| USD891504S1 (en) * | 2018-01-12 | 2020-07-28 | Tdk Taiwan Corp. | Driving unit for a camera lens |
| USD908775S1 (en) * | 2018-01-12 | 2021-01-26 | Tdk Taiwan Corp. | Driving unit for a camera lens |
| JP7021434B2 (ja) * | 2018-02-05 | 2022-02-17 | ミツミ電機株式会社 | レンズ駆動装置、カメラモジュール、及びカメラ搭載装置 |
| CN114545707A (zh) * | 2018-02-06 | 2022-05-27 | 三美电机株式会社 | 摄像机用致动器、摄像机模块及摄像机搭载装置 |
| TWI660229B (zh) | 2018-03-08 | 2019-05-21 | 大陽科技股份有限公司 | 鏡頭驅動模組、攝影系統與手機裝置 |
| KR102603709B1 (ko) * | 2018-03-15 | 2023-11-17 | 엘지이노텍 주식회사 | 렌즈 구동 장치 및 이를 포함하는 카메라 모듈 및 광학 기기 |
| TWI655491B (zh) | 2018-04-18 | 2019-04-01 | 大陽科技股份有限公司 | 鏡頭驅動模組、鏡頭驅動模組的製造方法、攝影系統與手機裝置 |
| CN209858825U (zh) * | 2018-05-11 | 2019-12-27 | 台湾东电化股份有限公司 | 光学元件驱动机构 |
| US11796348B2 (en) * | 2018-05-11 | 2023-10-24 | Tdk Taiwan Corp. | Optical driving mechanism |
| CN211206917U (zh) * | 2018-06-22 | 2020-08-07 | 台湾东电化股份有限公司 | 光学元件驱动模块 |
| CN108663769B (zh) * | 2018-06-26 | 2023-10-03 | 惠州萨至德光电科技有限公司 | 透镜驱动装置 |
| TWI664485B (zh) * | 2018-08-07 | 2019-07-01 | 大陽科技股份有限公司 | 相機模組及電子裝置 |
| US11119333B2 (en) * | 2018-09-26 | 2021-09-14 | Apple Inc. | Damper arrangement for actuator damping |
| CN111323885A (zh) * | 2018-12-13 | 2020-06-23 | 新思考电机有限公司 | 透镜驱动装置、照相装置及电子设备 |
| JP6710864B1 (ja) * | 2018-12-20 | 2020-06-17 | エスゼット ディージェイアイ テクノロジー カンパニー リミテッドSz Dji Technology Co.,Ltd | レンズ装置、撮像装置、及び移動体 |
| EP4130836A3 (en) * | 2018-12-27 | 2023-05-24 | Tdk Taiwan Corp. | Optical system |
| TWI698693B (zh) | 2018-12-28 | 2020-07-11 | 大陽科技股份有限公司 | 鏡頭驅動模組及電子裝置 |
| US11513308B2 (en) * | 2019-04-01 | 2022-11-29 | Samsung Electro-Mechanics Co., Ltd. | Camera module |
| CN212379629U (zh) * | 2019-07-26 | 2021-01-19 | 台湾东电化股份有限公司 | 光学元件驱动机构及光学装置 |
| TW202129361A (zh) * | 2019-10-09 | 2021-08-01 | 台灣東電化股份有限公司 | 光學元件驅動機構 |
| KR102356804B1 (ko) * | 2020-04-23 | 2022-01-28 | 삼성전기주식회사 | 카메라 모듈 |
| TWI704385B (zh) | 2020-05-20 | 2020-09-11 | 大陽科技股份有限公司 | 鏡頭驅動模組與電子裝置 |
| KR102520165B1 (ko) * | 2020-09-29 | 2023-04-10 | 자화전자(주) | 카메라용 액추에이터 |
| CN113555992B (zh) * | 2021-07-21 | 2022-06-21 | 上海比路电子股份有限公司 | 一种三轴自动对焦的防抖潜望马达 |
| CN114257725A (zh) * | 2021-11-22 | 2022-03-29 | 昆山联滔电子有限公司 | 摄像结构 |
| CN114217491B (zh) * | 2021-11-29 | 2022-08-09 | 辽宁中蓝光电科技有限公司 | 一种防抖摄像驱动装置 |
| JP7202496B1 (ja) | 2022-06-08 | 2023-01-11 | エーエーシー オプティックス (ナンネイ) カンパニーリミテッド | レンズモジュール、カメラ及び携帯電子機器 |
| CN117376680A (zh) * | 2022-06-28 | 2024-01-09 | 晋城三赢精密电子有限公司 | 防尘件、摄像头模组及电子装置 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102135656A (zh) * | 2010-01-26 | 2011-07-27 | 日本电产三协株式会社 | 透镜驱动装置 |
| CN102955324A (zh) * | 2011-08-24 | 2013-03-06 | 三美电机株式会社 | 透镜架驱动装置、摄像机模块及附带摄像机的便携终端 |
| CN103135312A (zh) * | 2011-12-05 | 2013-06-05 | 三星电机株式会社 | 相机模块 |
| CN103257427A (zh) * | 2012-02-16 | 2013-08-21 | 奥林巴斯映像株式会社 | 摄像装置 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR100616662B1 (ko) * | 2005-01-13 | 2006-08-28 | 삼성전기주식회사 | 진동특성과 내충격성이 향상된 초점조절장치 |
| KR100843403B1 (ko) | 2006-12-19 | 2008-07-03 | 삼성전기주식회사 | 렌즈 이송장치 |
| KR101709640B1 (ko) * | 2009-06-02 | 2017-02-24 | 엘지이노텍 주식회사 | 오토 포커스 카메라 모듈 |
| KR101713329B1 (ko) * | 2010-07-21 | 2017-03-07 | 엘지이노텍 주식회사 | 보이스 코일 모터 |
| JP2012177753A (ja) | 2011-02-25 | 2012-09-13 | Shicoh Engineering Co Ltd | レンズ駆動装置、オートフォーカスカメラ及びカメラ付きモバイル端末装置 |
| JP5512783B2 (ja) | 2011-08-12 | 2014-06-04 | シャープ株式会社 | カメラモジュール |
| JP5849830B2 (ja) | 2012-03-30 | 2016-02-03 | ミツミ電機株式会社 | レンズホルダ駆動装置、カメラモジュール、およびカメラ付き携帯端末 |
| WO2013042865A1 (ko) * | 2011-09-23 | 2013-03-28 | (주)하이소닉 | 소형 카메라모듈의 수직 와이어 완충구조 |
| KR101922087B1 (ko) | 2011-10-31 | 2018-11-27 | 엘지이노텍 주식회사 | 카메라 모듈 |
| JP2014126668A (ja) | 2012-12-26 | 2014-07-07 | Mitsumi Electric Co Ltd | レンズ駆動装置、カメラモジュール、及びカメラ付き携帯端末 |
| TWI464479B (zh) * | 2013-02-08 | 2014-12-11 | Wah Hong Ind Corp | 鏡頭致動裝置 |
-
2015
- 2015-04-15 EP EP17181721.6A patent/EP3264161A1/en active Pending
- 2015-04-15 EP EP15163746.9A patent/EP2937726B1/en active Active
- 2015-04-23 US US14/694,004 patent/US9857555B2/en active Active
- 2015-04-24 CN CN201910765102.5A patent/CN110579923B/zh active Active
- 2015-04-24 CN CN201510202622.7A patent/CN105022203B/zh active Active
- 2015-04-24 CN CN201910765960.XA patent/CN110579924B/zh active Active
-
2017
- 2017-11-30 US US15/827,218 patent/US10663689B2/en active Active
-
2020
- 2020-05-13 US US15/931,120 patent/US11598931B2/en active Active
-
2023
- 2023-01-09 US US18/094,704 patent/US11867972B2/en active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102135656A (zh) * | 2010-01-26 | 2011-07-27 | 日本电产三协株式会社 | 透镜驱动装置 |
| CN102955324A (zh) * | 2011-08-24 | 2013-03-06 | 三美电机株式会社 | 透镜架驱动装置、摄像机模块及附带摄像机的便携终端 |
| CN103135312A (zh) * | 2011-12-05 | 2013-06-05 | 三星电机株式会社 | 相机模块 |
| CN103257427A (zh) * | 2012-02-16 | 2013-08-21 | 奥林巴斯映像株式会社 | 摄像装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US11867972B2 (en) | 2024-01-09 |
| CN110579923A (zh) | 2019-12-17 |
| EP3264161A1 (en) | 2018-01-03 |
| US10663689B2 (en) | 2020-05-26 |
| EP2937726B1 (en) | 2017-08-23 |
| CN110579923B (zh) | 2021-09-21 |
| US20230161132A1 (en) | 2023-05-25 |
| EP2937726A1 (en) | 2015-10-28 |
| US20180095239A1 (en) | 2018-04-05 |
| CN110579924A (zh) | 2019-12-17 |
| CN105022203B (zh) | 2019-09-17 |
| US20150309282A1 (en) | 2015-10-29 |
| US11598931B2 (en) | 2023-03-07 |
| US20200271891A1 (en) | 2020-08-27 |
| CN105022203A (zh) | 2015-11-04 |
| US9857555B2 (en) | 2018-01-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN110579924B (zh) | 镜头移动装置 | |
| CN112198618B (zh) | 透镜移动装置 | |
| CN109917530B (zh) | 镜头移动装置 | |
| US10197762B2 (en) | Lens driving device, camera module and optical apparatus | |
| CN110933271B (zh) | 透镜移动装置 | |
| KR102159746B1 (ko) | 렌즈 구동장치 및 이를 구비한 카메라 모듈 | |
| US20160373000A1 (en) | Lens Driving Motor | |
| KR20240013884A (ko) | 렌즈 구동 장치 및 이를 포함하는 카메라 모듈 | |
| KR102221597B1 (ko) | 렌즈 구동장치 | |
| KR20230106547A (ko) | 렌즈 구동 장치, 카메라 모듈 및 광학기기 | |
| KR102185688B1 (ko) | 렌즈 구동장치 | |
| KR20220024385A (ko) | 렌즈 구동장치 | |
| KR20230093231A (ko) | 렌즈 구동 장치 및 이를 포함하는 카메라 모듈 | |
| KR102326536B1 (ko) | 렌즈 구동 장치 및 이를 포함하는 카메라 모듈 | |
| KR102505840B1 (ko) | 렌즈 구동 장치 및 이를 포함하는 카메라 모듈 | |
| KR102323624B1 (ko) | 렌즈구동모터 | |
| KR102663227B1 (ko) | 렌즈 구동장치 | |
| KR102506545B1 (ko) | 렌즈 구동 장치, 카메라 모듈 및 광학기기 | |
| KR20210023931A (ko) | 렌즈 구동장치 | |
| KR20170068808A (ko) | 렌즈 구동 장치, 카메라 모듈 및 광학기기 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |