CN102787813A - 全液压智能型动力猫道 - Google Patents
全液压智能型动力猫道 Download PDFInfo
- Publication number
- CN102787813A CN102787813A CN2012102954937A CN201210295493A CN102787813A CN 102787813 A CN102787813 A CN 102787813A CN 2012102954937 A CN2012102954937 A CN 2012102954937A CN 201210295493 A CN201210295493 A CN 201210295493A CN 102787813 A CN102787813 A CN 102787813A
- Authority
- CN
- China
- Prior art keywords
- twisting machine
- hydraulic
- pedestal
- waterpower
- support arm
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images






Abstract
本发明公开了一种全液压智能型动力猫,是由支撑臂、举升支腿、滑车、钻杆定位机构、活动支腿、拧管机、拧管机滑轨、控制箱、坡道、支腿、翻转板、基座、水力出心装置和液压站组成,坡道和基座采用螺栓连接,基座旁安装拧管机和拧管机滑轨,在拧管机上安装水力出心装置 ,基座上具有钻杆定位机构和翻转板,滑车设置在支撑臂,基座的二侧设置多条活动支腿,液压站向系统提供动力,控制箱控制系统的动作;本发明可以将接单根、甩杆、接卸孔底动力和水力取岩心几个工序集成为一体,不需要取下钻杆,就可以自动完成拧卸和水力出心,满足了深井取心钻进工艺要求,大大地减少场地工的数量,减轻工人劳动强度,提高了钻机系统的工作效率;由于采用全液压控制,可以实现无级变速,简化了传动机构,提高了设备的适应性及可靠性。
Description
技术领域
本发明涉及石油钻探和深部钻井的装置,特别涉及一种钻机配套使用的全液压智能型动力猫道。
背景技术
目前国内外石油钻探的设备的自动化程度相对薄弱,与目前钻机的发展水平不能相适应。并且猫道在众多设备当中起到了举足轻重的作用,猫道系统运行的稳定性、机械化和智能化直接决定了钻井的效率和安全性。
国内外的猫道在从地面向二层台接单根时,都是用钢丝绳绞车系统将立根拉至二层台,此方式的运行时间比较长,效率低,同时工人的劳动强度大,安全性低。
目前国内外的猫道只能完成送单根、甩杆的功能,无法实现孔底动力的接卸和取心功能,不能使得整个过程系统化、智能化,并且取得的岩心不完整,降低了工作的效率,工作周期较长,智能化程度较低。
发明内容
本发明的目的在于提供一种集成化的、全液压智能型动力猫道,本发明可以将接单根,甩杆,接卸孔底动力,水力取岩心几个工序集成为一体,不需要取下钻杆,就可以自动完成拧卸和水力出心,满足了深井取心钻进工艺要求,大大地减少场地工的数量,减轻工人劳动强度,提高了钻机系统的工作效率。由于采用全液压控制,可以实现无级变速,简化了传动机构,提高了设备的适应性及可靠性。
本发明是由支撑臂、举升支腿、滑车、钻杆定位机构、活动支腿、拧管机、拧管机滑轨、控制箱、坡道、支腿、翻转板、基座、水力出心装置和液压站组成,坡道和基座采用螺栓连接,可进行拆卸,便于运移;基座旁安装拧管机和拧管机滑轨,拧管机可实现接卸孔底动力;在拧管机上安装水力出心装置 ,水力出心装置 可以在甩杆之后,直接在猫道旁进行水力取岩心;基座上具有钻杆定位机构和翻转板,钻杆定位机构采用自动控制方式对钻杆进行定位;滑车设置在支撑臂,滑车采用开合式,以保证拧管机的工作需要;基座的二侧设置多条活动支腿,便于潜孔锤的运移,液压站向系统提供动力,控制箱控制系统的动作。
所述举升支腿和支撑臂通过螺栓连接,支撑臂前端设置有导向滑轮,传动链将支撑链轮、第一压紧轮和第二压紧轮连接在一起,传动链固定不动,支撑链轮上的马达提供动力,使得支撑臂通过导向滑轮在坡道上下滑动。
所述钻杆定位机构的液压缸筒通过铰座铰接在基座上,通过一组液压缸的活塞杆的伸缩完成钻杆位置的确定,活塞杆一端通过销钉连接曲柄,曲柄通过铰座铰接在基座上,通过自动控制可以满足对不同尺寸钻杆的定位需求。
所述拧管机上直接配有水力出心装置,水力出心装置利用泥浆泵通过岩心和岩屑回流软管、快速接头与岩心管连接,采用水力反循环连续取心方法,直接取得岩心。
拧管机上的第一夹紧油缸和第二夹紧油缸通过螺栓连接在拧管机底座上,拧卸液压缸通过法兰连接至第一夹紧油缸和第二夹紧油缸下;水力出心装置由泥浆泵与岩心和岩屑回流软管通过快速接头连接至岩心管,采用水力反循环连续取心方法,直接取得岩心。
本发明的有益效果:
1、本发明支撑臂的举升采用的是链传动,支撑臂前端设置有支撑链轮与两组压紧轮通过轮架铰接在一起,传动链固定不动,由其上的马达提供动力,使得支撑臂通过支撑臂前的导向滑轮在坡道上下滑动。可以获得较为准确的平均传动比,结构紧凑,较之以前的钢丝绳绞车系统更加平稳,高效,安全,减少了工作时间,降低了工人的劳动强度。
2、钻杆定位机构直接利用液压缸和连杆的配合,不仅结构简单,而且突破了原有的定位结构,可以满足不同直径大小的钻杆的定位需求。液压缸缸筒铰接在基座上,通过一组液压缸的活塞杆的伸缩即可以完成钻杆位置的确定,定位方式方便、准确。
3、在拧管机上直接配有地面水力出心接口,可以通过快速接头泥浆泵与岩心管连接,直接取得岩心。通过这种方式可以取得比较完整的岩心,提高整个系统的工作效率。
4、拧管机配置有两个夹紧油缸,一个拧卸液压缸,当甩杆之后,钻杆通过开合式的滑车被推送到拧管机操作台面上,夹紧油缸对钻杆夹紧后,拧卸液压缸活塞杆伸出和缩回时,可以完成孔底动力的接卸。
附图说明
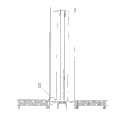
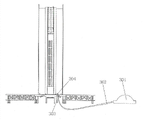
图1为本发明的整体结构示意图。
图2为本发明的支撑臂举升机构结构示意图;
图3为图2中的A处放大示意图。
图4为本发明的钻杆定位机构定位时的结构示意图;
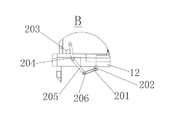
图5为图4中的B处放大示意图。
图6为本发明的钻杆定位机构解除定位时的结构示意图;
图7为图6中C处放大示意图。
图8为本发明的水力出心装置示意图。
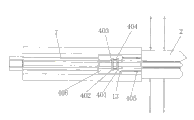
图9、图10为本发明的拧管机动作示意图。
具体实施方式
请参阅图1至图10所示,本发明是由支撑臂1、举升支腿2、滑车3、钻杆定位机构4、活动支腿5、拧管机6、拧管机滑轨7、控制箱8、坡道9、支腿10、翻转板11、基座12、水力出心装置13和液压站14组成,坡道9和基座12采用螺栓连接,可进行拆卸,便于运移;基座12旁安装拧管机6和拧管机滑轨7,拧管机6可实现接卸孔底动力;在拧管机6上安装水力出心装置 13,水力出心装置 13可以在甩杆之后,直接在猫道旁进行水力取岩心;基座12上具有钻杆定位机构4和翻转板11,钻杆定位机构4采用自动控制方式对钻杆进行定位;滑车3设置在支撑臂1,滑车2采用开合式,以保证拧管机6的工作需要;基座12的二侧设置多条活动支腿5,便于潜孔锤的运移。液压站14向系统提供动力,控制箱8控制系统的动作。
所述举升支腿2和支撑臂1通过螺栓连接,如图3所示,支撑臂1前端设置有导向滑轮101,传动链15将支撑链轮102、第一压紧轮103和第二压紧轮104连接在一起,传动链15固定不动,支撑链轮102上的马达105提供动力,使得支撑臂1通过导向滑轮101在坡道9上下滑动。
所述钻杆定位机构4的液压缸筒201通过铰座202铰接在基座12上,如图4、图5、图6和图7所示,通过一组液压缸的活塞杆206的伸缩完成钻杆203位置的确定,活塞杆206一端通过销钉连接曲柄205,曲柄205通过铰座204铰接在基座12上,通过自动控制可以满足对不同尺寸钻杆的定位需求。
如图8所示,所述拧管机6上直接配有水力出心装置13,水力出心装置13利用泥浆泵301通过岩心和岩屑回流软管302、快速接头304与岩心管303连接,采用水力反循环连续取心方法,直接取得岩心。
如图9和图10所示,拧管机6上的第一夹紧油缸401和第二夹紧油缸402通过螺栓连接在拧管机底座406上,拧卸液压缸403通过法兰连接至第一夹紧油缸401和第二夹紧油缸402下;水力出心装置13由泥浆泵301与岩心和岩屑回流软管302通过快速接头304连接至岩心管303,采用水力反循环连续取心方法,直接取得岩心。
本发明的工作过程:配合图1至图10所示,
整个系统由液压站14提供动力,控制箱8进行顺序控制。当该全液压智能型动力猫道安放在二层台下面时,钻杆摆放架连接在支腿10旁,钻杆203安放在支腿10上。
液压站14提供动力,支腿一端的液压缸活塞杆伸出,将钻杆203送至钻杆定位机构4中,待支撑臂1和举升支腿2回落至猫道基座12时,液压缸的活塞杆206的伸出,将曲柄205旋转至基座12平面以下,翻转板11由马达带动,翻转,将钻杆203送至支撑臂1的V型槽内。
启动液压马达105,带动支撑链轮102在传动链15上滚动,由支撑臂1前端的导向滑轮101在坡道9上滑动,将支撑臂1举升至二层台,滑车3将钻杆203送给顶驱装置。
当钻井结束后,甩杆时,液压马达105反转,将支撑臂1送回地面,利用开合式的滑车3将钻杆203推送至拧管机6上,第一夹紧油缸401固定在拧管机底座406上,第二夹紧油缸402可在滑轨上通过液压缸活塞杆404的伸缩进行移动。需要拧管时,拧卸液压缸403对钻杆进行拧卸。拧卸一部分后,拧管机滑轨7上的液压缸活塞杆405移动,进行下一部分的拧卸,直至全部拧卸完毕。泥浆泵301利用循环介质,通过岩心和岩屑回流软管302送至岩心管303,将岩心经钻杆的中心通道连续不断的输送到地表。
Claims (5)
1.一种全液压智能型动力猫道,其特征在于:是由支撑臂(1)、举升支腿(2)、滑车(3)、钻杆定位机构(4)、活动支腿(5)、拧管机(6)、拧管机滑轨(7)、控制箱(8)、坡道(9)、支腿(10)、翻转板(11)、基座(12)、水力出心装置(13)和液压站(14)组成,坡道(9)和基座(12)采用螺栓连接;基座(12)旁安装拧管机(6)和拧管机滑轨(7),在拧管机(6)上安装水力出心装置(13),基座(12)上具有钻杆定位机构(4)和翻转板(11),滑车(3)设置在支撑臂(1)上,滑车(2)为开合式,基座(12)的二侧设置多条活动支腿(5),液压站(14)向系统提供动力,控制箱(8)控制系统的动作。
2.根据权利要求1所述的一种全液压智能型动力猫道,其特征在于:所述举升支腿(2)和支撑臂(1)通过螺栓连接支撑臂(1)前端设置有导向滑轮(101),传动链(15)将支撑链轮(102)、第一压紧轮(103)和第二压紧轮(104)连接在一起,传动链(15)固定不动,支撑链轮(102)上的马达(105)提供动力,使得支撑臂(1)通过导向滑轮(101)在坡道(9)上下滑动。
3.根据权利要求1所述的一种全液压智能型动力猫道,其特征在于:所述钻杆定位机构(4)的液压缸筒(201)通过铰座(202)铰接在基座(12)上,通过一组液压缸的活塞杆(206)的伸缩完成钻杆(203)位置的确定,活塞杆(206)一端通过销钉连接曲柄(205),曲柄(205)通过铰座(204)铰接在基座(12)上。
4.根据权利要求1所述的一种全液压智能型动力猫道,其特征在于:所述的水力出心装置(13)由泥浆泵(301)与岩心和岩屑回流软管(302)通过快速接头(304)连接至岩心管(303)。
5.根据权利要求1所述的一种全液压智能型动力猫道,其特征在于:所述的拧管机(6)上的第一夹紧油缸(401)和第二夹紧油缸(402)通过螺栓连接在拧管机底座(406)上,拧卸液压缸(403)通过法兰连接至第一夹紧油缸(401)和第二夹紧油缸(402)下。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201210295493.7A CN102787813B (zh) | 2012-08-18 | 2012-08-18 | 全液压智能型动力猫道 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201210295493.7A CN102787813B (zh) | 2012-08-18 | 2012-08-18 | 全液压智能型动力猫道 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN102787813A true CN102787813A (zh) | 2012-11-21 |
| CN102787813B CN102787813B (zh) | 2015-06-17 |
Family
ID=47153374
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201210295493.7A Expired - Fee Related CN102787813B (zh) | 2012-08-18 | 2012-08-18 | 全液压智能型动力猫道 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN102787813B (zh) |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103643905A (zh) * | 2013-12-11 | 2014-03-19 | 东营胜利慧岩石油装备有限公司 | 一种用于管杆上下猫道的移运装置 |
| CN104060951A (zh) * | 2014-05-28 | 2014-09-24 | 中国石油集团渤海石油装备制造有限公司 | 一种海洋钻井平台智能钻具移运排放系统及其使用方法 |
| CN105201427A (zh) * | 2015-11-03 | 2015-12-30 | 四川宏华石油设备有限公司 | 一种动力猫道 |
| CN106869827A (zh) * | 2017-04-21 | 2017-06-20 | 中曼石油天然气集团股份有限公司 | 一种自行走式动力猫道及其行走方法 |
| CN108412440A (zh) * | 2018-05-16 | 2018-08-17 | 吉林大学 | 一种旋转滑道式动力猫道 |
| WO2020051705A1 (en) | 2018-09-11 | 2020-03-19 | Drillform Technical Services Ltd. | Pipe handler apparatus |
| CN110984885A (zh) * | 2019-12-17 | 2020-04-10 | 宝鸡石油机械有限责任公司 | 便于快速移运的高集成度模块化动力猫道底座及使用方法 |
| CN111255389A (zh) * | 2020-02-27 | 2020-06-09 | 西安石油大学 | 电驱自动猫道系统及控制方法 |
| CN111852359A (zh) * | 2020-02-26 | 2020-10-30 | 四川宏华石油设备有限公司 | 一种用于动力猫道的进出料机构及其动力猫道 |
| CN112211575A (zh) * | 2020-09-04 | 2021-01-12 | 四川宏华石油设备有限公司 | 管具测量装置 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4386883A (en) * | 1980-09-30 | 1983-06-07 | Rig-A-Matic, Inc. | Materials lifting apparatus |
| CN201013271Y (zh) * | 2007-03-26 | 2008-01-30 | 南阳二机石油装备(集团)有限公司 | 全液压钻杆排放装置 |
| CN201155304Y (zh) * | 2008-02-19 | 2008-11-26 | 四川宏华友信石油机械有限公司 | 石油钻井的钻具输送装置 |
| US8052368B2 (en) * | 2008-09-17 | 2011-11-08 | 762-725 Alberta Ltd. | Catwalk for a drilling rig |
| US8215887B2 (en) * | 2005-06-01 | 2012-07-10 | Canrig Drilling Technology Ltd. | Pipe-handling apparatus and methods |
| CN202767911U (zh) * | 2012-08-18 | 2013-03-06 | 吉林大学 | 全液压智能型动力猫道 |
-
2012
- 2012-08-18 CN CN201210295493.7A patent/CN102787813B/zh not_active Expired - Fee Related
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4386883A (en) * | 1980-09-30 | 1983-06-07 | Rig-A-Matic, Inc. | Materials lifting apparatus |
| US8215887B2 (en) * | 2005-06-01 | 2012-07-10 | Canrig Drilling Technology Ltd. | Pipe-handling apparatus and methods |
| CN201013271Y (zh) * | 2007-03-26 | 2008-01-30 | 南阳二机石油装备(集团)有限公司 | 全液压钻杆排放装置 |
| CN201155304Y (zh) * | 2008-02-19 | 2008-11-26 | 四川宏华友信石油机械有限公司 | 石油钻井的钻具输送装置 |
| US8052368B2 (en) * | 2008-09-17 | 2011-11-08 | 762-725 Alberta Ltd. | Catwalk for a drilling rig |
| CN202767911U (zh) * | 2012-08-18 | 2013-03-06 | 吉林大学 | 全液压智能型动力猫道 |
Cited By (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103643905A (zh) * | 2013-12-11 | 2014-03-19 | 东营胜利慧岩石油装备有限公司 | 一种用于管杆上下猫道的移运装置 |
| CN103643905B (zh) * | 2013-12-11 | 2015-04-22 | 东营胜利慧岩石油装备有限公司 | 一种用于管杆上下猫道的移运装置 |
| CN104060951A (zh) * | 2014-05-28 | 2014-09-24 | 中国石油集团渤海石油装备制造有限公司 | 一种海洋钻井平台智能钻具移运排放系统及其使用方法 |
| CN105201427A (zh) * | 2015-11-03 | 2015-12-30 | 四川宏华石油设备有限公司 | 一种动力猫道 |
| CN106869827A (zh) * | 2017-04-21 | 2017-06-20 | 中曼石油天然气集团股份有限公司 | 一种自行走式动力猫道及其行走方法 |
| CN106869827B (zh) * | 2017-04-21 | 2023-08-01 | 中曼石油钻井技术有限公司 | 一种自行走式动力猫道及其行走方法 |
| CN108412440A (zh) * | 2018-05-16 | 2018-08-17 | 吉林大学 | 一种旋转滑道式动力猫道 |
| CN108412440B (zh) * | 2018-05-16 | 2023-09-26 | 吉林大学 | 一种旋转滑道式动力猫道 |
| WO2020051705A1 (en) | 2018-09-11 | 2020-03-19 | Drillform Technical Services Ltd. | Pipe handler apparatus |
| EP3850184A1 (en) * | 2018-09-11 | 2021-07-21 | Drillform Technical Services Ltd. | Pipe handler apparatus |
| US11549320B2 (en) | 2018-09-11 | 2023-01-10 | Drillform Technical Services Ltd. | Pipe handler apparatus |
| CN110984885A (zh) * | 2019-12-17 | 2020-04-10 | 宝鸡石油机械有限责任公司 | 便于快速移运的高集成度模块化动力猫道底座及使用方法 |
| CN111852359A (zh) * | 2020-02-26 | 2020-10-30 | 四川宏华石油设备有限公司 | 一种用于动力猫道的进出料机构及其动力猫道 |
| CN111255389A (zh) * | 2020-02-27 | 2020-06-09 | 西安石油大学 | 电驱自动猫道系统及控制方法 |
| CN111255389B (zh) * | 2020-02-27 | 2022-03-25 | 西安石油大学 | 电驱自动猫道系统及控制方法 |
| CN112211575A (zh) * | 2020-09-04 | 2021-01-12 | 四川宏华石油设备有限公司 | 管具测量装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN102787813B (zh) | 2015-06-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN102787813B (zh) | 全液压智能型动力猫道 | |
| CN202767911U (zh) | 全液压智能型动力猫道 | |
| CN202321556U (zh) | 一种钻机整体平移装置 | |
| CN201310309Y (zh) | 一种动力猫道 | |
| CN201310342Y (zh) | 一种连续管测井机 | |
| CN205949909U (zh) | 球台托架专用钻机 | |
| CN104153724A (zh) | 修井作业管柱移运装置 | |
| CN207609374U (zh) | 升降自行走式全套管全回转钻机 | |
| CN204419077U (zh) | 一种石油斜井钻机自动换杆装置 | |
| CN103821454B (zh) | 全断面施工瓦斯抽放钻车 | |
| CN204298743U (zh) | 钢丝绳牵引和提升全液压缆载吊机 | |
| CN208934591U (zh) | 一体式全套管全回转钻机 | |
| CN206468895U (zh) | 一种顶管装置 | |
| CN206873531U (zh) | 导杆式回转切削成槽机 | |
| CN101949279A (zh) | 配重平衡立式液压抽油机 | |
| CN111645202B (zh) | 铁路挡墙加固用钻机移动式自动提升台架 | |
| CN202174655U (zh) | 一种劈裂机 | |
| CN205999960U (zh) | 一种坑洞钻挖机 | |
| CN211038540U (zh) | 一种用于钻探设备的升降机构 | |
| CN208870531U (zh) | 一种车载式折叠打井机 | |
| CN207499804U (zh) | 一种长螺杆钻机 | |
| CN103485736B (zh) | 一种海底钻机取样管机械手装置 | |
| CN207776788U (zh) | 超低空全套管全回转钻机 | |
| CN206815422U (zh) | 导杆式液压动力切削成槽机 | |
| CN202401964U (zh) | 一种长螺旋深孔钻机 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20150617 Termination date: 20200818 |