CN109064433B - 改进的hdr图像编码和解码方法及设备 - Google Patents
改进的hdr图像编码和解码方法及设备 Download PDFInfo
- Publication number
- CN109064433B CN109064433B CN201811139858.0A CN201811139858A CN109064433B CN 109064433 B CN109064433 B CN 109064433B CN 201811139858 A CN201811139858 A CN 201811139858A CN 109064433 B CN109064433 B CN 109064433B
- Authority
- CN
- China
- Prior art keywords
- image
- hdr
- ldr
- color
- luminance
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims abstract description 37
- 238000013507 mapping Methods 0.000 claims abstract description 212
- 238000012545 processing Methods 0.000 claims abstract description 64
- 235000019557 luminance Nutrition 0.000 claims description 175
- 239000003086 colorant Substances 0.000 claims description 109
- 230000008859 change Effects 0.000 claims description 36
- 230000008569 process Effects 0.000 claims description 10
- 238000004422 calculation algorithm Methods 0.000 abstract description 40
- 230000006870 function Effects 0.000 description 121
- 241000023320 Luma <angiosperm> Species 0.000 description 60
- OSWPMRLSEDHDFF-UHFFFAOYSA-N methyl salicylate Chemical compound COC(=O)C1=CC=CC=C1O OSWPMRLSEDHDFF-UHFFFAOYSA-N 0.000 description 55
- 238000009877 rendering Methods 0.000 description 51
- 238000013139 quantization Methods 0.000 description 24
- 230000000694 effects Effects 0.000 description 20
- 230000009466 transformation Effects 0.000 description 19
- 230000006399 behavior Effects 0.000 description 17
- 230000000875 corresponding effect Effects 0.000 description 15
- 229920006395 saturated elastomer Polymers 0.000 description 13
- 238000009795 derivation Methods 0.000 description 12
- 238000004364 calculation method Methods 0.000 description 11
- 238000005516 engineering process Methods 0.000 description 11
- 230000009471 action Effects 0.000 description 10
- 230000001419 dependent effect Effects 0.000 description 10
- 230000004438 eyesight Effects 0.000 description 10
- 238000005286 illumination Methods 0.000 description 10
- 238000010191 image analysis Methods 0.000 description 10
- 238000004458 analytical method Methods 0.000 description 9
- 238000009125 cardiac resynchronization therapy Methods 0.000 description 9
- 210000004556 brain Anatomy 0.000 description 8
- 238000005259 measurement Methods 0.000 description 8
- 230000000007 visual effect Effects 0.000 description 8
- 238000013461 design Methods 0.000 description 7
- 230000001815 facial effect Effects 0.000 description 7
- 230000003993 interaction Effects 0.000 description 7
- 238000012937 correction Methods 0.000 description 6
- 210000000887 face Anatomy 0.000 description 6
- 238000000926 separation method Methods 0.000 description 6
- 238000003860 storage Methods 0.000 description 6
- 238000000844 transformation Methods 0.000 description 6
- 241000282412 Homo Species 0.000 description 5
- 210000004027 cell Anatomy 0.000 description 5
- 238000004891 communication Methods 0.000 description 5
- 238000009826 distribution Methods 0.000 description 5
- 230000004048 modification Effects 0.000 description 5
- 238000012986 modification Methods 0.000 description 5
- 102100028188 Cystatin-F Human genes 0.000 description 4
- 101710169749 Cystatin-F Proteins 0.000 description 4
- 235000017899 Spathodea campanulata Nutrition 0.000 description 4
- 230000004913 activation Effects 0.000 description 4
- 238000001994 activation Methods 0.000 description 4
- 238000012512 characterization method Methods 0.000 description 4
- 238000004590 computer program Methods 0.000 description 4
- 238000003384 imaging method Methods 0.000 description 4
- 230000000670 limiting effect Effects 0.000 description 4
- 238000005457 optimization Methods 0.000 description 4
- 230000036961 partial effect Effects 0.000 description 4
- 230000009467 reduction Effects 0.000 description 4
- 239000007787 solid Substances 0.000 description 4
- 108010003730 Cone Opsins Proteins 0.000 description 3
- 108091028140 FREP Proteins 0.000 description 3
- 238000013459 approach Methods 0.000 description 3
- 230000003247 decreasing effect Effects 0.000 description 3
- 238000007667 floating Methods 0.000 description 3
- 239000011521 glass Substances 0.000 description 3
- 230000006872 improvement Effects 0.000 description 3
- 239000000463 material Substances 0.000 description 3
- 238000007620 mathematical function Methods 0.000 description 3
- 239000000203 mixture Substances 0.000 description 3
- 230000007935 neutral effect Effects 0.000 description 3
- 230000002829 reductive effect Effects 0.000 description 3
- 230000002441 reversible effect Effects 0.000 description 3
- 238000012360 testing method Methods 0.000 description 3
- 230000001131 transforming effect Effects 0.000 description 3
- 230000037303 wrinkles Effects 0.000 description 3
- 241000196324 Embryophyta Species 0.000 description 2
- 208000003098 Ganglion Cysts Diseases 0.000 description 2
- 241001637516 Polygonia c-album Species 0.000 description 2
- 241001085205 Prenanthella exigua Species 0.000 description 2
- 208000005400 Synovial Cyst Diseases 0.000 description 2
- 238000010521 absorption reaction Methods 0.000 description 2
- 230000004308 accommodation Effects 0.000 description 2
- 230000002776 aggregation Effects 0.000 description 2
- 238000004220 aggregation Methods 0.000 description 2
- 230000005540 biological transmission Effects 0.000 description 2
- 238000004061 bleaching Methods 0.000 description 2
- 238000006243 chemical reaction Methods 0.000 description 2
- 230000000295 complement effect Effects 0.000 description 2
- 239000013256 coordination polymer Substances 0.000 description 2
- 238000000354 decomposition reaction Methods 0.000 description 2
- 238000001514 detection method Methods 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 230000009977 dual effect Effects 0.000 description 2
- 230000007613 environmental effect Effects 0.000 description 2
- 238000011156 evaluation Methods 0.000 description 2
- 238000009472 formulation Methods 0.000 description 2
- 230000004313 glare Effects 0.000 description 2
- 230000000116 mitigating effect Effects 0.000 description 2
- 230000036651 mood Effects 0.000 description 2
- 230000000802 nitrating effect Effects 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- 238000005192 partition Methods 0.000 description 2
- 238000007639 printing Methods 0.000 description 2
- 238000005070 sampling Methods 0.000 description 2
- 238000004088 simulation Methods 0.000 description 2
- 230000007704 transition Effects 0.000 description 2
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 2
- 101100165918 Caenorhabditis elegans cam-1 gene Proteins 0.000 description 1
- 241000212941 Glehnia Species 0.000 description 1
- PEDCQBHIVMGVHV-UHFFFAOYSA-N Glycerine Chemical compound OCC(O)CO PEDCQBHIVMGVHV-UHFFFAOYSA-N 0.000 description 1
- 101000616761 Homo sapiens Single-minded homolog 2 Proteins 0.000 description 1
- DGAQECJNVWCQMB-PUAWFVPOSA-M Ilexoside XXIX Chemical compound C[C@@H]1CC[C@@]2(CC[C@@]3(C(=CC[C@H]4[C@]3(CC[C@@H]5[C@@]4(CC[C@@H](C5(C)C)OS(=O)(=O)[O-])C)C)[C@@H]2[C@]1(C)O)C)C(=O)O[C@H]6[C@@H]([C@H]([C@@H]([C@H](O6)CO)O)O)O.[Na+] DGAQECJNVWCQMB-PUAWFVPOSA-M 0.000 description 1
- 244000141359 Malus pumila Species 0.000 description 1
- 241001465754 Metazoa Species 0.000 description 1
- 102100021825 Single-minded homolog 2 Human genes 0.000 description 1
- 238000009825 accumulation Methods 0.000 description 1
- 230000003044 adaptive effect Effects 0.000 description 1
- 238000007792 addition Methods 0.000 description 1
- 239000000654 additive Substances 0.000 description 1
- 230000000996 additive effect Effects 0.000 description 1
- 230000003466 anti-cipated effect Effects 0.000 description 1
- 235000021016 apples Nutrition 0.000 description 1
- 238000000149 argon plasma sintering Methods 0.000 description 1
- 238000003491 array Methods 0.000 description 1
- 230000002238 attenuated effect Effects 0.000 description 1
- 238000003287 bathing Methods 0.000 description 1
- 238000005452 bending Methods 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 238000004040 coloring Methods 0.000 description 1
- 230000001143 conditioned effect Effects 0.000 description 1
- 235000009508 confectionery Nutrition 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 230000002596 correlated effect Effects 0.000 description 1
- 238000013211 curve analysis Methods 0.000 description 1
- 238000005520 cutting process Methods 0.000 description 1
- 238000013500 data storage Methods 0.000 description 1
- 230000007547 defect Effects 0.000 description 1
- 238000002845 discoloration Methods 0.000 description 1
- 239000003814 drug Substances 0.000 description 1
- 229940079593 drug Drugs 0.000 description 1
- 230000002996 emotional effect Effects 0.000 description 1
- 238000002474 experimental method Methods 0.000 description 1
- 125000001475 halogen functional group Chemical group 0.000 description 1
- 230000036541 health Effects 0.000 description 1
- 230000002427 irreversible effect Effects 0.000 description 1
- 210000003127 knee Anatomy 0.000 description 1
- 238000002372 labelling Methods 0.000 description 1
- 238000011068 loading method Methods 0.000 description 1
- 230000005415 magnetization Effects 0.000 description 1
- 238000007726 management method Methods 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- QSHDDOUJBYECFT-UHFFFAOYSA-N mercury Chemical compound [Hg] QSHDDOUJBYECFT-UHFFFAOYSA-N 0.000 description 1
- 229910052753 mercury Inorganic materials 0.000 description 1
- 229910052751 metal Inorganic materials 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 210000002569 neuron Anatomy 0.000 description 1
- 210000004279 orbit Anatomy 0.000 description 1
- 238000012856 packing Methods 0.000 description 1
- 239000003973 paint Substances 0.000 description 1
- 239000002245 particle Substances 0.000 description 1
- 239000000049 pigment Substances 0.000 description 1
- 238000012805 post-processing Methods 0.000 description 1
- 238000007781 pre-processing Methods 0.000 description 1
- 239000002243 precursor Substances 0.000 description 1
- 244000062645 predators Species 0.000 description 1
- 238000003672 processing method Methods 0.000 description 1
- 238000002310 reflectometry Methods 0.000 description 1
- 230000001105 regulatory effect Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 210000001525 retina Anatomy 0.000 description 1
- 230000011218 segmentation Effects 0.000 description 1
- 230000035807 sensation Effects 0.000 description 1
- 235000019615 sensations Nutrition 0.000 description 1
- 230000035945 sensitivity Effects 0.000 description 1
- 229910052708 sodium Inorganic materials 0.000 description 1
- 239000011734 sodium Substances 0.000 description 1
- 230000003595 spectral effect Effects 0.000 description 1
- 238000001228 spectrum Methods 0.000 description 1
- 230000000638 stimulation Effects 0.000 description 1
- 239000000126 substance Substances 0.000 description 1
- 230000002123 temporal effect Effects 0.000 description 1
- 238000013519 translation Methods 0.000 description 1
- 230000007306 turnover Effects 0.000 description 1
- 239000002699 waste material Substances 0.000 description 1
Images





















Classifications
-
- G06T5/92—
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/90—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using coding techniques not provided for in groups H04N19/10-H04N19/85, e.g. fractals
- H04N19/98—Adaptive-dynamic-range coding [ADRC]
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N1/00—Scanning, transmission or reproduction of documents or the like, e.g. facsimile transmission; Details thereof
- H04N1/46—Colour picture communication systems
- H04N1/56—Processing of colour picture signals
- H04N1/60—Colour correction or control
- H04N1/6058—Reduction of colour to a range of reproducible colours, e.g. to ink- reproducible colour gamut
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/169—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding
- H04N19/186—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being a colour or a chrominance component
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/44—Decoders specially adapted therefor, e.g. video decoders which are asymmetric with respect to the encoder
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N5/00—Details of television systems
- H04N5/14—Picture signal circuitry for video frequency region
- H04N5/20—Circuitry for controlling amplitude response
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N9/00—Details of colour television systems
- H04N9/64—Circuits for processing colour signals
- H04N9/68—Circuits for processing colour signals for controlling the amplitude of colour signals, e.g. automatic chroma control circuits
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10024—Color image
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20092—Interactive image processing based on input by user
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20172—Image enhancement details
- G06T2207/20208—High dynamic range [HDR] image processing
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N1/00—Scanning, transmission or reproduction of documents or the like, e.g. facsimile transmission; Details thereof
- H04N1/46—Colour picture communication systems
- H04N1/64—Systems for the transmission or the storage of the colour picture signal; Details therefor, e.g. coding or decoding means therefor
Abstract
为了允许分级者针对各种呈现显示器制作HDR场景的最优样子内容,我们发明了一种图像编码器(202),包括:用于高动态范围输入图像(M_HDR)的输入(240);图像分级单元(201),其被布置成允许人类颜色分级者借助于人类确定的颜色映射算法来指定从根据预定义准确度所限定的高动态范围输入图像的表示(HDR_REP)至低动态范围图像(Im_LDR)的颜色映射,并且被布置成输出指定所述颜色映射(Fi(MP_DH))的数据;以及自动分级单元(203),其被布置成通过对高动态范围输入图像(M_HDR)或低动态范围图像(Im_LDR)之一应用自动颜色映射算法来导出第二低动态范围图像(GT_IDR)。我们还描述了在新出现的高动态范围图像操作技术中有用的感兴趣的新饱和度处理策略。
Description
本发明申请是一个分案申请,其原申请的国际申请日为2014年2月7日、申请号为201480009892.X,并且原申请的发明名称为“改进的HDR图像编码和解码方法及设备”。
技术领域
本发明涉及用于相比所谓低动态范围(LDR)图像的传统图像以增大的动态亮度范围对至少一个图像或视频的改进编码的装置和方法及得到的产品,如数据存储产品或例如存储在存储器中的编码信号。
背景技术
新出现的高动态范围(HDR)成像领域使自身有别于传统系统,如今相比之下我们能够将传统系统称作低动态范围(LDR)成像(其包括像以下这样的图像或视频编码系统:PAL或MPEG2、AVC、HEVC或MPEG家族的另一成员或类似的视频标准,如同例如VC1、VC2等或针对静止画面的JPEG等)。
在谈论HDR时,我们需要查看链(chain)的各种组件。因为这是非常新近的技术领域,其中也许不是每个人都有相同水平的领会,所以我们想要关于几个重要的定义快速地建立基准思维模式,以避免误解。最终,存在显示介质能够生成的呈现动态范围。呈现动态范围通常被定义为RDR=图像中的所有像素的(画面内RDR)或连续图像中的像素的(画面间RDR,例如在显示器(几乎)关断,并且人们仅看到周围环境在前面玻璃上的反射时)brightest_white_luminance/darkest_black_luminance。然而,当还耦合到peak_white值(即,brightest_white_luminance值)时这更有意义。LDR呈现器通常在由100 nit的peak_white限定的范围和大约100:1的动态范围内或其周围。这就是CRT显示器可能已经产生的,其中当然darkest_black_luminance非常依赖于观看环境照明,因此人们可以选取40:1以便安全可靠,并且当人们在阳光下观看显示器上的图像时2:1也能够是实用的动态范围。制约人类观看者明亮度调节的观看环境与这有关,例如典型地peak_white的20%。EBU、SMPTE等若干标准指定人们应当如何对视频信号分级使得能够以标准方式使用视频信号,例如如果在规定的观看环境下示出则它是最优的。对于分级,我们的意思是以改变的像素颜色来产生图像,所述改变的像素颜色是根据某种偏好而改变/指定的。例如,在向直接可用的显示相关编码给出呈现意图的情况下,摄像机能够自动对RAW摄像机画面分级(其只是依赖于作为线性亮度测量工具的摄像机细节),人们据此能够例如在基准条件下掌控这样的CRT显示器使得其将会向观看者示出整洁的画面。
由人类来分级常常牵涉到更多艺术挑选。例如,分级者想要使植物的颜色是漂亮的略带紫色,但是这需要在基准条件下指定(显示技术和观看环境两者,并且理论上还有影响观看者状态的其他条件,如药物吸收,但是当然人们典型地在很大程度上忽略这些),因为具体显示器可能使该颜色更偏浅蓝色,在这种情况下期望的艺术效果(创建美丽画面)可能消失。并不典型的是,摄像机自动创建最优类型的紫色,所以这就是分级者为什么用图像处理软件来这么做的原因。这样的分级者能够是摄影师或致力于电影的视觉艺术家两者,或者甚至是致力于(潜在地甚至是生活)电视节目的某人。当然,各种应用将会具有与针对这些应用的期望技术和/或艺术质量有关的各种程度的分级复杂性。典型地,以上标准规定分级应当在基准环境下在大约100 nit的基准监视器上进行。那么问题是,在实践中将如何呈现和感知颜色。印刷出版物的图形艺术家同样在基准条件下生成他们的作品以便具有某种共同点,并且例如避免打印机处不需要的错误源。然而,当然这并不意味着书籍或杂志的每个读者将会在经校准的D50照明器下阅读书籍,而是当在欠佳照明下在他的床上阅读时,他可能感知到更晦暗的颜色。当在当今可用的许多不同显示器之中的非基准显示器上示出电影或电视节目或消费者照片时,发生同样的情况。例如,图像(分级)可以被示出在500nit peak_white显示器上。那么发生的情况是,人们通过至少线性拉伸使所有像素颜色变亮,这是通过用分级来驱动显示器而发生的,即将最大白色(例如,值R=G=B=255)映射到显示器的peak_white(当然如果显示器具有特殊的原生电光转换功能EOTF,则对于各种图像像素颜色可能存在另外的明亮度失真,但是通常这是在内部操纵的以使显示器表现为如同基准CRT的更亮版本,即具有大约2.5的显示伽马)。
现在这种标准化的(在100 nit基准显示器上的基准环境以及其他中产生的)LDR分级能够用在一系列显示器和/或基准显示系统周围的环境条件(即,100 nit peak_white等)上(即看上去非常好,即仍然非常类似于它们在基准条件下看上去的那样)。这是因为,由于大脑是相对地工作的,所以大多数人并不对颜色的确切(绝对)样子如此吹毛求疵(例如,依赖于可允许性的准则,在不那么关键的更大部分人群开始反对之前,面部颜色作为比较关键的颜色之一可以从几乎白色的苍白变化到非常橙红等等),但也是因为对于许多对象而言没有人知道场景中的原始颜色是什么。部分地,这之所以如此还是因为,LDR场景是用“围绕平均”对象颜色策略(其尤其是用良好控制的棚内照明来实现的,关于我们现在拥有的各种飞行中内容可能不再总是如此)做出的,这意味着所有颜色都是生动的,人们甚至可以使图像在某种程度上变亮到18%等级以上,有一些阴影但并不太深或太重要等等,并且这在各种系统上在物理上和心理上都相当好地再现。这是例如天真的画家在他们发现诸如明暗对比等这样的复杂问题之前如何工作的。所以依赖于限定可接受的相似度的质量准则,LDR_100 nit分级可以用在例如从30 nit一直到600 nit的显示器以及从3x较不明亮到5x较明亮的观看环境上。使用级别的宽容度能够通过用所谓的显示变换修改它而提高。与涉及显示器色域约束的问题相比,显示器和环境的明亮度(涉及Stevens效应和Bartleson_Brenneman效应)能够明显更容易地被校正到合理程度,并且人们典型地能够用伽马函数或类似物来处理画面。例如在将显示器从暗淡环境移到黑暗环境(或实际上关断温馨的起居室观景灯)时,人们从1.25的超伽马改变到1.5,即人们使用剩余的伽马来提高所呈现的图像的对比度,因为人类视觉在黑暗中更敏感,所以将所呈现的图像的黑色感知成较为浅灰色,这相当于感知到的对比度的减小,其需要被补偿。类似的LDR技术是打印。当然有人并不对确定打印的peak_white的环境亮度具有先验控制,而是至少仅仅如同所有反射对象一样,白-黑RDR是大约100:1(依赖于纸张质量,例如光面对亚光,墨水等等)。
当人们需要在动态范围巨大并且典型地场景条件也与呈现条件非常不同的情况下再现场景的图像时,出现复杂性。 例如,在夜晚场景中,他们的眼睛可能正在看着在100.000 nit(或例如对于场景中的高压钠或汞照明器来说甚至更高)的车灯对几分之一nit的阴影中的黑暗区域之间的场景动态范围SDR。甚至在可能更难以从无孔不入的照明中创建黑暗阴影的日光下,室内可能典型地比室外暗100x,并且乌云、森林覆盖等也可能影响所需亮度(所捕获的或者要呈现的),如果不是在场景内,则至少在画面间,即时间连续再现。对于人类视觉的“原生动态范围”的引述在10.000:1与100.000:1之间,并且甚至在10.000:1与1.000.000:1之间变化,因为这当然依赖于条件(例如,人们是否需要在明亮中看到更暗的小区域,或反之亦然人们是否能够在黑暗中看到某个明亮的小对象,它也许部分地是视紫红质漂白(rhodopsin-bleaching);人们是否考虑一定量的眩光不适等;并且然后当然还存在心理因素[将这样的事情看作是某些对象的重要性、它们的喜好或充分的可视性、对观看者的情感冲击等],从而引起应当将它的多少呈现在显示器上的问题[例如,观看者可能因为“仅仅是黑色”而快速地放弃一个区块而不关心确切地是哪种黑色],倘若该观看者无论如何都处于完全不同的情况下[不见得是在度假,或不见得被警察用光晃照其面部],但是人们想要一定量的现实,这还可以是与例如电力消耗这样的其他因素的权衡,因此人们可以实际上务实地限定若干人类视觉动态范围,例如一个针对某种类型的实际场景观看,并且一个针对电视观看)。例如,如果一个人适应黑暗夜晚的天空,但是在眼睛的角落看到月亮,这对于视网膜其他地方的杆状体能够如何看到暗星来说具有较少影响,即“同时”可观看动态范围将会是高的。反之,当眼睛(在其视野的大面积上)沐浴在强烈日光下时,更难以区分通过小孔或窗户看到和照明的较暗内部中的较暗颜色,尤其是在明亮源与该黑暗区块相邻的情况下。那么光学系统将会示出若干眩光现象。事实上,大脑通常可能甚至并不关心该黑暗内部,并且仅仅是将所有这些颜色称作心理黑色。作为光的泄漏如何影响和确定从人类观察者角度来看的场景动态范围的另一示例,考虑在夜晚在灯杆后面被欠佳地照明的黑暗灌木丛。灯杆上的照明器在观看者的眼镜的刮痕(或者如果他没有佩戴眼镜,则是他眼睛透镜中的不规则性,例如,亚微颗粒、细胞之间的水……)上创建光散射轮廓,具体地作为围绕照明器的光晕,这降低了它后面的灌木丛的黑暗颜色的区分可能性。但是当观看者走动几秒时,照明器移到他后面,在眼睛透镜的捕获区之外,并且眼睛能够快速调整以找到黑暗中潜伏的捕食者。
所以,无论人们如何限定场景的有用动态范围来编码和呈现以便人类享用(人们甚至可以考虑并不仅仅用全局照明度缩放因子来编码画面内亮度,而是实际发生的亮度,从阳光明媚的热带环境到最黑暗的阴天夜晚),显然对于这些环境的忠实的或至少貌似合理的呈现需要远不止100:1。例如,我们希望对于暗淡环境在显示器上我们的最明亮对象为大约10000 nit,而我们的最暗为0.01 nit(或至少0.1 nit),至少如果我们在电影或(多个)图像中具有完全或大部分黑暗的场景的情况下我们例如将把灯减弱的话。
这就是HDR当选的地方。而且,当我们捕获这样的场景时,需要非常复杂的数学映射在LDR显示器上近似它(或甚至能够呈现它)(这实际上常常并不是很可能的)。例如,一些HDR至LDR映射算法使用局部调节来稍微平衡LDR中留下的主要呈现对象反射印象(即颜色)的照明场。鉴于从场景的较明亮部分向较黑暗部分的光泄漏(多次反射、散射等),不容易创建非常高的动态范围场景,但是在许多实际情形下能够容易地实现100:1的照明差异。例如,室内场景可以具有(当然依赖于房间的深度、窗户的尺寸和位置、墙壁的反射率等等)室外(照度)亮度的大约1/100th的分数或倍数(这也是建筑物灯光的日光因素如何被限定的)。当通过小裂缝等从洞穴内观看阳光明媚的户外时能够获得较高的SDR。此外,在显示器呈现侧,HDR范围起始于人们开始看到新外观概念的地方。例如,在像5000 nit SIM2显示器这样的明亮显示器上,人们在给定(正确地分级的)正确输入画面的情况下能够真实地呈现真实接通的灯或真实的阳光明媚风景的印象。与以上LDR范围不同,我们可以典型地说HDR是从大约1000 nit peak_white及以上针对正常电视起居室观看条件而开始的,但是更精确地,这还依赖于确切的观看条件(例如,电影院呈现,尽管用50 nit的peak_white,但已经示出相当一些HDR外观)。为了甚至更精确,鉴于眼睛和大脑调节,数值细节中像HDR的样子还将在某种程度上不仅仅依赖于物理亮度,还依赖于图像内容,即所挑选的分级。但是在任何情况下,在LDR呈现和HDR之间都存在清楚的区别,其中LDR呈现主要示出场景的晦暗无光版本,如同该场景被单一地照明并且仅示出对象反射,在HDR中叠加完全照亮的场外观。如果你然后能够呈现合理的黑色,例如1 nit或更低,则你就能够切实得到kx100:1的LDR对比度范围以上,其中k典型地为2-3(在接近-类似的具体范例下,即也许只有与场景亮度相比所显示的亮度的小对比度拉伸相对呈现将会对应于场景中的类似DR)。在明亮度的高端,明亮度应当在哪里结束,具体地,另外的明亮度仅在哪里变得恼人,这部分地是一个品味问题。我们发现,为了对若干种HDR场景分级,5000 nit仍然在某种程度上是在低端的,具体在必须应付像背光分辨率这样的另外显示限制时。在经验上,我们发现人们肯定能够在黑暗观看中到达10000 nit,而明亮度不会变得多余或令人不快(至少对某些观看者而言)。到20000 nit peak_white以上时,逼真地逐亮度呈现什么以及近似什么可能是实际的技术设计考虑,从而给出至少明亮度外观。注意,人们典型地不应总是以最大明亮度驱动这样的明亮显示器,而是为了做出最优的HDR体验,人们应当保守地仅在特定的场所和时间使用最明亮的呈现,并且还关于其时间演进而仔细挑选。人们应当不仅聚焦于画面内DR,还聚焦于在考虑人类视觉调节的情况下如何连续呈现不同明亮度环境。
另一动态范围是摄像机动态范围CDR,其仅由像素的光电二极管的全阱和黑暗侧的噪声确定(在给定曝光设置的情况下)。在使用像多次曝光或不同地可曝光像素阵列(例如,在3个芯片摄像机中)这样的技巧时,CDR变得受光学器件的限制(例如,透镜散射、透镜或摄像机本体上的反射等),但是这也能够通过尝试将来自黑暗场景区域的真实照明与由于杂散光引起的错误照射分离的合适计算成像技术而改进。当然,当图像的源是计算机图形例程(例如,如同在特殊效果或游戏应用中)时,人们能够远超出这些限制而容易地创建HDR。我们将忽略CDR,并且只是假定它非常高,或者也许是限制因素,但是在应该操纵非常高原型的情形的系统中。具体地,当我们介绍剪裁时,我们将假定它不是由于低质量摄像机捕获而引起的,而是由于整个成像链中的某些其他限制的实际操纵而引起的,如显示器不能呈现非常明亮的颜色。
现在脱离实际生成正确的光子分布来刺激观看者进入正确的感觉中(这也依赖于该观看者的调节状态)的显示环境RDR,在谈论操纵或编码HDR时,存在另一感兴趣的方面,其也能够被概括在动态范围中,我们应当称其为编码动态范围CODR。几个思想实验应当阐明这个重要概念。假如我们要用高吸收黑色标记在明亮的背部照明的白色面板上绘制,以至于我们将会得到面板的周围白色的1/16000th的透射(并且假定周围的房间和观看者优选地是吸收对象)。在例如摄像机捕获(其ADC)的线性比特世界中(对此我们的意思是我们线性地表示比如说0和2^B之间的值,其中^是幂运算,并且B是比特数),我们因此将需要14比特来表示这种信号。然而,由于这种编解码器对于不以任何方式出现的值将浪费许多代码,所以我们能够说为了忠实地表示该具体信号,我们理论上仅需要1比特编码。我们为黑色给出代码0,并且为白色给出代码1,并且然后将它们转换成它们所对应的任何实际亮度。此外注意,显示器实际上不需要用与场景中完全相同的亮度来呈现这些值。实际上,由于该信号可能看上去并不比其较低的DR等同物更好(心理上和语义上)(事实上这样的高对比度黑色和白色绘制可能甚至看上去古怪),我们也可能以值1 nit和2000 nit在显示器上呈现它。在这里我们首次看到一个感兴趣的区别,这在谈论HDR编码时是重要的:生理和心理(或语义)动态范围之间的差异。人类视觉由眼睛和大脑这两部分构成。眼睛可能需要合适的生理动态范围PDR作为前驱体来适当地刺激锥状体和/或杆状体(以及因此神经节细胞等),但最终是大脑确定图像或场景的最终样子(心理动态范围PSDR)。尽管并没有完全给出非常光亮的区域的确切印象,像Petrus Van Schendel这样的画家能够利用PSDR心理原理来仿真LDR介质高动态范围场景,像例如黑暗夜晚城市风光中的火焰一样。这也是在预处理HDR图像以便在LDR显示器上呈现时复杂的色域映射算法尝试做的。但是该原理的另一方面是,一些场景甚至在HDR显示器上比其他将看上去更像HDR(例如,阳光明媚的冬日风景,其中苍白干燥的灌木和一些树木在黑色中可能看上去高度明亮,但HDR并不如此)。对于HDR动作,像例如将明亮的照明器转向观看者一样,心理仿真通常并不像区域的真实明亮呈现那样有说服力。
现在沿着同样的路线考虑第二示例:我们具有亮度比如说在200 nit和5 nit之间的室内场景以及亮度比如说在1500和20000 nit之间的室外场景。这意味着我们再次具有以不存在的代码分离的两个亮度直方图。我们可以原生地将它们编码在比如说16个线性比特的范围上(最大代码例如对应于32768 nit),尽管将优选的是在没有过多捕获噪声的情况下使用某种非线性度以在黑色中具有足够的准确度。但是我们也可以按照不用的方式对其编码。例如,我们可以牺牲1比特精度,并将8比特非线性JPEG luma范围分成两个相邻接触部分,下面的部分针对上面的场景的较黑暗部分,并且上面的部分针对较明亮的部分(鉴于非线性JND分配,人们可能不想正好在中间切割)。如果人们在具有较少比特时关注精确细节的损失,则人们可以认为通常可能更好的是对于HDR效果取而代之地使用可用比特。这样的分配将典型地对应于输入RAW捕获的亮度(L)值向8比特luma (Y)值的移位和(非线性)拉伸。现在人们能够再次问自己以下问题:这样的场景的动态范围是什么,如果至少在用于呈现的后处理中它能够被“任意”压缩在一起或拉伸开(使得较明亮的外部甚至更亮,至少直到这变得例如不真实)的话。因此,不同外观的概念能够有帮助。我们可以在两个子直方图中具有针对不同像素或区域的多个不同亮度值,它们大概是大部分或全部相关的(如果不是,则我们就不需要对它们编码,并且能够例如丢弃一个或多个比特的精度)。此外,两个直方图的分离(例如作为平均亮度的差异而被测量的)在最终呈现在显示器上时具有某种外观意义。已知人类视觉在某种程度上使照明打折扣,但并不是完全地(尤其是存在两个明亮度区域的情况下),所以人们需要呈现/生成那些眼睛输入到至少一定程度。所以致力于有意义的不同颜色(或至少明亮度或光亮度),(例如在最佳可能显示情景下呈现的)可呈现场景中的像素或对象的外观为我们给出关于编码动态范围CODR的洞察,以及因此我们需要如何编码HDR图像。如果图像具有许多不同外观,则它是HDR,并且那些需要以某种方式存在于任何合理的忠实编码中。
由于经典图像或视频编码技术(例如,PAL、JPEG等)主要关注于大部分在原始相对固定的观看条件下(家庭环境中的CRT,并且不是链中的OLED,或同样的消费者在其阁楼中具有专用的黑暗电影院房间,其具有能够适应视频内容的飞行中动态可控灯光)在100:1的范围内呈现对象(反射)光亮度,所以那些系统以非常固定的方式对视频编码,具体地用固定的通用主编码伽马,其模仿眼睛的明亮度敏感度,如同例如V_709=1.099L^0.45-0.099,这近似是平方根函数。然而,这样的系统并不非常适于操纵巨大范围的CODR。近年来,已经尝试以对所有可能输入亮度进行场景相关线性编码的原生方式对HDR编码,如在OpenEXR系统中那样(F. Kainz 和 R. Bogart: http://www.openexr.com/ TechnicalIntroduction.pdf)。或者,存在基于经典可缩放性理念的2层系统。这些需要至少两个图像:典型地将是传统可使用LDR图像的基本图像,以及用于重构(多个)主HDR图像的图像。这样的示例是US2012/0314944,其需要LDR图像、对数提升或比率图像(通过将HDR亮度除以在针对LDR呈现系统合适地分级LDR图像之后所获得的LDR亮度而获得的)以及针对每个HDR待编码图像的颜色剪裁校正图像。利用提升图像,人们能够将所有区域(依赖于子采样)从它们的有限范围提升到它们在HDR范围上应当占据的任何亮度位置。注意,为了简单起见,我们在亮度的角度描述所有这样的操作,因为技术人员能够想象到在具体编码定义的luma角度应当如何公式化那些操作。这样的多图像至少在未来几年在某种程度上是繁琐的,因为它们需要已有装置中的严重升级的(解)编码IC,因为除了LDR图像之外还要求操纵另外的图像。
最近并且如WO2013/046095中描述的,我们开发了一种改进经典视频编码的方式(优选地用很少的修改,优选地用大部分地元数据针对两个非常不同的呈现条件应用与相同场景的两个分级有关的变换,例如,诸如允许在HDR分级中变换所编码的LDR分级或反之亦然,并且也许用一些变形,其有空间在元数据中存储一些额外的小画面以便在需要这样的另外修改的情况下进行最终调谐,例如在包含像例如电影的一个镜头或场景中非常明亮地照明的脸部这样的对象的小区域上的加法或乘法校正,其中针对每个像素的校正因子然后可以被编码在例如200个120x60像素图像中以便通过颜色变换映射到当前HDR重构的像素位置上,或者要作为粗略精细映射而应用的甚至那些小校正图像的某种子采样表示被描述为图像),以便能够编码高动态范围图像。在这种系统中,典型地人类分级者能够确定从输入HDR图像(主HDR分级)向例如能够通过经典视频压缩(DCT等)编码的8或10(或12,或原理上针对至少luma代码的另一值,但是该值典型地是针对“经典”LDR图像编码所保留的)比特LDR编码的最优映射函数,所述最优映射函数(例如具有最优伽马系数、线性部分等的伽马函数或类似物,或者像例如S曲线等这样的多段函数)典型地依赖于主HDR中的内容是什么(例如黑暗背景,具有非常明亮地发亮的区域)以及它在LDR条件下将如何呈现。我们将这称作通过将HDR分级映射到传统可使用的LDR图像对LDR和HDR分级的同时编码以及HDR的LDR容器编码。我们想要确保在这种技术中它是后向兼容的,因为如此生成的LDR图像在呈现于例如传统LDR系统上时给出合理结果(即画面看上去相当好,如果不是完美的话,典型地没有太多人将认为一些对象的颜色全都是错误的话)。如果人们在某种程度上接受精度的减小,则我们的系统甚至能够在传统8比特系统上编码HDR场景或效果。关于合理结果,我们的意思是LDR呈现的图像,尽管也许不是理论上能实现如艺术样子那样的最佳图像,但是对于内容创建者和/或观看者来说将是可接受的,这当然依赖于应用(例如,对于比较廉价的基于互联网的或移动服务来说,质量约束可以不那么关键)。当呈现在特性不十分偏离标准化LDR呈现的LDR系统上时,至少LDR分级将会在所成像的场景中给出大多数或全部对象(至少对于图像或视频的故事而言最重要的对象)的良好可见性。另一方面,对于HDR显示器,通过用从LDR图像到重构的HDR图像的联合编码映射函数的可逆反转进行映射,能够在逼近中近似原始主HDR。人们能够以例如所输入的原始主HDR与其重构之间的恰可察觉差异(JND)方面的数学容限来限定这样的近似。典型地,人们通过以下操作将设计出任何这样的系统:针对多个典型HDR场景、动作和另外情形测试所重构的HDR看上去有多么不同(如果这对于某些类别的用户,像例如电视或电影内容创建者,仍然是可接受的话),并使像具体伽马映射这样的类别的操作在其某些参数范围内有效。这保证总是能够实现某种质量的近似。
以下提出的技术的目的是在限定至少两个分级LDR和HDR方面为分级者给出甚至更大的通用性。
发明内容
以上目的通过具有一种图像编码器(202)而实现,所述图像编码器(202)包括:
- 用于高动态范围输入图像(M_HDR)的输入(240);
- 图像分级单元(201),其被布置成允许人类颜色分级者借助于人类确定的颜色映射算法来指定从根据预定义准确度所限定的高动态范围输入图像的表示(HDR_REP)向低动态范围图像(Im_LDR)的颜色映射,并且被布置成输出指定所述颜色映射(Fi(MP_DH))的数据;以及
- 自动分级单元(203),其被布置成通过对高动态范围输入图像(M_HDR)或低动态范围图像(Im_LDR)之一应用自动颜色映射算法来导出第二低动态范围图像(GT_IDR)。
人们将典型地从高动态范围图像(典型地主分级)或LDR分级做出GT_IDR分级,但是当然也可以有利的是对此考虑其他分级的图像特性,具体地各种对象的明亮度或光亮度样子(即,LDR分级应当看上去如同我们从M_HDR映射GT_IDR,使得GT_IDR可以是某种平衡,但是当然它也可以由所有种类的其他侧条件/因素形成)。我们假定主HDR图像以允许这样的编码的任何格式进行编码(例如,这可以是OpenEXR,或关于我们的图7所阐明的系统,通常例如分级软件的制造者所喜好的任何事物)。即,M_HDR编码可以是线性的、场景相关的类型,或已经被施加某种感兴趣的代码分配函数,但是为了我们的说明,我们可以安全地假定它是线性亮度编码。典型地,这样的主HDR图像将不会直接来自于摄像机(因为摄像机只是自动捕获工具,具有像颜色滤波器那样而不像人眼那样的特性,但是更重要地,其电路不像人类大脑那样,只是通过记录而从其中出来的内容可以良好但不一定最优),而是艺术最优分级(其例如使地下室背景环境变暗以创建针对该场景的最优意境),然而人类分级可以是某处摄像机的图像的简单函数映射(这然后是主HDR输入),例如只是获得某一呈现器上的第一视图,此后对高质量HDR图像编码(经由LDR图像和映射参数)。图像分级单元典型地是运行在计算机上的软件,这允许从像素的初始颜色到像素的最终颜色的颜色映射,例如将那些像素的亮度-相关从初始值改变到最终值,通过例如同时对该亮度-相关或例如颜色限定曲线(如R,G,B)应用色调映射函数(例如S-曲线)。技术人员应当理解,我们之所以使用术语亮度-相关来表示与像素的亮度相关的任何数学编码(当在场景中捕获或在其呈现中呈现时),是因为在给定颜色技术的复杂度的情况下,存在其若干类似变形,如luma值(V)、针对相关的函数限定,所谓光亮度,等等。实际上颜色的线性或非线性分量,如红色的量,也能够被用作亮度-相关。所以亮度-相关应当被理解为亮度轴(如CIE所限定的亮度)和另一轴之间的任何单调映射函数,使得在所述另一轴上的任何值都能够立即被转换成亮度值并且反之亦然。尽管各种相关的公式化在它们的精度细节上变化,但是原理保持相同。但是我们还引入术语来指示尽管我们的实施例的原理能够被限定在亮度映射上,但是它们实际上可以通过对其他亮度-相关进行数学计算或通常任何颜色编码而物理地构造。人类颜色分级者可以例如由电影的导演部分地引导以产生所捕获的电影的某种样子。
以上实施例的原理在于,不同于具有与LDR和HDR分级有关的固定映射函数的传统系统(例如,将任何输入图像编码成LDR编码,无论该输入图像是否具有增大的动态范围),我们现在具有双系统。这将典型地还创建两组映射参数(例如,亮度-相关映射函数,或通常限定用于将输入颜色变换成输出颜色的软件实现数学变换的数据)而不是仅一个可逆函数来创建要呈现的图像(在PCT/2012/054984的情况下,HDR重构将被用在HDR显示器上以直接地或在另外的颜色处理之后驱动它)。
在该双系统中,还存在可与主HDR相关的两个分级。首先,存在自动分级,其创建良好质量的第一LDR图像,我们称之为第二低动态范围图像GT_IDR。它可以(部分地)受颜色分级者影响(例如,通过从一组映射函数中选择出优选的一个,其通常对所有输入图像都得出良好结果),但是典型地有利的是,如果在装置中该自动分级出现在场景后面,在分级者的视野和关注之外,分级者然后能够聚焦于他的艺术期望。这种技术分级的点在于创建图像GT_IDR,尽管GT_IDR也许根据分级者的具体艺术期望不是完全最优的,但是在呈现于LDR系统上时产生良好可观看的LDR图像(良好可观看同样意思是不仅任何图像都将出来,而且观看者能够跟随电影中发生的内容的大多数,因为所有对象的可见性都是良好的,尽管由于与最优相比的一些变色而导致场景的意境可能在某种程度上改变)。但是它最大程度地限定其数学偏离,使得该第二LDR图像GT_IDR在技术上最优,因为容易从它以最优质量重构主HDR的重构REC_HDR。这意味着由于例如在使用从M_HDR到它的具体最优映射之后的量化而导致GT_IDR中的信息损耗应当是最小的,使得对于所有典型的可能HDR输入图像而言在所重构的HDR中存在最小可接受量。
那么在另一方面,存在人类分级者的艺术分级。他能够根据他的喜好来导出他想要的任何画面以针对LDR呈现系统来看。例如,我们可以具有在恐怖电影中的黑暗地下室发生的动作。HDR呈现系统可以能够非常暗地呈现黑暗环境,而同时仍然保持大多数对象的可见度(例如,靠墙的阴影中的架子上的拷问器具,或打开的门后面的无灯光相邻房间的内部)。并且同时,它可以能够呈现非常明亮的对象,如在该黑暗房间的天花板上摆动的单一灯泡,或走过该黑暗房间的人手中的火把)。然而LDR呈现系统可能具有较小的呈现黑暗环境的能力,具体因为它还需要针对像灯泡和在灯泡下行走的人的面部这样的较明亮对象在它有限的亮度范围内腾出空间,并且分级者可能想要通过用周围对象,即黑暗背景,的亮度提高对比度来仿真明亮度。分级者可以例如艺术地决定针对LDR分级Im_HDR而言使得这个背景全黑。应清楚,这种低动态范围图像Im_HDR然后不能用于以背景中的足够信息重构REC_HDR以使那里所有对象都可见。作为对此的概括,能够看作自动分级单元必须确保没有相关信息损耗发生,使得仍然能够从GT_IDR编码的LDR图像以良好的近似准确度导出HDR重构。注意,该LDR图像GT_IDR不需要本身以相同的环境约束来限定(例如,预期显示器的100nit peak_white),但是它也可以是例如针对200 nit基准显示器的。
如技术人员能够理解的,具有两种实现这样的系统的方式。或者技术分级自动分级单元首先进行它的映射,并且然后人类分级者致力于该GT_IDR以创建他喜好的LDR分级IM_LDR,或者人类分级者首先进行他的分级Im_LDR,并且然后自动分级单元从中导出技术上更合适的GT_IDR来以LDR_container格式编码所有相关HDR数据。所以实际上这在逻辑上对应于人类分级者将在两种情况下均致力于主HDR的表示。在人类分级第一情况下,它将是(无限准确的)主HDR本身,其形成起始点。在第二情况下,来自自动技术分级的所得GT_IDR将是主HDR的良好表示,因为它包含主HDR的大多数(至少相关)数据,使它在所映射的不同亮度-相关表示中(例如,主HDR中10000 nit的照明器的亮度可以表示为GT_IDR中的luma代码253)。根据预定义准确度,同样意味着人们将技术界限放在来自GT_IDR的重构REC_HDR可以偏离原始输入的M_HDR多少。典型地,技术人员知道人们能够(如果不是仅根据人类小组喜好而限定的)借助于例如REC_HDR与M_HDR的像素颜色的加权差异来在数学上表征这样的偏离。例如,人们可以使用遵循人类视觉原理来表征差异的数学函数,例如看区域中的颜色,并且例如如果它们出现在有纹理区块等则处罚差异。人们能够对于像例如照明器这样的一些语义对象允许较大的差异,因为针对这些对象的实际呈现亮度可以不那么重要。总而言之,技术人员将理解,典型地技术分级将进行一组预先商定的映射中的任何映射,其对于典型地出现的输入M_HDR图像中的任何或大多数将得出在某一阈值(其能够是人类评估小组的主观商定值,或商定的数学值)以下的重构误差。典型地,将存在例如一组伽马类函数(即,典型地起始于黑色中的线性部分,并然后弯曲以示出输出对输入的不断降低斜率),或者参数三段式曲线,以用于影响亮度或亮度-相关轴的黑暗/阴影、中间和明亮子范围,它们全都合理地表现,并且一些在具体类型的M_HDR的具体亮度区域中给出较小的重构误差。亮度分级者则可以选择这样的曲线。或者可替换地,自动分级单元可以通过例如看M_HDR的颜色或亮度直方图或对其进行更错综复杂的分析(例如,确定(多个)面部在哪里)来选择这样的最优曲线。所以根据预定义准确度对M_HDR的表示HDR_REP意味着该图像实质上包含M_HDR的所有数据,使其以不同编码方式,使得人们能够在预定义准确度内,即以最差情况典型地不超过商定等级的重构误差,反转地重新获得输入的M_HDR。
所以人类分级者因此致力于M_HDR,或致力于GT_IDR,以获得其喜好的低动态范围图像Im_LDR以便用于LDR呈现系统。他可以在分级软件中使用他从一组可用映射中决定的任何颜色映射,例如他可以定制特定全局色调映射(即亮度映射)或颜色映射函数,以单独基于像素的输入颜色值而应用到图像中任何空间位置处的所有像素。或者他可以使用局部微调的映射。例如,他可以在图像的具体几何区域(例如,在矩形或以别的方式限定的边界形状内指定的)中仅选择那些比具体luma值更明亮(或在指定的颜色范围内)的像素,并根据局部颜色映射策略等仅变换这些像素。然后他将写入他所做的所有事情作为元数据,例如能够以参数形式写入全局亮度-相关改变函数(例如,针对S类曲线的三个区域的幂函数系数,像阴影的结束点,每侧的线性部分,抛物线曲率系数等)。如果这些函数(极大地)可逆,则接收侧能够使用这些以通过使用该输出图像作为输入图像并使用逆颜色映射策略来重构回原始图像,其中该输出图像至少在某一准确度内从该原始图像获得(在例如已经引入量化和/或DCT伪像等之后)。
在人类分级第一实施例中,人类分级者将从M_HDR映射产生映射参数Fi(MP_DH)。然而由于自动分级仍将修改LDR分级,所以这些最后都不是感兴趣的参数。自动分级单元将从中导出两组新的参数。它将导出从HDR向作为GT_IDR的新LDR分级的不同映射,其中映射参数为Fi(MP_T)。它还将导出新映射参数Fi(MP_DL)以从技术分级的第二LDR图像GT_IDR创建人类喜好的LDR分级Im_LDR。当存储接收侧致力于所编码的M_HDR图像所需的数据,即具体地允许接收机重新创建重构REC_HDR时,格式化器将典型地将GT_IDR(针对对象的纹理)以及两组映射数据Fi(MP_T) 和Fi(MP_DL)编码成在任何信号标准的指定中,即典型地在图像(或视频)信号TSIG的元数据中,限定的合适编码。在首先自动分级的情况下,人类分级者将致力于GT_IDR以产生映射参数Fi(MP_DL),并且然后这些将被写入信号中(除了GT_IDR图像和Fi(MP_T)以外)。
依赖于系统是哪种变形,自动分级单元然后将应用直接来自于主HDR M_HDR的第二LDR图像GT_IDR作为预先指定,或作为后校正,其中基于先前人类分级的Im_LDR作为输入。对于颜色映射的许多可能变形中的任何变形,技术人员应当清楚术语指定颜色映射的数据。典型地分级软件可以存储它使用的函数的参数,并且具体地它可以使用被预先调控为利于编码的映射函数。例如,我们能够设计多个局部或全局函数,其在保守地使用时,即以一个范围内的值使用时,是可逆的(在指定的准确度内),并且在被分级者激进地使用时可以成为(部分地)不可逆的。这样的示例可以是伽马函数。高达值3.0的伽马系数可以被看作对于具体系统而言是可逆的(即从具体初始动态范围,例如CODR或例如在5000 nit限定的基准范围的若干子范围中有特别重要的数据,向具体LDR基准情形,例如传统LDR系统限定,例如sRGB的观看环境),但是3.0以上的伽马可以被看作对于至少输入亮度范围的子范围(即,对于可逆的重构)来说是严重的。或者在扩展集合中,为了从自动GT_IDR产生后验LDR分级,可以具有不存在于自动分级中的函数,并且在以输入HDR信息创建期望的分级LDR图像之后在输入HDR信息上创建显著的信息损失。系统可以典型地工作在其中分级者具有有限自由度来创建LDR图像但是具有良好技术性质(即,接近良好运转的GT_IDR)的模式或阶段,以及其中分级者具有(接近)无限制自由度或在确定他的最优LDR分级图像Im_LDR时有至少较高自由度的模式或阶段。
在有利实施例中,自动分级单元(203)被布置成通过满足以下条件来确定其自动颜色映射算法:通过对第二低动态范围图像(GT_IDR)应用第二颜色映射算法(CMAP_2),能够从高动态范围输入图像(M_HDR)计算落入第二预定义准确度内的HDR重构图像(REC_HDR)。
所以自动分级单元将维持第二LDR图像GT_IDR的质量以使得能够良好重构主HDR。它将通过约束能够用来使M_HDR与GT_IDR有关的函数来满足该条件。具体地,如同例如颜色分量像例如(R,G,B)或(Y,Cr,Cb)一样的颜色分量的量化这样的动作不应损失过多的(显著的)数据。所以它将典型地基于这样的评估来选择其映射函数,无论这是先验计算(例如提供在实验室预先测试的算法,使得当它作用于具有例如某些亮度直方图分布性质的HDR图像时,它将得出对于某些映射函数或算法而言良好的重构性)还是用后计算,例如在迭代循环中选择多个可能映射函数中的最佳者。第二预定准确度是通过以下操作可实现的最终准确度:从以所挑选的映射算法编码的数据重构REC_HDR,即对 GT_IDR应用Fi(MP_T)的逆,这将我们所谓的第二颜色映射算法CMAP_2反转。对于自动分级第一实施例,这将意味着自动分级单元将仅确定M_HDR与GT_IDR之间的映射(并且用户实际不需要受到该关系的打扰)。然后它将选择例如适当的伽马函数,使得GT_IDR仍然具有对M_HDR中的阴暗样子的合理逼近,而在GT_IDR的一个luma中没有相关亮度值过多地群集在一起。在人类首先分级的情形下,自动分级单元仍然必须确定M_HDR与GT_IDR之间的最终映射Fi(MP_T)。这对应于在人类分级者之后重新确定新的第二LDR分级图像GT_IDR(但是这将不会破坏人类分级,因为用于从GT_IDR重构它的映射参数同样被确定)。对此能够存在若干策略。例如,自动分级单元能够看映射函数,并在例如由于量化而引起严重数据损失的区域中在某种程度上使它偏离。对此,自动分级单元可以研究所获得的图像(与M_HDR相比,Im_LDR vs. GT_IDR),还有映射曲线本身(通过查看它与一般地良好实施的映射曲线偏离多少)。另一种可能是,自动分级单元选择一组映射函数中与人类分级器选择的最接近的也是良好实施的映射函数。从其上是数学计算来获得最终系统。例如,将通过对人类分级者M_HDR至Im_LDR映射函数Fi(MP_DH)应用偏离函数来获得GT_IDR。实际上,自动分级单元然后能够直接向M_HDR应用该最终函数以直接以最小误差获得GT_IDR。能够通过使用偏离函数来从中导出Im_LDR。技术人员理解在其他数学框架中自动分级单元能够如何类似地确定最优映射Fi(MP_T)和与之对应的从GT_IDR到分级者的Im_LDR的映射(即Fi(MP_DL))。我们在图6中已经示意性地将这示出为向人类分级者的分级应用技术失真DEF_TECH,以获得技术分级的LDR图像GT_IDR。即,自动分级单元能够从LDR图像Im_LDR开始工作,并工作在失真理念下,并且从中导出Fi(MP_T),或者在给定其技术分级的技术限制的情况下,它能够直接看人类分级Im_LDR的样子并从M_HDR开始做出其近似,从而引起Fi(MP_T),并从中确定Fi(MP_DL)以从GT_IDR导出人类分级(该映射可以然后是技术上非常自由的),等等。所以技术人员应当清楚能够并且将会以哪种方式来满足条件。同样,准确度能够被预定义为任何度量,例如对于技术学的质量类别(例如,针对高级用户的高质量电影vs.最大程度给出印象但不是最终质量的低质量HDR编码),例如指定某些映射在困难情况HDR图像上将创建不比预先商定的量的伪像大的伪像。不根据指定表现的其他映射策略则不应使用。在任何情况下,除了在限定中精密准确的细节,任何侵权者应当清楚他是否在使用如上所述的双分级技术链系统。
如上面已经介绍的,如果至少自动分级单元(203)以及可能地还有图像分级单元(201)被布置成至少在与高动态范围输入图像(M_HDR)的相同几何区域相对应的相应输入图像的几何区域中,至少对它们的相应输入图像的像素的亮度-相关应用单调映射函数,则可以是有利的。在图像的唯一可识别区域中(例如整个图像)具有这种一对一函数限定意味着,至少在无限精度轴上人们能够容易地将这些函数反转。如果这些函数的导数或斜率使得它们不将许多M_HDR亮度合并到Im_LDR或至少GT_IDR的单一代码中,则是尤其有利的。此外,这样的单调函数易于在技术上计算,例如用查找表。例如,这可以采用诸如luma Y这样的亮度-相关作为输入和输出。能够以两个空间区域进行的经常出现的HDR场景的示例是例如从汽车或房间等的内部拍摄的内部-外部图像。关于对应的几何区域,我们的意思是如果该区域限定在比如说Im_LDR上,则像素是以M_HDR中的像素可识别的。例如,如果图像具有相同几何结构(分辨率和切割),则像素位置可以并置,但是在像例如缩放这样的几何变换的情况下,它还应当清楚这对技术人员来说意味着什么。
尽管简单系统可以例如使用固定的预先商定的总是正确地运转的映射函数Fi(MP_T),然而有利的是如果更先进的系统能够最优地自己确定映射,具体地如果自动分级单元(203)被布置成根据质量准则来确定其自动颜色映射算法,所述质量准则估计高动态范围输入图像(M_HDR)中的像素的亮度-相关中的信息量与第二低动态范围图像(GT_IDR)中的像素的亮度-相关中的信息量的差异。
技术人员将理解,存在不同的方式来限定信息量,但是它们全都牵涉到测量有多少数据存在于表示中(尤其是有意义的数据)。可以存在语义-盲目方法,其仅测量可用颜色,而不测量它们来自哪个区域或对象。例如人们可以测量M_HDR的亮度中有多少映射到GT_IDR的单一luma。如果例如大多数亮度仅二对二映射,但是在M_HDR亮度轴的某一区域中HDR的亮度的5个数字值(或在浮点表示中,亮度的跨度超过某一尺寸)映射到单一GT_IDRluma,则这可以被看作过大信息损失。所以在M_HDR中数字化亮度的跨度大小或量是可能的信息量度量的示例。当然可以使这些度量更智能,通过例如看它们在M_HDR亮度范围的具体感兴趣子范围或甚至像例如面部这样的语义对象上如何表现。能够规定,例如每个面部应当在GT_IDR中由至少50个luma代码来表示,或M_HDR中具有N个数字亮度的面部的每个区域(或与之等同的连续跨度)在GT_IDR中不应由少于该量N的一半的luma量M来表示。在给定非线性映射函数的情况下,这能够针对人类而基于非线性意义性来微调。例如,人们能够指定某一编码GT_IDR在基准HDR观看环境下重构成REC_HDR时将会与多少恰可察觉差异(JND)相对应。并且然后人们能够指定面部应当是以至少R个可区分JND可重构的。或者面部中像皱纹这样的结构应当通过最大S(比如说3)个JND的可重构步骤而从皱纹内部的较黑暗值改变成皱纹外部的较明亮值。我们还介绍恰可关心差异JCD,其能够用于一些语义对象。例如,在照明器中,可以足够的是,照明器是亮的并且内部结构的一些东西(如灯泡形状)仍然是可辨认的,但是无论是照明器的还是灯泡的确切值还是那里的相对亮度都可以不是关键的。在这种情况下,这两个区域可以被编码为非常精确,如果在例如1 JCD内的话,其可以是例如20 JND,或者被指定为亮度的差异或分数(对于落入要用于呈现灯的明亮亮度的所限定子范围内的亮度)。所以可以仅基于以下来确定信息准则:两个图像中的颜色数据的一维或三维面元(binning)(形状和/或尺寸),像亮度或颜色直方图这样的统计准则,以及具体地关于哪些区域可以更严重地失真的语义信息(例如,人类分级者能够快速将涂鸦绘制在必须以高精度编码的图像区域上,如可以在捕获期间被特殊照亮的动作的主要区域,或人脸),像例如对象区域中的结构的边沿或形状以及它们在某些类别的映射下如何失真(例如,清楚可见或对比强烈)这样的几何信息,或纹理特性(例如,在复杂纹理中,可允许较大量的伪像),或像具体对象的自动检测这样的语义信息,或其人类表征(通过至少粗略地标记区域和ac类别,如“比较不关键的照明器”),等等。所以技术人员能够理解,能够存在多种方式来预定义数学函数的系统,所述数学函数指定何时已经丢失过多数据,例如从而减少对象等上的较少纹理变化照明的量。可以存在一个单一准则或一组准则,其导致对图像GT_IDR的全面分析,并且将其某一区域标记为必须重做。关于该信息,图像分级单元能够确定映射是否满足技术要求,或者能够例如通过略微调整旧的那个来确定新的映射。例如,在GT_IDR的一个区域仍然过于粗略地重构M_HDR的一个区域(例如对象)的情况下,图像分级单元能够完全重新确定例如全局映射(典型地,当然它可以仅微调针对出现问题的那些M_HDR亮度区域的映射,例如,它可以针对有问题的亮度子范围增大Fi(MP_T) 向下映射函数的导数,其典型地对应于向外移位——相应地移向其他像素颜色的更黑暗或(resp.)更明亮的值——并针对它们通过柔和弯曲映射函数的那些部分来调整到新的可用范围)。或者图像分级单元能够导出要时间连续地应用的额外局部分级,例如该区域的预先提升,以及联合编码的部分(校正)图像中的节省等等。典型地,有利的是,当图像分级单元甚至在它以预先确认的合适颜色映射策略创建GT_IDR时也后确定GT_IDR图像何时确实满足REC_HDR为具有足够质量的近似这一条件。
有利地,自动分级单元(203)被布置成根据准则来确定从高动态范围输入图像(M_HDR)的像素的亮度-相关向第二低动态范围图像(GT_IDR)的像素的亮度-相关的单调映射函数(Fi(MP_T)),所述准则确定分配给第二低动态范围图像(GT_IDR)的像素的亮度-相关的相应单一值的高动态范围输入图像(M_HDR)的像素的亮度-相关的相应范围,所述相应范围形成一组亮度-相关范围,该组亮度-相关范围覆盖针对高动态范围输入图像(M_HDR)的可能亮度-相关值的总范围。这是一种确定例如由于过度量化而导致的信息损失的简单方式。例如,可以限定沿着所有可能值的M_HDR亮度轴在单一值对M_HDR输入亮度上映射的预定义尺寸的范围,这允许指定较明亮的对象可以更粗略地量化。这可以是,它们已经相较于原始捕获场景以明显的误差进行近似(例如,人们不需要准确地以100,000 nit在HDR显示器上呈现车灯),所以人们可能接受REC_HDR中的额外误差。该准则然后能够容易地转换成例如确定映射函数的形状,因为它在任何地方都不应该如此强烈地弯曲以至于将大于允许的范围映射到单一量化值,从而给出GT_IDR编码器的已知设置(例如MPEG2量化值)。
以上描述一种编码器的内部工作,所述编码器能够用在各种装置中,像例如图像计算单元中的中介系统一样,但是有利的是,如果所获得的编码数据被发送在外部,例如作为能够由接收机使用的信号,即图像编码器(202)包括数据格式化器(220),其被布置成向图像信号(TSIG)中输出第二低动态范围图像(GT_IDR)和以下之中的至少一个或两者:描述高动态范围输入图像(M_HDR)和第二低动态范围图像(GT_IDR)之间的颜色映射(Fi(MP_T))的数据,以及描述低动态范围图像(Im_LDR)和第二低动态范围图像(GT_IDR)之间的颜色映射(Fi(MP_DL))的数据。原理上并非所有接收机将需要这两组参数,但是有利的是,如果接收机得到这两者,并且然后能够例如最优地确定如何使用所有可用信息来达到针对具体显示器和观看环境的最终驱动信号(例如,它可以混合编码的HDR和LDR分级的信息,以得到新的分级,我们称之为显示可调谐性)。注意,尽管我们仅以两个分级描述了我们的基本系统,但是在相同系统中可以存在另外的分级,例如针对超明亮HDR显示器的第二HDR分级、或第三LDR分级、或针对(LDR或(resp.)HDR级别的比如说100 nit和5000 nit基准之间的中介peak_white的)MDR显示器的分级、或针对sub_LDR显示器的分级,并且这些可以构造为独立设计的附加物,而且根据所提出的发明理念,例如人们能够导出第二技术分级GT_IDR2,其是来自M_HDR的HDR技术导出分级并且服务于限定ultraHDR分级。例如, GT_IDR2能够通过对最明亮光区域的简单数学拉伸而导出,但是分级者能够通过以下操作来对其进行校正:限定另外的映射数据Fi(MP_DHH),例如以通过从GT_IDR2映射进行校正。
图像编码器对应于一种图像解码器(401),所述图像解码器(401)被布置成经由图像信号输入(405)来接收图像信号,所述图像信号包括第二低动态范围图像(GT_IDR)、以及描述使得能够基于第二低动态范围图像(GT_IDR)来重构高动态范围图像(M_HDR)的重构(REC_HDR)的第一颜色映射(Fi(MP_T))的数据、以及描述允许基于第二低动态范围图像(GT_IDR)来计算低动态范围图像(Im_LDR)的第二颜色映射(Fi(MP_DL))的数据,所述图像解码器包括图像导出单元(403),其被布置成基于描述第二颜色映射(Fi(MP_DL))的数据和第二低动态范围图像(GT_IDR)中所编码的像素颜色来导出至少低动态范围图像(Im_LDR)。人们将从该解码器看出,它能够访问映射参数以向上将LDR图像颜色映射到REC_HDR并且“向下”获得内容创建者期望的LDR分级Im_LDR。图像导出单元将具有实施所要求的(例如预先商定的)解码颜色映射的功能性(例如,IC的加载软件或硬件部分)。人们还能够看出,技术级别GT_IDR是一种技术级别,因为它由于对象的亮度不沿着亮度轴处于最优地方而将具有较少的意境(甚至不用与最优Im_LDR相比较),将典型地具有较低的对比度、在某种程度上更明亮的黑暗等等、以及当然针对图像中的各种对象区域的有限代码量。
有利地,图像解码器(401)包括系统配置单元(402),其被布置成确定所述解码器是否连接到高动态范围显示器(411)和低动态范围显示器(416)中的至少一个和/或应该针对高动态范围显示器(411)和低动态范围显示器(416)中的至少一个导出图像,并且所述系统配置单元(402)被布置成在连接到高动态范围显示器(411)的情况下将所述图像导出单元(403)配置成确定至少所述重构(REC_HDR),并且被布置成在连接到低动态范围显示器(416)的情况下将所述图像导出单元(403)配置成确定至少低动态范围图像(Im_LDR)。我们的系统(即,编码信号和各种类型的解码器)必须能够与简单的解码器一起工作,所述简单的解码器例如接收如我们以上的GT_IDR中的LDR_container那样编码的HDR,但从此需要的仅仅是针对LDR显示器的LDR。它们然后将忽略信息的大部分,并且仅提取GT_IDR和FI(MP_DL),并从中计算Im_LDR。更精密的解码器将例如在飞行中确定它们例如无线地连接的显示器,并最优地向各种所连接的显示器供应所有接收到的编码信息的各种组合(例如,向阁楼影院房间中的父母以及向床上观看他的LDR便携设备的小孩提供相同的电影)。
所以有利地,根据以上任一项权利要求所述的图像解码器(401)具有:与任何可连接的显示器的有线连接(410)或无线连接(415)作为输出;以及信号格式化器(407),其被布置成向任何所连接的显示器传输所述重构(REC_HDR)和所述低动态范围图像(Im_LDR)中的至少一个或两者。
此外有利地,所述图像导出单元(403)被布置成基于所述重构(REC_HDR)和低动态范围图像(Im_LDR),或所述第二低动态范围图像(GT_IDR)以及描述第一颜色映射(Fi(MP_T))的数据和描述第二颜色映射(Fi(MP_DL))的数据,确定另外的图像。这允许针对各种所连接的显示器(显示可调谐性,例如经由显示器的测量得到周围照明的值等等,以及以此来优化显示器驱动信号)确定最优的最终级别(例如,直接驱动信号)。
图像编码器可以被包括在各种装置中,例如其图像信号输入(405)可以被连接到读取单元(409),所述读取单元(409)被布置成例如从诸如蓝光光盘这样的存储器对象(102)读取图像信号。
在各种使用或应用中,以上装置的所有实施例都可以另外实现为等同的方法、信号、信号存储产品等。
附图说明
根据本发明的方法和装置的这些和其它方面将从随后描述的实现方案和实施例以及参照附图显而易见,并且将参照这些实现方案和实施例以及参照附图进行阐述,附图仅用作例证说明更一般概念的非限制性具体说明,并且其中虚线用于指示组件是可选的,非虚线组件未必是必要的。虚线还可以用于指示被解释为必要的元件被隐藏在对象的内部,或者针对非有形物品,例如,诸如对象/区域的选择(以及它们可以如何被示出在显示器上)。
在附图中:
图1示意性地图示了传统图像或视频编码系统,如关于具有可调谐拐点的摄像机而例证说明的;
图2示意性地图示了我们的图像编码系统的第一种可能实现,其中自动分级单元基于先前人类LDR分级导出自动分级的第二LDR图像GT_IDR;
图3示意性地图示了我们的图像编码系统的第二种可能实现,其中来自自动分级单元的自动分级的第二LDR图像GT_IDR用作由人类分级者通过另外分级限定最终LDR分级Im_LDR的基础;
图4示意性地图示了图像解码系统的可能变形,其中高端解码装置读取根据我们的编码实施例中的任何一个编码的数据,并从中导出适当的信号以用于所连接的各种不同显示器;
图5示意性地图示了并入摄像机中的根据我们的发明原理的编码器实施例;
图6示意性地图示了我们的编码的变形背后的原理,其被示为分级之间的颜色映射关系的逻辑图;
图7示意性地图示了一种限定我们的起始输入(其是主HDR分级M_HDR)的方式,并且示出了来自摄像机或计算机图形系统的数据能够如何被写入这样的数学颜色规范,具体地沿着其亮度-相关的范围;
图8示意性地图示了颜色映射策略(即其亮度映射部分)的示例;
图9示意性地图示了如何确定任何映射函数或算法对于REC_HDR的重构是否具有合适的准确度的示例;
图10示意性地图示了如何将不合适的函数变换成合适的函数的示例;
图11示意性地图示了如何在3D颜色空间中操纵颜色映射的一些示例;
图12b示意性地图示了分级者能够如何与代码分配曲线交互以细化它,并且在图12a中示意性地示出了能够如何通过与当前观看的图像中的对象(联合)交互来选择代码分配曲线的区域;
图13示意性地图示了人们能够如何通过实现良好质量内容自适应对比度拉伸的非常简单的参数变换而从在该示例中已经会对LDR呈现有用的技术分级到达看上去更好的LDR分级;
图14给出了人们能够如何操纵技术分级中的另外比色限制的示例,其能够在被接收后在生成最优图像以用于呈现在具体显示器上时使用;
图15示意性地图示了针对饱和度处理的有用新策略,对于向具有不同亮度结构的颜色表示的分级而言该新策略是特别感兴趣的,例如,诸如由于不同亮度动态范围的显示器上的预期呈现;
图16示意性地图示了针对这种新颖的饱和度处理的创建和使用部分装置;以及
图17示意性地图示了在需要针对更高和更低动态范围呈现情形的分级时的仅两种可能使用。
具体实施方式
图1简短地概括了我们称作LDR编码的所有经典图像和视频编码背后的构思。假如我们已经具有比如说用图像传感器104(例如CMOS传感器)捕获光的专业电视摄像机(尽管类似的考虑适用于消费者静止摄像机)。这样的光将会在ADC之后处于与亮度相关的线性空间中(原理上,在忽略噪声、ADC非线性度等时是亮度乘以缩放因子),并且将会是例如R, G,B所谓的原始信号(或对于其他传感器而言的青色、洋红色、黄色、绿色或类似物,但是这些然后将会被矩阵化为RGB,所以我们能够聚焦于此)。这种LDR捕获的原理是信号在家庭电视(其曾经是近似100 nit peak_white或某种程度上更黑暗或更明亮的CRT)上应当看上去良好。在摄影棚中,导演、摄像机操作者或类似的人将直接在基准CRT上观看摄像机的输出,以检查捕获的节目是否的确看上去良好。这样的LDR节目的捕获(实际上,如主要通过选择孔径设置所确定的自动曝光)由针对中间灰色具有适当呈现的明亮度的原理来确定。由于这种中间灰色经由人类视觉的非线性度直接链接场景中类似地照明的部分中的白色(并且假定(接近)-线性再现,直到缩放因子,典型地也在CRT上),即它对应于反射下落光的近似18%的对象。灯光设计者将他的舞台灯光设置为使得围绕动作的灯光相对均匀(例如,3:1对比率),并且可能还点亮场景的一些角落以避免最终呈现中的“黑洞”。现在具有显示器110,所述显示器110具有最大可实现的peak_white(这对于例如具有一些固定TL背光的LCD尤为如此,但是对于可以经由对比度设置来控制波束强度的CRT也是如此,对于任何设置仍然存在最大可实现的明亮度),这不意味着这确切地必须对应于比如说场景的最佳效果点(sweetspot)处高度反射纸的白色。由于总是存在亮度的变化,尤其是对于视频中的移动动作,这将是不切实际的,并且当人们将纸移到某种程度上更高亮度的区中时,可能快速地出现不期望的剪裁。所以人们在明亮侧需要一点点安全措施,尽管对于典型的LDR场景和节目而言,这不需要非常多。在黑暗侧,人们简单地令信号消失于摄像机的噪声中。所以在明亮侧人们将在peak_white PW以下的位置W处呈现白色。优选地并不太多,以至于它仍然看上去是白色的并且不是浅灰色(对于包含对象的自然画面而言,对此存在某种宽容度)。此外,中间灰色MG以及落在其周围的人脸的颜色然后将合理地可见,因为它们将在呈现中相当明亮。所以,任何捕获或分级的最小要求是,我们能够很好地在演员的面部(以及眼睛,由于它们在眼窝中的突出位置而可能在某种程度上是影影绰绰的)看到他们的表演,并且更特别地,所有那些漂亮演员的面部颜色将看上去是吸引人的(并且不过于模糊或苍白)。其余(例如更黑暗的)颜色则自动沿着曲线变得合理。人们过去典型地因为CRT的行为(由面部平板照明等调制的电子枪非线性度)而使用大约是平方根的曲线,并且仍然使用这种非常有用的曲线,因为它碰巧对人类视觉的明亮度特征化进行建模(即,luma值近似是明亮度,前者是例如在Rec. 709空间中的数学编码值,并且后者是人类的神经视觉外观)。现在电视能够对该曲线做一些简单变换,例如它能够通过乘法因子来提升所有值。这样的操作,例如对观看环境中的改变进行计数,对于像图像对比度及其对象的对比度这样的神经视觉图像外观特性有影响。摄像机能够进行类似操作。现在问题是最优地将像MG这样的亮度置于哪里以及如何容易地这么做。在简单系统中,摄像机中的编码器101能够在原始信号的Max_Luminance与其下方的任何之间变换所有值,其中通过用从该Max_Luminance限定的平方根函数来弯折它们进行变换。然后来自场景的所有可能的摄像机捕获值将被编码在如此生成的图像Im_LDR中(这里被示出在像蓝光光盘这样的包括编码图像的介质102上,但是它也可以是线缆或频道上的信号)(典型地,人们将值量化为例如8比特,并且可以实施像图像编码操作这样的其他操作,比如用离散余弦变换DCT分解的近似)。通过将编码的luma值求平方,解码器103能够利用显示器取回如再次捕获的场景的原始亮度,以作为显示器呈现的亮度。现在,在这种严格控制的系统中,存在一定自由度来适应典型LDR场景中的最小变化。通过盲目使用这种平方根分配,(如果人们通过确定高度点亮的对象的曝光以使它们仍然被良好地捕获来确定场景上这些对象的最大值)可能发生的情况是中间灰色和面部颜色在这样的曲线上变得过暗。如果存在应当被相当好地捕获的许多明亮对象,则人们将喜爱代码限定曲线,其从最明亮的RAW代码开始在某种程度上更缓慢地下降。这可以通过为摄像者供应可控制的拐点来完成。他可以例如用拐弯选择与他的动作最佳效果点白色相对应的输入亮度等级,并将其置于例如90%的最大luma代码上(对应于显示器上的peak_white)。然后他具有余下的10%代码以用于编码这以上的所有值,并且他能够调整曲线的拐弯以上的部分的斜率,以并入例如高达最大600%的最佳效果点白色亮度的亮度。按照这种方式,他能够对应于将LDR场景点亮得更朴素或更具对比性来调谐他的曲线。如果是低对比度场景,则他能够将他的拐点放在最大luma附近,并且在最佳效果点白色以上很难编码任何亮度,以及如果他期望在例如他们谈论光泽金属银器的脱口秀中具有许多高亮度信息,则他可以在编码的luma信号中并入一些明亮光泽高光。这种简单系统如此自动地适应于显示器侧的具体LDR场景的最佳分级,即其通过使较暗的颜色在某种程度上变暗而使得具有很少的额外空间进行银器高光,并且将某种可见结构推入更亮的对象中(主要相比于针对这些明亮对象的原始场景亮度而失真,并且由于RGB系统的色域形状而通常具有柔和颜色,尽管如此,但是在一定程度上存在)。然而这样的LDR系统针对更高的明亮度快速地剪裁,并且不适合编码例如通过摄影棚窗户可见的外部世界,该世界并不被关心。有时,在现场工作的摄像者决定在其相对暗的起居室末端拍摄人物时,这引起奇怪的情形。然后,当对面部良好地曝光时,所捕获的图像中示出房间较亮部分的一半将会被剪裁为白色。LDR屏幕上可能仍然有一点讨厌的是,白色只是作为某种“白颜色的对象”而不是真实发亮的区域被示出,这在画面的一半特别明亮地发光的5000 nit显示器上引起非常诡异的情形。
因此,LDR系统、其理念还有其技术结构所固有的能力并不适于HDR捕获,其中人们想要同时捕获场景的第一照明部分以及场景的第二明显更明亮地(例如100倍)照明的部分,并且可能同时甚至非常黑暗的部分等等。
利用图2,我们现在阐明我们的发明的变形背后的一些原理,即并入分级系统的图像编码器202的具体实施例。所示出的是作为分级系统的一部分的我们的自动分级单元203。这样的系统可以例如是计算机运行的分级软件,但是它也可以是不那么复杂的系统,其中人类例如仅会有时从远程位置修改颜色映射的一些设置。人类分级者能够经由用户接口系统230指定他期望的颜色映射,所述用户接口系统230可以例如包括具有轨迹球等的专用分级控制台。与软件耦合,他能够如此提高例如所选择的图像区域的颜色饱和度,或在色调映射曲线上向上拖拽所标记的点(例如对于所有像素,红色component_in对所得红色component_out)。我们将把我们的描述聚焦于典型地已最优地预先分级的主HDR图像(例如,经由可连接到例如数据服务器或网络连接等的输入240接收到的)上发生了什么,尽管这也可能直接来自于摄像机,摄像机可以例如在内部完成某种分级。利用图7,我们描述人们能够如何限定这样的主HDR分级或图像的示范性系统。任何摄像机捕获或分级实际上仅仅是世界场景的表示,其需要刺激人类得到该世界场景的合理印象,因此其不必是完全准确的表示。实际上,人们总是需要跨越从场景相关(其中摄像机仅起到线性测量设备的作用)到显示相关(其中显示器需要以非常不同的设置向人类仿真原始场景)的困难边界(尽管这种复杂度中的一些不需要在主编码中操纵,而是能够推迟到显示变换)。人们能够讨论主编码是否应当能够准确地编码例如太阳,其中显示器将永远不会准确地呈现太阳(其甚至在可能且明智的电力消耗方式时在较小屏幕上对于观看者来说将是非常令人不快的)。所以为什么不将它分配给例如固定的高亮度代码(例如,20000 nit而非10亿 nit的伪太阳)。另外,关于能够对不易于使得可见的所有种类值编码的场景相关系统的问题是,不容易致力于这些颜色空间。例如,如果分级者要调整在他的当前分级显示器上感知不到的一些饱和花朵的饱和度,则在能够示出这些颜色的更好显示器上示出该图像的任何时候,他可能做出难看的颜色。也许这是稍后可修复的操作,但是人们会问为什么不首先做这个,至少对那些颜色。在图7的HDR编码实施例中,我们对大范围的亮度给出许多值,其能够在例如peak_white 10000 nit(对应于全HDR表示HDR_FREP中的亮度值MAX_REF)的高质量HDR基准显示器的亮度范围上相当准确地编码(/分级)。构思是人们可以至少使最感兴趣的颜色表征在这样的高动态范围规范中,并且分级者能够实际看到它们,并且最优地彼此比较地定位各种场景对象的亮度(例如,使云变暗)。这种例如可显示颜色的0.01 nit(我们可以将其简称为0)到10000 nit的范围将是我们的主级别M_HDR*,因为我们能够最优地对它分级。构思是较小动态范围的任何显示器能够从M_HDR*内的颜色的规范开始导出其要呈现的颜色(典型地,我们将从全HDR图像表示HDR_FREP提取该范围以作为针对例如图2的我们的系统的输入M_HDR)。该规范或许也将会对于具有更高动态范围的显示器相当好地工作。例如,分级者可以将场景的一些明亮的灯近似地分级,以至于它们将在任何显示器呈现上至少显得明亮。他可以在针对HDR基准显示器的基准级别M_HDR*中将最明亮的灯编码在比如说MAX_REF的99%(线性)处,并且他可以将另一明亮的灯编码成仍然明亮但是对比来说肯定不那么明亮,比如说在MAX_REF的80%处。实际的20000 nit显示器可以对那些灯的代码使用简单缩放,例如用因子2提升两者,其仅对应于将它们类似地(以百分比)参考到其更高的peak_white。在这种情况下,两个灯可以在某种程度上更亮——如同它们在原始场景中可能的那样——但是该HDR呈现的样子仍然极大地类似于分级者的10000 nit基准监视器上的基准样子。实际上如果人们想要更准确地编码比M_HDR*中能够近似编码的值更高的值(例如,适当地使灯变暗,以至于它落在范围内,仍具有类似样子,即该灯的确切场景亮度是无关的),那么他可以在图7的颜色空间定义中这么做,而无论他是否希望稍后将这些值用于更高动态范围显示器以便比M_HDR*中编码的值的拉伸更准确地呈现那些明亮颜色。所以人们仍然能够在典型地将会给出HDR场景的非常好呈现的M_HDR*范围之外添加一些相当明亮的(或相当黑暗的)颜色,并且人们可以典型地强烈压缩这些颜色,即仅用几个值表示它们,其中HDR_FREP中的代码与实际场景亮度高度地非线性相关。例如,当看着像例如夜晚的婚礼场景这样的非常高对比度场景时,可能在编码有用对象的范围M_HDR*以上长时间什么也没有,并且然后存在弧光的亮度。我们可以用弧光的强烈多色调分色形状(即,几个代码)来表示那些并将它们置于刚好在MAX_REF以上。这已经会是一种具有该弧光的合理表示的方式(色域已映射到典型地在HDR显示器上可呈现的颜色附近的颜色),但是如果人们想要他还能够在元数据中使如何将它们移位到与场景中的实际亮度更接近的亮度的函数移位(例如,亮度偏移常数)的话。我们示出能够进行这种捕获的HDR摄像机的可捕获亮度范围CAM_1,并且其一部分编码在M_HDR*内,例如直接通过(可能地利用线性常数乘法器)将相对亮度值分配给M_HDR*内的亮度值,或者人们能够已经使用自动进行第一种分级(例如,在某种程度上将较明亮或较黑暗的亮度更多地推动在一起)的某种映射函数。然后将摄像机捕获的最明亮亮度存储在高达颜色编码的最大值MAX_REP的溢出范围RW_STR_HI中。我们已经示出一个示例,其中我们能够将某一黑暗等级编码到代码0上,并且能够利用某种映射来以高达MIN_REP的负值存储甚至更黑暗的亮度。我们还示出例如人们能够如何将特殊效果绘入颜色编码HDR计算机图形CG中,如明亮曝光。
返回到图2,人类分级者使用图像分级单元201,所述图像分级单元201被布置成进行一组颜色变换中的任一个。这可以是遵循像例如可逆性这样的数学准则的颜色变换函数的有限集合(关于可逆性,我们一般的意思是在充分精确的颜色编码中,像利用浮点那样,人们能够将函数反转以在应用变换之后从其输出图像重新导出输入图像;关于颜色,我们的意思是至少像素、区域或对象颜色规范的亮度-相关),或优选地它是允许分级者以他喜欢的任何方式对图像分级的函数的广泛集合。典型函数的示例是由例如Da Vinci Resolve或Adobe Photoshop支持的那些。在该阶段,内部地,我们可以假定所有处理仍然发生在颜色系数的[0.0, 1.0]浮点编码中,其中精度定义包括在图像分级单元201中在稍后阶段当选的量化。然而输出LDR图像Im_LDR将典型地已根据图像或视频编码标准编码,例如对于未压缩的信号,它可以在YCrCb颜色空间中量化,或者它可以被小波压缩等等。该图像的实际格式化,例如切成数据块,同时插入报头和其他元数据,将典型地由格式化器220来操纵,所述格式化器220例如向用于图像102的存储器输出图像信号TSIG。可以根据例如蓝光光盘规范或根据用于在闪存卡或硬盘等上存储的某种定义来将该信号存储在该存储器上。技术人员将理解,类似地,能够在某种数据连接上,例如无线地,向具有用于存储TSIG或(多个)图像的永久或临时存储器的家庭服务器发送图像信号TSIG。
在图8中我们给出分级器能够如何从输入图像开始分级以创建输出图像的示例。我们将聚焦于子范围的明亮度的关系,并且稍后给出如何操纵像素颜色的色彩分量的几个示例。假定输入(In)HDR图像像素以它们的亮度L_HDR编码,并且LDR中的输出值是编码,所以我们称它们为lumas Y_LDR。尽管我们的方法绝不限于具体比特深度,但是假定lumas范围在[0,255]中。现在分级者将研究具体输入图像以便处理(对于视频,这将是要被类似地颜色映射的图像镜头中的关键图像),并根据他的偏好设计最优颜色映射,在示例中多段映射。假如我们具有在HDR亮度Lt_1以下的覆盖部分(例如,在树木阴影下,其中主要演员处于那里)以及在背景中比较明亮的一些房屋。所以它们的HDR像素亮度将落在Lt_1以上,但不必是最黑暗的一个落在Lt_1正上方。另外,可以存在亮度在Lt_3以上的非常明亮的照明器。现在该场景与我们的上述经典LDR场景不同。我们具有两个感兴趣的场景,围绕演员的阴影(其中我们期望使演员非常可见,又明显比场景的大部分更暗)和周围背景中被阳光照亮的房屋。分级器能够例如推选以使包含充分明亮和对比性的面部颜色的区域在Lt_11和Lt_12之间,以使面部清晰可见。他可以以较暗的颜色为代价来这么做,所述较暗的颜色需要用很少的Y_LDR代码值来编码,并且在Lt_13以下它们甚至将被剪裁到Y_LDR=0。他还将通过降低该段的斜率来以较低的对比度精度对Lt_12和Lt_1之间的亮度编码/分级。这在针对阳光照亮的房屋的Y_LDR范围中创建空间,他在该空间中写入通过拖拽控制点CP而限定的曲线。能够刚好在房屋 luma Y_H的末端以上编码未出现的颜色的亮度间断之后的照明器颜色,或在这以上开始几个代码(例如10)。
现在,在我们的LDR容器理念中,这种颜色映射曲线能够不仅用作针对输出图像的颜色样子优化曲线,即例如典型地从HDR分级导出的LDR分级,而且还用作代码限定曲线。类似于例如MPEG的伽马0.45曲线,其限定针对每一个输入或呈现的亮度的luma编码,我们的最优曲线限定具体代码值向输入HDR图像中各种亮度的分配。但是因而同时各种图像对象或其亮度子范围也已经沿着luma轴正确地定位,以便直接(或者也许有很少的变换,其可以牵涉到像EOTF操纵这样的物理显示特性预校正;或经由简单的显示变换向具体的例如变暗的观看环境的微小调谐)驱动LDR显示器。
所以我们已经改变或概括LDR编码技术的几个基础真相。具体地,问在HDR中的白色是什么的问题(在动作出现的最佳效果点照明室内中的白纸,或在外面阳光照亮的房屋的白漆;其中人类视觉还能够非常聪明地在语义上操纵所有这些),我们已经放弃使所有事情都束缚于具体白色的念头,或其相关,如场景/图像的“所述”中间灰色。作为其可替换方案,我们提出颜色体系,所述颜色体系能够作用于自身,而无论与像某种白色这样的具体颜色的亮度关系如何。例如,能够存在针对阳光照亮的房屋或照明器的体系,其能够具有其自己的操纵,其现在在没有必须准确参考的情况下能够是语义相关的而不是精确数值的。我们已经给出明亮的室外或非常明亮的灯的示例。取代用做出(例如平均或最低)室外明亮度的固定亮度关系,例如5x更亮,我们能够使它们仅仅是“适当量地更亮”。适当量则能够最终在显示器侧确定。例如,15000 nit的非常明亮的HDR显示器能够使外部20x更亮,但是受限制的显示器可能需要将所有阳光照亮的房屋填满上限范围内的颜色,而其只是比室内颜色平均1.5x更亮,从而只是给出它是阳光明媚的外部的事实的初始模拟。类似地,黑暗区域可能并不确切地像用亮度Lx、Ly等那样呈现,而是呈现为“刚刚可区分的”。智能HDR解码和优化系统能够考虑显示器和环境的细节,并且能够从限定的分级调谐开始进一步优化最终的驱动信号。
所以其次,这意味着我们放弃了认为像接近人类视觉的主总体伽马0.45这样的单一固定代码限定曲线至少在整个LDR亮度范围上是合适的概念。不管我们是严谨地(即,显示器应当尝试将它呈现为尽可能接近其在例如LDR基准监控器上将看上去的那样,即具有最小自身调谐)还是自由地(其中分级只是相对的引导,近似地声明人们能够如何使颜色失真以例如在亮度的更有限物理范围上保持某种程度的艺术意图)使用任何颜色分级,在一些实施例中,我们都将允许分级者创建甚至任意的代码限定函数,其甚至可以是非连续函数。
并且第三,我们声明应当不再存在单一分级图像,而是需要针对每个呈现情形来优化分级。并且人类视觉是复杂的,尤其是,呈现系统在它们的性质方面改变得越多,这能够以(特别简单的)自动颜色映射来进行得就越不正确,并且人类分级应当最优地做出的若干分级就越多。但是在实践中我们看到,对于给定必要投入的许多情境,仅具有两个分级(针对LDR的经典,以及针对HDR系统的HDR分级)将是充足的,并且在需要更精确调谐的情况下,系统则能够通过基于这两个分级在技术上从它们包含的艺术信息内插或外推它们来更逼近良好的分级。
在Im_LDR的分级之后停止并将该LDR容器图像与预测函数一起写入到图像存储器上以可逆地从中重构主HDR的近似M_HDR(也许对于一些系统来说,使用严谨可逆的颜色映射的分级者不是必要的,因为对于更低质量的系统来说,重构明显偏离M_HDR的REC_HDR可能是足够的,只要从Im_LDR数据导出的HDR效果仍然产生相当类似的HDR样子即可,在这种情况下人们可以联合编码这样的HDR重构颜色映射函数,其具有逆,所述逆则是由人类分级者使用的实际颜色映射的近似),对于例如用12或14(非线性)比特限定Im_LDR编码(依赖于各种应用的要求)的系统来说将是有利的。当到达更严苛的规范时,像例如8或10比特(其中大多数人将会说他们难以编码HDR图像,但是由于人类仅区分仅几百万种颜色,并且依赖于像具有很大噪声的快速移动视频这样的应用,所需颜色的量可能甚至更少,所以如果人们想要将所要求的最重要的颜色正确地编码成8比特,这应当是可能的),可能有用的是进行我们的发明的另外步骤以确保LDR和HDR分级两者的改进质量,同时允许关于这些分级应当看上去如何(即,所有对象应当落入哪个亮度(-相关)子范围)的分级者最大灵活性。
在我们的图2的接续中,我们现在假定示例:分级者用任意亮度-映射函数非常自由地分级,并且LDR lumas被量化成仅8比特。Lt12和Lt_1之间的映射曲线的斜率可以很低,使得代码太少以至于不能忠实地表示那些颜色,例如阴影中植物的颜色。在LDR呈现中,这可能并不如此的不能采纳(其实不是,或者分级者没有以那样的方式指定曲线),然而在重构针对这些对象的HDR亮度之后,多色调分色法可能在这样的高质量呈现中向那些对象给出不能采纳地低的纹理质量。
因此,自动分级单元203将要分析人类分级者的LDR分级Im_LDR,并识别和解决这样的问题。存在单元203能够这么做的若干方式。其能够例如纯粹地看图像本身,并比较其空间区域。例如,其能够看Im_LDR中的区域(比如,黑暗的面部)并对表示它的luma代码的数目计数。单元的内部规则可以指定:任何区域,或尤其是面部区域,不应当以小于MB(例如10)个不同代码值(或通常多个颜色,典型地基于其luma的数目,但是对例如可表示的不同饱和度的数目可以将类似的约束计算在内)来表示。或者单元203能够将Im_LDR中的区域中的代码量与HDR图像中的不同代码量(典型地亮度,但是M_HDR也可以以不同的亮度-相关编码)相比较。如果M_HDR中存在许多不同的值,则Im_LDR中应当针对该区域也存在相当数目的luma。例如,规则能够是:Im_LDR lumas对HDR亮度的分数不应小于1/5th或1/10th等。人们能够基于针对M_HDR的浮动点亮度空间中的范围来类似地限定关系。能够进行更复杂的图像分析,例如研究几何形状并估计在由更少颜色表示时这样的形状如何偏离。例如,检测器能够识别形状中的模糊点(blob)。这是条带检测器的概括,所述条带检测器检查在Im_LDR中或实际上REC_HDR中是否存在具有相同多色调分色值的多个像素的运行(run),其中它们并不存在,并且实际上是M_HDR中的平滑函数过渡。从纹理估计器能够获得另外的信息,所述纹理估计器可以确定例如图像区域的局部复杂度等等。即使自动分级GT_IDR的确定没有要单独基于对任何可获得的图像(分级)本身的分析,但是如果自动分级单元203包括能够进行任何以上分析的图像分析单元213也是有用的,因为在致力于分级的颜色映射曲线的系统中,即使在指定模板曲线时,所得数据也是有用的。
曲线确定单元211包含到其,并且我们将关于图9和图10来阐明其可能的一些实施例。在任何情况下,无论自动分级的确定是基于分析图像、像亮度映射函数这样的映射算法、还是两者、还是任何其他分析或规定来实施的,典型地曲线分析单元211将具有确定并输出最终颜色映射算法或函数Fi(MP_T)的单元(并且可能还具有实施颜色映射曲线或算法分析的若干算法中的一个或多个算法的单元,由此算法本身能够被分析,或者如同在由(多个)曲线表示时它对颜色如何表现的那样)。这种自动映射就是人们现在能够如何从M_HDR导出GT_IDR,所以颜色映射单元215将通过对M_HDR应用映射Fi(MP_T)来导出GT_IDR。当然,人们需要考虑在这种新的公式化中,人类分级Im_LDR是什么,现在人们将使每件事都参考GT_IDR。所以LDR映射单元217将分析能够如何从GT_IDR获得Im_LDR,并从中导出参数。如果像素亮度从L_HDR = 2000映射到Y_Im_LDR = 180以及到Y_GT_IDR = 200,则人们能够导出后者之间的映射。在这样的函数形式下,能够通过针对每个luma应用以(Y_Im_LDR/Y_GT_IDR)乘以Y_GT_IDR的函数来导出沿着该范围的Y_Im_LDR。针对其他映射能够导出类似策略。
利用图9,我们阐明了通过研究人类分级者的分级曲线(无论是单独地、还是借助于图像分析、还是潜在地甚至通过人类分级者交互)将人类分级重新确定成技术分级的计算上简单的方式。我们将看着曲线失真示例,但是技术人员能够理解,能够使用类似的分析来选择一组运行良好的曲线中的一个曲线(图2中的一个或多个CRV_i曲线)。如果分级者期望在中间区域中平滑的对比度较小的行为,而在外部区域中的拉伸行为(例如,至少在一些情形中,在HDR上,出现主要动作的主导区域可能需要是丝般平滑的,而在背景中的照明器可以被更粗略地呈现,甚至条带可以不引人注意或最不重要),则人们能够(例如基于函数相关的计算)从一组预先商定的曲线中选出一个曲线,所述曲线最佳地匹配这样的行为,但是对于中间部分不具有过高的量化。这样的选择可以由另外的图像分析来引导,如确定图像属于哪个类别(阳光明媚的户外或具有一些明亮的灯的夜景),看直方图分布及其参数(例如所估计的瓣的位置和大小等,(半)自动地或通过人类颜色分级者的经验)。即,可以存在几个预定义的曲线901,其至少从精确的角度给出合理的行为。考虑到分级者的分级样子愿望,必须围绕这样的行为协调实际图像。当然无论实际量化是良好对理论上最优还是合理地工作,情形还依赖于具体图像中有多少个具体颜色的像素。例如,如果黑暗部分只是通过网格向下水道里面看的一个小片,比如说图像的右下角的50x50像素,则对于分级者来说,至少对于该图像、镜头或场景,某种量化可能是非常可允许的。即,各种曲线可以均用作对技术分级的最终选择(在存在一个或几个主引导曲线的情况下——例如依赖于目标显示器白色点,如图像主要打算用于1000 nit还是10000 nit显示器,或者呈现环境的另外特性或图像性质——在亮度或luma范围上确定量化精度),或者它们可以用作起始点,从该起始点可以微调技术分级曲线,直到它最大地拉伸其代码精度失真以用于更严格的图像分级(典型地要重构的HDR),并且由此我们能够仅通过要应用于该技术分级GT_IDR的变换函数来编码对其他分级样子(典型地LDR)的另外要求。
但是现在我们将描述示范性曲线失真算法。我们将计算一定量信息的特定实施例,所述一定量信息是针对每个亮度子范围的一定量所使用的代码NC(并且我们还可以通过典型地沿着该范围均匀分布一些整数代码而在M_HDR中数字化连续范围)。我们将会看要研究的特定测试范围(在L3和L4之间),但是,尽管一些实施例可以仅测试一些范围,如黑暗范围,然而如果所有M_HDR亮度范围都如此测试这是有利的。人们能够类似地公式化是否将某一M_HDR范围映射到比如说5个Y_LDR代码,或者是否将其子范围映射到单一Y_LDR值。
方法起始于基准编码函数901(图2中的REF_CODF),其指定针对每个范围需要多少代码以便在REC_HDR中良好可重构。技术人员应当理解,这依赖于技术参数并且能够从技术参数计算,所述技术参数比如是属于M_HDR的基准显示器的动态范围、Im_LDR分级的预期细节等等。尽管这样的一个或多个基准编码函数可以在任何编码器上空中计算(并且可以然后可选地在信号TSIG中作为元数据输出),然而这些基准编码函数典型地可以在例如分级软件制造商的设计实验室中预先计算,并且因而以至少编码器的存储器中存储的商定方式计算(原理上,解码器不需要该信息,但是也可以具有该信息,例如在像Fi(MP_T)这样的函数被限定为与这样的基准函数的关系的情况下,但是为了简单起见典型地情况并不如此)。如果编码器具有若干变形,则编码器可以根据要如何呈现最终Im_LDR和REC_HDR来挑选一个,并且这可以通过人类分级者的一些软件选择而发生。函数901指定对于每个亮度间隔需要多少代码。例如,在示例中,决定仅会将8比特Y_LDR_min的,即实际上Im_LDR的,三个代码(在给定所允许的重构或表示误差的情况下,所要求的代码的最小数目),用于比L1暗的所有HDR亮度。所以这些黑暗区域将被粗略地量化,但是尽管如此它们将会具有某种结构。如果人们使这些区域变亮,局部图像对象的严重多色调分色可能出现(无论是在HDR重构呈现中,还是在经由变亮显示变换的经修改LDR呈现中),但是这可能已经是最终决定以便能够在该8比特代码中编码足够的HDR图像(如果一组可编码图像包含非常高对比度的多个体系图像,则人们必须典型地至少牺牲一些质量)。然而,黑暗区域常常将被呈现得如此黑暗,以至于人们在观看环境的显示器荧光屏反射中无论如何都无法看到太多细节。为了能够相当忠实地(给定在黑暗观看环境中示出重构的REC_HDR时敏感的人眼)以高达L2的间隔呈现黑暗颜色,曲线规定要求最小C2-3 luma代码(当然人们可以使用更多代码)。限定这样的曲线意味着人们可以编码HDR图像高达等于例如255的最大LDR luma Cmax(如果LDR容器具有可用于其luma的8比特;注意,这能够简单地被看作固定的高达1.0的色域方块,并且用等距bin量化,但是图像像素的分布依赖于所应用的变换而变化,HDR图像例如常常有大百分比的像素在0.1以下),其在该8比特容器实际正编码HDR图像的情况下依赖于曲线而对应于例如10000 nit的最大亮度L_HDR。注意,曲线能够被调谐为考虑所呈现的亮度的相对缩放本质,并且在该描述中我们的意思是我们能够在例如L1/10(作为在0 luma中仍然可量化的合理黑色)和10000 nit之间表示HDR基准显示器亮度,但是人们当然可以总是通过缩放使得一些其他亮度被呈现而进行调节。为了简单起见,人们能够安全地假定L_HDR和Y_HDR都具有在0.0和1.0之间的轴,并且然后被量化到某一精度。
技术人员将理解,这种基准编码函数901能够由若干因素指定。例如,当人类分级者在(例如M_HDR)图像的可为例如面部区域的区域上涂鸦时,图像分析单元213可以从中确定那些面部颜色所落入的HDR亮度范围。然后它可以重新指定曲线,使得要求更多luma来表示它。它可以知道,例如如果分级者打出“面部”指示按钮,则典型地对于任何情形需要多少代码(即,量化bin)(即例如根据36%规范,面部没有被良好地照明,但是例如落入场景的更黑暗阴影区块中,从而使其平均亮度为例如10%,并且LDR容器为例如10比特并且所要求的HDR呈现对于例如4000-5000 nit而言最优)。这将引起围绕平均当前面部颜色的点的多个bin的规定(典型地在HDR轴上,但是它也可以在Y_LDR轴上)。这可以是自动的(例如,加倍或修改该范围所覆盖的HDR基准呈现的JND量),或者分级者可以直接影响或指定在该区域中函数901的形状。曲线可以在许多性质上被指定或重新指定(如果需要的话),像例如HDR_image的测量一样。现在看产生Im_LDR的分级的实际亮度映射曲线902(即,分级者当前关于量化和数据损耗等不作考虑,而是仅艺术地限定他希望在哪里他的对象颜色将在该图像的标准化色域中,以实现例如梦幻的样子,可能具有所谓明调的高明亮度),我们发现在间隔[L3,L4]中,给出从HDR主分级到所挑选的LDR样子的这种映射曲线的情况下实际出现的代码量小于对于该区域的最小要求量NC (我们为了清楚的叠加而使曲线移位,但是当然所使用的luma的确定能够简单地针对任何曲线进行)。注意,我们已经假定luma是在范围中等距地确定的,但是我们可以类似地考虑非线性度,例如通过聚焦于向单一luma的(不)可允许映射。但是通常在Y_LDR轴上我们将会具有等距的bin,所以我们能够以那样的方式讨论而不失教导的一般性。
所以我们当前在该间隔中使用过少的代码(这将在LDR呈现中示出为低对比度,但是或许因为分级者刚优化过该曲线而不是这样,但是将会典型地显现为对于所重构的HDR图像的粗略量化),并且需要拉伸曲线902的局部斜率。存在若干方式来这么做,例如用弹性误差函数,所述弹性误差函数在任何间隔上处罚量化误差。通常,我们可以考虑任何数学计算,一方面具体间隔的尺寸,并且另一方面这些间隔的平均亮度/luma位置,即曲线偏离预期分级多少。当然,如果技术分级的需求使人们需要与分级者对于LDR样子而期望的形状相差甚远的具体映射曲线形状(即,映射函数的技术HDR-数据要求或代码分配目的与映射的“LDR”要求或呈现样子目的相差甚远),则分级者将会继续经由另外的映射函数以另一附加方式来限定他的样子。所以在原理上对于该方法不需要严苛的规范或严格的数学计算,但是当然一些方法将是不那么计算复杂的或者在分级者如何迅速达到期望的编码+分级结果方面是更加用户友好的(因为至少对于一些种类的节目来说分级者时间宝贵)。
我们利用图10阐明了简单的曲线变换。如果Nc1是分配给间隔的当前luma量,并且Nc2是所需的代码量(无论是最小需要的还是在某种程度上更大),则人们可以通过例如围绕中点乘以Nc2/Nc1来拉伸曲线的该部分。曲线的其余部分必须被修改,并且我们假定重新分布量化以适应总代码量已经将会给出令人满意的结果。例如通过得到该曲线,将该曲线偏移OFF_1,并缩放该曲线使得最大值仍然落在最大luma上,人们能够导出曲线在L4以上的部分。通过到处这么做,人们获得技术分级曲线903,其是颜色映射Fi(MP_T)的曲线。Y_LDR_min轴上的luma则将会形成GT_IDR图像。系统可以检查是否存在然后变得严格的另一范围,并然后例如平衡两个区域之间的误差。例如理想地,Nc2应当是10个代码,并且在L_HDR的另一范围(即,也是Y_LDR)上的Nc2*可能需要理想地是8,但是如果仅存在针对总计16个代码的空间,则人们可以将最小量化误差分布为9个代码和7个代码。当然这能够由这样的因子加权为两个区域的范围、语义意义(是否存在面部颜色)等等。如果必要,系统能够提示分级者例如借助用户接口挑选两个区块中哪个应当更好,所述用户接口允许他逐步增加代码数Nc2(即,局部斜率),这对于Nc2*则意味着更少代码,分级者对此可能认为是在视觉上可接受的。当然,一些实施例可以在选择技术映射曲线和分级GT_IDR时在场景后面完全自动地工作,并且在这种情况下系统可以例如只是放弃围绕优选LDR分级曲线的微调,并且立即跳转到预定义的良好工作的技术曲线之一(例如,与限定曲线(902)的LDR样子相比具有最少失真的曲线,如计算为SUM(wi*[FT(L_HDR)-FL(L_HDR]),其中括号指示像绝对值或平方这样的某种函数,FT是针对每个值L_HDR的当前选择的技术函数,并且FL是分级的优选LDR样子映射,并且权重wi可以是均匀的,但是也对L_HDR的某些区块,例如,像面部所在的位置加权更多),在这种情况下样子则由另外的映射函数Fi(MP_DL)来限定。误差测量也可以考虑斜率,因为局部斜率标识LDR表示中可用代码的量对HDR区域中所要求的代码。注意,与分级者希望看到的相比,甚至改变一个间隔实际上都将误差分布在整个范围上, 但是这不需要一定是大误差,因为误差是分布的并且被相对地看到,因为眼睛无论如何没有被真正设计用于担任绝对亮度计,并且在任何情况下对于最实用的系统而言误差能够在接收侧用Fi(MP_DL)再次计算。技术人员理解,能够存在许多其他方式来实现类似的功能。例如,可能是这样,存在足够的代码(由于M_HDR图像并不一直达到与Y_LDR_MAX相对应的L_HDR_MAX),并且人们可以在重新指定函数903的至少一些部分时具有很大自由度,曲线902仍然在间隔[L3,L4]中过度量化并且必须被校正。在这样的情境中,人们可以更自由地移位间隔[L3,L4]的中点luma和其他曲线区域。这样的情境对应于一些对象的变亮等。其他情境是,系统相当严格,并且在间隔[L3,L4]外部重新分布量化可能在那里引起不适当的量化。在这种情况下,能够使用缓解策略来确定最终曲线。缓解策略的一个示例是在像[L3,L4]和[Lx,Ly]这样的最严格范围上分割剩余的误差,在所述最严格范围之外,对于当前分级曲线或者试图保持与当前人类分级者的曲线相当逼近的任何曲线而言,出现最大量化误差。人们还可以决定将误差强烈地分配给一些区域。例如,人们可以将甚至在某种程度上在L1以上的亮度剪裁到单一0 luma值,或者人们可以决定在明亮端剪裁,甚至在技术分级GT_IDR中。REC_HDR图像然后优选地不是可重构的,但是这样的情境能够用在具有溢出校正的系统中。例如,剪裁值能够编码在第二图像中,与GT_IDR分离,其仅包含针对GT_IDR中明亮的剪裁区域的数据。在将实际映射曲线与具有良好技术性质的映射曲线(特性在于它针对每个间隔具有至少最小量的代码)相比较时,当然自动分级单元将检查在该间隔中是否存在实际任何像素颜色,否则它可能在该范围内严重扭曲函数。
图12(图12b)示出了分级者能够如何影响分配用于技术分级GT_IDR的代码的技术曲线的示例。如所述的,所有这些能够在一些实施例中在分级者不知道的情况下发生在屏幕后面,但是这里我们给出分级者能够如何指定或影响分配给HDR亮度范围1210中的具体区域的代码的量的示例,假定其包含面部颜色。假如在该示例中代码区的自动分配是很好的(可能考虑到我们仅有8比特luma而非10bit可用,或者也许对于10bit来说是不太适当的颜色空间,其至少对于像例如饱和蓝色这样的一些颜色引入过于严重的量化),但是看着他的质量基准显示器的分级者仍然在某种程度上想要更大的精度,例如以便具有不太有斑的面部。然后他可能认为亮度范围1210中的局部斜率过低,并且可能想要经由用户接口斜率改变装备1203来提高局部斜率,所述用户接口斜率改变装备1203可以是例如箭头或可拖拽光标等等,所述箭头在人们敲击顶部箭头时将斜率增加X%。他可以直接在他的曲线工具观看窗口中指定范围1210,并拖拽一个或多个限制设置器1202。用户接口还可以通过例如允许在来自场景的当前分级的代表画面上绘制涂鸦1215来帮助快速选择(参见图12a)。
一直以来分级者在看着重构的HDR图像呈现。如果他现在想要再次致力于LDR图像,则他切换到该视图并再次从该技术曲线开始进一步将其LDR分级指定为额外的映射曲线或策略。用于跟踪面部并在其行走于可变照明中的情况下微调其性质的运动跟踪装备可以在必要时帮助确定,但是通常对于本发明来说我们不会需要这样的复杂度,因为技术曲线仅应该普遍地相当良好,而不是最终特定。但是在任何情况下都能够向分级者供应在他认为感兴趣的电影的任何时刻对技术曲线和映射曲线两者的微调,以获得最优LDR图像。现在,软件可以被配置成与中点相比改变斜率(曲线1204)。然而,分级者可能认为这引入了分级颜色问题,他可能现在想要解决该问题(而不是在第二LDR映射函数中)。例如,当算法或硬件计算新的曲线时,它将在最简单的版本中重新分配误差,它可以例如通过从局部拉伸间隔的新高点开始将曲线的其余形状拉伸到最大1.0值来这么做。但是分级者可能认为这在区域1205中给出过于明亮的颜色。因此软件可以具有位置调整装备1206,其允许分级者在范围1210中在某种程度上向上或向下移位局部曲线,从而得出最终合理的曲线1207。分级者还可以以简单的方式指定他认为量化误差可能更严重的区域,例如在这种情况下滑块1201可以允许他在需要时针对在某种程度上可能被量化更多的明亮颜色范围设置更低的边界。如果人们需要在给定所有技术限制的情况下平衡颜色特性,这可以是达到合理最优的良好方式,尤其是在原始素材无论如何没有优选地在明亮中捕获,但是例如具有某种程度上柔和化的颜色的情况下。该滑块然后例如给出基准HDR亮度位置,在该基准HDR亮度位置以上存在例如经由例如伽马2.2或精神视觉的基于JND的曲线等而分布的20m代码。在这种情况下,算法数学可以在重新分布误差时考虑这一点,例如通过处罚来自加权方式的20个代码与范围1201的高点和由1201设置的上范围的低值之间的其余代码之间的差异。当然,如果分级者认为该问题足够严峻以至于花费更多的时间,则分级者还可以选择这样的范围中的一个或多个范围以微调,并例如向已确定的曲线添加固定阻抗,指示它们可能不损失任何代码或最大20%的代码,或按照比当前间隔等低10x的速率损失代码等等。这在重新指定另一间隔中提供某种惯性。但是通常分级者将不会必须重新编码许多临界区域,否则他可以仅令硬件伴随自动提议而来。
图3示出了遵循我们的发明的原理的编码系统的可能实施例,其中人从技术分级GT_IDR导出他的分级。读者将理解,我们在这里教导的技术变形(例如,关于合适的技术颜色映射等)也将会适用于图2类别的实施例或其他实施例,并且反之亦然。
颜色映射导出单元214确定合适的颜色映射(例如,亮度映射曲线以及相应的彩色坐标操纵策略),以将M_HDR映射到GT_IDR中。其主要目的是确定从技术观点来看最合适的分级GT_IDR。具体地,人们应当能够重构REC_HDR(通过应用CMAP_2,其是Fi(MP_T)的逆颜色映射),所述REC_HDR将会(根据某种图像偏离准则)最逼近M_HDR或至少落入相对于M_HDR的预定义第二准确度之内。技术人员理解,存在所限定的若干方式来测量图像之间的偏离。例如,普遍的测量是PSNR,但是PSNR是相当简单、盲目的测量,其有时能够对于神经视觉上难以看到的噪声的差异给出大的贡献,而它们将某些真实对象偏离测量到更小的程度。所以我们希望使用更严苛地测量各种对象发生了什么的测量,尤其在与神经视觉原理相关的数学框架中。例如,图像分析单元213能够进行段(伪对象)中的REC_HDR和M_HDR的某种近似分段。其能够例如寻找相对平滑的段,并测量那里的多色调分色的量。参量能够是例如所使用的颜色的量对平滑梯度区域的面积,其将会导致准确度测量,其类似于对具有相同量化颜色的像素的运行的运行长度计数。人们还可以计算空间之上的原始M_HDR亮度形状的函数相关或累计的差异以及REC_HDR中的阶梯函数。技术人员将理解,人们能够在我们对准确度的评估以及得到的映射算法的(多个)挑选中引入(预先)语义信息。例如,如果仅存在小对象,尤其是如果它在图像侧面附近的背景中,则该对象可能不太重要并且我们能够用较少的luma代码来编码该对象,从而使更多代码可用于其他代码。技术人员将理解,总准确度或误差(例如,作为准确度图像)能够从一组预先商定的(例如,经由软件更新加载在自动分级单元303中的)测量算法形成,所述测量算法能够考虑几何性质,如段或对象的尺寸或位置;统计性质,如段/对象是哪种纹理或颜色;语义性质,如我们是在看着面部还是天空(用面部或天空检测器)等等。准确度数学计算还可以具有特殊测量来分析HDR效果,例如,可以不作为REC_HDR和M_HDR之间像素颜色的绝对差,而是用相对测量表征分解,所述相对测量基于像火球和环境中平均颜色之间的差异、火球中颜色的变化等这样的参数。然后REC_HDR将被看作充分准确的,如果其测量在阈值以下或以上,即,即使火球在重构中有些不太明亮或对比不太强烈,只要由于火球仍比环境明亮得多而导致火球具有充分的冲击,则重构就被看作良好的HDR重构。对于因像GT_IDR编码中的比特量这样的物理资源的严苛而更加严格的系统来说,这样的变形尤为有用。HDR效果可以以复杂的方式表征,或者仅被选作例如在相对阈值LT以上的高明亮度的区域。技术人员还将理解,在例如逐步达到最优颜色映射Fi(MP_T)的递归策略中,颜色映射导出单元214可以不简单地基于合计的总准确度来限定其映射,而是基于部分准确度来微调。类似于我们的图9和图10的局部调整示例,单元214可以补救被表示为粗略的面部,因为单元214识别面部中的斑,然后通过改变函数的该部分来分配更多代码。不需要通过计算其本身来符合准确度准则。而是,我们能够使用一组预先商定的函数或颜色映射算法ALG(CRV_i),认为其从实用的角度来看对于具体应用来说合理地满足准确度准则。即使所选择的最优映射曲线将在某种不方便的M_HDR图像的某一部分引入某种程度上更严重的误差,这然后被看作是可接受的。在这些情境中的任何情境下的确定能够不但在单元303内部是自动的而不存在打扰艺术分级者的任何手动干预,或者它还能够被分级者部分地引导或完全地确定,例如通过令分级者从多个可能的映射算法或曲线中选出一个映射算法或曲线。典型地,单元303将知道,并且分级者将设置与映射和编码情形有关的一些通用参数,例如M_HDR图像的动态范围(例如CODR或CDR),并且分级者可能已经从他当前分级的菜单列表中选择“夜晚图像”等等。
例如,图像分析单元213可以看M_HDR图像,并发现在亮度直方图中具有两个良好分离的瓣(lobe)。然后可以导出(至少初始的)映射函数,所述映射函数将这些映射到8比特luma代码的适当子范围,考虑到人类视觉系统对较黑暗的部分更敏感,这因此将需要更大的子范围。所以在粗略规模上,映射可以到达例如[0,170]和[180, 255],即实现这种情况的任何函数都是可行的候选。在这些范围内,可以进行Fi(MP_T)的映射曲线的进一步弯曲,例如为面部给出某种程度上更多数目的代码(为了清楚,其本身不需要对应于最终呈现中面部中的较高对比度,因为显示变换仍然能够降低面部上的对比度,但是然后至少我们具有面部纹理和照明的良好精度)。
最简单的版本能够是例如一组参数伽马类曲线:在L1以下的Y_LDR=k*L_HDR,以及在L1以上的l*power(L_HDR, gamma)+off。在这种情况下,自动技术映射确定算法可以典型地评估黑暗区域中图像结构是什么,并据此确定充分好地表征的线性部分。如果存在多个对象,尤其是具有错综复杂的几何结构(如,包含许多对象的棚,所述对象比如是存储以便稍后构造的木板、金属框架、工具等,所有这些在黑暗中彼此之间堆叠),则单元/算法可以决定通过调整伽马类曲线的第一(例如线性)部分来为此分配更多的代码。类似地,如果黑暗中存在演员,则系统可能想要用足够的代码来表征他们,即使他们最终被非常暗地呈现,并且观看者无论如何也不会看到身体的过多细节(但是注意,观看者可以总是经由他的遥控器应用变亮显示变换,并且良好的编码应当迎合这一点)。
类似地,能够在中间部分(例如,像运动分析器这样的另外图像分析算法能够帮助确定主动作的区域)、明亮部分和黑暗部分中分析和分段图像M_HDR,并且然后能够对此确定S形或三段式曲线,等等。
可替换地,能够提示人类分级者经由他的用户接口230来选择最优技术曲线。例如,他可以从多个伽马类曲线中挑选最优的一个,但是技术人员理解,这可以是其他固定预先商定的曲线,并且在递归的技术优化中,分级者甚至可以通过例如拖拽控制点CP来开始调谐曲线。曲线然后可以例如具有某种内部弹性机制,从而禁止分级者挑选具有过低斜率或像倒置、双分配(其不能被反转为CMAP_2)等这样的其他不适当特性的段。典型地,算法将自行到达稳定状态(初始的或瞬时的),例如通过在曲线变得不可用地失真的情况下发声警报,并且然后将其重新设置为具有良好重构性质的类似一个。典型地,系统然后将会生成REC_HDR,并允许分级者在他的基准HDR显示器上切换M_HDR,以看到准确度或误差。系统将会把GT_IDR发送至基准LDR显示器,所以分级者也能够检查此。该图像可能在一些情境中已经是足够的,并且然后分级者不再需要做出第二Im_LDR,但是即使它是较低质量的LDR分级,一些接收系统可能仍然想要或需要使用它(例如,由于对于忽略颜色映射数据并且仅播放GT_IDR的传统BD播放器而言,在TSIG中的后向可兼容实现;但是例如GT_IDR也可以包含用于调谐/内插的有用信息以便最终成为针对中等动态范围显示器等而使用的分级)。在分级者满意的情况下,他将会继续下一幅图像或图像镜头,并且否则他将会进一步对曲线或算法做一些改变。编码器可以具有用于帮助他这么做的装备。例如,当他在具有大误差的区域内涂鸦时,编码器可以在曲线上绘制这些颜色落入哪个亮度间隔。可能甚至已经存在伪像的初始分析和建议(例如,“建议将代码量加倍”以及已经应用新曲线以获得第二REC_HDR_2(通过颜色映射单元215),因为单元/算法必须自己尽量多做以使繁忙的艺术家尽可能多地免于这种技术分级——尽管由于它是对于最终样子的简单粗糙分级而导致它是重要的)。
现在,在图3类别的实施例中,分级者将通过使用颜色分级单元301继续在GT_IDR图像上微调,以获得他的最优样子作为分级Im_LDR。原理上,他现在可以自由地应用任何颜色变换,因为IM_LDR不用于重构REC_HDR。然而在实用系统中,如果支持颜色映射算法的有限集合,则这是有用的,所述颜色映射算法的有限集合允许分级者可能典型地想要做的大多数或全部颜色改变,因为它们的限定数据Fi(MP_DL) 需要被编码在信号TSIG中。应当优选地将一些信号标准设计成可升级的,使得稍后的新颜色映射的数据能够被写入元数据中(具有新的类型指示符,可被较旧系统忽略)。对于可容易地升级的未来解码器,比如运行在计算机上以解码从互联网-电影数据库购买的电影的软件,这是有用的。对于具有较短周转(turn-over)的系统,其中对于所述系统而言只在某些时候(关于总系统成本是昂贵的)才将设计新的处理芯片,比较好的是先验商定固定的一组颜色映射(例如被实现为LUT的函数等)。最终,所有数据GT_IDR、Fi(MP_T)和Fi(MP_DL)(或其衍生物)被格式化器220格式化为一个或多个所推选的信号格式的细节,并在一些信号通信装备上向外发送。
图4示出了接收系统的一个可能的实施例,并且技术人员将理解,能够存在许多这样的系统。例如,图像解码器401能够包括在分离的单元(例如DB播放器或STB)中,它可以包括在显示器或自身的包括显示器的装置(例如,电视或移动电话(注意,尽管移动电话可以不具有HDR显示器,但是移动电话可能仍然需要读取HDR编码,并从中提取Im_LDR分级))、计算机等等中。可以存在也包括编码器的专业系统,例如内容提供商前提下的代码转换器,其例如根据本原理从HDR编码的第一变形创建第二变形中的图像编码,以例如沿着付费电视系统等分布。
图像解码器401包括图像导出单元403,所述图像导出单元403被布置成对全部所要求的图像进行构造。例如,它可以提取颜色映射数据Fi(MP_DL)并对GT_IDR进行MPEG_HEVC解码。然后它应用颜色映射以导出REC_LDR。在该实施例中,我们还具有系统配置单元402,所述系统配置单元402可以被布置成例如检查当前连接的是什么种类的显示器,或者什么种类的存储设备需要具体形式的重构图像(例如,REC_HDR或内插的分级REC_MDR等),并且它可以适当地控制图像导出单元403以进行所要求的处理。在该示例中,我们可以在像例如HDMI接口连接这样的有线网络连接410上向具有2D LED背光(或OLED等)411的电视发送数据(无论是针对所连接的显示器的已经优化的,例如HDR图像,和/或像例如颜色映射数据这样的中介数据,其将允许电视对接收到的HDR图像进行进一步的微调)。能够以若干方式做出高动态范围显示器。例如,人们可以在LC材料结构之间交织小室,其中所述LC材料结构在RGB下阻挡大量光,所述小室在被驱动成完全打开的情况下透射大部分光。或者人们可以例如在投影仪中具有激光LED发光显示器,其中人们可以在突然需要过度明亮度的情况下局部地将更多LED投影到DMD IC区域,或者在电影院中人们可以具有额外的投影仪结构以创建高光等。或者我们能够经由天线415向像例如平板显示器等这样的LDR显示器416无线地发送数据。我们还象征性地示出由格式化器407提供的另一分级图像信号,例如对于例如1800 nit peak_white的显示器而言最优的中等动态范围图像,并且其被发送至这样的显示器,或者被发送至存储存储器以供稍后使用,或者经由网络被发送至用户的另一地方、他处于外面世界中某处的移动电话、或者他的朋友之一等等。
图5示出了在摄像机501内部我们的组件知道的,所述摄像机501通过透镜502从图像传感器504得到RAW图像。知识引擎520可以按照各种方式被配置成通过研究所捕获的RAW画面来获得结构、统计和/或语义知识,并引导如以上例证说明的通过颜色映射导出单元214的技术映射导出。摄像机可以具有其自己的(例如与显示装置相连或在显示装置远程处,以便导演和/或DOP跟随捕获,并经由通信天线580来掌控)用户接口550,以便影响技术映射算法,例如,如同改变某一亮度间隔的局部对比度。可以使用向GT_IDR的映射以具有快速预览图像,其中然后HDR图像编码被发送,例如以用于最终或中介记录(在一些情况下,所掌控的摄像机可能已经进行充分的LDR容器分级,即编码 M_HDR和Im_LDR,但是在其他情况下第一HDR编码形成进一步微调分级的基础)。这种示范性摄像机可以例如经由卫星通信天线599或可替换的通信装置向接收侧广播。
利用图11,我们给出能够如何在3(或N)维颜色空间中实现各种映射方法的几个示例。图11示意性地示出了HDR基准显示器(对于M_HDR分级)和LDR基准显示器(对于例如GT_IDR或Im_LDR)的色域,在切片中亮度在y轴上,并且色彩坐标之一,即饱和度S,在x轴上(这些可以例如像在CIE定义中那样进行限定,并且再次地若干选项是可能的,例如 CIE_Lab空间等)。我们示出了M_HDR中限定的颜色,即Col_HDR,如何映射到其与颜色Col_LDR相对应的LDR容器。图11a中上部是遵从如在(尚未公开的)EP12187572 (PCT/EP2013/069203)中描述的颜色映射算法的色域形状。原理是,我们首先限定用于例如沿着中性轴变换亮度的函数。然后对于具有色彩坐标(例如色相h和饱和度S)的每个颜色,我们针对该色彩颜色采取最大可能亮度Lmax(h, S),并以该值来缩放亮度映射函数。这确保对于所有HDR颜色的LDR色域内的值。图11b示出了颜色映射的另一可能类别。这里我们只是对Col_HDR应用任何变换,所以它可能结束于Col_LDR1,在LDR色域之外。然后典型地我们遵循色域映射算法,所述色域映射算法通过例如在LDR色域内去饱和而将颜色带到Col_LDR2上。取代两步投影,我们还能够针对每个亮度确定哪个是最差情形,即哪个像素将与LDR色域的该亮度的最大饱和度最远。我们能够从中导出去饱和函数DESATPR,并考虑到这种去饱和来重新映射所有颜色。还存在其他方式来确定去饱和算法。第三类颜色映射将致力于RGB空间,并且然后对那些应用映射函数意味着颜色也保持在这两个色域中。任何函数都能够用于操纵颜色,例如,仅沿着期望的luma轴的那些区域,饱和度-相关的局部函数重新映射,最后尤其在技术分级中实际值不太重要,只要对于要使用的分级而言能够通过适当的另外映射策略从中导出合理的颜色即可。
我们现在将进一步详述HDR框架中有用的饱和度映射,这能够与本申请中的其他教导分离地看待。从人类锥状体响应导出明亮度和光亮度,所述人类锥状体响应具有锥状体-视蛋白分子的激活状态,并且示出有多少光来自于作为对象反射特性及其照明二者的函数的各种颜色(明亮度是通过大脑分析来自几何扩展的复杂场景图像的所有空间锥状体信号而与基准白色相比的灰色估计)。色相是不同锥状体的谱激活比例(每个单色或多色激活)的函数,并且能够从这些锥状体激活的差异估计。它服务于主导颜色的确定,例如各种分子的宽带本质允许识别具体化学成分,例如,像苹果的红色成熟度一样。在缓慢改变下相对容易估计像太阳+天窗这样的照明体,各种可区分的色相能够很好地服务于许多视觉任务。饱和度或纯度是对于以下的度量:与中性(灰色)刺激相比,如何激励视觉系统的神经节细胞和其他部分的颜色通道。即,它是添加到中性色的纯色(例如窄带谱颜色)的量,或反之亦然。随着色度在颜色空间中在圆圈上拓扑地排序,需要作为饱和度的径向维度。画家使用通过将白色添加到像红色这样的纯色的原理,从而生成一系列浅色。本质上,饱和度由两个重要原理来确定。第一,在镜面/光泽媒介中,从更深的相互作用将白色照明体极力添加到对象颜色的光,从而引起强去饱和,但是非镜面方向上的高饱和度。更重要地,饱和度与颜料的量有关,并且这可以例如被动物用来判断潜在配偶的健康。饱和度以两种“变形”存在。第一,存在明亮度相关变形,其可以用彩度或色度建模,因为较明亮的颜色看上去更饱和。这可以在锥形颜色空间中建模,其中颜色平面(例如,uv)沿着明亮度轴而逐渐更宽。人类大脑能够再次使照明打折扣并判断对象本身有多么饱和,其中单色反射是理论上最饱和的情形。这可以在圆柱形空间中建模,其中颜色平面形状沿着明亮度轴保持相同。
物理上,这样的椎体或圆柱体可以向无限大扩展,因为人们能够做出甚至更明亮的颜色,但是技术上这几乎没有意义,因为任何实际的记录或再现系统都具有限制。在某一调节状态下(使一定量的锥状体-视蛋白在锥状体中准备好,并且中介分子处于倍增任何锥状体-激活感觉的状态,直到最终获得沿着神经元的一定量脉冲的“数字”信号)眼睛的锥状体将已经在某一时刻漂白,使得如此多的锥状体-视蛋白分子已经被激活以至于准确的颜色检测有时不再是可能的,这出现在人们看着明亮的照明器时。关于例如(比如说滑动)照片记录发生类似的事情。在某一时刻,必须记录某种最大白色(并且稍后再现),并且在这以上的场景对象亮度将剪裁为peak-white。对于任何添加的RGB空间同样如此,无论其只是可以与基准监视器有关以使它绝对的编码空间,还是用于实际显示器的实际驱动信号空间。这样的空间能够拓扑地等同于双锥形空间。例如,画家知道这一点,因为他们能够通过向纯色添加黑色来以减弱的色度但是相同的饱和度制造阴影,并在上部锥状体的顶部制造朝向纯色的浅色。即,在这样的空间的顶部仅能够存在不饱和的(0色度)颜色,关于本质上可以存在的其他颜色,例如,像例如更高动态范围显示器的更宽色域中的那些,这是不方便的。例如,对于已按照明亮度方式向下减弱到LDR(较低动态范围)但仍然处于上部锥状体中的颜色要如何处理 我们是极大地改变其饱和度,还是可以进一步向下减弱
我们是极大地改变其饱和度,还是可以进一步向下减弱 以及如果该颜色只是在用于仍然再次提升映射到更大空间的中介空间中会怎样
以及如果该颜色只是在用于仍然再次提升映射到更大空间的中介空间中会怎样
所以对于这样的情形,除了任何颜色的理论饱和度以外,人们还可能需要看可允许颜色的任何有限空间中的饱和度和饱和度修改。在这样的空间(典型地圆柱体化的)内具有任何数学变换,尤其是人们在至少能够被极大地控制的空间(例如,诸如LDR RGB空间上的缩放的[0,1] HDR RGB空间)之间映射的情况下是有用的,与向外进行并且仍然需要被译成可实现的颜色的变换相比,具有得出已有颜色的优点,但是数学的非线性本质可能扭曲像光亮度或色相这样的其他外观相关。如果我们可以以任何形状在3D中设计起始和结束色域/空间,则原理上我们不需要对此担心太多,因为我们能够设计任何映射策略。
我们能够通过以下方式操纵许多这些复杂性:使颜色分级者进行期望的变换,假定他能够指定极小的一组数学饱和度确定函数(尽管典型地简单,还考虑到这些变换典型地指示对于充分忠实或与盲目呈现相比至少有所改进所需要的映射,针对各种显示器,即那些显示器或所连接的视频处理盒中的硬件IC或软件,依赖于对应颜色而确定呈现情形应当优选地仅使用简单的数学函数,其中由分级者通过对所有可能的有关颜色呈现情境采样来操纵复杂度,所述分级者限定几个重要的分级情形,在所述重要的分级情形之间然后能够内插其他介于之间的呈现情形)。
已知不同动态范围之间的映射能够引起颜色要么柔和要么卡通地饱和,并且该情形能够是复杂的,一些分级者潜在地具有严格的期望(例如,人们可能对于面部严格,但是对于水中的蓝色或甚至乌云的颜色样子也严格)。
我们的新颖的饱和处理不仅能够用在技术分级上,实际上还能够用在任何分级图像上(例如,HDR主管或LDR分级;为了获得不同或类似动态范围的任何其他图像分级;即,在呈现于例如HDR 2000nit显示器上时看上去最优),并且甚至用在原始摄像机捕获上,无论被引入比如分级计算机这样的另一设施还是甚至仍然在摄像机中。为了在原理上描述该处理,我们不需要输入颜色空间(其可以与输出空间或任何其他的例如更大的空间相同),所以我们将以任何颜色编码的输出空间来描述它(无论是作为中介还是设备相关的直接可用于呈现的)。我们将以圆柱型Luv空间来描述该原理,即该圆柱型Luv空间的平面方向,我们仅示出u(红色-绿色)轴,在图15a中沿着归一化亮度轴L形成相同尺寸的三角形,直到帐篷(tent)开始收缩到白色。当然能够类似地实现其他可能性,并且取代物理亮度,我们可以使用像例如光亮度这样的更具心理学的量作为第三轴。所有实际可实现的颜色的色域是1501。现在人们能够应用在增大或减小饱和度的方向上移动颜色的数学变换(在色域内或色域外),这由曲线1503表示。尽管这图示了数学原理,然而图15a典型地也可以是颜色分级者在他的子窗口之一中看到的用户接口视图,当然主窗口示出了变换对要分级或重新分级的图像的颜色外观影响。原理上,我们可以针对饱和度使用任何数学计算,但是优选地其将是极大地去耦合坐标的函数,即对饱和度影响最大,而对色相或亮度或光亮度没有影响或改变很小。在实践中(尽管当然空间仅仅是实际颜色外观的简单化模型,但是最后仍然可能存在对颜色的非饱和方面的一些可见侧影响),数学计算可以是正交数学计算,所以尽管我们以略微弯曲的饱和度改变曲线(即,在饱和它们时还稍微点亮这些颜色)示出了一般变形,但是这常常只是与L轴正交的平面中的线。为了对为图像给出总样子的对象或区域的饱和度具有容易但有力的控制,分级者现在有可能不仅限定全局饱和度乘法器,还限定依赖于要处理的颜色的亮度的乘法器。该函数a_s=f(L)可以被记录为参数函数或查找表。限定要选择哪些函数以用于处理的相关亮度Li由曲线1503上的色彩颜色来确定。现在唯一需要的就是某一基准饱和度等级S_ref(1502),其可以等同于归一化值1。在该示范性实施例中,我们假定饱和度被限定为欧几里得长度,即sqrt(u*u+v*v),并且例如在Lab空间中它将是sqrt(a*a+b*b),但是当然其他限定将是可能的。对于该基准等级的实际挑选将是:将它放在限定颜色空间的三个(R,G,B)中最饱和的或更主要的(u,v)位置。现在,限定饱和度曲线a_s=f(L)的快速并且简单并且通常充分精确的方式将是:分级者针对亮度轴上的多个亮度(级别1504等)确定采样点。他用圆点1505标记这些。这些圆点的位置确定饱和度以及它是提升还是减小。将圆点1505到L轴的欧几里得距离与基准圆筒的距离S_ref相比较,并且如果它例如为0.3而S_ref=1,则这意味着具有该亮度的所有颜色都应通过将它们的饱和度乘以0.3来减弱(注意,对于饱和度处理来说乘法运算应当足够,尽管其他函数也当然可以类似地使用)。在较黑暗的区域中,圆点1513指定对于那些红色的饱和度提升。
所以说,例如——然而例如通过从HDR主管向下映射而生成输入图像——分级者认为较亮的颜色具有充分质量,但较暗的颜色可以进行饱和度提升,他可以确定亮度等级(例如0.25)并针对该位置在比如说1.8上指定圆点。为了节省时间,算法将确定跨越整个0.0-1.0亮度范围的完整曲线,由此例如线性内插可以应用该1.8向下到黑色,并对L-0.25等级以上的颜色应用1.0乘法器(当然其他内插策略可以由软件使用,例如,像样条函数一样,并且如果分级者想要进一步微调颜色样子,则他可以添加另外的圆点)。尽管并非必要,但是如果分级者还看到图像1506中实际出现的颜色的体积,则这可以有利的。在图1506中,我们已经仅示出在饱和度处理之前的初始情形,但是典型地最终情形(或连续改变的体积)也会被示出,其除了看实际被处理的(中介的或输出的)图像之外还为分级者给出以下构思:在哪里颜色移近色域边界并且剪裁或软剪裁可能出现(可以存在内置策略以在从色域边界开始的某一区域内时非线性地改变乘法器;并且限定选项的这样的行为将典型地在软件中由分级者在开始他的分级之前开启或关闭)。尽管这样的仅亮度相关对于许多情形来说都将是足够的,并且如果分级者能够针对不同色相限定不同行为则可以是有利的。例如,他可以针对4个色相扇区指定4个LUT。如以上说明的,相同的饱和度提升或减弱从L轴应用到红色和绿色方向,但是如看到的,颜色1506的体积可以在绿色方向上比在红色方向上更靠近色域边界,例如由于电影的当前镜头或当前静止画面是例如森林场景的(并且在先前的分级中饱和度可能已被设置为高的以在LDR编码中仿真阳光明媚的样子)。然后分级者可以将色相的扇区定界,并如上所述以类似的方式指定饱和度处理。还给出更复杂的示例,其中单一乘法行为对于图像中的至少一个亮度等级(并且可能是色相扇区)来说并不足够。例如,可以提升黑暗的红色以使立于图像的较黑暗部分(比如说车库)中的法拉利看上去更好,但是当这些颜色也出现在面部中时,那些面部可能变得过于泛红。对此,分级者能够限定第二饱和度基准S_ref2(1510),其现在将典型地还会兼扮颜色区域定界的作用,所述颜色区域定界确定哪些“面部”颜色将被处理。与该等级相比,五边形1511现在示出那里的饱和度应当被减弱例如0.75。图15b则示出这样的行为然后将如何修改类似于与五边形1511相对应的L等级的那个的亮度的颜色的饱和度。在若干情形下,间断的行为可以就足够,因为面部可以占据颜色空间的一部分,并且然后可以不存在高达法拉利那样的其他颜色,但是平滑过渡1520也可以由软件自动应用,或者在这样的曲线图中由分级者在子窗口中微调。此外,在其他方向上,至少亮度以及如果需要的话还有色度,分级者能够确定应当在哪个范围应用这种行为,例如上部亮度等级1512(并且类似地可以指定下部亮度等级)。在该范围之外,饱和度处理能够间断地切换到其他指定的行为,或者必要时这可以是更渐进式的。
尽管这样的处理可以在原理上被施加到任何图像的饱和度处理的任何情形,然而当在用于呈现具有不同动态范围的场景的分级之间改变时,这是特别有用的(即例如确定适合基于LDR编码在昏暗观看环境中驱动 4000 nit HDR显示器的最优分级的编码,或反之亦然)。然后可以将HDR空间归一化到相同的[0.0, 1.0]范围以作为LDR空间,尽管这不是必须的。如果这是在可调谐性情境下进行(其中分级被限定为能够在各种呈现情境下实现良好质量呈现,典型地显示器peak_white和环境,在那里这些分级实际构成对于在各种情形下场景应当看上去如何的内容创建器批准采样,从而避免复杂的颜色外观建模问题并将它转换成代表性分级之间的简单内插),则处理将典型地对于任何呈现系统作为元数据被联合编码成输入图像的编码,以合适地应用它(例如,如果电视具有介于两个分级之间的明亮度,例如原始为LDR 100或500 nit分级,并且饱和度处理是获得4000 nit分级的映射策略的一部分,则2000 nit显示器可以决定进行例如所推荐的提升量的一半,或确定从联合编码的饱和度行为信息开始的非线性策略)。
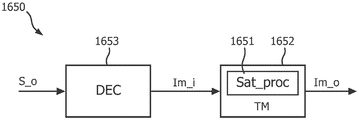
图16示出了分级装置1600的示范性实施例,所述分级装置1600被布置成能够对输入图像Im_i应用饱和度处理(比方说,需要针对1200 nit显示器被转换成中等动态范围MDR图像的LDR分级;分级者(至少)连接这样的1200 nit显示器1602以看他的指定的结果),并且还有对视频信号S_o中的指定的编码,其典型地根据像MPEG标准这样的标准,以及例如在信号的部分或分离的传送分组中作为其元数据的饱和度处理函数而对视频像素编码,其可以通过像PMT和展示时间这样的手段或其他手段而与视频相关联以限定与该处理相对应的视频中的具体图像数(例如,在下一饱和度处理函数数据的展现时间之前的所有图像)。分级装置至少包括饱和度处理单元1601,所述饱和度处理单元1601被布置成根据以上阐明的方法中的任何方法对输入图像应用饱和度改变。作为输出,它能够给出输出图像Im_o(例如具有提升的饱和度),但是还有处理函数的编码P_s,例如,诸如LUT a=ai(Li)。编码器1610将根据商定的(当前或未来的)标准化视频信号编码的要求来将其格式化。如果存在图像分析单元1603,则可以有利于促使用户交互。该单元将至少看对于如何编码图像的限定,例如以确定色域1501的R、G和B三角点,但是它也可以生成例如体积1506。用户交互单元1605实现(典型地在软件中)允许用户指定饱和度修改行为以及一般地与图像交互(例如,针对具体处理限定色域边界)的所有功能。所以它将基于用户输入usr_inp(例如,来自键盘或特殊分级键盘)而允许放置例如指示饱和度提升或减弱的量的圆点。
任何接收装置,例如视频处理装置1605,可以接收这样的编码信号S_o并直接应用所指定的饱和度处理或基于此而导出其自身的最优饱和度处理。视频处理装置至少包括饱和度处理单元1651,所述饱和度处理单元1651被布置成如上所说对输入图像Im_i应用这样的亮度相关饱和度策略。该输入图像可以以各种方式获得,但是典型地视频处理装置1650可以包括解码器1653,所述解码器1653被布置成例如进行AVC或HEVC视频解码以获得像素化颜色图像Im_i,以及对饱和度处理函数的元数据解码,从而将它转换成内部可使用的格式(例如,该信息可以以各种方式编码,如运行长度编码,或者解码器可能想要将指定转换成不同精度的另一个指定,等等)。通常,饱和度处理将会形成由颜色处理单元1652实施的一般颜色处理/映射的一部分,颜色处理单元1652还可以将Im_1的颜色的亮度映射到新的值(例如,如果输入图像是在[0.0-1.0]上编码的HDR图像,则较黑暗的部分可能过于黑暗以至于不能用于LDR呈现,并且可能需要在饱和度处理之前(优选地)或之后被变亮)。视频处理装置1650将输出图像Im_o输出,所述输出图像Im_o可以例如直接适合在具体显示器上(当然可以存在另外的转换,比如以便考虑到像显示器的内部EOTF这样的显示器方面,但是这对于本讨论来说是不重要的),或者Im_o可以被输出用于其他用途,例如存储在像蓝光光盘这样的存储器上或视频服务器上等等。这样的视频处理装置1650可以例如并入电视、计算机、或机顶盒、或像例如用在影院中的数字影院视频操纵器这样的专业装置、或图像分析部门的计算机系统等等。
为了进一步阐明,我们在图17中给出在可调谐性情境下的可能使用的两个示例。在图17a中,我们想要根据分级者的准则,如良好的局部对比度、光源或明亮区块的模拟外观等等,从HDR主分级导出LDR颜色。对于亮度方向上的色调映射,我们假定我们使用色度(u,v)保留映射,但是我们不想像EP12187572中那样将所有都缩放到输出色域的最大值。这使得一些颜色有风险落在输出色域G_LDR之外,即使我们使所有亮度都在以L_LDRm为顶的范围内。分级者能够通过在亮度向下映射之前在HDR输入颜色空间中进行饱和度降低对于明亮度对饱和度的艺术最优平衡来解决该技术问题(箭头1701)。图17b给出另一示例,这次用中介编码。我们看到的是,以类似地归一化的从而并置的方式限定输入和输出空间(以及色域)。我们具有对HDR图像(即,具有足够亮度信息以便可用于HDR呈现的图像)的中介图像编码,然而其在某种程度上已经编码(调谐)为在较低动态范围显示器上仍然也可以合理地呈现(直接地或通过典型地由例如显示器内部的显示器侧颜色映射单元实现的某种最终优化颜色映射)。这意味着例如已经用亮度映射箭头TM_L2H起始处的亮度值编码明亮的室外区域。权衡是,在这些图像区域及其颜色中给出一些明亮度反冲(在例如直接用在较低动态范围呈现中时),然后由于色域的数学形状而导致需要降低饱和度。对于HDR呈现,人们希望这些区域明亮,但不靠近色域的最大值,因为那些亮度是针对照明器和曝光所保留的,即在归一化的HDR输出色域G_HDR中,人们需要变换为它们给出较低亮度(在亮度区域L_os中)的颜色)。现在这些颜色看上去比它们本来应当(可以)的样子更苍白,所以分级者将联合指定饱和度提升以获得最终呈现,但是对于那些亮度(至少),因为颜色空间的其他区域可以是好的。
典型地,以上将被实现为一种图像颜色分级装置(1600)的各种实施例,所述图像颜色分级装置(1600)包括:
- 用于颜色输入图像(Im_i)的输入(240);以及
- 用户交互单元(1605),其被布置成允许颜色分级者指定饱和度处理策略,所述饱和度处理策略至少包括针对要处理的颜色的第一亮度范围的第一饱和度改变因子以及针对要处理的颜色的第二亮度范围的不同的第二饱和度改变因子,所述第一饱和度改变因子和第二饱和度改变因子优选地是倍数。
对于针对亮度相关饱和度改变的至少一个因子的表征可以是各种各样的,例如系数可以指定沿着至少一个恒定的(或近似恒定的)亮度线的抛物线或S形饱和度改变行为(例如,像图15b中那样在曲线中的反S形行为可以起始于小的饱和度减弱,并然后S形成长到针对更高值的大提升,直到某一最大值,它将开始剪裁输入图像中大量的高度饱和颜色,但是当然另外的参数可以针对该亮度等级被编码,以在那些区域中再次将饱和度提升降低到1.0或甚至更低,从而使那些颜色更好地适合于可用的色域),但是在许多情形下将输入饱和度s_in改变成输出饱和度s_out=a*s_in的乘法因子将会具有足够的控制复杂度和视觉精度。
尽管一些实施例可以仅针对亮度中的一个或小的区域指定饱和度处理表征因子(其余颜色例如默认为保持相同,这将等同于乘以因子1.0),然而可以有利的是,针对输入图像中的颜色的整个可能亮度范围(例如0.0-1.0)或某一其他亮度范围来指定因子,所述整个可能亮度范围或某一其他亮度范围的一些颜色可以具有限定的饱和度处理,即使它们不出现在输入图像中。这能够通过实际指定它们来进行(例如,算法创建连续内插,并且分级者接受或校正它),这可以被联合编码在图像信号S_o中以作为例如具有足够精度的LUT(其在接收机侧仍可以被进一步内插),但是如果针对具有亮度Li的每个可能颜色所要求的处理是可导出的,则这是足够的,即指定针对接收机的饱和度处理策略的元数据可以只包括功能参数或像1505那样的圆点位置等等。
如果要求更高的精度,则可以有利的是该用户交互单元(1605)允许基于例如像色相依赖性这样的颜色空间中的颜色的另外性质来指定饱和度处理,例如,如同s_out=fi(L,h_i),其中有一组h_i’s是色相扇区的质心色相,并且基于与所有那些质心色相最近的接近度而通过饱和度映射来处理颜色(u,v),或另一色相相关限定s_out=fi(L, f_hi()),其中f_hi()是将输入颜色的色相映射到限定具体饱和度处理策略的某一系数i的某种函数或算法策略。类似地,可以存在针对至少一个亮度范围(在Li处或在Li周围)的不同饱和度子范围的各种策略,并且人们可以将补色相看做如同它们是负的饱和度那样。这可以在数学上被限定为例如s_out=fi(L, f_si()),其中现在存在基于要处理的输入图像的颜色(u,v)的饱和度的类(例如,如果牵涉到两个区域,则是布尔型)分配。尽管该精度通常将是足够的,然而人们通常可以限定基于所选择的亮度子范围中的颜色的色相和饱和度两者而不同的策略。
所以我们描述了一种针对输入图像(Im_i)指定饱和度处理策略的方法,包括:至少指定针对要处理的输入图像的颜色的第一亮度范围的第一饱和度改变因子以及针对要处理的输入图像的其他颜色的第二亮度范围的不同的第二饱和度改变因子,并且优选地包括将该策略编码成与所述输入图像相关联的元数据,以及其变形。
对此的互补装置将是一种视频处理装置(1650),包括:
- 用于输入图像(Im_i)的输入;以及
- 饱和度处理单元(1651),其被布置成对落入第一亮度范围的输入图像的颜色应用第一饱和度改变,并且对落入第二亮度范围的输入图像的颜色应用不同的第二饱和度改变,所述视频处理装置包括用于获得分别表征第一饱和度改变和第二饱和度改变的第一饱和度改变因子和第二饱和度改变因子的装备,其中该装备优选地包括用于从图像信号(S_o)中的元数据解码第一饱和度改变因子和第二饱和度改变因子的解码器。尽管该装置可以是处于单一位置或单一使用中的系统的一部分,但是典型地针对已有内容的分级者或重新分级者将指定分级一次,并且然后在稍后并且不同的时机,这些分级的使用将通过视频处理装置而发生。这可以例如典型地是消费者装置。消费者可能已经在互联网上购买电影,他在例如5年前在他的LDR显示器上看过该电影。现在,仍然具有观看内容的权利,他向服务器上的管理模块指示他已经购买HDR显示器并且他期望接收针对视频节目的图像的元数据,从而指定该饱和度以及其他。当然用户还可以购买单一存储器产品上的视频编码(像素化图像颜色)+颜色(饱和度)处理元数据,所述存储器产品诸如是例如蓝光光盘、固态存储棒、或预先安装在例如像便携式播放器等这样的视频播放器设备上。
这对应于一种视频处理方法以及根据以上说明的阐明原理的其各种实施例,所述方法包括:对落入第一亮度范围的输入图像的颜色应用第一饱和度改变,并且对落入第二亮度范围的输入图像的颜色应用不同的第二饱和度改变。
图13示出了能够如何获得不同的LDR图像以用于呈现的示例。在该示例中,我们已经针对技术分级挑选平滑曲线1301,其允许要成为已编码的主HDR图像的原始的所有亮度范围(无论可能具有什么样的范围)恢复到合理的精度。当我们在技术分级的LDR图像GT_IDR中省掉这一点时,尽管画面将是可辨别的,然而“哑”传统系统将在LDR显示器上呈现某种程度上枯燥的画面,其中在像演员这样的主要区域中具有不优选的对比度。任何这样的系统可以使用自动处理来提高对比度或以别的方式尝试优化画面,但是将会需要盲目地这么做。如果内容提供商能够编码接收侧所做的以做出比技术分级更好的LDR分级,则这将会好得多。指定从技术分级GT_IDR的这样的第二色调映射所要求的数据能够如同指定两个边界gt_Mh和gt_Ml那样简单,所述两个边界gt_Mh和gt_Ml指示主要信息位于代码空间中的哪里,以及哪些其他颜色可以以其他为代价而(严重)劣化。接收侧系统则仅需要在考虑这些重要值的情况下拉伸luma。我们已经在曲线图1302中示出这一点,其在直接应用到显示器(具有已知的校准性质,例如标准伽马和观看环境行为)时将根据该曲线图而在x-as上导致所呈现的亮度。在该示例中,接收端颜色映射器已经决定主要拉伸黑色,从而仍然保有HDR的少量多色调分色信息,然而这可以在给定的周围环境下呈现,并且已经决定使用硬剪裁策略,从而将gt_Mh映射到白色(即,将它限定为总HDR颜色空间中的LDR白色)。以上所有颜色然后能够不被呈现在该例如700 nit显示器上。当然,可以关于接收侧颜色映射应当对接收到的GT_IDR编码图像做什么来联合编码更复杂的指定,以在一个或多个预期显示器上获得最优样子(例如,700 nit进行处理X,1500 nit进行Y),并且这可以全部限定在颜色映射函数中并且基于接收到的GT_IDR图像而应用(例如,另外的特性灰色值能够有助于帮助对于要获得的LDR分级的进一步参数上指定的改进,或者可以针对每个接收显示器类的整个范围指定1个明确的映射策略,并且这能够例如针对亮度值以提升因子[在1/X和Y之间]的LUT来进行)。所以简单的解码系统将呈现合理的LDR画面,并且能够操纵所有当前可能性的解码器将得出最优的LDR或HDR或任何MDR(中等动态范围)或ODR(外部典型动态范围,如具有特别低对比度的subLDR)图像。尽管我们的框架允许针对N个LDR(和其他)观看情境(例如,在黑暗和昏暗和明亮观看情境下的100 nit和500 nit tv =6个分级)指定确切的分级,但是当然并不总是必须呈现最优的分级,而是良好质量的图像在一些情境中也将适用。我们作为唯一示例参考图3说明这一点。假如我们具有新的阵容,其具有应该看上去非常好的HDR灯光,但是作为近似的LDR应当只是看上去好,并且分级者应当能够在开始摄影棚新演出之前在几秒钟内限定他的系统。对此,人们可以限定两个额外的定界阈值gt_H2和gt_L2,使得接收端能够决定如何颜色映射GT_IDR以获得其显示器驱动图像。例如,可以限定(通过在像MINIMAL_LDR_Low和MINIMAL_LDR_High、或者 BROAD_LDR_Low和BROAD_LDR_High这样的特殊保留代码或者甚至更多LDR子范围分隔符中联合编码这些值)gt_ML和gt_Mh是HDR场景的主要动作LDR子范围的“最终”分隔符,其仍然包含一些HDR信息(如摄影棚中已经的一些较明亮的部分),并且gt_L2和gt_L2包含LDR呈现所要求的“绝对最小值”(例如,面部中没有高光的(严重)剪裁)。然后接收端颜色映射能够选择其策略以做出LDR图像。例如,它可以在已经针对gt_L2和gt_H2之间绝对必要的良好呈现的颜色的中间范围指定拉伸策略(例如,将这些映射到值20和220)之后,向gt_ML和gt_L2与gt_H2和gt_H2之间的区域限定专有软剪裁策略。但是如果接收系统决定进行将[gt_L2, gt_H2]范围映射到[0,255]并在外部剪裁的硬拉伸,则LDR呈现也将会看上去合理。接收端可以决定例如基于可用周围灯光的量来挑选选项。所以我们看到,系统留下很多可能性,从严苛控制的复杂分级限定系统,到仅具有几个联合编码的引导参数的相当简单的系统。技术分级的动态范围样子能够例如是LDR或MDR(即,在例如1200 nit的基准显示器上看上去良好)。但是该原理总是从艺术自由度中去耦合技术要求(比如可逆性,其在HDR-GT_IDR关系中操纵)(只要分级者期望就从GT-IDR做出所有LDR图像对象的任意重新上色,并且如映射函数所需要的那样复杂,尽管典型地具有多个所支持的基础函数(解码器需要支持它),例如,如同多子函数luma和颜色映射(例如具有LUT)、局部对象段和因此映射函数的限定等等)。用户接口可以对于分级者来说非常简单,例如对于许多系统,gt_Mh、gt_H2等的精确微调位置可以不严格,他可以通过快速向场景的当前捕获图像的几个区域涂鸦来限定它们,例如,如同新闻广播员的面部、她坐在其后面的办公桌、以及如果要求用另一只笔的话(限定外部区域,如同gt_Mh以上明亮),在她后背后面的发亮屏幕。当然能够输入更多信息——例如以更多的gt特性点——例如,如同她面部或桌子的HDR灯光中的阴影或高光,并且这可以全部用于更复杂的颜色映射策略。并且可以进行这些区域的进一步指定,例如跨越她面部限定对比度轨迹的几何函数,以及用于在各种条件下重新限定/重新映射那些(例如,留下曲线的明亮端,但是使黑暗变亮一点)的函数等等。如果要求的话,所有这些能够被添加到元数据,但是通常人们将偏爱简单的系统,其具有所要求的最小量数据,并且至少一个LDR范围可以是有用的(但是在一些情境下围绕人的颜色的第二个也可以是有用的)。
图14示出了技术分级能够如何致力于比色原理的示例。假如我们具有数学颜色空间1401,其具有主色限定,使得能够以物理色域1402做出比人们对于某些(可能是未来的)设想的显示器所需要的更少的饱和颜色。对于较黑暗的颜色可能并不是这样的情况,因为显示器可以对饱和度做一些提升,并且可以存在足够的记录信息来使其良好工作(也许通过施加后条带去除滤波器,如果需要的话)。然而在色域的帐篷中,可以存在问题,并且这就是我们想要具有一些饱和高明亮度颜色而非更柔和化颜色的地方。如果这是问题,则分级者能够决定将其分级限定到高达新的白色点W*(通过将帐篷去顶,从而得到在最大程度明亮的颜色附近限定更饱和化颜色的可能性),但是然后为了避免混淆,该白色点W*(根据该代码限定,是最明亮的可能颜色)可以被联合编码(以声明它不只是“无白色”场景)。当然,接收端也可以只是考虑输入图像中最明亮的编码是什么,并且以此来进行呈现,因为视觉系统无论如何针对明亮显示器都对于灰色样子调节为如同白色一样,但是然后LDR系统可以使用它将画面的一些部分提升到它的最大明亮度。
技术人员将理解,对于以上概念,许多变形是可能的。例如尽管在具体阐明示例时在图中我们假定颜色映射的数据与图像像素数据(GT_IDR)联合编码,例如作为元数据在像例如SEI消息或类似物这样的图像编码标准中限定的分界符内,或在存储器的保留分区(例如,BD的分区)内,然而当然其他示例能够经由非GT_IDR的另一通信信道来传输颜色映射数据。例如,内容创建者能够对颜色映射或得到的GT_IDR的性质做额外的约束,例如他可以对它给出与M_HDR和Im-LDR完全完全不同的样子,或甚至丑陋的画面,并在接收方的验证或支付等之后经由安全信道供应颜色映射数据。
本文本中公开的算法组件可以(整体地或部分地)实际实现为硬件(例如,特定用途IC的部分)或实现为运行在特殊数字信号处理器或普通处理器等上的软件。它们可以是半自动的,意义在于至少某一用户输入可以存在/已经存在(例如,在工厂、消费者输入或其他人类输入中)。
技术人员从我们的展示中应理解哪些组件可以是可选的改进并且能够与其他组件相结合地实现,以及方法的(可选)步骤如何与装置的相应装备相对应,并且反之亦然。在本发明中以某种关系(例如,在单一图中在某种配置下)公开的一些组件的事实并不意味着其他配置不可能作为在如本文为了申请专利而公开的相同发明思想下的实施例。此外,出于务实的原因已经仅公开有限范围的示例的事实并不意味着其他变形不能落入权利要求的范围内。实际上,本发明的组件可以沿着任何使用链体现在不同的变形中,例如像编码器这样的创建侧的所有变形都可以类似于或对应于分解系统的消费侧的对应装置,例如解码器,并且反之亦然。实施例的若干组件可以被编码为信号中的特定信号数据,以便在编码器和解码器之间的任何传输技术等等中传输或进一步使用,比如协调。本申请中的词语“装置”是在其最宽意义上使用的,即一组装备,其允许实现具体目的,并因此能够例如是IC(的一小部分)或专用设施(比如具有显示器的设施),或联网系统的一部分等等。“布置”或“系统”也打算在最宽意义上使用,所以它可以包括单一物理可购买装置、装置的一部分、协作装置(的部分)的聚集等等以及其他。
计算机程序产品本意应当被理解为涵盖命令的聚集的物理实现,所述命令的聚集使能普通或特殊用途处理器在将命令录入处理器的一系列加载步骤(其可以包括中介转换步骤,比如译成中介语言,以及最终处理器语言)之后能够执行本发明的特性功能中的任何特性功能。具体地,计算机程序产品可以实现为例如像磁盘或磁带这样的载体上的数据、存在于存储器中的数据、经由网络连接——有线的或无线的——传播的数据、或纸上的程序代码。除程序代码之外,程序所要求的特性数据还可以体现为计算机程序产品。这样的数据可以(部分地)以任何方式供应。
本发明或根据本实施例的任何理念可使用的任何数据,如视频数据,也可以体现为数据载体上的信号,所述数据载体可以是可拆卸存储器,如光盘、闪存存储器、可拆卸硬盘、经由无线装备可写入的便携式设备等等。
任何所提出的方法的操作所要求的步骤中的一些可以已经存在于处理器或本发明的任何装置实施例的功能性中,而不是(以本发明实施例的细节)在本文描述的计算机程序产品或任何单元、装置或方法中描述,比如数据输入和输出步骤、诸如标准显示器驱动这样的典型地公知的并入处理步骤等等。我们还期望保护所得产品和类似产物,例如,像在方法的任何步骤处或在装置的任何子部分中牵涉到的特定新颖信号一样,以及这样的信号的任何新用途,或任何相关方法。
利用图像信号,我们的意思典型地是打包图像数据的现有或类似方式中的任何方式。与我们称作图像(或画面)的颜色元组(color tuplets)的像素化结构不同,这样的信号可以包含元数据,如像例如图像纵横比这样的针对数据的含义的描述符,以及包含与编码图像有关的有用信息的其他元数据,比如以便在接受侧修改它等等。信号可以具有各种物理/技术形式的实施例,例如可以被限定为载波的电调制或表示为机械坑的比特或像例如本地磁化状态这样的材料修改等等。
应注意,上述实施例说明而非限制本发明。其中技术人员能够容易地将所提出的示例的映射实现到权利要求的其他区域,为了简明起见我们没有深度提及所有这些选项。除了如在权利要求中组合的发明元素组合之外,元素的其他组合是可能的。元素的任何组合能够实现在单一专用元件中。
权利要求中在圆括号之间的任何附图标记都不打算限制权利要求,也不是附图中的任何具体符号。词语“包括”不排除权利要求中未列出的元素或方面的存在。元素前面的词语“一”或“一个”不排除多个这样的元素的存在。
Claims (8)
1.一种视频处理装置(1650),被布置成从第一动态范围的输入图像计算第二亮度动态范围的输出图像,所述计算包括改变像素的饱和度,所述装置包括:
- 用于视频信号(S_o)的输入,所述视频信号包括输入图像(Im_i)以及作为所述视频信号中的元数据的饱和度处理策略;
- 饱和度处理单元(1651),其被布置成对落入第一亮度范围中的输入图像的颜色应用第一饱和度改变并且对落入第二亮度范围中的输入图像的颜色应用不同的第二饱和度改变,所述视频处理装置包括用于获得分别表征第一饱和度改变和第二饱和度改变的第一饱和度改变因子和第二饱和度改变因子的装备,其中这个装备包括用于从所述视频信号中的饱和度处理策略元数据中解码第一饱和度改变因子和第二饱和度改变因子的解码器。
2.根据权利要求1所述的视频处理装置(1650),被布置成处理具有第一峰值白色亮度的所述输入图像,并且所述输出图像具有不同于所述第一峰值白色亮度的第二峰值白色亮度。
3.根据权利要求2所述的视频处理装置(1650),其中所述第一峰值白色亮度和所述第二峰值白色亮度中的一个具有100 nit的值,并且所述第一峰值白色亮度和所述第二峰值白色亮度中的另一个具有1000 nit或更高的值。
4.根据权利要求1、2或3所述的视频处理装置(1650),包括亮度映射处理器,以将所述输入图像的像素亮度映射至所述输出图像的像素亮度。
5.根据权利要求1所述的视频处理装置(1650),其中饱和度处理策略是由所述输入图像的创建者通过颜色分级指定的。
6.根据权利要求5所述的视频处理装置(1650),其中所述饱和度处理策略是由所述输入图像的创建者编码到所述视频信号中的。
7.根据权利要求1、2或5所述的视频处理装置(1650),其中所述元数据作为HEVC视频编码的一部分被接收。
8.一种高动态范围视频解码器,包括根据权利要求1、2或5所述的视频处理装置。
Applications Claiming Priority (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201361767314P | 2013-02-21 | 2013-02-21 | |
| US61/767314 | 2013-02-21 | ||
| US201361868111P | 2013-08-21 | 2013-08-21 | |
| US61/868111 | 2013-08-21 | ||
| CN201480009892.XA CN104995903B (zh) | 2013-02-21 | 2014-02-07 | 改进的hdr图像编码和解码方法及设备 |
| PCT/IB2014/058848 WO2014128586A1 (en) | 2013-02-21 | 2014-02-07 | Improved hdr image encoding and decoding methods and devices |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201480009892.XA Division CN104995903B (zh) | 2013-02-21 | 2014-02-07 | 改进的hdr图像编码和解码方法及设备 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN109064433A CN109064433A (zh) | 2018-12-21 |
| CN109064433B true CN109064433B (zh) | 2022-09-13 |
Family
ID=50336365
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201811139858.0A Active CN109064433B (zh) | 2013-02-21 | 2014-02-07 | 改进的hdr图像编码和解码方法及设备 |
| CN201480009892.XA Active CN104995903B (zh) | 2013-02-21 | 2014-02-07 | 改进的hdr图像编码和解码方法及设备 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201480009892.XA Active CN104995903B (zh) | 2013-02-21 | 2014-02-07 | 改进的hdr图像编码和解码方法及设备 |
Country Status (9)
| Country | Link |
|---|---|
| US (2) | US9699482B2 (zh) |
| EP (1) | EP2959672B1 (zh) |
| JP (2) | JP6309978B2 (zh) |
| CN (2) | CN109064433B (zh) |
| ES (1) | ES2770426T3 (zh) |
| MX (1) | MX350910B (zh) |
| PL (1) | PL2959672T3 (zh) |
| RU (1) | RU2633128C2 (zh) |
| WO (1) | WO2014128586A1 (zh) |
Families Citing this family (116)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| ES2770426T3 (es) * | 2013-02-21 | 2020-07-01 | Koninklijke Philips Nv | Métodos y dispositivos de codificación y decodificación de imágenes HDR mejorados |
| JP6202330B2 (ja) * | 2013-10-15 | 2017-09-27 | ソニー株式会社 | 復号装置および復号方法、並びに符号化装置および符号化方法 |
| CN105684412B (zh) * | 2013-10-22 | 2017-04-26 | 杜比实验室特许公司 | 用于扩展动态范围图像的引导颜色分级 |
| CN105379263B (zh) * | 2013-11-13 | 2017-09-22 | 杜比实验室特许公司 | 用于指导图像的显示管理的方法和设备 |
| MX367832B (es) * | 2014-01-24 | 2019-09-09 | Sony Corp | Dispositivo de transmisión, método de transmisión, dispositivo de recepción y método de recepción. |
| WO2015130796A1 (en) | 2014-02-25 | 2015-09-03 | Apple Inc. | Adaptive video processing |
| WO2015174026A1 (ja) | 2014-05-16 | 2015-11-19 | パナソニックIpマネジメント株式会社 | 変換方法および変換装置 |
| RU2667034C2 (ru) | 2014-05-28 | 2018-09-13 | Конинклейке Филипс Н.В. | Способы и устройства для кодирования hdr-изображений и способы и устройства для использования таких кодированных изображений |
| US9786251B1 (en) * | 2014-05-28 | 2017-10-10 | Musco Corporation | Apparatus, method, and system for visually indicating perceived glare thresholds |
| US9532019B2 (en) * | 2014-06-20 | 2016-12-27 | Sz Zunzheng Digital Video Co., Ltd | Color grading monitor, color grading system and color grading method thereof |
| JP5991502B2 (ja) * | 2014-06-23 | 2016-09-14 | パナソニックIpマネジメント株式会社 | 変換方法および変換装置 |
| CN105393549A (zh) * | 2014-06-27 | 2016-03-09 | 松下知识产权经营株式会社 | 数据输出装置、数据输出方法及数据生成方法 |
| JP2016058848A (ja) * | 2014-09-08 | 2016-04-21 | ソニー株式会社 | 画像処理装置及び画像処理方法 |
| JP6539032B2 (ja) * | 2014-10-06 | 2019-07-03 | キヤノン株式会社 | 表示制御装置、表示制御方法、およびプログラム |
| US20160277743A1 (en) * | 2014-10-06 | 2016-09-22 | Telefonaktiebolaget L M Ericsson (Publ) | Evaluation Measure for HDR Video Frames |
| JP6356349B2 (ja) * | 2014-10-10 | 2018-07-11 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | ダイナミックレンジマッピングのための彩度処理仕様 |
| US9369739B2 (en) * | 2014-10-28 | 2016-06-14 | Avid Technology, Inc. | Preserving dynamic range precision in integer image formats |
| US10271057B2 (en) * | 2014-11-04 | 2019-04-23 | Vahagn Nurijanyan | System and methods for image/video compression |
| US10277783B2 (en) | 2014-11-14 | 2019-04-30 | Samsung Electronics Co., Ltd. | Method and device for image display based on metadata, and recording medium therefor |
| TW201633779A (zh) | 2014-12-16 | 2016-09-16 | 湯姆生特許公司 | 將圖像之高動態範圍版本轉換至該圖像之標準動態範圍版本之方法及裝置 |
| US9697175B2 (en) * | 2014-12-22 | 2017-07-04 | Here Global B.V. | Method and apparatus for providing curvature transformation for comparison, computation and aggregation |
| CN112383695B (zh) * | 2014-12-29 | 2022-06-14 | 索尼公司 | 发送装置、接收装置和接收方法 |
| US9544560B2 (en) * | 2015-01-09 | 2017-01-10 | Vixs Systems, Inc. | Dynamic range converter with generic architecture and methods for use therewith |
| US9860504B2 (en) | 2015-01-09 | 2018-01-02 | Vixs Systems, Inc. | Color gamut mapper for dynamic range conversion and methods for use therewith |
| US9589313B2 (en) * | 2015-01-09 | 2017-03-07 | Vixs Systems, Inc. | Dynamic range converter with pipelined architecture and methods for use therewith |
| US9558538B2 (en) * | 2015-01-09 | 2017-01-31 | Vixs Systems, Inc. | Dynamic range converter with frame by frame adaptation and methods for use therewith |
| US9560330B2 (en) * | 2015-01-09 | 2017-01-31 | Vixs Systems, Inc. | Dynamic range converter with reconfigurable architecture and methods for use therewith |
| EP3251082A1 (en) | 2015-01-30 | 2017-12-06 | Koninklijke Philips N.V. | Simple but versatile dynamic range coding |
| CN107409210B (zh) | 2015-01-30 | 2021-01-12 | 交互数字Vc控股公司 | 匹配不同动态范围的彩色图片之间的色彩的方法和设备 |
| US10205854B2 (en) * | 2015-01-30 | 2019-02-12 | Canon Kabushiki Kaisha | Image processing apparatus, image processing method, and appearance reproduction apparatus |
| EP3051792A1 (en) * | 2015-01-30 | 2016-08-03 | Thomson Licensing | Method and device for matching colors between color pictures of different dynamic range |
| WO2016120209A1 (en) | 2015-01-30 | 2016-08-04 | Thomson Licensing | A method and apparatus of encoding and decoding a color picture |
| WO2016171508A1 (ko) * | 2015-04-23 | 2016-10-27 | 엘지전자 주식회사 | 방송 신호 송수신 방법 및 장치 |
| JP6731722B2 (ja) * | 2015-05-12 | 2020-07-29 | パナソニック インテレクチュアル プロパティ コーポレーション オブ アメリカPanasonic Intellectual Property Corporation of America | 表示方法および表示装置 |
| JP6663214B2 (ja) * | 2015-05-26 | 2020-03-11 | パナソニック インテレクチュアル プロパティ コーポレーション オブ アメリカPanasonic Intellectual Property Corporation of America | 表示方法および表示装置 |
| US9942489B2 (en) * | 2015-06-02 | 2018-04-10 | Samsung Electronics Co., Ltd. | Adaptive tone mapping based on local contrast |
| US10880557B2 (en) * | 2015-06-05 | 2020-12-29 | Fastvdo Llc | High dynamic range image/video coding |
| JP6574270B2 (ja) | 2015-06-05 | 2019-09-11 | アップル インコーポレイテッドApple Inc. | 高ダイナミックレンジのコンテンツのレンダリング及び表示 |
| EP3107300A1 (en) * | 2015-06-15 | 2016-12-21 | Thomson Licensing | Method and device for encoding both a high-dynamic range frame and an imposed low-dynamic range frame |
| GB2539917B (en) * | 2015-06-30 | 2021-04-07 | British Broadcasting Corp | Method and apparatus for conversion of HDR signals |
| EP3113496A1 (en) * | 2015-06-30 | 2017-01-04 | Thomson Licensing | Method and device for encoding both a hdr picture and a sdr picture obtained from said hdr picture using color mapping functions |
| JP2017024285A (ja) * | 2015-07-23 | 2017-02-02 | 株式会社Jvcケンウッド | 印刷装置,印刷システム,印刷方法,及びカードの製造方法 |
| WO2017051808A1 (ja) | 2015-09-25 | 2017-03-30 | 日立マクセル株式会社 | 放送受信装置 |
| CN108028958B (zh) | 2015-09-25 | 2021-09-03 | 麦克赛尔株式会社 | 广播接收装置 |
| JP6616212B2 (ja) * | 2015-09-28 | 2019-12-04 | マクセル株式会社 | 表示制御方法 |
| US10283032B2 (en) | 2015-10-07 | 2019-05-07 | Samsung Display Co., Ltd. | Integrated circuit for nonlinear data encoding |
| EP3169071B1 (en) * | 2015-11-16 | 2020-01-29 | InterDigital VC Holdings, Inc. | Backward-compatible encoding of a hdr picture |
| CN106878694B (zh) * | 2015-12-10 | 2018-12-18 | 瑞昱半导体股份有限公司 | 高动态范围信号处理系统与方法 |
| EP3364654B1 (en) * | 2015-12-15 | 2021-03-03 | Huawei Technologies Co., Ltd. | High dynamic range image processing method and apparatus |
| BR112017016037A2 (pt) | 2015-12-17 | 2018-03-20 | Koninklijke Philips N.V. | decodificador e codificador de vídeo em hdr; método de decodificação de vídeo; método para codificação de vídeo em hdr; e memória legível por computador |
| US9984446B2 (en) * | 2015-12-26 | 2018-05-29 | Intel Corporation | Video tone mapping for converting high dynamic range (HDR) content to standard dynamic range (SDR) content |
| JP6233424B2 (ja) * | 2016-01-05 | 2017-11-22 | ソニー株式会社 | 撮像システムおよび撮像方法 |
| JP6237797B2 (ja) * | 2016-01-05 | 2017-11-29 | ソニー株式会社 | ビデオシステム、ビデオ処理方法、プログラム、およびビデオコンバーター |
| CN108781290B (zh) * | 2016-03-07 | 2023-07-04 | 皇家飞利浦有限公司 | 一种hdr视频编码器及其编码方法、hdr视频解码器及其解码方法 |
| WO2017158463A1 (en) | 2016-03-14 | 2017-09-21 | Koninklijke Philips N.V. | Saturation processing specification for dynamic range mappings |
| BR112018068603A2 (pt) * | 2016-03-18 | 2019-02-05 | Koninklijke Philips Nv | decodificador e codificador de vídeo e método de decodificação e de codificação vídeo |
| JP6824619B2 (ja) * | 2016-03-31 | 2021-02-03 | キヤノン株式会社 | 画像処理装置、およびその制御方法 |
| US10699391B2 (en) | 2016-04-29 | 2020-06-30 | Disney Enterprises, Inc. | Dynamic range expansion highlight information restoration |
| EP3242482A1 (en) * | 2016-05-04 | 2017-11-08 | Thomson Licensing | Method and apparatus for encoding/decoding a high dynamic range picture into a coded bitstream |
| JP6891882B2 (ja) * | 2016-05-25 | 2021-06-18 | ソニーグループ株式会社 | 画像処理装置、および画像処理方法、並びにプログラム |
| US9916638B2 (en) * | 2016-07-20 | 2018-03-13 | Dolby Laboratories Licensing Corporation | Transformation of dynamic metadata to support alternate tone rendering |
| US10834400B1 (en) | 2016-08-19 | 2020-11-10 | Fastvdo Llc | Enhancements of the AV1 video codec |
| US10242435B2 (en) * | 2016-09-07 | 2019-03-26 | Gvbb Holdings S.A.R.L. | High dynamic range processing |
| KR102594201B1 (ko) * | 2016-09-22 | 2023-10-27 | 삼성디스플레이 주식회사 | 영상 처리 방법 및 이를 수행하는 표시 장치 |
| GB2554669B (en) * | 2016-09-30 | 2022-04-06 | Apical Ltd | Image processing |
| WO2018070822A1 (ko) * | 2016-10-14 | 2018-04-19 | 엘지전자 주식회사 | 적응적 영상 재생을 위한 데이터 처리 방법 및 장치 |
| US10218952B2 (en) | 2016-11-28 | 2019-02-26 | Microsoft Technology Licensing, Llc | Architecture for rendering high dynamic range video on enhanced dynamic range display devices |
| US20180152686A1 (en) * | 2016-11-28 | 2018-05-31 | Microsoft Technology Licensing, Llc | Tone mapping functions for rendering high dynamic range video on enhanced dynamic range display devices |
| US10366674B1 (en) * | 2016-12-27 | 2019-07-30 | Facebook Technologies, Llc | Display calibration in electronic displays |
| US10176561B2 (en) * | 2017-01-27 | 2019-01-08 | Microsoft Technology Licensing, Llc | Content-adaptive adjustments to tone mapping operations for high dynamic range content |
| US10104334B2 (en) | 2017-01-27 | 2018-10-16 | Microsoft Technology Licensing, Llc | Content-adaptive adjustment of display device brightness levels when rendering high dynamic range content |
| HUE050807T2 (hu) * | 2017-02-15 | 2021-01-28 | Dolby Laboratories Licensing Corp | Árnyalatgörbe-leképezés nagy dinamikus tartományú képek számára |
| JP7086587B2 (ja) * | 2017-02-24 | 2022-06-20 | インターデジタル ヴイシー ホールディングス, インコーポレイテッド | 復号された画像データから画像データを再構成する方法および装置 |
| JP6929373B2 (ja) | 2017-03-03 | 2021-09-01 | ドルビー ラボラトリーズ ライセンシング コーポレイション | 不均等な色空間における彩度調整 |
| EP3373585A1 (en) * | 2017-03-09 | 2018-09-12 | Thomson Licensing | Method for inverse tone mapping of an image with visual effects |
| CA3060578C (en) | 2017-04-21 | 2020-07-21 | Zenimax Media Inc. | Systems and methods for encoder-guided adaptive-quality rendering |
| EP3399497A1 (en) * | 2017-05-05 | 2018-11-07 | Koninklijke Philips N.V. | Optimizing decoded high dynamic range image saturation |
| CN107197235B (zh) * | 2017-06-26 | 2018-10-12 | 杭州当虹科技股份有限公司 | 一种hdr视频预处理方法 |
| CN111095931B (zh) | 2017-09-06 | 2022-05-27 | 杜比实验室特许公司 | 色调曲线优化方法以及相关联的视频编码器和视频解码器 |
| US10609372B2 (en) * | 2017-09-29 | 2020-03-31 | Dolby Laboratories Licensing Corporation | Up-conversion to content adaptive perceptual quantization video signals |
| US10497104B2 (en) * | 2017-10-24 | 2019-12-03 | Adobe Inc. | Empirical exposure normalization |
| US10498971B2 (en) | 2017-11-03 | 2019-12-03 | Qualcomm Incorporated | Systems and methods for high-dynamic range imaging |
| KR102448497B1 (ko) * | 2017-11-17 | 2022-09-28 | 삼성전자주식회사 | 디스플레이 장치, 디스플레이 장치의 제어 방법 및 영상 제공 장치 |
| US10713997B2 (en) * | 2018-03-23 | 2020-07-14 | Valve Corporation | Controlling image display via mapping of pixel values to pixels |
| EP3744095A1 (en) * | 2018-05-17 | 2020-12-02 | Google LLC | Image compression and decompression using triangulation |
| CN108933933B (zh) * | 2018-07-05 | 2019-08-20 | 华为技术有限公司 | 一种视频信号处理方法及装置 |
| FR3083633B1 (fr) * | 2018-07-05 | 2020-05-29 | Thales | Procede et dispositif d'affichage de donnees sonar ou radar a haute dynamique |
| CN108882028B (zh) * | 2018-07-05 | 2019-06-14 | 华为技术有限公司 | 视频信号的处理方法及装置 |
| US10957024B2 (en) | 2018-10-30 | 2021-03-23 | Microsoft Technology Licensing, Llc | Real time tone mapping of high dynamic range image data at time of playback on a lower dynamic range display |
| GB2575135B (en) * | 2018-12-20 | 2021-03-24 | Imagination Tech Ltd | ASTC interpolation |
| GB2575134B (en) | 2018-12-20 | 2021-03-31 | Imagination Tech Ltd | ASTC interpolation |
| JP7304153B2 (ja) * | 2018-12-27 | 2023-07-06 | Kddi株式会社 | 動画像復号装置、動画像復号方法及びプログラム |
| JP7301551B2 (ja) * | 2019-02-21 | 2023-07-03 | キヤノン株式会社 | 画像処理装置、画像処理方法、表示装置、制御方法、およびプログラム |
| CN110163816B (zh) * | 2019-04-24 | 2021-08-31 | Oppo广东移动通信有限公司 | 图像信息的处理方法、装置、存储介质及电子设备 |
| CN110162567B (zh) * | 2019-05-21 | 2020-07-31 | 山东大学 | 基于颜色表优化的二维标量场数据可视化方法及系统 |
| US11182884B2 (en) * | 2019-07-30 | 2021-11-23 | Nvidia Corporation | Enhanced high-dynamic-range imaging and tone mapping |
| US11165839B2 (en) | 2019-09-20 | 2021-11-02 | Fisher-Rosemount Systems, Inc. | Edge gateway system with data typing for secured process plant data delivery |
| US11436242B2 (en) | 2019-09-20 | 2022-09-06 | Fisher-Rosemount Systems, Inc. | Edge gateway system with contextualized process plant knowledge repository |
| US10915081B1 (en) * | 2019-09-20 | 2021-02-09 | Fisher-Rosemount Systems, Inc. | Edge gateway system for secured, exposable process plant data delivery |
| US11473971B2 (en) * | 2019-09-27 | 2022-10-18 | Apple Inc. | Ambient headroom adaptation |
| CN111161234B (zh) * | 2019-12-25 | 2023-02-28 | 北京航天控制仪器研究所 | 一种离散余弦变换测量基排序方法 |
| CN113255709A (zh) | 2020-02-11 | 2021-08-13 | 阿里巴巴集团控股有限公司 | 图像元素搭配方法及装置和模型训练方法及装置和数据处理方法 |
| CN111784598B (zh) * | 2020-06-18 | 2023-06-02 | Oppo(重庆)智能科技有限公司 | 色调映射模型的训练方法、色调映射方法及电子设备 |
| CN111882498A (zh) * | 2020-07-10 | 2020-11-03 | 网易(杭州)网络有限公司 | 图像处理方法、装置、电子设备及存储介质 |
| US11315291B1 (en) * | 2021-01-29 | 2022-04-26 | International Business Machines Corporation | Shine visualization |
| US11810274B2 (en) | 2021-03-04 | 2023-11-07 | Nvidia Corporation | Tone management using tone gain functions for high dynamic range imaging applications |
| US20220358627A1 (en) * | 2021-05-05 | 2022-11-10 | Nvidia Corporation | High dynamic range image processing with fixed calibration settings |
| CN113411533B (zh) * | 2021-06-15 | 2023-03-31 | 三星电子(中国)研发中心 | 一种高动态范围制式的转换方法和装置 |
| CN113470156A (zh) * | 2021-06-23 | 2021-10-01 | 网易(杭州)网络有限公司 | 纹理贴图的混合处理方法、装置、电子设备及存储介质 |
| CN113542744A (zh) * | 2021-07-09 | 2021-10-22 | 杭州当虹科技股份有限公司 | 基于动态hdr场景切换的编码方法 |
| CN115797152A (zh) * | 2021-09-10 | 2023-03-14 | 北京字跳网络技术有限公司 | 一种颜色映射色卡生成方法及装置 |
| US20230186612A1 (en) * | 2021-12-15 | 2023-06-15 | 7 Sensing Software | Image processing methods and systems for generating a training dataset for low-light image enhancement using machine learning models |
| CN114820373B (zh) * | 2022-04-28 | 2023-04-25 | 电子科技大学 | 基于知识启发的单张图像重构hdr方法 |
| EP4277281A1 (en) | 2022-05-12 | 2023-11-15 | Koninklijke Philips N.V. | Hdr video reconstruction by converted tone mapping |
| WO2024020356A1 (en) * | 2022-07-18 | 2024-01-25 | Dolby Laboratories Licensing Corporation | Multiple-intent composite image encoding and rendering |
| CN115828353B (zh) * | 2023-02-10 | 2023-05-23 | 武汉智图科技有限责任公司 | 一种基于制图方案集的应急地图制图方法 |
Family Cites Families (28)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1023279A (ja) * | 1996-06-28 | 1998-01-23 | Fuji Xerox Co Ltd | 画像処理装置 |
| US6864916B1 (en) * | 1999-06-04 | 2005-03-08 | The Trustees Of Columbia University In The City Of New York | Apparatus and method for high dynamic range imaging using spatially varying exposures |
| US8218625B2 (en) * | 2004-04-23 | 2012-07-10 | Dolby Laboratories Licensing Corporation | Encoding, decoding and representing high dynamic range images |
| RU2370815C2 (ru) * | 2005-08-19 | 2009-10-20 | Самсунг Электроникс Ко., Лтд. | Способ и система для выделения и классификации дефектов экспозиции цифровых изображений |
| CN100473128C (zh) * | 2006-03-17 | 2009-03-25 | 广达电脑股份有限公司 | 图像处理装置及其方法 |
| JP4860551B2 (ja) * | 2007-06-01 | 2012-01-25 | 株式会社キーエンス | 拡大観察装置、高階調画像ファイル作成方法、高階調画像ファイル作成方法、高階調画像ファイル作成プログラム及びコンピュータで読み取り可能な記録媒体 |
| US20090220151A1 (en) * | 2008-02-29 | 2009-09-03 | Himax Technologies Limited | Device for adjusting image color difference value and adjusting method thereof |
| WO2010083493A1 (en) * | 2009-01-19 | 2010-07-22 | Dolby Laboratories Licensing Corporation | Image processing and displaying methods for devices that implement color appearance models |
| EP2449526A1 (en) * | 2009-06-29 | 2012-05-09 | Thomson Licensing | Zone-based tone mapping |
| US9020257B2 (en) * | 2009-10-08 | 2015-04-28 | International Business Machines Corporation | Transforming a digital image from a low dynamic range (LDR) image to a high dynamic range (HDR) image |
| JP2011160183A (ja) * | 2010-02-01 | 2011-08-18 | Olympus Imaging Corp | 撮像装置および撮像方法 |
| US8766999B2 (en) * | 2010-05-20 | 2014-07-01 | Aptina Imaging Corporation | Systems and methods for local tone mapping of high dynamic range images |
| WO2012004709A1 (en) * | 2010-07-06 | 2012-01-12 | Koninklijke Philips Electronics N.V. | Generation of high dynamic range images from low dynamic range images |
| JP5153857B2 (ja) * | 2010-11-25 | 2013-02-27 | シャープ株式会社 | 画像処理装置、画像形成装置、画像処理方法、コンピュータプログラム及び記録媒体 |
| EP2697972B1 (en) * | 2011-04-14 | 2015-01-14 | Dolby Laboratories Licensing Corporation | Image prediction based on primary color grading model |
| TWI513327B (zh) * | 2011-04-15 | 2015-12-11 | Dolby Lab Licensing Corp | 高動態範圍影像的編碼、解碼及表示 |
| US8334911B2 (en) * | 2011-04-15 | 2012-12-18 | Dolby Laboratories Licensing Corporation | Encoding, decoding, and representing high dynamic range images |
| EP2702766B1 (en) * | 2011-04-28 | 2017-06-14 | Koninklijke Philips N.V. | Apparatuses and methods for hdr image encoding and decoding |
| US9292940B2 (en) * | 2011-04-28 | 2016-03-22 | Koninklijke Philips N.V. | Method and apparatus for generating an image coding signal |
| JP6234920B2 (ja) | 2011-05-10 | 2017-11-22 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | ハイダイナミックレンジ画像信号生成及び処理 |
| US8891863B2 (en) | 2011-06-13 | 2014-11-18 | Dolby Laboratories Licensing Corporation | High dynamic range, backwards-compatible, digital cinema |
| EP2557789B1 (en) * | 2011-08-09 | 2017-09-27 | Dolby Laboratories Licensing Corporation | Guided image up-sampling in video coding |
| RU2643485C2 (ru) | 2011-09-27 | 2018-02-01 | Конинклейке Филипс Н.В. | Устройство и способ для преобразования динамического диапазона изображений |
| US9129445B2 (en) * | 2012-03-14 | 2015-09-08 | Dolby Laboratories Licensing Corporation | Efficient tone-mapping of high-bit-depth video to low-bit-depth display |
| US9516351B2 (en) * | 2012-07-13 | 2016-12-06 | Koninklijke Philips N.V. | HDR image encoding and decoding methods and devices |
| US8965141B2 (en) * | 2012-08-17 | 2015-02-24 | Thomson Licensing | Image filtering based on structural information |
| JP5911643B2 (ja) | 2012-10-08 | 2016-04-27 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | 色制約付きの輝度変更画像処理 |
| ES2770426T3 (es) * | 2013-02-21 | 2020-07-01 | Koninklijke Philips Nv | Métodos y dispositivos de codificación y decodificación de imágenes HDR mejorados |
-
2014
- 2014-02-07 ES ES14711309T patent/ES2770426T3/es active Active
- 2014-02-07 EP EP14711309.6A patent/EP2959672B1/en active Active
- 2014-02-07 WO PCT/IB2014/058848 patent/WO2014128586A1/en active Application Filing
- 2014-02-07 CN CN201811139858.0A patent/CN109064433B/zh active Active
- 2014-02-07 RU RU2015139690A patent/RU2633128C2/ru active
- 2014-02-07 JP JP2015558571A patent/JP6309978B2/ja active Active
- 2014-02-07 MX MX2015010673A patent/MX350910B/es active IP Right Grant
- 2014-02-07 US US14/762,821 patent/US9699482B2/en active Active
- 2014-02-07 CN CN201480009892.XA patent/CN104995903B/zh active Active
- 2014-02-07 PL PL14711309T patent/PL2959672T3/pl unknown
-
2017
- 2017-06-07 US US15/616,528 patent/US10182247B2/en active Active
-
2018
- 2018-01-19 JP JP2018007059A patent/JP6700322B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| EP2959672A1 (en) | 2015-12-30 |
| JP6700322B2 (ja) | 2020-05-27 |
| US20150358646A1 (en) | 2015-12-10 |
| EP2959672B1 (en) | 2019-12-04 |
| JP6309978B2 (ja) | 2018-04-11 |
| CN104995903B (zh) | 2019-07-09 |
| US9699482B2 (en) | 2017-07-04 |
| RU2015139690A (ru) | 2017-03-24 |
| BR112015019787A2 (pt) | 2017-07-18 |
| MX350910B (es) | 2017-09-25 |
| MX2015010673A (es) | 2015-12-16 |
| PL2959672T3 (pl) | 2020-06-01 |
| CN109064433A (zh) | 2018-12-21 |
| ES2770426T3 (es) | 2020-07-01 |
| US20170339433A1 (en) | 2017-11-23 |
| JP2018110403A (ja) | 2018-07-12 |
| CN104995903A (zh) | 2015-10-21 |
| RU2633128C2 (ru) | 2017-10-11 |
| WO2014128586A1 (en) | 2014-08-28 |
| US10182247B2 (en) | 2019-01-15 |
| JP2016517637A (ja) | 2016-06-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN109064433B (zh) | 改进的hdr图像编码和解码方法及设备 | |
| JP7343629B2 (ja) | Hdr画像をエンコードする方法及び装置 | |
| JP6596125B2 (ja) | Hdrイメージの符号化のためのコードマッピング関数を作成するための方法及び装置、並びに、かかる符号化イメージの使用のための方法及び装置 | |
| EP3381179B1 (en) | Handling multiple hdr image sources | |
| US10057600B2 (en) | Brightness region-based apparatuses and methods for HDR image encoding and decoding | |
| US10027965B2 (en) | HDR image encoding and decoding methods and devices | |
| JP6009538B2 (ja) | Hdr画像を符号化及び復号するための装置及び方法 | |
| CN109219961B (zh) | 对hdr视频进行编码和解码的方法和装置 | |
| BR112015019787B1 (pt) | Codificador de imagem, decodificador de imagem, método de codificação de imagem, método de decodificação de imagem, sinal de imagem, e, objeto de memória |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |