WO2024232166A1 - 加工状態推定装置及び加工状態推定方法 - Google Patents
加工状態推定装置及び加工状態推定方法 Download PDFInfo
- Publication number
- WO2024232166A1 WO2024232166A1 PCT/JP2024/010957 JP2024010957W WO2024232166A1 WO 2024232166 A1 WO2024232166 A1 WO 2024232166A1 JP 2024010957 W JP2024010957 W JP 2024010957W WO 2024232166 A1 WO2024232166 A1 WO 2024232166A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- data
- amount
- zone
- area
- machining
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images































Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23Q—DETAILS, COMPONENTS, OR ACCESSORIES FOR MACHINE TOOLS, e.g. ARRANGEMENTS FOR COPYING OR CONTROLLING; MACHINE TOOLS IN GENERAL CHARACTERISED BY THE CONSTRUCTION OF PARTICULAR DETAILS OR COMPONENTS; COMBINATIONS OR ASSOCIATIONS OF METAL-WORKING MACHINES, NOT DIRECTED TO A PARTICULAR RESULT
- B23Q17/00—Arrangements for observing, indicating or measuring on machine tools
- B23Q17/09—Arrangements for observing, indicating or measuring on machine tools for indicating or measuring cutting pressure or for determining cutting-tool condition, e.g. cutting ability, load on tool
- B23Q17/0952—Arrangements for observing, indicating or measuring on machine tools for indicating or measuring cutting pressure or for determining cutting-tool condition, e.g. cutting ability, load on tool during machining
- B23Q17/099—Arrangements for observing, indicating or measuring on machine tools for indicating or measuring cutting pressure or for determining cutting-tool condition, e.g. cutting ability, load on tool during machining by measuring features of the machined workpiece
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B21—MECHANICAL METAL-WORKING WITHOUT ESSENTIALLY REMOVING MATERIAL; PUNCHING METAL
- B21D—WORKING OR PROCESSING OF SHEET METAL OR METAL TUBES, RODS OR PROFILES WITHOUT ESSENTIALLY REMOVING MATERIAL; PUNCHING METAL
- B21D28/00—Shaping by press-cutting; Perforating
- B21D28/24—Perforating, i.e. punching holes
- B21D28/26—Perforating, i.e. punching holes in sheets or flat parts
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B21—MECHANICAL METAL-WORKING WITHOUT ESSENTIALLY REMOVING MATERIAL; PUNCHING METAL
- B21D—WORKING OR PROCESSING OF SHEET METAL OR METAL TUBES, RODS OR PROFILES WITHOUT ESSENTIALLY REMOVING MATERIAL; PUNCHING METAL
- B21D28/00—Shaping by press-cutting; Perforating
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23Q—DETAILS, COMPONENTS, OR ACCESSORIES FOR MACHINE TOOLS, e.g. ARRANGEMENTS FOR COPYING OR CONTROLLING; MACHINE TOOLS IN GENERAL CHARACTERISED BY THE CONSTRUCTION OF PARTICULAR DETAILS OR COMPONENTS; COMBINATIONS OR ASSOCIATIONS OF METAL-WORKING MACHINES, NOT DIRECTED TO A PARTICULAR RESULT
- B23Q17/00—Arrangements for observing, indicating or measuring on machine tools
- B23Q17/09—Arrangements for observing, indicating or measuring on machine tools for indicating or measuring cutting pressure or for determining cutting-tool condition, e.g. cutting ability, load on tool
- B23Q17/0952—Arrangements for observing, indicating or measuring on machine tools for indicating or measuring cutting pressure or for determining cutting-tool condition, e.g. cutting ability, load on tool during machining
- B23Q17/0966—Arrangements for observing, indicating or measuring on machine tools for indicating or measuring cutting pressure or for determining cutting-tool condition, e.g. cutting ability, load on tool during machining by measuring a force on parts of the machine other than a motor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B30—PRESSES
- B30B—PRESSES IN GENERAL
- B30B15/00—Details of, or accessories for, presses; Auxiliary measures in connection with pressing
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F11/00—Error detection; Error correction; Monitoring
- G06F11/22—Detection or location of defective computer hardware by testing during standby operation or during idle time, e.g. start-up testing
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23Q—DETAILS, COMPONENTS, OR ACCESSORIES FOR MACHINE TOOLS, e.g. ARRANGEMENTS FOR COPYING OR CONTROLLING; MACHINE TOOLS IN GENERAL CHARACTERISED BY THE CONSTRUCTION OF PARTICULAR DETAILS OR COMPONENTS; COMBINATIONS OR ASSOCIATIONS OF METAL-WORKING MACHINES, NOT DIRECTED TO A PARTICULAR RESULT
- B23Q2717/00—Arrangements for indicating or measuring
Definitions
- This disclosure relates to a machining state estimation device and a machining state estimation method.
- Patent Document 1 discloses a technique for obtaining a judgment value by combining the state quantities of normal equipment and abnormal equipment in equipment that repeats the same task in a relatively short cycle, such as a press.
- the judgment device in Patent Document 1 generates an alarm when the state quantity of the target equipment exceeds or falls below the judgment value.
- a machining state estimating device includes: A storage device and a processor,
- the storage device is Standard reference data corresponding to parameters defining the processing state of the press; storing area shape information;
- the zone shape information is information that specifies a zone length indicating a length of each of at least one zone that represents a punched contour by a press machine, and a recession amount indicating a dimensional change from a predetermined position of the punched contour in each zone,
- the processor Obtaining measurement data showing the measurement results of the processing load by the press machine; Generate comprehensive reference data for processing loads based on the reference data and the area shape information; determining a similarity measure that is an indication of the degree of similarity between the synthetic reference data and the measured data; Based on the determined similarity, the processing state in each zone is estimated.
- a machining state estimating method includes: A step of acquiring measurement data indicating a measurement result of a processing load applied by a press by a processor;
- the processor Standard reference data corresponding to parameters defining the processing state of the press;
- Zone shape information defining a zone length indicating the length of each of at least one zone representing a punched contour by a press machine and a recession amount indicating a dimensional change from a predetermined position of the punched contour in each zone; generating a comprehensive reference data on the processing load based on the determining a similarity measure, the similarity measure being an indication of the degree of similarity between the aggregate reference data and the measurement data;
- a processor estimating a processing state in each zone based on the determined similarity; Includes.
- FIG. 1 is a block diagram showing an example of the configuration of a machining state estimating device according to a first embodiment
- 2 is a schematic cross-sectional view showing a press machine to which the load sensor and the distance sensor shown in FIG. 1 are attached.
- 2 is a schematic graph showing an example of a waveform measured by the load sensor shown in FIG. 1 .
- 2 is a schematic diagram illustrating an overview of a machining state estimation process executed by the machining state estimation device of FIG. 1
- FIG. FIG. 3 is a schematic cross-sectional view for illustrating the area of the punching contour of the press of FIG. 2
- 6 is a schematic diagram showing a cross section of the punch taken along dashed line M1 in FIG. 5 .
- FIG. 6 is a schematic diagram showing a cross section of the punch taken along dashed line M2 in FIG. 5 .
- 1 is a graph illustrating an example of the relationship between the actual recession amount of the edge of the punch and the circumferential position of the punched contour.
- FIG. 8 is a diagram for explaining an example of a retraction amount parameter corresponding to the actual retraction amount of FIG. 7 .
- 2 is a table showing an example of status data shown in FIG. 1 .
- 11 is a graph for explaining waveform synthesis taking into account a retreat amount.
- 11 is a graph for explaining waveform synthesis taking into account a retreat amount.
- 10 is a flowchart illustrating an example of a procedure for estimating a machining state.
- 12 is a flowchart illustrating the normal state estimation process shown in FIG. 11 .
- 13 is a flowchart illustrating the workpiece thickness estimation process shown in FIG. 12 .
- 14 is a flowchart illustrating a reference waveform generating process corresponding to the state data of FIG. 13 .
- 14 is a flowchart illustrating a reference waveform generating process corresponding to the provisional state data of FIG. 13;
- 13 is a flowchart illustrating a punch wear amount estimation process shown in FIG. 12 .
- 13 is a flowchart illustrating the die wear amount estimation process shown in FIG. 12 .
- 13 is a flowchart illustrating the chipping estimation process shown in FIG. 12 .
- 12 is a flowchart illustrating a post-polishing state estimation process shown in FIG.
- FIG. 11 . 20 is a flowchart illustrating the post-polishing clearance estimation process shown in FIG. 19 .
- 12 is a flowchart illustrating a post-replacement state estimation process shown in FIG. 11 .
- 1 is a graph illustrating an example of the relationship between the actual recession amount of the edge of the punch and the circumferential position of the punched contour.
- FIG. 22B is a diagram for explaining an example of a retraction amount parameter corresponding to the actual retraction amount of FIG. 22A.
- FIG. 22B is a diagram for explaining another example of the retraction amount parameter corresponding to the actual retraction amount of FIG. 22A.
- 13 is a table showing an example of status data in the second embodiment.
- FIG. 24 is a diagram showing the distribution of the amount of setback in the second area of the state data shown in FIG. 23 .
- FIG. 24 is a diagram showing a plurality of regions obtained by subdividing the second region shown in FIG. 23 according to the amount of setback.
- 13 is a graph for explaining synthesis of waveforms taking into consideration the amount of retraction of a punch in the second embodiment.
- 13 is a graph for explaining synthesis of waveforms taking into consideration the amount of retraction of a punch in the second embodiment.
- FIG. 13 is a diagram showing a retraction amount represented by state data in a modified example of the second embodiment.
- FIG. 11 is a schematic cross-sectional view of a punch of a press machine according to a third embodiment.
- 28 is a cross-sectional view of the punch of FIG. 27 parallel to the ZX plane, viewed in the positive direction of the Y axis.
- 28 is a graph illustrating the relationship between the actual recession amount of the edge of the punch in FIG. 27 and the circumferential position of the punched contour. This data is obtained by subdividing the actual retraction amount in FIG. 13 is a table showing an example of status data in the third embodiment. 13 is a graph for explaining synthesis of waveforms taking into consideration the amount of retraction of a punch in the third embodiment. 13 is a graph for explaining synthesis of waveforms taking into consideration the amount of retraction of a punch in the third embodiment.
- the present inventors have conducted extensive research to accurately estimate the processing state of a press machine in press processing, particularly punching, and have come to the following findings.
- the "processing state” refers to at least one of the amount of wear of tools such as a punch or die, clearance, thickness of a workpiece, or amount of chipping.
- the load applied to the punch or workpiece during punching depends on the amount of punch wear, the amount of die wear, clearance, workpiece thickness, amount of chipping, etc.
- the amount of punch wear and the amount of die wear are examples of a punch wear parameter, which is an index showing the degree of wear of the punch, and a die wear parameter, which is an index showing the degree of wear of the die, respectively.
- the amount of tool wear such as the amount of punch wear and the amount of die wear, is expressed, for example, as the change in dimensions from the design value of the tool.
- the amount of tool wear may also be expressed as the amount of change, such as a change in shape, volume, or mass.
- the amount of tool wear may also be expressed as the radius of an arc when the wear is approximated as an arc.
- Clearance is the gap between the die and the punch.
- clearance is the gap between the die and the punch when a hole is punched into the workpiece.
- Clearance may be expressed as the ratio of the gap between the die and the punch to the thickness of the workpiece.
- Chipping refers to the loss of part of a tool due to a collision, fatigue, or the like.
- Chipping depth and chipping width represent the depth and width, respectively, of the tool that has been lost due to chipping.
- Chipping depth and chipping width are examples of parameters that represent the depth and width, respectively, of the lost portion from the punched contour of the tool in a normal state.
- Chipping depth and chipping width are expressed, for example, as the dimensional change that has receded due to chipping from the design value of the tool.
- chipping depth and chipping width may be expressed as a distribution of dimensional changes as described above.
- the chipping depth is an example of the "recession amount" in this disclosure.
- the recession amount is expressed, for example, as the dimensional change of the tool contour from a predetermined reference position.
- the load depends on these parameters, it is possible to estimate these parameters from the load waveform obtained during processing. For example, if it is possible to estimate whether chipping is occurring in the tool, and if so, the chipping width and depth, production can be stopped at the stage when a certain amount of chipping has been reached, for example an amount of chipping that causes defects in the product. This makes it possible to prevent situations such as the production of a large number of defective products, and increases productivity.
- chipping occurs during one machining cycle. Therefore, when chipping occurs, the amount of chipping changes significantly from the value in the previous machining cycle. For example, the chipping width and chipping depth are both 0 mm immediately before chipping occurs, whereas in machining immediately after chipping occurs, the chipping width and chipping depth are greater than 0 mm.
- the inventors have found that the accuracy of estimating the amount of chipping can be improved by performing the estimation under conditions in which parameters other than the amount of chipping, such as the amount of wear, do not change significantly from their values in the immediately preceding machining cycle.
- the inventors have found that the accuracy of estimating the amount of chipping can be improved by performing the estimation under conditions in which, when chipping occurs, the amount of chipping changes significantly from its value in the immediately preceding machining cycle.
- the present disclosure aims to provide a processing state estimation device and a processing state estimation method that estimate the processing state of a press machine with greater accuracy than conventional techniques.
- Configuration] 1 is a block diagram showing an example of the configuration of a machining state estimating device 100 according to a first embodiment of the present disclosure.
- the machining state estimating device 100 includes a CPU 1, a storage device 2, an input interface (I/F) 3, and an output interface (I/F) 4.
- the CPU 1 performs information processing to realize the functions of the machining state estimation device 100 described below. Such information processing is realized, for example, by the CPU 1 operating according to the instructions of a program 21 stored in the storage device 2.
- the CPU 1 is an example of a processor of the present disclosure.
- the processor is not limited to a CPU as long as it includes an arithmetic circuit that performs calculations for information processing.
- the processor may be configured with circuits such as an MPU or FPGA.
- the storage device 2 is a recording medium that records various information including data such as a waveform library 23 and state data 22 described below, and a program 21 required to realize the functions of the machining state estimation device 100.
- the storage device 2 is realized, for example, by a semiconductor storage device such as a flash memory or a solid state drive (SSD), a magnetic storage device such as a hard disk drive (HDD), or other recording media alone or in combination.
- the storage device 2 may include a volatile memory such as an SRAM or a DRAM.
- the input interface 3 is an interface circuit that connects the machining state estimation device 100 to an external device in order to input information such as the detection results by the load sensor 11 and the distance sensor 12 to the machining state estimation device 100.
- external devices are, for example, the load sensor 11, other information processing terminals, and other devices.
- the input interface 3 may be a communication circuit that performs data communication according to an existing wired communication standard or wireless communication standard.
- the output interface 4 is an interface circuit that connects the machining state estimation device 100 to an external output device in order to output information from the machining state estimation device 100.
- Such an output device is, for example, a display or another information processing terminal.
- the output interface 4 may be a communication circuit that performs data communication according to an existing wired communication standard or wireless communication standard.
- the input interface 3 and the output interface 4 may be realized by similar hardware.
- FIG. 2 is a schematic cross-sectional view showing a press machine 50 to which the load sensor 11 and distance sensor 12 shown in FIG. 1 are attached.
- FIG. 2 and some of the subsequent drawings show an X-axis, a Y-axis, and a Z-axis that are perpendicular to each other.
- the Z-axis indicates the vertical direction, and the upward direction is positive.
- the press 50 is an example of a processing machine that performs cyclic processing by repeating the same processing.
- the press 50 is equipped with a bolster 51 and a slide 52 that repeatedly performs a cyclic movement up and down from the top dead center to the bottom dead center relative to the bolster 51.
- a die backing plate 61 is attached on top of the bolster 51, and a die plate 62 is attached on top of the die backing plate 61.
- the die plate 62 holds a die 63.
- a punch backing plate 71 is attached to the bottom of the slide 52, and a punch plate 72 is attached to the bottom of the punch backing plate 71.
- the punch plate 72 grips the punch 73.
- the press 50 further includes a stripper plate 74.
- the stripper plate 74 is attached to a fastener such as a bolt and to the punch plate 72 or punch backing plate 71 via positioning guides such as posts (not shown).
- the stripper plate 74 is biased downward by, for example, a compression spring, and has the function of guiding the position of the punch 73 to be constant, as well as the function of removing material adhering to the punch 73 after punching the workpiece 80, and/or the function of fixing the workpiece 80 when punching the workpiece 80.
- the load sensor 11 is installed, for example, between the punch 73 and the punch backing plate 71.
- the load sensor 11 is, for example, a piezoelectric force sensor or an electric force sensor such as a strain gauge type, and measures the load applied to the punch 73 when the punch 73 punches the workpiece 80.
- the distance sensor 12 is installed, for example, on the die backing plate 61.
- the distance sensor 12 is, for example, an eddy current gap sensor or a laser displacement meter.
- the distance sensor 12 measures, for example, the distance in the Z direction from the distance sensor 12 to the punch plate 72.
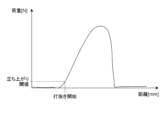
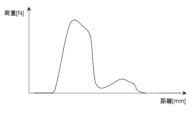
- FIG. 3 is a schematic graph showing an example of a waveform measured by the load sensor 11.
- the graph in FIG. 3 shows a measured waveform when no chipping occurs.
- the horizontal axis of the graph in FIG. 3 represents the distance that the punch 73 has advanced from the initial state in the negative direction of the Z axis, and the vertical axis represents the load.
- the graph in FIG. 3 shows a waveform of a curve with a high intermediate portion, in which a load begins to be applied to the workpiece 80, punch 73, and load sensor 11 from the point when the punch 73 descends and contacts the workpiece 80 during punching, and the load suddenly decreases to almost zero after the workpiece 80 is punched.
- the punching start timing of the punching process can be measured, for example, based on the distance at which the load exceeds a rising threshold in the measured waveform. Such a rising threshold may be determined as an absolute value or as a percentage of the peak value of the load.
- Figure 4 is a schematic diagram illustrating an example of the outline of the machining state estimation process executed by the machining state estimation device 100 of Figure 1.
- the CPU 1 obtains unit waveforms (hereinafter sometimes referred to as "standard reference data") per unit length of the punched contour of the press machine 50 from the waveform library 23, and generates area waveforms (area data) corresponding to the two areas A1 and A2, respectively.
- the CPU 1 synthesizes the area waveforms taking into account the respective retreat amounts to generate a reference waveform (hereinafter sometimes referred to as “total reference data"), and compares the measured waveform with the reference waveform.
- the unit waveform is associated with a parameter indicating at least one of the tool wear amount, clearance, or workpiece thickness, so that the parameters of each of the areas A1 and A2 can be estimated by searching for a reference waveform that matches closely with the measured waveform.
- FIG. 5 is a schematic cross-sectional view for explaining areas A1 and A2 of the punching contour of the press 50.
- the cross-sectional view of FIG. 5 only shows the punch 73 and the die 63.
- the cross-sectional view of FIG. 5 shows a state in which chipping has occurred in the punch 73.
- the portion that has been lost due to chipping is shown as area 73C.
- the designed edges of the punching contour of the punch 73 all have the same value with respect to the Z axis. In other words, the workpiece is punched at the same Z-axis height in terms of design.
- chipping occurs in the punch 73
- the present disclosure is not limited to this, and chipping can also occur in the die 63, or in both the punch 73 and the die 63.
- the punching contour is the contour of the portion of the workpiece 80 that is punched by the punching process using the press machine 50.
- the shapes of the punch 73 and the die 63 are designed to achieve the desired punching contour.
- the punching contour may be the design value of the contour of the punch 73 as viewed from the punching direction, or the design value of the contour of the opening of the die 63 as viewed from the punching direction.
- Areas A1 and A2 of the punched contour are obtained by dividing the punched contour. Where the punched contour is divided is determined by the width of the chipping.
- the rounded rectangular punched contour is divided into a first area A1 and a second area A2 based on the chipping region 73C.
- the first area A1 corresponds to the part of the punched contour where no chipping has occurred.
- the second area A2 corresponds to the part of the punched contour where chipping has occurred.
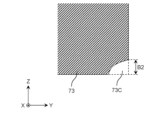
- FIG. 6A is a schematic diagram showing a cross section of punch 73 taken along dashed line M1 in FIG. 5.
- FIG. 6B is a schematic diagram showing a cross section of punch 73 taken along dashed line M2 in FIG. 5.
- FIG. 6A shows a cross section of a portion where no chipping has occurred
- FIG. 6B shows a cross section of a portion where chipping has occurred.
- the cross sections are parallel to the YZ plane.
- the retraction amount B1 of the portion of punch 73 where no chipping has occurred is 0 mm.
- the retraction amount B2 of the portion of punch 73 where chipping has occurred is not 0 mm, but is an amount corresponding to the depth of chipping region 73C.
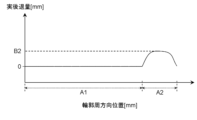
- Figure 7 is a graph illustrating the relationship between the actual amount of recession (actual recession amount) of the edge of punch 73 and the circumferential position of the punched contour.
- the actual recession amount is 0 mm at the position corresponding to the first area A1 where no chipping occurs, and the actual recession amount is greater than 0 mm at the position corresponding to the second area A2 where chipping occurs.
- the actual recession amount is not constant, but has a distribution with respect to position.
- FIG. 8 is a diagram for explaining an example of a retraction amount parameter corresponding to the actual retraction amount in FIG. 7.
- the retraction amount parameter can be obtained by modeling the actual retraction amount in FIG. 7.
- the retraction amount in each area, is represented as a single parameter that is a representative value of the actual retraction amount.
- the retraction amount in the second area A2 is represented by a representative value B2 of the actual retraction amount.
- the representative value is, for example, the maximum value.
- FIG. 9 is a table showing an example of state data 22.
- the state data 22 includes contour parameters that define information about the punching contour, tool state parameters that define the state of the tool, and work state parameters that define the state of the work.
- the tool state parameters and work state parameters are sometimes collectively referred to as "state parameters.”
- the contour parameters include the area length along the punching contour and the setback amount.
- the tool state parameters include the amount of punch wear, the amount of die wear, and the clearance.
- the work state parameter is the work thickness.
- the contour parameters shown in FIG. 9 are an example of "area shape information" of the present disclosure.
- the area length and setback amount in the first area A1 are represented as W1 and B1, respectively, and the area length and setback amount in the second area A2 are represented as W2 and B2, respectively.
- the area length of the contour parameter indicates the length of the punched outline in each area.
- the setback amount of the contour parameter indicates the setback amount (chipping depth) of each area. Since the setback amounts B1 and B2 and the area lengths W1 and W2 are parameters that characterize the shape of the chipping region 73C, these are sometimes referred to as “chipping parameters" or "setback amount parameters" in this specification.
- the punch wear amount, die wear amount, and clearance in the first area A1 are represented as P1, D1, and C1, respectively
- the punch wear amount, die wear amount, and clearance in the second area A2 are represented as P2, D2, and C2, respectively.
- the workpiece thickness T is constant across the entire region.
- this embodiment is not limited to this, and the workpiece thickness, like other parameters, may take different values for each region.
- punch wear amounts P1 and P2 can be set to any of the candidate values of 0 ⁇ m, 2 ⁇ m, 4 ⁇ m, 6 ⁇ m, 8 ⁇ m, 10 ⁇ m, and 12 ⁇ m.
- die wear amounts D1 and D2 can be set to any of the candidate values of 0 ⁇ m, 2 ⁇ m, 4 ⁇ m, 6 ⁇ m, 8 ⁇ m, 10 ⁇ m, and 12 ⁇ m.
- clearances C1 and C2 can be set to any of the candidate values of 3 ⁇ m, 4 ⁇ m, 5 ⁇ m, 6 ⁇ m, and 7 ⁇ m.
- work thickness T can be set to any of the candidate values of 46 ⁇ m, 48 ⁇ m, 50 ⁇ m, 52 ⁇ m, and 54 ⁇ m.
- candidate values of punch wear amount, die wear amount, clearance, and work thickness are not limited to these, and the number of candidate values is not limited to the above number.
- the waveform library 23 is a four-dimensional table in which unit waveforms corresponding to the arrays of punch wear amount, die wear amount, clearance, and workpiece thickness are registered.
- unit waveforms per unit length of the punching contour corresponding to all combinations of punch wear amount, die wear amount, clearance, and work thickness are registered in advance.
- the unit length is a predetermined unit length, for example, 1 mm.
- the unit waveform is a waveform that represents the relationship between distance and load, similar to the measured waveform in Figure 3.
- the unit waveform can be obtained, for example, by actually measuring the punching load or by multiplying the waveform obtained by simulation by the ratio of the unit length to the total length of the punching contour. For example, if the unit length is 1 [mm] and the total length of the punching contour is L [mm], the unit waveform can be obtained by actually measuring the punching load or by multiplying the waveform obtained by simulation by 1/L.
- the ratios of the area lengths W1 and W2 are adjusted in 1 mm steps, under the condition that the sum of them coincides with the total area length W, which is the total length of the punching contour.
- the retraction amount B2 can be set in 1 mm steps in the range from 0 mm to 5 mm.
- the step width of the area length, and the range and step width of the retraction amount are not limited to these.
- CPU 1 obtains unit waveforms corresponding to the combination of punch wear amount, die wear amount, clearance, and work thickness for each zone from waveform library 23. Next, CPU 1 generates a zone waveform for each zone by multiplying each unit waveform by the zone length. As shown in Figure 9, CPU 1 generates a reference waveform that indicates the load over the entire length of the punching contour by combining two zone waveforms while taking into account the retreat amount of each zone.
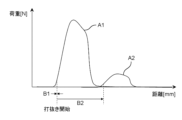
- FIGS. 10A and 10B are graphs for explaining the synthesis of waveforms taking into account the amount of retreat of punch 73. Two waveforms corresponding to areas A1 and A2, respectively, are shown in FIG. 10A.
- the waveform corresponding to each zone is a waveform obtained by adding the amount of retraction to the distance compared to the waveform when the amount of retraction is not taken into account (the zone waveform described above).
- the waveform corresponding to each zone is a waveform obtained by shifting the zone waveform in the distance direction by the amount of retraction. The reason why the waveform shifts in this way when chipping is present is that the point at which the retracted (missing) part of the tool collides with the workpiece is delayed from the point at which the non-chipped part of the tool collides with the workpiece.
- the waveform corresponding to the first area A1 is the area waveform when the amount of retreat is not taken into account, since the amount of retreat B1 is 0.
- the waveform corresponding to the second area A2 is a waveform obtained by shifting the area waveform when the amount of retreat is not taken into account in the distance direction by the amount of retreat B2.
- the waveform in Figure 10B is a composite waveform obtained by adding together the two waveforms in Figure 10A.
- the CPU 1 searches for a reference waveform that has the highest degree of match with the measured waveform, and estimates the combination of parameters (see FIG. 9) corresponding to the unit waveform of each area that is the basis of the searched reference waveform as an estimated parameter set that represents the machining state of that area.
- FIG. 11 is a flowchart illustrating a procedure of a machining state estimation process executed by the CPU 1 of the machining state estimation device 100 of FIG.
- the CPU 1 acquires from the load sensor 11 a measurement waveform that indicates the measurement result of the load applied to the load sensor 11 during press processing by the press machine 50 (S1).
- the CPU 1 acquires the measurement waveforms in time series for each processing cycle.
- the CPU 1 acquires state data 22 indicating the estimated parameter set, which is the result of the previous estimation (S2).
- CPU1 determines whether a predetermined period of time has elapsed since the tool was replaced (S3). For example, CPU1 determines whether a predetermined period of time has elapsed since it received a tool replacement signal indicating that a tool was replaced. CPU1 may determine that a predetermined period of time has elapsed if press processing has been performed a predetermined number of times or more since it received the tool replacement signal. Such a tool replacement signal is transmitted to CPU1, for example, by a user pressing a tool replacement completion button provided on the press machine 50, the user interface of the machining state estimation device 100, etc.
- the CPU 1 determines whether or not a predetermined period of time has elapsed since the tool was ground (S4). For example, the CPU 1 determines whether or not a predetermined period of time has elapsed since it received a die grinding signal indicating that the die has been ground and/or a punch grinding signal indicating that the punch has been ground. The CPU 1 may determine that a predetermined period of time has elapsed if press processing has been performed a predetermined number of times or more since it received the die grinding signal and/or the punch grinding signal. Such a signal is sent to the CPU 1, for example, when the user presses a die grinding completion button and/or a punch grinding completion button provided on the user interface of the press machine 50, the processing state estimation device 100, etc.
- the CPU 1 executes a first state estimation process (hereinafter referred to as the "normal state estimation process") S5. Details of the normal state estimation process S5 will be described later.
- step S4 If it is determined in step S4 that the predetermined period has not elapsed since the tool was ground (No in S4), the CPU 1 executes a second state estimation process S6 (hereinafter referred to as "post-grinding state estimation process"). Details of the post-grinding state estimation process S6 will be described later.
- step S3 If it is determined in step S3 that the predetermined period has not elapsed since the tool was replaced (No in S3), the CPU 1 executes a third state estimation process S7 (hereinafter referred to as the "post-replacement state estimation process"). Details of the post-replacement state estimation process S7 will be described later.
- FIG. 12 is a flowchart illustrating the normal state estimation process S5 shown in FIG.
- the CPU 1 first calculates the degree of agreement between the measurement waveform acquired in the current processing cycle and the measurement waveform acquired in the previous processing cycle (S5A).
- the degree of agreement is an index showing the degree of agreement between two waveforms.
- the degree of agreement is, for example, the cosine similarity, Euclidean distance, or Manhattan distance between two waveforms during the punching period.
- the CPU 1 may calculate a loss, which is an index showing the degree of mismatch between two waveforms.
- Both the degree of agreement and the degree of mismatch are examples of "similarity,” which is an index showing the degree of similarity between two waveforms.
- the CPU 1 determines whether the calculated degree of match exceeds a preset threshold value (S5B).
- the waveform changes before and after chipping occur tend to differ from the waveform changes caused by wear, which cause small changes. Therefore, the CPU 1 can estimate whether new chipping has occurred by using the degree of agreement between the measured waveform obtained in the previous machining cycle and the measured waveform obtained in the machining cycle before that.
- step S5B If the CPU 1 determines in step S5B that the degree of match exceeds the threshold (Yes in S5B), it executes chipping estimation processing S53. Details of chipping estimation processing S53 will be described later.
- step S5B determines in step S5B that the degree of agreement does not exceed the threshold value (No in S5B)
- Steps S50, S51, and S52 are performed in this order because, generally, the workpiece thickness changes each time the workpiece is replaced, whereas punch wear and die wear change more slowly than the workpiece thickness, and therefore the workpiece thickness is estimated with priority over punch wear and die wear. Also, punch wear amount estimation process S51 is performed before die wear amount estimation process S52 because punch wear progresses faster than die wear, and therefore the punch wear amount is estimated with priority over the die wear amount.
- the clearance value in the state data 22 is fixed to the value estimated in the previous processing state estimation processing.
- the clearance is fixed because in normal state estimation processing S5, where a predetermined period of time has passed since the tool was replaced or polished, the clearance does not change at all or almost does not change even if press processing is repeated.
- chipping estimation process S53 is performed only when the possibility of chipping occurring is high, but the present disclosure is not limited to this.
- the CPU 1 may sequentially execute chipping estimation process S53, workpiece thickness estimation process S50, punch wear amount estimation process S51, and die wear amount estimation process S52, unlike FIG. 12.
- Fig. 13 is a flow chart illustrating the workpiece thickness estimation process S50 shown in Fig. 12.
- the CPU 1 first executes a reference waveform generation process S501 corresponding to the state data.
- FIG. 14 is a flow chart illustrating the reference waveform generation process S501 corresponding to the state data of FIG. 13.
- the CPU 1 obtains unit waveforms corresponding to the parameter values of the state data 22 for each area from the waveform library 23 (S5010).
- CPU 1 generates an area waveform for each area by multiplying each unit waveform by the area length (S5011).
- CPU 1 shifts the area waveform for each area in the distance direction by the amount of retreat (S5012).
- the CPU 1 generates a reference waveform that indicates the load over the entire length of the punching contour by synthesizing all the area waveforms (S5013). Synthesizing multiple waveforms means, for example, taking the sum of multiple waveforms.
- the CPU 1 calculates the degree of match between the reference waveform corresponding to the state data 22 generated in step S501 and the measurement waveform acquired in step S1 (S502).
- the degree of match in step S502 is calculated in the same manner as the degree of match in step S5A, for example.
- CPU1 judges whether the loop processing in the workpiece thickness estimation processing S50 has converged (completed) (S503).
- Convergence means that all candidate values that can be selected based on a predetermined selection rule have been set in all areas of the provisional state data.
- CPU1 judges whether all candidate values for the workpiece thickness have been set as the workpiece thickness in areas A1 and A2 of the provisional state data, as a convergence judgment.
- step S503 determines in step S503 that the loop processing in the workpiece thickness estimation process S50 has not converged (No in S503), it executes step S504, and if it determines that the loop processing has converged (Yes in S503), it ends the workpiece thickness estimation process S50.
- step S504 the CPU 1 prepares provisional state data by modifying the state data 22 for each area so that the workpiece thickness is set to one of the candidate values for the workpiece thickness (S504).
- the other parameters of the provisional state data namely the punch wear amount, the die wear amount, and the clearance, are fixed to the previously estimated punch wear amount, the die wear amount, and the clearance, respectively.
- FIG. 15 is a flow chart illustrating the reference waveform generation process S505 corresponding to the provisional state data of FIG. 13.
- the reference waveform generation process S505 corresponding to the provisional state data includes step S5050 instead of step S5010.
- the CPU 1 first obtains unit waveforms corresponding to the parameter values of the provisional state data for each area from the waveform library 23 (S5050).
- the subsequent steps S5011 to S5013 are the same as the reference waveform generation process S501 corresponding to the state data in FIG. 14.
- the CPU 1 calculates the degree of match between the reference waveform corresponding to the provisional state data generated in step S505 and the measurement waveform acquired in step S1 (S506).
- the CPU 1 determines whether the degree of match calculated in step S504 has increased compared to the degree of match calculated in the most recent step S502 (S507). If the CPU 1 determines that the degree of match has increased (Yes in S507), it proceeds to step S508, and if the CPU 1 determines that the degree of match has not increased (No in S507), it returns to step S503.
- step S508 the CPU 1 updates the state data 22 so that the provisional state data prepared in step S504 becomes the state data 22 (S508). After completing step S508, the CPU 1 returns to step S501.
- the CPU 1 determines in step S503 that the loop processing in the workpiece thickness estimation processing S50 has converged (Yes in S503), it ends the workpiece thickness estimation processing S50 and executes the punch wear amount estimation processing S51 (see FIG. 12).
- the CPU 1 ends the workpiece thickness estimation processing S50 when it has completed all of the loops that set the workpiece thickness in areas A1 and A2 of the provisional state data to 46 ⁇ m, 48 ⁇ m, 50 ⁇ m, 52 ⁇ m, and 54 ⁇ m.
- Fig. 16 is a flow chart illustrating the punch wear amount estimation process S51 shown in Fig. 12.
- the CPU 1 first executes a reference waveform generation process S501 (see Fig. 14) corresponding to the status data.
- the CPU 1 calculates the degree of agreement between the reference waveform corresponding to the status data 22 generated in step S501 and the measured waveform acquired in step S1 (S512).
- the CPU 1 determines whether the loop process in the punch wear amount estimation process S51 has converged (S513). That is, the CPU 1 determines whether all candidate values for the punch wear amount that are greater than the punch wear amount estimated in the previous processing state estimation process have been set in each area of the provisional state data.
- step S513 determines in step S513 that the loop processing in the punch wear amount estimation process S51 has not converged (No in S513), it executes step S514, and if it determines that the loop processing has converged (Yes in S513), it ends the punch wear amount estimation process S51.
- step S514 the CPU 1 prepares provisional state data by modifying the state data 22 for each area so that the punch wear amount is set to a value greater than the previously estimated punch wear amount (S514).
- the previously estimated punch wear amount is 4 ⁇ m
- the CPU 1 sets the punch wear amount in the provisional state data to one of 6 ⁇ m, 8 ⁇ m, 10 ⁇ m, or 12 ⁇ m.
- CPU1 executes a reference waveform generation process S505 corresponding to the provisional state data.
- CPU1 calculates the degree of match between the reference waveform corresponding to the provisional state data generated in step S505 and the measurement waveform acquired in step S1 (S516).
- the CPU 1 determines whether the degree of match calculated in step S516 has increased compared to the degree of match calculated in the most recent step S512 (S517). If the CPU 1 determines that the degree of match has increased (Yes in S517), it proceeds to step S518, and if the CPU 1 determines that the degree of match has not increased (No in S517), it returns to step S513.
- step S5108 the CPU 1 updates the state data 22 so that the provisional state data prepared in step S514 becomes the state data 22 (S518). After completing step S518, the CPU 1 returns to step S501.
- Fig. 17 is a flow chart illustrating the die wear amount estimation process S52 shown in Fig. 12.
- the CPU 1 first executes a reference waveform generation process S501 (see Fig. 14) corresponding to the state data.
- the CPU 1 calculates the degree of agreement between the reference waveform corresponding to the state data 22 generated in step S501 and the measured waveform acquired in step S1 (S522).
- the CPU 1 determines whether the loop process in the die wear amount estimation process S52 has converged (S523). That is, the CPU 1 determines whether all candidate values for the die wear amount that are greater than the die wear amount estimated in the previous processing state estimation process have been set in each area of the provisional state data.
- the CPU 1 determines that the loop processing in the die wear amount estimation process S52 has not converged (No in S523), it executes step S524, and if it determines that the loop processing has converged (Yes in S523), it ends the die wear amount estimation process S52.
- step S524 the CPU 1 prepares provisional state data by modifying the state data 22 for each area so that the die wear amount is set to a value greater than the previously estimated die wear amount (S524).
- CPU1 executes a reference waveform generation process S505 corresponding to the provisional state data.
- CPU1 calculates the degree of match between the reference waveform corresponding to the provisional state data generated in step S505 and the measurement waveform acquired in step S1 (S526).
- the CPU 1 determines whether the degree of match calculated in step S526 has increased compared to the degree of match calculated in the most recent step S522 (S527). If the CPU 1 determines that the degree of match has increased (Yes in S527), it proceeds to step S528, and if the CPU 1 determines that the degree of match has not increased (No in S527), it returns to step S523.
- step S528 the CPU 1 updates the state data 22 so that the provisional state data prepared in step S524 becomes the state data 22 (S528). After completing step S528, the CPU 1 returns to step S501.
- the CPU 1 estimates state data 22.
- the punch wear amounts P1 and P2 die wear amounts D1 and D2, clearances C1 and C2, and workpiece thickness T shown in FIG. 9 are identified.
- the punch wear amount P1, die wear amount D1, clearance C1, and workpiece thickness T are identified. In this way, the machining state estimation device 100 can estimate parameters for each area.
- Fig. 18 is a flowchart illustrating the chipping estimation process S53 shown in Fig. 12.
- the CPU 1 executes a reference waveform generation process S501 (see FIG. 14) corresponding to the state data.
- the CPU 1 calculates the degree of agreement between the reference waveform corresponding to the state data 22 generated in step S501 and the measurement waveform acquired in step S1 (S532).
- CPU1 judges whether the loop processing in the chipping estimation process S53 has converged (S533). For example, CPU1 performs the following two judgments. That is, first, CPU1 judges whether all candidate values for the area length W2 of the second area A2 that are greater than the area length W2 estimated in the previous processing state estimation process have been set in the second area A2 of the provisional state data. Second, CPU1 judges whether all candidate values for the retraction amount B2 of the second area A2 that are greater than the retraction amount B2 estimated in the previous processing state estimation process have been set in the second area A2 of the provisional state data.
- step S533 If the CPU 1 determines in step S533 that the loop processing in the chipping estimation process S53 has not converged (No in S533), it executes step S534, and if it determines that the loop processing has converged (Yes in S533), it ends the chipping estimation process S53.
- step S534 the CPU 1 prepares provisional state data by modifying the state data 22 so that the area length W2 and the setback amount B2 are set to either of the candidate values greater than the previously estimated area length W2 and setback amount B2, respectively (S534).
- the area length W2 is adjusted so that the sum of the area lengths W1 and W2 is equal to the total area length W of the punching contour.
- CPU 1 sets the current area length W2 to one of the candidate values between 3 mm and the total area length W. Also, if the previously estimated retraction amount B2 was 1 mm, CPU 1 sets the current retraction amount B2 to one of the candidate values between 2 mm and 5 mm.
- the CPU 1 sets at least one of the punch wear amount P2 and the die wear amount D2 corresponding to the area A2 to an initial value of 0 ⁇ m (S535). If new chipping occurs, the wear that was in the chipping area will also be lost, resulting in a state of no wear or a state where wear is not noticeable, so at least one of the punch wear amount P2 and the die wear amount D2 is returned to the initial state.
- CPU1 executes a reference waveform generation process S505 corresponding to the provisional state data.
- CPU1 calculates the degree of match between the reference waveform corresponding to the provisional state data generated in step S505 and the measurement waveform acquired in step S1 (S536).
- the CPU 1 determines whether the degree of match calculated in step S536 has increased compared to the degree of match calculated in the most recent step S532 (S537). If the CPU 1 determines that the degree of match has increased (Yes in S537), it proceeds to step S538, and if the CPU 1 determines that the degree of match has not increased (No in S537), it returns to step S533.
- step S538 the CPU 1 updates the state data 22 so that the provisional state data prepared in step S534 becomes the state data 22 (S538). After completing step S538, the CPU 1 returns to step S501.
- the CPU 1 estimates state data 22.
- the area lengths W1, W2, punch wear amounts P1, P2, die wear amounts D1, D2, clearances C1, C2, retraction amounts B1, B2, and workpiece thickness T shown in FIG. 9 are specified.
- the area length W2, punch wear amount P2, die wear amount D2, clearance C2, retraction amount B2, and workpiece thickness T are specified.
- the machining state estimation device 100 can estimate parameters for each area.
- the retreat amount B2 of the state data 22 updated in the chipping estimation process S53 indicates the presence or absence and the degree of chipping.
- Fig. 19 is a flow chart illustrating the process flow of the post-grinding state estimation process S6 shown in Fig. 11.
- the CPU 1 sets the area length W1 to the total area length W, the area length W2 to 0 mm, and the recession amounts B1 and B2 to their initial values (S60).
- the process that is executed differs depending on whether the tool that was ground is a punch, a die, or both.
- CPU 1 determines whether or not both the punch and the die have been ground (S61). In the above example, CPU 1 determines whether or not it has received both a die grinding signal indicating that the die has been ground and a punch grinding signal indicating that the punch has been ground. If CPU 1 determines that both the punch and the die have been ground (Yes in S61), it proceeds to step S62; otherwise (No in S61), it proceeds to step S64.
- step S64 CPU 1 determines whether the punch has been ground. If CPU 1 determines that the punch has been ground (Yes in S64), it proceeds to step S65; otherwise (No in S64), it proceeds to step S66. That is, if both the punch and the die have been ground, step S62 is executed; if only the punch has been ground, step S65 is executed; if only the die has been ground, step S66 is executed.
- step S62 CPU 1 sets the punch wear amount and die wear amount to initial values of 0 ⁇ m. After fixing the punch wear amount and die wear amount in this manner, CPU 1 executes a process for estimating the clearance (hereinafter referred to as "post-grinding clearance estimation process") S63 and a workpiece thickness estimation process S50. As an alternative to the example of FIG. 19, post-grinding clearance estimation process S63 may be executed after workpiece thickness estimation process S50. Details of post-grinding clearance estimation process S63 will be described later.
- step S64 If it is determined in step S64 that the punch has been ground (Yes in S64), the CPU 1 sets the punch wear amount to an initial value of 0 ⁇ m (S65), and then executes post-grinding clearance estimation process S63, workpiece thickness estimation process S50, and die wear amount estimation process S52.
- post-grinding clearance estimation process S63 may be executed after workpiece thickness estimation process S50 and die wear amount estimation process S52.
- step S64 If it is determined in step S64 that the punch has not been ground (No in S64), the CPU 1 sets the die wear amount to an initial value of 0 ⁇ m (S66), and then executes post-grinding clearance estimation process S63, workpiece thickness estimation process S50, and punch wear amount estimation process S51.
- post-grinding clearance estimation process S63 may be executed after workpiece thickness estimation process S50 and punch wear amount estimation process S51.
- FIG. 20 is a flow chart illustrating the post-polishing clearance estimation process S63 shown in FIG. 19.
- the CPU 1 first executes a reference waveform generation process S501 (see FIG. 14) corresponding to the state data.
- the CPU 1 calculates the degree of agreement between the reference waveform corresponding to the state data 22 generated in step S501 and the measurement waveform acquired in step S1 (S632).
- the CPU 1 determines whether the loop process in the post-grinding clearance estimation process S63 has converged (S633). That is, the CPU 1 determines whether all of the candidate clearance values within a predetermined range from the clearance estimated in the previous processing state estimation process have been set in the provisional state data.
- the CPU 1 determines that the loop processing in the post-grinding clearance estimation processing S63 has not converged (No in S633), it executes step S634, and if it determines that the loop processing has converged (Yes in S633), it ends the post-grinding clearance estimation processing S63.
- step S634 CPU 1 prepares provisional state data by modifying state data 22 so as to set the clearance to a value within a predetermined range from the previously estimated clearance (S634). For example, if the previously estimated clearance was 5 ⁇ m, CPU 1 sets the clearance in the provisional state data to a value within the range of 5 ⁇ m ⁇ 1 ⁇ m, i.e., 4 ⁇ m or 6 ⁇ m.
- the reason why the range of clearance changes is limited to within the predetermined range is because it has been found that, unlike when the tool is replaced, the clearance hardly changes even when the tool is polished.
- CPU1 executes a reference waveform generation process S505 corresponding to the provisional state data.
- CPU1 calculates the degree of match between the reference waveform corresponding to the provisional state data generated in step S505 and the measurement waveform acquired in step S1 (S636).
- the CPU 1 determines whether the degree of match calculated in step S636 has increased compared to the degree of match calculated in the most recent step S632 (S637). If the CPU 1 determines that the degree of match has increased (Yes in S637), it proceeds to step S638, and if the CPU 1 determines that the degree of match has not increased (No in S637), it returns to step S633.
- step S638 the CPU 1 updates the state data 22 so that the provisional state data prepared in step S634 becomes the state data 22 (S638). After completing step S638, the CPU 1 returns to step S501.
- FIG. 21 is a flowchart illustrating the post-replacement state estimation process S7 shown in FIG.
- the CPU 1 first sets the area length W1 to the total area length W, the area length W2 to 0, and the setback amounts B1 and B2 to their initial values (S60), in the above example.
- the initial values of the setback amounts B1 and B2 are both 0 mm.
- the CPU 1 sets the punch wear amount and die wear amount to an initial value of 0 ⁇ m (S62). Next, the CPU 1 executes the workpiece thickness estimation process S50.
- the CPU 1 executes a reference waveform generation process S501 (see FIG. 14) corresponding to the state data.
- the CPU 1 calculates the degree of match between the reference waveform corresponding to the state data 22 generated in step S501 and the measurement waveform acquired in step S1 (S72).
- the CPU 1 determines whether the loop process in the post-replacement state estimation process S7 has converged (S73). In other words, the CPU 1 determines whether all candidate clearance values have been set in the provisional state data.
- the CPU 1 determines that the loop processing in the post-replacement state estimation processing S7 has not converged (No in S73), it executes step S74, and if it determines that the loop processing has converged (Yes in S73), it ends the post-replacement state estimation processing S7.
- step S74 the CPU 1 prepares provisional state data by modifying the state data 22 so that the clearance is set to one of the clearance candidate values (S74).
- CPU1 executes a reference waveform generation process S505 corresponding to the provisional state data.
- CPU1 calculates the degree of match between the reference waveform corresponding to the provisional state data generated in step S505 and the measurement waveform acquired in step S1 (S76).
- the CPU 1 determines whether the degree of match calculated in step S76 has increased compared to the degree of match calculated in the most recent step S72 (S77). If the CPU 1 determines that the degree of match has increased (Yes in S77), it proceeds to step S78, and if the CPU 1 determines that the degree of match has not increased (No in S77), it returns to step S73.
- step S78 the CPU 1 updates the state data 22 so that the provisional state data prepared in step S74 becomes the state data 22 (S78). After completing step S78, the CPU 1 returns to step S501.
- the machining state estimation device 100 may notify the user when the width and/or depth of chipping in the state data 22, which is the estimation result, is not within a predetermined range. Alternatively, or in addition, the machining state estimation device 100 may notify the user when the amount of punch wear or the amount of die wear is equal to or greater than a predetermined threshold and/or when the clearance is not within a predetermined range. This allows the user to perform maintenance such as replacing the tool. Such notification is performed, for example, by lighting or flashing an LED in red, generating a warning sound from a speaker, displaying the state data 22 on a display, etc.
- the machining state estimation device 100 includes a storage device 2 and a CPU 1, which is an example of a processor.
- the storage device 2 stores unit waveforms, which are an example of reference data corresponding to state parameters that define the machining state of the press machine 50, and contour parameters, which are an example of area shape information.
- the contour parameters define area lengths that indicate the lengths of the areas A1 and A2 that represent the punched contour by the press machine 50, and recession amounts that indicate dimensional changes from a predetermined position of the punched contour in each area.
- the CPU 1 acquires a measured waveform that indicates the measurement result of the machining load by the press machine 50 (S1).
- the CPU 1 generates a reference waveform related to the machining load based on the unit waveform and the contour parameters (S501, S505).
- the CPU 1 determines the degree of agreement between the reference waveform and the measured waveform (S502, S506), and estimates the machining state in each area based on the determined degree of agreement.
- the state parameters may define the machining state per predetermined unit length of the punched contour, and the unit waveform may correspond to the state parameters per predetermined unit length of the punched contour.
- the CPU 1 may generate a zone waveform for each zone related to the machining load by multiplying the unit waveform by the ratio of the zone length to the unit length for each zone (S5011).
- the CPU 1 generates a reference waveform related to the machining load over the entire length of the punched contour by synthesizing the zone waveforms for each zone (S5013).
- the measured waveform and unit waveform may be data showing the relationship between the processing load applied by the press 50 and the distance traveled by the punch 73 relative to the die 63 of the press 50.
- the CPU 1 adds the retraction amount corresponding to each zone defined in the contour parameters to the zone waveform for each zone (S5012), and synthesizes the zone waveform for each zone to which the retraction amount has been added.
- the processing state can be estimated with greater accuracy by synthesizing the zone waveforms taking into account the retraction amount for each zone.
- the CPU 1 may generate a reference waveform for the processing load over the entire length of the punched contour by calculating the sum of the area waveforms for each area. With this configuration, the processing state can be estimated more accurately than with conventional techniques.
- the CPU 1 may search for a reference waveform that has the highest degree of match with the measured waveform, and determine the state parameters and contour parameters corresponding to the unit waveform that is the basis of the searched reference waveform as estimated parameters that represent the processing state at the time the measured waveform was measured.
- the specified range is set too wide, it is not possible to detect abnormalities in the device, such as tool wear or chipping, and if it is set too narrow, it is possible to determine that an abnormality exists even when the device is normal.
- the machining state estimation device 100 which searches for a reference waveform, is able to estimate the machining state more accurately than the conventional technique.
- the CPU 1 may search for a reference waveform that maximizes the degree of match with the measured waveform by sequentially changing parameters within a predetermined range based on the estimated parameters already determined by the CPU 1.
- the machining state can be estimated with higher accuracy by performing a search based on the above criteria.
- the amount of calculation required for estimation can be reduced compared to when the above criteria are not present.
- the estimated parameters may include an estimated area length estimated as the area length of the measured waveform at the time of measurement, and an estimated amount of retraction estimated as the amount of retraction of the measured waveform at the time of measurement.
- the CPU 1 may set the estimated area length and the estimated retreat amount to initial values (S60). With this configuration, the wear amount of the punch 73 or die 63 can be estimated with greater accuracy. In addition, because the estimated area length and the estimated retreat amount are set to initial values, the amount of calculation required to search for and estimate the punch wear parameters or die wear parameters can be reduced.
- the press 50 may perform cyclic processing.
- the CPU 1 acquires the measured waveforms of each cycle of the press 50 in chronological order. If the degree of match between the current measured waveform acquired in a specific processing cycle and the previous measured waveform acquired in the processing cycle immediately preceding the specific processing cycle is greater than a predetermined threshold (Yes in S5B), the CPU 1 searches for a reference waveform that has the greatest degree of match with the current measured waveform, and determines the contour parameters corresponding to the unit waveform that is the basis of the searched reference waveform as estimated parameters that represent the processing state at the time of measurement of the current measured waveform (S53). With this configuration, the amount of setback can be estimated more accurately than with conventional techniques.
- the state parameters may include wear parameters that define the degree of wear of the punch 73 or die 63 of the press 50. If the degree of match between the current measured waveform and the previous measured waveform is equal to or less than a threshold value (No in S5B), the CPU 1 searches for a reference waveform that has the highest degree of match with the current measured waveform, and determines the wear parameters corresponding to the unit waveform that is the basis of the searched reference waveform as the estimated parameters that represent the machining state at the time of measuring the current measured waveform. If the degree of match between the current measured waveform and the previous measured waveform is greater than the threshold value (Yes in S5B), it is not necessary to determine the wear parameters as the estimated parameters. With this configuration, the amount of calculation required to search for and estimate punch wear parameters or die wear parameters can be reduced.
- the CPU 1 may set the wear parameters as estimated parameters to initial values (S535). This configuration can reduce the amount of calculation required to search for and estimate the punch wear parameters or die wear parameters.
- the amount of setback may be set to be constant for each area. This configuration can reduce the amount of calculation required for the calculation based on the amount of setback (S5012).
- the first area A1 of the state data 22 corresponds to an area where chipping does not occur
- the second area A2 corresponds to an area where chipping occurs
- an area obtained by dividing the punching contour may be added when chipping is estimated to occur. That is, the area in the state data 22 in FIG. 9 is one when chipping does not occur, and becomes multiple only when chipping is estimated to occur.
- the second embodiment predicts the chipping state including the distribution in the depth direction. That is, in the second embodiment, the retraction amount may not be constant in the chipping width direction and may have a distribution. In the second embodiment, the machining state estimating device 100 predicts the distribution of the retraction amount in the depth direction in the chipping width direction by expressing the chipping distribution with a parameter.
- FIG. 22A is a graph illustrating the relationship between the actual recession amount of the edge of the punch 73 and the circumferential position of the punched contour. Since FIG. 22A is the same as FIG. 7, a detailed description is omitted.
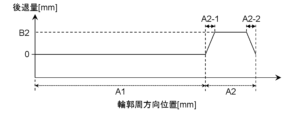
- FIG. 22B is a diagram for explaining an example of a retraction amount parameter corresponding to the actual retraction amount in FIG. 22A.
- the retraction amount parameter is not constant but has a distribution.
- areas A2-1 and A2-2 in the second area A2 are areas where the retraction amount changes due to chipping, and in FIG. 22B, this change is approximated by a straight line.
- the absolute value of the slope of the straight line in area A2-1 is equal to the absolute value of the slope of the straight line in area A2-2.
- FIG. 22C is a diagram for explaining another example of the retraction amount parameter corresponding to the actual retraction amount in FIG. 22A.
- the graph in FIG. 22C is obtained by combining the linear segments having a slope in areas A2-1 and A2-2 in FIG. 22B into one area A2-3. Therefore, the slope of the straight line in area A2-3 in FIG. 22B is 1/2 times the slope of the straight line in area A2-1.
- similar results can be obtained using either of the retraction amount parameters shown in FIG. 22B and FIG. 22C, so the retraction amount parameter in FIG. 22C, which allows for simpler calculations than FIG. 22B, may be used.
- FIG. 23 is a table showing an example of status data 22A in this embodiment. Compared to the status data 22 in the first embodiment shown in FIG. 9, the status data 22A further includes distribution parameters in addition to the contour parameters.
- the distribution parameter in the first area A1 is represented as E1
- the distribution parameter in the second area A2 is represented as E2.
- the distribution parameter E1 of the first area A1 where no chipping occurs is 0.
- the distribution parameter E2 of the second area A2 where chipping occurs represents the waveform in area A2 in FIG. 22C.
- the chipping parameters correspond to the area length W2, the setback amount B2, and the distribution parameter E2.
- FIG. 24A is an enlarged view of the second area A2 in FIG. 22C, and shows the distribution of the retreat amount in the second area A2 of the state data 22A.
- FIG. 24B shows areas Q1 to Q4 obtained by subdividing the second area A2 according to the retreat amount.
- the retreat amount is subdivided (discretized) at regular intervals.
- the retreat amount can be any of the amounts including B2 and the amounts B21, B22, and B23 obtained by dividing B2 into four.
- the second area A2 is divided into areas Q1, Q2, Q3, and Q4 corresponding to the retreat amounts B21, B22, B23, and B2, respectively, based on the distribution parameter E2 and the retreat amount B2.
- the second area A2 is divided into four areas, but the second area A2 may be divided into two or three areas, or into five or more areas.
- the CPU 1 of the machining state estimation device 100 uses the parameters obtained by subdividing. In the above example, the CPU 1 performs the estimation process using the parameters B21, B22, B23, and B2 obtained by subdividing.
- FIGS. 25A and 25B are graphs for explaining the synthesis of waveforms taking into account the amount of retraction of punch 73 in this embodiment.
- FIG. 25A has four waveforms corresponding to areas Q1 to Q4, respectively, instead of one waveform corresponding to the second area A2. Note that in FIG. 25A, for the sake of convenience, the waveforms corresponding to areas Q1 and Q3 are shown by dashed lines to make it easier to distinguish each waveform.
- the waveforms corresponding to areas Q1 to Q4 are shifted in the distance direction by the corresponding retreat amounts B1, B21, B22, B23, and B2, respectively, in step S5012 (see FIG. 14).
- FIG. 25B is a schematic graph showing a reference waveform obtained by adding together the five waveforms in FIG. 25A.
- CPU 1 generates the reference waveform in FIG. 25B, which indicates the load over the entire length of the punching contour, by combining the five waveforms in FIG. 25A.
- step S534 of the chipping estimation process S53 shown in FIG. 18 the CPU 1 executes a process to prepare provisional state data in which the chipping parameters of the state data, that is, the area length W2, the setback amount B2, and the distribution parameter E2, are set to one of the candidate values.
- the amount of retraction can vary in each zone depending on the position in the longitudinal direction of the zone length.
- the machining state estimation device 100 estimates the machining state including the distribution of the amount of retraction in the depth direction relative to the chipping width direction by expressing the distribution of the amount of retraction with a parameter. This allows the machining state estimation device 100 to generate a reference waveform related to the machining load that is more consistent with the measured waveform (S501, S505).
- the machining state estimation device 100 can more easily increase the degree of agreement between the measured waveform and the reference waveform, and therefore can obtain the convergence condition (S533) more quickly in the chipping estimation process S53.
- the machining state of the press machine 50 can be estimated more accurately than with conventional techniques by estimating the machining state in each of the multiple areas obtained by dividing the punched contour.
- the machining state estimation device 100 can detect the distribution of the amount of recession of the chipping of the punch 73 and/or the die 63.
- the amount of setback in the second area A2 may be represented by a function.
- distribution parameter E2 indicates that the recession amount is a linear function of the contour circumferential position.
- the function may be, for example, a cumulative distribution function of a normal distribution with the distribution parameter being the variance value ⁇ .
- FIG. 26 is a diagram showing the amount of retraction represented by the state data in this modified example.
- the distribution of the amount of retraction in the second area A2 in FIG. 26 is found by applying the distribution parameter E2 and the amount of retraction B2 to a function. Thereafter, as in the second embodiment, area A2 is divided into smaller areas according to the amount of retraction to obtain a composite waveform.
- the initial values of the retraction amounts B1 and B2 are both 0 mm
- the initial values of the retraction amounts of the tool of the present disclosure may have different values for each zone. That is, the initial values of the retraction amounts of the tool of the present disclosure may have a distribution according to the circumferential position of the punched contour.
- a third embodiment will be described as an example having such a distribution.
- Figure 27 is a schematic cross-sectional view of the punch 73a of the press machine 50 according to the third embodiment.
- Figure 27 is a view of a cross section of the punch 73a parallel to the XY plane, viewed in the positive direction of the Z axis (i.e., from below).
- the punched contour is divided into nine regions, A1 to A9. Where the punched contour is divided is determined in advance according to the shape of the punched contour.
- the punched contour is a rectangle with rounded corners, and the punched contour is divided between each corner of the rounded rectangle and the straight line portions. Furthermore, of the four straight line portions (four sides), each of the two straight line portions on the longer sides is divided into five.
- the two portions that are symmetrical with respect to a line that passes through the center of the punched contour and is parallel to the X-axis are given the same reference symbol.
- the 9 o'clock direction on the paper is used as the reference (starting point) for the position of the punched contour, and the area including the starting point is the first area A1.
- the first area A1 is followed by the second to ninth areas A2 to A9 in a counterclockwise direction when viewed from the bottom.
- the starting point of the first area A1 when the punched contour is viewed counterclockwise from the bottom is used as the reference for the position of the punched contour.
- Figure 28 is a cross-sectional view of punch 73a parallel to the ZX plane, viewed in the positive direction of the Y axis (from the negative side of the Y axis).
- Retraction amounts B1 to B9 shown in Figure 28 respectively represent the retraction amounts of areas A1 to A9 based on a specific Z position L0.
- B1i 0, and B1i ⁇ B2i ⁇ B3i ⁇ B4i ⁇ B5i ⁇ B6i ⁇ B7i ⁇ B8i ⁇ B9i.
- the initial value of the recession amount of the punching contour of punch 73 has the same value (0 mm) over the entire punching contour (punching is performed at the same Z-axis height by design).
- the initial value of the recession amount of punch 73a has a gradient with respect to the Z-axis and has a distribution along the punching contour. Therefore, in this embodiment, the workpiece is punched at continuously different Z-axis heights by design, that is, shear punching is performed.
- Figure 29 is a graph illustrating the relationship between the actual recession amount of the edge of punch 73a and the circumferential position of the punched contour.
- the horizontal axis of Figure 29 shows areas A1 to A9, which correspond to the circumferential position of the punched contour.
- FIG. 30 shows data obtained by subdividing (discretizing) the actual retraction amount in FIG. 29.
- CPU 1 performs calculations using, for example, the data shown in FIG. 30.
- the retraction amount in each area is represented as a single parameter that is a representative value of the actual retraction amount.
- the retraction amount in the second area A2 is represented by the representative value B2 of the actual retraction amount.
- the retraction amounts in the third area A3 to the ninth area are represented by representative values B3 to B9 of the actual retraction amount, respectively.
- the representative value is, for example, the maximum value, median value, or average value.
- FIG. 31 is a table showing an example of status data 22B in this embodiment.
- Status data 22B includes data on more areas than status data 22 in the first embodiment shown in FIG. 9. Furthermore, unlike the first embodiment, the initial values B1i to B9i of the retreat amounts B1 to B9 for each area can be different.
- the CPU 1 of the machining state estimation device 100 uses state data 22B in the machining state estimation process.
- FIGS. 32A and 32B are graphs for explaining the synthesis of waveforms taking into account the amount of retraction of punch 73a in this embodiment. While there are only two waveforms in FIG. 10A of the first embodiment, there are nine waveforms in FIG. 32A, each of which corresponds to an area A1 to A9.
- the waveforms corresponding to areas A1 to A9 are shifted in the distance direction by the corresponding retreat amounts B1 to B9 in step S5012 (see FIG. 14).
- FIG. 32B is a schematic graph showing a reference waveform obtained by adding the nine waveforms in FIG. 32A.
- CPU 1 generates the reference waveform in FIG. 32B, which indicates the load over the entire length of the punching contour, by combining the nine waveforms in FIG. 32A.
- the contour parameters define the region lengths W1 to W9, which indicate the lengths of each of the multiple regions A1 to A9 that represent the punched contour by the press 50, and the recession amounts B1 to B9, which indicate the dimensional change from a predetermined position of the punched contour in each region.
- the initial values B1i to B9i of the estimated recession amounts in the multiple regions A1 to A9 are different for each region.
- the machining state estimation device 100 can estimate the machining state regardless of the presence or absence of chipping, even if the tool is a shear blade.
- the CPU 1 can generate a reference waveform that is more consistent with the measured waveform by taking into account the distribution of the retraction amount relative to the position, and can estimate the machining state of the press machine 50 with greater accuracy than conventional technology.
- the state data 22 includes a punch wear amount, a die wear amount, and a clearance as tool state parameters (see FIG. 9 ), and the CPU 1 estimates these three tool state parameters and a contour parameter.
- the machining state estimation device may be configured to estimate at least one of the above tool state parameters.
- the machining state estimation device can estimate the clearance of multiple areas obtained by dividing the punching contour, and can estimate the clearance with higher accuracy than in the past. Even when other embodiment 1 is applied to a press machine having a shear blade as in the third embodiment, it is possible to estimate the clearance between the punch (shear blade) and the die.
- the CPU 1 executes the reference waveform generation process S501 corresponding to the status data, but the present disclosure is not limited to this.
- reference waveforms corresponding to all combinations of the areas A1, A2, and parameters may be calculated in advance by the CPU 1 or an external calculation device, and all the calculated reference waveforms may be linked to the combinations of the areas A1, A2, and parameters and stored in advance in the storage device 2.
- the CPU 1 calculates the degree of match between the reference waveform stored in the storage device 2 and the measured waveform acquired in step S1, and identifies the reference waveform with the highest degree of match.
- the identified reference waveform is linked to the combination of areas A1, A2 and parameters, so that the amount of wear, clearance, and other parameters of each area can be estimated from the identified reference waveform.
- the CPU 1 does not need to generate multiple reference waveforms in real time, which reduces the processing load and processing time of the CPU 1.
- a storage device and a processor includes: Standard reference data corresponding to parameters defining the processing state of the press; storing area shape information;
- the zone shape information is information that specifies a zone length indicating a length of each of at least one zone that represents a punched contour by the press machine, and a recession amount indicating a dimensional change from a predetermined position of the punched contour in each zone,
- the processor Obtaining measurement data indicating a measurement result of a processing load by the press machine; generating comprehensive reference data for the processing load based on the reference data and the area shape information; determining a similarity measure that is an indication of the degree of similarity between the synthetic reference data and the measurement data; estimating the processing state in each of the zones based on the determined similarity; Machining state estimation device.
- the parameters define a processing state per a predetermined unit length of the punched contour, the nominal reference data corresponds to the parameters per predetermined unit length of the punched contour;
- the processor In the process of generating the comprehensive reference data, the processor generating zone data for each zone relating to the processing load by multiplying the reference data by a ratio of the zone length to the unit length for each zone; generating a total reference data for the processing load over the entire length of the punching contour by combining the zone data for each zone; 2.
- the machining state estimation device according to claim 1.
- the measurement data and the standard reference data are data indicating a relationship between a processing load applied by the press machine and a moving distance of a punch relative to a die of the press machine
- the processor adds the setback amount corresponding to each of the zones defined in the zone shape information to the zone data for each of the zones, and synthesizes the zone data for each of the zones to which the setback amount has been added.
- the machining state estimation device according to aspect 2.
- ⁇ Aspect 5> The processor, Searching for comprehensive reference data that maximizes the similarity to the measurement data; The parameters corresponding to the reference reference data that is the basis of the searched comprehensive reference data and the area shape information are determined as estimated parameters that represent the processing state at the time of measuring the measurement data.
- the machining state estimating device according to any one of aspects 1 to 4.
- ⁇ Aspect 7> The machining state estimation device according to aspect 5 or 6, wherein the estimation parameters include an estimated area length estimated as the area length at the time of measurement of the measurement data, and an estimated retraction amount estimated as the retraction amount at the time of measurement of the measurement data.
- ⁇ Aspect 8> The machining state estimation device according to claim 7, wherein the processor sets the estimated area length and the estimated setback amount to initial values when a signal is received indicating that a punch or a die of the press has been replaced or ground.
- the zone shape information specifies zone lengths indicating the lengths of each of a plurality of zones representing a punched contour by the press machine, and recess amounts indicating dimensional changes from a predetermined position of the punched contour in each zone, The initial value of the estimated retreat amount in the plurality of zones is different for each zone.
- a machining state estimation device according to aspect 8.
- the press performs cycle processing,
- the processor Obtaining measurement data for each cycle of the press in chronological order;
- a predetermined threshold value Searching for comprehensive reference data that maximizes the similarity to the current measurement data;
- the machining state estimating device according to any one of aspects 1 to 9.
- the parameters include a wear parameter defining a degree of wear of a punch or die of the press;
- the processor Searching for comprehensive reference data that maximizes the similarity to the current measurement data;
- the machining state estimation device wherein the wear parameters corresponding to the reference reference data that is the basis of the searched comprehensive reference data are determined as estimated parameters that represent the machining state at the time of measurement of the current measurement data.
- ⁇ Aspect 12> 12 The machining state estimating device according to claim 11, wherein the processor sets the wear parameter as the estimation parameter to an initial value when a similarity between the current measurement data and the previous measurement data is greater than the threshold value.
- a machining state estimating device according to any one of Aspects 1 to 12, wherein the retraction amount is constant in each of the zones.
- ⁇ Aspect 14> The machining state estimating device according to any one of aspects 1 to 12, wherein the retraction amount is variable in each of the zones depending on a position in a longitudinal direction of the zone length.
- the processor Standard reference data corresponding to parameters defining the processing state of the press;
- Zone shape information defining a zone length indicating the length of each of at least one zone representing a punched contour by the press and a recession amount indicating a dimensional change from a predetermined position of the punched contour in each zone;
- the processor estimates the processing state in each of the zones based on the determined similarity;
- the machining state estimation method includes the steps of:
- the processing state of a press machine can be estimated more accurately than with conventional technology.
- This disclosure is applicable to press machines.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Computer Hardware Design (AREA)
- Quality & Reliability (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Punching Or Piercing (AREA)
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202480029663.8A CN121127361A (zh) | 2023-05-10 | 2024-03-21 | 加工状态推定装置以及加工状态推定方法 |
| JP2025519332A JPWO2024232166A1 (https=) | 2023-05-10 | 2024-03-21 | |
| US19/372,341 US20260054343A1 (en) | 2023-05-10 | 2025-10-29 | Machining-state-estimating device, and machining-state-estimating method |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2023-078008 | 2023-05-10 | ||
| JP2023078008 | 2023-05-10 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US19/372,341 Continuation US20260054343A1 (en) | 2023-05-10 | 2025-10-29 | Machining-state-estimating device, and machining-state-estimating method |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2024232166A1 true WO2024232166A1 (ja) | 2024-11-14 |
Family
ID=93431545
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2024/010957 Ceased WO2024232166A1 (ja) | 2023-05-10 | 2024-03-21 | 加工状態推定装置及び加工状態推定方法 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20260054343A1 (https=) |
| JP (1) | JPWO2024232166A1 (https=) |
| CN (1) | CN121127361A (https=) |
| WO (1) | WO2024232166A1 (https=) |
Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05212455A (ja) * | 1992-02-03 | 1993-08-24 | Amada Co Ltd | プレス金型の寿命検出方法および装置 |
| JPH0686038B2 (ja) * | 1989-03-29 | 1994-11-02 | 株式会社アマダ | プレス機械 |
| JP2939479B2 (ja) * | 1990-11-13 | 1999-08-25 | 川崎油工株式会社 | プレスの予防保全方法 |
| JP3231536B2 (ja) * | 1993-02-25 | 2001-11-26 | トヨタ自動車株式会社 | プレス機械の異常診断方法 |
| JP2017087224A (ja) * | 2015-11-04 | 2017-05-25 | 凸版印刷株式会社 | パンチ装置および打ち抜き加工方法 |
| JP6163215B2 (ja) * | 2011-05-10 | 2017-07-12 | フェッテ コンパクティング ゲーエムベーハー | タブレットプレスの測定装置の較正及びバランシングのための装置及び方法 |
| JP2020127968A (ja) * | 2019-02-07 | 2020-08-27 | パナソニックIpマネジメント株式会社 | 学習装置および切断加工評価システム |
| JP7134652B2 (ja) * | 2018-03-12 | 2022-09-12 | 曙ブレーキ工業株式会社 | 異常検知方法および異常検知装置 |
| WO2023162305A1 (ja) * | 2022-02-28 | 2023-08-31 | パナソニックIpマネジメント株式会社 | 加工状態推定装置及び加工状態推定方法 |
| WO2023162306A1 (ja) * | 2022-02-28 | 2023-08-31 | パナソニックIpマネジメント株式会社 | 加工状態推定装置及び加工状態推定方法 |
-
2024
- 2024-03-21 JP JP2025519332A patent/JPWO2024232166A1/ja active Pending
- 2024-03-21 WO PCT/JP2024/010957 patent/WO2024232166A1/ja not_active Ceased
- 2024-03-21 CN CN202480029663.8A patent/CN121127361A/zh active Pending
-
2025
- 2025-10-29 US US19/372,341 patent/US20260054343A1/en active Pending
Patent Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0686038B2 (ja) * | 1989-03-29 | 1994-11-02 | 株式会社アマダ | プレス機械 |
| JP2939479B2 (ja) * | 1990-11-13 | 1999-08-25 | 川崎油工株式会社 | プレスの予防保全方法 |
| JPH05212455A (ja) * | 1992-02-03 | 1993-08-24 | Amada Co Ltd | プレス金型の寿命検出方法および装置 |
| JP3231536B2 (ja) * | 1993-02-25 | 2001-11-26 | トヨタ自動車株式会社 | プレス機械の異常診断方法 |
| JP6163215B2 (ja) * | 2011-05-10 | 2017-07-12 | フェッテ コンパクティング ゲーエムベーハー | タブレットプレスの測定装置の較正及びバランシングのための装置及び方法 |
| JP2017087224A (ja) * | 2015-11-04 | 2017-05-25 | 凸版印刷株式会社 | パンチ装置および打ち抜き加工方法 |
| JP7134652B2 (ja) * | 2018-03-12 | 2022-09-12 | 曙ブレーキ工業株式会社 | 異常検知方法および異常検知装置 |
| JP2020127968A (ja) * | 2019-02-07 | 2020-08-27 | パナソニックIpマネジメント株式会社 | 学習装置および切断加工評価システム |
| WO2023162305A1 (ja) * | 2022-02-28 | 2023-08-31 | パナソニックIpマネジメント株式会社 | 加工状態推定装置及び加工状態推定方法 |
| WO2023162306A1 (ja) * | 2022-02-28 | 2023-08-31 | パナソニックIpマネジメント株式会社 | 加工状態推定装置及び加工状態推定方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2024232166A1 (https=) | 2024-11-14 |
| US20260054343A1 (en) | 2026-02-26 |
| CN121127361A (zh) | 2025-12-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN111046084A (zh) | 一种多元时间序列监测数据的关联规则挖掘方法 | |
| CN118742401A (zh) | 加工状态推定装置以及加工状态推定方法 | |
| US10525563B2 (en) | Abnormality-detecting device and method for tool of machine tool | |
| CN106334726A (zh) | 模具的异常预测系统、压力机以及模具的异常预测方法 | |
| JP6680430B1 (ja) | 生産ラインにおける品質と設備の統合的監視方法 | |
| JP6904812B2 (ja) | 金型寿命判定装置、及びプレス成形物の製造方法 | |
| EP1451550A1 (en) | Systems and methods for identifying the presence of a defect in vibrating machinery | |
| TW202012905A (zh) | 刀具磨耗監控方法 | |
| CN111390647A (zh) | 刀具寿命预测系统及其方法 | |
| CN109725601A (zh) | 综合加工系统、综合加工方法以及计算机可读介质 | |
| JP6815368B2 (ja) | 異常検知装置、異常検知方法、制御プログラム、および記録媒体 | |
| JP2024082184A (ja) | 加工精度の判定方法および判定モデルの学習方法 | |
| WO2023162305A1 (ja) | 加工状態推定装置及び加工状態推定方法 | |
| WO2024232166A1 (ja) | 加工状態推定装置及び加工状態推定方法 | |
| CN117407735A (zh) | 基于演化聚类分析的刀具磨损建模方法 | |
| WO2024262138A1 (ja) | 加工状態推定装置及び加工状態推定方法 | |
| CN119740147B (zh) | 一种切片机刀片磨损监测方法及系统 | |
| CN121169932A (zh) | 一种基于图像处理的锻件轮廓自动提取方法及系统 | |
| JP2020038553A (ja) | 摩耗量推定システム、補正システム、異常検知システム、寿命検知システム、工作機械及び摩耗量推定方法 | |
| CN120148220A (zh) | 基于工业物联网的数控机床故障预警方法及系统 | |
| Li et al. | Lifespan prediction of cutting tools for high-value-added products | |
| Zaretalab et al. | Machining condition-based stochastic modeling of cutting tool’s life | |
| CN118655831A (zh) | 一种钛合金金属加工过程中的工艺参数调节方法 | |
| US12115613B2 (en) | Machining dimension prediction apparatus, machining dimension prediction system, machining dimension prediction method, and recording medium | |
| KR100604227B1 (ko) | 잔재부상검출장치 및 그 검출방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 24803281 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2025519332 Country of ref document: JP Kind code of ref document: A |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2025519332 Country of ref document: JP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: CN2024800296638 Country of ref document: CN |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |