CN102196174A - 摄像模块 - Google Patents
摄像模块 Download PDFInfo
- Publication number
- CN102196174A CN102196174A CN2011100512379A CN201110051237A CN102196174A CN 102196174 A CN102196174 A CN 102196174A CN 2011100512379 A CN2011100512379 A CN 2011100512379A CN 201110051237 A CN201110051237 A CN 201110051237A CN 102196174 A CN102196174 A CN 102196174A
- Authority
- CN
- China
- Prior art keywords
- drive member
- photographing module
- optical system
- hand
- system unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images







Classifications
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B17/00—Details of cameras or camera bodies; Accessories therefor
- G03B17/02—Bodies
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B5/00—Adjustment of optical system relative to image or object surface other than for focusing
- G03B5/02—Lateral adjustment of lens
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/57—Mechanical or electrical details of cameras or camera modules specially adapted for being embedded in other devices
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/68—Control of cameras or camera modules for stable pick-up of the scene, e.g. compensating for camera body vibrations
- H04N23/681—Motion detection
- H04N23/6812—Motion detection based on additional sensors, e.g. acceleration sensors
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/68—Control of cameras or camera modules for stable pick-up of the scene, e.g. compensating for camera body vibrations
- H04N23/682—Vibration or motion blur correction
- H04N23/685—Vibration or motion blur correction performed by mechanical compensation
- H04N23/687—Vibration or motion blur correction performed by mechanical compensation by shifting the lens or sensor position
Abstract
本发明提供摄像模块,使用使手抖校正对象要素在与摄像元件的摄像面平行且相互正交的2个方向移动的手抖校正机构来实现小型化。摄像模块具备:具有摄像元件的摄像元件单元;在摄像元件形成被摄体像的光学系统单元;以及手抖校正机构,该手抖校正机构具有使摄像元件和光学系统单元中的至少一方即手抖校正对象要素在与摄像元件的摄像面平行的第一方向(Y方向)移动的第一驱动构件(20)、以及使手抖校正对象要素在与摄像面平行且与第一方向(Y方向)交叉的第二方向(X方向)移动的第二驱动构件(30),摄像模块在与摄像面平行的平面中呈矩形状,第一驱动构件和第二驱动构件配置在光学系统单元的周围,且分别配置在摄像模块的相邻的2边侧。
Description
技术领域
本发明涉及具备手抖校正机构的摄像模块。
背景技术
以往,在便携式电话中搭载有照相机。该照相机几乎都是单焦点照相机。在DSC(Digital Still Camera:数字静态照相机)中,特别是在高倍率下需要进行手抖校正。另一方面,单焦点照相机不易受到手抖的影响。
但是,在便携式电话中,大多情况用一只手进行摄像,摄像时的手抖量远大于一般用两只手进行摄像的DSC的手抖量,进行手抖校正的必要性提高。
并且,特别是在DSC中,手抖校正机构的设置面积(占用的面积)大且厚度也比较大,但是,特别是在便携式电话和小型DSC中,谋求手抖校正机构的小型化、进而谋求摄像模块的小型化,提出有各种手抖校正机构(例如参照专利文献1~3)。
然而,在用于摄像装置的手抖校正机构中,存在这样的手抖校正机构:通过使摄像元件或者光学系统在与摄像面平行的X方向和Y方向移动来进行手抖校正。
例如,在专利文献1和2所记载的手抖校正机构中,用于使作为手抖校正对象要素的摄像元件移动的驱动构件配置在比光学系统靠下方的位置。
具体地说,专利文献1所记载的手抖校正机构的设置面积大,且上述驱动构件配置于摄像元件周围的宽广空间中。
并且,在专利文献2所记载的手抖校正机构中,上述驱动构件配置在比摄像元件更靠下方的位置,形成为厚度大的结构。
专利文献1:日本特开2006-113545号公报
专利文献2:日本特开2006-330678号公报
专利文献3:日本特开2006-295553号公报
当像上述的专利文献1所记载的手抖校正机构那样手抖校正机构的设置面积大、或者像上述的专利文献2所记载的手抖校正机构那样厚度大时,无法实现摄像模块整体的小型化。
发明内容
本发明的目的在于,在具备使手抖校正对象要素在与摄像元件的摄像面平行且相互交叉的2个方向移动的手抖校正机构的摄像模块中,实现摄像模块的小型化。
本发明的摄像模块具备:摄像元件单元,该摄像元件单元具有摄像元件;光学系统单元,该光学系统单元用于在上述摄像元件形成被摄体像;以及手抖校正机构,该手抖校正机构具有第一驱动构件和第二驱动构件,以上述摄像元件和上述光学系统单元中的至少一方作为手抖校正对象要素,上述第一驱动构件使上述手抖校正对象要素在与上述摄像元件的摄像面平行的第一方向移动,上述第二驱动构件使上述手抖校正对象要素在与上述摄像面平行且与上述第一方向交叉的第二方向移动,其中,上述摄像模块在与上述摄像面平行的平面中呈矩形状,上述第一驱动构件和上述第二驱动构件配置在上述光学系统单元的周围,且分别配置于上述摄像模块的相邻的2边侧。
根据本发明,在具备使手抖校正对象要素在与摄像元件的摄像面平行且相互交叉的2个方向移动的手抖校正机构的摄像模块中,能够实现摄像模块的小型化。
附图说明
图1是从左斜上方观察本发明的一个实施方式所涉及的摄像模块的立体图。
图2是从右斜下方观察本发明的一个实施方式所涉及的摄像模块的立体图。
图3是从左斜上方观察本发明的一个实施方式所涉及的摄像模块的手抖校正机构的立体图。
图4是示出本发明的一个实施方式所涉及的摄像模块的俯视图。
图5是沿着图4的V-V线的剖视图。
图6是沿着图4的VI-VI线的剖视图。
图7是从背面侧观察本发明的一个实施方式所涉及的摄像模块的Y方向驱动构件的立体图。
图8是示出本发明的一个实施方式所涉及的摄像模块的Y方向驱动构件的后视图。
图9是示出本发明的一个实施方式所涉及的摄像模块的Y方向驱动构件的右侧视图。
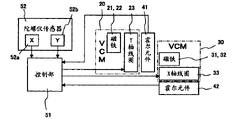
图10是用于说明本发明的一个实施方式所涉及的摄像模块的控制结构的框图。
图11是示出本发明的一个实施方式的第一变形例所涉及的摄像模块的剖视图。
图12A是示出本发明的一个实施方式的第二变形例所涉及的摄像模块的剖视图(其一)。
图12B是示出本发明的一个实施方式的第二变形例所涉及的摄像模块的剖视图(其二)。
图13是示出本发明的一个实施方式的第三变形例所涉及的摄像模块的剖视图。
标号说明
1:手抖校正机构;10:Y方向滑动件;20:X方向驱动构件;21、22:磁铁;21a:延伸部;23:线圈;24:磁轭;30:Y方向驱动构件;31、32:磁铁;31a:延伸部;33:线圈;34:磁轭;41、42:霍尔元件;51:控制部;52:陀螺仪传感器;52a:X方向检测部;52b:Y方向检测部;60:保持器;62:凹部;70:X方向滑动件;71:Y方向引导轴;72a、72b:引导支承部;73:贯通孔;80:基座部;81:X方向引导轴;82:引导支承部;82a、82b:贯通孔;91:上罩;92:下罩;100:摄像模块;110:摄像元件单元;111:摄像元件;111a:摄像面;112:基座基板;113:玻璃罩;114:玻璃罩保持器;115:柔性基板;120:光学系统单元;121:镜头。
具体实施方式
以下,参照附图对本发明的一个实施方式所涉及的摄像模块进行说明。
图1是从左斜上方观察本发明的一个实施方式所涉及的摄像模块100的立体图,图2是从右斜下方观察本发明的一个实施方式所涉及的摄像模块100的立体图。
图3是从左斜上方观察摄像模块100的手抖校正机构1的立体图。
图4是示出摄像模块100的俯视图。
图5是沿着图4的V-V线的剖视图,图6是沿着图4的VI-VI线的剖视图。
图7~图9是从背面侧观察摄像模块100的Y方向驱动构件30的立体图,以及示出Y方向驱动构件30的后视图和右侧视图。
图10是用于说明摄像模块100的控制结构的框图。
如图1和图2所示,摄像模块100具备:手抖校正机构1;摄像元件单元110,该摄像元件单元110具有作为手抖校正对象要素的摄像元件111;以及光学系统单元120,该光学系统单元120用于在摄像元件111形成被摄体像。摄像模块100例如配置于便携式电话或小型DSC等中。
如图3所示,手抖校正机构1具有:作为第一可动部的Y方向滑动件10;作为第一驱动构件的音圈电机(VCM:Voice Coil Motor)即X方向驱动构件20;作为第二驱动构件的音圈电机即Y方向驱动构件30;霍尔元件41、42;控制部51;作为手抖检测传感器的陀螺仪传感器(gyroscope)52;保持器60;作为第二可动部的X方向滑动件70;基座部80;以及作为手抖校正机构1和摄像模块100的壳体的上罩91和下罩92。
Y方向滑动件10呈上表面和底面开口的矩形框状。另外,在Y方向滑动件10内配置有后述的俯视呈正方形的光学系统单元120,因此Y方向滑动件10在俯视时呈大致正方形。
如图5和图6所示,在Y方向滑动件10的下部,摄像元件单元110例如通过粘接而固定在玻璃罩保持器114的上部。另外,固定摄像元件单元110的位置不限定于玻璃罩保持器114的上部,也可以是外周部等。这样,由于摄像元件111间接地配置于Y方向滑动件10,因此摄像元件111与Y方向滑动件10一体地移动。
Y方向滑动件10通过Y方向驱动构件30在Y方向(与摄像元件111的摄像面111a平行的“第一方向”)移动。具体地说,Y方向滑动件10在图5所示的贯通孔11中贯通有X方向滑动件70的Y方向引导轴71,Y方向滑动件10沿着该Y方向引导轴71在Y方向滑动。
并且,详细情况在后面描述,Y方向滑动件10通过X方向驱动构件20而与X方向滑动件70一起在X方向(与摄像元件111的摄像面111a平行且与上述第一方向交叉的“第二方向”)移动。这样,摄像元件111与Y方向滑动件10一体地在Y方向以及X方向移动。
如图3和图5所示,X方向驱动构件20具有磁铁21、22、线圈23以及磁轭24。并且,如图3以及图6~图9所示,Y方向驱动构件30与X方向驱动构件20同样具有磁铁31、32、线圈33以及磁轭34。
X方向驱动构件20和Y方向驱动构件30配置在光学系统单元120的周围。并且,X方向驱动构件20和Y方向驱动构件30分别配置于在与摄像面111a平行的平面中呈矩形状的摄像模块100的该平面的相邻的2边侧。
如图3和图5所示,X方向驱动构件20的磁铁21、22在Y方向较长,且在与摄像元件111的摄像面111a交叉的高度方向(光学系统单元120的光轴方向)与线圈23对置。进一步,磁铁21、22夹着线圈23在高度方向相互对置。
同样,如图4以及图6~图9所示,Y方向驱动构件30的磁铁31、32在X方向较长,且在与摄像元件111的摄像面111a交叉的高度方向与线圈33对置。进一步,磁铁31、32夹着线圈33在高度方向相互对置。
X方向驱动构件20的磁轭24的截面形成为包围磁铁21、22以及线圈23、且在光学系统单元120侧开口的四边形状。同样,Y方向驱动构件30的磁轭34的截面形成为包围磁铁31、32以及线圈33、且在光学系统单元120侧开口的四边形状。磁轭24、34例如通过对金属平板进行弯折加工而形成。
另外,磁轭24、34的截面形状不限于一边开口的四边形状,例如也可以形成为除了光学系统单元120侧之外在上表面侧或者底面侧也开口的L字状,或者形成为在光学系统单元120侧、上表面侧以及底面侧开口的I字状、即由位于光学系统单元120的相反侧的平板构成。
线圈23、33固定在Y方向滑动件10的外周面。对于X方向驱动构件20的磁铁21、22以及磁轭24,如图5所示,在磁轭24的底面固定于基座部80的上表面。另一方面,对于Y方向驱动构件30的磁铁31、32以及磁轭34,如图6所示,在磁轭34的底面固定于在保持器60的上表面形成的凹部62。另外,X方向驱动构件20和Y方向驱动构件30也可以固定于下罩92的内周面等。
X方向驱动构件20和Y方向驱动构件30的上侧的磁铁21、31比下侧的磁铁22、32长,且形成有从由磁轭24、34包围的部分延伸出来的延伸部21a、31a。另外,磁铁21、31并非必须形成为从磁轭24、34延伸出来,也可以形成为由磁轭24、34包围。
在延伸部21a、31a的下方,以与该延伸部21a、31a对置的方式配置有霍尔元件41、42。在后面叙述,霍尔元件41、42通过检测磁场的强度来检测摄像元件111的X方向和Y方向的移动量。另外,霍尔元件41、42固定于Y方向滑动件10的外周面。
如图5所示,摄像元件单元110的柔性基板115在光学系统单元120的周围、且在隔着光学系统单元120而与X方向驱动构件20对置的空间中迂回。柔性基板115例如与控制部51连接。
如图6所示,控制部51和陀螺仪传感器52配置在光学系统单元120的周围、且隔着光学系统单元120而与Y方向驱动构件30对置配置。另外,控制部51和陀螺仪传感器52例如配置于被夹持在上罩91和保持器60之间的同一基板上。基于控制部51的X方向驱动构件20、Y方向驱动构件30等的控制在后面叙述。
如图5和图6所示,光学系统单元120例如通过粘接而固定于保持器60的上表面。保持器60例如在底面固定于基座部80的上表面。另外,保持器60在俯视时呈大致矩形状,且在高度方向形成有贯通孔61。该贯通孔61与光学系统单元120的镜头(光学元件)121同样在俯视时形成为圆形状。该贯通孔61是供通过镜头121的光线通过的部分,并非必须是圆形,也可以形成为矩形、或者是像合成了圆形和矩形的形状那样的形状。
如图3所示,X方向滑动件70呈上表面和底面开口的矩形框状。在X方向滑动件70形成有引导支承部72a、72b,该引导支承部72a、72b支承上述的Y方向引导轴71。另外,Y方向引导轴71配置在摄像元件单元110的周围。
X方向滑动件70通过X方向驱动构件20的磁铁21、22以及线圈23而与Y方向滑动件10一起相对于基座部80在X方向移动。具体地说,如图6所示,在X方向滑动件70形成有贯通孔73,基座部80的X方向引导轴81贯通该贯通孔73。进而,X方向滑动件70在贯通孔71沿着X方向引导轴81在X方向滑动。
另外,通过将X方向滑动件70形成为矩形框状,即便在X方向滑动件70设置Y方向引导轴71、并设置供X方向引导轴81贯通的贯通孔73,也能够确保X方向滑动件70相对于Y方向移动以及X方向移动的强度。
基座部80具有上述的X方向引导轴81和引导支承部82,在该引导支承部82形成有贯通孔82a、82b,X方向引导轴81嵌合插入(fit and insert)于贯通孔82a、82b。另外,X方向引导轴81与Y方向引导轴71同样配置在摄像元件单元110的周围。
如图1~图3所示,下罩92呈上表面开口的大致长方体的箱状。如图5和图6所示,上罩91例如以与下罩92的内周面上端嵌合的方式配置。
如图5和图6所示,摄像元件单元110具有:摄像元件111;基座基板112,摄像元件111安装(mounted)于该基座基板112;作为光透射性罩的玻璃罩113;玻璃罩保持器114,该玻璃罩保持器114用于保持上述玻璃罩113;以及上述的柔性基板115。
光学系统单元120具有:镜头121,该镜头121用于在摄像元件111形成被摄体像;以及例如作为音圈电机的未图示的自动对焦致动器,该自动对焦致动器以利用弹性体夹持镜头121的方式保持镜头121。另外,光学系统单元120与摄像模块100同样俯视呈正方形状,且俯视的中心位置也与摄像模块100的中心位置相同。进而,镜头121的光轴也与摄像模块100的中心位置一致。
另外,摄像元件单元110和光学系统单元120在高度方向(与摄像面111a交叉的方向)上相互从相反侧固定于手抖校正机构1。具体地说,摄像元件单元110固定于Y方向滑动件10的底面,光学系统单元120固定于保持器60的上表面。另外,固定摄像元件单元110的位置不限定于Y方向滑动件10的底面。并且,固定光学系统单元120的位置不限定于保持器60的上表面。
如图10所示,上述的控制部51利用陀螺仪传感器52的X方向检测部52a和Y方向检测部52b检测未图示的摄像装置的抖动量(角速度)。
控制部51根据上述的检测到的抖动量计算摄像元件111的移动量,并使X方向驱动构件20和Y方向驱动构件30的线圈23、33中流过与该移动量对应的电流。由此,如上所述,Y方向滑动件10沿着Y方向引导轴71在Y方向移动,并且,Y方向滑动件10和X方向滑动件70沿着X方向引导轴81在X方向移动。由此,配置于Y方向滑动件10的摄像元件单元110的摄像元件111如上所述在Y方向和X方向移动。
如上所述,霍尔元件41、42以与磁铁21、31的延伸部21a、31a对置的方式配置,通过检测磁场的强度来检测摄像元件111的X方向和方向的移动量。
如果利用霍尔元件41、42检测到的摄像元件111的移动量与上述的计算出的移动量不一致的话,则控制部51再次反复进行以下的动作:使X方向驱动构件20和Y方向驱动构件30的线圈23、33中流过电流而使摄像元件111移动,并利用霍尔元件41、42检测摄像元件111的移动量。
另外,作为X方向驱动构件(第一驱动构件)20和Y方向驱动构件(第二驱动构件)30,不限于使用磁铁21、22、31、32以及线圈23、33的磁力产生构件(音圈电机),也可以是压电元件及其他的驱动构件,优选使用磁力产生构件。
在以上说明了的本实施方式中,X方向驱动构件20和Y方向驱动构件30配置在光学系统单元120的周围、且分别配置在摄像模块100的相邻的2边侧。因此,根据本实施方式,在具有使手抖校正对象要素(摄像元件111)在与摄像面111a平行且相互交叉的2个方向(Y方向和X方向)移动的手抖校正机构1的摄像模块100中,能够实现小型化。
并且,在本实施方式中,陀螺仪传感器52和控制部51双方(至少一方)配置在光学系统单元120的周围、且隔着光学系统单元120而与Y方向驱动构件30对置配置。因此,即便使摄像模块100的俯视时的中心与镜头121的光轴一致或者相互接近,也能够有效地利用摄像模块100内的空间,从而能够实现摄像模块100的小型化。
并且,在本实施方式中,摄像元件单元110的柔性基板115在光学系统单元120的周围、且在隔着光学系统单元120而与X方向驱动构件20对置的空间中迂回。因此,即便使摄像模块100的中心与镜头121的光轴一致或者相互接近,也能够有效地利用摄像模块100内的空间,从而能够实现摄像模块100的小型化。
并且,在本实施方式中,X方向驱动构件20和Y方向驱动构件30双方(至少一方)包括线圈23、33和在与摄像面111a交叉的方向与线圈23、33对置的磁铁21、22、31、32。因此,能够将光学系统单元120周围的空间抑制得较小,从而能够实现摄像模块100的小型化。
另外,在本实施方式中,X方向驱动构件20和Y方向驱动构件30双方(至少一方)包括线圈23、33和隔着该线圈23、33在与摄像面111a交叉的方向相互对置的多个磁铁21、22、31、32。因此,能够进一步实现摄像模块100的小型化。
另外,在本实施方式中,X方向驱动构件20和Y方向驱动构件30双方(至少一方)包括线圈23、33、多个磁铁21、22、31、32、以及截面为在光学系统单元120侧开口的四边形状的磁轭24、34。因此,能够利用简单的结构提高驱动力。
并且,在本实施方式中,Y方向引导轴71和X方向引导轴81双方(至少一方)配置在摄像元件单元110的周围。因此,能够抑制摄像模块100占用的空间,从而进一步实现摄像模块100的小型化。
并且,在本实施方式中,光学系统单元120和摄像元件单元110从与摄像面111a交叉的方向上相互从相反侧固定于手抖校正机构1。因此,能够使摄像模块100的组装容易。
并且,在本实施方式中,X方向驱动构件20和Y方向驱动构件30使作为手抖校正对象要素的摄像元件111在X方向和Y方向移动。因此,能够进行手抖校正而不会产生像使光学系统单元120移动的情况那样的焦点的偏移(像模糊)。
另外,在本实施方式中,对将线圈23、33配置在Y方向滑动件10侧、并将磁铁21、22、31、32配置在固定侧即基座部80或者保持器60的例子进行了说明。但是,也可以将线圈配置在固定侧,并将磁铁配置在可动侧。
图11是本实施方式的第一变形例所涉及的摄像模块200的剖视图(相当于图5所示的沿着图4的V-V线的剖视图)。
在本变形例的摄像模块200中,摄像单元111不是手抖校正对象要素,光学系统单元120是手抖校正对象要素。
本变形例的摄像模块200在光学系统单元120被固定于Y方向滑动件210这点、以及摄像元件单元110被固定于保持器260这点上与上述的摄像模块100不同。
因此,Y方向滑动件210在贯通孔211沿着X方向滑动件70的Y方向引导轴71在Y方向移动,X方向滑动件70沿着基座部80的X方向引导轴81(在图11中未图示)在X方向移动,由此,光学系统单元120在X方向和Y方向移动。
这样,在本变形例中,X方向驱动构件20和Y方向驱动构件30使作为手抖校正对象要素的光学系统单元120在与摄像元件111的摄像面111a平行且相互交叉的X方向和Y方向移动。因此,与光学系统单元120例如在与摄像面111a平行的平面中旋转移动的情况相比较,即便未图示的自动对焦致动器(音圈电机)利用弹性体在光轴方向夹持镜头121,也能够防止弹性体振动而导致镜头121的位置变得不稳定,能够抑制焦点的偏移(图像的模糊)。
图12A和图12B是本实施方式的第二变形例所涉及的摄像模块300的剖视图(相当于图5所示的沿着图4的V-V线的剖视图和图6所示的沿着图4的VI-VI线的剖视图)。
本变形例的摄像模块300除了分别配置在摄像模块300的相邻的2边侧的X方向驱动构件20和Y方向驱动构件30之外,还具备与它们对置的X方向驱动构件320和Y方向驱动构件330。
X方向驱动构件320和Y方向驱动构件330与X方向驱动构件20和Y方向驱动构件30同样,包括磁铁321、322、331、332、线圈323、333以及磁轭324、334。
在本变形例中,将上述的控制部51、陀螺仪传感器52以及柔性基板115配置在上罩91和下罩92的外部,或者,虽然并未图示,也可以将X方向驱动构件320和Y方向驱动构件330的磁铁或线圈在镜头121的径向或者高度方向缩小而与控制部51、陀螺仪传感器52、柔性基板115一起配置。
根据本变形例,能够利用相互对置的X方向驱动构件20、320以及相互对置的Y方向驱动构件30、330来提高驱动力。
图13是本实施方式的第三变形例所涉及的摄像模块400的剖视图(相当于图5所示的沿着图4的V-V线的剖视图)。
对于本变形例的摄像模块400,Y方向滑动件410是通过将上述实施方式的玻璃罩保持器114和上述实施方式的Y方向滑动件10形成为一体而构成的,所述玻璃罩保持器114用于保持作为光透射性罩的玻璃罩113。根据本变形例,能够将摄像模块400形成为更简单的结构。
另外,图中画有表示剖面等的剖面线,但是,各个部分的材质并不由剖面线的种类限定。例如,Y方向滑动件10、保持器60、X方向滑动件70以及基座部80等作为一例由塑料形成,但是,也可以由除此以外的材质形成。并且,Y方向引导轴71、X方向引导轴81、上罩91以及下罩92等作为一例由金属形成,但是,也可以由除此以外的材质形成。
Claims (11)
1.一种摄像模块,所述摄像模块具备:
摄像元件单元,该摄像元件单元具有摄像元件;
光学系统单元,该光学系统单元用于在所述摄像元件形成被摄体像;以及
手抖校正机构,该手抖校正机构具有第一驱动构件和第二驱动构件,以所述摄像元件和所述光学系统单元中的至少一方作为手抖校正对象要素,所述第一驱动构件使所述手抖校正对象要素在与所述摄像元件的摄像面平行的第一方向移动,所述第二驱动构件使所述手抖校正对象要素在与所述摄像面平行且与所述第一方向交叉的第二方向移动,
所述摄像模块的特征在于,
所述摄像模块在与所述摄像面平行的平面中呈矩形状,
所述第一驱动构件和所述第二驱动构件配置在所述光学系统单元的周围,且分别配置于所述摄像模块的相邻的2边侧。
2.根据权利要求1所述的摄像模块,其特征在于,
所述摄像模块还具备:
手抖检测传感器;以及
控制部,该控制部对所述第一驱动构件和所述第二驱动构件进行控制,
所述手抖检测传感器和所述控制部中的至少一方配置在所述光学系统单元的周围,且隔着该光学系统单元而与所述第一驱动构件或者所述第二驱动构件对置配置。
3.根据权利要求1所述的摄像模块,其特征在于,
所述摄像元件单元具有柔性基板,
所述柔性基板在所述光学系统单元的周围、且在隔着该光学系统单元而与所述第一驱动构件或者所述第二驱动构件对置的空间中迂回。
4.根据权利要求1所述的摄像模块,其特征在于,
所述摄像模块还具备:
手抖检测传感器;以及
控制部,该控制部对所述第一驱动构件和所述第二驱动构件进行控制,
所述摄像元件单元具有柔性基板,
所述手抖检测传感器和所述控制部配置在所述光学系统单元的周围,且隔着该光学系统单元而与所述第一驱动构件和所述第二驱动构件中的一方对置配置,
所述柔性基板配置在所述光学系统单元的周围,且隔着该光学系统单元而与所述第一驱动构件和所述第二驱动构件中剩下的另一方对置配置。
5.根据权利要求1所述的摄像模块,其特征在于,
所述第一驱动构件和所述第二驱动构件中的至少一方以隔着所述光学系统单元对置的方式配置有多个。
6.根据权利要求1所述的摄像模块,其特征在于,
所述第一驱动构件和所述第二驱动构件中的至少一方包括线圈和磁铁,所述磁铁在与所述摄像面交叉的方向与所述线圈对置。
7.根据权利要求6所述的摄像模块,其特征在于,
所述第一驱动构件和所述第二驱动构件中的至少一方包括所述线圈和多个所述磁铁,多个所述磁铁隔着该线圈在与所述摄像面交叉的方向上相互对置。
8.根据权利要求7所述的摄像模块,其特征在于,
所述第一驱动构件和所述第二驱动构件中的至少一方包括所述线圈、所述多个磁铁以及磁轭,所述磁轭的截面形成为包围所述线圈和所述磁铁、且在所述光学系统单元侧开口的四边形状。
9.根据权利要求1所述的摄像模块,其特征在于,
所述手抖校正机构还具有:
第一可动部,所述手抖校正对象要素配置于该第一可动部,该第一可动部在所述第一方向移动;
第二可动部,该第二可动部与所述第一可动部一起在所述第二方向移动;
第一引导轴,该第一引导轴在所述第一方向引导所述第一可动部;以及
第二引导轴,该第二引导轴在所述第二方向引导所述第二可动部,
所述第一引导轴和所述第二引导轴中的至少一方配置在所述摄像元件单元的周围。
10.根据权利要求1所述的摄像模块,其特征在于,
所述光学系统单元和所述摄像元件单元在与所述摄像面交叉的方向上相互从相反侧固定于所述手抖校正机构。
11.根据权利要求1所述的摄像模块,其特征在于,
所述手抖校正机构还具有:
第一可动部,所述手抖校正对象要素配置于该第一可动部,该第一可动部在所述第一方向移动;以及
第二可动部,该第二可动部与所述第一可动部一起在所述第二方向移动,
所述摄像元件单元还具有光透射性罩,该光透射性罩配置在所述摄像元件与所述光学系统单元之间,
所述第一可动部和所述第二可动部中的至少一方保持所述光透射性罩。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010064176A JP2011197411A (ja) | 2010-03-19 | 2010-03-19 | 撮像モジュール |
| JP2010-064176 | 2010-03-19 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN102196174A true CN102196174A (zh) | 2011-09-21 |
Family
ID=44603490
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN2011100512379A Withdrawn CN102196174A (zh) | 2010-03-19 | 2011-03-03 | 摄像模块 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US8514287B2 (zh) |
| JP (1) | JP2011197411A (zh) |
| CN (1) | CN102196174A (zh) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111258083A (zh) * | 2018-11-30 | 2020-06-09 | 日本电产三协株式会社 | 带抖动校正功能的光学单元 |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20130085349A1 (en) | 2011-06-21 | 2013-04-04 | Yofimeter, Llc | Analyte testing devices |
| WO2015104892A1 (ja) * | 2014-01-08 | 2015-07-16 | 富士フイルム株式会社 | 撮像モジュールの製造方法及び撮像モジュール製造装置 |
| US9560247B2 (en) * | 2014-05-30 | 2017-01-31 | Apple Inc. | Optical image stabilization compensations |
| US11381747B2 (en) | 2015-02-13 | 2022-07-05 | Apple Inc. | Dual camera magnet arrangement |
| US9781345B1 (en) | 2015-02-13 | 2017-10-03 | Apple Inc. | Dual camera magnet arrangement |
| US10063783B2 (en) * | 2015-09-30 | 2018-08-28 | Apple Inc. | Mobile zoom using multiple optical image stabilization cameras |
| US10382698B2 (en) | 2015-09-30 | 2019-08-13 | Apple Inc. | Mobile zoom using multiple optical image stabilization cameras |
| KR101991468B1 (ko) * | 2017-03-22 | 2019-09-30 | 마이크로엑츄에이터(주) | 액추에이터 |
| WO2018221039A1 (ja) * | 2017-05-30 | 2018-12-06 | ソニー株式会社 | ぶれ補正装置及び撮像装置 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006113545A (ja) * | 2004-10-12 | 2006-04-27 | Samsung Electronics Co Ltd | カメラレンズアセンブリーの手振れ補正装置 |
| JP2006295553A (ja) * | 2005-04-11 | 2006-10-26 | Tamron Co Ltd | 像振れ防止機能を有する撮像装置 |
| JP2006330678A (ja) * | 2005-05-26 | 2006-12-07 | Samsung Electronics Co Ltd | カメラレンズアセンブリの手振れ補正装置 |
| CN101154013A (zh) * | 2006-09-29 | 2008-04-02 | 富士能株式会社 | 摄像装置 |
| WO2009139543A1 (ko) * | 2008-05-14 | 2009-11-19 | (주)하이소닉 | 떨림 보정기능이 구비된 영상 촬영 장치 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0266536A (ja) * | 1988-09-01 | 1990-03-06 | Canon Inc | カメラ |
| JPH07168235A (ja) * | 1993-12-14 | 1995-07-04 | Sony Corp | 光軸補正用レンズの駆動機構 |
| JPH08146480A (ja) * | 1994-11-22 | 1996-06-07 | Sony Corp | 光軸補正用レンズの位置センサ |
| US7327952B2 (en) * | 2004-07-26 | 2008-02-05 | Pentax Corporation | Stage apparatus and camera shake correction apparatus using the stage apparatus |
| JP2008197571A (ja) * | 2007-02-15 | 2008-08-28 | Fujinon Corp | 像ブレ補正ユニット、像ブレ補正装置、および撮影装置 |
| JP2008310175A (ja) * | 2007-06-15 | 2008-12-25 | Fujinon Corp | 像ブレ補正ユニット、像ブレ補正装置、撮影装置、および携帯機器 |
| EP2014886A1 (en) * | 2007-07-09 | 2009-01-14 | Delphi Technologies, Inc. | Reservoir for a fluid dosing system |
| CN102016708B (zh) * | 2008-04-30 | 2013-07-31 | 日本电产三协株式会社 | 带抖动修正功能的光学单元 |
| KR100935312B1 (ko) * | 2008-06-09 | 2010-01-06 | 삼성전기주식회사 | 초소형 카메라 모듈용 손떨림 보정장치 |
| JP5465500B2 (ja) * | 2008-10-20 | 2014-04-09 | 日本電産サンキョー株式会社 | 振れ補正機能付き光学ユニット、および振れ補正機能付き光学ユニットにおける振れ補正制御方法 |
-
2010
- 2010-03-19 JP JP2010064176A patent/JP2011197411A/ja active Pending
-
2011
- 2011-03-03 CN CN2011100512379A patent/CN102196174A/zh not_active Withdrawn
- 2011-03-09 US US13/043,847 patent/US8514287B2/en active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006113545A (ja) * | 2004-10-12 | 2006-04-27 | Samsung Electronics Co Ltd | カメラレンズアセンブリーの手振れ補正装置 |
| JP2006295553A (ja) * | 2005-04-11 | 2006-10-26 | Tamron Co Ltd | 像振れ防止機能を有する撮像装置 |
| JP2006330678A (ja) * | 2005-05-26 | 2006-12-07 | Samsung Electronics Co Ltd | カメラレンズアセンブリの手振れ補正装置 |
| CN101154013A (zh) * | 2006-09-29 | 2008-04-02 | 富士能株式会社 | 摄像装置 |
| WO2009139543A1 (ko) * | 2008-05-14 | 2009-11-19 | (주)하이소닉 | 떨림 보정기능이 구비된 영상 촬영 장치 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111258083A (zh) * | 2018-11-30 | 2020-06-09 | 日本电产三协株式会社 | 带抖动校正功能的光学单元 |
| US11347074B2 (en) | 2018-11-30 | 2022-05-31 | Nidec Sankyo Corporation | Optical unit having shake correction function |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2011197411A (ja) | 2011-10-06 |
| US20110228111A1 (en) | 2011-09-22 |
| US8514287B2 (en) | 2013-08-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN102196174A (zh) | 摄像模块 | |
| US20210080808A1 (en) | Anti-shake compensation structure for auto-focus | |
| KR100935312B1 (ko) | 초소형 카메라 모듈용 손떨림 보정장치 | |
| KR101973434B1 (ko) | 손떨림 보정 반사모듈 및 이를 포함하는 카메라 모듈 | |
| KR101231486B1 (ko) | 상 흔들림 보정 장치, 렌즈 장치 및 촬상 장치 | |
| JP5797627B2 (ja) | 撮像装置 | |
| KR101241633B1 (ko) | 상 흔들림 보정 장치의 제조 방법 | |
| US7619838B2 (en) | Image stabilizer, lens device and imaging apparatus | |
| JP4935308B2 (ja) | 像ぶれ補正装置、レンズ鏡筒及び撮像装置 | |
| JP5997992B2 (ja) | 撮像装置 | |
| US8369698B2 (en) | Image blur correction apparatus and camera | |
| KR20140144126A (ko) | 카메라 렌즈 어셈블리 | |
| JP4661915B2 (ja) | 像ぶれ補正装置、レンズ鏡筒装置及びカメラ装置 | |
| JP2007156351A (ja) | 像ぶれ補正装置、レンズ装置及び撮像装置 | |
| JP2008191267A (ja) | 像ぶれ補正装置、レンズ鏡筒及び撮像装置 | |
| JP2008287034A (ja) | アクチュエータ、およびその製造方法、撮像機器、ならびに携帯電子機器 | |
| JP2010015107A (ja) | ブレを補正する撮像装置 | |
| JP2011004075A (ja) | ブレ補正装置 | |
| JP5997993B2 (ja) | 撮像装置 | |
| JP5104423B2 (ja) | カメラ装置及びレンズ鏡筒装置 | |
| JP2010231043A (ja) | 像振れ補正装置、撮像レンズユニット、及びカメラユニット | |
| JP2012032526A (ja) | 像振れ補正装置及びカメラ | |
| KR102653202B1 (ko) | 카메라 모듈 | |
| KR101511065B1 (ko) | 렌즈 구동용 엑츄에이터 및 이를 포함하는 카메라 렌즈 조립체 | |
| US20240080560A1 (en) | Camera actuator and camera module including same |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C04 | Withdrawal of patent application after publication (patent law 2001) | ||
| WW01 | Invention patent application withdrawn after publication |
Application publication date: 20110921 |