CN109844842B - 驾驶模式切换控制装置、系统、方法以及存储介质 - Google Patents
驾驶模式切换控制装置、系统、方法以及存储介质 Download PDFInfo
- Publication number
- CN109844842B CN109844842B CN201780063054.4A CN201780063054A CN109844842B CN 109844842 B CN109844842 B CN 109844842B CN 201780063054 A CN201780063054 A CN 201780063054A CN 109844842 B CN109844842 B CN 109844842B
- Authority
- CN
- China
- Prior art keywords
- driving mode
- switching
- driver
- vehicle
- signal
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title description 10
- 238000003384 imaging method Methods 0.000 claims description 35
- 238000012545 processing Methods 0.000 claims description 7
- 230000000007 visual effect Effects 0.000 claims description 5
- 230000003247 decreasing effect Effects 0.000 claims description 2
- 238000002620 method output Methods 0.000 claims 1
- 238000013500 data storage Methods 0.000 description 34
- 230000008859 change Effects 0.000 description 21
- 238000012544 monitoring process Methods 0.000 description 10
- 230000003111 delayed effect Effects 0.000 description 7
- 230000004048 modification Effects 0.000 description 6
- 238000012986 modification Methods 0.000 description 6
- 238000004891 communication Methods 0.000 description 4
- 238000001514 detection method Methods 0.000 description 4
- 238000010586 diagram Methods 0.000 description 4
- 230000006870 function Effects 0.000 description 3
- 230000004044 response Effects 0.000 description 3
- 230000001133 acceleration Effects 0.000 description 2
- 230000004075 alteration Effects 0.000 description 2
- 230000007423 decrease Effects 0.000 description 2
- 239000011521 glass Substances 0.000 description 2
- 208000004350 Strabismus Diseases 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 230000003044 adaptive effect Effects 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 230000015556 catabolic process Effects 0.000 description 1
- 238000006731 degradation reaction Methods 0.000 description 1
- 230000001934 delay Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 230000005236 sound signal Effects 0.000 description 1
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/005—Handover processes
- B60W60/0053—Handover processes from vehicle to occupant
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/182—Selecting between different operative modes, e.g. comfort and performance modes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/08—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to drivers or passengers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/082—Selecting or switching between different modes of propelling
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/005—Handover processes
- B60W60/0059—Estimation of the risk associated with autonomous or manual driving, e.g. situation too complex, sensor failure or driver incapacity
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/59—Context or environment of the image inside of a vehicle, e.g. relating to seat occupancy, driver state or inner lighting conditions
- G06V20/597—Recognising the driver's state or behaviour, e.g. attention or drowsiness
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V40/00—Recognition of biometric, human-related or animal-related patterns in image or video data
- G06V40/10—Human or animal bodies, e.g. vehicle occupants or pedestrians; Body parts, e.g. hands
- G06V40/18—Eye characteristics, e.g. of the iris
- G06V40/193—Preprocessing; Feature extraction
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/08—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to drivers or passengers
- B60W2040/0818—Inactivity or incapacity of driver
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W2050/0001—Details of the control system
