WO2024142308A1 - 飛行体 - Google Patents
飛行体 Download PDFInfo
- Publication number
- WO2024142308A1 WO2024142308A1 PCT/JP2022/048352 JP2022048352W WO2024142308A1 WO 2024142308 A1 WO2024142308 A1 WO 2024142308A1 JP 2022048352 W JP2022048352 W JP 2022048352W WO 2024142308 A1 WO2024142308 A1 WO 2024142308A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- aircraft
- relay
- motor
- section
- wire
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U20/00—Constructional aspects of UAVs
- B64U20/70—Constructional aspects of the UAV body
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C27/00—Rotorcraft; Rotors peculiar thereto
- B64C27/04—Helicopters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C39/00—Aircraft not otherwise provided for
- B64C39/02—Aircraft not otherwise provided for characterised by special use
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64D—EQUIPMENT FOR FITTING IN OR TO AIRCRAFT; FLIGHT SUITS; PARACHUTES; ARRANGEMENT OR MOUNTING OF POWER PLANTS OR PROPULSION TRANSMISSIONS IN AIRCRAFT
- B64D1/00—Dropping, ejecting, releasing or receiving articles, liquids, or the like, in flight
- B64D1/22—Taking-up articles from earth's surface
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U10/00—Type of UAV
- B64U10/10—Rotorcrafts
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U10/00—Type of UAV
- B64U10/10—Rotorcrafts
- B64U10/13—Flying platforms
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U10/00—Type of UAV
- B64U10/10—Rotorcrafts
- B64U10/13—Flying platforms
- B64U10/16—Flying platforms with five or more distinct rotor axes, e.g. octocopters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U30/00—Means for producing lift; Empennages; Arrangements thereof
- B64U30/20—Rotors; Rotor supports
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U50/00—Propulsion; Power supply
- B64U50/10—Propulsion
- B64U50/19—Propulsion using electrically powered motors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U80/00—Transport or storage specially adapted for UAVs
- B64U80/80—Transport or storage specially adapted for UAVs by vehicles
- B64U80/82—Airborne vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U2101/00—UAVs specially adapted for particular uses or applications
- B64U2101/60—UAVs specially adapted for particular uses or applications for transporting passengers; for transporting goods other than weapons
Definitions
- the present invention relates to an aircraft that flies with a load suspended from it.
- An aircraft can fly while holding a suspended load (item) such as luggage.
- a suspended load such as luggage.
- the aircraft (unmanned aircraft) disclosed in the patent document suspends the load from a support member (wire).
- the present invention aims to reduce the effects that hinder precise control of an aircraft.
- an aircraft in order to achieve the above object, is an aircraft that flies with a load suspended therefrom, and includes a lift generating section that generates lift used for flight, a plurality of support members that support the load, a mounting section to which the support members are attached, and an intermediary section that relays and supports the support members between the load and the mounting section, with one of the mounting sections and the intermediary section being positioned further outboard of the aircraft than the other in a plan view.
- multiple attachment points and hoisting parts are provided in the outer area of the aircraft, and the load is suspended from the outside of the aircraft by multiple support members.
- the weight on the outside of the aircraft becomes heavy due to the attachment points and hoisting parts, making the aircraft unstable.
- the weight of the load is supported by the outer area of the aircraft, making the aircraft unstable.
- the lighter of the mounting section and relay section can be positioned on the outside of the aircraft, rather than the heavier one. This prevents the weight of the outer regions of the aircraft from becoming too heavy, and the aircraft's weight balance is in a state that makes it easier to stabilize the aircraft. As a result, the stability of the aircraft is improved, and the flying object can be controlled with precision.
- the other of the mounting portion and the relay portion may be disposed in a central region of the aircraft in a plan view.
- the heavier of the mounting and relay parts can be positioned in the central region of the aircraft, for example, at a position that overlaps with the center position/center of gravity of the aircraft in a plan view, and the lighter part can be positioned further to the outside of the aircraft (outer region) than the heavier part.
- the attachment section may also have a winding section that reels out or winds up the support member to adjust the length of the support member, and the relay section may be positioned outside the winding section.
- This configuration allows the attachment section to be positioned on the outside of the aircraft, rather than the hoisting section, which is generally heavier. This prevents the weight of the outer areas of the aircraft from becoming too heavy, and the aircraft's weight balance makes it easier to stabilize the aircraft. As a result, the stability of the aircraft is improved, and the flying object can be controlled with precision.
- the motors which are generally heavier, are concentrated in the central region of the aircraft. This prevents the weight of the outer regions of the aircraft from becoming too heavy, and the weight balance of the aircraft makes it easier to stabilize the aircraft. Also, because multiple motors are unitized and equipped with waterproof and dustproof sections, the total weight of the motors is lighter than in a configuration in which each motor is equipped with a waterproof and dustproof section, making the aircraft lighter. As a result of the above, the stability of the aircraft is improved, and the flying object can be controlled with precision.
- the main lift generating unit generates the buoyancy and thrust of the aircraft, while the secondary lift generating unit controls the attitude of the aircraft.
- the secondary lift generating unit can efficiently control the attitude of the area where the relay unit is located. As a result, the stability of the aircraft can be improved, and the flying object can be controlled with precision.
- This configuration makes it easy to generate the lift that propels the aircraft.
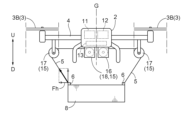
- FIG. 2 is a side view illustrating the configuration of an aircraft with a payload suspended therefrom.
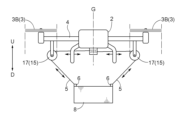
- FIG. 2 is a plan view illustrating the configuration of an aircraft with a payload suspended therefrom.
- FIG. 2 is a diagram illustrating an example of a configuration of a motor unit.
- FIG. 13 is a diagram illustrating a configuration of a relay mechanism.
- 1 is a side view illustrating the configuration of an aircraft provided with an attachment portion as an attachment mechanism; 1 is a side view illustrating the configuration of an aircraft that suspends a payload by a looped wire.
- the load 8 may be luggage (carried object) that the drone transports, or a work machine that the drone suspends and moves to perform work, or it may be anything that can be suspended by a drone and fly.
- the support member is, for example, multiple wires 5, and may be a rod-shaped member that is stretchable and/or can swing around a pivot point.
- a drone in which the rotors 3 are used as lift generating units and the wires 5 are used as support members will be described as an example.
- Each wire 5 is supported by the drone via an attachment mechanism 15.
- Each wire 5 has a support 6 such as a hook at its end.
- the payload 8 is suspended from the drone by being supported by the wire 5 via the support 6. This allows the drone to fly with the payload 8 loaded. Furthermore, the configuration in which the payload 8 is suspended makes it easy to attach and detach the payload 8.
- each attachment mechanism 15 is provided for each wire 5, and each attachment mechanism 15 includes an attachment section 16 to which the wire 5 is attached and a relay section 17 to support the wire 5.
- the wire 5 is attached to the airframe by the attachment section 16, and is supported by the relay section 17 to the airframe.
- the attachment section 16 is a motor 18 that is a hoisting section that can adjust the length of the wire 5 from the airframe to the load 8 by unwinding or winding the wire 5. That is, the attachment mechanism 15 includes the same number of motors 18 and relay sections 17 as the number of wires 5.
- At least one of the motors 18 is provided in the central region of the aircraft, and preferably all of the motors 18 are provided in the central region of the aircraft on the underside of the main body 2.
- the central region is a region that includes the central position or center of gravity G of the aircraft in a planar view and is close to the central position or center of gravity G.
- multiple motors 18 are arranged close to each other, and the motors 18 are arranged so that the center of gravity of the aggregate of multiple motors 18 overlaps with or is close to the central position or center of gravity G of the aircraft in a planar view.
- the central position is the midpoint of the length in the width direction of the drone's body, for example, the midpoint of the length in the width direction of the main body 2.
- the motor 18 is heavier than the relay unit 17. If the center of gravity of the aircraft is closer to the central region of the aircraft, the aircraft will be more stable and the attitude of the aircraft will be easier to control than if the center of gravity is in an outer region of the aircraft. Therefore, by locating the relay unit 17 outside the motor 18, the outer region of the aircraft will be lighter than the central region of the aircraft, and the aircraft will be more stable. As a result, the flying object can be controlled with high precision.
- the position of the motor 18, the positional relationship between the motor 18 and the relay mechanism 22, and the configuration of the relay mechanism 22 can be freely adjusted to improve the weight balance of the aircraft.
- the payload 8 can be stably suspended, the stability of the aircraft can be improved, and the aircraft can be controlled with precision.
- the position at which the payload 8 is suspended on the aircraft can be freely configured.
- the payload 8 can be suspended at an appropriate position using a single wire 5.
- the payload 8 can be suspended in a balanced manner by attaching each wire 5 to an appropriate position. This also improves the stability of the aircraft and allows the aircraft to be controlled with precision.
- the relay mechanism 22 includes a first relay part 24 and a second relay part 25.
- the wire 5 is connected from the motor 18 to the payload 8 via the first relay part 24 and the second relay part 25 in that order.
- One of the first relay part 24 and the second relay part 25 is disposed in the central region of the aircraft, and the other is disposed in the outer region of the aircraft.
- the force required for the motor 18 to wind up the wire 5 (to lift the load 8) can be reduced, and the motor 18 can be made smaller.
- the weight reduction achieved by making the motor 18 smaller will be greater than the weight increase achieved by providing the first relay section 24, and the total weight of the aircraft can be reduced. This allows the flight range to be increased and the aircraft to be controlled with precision. Furthermore, by reducing the total weight of the aircraft, the payload of the aircraft can be improved, making it possible to support a heavier load 8.
- the second relay section 25 is preferably arranged outside the first relay section 24.
- the first relay section 24 is preferably arranged in the central region of the aircraft, and the second relay section 25 is preferably arranged in the outer region of the aircraft.
- the second relay section 25 can be arranged in a position overlapping with the sub-rotor 3B in a planar view, and specifically, it is preferable that the center of the second relay section 25 overlaps with the center of the sub-rotor 3B in a planar view.
- the motor 18 is preferably arranged inside the second relay section 25 (towards the center position or center of gravity G of the aircraft), preferably in the central region, and more preferably inside the first relay section 24.
- the load 8 is not limited to being suspended by multiple wires 5, but may be suspended by a single wire 5.
- the second relay part 25 is provided in the central region of the vehicle, and the load 8 is suspended below the central region of the vehicle. Even in this case, by providing the first relay part 24, the motor 18 can be made smaller, and the vehicle can be made lighter.
- the relay unit 17 is not limited to being arranged outside the motor 18, and the relay unit 17 may be arranged in the central region and the motor 18 may be arranged outside the relay unit 17.
- one of the motor 18 (mounting unit 16) and the relay unit 17 is arranged on the outside of the aircraft in a planar view compared to the other.
- one of the motor 18 (mounting unit 16) and the relay unit 17 is arranged in the central region and the other is arranged in the outer region.
Landscapes
- Engineering & Computer Science (AREA)
- Aviation & Aerospace Engineering (AREA)
- Remote Sensing (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Forklifts And Lifting Vehicles (AREA)
- Load-Engaging Elements For Cranes (AREA)
- Catching Or Destruction (AREA)
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP22970097.6A EP4644275A1 (en) | 2022-12-27 | 2022-12-27 | Flying object |
| PCT/JP2022/048352 WO2024142308A1 (ja) | 2022-12-27 | 2022-12-27 | 飛行体 |
| JP2024567084A JPWO2024142308A1 (https=) | 2022-12-27 | 2022-12-27 | |
| US19/229,070 US12612194B2 (en) | 2022-12-27 | 2025-06-05 | Aerial vehicle |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2022/048352 WO2024142308A1 (ja) | 2022-12-27 | 2022-12-27 | 飛行体 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US19/229,070 Continuation US12612194B2 (en) | 2022-12-27 | 2025-06-05 | Aerial vehicle |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2024142308A1 true WO2024142308A1 (ja) | 2024-07-04 |
Family
ID=91716806
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2022/048352 Ceased WO2024142308A1 (ja) | 2022-12-27 | 2022-12-27 | 飛行体 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US12612194B2 (https=) |
| EP (1) | EP4644275A1 (https=) |
| JP (1) | JPWO2024142308A1 (https=) |
| WO (1) | WO2024142308A1 (https=) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| USD1106876S1 (en) * | 2024-11-17 | 2025-12-23 | Shantou chenghai huacai science art industry & trade co., Ltd. | Toy drone |
| USD1113630S1 (en) * | 2024-11-20 | 2026-02-17 | Nunzio La Vecchia | Aircraft |
| USD1112514S1 (en) * | 2025-01-15 | 2026-02-10 | Guangdong Syma Model Aircraft Industrial Co., Ltd. | Toy aircraft |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3934847A (en) * | 1974-10-04 | 1976-01-27 | Bentivegna Pasquale P | Rescue capsule for use with a helicopter |
| JP2010280251A (ja) * | 2009-06-02 | 2010-12-16 | Bin Mamdooh Bin Abdul Aziz Al Saud Naief | ヘリコプターに取り付けられる消火救難ユニット |
| CN107054653A (zh) * | 2017-05-05 | 2017-08-18 | 西安工业大学 | 基于绳牵引的飞行载物机器人及方法 |
| JP2021109467A (ja) | 2020-01-07 | 2021-08-02 | 株式会社マゼックス | 無人飛行体 |
Family Cites Families (58)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| BE663462A (https=) * | 1964-05-13 | 1900-01-01 | ||
| US3598440A (en) * | 1969-03-18 | 1971-08-10 | Fruehauf Corp | Rotatable container-hoisting apparatus |
| US3833189A (en) * | 1971-08-05 | 1974-09-03 | United Aircraft Corp | Load stability system |
| US3829052A (en) * | 1972-05-01 | 1974-08-13 | Kaman Aerospace Corp | Vibration isolator |
| US3838836A (en) * | 1973-08-08 | 1974-10-01 | Calspan Corp | Method and apparatus for load stabilization in heavy lift helicopters |
| US3904156A (en) * | 1974-07-11 | 1975-09-09 | Us Army | External load stabilization apparatus |
| US4500056A (en) * | 1981-03-03 | 1985-02-19 | Della Moretta Leonard B | Aircraft towing and carrying linkage systems having high stability |
| US5826825A (en) * | 1994-04-12 | 1998-10-27 | Gabriel; Edwin Zenith | Automatically actuated cargo and personnel snatching apparatus with distance sensos, magnets and pivot pins for assistance |
| US5465925A (en) * | 1994-05-27 | 1995-11-14 | United Technologies Corporation | Automatic release of a load from a helicopter external cargo suspension system |
| US5593113A (en) * | 1995-02-06 | 1997-01-14 | Cox; Donald P. | Methods and apparatus for selectively attaching and releasing multiple payloads suspended from an aircraft |
| US5562394A (en) * | 1995-04-26 | 1996-10-08 | Brown Paper Converting Machine Works, Inc. | Apparatus and method for inserting and retaining core plugs in paper rolls |
| US5871249A (en) * | 1996-11-12 | 1999-02-16 | Williams; John H. | Stable positioning system for suspended loads |
| US7954766B2 (en) * | 2005-06-24 | 2011-06-07 | Sikorsky Aircraft Corporation | System and method for improved rotary-wing aircraft performance with interior/external loads |
| US20090146010A1 (en) * | 2006-05-11 | 2009-06-11 | Nehemia Cohen | Aerial transport system |
| DE102008025298B4 (de) * | 2008-05-27 | 2010-12-16 | Deutsches Zentrum für Luft- und Raumfahrt e.V. | Verfahren und Vorrichtung zur aktiven Dämpfung von Vertikalschwingungen bei einem Hubschrauber mit angehängter Außenlast |
| DE102009030934A1 (de) * | 2009-06-23 | 2011-01-05 | Matthias Schuster | Lasthebevorrichtung für einen Hubschrauber |
| DE202010002309U1 (de) * | 2010-02-11 | 2010-05-06 | Deutsches Zentrum für Luft- und Raumfahrt e.V. | Reglereinrichtung für Helikopter |
| US9096294B1 (en) * | 2011-06-20 | 2015-08-04 | The United States Of America As Represented By The Secretary Of The Navy | Trolley-payload inter-ship transfer system |
| US8752796B2 (en) * | 2011-09-02 | 2014-06-17 | Sikorsky Aircraft Corporation | Automatic jettison system for a rotorcraft |
| US9079662B1 (en) * | 2012-10-01 | 2015-07-14 | The Boeing Company | Co-operative, modular, unmanned, vertical lift cargo vehicles |
| US9205922B1 (en) * | 2013-07-17 | 2015-12-08 | The Boeing Company | Systems and methods for implementing a payload distribution system |
| PL2944569T3 (pl) * | 2014-05-14 | 2018-01-31 | Airbus Helicopters Deutschland GmbH | Lina masy ładunku zewnętrznego wiropłatu |
| US9422139B1 (en) * | 2014-05-19 | 2016-08-23 | Google Inc. | Method of actively controlling winch swing via modulated uptake and release |
| US9027976B1 (en) * | 2014-06-12 | 2015-05-12 | Donald John Tollenaere | Multi-purpose tactical pendant hook |
| US9718547B2 (en) * | 2014-08-12 | 2017-08-01 | Sikorsky Aircraft Corporation | System and method for determining a length of an external load sling |
| US9174733B1 (en) * | 2014-08-28 | 2015-11-03 | Google Inc. | Payload-release device and operation thereof |
| US9688404B1 (en) * | 2014-12-02 | 2017-06-27 | Amazon Technologies, Inc. | Stabilized airborne drop delivery |
| US9676481B1 (en) * | 2015-03-27 | 2017-06-13 | Amazon Technologies, Inc. | Tether compensated airborne delivery |
| US10676193B2 (en) * | 2015-04-17 | 2020-06-09 | Sikorsky Aircraft Corporation | External load management functions for vertical take-off and landing aircraft |
| US10071804B1 (en) * | 2015-09-28 | 2018-09-11 | Amazon Technologies, Inc. | Delivery drop rate modulation |
| PL3165493T3 (pl) * | 2015-11-06 | 2019-12-31 | Fundación Tecnalia Research & Innovation | Urządzenie i sposób pozycjonowania i orientowania ładunku |
| US10747237B2 (en) * | 2016-07-27 | 2020-08-18 | Kitty Hawk Corporation | Adjusting load on tethered aircraft |
| US10414488B2 (en) * | 2016-09-09 | 2019-09-17 | Wing Aviation Llc | Methods and systems for damping oscillations of a payload |
| US10571365B2 (en) * | 2017-03-03 | 2020-02-25 | Goodrich Corporation | Automatic testing of overload protection device in a rescue hoist |
| EP3630607B1 (en) * | 2017-06-02 | 2022-08-10 | Flirtey Holdings Inc. | Package delivery mechanism |
| WO2018225112A1 (ja) * | 2017-06-04 | 2018-12-13 | 株式会社エアロネクスト | 飛行体 |
| FR3068023B1 (fr) * | 2017-06-23 | 2020-05-15 | Rte Reseau De Transport D’Electricite | Dispositif et procede anti-giratoire de levage, suspension et deplacement d'une charge |
| GB201808075D0 (en) * | 2017-09-13 | 2018-07-04 | Flirtey Holdings Inc | Unmanned aerial vehicle and payload delivery system |
| DE112018006339A5 (de) * | 2017-12-15 | 2020-08-27 | Innotec Lightweight Engineering & Polymer Technology Gmbh | Ladestation und Ladeverbundstation |
| FI12547U1 (fi) * | 2018-02-08 | 2020-01-15 | Vita Inclinata Tech Inc | Kuormanvakautusjärjestelmän laitteisto |
| US11142316B2 (en) * | 2018-02-08 | 2021-10-12 | Vita Inclinata Technologies, Inc. | Control of drone-load system method, system, and apparatus |
| US11209836B1 (en) * | 2018-02-08 | 2021-12-28 | Vita Inclinata Technologies, Inc. | Long line loiter apparatus, system, and method |
| US11649049B2 (en) * | 2018-06-28 | 2023-05-16 | Justin Wesley Green | Unmanned coaxial rotor aerial vehicle for transport of heavy loads |
| US10993569B2 (en) * | 2018-12-06 | 2021-05-04 | United Parcel Service Of America, Inc. | Drone delivery platform to facilitate delivery of parcels by unmanned aerial vehicles |
| EP3790800B1 (en) * | 2019-01-10 | 2023-06-07 | Arrowtec GmbH | Automatic aerial shipping system |
| GB201907302D0 (en) * | 2019-05-23 | 2019-07-10 | Bmt Defence Services Ltd | Delivery system |
| FR3100531B1 (fr) * | 2019-09-09 | 2021-12-10 | Safran Electronics & Defense | Station automatique d’avitaillement d’un véhicule autonome aérien |
| WO2021225651A2 (en) * | 2020-02-06 | 2021-11-11 | Suppes Galen J | Flat plate airfoil platform vehicle |
| US11858637B2 (en) * | 2020-02-07 | 2024-01-02 | The Boeing Company | Unmanned aerial vehicle and cargo attachment system for the unmanned aerial vehicle |
| JP6952380B1 (ja) * | 2020-08-11 | 2021-10-20 | 株式会社エアロネクスト | 移動体 |
| US12054252B2 (en) * | 2020-11-06 | 2024-08-06 | Yana SOS, Inc. | Flight-enabled signal beacon |
| EP4393819A4 (en) * | 2021-08-23 | 2025-07-30 | Aeronext Inc | Flying object |
| US11608252B1 (en) * | 2022-02-15 | 2023-03-21 | Innovative Minds, LLC | Damper systems for suspended loads |
| US20230257236A1 (en) * | 2022-02-15 | 2023-08-17 | Innovative Minds, LLC | Damper systems for suspended loads |
| WO2023162405A1 (ja) * | 2022-02-22 | 2023-08-31 | 日本国土開発株式会社 | 移動装置および無人飛行装置 |
| US12283193B2 (en) * | 2022-09-13 | 2025-04-22 | Lockheed Martin Corporation | Helicopter obstacle avoidance with slung load |
| JP2024045971A (ja) * | 2022-09-22 | 2024-04-03 | 株式会社ダイフク | 搬送システム |
| JP7794095B2 (ja) * | 2022-09-22 | 2026-01-06 | 株式会社ダイフク | 無人航空機の搬送システム |
-
2022
- 2022-12-27 JP JP2024567084A patent/JPWO2024142308A1/ja active Pending
- 2022-12-27 EP EP22970097.6A patent/EP4644275A1/en active Pending
- 2022-12-27 WO PCT/JP2022/048352 patent/WO2024142308A1/ja not_active Ceased
-
2025
- 2025-06-05 US US19/229,070 patent/US12612194B2/en active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3934847A (en) * | 1974-10-04 | 1976-01-27 | Bentivegna Pasquale P | Rescue capsule for use with a helicopter |
| JP2010280251A (ja) * | 2009-06-02 | 2010-12-16 | Bin Mamdooh Bin Abdul Aziz Al Saud Naief | ヘリコプターに取り付けられる消火救難ユニット |
| CN107054653A (zh) * | 2017-05-05 | 2017-08-18 | 西安工业大学 | 基于绳牵引的飞行载物机器人及方法 |
| JP2021109467A (ja) | 2020-01-07 | 2021-08-02 | 株式会社マゼックス | 無人飛行体 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP4644275A1 |
Also Published As
| Publication number | Publication date |
|---|---|
| US12612194B2 (en) | 2026-04-28 |
| US20250296711A1 (en) | 2025-09-25 |
| EP4644275A1 (en) | 2025-11-05 |
| JPWO2024142308A1 (https=) | 2024-07-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2024142308A1 (ja) | 飛行体 | |
| CN108502152B (zh) | 具有机体和推力产生单元装置的多旋翼飞行器 | |
| US6575401B1 (en) | Vertical-lift and horizontal flight aircraft | |
| JP6453527B1 (ja) | 同軸ツインプロペラツインモータ飛行体 | |
| JPWO2024142308A5 (https=) | ||
| WO2019165930A1 (zh) | 一种双环形旋翼球形舱飞机 | |
| US20150225078A1 (en) | Rotor drive system | |
| US20220236745A1 (en) | Drone and method for controlling the attitude thereof | |
| US20130092789A1 (en) | Hybrid drive for helicopters | |
| RU2441809C2 (ru) | Способ управления беспилотным привязным летательным аппаратом и беспилотный авиационный комплекс | |
| WO2006006311A1 (ja) | 急速風量発生風向変更装置及びそれを機体側面に取り付けた航空機 | |
| CN111542474A (zh) | 模块化飞行器 | |
| CN116101492B (zh) | 一种无人直升机吊挂主动增稳装置及其工作方法 | |
| KR20210048534A (ko) | 전자기 자이로스코픽 안정화 추진 시스템 방법 및 장치 | |
| WO2017126584A1 (ja) | 無人航空機 | |
| EP3986786A1 (en) | Drone and method for controlling the attitude thereof | |
| KR102906094B1 (ko) | 이착륙장치를 구비하는 드론 | |
| JP2020083209A (ja) | 無人飛行体 | |
| WO2024142309A1 (ja) | 飛行体 | |
| WO2024142267A1 (ja) | 飛行体 | |
| CN112236360A (zh) | 电子部件及安装有该电子部件的飞行体 | |
| US8561936B2 (en) | Hang glider electric propulsion system and method | |
| KR20190057211A (ko) | 하이브리드 드론 및 그의 제어방법 | |
| CN113226926A (zh) | 有效载荷控制装置 | |
| JP6398145B2 (ja) | 無人航空機およびその保管方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 22970097 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2024567084 Country of ref document: JP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2022970097 Country of ref document: EP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2022970097 Country of ref document: EP Effective date: 20250728 |
|
| ENP | Entry into the national phase |
Ref document number: 2022970097 Country of ref document: EP Effective date: 20250728 |
|
| WWP | Wipo information: published in national office |
Ref document number: 2022970097 Country of ref document: EP |