CN107745822B - 一种无人机侧风着陆控制方法 - Google Patents
一种无人机侧风着陆控制方法 Download PDFInfo
- Publication number
- CN107745822B CN107745822B CN201710852712.XA CN201710852712A CN107745822B CN 107745822 B CN107745822 B CN 107745822B CN 201710852712 A CN201710852712 A CN 201710852712A CN 107745822 B CN107745822 B CN 107745822B
- Authority
- CN
- China
- Prior art keywords
- control
- angle
- deviation
- course
- landing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims abstract description 59
- 238000005096 rolling process Methods 0.000 claims abstract description 16
- 238000012937 correction Methods 0.000 claims abstract description 10
- 238000004422 calculation algorithm Methods 0.000 claims description 11
- 238000012545 processing Methods 0.000 claims description 6
- 238000013461 design Methods 0.000 description 7
- 238000004364 calculation method Methods 0.000 description 4
- 230000000694 effects Effects 0.000 description 4
- 238000004088 simulation Methods 0.000 description 4
- 238000013459 approach Methods 0.000 description 2
- 230000015572 biosynthetic process Effects 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 238000003786 synthesis reaction Methods 0.000 description 2
- RZVHIXYEVGDQDX-UHFFFAOYSA-N 9,10-anthraquinone Chemical compound C1=CC=C2C(=O)C3=CC=CC=C3C(=O)C2=C1 RZVHIXYEVGDQDX-UHFFFAOYSA-N 0.000 description 1
- 230000002411 adverse Effects 0.000 description 1
- 238000009795 derivation Methods 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 230000036544 posture Effects 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
- 238000006467 substitution reaction Methods 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
- 238000012795 verification Methods 0.000 description 1
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64D—EQUIPMENT FOR FITTING IN OR TO AIRCRAFT; FLIGHT SUITS; PARACHUTES; ARRANGEMENT OR MOUNTING OF POWER PLANTS OR PROPULSION TRANSMISSIONS IN AIRCRAFT
- B64D45/00—Aircraft indicators or protectors not otherwise provided for
- B64D45/04—Landing aids; Safety measures to prevent collision with earth's surface
Landscapes
- Engineering & Computer Science (AREA)
- Aviation & Aerospace Engineering (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Abstract
本发明涉及一种无人机侧风着陆控制方法,其包括:建立无人机着陆的纠偏流机动控制,所述纠偏流的机动控制用于减小飞机偏流角βw;在所述纠偏流机动控制中加入航向机动预留控制,用于减小纠偏流机动对飞机侧偏控制的冲击;在所述纠偏流机动控制中加入侧滑角限制,用于防止无人机侧向载荷超限;以及在纠偏机动的横向控制支路中需加入滚转角权限限制,以避免近地滚转纠偏导致机翼擦地。本发明的无人机侧风着陆控制方法在着陆控制过程将侧偏修正与纠偏流机动结合起来,解决了着陆过程的协调控制与纠偏流机动控制的匹配问题,实现滚转姿态受限/侧滑受限条件下的安全着陆,可显著提升无人机侧风着陆过程安全性。
Description
技术领域
本发明属于无人机飞行控制技术领域,尤其涉及一种无人机侧风着陆控制方法。
背景技术
无人机在着陆过程的飞行高度、速度、构型均需要做出较大调整,在着陆近地过程无人机还会受到地效气动、风场切变等影响,因此无人机着陆过程是事故高发的阶段之一。其中着陆风场的侧风分量对着陆过程是一种非常不利的影响,受侧风影响飞机航向直接受到扰动,进而影响到飞机着陆侧偏控制。若采用常规侧滑法着陆,虽然可以保证飞机航向对正跑道,但飞机需要往复调整侧滑与滚转姿态以抵消侧风作用,侧滑角与飞机滚转角的不断调整对飞机着陆航迹控制造成不良扰动。在强侧风条件下,飞机平衡侧风的滚转角有可能超出机翼横滚擦地角限制,从而影响飞行安全。若采用偏流法着陆,虽然可以避免飞机侧滑角与滚转角的往复调整,但偏流角在着陆接地过程会对起落架造成较大侧向冲击,同样会增加侧风着陆风险。本发明采用基于偏流角的侧风着陆策略,提出一种纠偏流控制律构架,可有效提升侧风着陆过程的安全性。
发明内容
本发明的目的是提供一种无人机侧风着陆控制方法,避免了侧滑法侧风着陆导致的横航向往复操纵问题,同时解决了偏流法接地前的纠偏流机动的安全性问题。
为达到上述目的,本发明采用的技术方案是:一种无人机侧风着陆控制方法,其包括
建立无人机着陆的纠偏流机动控制,所述纠偏流的机动控制用于减小飞机偏流角βw;
在所述纠偏流机动控制中加入航向机动预留控制,用于减少减小纠偏流机动对飞机侧偏控制的冲击;
在所述纠偏流机动控制中加入侧滑角限制,用于防止无人机侧向载荷超限;以及
在纠偏机动的横向控制支路中需加入滚转角权限限制,以避免近地滚转纠偏导致机翼擦地。
进一步的,所述纠偏流机动的控制量为航向角。
进一步的,在建立纠偏流机动控制之前,还需建立无人机侧风着陆的限制函数,所述限制参数包括:
主轮交叉角强度限制函数βgear_lim=f(G,Vy),其中G为飞机重量、Vy为接地下沉率;
无人机滚转擦地角限制函数 其中Hbase表示停机状态机翼距地面基本高度,Hrelative表示飞机轮底距机场地面相对高度,l表示飞机翼展长度。
其中Hbase表示停机状态机翼距地面基本高度,Hrelative表示飞机轮底距机场地面相对高度,l表示飞机翼展长度。
进一步的,所述纠偏流机动控制中包括航向角控制外环和偏航角速率控制内环,其中
航向角控制的航向运动微分方程为:

偏航角速率控制的偏航角速率指令ωyc=K_Decrab·(ψc-ψ)。
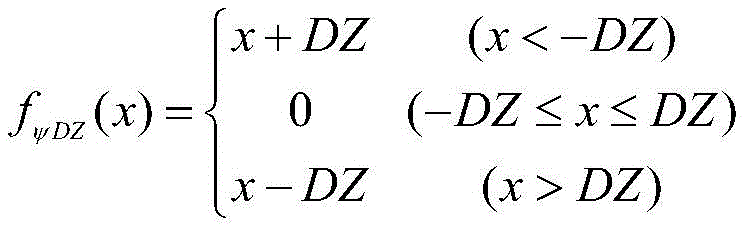
进一步的,加入航向偏差死区后的ωyc指令解算方法为:
ωyc=fψDZ(ψc-ψ)·K_Decrab,
其中航向偏差控制死区范围为[-DZ,DZ],航向机动预留函数fψDZ(x)为:

其中参数DZ满足下列条件:DZ<βgear_lim+(ψc-ψ)·δψ%,δψ%为纠偏流航向控制超调量。
进一步的,为实现侧滑角限制,需要建立偏航角速率指令限制与侧滑角限制函数,
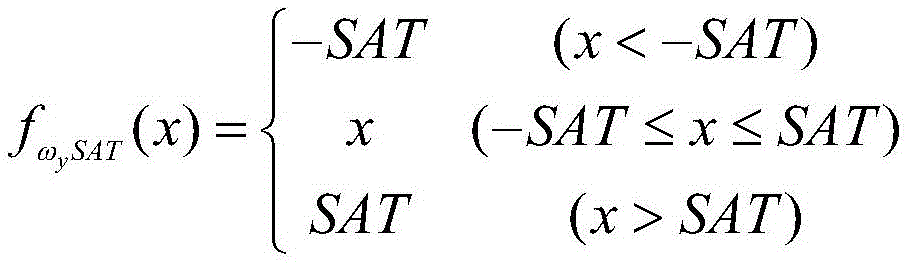
由于偏航角速率指令限制,限幅后的偏航角速率指令ωyc.sat为
其中偏航角速率指令ωyc的限幅函数可表示为:

偏航角速率限制参数SAT根据飞机方向舵航向最大偏航速率控制能力确定;
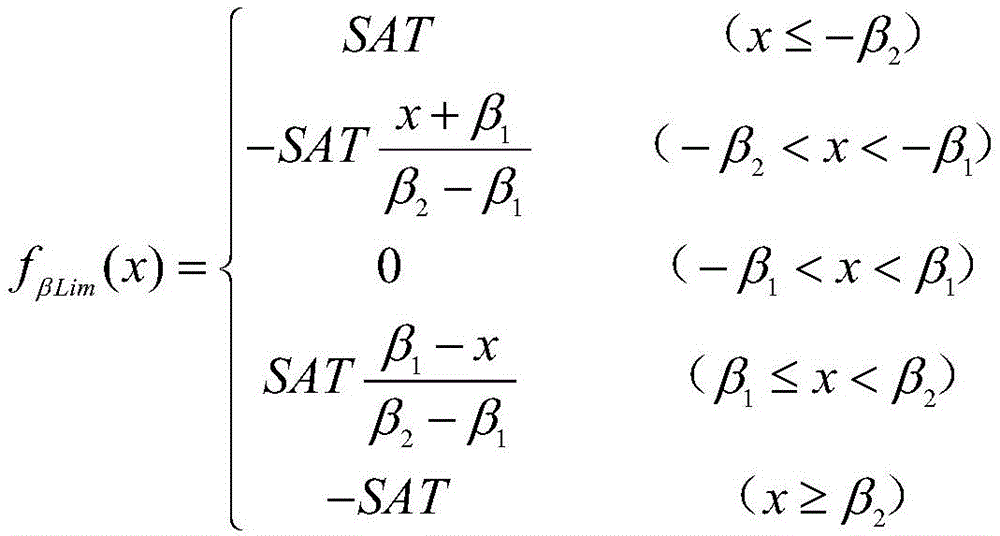
侧滑限制函数受限于飞机侧滑限制值与偏航角速率限制参数SAT两个条件,侧滑限制非线性函数表示如下:

上式中-β1~β1为正常机动侧滑角范围,-β2~β2为最大允许机动侧滑角范围;
经上述算法处理后,得偏航角速率偏差指令△ωyc为:

进一步的,横向支路中滚转角指令限制值根据 确定,滚转角指令限制函数描述如下:
确定,滚转角指令限制函数描述如下:

本发明的无人机侧风着陆控制方法在着陆控制过程将侧偏修正与纠偏流机动结合起来,解决了着陆过程的协调控制与纠偏流机动控制的匹配问题。本发明提出的控制律构架可解决着陆接地过程纠偏流机动与侧偏修正匹配问题,实现滚转姿态受限/侧滑受限条件下的安全着陆,可显著提升无人机侧风着陆过程安全性。
附图说明
此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本发明的实施例,并与说明书一起用于解释本发明的原理。
图1是本发明中侧风条件下飞机偏流法着陆示意图;
图2是本发明的纠偏流控制律结构图;
图3是本发明侧风着陆完整控制律构架;
图4是本发明侧风着陆典型剖面图;
图5是现有技术的侧风着陆实例与本发明的方法对比仿真结果。
具体实施方式
为使本发明实施的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行更加详细的描述。
本发明提出了无人机侧风着陆控制方法,适用于大翼展无人机,在飞机着陆控制过程将侧偏修正与纠偏流机动结合起来,解决了着陆过程的协调控制与纠偏流机动控制的匹配问题。
本发明的无人机侧风着陆控制方法可包括如下步骤:
一:建立着陆参数限制函数
侧风着陆主要的限制函数主要包括起主轮交叉角强度限制函数与飞机滚转擦地角限制函数。
主轮交叉角定义为地速方向与主轮夹角,其限制可运用限制函数βgear_lim=f(G,Vy)描述,交叉角限制值βgear_lim随飞机重量G、接地下沉率Vy相关,具体参数可根据起落架强度设计结果给出。
飞机滚转擦地限制角γflare_lim可运用函数 计算得到,Hbase表示停机状态机翼距地面基本高度,Hrelative表示飞机轮底距机场地面相对高度,l表示飞机翼展长度。在飞机翼展、起落架布局确定条件下,飞机轮底相对机场地面高度Hrelative越高,滚转擦地限制角越大。
计算得到,Hbase表示停机状态机翼距地面基本高度,Hrelative表示飞机轮底距机场地面相对高度,l表示飞机翼展长度。在飞机翼展、起落架布局确定条件下,飞机轮底相对机场地面高度Hrelative越高,滚转擦地限制角越大。
二:纠偏流控制律设计
本发明在飞机着陆初期采用偏流法完成横航向控制,偏流法着陆示意图如图1所示。若飞机受左侧风Vw扰动,偏流法通过指令侧滑角0°实现飞机机头始终指向来流方向,此时飞机航向与地速方向形成偏流角βw。在飞机着陆接地前完成纠偏流机动,纠偏流机动的控制目标是减小飞机偏流角,以降低偏流着陆对起落架的冲击。本发明中将纠偏流机动的控制量定为航向角,在消除航向偏差的同时偏流角可得到有效减小,这样的设计可同时减小航向偏离对着陆滑跑侧偏控制的影响。
纠偏流控制律由航向角控制外环和偏航角速率控制内环构成,在航向运用方向舵实现偏航角的直接控制。根据飞机航向力矩方程可知

若采用方向舵δy为航向主控量,副翼δx配合协调控制,那么可实现偏航角速率ωy的有效控制。上式中ωy表示偏航角速率, 表示偏航力矩对侧滑的大导数,β表示侧滑角,
表示偏航力矩对侧滑的大导数,β表示侧滑角, 表示偏航力矩对滚转角速率的大导数,ωx表示滚转角速率,
表示偏航力矩对滚转角速率的大导数,ωx表示滚转角速率, 表示偏航力矩对偏航角速率的大导数,ωy表示偏航角速率,
表示偏航力矩对偏航角速率的大导数,ωy表示偏航角速率, 表示副翼产生的偏航力矩大导数,δx表示副翼偏度,
表示副翼产生的偏航力矩大导数,δx表示副翼偏度, 表示方向舵产生的偏航力矩大导数,δy表示方向舵偏度,△Myconst表示航向不对称力矩。
表示方向舵产生的偏航力矩大导数,δy表示方向舵偏度,△Myconst表示航向不对称力矩。
根据航向运动微分方程可知:
当滚转角γ和俯仰角θ较小时,偏航角速率ωy近似为偏航角的微分。上式中ψ表示航向角,ωz表示俯仰角速率。
这样控制系统可以构成“偏航角—偏航角速率—偏航控制力矩”的控制构架。根据上述推导,可实现 的典型控制构架,进而完成控制律各回路设计。
的典型控制构架,进而完成控制律各回路设计。
纠偏流控制律组成机理框图如图2所示,横向控制根据侧偏等信息解算出横向操纵力矩Mxc完成水平面轨迹控制;航向控制根据给定航向指令ψc(跑道着陆航向)与航向反馈ψ的偏差,通过航向偏差比例增益K_Decrab解算得到偏航角速率指令ωyc,偏航角速率指令ωyc与偏航角速率ωy反馈的偏差经过无静差控制律(例如比例积分PI算法),最终形成航向操纵力矩指令Myc,其算法描述为:
上式中偏航角速率指令ωyc=K_Decrab·(ψc-ψ),KP为比例增益,KI为积分增益,s为微分算子;
横、航向操纵力矩指令最终经过效能分配算法得到副翼指令δx与方向舵指令δy。
三:航向机动预留算法
工程实际设计中,全权限的纠偏流机动可能导致方向舵用量较大、侧滑较大的情况,侧滑长时间的作用会带来附加的侧向偏差扰动。考虑到主起落架交叉角限制范围,航向偏差在安全范围内可以不主动纠偏流,使飞机带着安全的偏流角完成着陆接地,以此减小纠偏流机动对飞机侧偏控制的冲击。加入航向偏差死区后的ωyc指令解算方法为:ωyc=fψDZ(ψc-ψ)·K_Decrab其中航向偏差控制死区范围为[-DZ,DZ],航向机动预留函数fψDZ(x)可表示为:

其中参数DZ的选取需要综合考虑起落架交叉角限制与航向控制超调,DZ选取需满足如下基本条件:DZ<βgear_lim+(ψc-ψ)·δψ%
上式中δψ%为纠偏流航向控制超调量。
四:纠偏流机动侧滑限制
整个纠偏流机动过程侧滑角处于开环状态,考虑到飞机进入大侧滑状态气动特性将出现不同程度的恶化,同时大侧滑角状态可能导致飞机侧向载荷超限,因此纠偏流控制律中需要加入侧滑角限制作为重要的保护算法。为实现侧滑角限制,需要完成偏航角速率指令限制与侧滑角限制函数的设计。
考虑偏航角速率指令限制,限幅后的偏航角速率指令ωyc.sat为
其中偏航角速率指令ωyc的限幅函数可表示为:

偏航角速率限制参数SAT可根据飞机方向舵航向最大偏航速率控制能力确定。
侧滑限制函数需综合考虑飞机侧滑限制值与偏航角速率限制参数SAT两个条件,侧滑限制非线性函数表示如下:

上式中-β1~β1为正常机动侧滑角范围,-β2~β2为最大允许机动侧滑角范围。经上述算法处理后,偏航角速率偏差指令△ωyc为:

五:滚转受限条件的侧偏控制律设计
随着飞机高度的减小,受飞机滚转擦地角限制,飞机可用滚转角权限随之变小。在纠偏横向控制支路中需加入滚转角权限限制,以避免近地滚转纠偏导致机翼擦地。控制律中横向支路中滚转角指令限制值根据 确定,滚转角指令限制函数描述如下:
确定,滚转角指令限制函数描述如下:

整个控制律的详细构架参见图3所示,着陆控制由铅垂面轨迹控制、水平面轨迹控制、偏航支路控制三部分组成。铅垂面控制完成着陆下滑道跟踪与拉平控制。水平面轨迹控制完成侧偏控制,实现飞机水平面轨迹跟踪功能,控制律根据侧偏解算得到地速方向增量指令ψVdc,与航向角指令ψc与地速方向ψVd综合后经航向比例增益Kψ后得到指令滚转角。考虑到大翼展飞机在近地过程不允许出现较大滚转角,此处近地滚转角限制值γLim简化为3°恒值。经过限幅处理的滚转角指令γc与滚转角γ综合后经过滚转比例增益Kγ处理后得到滚转角速率指令ωxc。滚转角速率指令ωxc与滚转角速率ωx综合后经比例积分算法解算后得到横向控制力矩指令Mxc。偏航支路由空中侧滑指令与纠偏流两个模态组成。空中飞行航向控制律由指令侧滑βc与侧滑角β综合后经过比例积分PI控制器解算得到偏航控制力矩指令Myc,控制飞机无侧滑协调飞行。在飞机接地前航向切换至纠偏流控制律,航向角指令ψc与航向ψ综合后经航向机动预留算法处理,通过比例增益K_Decrab后得到偏航角速率指令ωyc;考虑飞机实际偏航角速率控制能力,限幅后得到偏航角速率实际指令ωyc.sat,与偏航角速率反馈ωy以及侧滑限制支路综合后得到偏航角速率指令偏差△ωyc,经过比例积分PI算法解算后得到航向控制力矩指令Myc。
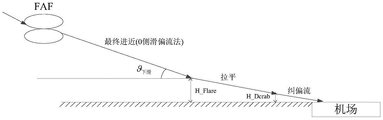
飞机整个侧风着陆按照飞机相对机场高度划分为三个阶段,铅垂面轨迹示意如图4所示。在最终进近阶段,铅垂面完成下滑道精确跟踪控制,水平面完成侧偏精确跟踪控制,偏航支路完成0侧滑控制;拉平阶段铅垂面完成拉平控制,降低飞机下沉率,水平面完成侧偏精确跟踪控制,航支路完成0侧滑控制;纠偏流阶段铅垂面完成拉平控制,降低飞机下沉率,水平面完成滚转角受限条件下的侧偏控制,偏航支路完成纠偏流机动,使飞机航向对正跑道中线。
如图5所示即为偏流法侧风着陆与侧滑法侧风着陆仿真结果对比,由仿真对比结果可知:本发明的控制方法在最终进近过程中始终保持侧滑角在0°附近,滚转角受扰较小,侧风条件下不需要用附加滚转角平衡侧力;接地前纠偏流机动快速有效,飞机接地时偏流角基本消除,后续地面滑行没有出现明显的侧偏扰动。侧滑法飞行通过建立侧滑角来保证飞机航向对正跑道,飞机需要右滚平衡侧滑导致的侧力;在拉平时为避免机翼擦地,减小滚转角至3°,此时3°滚转角不足以平衡侧风影响,飞机向左偏离,接地后的附加航向偏差、侧向偏差导致飞机滑跑出现大幅度往复调整。由对比仿真可知,本发明的“偏流法+纠偏流机动”控制方法可有效提升大翼展无人机侧风着陆的安全性。
本发明提供无人机侧风着陆控制方法在飞机着陆控制过程将侧偏修正与纠偏流机动结合起来,解决了着陆过程的协调控制与纠偏流机动控制的匹配问题。本发明提出的控制律构架可解决着陆接地过程纠偏流机动与侧偏修正匹配问题,实现滚转姿态受限/侧滑受限条件下的安全着陆。经试飞验证,该套技术可显著提升无人机侧风着陆过程安全性。
以上所述,仅为本发明的最优具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以所述权利要求的保护范围为准。
Claims (5)
1.一种无人机侧风着陆控制方法,其特征在于,所述无人机侧风着陆控制方法包括
建立无人机侧风着陆的限制函数,所述限制函数包括:
主轮交叉角强度限制函数βgear_lim=f(G,Vy),其中G为飞机重量、Vy为接地下沉率;
无人机滚转擦地角限制函数 其中Hbase表示停机状态机翼距地面基本高度,Hrelative表示飞机轮底距机场地面相对高度,l表示飞机翼展长度;
其中Hbase表示停机状态机翼距地面基本高度,Hrelative表示飞机轮底距机场地面相对高度,l表示飞机翼展长度;
建立控制量为航向角的无人机着陆的纠偏流机动控制,所述纠偏流的机动控制用于减小飞机偏流角βw;
在所述纠偏流机动控制中加入航向机动预留控制,用于减小纠偏流机动对飞机侧偏控制的冲击;
在所述纠偏流机动控制中加入侧滑角限制,用于防止无人机侧向载荷超限;以及
在纠偏流机动的横向控制支路中需加入滚转角权限限制,以避免近地滚转纠偏导致机翼擦地。
2.根据权利要求1所述的无人机侧风着陆控制方法,其特征在于,所述纠偏流机动控制中包括航向角控制外环和偏航角速率控制内环,其中
航向角控制的航向运动微分方程为:

偏航角速率控制的偏航角速率指令ωyc=K_Decrab·(ψc-ψ),ψc为航向角指令,K_Decrab为航向偏差比例增益。
3.根据权利要求2所述的无人机侧风着陆控制方法,其特征在于,加入航向偏差死区后的ωyc指令解算方法为:ωyc=fψDZ(ψc-ψ)·K_Decrab,其中航向偏差控制死区范围为[-DZ,DZ],航向机动预留函数fψDZ(x)为:
其中参数DZ满足下列条件:DZ<βgear_lim+(ψc-ψ)·δψ%,δψ%为纠偏流航向控制超调量,K_Decrab为纠偏流控制比例增益,βgear_Lim为起落架交叉角限制值,ψc为航向角指令,ψ为航向角。
4.根据权利要求3所述的无人机侧风着陆控制方法,其特征在于,为实现侧滑角限制,需要建立偏航角速率指令限制与侧滑角限制函数,
由于偏航角速率指令限制,限幅后的偏航角速率指令ωyc.sat为
其中偏航角速率指令ωyc的限幅函数可表示为:
偏航角速率限制参数SAT根据飞机方向舵航向最大偏航速率控制能力确定;
侧滑限制函数受限于飞机侧滑限制值与偏航角速率限制参数SAT两个条件,侧滑限制非线性函数表示如下:
上式中-β1~β1为正常机动侧滑角范围,-β2~β2为最大允许机动侧滑角范围;
经上述算法处理后,得偏航角速率偏差指令△ωyc为:

上式中,β为侧滑角,ωy为偏航角速率, fψDZ为航向机动预留函数,ψc为航向角指令,ψ为航向角。
fψDZ为航向机动预留函数,ψc为航向角指令,ψ为航向角。
5.根据权利要求4所述的无人机侧风着陆控制方法,其特征在于,横向支路中滚转角指令限制值根据 确定,滚转角指令限制函数描述如下:
确定,滚转角指令限制函数描述如下:

Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201710852712.XA CN107745822B (zh) | 2017-09-20 | 2017-09-20 | 一种无人机侧风着陆控制方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201710852712.XA CN107745822B (zh) | 2017-09-20 | 2017-09-20 | 一种无人机侧风着陆控制方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN107745822A CN107745822A (zh) | 2018-03-02 |
| CN107745822B true CN107745822B (zh) | 2020-12-18 |
Family
ID=61254586
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201710852712.XA Active CN107745822B (zh) | 2017-09-20 | 2017-09-20 | 一种无人机侧风着陆控制方法 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN107745822B (zh) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110096070B (zh) * | 2019-05-17 | 2021-08-03 | 成都飞机工业(集团)有限责任公司 | 一种单边挂弹着陆的横向控制方法 |
| CN111007869A (zh) * | 2019-11-20 | 2020-04-14 | 中国航空工业集团公司沈阳飞机设计研究所 | 一种给定航迹方位角自动控制方法 |
| CN111309041B (zh) * | 2020-03-05 | 2022-05-10 | 成都飞机工业(集团)有限责任公司 | 一种弹射起飞拉起控制方法 |
| CN112947527B (zh) * | 2021-03-15 | 2024-11-22 | 中国商用飞机有限责任公司 | 一种用于飞机的飞行控制方法和装置 |
| CN114675663A (zh) * | 2022-03-18 | 2022-06-28 | 成都飞机工业(集团)有限责任公司 | 一种侧风环境下无人机着陆的规划及控制方法 |
| CN115167494B (zh) * | 2022-08-05 | 2024-11-01 | 烟台大学 | 一种无人机的侧滑与倾斜复合转弯控制方法 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB1561650A (en) * | 1976-01-29 | 1980-02-27 | Sperry Rand Corp | Aircraft control system |
| CN100568141C (zh) * | 2008-03-20 | 2009-12-09 | 北京航空航天大学 | 一种无人机滚转改平控制方法 |
| CN101763116B (zh) * | 2008-12-24 | 2012-12-12 | 中国科学院自动化研究所 | 一种基于侧向导引的抗侧风着陆航迹跟踪控制方法 |
| FR2948468B1 (fr) * | 2009-07-23 | 2011-09-16 | Airbus Operations Sas | Procede et dispositif d'aide au controle lateral d'aeronef lors d'une phase d'approche |
| CN104656661B (zh) * | 2015-01-23 | 2017-04-19 | 南京航空航天大学 | 一种公务机下降着陆控制方法 |
| CN105159308B (zh) * | 2015-08-28 | 2017-12-15 | 北京控制工程研究所 | 一种可重复使用飞行器着陆段制导与控制律一体化耦合设计方法 |
-
2017
- 2017-09-20 CN CN201710852712.XA patent/CN107745822B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| CN107745822A (zh) | 2018-03-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN107745822B (zh) | 一种无人机侧风着陆控制方法 | |
| CN111610780B (zh) | 一种自动驾驶车路径跟踪控制方法及其装置 | |
| US6722610B1 (en) | Method, system, and computer program product for controlling maneuverable wheels on a vehicle | |
| CN111123967B (zh) | 一种基于自适应动态逆的固定翼无人机着舰控制方法 | |
| Azinheira et al. | A backstepping controller for path‐tracking of an underactuated autonomous airship | |
| CN105159308B (zh) | 一种可重复使用飞行器着陆段制导与控制律一体化耦合设计方法 | |
| CN109253730B (zh) | 可重复使用运载器末端能量管理段的三维轨迹在线规划方法及系统 | |
| CN115933733B (zh) | 一种固定翼无人机纵向高度速度解耦非线性控制方法 | |
| CN112148029B (zh) | 一种滑跑起降型无人机无动力全自动迫降方法 | |
| CN105857586B (zh) | 用于控制可转向起落架的方法和设备 | |
| CN212965864U (zh) | 一种常规布局通用型无人机全自动离地起飞控制系统 | |
| CN108369106A (zh) | 失控预防以及恢复飞行控制器 | |
| CN101264797A (zh) | 一种无人机滚转改平控制方法 | |
| CN113093774A (zh) | 无人机滑跑控制方法 | |
| CN107544530A (zh) | 一种无人机自主驶入驶出控制方法 | |
| CN116339140B (zh) | 一种基于瞬时自抗扰和自适应动态逆的复合容错控制方法 | |
| CN106990790A (zh) | 一种抗饱和多旋翼飞行器控制方法 | |
| CN101256412A (zh) | 一种无人机发动机意外停车下的自动归航控制方法 | |
| CN108089593A (zh) | 一种无人直升机航向补偿航线过渡的方法 | |
| CN114675663A (zh) | 一种侧风环境下无人机着陆的规划及控制方法 | |
| CN115129084A (zh) | 一种飞翼布局无人机大侧偏着陆纠偏控制方法 | |
| CN109343551A (zh) | 一种旋翼机协调转弯控制方法及系统 | |
| CN104656659B (zh) | 舰载机滑跃起飞自动飞行控制方法 | |
| CN117148855A (zh) | 一种面向飞机编队机动飞行的飞控指令生成方法 | |
| CN116300988A (zh) | 一种基于分数阶滑模的先进布局无人机抗干扰控制策略 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |