CN1100699C - 运动吸收输送系统 - Google Patents
运动吸收输送系统 Download PDFInfo
- Publication number
- CN1100699C CN1100699C CN98806414A CN98806414A CN1100699C CN 1100699 C CN1100699 C CN 1100699C CN 98806414 A CN98806414 A CN 98806414A CN 98806414 A CN98806414 A CN 98806414A CN 1100699 C CN1100699 C CN 1100699C
- Authority
- CN
- China
- Prior art keywords
- ball
- platform
- gangway
- ship
- ball seat
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images
































Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B27/00—Arrangement of ship-based loading or unloading equipment for cargo or passengers
- B63B27/30—Arrangement of ship-based loading or unloading equipment for transfer at sea between ships or between ships and off-shore structures
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B27/00—Arrangement of ship-based loading or unloading equipment for cargo or passengers
- B63B27/14—Arrangement of ship-based loading or unloading equipment for cargo or passengers of ramps, gangways or outboard ladders ; Pilot lifts
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C23/00—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes
- B66C23/18—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes specially adapted for use in particular purposes
- B66C23/36—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes specially adapted for use in particular purposes mounted on road or rail vehicles; Manually-movable jib-cranes for use in workshops; Floating cranes
- B66C23/52—Floating cranes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B17/00—Vessels parts, details, or accessories, not otherwise provided for
- B63B2017/0072—Seaway compensators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B27/00—Arrangement of ship-based loading or unloading equipment for cargo or passengers
- B63B27/14—Arrangement of ship-based loading or unloading equipment for cargo or passengers of ramps, gangways or outboard ladders ; Pilot lifts
- B63B2027/141—Arrangement of ship-based loading or unloading equipment for cargo or passengers of ramps, gangways or outboard ladders ; Pilot lifts telescopically extendable
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Combustion & Propulsion (AREA)
- Ocean & Marine Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Ship Loading And Unloading (AREA)
- Jib Cranes (AREA)
- Sheets, Magazines, And Separation Thereof (AREA)
- Manipulator (AREA)
- Accommodation For Nursing Or Treatment Tables (AREA)
- Vibration Dampers (AREA)
- Bridges Or Land Bridges (AREA)
- Fire-Extinguishing By Fire Departments, And Fire-Extinguishing Equipment And Control Thereof (AREA)
- Escalators And Moving Walkways (AREA)
- Fluid-Damping Devices (AREA)
- Aiming, Guidance, Guns With A Light Source, Armor, Camouflage, And Targets (AREA)
Abstract
一种运动吸收输送系统(1),它用来在一个浮动船(2)和一个站台(20)例如采油平台之间运输人和/或物体,其中船(2)和站台(20)可相对运动,该系统(1)包括一个吊杆(7),该吊杆(7)设有一个与船(2)连接的铰接头,以及一个长度可变的工作走道(6),该工作走道具有一个与船(2)连接的铰接头,和一个构架(8),该构架将与铰接头相对的吊杆(7,31)和工作走道(6,33)的端部连接在一起。在站台(29)上设有一个球座(19)。在工作走道(6)的外端设有一个球(18),该球适合与站台(20)上的球座(19)接合,因此球/球座连接能够适应在船(2)和站台(20)之间的三个轴向上相对运动。
Description
本发明涉及一种如权利要求1前序部分所述的运动吸收输送系统,它用来在浮动船和站台,例如采油平台之间运输人和/或物体。本发明还涉及在浮动船和站台之间形成可活动连接的方法。
现在有许多不同的装置用来在浮动船和海上平台之间运输人和货物。由于浮动船和平台之间的相对运动,因此,特别需要这些类型的输送系统。以前采用悬挂在起重机吊杆上的吊篮,该吊篮通过配备重物平衡系统的绞车吊起。然而这种可吊起的吊篮意味着在安全性方面有较大的风险,因为船和平台之间的相对运动很容易使吊篮以显著的力冲击船或平台。另一种风险是吊篮在着地时会倾翻,从而使人和/或货物掉落。在平台之间还使用工作走道,因此,在这些平台之间形成刚性连接。然而,当相对运动很剧烈时,这些工作走道不适合在平台和浮动船之间输送人。
已有技术的实例在NO145131,NO151579,NO157255,US3008158,US4011615和US4169296中表示。例如,US4169296表示了在工作走道的外端和平台之间使用球铰。例如NO145131表示了利用下拉钢索将工作走道的外端牵引到平台。然而,这些公开文件都没有提出采用使下拉钢索与球铰相结合的可能。而且所有公知结构的缺点在于工作走道是自支撑。沿工作走道连接结构不可能运输任何显著重量或尺寸的货物。
因此,非常需要一种更安全的输送系统,它能在浮动船和站台之间形成一种安全可活动的连接,与此同时,适合在两个站台之间运输货物。这样,本发明提供一种如权利要求1特征部分所述的运动吸收输送系统。另外,提供一种如权利要求6的特征部分所述的方法。
下面结合附图详细描述本发明,其中:
图1是输送系统整体的侧视图,
图2表示位于船回转柱的输送系统的截面视图,回转柱的一端支撑工作走道,
图3表示输送系统的外端,
图4表示在船上处于不工作位置的输送系统,
图5是在垂直和水平方向上,在平台和船之间距离改变的不同位置的输送系统的侧视图,
图6是在不同位置的输送系统的顶视图,
图7表示使输送系统与平台连接的方法,
图8表示输送系统紧急断开连接的装置,
图9-47表示本发明的另一个可选实施例,它是目前最优的实施例,
图9表示主要部件,
图10a,b和c表示输送系统的内部分,
图11表示铰接吊杆,
图12表示具有构架的吊杆的外端,
图13表示具有联接装置的构架,
图14表示联接装置,
图15a和b表示一个快速分离机构,
图16a,b和c表示一个底座,
图17a和b表示联接装置的详图,
图18a,b和c表示一个支撑座外壳,
图19-34表示输送系统的连接步骤,
图35-38表示一般的断开连接的步骤,
图39-43表示紧急断开连接的步骤,和
图44-47表示工作走道断开连接和收起的步骤。
图1表示本发明的运动吸收输送系统1,它安装在一个船2上。输送系统1主要由设置在船2的甲板4上的一个柱3,一个塔5,一个工作走道6,一个吊杆7和一个构架8组成。
图2详细描述柱3和塔5。塔5可旋转地与柱3连接,这样使塔5相对于柱3旋转至少约360度,该柱3永久地安装在船2的甲板4上。为了实现这种旋转能力,在塔5和柱3之间设置一个传统的转环节9。吊杆7可旋转地安装在塔上的一个接头10内。因此,吊杆7能够在垂直平面内摆动。绞车(未表示)借助钢索11(见图1)与吊杆7连接,从而使吊杆7的外端在该垂直平面内可起重。工作走道6也通过一个接头12与塔5可旋转地连接,因此还使工作走道6可在垂直平面内摆动。
输送系统1的外端如图3所示。构架8与吊杆7和工作走道6的外端连接在一起。构架8包括一个第一支腿13和一个第二支腿14,两个支腿通过一个接头15与吊杆7可旋转地连接。支腿13和14之间限定了一个开口区域16。构架8包围工作走道6,并通过一个接头17与其可旋转地连接。在构架8的下侧设有一个球。球18设计成容纳在一个球座19中,该球座19牢固地安装在例如平台20的甲板上。
在吊杆7和构架8之间还设有一个液压致动器21,该液压致动器21设计成促使构架8相对于吊杆7强制摆动。一个滑动吊车或者移动绞车22设置在吊杆7下侧上的导轨23内,它能够沿着吊杆7从其外端移动到其内端。一个吊钩24借助一个钢索24a与滑动吊车22连接,这样有可能在船2和平台20之间运输货物。由于构架8内的开口空间16,和塔5内的相应的开口空间25,因此,使得滑动吊车和钩24可沿吊杆7在工作走道6上不受阻碍地移动。
工作走道6包括至少两个部件6a和6b,其中一个部件6a可伸缩地容纳在另一个部件6b内。两个部件6a和6b构成一个框架,从而给通道6上的人以全面的保护。工作走道6或者象管道一样完全封闭,或者包含开口。一个进出阶梯26提供从甲板4通过柱3的顶部到工作走道6的通路。在平台一侧,工作走道6的外端与平台甲板非常近,因此,在该侧通常不需要梯子。然而,可以选择在平台甲板上设置一套小型梯,或者,在工作走道6的外端设置可下降的阶梯。
在图4中,所述的输送系统处于未使用状态,此时,吊杆7和工作走道6在船2上摆动到一个静止位置。在未使用状态下,工作走道6有选择地与塔5和构架8分离并卸下,构架8或者可以向内摆动至抵住吊杆7,或者也可以卸下,从而使柱3,塔5和吊杆7用作普通的起重机。
图5表示根据船2相对于平台20的特殊定位,在不同状态下的输送系统。由于球铰,因此,工作走道6和构架8能够绕球铰18,19相对于平台20在三个方向上旋转。在图5a中,工作走道内端的位置比标准位置低1米,而且其与平台的距离比标准位置与平台距离远6.5米。离开平台和朝向平台的移动主要通过工作走道6的伸缩动作完成。在图5b中,工作走道6的内端的位置比标准位置高2.5米,而且其与平台的距离比标准位置与平台距离近5.5米。图5c和5d表示输送系统的两个极限位置,图5c表示船1在距离平台20最远且位于平台20下最低的位置,图5d表示船2在相对于平台20最高且距离最短的位置。在此,船与平台的距离可变化约20米,与此同时,输送系统没有产生过度的变形。从顶部到底部的浪高达到13米,与此同时没有使输送系统扭曲。
图6表示从上方看去的输送系统;在图6a中输送系统处于名义位置,图6b表示四个不同的极限位置。从图6b显然可知,输送系统能够旋转90度以上的扇形角,与此同时不会过度伸长。船还可以相对于平台改变180度的位置。
在图3中,输送系统1的最大转动范围由角度V来表示。
下面参见图7描述在船2和平台20之间提供可活动的连接的方法。在图7a中,工作走道6的外端运动至大致在平台20上的球座19上方的一个位置。为了将球布置在球座上,塔5旋转,而且借助致动器21,构架8摆动至使球位于正确位置。穿过球18内的孔28的钢索27向着平台20下降。或者通过远程控制,或者由平台20上的人手动控制,钢索27可固定在球座19内的容纳装置29中。当固定吊杆7的绞车在恒定压力下投入运转,并且回转电动机和制动器切断,该制动器控制着塔5和构架8的致动器21的转动,此时,绞车启动以便对钢索27施加张力,从而朝着球座19向下牵引球18。一旦球18和球座19接触,支撑吊杆7的绞车松开,使球18停在球座19内,从而通过吊杆7、构架8和工作走道6的重量而下压以顶住球18。
当用于吊杆7的绞车投入运转时,且用于钢索27的绞车松开,直到球18从球座19充分的提升到一定程度,以便钢索27与球座19分离,此时,断开接合的过程与上述相反。接着,吊杆7和工作走道6可在船2上方摆动。
图8表示断开连接的紧急过程。在这种情况下,当在离开平台20的方向上驱动船时,用于吊杆7的绞车同时起动。在工作走道部分6a和6b之间的伸缩连接使工作走道6伸展,直到其到达其端部位置,并且,由于吊杆7提升工作走道6的外端和对工作走道6向外施加力的综合效果,球18与球座19分离。当启动紧急程序时,钢索27和球座19之间的连接断开。
参照图9至47,下面描述具有铰接吊杆的系统。在连接和断开连接期间,铰接吊杆作用在柱上的扭力显著地减小。另外,在运输期间,当吊杆装在甲板上时,具有节省空间的特点。
图9表示该系统的主要部件,它包括一个柱30,一个吊杆31,一个构架32和一个工作走道33。吊杆是双部件结构,它具有一个内部分34和一个外部分35,该内部分34和外部分35通过铰机构36在接头B连接在一起。
图10a-10c表示具有用于吊杆31的悬挂和起重装置37的柱30。如上所述,吊杆铰接,在此只表示了最内部分34。吊杆31由一个始于柱30的顶部的钢索起重系统37提升。吊杆31由柱30内的双轴支撑系统38悬挂。吊杆31在升降时绕横向水平轴A(图10a)旋转,而且能够绕纵轴A1(图10b)自由旋转。
柱30安装在船甲板上的一个支承座上,并且能够绕垂直轴A2(图10c)旋转。回转致动器39安装成与支承座40连接;它们可以断开连接,或者它们可以控制柱30的旋转运动。
图11表示在接头B具有铰机构36的吊杆31。安装在吊杆31顶部的液压缸41控制其弯折,并限制最大摆动。在缸41收缩时,吊杆31伸直,而且其运动机械上受到限制,因此两个吊杆部分34,35的下边形成一条直线。
图12表示吊杆31的外部分35和构架32之间的连接。构架32在轴C处铰接在吊杆部分35上,构架32的转动受液压缸42控制,该液压缸42安装在构架32的顶部43和吊杆31的托架44之间。
图13和14表示具有支承座49和联轴件45的构架32。构架32和联轴件45能够绕水平轴D相互自由摆动,如图14所示,该水平轴D经过两个轴颈轴承46伸展,该轴颈轴承46安装在支承座外壳49上的两个臂48上,轴颈轴承46接入构架32的支腿47。安装在支承座外壳49和联轴件45之间的枢轴承50限定了垂直轴D1,具有支承座外壳49的构架32绕该垂直轴D1旋转。
现在参见图15a和15b,16a-c,17a和17b和18a-c来描述,用于平台连接的着地系统内的元件由下列主要部件组成:快速分离机构51(见图15a-b)具有锁定球53的底座52(见图16a-c),具有下拉缸54的联轴件45(见图17a-b)和用于构架32的支承座外壳49(见图18a-c)。
在图15a-b内的快速分离机构由一个壳55,一个锁定爪56和一个脱扣装置57组成。脱扣装置57与船连接,并且通过机械或电子远程控制而受到控制。在平台上设有两个这种快速分离机构51,该快速分离机构51在底座52的每一侧上快速焊接到平台上,该底座52具有一个锁定球53(见图16a,b和c)。
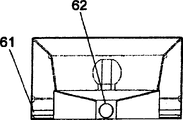
底座52由下列部件组成:一个圆壳58,该圆壳58具有内部锥形引导面59;锁定球53,该锁定球53具有用于拉入钢索的一个内垂直孔60;一个水平孔61,该水平孔61用来锁定拉入钢索和铆固销62。锁定爪56将销62锁定,因此底座52固定在平台甲板上。
图17a表示具有下拉缸54的联轴件45截取的垂直截面,图17b表示其底视图。在图17a中可看到一个圆形末端盖75和位于底部的一个着地凸缘64,以及枢轴承的一个外凸缘65,所述圆形末端盖75具有一个顶凸缘63以便插入下拉缸54。八个制动爪66悬挂在圆柱杆67的下端。
制动爪66内部呈球形,外部呈圆锥形。内部呈对应的圆锥形的裙座68可借助于致动器69垂直移动,该致动器69安装在一个凸缘70上,并且凸缘70依次安装在圆柱杆67上。在裙座68的下部,制动爪66在外力的作用下结合在一起,因此可绕球53锁定(见图16a)。固柱杆67设有一个纵向通孔71,以便穿过其中牵引钢索,圆柱杆67安装在一个活塞72内,该活塞72在缸54内可垂直移动。杆67穿过缸54的顶凸缘73,并具有拧在其上的一个外螺母74。
图18a-c表示构架32的支撑外壳49,它由一个圆壳49和一个旋转支承座76组成,该圆壳49具有支承轴承46的臂48以便安装构架32的支腿47。支承座76用螺栓固定到凸缘65上(见图17a),因此它伴随构架32运动。
船和平台之间根据下列步骤建立桥接:
通过如图15所示的快速分离机构51并通过绕销62的锁定爪56的锁定,如图1b所示的底座52预先锁定在平台甲板上。如图24所示,使船就位,并且,钢索77预先固定在平台上的底座52上。钢索77螺旋穿进球53内的通孔60中,以及圆柱杆67内的通孔71中,并安装在绞车V上(见图19)。当吊杆31弯折且构架32完全下垂时这可以在船的甲板上完成,然后当致动器42切断时,吊杆31的内部分34提高到最大直立位置,同时吊杆31的外部分35保持弯折,且构架32下降到一个垂直位置。
绞车V拉动钢索77,且构架32向吊杆部分35上的一个机械制动器牵引,因此沿这个方向拉动,吊杆31伸直(见图20)。致动器41现在启动,吊杆31向外伸直,因此联轴件45固定在平台的底座52上(见图21)。
吊杆提升致动器78和吊杆接头致动器41保持恒定力,与此同时,绞车V连续地向平台上的底座52牵引联轴件45(见图22)。图23a,23b和24表示在拉入过程中联轴件45所允许的角度偏斜和位置偏斜。图25和26表示在底座52内,指向联轴件45外部的内转向,它确保制动爪66的中心顶住球53。图27表示联轴件45下降到球53上并且通过钢索77的牵引力固定就位的情况。
驱动在联轴件45内的致动器79,裙座69向前推动,制动爪66与底座52固定连接(见图28)。
同时,吊杆接头致动器78和构架致动器42断开连接,吊杆致动器41开始使吊杆31上的外吊杆部分35下降(见图29)。通过对活塞72下侧施加压力驱动在联轴件45内的下拉缸54(图17a),该下拉缸54向下牵引末端盖75,因此着地凸缘68(图17a)与底座52(见图30)对接。下拉缸54向底座52内的支座80牵引着地凸缘68,因此具有支承座外壳49的联轴件45和构架32笔直向上伸到垂直位置(见图31和32),与此同时吊杆31的内部分34下降到工作位置(见图31),且吊杆提升致动器38完全松开,因此吊杆31自由悬挂在柱30和构架32内(见图33)。
手动紧固螺母74,下拉缸34的压力耗尽,因此机械地加以锚固(见图34)。
下面是一般地断开连接的步骤:驱动吊杆提升致动器78,因此吊杆31的内部分34提升,在吊杆接头致动器41上的恒定力起作用(见图35),联轴件45松开(见图36),当吊杆31处于充分直立位置时(见图37和38),联轴件45无阻碍地提升,而且,船受驱使马上离开。
下面是在紧急情况下的快速断开连接:驱动吊杆提升致动器78,因此吊杆31的内部分34提升,在吊杆接头致动器41上的恒定力起作用(见图39和40),而且,在快速分离机构51内的爪56松开(见图41)。吊杆提升致动器41使吊杆31上升,与此同时,船受驱动离开平台,并且,当底座52离开平台时,在构架致动器42上施加恒定力以便阻尼构架32的转动(见图42)。吊杆31弯折,这样驱动输送系统进入甲板上的收起状态(见图43)。
在上述描述中,为了避免使图不必要的复杂,没有表示工作走道33。在船和平台通过吊杆31和构架32建立连接之后,通过使用起重和输送系统81,可引导工作走道33升降。图44-47表示工作走道33断开连接,当连接时,可以以相同的方式但以相反顺序进行连接。
如图44所示,工作走道33的内端82悬挂在柱30上,并且其外端83悬挂在构架32内。当工作走道33将要断开连接时,其外端83与一个滑动吊车或移动绞车84连接,该滑动吊车或移动绞车84适合沿吊杆31运动。工作走道33提升并与构架31断开连接,滑动吊车84可收缩地使工作走道33向着柱30移动(见图45)。
当工作走道33完全收缩时,进一步驱动滑动吊车84,滑动吊车在工作走道内的连接点沿工作走道33滚动直到滑动吊车84运动到柱30的端部位置。在此期间,工作走道33的外端下降到船的甲板上(见图46)。最后,工作走道33的内端也下降到甲板上。
Claims (13)
1.一种运动吸收输送系统(1),它用来在一个浮动船(2)和一个站台(20)例如采油平台之间运输人和/或物体,其中船(2)和站台(20)可相对运动,该系统(1)包括一个吊杆(7,31),该吊杆(7,31)设有一个铰接头,该铰接头与船(2)和站台(20)中的一个连接;以及一个长度可变的工作走道(6,33),该工作走道具有一个铰接头,该铰接头与船(2)和站台(20)中相同的一个连接;和一个构架(8,32),该构架将与所述铰接头相对的吊杆(7,31)和工作走道(6,33)的端部连接在一起,在船(2)和站台(20)中的另一个上设有一个球座(19,45)和一个球(18,53)中的一个,在工作走道(6,33)的外端,或者在构架(8,32)的下端设有所述球座(19,45)和所述球(18,53)中的所述另一个,该球座(19,45)和球(18,53)中的所述另一个适合与所述球座(19,45)和所述球(18,53)中的所述一个接合,该所述球座(19,45)和所述球(18,53)中的所述一个位于船(2)和平台(20)中的所述另一个上,这样球/球座连接能够适应在三个轴向上在船(2)和站台(20)之间相对移动,
其特征在于,球(18,53)和/或球座(19,45)包括用于下拉钢索(27,77)的一个通孔(28,60),为了将工作走道向着船(2)和站台(20)中的所述另一个向下拉动,该下拉钢索可与球座(19,45)和球(18,53)中的所述另一个连接。
2.一种运动吸收输送系统(1),它用来在一个浮动船(2)和一个站台(20)例如采油平台之间运输人和/或物体,其中船(2)和站台(20)可相对运动,该系统(1)包括一个吊杆(7,31),该吊杆(7,31)设有一个铰接头,该铰接头与船(2)和站台(20)中的一个连接;以及一个长度可变的工作走道(6,33),该工作走道具有一个铰接头,该铰接头与船(2)和站台(20)中相同的所述一个连接;和一个连接装置(8,32),该连接装置将与所述铰接头相对的吊杆(7,31)和工作走道(6,33)的端部连接在一起,船(2)和站台(29)中的一个上设有一个装置,该装置用来使工作走道与船(2)和平台(20)中相同的所述一个牢固联接,
其特征在于用来使工作走道与船(2)和平台(29)中的所述一个牢固联接的装置包括一个球座(19,45)和一个球(18,53),球座(19,45)和球(18,53)中的所述一个布置在连接装置(8,32)的下端,且球座(19,45)和球(18,53)中的所述另一个布置在船(2)和平台(20)中的所述一个上,球(18,53)布置成与球座(19,45)接合,因此球/球座连接能够适应在三个轴向上在船(2)和站台(20)之间相对移动,球(18,53)和/或球座(19,45)包括用于下拉钢索(27,77)的一个通孔(28,60),为了将工作走道向着船(2)和站台(20)中的所述另一个向下拉动,该下拉钢索可与球座(19,45)和球(18,53)中的所述另一个连接,而且连接装置是一个构架,该构架与吊杆铰接联接。
3.一种运动吸收输送系统(1),它用来在一个浮动船(2)和一个站台(20)例如采油平台之间运输人和/或物体,其中船(2)和站台(20)可相对运动,该系统(1)包括一个吊杆(7,31),该吊杆(7,31)设有一个铰接头,该铰接头与船(2)和站台(20)中的一个连接;以及一个长度可变的工作走道(6,33),该工作走道具有一个铰接头,该铰接头与船(2)和站台(20)中相同的所述一个连接;和一个连接装置(8,32),该连接装置将与所述铰接头相对的吊杆(7,31)和工作走道(6,33)的端部连接在一起,船(2)和站台(29)中的一个上设有一个装置,该装置用来使工作走道与船(2)和平台(20)中相同的所述一个牢固联接,
其特征在于,用来使工作走道与船(2)和平台(29)中的所述一个牢固联接的装置包括一个球座(19,45)和一个球(18,53),球座(19,45)和球(18,53)中的所述一个布置在工作走道(6,33)的外端或连接装置(8,32)的下端,且球座(19,45)和球(18,53)中的所述另一个布置在船(2)和平台(29)中的所述一个上,球(18,53)布置成与球座(19,45)接合,因此球/球座连接能够适应在三个轴向上在船(2)和站台(20)之间相对移动,球(18,53)和/或球座(19,45)包括用于下拉钢索(27,77)的一个通孔(28,60),为了将工作走道向着船(2)和站台(20)中的所述另一个向下拉动,该下拉钢索可与球座(19,45)和球(18,53)中的所述另一个连接,而且连接装置是一个构架,吊杆具有一个沿吊杆长度方向可移动的滑动吊车。
4.如权利要求1,2或3所述的输送系统,其特征在于,构架(8,32)包括两个支腿(13,14;47),该支腿可旋转地与吊杆(7,31)连接,并且从吊杆(7,31)的各侧伸展,而且在两侧包围工作走道(6,33),支腿(13,14;47)之间限定了一个开口(16),沿(7,31)运动的滑动吊车(22,84)能够穿过该开口(16)移动。
5.如权利要求4所述的输送系统,其特征在于,球(18,53)和球座(19,45)借助朝向下的正牵引力相对牵引,使用绞车施加一恒定牵引力来对抗向下的牵引力。
6.如权利要求5所述的输送系统,其特征在于,构架(8,32)借助一个致动器(21,42)相对于吊杆(7,31)强制旋转。
7.如权利要求1,2或3所述的输送系统,其特征在于,吊杆(31)铰接。
8.如权利要求1,2或3所述的输送系统,其特征在于,工作走道(6,33)设计成借助滑动吊车(22,84)回缩到回收状态,滑动吊车(22,84)适合使工作走道下降到船(20)的甲板上。
9.如权利要求1,2或3所述的输送系统,其特征在于,它包括一个联接装置以便将球(53)固定在球座(45)上。
10.在一个浮动船(2)和一个站台(20)之间形成一种可活动连接的方法,其中支承工作走道(6,33)并与船(2)和站台(20)中的一个连接的吊杆(7,31)摆动到一个位置,在该位置,在工作走道(6,33)的外端,球座(19,45)和球(18,53)中的一个大致位于球座(19,45)和球(18,53)中的另一个之上,该球座(19,45)和球(18,53)中的另一个位于船(2)和站台(20)中的另一个之上,其特征在于,下拉钢索(27,77)在球(18,53)和球座(19,45)之间连接,球(18,53)和球座(19,45)相对牵引,而且球(18,53)落在球座(19,45)内。
11.在一个浮动船(2)和一个站台(20)之间形成一种可活动连接的方法,其中支承工作走道(6,33)并与船(2)和站台(20)中的一个连接的吊杆(7,31)摆动到一个位置,在该位置,在工作走道(6,33)的外端,球座(19,45)和球(18,53)中的一个大致位于球座(19,45)和球(18,53)中的另一个之上,该球座(19,45)和球(18,53)中的另一个位于船(2)和站台(20)中的另一个之上,其特征在于,下拉钢索(27,77)在球(18,53)和球座(19,45)之间连接,球(18,53)和球座(19,45)相对牵引,而且球(18,53)落在球座(19,45)内,工作走道可伸缩,沿吊杆长度方向可移动的一个滑动吊车悬挂在工作走道(6,33)的外端,直到它回收并落在船(2)或站台(20)上。
12.如权利要求10或11所述的方法,其特征在于,构架(8,32)与吊杆(7,31)的外端连接,且包括球座(19,45)和球(18,53)中的一个,该构架与球座(19,45)和球(18,53)中的另一个联接,且工作走道(6,33)悬挂在构架(8,32)内。
13.如权利要求10或11所述的方法,其特征在于具有恒定牵引力的绞车用来固定吊杆(7,31),该吊杆(7,31)吊在球座(19,45)和球(18,53)中的另一个之上,而且当球(18,53)落在球座(19,45)内时,绞车没有承载,因此吊杆(7,31)和工作走道(6,33)的重量或者通过夹紧装置的辅助作用,从而使球(18,53)和球座(19,45)固定结合。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| NO972820 | 1997-06-18 | ||
| NO972820A NO972820L (no) | 1997-06-18 | 1997-06-18 | Bevegelsesabsorberende overf°ringssystem |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN1261312A CN1261312A (zh) | 2000-07-26 |
| CN1100699C true CN1100699C (zh) | 2003-02-05 |
Family
ID=19900843
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN98806414A Expired - Fee Related CN1100699C (zh) | 1997-06-18 | 1998-06-17 | 运动吸收输送系统 |
Country Status (15)
| Country | Link |
|---|---|
| US (1) | US6347424B1 (zh) |
| EP (1) | EP0988221B1 (zh) |
| KR (1) | KR100538336B1 (zh) |
| CN (1) | CN1100699C (zh) |
| AT (1) | ATE248743T1 (zh) |
| AU (1) | AU742804B2 (zh) |
| BR (1) | BR9810166A (zh) |
| CA (1) | CA2294973A1 (zh) |
| DE (1) | DE69817813D1 (zh) |
| DK (1) | DK173816B1 (zh) |
| HK (1) | HK1027541A1 (zh) |
| NO (1) | NO972820L (zh) |
| NZ (1) | NZ501561A (zh) |
| RU (1) | RU2200685C2 (zh) |
| WO (1) | WO1998057845A1 (zh) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN106167074A (zh) * | 2016-08-08 | 2016-11-30 | 燕山大学 | 一种用于海上人员或货物转运的耦合约束补偿式接送桥 |
| CN107249978A (zh) * | 2015-02-24 | 2017-10-13 | 裕廊船厂有限公司 | 使用可浮动海上仓库的方法 |
Families Citing this family (35)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| NL1016111C2 (nl) * | 2000-09-06 | 2002-03-07 | P & R Systems | Werkwijze voor het betreden van een in zee geplaatste paal, alsmede daarbij te gebruiken inrichting. |
| US6766760B2 (en) * | 2002-01-23 | 2004-07-27 | Worldwide Safety, Llc | Flexible marker device |
| GB2394498B (en) * | 2002-10-23 | 2006-08-09 | Engineering Business Ltd | Mounting of offshore structures |
| GB0306547D0 (en) * | 2003-03-21 | 2003-04-23 | Engineering Business Ltd | Apparatus for creating a local reduction in wave height |
| US7984525B2 (en) * | 2004-08-03 | 2011-07-26 | Ihc Engineering Business Limited | Access method between marine structures and apparatus |
| GB0503083D0 (en) * | 2005-02-15 | 2005-03-23 | Engineering Business Ltd | Launch and recovery apparatus and method |
| GB2428656B (en) * | 2005-08-01 | 2009-08-05 | Engineering Business Ltd | Gangway apparatus |
| GB2434823A (en) * | 2006-02-06 | 2007-08-08 | Engineering Business Ltd | Transport and installation of offshore structures |
| ITMI20061804A1 (it) * | 2006-09-22 | 2008-03-23 | Besenzoni S P A | Passerella di accesso per imbarcazioni in titanio |
| US7934283B2 (en) * | 2008-02-12 | 2011-05-03 | Lockheed Martin Corporation | Gangway latch |
| MX2010008831A (es) * | 2008-02-12 | 2010-11-30 | Lockheed Corp | Sistema de traslado de tripulacion. |
| ATE532700T1 (de) | 2008-08-01 | 2011-11-15 | Xemc Darwind Bv | Systeme zum umsetzen einer person oder ladung zwischen einem schiff und einem meeresbauwerk |
| US20110170988A1 (en) * | 2008-09-19 | 2011-07-14 | Keppel Offshore & Marine Technology Centre Pte Ltd | Cargo transfer system |
| US7950096B2 (en) * | 2008-09-23 | 2011-05-31 | Petroleum Specialty Rental, Llc | Fluid flow system bridge with walkway |
| US7996942B2 (en) * | 2009-02-12 | 2011-08-16 | Lockheed Martin Corporation | Rotating gangway support platform |
| US8407840B2 (en) * | 2009-09-01 | 2013-04-02 | Lockheed Martin Corporation | Self releasing cable system |
| US9180941B1 (en) * | 2009-11-08 | 2015-11-10 | Jurong Shipyard Pte Ltd. | Method using a floatable offshore depot |
| WO2011091854A1 (en) | 2010-01-29 | 2011-08-04 | Xemc Darwind B.V. | System for transferring a person or a load between a vessel and an offshore structure |
| US8220095B2 (en) * | 2010-01-29 | 2012-07-17 | Skanska USA Civil Inc. | Highway overpass bridge modification system and method |
| CN102310928A (zh) * | 2010-07-02 | 2012-01-11 | 交通部水运科学研究所 | L型旅客登船桥 |
| CN102383370A (zh) * | 2010-08-31 | 2012-03-21 | 交通运输部水运科学研究所 | 双通道旅客登船桥 |
| WO2012138227A1 (en) * | 2011-04-08 | 2012-10-11 | U-Sea Beheer B.V. | Transfer system, ship and method for transferring persons and/or goods to and/or from a floating ship |
| KR101301998B1 (ko) * | 2011-11-23 | 2013-09-02 | 삼성중공업 주식회사 | 상대운동감소장치 및 이를 포함하는 부유체 |
| NL2008920C2 (en) * | 2012-06-01 | 2013-12-04 | Knowledge B V Z | Vessel provided with a gangway supported by a 2-dof hinged upright column, in particular a cardan. |
| DE202012103562U1 (de) * | 2012-09-18 | 2013-12-20 | Rolf Rohden | Schwimmkörper mit einem Kran |
| DK2920051T3 (da) * | 2012-11-19 | 2020-04-06 | U Sea Beheer B V | Overførselssystem, skib og fremgangsmåde til overførsel af personer og/eller varer til og/eller fra et flydende skib |
| DK2752361T3 (en) * | 2013-01-04 | 2016-06-06 | Hallcon B V | Lifting system and accompanying connector holding device |
| NL2010104C2 (en) * | 2013-01-10 | 2014-07-15 | Ampelmann Operations B V | A vessel, a motion platform, a control system, a method for compensating motions of a vessel and a computer program product. |
| NL2012069C2 (en) | 2014-01-09 | 2015-07-13 | Ampelmann Operations B V | A vessel, a motion platform, a control system, a method for compensating motions of a vessel and a computer program product. |
| WO2016079679A1 (en) * | 2014-11-17 | 2016-05-26 | Saipem S.P.A. | Connecting device and method for supporting an apparatus designed to couple to a pipeline |
| CN105173007B (zh) * | 2015-09-30 | 2018-04-03 | 南通中远船务工程有限公司 | 一种海上输送船员系统 |
| US10053195B1 (en) * | 2016-01-29 | 2018-08-21 | The United States Of America As Represented By The Secretary Of The Navy | Shipboard side-mounted extending articulated boom for fueling and maintenance operations |
| NO341926B1 (no) * | 2016-06-15 | 2018-02-19 | Kystvaagen Slip & Mek As | Gangvei for overføring av personell og utstyr fra en første innretning til en andre innretning |
| NL2017721B1 (en) * | 2016-11-04 | 2018-05-23 | Ampelmann Holding B V | Motion compensation system and method |
| US11028541B2 (en) * | 2018-12-22 | 2021-06-08 | Richard Carl Till | Modular bridge system |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4083072A (en) * | 1974-08-30 | 1978-04-11 | Ryan William J | Connection system for marine structures |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2641785A (en) * | 1948-06-26 | 1953-06-16 | Standard Oil Dev Co | Marine transfer ramp |
| US4011615A (en) * | 1975-11-12 | 1977-03-15 | Continental Oil Company | Personnel transfer gangway |
| SE419736B (sv) * | 1978-03-17 | 1981-08-24 | Welin Ab | Embarkeringsanordning vid fartyg |
| US4169296A (en) * | 1978-03-21 | 1979-10-02 | Ingenieursbureau Marcon (Marine Consultants) B.V. | Connecting bridge for personnel to connect two mutually movable marine structures |
| US4421051A (en) * | 1979-10-29 | 1983-12-20 | Sedco, Inc. | Auxiliary boom for emergency evacuation |
| GB2115361B (en) * | 1982-02-24 | 1985-07-10 | Gec Elliott Mech Handling | Access means |
| US4580986A (en) * | 1983-07-19 | 1986-04-08 | Single Buoy Moorings, Inc. | Mooring system comprising a floating body having storage capacity e.g. a tanker and a buoy anchored to the sea bottom |
| GB2156743B (en) * | 1984-04-02 | 1987-09-03 | Taylor Woodrow Const Ltd | Bridges |
| US4590634A (en) * | 1984-12-20 | 1986-05-27 | The Boeing Company | Marine transfer device |
-
1997
- 1997-06-18 NO NO972820A patent/NO972820L/no unknown
-
1998
- 1998-06-17 BR BR9810166-8A patent/BR9810166A/pt not_active IP Right Cessation
- 1998-06-17 CA CA002294973A patent/CA2294973A1/en not_active Abandoned
- 1998-06-17 DE DE69817813T patent/DE69817813D1/de not_active Expired - Lifetime
- 1998-06-17 EP EP98928666A patent/EP0988221B1/en not_active Expired - Lifetime
- 1998-06-17 RU RU99128066/28A patent/RU2200685C2/ru not_active IP Right Cessation
- 1998-06-17 WO PCT/NO1998/000184 patent/WO1998057845A1/en active IP Right Grant
- 1998-06-17 AT AT98928666T patent/ATE248743T1/de not_active IP Right Cessation
- 1998-06-17 KR KR10-1999-7011976A patent/KR100538336B1/ko not_active IP Right Cessation
- 1998-06-17 CN CN98806414A patent/CN1100699C/zh not_active Expired - Fee Related
- 1998-06-17 NZ NZ501561A patent/NZ501561A/xx active IP Right Revival
- 1998-06-17 AU AU80415/98A patent/AU742804B2/en not_active Ceased
-
1999
- 1999-12-16 US US09/465,342 patent/US6347424B1/en not_active Expired - Fee Related
- 1999-12-17 DK DK199901816A patent/DK173816B1/da not_active IP Right Cessation
-
2000
- 2000-10-27 HK HK00106868A patent/HK1027541A1/xx not_active IP Right Cessation
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4083072A (en) * | 1974-08-30 | 1978-04-11 | Ryan William J | Connection system for marine structures |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107249978A (zh) * | 2015-02-24 | 2017-10-13 | 裕廊船厂有限公司 | 使用可浮动海上仓库的方法 |
| CN107249978B (zh) * | 2015-02-24 | 2020-03-13 | 裕廊船厂有限公司 | 使用可浮动海上仓库的方法 |
| CN106167074A (zh) * | 2016-08-08 | 2016-11-30 | 燕山大学 | 一种用于海上人员或货物转运的耦合约束补偿式接送桥 |
Also Published As
| Publication number | Publication date |
|---|---|
| BR9810166A (pt) | 2000-08-08 |
| EP0988221B1 (en) | 2003-09-03 |
| AU8041598A (en) | 1999-01-04 |
| NO972820L (no) | 1998-12-21 |
| KR20010013950A (ko) | 2001-02-26 |
| AU742804B2 (en) | 2002-01-10 |
| CA2294973A1 (en) | 1998-12-23 |
| WO1998057845A1 (en) | 1998-12-23 |
| DE69817813D1 (de) | 2003-10-09 |
| ATE248743T1 (de) | 2003-09-15 |
| DK173816B1 (da) | 2001-11-12 |
| NZ501561A (en) | 2000-11-24 |
| CN1261312A (zh) | 2000-07-26 |
| HK1027541A1 (en) | 2001-01-19 |
| US6347424B1 (en) | 2002-02-19 |
| NO972820D0 (no) | 1997-06-18 |
| RU2200685C2 (ru) | 2003-03-20 |
| EP0988221A1 (en) | 2000-03-29 |
| DK199901816A (da) | 1999-12-17 |
| KR100538336B1 (ko) | 2005-12-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN1100699C (zh) | 运动吸收输送系统 | |
| TWI756465B (zh) | 離岸結構配合系統及其安裝方法 | |
| CN103231998B (zh) | 一种具有提升起重机的船只 | |
| CN1934026A (zh) | 货物集装箱装卸门式起重机的钢索缠绕支撑系统 | |
| CN203079640U (zh) | 一种移动广角式救援电梯及救援车 | |
| CN1076710C (zh) | 起重设备 | |
| CN1200350A (zh) | 集装箱起重机 | |
| CN113697084A (zh) | 一种带阻尼平衡自调节一体化锚泊车 | |
| CN112850516B (zh) | 带有可动防晃架的船用起重装置 | |
| CN102642599A (zh) | 一种拖缆机的螺杆传动可分离排缆器 | |
| CN108082396B (zh) | 一种自升式登船梯 | |
| CN106144423A (zh) | 一种输送臂可伸缩的输送机 | |
| CN108974257A (zh) | 一种救助艇收放装置 | |
| CN116950560A (zh) | 一种海上风机登乘舷梯 | |
| CN216070482U (zh) | 一种带阻尼平衡自调节一体化锚泊车 | |
| CN112298465B (zh) | 一种船用全自动折叠回转式舷梯 | |
| CN204895784U (zh) | 一种伸缩折叠式物料输送装置及运输船舶 | |
| CN103434952A (zh) | 一种超起涨紧锁止机构及起重机 | |
| CN203255912U (zh) | 车载手动起吊装置 | |
| CN112551385B (zh) | 一种码头装卸设备 | |
| CN221606009U (zh) | 一种船载艇收放装置 | |
| CN221396963U (zh) | 起吊装置及客运系统 | |
| CN212149212U (zh) | 一种平移伸缩式舷梯结构 | |
| CN118545605B (zh) | 一种用于机场建筑修建的钢筋混凝土构件吊装系统及方法 | |
| CN112298466B (zh) | 一种具有全自动折叠回转式舷梯的科考船 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| C19 | Lapse of patent right due to non-payment of the annual fee | ||
| CF01 | Termination of patent right due to non-payment of annual fee |