- B60W2050/0002—Automatic control, details of type of controller or control system architecture
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W2050/143—Alarm means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W2050/146—Display means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2420/00—Indexing codes relating to the type of sensors based on the principle of their operation
- B60W2420/40—Photo, light or radio wave sensitive means, e.g. infrared sensors
- B60W2420/403—Image sensing, e.g. optical camera
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/221—Physiology, e.g. weight, heartbeat, health or special needs
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/26—Incapacity
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2555/00—Input parameters relating to exterior conditions, not covered by groups B60W2552/00, B60W2554/00
- B60W2555/20—Ambient conditions, e.g. wind or rain
Landscapes
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Human Computer Interaction (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Multimedia (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Health & Medical Sciences (AREA)
- General Health & Medical Sciences (AREA)
- Ophthalmology & Optometry (AREA)
- Mathematical Physics (AREA)
- Traffic Control Systems (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Aviation & Aerospace Engineering (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
Abstract
一种驾驶模式切换控制装置(6),输出用于从自动驾驶模式向手动驾驶模式切换的信号,其具备:获取部(611),获取通过照度传感器(17)测量出的表示照度的传感数据并存储于存储部(631);判定部(613),根据传感数据,在为了实施切换而预先设定的期间,判定车辆的行进方向上环境是否满足适于切换驾驶模式的预定条件;信号输出部(615),在判定为车辆的行进方向上环境满足预定条件时,输出用于实施切换的信号。
Description
技术领域
本发明涉及一种输出用于将车辆的驾驶模式从自动驾驶模式向手动驾驶模式切换的信号的驾驶模式切换控制装置、系统、方法以及程序。
背景技术
近年来,作为车辆的驾驶模式,除了根据驾驶者的驾驶操作而使车辆行驶的手动驾驶模式以外,还进行了不基于与驾驶者的驾驶操作而沿着预先设定的路径使车辆行驶的自动驾驶模式的开发。自动驾驶模式例如能够基于利用了GPS(Global PositioningSystem:全球定位系统)的导航系统的信息、通过路车间通信获取的交通信息、监视周边的人或车辆的位置和运动的周边监视系统的信息,通过控制动力单元或转向装置、制动器等来进行车辆的自动驾驶(例如参照专利文献1)。
通过这样的自动驾驶模式,可以期待减轻驾驶者的驾驶操作的负担或缓和交通堵塞等的效果。
例如,高速公路配备有路车间通信、没有信号灯、没有行人、车道可靠地设置在一侧,驾驶操作的大部分是比较单调的,因此被认为是适于以自动驾驶模式进行驾驶的区间。然而,在未配备路车间通信、两侧仅一个车道、车道消失这样的一般道路上,以自动驾驶模式进行驾驶仍然困难。
因此,即使在高速公路上以自动驾驶模式进行驾驶,在驶出高速公路时,需要在到达一般道路之前,从自动驾驶模式向手动驾驶模式切换。
例如,根据行驶计划,在车辆以自动驾驶模式在高速公路上行驶时,在车辆一侧,可以始终掌握从当前位置到高速公路的出口以及一般道路的距离,因此也能够根据当前的速度推定出从高速公路出来、到达一般道路的所需时间。然后,例如,在到达一般道路之前的时间为60秒的时间点,输出“即将进入一般道路。将在60秒后切换为手动驾驶模式。请在此之前完成手动驾驶的准备”这样的语音播报。另外,从汽车导航系统画面、平板画面、仪表画面等画面进行“还剩60秒”、“还剩59秒”……这样的倒计时显示。
另一方面,即使在以自动驾驶模式在高速公路上行驶时,例如也有可能由于雾或大雨这样的恶劣天气,车辆的外部传感器无法正常地动作,导致无法继续自动驾驶模式。在这样的情况下,根据车辆,判断为无法继续自动驾驶模式,输出由于“由于恶劣天气,无法继续自动驾驶模式,将在60秒后切换为手动驾驶模式。请在此之前完成手动驾驶的准备”这样的语音播报。在该情况下也是同样,通常从汽车导航系统画面、平板画面、仪表画面等画面进行“还剩60秒”、“还剩59秒”……这样的倒计时显示。
或者,有时也有可能驾驶者自身希望从自动驾驶模式向手动驾驶模式切换。
专利文献1:日本特开2015-141053号公报
发明内容
用于从自动驾驶模式向手动驾驶模式切换的准备时间由汽车制造商等分别适当地设定,上述的60秒是一个例子,并非进行限定,总之,在经过了准备时间的时间点,进行从自动驾驶模式向手动驾驶模式的切换。
然而,不能保证经过了准备时间的时间点一定处于适于切换的状况。
例如,假设在经过了准备时间的时间点,车辆正好来到隧道的入口的情况。或者,也可以是隧道的出口。
通常,在进入隧道时,由于突然变暗,驾驶者在一瞬间难以看到前方。相反,在从隧道内行驶的状态从隧道中出来时,由于突然变亮,驾驶者会感到刺眼,在一瞬间难以看到前方。
像这样,由于隧道的入口或出口的视野状态急剧恶化,因此作为将驾驶模式从自动驾驶模式向手动驾驶模式切换的期间是最差的状态,相反,存在可能提高危险性这样的问题。
本发明是鉴于这样的情况而完成的,其目的在于,提供一种驾驶模式切换控制装置、系统、方法、程序,能够在成为实施从自动驾驶模式向手动驾驶模式的切换的期间的情况下,如果是适于实施切换的状况则实施切换,如果不是适当的状况则将切换的实施延后。
为了实现上述的目的,在本发明中,采用以下的措施。
即,本发明的第一方式为,一种驾驶模式切换控制装置,输出用于将车辆的驾驶模式从自动驾驶模式向手动驾驶模式切换的信号,其中,所述驾驶模式切换控制装置具备:获取部,获取通过设置于所述车辆的照度传感器测量出的表示所述车辆的行进方向上照度的传感数据并存储于存储部;判定部,根据存储于所述存储部的所述传感数据,在为了实施所述切换而预先设定的期间,判定所述车辆的行进方向上环境是否满足适于切换所述驾驶模式的预定条件;以及信号输出部,在通过所述判定部判定为所述车辆的行进方向上环境满足所述预定条件时,输出用于实施所述切换的信号。
另外,本发明的第二方式为,在第一方式的驾驶模式切换控制装置中,所述判定部根据在所述期间存储于所述存储部的所述传感数据,将所述照度的变化率与预先设定的第一阈值进行比较,在所述照度的变化率超过所述第一阈值时,判定为所述车辆的行进方向上环境不满足所述预定条件。
此外,本发明的第三方式为,在第一或第二方式的驾驶模式切换控制装置中,在通过所述判定部判定为所述车辆的行进方向上环境不满足所述预定条件时,所述信号输出部向所述判定部输出用于再次进行所述判定部的判定的信号。
