CN102670112B - 一种自动同步辅助站立装置 - Google Patents
一种自动同步辅助站立装置 Download PDFInfo
- Publication number
- CN102670112B CN102670112B CN 201210003982 CN201210003982A CN102670112B CN 102670112 B CN102670112 B CN 102670112B CN 201210003982 CN201210003982 CN 201210003982 CN 201210003982 A CN201210003982 A CN 201210003982A CN 102670112 B CN102670112 B CN 102670112B
- Authority
- CN
- China
- Prior art keywords
- backrest
- pedal
- human body
- drive
- deflecting roller
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images





Landscapes
- Rehabilitation Tools (AREA)
Abstract
本发明公开了一种自动同步辅助站立装置,包括底座及固定设置于底座上方的顶架、靠背、踏板,靠背上设有供人手扶和/或支撑人体腋窝的扶手,靠背的下端铰接有供人坐的椅座,椅座的前部铰接有沿竖直向下延伸的椅腿,椅腿的下端与踏板固定;装置还包括驱动所述靠背沿上下方向移动的靠背驱动机构或驱动所述踏板在水平方向上靠近靠背移动或远离靠背移动的踏板驱动机构;底座和顶架上安装有同步传动机构。本发明的靠背和踏板分别支撑人体的上肢和下肢,并通过同步传动机构带动踏板实现的下肢的水平移动与靠背带动的人体上肢的上肢升降动作的同步,从而符合人体自然习惯的动作辅助人体完成站立或坐下的动作。
Description
技术领域
本发明涉及医疗器械、日常用具或护理设备领域的辅助人体完成站立、坐下动作的辅助站立装置。
背景技术
目前正在研发的自动洗浴机器人是为了解决高龄老年人和下肢功能障碍者洗澡难的问题而开展的项目,然而高龄老年人和残疾人在洗浴过程中并不能像正常人一样轻松站立或坐下,而且由于年龄的增长或者是意外伤害,他们的下肢各关节可能不足以去支撑他们的身体自重。为此需要开发一种特殊的辅助站立装置,但国内外的现有技术中,其辅助站立装置大多采用翘起的翻板将人体从臀部以上部分向前推动而立起的方式,缺少对腿部与腿部以上部分进行衔接配合的措施,因此并不符合人体站立的自然习惯,无法解决人体上肢与下肢的同步协调动作。
发明内容
本发明的目的在于提供一种符合人体坐立动作习惯的帮助人体完成坐立动作的自动同步辅助站立装置。
本发明的技术方案是:一种自动同步辅助站立装置,包括底座及固定设置于底座上方的顶架、通过沿上下方向导向的靠背导向机构导向装配于底座与顶架之间的用于搀扶人体上肢升降的靠背、通过沿水平方向导向的踏板导向机构导向装配于机架上的用于挪动人体下肢的踏板,靠背上设有供人手扶和/或支撑人体腋窝的扶手,靠背的下端铰接有供人坐的椅座,椅座的后端与靠背铰接,椅座的前部铰接有沿竖直向下延伸的椅腿,椅腿的下端与踏板固定;装置还包括驱动所述靠背沿上下方向移动的靠背驱动机构或驱动所述踏板在水平方向上靠近靠背移动或远离靠背移动的踏板驱动机构;底座和顶架上安装有同步传动机构,同步传动机构包括呈L形分布的传动轮及绕装在传动轮上的传动体,传动轮为滑轮、皮带轮或链轮,传动体为与传动轮对应的钢丝绳、皮带或链条,所述传动轮包括装配于底座上的前下轮、第一转向轮、第二转向轮及装配于顶架上的后上轮,第一、二转向轮处于靠背的正下方,所述传动体自前下轮向后绕过第一转向轮后向上绕经后上轮再向下绕经第二转向轮后向前绕回前转向轮而闭合为环形,传动体包括绕于前下轮与第一转向轮之间的两段横向段和绕于第二转向轮与后上轮之间的两段纵向段,所述踏板与钢丝绳的其中一段横向段固定连接,靠背与钢丝绳的其中一段纵向段固定连接,踏板所连的钢丝绳的横向段与靠背所连的钢丝绳的纵向段衔接于同一个转向轮处。
所述靠背导向机构为固定于底座上的两根并列设置的立柱,靠背上固定有滑动套装于立柱上的导套,靠背驱动机构是由电机带动的丝杠螺母机构,电机采用伺服电机,包括竖向延伸的竖丝杠和通过螺纹旋装在竖丝杠上的与靠背固连的螺母;所述踏板导向机构为踏板的底部安装的沿先后方向滚动行走于底座上的行走轮。
所述扶手包括使用时支撑于人体腋窝的横撑和连接于横撑前部的供人手抓紧的手柄,手柄设于横撑的斜下方,横撑与手柄之间过渡连接有高于横撑的用于防止人体向前倾倒的限位凸部。
本发明的靠背和踏板分别支撑人体的上肢和下肢,并通过同步传动机构带动踏板实现的下肢的水平移动与靠背带动的人体上肢的上肢升降动作的同步,从而符合人体自然习惯的动作辅助人体完成站立或坐下的动作。
附图说明
图1是本发明的自动同步辅助站立装置实施例的结构示意图;
图2是图1坐下状态的结构示意图(未显示扶手);
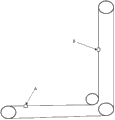
图3是图1中的同步传动机构的示意图;
图4a~图4c是本发明中椅腿在向后移动过程中的姿态示意图;
图5是本发明中的扶手的另一种结构的示意图。
具体实施方式
如图1~图4所示,本发明的辅助站立装置的实施例,包括底座6及固定设置于底座6上方的顶架10、通过沿上下方向导向的靠背导向机构导向装配于底座6与顶架10之间的用于搀扶人体上肢升降的靠背1,在本实施例中,靠背导向机构为固定于底座6上的两根并列设置的立柱11,靠背1上固定有滑动套装于立柱11上的导套,靠背驱动机构是由电机带动的丝杠螺母机构,电机采用伺服电机,包括竖向延伸的竖丝杠2和通过螺纹旋装在竖丝杠2上的与靠背1固连的螺母。靠背1上间隔并列设有两个扶手12,两扶手12之间的间隔处留有容纳人体躯干的空间。在本实施例中,扶手12为两根可供人手扶或支撑于腋窝的支撑杆。
靠背1的下端铰接有供人坐的椅座3,椅座3的后端与靠背1铰接,椅座3的前部铰接有沿竖直向下延伸的椅腿8,椅腿8的下端固定有向前延伸的放置人脚的踏板7,踏板7的底部安装有在沿先后方向滚动行走于底座6上的行走轮9。如图3所示,底座6和顶架10上安装有呈L形分布的传动轮及绕装在传动轮上的钢丝绳构成的同步传动机构,如图3中的各传动轮布置位置所示,传动轮包括装配于底座6上的前下轮、第一转向轮、第二转向轮及装配于顶架10上的后上轮,第一、二转向轮处于靠背的正下方,前下轮处于两转向轮的前方,后上轮处于两转向轮的正上方。钢丝绳自前下轮向后绕过第一转向轮后向上绕经后上轮再向下绕经第二转向轮后向前绕回前转向轮而闭合为环形,钢丝绳4包括绕于前下轮与第一转向轮之间的两段横向段和绕于第二转向轮与后上轮之间的两段纵向段,所述踏板7与钢丝绳的其中一段横向段固定连接(图3中A处),靠背1与钢丝绳的其中一段纵向段固定连接(图3中B处),踏板7所连的钢丝绳的横向段与靠背1所连的钢丝绳的纵向段衔接于同一个转向轮处。靠背1、椅座3、椅腿8和踏板7共同组成了一个竖直为支撑体、放下为座椅的可变形的座椅。
上述实施例在用于辅助人体站立时,辅助站立装置首先处于图1的位置,由伺服电机带动竖丝杠2正转,使靠背1向上移动,靠背1移动过程中又带动钢丝绳的纵向段向上移动,此时,传动轮转动,又带动钢丝绳的横向段水平向后移动,使得踏板7上的椅腿8在向后移动过程中基本保持竖直位置:椅腿8在向后移动过程中,钢丝绳为柔性传动体,椅腿可以首先向后偏移一个角度,然后回到竖直位置,这时因为椅腿8整体受到重力以及向上和向右的作用力,向上的作用力一部分被重力抵消,因此主要产生逆时针转动力矩而旋转。而踏板也会逆时针旋转一定角度,从而带动人脚及小腿先向人体背侧倾斜,这样的动作基本符合人体自然站立规律,即在站起前,脚和小腿会先向人体背侧倾斜移动将重心调正然后才会站起,本发明的此动作过程可对人体恢复训练起到很好的效果。如图4,随着靠背1的向上移动,使得本辅助站立装置最终到达如图3位置,
上述实施例在用于辅助人体站立时,伺服电机带动竖丝杠2反转,使靠背1向下移动,靠背1移动过程中又带动其连接的钢丝绳的纵向段向下移动,此时,传动轮,又带动连接踏板7的钢丝绳的横向段水平向前移动,使得踏板7上的椅腿8在向前移动过程中继续保持竖直位置,最后整个装置回到图1位置,动作完成。这样,本发明就成功的解决了自动洗浴机器人辅助站立装置的横向与纵向同步移动的协调问题。
在本发明的其他实施例中,也可以由踏板驱动机构驱动踏板3在水平方向上靠近靠背移动或远离靠背移动,进而通过同步传动机构带动靠背1升降,实现辅助人体站立或坐下的动作,这时就可以省去靠背驱动机构。
而在本发明的其他实施例中,扶手也可以采用如图5所示的结构,扶手包括使用时支撑于人体腋下的横撑211和连接于横撑211前部的供人手抓紧的手柄212,手柄212设于横撑211的斜下方,横撑211与手柄212之间过渡连接有高于横撑211的用于防止人体向前倾倒的限位凸部213。
另外,在本发明的其他实施例中,同步传动机构中的钢丝绳可以替换为其他的与转动的传动轮配合的传动体,如皮带,也可以采用常规技术中其他形式的带传动或链传动,带传动的同步机构可以采用摩擦型带传动或同步带型带传动。
上述实施例可具体的应用于洗澡机器人上,这时需要在装置的顶部上方设置洗头装置,在装置的侧面设置搓澡及喷淋装置。
当然在本发明的其他实施例中,靠背、踏板的导向机构也可以采用其他常规的直线移动导向副,如直线导轨与滑块、滑槽与滑轮、定向行走轮,两者的驱动机构也可以采用其他的常规的驱动机构,如带、链条、直线电机、齿轮齿条、气/液压缸等能够输出直线运动的机构,其中一些驱动机构也如丝螺母机构那样自带有一维以上的导向限位特殊功能,这时可以如上述实施例中的踏板行走轮的结构那样,减少导向机构的导向维度。
Claims (3)
1.一种自动同步辅助站立装置,其特征在于:包括底座及固定设置于底座上方的顶架、通过沿上下方向导向的靠背导向机构导向装配于底座与顶架之间的用于搀扶人体上肢升降的靠背、通过沿水平方向导向的踏板导向机构导向装配于机架上的用于挪动人体下肢的踏板,靠背上设有供人手扶和/或支撑人体腋窝的扶手,靠背的下端铰接有供人坐的椅座,椅座的后端与靠背铰接,椅座的前部铰接有沿竖直向下延伸的椅腿,椅腿的下端与踏板固定;装置还包括驱动所述靠背沿上下方向移动的靠背驱动机构或驱动所述踏板在水平方向上靠近靠背移动或远离靠背移动的踏板驱动机构;底座和顶架上安装有同步传动机构,同步传动机构包括呈L形分布的传动轮及绕装在传动轮上的传动体,传动轮为滑轮、皮带轮或链轮,传动体为与传动轮对应的钢丝绳、皮带或链条,所述传动轮包括装配于底座上的前下轮、第一转向轮、第二转向轮及装配于顶架上的后上轮,第一、二转向轮处于靠背的正下方,所述传动体自前下轮向后绕过第一转向轮后向上绕经后上轮再向下绕经第二转向轮后向前绕回前转向轮而闭合为环形,传动体包括绕于前下轮与第一转向轮之间的两段横向段和绕于第二转向轮与后上轮之间的两段纵向段,所述踏板与钢丝绳的其中一段横向段固定连接,靠背与钢丝绳的其中一段纵向段固定连接,踏板所连的钢丝绳的横向段与靠背所连的钢丝绳的纵向段衔接于同一个转向轮处。
2.根据权利要求1所述的自动同步辅助站立装置,其特征在于:所述靠背导向机构为固定于底座上的两根并列设置的立柱,靠背上固定有滑动套装于立柱上的导套,靠背驱动机构是由电机带动的丝杠螺母机构,电机采用伺服电机,包括竖向延伸的竖丝杠和通过螺纹旋装在竖丝杠上的与靠背固连的螺母;所述踏板导向机构为踏板的底部安装的沿先后方向滚动行走于底座上的行走轮。
3.根据权利要求1所述的自动同步辅助站立装置,其特征在于:所述扶手包括使用时支撑于人体腋窝的横撑和连接于横撑前部的供人手抓紧的手柄,手柄设于横撑的斜下方,横撑与手柄之间过渡连接有高于横撑的用于防止人体向前倾倒的限位凸部。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN 201210003982 CN102670112B (zh) | 2012-01-06 | 2012-01-06 | 一种自动同步辅助站立装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN 201210003982 CN102670112B (zh) | 2012-01-06 | 2012-01-06 | 一种自动同步辅助站立装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN102670112A CN102670112A (zh) | 2012-09-19 |
| CN102670112B true CN102670112B (zh) | 2013-11-06 |
Family
ID=46803173
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN 201210003982 Expired - Fee Related CN102670112B (zh) | 2012-01-06 | 2012-01-06 | 一种自动同步辅助站立装置 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN102670112B (zh) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109172178B (zh) * | 2018-07-20 | 2020-11-20 | 王珍茹 | 一种护理用辅助起身装置 |
| CN110840670A (zh) * | 2019-10-30 | 2020-02-28 | 同济大学 | 一种老年人辅助站立座椅 |
| CN110812021B (zh) * | 2019-11-15 | 2021-06-04 | 三峡大学 | 一种坐行两便的助步车及使用方法 |
| CN110859711B (zh) * | 2019-11-25 | 2021-06-22 | 郑州轻工业大学 | 助老辅助站立轮椅 |
| CN111419563B (zh) * | 2020-04-16 | 2022-03-25 | 湘潭大学 | 一种自动升降可搀扶式助老轮椅 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE4337584A1 (de) * | 1993-11-04 | 1995-05-11 | Franziska Waelder | Therapeutischer Schaukelstuhl |
| EP0780072A1 (en) * | 1995-12-18 | 1997-06-25 | Yang-Ting Liu | An adjustable headrest |
| CN1973806A (zh) * | 2006-12-07 | 2007-06-06 | 浙江大学 | 一种多体位外骨骼下肢康复训练机器人 |
| CN101933877A (zh) * | 2010-09-30 | 2011-01-05 | 常州市建本医疗康复器材有限公司 | 一种动态行走器 |
| CN202458096U (zh) * | 2012-01-06 | 2012-10-03 | 河南科技大学 | 自动同步辅助站立装置 |
-
2012
- 2012-01-06 CN CN 201210003982 patent/CN102670112B/zh not_active Expired - Fee Related
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE4337584A1 (de) * | 1993-11-04 | 1995-05-11 | Franziska Waelder | Therapeutischer Schaukelstuhl |
| EP0780072A1 (en) * | 1995-12-18 | 1997-06-25 | Yang-Ting Liu | An adjustable headrest |
| CN1973806A (zh) * | 2006-12-07 | 2007-06-06 | 浙江大学 | 一种多体位外骨骼下肢康复训练机器人 |
| CN101933877A (zh) * | 2010-09-30 | 2011-01-05 | 常州市建本医疗康复器材有限公司 | 一种动态行走器 |
| CN202458096U (zh) * | 2012-01-06 | 2012-10-03 | 河南科技大学 | 自动同步辅助站立装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN102670112A (zh) | 2012-09-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN102670106B (zh) | 一种自动辅助站立装置 | |
| CN102687996B (zh) | 一种可适应人体差异的自动辅助站立装置 | |
| CN102670112B (zh) | 一种自动同步辅助站立装置 | |
| CN102670125B (zh) | 一种多功能自动洗澡机 | |
| CN202408698U (zh) | 多功能自动洗澡机 | |
| CN110812130B (zh) | 一种骨盆辅助步行康复训练机器人 | |
| CN102499824B (zh) | 可升降助康复轮椅 | |
| KR101239059B1 (ko) | 재활용 보행 운동장치 | |
| CN103070763A (zh) | 一种辅助站立行走装置 | |
| CN110681111B (zh) | 一种具有减重功能的步态训练装置 | |
| CN106137575A (zh) | 一种站立式生活自理车 | |
| JP2011067227A (ja) | 歩行補助装置 | |
| CN110279537A (zh) | 多功能辅助上下床装置 | |
| CN104546327A (zh) | 一种折叠型平移式电动爬楼轮椅 | |
| CN108577285A (zh) | 一种方便起身的老人用座椅 | |
| CN203168567U (zh) | 一种双立柱多功能电动床 | |
| CN202437497U (zh) | 自动辅助站立装置 | |
| CN210330989U (zh) | 一种移位机 | |
| CN202458096U (zh) | 自动同步辅助站立装置 | |
| CN106137576A (zh) | 一种新型站立轮椅车 | |
| CN113018768A (zh) | 一种老年人康复家具 | |
| CN212308378U (zh) | 一种中风康复训练用辅助行走装置 | |
| CN213218336U (zh) | 多功能康复小车 | |
| CN202477493U (zh) | 可适应人体差异的自动辅助站立装置 | |
| CN106236511A (zh) | 减重步态训练机器人 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20131106 Termination date: 20150106 |
|
| EXPY | Termination of patent right or utility model |