WO2024116364A1 - 運転支援装置、車両、コンピュータプログラムを記録した記録媒体及び運転支援方法 - Google Patents
運転支援装置、車両、コンピュータプログラムを記録した記録媒体及び運転支援方法 Download PDFInfo
- Publication number
- WO2024116364A1 WO2024116364A1 PCT/JP2022/044340 JP2022044340W WO2024116364A1 WO 2024116364 A1 WO2024116364 A1 WO 2024116364A1 JP 2022044340 W JP2022044340 W JP 2022044340W WO 2024116364 A1 WO2024116364 A1 WO 2024116364A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- speed
- vehicle
- host vehicle
- driving assistance
- specific point
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images










Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/09—Taking automatic action to avoid collision, e.g. braking and steering
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/14—Adaptive cruise control
- B60W30/143—Speed control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/14—Adaptive cruise control
- B60W30/16—Control of distance between vehicles, e.g. keeping a distance to preceding vehicle
- B60W30/162—Speed limiting therefor
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W2050/146—Display means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/40—Dynamic objects, e.g. animals, windblown objects
- B60W2554/404—Characteristics
- B60W2554/4041—Position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
- B60W2554/804—Relative longitudinal speed
Definitions
- This disclosure relates to a driving assistance device, a vehicle, a recording medium having a computer program recorded thereon, and a driving assistance method.
- One such driving assistance technology is a system that informs the driver of the risk of collision with moving objects that may appear in the driver's blind spot, allowing the driver to drive the vehicle safely.
- one such system provides not only a recommended vehicle speed but also a profile that specifies the speed change required to reach the recommended speed in order to avoid contact with a predicted moving object (e.g., Patent Document 1).
- Patent Document 1 simply provides a recommended speed, and if the driver deviates from the profile, not only is it unable to provide appropriate driving assistance, but it is also unable to reduce the risk of collision with moving objects.
- This disclosure has been made in consideration of the above problems, and the purpose of this disclosure is to provide a driving assistance device that can make the driver aware of the risk of collision with a virtual object that may jump out of the blind spot.
- Another object of the present disclosure is to provide a driving assistance device that can guide the vehicle's speed to a safer speed by making the driver aware of the risk of collision with a virtual object, thereby reducing the risk of collision around the blind spot.
- a driving assistance device includes: A driving assistance device that assists driving of a vehicle, one or more processors; and one or more memories communicatively coupled to the one or more processors; the one or more processors: A position and a moving speed of a virtual object that may appear from a blind spot area in the traveling direction of the host vehicle are set.
- a specific point identification process for identifying a point where a traveling direction of the vehicle and a traveling direction of the virtual object intersect as a specific point; executing an upper limit speed setting process for setting, as an upper limit speed, an upper limit speed at which the host vehicle will decelerate and reach, and at which contact between the host vehicle and the virtual object at the specific point can be avoided; execute a speed change plan setting process to set one or more speed change plans in which a speed change of the host vehicle from a current position of the host vehicle to the specific point is defined, the speed change plans being for passing the specific point at a speed less than the upper limit speed based on the current position of the host vehicle, the distance from the current position to the specific point, the current speed of the host vehicle, and the upper limit speed;
- a visualization control process is executed to visualize the virtual object so as to make the driver aware of a risk of collision between the host vehicle and the virtual object.
- a vehicle includes: In a vehicle equipped with a driving assistance device that assists driving, The driving assistance device sets a position and a moving speed of a virtual object that may jump out from a blind spot area existing in a traveling direction of the vehicle, execute a specific point identification process for identifying a point where a traveling direction of the vehicle and a traveling direction of the virtual object intersect as a specific point; executing an upper limit speed setting process for setting, as an upper limit speed, an upper limit speed at which the host vehicle will decelerate and reach, and at which contact between the host vehicle and the virtual object at the specific point can be avoided; execute a speed change plan setting process to set one or more speed change plans in which a speed change of the host vehicle from a current position of the host vehicle to the specific point is defined, the speed change plans being for passing the specific point at a speed less than the upper limit speed based on the current position of the host vehicle, the distance from the current position to the specific point, the current speed of
- a recording medium having a computer program according to a third aspect of the present disclosure recorded thereon comprises: A recording medium having a computer program applied to a driving assistance device that assists driving of a vehicle, On the computer, A means for setting a position and a moving speed of a virtual object that may appear from a blind spot area present in the traveling direction of the host vehicle; a means for executing a specific point identification process for identifying a point where the traveling direction of the host vehicle and the traveling direction of the virtual object intersect as a specific point; a means for executing an upper limit speed setting process for setting, as an upper limit speed, an upper limit speed at which the host vehicle will decelerate and reach, and at which contact between the host vehicle and the virtual object at the specific point can be avoided; a means for executing a speed change plan setting process for setting one or more speed change plans in which a speed change of the vehicle from a current position of the vehicle to the specific point is specified, the speed change plan being set based on the current position of the vehicle,
- a driving assistance method for assisting driving of a vehicle, comprising: A position and a moving speed of a virtual object that may jump out from a blind spot area present in the traveling direction of the host vehicle are set, execute a specific point identification process for identifying a point where a traveling direction of the vehicle and a traveling direction of the virtual object intersect as a specific point; executing an upper limit speed setting process for setting, as an upper limit speed, an upper limit speed at which the host vehicle will decelerate and reach, and at which contact between the host vehicle and the virtual object at the specific point can be avoided; execute a speed change plan setting process to set one or more speed change plans in which a speed change of the host vehicle from a current position of the host vehicle to the specific point is defined, the speed change plans being for passing the specific point at a speed less than the upper limit speed based on the current position of the host vehicle, the distance from the current position to the specific point, the current speed of the
- the driving assistance device disclosed herein can make the driver aware of the risk of collision with an object that may jump out of the blind spot and can guide the vehicle's speed to a safer speed, thereby reducing the risk of collision around the blind spot.
- FIG. 1 is an example of a system configuration diagram showing a configuration of a vehicle control system mounted on a vehicle according to an embodiment of the present disclosure.
- 1 is a schematic diagram illustrating an example of the configuration of a vehicle equipped with a vehicle control system according to an embodiment
- 1 is a diagram for explaining a driving assistance control process based on a collision risk with a jumping object, which is executed in a vehicle control system according to one embodiment.
- FIG. 11A to 11C are diagrams for explaining a pop-out object setting process including a specific point identification process executed in a vehicle control system according to one embodiment.
- FIG. 4 is a diagram for explaining an upper limit speed setting process executed in the vehicle control system of the embodiment.
- FIG. 2 is a diagram for explaining a visualization control process executed in the vehicle control system of one embodiment.
- FIG. 2 is a diagram for explaining a visualization control process executed in the vehicle control system of one embodiment.
- FIG. 2 is a diagram for explaining a visualization control process executed in the vehicle control system of one embodiment.
- FIG. 2 is a diagram for explaining a visualization control process executed in the vehicle control system of one embodiment.
- 1 is a flowchart showing the operation of a driving assistance control process based on a collision risk with a jumping object, which is executed by a driving assistance control device according to one embodiment.
- 1 is a flowchart showing the operation of a driving assistance control process based on a collision risk with a jumping object, which is executed by a driving assistance control device according to one embodiment.
- 13A and 13B are diagrams for explaining intermittent display of a pop-out object as Modification 1.
- FIG. 1 is a flowchart showing the operation of a driving assistance control process based on a collision risk with a jumping object, which is executed by a driving assistance control device according to one embodiment.
- 13A and 13B are diagrams
- a driving assistance device includes: A driving assistance device that assists driving of a vehicle, one or more processors; and one or more memories communicatively coupled to the one or more processors; the one or more processors: A position and a moving speed of a virtual object that may jump out from a blind spot area present in the traveling direction of the host vehicle are set, execute a specific point identification process for identifying a point where a traveling direction of the vehicle and a traveling direction of the virtual object intersect as a specific point; executing an upper limit speed setting process for setting, as an upper limit speed, an upper limit speed at which the host vehicle will decelerate and reach, and at which contact between the host vehicle and the virtual object at the specific point can be avoided; execute a speed change plan setting process to set one or more speed change plans in which a speed change of the host vehicle from a current position of the host vehicle to the specific point is defined, the speed change plans being for passing the specific point at a speed less than the upper limit
- the embodiments of the present disclosure can also be realized by a driving assistance control device mounted on a vehicle that executes each of the above processes, a recording medium that records a computer program for executing each of the above processes, or a driving assistance method that executes each of the above processes.
- the driving assistance device disclosed herein can provide the driver with visualized information on the risk of collision with a virtual object at a specific point in response to the change in speed of the vehicle when the vehicle's speed deviates from the set speed change plan.
- the driving assistance device disclosed herein can provide the driver with visual feedback of the possibility of a collision risk between the vehicle and a virtual object in response to the speed change of the vehicle.
- the driving assistance device disclosed herein can make the driver aware of the risk of collision with an object that may jump out of the blind spot area and reliably guide the driver to a speed that will avoid a collision with a virtual object, thereby reducing the risk of collision around the blind spot area.
- virtual objects include, for example, other vehicles such as cars or bicycles, and pedestrians.
- the "position and movement speed of a virtual object" is something that is assumed in advance, and can be estimated, for example, from the position and speed of the vehicle itself.
- a speed change plan that specifies the speed change of the vehicle up to a specific point refers to the trajectory of the speed change of the vehicle that is determined according to the distance from the position of the vehicle to the specific point.
- a speed that is considered to be the same as the speed specified in the speed change plan a speed within a specified range, or an average speed over a certain period of time, etc.
- Visualizing a virtual object refers to presenting visualization information of a virtual object in a manner that is virtually visible to the driver by various methods.
- the various methods refer to imaging the virtual object in real space, on map data, on an image of the real space, or in association with an image that mimics the real space.
- imaging a virtual object in relation to real space includes displaying the virtual object on a transparent object such as a windshield or glasses when the driver is viewing the direction of travel through the transparent object.
- this includes superimposing visualization information of the virtual object on a display area in which a blind spot area is formed on the map data.
- imaging a virtual object in association with an image generated by capturing an image of real space this includes superimposing an image of the virtual object in association with a blind spot in an image of the surrounding environment captured by a front camera mounted on the vehicle.
- imaging a virtual object in association with an image that mimics real space includes imaging a virtual object by superimposing it on a simplified image of real space displayed on the center information display or the meter display on the steering column.
- the driving assistance device includes: The one or more processors, as the visualization control process, a speed of the host vehicle is determined to be greater than a speed defined by the one or more speed change plans; a determination that the speed of the host vehicle matches a speed defined by the one or more speed change plans; a speed of the host vehicle is determined to be slower than a speed defined by the one or more speed change plans; The method includes changing the way the virtual object is visualized.
- the driving assistance device disclosed herein can change the visualization method depending on the possibility of a collision with a virtual object at a specific location, allowing the driver to accurately recognize the risk of collision.
- the driving assistance device includes: the one or more processors: When the speed of the host vehicle is slower than the speed defined by the one or more speed change plans, the visualization control process is stopped.
- the driving assistance device disclosed herein can determine that there is no longer a risk of collision with the virtual object when the vehicle's speed becomes slower than the speed specified in the speed change plan, and can stop providing unnecessary information.
- the driving assistance device disclosed herein can limit the information that the driver needs to focus on, providing an environment for more reliable and safe driving.
- the visualization control process has a configuration of intermittently visualizing the virtual object in association with a real space, or intermittently visualizing the virtual object on map data.
- the driving assistance device etc. disclosed herein can make the driver recognize the visualized virtual object so that the virtual object is present at the position at the time of collision with the host vehicle at the planned collision point for each intermittent display. Therefore, the driving assistance device etc. disclosed herein can more reliably make the driver recognize a virtual object that is present in the driver's blind spot.
- FIG. 1 is an example of a system configuration diagram showing the configuration of a vehicle control system 10 that is mounted on the vehicle M of this embodiment and has a driving assistance control device 100.
- the vehicle control system 10 is a device installed in the host vehicle M, and is a system that provides driving assistance to drive the host vehicle M automatically in an automatic driving mode, or to assist the driver in driving the host vehicle M while the driver is driving the vehicle M in a manual driving mode.
- the vehicle control system 10 of this embodiment has a configuration for executing processing related to guidance displays for guiding the speed of the vehicle M to a specific speed during driving assistance control for assisting the driver while driving (hereinafter also referred to as "manual driving assistance control").
- the vehicle control system 10 includes a vehicle operation/behavior sensor 27, a Global Navigation Satellite System (GNSS) antenna 29, an exterior camera 31, and an ambient environment sensor 32.
- GNSS Global Navigation Satellite System
- the vehicle control system 10 also includes a map data storage unit 33, an HMI (Human Machine Interface) 43, a vehicle drive control unit 40, and a driving assistance control device 100 that executes control to assist the driver in driving the vehicle M.
- a map data storage unit 33 an HMI (Human Machine Interface) 43
- a vehicle drive control unit 40 a vehicle drive control unit 40
- a driving assistance control device 100 that executes control to assist the driver in driving the vehicle M.
- the vehicle operation/behavior sensor 27 and the GNSS antenna 29 are each directly connected to the driving assistance control device 100.
- the exterior camera 31, the surrounding environment sensor 32, the map data storage unit 33, the HMI 43, and the vehicle drive control unit 40 are also each directly connected to the driving assistance control device 100.
- CAN Controller Area Network
- LIN Local Inter Net
- the vehicle operation/behavior sensor 27 is composed of at least one sensor that detects the operation state and behavior of the vehicle.
- the vehicle operation/behavior sensor 27 has at least one of a vehicle speed sensor, an acceleration sensor, and an angular velocity sensor, and detects information on the vehicle behavior, such as vehicle speed, longitudinal acceleration, lateral acceleration, and yaw rate.
- the vehicle operation/behavior sensor 27 has at least one of an accelerator position sensor, a brake stroke sensor, a brake pressure sensor, a steering angle sensor, an engine speed sensor, a brake lamp switch, and a blinker switch.
- the vehicle operation/behavior sensor 27 detects information on the vehicle's operation state, such as the steering angle of the steering wheel or steering wheels, accelerator opening, brake operation amount, brake lamp switch on/off, and blinker switch on/off.
- the vehicle operation/behavior sensor 27 has a driving mode changeover switch and detects the setting information of the autonomous driving mode.
- the vehicle operation/behavior sensor 27 transmits a sensor signal including the detected information to the driving assistance control device 100.
- the GNSS antenna 29 receives satellite signals from satellites such as GPS (Global Positioning System) satellites.
- GPS Global Positioning System
- the GNSS antenna 29 transmits the vehicle's location information on the map data contained in the received satellite signal to the driving assistance control device 100.
- an antenna may be provided that receives satellite signals from other satellite systems that identify the vehicle's position.
- the exterior imaging camera 31 is a camera for acquiring information about the surrounding environment of the host vehicle M, and is composed of front imaging cameras 31LF, 31RF and a rear imaging camera 31R.
- the front imaging cameras 31LF, 31RF and the rear imaging camera 31R are equipped with imaging elements such as CCD (Charged-Coupled Devices) or CMOS (Complementary Metal-Oxide-Semiconductor).
- CCD Charge-Coupled Devices
- CMOS Complementary Metal-Oxide-Semiconductor
- the front imaging cameras 31LF, 31RF and rear imaging camera 31R capture images of the front or rear of the vehicle M to generate image data, and provide the generated image data to the driving assistance control device 100.
- the front photographing cameras 31LF, 31RF are configured as stereo cameras including a pair of left and right cameras, and the rear photographing camera 31R is configured as a so-called monocular camera, but each may be either a stereo camera or a monocular camera.
- cameras mounted on the side mirrors 11L, 11R to photograph the left rear or right rear may be provided.
- the surrounding environment sensor 32 is a sensor that detects people or obstacles around the host vehicle M.
- the surrounding environment sensor 32 has one or more sensors selected from the group consisting of a high-frequency radar sensor, an ultrasonic sensor, and a LiDAR sensor.
- the surrounding environment sensor 32 has the function of detecting any objects present around the vehicle M, such as other vehicles or bicycles, buildings, utility poles, traffic signs, traffic signals, natural objects, or other obstacles.
- the surrounding environment sensor 32 transmits a sensor signal including the detected data to the driving assistance control device 100.
- the map data storage unit 33 is composed of a storage device such as a memory element, a magnetic disk, an optical disk, or a flash memory, and is a storage medium in which map data is stored.
- a RAM Random Access Memory
- a ROM Read Only Memory
- HDD Hard Disk Drive
- CDs Compact Discs
- DVDs Digital Versatile Discs
- flash memory SSDs (Solid State Drives) or USB (Universal Serial Bus) memory are used.
- map data in this embodiment includes data on reference paths, which are the trajectories that serve as a reference when traveling on each road.
- the map data storage unit 33 in this embodiment may be a storage medium that stores map data for a navigation system (not shown) that assists the driver and guides the vehicle M to a destination.
- the HMI 43 is driven by the driving assistance control device 100 and has a function of notifying the driver of various information by means of image display, audio output, or the like.
- the HMI 43 includes a display device and a speaker (not shown) provided in the instrument panel.
- the display device may be a display device of a navigation system.
- the HMI 43 may also have the function of a HUD (head-up display) that displays information on the windshield, superimposed on the scenery around the vehicle.
- HUD head-up display
- the vehicle drive control unit 40 has at least one control system that controls the drive of the host vehicle M.
- the vehicle drive control unit 40 has an engine control system or a motor control system that controls the driving force of the vehicle, a steering wheel, an electric steering system that controls the steering angle of the steering wheels, or a brake system that controls the braking force of the vehicle.
- the vehicle drive control unit 40 may also have a transmission system that changes the speed of the output from the engine or drive motor and transmits it to the drive wheels.
- the vehicle drive control unit 40 executes control for driving assistance during automatic driving or manual driving based on the set driving conditions.
- the vehicle drive control unit 40 controls the engine control system or motor control system, the steering wheel, the electric steering system that controls the steering angle of the steering wheels, or the brake system that controls the braking force of the vehicle based on the set driving conditions.
- the driving assistance control device 100 receives various data, such as image data transmitted from each of the exterior vehicle cameras 31 described above, and data on the operation state and behavior of the host vehicle M transmitted from the vehicle operation/behavior sensor 27 .
- the driving assistance control device 100 also receives information on the vehicle's position on map data transmitted from the GNSS antenna 29 (hereinafter referred to as "position information").
- the driving assistance control device 100 executes control for automatic driving of the vehicle M (i.e., automatic driving control), or driving assistance control to assist the driver in driving the vehicle M.
- control for automatic driving of the vehicle M i.e., automatic driving control
- driving assistance control to assist the driver in driving the vehicle M.
- the driving assistance control device 100 is configured to perform driving assistance control by anticipating the occurrence of an object such as a pedestrian jumping out of a blind spot area recognized in the direction of travel, and to associate the object with the blind spot area and visualize it, or display it on the map data.
- an object such as a pedestrian jumping out of a blind spot area recognized in the direction of travel
- FIG. 2 is an example of a system configuration diagram showing the configuration of a vehicle control system 10 that is mounted on the vehicle M of this embodiment and has a driving assistance control device 100.
- the host vehicle M has a driving force source 9 that generates a driving torque for the host vehicle M, and is configured to transmit the driving torque output from the driving force source 9 to the wheels 3.
- the vehicle M is equipped with an electric steering device 15 and brake devices 17LF, 17RF, 17LR, and 17RR (hereinafter, collectively referred to as “brake devices 17" unless a distinction is required) as devices used to control the driving of the vehicle M.
- brake devices 17 hereinafter, collectively referred to as “brake devices 17" unless a distinction is required
- the host vehicle M is configured as a four-wheel drive vehicle that transmits drive torque to the left front wheel 3LF, the right front wheel 3RF, the left rear wheel 3LR, and the right rear wheel 3RR.
- the host vehicle M may be, for example, an electric vehicle equipped with two drive motors, a front-wheel drive motor and a rear-wheel drive motor, or an electric vehicle equipped with drive motors corresponding to each of the wheels 3.
- the vehicle M is an electric vehicle or a hybrid electric vehicle
- the vehicle M is equipped with a secondary battery that stores the power supplied to the drive motor, or a generator such as a motor or fuel cell that generates power to charge the battery.
- the drive power source 9 outputs a drive torque that is transmitted to the front drive shaft 5F and the rear drive shaft 5R via a transmission (not shown) and the front differential mechanism 7F and the rear differential mechanism 7R.
- the driving force source 9 may be an internal combustion engine such as a gasoline engine or a diesel engine, a driving motor, or may include both an internal combustion engine and a driving motor.
- the drive of the drive power source 9 and the transmission is controlled by a vehicle drive control unit 40 that includes one or more electronic control units (ECUs: Electronic Control Units).
- ECUs Electronic Control Units
- Brake devices 17LF, 17RF, 17LR, and 17RR apply braking force to the front left wheel 3LF, front right wheel 3RF, rear left wheel 3LR, and rear right wheel 3RR, which are the front, rear, and left and right drive wheels, respectively.
- the brake devices 17 are configured, for example, as hydraulic brake devices, and the hydraulic pressure supplied to each brake device 17 is controlled by the vehicle drive control unit 40 to generate a predetermined braking force.
- the vehicle drive control unit 40 controls the electric steering device 15 based on the steering angle of the steering wheel 13 by the driver during manual driving, and controls the electric steering device 15 based on the set driving trajectory during automatic driving control.
- the front wheel drive shaft 5F is provided with an electric steering device 15 including an electric motor and a gear mechanism (not shown), and the electric steering device 15 is controlled by the vehicle drive control unit 40 to adjust the steering angle of the left front wheel 3LF and the right front wheel 3RF.
- the vehicle drive control unit 40 also includes one or more electronic control devices that control the drive of the drive power source 9, the electric steering device 15, and the brake device 17, and has the function of controlling the drive of the transmission that changes the speed of the output from the drive power source 9 and transmits it to the wheels 3 as necessary.
- the vehicle drive control unit 40 is configured to be able to acquire information transmitted from the driving assistance control device 100, and is configured to be able to execute automatic driving control of the host vehicle M.
- the brake device 17 is used in conjunction with regenerative braking by the drive motor.
- the host vehicle M is equipped with an exterior camera 31 consisting of front cameras 31LF, 31RF and a rear camera 31R, and a surrounding environment sensor 32.
- the host vehicle M is also equipped with an operation/behavior sensor 27, a GNSS antenna 29, and an HMI (Human Machine Interface) 43 for acquiring information on the surrounding environment of the host vehicle M.
- HMI Human Machine Interface
- the front photographing cameras 31LF, 31RF and the rear photographing camera 31R photograph the area in front of or behind the vehicle M and generate image data.
- the front photographing cameras 31LF, 31RF are configured as a stereo camera including a pair of left and right cameras
- the rear photographing camera 31R is configured as a so-called monocular camera.
- the front photographing cameras 31LF, 31RF and the rear photographing camera 31R may each be either a stereo camera or a monocular camera.
- the rear photographing camera 31R may be omitted.
- the driving assistance control device 100 has one or more processors such as a CPU (Central Processing Unit) or an MPU (Micro Processing Unit).
- processors such as a CPU (Central Processing Unit) or an MPU (Micro Processing Unit).
- a part or the whole of the driving assistance control device 100 may be configured with updatable firmware or the like, or may be a program module executed by commands from a CPU or the like.
- the driving assistance control device 100 executes a computer program to perform automatic driving control that reduces the risk of collision between the vehicle M, which is the target of driving assistance, and an obstacle that occurs in or around the blind spot area.
- the driving assistance control device 100 has a processing unit 110, a storage unit 140, an information storage medium 150, and a communication unit 170. Note that some of these may be omitted.
- the processing unit 110 performs various processes of this embodiment by reading and executing application programs (hereinafter also referred to as "apps") stored in the information storage medium 150.
- apps application programs
- the type of app to be stored in the information storage medium 150 is arbitrary.
- the processing unit 110 of this embodiment may read out a program or data stored in the information storage medium 150, temporarily store the read out program or data in the storage unit 140, and perform processing based on the program or data.
- the processing unit 110 performs various processes using the main memory unit 141 in the memory unit 140 as a work area.
- the functions of the processing unit 110 are realized by hardware such as various processors (CPU, DSP, etc.) or application programs.
- the processing unit 110 is composed of a communication control unit 111, a surrounding environment detection unit 112, a vehicle data acquisition unit 113, a driving assistance control unit 116, and a notification control unit 117. Note that some of these units may be omitted.
- the communication control unit 111 performs processing to send and receive data to and from a management server (not shown) and other vehicles.
- the communication control unit 111 controls the communication unit 170 and executes network communications including vehicle-to-vehicle communications, road-to-vehicle communications, and mobile communications networks.
- the surrounding environment detection unit 112 detects information about the surrounding environment of the vehicle based on image data sent from the exterior camera 31 and data sent from the surrounding environment sensor 32.
- the surrounding environment detection unit 112 then processes the image data sent from the exterior camera 31, and uses object detection technology to identify people, other vehicles, bicycles, buildings, natural objects, and other obstacles that are present around the vehicle M.
- the surrounding environment detection unit 112 also identifies various blind spot areas that are blind spots for the driver, such as blind spot areas formed due to obstacles around the identified vehicle M.
- the surrounding environment detection unit 112 calculates the positions of objects that form each obstacle relative to the vehicle M, or the distance and relative speed between the vehicle M and these objects.
- the surrounding environment detection unit 112 then stores the detected data on obstacles and blind spots around the vehicle M in the memory unit 140 as time-series data.
- the surrounding environment detection unit 112 may identify blind spots based on various information transmitted from devices outside the vehicle via V2X communication or the like.
- the blind spots are identified according to the position, type, and size of an obstacle.
- the surrounding environment detection unit 112 may also identify the current position of the vehicle M on the map data (hereinafter referred to as the "current position") using the position information of the vehicle M acquired by the GNSS antenna 29, and identify blind spot areas based on the information of obstacles around the vehicle M.
- the vehicle data acquisition unit 113 acquires data on the operation state and behavior of the host vehicle M based on the sensor signal transmitted from the vehicle operation/behavior sensor 27.
- data on the operation state and behavior of the vehicle M includes data on the vehicle speed, longitudinal acceleration, lateral acceleration, yaw rate, steering wheel or steering wheel angle, accelerator opening, brake operation amount, brake lamp switch on/off, and blinker switch on/off.
- the data on the operation state and behavior of the vehicle M includes data on whether the autonomous driving mode of the vehicle M is on or off.
- the vehicle data acquisition unit 113 stores the acquired data on the operation state and behavior of the vehicle M in the storage unit 140 as time-series data.
- the driving assistance control unit 116 executes control processing related to driving assistance (hereinafter also referred to as “driving assistance control processing") to drive the vehicle M automatically and safely in the autonomous driving mode, or to assist the driver in driving the vehicle M in the manual driving mode.
- driving assistance control processing control processing related to driving assistance
- the driving assistance control unit 116 of this embodiment works in conjunction with the notification control unit 117 to execute driving assistance control processing to assist the driver in driving the vehicle M in a manual driving mode in which the driver performs driving operations himself/herself.
- the driving assistance control unit 116 makes the driver aware of the risk of collision with a virtual object that jumps out of the blind spot (hereinafter referred to as a "jumping object”), and executes driving assistance control processing to ensure safe driving by the driver.
- a virtual object that jumps out of the blind spot hereinafter referred to as a "jumping object”.
- the driving assistance control unit 116 also performs a driving assistance control process to guide the driver's driving behavior with respect to various operations such as accelerator operation, steering operation, and braking operation in order to reduce or eliminate the risk of collision with a sudden object.
- the notification control unit 117 controls the operation of the HMI 43 to provide information to the driver to guide the above driving behavior.
- the notification control unit 117 executes a visualization control process to visualize objects that may appear from blind spots in relation to real space, or to display them on map data.
- the memory unit 140 serves as a work area for the processing unit 110 and other devices, and its functions are realized by hardware such as RAM (VRAM).
- VRAM RAM
- the memory unit 140 of this embodiment includes a main memory unit 141 that is used as a work area, and a data memory unit 142 that stores data used when executing each process. Note that some of these may be omitted.
- the data storage unit 142 stores computer programs, table data, risk distribution data, as well as standard data and reference data for performing various types of processing.
- the computer program is intended to cause the processor to execute various operations that should be executed by the driving assistance control device 100, and may be recorded on a recording medium built into the driving assistance control device 100 or on any recording medium that can be attached externally to the driving assistance control device 100.
- the information storage medium 150 is computer-readable, and may store various applications and various data such as an OS (operating system).
- the information storage medium 150 may be composed of a memory element, a magnetic disk, an optical disk, or a flash memory.
- the communication unit 170 performs various controls for communicating with external devices (not shown), and its functions are realized by hardware such as various processors or communication ASICs, computer programs, etc.
- FIG. 3 is a diagram for explaining the driving assistance control process based on the risk of collision with a jumping object, which is executed in the vehicle control system 10 of this embodiment.
- the driving assistance control device 100 of this embodiment has a configuration that executes driving assistance control processing to make the driver aware of the risk of collision between the vehicle M and a jumping object, which indicates a virtual moving object that may jump out of a blind spot area such as a pedestrian, and thereby ensure safe driving by the driver.
- the driving assistance control device 100 is configured to identify a specific point where an object OB may jump out from a blind spot area, and to set a speed change plan that specifies the speed change of the vehicle M according to the distance L from the current position of the vehicle M to the specific point.
- the driving assistance control device 100 is configured to provide the driver with the position and movement speed of the object OB predicted in association with the speed of the vehicle M in order to guide the speed of the vehicle M to the speed specified in the speed change plan.
- the driving assistance control device 100 is configured to be able to provide the driver with visual information on the possibility of a collision risk between the vehicle M and the object OB that is about to jump out if the speed of the vehicle M deviates from the set speed change plan.
- the driving assistance control device 100 when the driving assistance control device 100 detects a blind spot area in the traveling direction of the vehicle M, it is configured to execute a process for setting an object that may jump out from the blind spot area, and to set the position and moving speed of an object that may jump out from the blind spot area (FIGS. 3[1] and [2]).
- the driving assistance control device 100 is also configured to execute a specific point identification process that identifies a point where the traveling direction of the vehicle M intersects with the traveling direction of the object OB as a specific point ( Figure 3 [3]).
- the driving assistance control device 100 is configured to execute an upper speed limit setting process that sets the upper speed limit to the speed at which the vehicle M decelerates and can avoid contact between the vehicle M and the object OB that is about to jump out at a specific point ( Figure 3 [4]).
- the driving assistance control device 100 is configured to execute a speed change plan setting process that sets a speed change plan for passing a specific point at a speed less than the upper limit speed, in which the speed change of the vehicle M from the current position of the vehicle M to the specific point is specified ( Figure 3 [5]).
- the driving assistance control device 100 is configured to set one or more speed change plans based on the current position of the vehicle M, the distance L from the current position to a specific point, and the current speed and upper limit speed of the vehicle M as a speed change plan setting process.
- the driving assistance control device 100 is configured to execute a visualization control process to make the driver aware of the risk of collision between the vehicle M and the object OB when the speed of the vehicle M is determined to be faster than the speed specified in the speed change plan ( Figure 3 [6]).
- the driving assistance control device 100 has a configuration for visualizing the object OB jumping out in real space or in association with map data, so as to make the driver aware of the risk of collision between the vehicle M and the object OB jumping out.
- the pop-out object OB which is a virtual object, refers to, for example, other vehicles such as cars or bicycles, and pedestrians.
- FIG. 3 also shows an example in which, when a blind spot area is detected in the traveling direction of the vehicle M, and an object OB is set and a specific point is identified, the upper limit speed setting process and the speed change plan setting process are executed according to the distance L from the current position to the specific point.
- FIG. 3 shows an example of a visualization control process for making the driver aware of the risk of collision between the vehicle M and a sudden object OB when the speed of the vehicle M is determined to be faster than the speed specified in the speed change plan.
- the visualization process in Figure 3 shows an example in which the display of the pop-out object OB is changed from Display 1 to Display 2, and the movement speed (expressed by the shape) and position of the pop-out object OB are changed.
- the driving assistance control device 100 can provide the driver with visualized information on the risk of collision with the virtual object at a specific point in accordance with the speed change of the vehicle M.
- the driving assistance control device 100 can therefore make the driver aware of the risk of collision with an object that may jump out of the blind spot, while guiding the driver to a speed that will avoid a collision with a virtual object, thereby reducing the risk of a collision around the blind spot.
- the surrounding environment detection unit 112 detects information about various blind spots (hereinafter referred to as "blind spot related information") based on data transmitted from the exterior camera 31 and the surrounding environment sensor 32.
- the surrounding environment detection unit 112 detects blind spot related information, such as the road type corresponding to the identified position, including the position of the blind spot from the current position of the vehicle M, based on the data transmitted from the exterior camera 31 and the surrounding environment sensor 32.
- the surrounding environment detection unit 112 detects blind spot area-related information such as the type, position, and size of the blind spot area, the type of road on which the blind spot area is formed (road width or number of lanes), the type of obstacle that forms the blind spot area, and the environment around the vehicle M (type of road on which the vehicle is traveling).
- blind spot area-related information such as the type, position, and size of the blind spot area, the type of road on which the blind spot area is formed (road width or number of lanes), the type of obstacle that forms the blind spot area, and the environment around the vehicle M (type of road on which the vehicle is traveling).
- the surrounding environment detection unit 112 may obtain blind spot area related information based on the current position of the vehicle M and map data instead of the data transmitted from the exterior camera 31 and the surrounding environment sensor 32.
- the surrounding environment detection unit 112 may detect blind spot area related information as the surrounding environment of the vehicle M, such as the identified current position of the vehicle M and the road type corresponding to the current position from the map data.
- FIG. 4 is a diagram for explaining the pop-out object setting process, including the specific point identification process, executed in the vehicle control system 10 of this embodiment.
- the driving assistance control unit 116 executes a jumping object setting process in which, when the host vehicle M is traveling at the current speed and reaches the blind spot area, the jumping object setting process assumes that there is a jumping object that will jump out from the blind spot area and sets the jumping object OB.
- the driving assistance control unit 116 sets the position and movement speed of the object that has jumped out as a position and movement speed that are assumed in advance, for example, a position and speed that can be assumed based on the current position and speed of the vehicle M.
- the driving assistance control unit 116 identifies the current speed (hereinafter referred to as "current vehicle speed") and current position of the vehicle M, and identifies information related to the object that is about to jump out OB based on the blind spot area-related information described above.
- the driving assistance control unit 116 identifies the type of the jumping out object OB as information related to the jumping out object, as well as the initial position (hereinafter referred to as the "start position of movement”) and movement speed (hereinafter referred to as the "estimated speed") of the jumping out object.
- the driving assistance control unit 116 executes a specific point identification process to identify a specific point where there is a risk of collision between the jumping out object OB and the vehicle M.
- the driving assistance control unit 116 may also execute the specific location identification process through a process separate from the process for setting the jumping out object.
- the driving assistance control unit 116 identifies the type of the jumping out object OB based on the blind spot area related information detected as described above, and also identifies the movement speed of the jumping out object OB based on the type of the jumping out object.
- the data storage unit 142 stores table data that specifies the type of object that has jumped out in association with the blind spot area related information, and the driving assistance control unit 116 refers to the table data based on the blind spot area related information to identify the type of object that has jumped out OB.
- the driving assistance control unit 116 sets a bicycle as a rushing object OB, and if the blind spot area is formed by a car as an obstacle, sets a pedestrian as a rushing object OB.
- the data memory unit 142 stores an expected start speed as an initial value for each type of object that is jumping out, and the driving assistance control unit 116 refers to the table data based on the identified type of object that is jumping out, and identifies the expected start speed of the object that is jumping out OB.
- the driving assistance control unit 116 specifies 5 km/h as the expected starting speed for a pedestrian, or 15 km/h for a bicycle.
- the driving assistance control unit 116 identifies an area (hereinafter referred to as the "overlapping area”) that extends from the blind spot area and crosses the direction of travel of the vehicle M, has the same width (length in the depth direction relative to the direction of travel) as the blind spot area, and overlaps with the area through which the vehicle M passes as it travels.
- the driving assistance control unit 116 executes a specific point identification process to identify specific points within the identified overlapping area where there is a risk of collision between the object OB and the vehicle M.
- the driving assistance control unit 116 performs the specific point identification process by identifying the overlapping area and identifying the closest point in the direction of travel of the vehicle M within the overlapping area, or a point determined by the type of blind spot area, as the specific point.
- the driving assistance control unit 116 calculates the distance L from the current position of the vehicle M to the specific point based on the current position of the vehicle M identified by the surrounding environment detection unit 112 and the identified specific point.
- the driving assistance control unit 116 detects the current speed of the vehicle M (i.e., the current vehicle speed) based on the data transmitted from the vehicle operation/behavior sensor 27.
- the driving assistance control unit 116 calculates the predicted time when the vehicle M will arrive at the specific point based on the calculated distance L from the current position of the vehicle M to the blind spot area and the current vehicle speed, and assumes that the object will jump out at the specific point at the calculated predicted time.
- the driving assistance control unit 116 identifies the current position of the object in the blind spot area based on the calculated predicted time and the expected starting speed of the object in the blind spot identified as described above.
- the driving assistance control unit 116 performs a back calculation based on the calculated predicted time and the assumed starting speed of the object jumping out to determine the current position of the object within the blind spot.
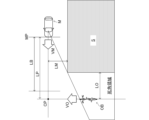
- FIG. 5 is a diagram for explaining the upper limit speed setting process executed in the vehicle control system 10 of this embodiment.
- the driving assistance control unit 116 When the driving assistance control unit 116 identifies the imminent object OB, it executes an upper limit speed setting process to set the upper limit speed at which the vehicle M will decelerate and reach, and at which contact between the vehicle M and the virtual object at the specific point can be avoided.
- the driving assistance control unit 116 sets the speed at which the vehicle M can be brought to an emergency stop at a specific location by the emergency stop brake function, which serves as a driving assistance function, regardless of whether the driver applies the brakes or not, as the upper limit speed.
- the driving assistance control unit 116 refers to the reference data stored in the data storage unit 142, and calculates and sets the upper limit speed of the host vehicle M in the corresponding blind spot area using a calculation method such as the one exemplified below using FIG. 5.
- the driving assistance control unit 116 refers to the reference data based on the blind spot area related information, identifies the type of the virtual object OB that is jumping out, and refers to the speed VO and position (distance) LO when the virtual object OB jumps out of the blind spot area.
- the driving assistance control unit 116 also determines the lateral distance LM from the obstacle that forms the blind spot (obstruction S in the case of FIG. 5) to the position where the host vehicle M is traveling, based on the blind spot-related information and information on the surrounding environment.
- the driving assistance control unit 116 identifies the predicted collision point CP where the object OB will collide with the vehicle M within the specific location based on the distance LM and position LO.
- the driving assistance control unit 116 identifies the detection point MP of the object OB jumping out of the vehicle M (i.e., the control instruction point for the emergency stop brake of the vehicle M), and identifies the distance LP from the object OB jumping out to the point CP where the object actually collides with the object OB.
- the driving assistance control unit 116 determines the braking distance LB due to the emergency stop braking of the vehicle M, and calculates the upper limit speed by comparing this distance LB with the distance LP.
- the detection point of the protruding object OB i.e., the control instruction point for the emergency stop brake of the vehicle M
- the detection point of the protruding object OB is the recognized point where the protruding object OB appears from the edge S0 of the obstacle (i.e., the obstruction S).
- the driving assistance control unit 116 determines the distance LB at which the emergency stop brake exerts maximum deceleration AB based on the planned time T from the control command for the emergency stop brake of the vehicle M to the start of operation of the emergency stop brake and the speed VM of the host vehicle M.
- distance LP > distance LB a collision between the host vehicle M and the object OB can be avoided, and the driving assistance control unit 116 ultimately calculates the speed VM of the host vehicle M that satisfies this condition as the upper limit speed.
- the driving assistance control unit 116 calculates "20 km/h" as the upper limit speed at which distance LP > distance LB holds.
- the driving assistance control unit 116 executes a speed change plan setting process that sets a speed change plan (trajectory of speed change) in which a speed is specified according to the distance traveled by the vehicle M (hereinafter referred to as the "vehicle travel distance") based on the distance from the current position of the vehicle M to a specific point.
- a speed change plan trajectory of speed change
- the driving assistance control unit 116 sets one or more speed change plans in which a speed corresponding to the speed change of the host vehicle M from the current position of the host vehicle M to a specific point is specified, and in which the host vehicle M passes through the specific point at a speed less than the upper limit speed.
- the driving assistance control unit 116 calculates, as a speed trajectory, a speed progression for decelerating from the current vehicle speed to the upper limit speed at the specific point in a reasonable manner and within a range that does not cause discomfort to passengers, including the driver, depending on the distance from the current position to the specific point.
- the driving assistance control unit 116 sets the speed for each predetermined travel distance of the vehicle M as a trajectory of speed change from the current position of the vehicle M, the distance from the current position to a specific point, the current speed of the vehicle M (current vehicle speed), and the upper speed limit.
- Figures 6 to 9 are diagrams for explaining the visualization control process executed in the vehicle control system 10 of this embodiment.
- the driving assistance control unit 116 executes visualization control processing based on the comparison result between the current vehicle speed of the vehicle M and the speed specified in the speed change plan (hereinafter referred to as the "planned speed").
- the driving assistance control unit 116 executes a visualization control process to make the driver aware of the risk of collision between the vehicle M and the object OB jumping out, according to the above comparison result, at predetermined timings or each time a predetermined distance is traveled.
- the driving assistance control unit 116 executes a planned speed determination process that determines whether the current vehicle speed is faster or slower than the planned speed, or whether these speeds match, while determining whether the speed is slower than the upper limit speed.
- the driving assistance control unit 116 in cooperation with the notification control unit 117, executes a visualization control process to associate the jumping out object OB with the blind spot area and visualize it, in order to make the driver aware of the risk of collision between the vehicle M and the jumping out object OB, depending on the result of the planned speed determination process.
- the notification control unit 117 executes a display control process to associate the object with real space or to visualize it on map data.
- the notification control unit 117 also executes a display control process that changes the visualization method of the protruding object depending on the result of the determination as to whether the current vehicle speed is faster or slower than the planned speed, or whether the current vehicle speed matches the planned speed.
- the notification control unit 117 changes the visualization method of the protruding object when it determines that the current vehicle speed is faster than the planned speed, when it determines that the current vehicle speed matches the planned speed, or when it determines that the current vehicle speed is slower than the planned speed.
- the driving assistance control unit 116 executes a planned speed determination process in which it compares the planned speed at the corresponding point with the current vehicle speed at each predetermined timing or each time a predetermined distance is traveled, and determines whether the current vehicle speed is faster or slower than the planned speed, or whether the two match.
- the driving assistance control unit 116 determines whether the current vehicle speed is faster or slower than the planned speed or a speed considered to be the same as the planned speed.
- the driving assistance control unit 116 also determines whether the current vehicle speed is equal to or coincides with a speed that is considered to be equal to the planned speed.
- the driving assistance control unit 116 uses, as speeds that are considered to be the same as the planned speed, speeds within a predetermined range (e.g., ⁇ 1 km/h), or an average speed over a certain period of time (e.g., 1 second), etc.
- a predetermined range e.g., ⁇ 1 km/h
- an average speed over a certain period of time e.g., 1 second
- the driving assistance control unit 116 executes the planned speed determination process, if the current vehicle speed is already slower than the upper limit speed, it may determine that there is no longer a risk of collision with the object OB that is jumping out at the specific point, and may discontinue the display control process.
- the notification control unit 117 executes a display control process to visualize the virtual object OB in association with real space or on map data so that the driver is aware of the risk of collision between the vehicle M and the protruding object OB.
- the notification control unit 117 changes the visualization method (display method) of the protruding object OB according to the determination result of the planned speed determination process.
- the notification control unit 117 uses, as a visualization method, the display color of the pop-out object OB or the moving speed of the pop-out object, including the correspondence with the blind spot area or a specific point.
- the notification control unit 117 visualizes the visualization information of the protruding object OB in a portion that forms a blind spot in real space so that it is virtually visible to the driver at each predetermined timing or each time a predetermined distance is traveled.
- the notification control unit 117 visualizes the protruding object OB by displaying the protruding object OB on the transparent object.
- FIG. 6 shows an example of a case where the jumping object OB is visualized in relation to the real space visible through the windshield inside the vehicle M, and is an example of a case where the jumping object OB is visualized superimposed on an area of an obstacle that is considered to be a blind spot area in real space.
- FIG. 6 shows an example in which the moving speed and position of the pop-out object OB are changed, as in FIG. 3, and the display of the pop-out object is changed from Display 1 to Display 2.
- the notification control unit 117 may visualize the protruding object OB by superimposing visualization information of the protruding object OB on a display area on the map data where a blind spot area is formed at each predetermined timing or each time a predetermined distance is traveled.
- the notification control unit 117 superimposes visualization information of the protruding object OB on a display area in which a blind spot area is formed on the map data (2D or 3D) of a display that displays a map for navigation or the like.
- FIG. 7 shows an example of a case where a jumping object OB is visualized in association with an image of map data (navigation), and is an example of a case where a jumping object OB is visualized by being superimposed on an area of an obstacle that is considered to be a blind spot area in the map data.
- FIG. 7 shows an example in which the moving speed and position of the pop-out object OB are changed, as in FIG. 3, and the display of the pop-out object is changed from Display 1 to Display 2.
- Display control process control of display color of pop-out object
- the notification control unit 117 controls the display color of the jumping object OB, it changes the display color of the jumping object according to the difference between the planned speed at the current position of the vehicle M and the current vehicle speed.
- the notification control unit 117 changes the display color of the jumping object OB according to the difference between the planned speed at the current position of the vehicle M and the current vehicle speed, depending on the result of the determination between the current vehicle speed of the vehicle M and the corresponding planned speed.
- the notification control unit 117 visualizes the protruding object OB in a color (e.g., red) indicating a high risk of collision with the protruding object, as shown in FIG. 8, by controlling the display color in the display control process.
- a color e.g., red
- the notification control unit 117 displays the jumping object OB in a color that enhances the driver's focus.
- the notification control unit 117 visualizes the protruding object OB in a color (e.g., yellow) that indicates a low risk of collision with the protruding object OB, as shown in FIG. 8.
- a color e.g., yellow
- the notification control unit 117 will display the object OB jumping out in a low-risk color.
- the notification control unit 117 visualizes the protruding object OB in a color (green) that indicates that there is no risk of collision with the protruding object OB, as shown in FIG. 8.
- the notification control unit 117 displays the jumping out object OB in a color that indicates that the jumping out object is safe for the driver.
- Figure 8 shows an example in which a yellow protruding object OB is initially displayed on the display together with a map image when the driving assistance control process begins.
- FIG. 8 shows an example in which the display color of the protruding object OB changes from red to yellow to green depending on the result of the planned speed determination process after the driving assistance control process starts.
- the notification control unit 117 may stop the visualization control process and terminate the driving assistance control process based on the risk of collision with the object OB that is about to jump out.
- Display control process control of the moving speed of the pop-out object
- the notification control unit 117 controls the movement speed of the jumping object OB as a display control process, it changes the movement speed of the jumping object OB from the estimated speed when the jumping object was identified based on the difference between the planned speed at the current position of the vehicle M and the current vehicle speed.
- the notification control unit 117 changes the movement speed of the jumping object OB according to the difference between the planned speed at the current position of the vehicle M and the current vehicle speed, depending on the result of the determination between the current vehicle speed and the corresponding planned speed.
- the notification control unit 117 visualizes the object OB that is about to jump out, moving faster than the expected speed, to indicate a high risk of collision with the object OB, as shown in FIG. 9.
- the notification control unit 117 displays the pop-out object OB by making the moving speed of the pop-out object OB when moving toward the specific point faster than the assumed speed.
- the notification control unit 117 will display the speed difference as 1.33 times, and the speed of the object that has suddenly appeared will be 1.33 times the expected speed or the previous speed.
- the notification control unit 117 visualizes the jumping out object OB while maintaining the expected speed, as shown in FIG. 9, to indicate that the risk of collision with the jumping out object OB is low.
- the notification control unit 117 will display the object that has jumped out while maintaining the travel speed at the start of movement.
- the notification control unit 117 visualizes the protruding object OB at a speed slower than the expected speed to indicate that there is no risk of collision with the protruding object OB, as shown in FIG. 9.
- the notification control unit 117 displays the pop-out object OB at a speed slower than the movement speed at the start of the movement.
- FIG. 9 shows an example in which an object OB is displayed on the display together with a map image at an expected speed when the driving assistance control process starts.
- FIG. 9 also shows an example of a case where the moving speed of the protruding object OB changes to a fast moving speed, an expected speed, and a slow moving speed according to the determination result of the planned speed determination process after the driving assistance control process starts.
- the notification control unit 117 may stop the visualization control process and terminate the driving assistance control process based on the risk of collision with the object OB that is about to jump out.
- the notification control unit 117 may control the moving speed of the pop-out object OB in addition to controlling the display color of the pop-out object OB as described above as a display control process.
- the notification control unit 117 may control the display state (visualization state) of the pop-out object OB instead of or in addition to the above-mentioned moving speed.
- the notification control unit 117 changes the state of the object OB that is about to jump out to a state where the driver recognizes that the object is moving faster (or slower) if the vehicle speed is faster (or slower) than the corresponding planned speed.
- the notification control unit 117 changes the state to a running state (or a slow walking state) if the vehicle speed is faster (or slower) than the corresponding planned speed, or changes the state to a walking state at the expected speed if the vehicle speed matches the corresponding planned speed.
- FIGS. 10 and 11 are flowcharts showing the operation of the driving assistance control process based on the risk of collision with a jumping object OB, which is executed by the driving assistance control device 100 of this embodiment.
- the driving assistance control unit 116 detects the current speed (current vehicle speed) and current position of the vehicle M (step S102).
- the driving assistance control unit 116 detects the current vehicle speed based on data from the vehicle operation/behavior sensor 27, and detects the current position of the vehicle M using the surrounding environment detection unit 112.
- the driving assistance control unit 116 estimates the starting position and moving speed (estimated speed) of the object OB that may jump out from the blind spot area based on the detected current vehicle speed, the identified current position of the vehicle M, and the detected position of the blind spot area (step S103).
- the driving assistance control unit 116 executes an upper limit speed setting process to set an upper limit speed of the host vehicle M at which a collision can be avoided at a specific point where the host vehicle M may collide with the object OB that has jumped out, which is a speed that the host vehicle M will reach by decelerating from the detected speed (step S104).
- the driving assistance control unit 116 executes a speed change plan setting process to set a speed change plan for the host vehicle M to pass through the specific point at less than the upper limit speed (step S105).
- the driving assistance control unit 116 causes the notification control unit 117 to start a visualization control process for visualizing the pop-out object OB in relation to real space or map data based on the set position and moving speed (step S106).
- the driving assistance control unit 116 executes a planned speed determination process to determine whether the detected speed of the vehicle M is faster than a speed (i.e., a planned speed) according to the distance to a specific point based on the current position of the vehicle M as defined by the speed change plan (step S107).
- a speed i.e., a planned speed
- the driving assistance control unit 116 determines that the speed of the host vehicle M is faster than the planned speed, it proceeds to processing in step S108, and if it determines that the speed of the host vehicle M is not faster than the planned speed, it proceeds to processing in step S109.
- the driving assistance control unit 116 determines that the speed of the vehicle M is faster than the planned speed, it causes the notification control unit 117 to execute a visualization control process (risk: high) to make the driver aware of the high risk of collision with the object OB that is jumping out (step S108).
- a visualization control process risk: high
- the notification control unit 117 executes a display control process under the control of the driving assistance control unit 116 to visualize a color (red) indicating a high risk of collision with a jumping object OB, a moving speed (speed when driving), or both.
- the driving assistance control unit 116 determines that the speed of the vehicle M is not faster than the planned speed, it determines whether the detected speed of the vehicle M is faster than the upper limit speed (step S109).
- the driving assistance control unit 116 determines that the detected speed of the vehicle M is faster than the upper limit speed, it proceeds to processing in step S110, and if it determines that the detected speed of the vehicle M is not faster (slower) than the upper limit speed, it proceeds to processing in step S111.
- the driving assistance control unit 116 determines that the speed of the vehicle M is faster than the upper speed limit, it causes the notification control unit 117 to execute a visualization control process (risk: low) to make the driver aware that the risk of collision with the virtual object OB is low (step S110).
- a visualization control process risk: low
- the notification control unit 117 executes a display control process under the control of the driving assistance control unit 116 to visualize a color (yellow) indicating a low risk of collision with the jumping object OB, a travel speed (the initially identified expected speed), or both.
- the notification control unit 117 executes a display control process under the control of the driving assistance control unit 116 to visualize a color (green), a moving speed (slow walking speed), or both, indicating that there is no risk of collision with the jumping out object OB.
- the driving assistance control unit 116 detects the current speed of the vehicle M (current vehicle speed) based on data from the vehicle operation/behavior sensor 27, and identifies the current position of the vehicle M identified by the surrounding environment detection unit 112 (step S112).
- the driving assistance control unit 116 determines whether the detected current vehicle speed has changed from the previously detected speed of the vehicle M (step S113).
- step S107 If the driving assistance control unit 116 determines that the speed of the vehicle M has changed, it proceeds to step S107, and if it determines that the speed of the vehicle M has not changed, it proceeds to step S113.
- the driving assistance control unit 116 determines whether an operation end condition, such as the host vehicle M reaching a specific location, has been met (step S114).
- the driving assistance control unit 116 determines that the operation termination condition is met, it causes the notification control unit 117 to execute various processes (hereinafter referred to as "termination processes") for terminating the visualization control process of the virtual object OB (step S115), thereby terminating this operation.
- Modifications [B6] Modifications [B6.1] Modification 1: Intermittent Display of a Pop-out Object Next, intermittent display of a pop-out object OB will be described as Modification 1 of this embodiment with reference to FIG.
- FIG. 12 is a diagram for explaining the intermittent display of the pop-out object OB in this modified example.
- a display control process may be performed in which the pop-out virtual object OB is intermittently visualized in association with real space, or intermittently displayed on the map data.
- the object OB jumping out which is displayed for visualization purposes, is intermittently visualized, allowing the driver to more reliably recognize the object OB jumping out.
- the driving assistance control unit 116 causes the notification control unit 117 to perform display control processing to intermittently visualize the pop-out object OB in association with real space, or to intermittently visualize it on the map data.
- the notification control unit 117 executes an intermittent display control process that alternates between superimposing and hiding the visualization information of the pop-out object OB at each predetermined timing or each time a predetermined distance is traveled.
- the notification control unit 117 displays the protruding object OB for a certain period of time using the specified display color, movement speed, or both each time the planned speed determination process is executed, and then hides the protruding object until the next planned speed determination process is executed.
- FIG. 12 shows an example in which, after the display of the pop-out object OB has begun, the pop-out object OB is displayed at a new moving speed, changing its position and being hidden each time the moving speed of the pop-out object OB changes.
- the notification control unit 117 may display the pop-out object OB for a certain period of time using a specified display color, movement speed, or both at a predetermined timing, instead of each time the planned speed determination process is executed.
- the notification control unit 117 intermittently visualizes the protruding object OB by displaying the protruding object OB on a transparent object such as the windshield or glasses when the driver is viewing the direction of travel through the transparent object.
- the notification control unit 117 intermittently superimposes the visualization information of the protruding object OB on a display area where a blind spot area is formed on the map data of a display that displays a map such as a navigation system.
- Variation 2 Various Processing by the Management Server Next, a variation 2 of this embodiment will be described in which a part or all of the driving assistance control processing based on the collision risk with a jumping object OB is executed by the management server.
- the various processes described above are executed by the driving assistance control device 100, but a management server connected to the driving assistance control device 100 may execute all of the processes described above except for some of the various processes described above or processes that cannot be executed by the management server, such as display control processes.
- Embodiments of the present disclosure include configurations that are substantially the same as the configurations described in the above embodiments (e.g., configurations with the same function, method, and result, or configurations with the same purpose and effect). Furthermore, embodiments of the present disclosure include configurations in which non-essential parts of the configurations described in the above embodiments are replaced. Furthermore, embodiments of the present disclosure include configurations that achieve the same effects or purposes as the configurations described in the above embodiments. Furthermore, embodiments of the present disclosure include configurations in which publicly known technology is added to the configurations described in the above embodiments.
- Vehicle control system 100 Driving assistance control device 110: Processing unit 111: Communication control unit 112: Surrounding environment detection unit 113: Vehicle data acquisition unit 116: Driving assistance control unit 117: Notification control unit 140: Storage unit 141: Main storage unit 142: Data storage unit 150: Information storage medium 170: Communication unit
Landscapes
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Human Computer Interaction (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Traffic Control Systems (AREA)
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2024525247A JP7659702B2 (ja) | 2022-12-01 | 2022-12-01 | 運転支援装置、車両、コンピュータプログラムを記録した記録媒体及び運転支援方法 |
| PCT/JP2022/044340 WO2024116364A1 (ja) | 2022-12-01 | 2022-12-01 | 運転支援装置、車両、コンピュータプログラムを記録した記録媒体及び運転支援方法 |
| US18/737,245 US20240326789A1 (en) | 2022-12-01 | 2024-06-07 | Driving assistance apparatus, vehicle, non-transitory recording medium containing computer program, and driving assistance method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2022/044340 WO2024116364A1 (ja) | 2022-12-01 | 2022-12-01 | 運転支援装置、車両、コンピュータプログラムを記録した記録媒体及び運転支援方法 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US18/737,245 Continuation US20240326789A1 (en) | 2022-12-01 | 2024-06-07 | Driving assistance apparatus, vehicle, non-transitory recording medium containing computer program, and driving assistance method |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2024116364A1 true WO2024116364A1 (ja) | 2024-06-06 |
Family
ID=91323450
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2022/044340 Ceased WO2024116364A1 (ja) | 2022-12-01 | 2022-12-01 | 運転支援装置、車両、コンピュータプログラムを記録した記録媒体及び運転支援方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US20240326789A1 (https=) |
| JP (1) | JP7659702B2 (https=) |
| WO (1) | WO2024116364A1 (https=) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3548845B1 (en) * | 2017-01-12 | 2021-10-13 | Mobileye Vision Technologies Ltd. | Navigation based on vehicle activity |
| WO2024195065A1 (ja) * | 2023-03-22 | 2024-09-26 | 株式会社Subaru | 運転支援装置、運転支援方法、及び記録媒体 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015099560A (ja) * | 2013-11-20 | 2015-05-28 | 住友電工システムソリューション株式会社 | 走行支援装置、コンピュータプログラム、およびコンピュータプログラムの製造方法 |
| WO2021124794A1 (ja) * | 2019-12-16 | 2021-06-24 | 日立Astemo株式会社 | 車両制御装置、および、車両制御システム |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006072830A (ja) * | 2004-09-03 | 2006-03-16 | Aisin Aw Co Ltd | 運転支援システム及び運転支援モジュール |
| JP5053776B2 (ja) * | 2007-09-14 | 2012-10-17 | 株式会社デンソー | 車両用視界支援システム、車載装置、及び、情報配信装置 |
| JP5626475B2 (ja) * | 2011-08-10 | 2014-11-19 | トヨタ自動車株式会社 | 運転支援装置 |
| US10269260B2 (en) * | 2015-08-07 | 2019-04-23 | Honda Motor Co., Ltd. | System and method for coaching a driver |
| JP6371329B2 (ja) * | 2016-05-16 | 2018-08-08 | トヨタ自動車株式会社 | 車両の運転支援制御装置 |
| JP6796041B2 (ja) | 2017-09-07 | 2020-12-02 | 日立建機株式会社 | 安全運転支援装置 |
| WO2022097365A1 (ja) * | 2020-11-06 | 2022-05-12 | 日立Astemo株式会社 | 外界認識装置、および、外界認識方法 |
-
2022
- 2022-12-01 WO PCT/JP2022/044340 patent/WO2024116364A1/ja not_active Ceased
- 2022-12-01 JP JP2024525247A patent/JP7659702B2/ja active Active
-
2024
- 2024-06-07 US US18/737,245 patent/US20240326789A1/en active Pending
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015099560A (ja) * | 2013-11-20 | 2015-05-28 | 住友電工システムソリューション株式会社 | 走行支援装置、コンピュータプログラム、およびコンピュータプログラムの製造方法 |
| WO2021124794A1 (ja) * | 2019-12-16 | 2021-06-24 | 日立Astemo株式会社 | 車両制御装置、および、車両制御システム |
Also Published As
| Publication number | Publication date |
|---|---|
| US20240326789A1 (en) | 2024-10-03 |
| JPWO2024116364A1 (https=) | 2024-06-06 |
| JP7659702B2 (ja) | 2025-04-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6222137B2 (ja) | 車両制御装置 | |
| US9981658B2 (en) | Autonomous driving vehicle system | |
| US20160304126A1 (en) | Vehicle control device | |
| JP7059652B2 (ja) | 車両制御システム | |
| JP7674402B2 (ja) | 表示装置 | |
| CN110799403B (zh) | 车辆控制装置 | |
| US20210139019A1 (en) | Driving assistance apparatus | |
| JP2018095143A (ja) | 車両制御装置 | |
| JP7606628B2 (ja) | 運転支援装置及び車両並びにコンピュータプログラムを記録した記録媒体 | |
| US20240326789A1 (en) | Driving assistance apparatus, vehicle, non-transitory recording medium containing computer program, and driving assistance method | |
| JP2019148908A (ja) | 車両制御装置 | |
| WO2022162909A1 (ja) | 表示制御装置及び表示制御方法 | |
| JP7619853B2 (ja) | 運転支援装置 | |
| JP7708560B2 (ja) | 運転支援装置 | |
| US11912275B2 (en) | Autonomous driving control method and autonomous driving control device | |
| JP7394018B2 (ja) | 車両制御装置 | |
| JP7853131B2 (ja) | 運転支援システム及びコンピュータプログラム | |
| CN113401056A (zh) | 显示控制装置、显示控制方法以及计算机可读取存储介质 | |
| JP7659700B2 (ja) | 運転支援システム及び車両並びにコンピュータプログラムを記録した記録媒体 | |
| JP2024043673A (ja) | 運転支援装置、車両及びコンピュータプログラム | |
| JP2011111132A (ja) | 運転支援装置 | |
| JP7751127B2 (ja) | 運転支援装置、車両、コンピュータプログラムを記録した記録媒体及び運転支援方法 | |
| WO2024241465A1 (ja) | 運転支援装置及び運転支援処理方法並びに記録媒体 | |
| JP7708985B2 (ja) | 運転支援装置、運転支援方法及び記録媒体 | |
| JP7494152B2 (ja) | 車両制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| WWE | Wipo information: entry into national phase |
Ref document number: 2024525247 Country of ref document: JP |
|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 22967197 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 22967197 Country of ref document: EP Kind code of ref document: A1 |