CN109688962B - 对接手术机器人臂与器械 - Google Patents
对接手术机器人臂与器械 Download PDFInfo
- Publication number
- CN109688962B CN109688962B CN201780056182.6A CN201780056182A CN109688962B CN 109688962 B CN109688962 B CN 109688962B CN 201780056182 A CN201780056182 A CN 201780056182A CN 109688962 B CN109688962 B CN 109688962B
- Authority
- CN
- China
- Prior art keywords
- surgical
- interface structure
- instrument
- robotic arm
- interface
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000003032 molecular docking Methods 0.000 title claims description 11
- 230000000717 retained effect Effects 0.000 claims abstract description 18
- 230000033001 locomotion Effects 0.000 claims description 37
- 239000012636 effector Substances 0.000 claims description 19
- 239000000463 material Substances 0.000 claims description 9
- 230000005540 biological transmission Effects 0.000 claims description 8
- 239000012528 membrane Substances 0.000 claims description 3
- 238000000034 method Methods 0.000 description 11
- 230000007246 mechanism Effects 0.000 description 10
- 230000000295 complement effect Effects 0.000 description 9
- 238000001356 surgical procedure Methods 0.000 description 9
- 230000004888 barrier function Effects 0.000 description 7
- 210000003414 extremity Anatomy 0.000 description 7
- 238000002955 isolation Methods 0.000 description 6
- 238000004891 communication Methods 0.000 description 3
- 230000008878 coupling Effects 0.000 description 3
- 238000010168 coupling process Methods 0.000 description 3
- 238000005859 coupling reaction Methods 0.000 description 3
- -1 polypropylene Polymers 0.000 description 3
- 229920002633 Kraton (polymer) Polymers 0.000 description 2
- 238000011217 control strategy Methods 0.000 description 2
- 238000006073 displacement reaction Methods 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- 229920001343 polytetrafluoroethylene Polymers 0.000 description 2
- 239000004810 polytetrafluoroethylene Substances 0.000 description 2
- 230000008569 process Effects 0.000 description 2
- 238000002432 robotic surgery Methods 0.000 description 2
- 238000000926 separation method Methods 0.000 description 2
- 210000000707 wrist Anatomy 0.000 description 2
- 239000004698 Polyethylene Substances 0.000 description 1
- 239000004743 Polypropylene Substances 0.000 description 1
- 239000002537 cosmetic Substances 0.000 description 1
- 239000006261 foam material Substances 0.000 description 1
- 238000002357 laparoscopic surgery Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 239000002985 plastic film Substances 0.000 description 1
- 229920000728 polyester Polymers 0.000 description 1
- 229920000573 polyethylene Polymers 0.000 description 1
- 229920001155 polypropylene Polymers 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 230000004044 response Effects 0.000 description 1
Images















Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/068—Surgical staplers, e.g. containing multiple staples or clamps
- A61B17/072—Surgical staplers, e.g. containing multiple staples or clamps for applying a row of staples in a single action, e.g. the staples being applied simultaneously
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/74—Manipulators with manual electric input means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/76—Manipulators having means for providing feel, e.g. force or tactile feedback
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B46/00—Surgical drapes
- A61B46/10—Surgical drapes specially adapted for instruments, e.g. microscopes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/068—Surgical staplers, e.g. containing multiple staples or clamps
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/068—Surgical staplers, e.g. containing multiple staples or clamps
- A61B17/072—Surgical staplers, e.g. containing multiple staples or clamps for applying a row of staples in a single action, e.g. the staples being applied simultaneously
- A61B17/07207—Surgical staplers, e.g. containing multiple staples or clamps for applying a row of staples in a single action, e.g. the staples being applied simultaneously the staples being applied sequentially
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/32—Surgical cutting instruments
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B2017/00367—Details of actuation of instruments, e.g. relations between pushing buttons, or the like, and activation of the tool, working tip, or the like
- A61B2017/00389—Button or wheel for performing multiple functions, e.g. rotation of shaft and end effector
- A61B2017/00393—Button or wheel for performing multiple functions, e.g. rotation of shaft and end effector with means for switching between functions
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B2017/00477—Coupling
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/068—Surgical staplers, e.g. containing multiple staples or clamps
- A61B17/072—Surgical staplers, e.g. containing multiple staples or clamps for applying a row of staples in a single action, e.g. the staples being applied simultaneously
- A61B2017/07214—Stapler heads
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B17/2909—Handles
- A61B2017/2912—Handles transmission of forces to actuating rod or piston
- A61B2017/2923—Toothed members, e.g. rack and pinion
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B2034/302—Surgical robots specifically adapted for manipulations within body cavities, e.g. within abdominal or thoracic cavities
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Engineering & Computer Science (AREA)
- Medical Informatics (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Robotics (AREA)
- Ophthalmology & Optometry (AREA)
- Manipulator (AREA)
Abstract
一种用于将手术机器人臂以可拆卸的方式对接到手术器械的接口结构,接口结构包括:基部,该基部包括用于面向手术器械的第一表面和用于面向手术机器人臂的第二表面;和多个第一紧固件,该多个第一紧固件由基部支撑并从第一表面突出,多个第一紧固件被构造为接合手术器械,以便将接口结构保持到手术器械。接口结构接合手术机器人臂,以便将接口结构保持到手术机器人臂,其中,多个第一紧固件和接口结构的剩余部分被成形为使得在手术器械与手术机器人臂分离时,接口结构被保持到手术机器人臂。
Description
背景
已知将机器人用于辅助并执行手术。图1例示了典型手术机器人100,该手术机器人由基座108、臂102以及器械105构成。基座支撑机器人,并且本身刚性地附接到例如手术室地板、手术室天花板或手推车。臂在基座与器械之间延伸。臂借助于沿着其长度的多个挠性接头103铰接,这些挠性接头用于将手术器械定位在相对于患者的期望位置中。手术器械附接到机器人臂的远端104。手术器械在端口107处穿透患者101的身体,以便接近手术部位。在其远端处,器械包括用于参加医疗程序的末端执行器106。
图2例示了用于执行机器人腹腔镜手术的典型手术器械200。手术器械包括基座201,借助于该基座,手术器械连接到机器人臂。轴202在基座201与关节203之间延伸。关节203在末端执行器204中终止。在图2中,一对锯齿状的钳口被例示为末端执行器204。关节203允许末端执行器204相对于轴202移动。期望借助于关节向末端执行器204的运动提供至少两个自由度。
外科医生在典型腹腔镜手术的过程期间使用许多器械。由于该原因,期望使器械容易且以使得器械能够在术中交换的速度与机器人臂的端部可分离和可附接到该端部。因此,期望使一个器械与机器人臂分离并附接不同器械所耗费的时间最小化并使一个器械与机器人臂分离并附接不同器械的容易最大化。
手术室是无菌环境。手术机器人系统必须无菌至它暴露于患者的程度。手术器械在用于手术中之前消毒,然而,机器人臂在使用之前不消毒。相反,在手术之前,在手术机器人的整体上方放置无菌盖布。这样,患者不暴露于非无菌手术机器人臂。当在术中交换器械时,期望维持无菌屏障。
发明内容
根据本发明的方面,提供了一种用于将手术机器人臂可拆卸地对接到手术器械的接口结构,接口结构包括:基部,该基部包括用于面向手术器械的第一表面和用于面向手术机器人臂的第二表面;和多个第一紧固件,该多个第一紧固件由基部支撑并从第一表面突出,多个第一紧固件被构造为接合手术器械,以便将接口结构保持到手术器械;接口结构还被构造为接合手术机器人臂,以便将接口结构保持到手术机器人臂,其中,多个第一紧固件和接口结构的剩余部分被成形为使得在手术器械从手术机器人臂拆卸时,接口结构被保持到手术机器人臂。
各个第一紧固件可以包括主体和从主体的突起,突起被构造为接合手术器械的尖头。突起可以与基部的平面平行。突起可以包括一对突出元件,所述一对突出元件被成形为结合起来保持手术器械的尖头。
多个第一紧固件可以被成形为,在手术器械附接到接口结构时,阻止手术器械沿与手术机器人臂的轴向方向垂直的方向相对于接口结构移动。
多个第一紧固件可以被成形为,在手术器械附接到手术机器人臂时,阻止手术器械沿手术机器人臂的轴向方向相对于手术机器人臂移动。
在接口结构附接到手术机器人臂时,基部可以与手术机器人臂的轴向方向平行。
基部可以包括具有第一表面和第二表面的外缘,外缘包围中空内部。
接口结构还可以包括在第一表面上的对齐特征,这些对齐特征用于辅助手术器械与手术机器人臂在接合期间的对齐。对齐特征可以包括立柱或凹部。
接口结构还可以包括附接到基部的外缘的后边缘的后翼部,后翼部被构造为覆盖手术机器人臂的近端暴露面。后翼部可以远离手术机器人臂的远端相对于基部成角度。后翼部和基部可以一体形成。后翼部可以围绕基部的外缘的后边缘枢接到基部。后翼部可以包括用于紧固到手术机器人臂的近端暴露面的一个或更多个第三紧固件。
接口结构还可以包括附接到基部的外缘的前边缘的前翼部,前翼部被构造为覆盖手术机器人臂的远端暴露面。前翼部和基部可以一体形成。前翼部可以围绕基部的外缘的前边缘枢接到基部。前翼部可以包括用于紧固到手术机器人臂的远端暴露面的一个或更多个第四紧固件。各第四紧固件可以包括主体和从主体的突起,突起被构造为保持在手术机器人臂中的凹部中。前翼部的内部面可以包括偏置材料,该偏执材料用于在接口结构接合在手术机器人臂上时,使接口结构偏置使之抵靠手术机器人臂。
接口结构还可以包括包封部,该包封部连接基部的相对边缘,以便在接合在手术机器人臂上时,将接口结构保持到手术机器人臂,其中,多个第一紧固件和包封部被成形为使得在手术器械从手术机器人臂拆卸时,接口结构被保持到手术机器人臂。包封部可以被成形为,在接口结构接合在手术机器人臂上时,外切手术机器人臂的外部表面。基部和包封部可以一体形成。包封部的内部表面可以具有带肋轮廓。
接口结构还可以包括多个第二紧固件,该多个第二紧固件沿与第一紧固件相反的方向突出,多个第二紧固件被构造为接合手术机器人臂,以便将接口结构保持到手术机器人臂,其中,多个第一紧固件和多个第二紧固件被成形为使得在手术器械从手术机器人臂拆卸时,接口结构被保持到手术机器人臂。各个第二紧固件可以包括突起,该突起被构造为保持在手术机器人臂中的凹部中。
对于第一和第二紧固件中的每一个,突起可以相对于主体成角度,第二紧固件的突起比第一紧固件的突起更尖锐地成角度。各个第一紧固件可以与第二紧固件中的一个一体形成。各个第一紧固件可以与第二紧固件中的一个以及基部一体形成。
在手术器械附接到手术机器人臂时,外缘可以被包含在沿手术机器人臂的轴向方向由手术机器人臂的外表面形成的边界内,并且其中,各第二紧固件可与在手术机器人臂的外表面中的凹部接合。
各第四紧固件可以与第一和第二紧固件垂直。
接口结构还可以包括侧凸缘部,各侧凸缘部附接到基部的外缘的侧边缘。各第二紧固件可以与侧凸缘部一体形成。
接口结构的外边界可以终止于盖布中。盖布和接口结构可以一体形成。
接口结构的内边界可以终止于膜中,该膜在中空内部上方延伸。
接口结构还可以包括无线接收器,该无线接收器用于从手术器械接收无线传输。无线接收器可以位于接口结构的面向手术机器人臂的表面上。
根据本发明的第二方面,提供了一种用于机器人手术中的手术器械,手术器械包括:轴;在轴的远端处的手术末端执行器;以及在轴的近端处的对接部,该对接部用于经由接口结构对接手术机器人臂,对接部包括:主体,该主体被构造为接合接口结构的第一紧固件;和接合部,接合部与轴的轴向方向横切地相对于主体可位移,其中,接合部被朝向采用其可位移范围的最远离轴的端部处的位置偏置。
接合部可以包括多个尖头,各尖头被构造为在接合部采用其可位移范围的最远离轴的端部处的位置时与接口结构的第一紧固件接合。接合部可以被构造为在接合部采用其可位移范围的最靠近轴的端部处的位置时与接口结构的各个第一紧固件分离。
接合部可以被弹簧加载为使其位置被朝向其可位移范围的最远离轴的端部的位置偏置。
接合部可以包括第一凹部,并且主体可以包括第二凹部,第一和第二凹部同轴且与轴的轴向方向横切,手术器械还包括被部分收容在第一凹部且部分收容在第二凹部中的销,以便约束接合部横向于轴的轴向方向相对于主体的运动。
手术器械还可以包括无线发送器,该无线发送器用于向接口结构发送无线传输。
根据本发明的第三方面,提供了一种用于机器人手术中的手术机器人臂,手术机器人臂包括:基座;和一系列关节,该系列关节在手术机器人臂的远端处将基座连接到对接部,所述一系列关节使得对接部能够相对于基座铰接;对接部,该对接部被构造为通过保持接口结构而对接手术器械。
附图说明
现在将参照附图用示例的方式描述本发明。在附图中:
图1例示了执行手术程序的手术机器人;
图2例示了已知手术器械;
图3例示了手术机器人;
图4例示了器械接口;
图5例示了具有所附接接口结构的机器人臂的驱动组件接口;
图6例示了被定位为与机器人臂接合的器械。
图7例示了接口结构;
图8例示了机器人臂的驱动组件接口;
图9例示了经由图7的接口结构附接到机器人臂的器械;
图10例示了另外的接口结构;
图11例示了经由图10的接口结构附接到机器人臂的器械;
图12例示了穿过图11的部分剖面图;
图13孤立地例示了图12的可位移部件1201;
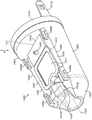
图14例示了另外的接口结构;
图15例示了另外的器械接口;以及
图16例示了附接到机器人臂的图14的接口结构。
具体实施方式
图3例示了具有臂300的手术机器人,该臂从基座301延伸。臂包括若干刚性肢体302。肢体由旋转接头303联接。最近端肢体302a由接头303a联接到基座。它和其他肢体由另外的接头303串联联接。合适地,手腕304由四个单独的旋转接头组成。手腕304将一个肢体302b联接到臂的最远端肢体302c。最远端肢体302c承载用于手术器械306的附接部305。臂的各接头303具有:一个或更多个马达307,该一个或更多个马达可以被操作为致使各接头处的旋转运动;和一个或更多个位置和/或转矩传感器308,传感器提供与该接头处的当前构造和/或负载有关的信息。合适地,马达被设置为接近接头,接头的运动由马达驱动,以便改善重量分布。为了清楚起见,图3中仅示出了马达和传感器中的一些。臂可以总体如在我们的共同未决专利申请PCT/GB2014/053523中描述。
臂终止于用于与器械306对接的附接部305中。合适地,器械306采取关于图2描述的形式。器械具有小于8mm的直径。合适地,器械具有5mm直径。器械可以具有小于5mm的直径。器械直径可以是轴的直径。器械直径可以是关节的剖面的直径。
合适地,关节的剖面的直径匹配或窄于轴的直径。附接部305包括用于驱动器械的铰接的驱动组件。驱动组件接口的可移动接口元件机械地接合器械接口的对应可移动接口元件,以便从机器人臂向器械传递驱动。一个器械在典型手术期间被交换另外若干次。由此,器械在手术期间可附接到机器人臂和从机器人臂拆卸。驱动组件接口和器械接口的特征在被使得接合彼此时帮助它们的对齐,以便减少需要由用户对齐它们所具有的精度。
器械306包括用于执行手术的末端执行器。末端执行器可以采取任意合适的形式。例如,末端执行器可以为光滑钳口、锯齿状钳口、夹子、剪刀、用于缝合的针、照相机、激光器、刀、吻合器、烧灼器、吸引器。如关于图2描述的,器械包括位于器械轴与末端执行器之间的关节。关节包括若干接头,其允许末端执行器相对于器械的轴移动。关节中的接头由诸如电缆的驱动元件来致动。这些驱动元件在器械轴的另一端处固定到器械接口的接口元件。由此,机器人臂如下向末端执行器传递驱动:驱动组件接口元件的移动使器械接口元件移动,该器械接口元件使驱动元件移动,该驱动元件使关节的接头移动,该关节的接头使末端执行器移动。
用于马达的控制器、转矩传感器以及编码器关于机器人臂分布。控制器经由通信总线连接到控制单元309。控制单元309包括处理器310和存储器311。存储器311以非暂时方式存储软件,该软件可由处理器执行以控制马达307的操作,以使得臂300以这里描述的方式操作。具体地,软件可以控制处理器310使得马达(例如,经由分布式控制器)依靠来自传感器308和外科医生命令接口312的输入驱动。控制单元309联接到马达307,以便根据通过执行软件生成的输出来驱动它们。控制单元309联接到传感器308,以便从传感器接收所感测的输入,并且控制单元联接到命令接口312,以便从命令接口接收输入。各联接例如可以各为电缆或光缆,或者可以由无线连接来提供。命令接口312包括用户以期望方式请求末端执行器的运动可以借以的一个或更多个输入装置。输入装置例如可以为手动可操作机械输入装置(诸如控制柄或控制杆)或非接触输入装置(诸如光学手势传感器)。在存储器311中存储的软件被构造为响应这些输入并且使得臂和器械的接头因此按照预定控制策略移动。控制策略可以包括安全特征,这些安全特征响应于命令输入减轻臂和器械的运动。由此,总之,命令接口312处的外科医生可以控制器械306以关于执行期望手术程序的这种方式移动。控制单元309和/或命令接口312可以远离臂300。
图4和图5例示了为了从机器人臂向器械传递驱动,驱动组件接口与器械接口的示例性机械互连。器械的轴402终止于器械接口400。器械接口400包括多个器械接口元件403、404、405。多对驱动元件(A1、A2)、(B1、B2)、(C1、C2)从轴402的端部延伸到器械接口400中。每对驱动元件终止于器械接口元件中的一个中。在图4所示的示例中,驱动元件对A1、A2终止于器械接口元件405中;驱动元件对B1、B2终止于器械接口元件403中;并且驱动元件对C1、C2终止于器械接口元件404中。
图4例示了三个器械接口元件和三个驱动元件对。在其他示例中,可以存在多于或少于三个器械接口元件。可以存在多于或少于三个驱动元件对。在图4中,器械接口元件与驱动元件对之间存在一对一关系。在其他示例中,器械接口元件与驱动元件对之间可以存在任意其他联接关系。例如,单个器械接口元件可以驱动多于一个驱动元件的对。在另一个示例中,多于一个器械接口元件可以驱动驱动单个对的元件。
器械接口元件在器械接口内可位移。在所示的示例中,器械接口元件沿着轨道可滑动。器械接口元件403沿着轨道406可滑动,并且器械接口元件405沿着轨道407可滑动。器械接口元件404沿着轨道(未示出)可滑动。各器械接口元件沿着与该器械接口元件保持捕获的驱动元件的对的伸长方向平行的方向可位移。各器械接口元件沿与器械轴402的纵轴408平行的方向可位移。在器械接口元件沿着其轨道移动时,它引起到固定到它的驱动元件对的对应移动。由此,使器械接口元件移动驱动驱动元件对的运动,因此驱动器械的接头的运动。
在图4的示例中,各器械接口元件包括翅片409、410、411,该翅片是与驱动组件接口元件接合的器械接口元件的一部分。
在另一个示例中,各驱动组件接口元件包括翅片,并且各器械接口元件包括用于接收对应驱动组件接口元件的翅片的插口。
图5例示了在机器人臂501的端部处的示例性驱动组件接口500。驱动组件接口500与器械接口400紧密配合。驱动组件接口500包括用于接收图4的器械接口的器械接口元件的结构。具体地,驱动组件接口元件502、503、504接收器械接口元件403、404、405。在所示的示例中,各驱动组件接口元件包括用于接收对应器械接口元件的翅片的插口。驱动组件接口元件502的插口505接收器械接口元件403的翅片409。驱动组件接口元件504的插口506接收器械接口元件405的翅片410。驱动组件接口元件503的插口507接收器械接口元件404的翅片411。
图5例示了三个驱动组件接口元件。在其他示例中,可以存在多于或少于三个驱动组件接口元件。在图4和图5中,在器械接口元件与驱动组件接口元件之间存在一对一关系。在其他示例中,在器械接口元件与驱动组件接口元件之间可以存在任意其他联接关系。例如,单个驱动组件接口元件可以驱动多于一个器械接口元件。在另一个示例中,多于一个驱动组件接口元件可以驱动单个器械接口元件。
各驱动组件接口元件在驱动组件内可位移。该位移被驱动。例如,位移可以由马达和丝杠装置来驱动。在所示的示例中,驱动组件接口元件沿着轨道可滑动。各驱动组件接口元件沿着与机器人臂的终端连杆的纵轴508平行的方向可位移。在驱动组件接口元件沿着其轨道移动时,它引起到它保持捕获的器械接口元件的对应移动。由此,驱动组件接口元件的驱动运动驱动器械接口元件的运动,该器械接口元件驱动器械的末端执行器的铰接。
图6例示了被放置为与机器人臂接合的器械。在器械接口元件403和驱动组件接口元件502接合、器械接口元件404和驱动组件接口元件503接合、且器械接口元件405和驱动组件接口元件504接合时,器械接口元件和驱动组件接口元件全部沿同一方向可位移。该方向平行于机器人臂508的终端连杆的纵轴和器械轴408的纵轴这两者。
在手术期间,手术机器人被笼罩在无菌盖布中,以在非无菌手术机器人与无菌手术环境之间提供无菌屏障。手术器械在附接到手术机器人之前消毒。无菌盖布通常由塑料片构造,例如由聚酯、聚丙烯、聚乙烯或聚四氟乙烯(PTFE)制成。合适地,盖布是挠性和/或可变形的。
无菌盖布不直接穿过驱动组件接口500与器械接口400之间。接口结构附接到用于在驱动组件接口与器械接口400之间对接的盖布。图7孤立地示出了示例性接口结构700。接口结构700在图5中还被示出为附接到驱动组件接口。接口结构700可以与盖布一体形成。另选地,接口结构700可以与盖布分开形成并随后附接到盖布。无论哪种方式,接口结构700是无菌的。接口结构700的一侧直接接触驱动组件接口。接口结构700的另一侧直接接触器械接口。由此,接口结构700防止非无菌驱动组件接口直接接触无菌器械接口,因此维持两个部件之间的无菌屏障。
接口结构700包括基部701和两个翼部702、703。合适地,在接口结构附接到手术机器人臂701时,基部701位于与机器人臂的终端连杆的轴向平行。基部701包括第一表面704,该第一表面在器械附接到机器人臂时面向手术器械(参见图6)。具体地,第一表面704面向器械接口400。基部701包括与第一表面704相对的第二表面705。第二表面705在器械附接到机器人臂时面向机器人臂(参见图6)。具体地,第二表面705面向驱动组件接口500。第一表面可以是平坦的。第二表面可以是平坦的。
基部701支撑多个第一紧固件706a-d,这些紧固件用于接合手术器械,以便将手术器械保持到接口结构。这些第一紧固件与第一表面横切地、从基部的第一表面704突出。第一紧固件从基部的外边缘中的较长者708、709突出。这些较长边缘是顺着基部701的长度延伸的边缘。在图7的示例中,存在四个第一紧固件。然而,可以存在多于四个或少于四个第一紧固件。优选地,存在至少两个第一紧固件,一个在较长的外边缘708、709二者之一上,以便防止器械沿与接口结构的纵轴707垂直的方向从接口结构离位。换言之,防止器械在器械与机器人臂接合时,沿分别与机器人臂的终端连杆和器械轴的纵轴508和408垂直的方向从接口结构离位。
基部701支撑多个第二紧固件710a-d(图7中仅示出710a和710b),这些第二紧固件用于接合机器人臂,以便将接口结构保持到机器人臂。这些第二紧固件从基部的第二表面705突出。第二紧固件从基部的外边缘中的较长者708、709突出。在图7的示例中,存在四个第二紧固件。然而,可以存在多于四个或少于四个第二紧固件。优选地,存在至少两个第二紧固件,一个在较长的外边缘708、709二者之一上,以便防止接口结构沿与接口结构的纵轴707垂直的方向从机器人臂离位。
第一紧固件和/或第二紧固件可以与基部一体形成。在图7中,各第一紧固件706a-d从与第二紧固件710a-d相同的、在基部701的外边缘上的位置突出。各第一紧固件可以与它紧邻着的第二紧固件一体形成。在另一个结构中,第一紧固件和第二紧固件可以从基部的外边缘上的不同位置突出。在图7中,存在相同数量的第一紧固件和第二紧固件。在另一个结构中,可以存在不同数量的第一紧固件和第二紧固件。
各第一紧固件包括:主体711,该主体抵接基部701的外边缘;和突起712,该突起是第一紧固件的被保持在手术器械中的一部分。主体711沿接口结构10的纵向延伸。第一紧固件的与接口结构的纵向横切的区域被成形为抵抗沿该横向方向施加于它的力。主体在接口结构的纵向上的长度足以结合主体711在方向A上的宽度来抵抗沿该横向方向施加于它的力。突起712相对于主体711成角度。例如,突起可以垂直于主体711的纵轴。
各第一紧固件被成形为使得在手术器械附接到接口结构时,第一紧固件阻止手术器械沿与接口结构的纵轴707垂直的方向相对于接口结构移动。在图7所示的示例性接口结构中,这如下实现。第一紧固件的主体711与基部701的表面垂直地从基部701的第一表面704突出。由此,第一紧固件706a在基部701的一个较长外边缘708上的主体结合另一个第一紧固件706c在基部701的另一个较长外边缘709上的主体,用来阻止手术器械沿与基部的较长外边缘横切的方向A移动。突起712的凸缘713与基部701平行但与其间隔开。该间隔对应于它接合的器械接口部件的间隔。一个第一紧固件的突起712的凸缘713结合基部,用来阻止手术器械沿与基部的较长外边缘横切的横向方向B移动。
各第一紧固件被成形为使得在手术器械附接到接口结构时,第一紧固件阻止手术器械沿着接口结构的纵轴707的方向相对于接口结构朝向后翼部702移动。该移动在接口结构附接到手术机器人臂时朝向手术机器人臂。在图7所示的示例性接口结构中,这如下实现。突起712的壁714与凸缘713和主体711横切。壁714抵接凸缘713和主体711。合适地,壁714垂直于基部701。由此,第一紧固件706a在基部701的一个较长外边缘708上的壁714结合另一个第一紧固件706c在基部701的另一个较长外边缘709上的壁714,用来阻止手术器械沿与基部的较长外边缘平行的方向C移动。
各第一紧固件被成形为使得在手术器械附接到接口结构时,第一紧固件允许手术器械沿着接口结构的纵轴707的方向相对于接口结构远离后翼部702移动。该移动在接口结构附接到手术机器人臂时远离手术机器人臂。在图7所示的示例性接口结构中,这通过不使第一紧固件的任何部分妨碍手术器械在该方向上的移动来实现。由此,手术器械可以通过使其沿着接口结构的纵轴的方向移动远离后翼部702(从而分离第一紧固件)来释放。
各第二紧固件包括:主体715,该主体抵接基部701的外边缘;和突起716,该突起是被保持在手术机器人臂中的第二紧固件的一部分。突起716相对于主体715成角度。合适地,突起716从主体715朝向基部701延伸。
第二紧固件被成形为使得在手术器械与手术机器人臂分离时,接口结构被保持在手术机器人臂中。接口结构比器械接口元件附接到驱动组件接口元件时更牢固地附接到手术机器人臂。由此,接口结构和它被并入的盖布在器械交换期间保持附接到手术机器人臂。为了减少交换器械所耗费的时间这是重要的,因为接口结构不需要在分离器械之后重新附接到机器人臂。为了降低盖布在交换器械时撕裂的可能性它也是重要的,该撕裂将使得无菌手术环境变得被在盖布的机器人臂侧的非无菌环境污染。在图7的示例中,这通过各第二紧固件的突起相对于其主体尖锐地成角度来实现。在远离手术机器人臂、横切于基部701施加力时,与器械接口元件从它们在驱动组件接口元件中的保持位置离位相比,第二紧固件更能抵抗从它们在手术机器人臂的凹部中的保持位置离位。
接口结构可以包括对齐特征,这些对齐特征在手术器械和手术机器人臂接合时辅助它们对齐。图7例示了在基部701的第一表面704上的对齐特征717a-d。所示的对齐特征从第一表面704突出。另选或另外地,对齐特征可以凹进到第一表面704中。所示的对齐特征是立柱。其他示例对齐特征包括脊和槽。在器械接口上的互补成形对齐特征接收对齐特征717a-d。合适地,对齐特征还用来阻止器械沿与接口结构的纵轴707平行的方向C相对于接口结构的移动。对齐特征可以用来阻止器械在接口结构的平面中相对于接口结构移动。优选地,接口结构包括至少一个对齐特征。多于一个对齐特征可以并入到接口结构中,诸如图7所示的四个。
接口结构的基部701包括包围中空内部719的外缘718。在接口结构附接到机器人臂时,外缘718被包含在沿手术机器人臂的纵向方向由手术机器人臂的外表面形成的边界内。外缘718具有接收手术器械的轴的端部的开口720。中空内部719接收与驱动组件接口元件接合的器械接口元件。
基部701可以支撑用于驱动组件接口元件的可移动盖,使得器械接口元件不直接接触驱动组件接口元件,相反经由可移动盖与驱动组件接口元件接合。在图7所示的示例中,可移动盖721被构造为接收器械接口元件403,并且由驱动组件接口元件502接收。可移动盖722被构造为接收器械接口元件404,并且由驱动组件接口元件503接收。可移动盖723被构造为接收器械接口元件405,并且由驱动组件接口元件504接收。各可移动盖紧密装配到其相应驱动组件接口元件中,并且各可移动盖紧密装配其相应器械接口元件。由此,驱动借助接口结构从驱动组件接口有效传递到器械接口。
在图7的示例中,外缘718包围收容所有可移动盖721、722、723的中空内部719。另选地,外缘718可以包围三个中空内部,各个中空内部收容单个可移动盖。
接口结构700还包括后翼部702。后翼部702附接到基部701的外缘718的后边缘725。后边缘725和前边缘726这两者接合基部的两个较长外边缘708和709。在接口结构700附接到机器人臂时,前边缘726被定位为比后边缘725更靠近机器人臂的自由远端。后翼部702覆盖机器人臂的近端暴露面801(参见图8)。后翼部702被合适地成形为匹配机器人臂的近端暴露面801的形状。合适地,后翼部702远离机器人臂的远端802而相对于与基部701垂直的方向B成角度α。例如,20°<α<50°,或者30°<α<40°,或者35°<α<37°。这辅助接口结构所附接到的盖布越过机器人臂的过程。后翼部702可以与基部701一体形成。后翼部702可以与基部701分开形成。后翼部702可以在后边缘725处枢接到基部701。例如,后翼部可以铰接到基部701。这将使得后翼部702和基部701能够相对于彼此平坦地封装和/或储存。后翼部可以包括一个或更多个第三紧固件727,该一个或更多个第三紧固件用于将后翼部紧固到机器人臂的近端暴露面801。在图7所示的示例中,第三紧固件727为被构造为钩到机器人臂中的凹部中的闩锁的形式。任意合适的紧固件可以用于第三紧固件。
接口结构700还包括前翼部703。前翼部703附接到基部701的外缘718的前边缘726。前翼部703覆盖手术机器人臂的远端暴露面802(参见图8)。前翼部703被合适地成形为匹配机器人臂的远端暴露面802的形状。机器人臂的远端暴露面802具有接收器械轴的端部的中空通道。由此,前翼部703合适地具有接收器械轴的端部的相同成形的中空通道。前翼部703在附接到机器人臂时可以垂直于基部701。前翼部703可以与基部701一体形成。前翼部703可以与基部701分开形成。前翼部703可以夹到基部701上。前翼部703可以在前边缘726处枢接到基部701。例如,前翼部可以铰接到基部701。这将使得前翼部703和基部701能够相对于彼此平坦地封装和/或储存。前翼部703可以包括一个或更多个第四紧固件728a-c,该一个或更多个第四紧固件用于将前翼部紧固到机器人臂的远端暴露面802。在图7的示例中,各第四紧固件具有与之前描述的第二紧固件相同的形式。如果前翼部703在附接到手术机器人臂时垂直于基部701,那么在接口结构附接到手术机器人臂时,第四紧固件728a-c垂直于第一和第二紧固件。
图10孤立地示出了另外的示例性接口结构1000。接口结构1000可以与盖布一体形成。另选地,接口结构1000可以与盖布分开形成并随后附接到盖布。无论哪种方式,接口结构1000是无菌的。接口结构1000的一侧直接接触驱动组件接口。接口结构1000的另一侧直接接触器械接口。由此,接口结构1000防止非无菌驱动组件接口直接接触无菌器械接口,因此维持两个部件之间的无菌屏障。
接口结构1000包括基部1001、前翼部1003、以及两个侧凸缘部1002、1004。接口结构1000还可以包括后翼部(未示出),该后翼部具有与关于图7描述的后翼部702相同的形状和特征。合适地,在接口结构附接到手术机器人臂1001时,基部701位于与机器人臂的终端连杆的轴向方向平行。基部1001包括第一表面1005,该第一表面在器械附接到机器人臂时面向手术器械。具体地,第一表面1005面向器械接口400。基部1001包括与第一表面1005相对的第二表面。第二表面在器械附接到机器人臂时面向机器人臂。具体地,第二表面面向驱动组件接口。第一表面可以是平坦的。第二表面可以是平坦的。
基部1001支撑多个第一紧固件1006a-d,这些紧固件用于接合手术器械,以便将手术器械保持到接口结构。这些第一紧固件与第一表面横切地、从基部的第一表面1005突出。第一紧固件从基部的外边缘中的较长者1008、1009突出。这些较长边缘是顺着基部1001的长度延伸的边缘。这些较长边缘是连接第一表面和侧凸缘部的边缘。在图10的示例中,存在四个第一紧固件。然而,可以存在多于四个或少于四个第一紧固件。优选地,存在至少两个第一紧固件,一个在较长的外边缘1008、1009二者之一上,以便防止器械沿与接口结构的纵轴1007垂直的方向从接口结构离位。换言之,防止器械在器械与机器人臂接合时,沿分别与机器人臂的终端连杆和器械轴的纵轴508和408垂直的方向从接口结构离位。
基部1001支撑多个第二紧固件(图10中未示出),这些第二紧固件用于接合机器人臂,以便将接口结构保持到机器人臂。各第二紧固件可以与侧凸缘部1002、1004一体形成。各第二紧固件可以从侧凸缘部的、第一紧固件从其突出的相对边缘突出。可以存在四个第二紧固件。然而,可以存在多于四个或少于四个第二紧固件。优选地,存在至少两个第二紧固件,从各个侧凸缘部1002、1004突出一个第二紧固件,以便防止接口结构沿与接口结构的纵轴1007垂直的方向从机器人臂离位。
第一紧固件可以与基部一体形成。可以存在相同数量的第一紧固件和第二紧固件。可以存在不同数量的第一紧固件和第二紧固件。
各第一紧固件包括:主体1011和突起1012。主体1011沿与第一表面1005横切的方向延伸。在图10的示例中,主体1011整体从第一表面1005延伸,并且抵接连接基部1001和侧凸缘部1002的边缘。然而,主体1001可以整体从基部1001的第一表面1005凸出,而不抵接连接基部1001和侧凸缘部1002的边缘。主体1011沿接口结构10的纵向方向延伸。第一紧固件的与接口结构的纵向方向横切的区域被成形为抵抗沿该横向方向施加于它的力。主体1011在接口结构的纵向方向上的长度足以结合主体1011在方向A上的宽度来抵抗沿该横向方向施加于它的力。突起1012被保持在手术器械中。突起1012可以包括均被保持在手术器械中的突出元件1012a、1012b。突起1012相对于主体1011成角度。例如,突起1012可以垂直于主体1011的纵轴。
各第一紧固件被成形为使得在手术器械附接到接口结构时,第一紧固件阻止手术器械沿与接口结构的纵轴1007垂直的方向相对于接口结构移动。在图10所示的示例性接口结构中,这如下实现。第一紧固件的主体1011与基部1001的表面垂直地从基部1001的第一表面1005突出。由此,第一紧固件1006a在基部1001的一侧上的主体结合另一个第一紧固件1006c在基部1001的另一侧上的主体,用来阻止手术器械沿与基部的较长外边缘横切的方向A移动。突出元件1012a、1012b可以平行于基部1001。突出元件1012a、1012b可以间隔开与它接合的器械接口部件的间隔对应的间隔。突出元件1012a、1012b用来阻止手术器械沿与基部的较长外边缘横切的横向方向B移动。
各第一紧固件可以被成形为使得在手术器械附接到接口结构时,第一紧固件阻止手术器械沿着接口结构的纵轴1007的方向相对于接口结构远离前翼部1003而移动。该移动在接口结构附接到手术机器人臂时朝向手术机器人臂。在图10中未示出,各第一紧固件可以包括与突起1012和主体1011横切的壁。壁抵接突起1012和主体1011。合适地,壁垂直于基部1001。由此,第一紧固件1006a在基部1001的一个较长外边缘1008上的壁结合另一个第一紧固件1006c在基部1001的另一个较长外边缘1009上的壁,用来阻止手术器械沿与基部的较长外边缘平行的方向C移动。
各第二紧固件包括突起,该突起是被保持在手术机器人臂中的第二紧固件的一部分。突起相对于侧凸缘部成角度。合适地,突起从侧凸缘部朝向基部1001延伸。
第二紧固件被成形为使得在手术器械与手术机器人臂分离时,接口结构被保持在手术机器人臂中。接口结构比器械接口元件附接到驱动组件接口元件时更牢固地附接到手术机器人臂。由此,接口结构和它被并入的盖布在器械交换期间保持附接到手术机器人臂。为了减少交换器械所耗费的时间这是重要的,因为接口结构不需要在分离器械之后重新附接到机器人臂。为了降低盖布在交换器械时撕裂的可能性它也是重要的,该撕裂将使得无菌手术环境变得被在盖布的机器人臂侧上的非无菌环境污染。在图10的示例中,这由各第二紧固件的突起相对于侧凸缘部尖锐地成角度来实现。在远离手术机器人臂、横切于基部1001施加力时,与器械接口元件从它们在驱动组件接口元件中的保持位置离位相比,第二紧固件更能抵抗从它们在手术机器人臂的凹部中的保持位置离位。
接口结构可以包括对齐特征,这些对齐特征在手术器械和手术机器人臂接合时辅助它们对齐。这些对齐特征如参照图7所述。
接口结构的基部1001包括包围中空内部1019的外缘1018。在接口结构附接到机器人臂时,外缘1018被包含在沿手术机器人臂的纵向方向由手术机器人臂的外表面形成的边界内。外缘1018具有接收手术器械的轴的端部的开口1020。中空内部1019接收与驱动组件接口元件接合的器械接口元件。
基部1001可以支撑用于驱动组件接口元件的可移动盖(未示出),使得器械接口元件不直接接触驱动组件接口元件,相反经由可移动盖与驱动组件接口元件接合。这些可移动盖如参照图7所述。外缘1018可以包围收容所有可移动盖的中空内部1019。另选地,外缘1018可以包围三个中空内部,各个中空内部收容单个可移动盖。
接口结构700还包括前翼部1003。前翼部1003附接到基部1001的外缘1018的前边缘1026。前翼部1003覆盖手术机器人臂的远端暴露面。前翼部1003被合适地成形为匹配机器人臂的远端暴露面的形状。机器人臂的远端暴露面具有接收器械轴的端部的中空通道。由此,前翼部1003合适地具有接收器械轴的端部的相同成形的中空通道。前翼部1003在附接到机器人臂时可以垂直于基部1001。前翼部1003可以与基部1001一体形成。前翼部1003可以与基部1001分开形成。前翼部1003可以夹到基部1001上。前翼部1003可以在前边缘1026处枢接到基部1001。例如,前翼部可以铰接到基部1001。这将使得前翼部1003和基部1001能够相对于彼此平坦地封装和/或储存。
图14孤立地示出了另外的示例性接口结构1400。合适地,接口结构1400是单个成型零件。接口结构1400可以与盖布一体形成。另选地,接口结构1400可以与盖布分开形成并随后附接到盖布。无论哪种方式,接口结构1400是无菌的。接口结构1400的一侧直接接触驱动组件接口。接口结构1400的另一侧直接接触器械接口。由此,接口结构1400防止非无菌驱动组件接口直接接触无菌器械接口,因此维持两个部件之间的无菌屏障。
接口结构1400包括基部1401和包封部1402。接口结构1400还可以包括前翼部1403。接口结构1400还可以包括后翼部1404。合适地,在接口结构附接到手术机器人臂1401时,基部1401位于与机器人臂的终端连杆的轴向平行。基部1401包括第一表面1405,该第一表面在器械附接到机器人臂时面向手术器械。具体地,第一表面1405面向器械接口400。基部1401包括与第一表面1405相对的第二表面(在图14上不可见)。第二表面在器械附接到机器人臂时面向机器人臂。具体地,第二表面面向驱动组件接口。第一表面可以是平坦的。第二表面可以是平坦的。
基部1401支撑多个第一紧固件1406a-d,这些紧固件用于接合手术器械,以便将手术器械保持到接口结构。这些第一紧固件及其与基部1401的关系如关于图10的第一紧固件1006a-d和基部1001所述。
包封部1402连接基部的外边缘中的较长者1408、1409。这些较长边缘是顺着基部1401的长度延伸的边缘。如图14所示,包封部可以外接驱动组件。包封部1402的形状可以匹配机器人臂在驱动组件处的外表面的形状。合适地,包封部1402接触机器人臂在驱动组件处的外部表面。该接触可以是紧密装配。该接触可以是鞘状的。这样,包封部1402支承在机器人臂在驱动组件处的外部表面上。从而,包封部1402用来将接口结构1400保持到机器人臂。具体地,包封部1402用来将接口结构1400沿与接口结构1400的纵轴1407横切的方向保持到机器人臂。
在手术器械与手术机器人臂分离时,接口结构1400被保持在手术机器人臂中。接口结构比器械接口元件附接到驱动组件接口元件时更牢固地附接到手术机器人臂。由此,接口结构和盖布在器械交换期间保持附接到手术机器人臂。为了减少交换器械所耗费的时间这是重要的,因为接口结构不需要在分离器械之后重新附接到机器人臂。为了降低盖布在交换器械时撕裂的可能性它也是重要的,该撕裂将使得无菌手术环境变得被在盖布的机器人臂侧上的非无菌环境污染。在图14的示例中,这通过包封部1402的形状包围机器人臂在驱动组件处的外部且通过包封部1402整体沿着侧1408和1409的长度连接到基部1401来实现。在远离手术机器人臂、横切于基部1401施加力时,与器械接口元件从它们在驱动组件接口元件中的保持位置离位相比,包封部1402更耐破坏且因此更能抵抗相对于手术机器人臂从其保持位置离位。
接口结构可以包括对齐特征,这些对齐特征在手术器械和手术机器人臂接合时辅助它们对齐。这些对齐特征可以如参照图7所述。例如,基部1401可以包括销1420。销1420可以位于接口结构1400的纵轴1407上。图15例示了接合接口结构1400的示例性器械接口1500。器械接口1500包括供接口结构1400的销1420接合到其中的凹部1501。凹部1501可以位于器械接口1500的纵轴1502上。销1420紧密装配到凹部1501中。图15的器械接口1500在座区域1505a、1505b、1505c、1505d处接触接口结构的基部1401。
接口结构的基部1401包括包围中空内部1411的外缘1410。在接口结构附接到机器人臂时,外缘1410被包含在沿手术机器人臂的纵向方向由手术机器人臂的外表面形成的边界内。外缘1410具有开口1412,该开口接收手术器械的轴的端部终止于其中的、器械接口1500的底盘的部分。开口1412为谷形状,具有谷壁1413a和1413b。器械接口1500具有接触面1503a和1503b,这些接触面具有与谷壁1413a、1413b互补的形状,使得接触面1503a、1503b在器械接口接合在接口结构中时接合谷壁1413a、1413b。合适地,接触面1503a、1503b轻微过盈配合到谷壁1413a、1413b。接触面和谷壁的接合用来防止器械与基部平行且横切于与接口结构1407的运动。接触面和谷壁的接合用来防止器械围绕接口结构1407的纵轴的旋转运动。器械接口1500合适地具有接触面1504,该接触面在器械接口接合在接口结构中时抵接开口1412的接触面1419。接触面1419横切于纵轴1407。接触面1419平行于基部的前边缘1415。前边缘1415接合基部的两个较长外边缘1408和1409。销1420在凹部1501中的接合以及接触面1504在接触面1419上的支承使得器械与接口结构轴向对齐。它们也用来阻止器械在轴向方向上相对于接口结构的移动。
中空内部1411接收与驱动组件接口元件接合的器械接口元件。合适地,挠性材料覆盖中空内部1411。挠性材料粘合到中空内部1411的外缘1414。这样,挠性材料提供器械接口元件与驱动组件接口元件之间的无菌屏障。挠性材料可以由科腾(kraton)组成。
另选地,基部1401可以支撑用于驱动组件接口元件的可移动盖(未示出),使得器械接口元件不直接接触驱动组件接口元件,相反经由可移动盖与驱动组件接口元件接合。这些可移动盖如参照图7所述。外缘1410可以包围收容所有可移动盖的中空内部1411。另选地,外缘1410可以包围三个中空内部,各个中空内部收容单个可移动盖。
接口结构1400还包括前翼部1403。前翼部1403附接到基部1401的外缘1410的前边缘1415。合适地,前翼部1403与接口结构的基部和包封部一体成型。前翼部1403覆盖手术机器人臂的远端暴露面。前翼部1403可以被成形为匹配机器人臂的远端暴露面的形状。
接口结构1400还包括后翼部1404。后翼部1404附接到基部1401的外缘1410的后边缘1416。后边缘1416和前边缘1415这两者接合基部的两个较长外边缘1408和1409。在接口结构1400附接到机器人臂时,前边缘1415被定位为比后边缘1416更靠近机器人臂的自由远端。后翼部1404覆盖机器人臂的近端暴露面。后翼部1404被合适地成形为匹配机器人臂的近端暴露面的形状。合适地,后翼部1404远离机器人臂的远端相对于与基部1401垂直的方向B成角度α。例如,20°<α<50°,或者30°<α<40°,或者35°<α<37°。这辅助使接口结构附接到的盖布越过机器人臂的过程。后翼部1404可以与基部1401和包封部1402一体成型。
后翼部可以包括一个或更多个第三紧固件1417,该一个或更多个第三紧固件用于将后翼部紧固到机器人臂的近端暴露面。在图14所示的示例中,存在均为夹子形式的两个第三紧固件1417a、1417b(1417b在图中不可见),该夹子被构造为夹到机器人臂的滑动套环的吊耳上(参见图6)。任意合适的紧固件可以用于第三紧固件。
接口结构1400可以包括用于与机器人臂交互的、在其内部表面上的特征。例如,接口结构1400可以包括用于使接口结构轴向地偏置以使之抵靠机器人臂的内部特征。该内部特征可以是位于前翼部1403的内部表面上的偏置材料。该偏置材料例如可以是弹性泡沫材料。在接口结构1400安装在机器人臂的端部上时,偏置材料推动接口结构1400使之抵靠机器人臂,使得推动各第三紧固件使之抵靠第三紧固件安装到上面的机器人臂的安装特征。这用来抵抗接口结构与机器人臂之间的运动。
接口结构1400可以包括在包封部1402的内部表面上的肋。这些肋在接口结构1400附接到机器人臂时可以接合在机器人臂在驱动组件处的外部表面中的互补形状的凹部中。这些肋用来抵抗接口结构与机器人臂之间的运动。
对于参照图7描述的接口结构和参照图10描述的接口结构这两者,接口结构的外边界终止于无菌盖布(未示出)中。无菌盖布笼罩手术机器人臂。接口结构的内边界可以终止于无菌膜(未示出)中,该无菌膜在中空内部的上方延伸,以隔离无菌环境与非无菌驱动组件。
对于参照图14描述的接口结构,接口结构的套环1418终止于无菌盖布(未示出)中。套环1418附接到后翼部1404和包封部1402。合适地,套环1418与后翼部1404和包封部1402一体成型。在图14的示例中,套环是圆柱面。无菌盖布笼罩手术机器人臂。在实践中,接口结构1400轴向地安装到机器人臂上,即,沿着驱动组件接口的纵轴安装在机器人臂的端部处。然后从机器人臂解下盖布。接口结构和无菌盖布的组合形成连续无菌屏障,使得在接口结构和无菌盖布附接到机器人臂时,没有机器人臂的部分暴露到接口结构的器械面向侧。
对于参照图7描述的接口结构和参照图10描述的接口结构这两者、以及参照图14描述的接口结构,接口结构还可以包括用于从手术器械接收无线传输的无线接收器。优选地,无线接收器根据具有短距离的通信协议(例如,NFC、WiFi或蓝牙)来操作。无线接收器接收与手术器械有关的传输。例如,接收器可以接收与手术器械的以下属性中的一个或更多个有关的传输:身份、类型、来源、状态、使用次数、使用时间长度、到期之前剩余使用次数、到期之前剩余使用时间长度。无线接收器可以位于接口结构上的任何地方。优选地,它位于接口结构面向手术机器人臂的侧上。例如,在图7的接口结构中,无线接收器可以位于后翼部的面向机器人臂的表面上。无线接收器可以是还合并用于向手术器械发送无线传输的发送器的无线收发器。
图8例示了未附接有图7的接口结构700的机器人臂的端部。机器人臂包括被设置为保持接口结构的第二紧固件710a-d的凹部803a-d(仅示出803a和803b)。凹部803a-d是与第二紧固件710a-d互补的形状。由此,各第二紧固件710紧密装配到其相应凹部803中,从而防止接口结构在接口结构与手术机器人臂接合时相对于手术机器人臂沿任意方向移动。
机器人臂包括被设置为保持接口结构的第三紧固件727的凹部804。凹部804是与第三紧固件727互补的形状。由此,第三紧固件727紧密装配到凹部804中。在图7和图8的示例中,凹部804包括供闩锁727钩到上面的壁架。
机器人臂包括被设置为保持接口结构的第四紧固件728a-c的凹部805a-c(仅示出805a)。凹部805a-c是与第四紧固件728a-c互补的形状。由此,各第四紧固件728紧密装配到其相应凹部805中。被保持在凹部805a-c的第四紧固件728a-c约束接口结构(因此约束所附接的手术器械)以防沿着机器人臂的终端连杆的纵轴508移动。由此,该结构阻止手术器械随着沿着纵轴508的方向驱动驱动组件接口元件而沿着驱动组件的纵轴508移位。
手术机器人臂中的凹部的数量和位置匹配位于接口结构上的第二、第三以及第四紧固件的数量和位置。在图8的实施方案中,存在匹配图7所示的四个第二紧固件710a-d的四个凹部803a-d。然而,可以存在多于或少于四个凹部803a-d。在图8的实施方案中,存在匹配图7的第三紧固件727的一个凹部804。然而,可以存在多于一个凹部804。在图8的实施方案中,存在匹配图7所示的三个第四紧固件728a-c的三个凹部805a-c。然而,可以存在多于或少于三个凹部805a-c。
与参照图8描述的机器人臂类似的机器人臂被构造为接收图10的接口结构1000。该机器人臂包括被设置为包括接口结构1000的第二紧固件的凹部。这些凹部是与第二紧固件互补的形状。由此,各第二紧固件紧密装配到其相应凹部中,从而防止接口结构在接口结构与手术机器人臂接合时相对于手术机器人臂沿任意方向移动。机器人臂包括锁销,为了接合接口结构1000与机器人臂,接口结构的后边缘1040被推回到该锁销上方。机器人臂可以包括另外的凹部。手术机器人臂中的凹部的数量和位置匹配在接口结构1000上的紧固件的数量和位置。
图9例示了手术机器人臂和手术器械的接合构造,其中,手术器械经由图7的接口结构700附接到手术机器人臂。在图9的示例中,手术器械包括主体902和接合部901,这两者覆盖图4和图6所示的器械接口400。接合部沿着器械轴408的纵轴的方向相对于主体可位移。
主体902包括至少两个凹部903a-b(仅示出903a),各凹部被构造为接收接口结构的至少一个第一紧固件706a-d。在图9所示的接合构造中,至少一个凹部与基部701的外边缘对齐,并且被构造为接收从基部701的外边缘708突出的至少一个第一紧固件。在图9所示的接合构造中,至少一个凹部与基部701的相对外边缘709对齐,并且被构造为接收从基部701的外边缘709突出的至少一个第一紧固件。在另选实施方案中,主体902可以包括每个第一紧固件706的凹部903。凹部903的数量和位置实施第一紧固件706。
接合部901在器械可以从接口结构自由抬离的分离位置与器械无法从接口结构自由抬离的接合位置之间可移动。在接合部901处于其可位移范围的最接近手术器械的末端执行器的端部时,接合部处于分离位置。在接合部901处于其可位移范围的最远离手术器械的末端执行器的端部时,接合部处于接合位置。
接合部包括多个尖头904a-d,各个尖头被构造为在接合构造中接合接口结构的第一紧固件。各尖头904是与第一紧固件706互补的形状。在图7和图9的示例中,各尖头具有插头形状,从而使得它能够接合到由接合结构的第一紧固件706和基部701的组合形成的插口中。
图11例示了手术机器人臂和手术器械的接合构造,其中,手术器械经由图10的接口结构1000附接到手术机器人臂。在图11的示例中,手术器械包括主体1102和两个接合部1101(示出一个),所有部件覆盖图4和图6所示的器械接口400。接合部在器械接口的相对两侧上。一个接合部接合在器械接口的一侧上的第一紧固件,并且另一个接合部接合在器械接口的另一侧上的第一紧固件。各接合部沿着与器械轴408的纵轴横切的、图10所示的方向A相对于主体可位移。各接合部朝向器械的内部沿着方向A可位移。
图12例示了沿着线HH、沿与器械轴408的纵轴横切的方向穿过图11的部分剖面图。该图例示了一个接合部1101的构造。接合部包括可位移部件1201。可位移部件1201包括多个尖头1202,各个尖头被构造为在接合构造中接合接口结构的第一紧固件1006。各尖头1202是与第一紧固件1006互补的形状。在图12的示例中,各尖头具有插头形状,从而使得它能够接合到由接合结构的突出元件1012形成的插口中。可位移部件1201可以包括两个尖头1202,两个尖头中的一个接合第一紧固件1006a,另一个接合第一紧固件1006b。尖头1201被成形为随着尖头接合第一紧固件而将器械接口下推到接合结构上。
可位移部件1201与器械的内主体1203分离开间隔1204。可位移部件1201沿与器械轴的纵轴横切的方向A朝向内主体1203可位移穿过间隔1204。任意合适的结构可以用于将可位移部件1201约束为仅沿方向A移动。在图12中,可位移部件1201包括收容销1206的凹部1205。凹部1205和销1206平行于方向A。销1206延伸到内主体1203中的对应凹部1207中。销1206比凹部1205和1207的总长至少短了间隔1204在方向A上的宽度。销1206被约束为在凹部1205和1207内沿着方向A移动。从而,销1206将可位移部件1201约束为仅沿着方向A相对于内主体1203滑动。弹簧1208跨越间隔1204,并且坐落在内主体1203和可位移部件1201中的凹部内。弹簧1208可以绕在销1206周围。弹簧1208适应可位移部件1201朝向内主体1203的移动,但将可位移部件1201偏置为远离内主体1203。销和凹部结构还使得器械和接口结构对齐,因为销1206仅可移动到凹部1207中,从而仅允许在凹部1205和凹部1207对齐时致动接合部1101。
接合部1101在器械可以从接口结构自由抬离的分离位置与器械无法从接口结构自由抬离的接合位置之间可移动。图12例示了器械接合在接口结构1000中的接合构造。弹簧1208使得内主体1203与可位移部件1201分离它们的最大间隔。在该最大间隔处,器械的尖头1202接合在突出元件1012中。换言之,器械停靠在接口结构1000中。在接合部1101的可位移范围的另一端处,弹簧1208被压缩,并且可位移部件1201被推向内主体1203。这使得尖头1202与突出元件1012分离。通过朝向器械内部沿方向A对接合部施加压力,器械与接口结构1000分离。然后沿方向B将器械抬离接口结构1000,以从机器人臂去除器械。合适地,在分离位置中,接合部1101坐落在器械的壳体中,使得壳体形成盖子。这使得用户能够在分离位置中更容易地紧握器械。为了接合器械与接口结构1000,沿朝向器械内部的方向A对接合部施加压力,然后沿朝向接口结构的方向B推动器械。一旦器械与接口结构对齐并与接口结构接触,则释放对接合部的压力。从而,弹簧的力将器械的尖头1202推动为与突出元件1012接合。
各第一紧固件的突起1012可以成形有导入特征,以便在用户不需要在向接口结构施加器械之前朝向器械的内部推入接合部的情况下允许尖头1202将突起1012推入到接合位置中。例如,导圆边缘1208可以使得在不操纵可位移部件1201的情况下能够将器械推配合到接口上。
手术器械可以以与参照接口结构1000和图11、图12以及图13描述的相同的方式经由图14的接口结构1400附接到手术机器人臂。
可以使用其他结构来促进器械在器械接合在第一紧固件1006中的位置与器械和第一紧固件1006分离的位置之间的移动。例如,器械的接合部可以围绕第一紧固件1006的纵轴可旋转。接合部可以从接合部的尖头接合在第一紧固件的突起1012中的接合位置旋转到尖头未接合在第一紧固件的突起1012中的分离位置。代替围绕第一紧固件的纵轴可旋转,接合部可以围绕第一紧固件的纵轴铰接。
图13孤立地例示了图12的可位移部件1201。第一凹部1205、销1206以及弹簧1208机构可以位于被标记为J的区域中的任何地方。第二凹部1205、销1206以及弹簧1208机构可以位于被标记为K的区域中的任何地方。多个凹部、销以及弹簧机构可以用于被标记为J和K的各区域中。多个凹部、销以及弹簧机构的弹簧可以具有不同尺寸。
可位移部件1201还可以包括将可位移部件紧固到器械接口的底盘的紧固件。紧固件例如可以是弹性吊耳或夹子。这些紧固件可以位于在图13上被标记为L的区域中的、可位移部件的边缘处。紧固件用来抵抗弹簧1208,因此使可位移部件沿方向A(图12上)偏置为远离器械内部。
除了上述接合机构之外,还可以实施辅助锁定机构,以便防止器械的以外去除。例如,辅助锁定机构可以将可位移部件1201固定到器械的另一部分或机器人臂的接口结构。这样,防止可位移部件1201朝向器械的内部沿方向A可位移。该辅助锁定机构在从机器人臂去除器械之前停用。该辅助锁定机构在将器械附接到机器人臂之前停用。
器械1102的外部主体和机器人臂的外部主体被成形为在器械停靠到机器人臂时为截头锥形。
在所有所述示例中,接合部901、1101被偏置为朝向采用接合位置。接合部例如可以弹簧加载为将其位置朝向接合位置偏置。
手术器械可以如上所述的包括无线发送器,该无线发送器用于向接口结构发送无线传输。手术器械可以如上所述的包括用于发送和接收无线通信的无线收发器。
接口结构可以用为平坦构造的盖布包裹。在图7的接口结构中,如果前翼部和后翼部与基部分离或铰接到基部,那么接口结构可以采用大致平坦的构造。在图10的接口结构中,如果侧凸缘部和前翼部与基部分离或铰接到基部,那么接口结构可以采用大致平坦的构造。接口结构然后折叠为用于使用的形状。
合适地,作为手术开始之前的设置过程的一部分,接口机构随着机器人臂被笼罩在无菌盖布中而紧固到驱动组件。在参照后翼部与基部一体形成的图7描述的接口结构中,基部和后翼部首先借助于将第二和第三紧固件接合在手术机器人臂的它们相应的凹部中附接到机器人臂。在该示例中,前翼部铰接到基部或为单独件。如果前翼部铰接到基部,那么在基部和后翼部与机器人臂接合之后,前翼部向下铰接并用第四紧固件紧固到机器人臂。如果前翼部是单独件,那么该前翼部在基部和后翼部与机器人臂接合之后单独紧固到机器人臂和/或基部上。在参照图10描述的接口结构中,接口结构通过朝向机器人臂沿方向B施加力来推配合到机器人臂上。在参照图14描述的接口结构中,接口结构通过沿轴向方向M施加力来推配合到机器人臂上(参见图16)。一旦接口结构被推到臂上,则从机器人臂解下盖布。随后,使用第三紧固件1417将接口结构固定到机器人臂。
在参照图7描述的示例中,随后将器械紧固到接口结构700。这通过用户沿图9所示的方向D移动接合部901来进行。方向D平行于朝向末端执行器的器械轴的纵轴。方向D平行于远离后翼部702的接口结构的纵轴。方向D平行于远离机器人臂的远端802的、机器人臂508的终端连杆的纵轴。例如,用户可以沿方向D滑动接合部901。用户使接合部901沿方向D位移,直到到达分离位置为止。用户然后通过沿方向F移动器械来使器械与接口结构接合,该方向F与朝向接口结构的器械轴的纵轴408垂直。用户可以使用接口结构的对齐特征717来辅助对齐。通过沿方向F移动器械,器械接口元件更容易地与驱动组件接口元件对齐。用户然后释放接合部901,从而使得接合部沿方向E移动。因为接合部901朝向采用接合位置偏置,所以接合部901沿方向E移动(参见图9),直到接合部的尖头904a-d碰撞第一紧固件706a-d的壁714为止。这是接合部的尖头904a-d与接合结构的第一紧固件706a-d接合的接合位置。
在手术期间的某一点,用另一个器械交换器械。通过用户沿方向D移动接合部901直到到达分离位置为止,将器械与接口结构700分离。用户然后沿方向G将器械抬离接口结构,该方向G与远离接口结构的器械轴的纵轴408垂直。然后可以如之前描述的将不同器械附接到接口结构。
该方法以及上面参照图10和图14的接口结构描述的对应方法使得器械能够在手术期间在不将患者暴露到非无菌环境的情况下快速且容易地与机器人臂分离以及附接到机器人臂。器械通过沿与器械的轴402垂直的方向将其抬离机器人臂来去除。由此,没有在分离或附接器械时将器械推到患者中的风险。
在附图中描绘的第一紧固件具有用于接收来自器械的插头/尖头的插口的形式。在附图中描绘的第二和第四紧固件具有用于夹到机器人臂的凹部中的夹子的形式。在附图中描绘的第三紧固件具有用于钩到机器人臂的壁架上方的闩锁结构。然而,紧固件可以采取任意合适的形式,例如,夹子、扣环、带扣、闩锁、插头、插口、钩子、吊环、五爪扣、金属圈、按钮、魔术贴(Velcro),只要满足以下准则即可:
1)在分离器械时接口结构保持附接到机器人臂。
2)接口结构、器械以及机器人臂不随着由机器人臂驱动器械的铰接而沿着它们的纵轴相对于彼此移位。
在参照图7描述的示例中,接口结构包括基部701、后翼部702以及前翼部703。另选地,接口结构可以如上所述,但没有后翼部702。另选地,接口结构可以如上所述,但没有前翼部703。另选地,接口结构可以如上所述,但没有后翼部702且没有前翼部703。
器械可以用于非手术目的。例如,它可以用于美容过程中。
申请人将这里描述的各独立特征以及两个或更多个这种特征的任意组合特此独立地公开到以下程度:这种特征或组合能够鉴于本领域技术人员的公知一般知识整体基于本说明书来进行,而不管这种特征或特征的组合是否解决这里公开的任何问题,并且不限制权利要求的范围。申请人指示本发明的方面可以由任意这种独立特征或特征的组合构成。鉴于前述说明书,将对本领域技术人员明显的是,可以在本发明的范围内进行各种修改。
Claims (26)
1.一种手术机器人,该手术机器人包括手术器械、手术机器人臂和用于将所述手术机器人臂以可拆卸的方式对接到所述手术器械的接口结构;
所述手术器械包括具有器械接口元件的器械接口;
所述手术机器人臂包括用于驱动所述手术器械的铰接的驱动组件,所述驱动组件具有用于接收所述器械接口元件的驱动组件接口元件;
所述接口结构一体形成并包括:
基部,所述基部包括用于面向所述手术器械的第一表面和用于面向所述手术机器人臂的第二表面;和
多个第一紧固件,所述多个第一紧固件由所述基部支撑并从所述第一表面突出,所述多个第一紧固件被构造为接合所述手术器械,以便将所述接口结构保持到所述手术器械;
所述接口结构还被构造为接合所述手术机器人臂,以便将所述接口结构保持到所述手术机器人臂,
其中,所述多个第一紧固件和所述接口结构的剩余部分被成形为使得所述接口结构比所述器械接口元件附接到所述驱动组件接口元件时更牢固地附接到所述手术机器人臂,使得在所述手术器械从所述手术机器人臂拆卸时,所述接口结构被保持到所述手术机器人臂。
2.根据权利要求1所述的手术机器人,其中,各个所述第一紧固件包括主体和从所述主体的突起,所述突起被构造为接合所述手术器械的尖头。
3.根据权利要求2所述的手术机器人,其中,对于各个所述第一紧固件,所述突起与所述基部的平面平行,并且/或者,所述突起包括一对突出元件,所述一对突出元件被成形为结合起来保持所述手术器械的所述尖头。
4.根据权利要求1或2所述的手术机器人,其中,所述多个第一紧固件被成形为在所述手术器械被附接到所述接口结构时,阻止所述手术器械沿与所述手术机器人臂的终端连杆的轴向方向垂直的方向相对于所述接口结构移动,并且/或者,其中,所述多个第一紧固件被成形为在所述手术器械附接到所述手术机器人臂时,阻止所述手术器械沿所述手术机器人臂的终端连杆的所述轴向方向相对于所述手术机器人臂移动。
5.根据权利要求1或2所述的手术机器人,其中,在所述接口结构附接到所述手术机器人臂时,所述基部与所述手术机器人臂的终端连杆的轴向方向平行,并且/或者,所述接口结构还包括在所述第一表面上的对齐特征,这些对齐特征用于在所述手术器械与所述手术机器人臂接合期间辅助对齐。
6.根据权利要求1或2所述的手术机器人,其中,所述基部包括具有所述第一表面和所述第二表面的外缘,所述外缘包围中空内部。
7.根据权利要求6所述的手术机器人,所述接口结构还包括附接到所述基部的所述外缘的后边缘的后翼部,所述后翼部被构造为覆盖所述手术机器人臂的近端暴露面。
8.根据权利要求7所述的手术机器人,其中,所述后翼部远离所述手术机器人臂的远端相对于所述基部成角度,并且/或者,其中,所述后翼部包括用于紧固到所述手术机器人臂的所述近端暴露面的一个或更多个第三紧固件。
9.根据权利要求7所述的手术机器人,其中,所述后翼部和所述基部一体形成,或者,其中所述后翼部围绕所述基部的所述外缘的所述后边缘以可枢转的方式连接到所述基部。
10.根据权利要求6所述的手术机器人,所述接口结构还包括附接到所述基部的所述外缘的前边缘的前翼部,所述前翼部被构造为覆盖所述手术机器人臂的远端暴露面。
11.根据权利要求10所述的手术机器人,其中,所述前翼部和所述基部一体形成,或者,其中,所述前翼部围绕所述基部的所述外缘的所述前边缘以可枢转的方式连接到所述基部。
12.根据权利要求10所述的手术机器人,其中,所述前翼部包括用于紧固到所述手术机器人臂的所述远端暴露面的一个或更多个第四紧固件。
13.根据权利要求12所述的手术机器人,其中,各个第四紧固件包括主体和从所述主体的突起,所述突起被构造为保持在所述手术机器人臂中的凹部中。
14.根据权利要求1或2所述的手术机器人,所述接口结构还包括包封部,该包封部连接所述基部的相对边缘,以便当接合在所述手术机器人臂上时,将所述接口结构保持到所述手术机器人臂,其中,所述多个第一紧固件和所述包封部被成形为使得在从所述手术机器人臂拆卸所述手术器械时,所述接口结构被保持到所述手术机器人臂。
15.根据权利要求14所述的手术机器人,其中,所述包封部被成形为,当所述接口结构接合在所述手术机器人臂上时,所述包封部外切所述手术机器人臂的外部表面。
16.根据权利要求14所述的手术机器人,其中,所述基部和所述包封部一体形成,并且/或者,其中,所述包封部的内部表面具有带肋轮廓。
17.根据权利要求14所述的手术机器人,其中,所述接口结构还包括附接到所述基部的外缘的前边缘的前翼部,该前翼部被构造为覆盖所述手术机器人臂的远端暴露面,所述前翼部的内部表面包括偏置材料,当所述接口结构接合在所述手术机器人臂上时,所述偏置材料偏置所述接口结构使之抵靠所述手术机器人臂。
18.根据权利要求1或2所述的手术机器人,所述接口结构还包括多个第二紧固件,所述多个第二紧固件沿与所述第一紧固件相反的方向突出,所述多个第二紧固件被构造为接合所述手术机器人臂,以便将所述接口结构保持到所述手术机器人臂,其中,所述多个第一紧固件和所述多个第二紧固件被成形为使得当从所述手术机器人臂拆卸所述手术器械时,所述接口结构被保持到所述手术机器人臂。
19.根据权利要求6所述的手术机器人,其中,所述接口结构的内边界终止于膜中,该膜在所述中空内部上方延伸。
20.根据权利要求1所述的手术机器人,所述手术器械还包括:
轴;
位于所述轴的远端处的手术末端执行器;以及
位于所述轴的近端处的对接部,该对接部用于经由接口结构对接手术机器人臂,所述对接部包括:主体,该主体被构造为接合所述接口结构的第一紧固件;和接合部,所述接合部与所述轴的轴向方向横切地相对于所述主体能够位移,其中,所述接合部朝向采用其可位移范围的最远离所述轴的端部处的位置偏置。
21.根据权利要求20所述的手术机器人,其中,所述接合部包括多个尖头,各个尖头被构造为在所述接合部采用其可位移范围的最远离所述轴的端部处的所述位置时与所述接口结构的第一紧固件接合。
22.根据权利要求21所述的手术机器人,其中,所述接合部被构造为在所述接合部采用其可位移范围的最靠近所述轴的端部处的位置时与所述接口结构的各个所述第一紧固件分离。
23.根据权利要求20或21所述的手术机器人,其中,所述接合部被弹簧加载为将其位置朝向其可位移范围的最远离所述轴的所述端部的位置偏置。
24.根据权利要求20或21所述的手术机器人,其中,所述接合部包括第一凹部,并且所述主体包括第二凹部,所述第一凹部和第二凹部同轴且所述第一凹部和第二凹部横向于所述轴的所述轴向方向,所述手术器械还包括被部分地收容在所述第一凹部且部分地收容在所述第二凹部中的销,以便约束所述接合部横向于所述轴的所述轴向方向、相对于所述主体的运动。
25.根据权利要求20或21所述的手术机器人,所述手术器械还包括无线发送器,该无线发送器用于向所述接口结构发送无线传输。
26.根据权利要求1所述的手术机器人,其中,所述手术机器人臂还包括:
基座;和
一系列关节,所述一系列关节在所述手术机器人臂的远端处将所述基座连接到对接部,所述一系列关节使得所述对接部能够相对于所述基座铰接;
所述对接部,所述对接部被构造为通过保持所述接口结构而对接手术器械。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202210852846.2A CN115137488A (zh) | 2016-09-14 | 2017-09-14 | 对接手术机器人臂与器械 |
| CN202210845386.0A CN115105214A (zh) | 2016-09-14 | 2017-09-14 | 对接手术机器人臂与器械 |
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| GB1615616.8 | 2016-09-14 | ||
| GBGB1615616.8A GB201615616D0 (en) | 2016-09-14 | 2016-09-14 | Interfacing a surgical robotic arm and instrument |
| GB1709016.8 | 2017-06-06 | ||
| GB1709016.8A GB2553879B (en) | 2016-09-14 | 2017-06-06 | Interfacing a surgical robotic arm and instrument |
| PCT/GB2017/052709 WO2018051093A1 (en) | 2016-09-14 | 2017-09-14 | Interfacing a surgical robotic arm and instrument |
Related Child Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202210845386.0A Division CN115105214A (zh) | 2016-09-14 | 2017-09-14 | 对接手术机器人臂与器械 |
| CN202210852846.2A Division CN115137488A (zh) | 2016-09-14 | 2017-09-14 | 对接手术机器人臂与器械 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN109688962A CN109688962A (zh) | 2019-04-26 |
| CN109688962B true CN109688962B (zh) | 2022-08-05 |
Family
ID=57234443
Family Applications (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202210852846.2A Pending CN115137488A (zh) | 2016-09-14 | 2017-09-14 | 对接手术机器人臂与器械 |
| CN201780056182.6A Active CN109688962B (zh) | 2016-09-14 | 2017-09-14 | 对接手术机器人臂与器械 |
| CN202210845386.0A Pending CN115105214A (zh) | 2016-09-14 | 2017-09-14 | 对接手术机器人臂与器械 |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202210852846.2A Pending CN115137488A (zh) | 2016-09-14 | 2017-09-14 | 对接手术机器人臂与器械 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202210845386.0A Pending CN115105214A (zh) | 2016-09-14 | 2017-09-14 | 对接手术机器人臂与器械 |
Country Status (6)
| Country | Link |
|---|---|
| US (3) | US11547501B2 (zh) |
| EP (1) | EP3512454A1 (zh) |
| JP (2) | JP7164848B2 (zh) |
| CN (3) | CN115137488A (zh) |
| GB (4) | GB201615616D0 (zh) |
| WO (1) | WO2018051093A1 (zh) |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB201615616D0 (en) * | 2016-09-14 | 2016-10-26 | Cambridge Medical Robotics Ltd | Interfacing a surgical robotic arm and instrument |
| GB2570518B8 (en) * | 2018-01-30 | 2023-05-24 | Cmr Surgical Ltd | Interfacing a surgical robotic arm and instrument |
| GB2585727B8 (en) * | 2018-01-30 | 2023-05-24 | Cmr Surgical Ltd | Interfacing a surgical robotic arm and instrument |
| GB2570520B8 (en) * | 2018-01-30 | 2023-05-24 | Cmr Surgical Ltd | Interfacing a surgical robotic arm and instrument |
| EP3773312A4 (en) * | 2018-04-06 | 2022-04-13 | Project Moray, Inc. | Improved fluidic drivers, devices, methods, and systems for catheters and other uses |
| USD910186S1 (en) | 2019-02-28 | 2021-02-09 | Cmr Surgical Limited | Structure for interfacing a surgical robotic arm and instrument |
| KR102269772B1 (ko) * | 2019-03-13 | 2021-06-28 | 큐렉소 주식회사 | 수술용 로봇의 엔드이펙터 |
| US11523822B2 (en) * | 2019-06-28 | 2022-12-13 | Cilag Gmbh International | Battery pack including a circuit interrupter |
| JP6762592B1 (ja) * | 2019-12-20 | 2020-09-30 | リバーフィールド株式会社 | 医療用ロボットおよび医療用ロボットの装着部 |
| EP3865083A4 (en) * | 2019-12-20 | 2021-11-24 | Riverfield Inc. | MEDICAL ROBOT, SURGICAL INSTRUMENT AND ASSEMBLY PART |
| CN115087410B (zh) * | 2020-04-02 | 2023-05-16 | 瑞德医疗机器股份有限公司 | 轴承构造以及具备轴承构造的包覆单元 |
| KR102443789B1 (ko) * | 2021-12-08 | 2022-09-19 | 주식회사 메디인테크 | 동력수용체에 의해 제어되는 내시경 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102018573A (zh) * | 2010-11-04 | 2011-04-20 | 燕山大学 | 微创血管介入手术机器人导管推拉装置 |
| CN102551815A (zh) * | 2010-11-09 | 2012-07-11 | Tyco医疗健康集团 | 用于微创手术的悬吊系统 |
Family Cites Families (60)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5814038A (en) * | 1995-06-07 | 1998-09-29 | Sri International | Surgical manipulator for a telerobotic system |
| AU2997095A (en) * | 1995-06-20 | 1997-01-22 | Wan Sing Ng | Articulated arm for medical procedures |
| US8206406B2 (en) * | 1996-12-12 | 2012-06-26 | Intuitive Surgical Operations, Inc. | Disposable sterile surgical adaptor |
| US7699855B2 (en) * | 1996-12-12 | 2010-04-20 | Intuitive Surgical Operations, Inc. | Sterile surgical adaptor |
| US8182469B2 (en) * | 1997-11-21 | 2012-05-22 | Intuitive Surgical Operations, Inc. | Surgical accessory clamp and method |
| US7666191B2 (en) * | 1996-12-12 | 2010-02-23 | Intuitive Surgical, Inc. | Robotic surgical system with sterile surgical adaptor |
| US8529582B2 (en) * | 1996-12-12 | 2013-09-10 | Intuitive Surgical Operations, Inc. | Instrument interface of a robotic surgical system |
| US6949106B2 (en) * | 1998-02-24 | 2005-09-27 | Endovia Medical, Inc. | Surgical instrument |
| US6620111B2 (en) * | 2001-04-20 | 2003-09-16 | Ethicon Endo-Surgery, Inc. | Surgical biopsy device having automatic rotation of the probe for taking multiple samples |
| AU2003218696A1 (en) * | 2002-03-19 | 2003-09-29 | Bard Dublin Itc Limited | Biopsy device and biopsy needle module that can be inserted into the biopsy device |
| US8244327B2 (en) * | 2002-04-22 | 2012-08-14 | The Johns Hopkins University | Apparatus for insertion of a medical device during a medical imaging process |
| US7331967B2 (en) | 2002-09-09 | 2008-02-19 | Hansen Medical, Inc. | Surgical instrument coupling mechanism |
| US7690160B2 (en) * | 2004-07-23 | 2010-04-06 | Moller Jr Jorgen J | Modular floor tile system with transition edge |
| US20060074344A1 (en) * | 2004-09-29 | 2006-04-06 | Hibner John A | Fluid control for biopsy device |
| US7854707B2 (en) * | 2005-08-05 | 2010-12-21 | Devicor Medical Products, Inc. | Tissue sample revolver drum biopsy device |
| US9114252B2 (en) * | 2005-12-02 | 2015-08-25 | University Of Rochester | Image-guided therapy delivery and diagnostic needle system |
| US7955322B2 (en) * | 2005-12-20 | 2011-06-07 | Intuitive Surgical Operations, Inc. | Wireless communication in a robotic surgical system |
| JP5101519B2 (ja) * | 2005-12-20 | 2012-12-19 | インテュイティブ サージカル インコーポレイテッド | ロボット手術システムの機器インターフェース |
| EP1815949A1 (en) * | 2006-02-03 | 2007-08-08 | The European Atomic Energy Community (EURATOM), represented by the European Commission | Medical robotic system with manipulator arm of the cylindrical coordinate type |
| US8945148B2 (en) * | 2007-06-13 | 2015-02-03 | Intuitive Surgical Operations, Inc. | Surgical system instrument manipulator |
| US9211160B2 (en) * | 2008-01-16 | 2015-12-15 | Luiz Geraldo Pivotto | Remotely controlled catheter insertion system with automatic control system |
| US7886743B2 (en) * | 2008-03-31 | 2011-02-15 | Intuitive Surgical Operations, Inc. | Sterile drape interface for robotic surgical instrument |
| US9339342B2 (en) * | 2008-09-30 | 2016-05-17 | Intuitive Surgical Operations, Inc. | Instrument interface |
| US8720448B2 (en) * | 2008-11-07 | 2014-05-13 | Hansen Medical, Inc. | Sterile interface apparatus |
| WO2013069019A2 (en) * | 2011-11-08 | 2013-05-16 | Valtech Cardio, Ltd. | Controlled steering functionality for implant-delivery tool |
| US8979871B2 (en) * | 2009-08-13 | 2015-03-17 | Monteris Medical Corporation | Image-guided therapy of a tissue |
| WO2011037394A2 (ko) * | 2009-09-23 | 2011-03-31 | 주식회사 이턴 | 멸균 어댑터, 휠의 체결 구조 및 수술용 인스트루먼트의 체결 구조 |
| US20120259325A1 (en) * | 2009-10-09 | 2012-10-11 | Houser Kevin L | Laparoscopic Instrument with Attachable Energy End Effector |
| EP2503951B1 (en) * | 2009-11-27 | 2025-01-01 | Centre for Surgical Invention & Innovation | Automated in-bore mr guided robotic diagnostic and therapeutic system |
| ITFI20110114A1 (it) * | 2011-05-31 | 2012-12-01 | Scuola Superiore Di Studi Universit Arie Di Perfe | Piattaforma robotica per chirurgia mininvasiva |
| JP6218733B2 (ja) * | 2011-09-19 | 2017-10-25 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | 統合mr撮像及び介入システム |
| US8912746B2 (en) * | 2011-10-26 | 2014-12-16 | Intuitive Surgical Operations, Inc. | Surgical instrument motor pack latch |
| US9333040B2 (en) * | 2012-02-02 | 2016-05-10 | Transenterix Surgical, Inc. | Mechanized multi-instrument surgical system |
| US20130218005A1 (en) * | 2012-02-08 | 2013-08-22 | University Of Maryland, Baltimore | Minimally invasive neurosurgical intracranial robot system and method |
| CN104622577B (zh) * | 2012-04-27 | 2017-11-21 | 库卡实验仪器有限公司 | 机器人手术系统 |
| US20130317519A1 (en) * | 2012-05-25 | 2013-11-28 | Hansen Medical, Inc. | Low friction instrument driver interface for robotic systems |
| US9198714B2 (en) * | 2012-06-29 | 2015-12-01 | Ethicon Endo-Surgery, Inc. | Haptic feedback devices for surgical robot |
| EP2881067B1 (de) * | 2012-07-03 | 2019-11-20 | KUKA Deutschland GmbH | Chirurgische Instrumentenanordnung und Antriebsstranganordnung für ein, insbesondere robotergeführtes, chirurgisches Instrument und chirurgisches Instrument |
| US9839481B2 (en) * | 2013-03-07 | 2017-12-12 | Intuitive Surgical Operations, Inc. | Hybrid manual and robotic interventional instruments and methods of use |
| US20140263541A1 (en) * | 2013-03-14 | 2014-09-18 | Ethicon Endo-Surgery, Inc. | Articulatable surgical instrument comprising an articulation lock |
| US9498291B2 (en) * | 2013-03-15 | 2016-11-22 | Hansen Medical, Inc. | Touch-free catheter user interface controller |
| ITMI20130516A1 (it) * | 2013-04-05 | 2014-10-06 | Sofar Spa | Sistema chirurgico con teli sterili |
| US8978871B1 (en) * | 2013-05-22 | 2015-03-17 | Amazon Technologies, Inc. | Conveyor system |
| WO2014204930A2 (en) * | 2013-06-17 | 2014-12-24 | Children's National Medical Center | Patient mounted mri and ct compatible robot for needle guidance in interventional procedures |
| WO2015010189A1 (en) * | 2013-07-24 | 2015-01-29 | Centre For Surgical Invention & Innovation | Multi-function mounting interface for an image-guided robotic system and quick release interventional toolset |
| CN108784838B (zh) * | 2013-08-15 | 2021-06-08 | 直观外科手术操作公司 | 器械无菌适配器驱动接口 |
| US9724493B2 (en) * | 2013-08-27 | 2017-08-08 | Catheter Precision, Inc. | Components and methods for balancing a catheter controller system with a counterweight |
| JP6656148B2 (ja) * | 2013-10-24 | 2020-03-04 | オーリス ヘルス インコーポレイテッド | ロボット支援管腔内手術のためのシステムおよび関連する方法 |
| CN118078451A (zh) * | 2014-03-17 | 2024-05-28 | 直观外科手术操作公司 | 手术器械与远程操作致动器之间的无菌屏障 |
| DE102014117408A1 (de) * | 2014-11-27 | 2016-06-02 | avateramedical GmBH | Vorrichtung zur robotergestützten Chirurgie |
| CA2968609C (en) * | 2014-12-11 | 2017-09-26 | Titan Medical Inc. | Actuator and drive for manipulating a tool |
| US10420620B2 (en) * | 2015-03-10 | 2019-09-24 | Covidien Lp | Robotic surgical systems, instrument drive units, and drive assemblies |
| GB2538326B (en) * | 2015-05-07 | 2019-06-05 | Cmr Surgical Ltd | A surgical drape for transferring drive |
| JP6141569B2 (ja) * | 2015-06-01 | 2017-06-07 | オリンパス株式会社 | 医療用マニピュレータ |
| US10258419B2 (en) * | 2015-09-25 | 2019-04-16 | Ethicon Llc | Methods for hybrid robotic laparoscopic surgery |
| GB201521805D0 (en) | 2015-12-10 | 2016-01-27 | Cambridge Medical Robotics Ltd | Guiding engagement of a robot arm and surgical instrument |
| GB201521811D0 (en) * | 2015-12-10 | 2016-01-27 | Cambridge Medical Robotics Ltd | Drive assembly interface |
| CN205514900U (zh) * | 2016-01-14 | 2016-08-31 | 上银科技股份有限公司 | 手术器械转接装置 |
| GB201615616D0 (en) * | 2016-09-14 | 2016-10-26 | Cambridge Medical Robotics Ltd | Interfacing a surgical robotic arm and instrument |
| GB2597385B (en) * | 2016-07-29 | 2022-06-08 | Cmr Surgical Ltd | Interface structure |
-
2016
- 2016-09-14 GB GBGB1615616.8A patent/GB201615616D0/en not_active Ceased
-
2017
- 2017-06-06 GB GB1801210.4A patent/GB2556554B8/en active Active
- 2017-06-06 GB GB2202571.2A patent/GB2601269B/en not_active Expired - Fee Related
- 2017-06-06 GB GB1709016.8A patent/GB2553879B/en active Active
- 2017-09-14 CN CN202210852846.2A patent/CN115137488A/zh active Pending
- 2017-09-14 JP JP2019535990A patent/JP7164848B2/ja active Active
- 2017-09-14 US US16/333,081 patent/US11547501B2/en active Active
- 2017-09-14 WO PCT/GB2017/052709 patent/WO2018051093A1/en unknown
- 2017-09-14 CN CN201780056182.6A patent/CN109688962B/zh active Active
- 2017-09-14 CN CN202210845386.0A patent/CN115105214A/zh active Pending
- 2017-09-14 EP EP17771538.0A patent/EP3512454A1/en active Pending
-
2022
- 2022-06-30 JP JP2022106488A patent/JP7571085B2/ja active Active
- 2022-11-14 US US18/055,101 patent/US12193773B2/en active Active
- 2022-11-14 US US18/055,106 patent/US12137994B2/en active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102018573A (zh) * | 2010-11-04 | 2011-04-20 | 燕山大学 | 微创血管介入手术机器人导管推拉装置 |
| CN102551815A (zh) * | 2010-11-09 | 2012-07-11 | Tyco医疗健康集团 | 用于微创手术的悬吊系统 |
Also Published As
| Publication number | Publication date |
|---|---|
| US12193773B2 (en) | 2025-01-14 |
| GB2553879A (en) | 2018-03-21 |
| JP7571085B2 (ja) | 2024-10-22 |
| US20230074346A1 (en) | 2023-03-09 |
| CN115105214A (zh) | 2022-09-27 |
| US12137994B2 (en) | 2024-11-12 |
| JP2022121642A (ja) | 2022-08-19 |
| GB2556554B (en) | 2022-04-06 |
| WO2018051093A1 (en) | 2018-03-22 |
| GB2556554A8 (en) | 2023-11-29 |
| GB201709016D0 (en) | 2017-07-19 |
| JP7164848B2 (ja) | 2022-11-02 |
| CN109688962A (zh) | 2019-04-26 |
| GB2601269B (en) | 2022-10-12 |
| GB2556554B8 (en) | 2023-11-29 |
| GB2553879B (en) | 2022-08-10 |
| US20190269471A1 (en) | 2019-09-05 |
| GB201615616D0 (en) | 2016-10-26 |
| GB202202571D0 (en) | 2022-04-13 |
| GB201801210D0 (en) | 2018-03-14 |
| JP2019529020A (ja) | 2019-10-17 |
| US20230072227A1 (en) | 2023-03-09 |
| CN115137488A (zh) | 2022-10-04 |
| GB2601269A (en) | 2022-05-25 |
| EP3512454A1 (en) | 2019-07-24 |
| GB2556554A (en) | 2018-05-30 |
| US11547501B2 (en) | 2023-01-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN109688962B (zh) | 对接手术机器人臂与器械 | |
| CN111970987B (zh) | 将手术机械臂与器械对接 | |
| JP7309733B2 (ja) | 手術用ロボットアームと器具とのインターフェース接続 | |
| US11547502B2 (en) | Mounting an endoscope to a surgical robot | |
| US11241289B2 (en) | Packaging insert |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| CB03 | Change of inventor or designer information |
Inventor after: K. Marshall Inventor after: N.P.S-L. Holchende Inventor after: T.B. Jackson Inventor after: J.P. Witler Inventor after: D. M. McBrien Inventor before: K. Marshall Inventor before: N.P.S-L. Holchende Inventor before: T.B. Jackson Inventor before: J.P. Witler Inventor before: M. McBrian |
|
| CB03 | Change of inventor or designer information |