CN106228527B - 利用手动和半自动技术校准显示系统的系统和方法 - Google Patents
利用手动和半自动技术校准显示系统的系统和方法 Download PDFInfo
- Publication number
- CN106228527B CN106228527B CN201610816106.8A CN201610816106A CN106228527B CN 106228527 B CN106228527 B CN 106228527B CN 201610816106 A CN201610816106 A CN 201610816106A CN 106228527 B CN106228527 B CN 106228527B
- Authority
- CN
- China
- Prior art keywords
- screen
- projector
- corresponding points
- mapping
- points
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims abstract description 85
- 238000013507 mapping Methods 0.000 claims description 99
- 239000011159 matrix material Substances 0.000 claims description 11
- 239000003086 colorant Substances 0.000 claims description 7
- 238000007670 refining Methods 0.000 claims 2
- 230000008569 process Effects 0.000 abstract description 21
- 230000007246 mechanism Effects 0.000 description 12
- 238000006073 displacement reaction Methods 0.000 description 8
- 238000012937 correction Methods 0.000 description 6
- 230000003287 optical effect Effects 0.000 description 6
- 239000000872 buffer Substances 0.000 description 5
- 238000012986 modification Methods 0.000 description 5
- 230000004048 modification Effects 0.000 description 5
- 238000012545 processing Methods 0.000 description 5
- 238000012935 Averaging Methods 0.000 description 3
- 238000010586 diagram Methods 0.000 description 3
- 238000002347 injection Methods 0.000 description 3
- 239000007924 injection Substances 0.000 description 3
- 238000002156 mixing Methods 0.000 description 3
- 230000010287 polarization Effects 0.000 description 3
- 238000013459 approach Methods 0.000 description 2
- 230000008859 change Effects 0.000 description 2
- 238000004891 communication Methods 0.000 description 2
- 241000226585 Antennaria plantaginifolia Species 0.000 description 1
- 238000007792 addition Methods 0.000 description 1
- 230000009286 beneficial effect Effects 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 230000007812 deficiency Effects 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- HAKMAMKAFTZXOZ-UHFFFAOYSA-N dioctoxyphosphorylbenzene Chemical compound CCCCCCCCOP(=O)(OCCCCCCCC)C1=CC=CC=C1 HAKMAMKAFTZXOZ-UHFFFAOYSA-N 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 238000003702 image correction Methods 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 238000004088 simulation Methods 0.000 description 1
- 230000001131 transforming effect Effects 0.000 description 1
- 238000013519 translation Methods 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
Images




Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T5/00—Image enhancement or restoration
- G06T5/80—Geometric correction
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B21/00—Projectors or projection-type viewers; Accessories therefor
- G03B21/14—Details
- G03B21/147—Optical correction of image distortions, e.g. keystone
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N9/00—Details of colour television systems
- H04N9/12—Picture reproducers
- H04N9/31—Projection devices for colour picture display, e.g. using electronic spatial light modulators [ESLM]
- H04N9/3141—Constructional details thereof
- H04N9/3147—Multi-projection systems
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N9/00—Details of colour television systems
- H04N9/12—Picture reproducers
- H04N9/31—Projection devices for colour picture display, e.g. using electronic spatial light modulators [ESLM]
- H04N9/3179—Video signal processing therefor
- H04N9/3182—Colour adjustment, e.g. white balance, shading or gamut
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N9/00—Details of colour television systems
- H04N9/12—Picture reproducers
- H04N9/31—Projection devices for colour picture display, e.g. using electronic spatial light modulators [ESLM]
- H04N9/3179—Video signal processing therefor
- H04N9/3185—Geometric adjustment, e.g. keystone or convergence
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N9/00—Details of colour television systems
- H04N9/12—Picture reproducers
- H04N9/31—Projection devices for colour picture display, e.g. using electronic spatial light modulators [ESLM]
- H04N9/3197—Projection devices for colour picture display, e.g. using electronic spatial light modulators [ESLM] using light modulating optical valves
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Physics & Mathematics (AREA)
- Geometry (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Transforming Electric Information Into Light Information (AREA)
- Controls And Circuits For Display Device (AREA)
- Projection Apparatus (AREA)
- Video Image Reproduction Devices For Color Tv Systems (AREA)
Abstract
本发明提供了一种降低手动校准过程的枯燥性和所需精确度的系统和方法。用户选择多台投影仪或投影仪的多个组件之间的对应点来形成一个共同坐标系。利用显示系统的模型和投影仪,可快速映射所述共同坐标系至整个显示器。该过程避免了测量屏幕点的需要,并允许用户移动数量大幅减少的点。另外,本发明允许在手动校准技术中引入机器视觉类型的算法以提高性能。这通过将显示器的模型引入手动校准过程中克服了现有系统的繁琐,只需在每台投影仪上选择少量的点,且避免了选择需精确测量的屏幕点。相反地该系统找出投影仪之间的对应点,允许投影仪映射至一个共同坐标系并将此共同坐标系快速变形至屏幕。
Description
分案申请
本申请为申请号201180064209.9、申请日2011年11月15日、题为“利用手动和半自动技术校准显示系统的系统和方法”的分案申请。
技术领域
本发明涉及到显示器,且重点在于但不限于多投影显示系统。更特别地,本发明涉及到这种显示器和显示系统的校准。
背景技术
人们喜欢观看环绕他们的影像。尺寸、亮度、分辨率、对比度、3D以及许多其他特点都吸引了观众的注意。创建一个显示系统的目标是为观众创建可能的最佳体验。创建最佳体验往往意味着优化显示质量。质量因素包括但不限于几何精度、色彩准确度、对比度、分辨率和分散伪影的自由度(freedom from distracting artifacts)和其他通常有助于使影像性质令人赏心悦目的性能特性。这些因素可能也包括允许显示的数字影像准确地呈现原始数字影像或自然界中发现的影像。为获得可能的最佳用户体验和/或显示质量,需要通过矫正影像信息并调试显示系统的操作点来修正显示屏产生的影像中的一些不准确之处。
显示系统由一个或多个显示单元组成。显示单元可为各种不同的类型,包括但不限于平板显示器、投影仪、发光显示器、电子墨水显示器等,它们可为平面或弯曲的。这种显示器的实例列举在通常分配的美国公布专利申请第2008/0246781A1号、名为“通过使用光反馈的显示调节和图像处理提供改善的显示质量的系统和方法(SYSTEM AND METHOD FORPROVIDING IMPROVED DISPLAY QUALITY BY DISPLAY ADJUSTMENT AND IMAGE PROCESSINGUSING OPTICAL FEEDBACK)”(要求美国分案申请序列第60/895,070号的优先权)和美国专利申请序列第12/049,267、名为“映射函数注入系统和方法(SYSTEM AND METHOD FORINJECTION OF MAPPING FUNCTIONS)”中,其公开内容作为有用的背景信息通过引用并入此文。每种这些类型的显示单元可能都有不同的伪影。
例如平板类型的显示器往往因其面板内的颜色和亮度光斑,以及面板上的色彩和亮度差而受到诟病。它们也具有因不同的输入-输出曲线造成的缺陷。例如,两个或多个独立的显示器能够非常相似地显示低亮度的灰度,但高亮度的灰度显示在不同的面板上变化可能会很大。带来麻烦的几何问题也可能是由面板遮光板遮挡度、多个面板未对齐、对面板内非常规显示形状的需求、多个面板在形状上(例如圆柱形)的对齐,等等引起的。
基于投射的显示器会有几何失真(有时在单颜色通道上),这往往是由于投影仪内有瑕疵的光学器件造成的。它们还因投影仪内或投影仪上的亮度变化、彩色光泽、投影仪上颜色的不匹配、黑度变化、不同的输入-输出曲线等受到诟病,
对于3D影像的显示器来说,往往是将不同的影像分别呈现给右眼和左眼。完成该项任务的方法包括利用时间来交替传递到每只眼睛的影像、利用光的属性如偏振或波长来选择哪只眼睛将接收哪些特定的影像、基于眼睛的空间位置利用光学器件尝试向每只眼睛传送不同的影像等。对于3D影像来说,因其使用标准影像,结果会存在几何伪影、颜色和亮度伪影,以及打算传递给每只眼睛的影像的潜在的不同伪影。
对系统进行的修正可出现在影像显示处理链中的多个阶段中。在一个示例中,修正可发生在创建数字信号时,如在并入本文的“映射函数注入系统和方法(SYSTEM ANDMETHOD FOR INJECTION OF MAPPING FUNCTIONS)”中详细描述的那样。有关投影仪或中间变形盒如OMTE参数的一个特别的实例得到图示和详述,如在并入本文的题为“通过使用光反馈的显示调节和图像处理提供改善的显示质量的系统和方法(SYSTEM AND METHOD FORPROVIDING IMPROVED DISPLAY QUALITY BY DISPLAY ADJUSTMENT AND IMAGE PROCESSINGUSING OPTICAL FEEDBACK)”的美国专利申请中详细描述的那样。
于此考虑的修正类型通常包括对至屏幕上的图像的扭曲变形。如果利用投影仪,一个此类修正需要穿过投影仪混合图像,以便使一个由多台投影仪叠加的区域的总亮度与显示的剩余部分的亮度相似。也可以考虑在显示单元上和在显示单元内都对颜色和亮度变化进行修正。该讨论重点在于几何形状的变化。许多类型的影像可在屏幕上显示。有时其内容实际上为一可混合和变形至屏幕上的矩形影像。有时其内容由三维场景的许多视图组成,其中每个显示单元可能均具有三维场景的不同视图,而且每个显示单元均拉伸和扭曲视图,以便作为结果的显示系统看起来好像显示了整个系统的一个非常大的视图。在这种情况下,系统往往利用三维渲染引擎如OpenGL或DirectX对内容进行渲染。
手动几何校准是获得用户指定要在显示器上显示的影像的几何修正(变形)的过程。对于手动几何校准,本领域的现有技术通常涉及大量精度上的应用,实现这些往往是繁琐乏味的。
在常规实施中手动校准投影仪的最常用的方法为在平面屏幕上完美校准。对于l×N的投影机阵列来说,例如,这些投影机被设置成使得投射的影像没有相对的垂直偏移和已知的水平偏移。在这种情况下,从输入影像至屏幕的映射通常是很简单直接的。对于水平设置来说,影像的左侧部分至左投影仪;下一台投影仪显示一些相同的像素(对于重叠区域来说),然后所述像素直接至右侧。输入影像至屏幕的映射因此为一恒等变形,影像的各个部分分发到每台投影仪。在这种情况下,精度和繁琐在于两点。第一,必须对投影仪校准-这是一项具有挑战性和困难的过程。第二,从投影仪至屏幕的传递函数必须十分接近于比例映射(scale mapping)。在映射中要达到该精确度通常需要配有昂贵的光学元件的投影仪。
如果投影仪没有精确地对准,或其映射不具有完美的比例因子,手动校准的第二种方法涉及移动大量的点以指出应该应用于每台投影仪的修正。通常这些点是通过点击设备如鼠标选定的。两个标准示例包括应用如WatchoutTM(可从瑞典林雪平市的Dataton公司获得)和eWarpDesignerTM(可从加拿大安大略省里士满山的Flexible Picture Systems公司获得)的使用。在每个这些典型的应用中,用户都具有以在投影仪上均匀地隔开开始的点的网格。这些点被移动以表明被发送至投影仪的影像实际上应该显示在投影仪上的位置;也就是说,所述点表示被投影到屏幕上的输入影像的变形。通常情况下,必须移动且一般必须精确地移动大约7乘9的点的网格(通常是在eWarpDesigner内完成的),每台投影仪63个点。这项工作是乏味的。通常,为了准确地完成此项工作,需要预测量屏幕并在屏幕上放置小圆点,这样用户就能够将投影仪上的点移至屏幕上的正确位置,这样影像将会正确地映射到屏幕上。精度往往是必需的,尤其是在重叠区域内,这是因为在重叠区域内小小的未对准在显示最终影像时由于阴影效果会变得很显眼。总的来说,缺乏精确性能够导致伪影,例如一个在显示系统上移动的影像,随着其移动收缩和扩大,或略微向上和向下振荡。
手动校准的另一个实例为来自3D Perception(挪威)的应用。在与其compactUTM变形盒一起推出的软件中,用户可获得具有每台投影仪在3D空间内的位置、其是如何投射影像的模型和屏幕的一个模型。起始点是非常有帮助的,因为其提供系统变形的初步估算,但是再一次,为了完善模型以实现多台投影仪之间良好的校准,必须分别移动每台投影仪上的多个点来修正变形以实现投影仪间的匹配。
这些类型的用于修改和更新变形的手动方法通常不会利用屏幕的形状,或可模拟显示单元的事实-例如具有径向畸变的作为一个4×3投影矩阵的投影仪。而且,它们不使用任何在投影仪之间形成约束的算法。实际上,这些方法不使用像那些用在机器视觉(被创建用于有效地模拟3D场景)中的数学工具和那些其几何特性由光学原理控制的对象。此外,这些方法通常试图不依赖于屏幕使每台投影仪变形。它们不会利用在重叠区域中选择的点试图并映射投影仪至一共同的坐标系,且然后采用此共同坐标系并使其变形至屏幕上。本专利的目的是利用刚才所述的信息来降低系统的几何手动校准中通常所需的繁琐性和精度。
发明内容
本发明通过降低手动校准过程的枯燥性和精度要求克服了现有技术的不足。用户选择多台投影仪之间的对应点和/或单个投影仪的多个组件之间的对应点,允许其形成一个穿过整个投影仪系统的共同坐标系。利用显示系统的模型和投影仪,用户能够快速地映射共同的坐标系至整个显示屏。在该过程中,说明性的实施例避免了需要在屏幕上精确地测量点,且在校准过程中一般只需要移动较少的点。
或者这样说,本发明的目的是引入机器视觉类型的算法至手动校准技术中,以更快、更轻松、少繁琐地实施。通过将显示系统的模型引入到手动校准过程中,所述系统和方法从而克服了现有技术的繁琐性。其允许用户在每台投影仪上选择相对较少的点,并避免了在屏幕上选择精确测量的点。相反,所述系统和方法在多台投影仪之间找出对应点,这允许将投影仪映射至一个共同的(世界)坐标系上,且然后允许用户快速地将共同坐标系扭曲变形至屏幕上。
附图说明
下文将参考附图对本发明进行描述,其中:
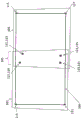
图1为根据本发明的一个一般性实施例的示例性手动校准显示系统的方框图;
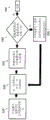
图2为表明获得手动几何校准的步骤的流程图;
图3为显示了获得从一台投影仪到另一台的映射的步骤的流程图;
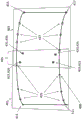
图4为一个典型的利用柱面屏幕的手动校准显示系统的方框图;
图5为一个显示了一个特征的横截面的实例的图像,其中该特征在屏幕上显示以实现子像素校准精度;
图6为显示了当提前知道投影仪的模型时获得手动校准的步骤的流程图;
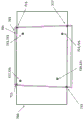
图7为根据本发明实施例的一个用于在投影仪内的多种颜色之间测量失真的带有手动校准的示例性显示系统的方框图;和
图8为显示了一个手动校准程序的步骤的流程图,其中从投影仪至共同坐标系的映射和从坐标系至屏幕的映射同时更新。
具体实施方式
Ⅰ.说明性的实施例
图1所示为从两台投影仪投射的两个影像落在平面屏幕区域100内的轮廓101和103。所述轮廓不需要一定为矩形,图中所绘以梯形作为示例。在另外的实例中明显可设想到各种不同的几何形状。在重叠区域105,两台投影仪的投影都重叠在屏幕100上。在所述区域105,在每台投影仪上都选择若干个位置。用户可利用例如鼠标在每台投影仪上在一个重叠的位置内点击来完成这项任务。每个“X”表示由用户或投影仪101上的其它机构选定的一个位置,且每个“O”表示在投影仪103上选定的位置。在重叠区域105内显示有四个X-O对应点对:X(127)对应O(129)、X(131)对应O(133)、X(119)对应O(121)和X(123)对应O(125)。这些对应点对能够用于形成从一台投影仪至另一台投影仪的映射。四个对足以形成投影仪之间的单应矩阵。对于平面屏幕来说,单应矩阵对于投影仪之间的映射来说是良好的选择,因为它相当准确地表现了从一台投影仪至另一台投影仪的映射。其他映射设置和实施方式也是可行的,包括基于双线性映射、径向基函数、二次曲线、样条函数、三角形网格等的映射。映射一般应包括一定量的固有平滑度,或是以某些方式来限制映射以构建平滑的表现,以便使通常期望的从投影仪的输入影像至投射影像的平滑映射具有代表性。某些映射(如双线性映射)不需要一定要有四个对应点,而其他类型的映射可能需要更多的对应点来适当地相互映射两个几何形状。所选定的点不需要一定位于任何专门测量的位置。相反,所选定的点几乎可位于重叠区域内的任何位置上,我们称之为对应点可位于任意位置,即这些位置不需要一定位于屏幕上的某一特定的点上。对于对应点,仅有的约束条件一般就是映射本身的约束。例如,对于单应矩阵的情况,四个对应点可不共线。
一旦在投影仪之间建立映射,一个共同的(世界)坐标系得以定义,用户能够映射影像至该坐标系并通过两台投影仪至屏幕上。
一旦建立了映射,用户(或其它机构)可在屏幕的角落处选择点111、113、115和117并形成一个从共同坐标系至屏幕的单应矩阵。在一个理想的实施例中,屏幕上的影像可实时更新,这样随着用户选择点,他/她就能够看到影像移动。
如果系统在整个组里包含两台以上的投影仪,那么可以针对整个组里的每一对投影仪够执行上述如图1所示的过程。不作为限制,比如传统的最小二乘法可用于解决成对映射之间任何的不对应。也就是说,人们能够找到使每个对应点对的误差平方和最小的映射集合。如果超过两台投影仪共享同一重叠区域,利用多于两台投影仪上的相同的对应点是有所帮助的,但这通常不是必须的。要注意的是,通常边缘融合用于多投影仪系统中来平衡亮度,且这种融合的参数可利用获得的映射以众所周知的方法计算。
图2所示为包括用于获取一个具有多台投影仪的系统的手动几何校准的一般步骤的程序。在第一步210中,利用对应点找到从一台投影仪至另一台投影仪的映射。这允许在投影仪上形成一个单独的坐标系。在第二步220中,用户或其他机构找到从所述单独坐标系至屏幕的映射。在最后一步230中,用户或其他机构可选地改善系统。
图3所示为完善投影仪之间映射的过程。首先用户或其他机构在步骤310中选择对应点。然后,用户或其他机构形成投影仪对之间的映射(步骤320),并在至少一对投影仪的重叠区域显示影像(步骤330)。通过观察投影仪对中的重叠影像,用户或其它机构可决定是否接受该映射或应对该映射进一步改善(决定步骤340)。如果需要,那么用户或机构可为了使其更为准确而完善现有对应点,或选择另外的对应点(步骤360)。在这种情况下的改善需要微调某一片输入影像落在屏幕上的确切位置,如下所述。然后增加320中映射的复杂度——例如,通过向映射添加更多的参数。可选地,为获得更好的适配性可对映射进行更新。作为进一步的可选方案,可将映射后对应点之间的不一致定义为位移场,且可利用样条曲线或其他位移场的表示法修正该位移场。用户或其他机构可重复添加和/或修改对应点的过程直到完成为止(步骤350)。
要注意的是,一旦形成了一个映射,就可在各种实施例中执行一个附加的步骤。在一台投影仪上选择一个位置并移动该位置使其与第二台投影仪上的一个位置相匹配。也就是说,一旦形成了映射,用户或其他机构可在一台投影仪内明确地选择位置,但在第二台投影仪内只能隐式地选择位置。
在图4中,图1中的过程通过一个典型的柱面屏幕400执行。从两台投影仪401和403投射的影像的轮廓如图所示。有一重叠区域405,在该重叠区域内以基本与上述平面屏幕示例相同的方式选择对应点X-O对,X(419)对应O(421)和X(423)对应O(425)和X(427)对应O(429)和X(431)对应O(433)。两台投影仪401、403能够利用单应矩阵映射到一个共同的坐标系,且单个影像能够以如此处一般所述的方式在整个系统上显示。因为在该实例中屏幕是弯曲的,四个点可能不足以在重叠区域内形成可接受的校准,在这种情况下可按照图3所述选取更多对应点,以将单应矩阵完善为一更加复杂的位移表示法,进而获取一个更加精确的映射表示法。一旦形成了一个共同的坐标系,单个影像就可在整个系统上显示。通常能够以一个简单直接的方式选择角落点411、413、415和417,这是因为这些点限定了屏幕上所需的填充区域。此外,用户或其他机构可沿边缘选择点,通常是沿屏幕的顶部和底部边缘,直到可配合和控制一根曲线勾勒出所述填充区域。这些点就是投射的影像内的点435和437。这些点不需要在曲线上以均匀间隔的方式选取,且因此也不需要确切地知道其位置。选择足够数目的点来准确地表示影像顶部和底部的曲线。
可将投影仪视为具有光学特性的对象。例如,这些特性可包括:焦距、位置、方向、光轴偏离投射影像中心的位移。选择一个最小化处理来优化这些参数,并同时最大限度地减小所述角落点至它们投射回投影仪内的点的距离的最小二乘方误差、根据现有参数集在所选投射回投影仪内的边缘曲线上的点至投影仪内柱面边缘的平方距离以及假定在对应点处相交的两台投影仪的光线之间的平方距离。一旦所述最小化汇聚,影像就能够投射到屏幕上,这样影像就能在水平方向上沿柱面的宽度均匀分布,并在垂直方向上沿柱面的高度均匀分布。
图5为一基准的示例,所述基准对于在屏幕上查找至子像素精度的对应位置来说是一个有用的工具。所示基准501为二元高斯函数(即影像平面内正交的x-y轴)。这一函数显示在每台投影仪上并可相互相对移动,然后实现校准。在这种方式下,每个高斯模糊的中心可形成对应。曲线503显示了高斯函数的强度横截面。类似这些的模糊或抗锯齿基准是有其益处的,因为人的眼睛擅长在一个区域上取平均。通过在一对投影仪上的重叠区域内放置两个亮度衰减的基准,用户可移动所述基准半个像素或更小,其间眼睛能够观察并发现重叠的一致性中的差异,并移动基准来补偿所述不一致性。可明确设想到各种训练过的机器视觉工具可代替眼睛用于在可选的实施例中执行重叠一致性的测定。
图6显示了一个涉及特殊情况的过程的实施例,其中可提前获得模型的强烈预估。事实可能是这样,因为显示系统已经被模拟且投影仪的参数已知。另一种情况也可能属实,即自动校准系统已预估了参数,以及系统显示相对这些参数的偏离量。例如,在一些情况下,投影仪的位置、方向及其焦距,径向畸变和镜头平移已知在一定公差范围内。在另一种情况下,用户可采用所有的信息在投影仪和屏幕之间查找出适当的映射。但是,由于普遍存在的公差,在一个典型情况下校准的结果可能并不完美。
如前所述,用户或其他机构可在一对重叠的投影仪之间选择对应点(步骤610)。该信息可用于更新模型(步骤620),其隐式地形成从一台投影仪至另一台投影仪的映射。在一个说明性的实施例中,该过程包括获得光线通过其对应点至投影仪距离的误差平方和的一个非线性最小化处理,同时允许投影仪模型参数在已知的公差范围内改变。一旦更新了每个模型,用户或其他机构就可以在系统上显示影像(步骤630),然后决定影像在该系统上是否可见地良好对齐(决定步骤640)。如果影像没有很好地对齐,那么用户或其他机构可在投影仪之间选择另外的对应点,以便更新每个模型(步骤660然后再次进行步骤620)。相关的步骤620、630、640和660可重复进行直到完成(步骤650)。如前所述,用户或其他机构可通过限定投影仪之间的映射为位移场,并将所述位移场添加至正投影到屏幕上的投影仪的模型中选择决定修正任何的不一致。
要注意的是,为了获取图6中所述的最小化,需要使用在具有已知的三维(3D)坐标的屏幕上选定的基准,如屏幕的角落,或屏幕各个部分之间的可见的相交部。这些3D中的约束条件可增加速度,并向整个程序提供额外的稳健性。
图7所示为投射在平面屏幕上的单一投影仪的一个实施例。例如,投影仪有两种分别落在屏幕700上并填充区域701和703的颜色。这是横向彩色失真的一个示例,在这种情况下投影仪的颜色没有以本来应该的方式重叠。在这种情况下,在每种颜色中可选择若干点以形成彩色通道之间的映射。在这种情况下,已选定了4对“X”至“0”的对应点对:719对应721,对723对应725,对731对应733和对727对应729。一旦在颜色之间形成至一共同坐标系中的映射,该共同坐标系就能够映射到屏幕上。在这种情况下,由“X”表示的711、713、715和717被选择。因此,该过程实际上与图1相同,只是在相同的投影仪但不同的颜色通道内选择对应点。
图8所示为使用额外的信息更新从投影仪到共同坐标系的映射的一个实施例。前几个步骤与图4中所做的完全一样。在步骤810中,至共同坐标系的映射的形成如上文所述。在步骤820中,收集了关于边界、已知基准点、边缘和/或角落的额外信息(在图4中,这种信息收集用于屏幕的边界和角落点)。在步骤830中,合并的信息用于如图4中所做的那样形成一个从共同坐标系至屏幕的映射。在步骤840中,至共同坐标系的映射和从共同坐标系至屏幕的映射都同时得到更新。在一个说明性的实施例中,这是通过如上所述的将投影仪模拟为光学对象而完成的。在这种情况下,从投影仪至共同坐标系的映射可通过预估投影仪的投影矩阵得以改善。且,改变的至共同坐标系的映射可影响从共同坐标系至屏幕的映射。例如,结果是,通过图4所述的找出投影仪的光学特性的最小化处理可用于同时改变至共同坐标系的映射和从共同坐标系至屏幕的映射。
Ⅱ.可选的额外实施例和示例
以下为采用本创新性概念的教示的实施方式的详细实例。
借助于背景信息和进一步的描述,参考图1,假设每台投影仪都是以红、绿和蓝三种基色操作的。也就是说,投影仪通过投射相互叠加的红色、绿色和蓝色像素形成影像。在这种情况下,每台投影仪都可视为三(3)台投影仪。在单个投影仪内的颜色通道之间的映射可基于枕形或桶形畸变。通过在每种颜色中选择若干个点,用户或其他机构能够找出已知的变形函数的参数,然后如图7所述那样分别将每种颜色移动至一个共同坐标系中。然后以上所述的程序可继续以前面所述的方式进行,除了在本例中,系统被视为实际上利用六台投影仪而不是两台,且投影仪间的映射的模拟与投影仪内的映射不同。
另一个实例为投影仪尝试显示多个缓冲区的情况。其可为3D影像,试图为每只眼睛提供不同的影像。可以设想,每个缓冲区对应于不同人的视觉习惯和要求。如果投影仪对每只眼睛使用偏振、微色差、或时分多路复用技术,或采用类似的技术,那么可以设想到在每个缓冲区内存储一种不同的颜色。在没有眼镜的帮助下选出色偏或偏振或缓冲区的时间,在本示例中用户可查看通过两个缓冲区生成的影像,正如图7所提出的那样。然后实际上所述系统被视为一个两色系统,根据上面的描述与作为一个三色系统的运行完全一样。
在一个说明性的实例中,以2×2的模式安装四(4)台投影仪填充一个平面屏幕,每台投影仪由不同的计算机驱动,计算机通过以太网网线实现TCP/IP通信或通过其他可接受的通讯通路和/或协议。组内的每台投影仪显示一种不同的纯色以清楚地向用户或其他机构表明每台投影仪之间的重叠区域的位置。用户或其他机构在一对投影仪的重叠区域中选择若干个点构成两台投影仪之间的对应点。该选择具体地可利用鼠标或类似的点击设备实现。然后用户或其他机构同时在两台投影仪上选择若干个点,形成两台投影仪之间的对应点。计算机程序/软件应用可通过显示相同的影像(如十字准线)但在每台投影仪上使用不同的颜色在每台投影仪内指明所述对应点。在一个说明性的实施例中,基于大量(多重)像素对十字准线进行平滑化处理以形成用于提高用户在子像素校准范围内定位十字准线的能力的强度衰减。
利用这些重叠点,一个示例性的软件程序和/或算法能够利用一个单应矩阵在所有的四台投影仪上形成一个共同的坐标系。随着更多的点被选中,投影仪之间的模型受到了过分约束。也就是说,映射具有一定数量的参数,且当有太多点的时候,一般不太可能精确地利用映射并实现重叠点之间的完美匹配,对此就可能需要映射中的一个第二个阶段。利用薄板样条曲线或位移场的其他表示法,可对映射函数进行校正,以便在创建于每一对投影仪之间的共同坐标系内,在重叠区域内已被表示为要重叠的位置实际上会重叠。一旦建立了一个共同的坐标系,就可能显示出模板,如覆盖整个投影仪系统的点的网格。用户或其他机构能够通过记录每台投影仪上未大体上完美重叠的点从而观察到至单个坐标系的映射中的误差,进而指示出所述误差,其中如果这些点实际上完美重叠的话误差是不存在的。然后可选地,用户或其他机构能够选择更多的点帮助改善投影仪之间的映射,或分别移动每台投影仪上的网格上现有的点来完善映射。
一旦得到满意的结果,用户或其他机构就能够将整个投影仪系统视为一个大的坐标系并绕投影仪的联合区域移动点,在这种情况下移动一点会影响受该点控制的所有投影仪。例如,受所述点支配,影像可随着变形实时显示至屏幕上。用户或其他机构能够据此决定输入影像将如何映射到屏幕上。要注意的是有各种各样的影像可供使用。矩形的网格有助于使所有的矩形显示为统一的大小。此外,线型的网格有助于尝试并使线段显示为平行和垂直的。如果可能的话,用户或其他机构可实时显示对系统的改变的效果。用于执行该任务的一项技术是使用OpenGL和DirectX来表示出变形,并使用处理设备(如计算机)上的传统显卡快速更新变形并展示结果。
采用此处提供的说明性理念的实施方式的另一个实例为在一个大约已知半径、高度和角度的柱形屏幕上提供数台投影仪,此处的屏幕边缘是可见的,且在屏幕上的已知位置处的接缝是可见的,如图4所示。在这种情况下,如前所述在重叠区域内选择多个点。也可选择屏幕角落的点和在屏幕上有可见的基准处的点,例如在屏幕上接缝的边缘处。通过选择这些点,实际上建立了至投影仪内2D位置的3D对应(屏幕的位置)。从投影仪的输入端至屏幕的映射可利用投影仪的针孔模型或类似模型模拟。在一种方法中,通过在每台投影仪上选择六(6)个点,形成每台投影仪至屏幕的投影矩阵。然后选择完善该模型的重叠点,或在模型的顶部添加修正以在彼此的顶部正确地映射每台投影仪。可选地,可以设想到,为了增加模型的复杂度可利用额外的信息,例如在投影透镜内引入针对径向失真的修正。
根据一个典型的实施例,当少于六个点可用时,要解决的问题等同于在机器视觉系统中利用的光束平差法程序/算法。在这些程序/算法中,存在一个使确定投影仪参数成为可能的最小化处理,此处的这些参数可包括位置、方向、焦距、投影中心等。其目的是最大限度地减小被选择的投影仪共同具有的点的回到投影仪中的再投影的平方误差和已选定的屏幕上的点的平方误差。要注意的是如果仅是粗略地知道屏幕尺寸,这些参数可包括在所述最小化处理中,且仍能够得到较好的结果。在屏幕边缘上适当地映射曲线的步骤可添加到该类型的最小化处理中,如图4的说明中那样。
此外,当这些类型的最小化完成时,其结果可用于构成从一台投影仪至另一台投影仪的映射。也就是说,关于屏幕的信息和投影的参数可用于同时构成投影仪相互之间的映射,和构成从共同坐标系至屏幕的映射。通过这种方式,屏幕的几何结构可用于帮助形成从投影仪至共同坐标系的映射。这一理念在图8中的步骤840中讨论过。
一种在几种屏幕类型中均有用的程序是具有消失点的。有时,用户或其他机构能够很容易地选择一个位于在屏幕的顶部上的一点的正下方的点。角落点的增加表明了一个由投影仪投射的矩形。利用消失点的技术,该矩形足以预估投影仪和屏幕之间的角度。这种类型的技术有助于启动非线性的最小化处理。这种类型的技术也适用于以下情况,其中投影仪的一些参数(例如内部参数)是已知的。这些内部参数可包括投影仪位置上的焦点。因此,该技术可连同由已知参数所提供的额外信息使用。
在另一个实施例中,参见图4,考虑到其中的屏幕不是柱形屏幕而也许是压制屏幕的,在这种情况下的屏幕在垂直方向上是相同的。即使在这种情况下,也可得到较好的结果。如果在顶部和底部边界或在投影仪上选择足够的点,边界可折回投影仪内,而这也正是这些点所需要做的。然后可通过最大程度地减小受到限制(顶部和底部边缘必须为平行曲线)的屏幕的形状来确定投影仪的投影参数。已有几种利用照相机/投影仪反馈系统处理压制屏幕的方法,其中照相机/投影仪反馈系统建议了数个此处可用的算法,包括由AditiMajundar等人发布的那些系统,和一种用在ScalableDesktop中的由Scalable DisplayTechnologies of Cambridge,MA发布的产品。
对于每一种屏幕类型都有很多典型的程序,通过这些程序可计算应如何映射影像到屏幕上。对于柱形屏幕来说,影像一般绕柱面变形,这样像素被赋予沿柱面相等的角度,且像素沿垂直于柱面轴线的方向均匀地分布。来自于重叠区域或来自投影仪位置的信息可用于预估系统的有效分辨率,以及在屏幕上观看影像的最佳分辨率。完成此预估的一个简单的方法可为计算重叠区域内丢失的像素数。一种用于显示影像的可选方法能够基于平截头台(frusta)采用获取的背景(rendered scenery)。在该说明性的示例中,可在柱面的中心处设置一个视点,且为依赖于投影仪的角填充为每台投影仪选择适当的平截头台。在可选的实施例中,用户或其他机构可将视点移至一个与柱面的中心不同的位置。
在一个示例中,可将一个屏幕定义为一个球面屏幕的一部分,说明性地,从右至左延展60度且向上/向下30度。对于这种类型的屏幕的映射能够以几乎与上述柱面屏幕一样的方式解决,通过选择点约束多台投影仪,然后在屏幕边缘上选择点来形成曲线。然后这些曲线可用于创建一个最小化处理来迭代投影仪的光学特性来最大程度地配合这些曲线,同时服从投影仪之间的约束。
在一个进一步的实施例中,屏幕内可包括角落部分,或包括硬边缘。可以是这种情况,当在一间房的角落投影时,或在一个由几个在接合处汇聚的平面屏幕组成的整个屏幕系统上投影时。这种情况基本上类似于其他屏幕的情况,其中用户还可使用鼠标在屏幕的边缘或角落上点击以标识期望映射在方向上锐变的的位置。类似于平面屏幕的情况,可关于每一墙壁建立单应矩阵,且可选择角落点来形成整体映射。
在另一个实施例中,其屏幕除了能够平稳地变化外有关该屏幕没什么是已知的。在这种情况下,仍能够于所有的投影仪之间建立映射以创建一个单个坐标系。由于没有已知的先验信息,只能在统一的坐标系内移动少量的点来表示影像应该在的位置。该程序可通过选择角落点应在的位置(例如一个2×2系统)开始,然后对点的数量进行迭代加倍。在每次迭代中,新的点可从之前的反复中通过利用基于样条曲线的内插法(或其他内插法)确定。只有那些应改变的点才会实际上移动。由于假定的平滑约束,期望是,随着每次迭代,映射将变得比以往任何时候都更接近于用户所需的精度。要注意的是即使是在这种关于屏幕没有任何可供使用的信息和可能会有大量的点被移动的情况下,该程序相对于更传统的方法仍然节省了大量的时间。在本领域的现有技术中,用户需要在每个单独的投影仪上独立地移动点。与此相反,根据上述的新颖程序,用户或其他机构只需为整个系统而不是单个的投影仪移动点。
本发明的一个目标是在子像素级别上确定投影仪之间的对应。因此,当在屏幕上来回移动点时,点通常在单像素级别上移动,这样投影仪之间的对应并非建立在子像素级别。但是,眼睛对于区域取平均很敏感,且该取平均可用于实现子像素匹配。例如,不是在投影仪上选择一点,而是绕屏幕移动具有大量像素上的强度衰减的函数-例如高斯函数。眼睛能够对函数的强度峰值和屏幕上衰减的平滑边缘进行插值。因此,用户可移动峰值的子像素数量并从一台投影仪到另一台匹配峰值和边缘,并因此获取子像素精度的对应。类似的方法可通过采用在大量像素上进行抗锯齿的十字准线实现,或利用其它具有亮度梯度的影像来完成。也可采用确定子像素等级对应的自动化技术。
应该清楚的是,此处所述的系统和方法提供了一种用于映射多台投影仪的高度有效的技术,其中所述多台投影仪提供影像至具有广泛几何结构的单个屏幕。所述系统和方法同样也适用于多种具体的应用。此类应用包括但不限于:(a)设置投影仪值,(b)设置变形盒值,(c)设置EasyBlendTM SDK值,(d)设置OMTE参数,设置Nvidia(显卡和图形引擎)颜色曲线参数,(e)设置DOPP屏幕所需的分辨率,(f)计算在屏幕上联动的遮光板,(g)一般用于展开多台投影仪、单个投影仪、平板显示(例如伽马曲线和空间强度的修正)、白板/电子白板、触控屏幕和/或飞行模拟器。
前文已经详细描述了本发明的实施例。在不脱离本发明的发明思想和范围情况下可进行各种修改和增加。以上描述的各种实施例可与其他描述的实施例组合以提供多种特征。此外,虽然前文描述了本发明的设备和方法的一些单独的实施例,但本文的描述仅仅是对本发明原理应用的说明。例如,可采用超出此处所述的附加的修正步骤。这些步骤尤其可基于显示设备的类型和采用的显示屏表面进行。此外,在人们可执行某一程序的某一步骤的情况下,可简单地想象到某一适当的自动化设备或机构可与用户互换使用,例如使用一个获得屏幕影像并在影像上执行常规的、程序化的视觉系统处理的机器视觉系统。因此术语“手动”应从广义上来理解,包括完全或至少部分在自动化操作协助下执行的步骤。同样地,可明确地设想到,此处所提供的技术可应用于校准作为具有两台或多台投影仪的投影系统的一部分的一个单一投影仪,或校准投影系统的一个单一单元。在执行一个单一投影仪的校准的情况下,术语“多台投影仪”可从广义上来理解,包括单个投影仪影像的单独的“多个组件”。此外,可明确设想到,此处所述的任何程序和函数可在硬件、软件中实施,包括含有程序指令的计算机可读媒介,或硬件和软件的组合。因此,该描述仅仅起示例性的作用,而并不旨在限制本发明的范围。
Claims (20)
1.一种校准一台或多台投影仪的方法,包括:
通过第一投影仪在屏幕上显示第一投射影像;
通过第二投影仪在屏幕上显示第二投射影像,从而限定第一投射影像与第二投射影像在屏幕上重叠的重叠区域;
选择对应于第一投影仪的第一多个对应点,并选择对应于第二投影仪的第二多个对应点,使得第一多个对应点中的每一个与第二多个对应点中的各个对应点重叠和对应,所述第一多个对应点与第一投射影像不同,第二多个对应点与第一投射影像和第二投射影像不同;
使用第一多个对应点和第二多个对应点确定从第一投影仪到第二投影仪的第一映射,从而限定第一投影仪和第二投影仪之间的公共坐标系;
选择对应于屏幕上各点的第三多个对应点,所述第三多个对应点中的至少一个对应于:边界点、曲线、屏幕的角或边缘,并且位于重叠区域之外;
使用所选择的第三多个对应点确定从公共坐标系到屏幕的第二映射;及
根据第一映射和第二映射通过第一投影仪和第二投影仪在屏幕上显示图像。
2.根据权利要求1所述的方法,其中所述第一多个对应点和第二多个对应点位于屏幕上的任意位置处。
3.根据权利要求1所述的方法,其中,所述屏幕的至少一部分包括至少一个:平面屏幕、柱面屏幕、或压制屏幕。
4.根据权利要求1所述的方法,其中,显示图像步骤还包括:基于对第一映射和第二映射中的至少一个的更新,实时更新所显示的图像。
5.根据权利要求2所述的方法,其中,基于屏幕的几何结构来确定第二映射。
6.根据权利要求1所述的方法,其中确定第一映射和确定第二映射同时执行。
7.根据权利要求1所述的方法,其中选择第一多个对应点和第二多个对应点的步骤包括在屏幕上显示影像,所述影像在预定的对应点处由亮度衰减所限定,据此两台或更多投影仪的影像为可移动的以实现第一投影仪和第二投影仪的影像之间的子像素匹配。
8.根据权利要求1所述的方法,其中选择第一多个对应点和第二多个对应点的步骤包括在重叠区域内以不同的颜色显示对应点以允许确定校准,其中结合至少两种不同的颜色形成一种新的颜色。
9.根据权利要求1所述的方法,其中,确定第一映射包括基于第一和第二多个对应点确定第一映射的估计和细化第一映射的估计。
10.根据权利要求1所述的方法,其中,第一多个对应点和第二多个对应点在重叠区域内。
11.一种校准一台或多台投影仪的方法,包括:
通过第一投影仪在屏幕上显示第一投射影像;
通过第二投影仪在屏幕上显示第二投射影像,从而限定第一投射影像与第二投射影像在屏幕上重叠的重叠区域;
选择对应于第一投影仪的第一多个对应点,并将所选择的第一多个对应点与屏幕上的重叠区域中的第一投射影像显示在屏幕上,所述第一多个对应点是非共线的;
选择与所述第二投影仪相对应的第二多个对应点,并且将所选择的第二多个对应点与屏幕上的重叠区域中的第二投射影像显示在屏幕上,使得显示在所述屏幕上的所述第一多个对应点中的每一个与显示在所述屏幕上的第二多个对应点中的相应一个重叠并对应,所述第二多个对应点是非共线的;
使用第一多个对应点和第二多个对应点确定从第一投影仪到第二投影仪的第一映射,从而限定第一投影仪和第二投影仪之间的公共坐标系,所述第一映射包括第一多个对应点和第二多个对应点之间的单应矩阵;
选择对应于屏幕上的点的第三多个对应点,所述第三多个对应点中的至少一个对应于:边界点、曲线、屏幕的角或边缘,并且位于重叠区域之外;
使用所选择的第三多个对应点确定从所述公共坐标系到屏幕的第二映射;及
根据第一映射和第二映射通过第一投影仪和第二投影仪在屏幕上显示图像。
12.根据权利要求11所述的方法,其中所述第一多个对应点和第二多个对应点位于屏幕上的任意位置处。
13.根据权利要求11所述的方法,其中,所述屏幕的至少一部分包括至少一个:平面屏幕、柱面屏幕、或压制屏幕。
14.根据权利要求11所述的方法,其中,显示图像步骤还包括:基于对第一映射和第二映射中的至少一个的更新,实时更新所显示的图像。
15.根据权利要求13所述的方法,其中,基于屏幕的几何结构来确定第二映射。
16.根据权利要求11所述的方法,其中确定第一映射和确定第二映射同时执行。
17.根据权利要求11所述的方法,其中,确定第一映射包括基于第一和第二多个对应点确定第一映射的估计和细化第一映射的估计。
18.根据权利要求11所述的方法,其中,第一多个对应点和第二多个对应点在重叠区域内。
19.一种校准一台或多台投影仪的系统,包括:
第一投影仪,用于在屏幕上显示第一投射影像;
第二投影仪,用于在屏幕上显示第二投射影像,从而限定第一投射影像与第二投射影像在屏幕上重叠的重叠区域;以及
处理器,所述处理器配置为:
选择对应于第一投影仪的第一多个对应点,并选择对应于第二投影仪的第二多个对应点,使得第一多个对应点中的每一个与第二多个对应点中的各个对应点重叠和对应,所述第一多个对应点与第一投射影像不同,第二多个对应点与第一投射影像和第二投射影像不同;
使用第一多个对应点和第二多个对应点确定从第一投影仪到第二投影仪的第一映射,从而限定第一投影仪和第二投影仪之间的公共坐标系;
选择对应于屏幕上各点的第三多个对应点,所述第三多个对应点中的至少一个对应于:边界点、曲线、屏幕的角或边缘,并且位于重叠区域之外;
使用所选择的第三多个对应点确定从公共坐标系到屏幕的第二映射;及
根据第一映射和第二映射通过第一投影仪和第二投影仪在屏幕上显示图像。
20.一种校准一台或多台投影仪的系统,包括:
第一投影仪,用于在屏幕上显示第一投射影像;
第二投影仪,用于在屏幕上显示第二投射影像,从而限定第一投射影像与第二投射影像在屏幕上重叠的重叠区域;以及
处理器,所述处理器配置为:
选择对应于第一投影仪的第一多个对应点,并将所选择的第一多个对应点与屏幕上的重叠区域中的第一投射影像显示在屏幕上,所述第一多个对应点是非共线的;
选择与所述第二投影仪相对应的第二多个对应点,并且将所选择的第二多个对应点与屏幕上的重叠区域中的第二投射影像显示在屏幕上,使得显示在所述屏幕上的所述第一多个对应点中的每一个与显示在所述屏幕上的第二多个对应点中的相应一个重叠并对应,所述第二多个对应点是非共线的;
使用第一多个对应点和第二多个对应点确定从第一投影仪到第二投影仪的第一映射,从而限定第一投影仪和第二投影仪之间的公共坐标系,所述第一映射包括第一多个对应点和第二多个对应点之间的单应矩阵;
选择对应于屏幕上的点的第三多个对应点,所述第三多个对应点中的至少一个对应于:边界点、曲线、屏幕的角或边缘,并且位于重叠区域之外;
使用所选择的第三多个对应点确定从所述公共坐标系到屏幕的第二映射;及
根据第一映射和第二映射通过第一投影仪和第二投影仪在屏幕上显示图像。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US41352010P | 2010-11-15 | 2010-11-15 | |
| US61/413,520 | 2010-11-15 | ||
| CN201180064209.9A CN103329540B (zh) | 2010-11-15 | 2011-11-15 | 利用手动和半自动技术校准显示系统的系统和方法 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201180064209.9A Division CN103329540B (zh) | 2010-11-15 | 2011-11-15 | 利用手动和半自动技术校准显示系统的系统和方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN106228527A CN106228527A (zh) | 2016-12-14 |
| CN106228527B true CN106228527B (zh) | 2020-08-04 |
Family
ID=45099192
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201180064209.9A Active CN103329540B (zh) | 2010-11-15 | 2011-11-15 | 利用手动和半自动技术校准显示系统的系统和方法 |
| CN201610816106.8A Active CN106228527B (zh) | 2010-11-15 | 2011-11-15 | 利用手动和半自动技术校准显示系统的系统和方法 |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201180064209.9A Active CN103329540B (zh) | 2010-11-15 | 2011-11-15 | 利用手动和半自动技术校准显示系统的系统和方法 |
Country Status (6)
| Country | Link |
|---|---|
| US (3) | US9369683B2 (zh) |
| EP (1) | EP2641400B1 (zh) |
| JP (2) | JP6198605B2 (zh) |
| KR (2) | KR20180117717A (zh) |
| CN (2) | CN103329540B (zh) |
| WO (1) | WO2012068112A1 (zh) |
Families Citing this family (32)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103329540B (zh) * | 2010-11-15 | 2016-08-24 | 斯加勒宝展示技术有限公司 | 利用手动和半自动技术校准显示系统的系统和方法 |
| JP2015519601A (ja) * | 2012-04-19 | 2015-07-09 | スケーラブル ディスプレイ テクノロジーズ インコーポレイテッド | システム入力解像度の変動なくディスプレイシステムを校正するシステムおよび方法 |
| US8922486B2 (en) * | 2012-07-24 | 2014-12-30 | Christie Digital Systems Usa, Inc. | Method, system and apparatus for determining locations in a projected image |
| JP6164820B2 (ja) * | 2012-10-11 | 2017-07-19 | キヤノン株式会社 | プロジェクタ、その制御方法、及び画像投影システム |
| US9860494B2 (en) * | 2013-03-15 | 2018-01-02 | Scalable Display Technologies, Inc. | System and method for calibrating a display system using a short throw camera |
| JP6299071B2 (ja) * | 2013-03-27 | 2018-03-28 | セイコーエプソン株式会社 | プロジェクター、映像補正方法およびプログラム |
| JP2015026992A (ja) * | 2013-07-26 | 2015-02-05 | 株式会社リコー | 投影システム、画像処理装置、投影方法およびプログラム |
| KR101515368B1 (ko) * | 2013-08-26 | 2015-04-27 | 씨제이씨지브이 주식회사 | 투사 장치 클러스터링 방법, 이를 이용한 관리 장치 및 관리 시스템 |
| US10080004B2 (en) | 2014-11-06 | 2018-09-18 | Disney Enterprises, Inc. | Method and system for projector calibration |
| US10691006B2 (en) * | 2014-12-09 | 2020-06-23 | Imax Theatres International Limited | Methods and systems of vibrating a screen |
| JP6602867B2 (ja) * | 2014-12-22 | 2019-11-06 | サイバーオプティクス コーポレーション | 三次元計測システムの校正を更新する方法 |
| JP6594170B2 (ja) * | 2015-11-12 | 2019-10-23 | キヤノン株式会社 | 画像処理装置、画像処理方法、画像投影システムおよびプログラム |
| AU2015275255A1 (en) | 2015-12-22 | 2017-07-06 | Canon Kabushiki Kaisha | Multi-projector alignment refinement |
| US10083652B2 (en) | 2016-05-04 | 2018-09-25 | International Business Machines Corporation | Method, apparatus and computer product to compensate for misaligned or overlapped electronic wallpapers |
| US10298893B2 (en) * | 2016-11-11 | 2019-05-21 | Christie Digital Systems Usa, Inc. | System and method for digital black level blending |
| US9992464B1 (en) | 2016-11-11 | 2018-06-05 | Christie Digital Systems Usa, Inc. | Method and system for screen correction |
| CA3041135C (en) | 2016-11-23 | 2020-01-14 | Realisations Inc. Montreal | Automatic calibration projection system and method |
| KR101847996B1 (ko) * | 2016-12-16 | 2018-04-12 | 씨제이씨지브이 주식회사 | 곡면 투사영역에 대한 이미지 투사 방법 및 이를 위한 투사 시스템 |
| JP6836961B2 (ja) * | 2017-06-09 | 2021-03-03 | アズビル株式会社 | 人検知装置および方法 |
| JP6345316B2 (ja) * | 2017-06-14 | 2018-06-20 | キヤノン株式会社 | プロジェクタ、その制御方法、プログラム、及び記憶媒体 |
| AU2017251725A1 (en) * | 2017-10-24 | 2019-05-09 | Canon Kabushiki Kaisha | Calibration of projection systems |
| DE102017010683B4 (de) * | 2017-11-17 | 2019-08-14 | domeprojection.com GmbH | Verfahren zur automatischen Wiederherstellung eines eingemessenen Zustands eines Projektionssystems |
| JP7013896B2 (ja) * | 2018-01-31 | 2022-02-01 | セイコーエプソン株式会社 | 投写システム、投写システムの制御方法、プロジェクター |
| US11375165B2 (en) * | 2018-04-10 | 2022-06-28 | ImmersaView Pty., Ltd. | Image calibration for projected images |
| CN110418120A (zh) * | 2018-04-26 | 2019-11-05 | 美国科视数字系统有限公司 | 堆叠投影仪对准的系统和方法 |
| CN110764642B (zh) * | 2019-10-10 | 2022-04-22 | 福建工大云技术有限公司 | 一种视觉投影校准的方法和装置 |
| CN111314682B (zh) * | 2020-04-01 | 2022-04-29 | 成都极米科技股份有限公司 | 幕布画面显示方法、装置及投影设备 |
| JP7287408B2 (ja) | 2021-02-18 | 2023-06-06 | セイコーエプソン株式会社 | 表示方法、情報処理装置、及びプログラム |
| US11394940B1 (en) * | 2021-04-16 | 2022-07-19 | Texas Instruments Incorporated | Dynamic image warping |
| CN114071104B (zh) * | 2022-01-18 | 2022-04-19 | 山东捷瑞数字科技股份有限公司 | 基于着色器实现多投影机投影渐变融合的方法 |
| CN114584747B (zh) * | 2022-03-04 | 2023-10-31 | 大连海事大学 | 一种360°环幕无缝投影软矫正方法 |
| JP2024064015A (ja) * | 2022-10-27 | 2024-05-14 | セイコーエプソン株式会社 | 投射方法、処理装置、プロジェクションシステム、及びプログラム |
Family Cites Families (40)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002516443A (ja) * | 1998-05-15 | 2002-06-04 | トリコーダー テクノロジー ピーエルシー | 3次元表示のための方法および装置 |
| US6456339B1 (en) * | 1998-07-31 | 2002-09-24 | Massachusetts Institute Of Technology | Super-resolution display |
| JP2000105813A (ja) | 1998-09-28 | 2000-04-11 | Nikon Corp | 画像連接システム、および画像連接プログラムを記録した記録媒体 |
| JP4150924B2 (ja) | 2003-07-02 | 2008-09-17 | セイコーエプソン株式会社 | 画像処理システム、プロジェクタ、プログラム、情報記憶媒体および画像処理方法 |
| US6520647B2 (en) | 2000-08-17 | 2003-02-18 | Mitsubishi Electric Research Laboratories Inc. | Automatic keystone correction for projectors with arbitrary orientation |
| US6733138B2 (en) | 2001-08-15 | 2004-05-11 | Mitsubishi Electric Research Laboratories, Inc. | Multi-projector mosaic with automatic registration |
| US6677956B2 (en) | 2001-08-15 | 2004-01-13 | Mitsubishi Electric Research Laboratories, Inc. | Method for cross-fading intensities of multiple images of a scene for seamless reconstruction |
| US6781591B2 (en) | 2001-08-15 | 2004-08-24 | Mitsubishi Electric Research Laboratories, Inc. | Blending multiple images using local and global information |
| US6527395B1 (en) | 2001-12-10 | 2003-03-04 | Mitsubishi Electric Research Laboratories, Inc. | Method for calibrating a projector with a camera |
| US7242818B2 (en) | 2003-01-17 | 2007-07-10 | Mitsubishi Electric Research Laboratories, Inc. | Position and orientation sensing with a projector |
| US6715888B1 (en) | 2003-03-21 | 2004-04-06 | Mitsubishi Electric Research Labs, Inc | Method and system for displaying images on curved surfaces |
| US6834965B2 (en) | 2003-03-21 | 2004-12-28 | Mitsubishi Electric Research Laboratories, Inc. | Self-configurable ad-hoc projector cluster |
| US6709116B1 (en) | 2003-03-21 | 2004-03-23 | Mitsubishi Electric Research Laboratories, Inc. | Shape-adaptive projector system |
| US6729733B1 (en) | 2003-03-21 | 2004-05-04 | Mitsubishi Electric Research Laboratories, Inc. | Method for determining a largest inscribed rectangular image within a union of projected quadrilateral images |
| US6755537B1 (en) | 2003-03-21 | 2004-06-29 | Mitsubishi Electric Research Laboratories, Inc. | Method for globally aligning multiple projected images |
| US6811264B2 (en) | 2003-03-21 | 2004-11-02 | Mitsubishi Electric Research Laboratories, Inc. | Geometrically aware projector |
| WO2004086755A1 (en) | 2003-03-26 | 2004-10-07 | Matsushita Electric Works Ltd. | Method for creating brightness filter and virtual space creation system |
| US7292269B2 (en) | 2003-04-11 | 2007-11-06 | Mitsubishi Electric Research Laboratories | Context aware projector |
| JP2005004201A (ja) | 2003-06-10 | 2005-01-06 | Mitsubishi Electric Research Laboratories Inc | 画像を表示面上に投影する方法及びシステム |
| US7001023B2 (en) | 2003-08-06 | 2006-02-21 | Mitsubishi Electric Research Laboratories, Inc. | Method and system for calibrating projectors to arbitrarily shaped surfaces with discrete optical sensors mounted at the surfaces |
| US6764185B1 (en) | 2003-08-07 | 2004-07-20 | Mitsubishi Electric Research Laboratories, Inc. | Projector as an input and output device |
| US7421111B2 (en) | 2003-11-07 | 2008-09-02 | Mitsubishi Electric Research Laboratories, Inc. | Light pen system for pixel-based displays |
| JP4501481B2 (ja) * | 2004-03-22 | 2010-07-14 | セイコーエプソン株式会社 | マルチプロジェクションシステムのための画像補正方法 |
| US7137707B2 (en) | 2004-07-01 | 2006-11-21 | Mitsubishi Electric Research Laboratories, Inc | Projector-camera system with laser pointers |
| US7154395B2 (en) | 2004-07-01 | 2006-12-26 | Mitsubishi Electric Research Laboratories, Inc. | Interactive wireless tag location and identification system |
| US7355583B2 (en) | 2004-08-10 | 2008-04-08 | Mitsubishi Electric Research Laboretories, Inc. | Motion-based text input |
| WO2006025191A1 (ja) | 2004-09-01 | 2006-03-09 | Olympus Corporation | マルチプロジェクションシステムにおける幾何補正方法 |
| JP4751084B2 (ja) | 2005-01-11 | 2011-08-17 | 三菱プレシジョン株式会社 | マッピング関数生成方法及びその装置並びに複合映像生成方法及びその装置 |
| US7306341B2 (en) * | 2005-02-28 | 2007-12-11 | Hewlett-Packard Development Company, L.P. | Multi-projector geometric calibration |
| US7252387B2 (en) | 2005-03-21 | 2007-08-07 | Mitsubishi Electric Research Laboratories, Inc. | System and method for mechanically adjusting projector pose with six degrees of freedom for image alignment |
| KR100772913B1 (ko) | 2006-01-27 | 2007-11-05 | 삼성전자주식회사 | 영상 디스플레이 장치 및 방법 |
| US20080007700A1 (en) * | 2006-07-10 | 2008-01-10 | Vanbaar Jeroen | Method and system for aligning an array of rear-projectors |
| JP4965967B2 (ja) * | 2006-10-30 | 2012-07-04 | 株式会社日立製作所 | 映像表示システムの調整システム |
| CN100480867C (zh) * | 2007-03-06 | 2009-04-22 | 上海微电子装备有限公司 | 一种基于图像技术的对准系统及对准方法 |
| US8994757B2 (en) * | 2007-03-15 | 2015-03-31 | Scalable Display Technologies, Inc. | System and method for providing improved display quality by display adjustment and image processing using optical feedback |
| CN101132535A (zh) * | 2007-09-12 | 2008-02-27 | 浙江大学 | 基于转台的多投影大屏拼接方法 |
| JP5255250B2 (ja) | 2007-09-20 | 2013-08-07 | パナソニック株式会社 | 映像調整システム |
| CN101321303A (zh) * | 2008-07-17 | 2008-12-10 | 上海交通大学 | 非平面多投影显示的几何与光学校正方法 |
| CN101482690B (zh) * | 2009-01-05 | 2010-11-10 | 清华大学 | 多投影仪组合显示的自适应模板大屏幕亮度校正方法 |
| CN103329540B (zh) * | 2010-11-15 | 2016-08-24 | 斯加勒宝展示技术有限公司 | 利用手动和半自动技术校准显示系统的系统和方法 |
-
2011
- 2011-11-15 CN CN201180064209.9A patent/CN103329540B/zh active Active
- 2011-11-15 EP EP11791696.5A patent/EP2641400B1/en active Active
- 2011-11-15 WO PCT/US2011/060795 patent/WO2012068112A1/en active Application Filing
- 2011-11-15 CN CN201610816106.8A patent/CN106228527B/zh active Active
- 2011-11-15 KR KR1020187030074A patent/KR20180117717A/ko not_active Application Discontinuation
- 2011-11-15 KR KR1020137013218A patent/KR20140048073A/ko active Search and Examination
- 2011-11-15 JP JP2013538992A patent/JP6198605B2/ja active Active
- 2011-11-15 US US13/296,864 patent/US9369683B2/en active Active
-
2016
- 2016-06-13 US US15/181,376 patent/US10503059B2/en active Active
-
2017
- 2017-03-22 JP JP2017056604A patent/JP6475905B2/ja active Active
-
2019
- 2019-12-09 US US16/707,759 patent/US11269244B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US20120120372A1 (en) | 2012-05-17 |
| US10503059B2 (en) | 2019-12-10 |
| KR20140048073A (ko) | 2014-04-23 |
| US20160363842A1 (en) | 2016-12-15 |
| US11269244B2 (en) | 2022-03-08 |
| JP2014503838A (ja) | 2014-02-13 |
| JP6475905B2 (ja) | 2019-02-27 |
| CN103329540B (zh) | 2016-08-24 |
| CN103329540A (zh) | 2013-09-25 |
| US9369683B2 (en) | 2016-06-14 |
| EP2641400A1 (en) | 2013-09-25 |
| US20200192201A1 (en) | 2020-06-18 |
| JP6198605B2 (ja) | 2017-09-20 |
| KR20180117717A (ko) | 2018-10-29 |
| CN106228527A (zh) | 2016-12-14 |
| WO2012068112A1 (en) | 2012-05-24 |
| JP2017161908A (ja) | 2017-09-14 |
| EP2641400B1 (en) | 2021-07-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN106228527B (zh) | 利用手动和半自动技术校准显示系统的系统和方法 | |
| US8768094B2 (en) | System and method for automated calibration and correction of display geometry and color | |
| TWI511122B (zh) | 校正相機之影像失真的校準方法與系統 | |
| JP4637845B2 (ja) | マルチプロジェクションシステムにおける幾何補正方法 | |
| US10750141B2 (en) | Automatic calibration projection system and method | |
| US8189035B2 (en) | Method and apparatus for rendering virtual see-through scenes on single or tiled displays | |
| CN105308503A (zh) | 利用短程相机校准显示系统的系统和方法 | |
| KR101016136B1 (ko) | 프로젝터 어레이 정렬 방법 및 시스템 | |
| US8730130B1 (en) | System and method for automatically aligning immersive displays | |
| KR20120098649A (ko) | 캘리브레이션된 투사를 생성하기 위한 방법 및 장치 | |
| CN111357284B (zh) | 用于自动恢复投影系统的校准状态的方法 | |
| KR20170025214A (ko) | 다시점 깊이맵 생성 방법 | |
| CN112911270B (zh) | 一种用于100%offset三维切片式投影成像系统的图像修正方法 | |
| CN104778658A (zh) | 一种多投影机投影图像全自动几何拼接校正方法 | |
| WO2014119555A1 (ja) | 画像処理装置、表示装置及びプログラム | |
| JP2020080064A (ja) | 投影制御装置、投影装置、投影装置の制御方法、プログラム、記憶媒体 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |