CN110466752B - 一种倾转旋翼无人机的控制方法及倾转旋翼无人机 - Google Patents
一种倾转旋翼无人机的控制方法及倾转旋翼无人机 Download PDFInfo
- Publication number
- CN110466752B CN110466752B CN201910727161.3A CN201910727161A CN110466752B CN 110466752 B CN110466752 B CN 110466752B CN 201910727161 A CN201910727161 A CN 201910727161A CN 110466752 B CN110466752 B CN 110466752B
- Authority
- CN
- China
- Prior art keywords
- unmanned aerial
- aerial vehicle
- motor
- power
- angle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C27/00—Rotorcraft; Rotors peculiar thereto
- B64C27/22—Compound rotorcraft, i.e. aircraft using in flight the features of both aeroplane and rotorcraft
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C27/00—Rotorcraft; Rotors peculiar thereto
- B64C27/32—Rotors
- B64C27/46—Blades
- B64C27/473—Constructional features
- B64C27/50—Blades foldable to facilitate stowage of aircraft
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C27/00—Rotorcraft; Rotors peculiar thereto
- B64C27/52—Tilting of rotor bodily relative to fuselage
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C39/00—Aircraft not otherwise provided for
- B64C39/02—Aircraft not otherwise provided for characterised by special use
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64D—EQUIPMENT FOR FITTING IN OR TO AIRCRAFT; FLIGHT SUITS; PARACHUTES; ARRANGEMENT OR MOUNTING OF POWER PLANTS OR PROPULSION TRANSMISSIONS IN AIRCRAFT
- B64D27/00—Arrangement or mounting of power plants in aircraft; Aircraft characterised by the type or position of power plants
- B64D27/02—Aircraft characterised by the type or position of power plants
- B64D27/24—Aircraft characterised by the type or position of power plants using steam or spring force
Landscapes
- Engineering & Computer Science (AREA)
- Aviation & Aerospace Engineering (AREA)
- Mechanical Engineering (AREA)
- Toys (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Abstract
本发明提供了一种倾转旋翼无人机的控制方法及倾转旋翼无人机,该倾转旋翼无人机至少包括:两组动力系统,第一组动力系统包括分别位于机头和机尾的两个动力装置,第二组动力系统包括位于机身两侧的两个动力装置,动力装置包括电机和螺旋桨,该倾转旋翼无人机的控制方法包括:根据用户指令,判断无人机的飞行模式;根据无人机的飞行数据及飞行模式,调整动力装置的电机的转速和/或螺旋桨的角度。本发明的实施例通过综合控制各个动力系统的转速和变倾角控,减小了动力系统的响应时间从而增加了无人机机身的稳定性和可靠性。
Description
技术领域
本发明涉及无人机技术领域,具体涉及一种倾转旋翼无人机的控制方法及倾转旋翼无人机。
背景技术
常见的无人机飞行器多为多旋翼和固定翼结构,其中,多旋翼优点是不受地理位置约束可以实现垂直起降、控制灵活、稳定性较高并且可以保持长时间的悬停,缺点在于飞行速度较低、续航时间较短导致作业范围小。而固定翼相比多旋翼而言飞行时间相对就长了很多,飞行速度也很大,因此兼顾到多旋翼无人机的缺点,但却不具备多旋翼无人机的垂直起降、精准悬停等优点。
随着无人机技术的发展,倾转旋翼无人机这种能够将多旋翼和固定翼无人机的优点进行有限的结合,实现可以垂直起降并保证精准悬停的同时又可以高速巡航。但是,由于倾转旋翼无人机由于体积比较大,机体的惯性较大,因此仅通过传统的电机的转速差来实现垂直起降、悬停时,无人机机身的稳定性和可靠性受到影响。
目前的倾转旋翼无人机在多旋翼工作模式和固定翼工作模式的切换均不理想,例如“4+1”模式的倾转旋翼无人机,采用4套垂直动力装置和一套推力装置,机翼两侧的动力系统变倾角是同步,非单独调整,不够灵活,稳定性欠佳。又例如“2+2”模式的倾转旋翼无人机,这种布局采用在主机翼前后两侧分布4个动力装置,当动力装置与机身水平工作时,螺旋桨会对主机翼产生反作用力,进而为无人机保持机身的稳定增加难度。其他类型的倾转旋翼无人机也都面临无人机飞行时稳定性不佳,控制不够灵活的问题。
所以如何在较短时间内能够调整无人机的姿态,并且又能使得大重量的倾转旋翼无人机保持稳定,实现精准控制,是亟待解决的问题。
发明内容
本发明实施例提供了一种倾转旋翼无人机的控制方法及倾转旋翼无人机,以克服现有技术中的倾转旋翼无人机的控制方法难以在较短时间内调整无人机的姿态的同时保持机身稳定的问题。
本发明实施例提供了一种倾转旋翼无人机的控制方法,所述倾转旋翼无人机至少包括:两组动力系统,第一组动力系统包括分别位于机头和机尾的两个动力装置,第二组动力系统包括位于机身两侧的两个动力装置,所述动力装置包括电机和螺旋桨,所述方法包括:根据用户指令,判断所述无人机的飞行模式;根据所述无人机的飞行数据及飞行模式,调整所述动力装置的电机的转速、和/或所述螺旋桨的角度、或同时调整所述电机的转速和所述螺旋桨的角度,使得所述无人机在所述飞行模式下,完成所述用户指令。
可选地,所述根据用户指令,判断所述倾转旋翼无人机的飞行模式,包括:根据所述用户指令,判断所述无人机是否处于巡航作业阶段;若是,则所述无人机的飞行模式为固定翼模式,以及若否,则所述无人机的飞行模式为多旋翼模式。
可选地,所述固定翼模式是指:所述两组动力系统的螺旋桨的角度均为平行,所述第一组动力系统的电机转动而所述第二组动力系统的电机停止,通过调整所述倾转旋翼无人机的机翼,来完成所述用户指令;其中,所述平行,是指所述螺旋桨旋转产生的力的方向与所述机身与主机翼所在的平面平行,以及所述倾转旋翼无人机的机翼至少包括:主机翼、副翼、以及尾翼。
可选地,所述多旋翼模式是指:当所述无人机处于悬停阶段时,所述两组动力系统的螺旋桨的角度均为垂直,所述两组动力系统的电机均转动;以及当所述无人机处于起降移动阶段时,将所述两组动力系统的螺旋桨的角度在垂直的基础上进行调整、或调整所述动力装置的电机的转速、或同时调整所述螺旋桨的角度和所述电机的转速,来完成所述用户指令;其中,所述垂直,指的是所述螺旋桨旋转产生的力的方向与所述机身与所述主机翼所在的平面垂直。
可选地,所述无人机的飞行数据包括:所述动力装置的电机的转速和螺旋桨的角度,以及所述倾转旋翼无人机的姿态角。
可选地,所述根据所述无人机的飞行数据,调整所述动力装置的电机的转速、和/或所述螺旋桨的角度、或同时调整所述电机的转速和所述螺旋桨的角度,使得所述无人机在所述飞行模式下,完成所述用户指令包括:判断所述姿态角是否满足预设的变倾角条件;若是,则调整所述螺旋桨的角度,或同时调整所述螺旋桨的角度和所述电机的转速达到转速差,以完成所述用户指令;若否,则仅调整所述电机的转速达到转速差,以完成所述用户指令。
可选地,所述根据所述无人机的飞行数据,调整所述动力装置的电机的转速和所述螺旋桨的角度,使得所述无人机在所述飞行模式下,完成所述用户指令,包括:根据所述无人机的飞行数据,对各个所述动力装置的电机的转速和/或所述螺旋桨的角度进行独立地调整,使得所述无人机在所述飞行模式下,完成所述用户指令。
本发明实施例还提供了一种倾转旋翼无人机,包括:机体,所述机体包括,机身、设于所述机身的两侧的主机翼、以及分别设于机身前后端的机头和机尾;两组动力系统,第一组动力系统包括分别位于所述机头的动力装置和所述机尾的动力装置,第二组动力系统包括位于所述机身一侧的动力装置和另一侧的动力装置,其中,所述动力装置中的每一个包括电机和螺旋桨,所述动力装置中的每一个用于,通过调整所述电机的转速来改变所产生力的大小,通过调整所述螺旋桨的角度来改变所产生力的方向;以及控制系统,所述控制系统设于机体内部,包括存储器和处理器,所述处理器通过执行所述存储器中存储的计算机指令,从而执行本发明另一实施例及其任意一种可选实施方式中所述的倾转旋翼无人机控制方法。
可选地,所述机体还包括:设于主机翼两侧的副翼和设于机尾的尾翼。
可选地,所述动力装置和所述动力装置设于机体上,位于所述主机翼的后方。
本发明技术方案,具有如下优点:
1.本发明实施例提供了一种倾转旋翼无人机的控制方法,通过综合控制各个动力系统的转速和变倾角,在无人机需要快速改变飞行阶段时,减小了机体受到自身惯性的影响,减小了动力系统的响应时间,增加了无人机飞行过程中的稳定性和灵活度。
2.本发明实施例提供了一种倾转旋翼无人机,该无人机具有特殊的动力系统布局,使得该无人机能够通过综合控制各个动力系统的转速和变倾角,实现快速改变倾转旋翼无人机的飞行阶段,并且减小了倾转旋翼与固定翼之间的相互影响,削弱了大质量无人机自身惯性较大的、姿态不易改变的影响,减小了动力系统的响应时间,增加了无人机机身的稳定性和灵活度。
附图说明
为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
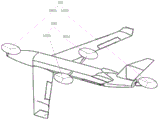
图1A为本发明实施例中倾转旋翼无人机的结构图;
图1B为本发明实施例中倾转旋翼无人机在固定翼模式下的状态示意图;
图1C为本发明实施例中倾转旋翼无人机在多旋翼模式下的状态示意图;
图2为本发明实施例中倾转旋翼无人机的控制方法的流程图;
图3为本发明实施例中倾转旋翼无人机的控制系统的示意图。
具体实施方式
下面将结合附图对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,还可以是两个元件内部的连通,可以是无线连接,也可以是有线连接。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
此外,下面所描述的本发明不同实施方式中所涉及的技术特征只要彼此之间未构成冲突就可以相互结合。
实施例1
图1A示出了本发明实施例提供的一种倾转旋翼无人机的结构图。倾转旋翼无人机包括:机体101,设于机体101上的两组动力系统102和103,以及设于机体101内部的控制系统104(未示出)。
具体地,机体101包括,机身1011、设于机身1011的两侧的主机翼1012、以及分别设于机身1011前后端的机头1013和机尾1014;
两组动力系统,第一组动力系统102包括分别位于机头1013的动力装置1021和机尾1014的动力装置1022,第二组动力系统103包括位于机身1011一侧的动力装置1023和另一侧的动力装置1024,其中,动力装置1021-1024中的每一个包括电机和螺旋桨,动力装置1021-1024中的每一个用于,通过调整电机的转速来改变所产生力的大小,通过调整螺旋桨的角度来改变所产生力的方向;以及
控制系统104,控制系统104设于机体101内部,包括存储器和处理器,处理器通过执行存储器中存储的计算机指令,用于控制无人机的飞行。
在本发明的一个实施例中,倾转旋翼无人机的动力系统的各个动力装置的电机的转速和螺旋桨的角度是相互独立进行调整的。这种单独调整使得无人机的动力装置更加灵活,对于用户指令的响应更加快速。无论是通过变倾角的方式改变力的方向还是通过电机转速差的方式改变无人机的受力来改变无人机的飞行状态,都达到更加稳定和灵活地控制无人机的飞行。
在本发明的一个实施例中,机体101还包括:设于主机翼1012两侧的副翼1015和设于机尾1014的尾翼1016。
在本发明的一个实施例中,动力装置1023和动力装置1024设于机体101上,位于主机翼1012的后方。
在本发明的一个实施例中,倾转旋翼无人机有两种飞行模式:多旋翼模式和固定翼模式。当倾转旋翼无人机处于上升、下降或悬停阶段的时候,无人机在多旋翼模式下工作。当倾转旋翼无人机处于巡航作业阶段的时候,无人机在固定翼模式下工作。
其中,固定翼模式下的无人机状态如图1B所示。在固定翼模式下,两组动力系统102和103的螺旋桨的角度均为平行,第一组动力系统102的两个动力装置1021、1022的电机转动,而第二组动力系统103的两个动力装置1023、1024的电机停止,通过调整倾转旋翼无人机的主机翼1012、两侧的副翼1015以及尾翼1016,来完成用户指令,即巡航任务。其中,这里说的平行,指的是螺旋桨旋转产生力的方向与机身1011与主机翼1012所在的平面平行。巡航作业阶段,无人机在垂直方向上的受力满足Y-G≥0,其中,Y是机翼的升力(Y正比于升力系数、机翼面积、无人机速度、大气密度等),G是无人机自身重力。因此,动力系统102的螺旋桨产生水平的推力和拉力,使得无人机在巡航作业阶段,垂直方向上仅靠机翼提供向上的力;动力系统103的螺旋桨垂下收起,这种布局使得垂直方向上受螺旋桨的影响尽可能小。
其中,多旋翼模式下的无人机状态如图1C所示。多旋翼模式下无人机的状态在以下内容进行详细描述:
1、悬停阶段,两组动力系统102和103的全部动力装置的螺旋桨的角度均为垂直。其中,这里说的垂直,是指螺旋桨旋转产生的力的方向与机身1011与主机翼1012所在的平面相垂直。此时,例如,两套动力系统102和103的四个动力装置1021-1024的工作方式与现有技术中旋翼无人机的旋翼工作方式和工作原理相同。
2、升降移动阶段,两组动力系统102和103的全部动力装置1021-1024的螺旋桨的角度在垂直的基础上进行调整,或调整动力装置1021-1024的电机的转速达到转速差,或同时调整螺旋桨的角度和电机的转速,来完成关于起降和移动的用户指令。
在本发明的一个实施例中,无人机控制系统104根据用户指令,判断无人机的飞行模式。
其中,控制系统104用于判断用户指令是否指示无人机进入巡航作业阶段,若是,则判断无人机的飞行模式为固定翼模式;若否,则判断无人机的飞行模式为多旋翼模式。
其中,用户指令从用户控制终端发出由无人机接收端接收并将相关数据发送给控制系统104。
在本发明的一个实施例中,控制系统104用于根据无人机的飞行数据,调整动力装置1021-1024的电机的转速和螺旋桨的角度,使得无人机在飞行模式下,完成用户指令。
其中,无人机的飞行数据包括:动力装置1021-1024的电机的转速和螺旋桨的角度,以及倾转旋翼无人机的姿态角。
其中,无人机的姿态角由控制系统104中的惯性测量单元(IMU)来获取。
在本发明的一个实施例中,控制系统104用于根据无人机的飞行数据,调整动力装置的电机的转速和螺旋桨的角度,使得无人机在飞行模式下,完成用户指令,包括:判断姿态角是否满足预设的变倾角条件;若是,则调整螺旋桨的角度,或同时调整螺旋桨的角度和电机的转速达到转速差,以完成用户指令;若否,则仅调整电机的转速达到转速差,以完成用户指令。
其中,预设的变倾角条件是无人机姿态角的预设条件,如果满足该条件,则采用变倾角的方式,即改变螺旋桨的角度的方式来改变无人机状态;如果不满足该条件,则无需使用改变螺旋桨的角度的方式,而是仅通过变差速的方式来改变无人机的状态。例如,如果满足预设的变倾角条件是姿态角的俯仰轴(pitch)大于10°,则当检测到无人机姿态角在俯仰轴大于10°时,就采取调整动力装置的螺旋桨的角度的方法。因为改变螺旋桨的角度会迅速改变力的方向,这可以直接地改变无人机的状态;仅靠改变转速差的方法可以改变不同方向上力的大小,但在无人机自身质量大的情况下,不仅无人机响应的时间长,而且即使在很长的响应时间下也不一定能达到想要的无人机飞行状态的效果,所以本发明提出了调整动力装置1021-1024的各个螺旋桨的角度的方式,或者同时调整螺旋桨的角度和电机的转速两者结合的方式,来更快更平稳地做出响应。
其中,对无人机的各个动力系统的电机转速和螺旋桨角度进行单独调整,保证了各部分的灵活性,使得控制更加方便快速。
其中,可以通过安装在动力装置中的倾转机构来调整螺旋桨的角度。
其中,至于具体如何调整,转速差和变倾角度调整多少,都是由具有计算功能的无人机控制系统104,根据预设的算法进行计算并控制。反之,如果不满足预设的变倾角条件(例如,预设的变倾角条件是俯仰轴大于10°,而检测到无人机姿态角俯仰轴小于10°)时,则仅采取调整动力装置1021-1024的电机的转速的方法,靠转速差就可以实现无人机状态的改变。以上仅为示例,预设的变倾角条件可根据实际情况设定,不限于俯仰轴,也不限于具体角度。
在本发明的又一实施例中,当两种飞行模式相互切换时,具体地,从多旋翼模式进入固定翼模式(例如,正在起降或悬停阶段,要进入巡航作业),或者从固定翼模式进入多旋翼模式(例如,正在巡航阶段时需要起降或悬停),同样需要以上步骤,先根据用户指令,判断无人机的飞行模式;根据无人机的飞行数据,包括预设的姿态角、电机的转速以及螺旋桨的角度,来调整动力装置1021-1024的电机的转速、或螺旋桨的角度、或同时调整电机的转速和螺旋桨的角度,实现飞行模式的切换。
本发明的实施例采用常规的旋翼动力布局方式即“+”布局,为了减少机体的反作用力影响无人机的稳定性,将两个动力系统分别安装在机头与机尾的位置,另外两个动力系统则安装在主机翼的后延。在起降阶段,无人机的四个动力装置均会通过倾转结构调整至垂直,并由飞控系统同时控制四个动力装置的转速以及螺旋桨的角度来实现维持无人机的稳定起降、悬停等工作;而无人机在进入巡航时,则主要依靠机头与机尾的两个动力系统来提供动力,并由主机翼的提供一定的升力,最终实现长航程、高速度的大面积作业。
在本发明的另一实施例中,动力装置1021-1024中的每一个动力装置的电机的转速和螺旋桨的角度是由控制系统104分别单独控制的。
实施例2
图2示出了本发明的实施例的一种倾转旋翼无人机的控制方法。倾转旋翼无人机至少包括:两组动力系统,第一组动力系统包括分别位于机头和机尾的两个动力装置,第二组动力系统包括位于机身两侧的两个动力装置,动力装置包括电机和螺旋桨,方法包括:
步骤S201:根据用户指令,判断无人机的飞行模式;
其中,由无人机上的接收端接收来自控制终端的用户指令。用户指令包括:起飞指令、左右指令、下降指令、悬停指令、巡航指令以及作业指令等。
在本发明的一个实施例中,步骤S201还包括:
步骤S2011:根据用户指令,判断无人机是否处于巡航作业阶段;
若是,则方法进行到步骤S2012:无人机的飞行模式为固定翼模式,若否,则方法进行到步骤S2013:无人机的飞行模式为多旋翼模式。
在本发明的一个实施例中,固定翼模式是指:两组动力系统的螺旋桨的角度均为平行,第一组动力系统的电机转动而第二组动力系统的电机停止,通过调整倾转旋翼无人机的机翼,来完成用户指令;其中,平行,是指螺旋桨旋转产生的力的方向与机身与主机翼所在的平面平行,以及倾转旋翼无人机的机翼至少包括:主机翼、副翼、以及尾翼。
其中,在巡航作业阶段,无人机进入固定翼模式。此时,转动的螺旋桨产生水平的推力和拉力,使得无人机在巡航作业阶段,垂直方向上仅靠无人机的机翼提供向上的力;停止的螺旋桨收起,这种布局使得垂直方向上受螺旋桨的影响尽可能小。在固定翼模式下,倾转旋翼无人机工作状态与固定翼无人机相同。
在本发明的一个实施例中,多旋翼模式是指:当无人机处于悬停阶段时,两组动力系统的螺旋桨的角度均为垂直,两组动力系统的电机均转动;以及当无人机处于起降移动阶段时,根据无人机的飞行数据,将两组动力系统的螺旋桨的角度在垂直的基础上进行调整,或调整动力装置的电机的转速,或同时调整螺旋桨的角度和电机的转速,来完成用户指令;其中,垂直,指的是螺旋桨旋转产生的力的方向与机身与主机翼所在的平面垂直。
步骤S202:根据无人机的飞行数据及飞行模式,调整动力装置的电机的转速和/或螺旋桨的角度;
在本发明的一个实施例中,无人机的飞行数据至少包括:动力装置的电机的转速和螺旋桨的角度,以及倾转旋翼无人机的姿态角。
其中,倾转旋翼无人机的姿态角信息由无人机自身的惯性测量单元(IMU)获得。
其中,无人机在起降移动和悬停的阶段,不仅采用传统的多旋翼通过控制动力系统的转速差来实现稳定飞行,还同步结合了变倾角的方式来实现无人机飞行控制,最终保证了整个无人机可靠、最稳定的飞行。姿态角,用于计算上述的转速差的大小和倾变角的角度,以改变无人机的受力大小和方向。
在本发明的一个实施例中,步骤S202还包括:
S2021:判断姿态角是否满足预设的变倾角条件;
若是,则方法进行到步骤S2022:调整螺旋桨的角度,或同时调整螺旋桨的角度和电机的转速达到转速差,以完成用户指令;
若否,则方法进行到步骤S2023:仅调整电机的转速达到转速差,以完成用户指令。
其中,预设的变倾角条件是无人机姿态角的预设条件,如果满足该条件,则采用变倾角的方式,即改变螺旋桨的角度的方式来改变无人机状态。
例如,如果满足预设的变倾角条件是姿态角的俯仰轴大于10°,则当检测到无人机姿态角在俯仰轴大于10°时,就采取调整动力装置的螺旋桨的角度的方法。因为改变螺旋桨的角度会改变受力方向,这可以最快地改变无人机的状态,如果仅靠改变转速差的方法来改变不同方向上力的大小,在无人机自身质量大的情况下,不仅响应的时间长,而且即使在很长的响应时间下也不一定能达到想要的无人机飞行状态的效果。同样,也可以采取同时调整动力装置的螺旋桨的角度和调整动力装置的电机的转速两者结合的方式,更快更平稳地做出响应。而具体如何调整,转速差和变倾角度调整多少,都是由具有计算功能的无人机控制系统,根据预设算法进行计算,并进行控制的。
反之,如果满足预设的变倾角条件是姿态角俯仰轴大于10°,当检测到无人机姿态角俯仰轴小于10°时,则不满足预设的变倾角条件,就仅采取调整动力装置的电机的转速的方法。这仅仅是示例,预设的变倾角条件可以根据实际情况来设定,不限于俯仰轴,也不限于角度10°。
本发明的一个实施例中,根据无人机的飞行数据,对各个动力装置的电机的转速和/或螺旋桨的角度进行独立地调整,使得无人机在飞行模式下,完成用户指令。
其中,对无人机的各个动力系统的电机转速和螺旋桨角度进行单独调整,保证了各部分的灵活性,使得控制更加方便快速。
本发明的实施例提供的倾转旋翼无人机的控制方法,通过从而通过综合控制各个动力系统的转速和变倾角,在无人机处于起降阶段或悬停阶段时,减小了机体受到自身惯性的影响,减小动力系统的响应时间,增加了无人机机身的稳定性和可靠性,并且可以提高倾转旋翼无人机的控制能力、增强无人机控制系统的灵活性,提高无人机控制系统的机动性,保证控制系统的响应速度,在无人机飞行模式变化时依然能保持很好的稳定性,提高控制系统整体的安全性能。
实施例3
图3示出了本发明的实施例提供的一种倾转旋翼无人机的控制系统104。该倾转旋翼无人机的控制系统104包括:倾转系统1041和飞控系统1042。
其中,倾转系统1041包括存储器和处理器,处理器通过执行存储器中存储的计算机指令,从而用于分别对无人机的各个动力系统进行动力倾角即上述变倾角的单独控制,这样单独控制的优点为可以最大效率的维持无人机的稳定,在起降阶段通过控制动力系统的倾角来实现动力保持平衡,可以实现系统的高效、安全、可靠;而
其中,飞控系统1042包括存储器和处理器,处理器通过执行存储器中存储的计算机指令,从而用于对无人机的各个动力系统的电机的转速进行控制,采用多余度调控设计,从而使得无人机在垂直起降、悬停的时候,不仅仅采用传统的多旋翼通过控制动力系统的转速差来实现稳定飞行,还同步结合了直升机的控制方式即上述变倾角来进一步加强了控制系统的稳定,最终保证了整个系统最可靠、最稳定的飞行。
通过上述各个组成部分的协同合作,本发明实施例的倾转旋翼无人机的控制系统通过根据用户指令,判断无人机的飞行模式;根据无人机的飞行数据,调整动力装置的电机的转速、或螺旋桨的角度、或同时调整电机的转速和螺旋桨的角度,使得无人机在飞行模式下,完成用户指令。从而通过综合控制各个动力系统的转速和变倾角控,在无人机处于起降阶段或悬停阶段时,减小了机体受到自身惯性的影响,提高动力系统的响应时间从而增加了无人机机身的稳定性和可靠性,并且可以提高倾转无人机的控制能力、增强系统的灵活性,提高系统的机动性,保证系统的响应速度,在无人机飞行模式变化时依然能保持很好的稳定性,提高系统整体的安全性能。并且通过本发明实施中对各个动力系统的布局方式,可以减少无人机起降或者悬停时螺旋桨的扰流对机体的影响,从结构布局上保障系统的安全性,在无人机飞行模式变化时依然能保持很好的稳定性,提高无人机整体的安全性能,并且可以尽可能小的减少固定翼机体和多旋翼之间的相互影响,削减机体反作用力对旋翼模式飞行造成的影响,保证了系统的稳定性和可靠性。
显然,上述实施例仅是为清楚地说明所作的举例,而并非对实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。而由此所引伸出的显而易见的变化或变动仍处于本发明创造的保护范围之中。
Claims (8)
1.一种倾转旋翼无人机的控制方法,其特征在于,所述倾转旋翼无人机至少包括:两组动力系统,第一组动力系统包括分别位于机头和机尾的两个动力装置,第二组动力系统包括位于机身两侧的两个动力装置,所述动力装置包括电机和螺旋桨,所述方法包括:
根据用户指令,判断所述无人机的飞行模式;
根据所述无人机的飞行数据及所述飞行模式,调整所述动力装置的电机的转速和/或所述螺旋桨的角度;
所述无人机的飞行数据包括:
所述动力装置的电机的转速和螺旋桨的角度,以及所述倾转旋翼无人机的姿态角;
所述根据所述无人机的飞行数据,调整所述动力装置的电机的转速和/或所述螺旋桨的角度,包括:
判断所述姿态角是否满足预设的变倾角条件;
若是,则调整所述螺旋桨的角度,或同时调整所述螺旋桨的角度和所述电机的转速达到转速差,以完成所述用户指令;
若否,则仅调整所述电机的转速达到转速差,以完成所述用户指令。
2.根据权利要求1所述的方法,其特征在于,所述根据用户指令,判断所述倾转旋翼无人机的飞行模式,包括:
根据所述用户指令,判断所述无人机是否处于巡航作业阶段;
若是,则所述无人机的飞行模式为固定翼模式,以及
若否,则所述无人机的飞行模式为多旋翼模式。
3.根据权利要求2所述的方法,其特征在于,所述固定翼模式是指:
所述两组动力系统的螺旋桨的角度均为平行,所述第一组动力系统的电机转动而所述第二组动力系统的电机停止,通过调整所述倾转旋翼无人机的机翼,来完成所述用户指令;
其中,所述平行,是指所述螺旋桨旋转产生的力的方向与所述机身与主机翼所在的平面平行,以及
所述倾转旋翼无人机的机翼至少包括:主机翼、副翼、以及尾翼。
4.根据权利要求3所述的方法,其特征在于,所述多旋翼模式是指:
当所述无人机处于悬停阶段时,所述两组动力系统的螺旋桨的角度均为垂直,所述两组动力系统的电机均转动;以及
当所述无人机处于起降移动阶段时,将所述两组动力系统的螺旋桨的角度在垂直的基础上进行调整、或调整所述动力装置的电机的转速、或同时调整所述螺旋桨的角度和所述电机的转速,来完成所述用户指令;
其中,所述垂直,指的是所述螺旋桨旋转产生的力的方向与所述机身与所述主机翼所在的平面垂直。
5.根据权利要求1-4中任一项所述的方法,其特征在于,所述根据所述无人机的飞行数据,调整所述动力装置的电机的转速和所述螺旋桨的角度,使得所述无人机在所述飞行模式下,完成所述用户指令,包括:
根据所述无人机的飞行数据,对各个所述动力装置的电机的转速和/或所述螺旋桨的角度进行独立地调整,使得所述无人机在所述飞行模式下,完成所述用户指令。
6.一种倾转旋翼无人机,其特征在于,包括:
机体(101),所述机体(101)包括,机身(1011)、设于所述机身(1011)的两侧的主机翼(1012)、以及分别设于机身(1011)前后端的机头(1013)和机尾(1014);
两组动力系统,第一组动力系统(102)包括分别位于所述机头(1013)的动力装置(1021)和所述机尾(1014)的动力装置(1022),第二组动力系统(103)包括位于所述机身(1011)一侧的动力装置(1023)和另一侧的动力装置(1024),其中,所述动力装置(1021,1022,1023,1024)中的每一个包括电机和螺旋桨,所述动力装置(1021,1022,1023,1024)中的每一个用于,通过调整所述电机的转速来改变所产生力的大小,通过调整所述螺旋桨的角度来改变所产生力的方向;以及
控制系统(104),所述控制系统(104)设于机体(101)内部,包括存储器和处理器,所述处理器通过执行所述存储器中存储的计算机指令,从而执行如权利要求1-5中任一项所述的方法。
7.根据权利要求6所述的倾转旋翼无人机,其特征在于,所述机体(101)还包括:设于主机翼(1012)两侧的副翼(1015)和设于机尾(1014)的尾翼(1016)。
8.根据权利要求6或7所述的倾转旋翼无人机,其特征在于,位于所述机身(1011)一侧的动力装置(1023)和位于所述机身(1011)另一侧的动力装置(1024)设于机体(101)上,位于所述主机翼(1012)的后方。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201910727161.3A CN110466752B (zh) | 2019-08-07 | 2019-08-07 | 一种倾转旋翼无人机的控制方法及倾转旋翼无人机 |
| PCT/CN2020/106859 WO2021023187A1 (zh) | 2019-08-07 | 2020-08-04 | 一种倾转旋翼无人机的控制方法及倾转旋翼无人机 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201910727161.3A CN110466752B (zh) | 2019-08-07 | 2019-08-07 | 一种倾转旋翼无人机的控制方法及倾转旋翼无人机 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN110466752A CN110466752A (zh) | 2019-11-19 |
| CN110466752B true CN110466752B (zh) | 2021-11-26 |
Family
ID=68510330
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201910727161.3A Active CN110466752B (zh) | 2019-08-07 | 2019-08-07 | 一种倾转旋翼无人机的控制方法及倾转旋翼无人机 |
Country Status (2)
| Country | Link |
|---|---|
| CN (1) | CN110466752B (zh) |
| WO (1) | WO2021023187A1 (zh) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110466752B (zh) * | 2019-08-07 | 2021-11-26 | 深圳市道通智能航空技术股份有限公司 | 一种倾转旋翼无人机的控制方法及倾转旋翼无人机 |
| CN112744354B (zh) * | 2021-02-07 | 2022-11-18 | 之江实验室 | 一种分布式倾转多旋翼飞行器的飞行模式控制方法 |
| CN113460297A (zh) * | 2021-07-21 | 2021-10-01 | 成都纵横大鹏无人机科技有限公司 | 一种倾转动力结构及系统、一种飞行器 |
| CN113859518A (zh) * | 2021-10-28 | 2021-12-31 | 南京晓航机器人科技有限公司 | 一种多旋翼无人机及提高速度与续航的方法 |
| CN114194382B (zh) * | 2022-01-21 | 2024-02-27 | 东营航空产业技术研究院 | 一种无人机自动配平装置及方法 |
| CN114537654B (zh) * | 2022-03-22 | 2023-06-16 | 南昌航空大学 | 一种可切换动力的翼身融合倾转三旋翼无人机 |
| CN117342019A (zh) * | 2023-11-13 | 2024-01-05 | 浣江实验室 | 一种变弦长全翼式倾转旋翼太阳能无人机 |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20090101413A (ko) * | 2009-08-21 | 2009-09-28 | 곽상호 | 수직이착륙기 |
| CN103693194B (zh) * | 2013-12-17 | 2015-11-18 | 南京航空航天大学 | 一种可倾转四旋翼飞行器 |
| US20160031554A1 (en) * | 2014-07-30 | 2016-02-04 | Siniger LLC | Control system for an aircraft |
| CN104802985B (zh) * | 2015-04-30 | 2017-01-18 | 数字鹰(泰州)农业科技有限公司 | 变轴向多旋翼飞行器及其飞行姿态调整方法 |
| CN105173075B (zh) * | 2015-09-10 | 2017-09-15 | 南京多零无人机技术有限公司 | 一种混合动力可倾转翼飞机 |
| RU2717119C1 (ru) * | 2016-03-10 | 2020-03-18 | Йоав НЕЦЕР | Конвертоплан |
| CN105905294B (zh) * | 2016-04-25 | 2018-05-01 | 北京中科遥数信息技术有限公司 | 垂直起降固定翼无人机 |
| CN206528631U (zh) * | 2017-02-28 | 2017-09-29 | 上海拓攻机器人有限公司 | 一种多旋翼无人机 |
| CN106828915B (zh) * | 2017-03-15 | 2023-02-28 | 西北工业大学 | 一种倾转螺旋桨可垂直起降的高速飞行器的控制方法 |
| CN107042884A (zh) * | 2017-03-18 | 2017-08-15 | 北京天宇新超航空科技有限公司 | 一种倾转旋翼无人机 |
| WO2018175606A1 (en) * | 2017-03-22 | 2018-09-27 | Dzyne Technologies, Inc. | Vertical takeoff and landing aircraft |
| CN206954510U (zh) * | 2017-06-05 | 2018-02-02 | 深圳市科比特航空科技有限公司 | 一种可垂直起降的固定翼无人机 |
| CN107323653A (zh) * | 2017-08-21 | 2017-11-07 | 山东蜂巢航空科技有限公司 | 一种垂直升降倾转旋翼无人机及其控制方法 |
| US10676188B2 (en) * | 2017-10-04 | 2020-06-09 | Textron Innovations Inc. | Tiltrotor aircraft having a downwardly tiltable aft rotor |
| US10696391B2 (en) * | 2017-11-16 | 2020-06-30 | Textron Innovations Inc. | Extended range quad tiltrotor aircraft |
| CN208070012U (zh) * | 2018-03-21 | 2018-11-09 | 曹蔚萌 | 矢量四旋翼飞行器 |
| CN109263932A (zh) * | 2018-10-30 | 2019-01-25 | 佛山市神风航空科技有限公司 | 一种可垂直升降的多旋翼飞行器 |
| CN109896008B (zh) * | 2019-03-29 | 2022-08-05 | 武汉理工大学 | 一种采用旋翼倾转机构的自适应水空两栖无人机 |
| CN110466752B (zh) * | 2019-08-07 | 2021-11-26 | 深圳市道通智能航空技术股份有限公司 | 一种倾转旋翼无人机的控制方法及倾转旋翼无人机 |
-
2019
- 2019-08-07 CN CN201910727161.3A patent/CN110466752B/zh active Active
-
2020
- 2020-08-04 WO PCT/CN2020/106859 patent/WO2021023187A1/zh not_active Ceased
Also Published As
| Publication number | Publication date |
|---|---|
| CN110466752A (zh) | 2019-11-19 |
| WO2021023187A1 (zh) | 2021-02-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN110466752B (zh) | 一种倾转旋翼无人机的控制方法及倾转旋翼无人机 | |
| US12448123B2 (en) | Electric tiltrotor aircraft | |
| EP3466812B1 (en) | Tiltrotor aircraft having a downwardly tiltable aft rotor | |
| EP3868660A1 (en) | Vertical take-off and landing (vtol) aircraft and related methods | |
| US20190071174A1 (en) | Vertical take off and landing aircraft with four tilting wings and electric motors | |
| WO2024255724A1 (zh) | 一种电动倾转旋翼飞行器及其控制系统 | |
| CN111051196A (zh) | 采用被动机翼倾斜的垂直起降飞行器 | |
| US12312075B2 (en) | Blade pitch coupled to propulsion system tilt | |
| EP4530181A1 (en) | Aircraft, aircraft control method and device, and computer-readable storage medium | |
| US11891167B2 (en) | Teeter flap lock | |
| EP4667357A1 (en) | Vertical take-off and landing aircraft and control method for vertical take-off and landing aircraft | |
| US12164311B1 (en) | Systems and methods for applying a movable notch filter in flight control of EVTOL aircraft | |
| US11840351B2 (en) | Aircraft for self-neutralizing flight | |
| US20260077853A1 (en) | Systems and methods for aircraft load alleviation | |
| US12545401B2 (en) | Systems and methods for propeller thrust protection | |
| US12377999B2 (en) | Systems and methods for vibration attenuation in flight control of an aircraft | |
| KR20250065974A (ko) | 양력 조절 가능한 고정익을 구비하는 멀티로터 드론 | |
| US12486026B1 (en) | Aerodynamic rotor blade strake | |
| US12509216B1 (en) | Aerodynamic rotor blade configurations | |
| EP4620810A1 (en) | Dual-rotor tilt aircraft and flight control method therefor | |
| JP2020175713A (ja) | マルチローター航空機 | |
| EP4620809A1 (en) | Multi-propeller tilting aircraft and flight control method therefor | |
| RU2775027C1 (ru) | Тейлситтер | |
| WO2025042458A2 (en) | Systems and methods for vibration attenuation in flight control of an aircraft | |
| CN115123538A (zh) | 一种倾转旋翼机、倾转旋翼控制系统及系统方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| CB02 | Change of applicant information |
Address after: 518055 Shenzhen, Guangdong, Nanshan District Xili street, No. 1001, Zhiyuan Road, B1 9. Applicant after: Shenzhen daotong intelligent Aviation Technology Co.,Ltd. Address before: 518055 Shenzhen, Guangdong, Nanshan District Xili street, No. 1001, Zhiyuan Road, B1 9. Applicant before: AUTEL ROBOTICS Co.,Ltd. |
|
| CB02 | Change of applicant information | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |