CN101799552B - 双系统组合卫星导航接收机定位方法 - Google Patents
双系统组合卫星导航接收机定位方法 Download PDFInfo
- Publication number
- CN101799552B CN101799552B CN2010101230178A CN201010123017A CN101799552B CN 101799552 B CN101799552 B CN 101799552B CN 2010101230178 A CN2010101230178 A CN 2010101230178A CN 201010123017 A CN201010123017 A CN 201010123017A CN 101799552 B CN101799552 B CN 101799552B
- Authority
- CN
- China
- Prior art keywords
- satellite
- receiver
- centerdot
- pseudo
- rho
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images




Landscapes
- Position Fixing By Use Of Radio Waves (AREA)
Abstract
本发明公开了一种双系统组合卫星导航接收机定位方法。首先获取卫星位置及伪距观测量;然后根据观测卫星的不同情况,采用不同的步骤来完成接收机定位处理,获取接收机位置;最后输出定位结果。该方法根据可见卫星个数有两种解决方案,其一,是当两个卫星系统均有三颗可见卫星的情况,利用一元二次方程的代数处理方法可以最终获得接收机的位置;其二,是当两个卫星系统可见七颗及七颗以上卫星的情况,利用观测信息的冗余性将观测方程组转化为一次方程组,最终利用最小二乘方法直接进行处理。该方法不需要导航位置初始估计值,也不需要迭代运算处理,可使接收机在深空探测及其它特殊环境中得到可靠的定位结果。
Description
技术领域
本发明属于卫星导航通信领域,具体涉及一种双系统组合卫星导航接收机定位方法。
背景技术
全球卫星导航定位系统已经成为全球发展最快的信息产业之一,可以给用户提供定位、测速和授时等服务,并具有全球性、全天候、连续性和实时性的特点。目前已有的两大卫星定位系统是美国的全球定位系统(Global Position System,简称为GPS)和俄罗斯的GLONASS系统(GLObal Navigation Satellite System,简称为GLONASS),处于设计建造阶段的主要有欧洲的伽利略系统和中国的BD2系统(Compass system,通常称为BD2)。双系统组合或多系统组合卫星导航接收机将比单系统卫星接收机具有更高的可靠性、可用性。因此,双系统组合或多系统组合卫星导航接收机成为目前研究的热点。
单系统卫星导航定位时,伪距观测方程中,含有3个接收机位置未知数和1个接收机相对于卫星系统钟差未知数,因此,单系统卫星导航定位处理至少需要4个观测量,至少需要4颗可见卫星;双系统组合卫星导航定位时,伪距观测方程中,含有3个接收机位置未知数和接收机相对于2个卫星系统的钟差未知数,因此,双系统卫星导航定位处理至少需要5个观测量,至少需要5颗可见卫星;依次类推,多系统组合时,需要更多的可见卫星提供观测信息进行定位处理。
在获得伪距观测量后,通常的方法是将观测方程线性化,而后采用最小二乘法或卡尔曼滤波方法进行导航定位处理。由于在一些特殊环境中,如深空探测、仰角约束较为苛刻的山区等,卫星导航接收机的可见卫星位置分布比较差,可能会导致最小二乘法及卡尔曼滤波方法发散、不收敛,因此,Bancroft等人提出了一类可以不经过线性化而直接对卫星观测的非线性方程组进行处理的方法,利用此类方法可以避免迭代发散问题,保证定位结果的稳定可靠。
目前,针对单系统直接定位处理的主要方法有:
美国的Bancroft于1985年提出的Bancroft方法:这是一种不需要迭代的全局性非线性最小二乘方法,主要依据是四维空间下的洛伦兹(Lorentz)内积;
Krause于1987年提出的Krause方法:这是一种针对GPS类型导航方程的代数化解析处理的方法,Krause方法利用可见卫星构造测量平面,并选择其中一个作为参考测量平面,根据参考测量平面,构造一个垂直于该平面的辅助向量,推导了卫星到接收机向量与辅助向量及接收机钟差的线性关系;
Abel.J.S于1991年提出的Abel方法:这是一种直接处理GPS导航方程的代数方法,Abel方法选择一颗卫星作为参考卫星,并将其作为新坐标系的坐标原点,在此定义下,重新改写观测方程,并经过推导最终得到关于接收机位置的一个一元二次方程,直接求解一元二次方程获得两个可能解,然后根据条件进行错误解的排除,最终获得正确的定位结果。
上述这些方法都是针对单系统定位应用的,对于双系统组合定位处理,由于多了一个钟差未知数,导致双系统卫星导航接收机的观测方程组不同于单系统的观测方程组,这使得这些方法不再适用于双系统卫星导航接收机。
常规的观测方程线性化处理方法为:
双系统组合定位接收机同时观测到N颗卫星时,可以得到如下观测方程组:
式中,ρi(t)表示伪距测量值,Di(t)为卫星到接收机的真实距离,c为光速,δtk(t)为接收机时钟相对两个系统的钟差,下标i表示观测卫星的标号,下标k表示两个不同的卫星导航定位系统,由于每个卫星导航定位系统都采用单独定义并维持的时间系统,且这些时间系统之间存在不固定的偏差,因此,双系统定位解算时,将会有两个接收机钟差,分别表示对两个单独的时间系统的偏差。
式中,Xi为卫星坐标列向量,Xi=[xi yi zi]T,xi、yi、zi表示卫星的三维坐标,Xu为接收机坐标列向量,Xu=[xu yu zu]T,xu、yu、zu表示接收机的三维坐标。
将Di(t)在接收机初始位置估计值(x0,y0,z0)处用泰勒级数展开,并且只取其一次近似,这样可以将非线性方程改写为线性化的形式:
Di(t)=[-li(t),-mi(t),-ni(t)][δx,δy,δz]T+Di0(t) (3)
式中, li、mi、ni为从(x0,y0,z0)到观测卫星i的方向余弦,δx,δy,δz为接收机位置的改正数。
对观测方程组进行整理可得如下矩阵形式:
H(t)δT+L(t)=0 (4)
假设卫星1~卫星j属于第一系统,卫星j+1~卫星N属于第二系统,(4)式中的矩阵分别为:
其中,H(t)矩阵表示方向余弦矩阵,δT表示待求矩阵,L(t)表示伪距观测量与初始距离估计值的差。
利用最小二乘法可以求得δT:
δT=-(H(t)TH(t))-1(H(t)TL(t)) (5)
上述常规的观测方程线性化的方法在通常情况下都可以得到很好的定位结果,但是在一些特殊应用环境中,如深空探测等,有可能会使定位结果不收敛,不能保证可靠地定位。
发明内容
本发明的目的:提供双系统组合卫星导航接收机定位方法,使得双系统接收机在深空探测等特殊使用环境中仍然可以得到可靠有效的定位结果。
本发明的双系统组合卫星导航接收机定位方法包括如下步骤:
步骤1:获取卫星位置及伪距观测量;
在接收机跟踪到卫星信号后,根据获得的导航电文,得到卫星的位置;同时由接收机基带模块得到卫星的伪距测量值;
步骤2:获取接收机位置;
根据观测卫星的两种不同情况,采用不同的步骤来完成接收机定位处理:
第一种情况:两个卫星导航系统分别有三颗可见卫星的情况;
第二种情况:两个卫星导航系统一共有七颗或七颗以上可见卫星的情况。
下面针对两种不同情况,分别介绍定位处理的方法步骤:
1、两个卫星导航系统分别有三颗可见卫星的情况
此种情况下,定位处理的步骤如下:
步骤2.1.1:整理六颗观测卫星的位置及伪距测量值;
不失一般性,设第一卫星、第二卫星和第三卫星属于第一系统,第四卫星、第五卫星和第六卫星属于第二系统;选择第一卫星作为第一系统的参考卫星、选择第四卫星作为第二系统的参考卫星,根据步骤1已经得到这六颗可见卫星的位置Xi、伪距测量值ρi。Xi为卫星坐标列向量,Xi=[xi yi zi]T,ρi=Di+c*δtk,其中Di为第i卫星到接收机的真实距离,c为光速,δtk为接收机时钟相对第一系统和第二系统的钟差,其中i=1,2,3,…,6;当i=1,2,3时,k=1;当i=4,5,6时,k=2;
步骤2.1.2:获取非参考卫星与参考卫星的伪距测量值之差;
利用第二卫星、第三卫星的伪距测量值与第一卫星的伪距测量值做差,利用第五卫星、第六卫星的伪距测量值与第四卫星的伪距测量值做差,得到非参考卫星与参考卫星的伪距测量值之差di,i=2,3,5,6;
步骤2.1.3:构造接收机位置与参考卫星真实距离之间的线性关系;
利用步骤1中得到的卫星位置、步骤2.1.2中得到的伪距测量值之差,构造接收机位置与第一系统参考卫星到接收机的真实距离D1和第二系统参考卫星到接收机的真实距离D4的线性关系方程;
步骤2.1.4:构造第一系统参考卫星到接收机的真实距离D1和第二系统参考卫星到接收机的真实距离D4的代数关系;
将第一系统参考卫星到接收机的真实距离D1和第二系统参考卫星到接收机的真实距离D4作为未知数,利用已有观测信息构造关于D1和D4的方程;
步骤2.1.5获取接收机到参考卫星的真实距离,并进行结果的取舍;
将步骤2.1.4中得到的D1和D4的一次关系式代入二次关系式中,得到关于D4的一元二次方程,利用此一元二次方程可以获得D4的两个结果,继而由D1和D4的一次关系式得到D1的两个结果,从而得到两组解,根据如下原则进行解的取舍:
(a)根据D1和D4的物理意义,应满足条件:D1>0,D4>0;
(b)根据矢量关系式:|‖x‖-‖y‖|≤‖x-y‖,D1=‖X1-Xu‖,D4=‖X4-Xu‖,因此D1和D4还应满足条件:|D1-D4|≤‖X1-X4‖
(c)δt1=tR-Tsat1,δt2=tR-Tsat2,其中,tR是接收机时钟,Tsat1是第一系统的系统时间,Tsat2是第二系统的系统时间,因此,δt1-δt2=Tsat2-Tsat1。
根据:ρ1=D1+c*δt1,ρ4=D4+c*δt2可以得到:|c*δt2-c*δt1|=|ρ4-D4-ρ1+D1|。由于第一系统和第二系统的时间偏差范围是已知的,且通常不会很大,设其最大值为dtmax,则|ρ4-D4-ρ1+D1|≤c*dtmax
经过上面三个条件的排除,将得到一组唯一的D1和D4;
步骤2.1.6:获得接收机位置向量和接收机相对两个系统的钟差;
将步骤2.1.5中得到的D1和D4的值代入到步骤2.1.3中得到的接收机位置Xu与D1和D4的线性关系方程中,获得接收机位置Xu,同时利用ρ1=D1+c*δt1,ρ4=D4+c*δt2得到接收机相对两个系统的钟差δt1和δt2。
2、两个卫星导航系统一共有七颗或七颗以上可见卫星的情况
此种情况下,定位方法的步骤如下:
步骤2.2.1:整理同时观测到的七颗或七颗以上卫星的位置及伪距测量值;
不失一般性,假设某时刻同时观测到N颗卫星,其中N1颗卫星属于第一系统,剩余N2颗卫星属于第二系统。N、N1和N2满足条件:N、N1和N2均为正整数,且N≥7,1≤N1<N,N2=N-N1;
步骤2.2.2:将未知数及其平方项作为新的未知数,构造新的线性矩阵方程;
整理观测方程,通过取平方去掉开方项,并将方程中的未知数xu,yu,zu,b1,b2及其平方项xu 2,yu 2,zu 2,b1 2,b2 2作为新的待求未知数,并令:f1=xu,f2=yu,f3=zu,f4=b1,f5=b2, 构造出新的线性矩阵方程;
步骤2.2.3:根据新的线性矩阵方程,得到接收机位置和接收机相对两个系统的钟差;
利用最小二乘法处理步骤2.2.2所得到的新的线性矩阵方程,从而得到接收机位置Xu=[xu yu zu]T、接收机相对第一系统的钟差δt1以及接收机相对第二系统的钟差δt2。
步骤3:输出定位结果。
将得到的接收机位置Xu=[xu yu zu]T、接收机相对第一系统的钟差δt1以及接收机相对第二系统的钟差δt2通过通讯接口输出给用户。
本发明具有如下优点:
(1)在可见卫星满足条件时,利用本发明提供的定位方法能够保证在特殊使用环境中仍然能提供有效可靠的定位结果;
(2)本发明所提出的定位方法不需要对接收机的位置进行估计;
(3)本发明所提出的定位方法处理过程不需要迭代运算,不存在发散问题,保证了导航定位的可靠性。
附图说明
图1是本发明双系统组合卫星导航接收机定位方法流程图;
图2是本发明两个卫星导航系统分别有三颗可见卫星时的处理流程图;
图3是本发明两个卫星导航系统一共有七颗或七颗以上可见卫星时的处理流程图;
图4是现有线性化方法在两个卫星导航系统分别有三颗可见卫星时的定位误差结果;
图5是本发明方法在两个卫星导航系统分别有三颗可见卫星时的定位误差结果;
图6是现有线性化方法在两个卫星导航系统一共有七颗可见卫星时的定位误差结果;
图7是本发明方法在两个卫星导航系统一共有七颗可见卫星时的定位误差结果。
具体实施方式
下面结合附图对本发明的具体实施方式进行说明。
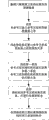
本发明所述的是一种双系统组合卫星导航接收机定位方法,如图1所示,该方法包括如下步骤:
步骤1:获取卫星位置及伪距观测量;
在接收机跟踪到卫星信号后,根据获得的导航电文,得到卫星的位置;同时由接收机基带模块得到卫星的伪距测量值;
步骤2:获取接收机位置;
根据观测卫星的不同情况,采用不同的步骤来完成接收机定位处理,下面针对两种不同情况,分别对接收机定位方法步骤进行详细说明。
第一种情况:两个卫星导航系统分别有三颗可见卫星的情况
该种情况中接收机定位处理流程如图2所示,具体步骤如下:
步骤2.1.1:整理六颗观测卫星的位置及伪距测量值;
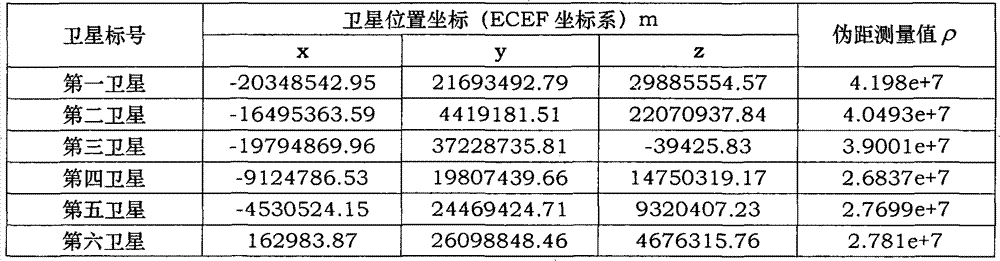
假设第一卫星、第二卫星和第三卫星属于第一系统,第四卫星、第五卫星和第六卫星属于第二系统;选择第一卫星作为第一系统的参考卫星、选择第四卫星作为第二系统的参考卫星。根据步骤1已经得到这六颗可见卫星的位置Xi、伪距测量值ρi。Xi为卫星坐标列向量,Xi=[xi yi zi]T,ρi=Di+c*δtk,其中Di为第i卫星到接收机的真实距离,c为光速,δtk为接收机时钟相对第一系统和第二系统的钟差,其中i=1,2,3,…,6;当i=1,2,3时,k=1;当i=4,5,6时,k=2。
某时刻,六颗可见卫星的坐标值及观测伪距测量值如表1所示:
表1实施实例1可见六颗星卫星坐标及伪距观测值
步骤2.1.2:获取非参考卫星与参考卫星的伪距测量值之差;
利用第二卫星、第三卫星的伪距测量值与第一卫星伪距测量值做差,利用第五卫星、第六卫星的伪距测量值与第四卫星伪距测量值做差,得到非参考卫星与参考卫星的伪距测量值之差di,其中i=2,3,5,6,有:
其中,ρ1为第一卫星伪距测量值,ρ2为第二卫星伪距测量值,ρ3为第三卫星伪距测量值,ρ4为第四卫星伪距测量值,ρ5为第五卫星伪距测量值,ρ6为第六卫星伪距测量值;D1为第一卫星到接收机的真实距离,D2为第二卫星到接收机的真实距离,D3为第三卫星到接收机的真实距离,D4为第四卫星到接收机的真实距离,D5为第五卫星到接收机的真实距离,D6为第六卫星到接收机的真实距离。
步骤2.1.3:构造接收机位置与参考卫星真实距离之间的线性关系;
利用步骤1中得到的卫星位置、步骤2.1.2中得到的伪距测量值之差,构造接收机位置与第一系统参考卫星到接收机的真实距离D1和第二系统参考卫星到接收机的真实距离D4的线性关系方程。
将步骤2.1.2中得到的伪距测量值之差di移项后取平方,可得下式:
因为 则 其中ri为卫星到地心的距离,ri=|Xi|;ru为接收机到地心的距离,ru=|Xu|;Xu为接收机坐标列向量,Xu=[xu yu zu]T。将此关系代入到上式中,得到如下方程:
经过化简后,可以得到:
令: 将上式中的后三个方程写成矩阵的形式:
2AXu=B1D1+B2D4+C (10)
其中:
进一步得到接收机位置与第一系统参考卫星到接收机的真实距离D1以及第二系统参考卫星到接收机的真实距离D4的线性关系方程:
Xu=(2A)-1(B1D1+B2D4+C) (11)
其中D1和D4此刻仍为未知量,由后续步骤获得;
步骤2.1.4:构造第一系统参考卫星到接收机的真实距离D1和第二系统参考卫星到接收机的真实距离D4的代数关系;
将第一系统参考卫星到接收机的真实距离D1和第二系统参考卫星到接收机的真实距离D4作为未知数,利用已有观测信息构造关于D1和D4的方程。
Xu∈R3,可以通过线性变化得到:
继而得到:
由此得到D1和D4的第一个关系式:
D1=c5D4+c6 (13)
其中:
由接收机到第一系统参考卫星和第二系统参考卫星的距离可以得到:
两式做差可以得到D1和D4的第二个关系式:
令 可得:
步骤2.1.5:获取接收机到参考卫星的真实距离,并进行结果的取舍;
将步骤2.1.4中得到的D1和D4的第一个关系式(13)代入第二个关系式公式(16)中,得到关于D4的一元二次方程:
其中: a2=(2c5c6+c5Y2A-1B1+Y2A-1B2),
利用此一元二次方程可以得到D4的两个结果:
在表1所给条件下,分别得到如下中间参量的值:
c1=2.2125e+12,c2=8.8756e+12,c3=1.4673e+12,c4=1.1074e+12,c5=1.1529,c6=1.1498e+7,a1=0.32923,a2=2.9677e+7,a3=-8.9448e+14。
将a1、a2和a3代入公式(18),得到的D4的两个结果分别为2.3837e+7和-1.1398e+8。
根据步骤2.1.4中D1和D4的一次关系式(13),由D4得到D1的两个结果,从而得到两组解,根据如下原则进行解的取舍:
(a)根据D1和D4的物理意义,应满足条件:D1>0,D4>0;
(b)根据矢量关系式:|‖x‖-‖y‖|≤‖x-y‖,D1=‖X1-Xu‖,D4=‖X4-Xu‖,因此D1和D4还应满足条件:|D1-D4|≤‖X1-X4‖
(c)δt1=tR-Tsat1,δt2=tR-Tsat2,其中,tR是接收机时钟,Tsat1是第一系统的系统时间,Tsat2是第二系统的系统时间,因此,δt1-δt2=Tsat2-Tsat1。
根据:ρ1=D1+c*δt1,ρ4=D4+c*δt2得到:|c*δt2-c*δt1|=|ρ4-D4-ρ1+D1|。由于第一系统和第二系统的时间偏差范围是已知的,且通常不会很大,设其最大值为dtmax,则|ρ4-D4-ρ1+D1|≤c*dtmax
经过上面三个条件的排除,D4的第二个结果-1.1398e+8被排除,从而得到一组唯一的D1和D4,D1=3.898e+7,D4=2.3837e+7;
步骤2.1.6:获得接收机位置向量和接收机相对两个系统的钟差;
将步骤2.1.5中得到的D1和D4的值代入到公式(11)中,得到接收机位置Xu。在本实例中,Xu=[-2.1775e+6 4.3889e+6 4.07e+6]。同时利用ρ1=D1+c*δt1,ρ4=D4+c*δt2得到接收机相对两个系统的钟差δt1和δt2。在本实例中,得到δt1=0.01,δt2=0.0100005。
第二种情况:两个卫星导航系统一共有七颗或七颗以上可见卫星的情况
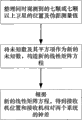
该种情况中接收机定位处理流程如图3所示,具体步骤如下:
步骤2.2.1:整理同时观测到的七颗或七颗以上卫星的位置及伪距测量值;
假设某时刻同时观测到N颗卫星,其中N1颗卫星属于第一系统,剩余N2颗卫星属于第二系统;N、N1和N2满足条件:N、N1和N2均为正整数,且N≥7,1≤N1<N,N2=N-N1;
由此可得N个观测方程:
其中:b1=c*δt1,b2=c*δt2;
假设某时刻同时观测到七颗卫星,其中三颗卫星属于第一系统,剩余四颗卫星属于第二系统.由此可得七个观测方程:
其中:b1=c*δt1,b2=c*δt2。
某时刻,七颗可见卫星的坐标值及观测伪距测量值如表2所示:
表2实施实例2可见七颗星卫星坐标及伪距观测值
| 第一卫星 | -20348542.95 | 21693492.79 | 29885554.57 | 3.9001e+7 |
| 第二卫星 | -16495363.59 | 4419181.51 | 22070937.84 | 2.6001e+7 |
| 第三卫星 | -19794869.96 | 37228735.81 | -39425.83 | 4.0493e+7 |
| 第四卫星 | -9124786.53 | 19807439.66 | 14750319.17 | 2.3302e+7 |
| 第五卫星 | -4530524.15 | 24469424.71 | 9320407.23 | 2.4189e+7 |
| 第六卫星 | 162983.87 | 26098848.46 | 4676315.76 | 2.5144e+7 |
| 第七卫星 | 5686092.62 | 24212484.84 | 9298041.93 | 2.5258e+7 |
步骤2.2.2:将未知数及其平方项作为新的未知数,构造新的线性矩阵方程;
整理观测方程,通过取平方去掉开方项,并将方程中的未知数xu,yu,zu,b1,b2及其平方项xu 2,yu 2,zu 2,b1 2,b2 2作为新的待求未知数,并令:f1=xu,f2=yu,f3=zu,f4=b1,f5=b2, 可以得到如下的线性矩阵方程:
EF=G (21)
其中:
根据表2数据可以得到在本实例中的值:
步骤2.2.3:根据新的线性矩阵方程,得到接收机位置和接收机相对两个系统的钟差;
利用最小二乘法处理步骤2.2.2所得到的新的线性矩阵方程(21),从而得到F=(ETE)-1(ETG),然后根据f1=xu,f2=yu,f3=zu,f4=f1,f5=f2,得到接收机位置Xu=[xu yu zu]T、接收机相对第一系统的钟差δt1以及接收机相对第二系统的钟差δt2。
利用步骤2.2.2中的矩阵E和G的值,得到本实例中 进而得到接收机位置Xu=[-2.1775e+6 4.3889e+6 4.07e+6]T和接收机相对两个系统的钟差:δt1=0.01,δt2=0.0100005。
步骤3:输出定位结果。
将得到的接收机位置Xu=[xu yu zu]T、接收机相对第一系统的钟差δt1以及接收机相对第二系统的钟差δt2通过通讯接口输出给用户。
在本实例中,将解算得到的接收机位置Xu=[-2.1775e+6 4.3889e+6 4.07e+6]T、接收机相对第一系统的钟差δt1=0.01以及接收机相对第二系统的钟差δt2=0.0100005通过通讯接口输出给用户。
用同样的方法对多个历元时刻进行定位仿真,设定接收机由位置(-2177528,4388901,4070001)向(-2.816e7,5.5023e7,2.145e7)运动,对整个运动过程进行定位分析,并与常规的线性化方法进行对比,其中的线性化方法是指将观测方程线性化的方法,其对比结果如图4,图5,图6和图7所示。其中图4是线性化方法在两个卫星导航系统分别有三颗可见卫星时的定位误差结果,图5是本发明方法在两个卫星导航系统分别有三颗可见卫星时的定位误差结果,图6是线性化方法在两个卫星导航系统一共有七颗可见卫星时的定位误差结果,图7是本发明方法在两个卫星导航系统一共有七颗可见卫星时的定位误差结果。在图4~图7中,当定位结果发散时,为了表示方便,当误差绝对值大于1e7时,令误差绝对值为1e7。由图4和图6可以看到,线性化方法在某些时刻定位结果发散,定位误差绝对值大于1e7,因此线性化方法有可能无法得到正确的定位结果,由图5和图7可以看到,本发明提出的方法在线性化方法发散时,仍然可以得到可靠的定位结果,误差在±150m以内,可以保证接收机得到可靠的定位结果。本发明提出的方法不需要有接收机初始位置的估计值,不需要迭代运算处理,因此适合在深空探测等特殊环境中使用。
Claims (1)
1.双系统组合卫星导航接收机定位方法,该方法包括如下步骤:
步骤1:获取卫星位置及伪距观测量;
在接收机跟踪到卫星信号后,根据获得的导航电文,得到卫星的位置Xi;同时由接收机基带模块得到卫星的伪距测量值ρi;
其特征在于,该方法还包括如下步骤:
步骤2:获取接收机位置;
根据观测卫星的两种不同情况,采用不同的步骤来完成接收机定位处理:
第一种情况:两个卫星导航系统分别有三颗可见卫星的情况;
步骤2.1.1:整理六颗观测卫星的位置及伪距测量值;
假设第一卫星、第二卫星和第三卫星属于第一系统,第四卫星、第五卫星和第六卫星属于第二系统;选择第一卫星作为第一系统的参考卫星、选择第四卫星作为第二系统的参考卫星;
根据步骤1已经得到这六颗可见卫星的位置Xi、伪距测量值ρi,Xi为卫星坐标列向量,Xi=[xi yi zi]T,xi、yi、zi表示卫星的三维坐标,ρi=Di+c*δtk,其中Di为第i卫星到接收机的真实距离,c为光速,δtk为接收机时钟相对第一系统和第二系统的钟差,其中i=1,2,3,…,6;当i=1,2,3时,k=1;当i=4,5,6时,k=2;
步骤2.1.2:获取非参考卫星与参考卫星的伪距测量值之差;
利用第二卫星、第三卫星的伪距测量值与第一卫星的伪距测量值做差,利用第五卫星、第六卫星的伪距测量值与第四卫星的伪距测量值做差,求得非参考卫星与参考卫星的伪距测量值之差di,i=2,3,5,6,有:
其中,ρ1为第一卫星伪距测量值,ρ2为第二卫星伪距测量值,ρ3为第三卫星伪距测量值,ρ4为第四卫星伪距测量值,ρ5为第五卫星伪距测量值,ρ6为第六卫星伪距测量值;D1为第一卫星到接收机的真实距离,D2为第二卫星到接收机的真实距离,D3为第三卫星到接收机的真实距离,D4为第四卫星到接收机的真实距离,D5为第五卫星到接收机的真实距离,D6为第六卫星到接收机的真实距离;
步骤2.1.3:构造接收机位置与参考卫星真实距离之间的线性关系;
利用步骤1中得到的卫星位置、步骤2.1.2中得到的伪距测量值之差,构造接收机位置与第一系统参考卫星到接收机的真实距离D1和第二系统参考卫星到接收机的真实距离D4的线性关系方程;
将步骤2.1.2中得到的伪距测量值之差di移项后取平方,得到下式:
因为 则 其中ri为卫星到地心的距离,ri=|Xi|;ru为接收机到地心的距离,ru=|Xu|;Xu为接收机坐标列向量,Xu=[xu yu zu]T,xu、yu、zu表示接收机的三维坐标;将此关系代入到上式中,得到如下方程:
经过化简后,得到:
令: 将上式中的后三个方程写成矩阵的形式:
2AXu=B1D1+B2D4+C (5)
其中:
进一步得到接收机位置与第一系统参考卫星到接收机的真实距离D1以及第二系统参考卫星到接收机的真实距离D4的线性关系方程:
Xu=(2A)-1(B1D1+B2D4+C) (6)
其中D1和D4此刻仍为未知量,由后续步骤获得;
步骤2.1.4:构造第一系统参考卫星到接收机的真实距离D1和第二系统参考卫星到接收机的真实距离D4的代数关系;
将第一系统参考卫星到接收机的真实距离D1和第二系统参考卫星到接收机的真实距离D4作为未知数,利用已有观测信息构造关于D1和D4的方程;
Xu∈R3,通过线性变化得到:
继而得到:
由此得到D1和D4的第一个关系式:
D1=c5D4+c6 (8)
其中:
由接收机到第一系统参考卫星和第二系统参考卫星的距离得到:
两式做差得到D1和D4的第二个关系式:
令 得:
步骤2.1.5获取接收机到参考卫星的真实距离,并进行结果的取舍;
将步骤2.1.4中得到的D1和D4的第一个关系式(8)代入第二个关系式(11)中,得到关于D4的一元二次方程:
其中: a2=(2c5c6+c5Y2A-1B1+Y2A-1B2),
a2=(2c5c6+c5Y2A-1B1+Y2A-1B2),
利用此一元二次方程得到D4的两个结果:
根据步骤2.1.4中D1和D4的一次关系式(8),由D4得到D1的两个结果,从而得到两组解,根据如下原则进行解的取舍:
(a)根据D1和D4的物理意义,应满足条件:D1>0,D4>0;
(b)根据矢量关系式:|||x||-y|||≤||x-y||,D1=||X1-Xu||,D4=||X4-Xu||,因此D1和D4还应满足条件:|D1-D4|≤||X1-X4||;
(c)δt1=tR-Tsat1,δt2=tR-Tsat2,其中,tR是接收机时钟,Tsat1是第一系统的系统时间,Tsat2是第二系统的系统时间,因此,δt1-δt2=Tsat2-Tsat1;
根据:ρ1=D1+c*δt1,ρ4=D4+c*δt2得到:|c*δt2-c*δt1|=|ρ4-D4-ρ1+D1|;由于第一系统和第二系统的时间偏差范围是已知的,且通常不大,假设其最大值为dtmax,则|ρ4-D4-ρ1+D1|≤c*dtmax;
经过上面三个条件的排除,将得到一组唯一的D1和D4;
步骤2.1.6:获得接收机位置向量和接收机相对两个系统的钟差;
将步骤2.1.5中得到的D1和D4的值代入到步骤2.1.3中得到的接收机位置Xu与D1和D4的线性关系方程(6)中,得到接收机位置Xu,同时利用ρ1=D1+c*δt1,ρ4=D4+c*δt2得到接收机相对两个系统的钟差δt1和δt2;
第二种情况:两个卫星导航系统一共有七颗或七颗以上可见卫星的情况;
步骤2.2.1:整理同时观测到的七颗或七颗以上卫星的位置及伪距测量值;
假设某时刻同时观测到N颗卫星,其中N1颗卫星属于第一系统,剩余N2颗卫星属于第二系统;N、N1和N2满足条件:N、N1和N2均为正整数,且N≥7,1≤N1<N,N2=N-N1;
由此得到N个观测方程:
其中:b1=c*δt1,b2=c*δt2;
步骤2.2.2:将未知数及其平方项作为新的未知数,构造新的线性矩阵方程;整理观测方程,通过取平方去掉开方项,并将方程中的未知数xu,yu,zu,b1,b2及其平方项 作为新的待求未知数,并令:f1=xu,f2=yu,f3=zu,f4=b1,f5=b2,
作为新的待求未知数,并令:f1=xu,f2=yu,f3=zu,f4=b1,f5=b2, 构造出新的线性矩阵方程:
EF=G (15)
其中:
步骤2.2.3:根据新的线性矩阵方程,得到接收机位置和接收机相对两个系统的钟差;
利用最小二乘法处理步骤2.2.2所得到的新的线性矩阵方程(15),从而得到F=(ETE)-1(ETG);然后根据f1=xu,f2=yu,f3=zu,f4=b1,f5=b2,得到接收机位置Xu=[xu yu zu]T、接收机相对第一系统的钟差δt1以及接收机相对第二系统的钟差δt2;
步骤3:输出定位结果;
将得到的接收机位置Xu=[xu yu zu]T、接收机相对第一系统的钟差δt1以及接收机相对第二系统的钟差δt2通过通讯接口输出给用户。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN2010101230178A CN101799552B (zh) | 2010-03-11 | 2010-03-11 | 双系统组合卫星导航接收机定位方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN2010101230178A CN101799552B (zh) | 2010-03-11 | 2010-03-11 | 双系统组合卫星导航接收机定位方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN101799552A CN101799552A (zh) | 2010-08-11 |
| CN101799552B true CN101799552B (zh) | 2012-11-21 |
Family
ID=42595305
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN2010101230178A Expired - Fee Related CN101799552B (zh) | 2010-03-11 | 2010-03-11 | 双系统组合卫星导航接收机定位方法 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN101799552B (zh) |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102176031B (zh) * | 2011-01-06 | 2013-02-20 | 中国科学院国家授时中心 | 双模导航系统中基于系统时差接收机完好性故障检测方法 |
| CN102721974B (zh) * | 2012-03-08 | 2013-08-14 | 北京航空航天大学 | 一种compass/gps双系统四星定位方法 |
| CN103364811A (zh) * | 2012-03-31 | 2013-10-23 | 迈实电子(上海)有限公司 | 卫星定位方法和接收机 |
| CN102749639A (zh) * | 2012-07-13 | 2012-10-24 | 北京航天控制仪器研究所 | 一种利用gps伪距信息进行空间定位的方法 |
| CN102981167B (zh) * | 2012-11-12 | 2014-08-20 | 哈尔滨工程大学 | 一种gps/北斗系统双模测时完好性监测方法 |
| CN103197326B (zh) * | 2013-03-25 | 2014-10-15 | 东南大学 | 一种多星座的单基准站接收机钟差估计方法 |
| CN104181561A (zh) * | 2013-05-24 | 2014-12-03 | 凹凸电子(武汉)有限公司 | 一种接收机和卫星定位及测速方法 |
| CN109444930B (zh) * | 2018-10-08 | 2020-11-10 | 闽江学院 | 一种基于分步加权最小二乘估计的单点定位的方法及装置 |
| CN109358348A (zh) * | 2018-11-08 | 2019-02-19 | 电子科技大学 | 一种多模卫星导航接收机直接定位解算方法 |
| CN111464397B (zh) * | 2020-04-08 | 2021-04-30 | 清华大学 | 一种双向距离和钟差测量的方法和系统 |
| CN112698368B (zh) * | 2020-12-03 | 2023-08-01 | 湖北三江航天险峰电子信息有限公司 | 一种导航接收机的导航信号解析方法及计算机存可读介质 |
| CN114966768B (zh) * | 2021-02-26 | 2025-11-18 | 阿里巴巴集团控股有限公司 | 定位方法及计算机程序产品 |
| CN115421171A (zh) * | 2022-08-26 | 2022-12-02 | 云南电网有限责任公司电力科学研究院 | 卫星初始轨道的确定方法及装置、设备及存储介质 |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101571581A (zh) * | 2009-06-15 | 2009-11-04 | 北京航空航天大学 | 全球导航卫星系统快速选星方法 |
-
2010
- 2010-03-11 CN CN2010101230178A patent/CN101799552B/zh not_active Expired - Fee Related
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101571581A (zh) * | 2009-06-15 | 2009-11-04 | 北京航空航天大学 | 全球导航卫星系统快速选星方法 |
Non-Patent Citations (1)
| Title |
|---|
| 张强等.组合卫星接收机中的选星算法.《北京航空航天大学学报》.2007,第33卷(第12期),第1424~1427页. * |
Also Published As
| Publication number | Publication date |
|---|---|
| CN101799552A (zh) | 2010-08-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN101799552B (zh) | 双系统组合卫星导航接收机定位方法 | |
| CN105676250B (zh) | 一种基于gnss的单历元三频模糊度解算方法 | |
| CN102269819B (zh) | 一种用于精密单点定位方法的估计方法 | |
| CN103336267B (zh) | 一种基于水声通信延迟的主从式多uuv协同定位方法 | |
| CN111538056B (zh) | 动态精密单点定位解算方法 | |
| CN104614741B (zh) | 一种不受glonass码频间偏差影响的实时精密卫星钟差估计方法 | |
| CN107656300B (zh) | 基于北斗/gps双模软件接收机的卫星/惯性超紧组合方法 | |
| CN106547002B (zh) | 一种提高rtk定位精度的选星方法 | |
| CN102608633B (zh) | 一种卫星定位伪距差分方法 | |
| CN106569241A (zh) | 一种基于gnss的单频高精度定位方法 | |
| CN109782313A (zh) | 地面精密单点定位数据处理方法 | |
| CN109613582B (zh) | 一种车载实时单频米级伪距定位方法 | |
| CN102590840A (zh) | 一种卫星定位载波相位差分方法 | |
| CN104457684A (zh) | 免固定设站点的全站仪三维变形监测方法 | |
| CN111399020A (zh) | 一种定向测姿系统及方法 | |
| CN103454665A (zh) | 一种双差gps/sins组合导航姿态测量方法 | |
| CN105093251A (zh) | Gnss接收机静态模式下的高精度相对定位方法 | |
| CN1996040B (zh) | 一种用于双星座卫星定位系统的选星方法 | |
| CN108732601A (zh) | 基于差分卫星导航的垂直返回运载器着陆段导航方法 | |
| CN105842710B (zh) | 一种基于vrs差分原理的低轨双星时差频差精密修正方法 | |
| CN103033827B (zh) | 一种卫星位置解算方法 | |
| CN102721974B (zh) | 一种compass/gps双系统四星定位方法 | |
| CN106154300B (zh) | 一种惯性/卫星超紧组合实现方法 | |
| CN105510936B (zh) | 星载gnss联合定轨方法及装置 | |
| CN109358348A (zh) | 一种多模卫星导航接收机直接定位解算方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20121121 Termination date: 20150311 |
|
| EXPY | Termination of patent right or utility model |