具体实施方式
以下说明的本发明实施例是出于说明本发明之目的而示例性列举的。本发明的实施例可以以多样的形态实施,不得解释为本发明限定于以下提示的实施例或对这些实施例的具体说明。
本实施例中使用的术语“部”,意味着软件、诸如FPGA(field-programmable gatearray)、ASIC(application specific integrated circuit)的硬件构成要素。但是,“部”并非限定于硬件及软件。“部”既可以构成得位于可寻址的存储介质中,也可以构成得播放一个或其以上的处理器。因此,作为一个示例,“部”包括诸如软件构成要素、客体指向软件构成要素、集群构成要素及任务构成要素的构成要素,处理器,函数,属性,程序,子程序,程序代码的片段,驱动器,固件,微码,电路,数据,数据库,数据结构,工作表,阵列及变数。构成要素和“部”内提供的功能可以结合成更少数量的构成要素及“部”,或进一步分离成追加的构成要素和“部”。
本说明书中使用的所有技术术语及科学术语,只要未不同地定义,则具有本发明所属技术领域的普通技术人员一般理解的意义。本说明书中使用的所有术语是出于为了更明确说明本发明的目的而选择的,并非是为了限制本发明的范围而选择的。
只要未不同地提及,本说明书中记述的单数型的表现也一同包括复数型表现,这也同样适用于权利要求项中记载的单数型的表现。
在本发明的多样实施例中使用的“第一”、“第二”等表现,只是为了相互区分多个构成要素而使用的,并非限定相应构成要素的顺序或重要度。
本说明书中使用的诸如“包括的”及“具有的”表现,只要在包含相应表现的语句或文章中未特别提及不同,则应理解为内含包括其它实施例可能性的开放型术语(open-ended terms)。
在本说明书中,“基于~”的表现,用于记述对在包含相应表现的语句中描述的决定或判断行为或者对动作产生影响的一个以上的因子,该表现不排斥对决定或判断行为或对动作产生影响的追加性因子。
在本说明书中,当提及某种构成要素“连接于”或“接续于”另一构成要素时,应理解为既可以是所述某种构成要素直接连接于或接续于所述另一构成要素,也可以是在所述某种构成要素与所述另一构成要素之间存在新的其它构成要素。
下面参照附图,详细说明本发明的实施例。对于附图上的相同构成要素,使用相同的参照符号,省略对相同构成要素的重复说明。
<定位手术用手术机器人系统>
图1显示了本发明一个实施例的可以执行定位手术的手术机器人系统用于手术的示例。如图所示,医生(或用户)可以利用诸如定位手术部1的手术机器人,执行对患者160的定位手术。医生可以研究在用户界面150中显示的手术部位的图像,决定将进行手术的手术目标的位置及手术工具进入患者160内部的位置。
如果医生通过用户界面150输入了手术目标的位置及手术工具的进入位置,则基于此控制定位手术部1的动作,从而,附着于定位手术部1的手术工具可以接近手术目标。其中,“手术目标”(或手术对象)可以意味着通过手术工具进行去除或治疗的对象,例如肿瘤或在脏器、血管或骨骼中有病灶的部分等。例如,手术目标可以位于患者160的体内或外部表面(或皮肤)。手术工具的“进入位置”(或入口)可以意味着当手术目标在患者的体内时,手术工具为了接近手术目标而最初接触或通过的患者外部表面上的位置。例如,当手术工具为了去除存在于患者的颅内的肿瘤而进行动作时,手术工具的进入位置可以设置于患者的头皮上。
根据一个实施例,定位手术部1的动作可以利用手术机器人系统中包括的拍摄部120及跟踪部130而准确地控制。拍摄部120可以生成显示出诸如脑或脊椎的包括手术目标的手术部位的外部三维图像的成像数据。其中,“成像数据(imaging data)”可以意味着能够以可在视觉上识别诸如手术部位的拍摄对象的形态显示的数据,例如,可以包括在视觉上显示手术部位的二维或三维图像及与该图像相关的坐标系信息。跟踪部130可以跟踪附着于拍摄部120、定位手术部1及患者160的标记170、172、174,跟踪各个标记附着的对象的位置及姿势。根据本发明的手术机器人系统,可以利用跟踪部130,决定附着于定位手术部1的手术工具的现在位置。另外,基于通过拍摄部120及跟踪部130生成的信息,手术工具可以从现在位置,移动到通过用户界面150输入的手术目标的位置。
根据一个实施例,定位手术部1可以附着于手术台110使用。因此,在定位手术中,即使手术台110移动,定位手术部1与手术台110一同移动,因此,手术工具导向手术目标的位置可以不变。另外,如果定位手术部1附着于手术台110使用,则定位手术部1可以位于患者近处,因而附着于定位手术部1的手术工具能够实现精密控制,能够防止因定位手术部1而妨碍医生的移动路线。
下面就通过图1的示例概略地说明的本发明手术机器人系统的多样实施例进行更具体说明。
图2是显示本发明一个实施例的手术机器人系统100的框图。手术机器人系统100作为可以执行定位手术的手术机器人系统,可以包括定位手术部1、拍摄部120、跟踪部130及控制部140。定位手术部1可以包括能够对包含于手术部位的手术目标实施定位手术的手术工具和能够引导该手术工具的装置。
根据一个实施例,定位手术部1可以是能够以至少五自由度以上的自由度进行动作的定位手术用手术机器人。例如,定位手术部1可以沿至少三个轴方向移动手术工具,可以以至少两个旋转轴为中心,使手术工具旋转。定位手术部1可以附着于手术台110使用。
根据一个实施例,定位手术部1可以根据手术目标的位置及手术工具的进入位置,分别独立地执行手术工具的移动及旋转。其中,所谓分别独立地执行手术工具的移动及旋转,可以意味着在定位手术部1中,使手术工具移动的构成和使手术工具旋转的构成分离体现,根据这种构成,手术工具的移动和旋转可以个别地控制、执行。例如,定位手术部1可以根据手术目标的位置,首先使手术工具移动,根据手术工具的进入位置,决定手术工具接近或插入手术目标的姿势或方向后,旋转手术工具,使手术工具具有这种姿势。因此,在定位手术中,当手术工具对相同手术目标的进入位置变更时,通过简单地只变更手术工具的姿势,手术便能够在短时间内重新开始。关于定位手术部1的构成和动作的更具体的实施例将在后面相关部分说明。
拍摄部120可以生成代表手术部位的外部二维或三维图像的成像数据。根据一个实施例,拍摄部120可以生成代表患者160表面图像的成像数据,或生成代表手术目标或手术工具进入位置(或其周边)的图像的成像数据。根据一个实施例,拍摄部120可以基于利用图案光等的相位迁移方式(Phase Measuring Profilometry)生成代表三维图像的成像数据。
由拍摄部120生成的成像数据可以传递给用户界面150,在用户界面150上进行视觉显示。另外,由拍摄部120生成的成像数据还可以存储于存储装置180后,用于手术之后的手术结果分析或治疗。
根据一个实施例,由拍摄部120生成的成像数据和代表手术前预先拍摄的包括手术目标在内的手术部位三维图像的成像数据可以整合。代表手术部位的三维图像的成像数据可以在手术前存储于存储装置180。用户界面150可以在视觉上显示两种成像数据整合的结果。例如,用户界面150可以是能够基于任意的成像数据而显示该数据所代表的二维或三维图像的显示装置。代表手术前预先拍摄的手术部位三维图像的成像数据可以是关于手术部位的CT或关于MRI图像的成像数据。
根据又一实施例,控制部140可以基于利用拍摄部120生成的成像数据,控制定位手术部1。与拍摄部120相关的更具体实施例将在后面相关部分说明。
跟踪部130是用于跟踪物体移动的装置,是可以具体跟踪物体的位置和/或姿势的装置。根据一个实施例,跟踪部130测量附着于跟踪对象的标记的位置和/或姿势,从而可以跟踪附着了标记的对象。例如,把标记附着于手术工具后,跟踪部130跟踪附着于手术工具的标记的位置和/或姿势,从而可以跟踪手术工具。
根据一个实施例,可以利用跟踪分别附着于拍摄部120、定位手术部1及患者160的手术部位或手术部位近处的标记170、172、174的结果,控制定位手术部1。根据跟踪的目的,标记可以附着于手术机器人系统100的各构成或定位手术中使用的工具/装置的多样的位置。关于跟踪部130的构成和动作的更具体实施例将在后面相关部分说明。
控制部140可以控制包括定位手术部1、拍摄部120、跟踪部130、用户界面150的手术机器人系统100的多样构成要素的动作。控制部140可以存储及运行用于控制这些构成要素的包括手术计划软件及导航软件在内的控制用软件。另外,控制部140可以包括一个以上能够运行些软件的诸如CPU的处理器。
根据一个实施例,控制部140可以位于手术室内,控制手术机器人系统100。根据又一实施例,控制部140可以位于手术室外部,通过有线或无线网络连接到手术机器人系统100,控制手术机器人系统100。根据又一实施例,控制部140的功能可以分散于手术机器人系统100的不同构成要素而体现。例如,能够控制跟踪部130的控制部140的功能可以在跟踪部130内体现,能够控制拍摄部120的控制部140的功能可以在拍摄部120内体现。控制部140可以通过有线或无线网络,与手术室或医院内部或外部安装的数据库连接,可以从该数据库接收包括手术所需的成像数据在内的多样数据。
下面说明与手术机器人系统100中包括的各个构成相关的具体实施例。
<定位手术部1>
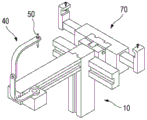
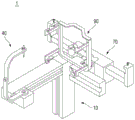
图3显示了可作为图2的定位手术部1使用的本发明一个实施例的定位手术用手术机器人。本实施例的定位手术用手术机器人可以包括移动部10和旋转部40及手术部位支撑部70,构成得能够拆装于手术台。在旋转部40的一端可以配备有手术工具50,定位手术用手术机器人可以控制移动部10及旋转部40,调整手术工具50的位置及姿势。本实施例的定位手术用手术机器人可以根据手术目标的位置而使移动部10移动,根据手术工具进入位置或姿势而使旋转部40旋转。移动部10和旋转部40可以分别独立地控制。
下面参照图4及图5,详细说明旋转部40能旋转地连接的移动部10的详细构成和动作。根据一个实施例,移动部10可以进行动作,使旋转部40及固定于旋转部40一端的手术工具50沿三个轴中的至少一个轴方向往复移动,因此,移动部10可以具有三自由度。移动部10可以包括沿着第一至第三线性轴方向13、15、17进行移动的第一至第三方向驱动部12、14、16。
在本实施例中,作为示例,第一至第三线性轴方向13、15、17相互直交,各个驱动部12、14、16可以沿着相互直交轴而往复移动。根据又一实施例,第一至第三线性轴方向13、15、17也可以以不直交的任意方式排列。第一至第三方向驱动部12、14、16例如可以利用包括线性马达、滚珠螺杆等在内的多样的机械性或电气性驱动手段中的一种而体现。在本实施例中,移动部10可以通过固定部11,与手术部位支撑部70的连接部72能拆装地连接,在第三驱动部16,可以能旋转地连接有旋转部40。
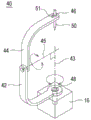
参照图5,说明旋转部40的详细构成和动作。旋转部40可以包括连接于第三方向驱动部16的第一旋转驱动部42及与第一旋转驱动部42连接的第二旋转驱动部44。第一及第二旋转驱动部42、44可以分别以第一及第二旋转轴43、45为中心旋转。例如,第一及第二旋转驱动部42、44分别可以利用包括伺服马达、液压马达等在内的多样的机械性或电气性驱动手段中的一种而体现。
如图所示,第一及第二旋转驱动部42、44可以设计成圆弧或与之类似的形状。通过采用这种形状,可以在旋转部40加装能够覆盖旋转部40全体的一体型布单(drape),可以卫生地加装及更换布单。第一及第二旋转驱动部42、44的形状不限定于图5所示内容,可以根据使用本发明的手术机器人系统的手术部位或手术方式,变更为多样的形状。
本实施例的第二旋转驱动部44可以包括与第二旋转驱动部44连接的手术工具50,及可以能拆装地保持手术工具50的夹持器46。夹持器46构成得使多样类型的手术工具可以简易地拆装。通过安装具有这种构成的夹持器46,医生可以缩短手术工具的更换时间,从而迅速执行手术。
另一方面,在第二旋转驱动部44还可以配备有感知手术工具50拆装与否的手术工具感知部51。当借助于手术工具感知部51而感知手术工具50的加装时,控制部140可以进行控制,使移动部10的各驱动部12、14、16固定而不再移动。根据这种控制部140的移动部10动作控制,能够防止手术中因手术机器人的误操作或物理性冲击导致移动部移动而发生的致命性医疗事故,能够安全地手术。
在本实施例中,第一旋转轴43和第二旋转轴45设置得相互直交,手术工具50附着于第二旋转驱动部44,从而能够保持手术工具50的前端朝向第一旋转轴43与第二旋转轴45交叉地点的姿势。因此,即使第一旋转驱动部42和第二旋转驱动部44以第一旋转轴43和第二旋转轴45为中心分别旋转,第一旋转轴43与第二旋转轴45交叉的地点也能够既定地保持,保持手术工具50的前端朝向第一旋转轴43与第二旋转轴45交叉地点的姿势。在旋转部40借助于移动部10进行移动而使得第一旋转轴43与第二旋转轴45交叉的地点与手术目标的位置一致期间,手术工具50的前端保持朝向手术目标位置的姿势,因此,在手术目标的位置保持既定的状态下,手术工具50的进入姿势可以适宜地进行选择。因此,即使旋转部40使手术工具50旋转,也能够在既定地保持手术目标的位置的同时,控制定位手术用手术机器人的动作。其中,所谓“手术目标的位置”,可以意味着手术目标的某一地点或包括该地点的手术目标所占据的三维空间的位置。另外,所谓手术目标的“地点”,可以意味着在充分小到视觉上可被识别为一点的程度的二维或三维区域,并非限定于数学或物理意义的点。
具有以上说明的构成的移动部10根据手术目标的位置,使旋转部40移动,旋转部40根据手术工具的进入姿势而使手术工具50旋转,从而可以根据手术目标的位置和手术工具姿势,分别独立地控制移动部10和旋转部40。以往,为了控制手术工具,使用相当复杂的手术机器人动作控制方式,无法独立地进行基于手术目标位置的控制和基于手术工具进入姿势的控制。但是,根据本实施例,可以根据手术目标的位置和手术工具的进入姿势分别独立地控制移动部10和旋转部40,因而可以提高手术机器人和手术工具的控制的精密度和效率性。
在本实施例中,在旋转部40的第一旋转驱动部42和第三方向驱动部16的连接部分,可以还包括以第一旋转轴43为中心形成的中空48。在中空48的下部,可以安装有用于通过中空48而拍摄手术部位或其它患部的医疗图像的拍摄装置。根据这种构成,在对手术工具位置的校准或手术中为了观察患者状态而拍摄手术部位等的情况下,防止移动部10或旋转部40遮挡拍摄对象部分。另外,如上所述,在第一旋转驱动部42及第三方向驱动部16的连接部分,沿第一旋转轴43方向形成中空48,从而定位手术用手术机器人的运转与包括C臂在内的多样医疗影像装置的使用可以互不干扰。例如,中空48可以使用在第一旋转驱动部42和第三方向驱动部16的连接部分沿第一旋转轴43方向形成的中空型旋转接口而体现。
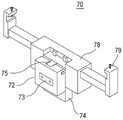
参照图6,详细说明手术部位支撑部70的详细构成和动作。可以具备手术部位支撑部70,以便能够适宜调节相对于患者或手术部位的移动部10及旋转部40的位置。通过配备手术部位支撑部70,在手术时,患者可以采取更舒适的姿势。在本实施例中,手术部位支撑部70包括姿势调节部74、75、连接部72及手术台固定部78。
连接部72可以包括能够与移动部10连接的连接构件73。连接构件73可以利用螺栓及螺母或包括其的多样的机械性连接手段中的一种而体现,以便能够可拆装地连接移动部10的固定部11和连接部72。连接构件73可以利用多个螺栓及螺母而体现,通过这种构成,可以实现移动部10与手术部位支撑部70之间的高可靠性连接及固定。
姿势调节部74、75可以包括调节手术部位的角度的角度调节部75及调节手术部位的高度的高度调节部74。角度调节部75可以利用能够以一个轴为中心调节连接部72与高度调节部74之间的角度的手动或自动机械装置来体现。手动机械装置可以包括铰链或连杆结构等在内的多样的手动式结构,自动机械装置可以包括伺服马达或液压缸等驱动器。高度调节部74相对于手术台固定部78,能向高度方向移动地连接,从而能够调节连接于高度调节部74的其它构成要素的全体高度。高度调节部74可以利用包括滚珠螺杆或线性马达等在内的手动或自动机械装置来体现。
手术台固定部78可以构成得把手术部位支撑部70整体固定于手术台110。由此,包括移动部10和旋转部40的定位手术用手术机器人可以整体固定于手术台110。手术台固定部78可以包括用于手术台110与手术台固定部78的坚固固定的夹紧部79。夹紧部79把手术台固定部78夹紧于手术台110的一部分(例如,在侧面配备的轨道),从而可以把手术部位支撑部70整体固定于手术台110。在本实施例中,作为示例,手术台固定部78采用了夹紧部79,但手术台固定部78可以利用螺丝、形态结合等多样的固定器具而固定于手术台110。
参照图7及8,详细说明手术部位固定部90的详细结构及动作。一般而言,在定位手术装置中,需要把患者的手术部位(例如,患者的头)相对于手术工具无晃动地固定。为此,在本实施例中,手术部位固定部90可以包括手术部位固定架92、93和手术部位固定销94。手术部位固定架92、93由用于固定手术部位的横向手术部位固定架92和纵向手术部位固定架93构成,在纵向手术部位固定架93的一端,附着有能够精密地固定患者的手术部位的手术部位固定销94。在本实施例中,作为示例,手术部位固定部90包括一个横向手术部位固定架92和四个纵向手术部位固定架93,但横向手术部位固定架92和纵向手术部位固定架93的个数或它们之间的连接构成可以根据需要而适宜地变更。
本实施例的手术部位固定架92、93为了提高与拍摄部120在使用上互不干扰可能性,可以变更为适宜的形态。例如,当对患者头部进行手术时,拍摄患者的图像,在该图像中提取患者的眼睛、鼻子、眉心、耳朵等特征区域,从而能够预测及判断患者的手术部位(即,头)的精密位置。此时,手术部位固定架92、93可以构成得不妨碍患者的特征区域的拍摄。在本实施例中,例如,横向手术部位固定架92上方的中央部分可以具有凹陷的形状,以便不与患者的鼻子部位干扰,另一方面,纵向手术部位固定架93可以与横向手术部位固定架92最外端连接,以便不遮挡患者的耳朵部位。因此,本实施例的横向手术部位固定架92及纵向手术部位固定架93能够防止遮挡患者的特征区域,保障在手术中拍摄部120对患者特征区域的拍摄。
手术部位固定架92、93及手术部位固定销94例如可以以诸如金属的具有耐久性和坚固特性的材质制作。不过,当使用这种金属性材质时,一旦与诸如电子控制装置或测量装备的电气装置接触,会使患者触电。因此,为了防止这种情况,绝缘手段可以连接于手术部位固定架92、93,以便电气装置与患者不电气接触。具体而言,在手术部位固定架92、93与连接部72之间包括绝缘手段95,从而手术部位固定架92、93与连接部72可以以不电气连接的状态结合。
本实施例中的手术部位固定部90可以能拆装地连接于连接部72,因而可以选择与手术目的相符的形状及大小的手术部位固定部90并简单地更换。另外,手术部位固定部90可以直接固定于手术部位支撑部70,因而即使在移动部10的移动及旋转部40的旋转中,手术部位固定部90也可以稳定地固定手术部位。
本实施例的定位手术用手术机器人可以通过控制部140自动地控制。下面对定位手术用手术机器人的控制方法进行详细说明。
控制部140可以决定基于手术计划的手术部位的位置及手术工具进入位置,根据决定的位置输出控制信号,该信号使得移动部10及旋转部40使手术工具移动。基于控制部140输出的控制信号,移动部10根据手术目标的位置信息,沿三个轴中的至少一个轴方向移动,以便两个旋转轴交叉的地点与手术目标的位置一致。另外,基于控制部140输出的控制信号,旋转部40可以根据手术工具的进入姿势信息,使手术工具50以两个旋转轴中的至少一个旋转轴为中心旋转。更具体而言,基于控制部140输出的控制信号,移动部10可以沿着第一线性轴方向,使第一方向驱动部移动,或沿着第二线性轴方向,使所述第二方向驱动部移动,或沿着第三线性轴方向,使所述第三方向驱动部移动。另外,旋转部40可以基于控制部140的控制信号,使第一旋转驱动部以第一旋转轴为中心旋转,或使第二旋转驱动部以第二旋转轴为中心旋转。
如上所述,根据手术目标的位置和手术工具进入姿势,移动部10和旋转部40分别独立地控制,因而在手术机器人的动作控制方面,能够减小误差,即使发生误差,也可以减少修正该误差所需的追加动作控制。
另外,控制部140可以进行控制,使角度调节部75及高度调节部74调节手术部位的角度及高度中至少一个。
本发明的定位手术用手术机器人通过一个示例性的实施例进行了说明,但包括定位手术可以应用的多样的手术部位(人体的头、脊椎、关节等)在内均可应用。
<跟踪部130>
跟踪部130作为能够跟踪物体的移动的装置,具体而言,是能够测量物体的位置和/或姿势的装置。跟踪方法不进行特别限制,一般基于光学技术的光学跟踪(opticaltracking)方法或基于电磁波技术的电磁波跟踪(electromagnetic tracking)方法均可使用。另外,也可以复合使用多样的跟踪方法。
跟踪部130测量的位置,例如可以用诸如直角坐标系X、Y、Z轴上坐标的空间坐标定义。跟踪部130测量的姿势可以用诸如翻滚角(roll)、俯仰角(pitch)、偏航角(yaw)的旋转信息定义。为了物体的准确跟踪,可以测量如此定义的物体的位置及姿势的六自由度(6Degree of Freedom)。
根据一个实施例,跟踪部130通过测量附着于物体的标记的位置和/或姿势,从而可以跟踪物体。例如,把标记附着于手术工具后,跟踪部130通过测量附着于手术工具的标记的位置和/或姿势,从而可以跟踪手术工具。
根据一个实施例,跟踪部130可以把回射器(retroreflector)用作标记,测量标记的位置。根据又一实施例,为了同时测量跟踪对象的位置及姿势,附着有三个以上的多个标记的结构物可以附着于跟踪对象。此时,作为标记,可以使用回射器,但只要是跟踪部130可以识别位置的标记,任何形态的标记均可使用。根据一个实施例,可以比较通过跟踪部130测量的三个以上的标记间的几何学位置关系与预先存储的三个以上的标记间的几何学位置关系,同时测量跟踪对象的位置及姿势。
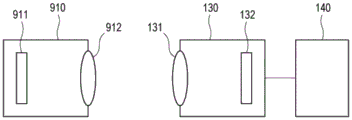
另一方面,为了简化标记,可以只使用一个标记,测量附着了标记的物体的位置及姿势。图9是根据本发明的一个实施例,显示在使用一个标记的光学跟踪方法中可以应用的标记910及跟踪部130的框图。标记910可以包括体现图案的至少一个图案部911及能够扩大图案部911的图案并传送的第一透镜912。跟踪部130可以包括能够把从标记910传送的图案部911图案成像为图像的第二透镜131及成像元件132。根据一个实施例,为了加大图案部911的图案的识别范围或提高图案的识别率,跟踪部130可以使用两个以上,在一个跟踪部130内,成像元件132可以包括两个以上。
在图案部911形成的图案可以提供测量标记910位置及姿势所需的信息。根据一个实施例,在图案部911形成的图案可以由多个图案按既定形态和间隔排列形成,利用对这种图案进行成像的图像,可以决定标记910的位置及姿势。
根据一个实施例,成像元件132对在图案部911体现的图案的全部或一部分进行成像后,控制部140可以在成像的图像中提取显示图案的区域的大小变化,并基于此决定标记910的位置。具体而言,如果标记910的位置变化,则成像的图案的大小不同,这种图案大小变化可以与透镜131的直径及焦距进行比较并换算成位置。
根据又一实施例,在两个成像元件分别成像的图像中,显示出图案全部或一部分的区域的位置不同,控制部140可以利用基于此的三角法(triangulation),计算标记910的位置。根据一个实施例,控制部140可以基于图案内各图案区域的位置变化,决定标记910的姿势。根据一个实施例,控制部140的能够控制跟踪部130的功能可以与跟踪部130一体形成。
标记910可以以主动标记(active marker)或被动标记(passive marker)体现。在标记910为主动标记的情况下,标记910可以在内部包括光源。因此,标记910内部的光源可以向图案部911照射光线,照射的光线可以透过在图案部911形成的图案或被图案反射。跟踪部130可以接收透过图案或被图案反射的光线,对图案部911的图案的图像进行成像。控制部140可以基于如此成像的图像,跟踪标记910的位置及姿势。
在标记910为被动标记的情况下,在标记910的外部可以配置有朝向标记910照射光线的光源。因此,标记910的外部光源向标记910照射光线,照射的光线可以透过在图案部911形成的图案或被图案反射。跟踪部130可以接收透过图案或被图案反射的光线,对图案部911的图案的图像进行成像。控制部140可以基于如此成像的图像,跟踪标记910的位置及姿势。如果手术场所充分明亮,标记910的图案可以被跟踪部130明确识别,那么,无需追加的光源,也可以跟踪标记910。
根据一个实施例,标记910可以体现得使第一透镜912的焦点聚焦于图案部911的图案面。为此,图案部911的图案面的形状可以与第一透镜912的焦点聚焦面的形状一致地体现,或者可以设计第一透镜912,使第一透镜912的焦点聚焦于图案部911的图案面。
如果标记910体现得使第一透镜912的焦点聚焦于图案部911的图案面,另外,跟踪部130的成像元件132位于第二透镜131的焦距,那么,标记910与跟踪部130的光学系可以形成无限远光学系。如果标记910与跟踪部130形成无限远光学系,则跟踪部130可以对通过无限远光学系扩大的图案图像进行成像。因此,即使标记910远离跟踪部130,也能够提高跟踪部130中的图案的识别率。
跟踪部130可以利用成像元件132,对通过第二透镜131传递的图案进行成像。成像元件132作为把通过光线传递的图像信息变换成电气信号的装置,代表性地可以利用CMOS图像传感器或CCD等而体现。根据一个实施例,成像元件132可以在与第二透镜131的焦距相应的位置对图像进行成像。
<拍摄部120>
拍摄部120是可以生成代表手术部位外部图像的成像数据的装置。根据一个实施例,拍摄部120可以生成获得患者160的表面图像或者代表手术部位或手术工具进入位置(或其周边)图像的成像数据。拍摄部120虽然可以是能够生成代表诸如普通摄像头图像的二维图像的成像数据的装置,但也可以是能够生成代表为了进行诸如定位手术的精密手术所需三维图像的成像数据的装置。
根据一个实施例,拍摄部120可以基于利用图案光等的相位迁移方式,生成代表三维图像的成像数据。例如,对向患者照射既定形态的图案光并拍摄的图像进行处理,可以生成代表三维图像的成像数据。图案光可以是诸如格子图案光的照度具有正弦波形态的图案光,但不限定于此。就照射的图案光而言,在患者160的表面上的光线强度会因患者160表面的折弯而异,由此生成相位数据,计算构成表面的各点的高度,从而可以生成代表三维图像的成像数据。
根据一个实施例,拍摄部120可以在拍摄部120内包括的图像处理部生成代表三维图像的成像数据。根据又一实施例,控制部140也可在接收拍摄部120获得的图像数据后,处理图像数据,生成代表三维图像的成像数据。
根据一个实施例,由拍摄部120生成的成像数据可以通过用户界面150在视觉上显示。根据又一实施例,利用由拍摄部120生成的成像数据所代表的拍摄部图像与其它图像间的图像整合,两图像可以重叠,该结果可以通过用户界面150而在视觉上显示。例如,如图10所示,利用拍摄部120获得的关于手术工具进入位置1030周边1050的拍摄部图像与手术前预先获得的包含手术目标1010的手术部位图像间的图像整合,拍摄部图像可以在手术部位图像上重叠。
根据一个实施例,图像整合可以利用拍摄部图像和与之整合的其它图像中共同包含的手术部位的至少一部分而执行。根据又一实施例,包括相同基准标记(fiducialmarker)地获得拍摄部图像及将与之整合的其它图像后,可以利用两图像包含的基准标记执行图像整合。
<手术机器人系统100的控制方法>
一般而言,定位手术是对诸如脑的医生难以直接目视确认的部位的手术。因此,医生可以分析诸如CT或MRI图像的包含位于患者160体内的手术目标的手术部位三维图像或这种三维图像的二维剖面图像,决定手术目标,可以决定手术工具能够安全进入手术目标的位置。例如,通过用户界面150显示CT图像后,医生研究CT图像,从而可以决定手术目标的位置和/或手术工具的进入位置,可以通过用户界面150输入决定的位置。本发明的定位手术部1可以基于医生输入的手术目标的位置和/或手术工具的进入位置进行控制。
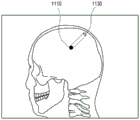
图11显示了在手术部位的三维图像中,医生输入手术目标的位置1110及手术工具的进入位置1130的结果。根据一个实施例,诸如医生的用户可以在通过用户界面150显示的图像中,利用触摸屏等,输入手术目标的位置1110或手术工具的进入位置1130。根据又一实施例,用户可以打出坐标值,输入手术目标的位置1110或手术工具的进入位置1130。
如上所述,手术目标的位置1110或手术工具的进入位置1130通过用户界面输入后,控制部140可以基于输入的手术目标的位置1110,控制定位手术部1的动作。
根据一个实施例,控制部140可以基于输入的手术目标的位置1110,使定位手术部1的移动部10沿三个轴中的至少一个轴方向移动。在移动部10,可以附着有使手术工具旋转的旋转部40。因此,随着移动部10的移动,旋转部40可以移动。根据一个实施例,控制部140可以通过移动部10而使旋转部移动,以便与手术目标的位置对应的坐标位于旋转部40的两个旋转轴的交叉点。
根据一个实施例,控制部140可以基于借助于用户输入的手术目标的位置1110及手术工具的进入位置1130,决定手术工具的进入姿势。控制部140可以使附着有手术工具的旋转部40以两个旋转轴中至少一个旋转轴为中心旋转,以便手术工具具有决定的手术工具进入姿势。
定位手术部1可以以定位手术部1的坐标系为基准进行驱动。可是,通过用户界面150输入的手术目标的位置1110及手术工具的进入位置1130不是定位手术部1的坐标系,而是用户界面150中显示的图像的坐标系上的位置。因此,为了以定位手术部1的坐标系为基准控制定位手术部1,以用户界面150中显示的图像的坐标系为基准输入的手术目标的位置1110和手术工具的进入位置1130应转换成定位手术部1的坐标系基准的位置。
根据一个实施例,控制部140可以接收手术前预先拍摄的代表诸如CT或MRI图像的三维图像的成像数据(“第一成像数据”)。第一成像数据可以是关于包含手术目标的手术部位的成像数据。第一成像数据可以在手术前预先存储于存储装置180。控制部140可以接收通过拍摄部120生成的代表手术部位外部三维图像的成像数据(“第二成像数据”)。控制部140可以(i)生成用于把坐标从第一成像数据的第一坐标系变换成第二成像数据的第二坐标系的第一坐标变换关系,可以(ii)利用跟踪部130,跟踪拍摄部120的位置及姿势。
控制部140可以利用第一坐标变换关系和拍摄部120的位置及姿势,生成用于把坐标从第一成像数据的第一坐标系变换成定位手术部1的第四坐标系的坐标变换关系。
下面参照图12,进行更具体说明。首先,用户可以通过用户界面150,输入手术目标的位置1110和手术工具的进入位置1130。控制部140可以把用户输入的手术目标的位置1110及手术工具的进入位置1130变换成第一成像数据的第一坐标系1210上的坐标。
根据一个实施例,为了把第一成像数据的第一坐标系1210上的位置变换成定位手术部1的第四坐标系1230上的位置,第一成像数据的第一坐标系1210上的坐标可以按患者标记174的第三坐标系1220上的坐标、定位手术部1的第四坐标系1230上的坐标顺序变换。为了这种坐标变换,可以获得(i)用于把坐标从第一成像数据的第一坐标系1210变换成患者标记174的第三坐标系1220的第二坐标变换关系和(ii)用于把坐标从患者标记174的第三坐标系1220变换成定位手术部1的第四坐标系1230的第三坐标变换关系。其中,患者标记174可以是附着于患者160的手术部位的标记,或附着于接近手术部位配置并象定位手术部1的手术部位固定部90一样与患者160一体地共同移动的对象的标记。患者标记174可以在这种对象上附着至少一个。
把坐标从第一成像数据的第一坐标系1210变换成患者标记174的第三坐标系1220的第二坐标变换关系,可以利用(i)用于把坐标从第一成像数据的第一坐标系1210变换成第二成像数据的第二坐标系1240的第一坐标变换关系和(ii)利用跟踪部130获得的拍摄部120的位置及姿势而获得。具体而言,如图13所示,第一成像数据的第一坐标系1210上的坐标按第二成像数据的第二坐标系1240上的坐标、拍摄部120的第五坐标系1250上的坐标、患者标记174的第三坐标系1220上的坐标顺序变换后,坐标可以从第一成像数据的第一坐标系1210变换成患者标记174的第三坐标系1220。
第二成像数据可以在定位手术进行之前或定位手术进行过程中,利用拍摄部120而生成。根据一个实施例,利用第一成像数据代表的三维图像和第二成像数据代表的三维图像间的图像整合,可以生成用于把坐标从第一成像数据的第一坐标系1210变换成第二成像数据的第二坐标系1240的第一坐标变换关系。第一成像数据代表的三维图像和第二成像数据代表的三维图像间的图像整合可以利用两图像中共同包含的手术部位的至少一部分而执行。根据又一实施例,获得包括相同基准标记相关数据的第一成像数据和第二成像数据后,可以利用该基准标记执行图像整合。此外,已知的多样的图像整合方法可以用于生成第一坐标变换关系。
根据一个实施例,用于把坐标从第二成像数据的第二坐标系1240变换成拍摄部120的第五坐标系1250的第四坐标变换关系,可以利用(i)用于把坐标从拍摄部120的光学系的基准坐标系变换成拍摄部120的第五坐标系1250的坐标变换关系和(ii)用于把坐标从第二成像数据的第二坐标系1240变换成拍摄部120的光学系的基准坐标系的坐标变换关系而生成。
用于把坐标从拍摄部120的第五坐标系1250变换成患者标记174的第三坐标系1220的第五坐标变换关系,可以利用(i)用于把坐标从拍摄部120的第五坐标系1250变换成跟踪部130的坐标系的坐标变换关系和(ii)用于把坐标从患者标记174的第三坐标系1220变换成跟踪部130的坐标系的坐标变换关系而生成。
此时,用于把坐标从拍摄部120的第五坐标系1250变换成跟踪部130的坐标系的坐标变换关系及用于把坐标从患者标记174的第三坐标系1220变换成跟踪部130的坐标系的坐标变换关系,可以通过利用跟踪部130测量的患者标记174及拍摄部标记170的位置及姿势而生成。
用于把坐标从患者标记174的第三坐标系1220变换成定位手术部1的第四坐标系1230的第三坐标变换关系,可以利用(i)位于定位手术部1原点的标记的位置及姿势和(ii)患者标记174的位置及姿势而生成。此时,各标记的位置及姿势可以利用跟踪部130进行测量。其中,定位手术部1的原点可以定义为定位手术部1的旋转轴的交点。根据又一实施例,患者标记174附着的位置和定位手术部1的原点位置既定,第三坐标变换关系可以通过利用了这点的几何学演算(机构学演算)而生成。
如上所述,如果把第一成像数据的第一坐标系1210上的坐标按患者标记174的第三坐标系1220上的坐标、定位手术部1的第四坐标系1230上的坐标顺序变换,则用第一成像数据的第一坐标系1210上的坐标表现的手术目标的位置1110及手术工具的进入位置1130可以变换成定位手术部1的第四坐标系1230上的坐标。另一方面,如果患者160移动,则如上所述的坐标变换关系变化,因此,患者160应固定,以便不移动,如果患者160移动,则控制部140应能够重新获得上述坐标变换关系。
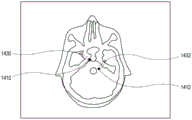
根据一个实施例,本发明的定位手术部1可以基于构成第一成像数据所代表三维图像的二维剖面图像中显示的手术目标的位置和/或手术工具的进入位置进行控制。图14至16分别是手术前拍摄的手术部位的轴平面(axial plane)、矢状面(sagittal plane)及冠状面(coronal plane)上的二维剖面图像。控制部140可以从第一成像数据提取这种二维剖面图像,将其通过用户界面150向用户可视化。
用户可以在通过用户界面150而可视化的二维剖面图像中标识手术目标的位置1410、1412及手术工具的进入位置1430、1432。控制部140把二维剖面图像的第六坐标系1260上标识的手术目标的位置1410、1412和/或手术工具的进入位置1430、1432变换成定位手术部1的第四坐标系1230上的位置后,可以根据变换的手术目标的位置而使移动部10移动。另外,控制部140可以使附着有手术工具的旋转部40旋转,以便手术工具具有基于变换的手术目标的位置及手术工具的进入位置而决定的手术工具进入姿势。
如图12所示,为了把二维剖面图像的第六坐标系1260上标识的坐标变换成定位手术部1的第四坐标系1230上的坐标,二维剖面图像的第六坐标系1260上的坐标可以分别按(i)第一成像数据上的第一坐标系1210上的坐标、(ii)患者标记174的第三坐标系1220上的坐标、iii定位手术部1的第四坐标系1230上的坐标顺序变换。
可是,用于把坐标从第一坐标系1210变换成第三坐标系的第二坐标变换关系及用于把坐标从第三坐标系变换成第四坐标系的第三坐标变换关系,可以通过前面说明的实施例预先生成。因此,如果用户希望通过用户界面150显示的二维剖面图像来控制定位手术部1,则单纯只生成用于把坐标从二维剖面图像的第六坐标系1260变换成第一成像数据的第一坐标系1210的坐标变换关系,便可以控制定位手术部1。
根据一个实施例,二维剖面图像可以从第一成像数据生成,因此,基于该生成关系,可以生成能够把坐标从二维剖面图像的第六坐标系1260变换成第一成像数据的第一坐标系1210的坐标变换关系。
另一方面,控制部140在使附着于定位手术部1的手术工具移动和/或旋转之前,需要掌握手术工具的基础位置及姿势。根据一个实施例,为了掌握手术工具的位置及姿势,可以在定位手术部1的旋转部40中靠近手术工具处附着定位手术部标记172,借助于跟踪部130,测量定位手术部标记172的位置及姿势。不过,定位手术部标记172的位置及姿势是在跟踪部130的坐标系上的位置及姿势。因此,控制部140把跟踪部130坐标系上的定位手术部标记172的位置及姿势变换为定位手术部1的第四坐标系1230上的位置及姿势后,基于变换的位置及姿势,可以掌握手术工具的初始位置及姿势。
如以上所作的说明,本发明的定位手术部1的控制可以从用于把坐标从手术前拍摄的CT或MRI图像坐标系变换成利用拍摄部120所获得的拍摄部图像坐标系的坐标变换关系(第一坐标变换关系)的生成开始。此时,该坐标变换关系可以通过两图像间的图像整合而简单地生成。可是,如果在定位手术中,患者160不可避免地移动,或定位手术部1的诸如手术部位固定部90的构成移动,手术部位发生移动,那么,用于定位手术部1控制的条件均会变更。此时,控制部140应能够重新获得前面说明的坐标变换关系。就本发明而言,在定位手术中即使有这种移动,如果利用拍摄部120,只重新生成成像数据,那么,利用该成像数据代表的图像与CT或MRI图像间的图像整合,便可以简单地重新生成用于控制定位手术部1的坐标变换关系。因此,在定位手术中,即使有患者160等的移动,也能够在短时间内重新开始定位手术。
另外,以往,定位手术用手术机器人的位置不固定,即使在手术中途也会移动,因此,为了以手术机器人的现在位置为基准控制手术机器人的动作,应能够准确掌握手术机器人的位置。为此,以往在手术机器人的底座附着了追加性标记,可以利用其掌握手术机器人的位置。但是,本发明的定位手术部1固定于手术台110使用,因此,定位手术部1与手术部位的位置关系可以始终保持既定,定位手术部1的位置不变。因此,不需要掌握控制定向手术部1所需的位置,因此,根据本发明的手术机器人系统100,不需要使用以往的追加性标记,由此,还能够减小控制所需的演算量。
图17是显示根据本发明的一个实施例,在定位手术用手术机器人系统中,对使手术工具移动及旋转至少五自由度的定位手术部进行控制的方法的流程图。
首先,在步骤S1710中,控制部可以接收代表包括手术目标在内的手术部位的三维图像的第一成像数据。例如,如果参照图2,控制部140可以从存储装置180接收代表手术前拍摄的手术部位的三维图像的成像数据。第一成像数据通过用户界面150而可视化,从而可以用作能够判断手术目标的位置及手术工具的进入位置的资料。通过用户界面150,如果输入手术目标的位置及手术工具的进入位置,则控制部140可以基于输入的手术目标的位置及手术工具的进入位置,控制定位手术部1。
在步骤S1710中,控制部140接收第一成像数据后,在步骤S1720中,拍摄部可以生成代表手术部位外部的三维图像的第二成像数据。例如,拍摄部120可以生成代表手术工具将通过头盖骨进入的位置的三维图像的第二成像数据。根据一个实施例,第二成像数据可以根据利用图案光等的相位迁移方式生成。
通过步骤S1710及S1720准备第一及第二成像数据后,在步骤S1730中,跟踪部可以跟踪附着或接近配置于拍摄部及手术部位的至少一个标记的位置及姿势。例如,如果参照图2,跟踪部130跟踪附着于拍摄部120的标记170,从而能够跟踪拍摄部120的位置及姿势。另外,跟踪部130可以跟踪患者标记174的位置及姿势。另一方面,步骤S1710至S1730是控制部140用于获得定位手术部1控制所需数据的过程,因此,步骤的顺序可以变更,各步骤也可以并列地进行。
如上所述,准备了定位手术部1控制所需的数据后,在步骤S1740中,控制部可以生成用于把坐标从第一成像数据的第一坐标系变换成第二成像数据的第二坐标系的第一坐标变换关系。根据一个实施例,控制部140生成第一坐标变换关系的步骤可以包括以下步骤,即,通过第一成像数据代表的三维图像与第二成像数据代表的三维图像间的图像整合,控制部140生成第一坐标变换关系。根据一个实施例,控制部140可以利用第一成像数据代表的三维图像和第二成像数据代表的三维图像中共同包括的手术部位的至少一部分,执行图像整合。
通过步骤S1740生成第一坐标变换关系后,在步骤S1750中,控制部可以利用第一坐标变换关系和拍摄部及至少一个患者标记的位置及姿势,生成用于把坐标从第一坐标系变换成至少一个标记的第三坐标系的第二坐标变换关系,以及用于把坐标从第三坐标系变换成定位手术部的第四坐标系的第三坐标变换关系。例如,如果参照图12,控制部140可以生成用于把坐标从第一成像数据的第一坐标系1210变换成患者标记174的第三坐标系1220的第二坐标变换关系,以及用于把坐标从患者标记174的第三坐标系1220变换成定位手术部1的第四坐标系1230的第三坐标变换关系。
根据一个实施例,控制部140可以基于拍摄部120的位置及姿势,生成第二坐标变换关系。如果参照图18具体考查,在步骤S1751中,控制部可以基于拍摄部的位置及姿势,生成用于把坐标从第二坐标系变换成拍摄部的第五坐标系的第四坐标变换关系,以及用于把坐标从第五坐标系变换成第三坐标系的第五坐标变换关系。例如,如果参照图13,控制部140可以基于拍摄部120的位置及姿势,生成用于把坐标从第二成像数据的第二坐标系1240变换成拍摄部120的第五坐标系1250的第四坐标变换关系,以及用于把坐标从拍摄部120的第五坐标系1250变换成患者标记174的第三坐标系1220的第五坐标变换关系。
根据一个实施例,第四坐标变换关系可以利用(i)用于把坐标从拍摄部120的光学系基准坐标系变换成拍摄部120的第五坐标系1250的坐标变换关系、(ii)用于把坐标从第二成像数据的第二坐标系1240变换成拍摄部120光学系基准坐标系的坐标变换关系而生成。根据一个实施例,第五坐标变换关系可以利用(i)用于把坐标从拍摄部120的第五坐标系1250变换成跟踪部130的坐标系的坐标变换关系、(ii)用于把坐标从患者标记174的第三坐标系1220变换成跟踪部130的坐标系的坐标变换关系而生成。
第四坐标变换关系及第五坐标变换关系生成后,在步骤S1752中,控制部140可以基于第一坐标变换关系、第四坐标变换关系及第五坐标变换关系,生成第二坐标变换关系。根据一个实施例,这种坐标变换关系可以以坐标变换矩阵的形态表现。因此,第二坐标变换关系可以通过利用了代表生成的第一坐标变换关系的矩阵、代表第四坐标变换关系的矩阵及代表第五坐标变换关系的矩阵的演算而生成。
根据一个实施例,第三坐标变换关系可以利用可利用跟踪部130获得的(i)置于定位手术部1原点的标记的位置及姿势和(ii)至少一个标记(患者标记)的位置及姿势而生成。根据又一实施例,患者标记174附着的位置和定位手术部1的原点位置既定,第三坐标变换关系可以通过利用了这点的几何学演算(机构学演算)而生成。
如上所述,第二坐标变换关系及第三坐标变换关系生成后,在步骤S1760中,控制部可以利用第二坐标变换关系及第三坐标变换关系,控制定位手术部。下面参照图19具体进行具体说明。通过步骤S1710至S1750生成第二坐标变换关系及第三坐标变换关系后,控制部可以在步骤S1761中,通过用户界面使第一成像数据可视化,以便用户可以输入手术目标的位置及手术工具的进入位置。例如,如果参照图2,控制部140可以通过用户界面150,使代表包含手术目标的手术部位的三维图像的第一成像数据可视化。
第一成像数据通过步骤S1761而可视化后,可以通过用户界面150,输出手术目标的位置及手术工具的进入位置,并显示于可视化的图像上。控制部可以在步骤S1762中,把用户能够通过用户界面输入的手术目标的位置及手术工具的进入位置变换成第一坐标系上的坐标。例如,如果参照图2,控制部140可以把用户通过用户界面150输入的手术目标的位置及手术工具的进入位置变换成第一成像数据的第一坐标系1210上的坐标。
如上所述通过用户界面150输入的手术目标的位置及手术工具的进入位置变换成第一坐标系1210上的坐标后,在步骤S1763中,控制部可以利用第二坐标变换关系及第三坐标变换关系,把变换的第一坐标系上的坐标变换成定位手术部的第四坐标系上的坐标。例如,如果参照图12,控制部140可以利用第二坐标变换关系及第三坐标变换关系,把第一成像数据的第一坐标系1210上的手术目标的坐标及手术工具的进入位置的坐标变换成定位手术部1的第四坐标系1230上的坐标。
如上所述,第一成像数据的第一坐标系1210上的手术目标的坐标和手术工具的进入位置的坐标变换成定位手术部1的第四坐标系1230上的坐标后,在步骤S1764中,控制部可以基于变换的第四坐标系上的坐标,决定手术工具的进入姿势。例如,控制部140可以决定手术工具的进入姿势,以便手术工具可以从手术工具的进入位置移动到手术目标的位置。
然后,在步骤S1765中,控制部可以通过移动部使旋转部移动,以便在第四坐标系上,与手术目标的位置对应的坐标位于旋转部的两个旋转轴的交叉点。例如,如果参照图4及5,控制部140可以通过移动部10,使附着于移动部10的旋转部40移动,以便在定位手术部1的第四坐标系1230上,与手术目标的位置对应的坐标位于旋转部40的两个旋转轴43、45的交叉点。
另外,控制部可以在步骤S1766中,通过旋转部使手术工具旋转,以便手术工具具有决定的手术工具的进入姿势。例如,如果参照图5,控制部140可以通过旋转部40,使附着于旋转部40的手术工具50旋转,以便手术工具50具有决定的手术工具50的进入姿势。如上所述,在本发明中,控制部140可以分别独立地控制移动部10及旋转部40。
所述方法通过特定实施例进行了说明,但所述方法也可以在计算机可读的记录介质中,以计算机可读的代码体现。计算机可读的记录介质包括存储可借助于计算机系统而读取的数据的所有种类的记录装置。作为计算机可读的记录介质的示例,有ROM、RAM、CD-ROM、磁带、软盘、光数据存储装置等,另外,还包括以载波(例如通过互联网的传输)的形态体现者。另外,计算机可读的记录介质可以分布于以网络连接的计算机系统,以分布方式存储、运行计算机可读代码。而且,用于体现所述实施例的功能性(functional)程序、代码及代码片段可以由本发明所属技术领域的程序员容易地推论。
在本说明书中,本发明就一部分实施例进行了说明,但本发明所属技术领域的从业者应了解,在不超出本发明的精神及范围的范围内,可以实现多样的修订及变更。另外,这种变形及变更应视为属于本说明书附带的权利要求书。