另一方面,本发明的第四方式为,一种驾驶模式切换控制装置,输出用于将车辆的驾驶模式从自动驾驶模式向手动驾驶模式切换的信号,其中,所述驾驶模式切换控制装置具备:获取部,从用于拍摄所述车辆的驾驶者的拍摄部获取拍摄所述驾驶者的拍摄数据并存储于存储部;判定部,在为了实施所述切换而预先设定的期间,判定基于存储于所述存储部的所述拍摄数据而识别出的所述驾驶者的眼睛状态是否满足适于切换所述驾驶模式的预定条件;以及信号输出部,在通过所述判定部判定为所述驾驶者的眼睛状态满足所述预定条件时,输出用于实施所述切换的信号。
本发明的第五方式为,在第四方式的驾驶模式切换控制装置中,所述判定部将根据在所述期间拍摄到的拍摄数据而识别出的所述驾驶者的第一眼睛尺寸与根据在所述期间之前拍摄到的拍摄数据而识别出的所述驾驶者的第二眼睛尺寸进行比较,在所述第一眼睛尺寸相比所述第二眼睛尺寸在目视能力降低的方向上变化了预定量以上时,判定为所述驾驶者的眼睛状态不满足所述预定条件。
本发明的第六方式为,在第四方式的驾驶模式切换控制装置中,所述判定部将根据在所述期间拍摄到的拍摄数据而识别出的所述驾驶者的眼睛附近的第一光量与根据在所述期间之前拍摄到的拍摄数据而识别出的所述驾驶者的眼睛附近的第二光量进行比较,在所述第一光量比所述第二光量变化了预定量以上时,判定为所述驾驶者的眼睛状态不满足所述预定条件。
本发明的第七方式为,在第五或第六方式的驾驶模式切换控制装置中,在通过所述判定部判定为所述驾驶者的眼睛状态不满足所述预定条件时,所述信号输出部向所述判定部输出用于再次进行所述判定部的判定的信号。
本发明的第八方式为,一种驾驶模式切换控制系统,输出用于将车辆的驾驶模式从自动驾驶模式向手动驾驶模式切换的信号,其中,所述驾驶模式切换控制系统具备:照度传感器,设置于所述车辆;获取部,获取通过所述照度传感器测量出的表示所述车辆的行进方向上照度的传感数据并存储于存储部;判定部,根据存储于所述存储部的所述传感数据,在为了实施所述切换而预先设定的期间,判定所述车辆的行进后方的环境是否满足适于切换所述驾驶模式的预定条件;以及信号输出部,在通过所述判定部判定为所述车辆的行进方向上环境满足所述预定条件时,输出用于实施所述切换的信号。
本发明的第九方式为,一种驾驶模式切换控制系统,输出用于将车辆的驾驶模式从自动驾驶模式向手动驾驶模式切换的信号,其中,所述驾驶模式切换控制系统具备:拍摄部,用于拍摄所述车辆的驾驶者;获取部,从所述拍摄部获取拍摄所述驾驶者的拍摄数据并存储于存储部;判定部,在为了实施所述切换而预先设定的期间,判定基于存储于所述存储部的所述拍摄数据而识别出的所述驾驶者的眼睛状态是否满足适于切换所述驾驶模式的预定条件;以及信号输出部,在通过所述判定部判定为所述驾驶者的眼睛状态满足所述预定条件时,输出用于实施所述切换的信号。
本发明的第十方式为,一种驾驶模式切换控制方法,输出用于将车辆的驾驶模式从自动驾驶模式向手动驾驶模式切换的信号,其中,设置于所述车辆的照度传感器测量所述车辆的行进方向的照度,处理器进行以下处理:获取通过所述照度传感器测量出的表示照度的传感数据并存储于存储部;根据存储于所述存储部的所述传感数据,在为了实施所述切换而预先设定的期间,判定所述车辆的行进方向上环境是否满足适于切换所述驾驶模式的预定条件;以及在判定为所述车辆的行进方向上环境满足所述预定条件时,输出用于实施所述切换的信号。
本发明的第十一方式为,一种驾驶模式切换控制方法,输出用于将车辆的驾驶模式从自动驾驶模式向手动驾驶模式切换的信号,其中,设置于所述车辆的拍摄部拍摄所述车辆的驾驶者,处理器进行以下处理:获取通过所述拍摄部拍摄所述驾驶者的拍摄数据并存储于存储部;在为了实施所述切换而预先设定的期间,判定基于存储于所述存储部的所述拍摄数据而识别出的所述驾驶者的眼睛状态是否满足适于切换所述驾驶模式的预定条件;以及在判定为所述驾驶者的眼睛状态满足所述预定条件时,输出用于实施所述切换的信号。
本发明的第十二方式为,一种程序,使计算机作为第一至第七方式中的任一方式的驾驶模式切换控制装置具备的各部分而发挥功能。
因此,根据本发明的第一、第八、第十、第十二方式,即使在成为从自动驾驶模式向手动驾驶模式切换的期间的情况下,根据通过照度传感器测量出的照度,仅在判定为满足适于切换的预定条件时实施切换,因此能够有助于实现更安全的切换。
特别是,根据本发明的第二方式,在照度的变化率超过预先设定的第一阈值时,判定为不是适于实施切换的状况。
此外,根据本发明的第三、第七方式,若判定为不满足适于切换的预定条件,则通过对判定部再次进行判定,能够将切换的实施延后。因此,能够避免在危险的状况下实施向手动驾驶模式的切换,能够有助于实现更安全的切换。
此外,根据本发明的第四、第九、第十一方式,即使在成为从自动驾驶模式向手动驾驶模式切换的期间的情况下,根据通过拍摄部测量出的拍摄数据,仅在判定为满足适于切换的预定条件时实施切换,因此能够有助于实现更安全的切换。
特别是,根据本发明的第五方式,在拍摄数据中,根据在实施切换的期间拍摄到的拍摄数据,驾驶者的眼睛的尺寸相比在该期间之前拍摄到的拍摄数据所显示的驾驶者的眼睛的尺寸,在目视能力降低的方向上变化了预定量以上(例如,驾驶者感到刺眼,驾驶者把眼睛眯起来)时,判定为不满足预定条件,能够将切换的实施延后。
另一方面,根据本发明的第六方式,将在实施切换的期间和在此之前的期间根据拍摄数据获取的驾驶者的眼睛附近的光量进行比较,在变化量为预定量以上时,判定为不是适于实施切换的状况,能够将切换的实施延后。
附图说明
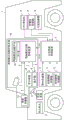
图1是示出具备本发明的一个实施方式涉及的驾驶模式切换控制系统的自动驾驶控制系统的整体结构例的图。
图2是示出本发明的一个实施方式涉及的驾驶模式切换控制系统的功能结构例的框图。
图3是示出本发明的一个实施方式涉及的驾驶模式切换控制系统的动作例的流程图(1/3)。
图4是示出本发明的一个实施方式涉及的驾驶模式切换控制系统的动作例的流程图(2/3)。
图5是示出本发明的一个实施方式涉及的驾驶模式切换控制系统的动作例的流程图(3/3)。
具体实施方式
以下,参照附图对本发明涉及的实施方式进行说明。
(结构)
图1是示出具备本发明的一个实施方式涉及的驾驶模式切换控制系统10的自动驾驶控制系统的整体结构例的图。该自动驾驶控制系统搭载于轿车等车辆1。
作为基本设备,车辆1具备包括动力源以及变速装置的动力单元2、装备有方向盘4的转向装置3,此外作为驾驶模式还具备手动驾驶模式和自动驾驶模式。作为动力源,使用发动机或电机,或者这两者。
手动驾驶模式例如是以驾驶者(以下也称为“司机”)手动进行的驾驶操作为主体使车辆1行驶的模式。在手动驾驶模式中,例如包括仅根据驾驶者的驾驶操作使车辆行驶的动作模式、在以驾驶者的驾驶操作为主体的同时进行辅助驾驶者的驾驶操作的驾驶操作辅助控制的动作模式。
驾驶操作辅助控制例如在车辆1的弯道行驶时根据弯道的曲率以使驾驶者的转向成为适当的转向量的方式对转向转矩进行辅助。另外,在驾驶操作辅助控制中,还包括辅助驾驶者的加速操作(例如加速踏板的操作)或制动操作(例如制动踏板的操作)的控制、手动转向(转向的手动驾驶)以及手动速度调整(速度调整的手动驾驶)。手动转向以驾驶者的方向盘4的操作为主体进行车辆1的转向。手动速度调整以驾驶者的加速操作或制动操作为主体进行车辆的速度调整。
需要说明的是,在驾驶操作辅助控制中,不包括强制地介入驾驶者的驾驶操作而使车辆1自动行驶的控制。即,在手动驾驶模式中,在预先设定的容许范围内使驾驶者的驾驶操作反映到车辆的行驶中,但不包括在一定条件(例如车辆的车道脱离等)下强制地介入车辆的行驶中的控制。
另一方面,自动驾驶模式例如是实现沿着车辆1行驶的道路自动地使车辆1行驶的驾驶状态的模式。在自动驾驶模式中,例如包括驾驶者不进行驾驶操作而向预先设定的目的地自动地使车辆1行驶的驾驶状态。自动驾驶模式不一定需要自动地进行车辆1的全部的控制,在预先设定的容许范围内将驾驶者的驾驶操作反映到车辆1的行驶中的驾驶状态也包括在自动驾驶模式中。即,在自动驾驶模式中,包括在预先设定的容许范围内使驾驶者的驾驶操作反映到车辆1的行驶中,但在一定条件下强制地介入车辆的行驶中的控制。
在图1中,5表示用于实施根据上述自动驾驶模式的驾驶控制的自动驾驶控制装置。自动驾驶控制装置5从转向传感器11、加速踏板传感器12、制动踏板传感器13、GPS接收机14、陀螺仪传感器15以及车速传感器16分别获取传感数据。然后,根据这些传感数据、由未图示的导航系统生成的路径信息、通过路车间通信获取的交通信息、通过监视周边的人或车辆的位置和动作的周边监视系统而得到的信息,来自动控制车辆1的行驶。
在自动控制中,例如有自动转向(转向的自动驾驶)和自动速度调整(速度的自动驾驶)。自动转向是自动地控制转向装置3的驾驶状态。在自动转向中包括LKA(LaneKeeping Assist:车道保持辅助)。LKA例如即使在驾驶者不进行转向操作的情况下,也以车辆1不脱离行驶车道的方式自动地控制转向装置3。需要说明的是,即使在LKA的执行中,也可以在车辆1不脱离行驶车道的范围(容许范围)内将驾驶者的转向操作反映到车辆的转向中。需要说明的是,自动转向不局限于LKA。
自动速度调整是自动地控制车辆1的速度的驾驶状态。在自动速度调整中包括ACC(Adaptive Cruise Control:自适应巡航控制)。所谓ACC,是指例如在车辆1的前方不存在前车时进行以预先设定的设定速度使车辆1定速行驶的定速控制,在车辆1的前方存在前车时进行根据与前车的车间距离来调整车辆1的车速的追随控制。自动驾驶控制装置5即使在ACC的执行中,也能够根据驾驶者的制动操作(例如制动踏板的操作)来使车辆1减速。另外,即使在ACC的执行中,自动驾驶控制装置5也能够根据驾驶者的加速操作(例如加速踏板的操作)来使车辆1加速到预先设定的最大容许速度(例如在行驶中的道路上法律规定的最高速度)。需要说明的是,自动速度调整不局限于ACC,也包括CC(Cruise Control:定速控制)等。
在本实施方式中,作为用于进行自动驾驶模式与手动驾驶模式之间的切换控制的装置,自动驾驶控制系统具备驾驶模式切换控制系统10。
本实施方式涉及的驾驶模式切换控制系统10是实现驾驶模式切换控制方法,其特征在于从自动驾驶模式向手动驾驶模式切换时的控制。因此,以下,对从自动驾驶模式向手动驾驶模式切换时的控制进行说明,省略对从手动驾驶模式向自动驾驶模式切换时的控制的说明。
驾驶模式切换控制系统10具备驾驶模式切换控制装置6、驾驶模式切换开关18、作为监视传感器的驾驶者摄像机7以及照度传感器17、作为通知装置的显示画面8以及扬声器9。
驾驶者摄像机7例如设置在仪表板上那样的驾驶者的正面侧的位置,在行驶中连续地拍摄驾驶者,将该影像信号b向驾驶模式切换控制装置6输出。
显示画面8显示从驾驶模式切换控制装置6输出的消息的文字信息c。显示画面8例如可以相当于车辆1的仪表或搭载于车辆1的汽车导航系统的显示画面,但并不一定局限于此,也可以是搭载于车辆1的驾驶监视器等的监视画面。
扬声器9输出从驾驶模式切换控制装置6输出的消息的语音信息d。
照度传感器17设置在前玻璃的近前附近,在行驶中连续地检测车辆1的前方的照度,将检测信号e向驾驶模式切换控制装置6输出。
驾驶模式切换开关18是用于在驾驶者请求切换当前的驾驶模式时按压的开关。当驾驶模式切换开关18被按压时,驾驶模式切换开关18向驾驶模式切换控制装置6输出驾驶切换请求信号A。在驾驶切换请求信号A中,例如像60秒后那样,也伴随有表示实施切换的定时的定时信息t。
驾驶模式切换控制装置6当接收到驾驶切换请求信号A以及定时信息t时,在由定时信息t指定的时间后,为了实施驾驶模式的从自动驾驶模式向手动驾驶模式的切换,开始必要的处理动作。需要说明的是,驾驶切换请求信号A以及定时信息t,不仅通过驾驶者按压驾驶模式切换开关18而被输出,如后所述,有时也从自动驾驶控制装置5自动地输出。
当驾驶切换请求信号A以及定时信息t从驾驶模式切换开关18输出,或者从自动驾驶控制装置5输出时,通过定时信息t指定的时间并不局限于60秒,也能够通过驾驶者从预先设定的值中选择,或者通过驾驶者任意地设定来设定。自动驾驶控制装置5也可以根据各种情况来指定不同的时间,例如,在由于从高速公路驶出到一般道路上而切换为手动驾驶模式的情况下为60秒,在由于天气恶劣而切换的情况下为30秒,在由于紧急事态而切换的情况下为4秒。
图2是示出本发明的一个实施方式涉及的驾驶模式切换控制系统10的功能结构例的框图。
驾驶模式切换控制装置6是统一控制驾驶模式的切换的装置,具备控制单元61、输入输出接口单元62以及存储单元63。
输入输出接口单元62接收从驾驶模式切换开关18或自动驾驶控制装置5输出的驾驶切换请求信号A以及定时信息t,向控制单元61输出。如上所述,驾驶模式切换开关18在被驾驶者按压时,输出驾驶切换请求信号A以及定时信息t。
输入输出接口单元62接收驾驶切换请求信号A以及定时信息t,向控制单元61输出。
输入输出接口单元62还接收从驾驶者摄像机7输出的影像信号b并转换为数字数据(驾驶者监视影像数据)B,将数字数据B向控制单元61输出。另外,接收从照度传感器17输出的检测信号e并转换为传感数据E,将传感数据E向控制单元61输出。另一方面,将从控制单元61输出的显示数据C转换为显示信号c,向显示画面8输出。另外,将从控制单元61输出的语音播报数据D转换为语音信号d,并向扬声器9输出。此外,还将从控制单元61输出的驾驶模式切换控制信号F向自动驾驶控制装置5输出。
作为存储介质,存储单元63例如使用SSD(Solid State Drive:固态驱动器)或HDD(Hard Disk Drive:硬盘驱动器)等能够随时写入以及读出的非易失性存储器,作为用于实施本实施方式而使用的存储区域,具备影像数据存储部631、照度数据存储部632、显示数据存储部633以及语音播报数据存储部634。
控制单元61具有构成计算机的CPU(Central Processing Unit:中央处理器)以及程序存储器,作为用于实施本实施方式所需的控制功能,具备驾驶模式切换控制开始部610、影像数据获取部611、照度数据获取部612、切换判定部613、信号输出部615以及通知控制部614。需要说明的是,这些控制功能均通过使上述CPU执行存储于上述程序存储器的程序来实现。
驾驶模式切换控制开始部610在接收到从输入输出接口单元62输出的驾驶切换请求信号A以及定时信息t时,生成起动信号G,将起动信号G和定时信息t一起向切换判定部613输出。
影像数据获取部611将从输入输出接口单元62输出的数字数据(驾驶者监视影像数据)B存储于影像数据存储部631。由此,在影像数据存储部631中存储有表示驾驶者的情况的驾驶者监视影像数据B。
照度数据获取部612将从输入输出接口单元62输出的传感数据E存储于照度数据存储部632。由此,在照度数据存储部632中存储有表示车辆1的前方的照度的传感数据E。
若从驾驶模式切换控制开始部610输出起动信号G以及定时信息t,则切换判定部613根据存储在影像数据存储部631中的驾驶者监视影像数据B和存储于照度数据存储部632的传感数据E,判定在定时信息t所示的时间后是否应该实施切换。
即,切换判定部613从接收到起动信号G的时间点开始到经过由定时信息t指定的期间为止,使用存储于照度数据存储部632中的传感数据E来运算照度的变化率(例如,在5秒期间内照度率变化了多少)。例如,在车辆1进入隧道时,在隧道的入口附近,由于突然变暗,因此照度的变化率变大。另外,在车辆1从隧道中出来时,在隧道的出口附近,由于突然变亮,因此在该情况下,照度的变化率也同样变大。像这样,照度急剧变化,推定为相当于车辆1进入隧道的情况或者从隧道中出来的情况,在照度的变化率超过预先设定的照度阈值时,即使成为由定时信息t指定的定时,也判定为不适于实施切换,将拒绝信号和定时信息t一起向信号输出部615以及通知控制部614输出。
切换判定部613还从接收到起动信号G的时间点开始到经过由定时信息t指定的时间为止,使用存储于影像数据存储部631的驾驶者监视影像数据B,在相比接收到起动信号G的时间点驾驶者的眼睛的尺寸变小,即在目视能力降低的方向上变化了预定量以上时,或者相比接收到起动信号G的时间点驾驶者的眼睛附近的光量变化了预定量以上时,即使成为由定时信息t指定的定时,也判定为不适于实施切换,将拒绝信号和定时信息t一起向信号输出部615以及通知控制部614输出。
驾驶者的眼睛的尺寸变小是因为驾驶者感到刺眼而把眼睛眯起来,因此被认定为驾驶者难以看到前方的状况。切换判定部613判定为在这样的状况下不适于实施切换。另外,驾驶者的眼睛附近的光量的变化率较大是指相当于突然变亮或者突然变暗的情况。因此,切换判定部613判定为在这样的状况下也不适于实施切换。
需要说明的是,在上述中,对切换判定部613根据驾驶者监视影像数据B和传感数据E两者来判定是否是适于实施切换的状况的例子进行了说明,但切换判定部613也可以根据驾驶者监视影像数据B或者传感数据E中的任意一方来实施这样的判定,或者也可以通过优先处理任意一个判定结果来实施。
切换判定部613在上述以外的情况下,即,在输出拒绝信号以外的情况下,判定为是适于实施切换的状况,当经过由定时信息t指定的时间时,向信号输出部615以及通知控制部614输出允许信号。
在从切换判定部613输出了允许信号时,信号输出部615向输入输出接口单元62输出用于将驾驶模式从自动驾驶模式切换为手动驾驶模式的驾驶模式切换控制信号F。如上所述,输入输出接口单元62向自动驾驶控制装置5输出驾驶模式切换控制信号F。自动驾驶控制装置5当被输出驾驶模式切换控制信号F时,将驾驶模式从自动驾驶模式向手动驾驶模式切换。
另一方面,在从切换判定部613输出了拒绝信号和定时信息t时,信号输出部615对切换判定部613一起输出再判定指示信号H和定时信息t。
当从信号输出部615输出了再判定指示信号H和定时信息t时,切换判定部613使用该定时信息t,再次执行上述那样的判定处理。然后,根据该判定结果,将允许信号,或者拒绝信号以及定时信息t向信号输出部615输出。
通知控制部614根据从切换判定部613输出的信号,从显示数据存储部633获取适当的显示数据C,从语音播报数据存储部634获取适当的语音播报数据D,向输入输出接口单元62输出。
显示数据存储部633存储有各种显示数据C。通过在显示数据存储部633中追加新的显示数据C,或者更新存储于显示数据存储部633的已有的显示数据C,能够定义各种显示数据。
语音播报数据存储部634存储有各种语音播报数据D。通过在语音播报数据存储部634中追加新的语音播报数据D,或者更新存储于语音播报数据存储部634的已有的语音播报数据D,能够定义各种语音播报数据。
在从切换判定部613输出了允许信号时,通知控制部614从显示数据存储部633获取用于从显示画面8显示“将向自动驾驶模式进行切换”的显示数据C,从语音播报数据存储部634获取用于从扬声器9输出“将向自动驾驶模式进行切换”的语音播报数据D,向输入输出接口单元62输出。
另一方面,在从切换判定部613输出了拒绝信号以及定时信息t时,通知控制部614从显示数据存储部633获取用于从显示画面8显示“无法进行向自动驾驶模式的切换。将在t秒后进行重试”的显示数据C,从语音播报数据存储部634获取用于从扬声器9输出“无法进行向自动驾驶模式的切换。将在t秒后进行重试”的语音播报数据D,向输入输出接口单元62输出。
输入输出接口单元62将从通知控制部614输出的显示数据C转换为显示信号c,向显示画面8输出。另外,将从通知控制部614输出的语音播报数据D转换为语音信号d,并向扬声器9输出。由此,从显示画面8进行由显示数据C决定的显示,从扬声器9输出由语音播报数据D决定的语音播报。
像这样,驾驶模式切换控制系统10,判定经过了由定时信息t指定的时间的时间点的状况是否是适于实施切换的状况,仅在判定为是适当的状况的情况下,准许实施从自动驾驶模式向手动驾驶模式的切换,在判定为不是适当的状况的情况下,通过重复进行基于切换判定部613的判定,在成为适当的状况之前,将从自动驾驶模式向手动驾驶模式的切换的实施延后。
(动作)
接着,对如上构成的本发明的一个实施方式涉及的驾驶模式切换控制系统10的动作进行说明。
图3至图5是示出本发明的一个实施方式涉及的驾驶模式切换控制系统10的动作例的流程图。
车辆1通过自动驾驶控制装置5以自动驾驶模式进行驾驶。在以自动驾驶模式进行驾驶的期间,在驾驶模式切换控制系统10中,例如通过设置在仪表板上那样的驾驶者的正面侧的位置的驾驶者摄像机7,在行驶中连续地拍摄驾驶者,将影像信号b向驾驶模式切换控制装置6输出。该影像信号b通过输入输出接口单元62转换为数字数据(驾驶者监视影像数据)B,通过影像数据获取部611存储于影像数据存储部631(S1)。
另外,在驾驶模式切换控制系统10中,通过设置在前玻璃的近前附近的照度传感器17,在行驶中连续地检测车辆1的前方的照度,将检测信号e向驾驶模式切换控制装置6输出。该检测信号e通过输入输出接口单元62转换为传感数据E,通过照度数据获取部612存储于照度数据存储部632(S2)。
为了实施将驾驶模式从自动驾驶模式向手动驾驶模式的切换,需要向驾驶模式切换控制系统10输入驾驶切换请求信号A以及定时信息t(S3)。驾驶切换请求信号A以及定时信息t通过由驾驶者按压驾驶模式切换开关18而从驾驶模式切换开关18或者从自动驾驶控制装置5输出。
驾驶切换请求信号A以及定时信息t通过驾驶模式切换控制开始部610接收,在驾驶模式切换控制开始部610中,相应地生成起动信号G,将起动信号G和定时信息t一起向切换判定部613输出(S4)。
在切换判定部613中,根据接收起动信号G以及定时信息t,根据存储于影像数据存储部631的驾驶者监视影像数据B和存储于照度数据存储部632的传感数据E,判定是否应该在定时信息t所示的时间后实施切换(S5)。
具体而言,在切换判定部613中,从接收到起动信号G的时间点开始到经过由定时信息t指定的时间为止,使用存储于照度数据存储部632的传感数据E,运算照度的变化率。例如,在像隧道的出入口附近那样照度急剧变化的状况下不适于实施切换,因此在照度的变化率超过预先设定的照度阈值时,即使成为由定时信息t指定的定时,也判定为不适于实施切换(S6:否),将拒绝信号和定时信息t一起向信号输出部615以及通知控制部614输出(S12)。
在切换判定部613中,还在步骤S6中的照度的变化率的判定中,在判定为不适于实施切换时(S6:是),从接收到起动信号G的时间点开始到经过由定时信息t指定的时间为止,使用存储于影像数据存储部631中的驾驶者监视影像数据B进行判定(S7)。
然后,在步骤S7中的判定的结果为,在相比接收到起动信号G的时间点驾驶者的眼睛的尺寸变小,即在目视能力降低的方向上变化了预定量以上时,或者,在相比接收到起动信号G的时间点驾驶者的眼睛附近的光量变化了预定量以上时,即使成为由定时信息t指定的定时,也判定为不适于实施切换(S8:否),将拒绝信号和定时信息t一起向信号输出部615以及通知控制部614输出(S12)。
驾驶者的眼睛眯起来是因为驾驶者感到刺眼而把眼睛眯起来,因此被认定为驾驶者难以看到前方的状况。另外,驾驶者的眼睛附近的光量的变化率较大是因为突然变亮或者突然变暗,因此同样地被认定为驾驶者难以看到前方。
需要说明的是,在上述中,为了便于说明,按照先实施基于传感数据E的判定(S5、S6),之后实施基于驾驶者监视影像数据B的判定(S7、S8)的顺序进行了说明,但顺序可以相反,也可以同时实施。或者,也可以根据驾驶者监视影像数据B或传感数据E中的任意一方来判定可否,还可以优先处理任意一个判定结果。
另外,在进行了步骤S3以后的处理的情况下,步骤S1以及步骤S2的处理也与步骤S3以后的处理并行地始终进行。
在输出拒绝信号以外的情况下,切换判定部613判定为是适于实施切换的状况(S8:是),当经过由定时信息t指定的时间时,向信号输出部615以及通知控制部614输出允许信号(S9)。
在信号输出部615中,根据来自切换判定部613的允许信号,将用于将驾驶模式从自动驾驶模式切换为手动驾驶模式的驾驶模式切换控制信号F向输入输出接口单元62输出,进而从输入输出接口单元62向自动驾驶控制装置5输出(S10)。
与此同时,在通知控制部614中,根据来自切换判定部613的允许信号,从显示数据存储部633获取用于从显示画面8显示“将向自动驾驶模式进行切换”的显示数据C,从语音播报数据存储部634获取用于从扬声器9输出“将向自动驾驶模式进行切换”的语音播报数据D,向输入输出接口单元62输出。
相应地,从输入输出接口单元62向显示画面8输出显示数据C,并从显示画面8进行“将向自动驾驶模式进行切换”的显示。另外,从输入输出接口单元62向扬声器9输出语音播报数据D,并从扬声器9输出“将向自动驾驶模式进行切换”的语音播报。
在自动驾驶控制装置5中,根据驾驶模式切换控制信号F,将驾驶模式从自动驾驶模式向手动驾驶模式切换(S11)。
另一方面,在步骤S12中,在从切换判定部613输出了拒绝信号和定时信息t时,从信号输出部615向切换判定部613一起输出再判定指示信号H和定时信息t(S13)。
与此同时,在通知控制部614中,根据来自切换判定部613的拒绝信号以及定时信息t,从显示数据存储部633获取用于从显示画面8显示“无法进行向自动驾驶模式的切换。将在t秒后进行重试”的显示数据C,并且从语音播报数据存储部634获取用于从扬声器9输出“无法进行向自动驾驶模式的切换。将在t秒后进行重试”的语音播报数据D,向输入输出接口单元62输出。
相应地,从输入输出接口单元62向显示画面8输出显示数据C,从显示画面8进行“无法进行向自动驾驶模式的切换。将在t秒后进行重试”的显示。另外,从输入输出接口单元62向扬声器9输出语音播报数据D,从扬声器9输出“无法进行向自动驾驶模式的切换。将在t秒后进行重试”的语音播报。
在切换判定部613中,根据在步骤S13中输出的再判定指示H和定时信息t,使用该定时信息t,重复进行步骤S5以后的处理。
像这样,根据驾驶模式切换控制系统10,判定经过了由定时信息t指定的时间的时间点的状况是否是适于实施切换的状况。然后,仅在判定为是适当的状况的情况下,能够实施从自动驾驶模式向手动驾驶模式的切换。另一方面,在判定为不是适当的状况的情况下,通过重复进行基于切换判定部613的判定,在成为适当的状况之前,将从自动驾驶模式向手动驾驶模式的切换的实施延后。
如上所述,根据本实施方式,即使发出从自动驾驶模式向手动驾驶模式的切换的请求,也不会在指定的定时机械地实施切换,而是在预先设定的期间,判定是否是适于实施切换的状况,根据其结果,能够实施切换,或者将切换的实施延后。
由此,例如,像隧道的入口或出口那样,在不适于实时切换的状况下,能够通过原样继续进行自动驾驶而将切换的实施延后,因此能够避免在危险的状况下向手动驾驶模式切换的事态,从而能够有助于实现更安全的切换。
(变形例1)
在上述实施方式中,根据来自驾驶者摄像机7的驾驶者监视影像数据B、来自照度传感器17的传感数据E来判定车辆1是否到达了隧道的入口或出口。
然而,本发明也可以代替这些,或者在此基础上,在车辆1上设置前方摄像机,根据前方摄像机的拍摄结果,判定车辆1是否到达了隧道的入口或出口。
即,当从驾驶模式切换控制开始部610输出起动信号G以及定时信息t时,切换判定部613从该时间点开始对通过前方摄像机拍摄到的影像数据进行分析,在前方识别到隧道的入口或出口时,对信号输出部615输出拒绝信号以及定时信息t。
由此,与上述实施方式同样地,能够阻止在隧道的入口以及出口的切换的实施,将切换的实施延后,因此能够避免在隧道的入口以及出口这样的危险的状况下实施向手动驾驶模式的切换,因此,能够有助于实现更安全的切换。
(变形例2)
在上述实施方式中,根据来自驾驶者摄像机7的驾驶者监视影像数据B、来自照度传感器17的传感数据E来判定车辆1是否到达了隧道的入口或出口。另外,在上述变形例1中,代替这些,或者在此基础上,根据前方摄像机的拍摄结果,判定车辆1是否到达了隧道的入口或出口。
然而,本发明也可以代替这些,或者在此基础上,根据由搭载于车辆1的汽车导航系统提供的地图信息,判定车辆1是否到达了隧道的入口或出口。
即,当从驾驶模式切换控制开始部610输出起动信号G以及定时信息t时,切换判定部613通过参照由汽车导航系统提供的地图信息,掌握车辆1的位置。然后,在经过了由定时信息t指定的时间的时间点的位置有隧道的入口或出口时,对信号输出部615输出拒绝信号以及定时信息t。
由此,与上述实施方式以及变形例1同样地,能够阻止在隧道的入口以及出口的切换的实施,将切换延后,因此能够避免在隧道的入口以及出口这样的危险的状况下实施向手动驾驶模式的切换,因此,能够有助于实现更安全的切换。
以上,参照附图对用于实施本发明的最佳方式进行了说明,但本发明并不局限于该结构。在权利要求书的发明的技术思想的范畴内,只要是本领域的技术人员,则能够想到各种变更例以及修正例,应当理解,这些变更例以及修正例也属于本发明的技术范围。
上述实施方式的一部分或全部也可以如以下的附记那样记载,但并不局限于以下的内容。
(附记1)
一种驾驶模式切换控制装置,输出用于将车辆的驾驶模式从自动驾驶模式向手动驾驶模式切换的信号,所述驾驶模式切换控制装置具有处理器和存储器,所述存储器具备存储通过设置于所述车辆的照度传感器测量出的表示所述车辆的行进方向上照度的传感数据的存储部,所述处理器构成为,根据存储在所述存储部中的所述传感数据,在为了实施所述切换而预先设定的期间,判定所述车辆的行进方向上环境是否满足适于切换所述驾驶模式的预定条件,在判定为所述车辆的行进方向上环境满足所述预定条件时,输出用于实施所述切换的信号,所述判定包括以下判定:根据在所述期间存储于所述存储部的所述传感数据,将所述照度的变化率与预先设定的第一阈值进行比较,在所述照度的变化率超过所述第一阈值时,判定为所述车辆的行进方向上环境不满足所述预定条件。
(附记2)
一种驾驶模式切换控制装置,输出用于将车辆的驾驶模式从自动驾驶模式向手动驾驶模式切换的信号,所述驾驶模式切换控制装置具有处理器和存储器,所述存储器具有存储从用于拍摄所述车辆的驾驶者的拍摄部拍摄所述驾驶者的拍摄数据的存储部,所述处理器构成为,在为了实施所述切换而预先设定的期间,判定基于存储于所述存储部中的所述拍摄数据而识别出的所述驾驶者的眼睛状态是否满足适于切换所述驾驶模式的预定条件,在判定为所述驾驶者的眼睛状态满足所述预定条件时,输出用于实施所述切换的信号,所述判定包括以下判定:将根据在所述期间拍摄到的拍摄数据而识别出的所述驾驶者的眼睛附近的第一光量与根据在所述期间之前拍摄到的拍摄数据而识别出的所述驾驶者的眼睛附近的第二光量进行比较,在所述第一光量比所述第二光量变化了预定量以上时,判定为所述驾驶者的眼睛状态不满足所述预定条件。
(附记3)
一种驾驶模式切换控制系统,输出用于将车辆的驾驶模式从自动驾驶模式向手动驾驶模式切换的信号,所述驾驶模式切换控制系统具有设置于所述车辆的照度传感器、处理器和存储器,所述存储器具有存储表示通过照度传感器测量出的所述车辆的行进方向上照度的传感数据的存储部,所述处理器构成为,根据存储于所述存储部中的所述传感数据,在为了实施所述切换而预先设定的期间,判定所述车辆的行进后方的环境是否满足适于切换所述驾驶模式的预定条件,在判定为所述车辆的行进方向上环境满足所述预定条件时,输出用于实施所述切换的信号,所述判定包括以下判定:根据在所述期间存储于所述存储部的所述传感数据,将所述照度的变化率与预先设定的第一阈值进行比较,在所述照度的变化率超过所述第一阈值时,判定为所述车辆的行进方向上环境不满足所述预定条件。
(附记4)
一种驾驶模式切换控制系统,输出用于将车辆的驾驶模式从自动驾驶模式向手动驾驶模式切换的信号,所述驾驶模式切换控制系统具有用于拍摄所述车辆的驾驶者的拍摄部、处理器和存储器,所述存储器具有存储从所述拍摄部拍摄所述驾驶者的拍摄数据的存储部,所述处理器构成为,在为了实施所述切换而预先设定的期间,判定基于存储于所述存储部中的所述拍摄数据而识别出的所述驾驶者的眼睛状态是否满足适于切换所述驾驶模式的预定条件,在判定为所述驾驶者的眼睛状态满足所述预定条件时,输出用于实施所述切换的信号,所述判定包括以下判定:将根据在所述期间拍摄到的拍摄数据而识别出的所述驾驶者的眼睛附近的第一光量与根据在所述期间之前拍摄到的拍摄数据而识别出的所述驾驶者的眼睛附近的第二光量进行比较,在所述第一光量比所述第二光量变化了预定量以上时,判定为所述驾驶者的眼睛状态不满足所述预定条件。
(附记5)
一种驾驶模式切换控制方法,输出用于将车辆的驾驶模式从自动驾驶模式向手动驾驶模式切换的信号,通过设置于所述车辆的照度传感器,测量所述车辆的行进方向上照度,使用处理器,将表示通过所述照度传感器测量出的照度的传感数据存储于存储器,使用所述处理器,根据存储于所述存储器中的所述传感数据,在为了实施所述切换而预先设定的期间,判定所述车辆的行进方向上环境是否满足适于切换所述驾驶模式的预定条件,在判定为所述车辆的行进方向上环境满足所述预定条件时,使用所述处理器,输出用于实施所述切换的信号,所述判定包括以下判定:根据在所述期间存储于所述存储部的所述传感数据,将所述照度的变化率与预先设定的第一阈值进行比较,在所述照度的变化率超过所述第一阈值时,判定为所述车辆的行进方向上环境不满足所述预定条件。
(附记6)
一种驾驶模式切换控制方法,输出用于将车辆的驾驶模式从自动驾驶模式向手动驾驶模式切换的信号,通过设置于所述车辆的拍摄部来拍摄所述驾驶者,使用处理器,将通过所述拍摄部拍摄所述驾驶者的拍摄数据存储于存储器,使用所述处理器,在为了实施所述切换而预先设定的期间,判定基于存储于所述存储器的所述拍摄数据而识别出的所述驾驶者的眼睛状态是否满足适于切换所述驾驶模式的预定条件,在判定为所述驾驶者的眼睛状态满足所述预定条件时,使用所述处理器,输出用于实施所述切换的信号,所述判定包括以下判定:将根据在所述期间拍摄到的拍摄数据而识别出的所述驾驶者的眼睛附近的第一光量与根据在所述期间之前拍摄到的拍摄数据而识别出的所述驾驶者的眼睛附近的第二光量进行比较,在所述第一光量比所述第二光量变化了预定量以上时,判定为所述驾驶者的眼睛状态不满足所述预定条件。
Claims (6)
1.一种驾驶模式切换控制装置,输出用于将车辆的驾驶模式从自动驾驶模式向手动驾驶模式切换的信号,其中,所述驾驶模式切换控制装置具备:
获取部,从用于拍摄所述车辆的驾驶者的拍摄部获取拍摄所述驾驶者的拍摄数据并存储于存储部;
判定部,在为了实施所述切换而预先设定的期间,判定基于存储于所述存储部的所述拍摄数据而识别出的所述驾驶者的眼睛状态是否满足适于切换所述驾驶模式的预定条件;以及
信号输出部,在通过所述判定部判定为所述驾驶者的眼睛状态满足所述预定条件时,输出用于实施所述切换的信号,
所述判定部将根据在所述期间拍摄到的拍摄数据而识别出的所述驾驶者的眼睛附近的第一光量与根据在所述期间之前拍摄到的拍摄数据而识别出的所述驾驶者的眼睛附近的第二光量进行比较,在所述第一光量比所述第二光量变化了预定量以上时,判定为所述驾驶者的眼睛状态不满足所述预定条件。
2.根据权利要求1所述的驾驶模式切换控制装置,其中,
所述判定部将根据在所述期间拍摄到的拍摄数据而识别出的所述驾驶者的第一眼睛尺寸与根据在所述期间之前拍摄到的拍摄数据而识别出的所述驾驶者的第二眼睛尺寸进行比较,在所述第一眼睛尺寸相比所述第二眼睛尺寸在目视能力降低的方向上变化了预定量以上时,判定为所述驾驶者的眼睛状态不满足所述预定条件。
3.根据权利要求1或2所述的驾驶模式切换控制装置,其中,
在通过所述判定部判定为所述驾驶者的眼睛状态不满足所述预定条件时,所述信号输出部向所述判定部输出用于再次进行所述判定部的判定的信号。
4.一种驾驶模式切换控制系统,输出用于将车辆的驾驶模式从自动驾驶模式向手动驾驶模式切换的信号,其中,所述驾驶模式切换控制系统具备:
拍摄部,用于拍摄所述车辆的驾驶者;
获取部,从所述拍摄部获取拍摄所述驾驶者的拍摄数据并存储于存储部;
判定部,在为了实施所述切换而预先设定的期间,判定基于存储于所述存储部的所述拍摄数据而识别出的所述驾驶者的眼睛状态是否满足适于切换所述驾驶模式的预定条件;以及
信号输出部,在通过所述判定部判定为所述驾驶者的眼睛状态满足所述预定条件时,输出用于实施所述切换的信号,
所述判定部将根据在所述期间拍摄到的拍摄数据而识别出的所述驾驶者的眼睛附近的第一光量与根据在所述期间之前拍摄到的拍摄数据而识别出的所述驾驶者的眼睛附近的第二光量进行比较,在所述第一光量比所述第二光量变化了预定量以上时,判定为所述驾驶者的眼睛状态不满足所述预定条件。
5.一种驾驶模式切换控制方法,输出用于将车辆的驾驶模式从自动驾驶模式向手动驾驶模式切换的信号,其中,
设置于所述车辆的拍摄部拍摄所述车辆的驾驶者,
处理器进行以下处理:
获取通过所述拍摄部拍摄所述驾驶者的拍摄数据并存储于存储部;
在为了实施所述切换而预先设定的期间,判定基于存储于所述存储部的所述拍摄数据而识别出的所述驾驶者的眼睛状态是否满足适于切换所述驾驶模式的预定条件;以及
在判定为所述驾驶者的眼睛状态满足所述预定条件时,输出用于实施所述切换的信号,
所述判定包括以下判定:将根据在所述期间拍摄到的拍摄数据而识别出的所述驾驶者的眼睛附近的第一光量与根据在所述期间之前拍摄到的拍摄数据而识别出的所述驾驶者的眼睛附近的第二光量进行比较,在所述第一光量比所述第二光量变化了预定量以上时,判定为所述驾驶者的眼睛状态不满足所述预定条件。
6.一种存储介质,存储有程序,所述程序使计算机作为权利要求1至3中任一项所述的驾驶模式切换控制装置所具备的各部分而发挥功能。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017046219A JP6652090B2 (ja) | 2017-03-10 | 2017-03-10 | 運転モード切替制御装置、システム、方法、およびプログラム |
| JP2017-046219 | 2017-03-10 | ||
| PCT/JP2017/033132 WO2018163471A1 (ja) | 2017-03-10 | 2017-09-13 | 運転モード切替制御装置、システム、方法、およびプログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN109844842A CN109844842A (zh) | 2019-06-04 |
| CN109844842B true CN109844842B (zh) | 2022-01-04 |
Family
ID=63447440
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201780063054.4A Active CN109844842B (zh) | 2017-03-10 | 2017-09-13 | 驾驶模式切换控制装置、系统、方法以及存储介质 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20190243362A1 (zh) |
| JP (1) | JP6652090B2 (zh) |
| CN (1) | CN109844842B (zh) |
| DE (1) | DE112017007217T5 (zh) |
| WO (1) | WO2018163471A1 (zh) |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7175321B2 (ja) * | 2018-09-20 | 2022-11-18 | 三菱電機株式会社 | 運転支援装置および運転支援方法 |
| US20200379870A1 (en) * | 2019-05-28 | 2020-12-03 | Trane International Inc. | Ranking user interface elements based on physical conditions |
| JP7298400B2 (ja) * | 2019-09-03 | 2023-06-27 | トヨタ自動車株式会社 | 車両の運転支援装置 |
| US20210107498A1 (en) * | 2019-10-09 | 2021-04-15 | Baidu Usa Llc | Safe transition from autonomous-to-manual driving mode with assistance of autonomous driving system |
| WO2021145131A1 (ja) * | 2020-01-17 | 2021-07-22 | ソニーセミコンダクタソリューションズ株式会社 | 情報処理装置、情報処理システム、情報処理方法及び情報処理プログラム |
| FR3120837A1 (fr) * | 2021-03-16 | 2022-09-23 | Psa Automobiles Sa | Véhicule avec détection de changement de luminosité dans le scénario de conduite |
| JP7524806B2 (ja) * | 2021-03-24 | 2024-07-30 | トヨタ自動車株式会社 | 車両制御装置、車両制御用コンピュータプログラム及び車両制御方法 |
| JP7528882B2 (ja) | 2021-07-16 | 2024-08-06 | 株式会社デンソー | 提示制御装置、提示制御プログラム、自動運転制御装置、及び自動運転制御プログラム |
| US11722789B1 (en) * | 2022-02-01 | 2023-08-08 | Ford Global Technologies, Llc | Multi-camera imaging system selecting between visible and infrared views in a vehicle |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1388945A (zh) * | 2000-10-07 | 2003-01-01 | 辛成福 | 虹膜识别系统和方法及用于实现虹膜识别方法的计算机可读存储介质存储的计算机可执行指令 |
| CN101105690A (zh) * | 2007-07-26 | 2008-01-16 | 武汉理工大学 | 城市长隧道监控系统中的多传感器融合方法 |
| CN101951828A (zh) * | 2008-05-12 | 2011-01-19 | 丰田自动车株式会社 | 驾驶员成像装置以及驾驶员成像方法 |
| CN201724034U (zh) * | 2010-06-29 | 2011-01-26 | 重庆三弓科技发展有限公司 | 隧道照明布设系统 |
| CN104573704A (zh) * | 2013-10-09 | 2015-04-29 | 爱信精机株式会社 | 眼部检测装置、方法 |
| CN104782115A (zh) * | 2012-10-30 | 2015-07-15 | 株式会社电装 | 车辆用图像处理装置 |
| DE102014011811A1 (de) * | 2014-08-09 | 2016-02-11 | Audi Ag | Informieren eines Verkehrsteilnehmers über eine autopilotgesteuerte Fahrt |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10309961A (ja) * | 1997-05-12 | 1998-11-24 | Toyota Motor Corp | 自動走行車両制御装置 |
| US9878693B2 (en) * | 2004-10-05 | 2018-01-30 | Vision Works Ip Corporation | Absolute acceleration sensor for use within moving vehicles |
| US9342074B2 (en) * | 2013-04-05 | 2016-05-17 | Google Inc. | Systems and methods for transitioning control of an autonomous vehicle to a driver |
| JP6521803B2 (ja) * | 2014-12-09 | 2019-05-29 | 株式会社Soken | 自動運転制御装置、フットレスト、自動運転制御方法、および運転情報出力方法 |
| JP6191633B2 (ja) * | 2015-02-20 | 2017-09-06 | トヨタ自動車株式会社 | 運転支援装置 |
-
2017
- 2017-03-10 JP JP2017046219A patent/JP6652090B2/ja not_active Expired - Fee Related
- 2017-09-13 CN CN201780063054.4A patent/CN109844842B/zh active Active
- 2017-09-13 WO PCT/JP2017/033132 patent/WO2018163471A1/ja active Application Filing
- 2017-09-13 DE DE112017007217.4T patent/DE112017007217T5/de active Pending
-
2019
- 2019-04-16 US US16/385,008 patent/US20190243362A1/en not_active Abandoned
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1388945A (zh) * | 2000-10-07 | 2003-01-01 | 辛成福 | 虹膜识别系统和方法及用于实现虹膜识别方法的计算机可读存储介质存储的计算机可执行指令 |
| CN101105690A (zh) * | 2007-07-26 | 2008-01-16 | 武汉理工大学 | 城市长隧道监控系统中的多传感器融合方法 |
| CN101951828A (zh) * | 2008-05-12 | 2011-01-19 | 丰田自动车株式会社 | 驾驶员成像装置以及驾驶员成像方法 |
| CN201724034U (zh) * | 2010-06-29 | 2011-01-26 | 重庆三弓科技发展有限公司 | 隧道照明布设系统 |
| CN104782115A (zh) * | 2012-10-30 | 2015-07-15 | 株式会社电装 | 车辆用图像处理装置 |
| CN104573704A (zh) * | 2013-10-09 | 2015-04-29 | 爱信精机株式会社 | 眼部检测装置、方法 |
| DE102014011811A1 (de) * | 2014-08-09 | 2016-02-11 | Audi Ag | Informieren eines Verkehrsteilnehmers über eine autopilotgesteuerte Fahrt |
Also Published As
| Publication number | Publication date |
|---|---|
| DE112017007217T5 (de) | 2019-11-21 |
| CN109844842A (zh) | 2019-06-04 |
| WO2018163471A1 (ja) | 2018-09-13 |
| US20190243362A1 (en) | 2019-08-08 |
| JP6652090B2 (ja) | 2020-02-19 |
| JP2018151754A (ja) | 2018-09-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN109844842B (zh) | 驾驶模式切换控制装置、系统、方法以及存储介质 | |
| JP6575492B2 (ja) | 自動運転システム | |
| JP6611085B2 (ja) | 車両制御装置 | |
| CN109564734B (zh) | 驾驶辅助装置、驾驶辅助方法、移动体和程序 | |
| CN109689476B (zh) | 驾驶模式切换控制装置、方法以及存储介质 | |
| US11964668B2 (en) | Vehicle travel control method and travel control device | |
| US11873007B2 (en) | Information processing apparatus, information processing method, and program | |
| JP7111510B2 (ja) | 状態判定装置、運転支援装置、状態判定方法、及び、運転支援方法 | |
| WO2017154396A1 (ja) | 運転交代制御装置及び運転交代制御方法 | |
| CN117002531A (zh) | 车辆的控制系统、车辆的控制方法以及存储介质 | |
| WO2018168019A1 (ja) | 運転切り替え判定装置、運転切り替え判定方法及び運転切り替え判定のためのプログラム | |
| US11837088B2 (en) | Driving assistance apparatus | |
| JP6809421B2 (ja) | 車両用投影制御装置、および、ヘッドアップディスプレイ装置 | |
| JP2023078605A (ja) | 車両制御装置 | |
| US11052822B2 (en) | Vehicle control apparatus, control method, and storage medium for storing program | |
| JP6949288B2 (ja) | 運転支援装置、運転支援システムおよび運転支援方法 | |
| CN110167781B (zh) | 显示装置以及显示方法 | |
| WO2018168050A1 (ja) | 集中度判定装置、集中度判定方法及び集中度判定のためのプログラム | |
| WO2018163454A1 (ja) | 運転モード切替制御装置、方法およびプログラム | |
| JP6760231B2 (ja) | 衝突回避支援装置 | |
| WO2018168046A1 (ja) | 集中度判定装置、集中度判定方法及び集中度判定のためのプログラム | |
| JP7516445B2 (ja) | 運転支援装置 | |
| US20230398865A1 (en) | Remote driving system and control method for vehicle | |
| WO2024105863A1 (ja) | 運転制御方法及び運転制御装置 | |
| CN111216631B (zh) | 行驶控制装置、控制方法以及存储程序的存储介质 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |