WO2024105759A1 - 内燃機関の制御装置 - Google Patents
内燃機関の制御装置 Download PDFInfo
- Publication number
- WO2024105759A1 WO2024105759A1 PCT/JP2022/042329 JP2022042329W WO2024105759A1 WO 2024105759 A1 WO2024105759 A1 WO 2024105759A1 JP 2022042329 W JP2022042329 W JP 2022042329W WO 2024105759 A1 WO2024105759 A1 WO 2024105759A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- torque
- target
- internal combustion
- combustion engine
- throttle opening
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images















Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/02—Circuit arrangements for generating control signals
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/24—Electrical control of supply of combustible mixture or its constituents characterised by the use of digital means
- F02D41/26—Electrical control of supply of combustible mixture or its constituents characterised by the use of digital means using computer, e.g. microprocessor
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D45/00—Electrical control not provided for in groups F02D41/00 - F02D43/00
Definitions
- This application relates to a control device for an internal combustion engine.
- the control device for an internal combustion engine in Patent Document 1 controls the output torque of the internal combustion engine based on map data that shows the relationship between the output torque and control parameters such as the intake air volume, which is an operating state that affects the output torque, and the fuel injection volume.
- map data that shows the relationship between the output torque and control parameters such as the intake air volume, which is an operating state that affects the output torque, and the fuel injection volume.
- the technology in Patent Document 1 learns the difference between the output torque of the internal combustion engine estimated based on the current of a generator that generates electricity using the output torque of the internal combustion engine, and the required torque, and corrects the map data based on the difference so that the output torque matches the required torque.
- Patent Document 1 estimates the output torque of the internal combustion engine based on the generator current, and learns the variation in output torque caused by individual differences and aging.
- the present application therefore aims to provide a control device for an internal combustion engine that accurately learns from the operating state of the internal combustion engine the variations in output torque of the internal combustion engine that arise due to individual differences and aging of the internal combustion engine, and uses the learning results to suppress the variations in the output torque of the internal combustion engine and control the output torque so that it approaches a target torque.
- a first internal combustion engine control device includes: a rotation information detection unit that detects the rotation speed and angular acceleration of a crankshaft of an internal combustion engine; an estimated torque calculation unit that calculates an estimated torque, which is an estimated value of the torque of the crankshaft, based on the angular acceleration; a learning value calculation unit that learns a deviation between the estimated torque and a preset reference value of the estimated torque as a torque error learning value; a torque control unit that uses throttle torque characteristic data in which a relationship between at least an output torque of the internal combustion engine, the rotation speed, and a throttle opening degree of the internal combustion engine is preset, and calculates a target throttle opening degree based on a target torque of the internal combustion engine, the current rotation speed, and the torque error learning value, such that the output torque taking into account the torque error learning value approaches the target torque; and a throttle control unit that controls the throttle opening based on the target throttle opening.
- a second internal combustion engine control device includes: a rotation information detection unit that detects the rotation speed and angular acceleration of a crankshaft of an internal combustion engine; an estimated torque calculation unit that calculates an estimated torque, which is an estimated value of the torque of the crankshaft, based on the angular acceleration; a learning value calculation unit that learns a deviation between the estimated torque and a preset reference value of the estimated torque as a torque error learning value; a second estimated torque calculation unit that refers to torque characteristic data for a second estimated torque, in which a relationship between an operating state for torque characteristic data, which includes at least one of a throttle opening degree, an in-cylinder intake air amount, a fuel injection amount, and the rotation speed of the internal combustion engine, and a second estimated torque as an output torque of the internal combustion engine, is preset, and calculates the second estimated torque corresponding to a current operating state for the torque characteristic data; a second estimated torque correction unit that corrects the second estimated torque using the torque error learned value to calculate a corrected second estimated torque;
- the first and second internal combustion engine control devices of the present application by comparing the estimated torque calculated based on the actually detected angular acceleration with a reference value of the estimated torque, it is possible to learn the torque variation caused by the individual variation of the internal combustion engine, the change over time (engine deterioration), etc. as a torque error learning value.
- the throttle torque characteristic data and based on the target torque of the internal combustion engine, the current rotation speed, and the torque error learning value or the corrected second estimated torque corrected by the torque error learning value, it is possible to calculate a target throttle opening such that the output torque taking into account the torque error learning value approaches the target torque, or a target throttle opening such that the corrected second estimated torque approaches the target torque, thereby suppressing the torque variation caused by the individual variation of the internal combustion engine, the change over time (engine deterioration), etc., and bringing the output torque of the internal combustion engine closer to the target torque.
- FIG. 1 is a schematic configuration diagram of a control device for an internal combustion engine according to a first embodiment
- 1 is a block diagram of a control device for an internal combustion engine according to a first embodiment
- 1 is a hardware configuration diagram of a control device for an internal combustion engine according to a first embodiment
- 5 is a time chart illustrating a process of a rotation information detection unit according to the first embodiment.
- FIG. 4 is a diagram illustrating the relationship between each cylinder and each stroke according to the first embodiment.
- FIG. 4 is a diagram illustrating target torque setting data according to the first embodiment.
- 5 is a diagram illustrating calculation of a maximum value of angular acceleration of each cylinder according to the first embodiment.
- FIG. FIG. 2 is a block diagram of a learning value calculation unit according to the first embodiment.
- FIG. 4 is a diagram illustrating torque characteristic data for reference values according to the first embodiment.
- FIG. 4 is a diagram illustrating throttle torque characteristic data according to the first embodiment.
- FIG. 2 is a block diagram of a torque control unit according to the first embodiment.
- FIG. 4 is a block diagram for explaining an example of a target torque correction unit according to the first embodiment.
- FIG. 11 is a block diagram of a control device for an internal combustion engine according to a second embodiment.
- FIG. 11 is a block diagram of a torque control unit according to a second embodiment.
- FIG. 11 is a block diagram of a control device for an internal combustion engine according to a third embodiment.
- FIG. 13 is a time chart for explaining error learning according to the third embodiment.
- FIG. 11 is a block diagram of a control device for an internal combustion engine according to a fourth embodiment.
- FIG. 13 is a diagram illustrating torque characteristic data for a second estimated torque according to the fourth embodiment.
- FIG. 1 is a schematic configuration diagram of an internal combustion engine 1 and the control device 50 according to the present embodiment
- Fig. 2 is a block diagram of the control device 50 according to the present embodiment.
- the internal combustion engine 1 is provided with a combustion chamber 7 (hereinafter also referred to as a cylinder 7) for burning a mixture of air and fuel.
- the internal combustion engine 1 is provided with an intake pipe 23 for supplying air to the combustion chamber 7, and an exhaust pipe 17 for discharging exhaust gas burned in the combustion chamber 7.
- the internal combustion engine 1 is a gasoline engine.
- the internal combustion engine 1 is provided with a throttle valve 4 for opening and closing the intake pipe 23.
- the throttle valve 4 is an electronically controlled throttle valve that is driven to open and close by an electric motor controlled by a control device 50.
- the throttle valve 4 is provided with a throttle opening sensor 19 that outputs an electric signal according to the opening of the throttle valve 4.
- the intake pipe 23 upstream of the throttle valve 4 is provided with an airflow sensor 3 that outputs an electrical signal according to the amount of intake air drawn into the intake pipe 23.
- the internal combustion engine 1 is provided with an exhaust gas recirculation device 20.
- the exhaust gas recirculation device 20 has an EGR flow path 21 that recirculates exhaust gas from the exhaust pipe 17 to the intake manifold 12, and an EGR valve 22 that opens and closes the EGR flow path 21.
- the intake manifold 12 is the part of the intake pipe 23 downstream of the throttle valve 4.
- the EGR valve 22 is an electronically controlled EGR valve that is driven to open and close by an electric motor controlled by the control device 50.
- the exhaust pipe 17 is provided with an air-fuel ratio sensor 18 that outputs an electrical signal according to the air-fuel ratio of the exhaust gas in the exhaust pipe 17.
- the intake manifold 12 is provided with a gas pressure sensor 8 that outputs an electrical signal corresponding to the pressure inside the intake manifold 12.
- An injector 13 that injects fuel is provided in the downstream portion of the intake manifold 12. The injector 13 may be provided so as to inject fuel directly into the cylinders 7.
- the internal combustion engine 1 is provided with an atmospheric pressure sensor 33 that outputs an electrical signal corresponding to the atmospheric pressure.
- the internal combustion engine 1 is provided with a water temperature sensor 34 that detects the coolant temperature.
- an ignition plug that ignites the air-fuel mixture, and an ignition coil 16 that supplies ignition energy to the spark plug.
- an intake valve 14 that adjusts the amount of intake air drawn into the combustion chamber 7 from the intake pipe 23, and an exhaust valve 15 that adjusts the amount of exhaust gas discharged from the combustion chamber 7 to the exhaust pipe 17.
- the intake valve 14 is provided with an intake variable valve timing mechanism that makes the valve opening and closing timing variable.
- the exhaust valve 15 is provided with an exhaust variable valve timing mechanism that makes the valve opening and closing timing variable.
- the variable valve timing mechanisms 14 and 15 have electric actuators.
- the internal combustion engine 1 has multiple combustion chambers 7 (four in this example). Each combustion chamber 7 has a piston 5 inside.
- the piston 5 of each combustion chamber 7 is connected to the crankshaft 2 via a connecting rod 9 and a crank 32.
- the crankshaft 2 is rotated by the reciprocating motion of the piston 5.
- the combustion gas pressure generated in each combustion chamber 7 presses against the top surface of the piston 5, rotating the crankshaft 2 via the connecting rod 9 and the crank 32.
- the crankshaft 2 is connected to a power transmission mechanism that transmits driving force to wheels, a generator, etc.
- the power transmission mechanism is composed of a transmission, etc.
- the internal combustion engine 1 is equipped with a rotor 31 that rotates integrally with the crankshaft 2.
- the rotor 31 has multiple teeth at multiple predetermined crank angles. In this embodiment, the rotor 31 has teeth arranged at 20 degree intervals. The rotor 31 has teeth that are missing some of their teeth.
- the internal combustion engine 1 is equipped with a crank angle sensor 11 that is fixed to the engine block 24 and detects the teeth of the rotor 31.
- the internal combustion engine 1 is equipped with a camshaft connected to the crankshaft by a chain.
- the camshaft drives the intake valve 14 and the exhaust valve 15 to open and close.
- the camshaft rotates once for every two rotations of the crankshaft 2.
- the internal combustion engine 1 is equipped with a cam rotor that rotates together with the camshaft.
- the cam rotor has multiple teeth at multiple predetermined camshaft angles.
- the internal combustion engine 1 is equipped with a cam angle sensor 30 (see Figure 3) that is fixed to the engine block 24 and detects the teeth of the cam rotor.
- the control device 50 detects the crank angle based on the top dead center (TDC) of each piston 5 based on two types of output signals from the crank angle sensor 11 and the cam angle sensor 30, and determines the stroke of each combustion chamber 7.
- the internal combustion engine 1 is a four-stroke engine with an intake stroke, a compression stroke, a combustion stroke, and an exhaust stroke.
- the crank angle sensor 11 and cam angle sensor 30 output an electrical signal according to the change in the distance between each sensor and the teeth due to the rotation of the crankshaft 2.
- the output signal of each angle sensor 11, 30 is a square wave that turns on and off depending on whether the sensor is close to the teeth or far away.
- an electromagnetic pickup type sensor is used for each angle sensor 11, 30.
- the configuration of the internal combustion engine is not limited to the configuration described using FIG. 1, and internal combustion engines of various configurations may be used.
- the control device 50 includes a processing unit such as a rotation information detection unit 51, a target torque calculation unit 52, an estimated torque calculation unit 53, a learning value calculation unit 54, a torque control unit 55, and a throttle control unit 56.
- the processing units 51 to 56 of the control device 50 are realized by processing circuits included in the control device 50. Specifically, as shown in FIG.
- the control device 50 includes, as processing circuits, an arithmetic processing device 90 (computer) such as a CPU (Central Processing Unit), a storage device 91 connected to the arithmetic processing device 90 via a signal line such as a bus, an input circuit 92 that inputs an external signal to the arithmetic processing device 90, and an output circuit 93 that outputs a signal from the arithmetic processing device 90 to the outside.
- an arithmetic processing device 90 such as a CPU (Central Processing Unit)
- a storage device 91 connected to the arithmetic processing device 90 via a signal line such as a bus
- an input circuit 92 that inputs an external signal to the arithmetic processing device 90
- an output circuit 93 that outputs a signal from the arithmetic processing device 90 to the outside.
- the arithmetic processing device 90 may be an ASIC (Application Specific Integrated Circuit), an IC (Integrated Circuit), a DSP (Digital Signal Processor), an FPGA (Field Programmable Gate Array), various logic circuits, and various signal processing circuits.
- ASIC Application Specific Integrated Circuit
- IC Integrated Circuit
- DSP Digital Signal Processor
- FPGA Field Programmable Gate Array
- various logic circuits and various signal processing circuits.
- multiple arithmetic processing devices 90 of the same type or different types may be provided, and each process may be shared and executed.
- the memory device 91 includes volatile and non-volatile memory devices such as RAM (Random Access Memory), ROM (Read Only Memory), and EEPROM (Electrically Erasable Programmable ROM).
- the input circuit 92 is connected to various sensors and switches and includes A/D converters and the like that input the output signals of these sensors and switches to the arithmetic processing device 90.
- the output circuit 93 is connected to electrical loads and includes drive circuits and the like that output control signals from the arithmetic processing device 90 to these electrical loads.
- each of the processing units 51 to 56 of the control unit 50 are realized by the calculation processing unit 90 executing software (programs) stored in a storage unit 91 such as a ROM or EEPROM, and working in cooperation with other hardware of the control unit 50 such as the storage unit 91, input circuit 92, and output circuit 93.
- setting data such as target torque setting data, torque characteristic data for reference values, throttle torque characteristic data, correction coefficient setting data, moment of inertia Icrk, and load torque ⁇ load used by each of the processing units 51 to 56 are stored in the storage unit 91 such as a ROM or EEPROM.
- the calculated values of the rotation speed Ne, angular speed ⁇ d, angular acceleration ⁇ d, maximum angular acceleration ⁇ max, estimated torque ⁇ est, reference value ⁇ estref of estimated torque, torque error learning value ⁇ lrn, target throttle opening ⁇ thref0 for reference value, corrected target torque ⁇ refcrr, correction coefficient K ⁇ , target torque ⁇ ref, torque correction value ⁇ com, target throttle opening ⁇ thref, etc. calculated by each processing unit 51 to 56, etc., and each detected value, etc. are stored in a rewritable storage device 91 such as a RAM.
- the input circuit 92 is connected to the crank angle sensor 11, cam angle sensor 30, water temperature sensor 34, air flow sensor 3, throttle opening sensor 19, gas pressure sensor 8, atmospheric pressure sensor 33, air-fuel ratio sensor 18, accelerator position sensor 26, etc.
- the output circuit 93 is connected to the throttle valve 4 (electric motor), EGR valve 22 (electric motor), injector 13, ignition coil 16, intake variable valve timing mechanism 14, exhaust variable valve timing mechanism 15, etc. Note that various sensors, switches, actuators, etc. (not shown) are connected to the control device 50.
- the control device 50 detects the operating state of the internal combustion engine 1, such as the throttle opening ⁇ th, the amount of air intake in the cylinder, the pressure in the intake manifold, the atmospheric pressure, the air-fuel ratio, and the accelerator opening ⁇ aps, based on the output signals of the various sensors.
- the control device 50 calculates the fuel injection amount, ignition timing, etc. based on the input output signals of various sensors, and drives and controls the injector 13 and ignition coil 16, etc.
- the control device 50 also calculates the target opening of the EGR valve 22 based on the input output signals of various sensors, and drives and controls the electric motor of the EGR valve 22.
- the control device 50 calculates the target opening and closing timing of the intake valve and the target opening and closing timing of the exhaust valve based on the input output signals of various sensors, and drives and controls the intake and exhaust variable valve timing mechanisms 14, 15 based on the target opening and closing timings.
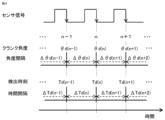
- Rotation information detection unit 51 detects the rotation speed Ne and angular acceleration ⁇ d of the crankshaft of the internal combustion engine. In this embodiment, the rotation information detection unit 51 detects the crank angle ⁇ d based on the output signal of the crank angle sensor 11, and calculates an angular velocity ⁇ d which is the time rate of change of the detected crank angle ⁇ d, and an angular acceleration ⁇ d which is the time rate of change of the angular velocity ⁇ d. The rotation information detection unit 51 detects the rotation speed Ne of the crankshaft based on the output signal of the crank angle sensor 11. Note that the rotation speed Ne corresponds to the angular velocity ⁇ d, but in this embodiment, it is an average speed of a stroke period.
- the rotation information detection unit 51 detects the crank angle ⁇ d based on the output signal of the crank angle sensor 11, and detects the detection time Td at which the crank angle ⁇ d is detected. Then, the rotation information detection unit 51 calculates the angle interval ⁇ d and the time interval ⁇ Td corresponding to the detection angle ⁇ d based on the detection angle ⁇ d, which is the detected crank angle ⁇ d, and the detection time Td.
- the rotation information detection unit 51 determines the crank angle ⁇ d when it detects the falling edge (or rising edge) of the output signal (rectangular wave) of the crank angle sensor 11. Using a known method, the rotation information detection unit 51 detects the crank angle ⁇ d based on the top dead center (TDC) of the piston of the first cylinder based on two types of output signals from the crank angle sensor 11 and the cam angle sensor 30, and determines the stroke of each cylinder 7.
- Figure 5 shows the strokes of the first to fourth cylinders.
- the rotation information detection unit 51 calculates the angular velocity ⁇ d based on each crank angle ⁇ d and the detection time Td at which each crank angle ⁇ d was detected. For example, as shown in the following formula, the rotation information detection unit 51 calculates the angular velocity ⁇ d(n) of the currently detected angle based on the angle interval ⁇ d(n) between the currently detected crank angle ⁇ d(n) and the previously detected crank angle ⁇ d(n-1) and the time interval ⁇ Td(n) between the currently detected time Td(n) and the previously detected time Td(n-1). Note that various other known methods may be used to calculate the angular velocity ⁇ d.
- the rotation information detection unit 51 calculates the angular acceleration ⁇ d based on the angular velocity ⁇ d. For example, as shown in the following formula, the rotation information detection unit 51 calculates the angular acceleration ⁇ d(n) of the current detection angle based on the angular velocity ⁇ d(n) calculated for the current detection angle, the angular velocity ⁇ d(n-1) calculated for the previous detection angle, and the time interval ⁇ Td(n) of the current detection angle. Note that various other well-known methods may also be used to calculate the angular acceleration ⁇ d.
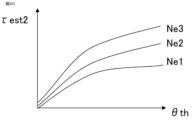
- Target torque calculation unit 52 calculates the output torque ⁇ of the internal combustion engine 1 requested by the driver as a target torque ⁇ ref, based on the accelerator opening ⁇ aps detected based on the output signal of the accelerator position sensor 26, the rotation speed Ne, and the like.
- the target torque calculation unit 52 uses target torque setting data in which the relationship between at least the accelerator opening ⁇ aps, the rotation speed Ne, and the target torque ⁇ ref is preset, to calculate the target torque ⁇ ref corresponding to the current accelerator opening ⁇ aps and the current rotation speed Ne.
- the target torque setting data is map data in which the relationship between the accelerator opening ⁇ aps, the rotation speed Ne, and the target torque ⁇ ref is preset, as shown in FIG. 6. In FIG. 6, the relationship between the accelerator opening ⁇ aps and the target torque ⁇ ref is set for each of a number of rotation speeds Ne1, Ne2, and Ne3.
- Estimated torque calculation unit 53 The estimated torque calculation unit 53 calculates an estimated torque ⁇ est, which is an estimated value of the torque of the crankshaft, based on the angular acceleration ⁇ d.
- the estimated torque calculation unit 53 calculates the maximum value ⁇ max of the angular acceleration ⁇ d during the combustion stroke, and calculates the estimated torque ⁇ est based on the maximum value ⁇ max of the angular acceleration.
- the estimated torque ⁇ est can be calculated using the maximum value ⁇ max of the angular acceleration increased by combustion, and the maximum value of the instantaneous torque increased mainly by combustion can be calculated as the estimated torque ⁇ est.
- the internal combustion engine 1 has four combustion chambers 7 (cylinders 7).
- the estimated torque calculation unit 53 calculates the maximum values of angular acceleration during the combustion stroke, ⁇ max1, ⁇ max2, ⁇ max3, and ⁇ max4, for each of the four combustion chambers 7, and calculates the estimated torque ⁇ est based on the average value ⁇ maxave of the maximum values of angular acceleration of the four combustion chambers, as shown in the following formula.
- the average value ⁇ maxave is calculated every two rotations of the crankshaft.
- the estimated torque calculation unit 53 multiplies the angular acceleration ⁇ d (in this example, the inter-cylinder average value of the maximum angular acceleration ⁇ maxave) by the moment of inertia Icrk to calculate the estimated torque ⁇ est.
- the moment of inertia Icrk is the total value of the moments of inertia of the rotating members that rotate integrally with the crankshaft, and is set in advance.
- the estimated torque calculation unit 53 calculates the estimated torque ⁇ est by subtracting the load torque ⁇ load from the multiplied value of the angular acceleration ⁇ d and the moment of inertia Icrk.
- the load torque ⁇ load is a variety of load torques applied to the crankshaft from outside the internal combustion engine, and is usually a negative value. For example, a preset value is used for the load torque ⁇ load.
- the estimated torque calculation unit 53 may use the torque obtained by multiplying the angular acceleration ⁇ d of the angle near the top dead center (TDC) of the piston by the moment of inertia Icrk as the load torque ⁇ load.
- the angle near the top dead center may be set to an angle within the range from 10 degrees before the top dead center to 10 degrees after the top dead center, for example, TDC.
- TDC The angle near the top dead center
- the connecting rod and the crank are in a straight line, and the cylinder pressure pushes the piston, so no axial torque is generated, and the load torque ⁇ load can be calculated.
- the load torque ⁇ load applied to the crankshaft from outside the internal combustion engine can be excluded, and the increase in instantaneous torque due to combustion can be calculated, improving the calculation accuracy of the estimated torque ⁇ est.
- the average angular acceleration during the stroke period may be used to calculate the estimated torque ⁇ est.
- the learning value calculation unit 54 calculates the deviation ⁇ est between the estimated torque ⁇ est and a preset reference value ⁇ estref of the estimated torque as a torque error learning value ⁇ lrn.
- the estimated torque ⁇ est calculated based on the actually detected angular acceleration ⁇ d is compared with the reference value ⁇ estref of the estimated torque, so that the torque variation caused by individual variations of the internal combustion engine 1, changes over time (engine deterioration), etc. can be learned as the torque error learning value ⁇ lrn.
- the learning value calculation unit 54 includes a reference value calculation unit 541 and an error learning unit 542.
- the reference value calculation unit 541 uses torque characteristic data for a reference value in which the relationship between the reference value operating state including at least one of the throttle opening ⁇ th, the in-cylinder intake air amount, the fuel injection amount, and the rotational speed Ne and the reference value ⁇ estref of the estimated torque is preset, and calculates the reference value ⁇ estref of the estimated torque corresponding to the current operating state for the reference value.
- the reference value calculation unit 541 may use torque characteristic data for a reference value in which the relationship between the operating state for a correction coefficient, which includes at least one of the target torque ⁇ ref, the target throttle opening ⁇ thref0 for the reference value calculated based on the target torque ⁇ ref, and the rotation speed Ne, and the reference value ⁇ estref of the estimated torque is preset.
- the reference value ⁇ estref of the estimated torque is the maximum value or increase in instantaneous torque due to combustion, and is therefore a different value from the target torque ⁇ ref, which is the average output torque during the stroke period. Therefore, the torque characteristic data for the reference value is set to a value that corresponds to the maximum value or increase in instantaneous torque due to combustion.
- the torque characteristic data for the reference value is map data in which the relationship between the throttle opening ⁇ th, the rotation speed Ne, and the reference value ⁇ estref of the estimated torque is preset.
- the reference value calculation unit 541 refers to the torque characteristic data for the reference value and calculates the reference value ⁇ estref of the estimated torque corresponding to the current throttle opening ⁇ th and the current rotation speed Ne.
- the amount of intake air in the cylinder, the amount of fuel injection, or the target torque ⁇ ref may be used instead of the throttle opening ⁇ th.
- the rotation speed Ne and parameters correlated with the output torque ⁇ such as the amount of intake air in the cylinder, the amount of fuel injection, or the target torque ⁇ ref, may be used as the operating state for the reference value.
- the reference value calculation unit 541 uses throttle torque characteristic data in which the relationship between at least the output torque ⁇ of the internal combustion engine, the rotation speed Ne, and the throttle opening ⁇ th is preset, and calculates the target torque ⁇ ref as the output torque ⁇ , and the throttle opening ⁇ th corresponding to the current rotation speed Ne as the target throttle opening ⁇ thref0 for the reference value.
- the throttle torque characteristic data is map data in which the relationship between the output torque ⁇ , the rotation speed Ne, and the throttle opening ⁇ th is preset.
- the target torque ⁇ ref is input to the output torque ⁇ of the map data
- the current rotation speed Ne is input to the rotation speed Ne of the map data
- the output torque ⁇ corresponding to the target torque ⁇ ref and the throttle opening ⁇ th set in the map data corresponding to the rotation speed Ne corresponding to the current rotation speed Ne are calculated
- the calculated throttle opening ⁇ th is calculated as the target throttle opening ⁇ thref0 for the reference value.
- the throttle opening ⁇ th is changed to the target throttle opening ⁇ thref0 for the reference value.
- the reference value calculation unit 541 refers to the torque characteristic data for the reference value and calculates the target throttle opening ⁇ thref0 for the reference value and the reference value ⁇ estref of the estimated torque corresponding to the current rotation speed Ne.
- the target value of the in-cylinder intake air amount may be used instead of the target throttle opening ⁇ thref0 for the reference value.
- various operating conditions of the internal combustion engine that are correlated with the output torque ⁇ such as the EGR rate, ignition timing, intake valve opening/closing timing, and exhaust valve opening/closing timing, may be used as the operating conditions for the reference value.
- the torque characteristic data for the reference value may be a combination of multiple map data, or may be calculated from a mathematical model using a neural network.
- the error learning unit 542 updates the torque error learning value ⁇ lrn based on the deviation ⁇ est between the estimated torque ⁇ est and a reference value ⁇ estref of the estimated torque.
- the error learning unit 542 performs statistical processing on the deviation ⁇ est to update the torque error learning value ⁇ lrn. For example, low-pass filter processing is performed as the statistical processing.
- the error learning unit 542 updates the torque error learning value ⁇ lrn using the following equation.
- (j) indicates the calculated value for the current update period
- (j-1) indicates the calculated value for the previous update period
- Kflt is a filter gain set to a value smaller than 1.
- the update period is set to a period in which the crankshaft rotates twice.
- a torque error learning value ⁇ lrn may be provided and updated for each of a plurality of regions set according to the operating state including at least one of the throttle opening ⁇ th, the amount of intake air in the cylinder, the amount of fuel injection, and the rotation speed Ne.
- a plurality of torque error learning values ⁇ lrn are provided and updated corresponding to a plurality of regions.
- long-term and short-term statistical processing may be performed to calculate the long-term and short-term torque error learning values.
- equation (5) is used for each of the calculation of the long-term torque error learning value and the calculation of the short-term torque error learning value, and the filter gain Kflt for the long-term torque error learning value is set to a value smaller than the filter gain Kflt for the short-term torque error learning value.
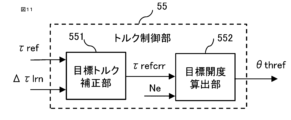
- Torque control unit 55 uses throttle torque characteristic data in which the relationship between at least the output torque ⁇ of the internal combustion engine, the rotational speed Ne, and the throttle opening ⁇ th is preset, and calculates a target throttle opening ⁇ thref based on the target torque ⁇ ref of the internal combustion engine, the current rotational speed Ne, and the torque error learning value ⁇ lrn, such that the output torque ⁇ of the internal combustion engine taking into account the torque error learning value ⁇ lrn approaches the target torque ⁇ ref.
- the torque control unit 55 includes a target torque correction unit 551 and a target opening calculation unit 552.
- the target torque correction unit 551 corrects the target torque ⁇ ref based on the torque error learning value ⁇ lrn to calculate a corrected target torque ⁇ refcrr.
- the target opening calculation unit 552 refers to throttle torque characteristic data in which the relationship between at least the output torque ⁇ of the internal combustion engine, the rotation speed Ne, and the throttle opening ⁇ th is preset, and calculates the corrected target torque ⁇ refcrr as the output torque ⁇ , and the throttle opening ⁇ th corresponding to the current rotation speed Ne as the target throttle opening ⁇ thref.
- the target torque ⁇ ref is corrected using the torque error learning value ⁇ lrn, and the corrected target torque ⁇ refcrr is calculated, thereby compensating for the output torque error due to deviations in the throttle torque characteristic data caused by individual variations in the internal combustion engine 1, aging (engine deterioration), etc., and enabling the output torque ⁇ of the internal combustion engine to approach the target torque ⁇ ref with high accuracy.
- the target torque correction unit 551 corrects the target torque ⁇ ref based on the torque error learning value ⁇ lrn to calculate a corrected target torque ⁇ refcrr.
- the target torque correction unit 551 calculates the corrected target torque ⁇ refcrr by using the following equation.
- the target torque correction unit 551 may calculate the correction coefficient K ⁇ based on operating conditions for the correction coefficient, which include at least one of the throttle opening ⁇ th, the amount of air intake into the cylinder, the amount of fuel injection, and the rotation speed Ne, and may calculate the corrected target torque ⁇ refcrr by adding the product of the torque error learning value ⁇ lrn and the correction coefficient K ⁇ to the target torque ⁇ ref, as shown in the following equation.
- the correction accuracy can be improved by multiplying the torque error learning value ⁇ lrn by the correction coefficient K ⁇ .
- the correction coefficient K ⁇ can be calculated based on the operating conditions for the correction coefficient, and the correction accuracy can be improved by multiplying the torque error learning value ⁇ lrn by the correction coefficient K ⁇ .
- the target torque correction unit 551 refers to correction coefficient setting data in which the relationship between the operating state for the correction coefficient and the correction coefficient K ⁇ is preset, and calculates the correction coefficient K ⁇ corresponding to the current operating state for the correction coefficient.
- the correction coefficient setting data is configured in the same manner as the torque characteristic data for the reference value, and map data, for example, is used.
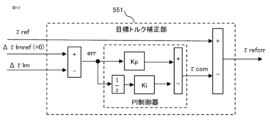
- the target torque correction unit 551 may calculate a torque correction value ⁇ com using feedback control such as PI (Proportional-Integral) control so that the torque error learning value ⁇ lrn approaches the target learning value ⁇ lrnref (usually 0) over time, correct the target torque ⁇ ref using the torque correction value ⁇ com, and calculate the corrected target torque ⁇ refcrr.
- PI Proportional-Integral
- FIG. 12 shows an example in which PI control is used in the target torque correction unit 551.
- s is a Laplace operator, and 1/s represents integration.
- the target torque correction unit 551 calculates the deviation err between the torque error learning value ⁇ lrn and the target learning value ⁇ lrnref (0 in this example), and performs PI control on the deviation err to calculate the torque correction value ⁇ com. Then, the target torque correction unit 551 subtracts the torque correction value ⁇ com from the target torque ⁇ ref to calculate the corrected target torque ⁇ refcrr.
- the calculation in FIG. 12 is expressed by equations (8) and (9).
- (j) indicates the calculated value of the current update period as described above
- (j-1) indicates the calculated value of the previous update period.
- Kp and Ki are the proportional gain and integral gain of the PI controller, respectively.
- the torque correction value ⁇ com that corrects the target torque ⁇ ref is updated at each update period by feedback control such as PI control, so that the torque error learning value ⁇ lrn can be converged to the target learning value ⁇ lrnref (0 in this example) over time. This makes it possible to obtain the output torque ⁇ of the internal combustion engine 1 with reduced variation.
- the target opening calculation unit 552 refers to throttle torque characteristic data in which the relationship between at least the output torque ⁇ of the internal combustion engine, the rotational speed Ne, and the throttle opening ⁇ th is preset, and calculates a corrected target torque ⁇ refcrr as the output torque ⁇ , and the throttle opening ⁇ th corresponding to the current rotational speed Ne as the target throttle opening ⁇ thref.
- the throttle torque characteristic data used here is similar to the throttle torque characteristic data used by the reference value calculation unit 541, and the same data may be used.
- the throttle torque characteristic data is map data in which the relationship between the output torque ⁇ , the rotation speed Ne, and the throttle opening ⁇ th is preset.
- the corrected target torque ⁇ refcrr is input to the output torque ⁇ of the map data
- the current rotation speed Ne is input to the rotation speed Ne of the map data
- the throttle opening ⁇ th set in the map data corresponding to the output torque ⁇ corresponding to the corrected target torque ⁇ refcrr and the rotation speed Ne corresponding to the current rotation speed Ne is calculated
- the calculated throttle opening ⁇ th is calculated as the target throttle opening ⁇ thref.
- Throttle control unit 56 The throttle control unit 56 controls the throttle opening ⁇ th based on the target throttle opening ⁇ thref. In this embodiment, the throttle control unit 56 controls the drive of the electric motor of the throttle valve 4 so that the throttle opening ⁇ th detected based on the output signal of the throttle opening sensor 19 approaches the target throttle opening ⁇ thref.
- FIG. 13 is a functional block diagram showing the operation of the control device 50 according to this embodiment. Description of the same components as those in the first embodiment will be omitted.
- the basic configuration of the control device 50 according to this embodiment is the same as that of the first embodiment. In this embodiment, part of the processing of the torque control unit 55 is different from that in the first embodiment.
- the torque control unit 55 includes a target opening calculation unit 552 and a target opening correction unit 553.
- the target opening calculation unit 552 refers to throttle torque characteristic data in which the relationship between at least the output torque ⁇ of the internal combustion engine, the rotation speed Ne, and the throttle opening ⁇ th is preset, and calculates the target torque ⁇ ref as the output torque ⁇ , and the throttle opening ⁇ th corresponding to the current rotation speed Ne as the pre-correction target throttle opening ⁇ threfbf.
- the throttle torque characteristic data used here is similar to the throttle torque characteristic data used in the reference value calculation unit 541 in the first embodiment, and the same data may be used.
- the throttle torque characteristic data is map data in which the relationships between the output torque ⁇ , the rotation speed Ne, and the throttle opening ⁇ th are preset.
- the target torque ⁇ ref is input to the output torque ⁇ of the map data
- the current rotation speed Ne is input to the rotation speed Ne of the map data
- the throttle opening ⁇ th set in the map data corresponding to the output torque ⁇ corresponding to the target torque ⁇ ref and the rotation speed Ne corresponding to the current rotation speed Ne is calculated
- the calculated throttle opening ⁇ th is calculated as the target throttle opening ⁇ threfbf before correction.
- the target opening correction unit 553 corrects the pre-correction target throttle opening ⁇ thref based on the torque error learning value ⁇ lrn to calculate the target throttle opening ⁇ thref.
- the torque error learning value ⁇ lrn is used to correct the pre-correction target throttle opening ⁇ thref corresponding to the target torque ⁇ ref, and the target throttle opening ⁇ thref is calculated. This compensates for the output torque error due to deviations in the throttle torque characteristic data caused by individual variations in the internal combustion engine 1, aging, etc., and allows the output torque ⁇ of the internal combustion engine to approach the target torque ⁇ ref with high accuracy.
- the target opening correction unit 553 calculates a conversion coefficient Kcnv based on operating conditions for the conversion coefficient including at least one of the throttle opening ⁇ th, the amount of intake air in the cylinder, the amount of fuel injection, and the rotation speed Ne, and calculates, as the target throttle opening ⁇ thref, a value obtained by adding the product of the torque error learning value ⁇ lrn and the conversion coefficient Kcnv to the target throttle opening ⁇ threfbf before correction, as shown in the following equation:
- the conversion coefficient Kcnv is a conversion coefficient that converts the torque deviation into a throttle opening deviation that causes the torque deviation.
- the target opening correction unit 553 refers to conversion factor setting data in which the relationship between the operating state for the conversion factor and the conversion factor Kcnv is preset, and calculates the conversion factor Kcnv that corresponds to the current operating state for the conversion factor.
- the conversion factor setting data is configured in the same way as the torque characteristic data for the reference value, and map data is used, for example.
- the target opening correction unit 553 may calculate the throttle opening correction value ⁇ thcom using feedback control such as PI (Proportional-Integral) control so that the torque error learning value ⁇ lrn approaches the target learning value ⁇ lrnref (usually 0) over time, and may calculate the target throttle opening ⁇ thref by correcting the pre-correction target throttle opening ⁇ threfbf using the throttle opening correction value ⁇ thcom.
- feedback control such as PI (Proportional-Integral) control so that the torque error learning value ⁇ lrn approaches the target learning value ⁇ lrnref (usually 0) over time
- PI Proportional-Integral
- the target opening correction unit 553 calculates the deviation err between the torque error learning value ⁇ lrn and the target learning value ⁇ lrnref (0 in this example), and performs PI control on the deviation err to calculate the throttle opening correction value ⁇ thcom. Then, the target opening correction unit 553 subtracts the throttle opening correction value ⁇ thcom from the target throttle opening ⁇ threfbf before correction to calculate the target throttle opening ⁇ thref.
- (j) indicates the calculated value in the current update period, as described above, and (j-1) indicates the calculated value in the previous update period.
- Kp2 and Ki2 are the proportional gain and integral gain of the PI controller, respectively.
- the throttle opening correction value ⁇ thcom which corrects the pre-correction target throttle opening ⁇ threfbf, is updated by feedback control such as PI control at each update cycle, so that the torque error learning value ⁇ lrn can be converged to the target learning value ⁇ lrnref (0 in this example) over time. This makes it possible to obtain the output torque ⁇ of the internal combustion engine 1 with reduced variation.
- FIG. 15 is a functional block diagram showing the operation of the control device 50 according to this embodiment. Description of components similar to those in the first or second embodiment will be omitted.
- the basic configuration of the control device 50 according to this embodiment is similar to that of the first or second embodiment. In this embodiment, part of the processing of the learning value calculation unit 54 differs from that of the first or second embodiment.
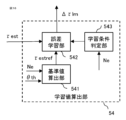
- the learning value calculation unit 54 includes a learning condition determination unit 543 in addition to a reference value calculation unit 541 and an error learning unit 542.
- the learning condition determination unit 543 determines whether the learning condition is met based on the operating state for learning determination, which includes at least one of the throttle opening ⁇ th, the amount of intake air in the cylinder, the amount of fuel injection, and the rotation speed Ne.
- the error learning unit 542 updates the torque error learning value ⁇ lrn based on the deviation ⁇ est.
- the learning condition determination unit 543 may use one or a combination of environmental conditions such as intake air temperature, cooling water temperature, and atmospheric pressure, and the operating conditions of the power transmission mechanisms such as gears and clutches to which the crankshaft of the internal combustion engine 1 is connected, as conditions for determining whether the learning conditions are met.
- the learning condition determination unit 543 determines that the learning condition is met when the rotation speed Ne passes a preset determination rotation speed Thne while the rotation speed Ne is increasing.
- the rotation speed Ne When the rotation speed Ne is accelerating and decelerating, the torque of the internal combustion engine is increasing and decreasing in a transient state, and learning in this transient state is likely to result in a decrease in learning accuracy.
- the rotation speed Ne When the rotation speed Ne is continuously increasing, the torque does not increase or decrease much and is stable, so learning accuracy can be improved.
- the internal combustion engine has a smaller output and lower inertia than a four-wheeled vehicle, so learning accuracy is likely to decrease due to variable factors, but the above configuration makes it possible to suppress the decrease in learning accuracy.
- the learning condition determination unit 543 determines that the learning condition is met when the rotation speed Ne increases continuously during the determination period Tjd and the rotation speed Ne passes the determination rotation speed Thne.
- the learning condition determination unit 543 may determine that the learning condition is met when the rotation speed Ne increases continuously within a preset increase rate range during the determination period Tjd and the rotation speed Ne passes the determination rotation speed Thne.
- the learning condition determination unit 543 may determine that the learning condition is met by, in addition to the condition for the rotation speed Ne, a condition that the cooling water temperature is equal to or higher than a preset temperature.
- Figure 17 The behavior during learning will be described using Figures 17 and 18. First, Figure 17 will be described.
- the estimated torque ⁇ est matches the reference value ⁇ estref of the estimated torque, and the deviation ⁇ est is close to zero.
- the throttle opening ⁇ th increases, the torque increases, and the rotation speed Ne increases continuously. While the rotation speed Ne is increasing, at time t01, the rotation speed Ne passes the judgment rotation speed Thne, and the learning condition is met.
- the deviation ⁇ est when the learning condition is met is learned as the torque error learning value ⁇ lrn.
- FIG. 18 the internal combustion engine is in a state where there is individual variation and aging, the estimated torque ⁇ est exceeds the reference value ⁇ estref of the estimated torque, and the deviation ⁇ est is smaller than zero.
- the throttle opening ⁇ th increases, the torque increases, and the rotation speed Ne increases continuously. While the rotation speed Ne is increasing, at time t01, the rotation speed Ne passes the judgment rotation speed Thne, and the learning condition is met.
- the deviation ⁇ est when the learning condition is met is learned as the torque error learning value ⁇ lrn.
- the average value of the deviation ⁇ est multiple times may be learned as the torque error learning value ⁇ lrn.
- control device 50 stores the torque error learning value ⁇ lrn for one or more times in a non-volatile storage device such as an EEPROM before the internal combustion engine 1 stops and the processing operation is terminated. Then, when the control device 50 is started again, it reads out the torque error learning value ⁇ lrn stored in the storage device. As a result, even after restarting, the control device 50 can calculate the target throttle opening ⁇ thref using the torque error learning value ⁇ lrn learned up to the previous time. Therefore, it is possible to compensate for the output torque error due to deviations in the throttle torque characteristic data caused by individual variations in the internal combustion engine 1, aging, etc., and to accurately bring the output torque ⁇ of the internal combustion engine close to the target torque ⁇ ref.
- a non-volatile storage device such as an EEPROM
- control device 50 according to a fourth embodiment will be described with reference to the drawings. Descriptions of components similar to those of the first, second, or third embodiment will be omitted.
- the control device 50 includes a second estimated torque calculation unit 57 and a second estimated torque correction unit 58 in addition to processing units such as a rotation information detection unit 51, a target torque calculation unit 52, an estimated torque calculation unit 53, a learning value calculation unit 54, a torque control unit 55, and a throttle control unit 56.
- processing units such as a rotation information detection unit 51, a target torque calculation unit 52, an estimated torque calculation unit 53, a learning value calculation unit 54, a torque control unit 55, and a throttle control unit 56.
- part of the processing of the torque control unit 55 differs from that in embodiments 1, 2, or 3.
- Each processing unit 51 to 58 of the control device 50 is realized by a processing circuit provided in the control device 50, as in embodiment 1.
- the second estimated torque calculation unit 57 uses torque characteristic data for the second estimated torque, in which the relationship between the operating state for the torque characteristic data, which includes at least one of the throttle opening ⁇ th, the amount of air intake into the cylinder, the amount of fuel injection, and the rotation speed Ne, and the second estimated torque ⁇ est2 as the output torque ⁇ of the internal combustion engine, is preset, to calculate the second estimated torque ⁇ est2 corresponding to the current operating state for the torque characteristic data.
- the second estimated torque ⁇ est2 is the torque output from the crankshaft to the outside of the internal combustion engine, is the average output torque during the stroke period, and corresponds to the target torque ⁇ ref. Therefore, the torque characteristic data for the second estimated torque is handled as data different from the torque characteristic data for the reference value used by the learning value calculation unit 54.
- the torque characteristic data for the second estimated torque is map data in which the relationship between the throttle opening ⁇ th, the rotation speed Ne, and the second estimated torque ⁇ est2 is preset.
- the second estimated torque calculation unit 57 refers to the torque characteristic data for the second estimated torque and calculates the second estimated torque ⁇ est2 corresponding to the current throttle opening ⁇ th and the rotation speed Ne.
- the amount of intake air in the cylinder, the amount of fuel injection, or the target torque ⁇ ref may be used instead of the throttle opening ⁇ th.
- the rotation speed Ne and parameters correlated with the output torque ⁇ such as the amount of intake air in the cylinder, the amount of fuel injection, or the target torque ⁇ ref, may be used as the operating state for the reference value.
- various operating conditions of the internal combustion engine that are correlated with the output torque ⁇ such as the EGR rate, ignition timing, intake valve opening/closing timing, and exhaust valve opening/closing timing, may be used as the operating conditions for the torque characteristic data.
- the torque characteristic data for the second estimated torque may be a combination of multiple map data, or may be calculated from a mathematical model using a neural network.
- the second estimated torque correcting unit 58 corrects the second estimated torque ⁇ est2 with the torque error learned value ⁇ lrn to calculate a corrected second estimated torque ⁇ est2crr.
- the second estimated torque correcting unit 58 calculates the corrected second estimated torque ⁇ est2crr by using the following equation.
- the second estimated torque ⁇ est2 calculated by referring to preset torque characteristic data for the second estimated torque is corrected by the torque error learning value ⁇ lrn, which has learned the torque variations caused by the individual variations of the internal combustion engine 1, changes over time (engine deterioration), etc., and the corrected second estimated torque ⁇ est2crr is calculated, thereby making it possible to calculate an accurate torque estimate that reflects the torque variations caused by the individual variations of the internal combustion engine 1, changes over time (engine deterioration), etc.
- the second estimated torque correction unit 58 may calculate the correction coefficient K ⁇ est based on operating conditions for a correction coefficient including at least one of the throttle opening ⁇ th, the amount of air intake into the cylinder, the amount of fuel injection, and the rotation speed Ne, and may calculate the corrected second estimated torque ⁇ est2crr by adding the multiplied value of the torque error learning value ⁇ lrn and the correction coefficient K ⁇ est to the second estimated torque ⁇ est2, as shown in the following equation.
- the degree of influence of the torque error learning value ⁇ lrn on the estimated torque changes depending on the operating state, so the correction accuracy can be improved by multiplying the torque error learning value ⁇ lrn by the correction coefficient K ⁇ est.
- the proportional coefficient of the average output torque ⁇ during the stroke period to the maximum value or increase in the instantaneous torque increased by combustion changes depending on the operating state, so the correction coefficient K ⁇ est is calculated based on the operating state for the correction coefficient, and the correction accuracy can be improved by multiplying the torque error learning value ⁇ lrn by the correction coefficient K ⁇ est.
- the second estimated torque correction unit 58 refers to correction coefficient setting data in which the relationship between the driving state for the correction coefficient and the correction coefficient K ⁇ est is preset, and calculates the correction coefficient K ⁇ est corresponding to the current driving state for the correction coefficient.
- the correction coefficient setting data is configured in the same manner as the torque characteristic data for the reference value, and for example, map data is used.
- the torque control unit 55 uses throttle torque characteristic data in which the relationship between at least the output torque ⁇ of the internal combustion engine, the rotation speed Ne, and the throttle opening ⁇ th is preset, and calculates the target throttle opening ⁇ thref based on the target torque ⁇ ref of the internal combustion engine, the current rotation speed Ne, and the corrected second estimated torque ⁇ est2crr so that the corrected second estimated torque ⁇ est2crr approaches the target torque ⁇ ref.
- the torque control unit 55 includes a target torque correction unit 551 and a target opening calculation unit 552.
- the target torque correction unit 551 calculates the corrected target torque ⁇ refcrr by feedback control such as PI (Proportional-Integral) control so that the corrected second estimated torque ⁇ est2crr approaches the target torque ⁇ ref over time.
- PI Proportional-Integral
- the target torque correction unit 551 calculates the torque deviation ⁇ err between the corrected second estimated torque ⁇ est2crr and the target torque ⁇ ref, and performs PI control on the torque deviation ⁇ err to calculate the torque correction value ⁇ com2. Then, the target torque correction unit 551 subtracts the torque correction value ⁇ com2 from the target torque ⁇ ref to calculate the corrected target torque ⁇ refcrr.
- (j) indicates the calculated value in the current update period as described above
- (j-1) indicates the calculated value in the previous update period.
- Kp3 and Ki3 are the proportional gain and integral gain of the PI controller, respectively.
- the torque correction value ⁇ com that corrects the target torque ⁇ ref is updated by feedback control such as PI control at each update period, so that the corrected second estimated torque ⁇ est2crr can be converged to the target torque ⁇ ref over time. This makes it possible to obtain the output torque ⁇ of the internal combustion engine 1 with reduced variation.
- the target opening calculation unit 552 refers to throttle torque characteristic data in which the relationship between at least the output torque ⁇ of the internal combustion engine, the rotation speed Ne, and the throttle opening ⁇ th is preset, and calculates the corrected target torque ⁇ refcrr as the output torque ⁇ , and the throttle opening ⁇ th corresponding to the current rotation speed Ne as the target throttle opening ⁇ thref.
- the configuration of the target opening calculation unit 552 is the same as in the first embodiment, so a description thereof will be omitted.
- control device 50 calculates the target throttle opening ⁇ thref using the torque error learning value ⁇ lrn, the corrected second estimated torque ⁇ est2crr, etc., so that the output torque ⁇ of the internal combustion engine 1 approaches the target torque ⁇ ref.
- control device 50 may transmit the torque error learning value ⁇ lrn, the corrected second estimated torque ⁇ est2crr, etc. to an external control device such as a vehicle control device or a motor control device, and reflect them in the torque control of the external control device.
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Computer Hardware Design (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Combined Controls Of Internal Combustion Engines (AREA)
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2024558520A JPWO2024105759A1 (https=) | 2022-11-15 | 2022-11-15 | |
| PCT/JP2022/042329 WO2024105759A1 (ja) | 2022-11-15 | 2022-11-15 | 内燃機関の制御装置 |
| JP2026009396A JP2026065193A (ja) | 2022-11-15 | 2026-01-23 | 内燃機関の制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2022/042329 WO2024105759A1 (ja) | 2022-11-15 | 2022-11-15 | 内燃機関の制御装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2024105759A1 true WO2024105759A1 (ja) | 2024-05-23 |
Family
ID=91083947
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2022/042329 Ceased WO2024105759A1 (ja) | 2022-11-15 | 2022-11-15 | 内燃機関の制御装置 |
Country Status (2)
| Country | Link |
|---|---|
| JP (2) | JPWO2024105759A1 (https=) |
| WO (1) | WO2024105759A1 (https=) |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001221091A (ja) * | 2000-02-10 | 2001-08-17 | Denso Corp | 筒内噴射式内燃機関の制御装置 |
| JP2009023578A (ja) * | 2007-07-23 | 2009-02-05 | Toyota Motor Corp | ハイブリッド車両の制御装置 |
| JP2014066147A (ja) * | 2012-09-25 | 2014-04-17 | Honda Motor Co Ltd | 内燃機関の制御装置 |
| JP2019143636A (ja) * | 2019-04-12 | 2019-08-29 | 三菱電機株式会社 | 内燃機関の制御装置及び制御方法 |
| JP2022164168A (ja) * | 2021-04-16 | 2022-10-27 | 三菱電機株式会社 | 内燃機関の制御装置及び制御方法 |
-
2022
- 2022-11-15 JP JP2024558520A patent/JPWO2024105759A1/ja active Pending
- 2022-11-15 WO PCT/JP2022/042329 patent/WO2024105759A1/ja not_active Ceased
-
2026
- 2026-01-23 JP JP2026009396A patent/JP2026065193A/ja active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001221091A (ja) * | 2000-02-10 | 2001-08-17 | Denso Corp | 筒内噴射式内燃機関の制御装置 |
| JP2009023578A (ja) * | 2007-07-23 | 2009-02-05 | Toyota Motor Corp | ハイブリッド車両の制御装置 |
| JP2014066147A (ja) * | 2012-09-25 | 2014-04-17 | Honda Motor Co Ltd | 内燃機関の制御装置 |
| JP2019143636A (ja) * | 2019-04-12 | 2019-08-29 | 三菱電機株式会社 | 内燃機関の制御装置及び制御方法 |
| JP2022164168A (ja) * | 2021-04-16 | 2022-10-27 | 三菱電機株式会社 | 内燃機関の制御装置及び制御方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2024105759A1 (https=) | 2024-05-23 |
| JP2026065193A (ja) | 2026-04-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4066971B2 (ja) | 内燃機関の制御装置 | |
| JP4923600B2 (ja) | 内燃機関の停止位置制御装置 | |
| CN113006999A (zh) | 内燃机的控制装置及控制方法 | |
| EP2602461B1 (en) | Control system for internal combustion engine | |
| JP4567950B2 (ja) | 内燃機関の制御装置 | |
| JP4666286B2 (ja) | エンジン回転停止制御装置 | |
| US20220333538A1 (en) | Controller and control method for internal combustion engine | |
| US11480121B2 (en) | Controller and control method for internal combustion engine | |
| US9115655B2 (en) | Cylinder pressure parameter correction systems and methods | |
| WO2023199532A1 (ja) | 内燃機関の制御装置 | |
| US11555462B2 (en) | Controller and control method for internal combustion engine | |
| CN113623082A (zh) | 内燃机的控制装置及控制方法 | |
| JP2008215320A (ja) | トルク制御装置 | |
| JP4811741B2 (ja) | エンジン回転停止制御装置 | |
| JP5461049B2 (ja) | エンジン制御装置 | |
| US20230184187A1 (en) | Controller for internal combustion engine | |
| WO2024105759A1 (ja) | 内燃機関の制御装置 | |
| JP7621562B2 (ja) | 内燃機関のトルク推定装置 | |
| US20220373431A1 (en) | Controller for internal combustion engine | |
| US20230184186A1 (en) | Controller for internal combustion engine | |
| JP7756839B2 (ja) | 内燃機関の制御装置 | |
| WO2025187039A1 (ja) | 内燃機関の制御装置 | |
| JPWO2024105759A5 (https=) | ||
| WO2025182061A1 (ja) | 内燃機関の制御装置 | |
| WO2025197019A1 (ja) | 内燃機関の制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 22965735 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2024558520 Country of ref document: JP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 22965735 Country of ref document: EP Kind code of ref document: A1 |