CN109850577B - 一种智能化机械气力混合输送式剩(残)料回收设备 - Google Patents
一种智能化机械气力混合输送式剩(残)料回收设备 Download PDFInfo
- Publication number
- CN109850577B CN109850577B CN201910144039.3A CN201910144039A CN109850577B CN 109850577 B CN109850577 B CN 109850577B CN 201910144039 A CN201910144039 A CN 201910144039A CN 109850577 B CN109850577 B CN 109850577B
- Authority
- CN
- China
- Prior art keywords
- roller cleaning
- residual
- pneumatic
- horizontal roller
- cleaning device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images


Landscapes
- Cleaning In General (AREA)
- Processing Of Solid Wastes (AREA)
Abstract
本发明涉及一种智能化机械气力混合输送式剩(残)料回收设备。包括包括立辊清扫装置(1)、卧辊清扫装置(2)、气力吸送装置(3)、行走装置(4)、传动系统(5)、发动机(6)、料仓(7)、送料出口(8)、驾驶室(9)、机械输送系统(10)、搅龙(11)和传感器(12)组成;其特征在于:所述位于设备最前端的是两侧的立辊清扫装置(1),传感器(11)布置在两立辊清扫装置(1)的外侧,通过测控装置自动调整机器前进方向;中间是卧辊清扫装置(2),卧辊清扫装置(2)后面是搅龙(11),搅龙(11)后面是气力吸附通道和抛送装置,连同传动系统(5)等组成收集工作台,收集工作台悬挂在主机最前端,有悬挂装置和提升装置进行升降。
Description
技术领域
本发明公开了一种智能化机械气力混合输送式剩(残)料回收设备,属于农业机械技术领域。
背景技术
霉菌或真菌产生的有毒有害物质对奶牛业影响很大,目前对畜牧业威胁最大的霉菌毒素有黄曲霉毒素、玉米赤霉烯酮等。黄曲霉毒素主要是由曲霉属真菌 ( 包括黄曲霉和寄生曲霉 ) 产生的,具有肝毒性 ( 引起动物肝脏损伤 )、免疫抑制、致癌、致畸和致突变作用,直接威胁着畜牧业的健康发展。如何安全健康进行奶牛养殖是奶牛现代化科学养殖的关键。过期料有利于霉菌或真菌产生,是奶牛饲喂过程的大敌,也是精确饲喂要解决的关键环节之一。目前,每天全混合日粮(TMR)的剩(残)料收集,基本都是靠人工和辅助机具完成,严重影响和制约了精准饲喂的管理目标,在奶牛养殖发展到科学化、体系化、规范化、规模化、标准化的养殖模式已经替代了经验式的(家庭式、散养式、集约式等)落后养殖模式的当下,奶牛现代化科学养殖的水平,已经逐步达到和实现了机械化、自动化、智能化的阶段性目标,奶牛科学化养殖的体系和目标不断创立、创新和提高,奶牛养殖业已然成为畜牧养殖的高科技行业。科学化养牛,精准饲喂是饲养的关键环节之一。科学化养牛,离不开技术装备的现代化。机械化、自动化、智能化的饲喂设备是组成精准饲喂的关键设备。目前,饲喂设备已有全混合日粮(TMR)制备机、精(粗)料配送系统及装备、撒料车、推料车(机具)等,也急需一种清理并回收剩(残)料设备来解决人工效率低下,周期长,清理不净等问题。
在此背景下,在没有国外经验借鉴的情况下,本发明结合国内外研究现状,主要针对精准饲喂所需,结合全混合日粮(TMR)技术,对饲喂剩(残)料收集进行重点研究,研发了一种智能化机械气力混合输送式剩(残)料回收设备可实现机械化自动收集剩(残)料,不仅节本增效,还极大提高了生产效率。
发明内容
本发明的目的是提供一种智能化机械气力混合输送式剩(残)料回收设备。
为了达到上述目的,本发明结合国内外研究现状,主要针对精准饲喂所需,结合全混合日粮(TMR)技术,对饲喂剩(残)料收集进行重点研究,研发了一种智能化机械气力混合输送式剩(残)料回收设备。
结合附图,说明如下:一种智能化机械气力混合输送式剩(残)料回收设备,包括立辊清扫装置1、卧辊清扫装置2、气力吸送装置3、行走装置4、传动系统5、发动机6、料仓7、送料出口8、驾驶室9、机械输送系统10 、搅龙11、传感器12、轴套13、梳齿14、管轴15和叶板16组成;其特征在于:所述位于设备最前端的是两侧的立辊清扫装置1,传感器11布置在两立辊清扫装置1的外侧,通过测控装置自动调整机器前进方向;中间是卧辊清扫装置2,卧辊清扫装置2后面是搅龙11,搅龙11后面是气力吸附通道和抛送装置,连同传动系统5等组成收集工作台,收集工作台悬挂在主机最前端,有悬挂装置和提升装置进行升降;主机由行走装置4、传动系统5、发动机6、料仓7、送料出口8、驾驶室9等组成,工作时,机器在自动调控装置的导航下自动调整方向前进,两侧立辊清扫装置1在传动装置的驱动下旋转清扫驱使剩(废)料向机器中间通道集中,经卧辊清扫装置2将剩(废)料抛向搅龙11,搅龙11集中剩(废)料后抛向机械输送系统10并经机械输送系统10输送到料仓7,完成机械收集剩(废)料过程;机械回收装置未清理干净部分剩(废)料由气力吸送装置3吸附口吸起并送进气力吸附通道内,经气力吸送装置3抛送经送料出口8到料仓7中,最后完成气力清理并输送剩(废)料收集过程,收集满仓的剩(废)料通过液压装置翻卸到指定位置。
本发明的积极效果是:立辊清扫装置1与铅垂反向呈±0-90°角,角度可以调整,立辊清扫装置1的清扫直径为0.01-150米,立辊清扫装置1距离地面高度可以在0-20米范围内调整,两辊中间距离0.1-150米;卧辊清扫装置2与地面距离在0-20米范围内可调,清扫直径为0.01-150米,紧邻的气力吸附口下面的托板与地面距离在0-20米范围内可调,气力吸送装置3位于机器中间±0-20米范围内;行走装置4为轮式和履带式,传动系统5采用带或者链传动或者齿轮传动,发动机6布置在驾驶室后面,料仓7布置在发动机6后面也是主机最后面,通过液压系统顶仓翻转卸料;两立辊清扫装置1外侧安装有可拆卸式剩(废)料移送刮板,再不需要回收饲喂料时可以移送饲喂料到饲养栏附件方便牲畜吃料。
附图说明
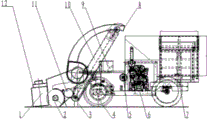
图1是一种智能化机械气力混合输送式剩(残)料回收设备主视图;
图2是一种智能化机械气力混合输送式剩(残)料回收设备中卧辊清扫装置方案一示意图;
图3是一种智能化机械气力混合输送式剩(残)料回收设备中卧辊清扫装置方案二示意图;
图中:1.立辊清扫装置;2.卧辊清扫装置;3.气力吸送装置;4.行走装置;5.传动系统;6.发动机;7.料仓;8.送料出口;9.驾驶室;10.机械输送系统;11.搅龙;12.传感器;13.轴套;14.梳齿;15.管轴;16.叶板。
具体实施方式
下面结合附图给出的实施例对本发明做进一步的详细描述。
参照图1、图2和图3,一种智能化机械气力混合输送式剩(残)料回收设备,包括立辊清扫装置1、卧辊清扫装置2、气力吸送装置3、行走装置4、传动系统5、发动机6、料仓7、送料出口8、驾驶室9、机械输送系统10、搅龙11、传感器12、轴套13、梳齿14、管轴15和叶板16组成;其特征在于:所述位于设备最前端的是两侧的立辊清扫装置1,传感器11布置在两立辊清扫装置1的外侧,通过测控装置自动调整机器前进方向;中间是卧辊清扫装置2,卧辊清扫装置2后面是搅龙11,搅龙11后面是气力吸附通道和抛送装置,连同传动系统5等组成收集工作台,收集工作台悬挂在主机最前端,有悬挂装置和提升装置进行升降;主机由行走装置4、传动系统5、发动机6、料仓7、送料出口8、驾驶室9等组成,工作时,机器在自动调控装置的导航下自动调整方向前进,两侧立辊清扫装置1在传动装置的驱动下旋转清扫驱使剩(废)料向机器中间通道集中,经卧辊清扫装置2将剩(废)料通过搅龙11抛向机械输送系统10 并由输送机械输送系统10 到料仓,完成机械部分收集;地下未清扫干净部分通过吸风口将剩(废)料送进气力吸附通道内,经气力吸送装置3抛送经送料出口8到料仓7中,完成最后清理剩(废)料收集过程,收集满仓的剩(废)料通过液压装置翻卸到指定位置。
参照图1、图2和图3,立辊清扫装置1与铅垂反向呈±0-90°角,角度可以调整,立辊清扫装置1的清扫直径为0.01-150米,立辊清扫装置1距离地面高度可以在0-20米范围内调整,两辊中间距离0.1-150米;卧辊清扫装置2与地面距离在0-20米范围内可调,清扫直径为0.01-150米,紧邻的气力吸附口下面的托板与地面距离在0-20米范围内可调,气力吸送装置3位于机器中间±0-20米范围内;行走装置4为轮式和履带式,传动系统5采用带或者链传动或者齿轮传动,发动机6布置在驾驶室后面,料仓7布置在发动机6后面也是主机最后面,通过液压系统顶仓翻转卸料;两立辊清扫装置1外侧安装有可拆卸式剩(废)料移送刮板,再不需要回收饲喂料时可以移送饲喂料到饲养栏附件方便牲畜吃料。
参照图1、图2和图3,所述卧辊清扫装置2方案一采用螺旋线方式分布有间隔1-150mm的梳齿14,梳齿14长度为1-200mm,形状为y=X2+X+1至y=10101X2+101010X+101010之间的曲线,梳齿14根部宽度1-60mm,尖部0.1-20mm;;卧辊清扫装置2方案二卧辊清扫装置主轴上由轴套13、管轴15等组成,叶板16呈倾斜角度α=1-60°配置,叶板形状为曲线公式:y=1.35*10-7*X4-8.75*10-5*X3+0.01*X2-X-35形成的曲面。
最后所应说明的是,以上所述的具体实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者同等替换,而不脱离本发明技术方案的精神和范围,其均应涵盖在本发明的权利要求范围当中。
Claims (1)
1.一种智能化机械气力混合输送式剩料回收设备,包括立辊清扫装置(1)、卧辊清扫装置(2)、气力吸送装置(3)、行走装置(4)、传动系统(5)、发动机(6)、料仓(7)、送料出口(8)、驾驶室(9)、机械输送系统(10) 、搅龙(11)和传感器(12)组成;其特征在于:位于回收设备最前端的是两侧的立辊清扫装置(1),传感器(12)布置在两立辊清扫装置(1)的外侧,通过测控装置自动调整回收设备前进方向;中间是卧辊清扫装置(2),卧辊清扫装置(2)后面是搅龙(11),搅龙(11)后面是气力吸附通道和抛送装置,连同传动系统(5)组成收集工作台,收集工作台悬挂在主机最前端,由悬挂装置和提升装置进行升降;主机由行走装置(4)、传动系统(5)、发动机(6)、料仓(7)、送料出口(8)、驾驶室(9)组成;两立辊清扫装置(1)对称在回收设备前两侧布置,立辊清扫装置(1)与铅垂方向呈±0-90°角,角度能够调整,立辊清扫装置(1)的清扫直径为0.01-150米,立辊清扫装置(1)距离地面高度能够在0-20米范围内调整,两立辊清扫装置(1)中间距离0.1-150米;卧辊清扫装置(2)与地面距离在0-20米范围内可调,清扫直径为0.01-150米,紧邻的气力吸附口下面的托板与地面距离在0-20米范围内可调;气力吸送装置(3)位于回收设备中间±0-20米范围内;行走装置(4)为轮式和履带式,传动系统(5)采用带或者链传动或者齿轮传动,发动机(6)布置在驾驶室后面,料仓(7)布置在发动机(6)后面也是主机最后面,通过液压系统顶仓翻转卸料;两立辊清扫装置(1)外侧安装有可拆卸式剩料移送刮板,在不需要回收饲喂料时能够移送饲喂料到饲养栏附近方便牲畜吃料;卧辊清扫装置(2)方案一采用螺旋线方式分布有间隔1-100mm的梳齿(14),梳齿(14)长度为1-300mm,形状为y=X2+X+1至y=10101X2+101015X+101015之间的曲线,梳齿(14)根部宽度1-60mm,尖部0.1-30mm;卧辊清扫装置(2)方案二卧辊清扫装置主轴上由轴套(13)、管轴(15)组成,叶板(16)呈倾斜角度α=1-65°配置,叶板形状为曲线公式:y=1.35*10-7*X4-8.75*10-5*X3+0.01*X2-X-35形成的曲面;工作时,回收设备在测控装置的导航下自动调整方向前进,两侧立辊清扫装置(1)在传动装置的驱动下旋转清扫驱使剩料向回收设备中间通道集中,经卧辊清扫装置(2)将剩料通过搅龙(11)抛向机械输送系统(10)并由机械输送系统输送到料仓,完成机械部分收集,地下未清扫干净部分通过吸风口将剩料送进气力吸附通道内,经气力吸送装置(3)抛送经送料出口(8)到料仓(7)中,完成最后清理剩料收集过程,收集满仓的剩料通过液压装置翻卸到指定位置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201910144039.3A CN109850577B (zh) | 2019-02-27 | 2019-02-27 | 一种智能化机械气力混合输送式剩(残)料回收设备 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201910144039.3A CN109850577B (zh) | 2019-02-27 | 2019-02-27 | 一种智能化机械气力混合输送式剩(残)料回收设备 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN109850577A CN109850577A (zh) | 2019-06-07 |
| CN109850577B true CN109850577B (zh) | 2021-07-30 |
Family
ID=66899129
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201910144039.3A Active CN109850577B (zh) | 2019-02-27 | 2019-02-27 | 一种智能化机械气力混合输送式剩(残)料回收设备 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN109850577B (zh) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110432836A (zh) * | 2019-07-28 | 2019-11-12 | 山东理工大学 | 一种智能化气力吸送式剩(残)料回收设备 |
| CN110304458A (zh) * | 2019-08-01 | 2019-10-08 | 山东理工大学 | 一种气力吸送式物料收集设备 |
| CN111232670A (zh) * | 2020-01-16 | 2020-06-05 | 淄博翔宇机械有限公司 | 大宽幅气力吸送式剩料回收装置 |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0367732A1 (en) * | 1988-10-31 | 1990-05-09 | Vincenzo Poli | Mini sucking battery motorbrush |
| CN2134421Y (zh) * | 1992-09-14 | 1993-05-26 | 南京农业大学农业工程学院 | 梧桐落叶收集机 |
| AT397825B (de) * | 1989-04-11 | 1994-07-25 | Ernst Augl Ges M B H & Co Kg | Fahrbare vorrichtung für die strassenpflege |
| CN2500713Y (zh) * | 2001-10-12 | 2002-07-17 | 周凤辉 | 多功能清扫机 |
| CN106561160A (zh) * | 2015-11-30 | 2017-04-19 | 周潘玉 | 一种分级统收式采棉机摘头及采棉机 |
| CN106576594A (zh) * | 2017-02-20 | 2017-04-26 | 重庆机床(集团)有限责任公司 | 自走式伸缩脱棉采棉机 |
| CN108487148A (zh) * | 2018-04-02 | 2018-09-04 | 长沙学院 | 竹签垃圾清理车 |
| CN208501585U (zh) * | 2018-05-29 | 2019-02-15 | 山东飞牛农牧设备有限公司 | 养牛场饲牛余料自动清扫收料一体设备 |
-
2019
- 2019-02-27 CN CN201910144039.3A patent/CN109850577B/zh active Active
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0367732A1 (en) * | 1988-10-31 | 1990-05-09 | Vincenzo Poli | Mini sucking battery motorbrush |
| AT397825B (de) * | 1989-04-11 | 1994-07-25 | Ernst Augl Ges M B H & Co Kg | Fahrbare vorrichtung für die strassenpflege |
| CN2134421Y (zh) * | 1992-09-14 | 1993-05-26 | 南京农业大学农业工程学院 | 梧桐落叶收集机 |
| CN2500713Y (zh) * | 2001-10-12 | 2002-07-17 | 周凤辉 | 多功能清扫机 |
| CN106561160A (zh) * | 2015-11-30 | 2017-04-19 | 周潘玉 | 一种分级统收式采棉机摘头及采棉机 |
| CN106576594A (zh) * | 2017-02-20 | 2017-04-26 | 重庆机床(集团)有限责任公司 | 自走式伸缩脱棉采棉机 |
| CN108487148A (zh) * | 2018-04-02 | 2018-09-04 | 长沙学院 | 竹签垃圾清理车 |
| CN208501585U (zh) * | 2018-05-29 | 2019-02-15 | 山东飞牛农牧设备有限公司 | 养牛场饲牛余料自动清扫收料一体设备 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN109850577A (zh) | 2019-06-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN109850577B (zh) | 一种智能化机械气力混合输送式剩(残)料回收设备 | |
| CN107223400A (zh) | 一种多功能牧草收割机 | |
| CN104773950B (zh) | 玻璃采样管自动断管系统 | |
| CN207185232U (zh) | 一种多功能牧草收割机 | |
| CN204132146U (zh) | 自走式发料车 | |
| CN210275171U (zh) | 自走式秸秆捡拾饲料打捆机 | |
| CN105519454B (zh) | 鸡舍收粪车 | |
| CN108914843B (zh) | 一种畜牧用粪便收集装置 | |
| CN110432836A (zh) | 一种智能化气力吸送式剩(残)料回收设备 | |
| CN205755319U (zh) | 一种弹齿式残膜回收机的膜土分离装置 | |
| CN111250479B (zh) | 紧凑型气力吸送式剩料回收车 | |
| CN205491781U (zh) | 籽瓜收获机 | |
| CN112658014B (zh) | 一种园林大型垃圾粉碎设备 | |
| US3731569A (en) | Harvesting machine | |
| CN204669917U (zh) | 滚轮式红枣捡拾机 | |
| CN205546950U (zh) | 鸡舍收粪车 | |
| CN217229138U (zh) | 青贮取料机 | |
| CN210275165U (zh) | 自走式后出捆饲料打捆机 | |
| CN107409619A (zh) | 一种轻便水稻收割装置 | |
| CN206948928U (zh) | 一种轻便水稻收割装置 | |
| CN104823608A (zh) | 自走式甜菜堆装清杂机 | |
| CN204408975U (zh) | 自走式甜菜堆装清杂机 | |
| CN109496535A (zh) | 一种牧草高效收割装置 | |
| CN115956836A (zh) | 一种机械气力一体式剩料回收机 | |
| CN220629988U (zh) | 一种用于农业改良土壤的农业设备 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |