CN103260832A - 用于控制使用缆线的自主平台的系统和方法 - Google Patents
用于控制使用缆线的自主平台的系统和方法 Download PDFInfo
- Publication number
- CN103260832A CN103260832A CN201180056631XA CN201180056631A CN103260832A CN 103260832 A CN103260832 A CN 103260832A CN 201180056631X A CN201180056631X A CN 201180056631XA CN 201180056631 A CN201180056631 A CN 201180056631A CN 103260832 A CN103260832 A CN 103260832A
- Authority
- CN
- China
- Prior art keywords
- information
- cable
- length
- autonomous platform
- generate
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000000034 method Methods 0.000 title claims abstract description 50
- 238000007665 sagging Methods 0.000 claims abstract description 69
- 238000012545 processing Methods 0.000 claims abstract description 45
- 238000005259 measurement Methods 0.000 claims abstract description 21
- 238000013461 design Methods 0.000 description 20
- 238000006467 substitution reaction Methods 0.000 description 18
- 230000006870 function Effects 0.000 description 11
- 238000010586 diagram Methods 0.000 description 10
- 239000011159 matrix material Substances 0.000 description 8
- 241001234523 Velamen Species 0.000 description 6
- 230000000295 complement effect Effects 0.000 description 5
- 230000008859 change Effects 0.000 description 4
- 230000008569 process Effects 0.000 description 4
- 230000008676 import Effects 0.000 description 3
- 238000007689 inspection Methods 0.000 description 3
- 239000003973 paint Substances 0.000 description 3
- 239000002994 raw material Substances 0.000 description 3
- 230000009471 action Effects 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 2
- 210000000088 lip Anatomy 0.000 description 2
- 238000013519 translation Methods 0.000 description 2
- 238000003466 welding Methods 0.000 description 2
- 230000015572 biosynthetic process Effects 0.000 description 1
- 238000011960 computer-aided design Methods 0.000 description 1
- 238000005755 formation reaction Methods 0.000 description 1
- JEIPFZHSYJVQDO-UHFFFAOYSA-N iron(III) oxide Inorganic materials O=[Fe]O[Fe]=O JEIPFZHSYJVQDO-UHFFFAOYSA-N 0.000 description 1
- 238000003754 machining Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 210000003205 muscle Anatomy 0.000 description 1
- NJPPVKZQTLUDBO-UHFFFAOYSA-N novaluron Chemical compound C1=C(Cl)C(OC(F)(F)C(OC(F)(F)F)F)=CC=C1NC(=O)NC(=O)C1=C(F)C=CC=C1F NJPPVKZQTLUDBO-UHFFFAOYSA-N 0.000 description 1
- 239000000126 substance Substances 0.000 description 1
Images








Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J11/00—Manipulators not otherwise provided for
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/10—Programme-controlled manipulators characterised by positioning means for manipulator elements
- B25J9/104—Programme-controlled manipulators characterised by positioning means for manipulator elements with cables, chains or ribbons
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1615—Programme controls characterised by special kind of manipulator, e.g. planar, scara, gantry, cantilever, space, closed chain, passive/active joints and tendon driven manipulators
- B25J9/1623—Parallel manipulator, Stewart platform, links are attached to a common base and to a common platform, plate which is moved parallel to the base
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0268—Control of position or course in two dimensions specially adapted to land vehicles using internal positioning means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B43/00—Improving safety of vessels, e.g. damage control, not otherwise provided for
- B63B43/02—Improving safety of vessels, e.g. damage control, not otherwise provided for reducing risk of capsizing or sinking
- B63B43/04—Improving safety of vessels, e.g. damage control, not otherwise provided for reducing risk of capsizing or sinking by improving stability
- B63B2043/047—Improving safety of vessels, e.g. damage control, not otherwise provided for reducing risk of capsizing or sinking by improving stability by means of hull shapes comprising a wide hull portion near the design water line, and a slender, buoyancy providing, main hull portion extending towards the bottom
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B71/00—Designing vessels; Predicting their performance
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Robotics (AREA)
- Automation & Control Theory (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Remote Sensing (AREA)
- Health & Medical Sciences (AREA)
- General Health & Medical Sciences (AREA)
- Orthopedic Medicine & Surgery (AREA)
- Radar, Positioning & Navigation (AREA)
- Aviation & Aerospace Engineering (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
- Manipulator (AREA)
- Control And Safety Of Cranes (AREA)
Abstract
本发明公开了用于控制使用缆线的自主平台的系统和方法。根据本发明的一个实施例,一种用于控制被连接至缆线的自主平台的自主平台控制系统包括:路径设置单元,其使用最终位置信息和第一位置信息以生成所述自主平台的移动控制信息;速度管理单元,其通过使用所述移动控制信息控制所述自主平台的速度以移动所述自主平台;处理单元,其通过使用所述缆线关于所移动的自主平台的旋转角的测量值而设置所述自主平台的位置和姿势,以生成当前位置信息并通过使用当前位置信息设置所述缆线的长度以生成缆线操作长度信息;以及下垂管理单元,其使用作用于所述缆线上的缆线张力的测量信息以确定所述缆线的下垂,并当所述缆线下垂时,使用所述缆线张力的测量信息以调整所述缆线。
Description
技术领域
本发明涉及一种用于控制自主平台的系统,更具体地是指一种用于控制使用缆线的自主平台的系统和方法。
背景技术
由于船变得越来越大,因此形成船体的区块也越来越大。一般来说,大船的船体是通过制造构成船体部分的区块,然后组装区块而构筑成的。换句话说,当原料表面上的锈或外来物质被去掉且对原料刷上油漆以防腐蚀后,可将原料焊接在一起以建造区块,并将区块彼此组装在一起以完成船体。
这些区块需要进行焊接、喷砂和在其内部刷有油漆。相应地,也可在区块中执行各种任务,如收集用于喷砂的砂砾、在刷漆后干燥/检查/测量漆膜等。已稳步开发各种用于焊接、刷漆和检查的自动化准备以改善区块中的工作效率。因此,需要一种用于将完成任务所需的装置自由移动至区块中所需位置的装置,从而可以很容易地在区块中执行任务。用于在区块中自由移动的最熟知的装置为使用缆线的自主平台。
传统的使用筋的自主平台不仅具有比使用线性致动器的斯图尔特平台更宽的工作半径,还具有更强的承担极重负载的特性。
在无重力条件下(即未施加负载的条件下)已经可以控制这种自主平台的位置和姿势,从而防止拉伸缆线。但是,在使用缆线的自主平台在具有负载的情况下,缆线会因自主平台的重量而被拉伸,从而导致缆线的下垂。如果在缆线下垂期间自主平台受到干扰时,则很难保持自主平台的位置和姿势。
此外,由于在施加负载时自主平台本身也具有重量,缆线会被拉伸,因此不容易将自主平台移至所需位置和姿势,从而在进行焊接、刷漆和检查时会发生错误。
发明内容
技术问题
本发明的一个实施例提供了一种用于控制使用缆线的自主平台的系统和方法,其能够防止被连至自主平台的缆线下垂。
本发明的一个实施例提供了一种用于控制使用缆线的自主平台的系统和方法,其能够控制作用于缆线的张力。
本发明的一个实施例提供了一种用于控制使用缆线的自主平台的系统和方法,其能够准确地确定被固定至自主平台和区块的缆线的长度。
本发明的一个实施例提供了一种用于控制使用缆线的自主平台的系统和方法,其能够使用作用于缆线上的张力而确定区块内自主平台的准确位置和姿势。
技术方案
本发明的一个方面提供了一种用于控制与缆线相连的自主平台的系统。
根据本发明一个实施例的一种用于控制与缆线连接的自主平台的系统包括:路径设置单元,其被配置成使用最终位置信息和初始位置信息以生成移动控制信息;速度管理单元,其被配置成通过使用所述移动控制信息控制所述自主平台的速度以移动所述自主平台;处理单元,其被配置成通过使用关于所述缆线和所移动的自主平台的旋转角测量值以生成当前位置信息,并被配置成通过使用当前位置信息和所述移动控制信息以生成缆线操作长度信息;以及下垂管理单元,其被配置成一旦生成所述缆线操作长度信息时,使用作用于所述缆线上的缆线张力的测量信息以确定所述缆线的下垂,并被配置成当确定已存在所述缆线的下垂时,使用所述缆线张力的测量信息以调整所述缆线。
下垂管理单元可以设置作为确定缆线下垂基准的张力基准信息,当缆线张力的测量信息小于张力基准信息时确定缆线已下垂,并使用缆线张力的测量信息调整缆线。
下垂管理单元可以通过将缆线张力的测量信息与张力基准信息相比较以生成张力比较信息,并使用张力比较信息以拉动所述缆线。
处理单元可以包括:缆线管理模块,其被配置成通过使用旋转角的测量值设置所述缆线的长度以生成所述缆线的当前长度信息;位置管理模块,其被配置成使用缆线的当前长度信息以生成当前位置信息;长度管理模块,其被配置成通过使用当前位置信息和移动控制信息中的所移动的位置信息以生成所述缆线操作长度信息;以及绞车控制模块,其被配置成通过使用所述缆线操作长度信息控制绞车以卷绕或退绕所述缆线而移动所述自主平台,以解决所述缆线的下垂问题,其中所移动的位置信息是指在每个单位时间内需将所述自主平台移至的位置和姿势。
缆线管理模块可以包括:旋转角分析模块,其被配置成通过使用经被连接至所述缆线的编码器测量的所述旋转角测量值以生成所述缆线的当前长度信息;以及张力分析模块,其被配置成使用经被连接至所述缆线的压力传感器测量的张力测量值以生成张力测量信息。
位置管理模块可以包括:预测模块,其被配置成设置任意位置信息,该任意位置信息指示在自主平台所处的区块中的任意位置,并通过使用所述任意位置信息设置所述缆线的任意长度信息;以及生成模块,其被配置成使用所述缆线的任意长度信息和所述缆线的当前长度信息以生成当前位置信息。
生成模块可以通过将所述缆线的任意长度信息与所述缆线的当前长度信息相比较以生成长度差值,确定所述长度差值是否小于所述长度基准信息,并当确定所述长度差值小于所述长度基准信息时使用所述任意位置信息以生成当前位置信息。
生成模块当确定所述长度差值大于或等于所述长度基准信息时可以使用所述长度差值以重新设置所述任意位置信息。
此外,本发明的一个方面提供了一种用于控制与缆线相连的自主平台的系统。
一种用于控制与缆线连接的自主平台的系统包括:路径设置单元,其被配置成使用最终位置信息和初始位置信息以设置移动控制信息;速度管理单元,其被配置成通过使用所述移动控制信息控制所述自主平台的速度以移动所述自主平台;位置管理单元,其被配置成通过使用相对于所述缆线和所移动的自主平台的旋转角测量信息并使用作用于所述缆线上的缆线张力信息以生成所述缆线的当前长度信息,且被配置成通过使用所述缆线的当前长度信息以生成所移动的自主平台的当前位置信息;以及处理单元,其被配置成通过使用当前位置信息和所述移动控制信息以生成缆线操作长度信息并通过使用所述缆线操作长度信息和所述旋转角测量信息以生成旋转角控制信息。
移动控制信息可包括在每个单位时间内所述自主平台需移动的移动速度信息以及所移动的位置信息中的至少一个。
处理单元可包括:分析模块,其被配置为使用当前位置信息和所移动的位置信息以生成所述缆线操作长度信息;预测模块,其被配置成使用所述缆线操作长度信息以生成旋转角预测信息;以及确定模块,其被配置成通过将所述旋转角预测信息与所述旋转角测量信息相比较以生成所述旋转角控制信息。
预测模块可生成与所述缆线操作长度信息相对应的张力预测信息且通过使用所述缆线操作长度信息和所述张力预测信息以生成所述旋转角预测信息。
位置管理单元包括:旋转角分析模块,其被配置成通过使用经连接至所述缆线的编码器测量的所述旋转角测量信息以生成所述缆线的基本长度信息;张力分析模块,其被配置成使用经连接至所述缆线的压力传感器测量的张力测量信息以生成缆线张力信息;以及长度设置模块,其被配置成通过使用所述缆线的基本长度信息以及所述缆线张力信息设置所述缆线的长度以生成所述缆线的当前长度信息。
位置管理单元能包括:操作模块,其被配置成设置任意位置信息,该任意位置信息指示所述自主平台在区块中所在位置,并通过使用所述任意位置信息设置任意长度信息;以及生成模块,其被配置成通过将所述缆线的任意长度信息与所述缆线的当前长度信息相比较以生成长度差值,并当所述长度差值小于长度基准信息时将所述任意位置信息设置为当前位置信息。
生成模块当所述长度差值大于或等于所述长度基准信息时,可使用所述长度差值以重新设置所述任意位置信息。
本发明的一个方面提供了一种通过用于控制使用缆线的自主平台的系统控制自主平台的方法。
一种用于控制使用缆线的自主平台的方法,所述自主平台由一种用于控制使用缆线的自主平台的系统所控制,该方法包括:(a)使用最终位置信息和初始位置信息生成所述自主平台的移动控制信息,并使用所述移动控制信息移动所述自主平台;(b)通过使用被连接至所述缆线的绞车旋转角测量值而设置所述自主平台的位置和姿势以生成当前位置信息;(c)通过使用当前位置信息而设置所述缆线的长度以生成缆线操作长度信息;(d)使用作用于所述缆线上的缆线张力的测量信息以确定所述缆线的下垂,并当存在所述缆线的下垂时,使用所述缆线张力的测量信息以调整所述缆线;以及(e)使用所述移动控制信息控制所述自主平台的速度以移动所述解决缆线下垂问题的自主平台。
步骤(d)可包括:通过测量被连至所述自主平台的缆线的张力以生成缆线张力的测量信息;设置作为确定所述缆线下垂基准的张力基准信息;以及当所述缆线张力的测量信息小于所述张力基准信息时确定所述缆线已下垂,并使用所述缆线张力的测量信息以调整所述缆线。
步骤(b)可包括:(b1)通过使用所述旋转角测量值设置所述缆线的长度以生成所述缆线的当前长度信息;以及(b2)使用所述缆线的当前长度信息通过正运动学生成当前位置信息。
步骤(b2)可包括:设置在所述自主平台所处区块中指示任意位置的任意位置信息;通过使用所述任意位置信息设置所述缆线的任意长度信息;以及使用所述缆线的任意长度信息和所述缆线的当前长度信息生成当前位置信息。
通过使用所述缆线的任意长度信息和所述缆线的当前长度信息生成当前位置信息的步骤可包括:通过将所述缆线的任意长度信息与所述缆线的当前长度信息相比较生成长度差值;通过确定所述长度差值是否小于长度基准信息以生成长度确定结果信息;以及当所述长度确定结果信息显示所述长度差值小于所述长度基准信息时,使用所述任意位置信息生成当前位置信息。
通过使用所述缆线的任意长度信息和所述缆线的当前长度信息生成当前位置信息的步骤还可包括:当所述长度确定结果显示所述长度差值大于或等于所述基准信息时,使用长度差值重新设置所述任意位置信息。
步骤(c)可包括使用当前位置信息通过逆运动学生成所述缆线操作长度信息。
本发明的一个方面提供了一种通过用于控制使用缆线的自主平台的系统控制自主平台的方法。
一种用于控制使用缆线的自主平台的方法,所述自主平台由一种用于控制使用缆线的自主平台的系统所控制,所述方法包括:(a)使用最终位置信息和初始位置信息设置移动控制信息,并使用所述移动控制信息移动所述自主平台;(b)使用相对于缆线和所移动的自主平台的旋转角测量信息和作用于所述缆线上的缆线张力信息生成所述缆线的当前长度信息;(c)使用所述缆线的当前长度信息生成所移动的自主平台的当前位置信息;(d)使用当前位置信息和移动控制信息生成缆线操作长度信息;(e)使用设置缆线操作长度信息和旋转角测量信息的旋转角控制信息移动所述自主平台。
步骤(a)可包括:使用最终位置信息和初始位置信息设置所述移动控制信息,其包括在每个单位时间内所述自主平台需移动的移动速度信息以及所移动的位置信息中的至少一个;以及使用所述移动控制信息移动所述自主平台。
步骤(e)可包括:生成与所述缆线操作长度信息相对应的张力预测信息;使用所述缆线操作长度信息和所述张力预测信息生成旋转角预测信息;以及将所述旋转角预测信息与所述旋转角测量信息相比较以生成所述旋转角控制信息。
步骤(d)可包括使用当前位置信息和所移动的位置信息通过逆运动学生成所述缆线操作长度信息。
步骤(b)可包括:使用经连接至所述缆线的编码器测量的所述旋转角测量信息生成所述缆线的基本长度信息;使用经连接至所述缆线的压力传感器测量的张力测量信息生成缆线张力信息;以及使用所述缆线的基本长度信息以及所述缆线张力信息设置所述缆线的长度以生成所述缆线的当前长度信息。
步骤(c)包括使用所述缆线的当前长度信息通过正运动学生成当前位置信息。
步骤(c)包括:设置在区块中所述自主平台所处位置的任意位置信息;使用所述任意位置信息设置所述缆线的任意长度信息;通过将所述缆线的任意长度信息与所述缆线的当前长度信息相比较生成长度差值;以及当所述长度差值小于长度基准信息时使用长度差值和任意位置信息生成当前位置信息。
附图说明
图1为说明根据本发明一个实施例的一种用于控制使用缆线的自主平台的系统的方块图。
图2为说明根据本发明一个实施例的一种用于控制使用缆线的自主平台的系统的处理单元详细配置的方块图。
图3和4为说明根据本发明一个实施例的一种用于控制使用缆线的自主平台的方法的详细流程图。
图5为说明根据本发明一个实施例的一种用于控制使用缆线的自主平台的系统的方块图。
图6为说明图5所示的用于控制使用缆线的自主平台的系统的位置管理单元详细配置的方块图。
图7为详细说明图5所示的用于控制使用缆线的自主平台的系统的处理单元的方块图。
图8和9为说明根据本发明一个实施例的一种用于控制使用缆线的自主平台的方法的详细流程图。
图10所示的实例说明了在根据本发明一个实施例的一种用于控制使用缆线的自主平台的方法中是如何生成当前位置信息的。
图11所示的实例说明了在根据本发明一个实施例的一种用于控制使用缆线的自主平台的方法中是如何生成缆线操作长度信息的。
具体实施方式
在下文中,将参考附图说明根据一个实施例的一种用于控制使用缆线的自主平台的系统和方法。在参考附图描述实施例的过程中,任何相同或相似的元件均具有相同的参考数字,且不会冗余地提供有关该元件的描述。
下面将参照图1和图2描述根据本发明一个实施例的一种用于控制使用缆线的自主平台的系统。
图1为说明根据本发明一个实施例的一种用于控制使用缆线的自主平台的系统的方块图。
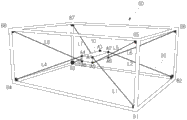
参照图1,一种用于控制使用缆线100的自主平台的系统(以下简称为“自主平台控制系统)使用缆线在区块中移动自主平台。在这里,自主平台10经缆线20被固定在区块50中,如图11所示,且其可通过多个连接的缆线20而进行移动。
这种自主平台10可包括移动平台和工作装置,且工作装置可包括工作机器人和基座。相应地,自主平台10可很容易地在区块50中进行焊接、喷砂、刷漆和表面加工任务,且同时在作为工作空间的区块50中进行自由的移动。在这里,自主平台10可具有八根连接至其的缆线20。
缆线20的一端与区块50相联接,且将缆线20的另一端联接至安装于自主平台10中的绞车上(未示出)。在这里,绞车可通过卷绕或退绕缆线20而精确地调整缆线20的长度。相应地,自主平台10可通过使用绞车而调整缆线20的长度,从而被移动至区块50中所需位置。
再参照图1,自主平台控制系统100包括输入单元110、路径设置单元120、速度管理单元130、处理单元200、下垂管理单元170、显示单元150和存储单元160。
输入单元110可具备经用户输入的最终位置信息。在这里,最终位置信息指示在区块50中需最终将自主平台10移至的位置和姿势。
在这里,可通过包括x、y和z的坐标值表示自主平台10的位置以指出自主平台10在区块50中的所在位置。
在这里,可通过包括ψ、θ和 的欧拉角表示自主平台10的姿势以指出自主平台10相对于其在区块50中的位置所倾斜的角度。
的欧拉角表示自主平台10的姿势以指出自主平台10相对于其在区块50中的位置所倾斜的角度。
即,最终位置信息可通过x、y、z、ψ、θ和 表示在区块50中需最终将自主平台10移至的位置和姿势。最终位置信息可包括基于自主平台10的局部坐标值以及基于区块50中任一点的整体坐标值。
表示在区块50中需最终将自主平台10移至的位置和姿势。最终位置信息可包括基于自主平台10的局部坐标值以及基于区块50中任一点的整体坐标值。
输入单元110为用于具备用户输入的各种数据的用户界面(UI),且对于输入单元110的实现方式没有任何限制。例如,输入单元110可采用任何方式,如键盘、触摸板、鼠标、键盘板等,其可具备输入至其中的数据。
同时,输入单元110可具备通过使用CAD/CAM(计算机辅助设计/计算机辅助制造)等所生成的宏而输入的最终位置信息。在下文中,将描述的是由用户通过输入单元110输入最终位置信息。
路径设置单元120使用最终位置信息和初始位置信息生成自主平台10的移动控制信息。在这里,移动控制信息是指将自主平台10从初始位置信息移至最终位置信息所需的控制信息。
特别地,路径设置单元120在移动前生成指示自主平台10位置和姿势的初始位置信息。即,初始位置信息是指在重新定位自主平台10前的位置和姿势,可表示包括x、y和z的坐标值以指出区块50中自主平台10所在的位置,且可表示包括ψ、θ和 的欧拉角以指出在区块50中自主平台10的倾斜角度的姿势。
的欧拉角以指出在区块50中自主平台10的倾斜角度的姿势。
路径设置单元120可使用通过传感器单元60输入的传感器值或使用通过处理单元200提供的线缆初始长度信息以生成初始位置信息。
在这里,传感器单元60可采用能通过测量在空间中的位置和姿势而生成传感器值的任何装置。例如,传感器单元60可以为全球定位系统(GPS)、室内GPS(IGPS)和超声波传感器中的至少一个。
路径设置单元120使用最终位置信息和初始位置信息以确定移动自主平台10需通过的移动路径。在这里,移动路径是指将自主平台10从初始位置信息移至最终位置信息需通过的路径。
路径设置单元120生成移动速度信息,其指示在每个单位时间内移动自主平台10通过移动路径需移动的速度。路径设置单元120可设置加速段信息、恒速段信息和减速段信息。路径设置单元120生成移动速度信息,其包括加速段信息、恒速段信息和减速段信息。在这里,路径设置单元120可通过接收用户经输入单元110的输入或使用预定算法(例如:程序、概率模型等)而设置加速段信息、恒速段信息和减速段信息。
路径设置单元120设置所移动的位置信息,其指示在每个单位时间内自主平台10需移至的位置和姿势。即,所移动的位置信息是指在单位时间后自主平台10已移至的位置和姿势。
路径设置单元120生成移动控制信息,其包括移动速度信息和所移动的位置信息中的至少一个。此外,路径设置单元120可设置位置单位信息,其指示在每个单位时间内需将自主平台10移至的位置和姿势;并使位置单位信息被包含于移动控制信息中。在这里,位置单位信息指在每个单位时间内需根据移动速度信息将自主平台10移动多少的信息。
速度管理单元130使用移动控制信息生成待被提供至处理单元200以移动自主平台10的缆线单位长度信息。换句话说,速度管理单元130通过基于移动控制信息设置每个单位时间内的缆线20长度以生成缆线单位长度信息。速度管理单元130将缆线单位长度信息提供至处理单元200,其可通过使用缆线单位长度信息卷绕或退绕被连至绞车70的缆线20而移动自主平台10。
此外,速度管理单元130生成缆线单位长度信息以便使下垂管理单元170解决缆线20下垂的问题,或者如果缆线20未下垂,速度管理单元130则使用移动控制信息以允许将自主平台10移向最终位置信息。
处理单元200使用从测得的绞车70(如图2所示)旋转角获得的旋转角测量值生成缆线的当前长度信息、当前位置信息和缆线操作长度信息。在这里,旋转角测量值指示在通过缆线20卷绕或退绕绞车70时绞车70的角度。换句话说,处理单元200使用绞车70的旋转角测量值来配置从绞车70退绕的缆线20长度,从而生成缆线的当前长度信息。
在这里,缆线的当前长度信息指示从绞车70退绕的缆线20长度,其为在自主平台10和区块50间连接的缆线20长度。缆线的当前长度信息可包括每个被连接至自主平台10的缆线20长度。将参照图2详细描述生成缆线的当前长度信息的处理单元200。
此外,处理单元200使用缆线的当前长度信息配置自主平台10的位置和姿势并生成当前位置信息。在这里,当前位置信息是指在区块50中通过速度管理单元130移动的自主平台10的位置和姿势。当前位置信息可以通过如x、y和z的坐标值进行表示,从而指示自主平台10的位置,且可通过如ψ、θ和 的欧拉角进行表示,从而指示自主平台10的姿势。
的欧拉角进行表示,从而指示自主平台10的姿势。
处理单元200使用当前位置信息和移动控制信息生成缆线操作长度信息。在这里,缆线操作长度信息是指与基于当前位置信息和移动控制信息需将自主平台10移至的位置和姿势相应的缆线20长度。将参照图2更详细地描述处理单元200。
下垂管理单元170使用缆线张力的测量信息确定缆线20是否下垂,且当缆线20下垂时,使用缆线张力的测量信息调整缆线。
具体地,下垂管理单元170具备从处理单元200提供至其的缆线张力的测量信息。在这里,缆线张力的测量信息是指被施加至缆线20的张力且可包括每根被连接至自主平台10的缆线20的张力信息。
下垂管理单元170设置作为被施加至缆线20的张力基准的张力基准信息,从而确定缆线20的下垂。下垂管理单元170可通过从输入单元100接收张力基准信息或使用预定算法设置张力基准信息。例如,下垂管理单元170可使用区块设计信息设置张力基准信息。
在这里,区块设计信息是指在设计区块50时用于将自主平台10固定在区块中所配置的信息,且可包括缆线固定位置值,其对应将缆线20固定至自主平台10的位置;区块固定位置值,其对应将缆线20固定至区块50的位置;以及物理特性信息,如自主平台10的大小。可通过具备用户经输入单元10输入的区块设计信息设置区块设计信息或在从与自主平台控制系统100相连的外部装置(未示出)接收到区块设计信息后由下垂管理单元170设置区块设计信息。
下垂管理单元170使用缆线张力的测量信息和张力基准信息确定缆线20的下垂。具体地,当缆线张力的测量信息小于张力基准信息时,下垂管理单元170确定缆线20有下垂。由于张力基准信息是指被施加至缆线20的、用于使缆线20不发生任何下垂的最小张力,因此当缆线张力的测量信息小于张力基准信息时可确定缆线20有下垂。
下垂管理单元170通过将缆线张力的测量信息与张力基准信息相比较而生成张力比较信息。下垂管理单元170将张力比较信息提供至处理单元200。在这里,处理单元200可使用张力比较信息拉动缆线20并防止缆线20下垂。
显示单元150可显示输入单元110、路径设置单元120、速度管理单元130、处理单元200和下垂管理单元170所进行的步骤以及输出的结果,并可显示存储于存储单元160中的数据。
例如,显示单元150可显示用户界面以具备用户输入的移动初始信息。用户可通过显示单元150检查所显示的信息并通过输入单元110输入移动初始信息。
在另一个实例中,显示单元150可显示具备初始位置信息设置和由路径设置单元120生成的移动控制信息的步骤和结果。
在另一个实例中,显示单元150可显示具备缆线的当前长度信息、当前位置信息和由处理单元200生成的缆线操作长度信息的步骤和结果。
在另一个实例中,显示单元150可显示经传感器单元60测得的传感器值。
此外,显示单元150可显示在输入单元110、路径设置单元120、速度管理单元130、处理单元200和下垂管理单元170中发生的任何错误。相应地,用户可检查通过显示单元150显示的错误并解决该错误。
显示单元150可以是阴极射线管、液晶显示器(LCD)、有机发光显示器(OLED)、发光二极管(LED)、电泳显示器(EPD)、等离子显示面板(PDP)等的任一个或是具有显示装置的计算机。此外,可使用触摸屏等而实现显示单元150与输入单元110的一体化。
存储单元160存储自主平台100的输入单元110、路径设置单元120、速度管理单元130、处理单元200和下垂管理单元170所需的数据以及输入单元110、路径设置单元120、速度管理单元130、处理单元200和下垂管理单元170所生成的数据。
例如,存储单元160可存储从输入单元110输入的最终位置信息并存储经路径设置单元120配置的初始位置信息,以及经路径设置单元120生成的移动控制信息。
在另一个实例中,存储单元160可存储由传感器单元60测得的传感器值并存储经处理单元200生成的缆线的当前长度信息、当前位置信息和缆线操作长度信息。
存储单元160可提供输入单元110、路径设置单元120、速度管理单元130、处理单元200、下垂管理单元170和显示单元150请求所需的数据。存储单元160可由一元化的存储器或多个存储器而组成。例如,存储单元160可由只读存储器(ROM)、随机存取存储器(RAM)、闪存等所构成。
图2为说明根据本发明一个实施例的一种用于控制使用缆线的自主平台的系统的处理单元详细配置的方块图。
参照图2,处理单元200包括缆线管理模块210、位置管理模块250和长度管理模块280。
缆线管理模块210使用旋转角测量值配置缆线20的长度并生成缆线的当前长度信息。该缆线管理模块210包括旋转角分析模块220、张力分析模块230和绞车控制模块240。
旋转角分析模块220使用编码器80所测得的绞车70的旋转角测量值以生成缆线当前长度信息,用以指示从绞车70退绕的缆线20长度。
例如,旋转角分析模块220可将旋转角测量值和缆线20的长度信息之间的关系表达为一个函数并将旋转角测量值插入函数中以生成缆线的当前长度信息。旋转角分析模块220也可使用长度表生成缆线的当前长度信息,其中在长度表中的缆线20长度与旋转角测量值相匹配。旋转角分析模块220将缆线的当前长度信息提供至位置管理模块250。
在这里,编码器80被连接至绞车70且通过绞车70的旋转生成旋转角测量值。此外,编码器80被连接至放出缆线20的滑轮(未示出)以测量滑轮的旋转程度或通过测量所放出缆线20的数量以生成旋转角测量值。
此外,一旦从路径设置单元120接收到长度请求信号,旋转角分析模块220则使用在移动前由被连接至自主平台10的缆线20的编码器80测得的旋转角测量值生成缆线初始长度信息。
张力分析模块230使用压力传感器90测得的张力测量值生成缆线张力的测量信息。
例如,张力分析模块230可将压力传感器90测得的张力测量值和作用于缆线20上的缆线张力间的关系表达为线性或非线性函数,并可通过将张力测量值插入函数中而生成缆线张力的测量信息。张力分析模块230也可使用张力表生成张力测量信息,其中张力表中的缆线张力与张力测量值相匹配。
在这里,压力传感器90被连接至缆线20处并通过测量作用于缆线20上的张力而生成张力测量值。压力传感器90被连至处理单元200并将张力测量值发送至处理单元200的张力分析模块230。
绞车控制模块240由绞车70来访问并控制卷绕有缆线20的绞车70以调整缆线20的长度并移动被连接至缆线20的自主平台10。例如,绞车控制模块240可使用速度管理单元130所提供的缆线单位长度信息以控制绞车70并通过卷绕或退绕缆线20而移动自主平台10。绞车控制模块240可使用下垂管理单元170所提供的张力比较信息以通过卷绕或退绕被连接至绞车70的缆线20解决缆线20的下垂问题。
位置管理模块250使用缆线的当前长度信息生成当前位置信息。为此,位置管理模块250包括预测模块260和生成模块270。
预测模块260使用任意位置信息设置缆线的任意长度信息。即,预测模块260设置任意位置信息以假定自主平台10位于固定区块50中的任意位置上。在这里,用坐标值表示任意位置信息以指示自主平台10在区块50中的虚拟位置。只要能在区块50中移动自主平台10,任意位置信息就可以是区块50中的任意位置。可通过具备用户经输入单元110输入的任意位置信息或使用预定算法而由预测模块设置任意位置信息。
预测模块260使用任意位置信息通过逆运动学(inverse kinematics)来设置任意长度信息。在这里,缆线的任意长度信息是指将区块50连接至处于任意位置信息的自主平台10的缆线20长度。
生成模块270使用缆线的任意长度信息和缆线的当前长度信息以通过正运动学(forward kinematics)生成当前位置信息。即,生成模块270通过将缆线的任意长度信息与缆线的当前长度信息相比较生成长度差值。生成模块270设置长度基准信息,其为容错的基准。在这里,生成模块270可通过具备用户经输入单元110输入的长度基准信息或通过使用预定算法而设置长度基准信息。
生成模块270可通过确定长度差值是否小于长度基准信息而生成长度确定结果信息。当长度确定结果信息显示长度差值小于长度基准信息时,生成模块270使用任意位置信息生成当前位置信息。
当长度确定结果信息显示长度差值大于或等于长度差信息时,生成模块270重新设置任意位置信息以生成当前位置信息。
长度管理模块280使用当前位置信息和移动控制信息生成缆线操作长度信息。即,长度管理模块280通过将当前位置信息与包含于移动控制信息中的所移动的位置信息相比较生成位置差信息,从而确定自主平台10是否已基于路径设置单元120设置的移动控制信息进行移动。
长度管理模块280通过添加当前位置信息、位置差信息和彼此的位置单位信息生成缆线固定位置值。此外,长度管理模块280可替代逆运动学中的缆线固定位置值以生成缆线操作长度信息。
长度管理模块280使用缆线操作长度信息生成旋转角预测信息。在这里,旋转角预测信息是指用于移动自主平台10的绞车70的旋转角。长度管理模块280通过将旋转角测量值与旋转角预测信息相比较生成移动控制信息,从而将自主平台10从自主平台10的当前位置和姿势移至自主平台10需移至的位置和姿势。
将参照图3和4描述一种让根据本发明一个实施例的使用缆线的自主平台控制系统来控制自主平台的方法。
图3和4为说明根据本发明一个实施例的一种用于控制使用缆线的自主平台的方法的详细流程图。
参照图3和4,自主平台控制系统100使用传感器单元60测得的传感器值或缆线初始长度信息生成初始位置信息(S310)。
自主平台控制系统100使用最终位置信息和初始位置信息生成移动控制信息,其包括移动速度信息、所移动的位置信息和位置单位信息中的至少一个(S320)。
然后,自主平台控制系统100使用移动控制信息生成缆线单位长度信息并根据缆线单位长度信息通过放松或拉动多根被连接至自主平台10的缆线20而移动自主平台10。
自主平台控制系统100使用绞车70的旋转角测量值生成缆线的当前长度信息(S330)。
自主平台控制系统100设置任意位置信息,其指示自主平台10在区块50中所处的任意位置(S340)。
自主平台控制系统100通过将任意位置信息代入逆运动学中来设置缆线的任意长度信息(S350)。
自主平台控制系统100通过比较缆线的当前长度信息和缆线的任意长度信息生成长度差值(S360)。具体地,生成模块270可限定长度差值为[等式1]所示。
[等式1]
D=Lm-lk
在这里,D为长度差值,Lm为缆线的当前长度信息,且Lk为缆线的任意长度信息。相应地,自主平台控制系统100的生成模块270通过将旋转角分析模块220生成的缆线当前长度信息输入[等式1]的Lm,并将预测模块260设置的缆线任意长度信息输入[等式1]的Lk中而生成长度差值。在这里,生成模块270可生成与每根被连接至自主平台10的缆线20相对应的长度差值。
自主平台控制系统100确定长度差值是否小于长度基准信息(S370)。
当确定长度差值大于或等于长度基准信息时,自主平台控制系统100可通过返回至步骤S340而重新设置任意位置信息(S380)。
当确定长度差值小于长度基准信息时,自主平台控制系统100使用任意位置信息和长度差值生成当前位置信息(S390)。
即,自主平台控制系统100的生成模块270可使用[等式2]生成当前位置信息。
[等式2]
Xk+1=Xk+JM#[D]
在这里,Xk+1是指关于任意位置信息Xk使用移动控制信息将自主平台10移至的位置和姿势,JM为缆线20运动学形状所确定的雅可比矩阵(Jacobian matrix),且D为长度差值。
生成模块270可将[等式2]转换成[等式3]。
[等式3]
在这里,表示将Xk+1减去Xk获得的值进行了微分,且 表示将Lm减去Lk获得的值进行了微分。之后,生成模块270可将[等式3]转换成[等式4],从而生成当前位置信息。
表示将Lm减去Lk获得的值进行了微分。之后,生成模块270可将[等式3]转换成[等式4],从而生成当前位置信息。
[等式4]
在这里,JML为单位矩阵(I),如图5和6所示,sn为从第n根缆线20被固定至自主平台10的位置An至第n根缆线20被固定至区块50的位置Bn的单位矢量,且bn为从机器人中心至An的矢量,且N为自然数。因此,生成模块270使用长度差值和区块设计信息的区块固定位置值计算sn和bn。此外,生成模块270通过将所计算的sn和bn代入[等式4]而生成当前位置信息。
自主平台控制系统100通过将当前位置信息与移动控制信息中所移动的位置信息相比较而生成位置差信息并使用位置差信息生成缆线操作长度信息(S410)。
即,自主平台控制系统100的长度管理模块280可将缆线操作长度信息限定为[等式5]所示。
[等式5]
Whereas,An=(wxn,wyn,wzn),Bn=(wXn,wYn,wZn)
在这里,L为缆线操作长度信息,如图6所示,An为第n根缆线20被固定至自主平台10处的缆线固定位置值,Bn为第n根缆线20被固定至区块50处的区块固定位置值,且N为指示被连接至自主平台10的缆线20数量的自然数。wxn,wyn,wzn为第n根缆线20被固定至自主平台10处的整体坐标系统中所限定的缆线固定位置值,且wXn,wYn,wZn为第n根缆线20被固定至区块50处的整体坐标系统中所限定的区块固定位置值。在这里,由于Bn为第n根缆线20被固定至区块50的位置,因此即使当自主平台10移动时其也不会改变,可使用区块设计信息的区块固定位置值检查Bn。
长度管理模块280可将An限定为如[等式6]所示。
[等式6]
在这里,R为旋转矩阵且T为平移矩阵。bxn、byn和bzn为在第n根缆线20被固定至自主平台10处的局部坐标系统中所限定的平台固定位置值。在这里,由于bxn、byn和bzn确定缆线20关于自主平台10的固定位置点,因此即使当自主平台移动时其也不会改变,且可使用包含于区块设计信息中的平台固定位置值检查bxn、byn和bzn。cθ和sθ可以为cosθ和sinθ。Px、Py和Pz指示自主平台10在整体坐标系统中的位置和姿势。
相应地,长度管理模块280通过将区块设计信息的平台固定位置值代入bxn、byn和bzn中并将添加当前位置信息、位置差信息和彼此的位置单位信息而获得的信息代入Px、Py和Pz中而生成缆线固定位置值An。
长度管理模块280通过将生成的缆线固定位置值代入[等式5]中的An并将区块设计信息的区块固定位置值代入[等式5]中国的Bn中以生成缆线操作长度信息。
自主平台控制系统100生成缆线张力的测量信息,其指示作用于缆线20上的张力(S420)。
自主平台控制系统100设置作为确定缆线20下垂基准的张力基准信息(S430)。
自主平台控制系统100确定缆线张力的测量信息是否小于张力基准信息(S440)。
如果确定缆线张力的测量信息等于或大于或等于张力基准信息,自主平台控制系统100的下垂管理单元170确定缆线20中未发生任何下垂并调整缆线20的长度以移动自主平台10(S450)。将参考步骤S470详细描述一种调整缆线20长度的方法。
如果确定缆线张力的测量信息小于张力基准信息,自主平台控制系统100使用通过将缆线张力的测量信息与张力基准信息相比较生成的张力比较信息调整缆线20(S460)。例如,自主平台控制系统100的下垂管理单元170可将张力比较信息限定为如[等式7]所示。
[等式7]
TS=Kc*((Tn)c-(Tn)c)
在这里,TS为张力比较信息,Kt为用于补偿张力信息的张力比例增益,(Tn)t为张力基准信息,且(Tn)c为缆线张力测量信息。在这里,下垂管理单元170可通过具备用户输入的张力比例增益或使用预定算法设置张力比例增益。
下垂管理单元170通过将张力基准信息代入[等式7]的(Tn)t并将缆线张力的测量信息代入(Tn)c而设置张力比较信息。自主平台控制系统100可使用张力比较信息以解决缆线20中存在的下垂问题。
自主平台控制系统100可使用缆线操作长度信息生成旋转角预测信息并使用通过将旋转角预测信息与旋转角测量值相比较而生成的移动控制信息调整缆线20的长度(S470)。
即,自主平台控制系统100的长度管理模块280可将移动控制信息限定为[等式8]所示。
[等式8]
CL=Kp*((Jn)t-(Jn)c)
在这里,CL为移动控制信息,Kp为用于补偿旋转角信息的旋转角比例增益、(Jn)t为旋转角预测信息且(Jn)c为旋转角测量值。在这里,长度管理单元280可通过具备用户输入的长度比例增益或使用预定算法设置长度比例增益。
长度管理单元280通过将旋转角预测信息代入[等式8]的(Jn)t中并将旋转角测量信息代入(Jn)c中而设置移动控制信息。
自主平台控制系统100控制自主平台10的速度并使用移动控制信息和移动控制信息的移动速度信息移动自主平台10。
之后,如果缆线张力的测量信息大于张力基准信息且当前位置信息和最终位置信息之间的比较值小于位置基准信息,自主平台控制系统100的速度管理单元130则会停止移动自主平台10。在这里,位置基准信息为作为通过将自主平台需移至的位置和姿势与自主平台的当前位置和姿势相比较而确定容许误差的基准,且可通过具备用户输入的位置基准信息或使用预定算法而进行设置。
在下文中,将参照图5至7描述根据一个实施例的一种用于控制使用缆线的自主平台的系统。
图5为说明根据本发明一个实施例的一种用于控制使用缆线的自主平台的系统的方块图。
参照图5,自主平台控制系统100包括输入单元110、路径设置单元120、速度管理单元130、绞车控制单元、位置管理单元300、处理单元200、显示单元150和存储单元160。
输入单元110可具备经用户输入的最终位置信息。在这里,最终位置信息指示在区块50中需将自主平台10移至的位置和姿势。在这里,可通过包括x、y和z的坐标值表示自主平台10的位置以指示自主平台10在区块50中的所在位置。在这里,自主平台10的位置指示自主平台10在区块50中的所在位置。可通过自主平台10经缆线20所倾斜的角度表示自主平台10的姿势。最终位置信息可包括基于自主平台10的局部坐标值和基于区块50中任一点的整体坐标值中的至少一个。
此外,输入单元110可具备用户输入在其中的区块设计信息。在这里,区块设计信息可包括用于缆线20被固定至自主平台10位置处的缆线固定位置值,缆线20被固定至区块50所处位置的区块固定位置值和物理特性信息,如自主平台10的大小。可从与自主平台控制系统100相连的外部装置(未示出)接收区块设计信息。
路径设置单元120使用最终位置信息和初始位置信息生成自主平台10的移动控制信息。在这里,初始位置信息是指在移动自主平台10前自主平台10的位置和姿势,且以坐标值进行表示,如最终位置信息一样。移动控制信息是指将自主平台10从初始位置信息移至最终位置信息所需的控制信息。
特别地,路径设置单元120在移动前设置指示自主平台10位置和姿势的初始位置信息。路径设置单元120可使用通过传感器单元60输入的传感器值或使用位置管理单元300提供的缆线初始长度信息设置初始位置信息。在这里,缆线初始长度信息是指在移动自主平台10前从绞车70退绕的缆线20长度。
路径设置单元120使用最终位置信息和初始位置信息以确定移动自主平台10需通过的移动路径。在这里,移动路径是指将自主平台10从初始位置信息移至最终位置信息需通过的路径。
路径设置单元120生成移动速度信息,其指示在每个单位时间内移动自主平台10通过移动路径所需的速度。路径设置单元120生成移动控制信息,其包括加速段信息、恒速段信息和减速段信息。在这里,路径设置单元120可通过接收用户经输入单元110的输入或使用预定算法(例如:程序、概率模型等)而设置加速段信息、恒速段信息和减速段信息。
路径设置单元120设置所移动的位置信息,其指示在每个单位时间内需将自主平台10移至的位置和姿势。即,所移动的位置信息是指在单位时间后自主平台10需要已移至的位置和姿势。
路径设置单元120设置移动控制信息,其包括移动速度信息和所移动的位置信息中的至少一个。此外,路径设置单元120可设置位置单位信息,其指示在每个单位时间内需将自主平台10移至的位置和姿势;并使位置单位信息被包含于移动控制信息中。在这里,位置单位信息是指在每个单位时间内需根据移动速度信息将自主平台10移动多少的信息。
路径设置单元120设置与最终位置信息相应的旋转角处理信息。在这里,旋转角处理信息可显示绞车70的旋转角,其对应于在每个单位时间内需将自主平台100移至的位置和姿势。
速度管理单元130使用移动控制信息移动自主平台10。换句话说,速度管理单元130可基于移动速度信息设置每个单位时间内缆线20的长度,从而生成缆线单位长度信息。速度管理单元130将缆线单位长度信息提供至绞车控制单元140。
绞车控制单元140由绞车70来访问并控制卷绕有缆线20的绞车70以调整缆线20的长度,从而移动被连接至缆线20的自主平台10。例如,绞车控制单元140可使用速度管理单元130提供的缆线单位长度信息控制绞车70以卷绕或退绕缆线20以移动自主平台10。
位置管理单元300使用旋转角测量信息和缆线张力信息以生成当前位置信息。换句话说,位置管理单元300使用用于缆线20和自主平台10的旋转角测量信息和作用于缆线20上的缆线张力信息以生成缆线的当前长度信息。在这里,旋转角测量信息是指当绞车70卷绕或退绕缆线20时绞车70的角度。缆线张力信息是指作用于缆线20上的张力且可包括用于每根被连接至自主平台10的缆线20的张力信息。缆线的当前长度信息是指从绞车70退绕的缆线20长度,其为将自主平台10与区块50相连接的缆线20的长度。缆线的当前长度信息可包括用于每根被连接至自主平台10的缆线的长度。
位置管理单元300使用缆线的当前长度信息生成当前位置信息。在这里,当前位置信息可以指当前自主平台10在区块50中所处的位置和姿势。将参照图2更详细地描述位置管理单元300。
处理单元200使用当前位置信息生成缆线操作长度信息和旋转角控制信息。即,处理单元200使用当前位置信息和移动控制信息中的所移动的位置信息生成缆线操作长度信息,其指示在需将自主平台10移至的位置和姿势处的缆线20长度。在这里,旋转角控制信息是指用于将自主平台10移至所移动的位置信息的绞车70旋转角。将参照图3更详细地描述处理单元。
显示单元150可显示输入单元110、路径设置单元120、速度管理单元130、绞车控制单元140、位置管理单元300和处理单元200所进行的步骤以及输出的结果,并可显示存储于存储单元160中的数据。
例如,显示单元150可显示用户界面以具备用户输入的移动初始信息。用户可通过显示单元150检查所显示的信息并通过输入单元110输入移动初始信息。
在另一个实例中,显示单元150可显示具备初始位置信息和经路径设置单元120设置的移动控制信息的步骤和结果,并显示传感器单元60所测得的传感器值。
在另一实例中,显示单元150可显示具备经位置管理单元300生成的当前长度信息和当前位置信息的步骤和结果,并显示具备经处理单元200生成的缆线操作长度信息的步骤和结果。
此外,显示单元150可显示在输入单元110、路径设置单元120、速度管理单元130、绞车控制单元140、位置管理单元300和处理单元200中发生的任何错误。相应地,用户可检查经显示单元150显示的错误并解决该错误。
存储单元160存储移动自主平台100所需或生成的数据。这就是说,存储单元160可存储自主平台控制系统100组件元件,即输入单元110、路径设置单元120、速度管理单元130、绞车控制单元140、位置管理单元300和处理单元200所需或生成的数据。
例如,存储单元160可存储通过输入单元110输入的最终位置信息以及通过传感器单元60测得的传感器值。
在另一实例中,存储单元160可存储位置管理单元300生成的当前长度信息和当前位置信息并存储处理单元200生成的缆线操作长度信息。
此外,存储单元160可根据输入单元110、路径设置单元120、速度管理单元130、绞车控制单元140、位置管理单元300、处理单元200或显示单元150的请求提供所需的数据。
图6为说明图5所示的用于控制使用缆线的自主平台的系统的位置管理单元详细配置的方块图。
参照图6,位置管理单元300包括旋转角分析模块220、张力分析模块230、长度设置模块310、操作模块320和生成模块330。
旋转角分析模块220使用编码器80所测得的绞车70的旋转角测量值以生成指示从绞车70退绕的缆线20长度的缆线的基本长度信息。
例如,旋转角分析模块220可将旋转角测量信息和缆线20长度信息间的关系表达为一个函数并将旋转角测量信息插入函数中以生成缆线的基本长度信息。旋转角分析模块220也可使用长度表生成缆线的基本长度信息,其中在长度表中的缆线20长度与旋转角信息相匹配。
在这里,编码器80被连接至绞车70且通过绞车70的旋转生成旋转角测量信息。此外,编码器80被连接至放出缆线20的滑轮(未示出)以测量滑轮的旋转程度或通过测量所放出缆线20的数量以生成旋转角测量信息。
此外,一旦从路径设置单元120接收到长度请求信号,旋转角分析模块220则在移动前,通过被连接至绞车70车轴的编码器80测量被安装于自主平台中绞车70的旋转角测量信息以生成缆线初始长度信息。此外,旋转角分析模块220将缆线初始长度信息提供至路径设置单元120。
张力分析模块230使用压力传感器90测得的张力测量信息生成缆线张力的信息。
例如,张力分析模块230可将压力传感器90测得的张力测量信息和作用于缆线20上的缆线张力间的关系表达为线性或非线性函数并可通过将张力测量信息插入函数中而生成缆线张力信息。张力分析模块230也可使用张力表生成缆线张力信息,其中张力表中作用于缆线20上的缆线张力与张力测量信息相匹配。
在这里,压力传感器90被连接至缆线20处并通过测量作用于缆线20上的张力而生成张力测量信息。压力传感器90被连至张力分析模块230并将张力测量信息发送至张力分析模块230。
长度设置模块310使用缆线的基本长度信息和缆线张力信息以生成缆线的当前长度信息。换句话说,长度设置模块310可通过反映缆线基本长度信息中的缆线张力信息以生成缆线的当前长度信息。
因此,根据本发明的使用缆线20的自主平台控制系统100可确定自主平台10在区块50中的精确位置和姿势,这是因为可使用作用于缆线20上的张力来生成缆线的当前长度信息。
操作模块320设置自主平台10的任意位置信息,然后则设置用于任意位置信息的任意长度信息。具体地,操作模块320设置任意位置信息以假定自主平台10位于区块50中的任意位置,其中自主平台10被固定至该区块50。在这里,任意位置信息是指自主平台10处在区块50中的虚拟位置且可以坐标值进行表示。任意位置信息可以是任何位置,只要自主平台可以被移至区块50中的该位置处。可通过具备用户通过输入单元110输入的任意位置信息或使用预定算法由操作模块320设置任意位置信息。
预测模块320使用任意位置信息以通过逆运动学设置任意长度信息。在这里,缆线的任意长度信息可指相关于任意位置信息从绞车70退绕的缆线20长度且可包括被连接至自主平台10的多根缆线20的长度。
生成模块330使用缆线的任意长度信息和缆线的当前长度信息以通过正运动学生成当前位置信息。换句话说,生成模块330通过将缆线的任意长度信息与缆线操作长度信息相比较生成长度差值。生成模块270可通过将缆线的任意长度信息与缆线的当前长度信息相比较而设置作为容错基准的长度基准信息。在这里,生成模块330可通过具备用户经输入单元110输入的长度基准信息或通过使用预定算法而设置长度基准信息。
生成模块330确定长度差值是否小于长度基准信息。当确定长度差值小于长度基准信息时,生成模块330使用任意位置信息生成当前位置信息。
然而,当确定长度差值大于或等于长度基准信息时,生成模块330使用长度差值重新设置任意位置信息,从而生成当前位置信息。
图7为详细说明图5所示的用于控制使用缆线的自主平台的系统的处理单元的方块图。
参照图7,处理单元200包括长度分析模块211、预测模块212和确定模块213。
长度分析模块211使用当前位置信息和移动控制信息生成缆线操作长度信息。即,长度分析模块211通过将当前位置信息与包含于移动控制信息中所移动的位置信息相比较生成位置差信息,从而确定是否已基于路径设置单元120设置的移动控制信息移动自主平台10。
此外,长度分析模块211通过添加当前位置信息、位置差信息和彼此的包含于移动控制信息中的位置单位信息而生成缆线操作长度信息。在这里,缆线操作长度信息是指将区块50与自主平台10相连的缆线20长度,其中自主平台10位于每个单位时间需将自主平台10移至的位置和姿势。同时,长度分析模块211可使用当前位置信息、位置差信息和移动控制信息通过逆运动学生成缆线操作长度信息。
预测模块212使用缆线操作长度信息生成旋转角预测信息,其是指用于移动自主平台10的自主平台10和绞车70的旋转角。
换句话说,预测模块212可生成与缆线操作长度信息相应的张力预测信息。预测模块212使用缆线操作长度信息和张力预测信息生成旋转角预测信息。例如,预测模块212可将旋转角信息和缆线20的长度信息间的关系表达为一个函数并将缆线操作长度信息输入该函数以生成旋转角预测信息。此外,预测模块212也可使用与长度表中缆线操作长度信息相匹配的旋转角信息生成旋转角预测信息。
确定模块213使用旋转角测量信息和旋转角预测信息生成旋转角控制信息。即,确定模块213可通过将旋转角测量信息与旋转角预测信息相比较而生成旋转角控制信息,从而将自主平台10从当前自主平台10在区块50中所在的位置和姿势移至自主平台10需要移至的位置和姿势。
将参照图8和9描述根据本发明一个实施例的一种用于让使用缆线的自主平台控制系统控制自主平台的方法。
图8和9为说明根据本发明一个实施例的一种用于控制使用缆线的自主平台的方法的详细流程图。
参照图8和9,自主平台控制系统100在移动自主平台10之前设置指出自主平台位置和姿势的初始位置信息(S810)。
自主平台控制系统100使用最终位置信息和初始位置信息设置移动控制信息,其包括移动速度信息、所移动的位置信息和位置单位信息中的至少一个(S820)。然后,自主平台控制系统100使用移动控制信息中的移动速度信息生成缆线单位长度信息,并使用移动速度信息和缆线单位长度信息放松或拉动多个被连接至自主平台10的缆线20而移动自主平台10。
自主平台控制系统100使用绞车70的旋转角测量信息生成缆线的基本长度信息(S830)。
自主平台控制系统100生成作用于缆线20上的缆线张力信息(S840)。
自主平台控制系统100使用缆线的基本长度信息和缆线张力信息生成缆线的当前长度信息(S850)。
自主平台控制系统100设置自主平台10的任意位置信息以假定自主平台10位于区块50中的任意位置(S860)。
自主平台控制系统100通过将任意位置信息代入逆运动学中设置缆线的任意长度信息(S870)。
自主平台控制系统100通过比较缆线的当前长度信息和缆线的任意长度信息生成长度差值(S880)。
具体地,自主平台控制系统100的生成模块330可限定长度差值为[等式9]所示。
[等式9]
D=Lm一Lk
在这里,D为长度差值,Lm为缆线的当前长度信息且Lk为缆线的任意长度信息。相应地,生成模块330通过将长度设置模块310生成的缆线当前长度信息输入[等式1]的Lm,并将操作模块320设置的缆线任意长度信息输入[等式1]的Lk中而生成长度差值。在这里,生成模块330可生成与每根被连接至自主平台10的缆线20相应的长度差值。
自主平台控制系统100确定长度差值是否小于长度基准信息(S890)。
当确定长度差值大于或等于长度基准信息时,自主平台控制系统100可通过返回至步骤S860并使用长度差值而重新设置任意位置信息(S910)。
当确定长度差值小于长度基准信息时,自主平台控制系统100通过输入正运动学中的任意位置信息而生成当前位置信息(S920)。
即,自主平台控制系统100的生成模块330可使用[等式10]生成当前位置信息。
[等式10]
Xk+l=Xk+JM#[D]
在这里,Xk+1是指关于任意位置信息Xk使用移动控制信息将自主平台10移至的位置和姿势,JM为缆线20运动学形状所确定的雅可比矩阵且D为长度差值。
生成模块330可将[等式10]转换成[等式11]。
[等式11]
在这里, 表示将Xk+1减去Xk获得的值进行了微分,且
表示将Xk+1减去Xk获得的值进行了微分,且 表示将Lm减去Lk获得的值进行了微分。之后,生成模块330可将[等式11]转换成[等式12],从而生成当前位置信息。
表示将Lm减去Lk获得的值进行了微分。之后,生成模块330可将[等式11]转换成[等式12],从而生成当前位置信息。
[等式12]
在这里,JML为单位矩阵(I),如图6和7所示,sn为从第n根缆线20被固定至自主平台10的位置An至第n根缆线20被固定至区块50的位置Bn的单位矢量,且bn为从机器人中心至An的矢量,且N为自然数。
因此,生成模块330使用长度差值和区块设计信息的区块固定位置值计算sn和bn。此外,生成模块330通过将所计算出的sn和bn代入[等式12]而生成当前位置信息。
自主平台控制系统100通过添加当前位置信息、位置差信息和彼此的移动控制信息的位置单位信息并将该添加输入至逆运动学中而生成缆线操作长度信息(S930)。
即,自主平台控制系统100的长度分析模块211可将缆线操作长度信息限定为[等式13]所示。
[等式13]
whereas,An=(wxn,wyn,wzn),Bn=(wXn,wYn,wZn)
在这里,L为缆线操作长度信息,如图7所示,An为缆线20被固定至自主平台10处的缆线固定位置值,Bn为缆线20被固定至区块50处的区块固定位置值,且N为指示被连接至自主平台10的缆线20数量的自然数。wxn,wyn,wzn为第n根缆线20被固定至自主平台10处的整体坐标系统中所限定的缆线固定位置值,且wXn,wYn,wZn为第n根缆线20被固定至区块50处的整体坐标系统中所限定的区块固定位置值。在这里,由于Bn为缆线20被固定至区块50的位置,因此即使当自主平台10移动时其也不会改变,可使用区块设计信息的区块固定位置值检查Bn。
长度分析模块211可将An限定为如[等式14]所示。
[等式14]
在这里,R为旋转矩阵且T为平移矩阵。bxn、byn和bzn为在第n根缆线20被固定至自主平台10处的局部坐标系统中所限定的平台固定位置值。在这里,由于bxn、byn和bzn确定缆线20关于自主平台10的固定位置点,因此即使当自主平台移动时其也不会改变,且可使用包含于区块设计信息中的平台固定位置值检查bxn、byn和bzn。cθ和sθ分别为cosθ和sinθ。Px、Py和Pz指示自主平台10在整体坐标系统中的位置和姿势。
相应地,长度分析模块211通过将区块设计信息的平台固定位置值代入bxn、byn和bzn中并将添加当前位置信息、位置差信息和彼此的位置单位信息而获得的信息代入Px、Py和Pz中而生成缆线固定位置值。长度分析模块211通过将生成的缆线固定位置值代入An并将区块设计信息的区块固定位置值代入[等式13]的Bn中以生成缆线操作长度信息。
自主平台控制系统100生成对应于缆线操作长度信息的张力预测信息(S940)。
自主平台控制系统100使用缆线操作长度信息和张力预测信息生成旋转角预测信息(S950)。
自主平台控制系统100通过将旋转角测量信息与旋转角预测信息相比较以生成旋转角控制信息(S960)。
即,自主平台控制系统100的预测模块212可将旋转角控制信息限定为[等式15]所示。
[等式15]
CL=Kp*((Jn)t-(Jn)c)
在这里,CL为旋转角控制信息,Kp为用于补偿旋转角信息的旋转角比例增益、(Jn)t为旋转角预测信息且(Jn)c为旋转角测量信息。在这里,预测模块212可通过具备用户输入的旋转角比例增益或使用预定算法设置旋转角比例增益。
预测模块212通过将旋转角预测信息代入[等式15]的(Jn)t中并将旋转角测量信息代入(Jn)c中而设置旋转角控制信息。
自主平台控制系统100使用旋转角控制信息和移动控制信息的移动速度信息将自主平台10移至最终位置信息(S970)。
自主平台控制系统100确定旋转角度差信息是否小于旋转角基准信息(S980)。即,自主平台控制系统100的路径设置单元120可通过从旋转角处理信息减去旋转角预测信息而设置旋转角度差信息,从而确定自主平台10是否已到达最终位置信息。路径设置单元120确定旋转角度差信息是否小于旋转角基准信息。在这里,旋转角基准信息是作为自主平台10是否已到达最终位置信息的判断基准的信息,且可通过具备用户输入的旋转角基准信息或使用预定算法经路径设置单元120进行设置。
当自主平台控制系统100的路径设置单元120确定旋转角度差信息小于旋转角基准信息时,自主平台10停止移动,这是因为自主平台已到达了最终位置信息(S990)。
当自主平台控制系统100的路径设置单元120确定旋转角度差信息大于或等于旋转角基准信息时,自主平台10未到达最终位置信息,因此可从步骤S80重复该方法以移动自主平台10直到旋转角度差信息小于旋转角基准信息(S1010)。
虽然已描述了本发明的特定实施例,但本领域的普通技术人员应理解的是可在不脱离下面所附权利要求限定的本发明技术思想和范围的情况下对本发明进行各种修改和排列。
工业实用性
根据本发明一个实施例的用于控制使用缆线的自主平台的系统和方法可防止被连至自主平台的缆线下垂。
此外,根据本发明一个实施例的用于控制使用缆线的自主平台的系统和方法可控制作用于缆线上的张力,从而防止缆线下垂。
此外,根据本发明一个实施例的用于控制使用缆线的自主平台的系统和方法可控制缆线的速度,因此可将自主平台移至所需位置和姿势。
此外,根据本发明一个实施例的用于控制使用缆线的自主平台的系统和方法可精确地确定被固定在区块中的缆线长度。
此外,根据本发明一个实施例的用于控制使用缆线的自主平台的系统和方法可使用作用于缆线上的张力精确地确定被固定到自主平台和区块的缆线长度。
Claims (29)
1.一种用于控制与缆线连接的自主平台的系统,所述系统包括:
路径设置单元,其被配置成使用最终位置信息和初始位置信息以生成移动控制信息;
速度管理单元,其被配置成通过使用所述移动控制信息控制所述自主平台的速度以移动所述自主平台;
处理单元,其被配置成通过使用关于所述缆线和所移动的自主平台的旋转角测量值以生成当前位置信息,并被配置成通过使用当前位置信息和所述移动控制信息以生成缆线操作长度信息;以及
下垂管理单元,其被配置成一旦生成所述缆线操作长度信息时,使用作用于所述缆线上的缆线张力的测量信息以确定所述缆线的下垂,并被配置成当确定已存在所述缆线的下垂时,使用所述缆线张力的测量信息以调整所述缆线。
2.根据权利要求1所述的系统,其中所述下垂管理单元被配置成设置作为确定所述缆线下垂基准的张力基准信息,当所述缆线张力的测量信息小于所述张力基准信息时确定所述缆线已下垂,并使用所述缆线张力的测量信息以调整所述缆线。
3.根据权利要求2所述的系统,其中所述下垂管理单元被配置成通过将所述缆线张力的测量信息与所述张力基准信息相比较以生成张力比较信息,并使用所述张力比较信息以拉动所述缆线。
4.根据权利要求1或2所述的系统,其中所述处理单元包括:
缆线管理模块,其被配置成通过使用所述旋转角的测量值设置所述缆线的长度以生成所述缆线的当前长度信息;
位置管理模块,其被配置成使用所述缆线的当前长度信息以生成当前位置信息;
长度管理模块,其被配置成通过使用当前位置信息和所述移动控制信息中的所移动的位置信息以生成所述缆线操作长度信息;以及
绞车控制模块,其被配置成通过使用所述缆线操作长度信息控制绞车以卷绕或退绕所述缆线而移动所述自主平台,以解决所述缆线的下垂问题,
其中所移动的位置信息是指在每个单位时间内需将所述自主平台移至的位置和姿势。
5.根据权利要求4所述的系统,其中所述缆线管理模块包括:
旋转角分析模块,其被配置成通过使用经被连接至所述缆线的编码器测量的所述旋转角测量值以生成所述缆线的当前长度信息;以及
张力分析模块,其被配置成使用经被连接至所述缆线的压力传感器测量的张力测量值以生成张力测量信息。
6.根据权利要求4所述的系统,其中所述位置管理模块包括:
预测模块,其被配置成设置任意位置信息,该任意位置信息指示在所述自主平台所处的区块中的任意位置,并通过使用所述任意位置信息设置所述缆线的任意长度信息;以及
生成模块,其被配置成使用所述缆线的任意长度信息和所述缆线的当前长度信息以生成当前位置信息。
7.根据权利要求6所述的系统,其中所述生成模块被配置成通过将所述缆线的任意长度信息与所述缆线的当前长度信息相比较以生成长度差值,确定所述长度差值是否小于所述长度基准信息,并当确定所述长度差值小于所述长度基准信息时使用所述任意位置信息以生成当前位置信息。
8.根据权利要求6所述的系统,其中所述生成模块被配置成,当确定所述长度差值大于或等于所述长度基准信息时使用所述长度差值以重新设置所述任意位置信息。
9.一种用于控制与缆线连接的自主平台的系统,所述系统包括:
路径设置单元,其被配置成使用最终位置信息和初始位置信息以设置移动控制信息;
速度管理单元,其被配置成通过使用所述移动控制信息控制所述自主平台的速度以移动所述自主平台;
位置管理单元,其被配置成通过使用相对于所述缆线和所移动的自主平台的旋转角测量信息并使用作用于所述缆线上的缆线张力信息以生成所述缆线的当前长度信息,且被配置成通过使用所述缆线的当前长度信息以生成所移动的自主平台的当前位置信息;以及
处理单元,其被配置成通过使用当前位置信息和所述移动控制信息以生成缆线操作长度信息并通过使用所述缆线操作长度信息和所述旋转角测量信息以生成旋转角控制信息。
10.根据权利要求9所述的系统,其中所述移动控制信息包括在每个单位时间内所述自主平台需移动的移动速度信息以及所移动的位置信息中的至少一个。
11.根据权利要求10所述的系统,其中所述处理单元包括:
分析模块,其被配置为使用当前位置信息和所移动的位置信息以生成所述缆线操作长度信息;
预测模块,其被配置成使用所述缆线操作长度信息以生成旋转角预测信息;以及
确定模块,其被配置成通过将所述旋转角预测信息与所述旋转角测量信息相比较以生成所述旋转角控制信息。
12.根据权利要求11所述的系统,其中所述预测模块被配置成生成与所述缆线操作长度信息相对应的张力预测信息且通过使用所述缆线操作长度信息和所述张力预测信息以生成所述旋转角预测信息。
13.根据权利要求9所述的系统,其中所述位置管理单元包括:
旋转角分析模块,其被配置成通过使用经连接至所述缆线的编码器测量的所述旋转角测量信息以生成所述缆线的基本长度信息;
张力分析模块,其被配置成使用经连接至所述缆线的压力传感器测量的张力测量信息以生成缆线张力信息;以及
长度设置模块,其被配置成通过使用所述缆线的基本长度信息以及所述缆线张力信息设置所述缆线的长度以生成所述缆线的当前长度信息。
14.根据权利要求13所述的系统,其中所述位置管理单元还包括:
操作模块,其被配置成设置任意位置信息,该任意位置信息指示所述自主平台在区块中所在位置,并通过使用所述任意位置信息设置任意长度信息;以及
生成模块,其被配置成通过将所述缆线的任意长度信息与所述缆线的当前长度信息相比较以生成长度差值,并当所述长度差值小于长度基准信息时将所述任意位置信息设置为当前位置信息。
15.根据权利要求14所述的系统,其中所述生成模块被配置成当所述长度差值大于或等于所述长度基准信息时,使用所述长度差值以重新设置所述任意位置信息。
16.一种用于控制使用缆线的自主平台的方法,所述自主平台由一种用于控制使用缆线的自主平台的系统所控制,所述方法包括:
(a)使用最终位置信息和初始位置信息生成所述自主平台的移动控制信息,并使用所述移动控制信息移动所述自主平台;
(b)通过使用被连接至所述缆线的绞车旋转角测量值而设置所述自主平台的位置和姿势以生成当前位置信息;
(c)通过使用当前位置信息而设置所述缆线的长度以生成缆线操作长度信息;
(d)使用作用于所述缆线上的缆线张力的测量信息以确定所述缆线的下垂,并当存在所述缆线的下垂时,使用所述缆线张力的测量信息以调整所述缆线;以及
(e)使用所述移动控制信息控制所述自主平台的速度以移动所述解决缆线下垂问题的自主平台。
17.根据权利要求16所述的方法,其中,所述步骤(d)包括:
通过测量被连至所述自主平台的缆线的张力以生成缆线张力的测量信息;
设置作为确定所述缆线下垂基准的张力基准信息;以及
当所述缆线张力的测量信息小于所述张力基准信息时确定所述缆线已下垂,并使用所述缆线张力的测量信息以调整所述缆线。
18.根据权利要求17所述的方法,其中,所述步骤(b)包括:
(b1)通过使用所述旋转角测量值设置所述缆线的长度以生成所述缆线的当前长度信息;以及
(b2)使用所述缆线的当前长度信息通过正运动学生成当前位置信息。
19.根据权利要求18所述的方法,其中,所述步骤(b2)包括:
设置在所述自主平台所处区块中指示任意位置的任意位置信息;
通过使用所述任意位置信息设置所述缆线的任意长度信息;以及
使用所述缆线的任意长度信息和所述缆线的当前长度信息生成当前位置信息。
20.根据权利要求19所述的方法,其中通过使用所述缆线的任意长度信息和所述缆线的当前长度信息生成当前位置信息的步骤包括:
通过将所述缆线的任意长度信息与所述缆线的当前长度信息相比较生成长度差值;
通过确定所述长度差值是否小于长度基准信息以生成长度确定结果信息;以及
当所述长度确定结果信息显示所述长度差值小于所述长度基准信息时,使用所述任意位置信息生成当前位置信息。
21.根据权利要求19所述的方法,其中通过使用所述缆线的任意长度信息和所述缆线的当前长度信息生成当前位置信息的步骤还包括:当所述长度确定结果显示所述长度差值大于或等于所述基准信息时,使用长度差值重新设置所述任意位置信息。
22.根据权利要求17所述的方法,其中所述步骤(c)包括使用当前位置信息通过逆运动学生成所述缆线操作长度信息。
23.一种用于控制使用缆线的自主平台的方法,所述自主平台由一种用于控制使用缆线的自主平台的系统所控制,所述方法包括:
(a)使用最终位置信息和初始位置信息设置移动控制信息,并使用所述移动控制信息移动所述自主平台;
(b)使用相对于缆线和所移动的自主平台的旋转角测量信息和作用于所述缆线上的缆线张力信息生成所述缆线的当前长度信息;
(c)使用所述缆线的当前长度信息生成所移动的自主平台的当前位置信息;
(d)使用当前位置信息和移动控制信息生成缆线操作长度信息;
(e)使用设置缆线操作长度信息和旋转角测量信息的旋转角控制信息移动所述自主平台。
24.根据权利要求23所述的方法,其中,所述步骤(a)包括:
使用最终位置信息和初始位置信息设置所述移动控制信息,其包括在每个单位时间内所述自主平台需移动的移动速度信息以及所移动的位置信息中的至少一个;以及
使用所述移动控制信息移动所述自主平台。
25.根据权利要求24所述的方法,其中,所述步骤(e)包括:
生成与所述缆线操作长度信息相对应的张力预测信息;
使用所述缆线操作长度信息和所述张力预测信息生成旋转角预测信息;以及
将所述旋转角预测信息与所述旋转角测量信息相比较以生成所述旋转角控制信息。
26.根据权利要求24所述的方法,其中所述步骤(d)包括使用当前位置信息和所移动的位置信息通过逆运动学生成所述缆线操作长度信息。
27.根据权利要求23所述的方法,其中,所述步骤(b)包括:
使用经连接至所述缆线的编码器测量的所述旋转角测量信息生成所述缆线的基本长度信息;
使用经连接至所述缆线的压力传感器测量的张力测量信息生成缆线张力信息;以及
使用所述缆线的基本长度信息以及所述缆线张力信息设置所述缆线的长度以生成所述缆线的当前长度信息。
28.根据权利要求23所述的方法,其中所述步骤(c)包括使用所述缆线的当前长度信息通过正运动学生成当前位置信息。
29.根据权利要求28所述的方法,其中,所述步骤(c)包括:
设置在区块中所述自主平台所处位置的任意位置信息;
使用所述任意位置信息设置所述缆线的任意长度信息;
通过将所述缆线的任意长度信息与所述缆线的当前长度信息相比较生成长度差值;以及
当所述长度差值小于长度基准信息时使用长度差值和任意位置信息生成当前位置信息。
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020100117504A KR101194747B1 (ko) | 2010-11-24 | 2010-11-24 | 와이어를 이용한 자율이동장치 제어 시스템 및 방법 |
| KR10-2010-0117504 | 2010-11-24 | ||
| KR10-2010-0118173 | 2010-11-25 | ||
| KR1020100118173A KR101194749B1 (ko) | 2010-11-25 | 2010-11-25 | 와이어를 이용한 자율이동장치 제어 시스템 및 방법 |
| PCT/KR2011/008983 WO2012070867A2 (ko) | 2010-11-24 | 2011-11-23 | 와이어를 이용한 자율이동장치 제어 시스템 및 방법 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN103260832A true CN103260832A (zh) | 2013-08-21 |
Family
ID=46146304
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201180056631XA Pending CN103260832A (zh) | 2010-11-24 | 2011-11-23 | 用于控制使用缆线的自主平台的系统和方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20130253751A1 (zh) |
| JP (1) | JP2014504397A (zh) |
| CN (1) | CN103260832A (zh) |
| DE (1) | DE112011103897T5 (zh) |
| WO (1) | WO2012070867A2 (zh) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113548542A (zh) * | 2021-07-12 | 2021-10-26 | 三一海洋重工有限公司 | 一种起重设备的电缆收放缆控制方法、装置以及系统 |
| RU2791827C1 (ru) * | 2022-09-02 | 2023-03-13 | Автономная некоммерческая организация высшего образования "Университет Иннополис" | Тросовая система с пассивным динамическим гасителем колебаний |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6271288B2 (ja) * | 2014-02-20 | 2018-01-31 | Ntn株式会社 | リンク作動装置の制御装置および制御方法 |
| DE102014015335B4 (de) * | 2014-10-17 | 2016-08-04 | Theodor Trautmann GmbH Bauunternehmen und Beton- und Stahlbetonbaubetrieb | Generative Fertigungsvorrichtung und Fertigungsverfahren zm schichtweisen Aufbau von Bauwerken |
| EP3366430B1 (de) * | 2017-02-22 | 2019-08-07 | SICK STEGMANN GmbH | Fördervorrichtung zum befördern von objekten und/oder personen |
| WO2019049972A1 (ja) | 2017-09-08 | 2019-03-14 | Ntn株式会社 | パラレルリンク機構を用いた作業装置 |
| EP3727765B1 (en) * | 2017-12-22 | 2024-08-14 | Marchesini Group S.p.A. | A cable-driven robot |
| KR102019418B1 (ko) * | 2018-03-20 | 2019-09-06 | 전남대학교산학협력단 | 병렬 케이블로봇의 견실제어를 위한 스마트 윈치 시스템 |
| WO2019208871A1 (ko) * | 2018-04-25 | 2019-10-31 | 전남대학교산학협력단 | 물류이송 케이블 로봇 시스템 및 이를 이용한 물류 관리 방법 |
| JP7440201B2 (ja) * | 2019-04-09 | 2024-02-28 | マッスル株式会社 | 位置制御装置 |
| CN112077836B (zh) * | 2020-09-08 | 2024-01-23 | 北京北特圣迪科技发展有限公司 | 一种基于四柔索牵引并联执行器的高架吊杆误差校正方法 |
| US20230002051A1 (en) * | 2021-07-02 | 2023-01-05 | Star Harbor Fly, LLC | Suspended Payload for Parabolic Flight |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5585707A (en) * | 1994-02-28 | 1996-12-17 | Mcdonnell Douglas Corporation | Tendon suspended platform robot |
| JP2003305673A (ja) * | 2002-04-15 | 2003-10-28 | Mitsubishi Heavy Ind Ltd | 衛星移動ロボットシステム |
| KR20090124142A (ko) * | 2008-05-29 | 2009-12-03 | 삼성중공업 주식회사 | 선체 블록 내부 작업을 위한 이동장치 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5690798A (en) * | 1979-12-24 | 1981-07-23 | Mitsubishi Heavy Ind Ltd | Precise moving system of bench vessel |
| JP3089129B2 (ja) * | 1993-03-15 | 2000-09-18 | 三菱重工業株式会社 | 水上浮動体の自動転船装置 |
| JP2731129B2 (ja) * | 1995-05-02 | 1998-03-25 | 株式会社共和機械製作所 | 懸吊移動機 |
| US20100279255A1 (en) * | 2007-02-16 | 2010-11-04 | Ohio University | Vehicle simulator system |
| US7753642B2 (en) * | 2007-09-06 | 2010-07-13 | Ohio University | Apparatus and method associated with cable robot system |
| JP2009150056A (ja) * | 2007-12-18 | 2009-07-09 | Chugoku Electric Power Co Inc:The | ゴンドラ移動装置 |
| US9908750B2 (en) * | 2010-04-01 | 2018-03-06 | Par Systems, Inc. | Tensile truss mast |
-
2011
- 2011-11-23 DE DE112011103897T patent/DE112011103897T5/de not_active Withdrawn
- 2011-11-23 US US13/989,337 patent/US20130253751A1/en not_active Abandoned
- 2011-11-23 WO PCT/KR2011/008983 patent/WO2012070867A2/ko active Application Filing
- 2011-11-23 CN CN201180056631XA patent/CN103260832A/zh active Pending
- 2011-11-23 JP JP2013540892A patent/JP2014504397A/ja active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5585707A (en) * | 1994-02-28 | 1996-12-17 | Mcdonnell Douglas Corporation | Tendon suspended platform robot |
| JP2003305673A (ja) * | 2002-04-15 | 2003-10-28 | Mitsubishi Heavy Ind Ltd | 衛星移動ロボットシステム |
| KR20090124142A (ko) * | 2008-05-29 | 2009-12-03 | 삼성중공업 주식회사 | 선체 블록 내부 작업을 위한 이동장치 |
Non-Patent Citations (2)
| Title |
|---|
| KANE USHER等: "Air Vehicle Simulator: an Application for a Cable Array Robot", 《PROCEEDINGS OF THE 2005 IEEE INTERNATIONAL CONFERENCE ON ROBOTICS AND AUTOMATION》 * |
| REZA OFTADEH等: "Forward Kinematic Analysis of A Planar Cable Driven Redundant Parallel Manipulator Using Force Sensors", 《THE 2010 IEEE/RSJ INTERNATIONAL CONFERENCE ON INTELLIGENT ROBOTS AND SYSTEMS》 * |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113548542A (zh) * | 2021-07-12 | 2021-10-26 | 三一海洋重工有限公司 | 一种起重设备的电缆收放缆控制方法、装置以及系统 |
| RU2791827C1 (ru) * | 2022-09-02 | 2023-03-13 | Автономная некоммерческая организация высшего образования "Университет Иннополис" | Тросовая система с пассивным динамическим гасителем колебаний |
Also Published As
| Publication number | Publication date |
|---|---|
| DE112011103897T5 (de) | 2013-08-22 |
| JP2014504397A (ja) | 2014-02-20 |
| WO2012070867A2 (ko) | 2012-05-31 |
| US20130253751A1 (en) | 2013-09-26 |
| WO2012070867A3 (ko) | 2012-09-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN103260832A (zh) | 用于控制使用缆线的自主平台的系统和方法 | |
| CN103991078B (zh) | 机器人系统和用于控制该机器人系统的方法 | |
| US7197836B2 (en) | Reference coordinate calculating method, reference coordinate calculating program, recording medium thereof, reference plate and form measuring machine | |
| Borgstrom et al. | Design and implementation of NIMS3D, a 3-D cabled robot for actuated sensing applications | |
| US10260913B2 (en) | Sensor and method enabling the determination of the position and orientation of a flexible element | |
| Tho et al. | An Overview of Cable‐Driven Parallel Robots: Workspace, Tension Distribution, and Cable Sagging | |
| US20210003386A1 (en) | Photogrammetric cable robot | |
| CN109968402B (zh) | 回程间隙测量方法及控制方法、装置、系统和存储介质 | |
| Yang et al. | Learning to propagate interaction effects for modeling deformable linear objects dynamics | |
| JP6441154B2 (ja) | トータルステーションを用いた測定方法およびトータルステーションの制御装置 | |
| CN107813342A (zh) | 一种绳牵引并联机器人三位一体结构稳定性评价方法 | |
| CN109458988A (zh) | 基于uwb无线测距技术的抱杆倾角测量方法 | |
| JP6564272B2 (ja) | Hilシミュレーションシステム及びhilシミュレーション方法 | |
| JP2011513135A (ja) | 船体ブロックの搭載精度予測システム、方法及びその記録媒体 | |
| CN110815207B (zh) | 一种Stewart型并联柔索机器人运动学标定方法 | |
| JP5316396B2 (ja) | ロボットのばね定数同定方法およびロボットのばね定数同定装置 | |
| CN105425582A (zh) | 一种基于卡尔曼滤波的Stewart机构在线标定方法 | |
| Caverly et al. | Online Self-Calibration of Cable-Driven Parallel Robots Using Covariance-Based Data Quality Assessment Metrics | |
| Merlet | Direct kinematics of CDPR with extra cable orientation sensors: The 2 and 3 cables case with perfect measurement and sagging cables | |
| CN109521802A (zh) | 用于运动轨迹跟踪的方法、装置和设备 | |
| KR101194744B1 (ko) | 자율이동장치에 연결된 와이어 위치 판단 시스템 및 방법 | |
| KR101358307B1 (ko) | 이동체 제어장치 및 방법 | |
| CN102135431B (zh) | 一种惯性测量单元精度补偿的方法 | |
| JP2011125955A (ja) | ロボットのばね定数同定方法およびロボットのばね定数同定装置 | |
| Nakamura et al. | Developing a support system for loading planning |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C02 | Deemed withdrawal of patent application after publication (patent law 2001) | ||
| WD01 | Invention patent application deemed withdrawn after publication |
Application publication date: 20130821 |