WO2024069830A1 - 回転電機およびその製造方法 - Google Patents
回転電機およびその製造方法 Download PDFInfo
- Publication number
- WO2024069830A1 WO2024069830A1 PCT/JP2022/036342 JP2022036342W WO2024069830A1 WO 2024069830 A1 WO2024069830 A1 WO 2024069830A1 JP 2022036342 W JP2022036342 W JP 2022036342W WO 2024069830 A1 WO2024069830 A1 WO 2024069830A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- circuit board
- board
- connector
- electric machine
- rotating electric
- Prior art date
Links
- 238000004519 manufacturing process Methods 0.000 title claims description 35
- 238000000034 method Methods 0.000 title claims description 26
- 125000006850 spacer group Chemical group 0.000 claims description 34
- 238000004804 winding Methods 0.000 claims description 19
- 230000005540 biological transmission Effects 0.000 claims description 12
- 239000004519 grease Substances 0.000 claims description 12
- 230000000149 penetrating effect Effects 0.000 claims description 5
- 239000000758 substrate Substances 0.000 claims description 4
- 238000003825 pressing Methods 0.000 description 10
- 210000000078 claw Anatomy 0.000 description 6
- 238000010586 diagram Methods 0.000 description 6
- 238000003780 insertion Methods 0.000 description 6
- 230000037431 insertion Effects 0.000 description 6
- 239000004020 conductor Substances 0.000 description 4
- 238000001514 detection method Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 230000017525 heat dissipation Effects 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 239000003990 capacitor Substances 0.000 description 1
- 238000009499 grossing Methods 0.000 description 1
- 230000002452 interceptive effect Effects 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 238000005476 soldering Methods 0.000 description 1
- 238000003892 spreading Methods 0.000 description 1
- 238000003466 welding Methods 0.000 description 1
Images

















Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K11/00—Structural association of dynamo-electric machines with electric components or with devices for shielding, monitoring or protection
- H02K11/30—Structural association with control circuits or drive circuits
- H02K11/33—Drive circuits, e.g. power electronics
Definitions
- This disclosure relates to a rotating electric machine and a manufacturing method thereof.
- the rotating electric machine disclosed in Patent Document 1 has a motor with a rotating shaft and a control unit that controls the motor.
- the control unit includes a first circuit board and a second circuit board arranged side by side in the axial direction of the rotating shaft, a spacer provided between the first circuit board and the second circuit board, and a connector assembly connected to the first and second circuit boards.
- the connector assembly, the second circuit board, the spacer, and the first circuit board are arranged in this order in the axial direction, and a shared fixing member is inserted through the connector assembly, the second circuit board, the spacer, and the first circuit board.
- the connector assembly, the second circuit board, the spacer, and the first circuit board are fixed to the heat sink by fixing an end of the shared fixing member to the heat sink.
- the first circuit board and the second circuit board cannot be fixed until they are fixed with the shared fixing member, making it difficult to assemble the first circuit board and the second circuit board to the heat sink with high precision. If the first circuit board and the second circuit board are temporarily fixed to the heat sink one by one before being fixed with the shared fixing member in order to improve assembly precision, the manufacture of the rotating electric machine becomes complicated and the manufacturing costs increase.
- the present disclosure has been made to solve the problems described above, and aims to provide a rotating electric machine and a manufacturing method thereof that allows the first circuit board and the second circuit board to be assembled with high precision and that can be manufactured easily and at low cost.
- the rotating electric machine includes a motor having a rotating shaft and a control unit for controlling the motor, the control unit includes a board unit having a first circuit board and a second circuit board, a holding member disposed between the first circuit board and the second circuit board and holding the first circuit board and the second circuit board, a heat sink disposed between the motor and the board unit so as to face the first circuit board in the axial direction of the rotating shaft, and a fastening member for fixing the board unit to the heat sink, the holding member having a base, a first locking portion connected to the base and locking the first circuit board from a second surface of the first circuit board opposite to a first surface facing the base, and a second locking portion connected to the base and locking the second circuit board from a fourth surface of the second circuit board opposite to a third surface facing the base, the fastening member penetrating the board unit in the axial direction and fastened to the heat sink.
- the manufacturing method of the rotating electric machine according to the present disclosure includes a board unit assembly process in which a first circuit board and a second circuit board are held by a holding member to assemble a board unit, and a board unit fixing process in which a fastening member is passed through the board unit in the axial direction of the rotating shaft of the motor and the fastening member is fastened to the heat sink to fix the board unit to the heat sink.
- This disclosure provides a rotating electric machine and a manufacturing method thereof that allows the first circuit board and the second circuit board to be assembled with high precision and that can be manufactured easily and at low cost.
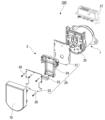
- FIG. 1 is an exploded perspective view of a rotating electric machine according to a first embodiment; 1 is a schematic cross-sectional view of a rotating electric machine according to a first embodiment.
- FIG. 2 is a perspective view of a first circuit board according to the first embodiment.
- FIG. 4 is a perspective view of a second circuit board according to the first embodiment.
- FIG. 2 is a perspective view of a holding member according to the first embodiment.
- FIG. 2 is a perspective view of a substrate unit according to the first embodiment.
- FIG. 2 is a perspective view of a heat sink according to the first embodiment.
- 1 is a perspective view of a connector according to a first embodiment.
- FIG. 4A to 4C are diagrams illustrating a manufacturing method of a rotating electric machine in the first embodiment.
- 4A to 4C are diagrams illustrating a manufacturing method of a rotating electric machine in the first embodiment.
- 4A to 4C are diagrams illustrating a manufacturing method of a rotating electric machine in the first embodiment.
- 4A to 4C are diagrams illustrating a manufacturing method of a rotating electric machine in the first embodiment.
- 4A to 4C are diagrams illustrating a manufacturing method of a rotating electric machine in the first embodiment.
- 4A to 4C are diagrams illustrating a manufacturing method of a rotating electric machine in the first embodiment.
- 11 is a perspective view of an intermediate structure of a rotating electric machine according to a second embodiment, as viewed from below.
- FIG. 11 is a cross-sectional view taken along line AA in FIG. 10.
- FIG. 11 is a perspective view of a first circuit board according to a second embodiment.
- FIG. 11 is a perspective view of a second circuit board according to the second embodiment.
- FIG. 11 is a perspective view of a holding member according to a second embodiment.
- FIG. 13 is a perspective view of a holding member in a modified example of the second embodiment.
- FIG. 11 is a schematic cross-sectional view of a rotating electric machine according to a third embodiment.
- Fig. 1 is an exploded perspective view of a rotating electric machine 100 according to the first embodiment.
- Fig. 2 is a schematic cross-sectional view of the rotating electric machine 100.
- the rotating electric machine 100 includes a multi-phase winding type motor 1 and a control unit 2 that controls the motor 1.
- the control unit 2 includes a first circuit board 21, a second circuit board 22, an inter-board connector 23, a holding member 24, a heat sink 25, a fastening member 26, and a connector assembly 27.
- the motor 1 is mainly composed of a rotating shaft 11, a rotor 12, a stator 13, a motor case 14, an armature winding 15, an annular wiring section 16, a wiring terminal 17, and first and second bearings 18a, 18b.
- the direction in which the central axis O of the rotating shaft 11 of the motor 1 extends is sometimes referred to as the axial direction.
- the motor 1 and the control unit 2 are aligned in the axial direction.
- the side where the control unit 2 is located is sometimes referred to as the upper side
- the side where the motor 1 is located is sometimes referred to as the lower side.
- Viewing from the axial direction is sometimes referred to as a planar view.
- the direction that intersects with the central axis O is sometimes referred to as the radial direction
- the direction going around the central axis O is sometimes referred to as the circumferential direction.
- the rotating shaft 11, the rotor 12, and the stator 13 are arranged coaxially.
- the rotating shaft 11 has an input end 11a located at an upper portion and an output end 11b located at a lower portion.
- a driven object e.g., a steering system of a vehicle
- the rotor 12 is fixed to the rotating shaft 11.
- a plurality of pairs of permanent magnets (not shown) are arranged on the outer circumferential surface of the rotor 12. These permanent magnets form field poles.
- the stator 13 is provided to surround the outer periphery of the rotor 12.
- An air gap is formed between the outer periphery of the rotor 12 and the inner periphery of the stator 13. The air gap is formed over the entire circumference in the circumferential direction.
- the motor case 14 houses the rotating shaft 11, rotor 12, and stator 13.
- the motor case 14 has a cylindrical portion 14a and a bottom portion 14b.
- the cylindrical portion 14a covers the stator 13 from the outer periphery.
- the stator 13 is fixed to the inner surface of the cylindrical portion 14a by shrink fitting or press fitting.
- the bottom portion 14b covers the lower end of the cylindrical portion 14a.
- An output side shaft through hole 14c, through which the rotating shaft 11 is inserted, is formed in the center of the bottom portion 14b in a plan view.
- the upper end of the cylindrical portion 14a is covered by the heat sink 25 of the control unit 2.
- the armature winding 15 is wound around the stator 13.
- the armature winding 15 includes a U-phase winding, a V-phase winding, and a W-phase winding.
- the annular wiring portion 16 is disposed above the stator 13.
- the annular wiring portion 16 is disposed adjacent to the armature winding 15.
- the annular wiring portion 16 is connected to an end of the armature winding 15 by TIG welding or the like.
- the wiring terminal 17 extends upward from the annular wiring portion 16, penetrating the heat sink 25.
- the wiring terminal 17 is electrically connected to an end of the armature winding 15 via the annular wiring portion 16.
- the wiring terminal 17 is composed of three conductors, and these three conductors are electrically connected to an end of the U-phase winding, an end of the V-phase winding, and an end of the W-phase winding of the armature winding 15, respectively.
- An upper end of the wiring terminal 17 is connected to a first circuit board 21 of the control unit 2.
- the input end 11a of the rotating shaft 11 is inserted into a first shaft through hole 61 formed in the heat sink 25.
- the output end 11b of the rotating shaft 11 is inserted into an output side shaft through hole 14c formed in the bottom 14b.
- a first bearing 18a is provided in the first shaft through hole 61.
- a second bearing 18b is provided in the output side shaft through hole 14c. The first bearing 18a and the second bearing 18b support the rotating shaft 11 so that it can rotate freely.
- a sensor magnet 19 is attached to the input end 11a of the rotating shaft 11.
- the sensor magnet 19 is fixed by press fitting to the end face of the input end 11a facing the axial direction.
- the sensor magnet 19 has one or more pairs of permanent magnets.
- the sensor magnet 19 rotates together with the rotating shaft 11. Therefore, the magnetic field generated by the sensor magnet 19 changes as the rotating shaft 11 rotates.
- the control unit 2 controls the motor 1. In the axial direction, the second circuit board 22, the holding member 24, the first circuit board 21, and the heat sink 25 are arranged in this order from the top.
- the first circuit board 21, the second circuit board 22, the board-to-board connector 23, and the holding member 24 form the board unit 20.
- the control unit 2 is covered from above by a cover 70.
- the cover 70 is attached to a heat sink 25.
- the board unit 20 (first circuit board 21, second circuit board 22, board-to-board connector 23, and holding member 24) is housed in a space surrounded by the cover 70 and the heat sink 25.
- the first circuit board 21 is disposed between the holding member 24 and the heat sink 25 in the axial direction.
- the first circuit board 21 has a first surface 21a and a second surface 21b.
- the first surface 21a is the upper surface of the first circuit board 21, and the second surface 21b is the lower surface of the first circuit board 21.
- the inverter circuit that drives the motor 1 is mounted on the first circuit board 21.
- the inverter circuit is composed of electronic components such as switching elements, shunt resistors, and smoothing capacitors.
- electronic components 28 which are heat-generating elements that generate heat when the motor 1 is driven, are preferably arranged on the second surface 21b of the first circuit board 21.
- the electronic components 28 are in contact with the upper surface of the heat sink 25 via thermal grease 29. Heat generated from the electronic components 28 is dissipated to the heat sink 25 via the thermal grease 29.
- the electronic components 28 may also be arranged on the first surface 21a of the first circuit board 21.
- FIG. 3 is a perspective view from above of the first circuit board 21.
- first direction D1 one direction in a plane along the first surface 21a of the first circuit board 21
- second direction D2 a direction perpendicular to the first direction D1 in the above plane.
- the first direction D1 and the second direction D2 are perpendicular to the axial direction.
- the first circuit board 21 is provided with a second shaft through hole 31, a motor terminal connection hole 32 (motor connection portion), a first fastening through hole 33, a first positioning through hole 34, a connector terminal connection hole 35 (first connector connection portion), and a connector positioning through hole 37.
- the second shaft through hole 31 passes through the first circuit board 21 in the axial direction.
- the second shaft through hole 31 is positioned so as to overlap with the output side shaft through hole 14c in a plan view.
- the input end 11a of the rotating shaft 11 is inserted into the second shaft through hole 31.
- the motor terminal connection holes 32 penetrate the first circuit board 21 in the axial direction.
- the motor terminal connection holes 32 are provided at the end of the first circuit board 21 in the second direction D2.
- the three motor terminal connection holes 32 are arranged side by side in the first direction D1.
- the three motor terminal connection holes 32 are respectively connected to the three conductors of the wiring terminal 17.
- the first fastening through holes 33 pass through the first circuit board 21 in the axial direction.
- the first fastening through holes 33 are provided on the outer edge of the first circuit board 21.
- a plurality of first fastening through holes 33 are provided on both ends of the first circuit board 21 in the first direction D1 and both ends of the second direction D2.
- the fastening members 26 are inserted into the first fastening through holes 33.
- the first positioning through hole 34 penetrates the first circuit board 21 in the axial direction.
- the first positioning through hole 34 is provided on the outer edge of the first circuit board 21.
- a pair of first positioning through holes 34 are provided on both ends of the first circuit board 21 in the second direction D2.
- a first positioning protrusion 55 of the retaining member 24, which will be described later, is inserted into the first positioning through hole 34.
- the connector terminal connection holes 35 penetrate the first circuit board 21 in the axial direction.
- the connector terminal connection holes 35 are provided at one end of the first circuit board 21 in the first direction D1.
- multiple connector terminal connection holes 35 are arranged side by side in the second direction D2.
- the connector terminal connection holes 35 are connected to press-fit terminals 74 of the connector assembly 27, which will be described later.
- the connector positioning through holes 37 penetrate the first circuit board 21 in the axial direction.
- the connector positioning through holes 37 are provided at one end of the first circuit board 21 in the first direction D1.
- a pair of connector positioning through holes 37 are provided so as to be positioned on both sides of the multiple connector terminal connection holes 35 in the second direction D2 when viewed from the first direction D1.
- a connector positioning protrusion 75 of the connector assembly 27, which will be described later, is inserted into the connector positioning through holes 37.
- the second circuit board 22 is disposed above the first circuit board 21.
- the second circuit board 22 has a third surface 22a and a fourth surface 22b.
- the third surface 22a is the lower surface of the second circuit board 22, and the fourth surface 22b is the upper surface of the second circuit board 22.
- a control circuit that controls the drive of the motor 1 is mounted on the second circuit board 22.
- the control circuit is composed of a microcontroller that calculates the drive control of the motor 1, a drive circuit used to control the switching elements, etc.
- a rotation sensor 30 is mounted on the third surface 22a of the second circuit board 22.
- the rotation sensor 30 is a magnetic sensor such as a magnetoresistive sensor (MR sensor) or a Hall sensor.
- the rotation sensor 30 is arranged coaxially with a sensor magnet 19 attached to the rotating shaft 11.
- the sensor magnet 19 and the rotation sensor 30 face each other across a gap.
- the rotation sensor 30 detects changes in the magnetic field from the permanent magnet of the sensor magnet 19, which rotates together with the rotating shaft 11, and converts it into an electrical signal.
- the sensor magnet 19 and the rotation sensor 30 detect the rotation angle of the rotating shaft 11. Note that a resolver, an optical sensor, etc. may also be used as the rotation sensor 30.
- FIG. 4 is a perspective view from above of the second circuit board 22. As shown in FIG. 4, the second circuit board 22 is provided with a second fastening through hole 41, a second positioning through hole 42, and a notch portion 43.
- the second fastening through holes 41 axially pass through the second circuit board 22.
- the second fastening through holes 41 are provided on the outer edge of the second circuit board 22.
- the multiple second fastening through holes 41 are arranged at positions that overlap the multiple first fastening through holes 33 in a plan view.
- the fastening members 26 are inserted into the second fastening through holes 41.
- the second positioning through holes 42 penetrate the second circuit board 22 in the axial direction.
- the second positioning through holes 42 are provided on the outer edge of the second circuit board 22.
- the pair of second positioning through holes 42 are arranged at positions overlapping the pair of first positioning through holes 34 in a plan view.
- the first positioning through holes 34 and the second positioning through holes 42 may be arranged at different positions in a plan view.
- a second positioning protrusion 56 of the retaining member 24, which will be described later, is inserted into the second positioning through holes 42.
- the cutout portions 43 are recessed inward from the edge of the second circuit board 22 in the second direction D2.
- a pair of cutout portions 43 are provided at both ends of the second circuit board 22 in the second direction D2.
- the cutout portions 43 are formed at positions that overlap the motor terminal connection holes 32 in a plan view. When the board unit 20 is viewed from the second circuit board 22 side along the axial direction, the cutout portions 43 expose the motor terminal connection holes 32.
- the length of the second circuit board 22 in the first direction D1 is shorter than the length of the first circuit board 21 in the first direction D1.
- the board-to-board connector 23 is disposed between the first circuit board 21 and the second circuit board 22 in the axial direction.
- the board-to-board connector 23 electrically connects the inverter circuit of the first circuit board 21 and the control circuit of the second circuit board 22.
- the board-to-board connector 23 is composed of a male connector mounted on the first circuit board 21 and a female connector mounted on the second circuit board 22. By fitting the male connector and the female connector into each other, the first circuit board 21 and the second circuit board 22 are electrically connected via the board-to-board connector 23. Note that a bent board or a connector whose terminal tips are press-fit shaped may be used as the board-to-board connector 23.
- the holding member 24 is disposed between the first circuit board 21 and the second circuit board 22 in the axial direction. With the first circuit board 21 and the second circuit board 22 electrically connected by the board-to-board connector 23, the holding member 24 holds the first circuit board 21 and the second circuit board 22, thereby assembling the board unit 20.
- Fig. 5 is a perspective view of the holding member 24 from above.
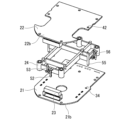
- Fig. 6 is a perspective view of the board unit 20 from below.
- the retaining member 24 has a base 51, a first locking portion 52, a second locking portion 53, a spacer 54, a first positioning protrusion 55, a second positioning protrusion 56, and a load transmission portion 57.
- the base 51 is frame-shaped with an internal space. Each member 52 to 57 of the holding member 24 is connected to the base 51.
- the internal space of the base 51 houses the electronic components mounted on the first circuit board 21 and the second circuit board 22, including the rotation sensor 30. This allows the internal space of the base 51 to be used to house the electronic components, making it possible to miniaturize the board unit 20.
- the first locking portion 52 locks the first circuit board 21 from the second surface 21b of the first circuit board 21 (i.e., the surface of the first circuit board 21 opposite the first surface 21a facing the base 51). As shown in FIG. 6, a plurality of first locking portions 52 are provided to surround the first circuit board 21.
- the first locking portion 52 has a first protrusion 52a extending downward from the base 51 (i.e., toward the first circuit board 21) and a first locking claw 52b located at the tip of the first protrusion 52a.
- the first locking claw 52b has a first locking surface facing upward. The first locking surface of the first locking claw 52b abuts against the second surface 21b of the first circuit board 21, thereby fixing the first circuit board 21 to the holding member 24 in the axial direction.
- the second locking portion 53 locks the second circuit board 22 from the fourth surface 22b of the second circuit board 22 (i.e., the surface of the second circuit board 22 opposite the third surface 22a facing the base 51).
- a plurality of second locking portions 53 are provided to surround the second circuit board 22.
- the second locking portion 53 has a second protrusion 53a extending upward from the base 51 (i.e., toward the second circuit board 22) and a second locking claw 53b located at the tip of the second protrusion 53a.
- the second locking claw 53b has a second locking surface facing downward. The second locking surface of the second locking claw 53b abuts against the fourth surface 22b of the second circuit board 22, thereby fixing the second circuit board 22 to the holding member 24 in the axial direction.
- the spacer 54 has a cylindrical shape extending in the axial direction.
- the spacers 54 are arranged at positions overlapping the first fastening through holes 33 in a plan view.
- One axial end of the spacer 54 abuts against the first circuit board 21, and the other axial end of the spacer 54 abuts against the second circuit board 22.
- the spacer 54 ensures a gap between the first circuit board 21 and the second circuit board 22.
- the spacer 54 has a third fastening through hole 54a that passes through the spacer 54 in the axial direction. The fastening member 26 is inserted through the third fastening through hole 54a.
- the second fastening through hole 41 of the second circuit board 22, the third fastening through hole 54a of the holding member 24, and the first fastening through hole 33 of the first circuit board 21 are arranged coaxially in this order from above.
- the second fastening through hole 41, the third fastening through hole 54a, and the first fastening through hole 33 are mutually connected.
- the second fastening through hole 41, the third fastening through hole 54a, and the first fastening through hole 33 are collectively referred to as the fastening through holes of the board unit 20.
- the first positioning protrusions 55 are cylindrical and extend in the axial direction. In this embodiment, a pair of first positioning protrusions 55 are provided corresponding to a pair of first positioning through holes 34. The first positioning protrusions 55 extend downward from the base 51. The first positioning protrusions 55 are inserted into the first positioning through holes 34. The first positioning protrusions 55 position the first circuit board 21 relative to the holding member 24. The height of the first positioning protrusions 55 is higher than the height of the first locking portions 52. In other words, the tip of the first positioning protrusions 55 is located lower than the tip of the first locking portions 52. Furthermore, the first positioning projections 55 are fitted into fitting holes 64 of the heat sink 25, which will be described later. This allows the board unit 20 to be positioned relative to the heat sink 25.
- the second positioning protrusions 56 are cylindrical and extend in the axial direction.
- a pair of second positioning protrusions 56 are provided corresponding to a pair of second positioning through holes 42.
- the second positioning protrusions 56 extend upward from the base 51.
- the second positioning protrusions 56 are inserted into the second positioning through holes 42.
- the second positioning protrusions 56 position the second circuit board 22 relative to the holding member 24.
- the height of the second positioning protrusions 56 is higher than the height of the second locking portions 53. That is, the tip of the second positioning protrusions 56 is located higher than the tip of the second locking portions 53.
- the first positioning protrusion 55 and the second positioning protrusion 56 are disposed at positions that overlap in a plan view. However, the first positioning protrusion 55 and the second positioning protrusion 56 may be disposed at different positions in a plan view.
- the load transmission part 57 is disposed at a position overlapping the heat dissipation grease 29 in a plan view.
- the load transmission part 57 has a first contact part 57a that contacts the first circuit board 21, a second contact part 57b that contacts the second circuit board 22, and a connection part 57c that connects the first contact part 57a and the second contact part 57b.
- the first contact part 57a is a protrusion provided on the lower surface of the base part 51.
- the second contact part 57b is a protrusion provided on the upper surface of the base part 51.
- the connection part 57c is a part of the base part 51.
- the heat sink 25 is disposed between the stator 13 and the board unit 20 (first circuit board 21) in the axial direction.
- the heat sink 25 is fitted into the cylindrical portion 14a of the motor case 14.
- the heat sink 25 covers the stator 13 from above.
- the heat sink 25 separates the space that houses the rotor 12 and stator 13 of the motor 1 from the space that houses the board unit 20 of the control unit 2.
- FIG. 7 is a perspective view of the heat sink 25 from above. As shown in FIG. 7, the heat sink 25 has a first shaft through hole 61, a motor terminal through hole 62, a fastening hole 63, and a fitting hole 64.
- the first shaft through hole 61 passes through the heat sink 25 in the axial direction.
- the first shaft through hole 61 is positioned so as to overlap with the output side shaft through hole 14c in a plan view.
- the input end 11a of the rotating shaft 11 is inserted into the first shaft through hole 61.
- the motor terminal through holes 62 penetrate the heat sink 25 in the axial direction.
- the motor terminal through holes 62 are provided at the end of the heat sink 25 in the second direction D2.
- the three motor terminal through holes 62 are arranged side by side in the first direction D1.
- the three motor terminal through holes 62 are arranged at positions overlapping with the three motor terminal connection holes 32 in a plan view.
- the three conductors of the wiring terminal 17 are inserted into the three motor terminal through holes 62, respectively.
- the size of the motor terminal through holes 62 is larger than the size of the wiring terminal 17. Therefore, when the wiring terminal 17 is inserted into the motor terminal through holes 62, contact between the wiring terminal 17 and the motor terminal through holes 62 is prevented.
- the fastening holes 63 are provided on the outer edge of the heat sink 25.
- the fastening holes 63 are recessed downward from the upper surface of the heat sink 25.
- the multiple fastening holes 63 are arranged at positions that overlap with the multiple first fastening through holes 33 in a plan view.
- the fastening members 26 are fastened to the fastening holes 63.
- the fitting holes 64 are provided on the outer edge of the heat sink 25.
- the fitting holes 64 are recessed downward from the upper surface of the heat sink 25.
- the pair of fitting holes 64 are positioned so as to overlap the pair of first positioning through holes 34 in a plan view.
- the first positioning protrusions 55 are fitted into the fitting holes 64.
- the fastening members 26 are used to fix the board unit 20 to the heat sink 25.
- multiple fastening members 26 are provided corresponding to multiple fastening through holes of the board unit 20.
- the fastening members 26 are inserted into the fastening through holes of the board unit 20 from the second circuit board 22 side and fastened to the fastening holes 63 of the heat sink 25. That is, the fastening members 26 pass axially through the board unit 20 and are fastened to the heat sink 25.
- the fastening member 26 is, for example, a screw.
- the fastening member 26 has a head that abuts against the second circuit board 22 and a shaft that extends in the axial direction from the head.
- the shaft of the fastening member 26 is inserted into a fastening through-hole of the board unit 20 and fastened to the fastening hole 63 of the heat sink 25.
- the outer shape of the head of the fastening member 26 is substantially the same as the outer shape of the spacer 54.
- the material of the fastening members 26 is preferably the same as the material of the spacer 54. In this case, it is possible to suppress changes in the fastening force of the fastening members 26 with respect to the first circuit board 21 and the second circuit board 22 due to temperature changes.
- the connector assembly 27 electrically connects the rotating electric machine 100 to an external power source, a sensor, etc.
- the connector assembly 27 is provided on the lower surface of the heat sink 25.
- the connector assembly 27 faces the first circuit board 21 via the heat sink 25.
- the connector assembly 27 is connected to the first circuit board 21. Note that in this embodiment, the connector assembly 27 is provided below the first circuit board 21, but the connector assembly 27 may also be provided above the first circuit board 21.
- FIG. 8 is a perspective view of the connector assembly 27. As shown in FIG. 8, the connector assembly 27 has a power terminal 71, a signal terminal 72, a connector holding portion 73, and a connector positioning protrusion 75.
- the power terminal 71 is connected to an external power source.
- the signal terminal 72 is connected to an external sensor, etc. Power from the external power source is supplied to the first circuit board 21 via the power terminal 71. Various signals from the external sensor, etc. are supplied to the first circuit board 21 via the signal terminal 72.
- the power terminal 71 and the signal terminal 72 are held by a connector holding portion 73.
- the ends of the power terminals 71 and the signal terminals 72 on the first circuit board 21 side are press-fit terminals 74 (first press-fit terminals).
- the press-fit terminals 74 extend from the connector holding portion 73 towards the first circuit board 21 side.
- the multiple press-fit terminals 74 are press-fitted into the multiple connector terminal connection holes 35 respectively.
- the press-fit terminals 74 come into contact with the conductive layer formed on the inner surface of the connector terminal connection holes 35, thereby electrically connecting the press-fit terminals 74 and the connector terminal connection holes 35.
- the connector positioning protrusions 75 are formed in a cylindrical shape. In this embodiment, a pair of connector positioning protrusions 75 are provided corresponding to a pair of connector positioning through holes 37.
- the connector positioning protrusions 75 extend from the connector holding portion 73 toward the first circuit board 21.
- the connector positioning protrusions 75 are inserted into the connector positioning through holes 37.
- the connector positioning protrusions 75 position the connector assembly 27 relative to the first circuit board 21.
- the height of the connector positioning protrusions 75 is greater than the height of the press-fit terminals 74. In other words, the tip of the connector positioning protrusions 75 is located closer to the first circuit board 21 than the tip of the press-fit terminals 74.
- the method for manufacturing the rotating electric machine 100 includes a board unit assembly process, a board unit fixing process, a connector attachment process, and a cover attachment process.
- the first circuit board 21 and the second circuit board 22 are held by the holding members 24 to assemble the board unit 20 .
- the first positioning protrusion 55 is inserted into the first positioning through-hole 34, and the first locking portion 52 locks the first circuit board 21 from the second surface 21b of the first circuit board 21. This fixes the first circuit board 21 to the holding member 24.
- the height of the first positioning protrusion 55 is greater than the height of the first locking portion 52. Therefore, with the first circuit board 21 positioned relative to the holding member 24 by the first positioning protrusion 55, the first circuit board 21 can be locked by the first locking portion 52.
- the second positioning protrusion 56 is inserted into the second positioning through-hole 42, and the second locking portion 53 locks the second circuit board 22 from the fourth surface 22b of the second circuit board 22. This fixes the second circuit board 22 to the holding member 24.
- the height of the second positioning protrusion 56 is greater than the height of the second locking portion 53. Therefore, with the second circuit board 22 positioned relative to the holding member 24 by the second positioning protrusion 56, the second circuit board 22 can be locked by the second locking portion 53.
- the male connector of the board-to-board connector 23 mounted on the first circuit board 21 with the female connector of the board-to-board connector 23 mounted on the second circuit board 22 the first circuit board 21 and the second circuit board 22 are electrically connected via the board-to-board connector 23.
- the board unit 20 is fixed to the heat sink 25 by fastening members 26 .
- the board unit 20 is disposed so that the first circuit board 21 faces the heat sink 25.
- the heat sink 25 is attached to the motor 1 in advance.
- the board unit 20 is placed on the upper surface of the heat sink 25.
- the first positioning protrusion 55 is fitted into the fitting hole 64 (see Fig. 9B) of the heat sink 25, thereby positioning the board unit 20 with respect to the heat sink 25.
- the wiring terminal 17 is inserted into the motor terminal connection hole 32.
- a load is applied to the second circuit board 22 toward the heat sink 25 (in the direction of the arrow in Fig.
- the connector assembly 27 is connected to the first circuit board 21 .
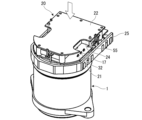
- the intermediate structure of the rotating electric machine 100 after the board unit fixing step is turned upside down.
- the connector assembly 27 is made to face the second surface 21b of the first circuit board 21.
- the connector positioning protrusions 75 (see Fig. 7) are inserted into the connector positioning through holes 37 of the first circuit board 21.
- a load is applied to the connector assembly 27 toward the first circuit board 21 (in the direction of the arrow in Fig. 9E), and the press-fit terminals 74 are press-fitted into the connector terminal connection holes 35 of the first circuit board 21.
- the height of the connector positioning protrusions 75 is greater than the height of the press-fit terminals 74.
- the press-fit terminals 74 can be press-fitted into the connector terminal connection holes 35.
- a pressing force is applied to the first circuit board 21.
- the pressing force applied to the first circuit board 21 can be received by the receiving jig. Therefore, distortion of the first circuit board 21 can be suppressed, and poor connection of the press-fit terminals 74 due to insufficient insertion of the press-fit terminals 74 into the connector terminal connection holes 35 can be prevented.
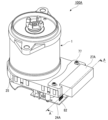
- the connector assembly 27 is screwed to the heat sink 25 using the second fastening members 77 .
- the rotating electric machine 100 includes the motor 1 having the rotating shaft 11 and the control unit 2 that controls the motor 1.
- the control unit 2 includes the board unit 20 having the first circuit board 21 and the second circuit board 22, and the holding member 24 that is arranged between the first circuit board 21 and the second circuit board 22 and holds the first circuit board 21 and the second circuit board 22, the heat sink 25 that is arranged between the motor 1 and the board unit 20 so as to face the first circuit board 21 in the axial direction, and the fastening member 26 that fixes the board unit 20 to the heat sink 25.
- the holding member 24 has a base 51, a first locking portion 52 that is connected to the base 51 and locks the first circuit board 21 from the second surface 21b of the first circuit board 21, and a second locking portion 53 that is connected to the base 51 and locks the second circuit board 22 from the fourth surface 22b of the second circuit board 22.
- the fastening member 26 passes axially through the board unit 20 and is fastened to the heat sink 25.
- the manufacturing method for the rotating electric machine 100 also includes a board unit assembly process in which the first circuit board 21 and the second circuit board 22 are held by the holding member 24 to assemble the board unit 20, and a board unit fixing process in which the fastening member 26 is passed through the board unit 20 in the axial direction and fastened to the heat sink 25, thereby fixing the board unit 20 to the heat sink 25.
- the first circuit board 21 and the second circuit board 22 are held by the holding members 24, thereby assembling the board unit 20. Thereafter, the board unit 20 is fixed to the heat sink 25 by the fastening members 26, thereby allowing the first circuit board 21 and the second circuit board 22 to be assembled to the heat sink 25 at once and with high accuracy. Since it is no longer necessary to assemble the circuit boards 21, 22 one by one, the manufacturing of the rotating electric machine 100 becomes easier. Furthermore, since the manufacturing line for the rotating electric machine 100 can be shared with the manufacturing line for a rotating electric machine in which a control unit is configured by a single circuit board, the manufacturing cost can be reduced.
- first circuit board 21 or second circuit board 22 when rotation sensor 30 that detects the rotation angle of rotating shaft 11 is mounted on first circuit board 21 or second circuit board 22, misalignment of first circuit board 21 and second circuit board 22 with respect to rotating shaft 11 may reduce the detection accuracy of rotation sensor 30. Since first circuit board 21 and second circuit board 22 can be assembled to heat sink 25 with high precision, misalignment of first circuit board 21 and second circuit board 22 with respect to rotating shaft 11 can be prevented, and a decrease in the detection accuracy of rotation sensor 30 can be prevented.
- the holding member 24 further includes a spacer 54 that is connected to the base portion 51, extends in the axial direction, and abuts against the first circuit board 21 and the second circuit board 22.
- the fastening member 26 is inserted through the spacer 54.
- the spacer 54 can ensure a gap between the first circuit board 21 and the second circuit board 22. This makes it easier to manufacture the rotating electric machine 100.
- the spacer 54 can be used to fix the board unit 20 to the heat sink 25. This eliminates the need to provide a separate fixing boss or the like for fixing the board unit 20 to the heat sink 25, thereby preventing an increase in the number of components and preventing a reduction in the mounting area for electronic components on the first circuit board 21 and the second circuit board 22.
- the retaining member 24 has a first positioning protrusion 55 connected to the base 51, which penetrates the first circuit board 21 in the axial direction and is inserted into the heat sink 25, and a second positioning protrusion 56 connected to the base 51 and which penetrates the second circuit board 22 in the axial direction.
- the first circuit board 21 and the second circuit board 22 can be positioned with respect to the heat sink 25 by the first positioning protrusions 55 and the second positioning protrusions 56. Therefore, the first circuit board 21 and the second circuit board 22 can be assembled with respect to the heat sink 25 with higher accuracy.
- thermal grease 29 is provided between the heat sink 25 and the electronic components 28.
- the holding member 24 is disposed at a position overlapping with the thermal grease 29 in a plan view, and further has a load transmission portion 57 that abuts against the first circuit board 21 and the second circuit board 22. According to this configuration, the load applied to the second circuit board 22 during the manufacture of the rotating motor 100 is transmitted to the first circuit board 21 via the load transmission part 57, thereby spreading out the heat dissipation grease 29 provided between the heat sink 25 and the electronic component 28.
- the motor 1 also includes a rotor 12 fixed to the rotating shaft 11, a stator 13 arranged on the outer periphery of the rotor 12, an armature winding 15 wound around the stator 13, and wiring terminals 17 electrically connected to the armature winding 15 and connected to the first circuit board 21.
- the first circuit board 21 has motor terminal connection holes 32 to which the wiring terminals 17 are connected.
- the second circuit board 22 has a cutout portion 43 that exposes the motor terminal connection holes 32 when the board unit 20 is viewed from the second circuit board 22 side along the axial direction. According to this configuration, for example, a connection tool for connecting the wiring terminal 17 to the motor terminal connection hole 32 can be brought close to the connection portion between the wiring terminal 17 and the motor terminal connection hole 32 via the notch portion 43. Therefore, the wiring terminal 17 can be easily connected to the motor terminal connection hole 32 via the notch portion 43. This makes it easier to manufacture the rotating electric machine 100.
- the outer shape of the head of the fastening member 26 is substantially the same as the outer shape of the spacer 54 . According to this configuration, the force generated when fastening the fastening member 26 can be reliably received by the spacer 54 while suppressing an increase in the space required for providing the head of the fastening member 26 .
- the control unit 2 further includes a connector assembly 27 having a press-fit terminal 74 connected to the first circuit board 21.
- the first circuit board 21 has a connector terminal connection hole 35 provided at one end of the first circuit board 21 in the first direction D1, to which the press-fit terminal 74 is connected.
- the connector assembly 27 can be easily connected to the first circuit board 21 by using the press-fit terminals 74. Therefore, the manufacturing of the rotating electric machine 100 becomes easier.
- a pressing force is applied to one end of the first circuit board 21 in the first direction D1. Because the one end of the first circuit board 21 is exposed from the second circuit board 22, a receiving jig for supporting the one end can be easily installed on the first circuit board 21. By receiving the pressing force applied to the first circuit board 21 with the receiving jig, distortion of the first circuit board 21 can be suppressed. Furthermore, poor connection of the press-fit terminals 74 due to insufficient insertion of the press-fit terminals 74 into the connector terminal connection holes 35 can be prevented.
- the connector assembly 27 has a connector positioning protrusion 75 that is inserted into the first circuit board 21 .
- the connector assembly 27 is positioned with respect to the first circuit board 21 by the connector positioning projections 75 , so that the press-fit terminals 74 can be connected to the connector terminal connection holes 35 more reliably.
- the tip of the connector positioning projection 75 is located closer to the first circuit board 21 than the tip of the press-fit terminal 74 . According to this configuration, the press-fit terminals 74 can be connected to the connector terminal connection holes 35 in a state in which the connector assembly 27 is positioned with respect to the first circuit board 21 by the connector positioning protrusions 75. Therefore, the press-fit terminals 74 can be connected to the connector terminal connection holes 35 more reliably.
- the board unit 20 further includes an inter-board connector 23 that electrically connects the first circuit board 21 and the second circuit board 22 .
- the first circuit board 21 and the second circuit board 22 can be easily electrically connected by the inter-board connector 23 .
- Embodiment 2 Next, a description will be given of a rotating electric machine 100A according to embodiment 2.
- the rotating electric machine 100A according to this embodiment has the same basic configuration as embodiment 1, so the following description will focus on the differences.
- Fig. 10 is a perspective view of the intermediate structure of the rotating electrical machine 100A as seen from below, and Fig. 11 is a cross-sectional view taken along line AA in Fig. 10.
- This embodiment differs from the first embodiment in that a connector assembly 27A is connected to a first circuit board 21A and a second circuit board 22A.
- the connector assembly 27A has a first press-fit terminal 81 connected to the first circuit board 21A and a second press-fit terminal 82 connected to the second circuit board 22A.
- the first press-fit terminal 81 is disposed in the center of the connector assembly 27A in the second direction D2.
- the second press-fit terminals 82 are disposed on both sides of the first press-fit terminal 81 in the second direction D2.
- the height of the second press-fit terminal 82 is greater than the height of the first press-fit terminal 81.
- the tip of the second press-fit terminal 82 is located closer to the second circuit board 22A than the tip of the first press-fit terminal 81.
- the length of the second circuit board 22A in the first direction D1 is approximately the same as the length of the first circuit board 21A in the first direction D1.
- the second circuit board 22A is arranged to overlap one end of the first circuit board 21 in the first direction D1.
- FIG. 12 is a perspective view from above of the first circuit board 21A.
- the first circuit board 21A is provided with a first connector terminal connection hole 38 (first connector connection portion) to which the first press-fit terminal 81 is connected, instead of the connector terminal connection hole 35.
- the first connector terminal connection hole 38 is provided at one end of the first circuit board 21A in the first direction D1.
- the first connector terminal connection hole 38 is disposed in the center of the first circuit board 21A in the second direction D2.
- the first circuit board 21A is provided with a connector terminal through hole 39 through which the second press-fit terminal 82 is inserted.
- the connector terminal through hole 39 is provided at one end of the first circuit board 21A in the first direction D1.
- the connector terminal through hole 39 is arranged on both sides of the first connector terminal connection hole 38 in the second direction D2.
- the size of the connector terminal through hole 39 is larger than the size of the second press-fit terminal 82. Therefore, when the second press-fit terminal 82 is inserted into the connector terminal through hole 39, contact between the second press-fit terminal 82 and the connector terminal through hole 39 is prevented.
- a cutout portion may be formed in the first circuit board 21A to prevent interference between the first circuit board 21A and the second press-fit terminal 82.
- FIG. 13 is a perspective view from above of the second circuit board 22A.
- the second circuit board 22A is provided with a second connector terminal connection hole 45 (second connector connection portion) to which the second press-fit terminal 82 is connected.
- the second connector terminal connection hole 45 is provided at one end of the second circuit board 22A in the first direction D1.
- the holding member 24A further includes a support portion 58.
- the support portion 58 is frame-shaped with an inner space.
- the support portion 58 is connected to one end of the base portion 51 in the first direction D1.
- the support portion 58 abuts against the first circuit board 21A and the second circuit board 22A.
- the support portion 58 is provided so as to surround the first connector terminal connection hole 38 of the first circuit board 21A.
- the support portion 58 supports the periphery of the first connector terminal connection hole 38 of the first circuit board 21A.
- the inner space of the support portion 58 accommodates the tip of the first press-fit terminal 81 connected to the first connector terminal connection hole 38. This prevents the first press-fit terminal 81 from coming into contact with the holding member 24A.
- the connector assembly 27A is connected to the first circuit board 21A and the second circuit board 22A.
- the other processes board unit assembly process, board unit fixing process, and cover attachment process
- cover attachment process cover attachment process
- the intermediate structure of the rotating electrical machine 100A after the board unit fixing process is turned upside down.
- the connector assembly 27A is placed facing the second surface 21b of the first circuit board 21A.
- the connector positioning protrusion 75 is inserted into the connector positioning through hole 37 of the first circuit board 21A.
- the second press-fit terminal 82 is inserted into the connector terminal through hole 39 of the first circuit board 21A.
- the receiving jig 200 is placed on the fourth surface 22b of the second circuit board 22A.
- a load is applied to the connector assembly 27A toward the first circuit board 21A.
- the first press-fit terminal 81 is pressed into the first connector terminal connection hole 38 of the first circuit board 21A
- the second press-fit terminal 82 is pressed into the second connector terminal connection hole 45 of the second circuit board 22A.
- the support portion 58 is provided between the first circuit board 21A and the second circuit board 22A so as to surround the first connector terminal connection hole 38. Therefore, the periphery of the first connector terminal connection hole 38 in the first circuit board 21A is supported by the support portion 58. Also, a receiving jig 200 is provided on the fourth surface 22b of the second circuit board 22A.
- the pressing force applied to the first circuit board 21A can be received by the receiving jig 200 via the support portion 58.
- the pressing force applied to the second circuit board 22A can be received by the receiving jig 200. Therefore, distortion of the first circuit board 21A can be suppressed, and a connection failure of the first press-fit terminal 81 caused by an insufficient insertion amount of the first press-fit terminal 81 into the first connector terminal connection hole 38 can be prevented.
- distortion of the second circuit board 22A can be suppressed, and a connection failure of the second press-fit terminal 82 caused by an insufficient insertion amount of the second press-fit terminal 82 into the second connector terminal connection hole 45 can be prevented.
- the connector assembly 27A is screwed to the heat sink 25 using the second fastening members 77.
- the connector assembly 27A further includes the second press-fit terminal 82 connected to the second circuit board 22A.
- the second circuit board 22A is provided at one end of the second circuit board 22A in the first direction D1 and includes the second connector terminal connection hole 45 to which the second press-fit terminal 82 is connected.
- the holding member 24A further includes a support portion 58 that is provided to surround the first connector terminal connection hole 38 when viewed in the axial direction and that abuts against the first circuit board 21A and the second circuit board 22A. According to this configuration, signals and the like from an external sensor can be directly input from connector assembly 27A to second circuit board 22A.
- the support portion 58 supports the periphery of the first connector terminal connection hole 38 in the first circuit board 21A.
- the pressing force can be received using the support portion 58, distortion of the first circuit board 21A and the second circuit board 22A can be suppressed.
- poor connection of the first press-fit terminal 81 caused by an insufficient insertion amount of the first press-fit terminal 81 into the first connector terminal connection hole 38 and poor connection of the second press-fit terminal 82 caused by an insufficient insertion amount of the second press-fit terminal 82 into the second connector terminal connection hole 45 can be prevented.
- FIG. 15 is a perspective view of a holding member 24A according to a modification of the second embodiment, seen from below.
- the holding member 24A further has a guide portion 84.
- the guide portion 84 has a guide through hole 84a penetrating the guide portion 84 in the axial direction.
- the multiple guide through holes 84a are arranged at positions overlapping the multiple second connector terminal connection holes 45 in a plan view.
- a lower end portion (end portion on one side) of the guide through hole 84a is formed in a tapered shape that gradually increases in diameter as it extends downward (to one side).
- the second press-fit terminal 82 is inserted into the guide through hole 84a from below (one side).
- the second press-fit terminal 82 can be smoothly inserted into the guide through hole 84a.
- the second press-fit terminal 82 is guided by the guide through hole 84a toward the second connector terminal connection hole 45 and is press-fitted into the second connector terminal connection hole 45.
- the size of the guide through hole 84a is larger than the size of the second press-fit terminal 82. Therefore, when the second press-fit terminal 82 is inserted into the guide through hole 84a, contact between the second press-fit terminal 82 and the guide through hole 84a is prevented.
- the holding member 24A has a guide portion 84 having a guide through hole 84a through which the second press-fit terminal 82 is inserted from one side.
- One end of the guide through hole 84a is formed in a tapered shape.
- the second press-fit terminal 82 is guided toward the second connector terminal connection hole 45 by the guide portion 84, so that the position of the second press-fit terminal 82 and the position of the second connector terminal connection hole 45 can be prevented from being misaligned. This allows the second press-fit terminal 82 to be reliably inserted into the second connector terminal connection hole 45.
- Embodiment 3 Next, a description will be given of a rotating electric machine 100B according to embodiment 3.
- the rotating electric machine 100B according to this embodiment has the same basic configuration as embodiment 1, so the following description will focus on the differences.
- Embodiment 3 differs from embodiment 1 in that the control unit 2 further includes a third circuit board 91, a second holding member 92, and a second board-to-board connector 93.
- the board unit 20A is composed of a first circuit board 21, a second circuit board 22, a board-to-board connector 23, a holding member 24, the third circuit board 91, the second holding member 92, and the second board-to-board connector 93.
- the third circuit board 91 is disposed above the second circuit board 22.
- the second board-to-board connector 93 is disposed between the second circuit board 22 and the third circuit board 91 in the axial direction.
- the second board-to-board connector 93 electrically connects the second circuit board 22 and the third circuit board 91.
- the second positioning protrusion 56 of the holding member 24 axially penetrates the second circuit board 22 and the third circuit board 91.
- the second positioning protrusion 56 positions the second circuit board 22 and the third circuit board 91 relative to the holding member 24.
- the second holding member 92 is disposed between the second circuit board 22 and the third circuit board 91 in the axial direction.
- the second holding member 92 holds the second circuit board 22 and the third circuit board 91.
- the second holding member 92 has a third locking portion (not shown) that locks the second circuit board 22 from the third surface 22a of the second circuit board 22, and a fourth locking portion (not shown) that locks the third circuit board 91 from the top surface of the third circuit board 91.
- the second holding member 92 has a second spacer 92a and a second load transmitting portion 92b.
- the second spacer 92a has a cylindrical shape extending in the axial direction.
- the second spacers 92a are arranged at positions overlapping the spacers 54 in a plan view.
- One axial end of the second spacers 92a abuts against the second circuit board 22, and the other axial end of the second spacers 92a abuts against the third circuit board 91.
- the second spacers 92a ensure a gap between the second circuit board 22 and the third circuit board 91.
- the second spacer 92a has a fourth fastening through hole that passes through the second spacer 92a in the axial direction.
- the fastening member 26 is inserted into the fourth fastening through hole.
- the second load transmission portion 92b is disposed at a position overlapping with the thermal grease 29 in a plan view.
- the second load transmission portion 92b abuts against the second circuit board 22 and the third circuit board 91.
- a load applied to the third circuit board 91 during the manufacture of the rotating electric machine 100 is transmitted to the first circuit board 21 via the second load transmission portion 92b, the second circuit board 22, and the load transmission portion 57.
- the first circuit board 21 is pressed toward the heat sink 25, and the thermal grease 29 applied between the heat sink 25 and the electronic components 28 mounted on the first circuit board 21 is spread.
- board unit 20A is assembled by holding first circuit board 21, second circuit board 22, and third circuit board 91 with holding member 24 and second holding member 92.
- second positioning protrusion 56 positions second circuit board 22 and third circuit board 91 with respect to holding member 24, so that board unit 20A can be assembled with the same accuracy as in the first embodiment.
- the other steps are the same as those in the first embodiment, so they will not be described here.
- the board unit 20A further has a third circuit board 91 and a second holding member 92 that is arranged between the second circuit board 22 and the third circuit board 91 and holds the second circuit board 22 and the third circuit board 91.
- the same effect as that of the first embodiment can be obtained. That is, the first circuit board 21, the second circuit board 22, and the third circuit board 91 are held by the holding member 24 and the second holding member 92, and the board unit 20A is assembled.
- the board unit 20A is fixed to the heat sink 25 by the fastening member 26, and the first circuit board 21, the second circuit board 22, and the third circuit board 91 can be assembled to the heat sink 25 at once and with high accuracy. Since it is not necessary to assemble the circuit boards 21, 22, and 91 one by one, the manufacturing of the rotating electric machine 100B is facilitated. In addition, the manufacturing line of the rotating electric machine 100B can be shared with the manufacturing line of the rotating electric machine in which the control unit is composed of one circuit board, and therefore the manufacturing cost can be reduced. The same effect can be obtained even when the control unit 2 has four or more circuit boards.
- the heat sink 25 may be formed integrally with the motor case 14 of the rotating electrical machine 100 .
- the fastening members 26 are not limited to screws as long as they can fasten the board unit 20 to the heat sink 25 .
- the number and arrangement of the fastening member 26, the first locking portion 52, the second locking portion 53, the spacer 54, the first positioning protrusion 55, and the second positioning protrusion 56 of the retaining member 24, and the press-fit terminal 74 of the connector assembly 27, etc. may be changed as appropriate depending on the specifications of the rotating motor 100.
Landscapes
- Engineering & Computer Science (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Power Engineering (AREA)
Abstract
回転電機は、回転シャフトを有するモータと、モータを制御する制御ユニットと、を備え、制御ユニットは、第1回路基板および第2回路基板と、第1回路基板と第2回路基板との間に配置され、第1回路基板および第2回路基板を保持する保持部材と、を有する基板ユニットと、モータと基板ユニットとの間に、回転シャフトの軸方向において第1回路基板と対向するよう配置されるヒートシンクと、基板ユニットをヒートシンクに固定する締結部材と、を備え、保持部材は、基部と、基部に接続され、第1回路基板を、第1回路基板のうち基部と対向する第1面とは反対側の第2面から係止する第1係止部と、基部に接続され、第2回路基板を、第2回路基板のうち基部と対向する第3面とは反対側の第4面から係止する第2係止部と、を有しており、締結部材は、基板ユニットを軸方向に貫通し、ヒートシンクに締結されている。
Description
本開示は、回転電機およびその製造方法に関する。
特許文献1に開示される回転電機は、回転シャフトを有するモータと、モータを制御する制御ユニットとを有する。制御ユニットは、回転シャフトの軸方向に並んで配置される第1回路基板および第2回路基板と、第1回路基板と第2回路基板との間に設けられるスペーサと、第1、第2回路基板に接続されるコネクタアセンブリと、を備える。回転電機の製造時には、軸方向において、コネクタアセンブリ、第2回路基板、スペーサ、および第1回路基板をこの順に配置し、共用固定部材を、コネクタアセンブリ、第2回路基板、スペーサ、および第1回路基板に挿通させる。共用固定部材の端部をヒートシンクに固定することで、コネクタアセンブリ、第2回路基板、スペーサ、および第1回路基板をヒートシンクに固定する。
特許文献1の構造では、共用固定部材で固定されるまでは第1回路基板および第2回路基板を固定することができないため、第1回路基板および第2回路基板をヒートシンクに対して精度良く組み付けることが困難である。組み立て精度を向上させるため、共用固定部材で固定される前に第1回路基板および第2回路基板を一枚ずつヒートシンクに対して仮固定した場合、回転電機の製造が複雑になり、製造コストが増加する。
本開示は、上記のような課題を解決するためになされたもので、第1回路基板および第2回路基板を精度よく組み付けることができるとともに、容易かつ低コストでの製造を可能とする回転電機およびその製造方法を提供することを目的とする。
本開示に係る回転電機は、回転シャフトを有するモータと、前記モータを制御する制御ユニットと、を備え、前記制御ユニットは、第1回路基板および第2回路基板と、前記第1回路基板と前記第2回路基板との間に配置され、前記第1回路基板および前記第2回路基板を保持する保持部材と、を有する基板ユニットと、前記モータと前記基板ユニットとの間に、前記回転シャフトの軸方向において前記第1回路基板と対向するよう配置されるヒートシンクと、前記基板ユニットを前記ヒートシンクに固定する締結部材と、を備え、前記保持部材は、基部と、前記基部に接続され、前記第1回路基板を、前記第1回路基板のうち前記基部と対向する第1面とは反対側の第2面から係止する第1係止部と、前記基部に接続され、前記第2回路基板を、前記第2回路基板のうち前記基部と対向する第3面とは反対側の第4面から係止する第2係止部と、を有しており、前記締結部材は、前記基板ユニットを前記軸方向に貫通し、前記ヒートシンクに締結されている。
本開示に係る回転電機の製造方法は、保持部材により第1回路基板および第2回路基板を保持して基板ユニットを組み立てる基板ユニット組立工程と、前記基板ユニットに対し、モータの回転シャフトの軸方向において締結部材を貫通させ、前記締結部材をヒートシンクに締結することで、前記基板ユニットを前記ヒートシンクに固定する基板ユニット固定工程と、を備える。
本開示によれば、第1回路基板および第2回路基板を精度よく組み付けることができるとともに、容易かつ低コストでの製造を可能とする回転電機およびその製造方法を提供できる。
以下、図面を参照しながら、本開示の実施の形態について説明する。なお、本開示の範囲は、以下の実施の形態に限定されず、本開示の技術的思想の範囲内で任意に変更可能である。
実施の形態1.
図1は、実施の形態1に係る回転電機100の分解斜視図である。図2は、回転電機100の概略断面図である。回転電機100は、多相巻線型のモータ1と、モータ1を制御する制御ユニット2と、を備える。制御ユニット2は、第1回路基板21と、第2回路基板22と、基板間コネクタ23と、保持部材24と、ヒートシンク25と、締結部材26と、コネクタアセンブリ27と、を有している。
図1は、実施の形態1に係る回転電機100の分解斜視図である。図2は、回転電機100の概略断面図である。回転電機100は、多相巻線型のモータ1と、モータ1を制御する制御ユニット2と、を備える。制御ユニット2は、第1回路基板21と、第2回路基板22と、基板間コネクタ23と、保持部材24と、ヒートシンク25と、締結部材26と、コネクタアセンブリ27と、を有している。
図2に示されるように、モータ1は、回転シャフト11と、ロータ12と、ステータ13と、モータケース14と、電機子巻線15と、環状配線部16と、配線端子17と、第1、第2の軸受18a、18bと、から主に構成されている。
以下の説明では、モータ1における回転シャフト11の中心軸線Oが延びる方向を軸方向という場合がある。モータ1と制御ユニット2とは、軸方向に並んでいる。軸方向において、制御ユニット2が位置する側を上方といい、モータ1が位置する側を下方という場合がある。軸方向から見ることを平面視という場合がある。平面視において、中心軸線Oに交差する方向を径方向といい、中心軸線O回りに周回する方向を周方向という場合がある。
回転シャフト11、ロータ12、およびステータ13は、同軸上に配置されている。
回転シャフト11は、上方に位置する入力端11aと、下方に位置する出力端11bと、を有する。出力端11bには、駆動対象(例えば、車両の操舵系)が接続される。
ロータ12は、回転シャフト11に固定される。ロータ12の外周面には、複数対の永久磁石(不図示)が配置されている。これらの永久磁石は、界磁極を構成する。
ステータ13は、ロータ12の外周を囲むように設けられる。ロータ12の外周面とステータ13の内周面との間には、エアギャップが形成されている。エアギャップは、周方向における全周にわたって形成されている。
回転シャフト11は、上方に位置する入力端11aと、下方に位置する出力端11bと、を有する。出力端11bには、駆動対象(例えば、車両の操舵系)が接続される。
ロータ12は、回転シャフト11に固定される。ロータ12の外周面には、複数対の永久磁石(不図示)が配置されている。これらの永久磁石は、界磁極を構成する。
ステータ13は、ロータ12の外周を囲むように設けられる。ロータ12の外周面とステータ13の内周面との間には、エアギャップが形成されている。エアギャップは、周方向における全周にわたって形成されている。
モータケース14は、回転シャフト11、ロータ12、およびステータ13を収容する。モータケース14は、円筒部14aと、底部14bとを有する。円筒部14aは、ステータ13を外周側から覆う。ステータ13は、円筒部14aの内面に、焼嵌め、または圧入により固定される。底部14bは、円筒部14aの下端を覆う。底部14bの平面視における中央には、回転シャフト11が挿通される出力側シャフト貫通孔14cが形成されている。円筒部14aの上端は、制御ユニット2のヒートシンク25により覆われる。
電機子巻線15は、ステータ13に巻装される。電機子巻線15は、U相巻線と、V相巻線と、W相巻線とを備える。
環状配線部16は、ステータ13の上方に配置される。環状配線部16は、電機子巻線15に近接して配置されている。環状配線部16は、電機子巻線15の端部にTIG溶接等で接続されている。
配線端子17は、環状配線部16から、ヒートシンク25を貫通して上方に延びる。配線端子17は、環状配線部16を介して電機子巻線15の端部に電気的に接続されている。より詳細には、配線端子17は3本の導体で構成されており、これら3本の導体はそれぞれ、電機子巻線15のU相巻線の端部、V相巻線の端部、およびW相巻線の端部と電気的に接続されている。配線端子17の上端部は、制御ユニット2の第1回路基板21に接続される。
環状配線部16は、ステータ13の上方に配置される。環状配線部16は、電機子巻線15に近接して配置されている。環状配線部16は、電機子巻線15の端部にTIG溶接等で接続されている。
配線端子17は、環状配線部16から、ヒートシンク25を貫通して上方に延びる。配線端子17は、環状配線部16を介して電機子巻線15の端部に電気的に接続されている。より詳細には、配線端子17は3本の導体で構成されており、これら3本の導体はそれぞれ、電機子巻線15のU相巻線の端部、V相巻線の端部、およびW相巻線の端部と電気的に接続されている。配線端子17の上端部は、制御ユニット2の第1回路基板21に接続される。
回転シャフト11の入力端11aは、ヒートシンク25に形成される第1シャフト貫通孔61に挿通される。回転シャフト11の出力端11bは、底部14bに形成される出力側シャフト貫通孔14cに挿通される。第1シャフト貫通孔61には、第1の軸受18aが設けられる。出力側シャフト貫通孔14cには、第2の軸受18bが設けられる。第1の軸受18aおよび第2の軸受18bは、回転シャフト11を回転自在に支持する。
回転シャフト11の入力端11aには、センサマグネット19が取り付けられている。センサマグネット19は、入力端11aにおける軸方向を向く端面に、圧入により固定されている。センサマグネット19は、1対または複数対の永久磁石を備えている。センサマグネット19は、回転シャフト11とともに回転する。したがって、センサマグネット19が発生させる磁界は、回転シャフト11の回転に伴って変化する。
制御ユニット2は、モータ1を制御する。軸方向において、第2回路基板22、保持部材24、第1回路基板21、およびヒートシンク25は、上方からこの順に配置されている。第1回路基板21と、第2回路基板22と、基板間コネクタ23と、保持部材24とにより、基板ユニット20が構成される。
制御ユニット2は、上方からカバー70により覆われる。カバー70は、ヒートシンク25に取り付けられている。基板ユニット20(第1回路基板21、第2回路基板22、基板間コネクタ23、および保持部材24)は、カバー70およびヒートシンク25により囲まれる空間に収容される。
第1回路基板21は、軸方向において保持部材24とヒートシンク25との間に配置される。第1回路基板21は、第1面21aと、第2面21bとを有している。第1面21aは、第1回路基板21の上側の面であり、第2面21bは、第1回路基板21の下側の面である。
第1回路基板21には、モータ1を駆動するインバータ回路が実装されている。インバータ回路は、スイッチング素子、シャント抵抗、および平滑コンデンサ等の電子部品により構成されている。これら電子部品のうち、モータ1の駆動に伴い発熱する発熱素子である電子部品28は、第1回路基板21の第2面21bに配置されることが好ましい。電子部品28は、放熱グリス29を介してヒートシンク25の上面に接している。電子部品28から生じた熱は、放熱グリス29を介してヒートシンク25に放熱される。なお、電子部品28は、第1回路基板21の第1面21aに配置されていてもよい。
図3は、第1回路基板21の上方からの斜視図である。以下の説明では、図3に示されるように、第1回路基板21の第1面21aに沿った平面における一方向を第1方向D1といい、上記平面における第1方向D1に直交する方向を第2方向D2という。第1方向D1および第2方向D2は、軸方向に直交する。
第1回路基板21には、第2シャフト貫通孔31、モータ端子接続孔32(モータ接続部)、第1締結貫通孔33、第1位置決め貫通孔34、コネクタ端子接続孔35(第1コネクタ接続部)、およびコネクタ位置決め貫通孔37が設けられている。
第2シャフト貫通孔31は、第1回路基板21を軸方向に貫通する。第2シャフト貫通孔31は、平面視において出力側シャフト貫通孔14cと重なる位置に配置される。第2シャフト貫通孔31には、回転シャフト11の入力端11aが挿通される。
モータ端子接続孔32は、第1回路基板21を軸方向に貫通する。モータ端子接続孔32は、第1回路基板21における第2方向D2の端部に設けられる。3つのモータ端子接続孔32が、第1方向D1に並んで配置されている。3つのモータ端子接続孔32は、配線端子17の3本の導体にそれぞれ接続される。
第1締結貫通孔33は、第1回路基板21を軸方向に貫通する。第1締結貫通孔33は、第1回路基板21の外縁部に設けられる。本実施の形態では、複数の第1締結貫通孔33が、第1回路基板21における第1方向D1の両端部および第2方向D2の両端部に設けられている。第1締結貫通孔33には、締結部材26が挿通される。
第1位置決め貫通孔34は、第1回路基板21を軸方向に貫通する。第1位置決め貫通孔34は、第1回路基板21の外縁部に設けられる。本実施の形態では、一対の第1位置決め貫通孔34が、第1回路基板21における第2方向D2の両端部に設けられている。第1位置決め貫通孔34には、後述する保持部材24の第1位置決め突起55が挿通される。
コネクタ端子接続孔35は、第1回路基板21を軸方向に貫通する。コネクタ端子接続孔35は、第1回路基板21における第1方向D1の一端部に設けられる。本実施の形態では、複数のコネクタ端子接続孔35が、第2方向D2に並んで配置される。コネクタ端子接続孔35には、後述するコネクタアセンブリ27のプレスフィット端子74が接続される。
コネクタ位置決め貫通孔37は、第1回路基板21を軸方向に貫通する。コネクタ位置決め貫通孔37は、第1回路基板21における第1方向D1の一端部に設けられる。本実施の形態では、一対のコネクタ位置決め貫通孔37が、第1方向D1から見たときに第2方向D2において複数のコネクタ端子接続孔35の両側に配置されるよう、設けられる。コネクタ位置決め貫通孔37には、後述するコネクタアセンブリ27のコネクタ位置決め突起75が挿通される。
図2に戻り、第2回路基板22は、第1回路基板21の上方に配置される。第2回路基板22は、第3面22aと、第4面22bとを有している。第3面22aは、第2回路基板22の下側の面であり、第4面22bは、第2回路基板22の上側の面である。
第2回路基板22には、モータ1の駆動を制御する制御回路が実装されている。制御回路は、モータ1の駆動制御を演算するマイクロコントローラ、スイッチング素子を制御するために用いられる駆動回路等により構成されている。
第2回路基板22の第3面22aには、回転センサ30が実装される。回転センサ30は、磁気抵抗センサ(MRセンサ)またはホールセンサ等の磁気センサである。回転センサ30は、回転シャフト11に取り付けられるセンサマグネット19と同軸上に配置されている。センサマグネット19と回転センサ30とは、ギャップを介して対向する。回転センサ30は、回転シャフト11とともに回転するセンサマグネット19の永久磁石からの磁界の変化を検出して電気信号に変換する。センサマグネット19および回転センサ30により、回転シャフト11の回転角が検出される。なお、回転センサ30として、レゾルバ、光学センサ等を用いてもよい。
図4は、第2回路基板22の上方からの斜視図である。図4に示されるように、第2回路基板22には、第2締結貫通孔41、第2位置決め貫通孔42、および切欠き部43が設けられている。
第2締結貫通孔41は、第2回路基板22を軸方向に貫通する。第2締結貫通孔41は、第2回路基板22の外縁部に設けられる。本実施の形態では、複数の第2締結貫通孔41が、平面視において複数の第1締結貫通孔33と重なる位置に配置される。第2締結貫通孔41には、締結部材26が挿通される。
第2位置決め貫通孔42は、第2回路基板22を軸方向に貫通する。第2位置決め貫通孔42は、第2回路基板22の外縁部に設けられる。本実施の形態では、一対の第2位置決め貫通孔42が、平面視において一対の第1位置決め貫通孔34と重なる位置に配置される。なお、第1位置決め貫通孔34と第2位置決め貫通孔42とは、平面視において異なる位置に配置されていてもよい。第2位置決め貫通孔42には、後述する保持部材24の第2位置決め突起56が挿通される。
切欠き部43は、第2回路基板22における第2方向D2の端縁から内側に窪むよう設けられる。本実施の形態では、一対の切欠き部43が、第2回路基板22における第2方向D2の両端部に設けられている。切欠き部43は、平面視においてモータ端子接続孔32と重なる位置に形成される。基板ユニット20を軸方向に沿って第2回路基板22側から見たときに、切欠き部43は、モータ端子接続孔32を露出させる。
第2回路基板22の第1方向D1における長さは、第1回路基板21の第1方向D1における長さよりも短い。基板ユニット20を軸方向に沿って第2回路基板22側から見たときに、第1回路基板21の第1方向D1における一端部(コネクタ端子接続孔35)は、第2回路基板22から露出する。
図2に戻り、基板間コネクタ23は、軸方向において第1回路基板21と第2回路基板22との間に配置される。基板間コネクタ23は、第1回路基板21のインバータ回路と第2回路基板22の制御回路とを電気的に接続する。基板間コネクタ23は、第1回路基板21に実装されるオスコネクタと、第2回路基板22に実装されるメスコネクタとにより構成されている。オスコネクタとメスコネクタとを互いに嵌合することで、基板間コネクタ23を介して第1回路基板21と第2回路基板22とが電気的に接続される。なお、基板間コネクタ23として、折り曲げ基板を用いてもよいし、端子の先端がプレスフィット形状であるコネクタを用いてもよい。
保持部材24は、軸方向において第1回路基板21と第2回路基板22との間に配置される。基板間コネクタ23により第1回路基板21と第2回路基板22とを電気的に接続した状態で、保持部材24により第1回路基板21および第2回路基板22を保持することで、基板ユニット20が組み立てられる。
図5は、保持部材24の上方からの斜視図である。図6は、基板ユニット20の下方からの斜視図である。
図5に示されるように、保持部材24は、基部51と、第1係止部52と、第2係止部53と、スペーサ54と、第1位置決め突起55と、第2位置決め突起56と、荷重伝達部57と、を有している。
図5に示されるように、保持部材24は、基部51と、第1係止部52と、第2係止部53と、スペーサ54と、第1位置決め突起55と、第2位置決め突起56と、荷重伝達部57と、を有している。
基部51は、内側空間を有する枠状である。基部51には、保持部材24の各部材52~57が接続される。基部51の内側空間には、回転センサ30を含む、第1回路基板21および第2回路基板22に実装される電子部品が収容される。これにより、基部51の内側空間を電子部品の収容に用いることができ、基板ユニット20の小型化を図ることができる。
第1係止部52は、第1回路基板21を、第1回路基板21の第2面21b(すなわち、第1回路基板21のうち基部51と対向する第1面21aとは反対側の面)から係止する。図6に示されるように、複数の第1係止部52が、第1回路基板21を囲むよう設けられる。第1係止部52は、基部51から下方(すなわち、第1回路基板21側)に延びる第1突出部52aと、第1突出部52aの先端に位置する第1係止爪52bと、を有する。第1係止爪52bは、上側を向く第1係止面を有する。第1係止爪52bの第1係止面が第1回路基板21の第2面21bに当接することで、第1回路基板21が保持部材24に軸方向において固定される。
第2係止部53は、第2回路基板22を、第2回路基板22の第4面22b(すなわち、第2回路基板22のうち基部51と対向する第3面22aとは反対側の面)から係止する。図6に示されるように、複数の第2係止部53が、第2回路基板22を囲むよう設けられる。第2係止部53は、基部51から上方(すなわち、第2回路基板22側)に延びる第2突出部53aと、第2突出部53aの先端に位置する第2係止爪53bと、を有する。第2係止爪53bは、下側を向く第2係止面を有する。第2係止爪53bの第2係止面が第2回路基板22の第4面22bに当接することで、第2回路基板22が保持部材24に軸方向において固定される。
スペーサ54は、軸方向に延びる円筒状である。本実施の形態では、複数のスペーサ54が、平面視において複数の第1締結貫通孔33と重なる位置に配置される。スペーサ54における軸方向の一端は第1回路基板21と当接し、スペーサ54における軸方向の他端は第2回路基板22と当接する。スペーサ54により、第1回路基板21と第2回路基板22との間の間隔が確保される。スペーサ54は、スペーサ54を軸方向に貫通する第3締結貫通孔54aを有する。第3締結貫通孔54aには、締結部材26が挿通される。
基板ユニット20が組み立てられたとき、第2回路基板22の第2締結貫通孔41と、保持部材24の第3締結貫通孔54aと、第1回路基板21の第1締結貫通孔33とは、上方からこの順に同軸上に配置される。第2締結貫通孔41、第3締結貫通孔54a、および第1締結貫通孔33は、互いに連通している。以下、これら第2締結貫通孔41、第3締結貫通孔54a、および第1締結貫通孔33をまとめて、基板ユニット20の締結貫通孔とも称する。
基板ユニット20が組み立てられたとき、第2回路基板22の第2締結貫通孔41と、保持部材24の第3締結貫通孔54aと、第1回路基板21の第1締結貫通孔33とは、上方からこの順に同軸上に配置される。第2締結貫通孔41、第3締結貫通孔54a、および第1締結貫通孔33は、互いに連通している。以下、これら第2締結貫通孔41、第3締結貫通孔54a、および第1締結貫通孔33をまとめて、基板ユニット20の締結貫通孔とも称する。
第1位置決め突起55は、軸方向に延びる円柱状である。本実施の形態では、一対の第1位置決め突起55が、一対の第1位置決め貫通孔34に対応して設けられる。第1位置決め突起55は、基部51から下方に延びる。第1位置決め突起55は、第1位置決め貫通孔34に挿通される。第1位置決め突起55により、第1回路基板21が保持部材24に対して位置決めされる。第1位置決め突起55の高さは、第1係止部52の高さよりも高い。すなわち、第1位置決め突起55の先端は、第1係止部52の先端よりも下方に位置する。
また、第1位置決め突起55は、後述するヒートシンク25の嵌合穴64に嵌入される。これにより、基板ユニット20がヒートシンク25に対して位置決めされる。
また、第1位置決め突起55は、後述するヒートシンク25の嵌合穴64に嵌入される。これにより、基板ユニット20がヒートシンク25に対して位置決めされる。
第2位置決め突起56は、軸方向に延びる円柱状である。本実施の形態では、一対の第2位置決め突起56が、一対の第2位置決め貫通孔42に対応して設けられる。第2位置決め突起56は、基部51から上方に延びる。第2位置決め突起56は、第2位置決め貫通孔42に挿通される。第2位置決め突起56により、第2回路基板22が保持部材24に対して位置決めされる。第2位置決め突起56の高さは、第2係止部53の高さよりも高い。すなわち、第2位置決め突起56の先端は、第2係止部53の先端よりも上方に位置する。
本実施の形態では、第1位置決め突起55と第2位置決め突起56とは、平面視において重なる位置に配置される。しかしながら、第1位置決め突起55と第2位置決め突起56とは、平面視において異なる位置に配置されていてもよい。
本実施の形態では、第1位置決め突起55と第2位置決め突起56とは、平面視において重なる位置に配置される。しかしながら、第1位置決め突起55と第2位置決め突起56とは、平面視において異なる位置に配置されていてもよい。
荷重伝達部57は、平面視において放熱グリス29と重なる位置に配置される。荷重伝達部57は、第1回路基板21と当接する第1当接部57aと、第2回路基板22と当接する第2当接部57bと、第1当接部57aと第2当接部57bとを接続する接続部57cと、を有する。第1当接部57aは、基部51の下面に設けられる突起である。第2当接部57bは、基部51の上面に設けられる突起である。接続部57cは、基部51の一部である。回転電機100の製造時に第2回路基板22に印加される荷重は、荷重伝達部57を介して第1回路基板21に伝達される。
図2に戻り、ヒートシンク25は、軸方向においてステータ13と基板ユニット20(第1回路基板21)との間に配置される。ヒートシンク25は、モータケース14の円筒部14a内に嵌合される。ヒートシンク25は、ステータ13を上方から覆っている。ヒートシンク25により、モータ1のロータ12およびステータ13が収容される空間と、制御ユニット2の基板ユニット20が収容される空間とが仕切られる。
図7は、ヒートシンク25の上方からの斜視図である。図7に示されるように、ヒートシンク25には、第1シャフト貫通孔61、モータ端子貫通孔62、締結穴63、および嵌合穴64が設けられている。
第1シャフト貫通孔61は、ヒートシンク25を軸方向に貫通する。第1シャフト貫通孔61は、平面視において出力側シャフト貫通孔14cと重なる位置に配置される。第1シャフト貫通孔61には、回転シャフト11の入力端11aが挿通される。
モータ端子貫通孔62は、ヒートシンク25を軸方向に貫通する。モータ端子貫通孔62は、ヒートシンク25における第2方向D2の端部に設けられる。3つのモータ端子貫通孔62が、第1方向D1に並んで配置されている。3つのモータ端子貫通孔62は、平面視において3つのモータ端子接続孔32と重なる位置に配置される。3つのモータ端子貫通孔62には、配線端子17の3本の導体がそれぞれ挿通される。平面視において、モータ端子貫通孔62の大きさは、配線端子17の大きさよりも大きい。したがって、配線端子17がモータ端子貫通孔62に挿通されたときに、配線端子17とモータ端子貫通孔62とが接触することが防止される。
締結穴63は、ヒートシンク25の外縁部に設けられる。締結穴63は、ヒートシンク25の上面から下方に窪む。本実施の形態では、複数の締結穴63が、平面視において複数の第1締結貫通孔33と重なる位置に配置される。締結穴63には、締結部材26が締結される。
嵌合穴64は、ヒートシンク25の外縁部に設けられる。嵌合穴64は、ヒートシンク25の上面から下方に窪む。本実施の形態では、一対の嵌合穴64が、平面視において一対の第1位置決め貫通孔34と重なる位置に配置される。嵌合穴64には、第1位置決め突起55が嵌入される。
締結部材26は、基板ユニット20をヒートシンク25に固定するために用いられる。本実施の形態では、複数の締結部材26が、基板ユニット20の複数の締結貫通孔に対応して設けられる。締結部材26は、第2回路基板22側から、基板ユニット20の締結貫通孔に挿通され、ヒートシンク25の締結穴63に締結される。すなわち、締結部材26は、基板ユニット20を軸方向に貫通し、ヒートシンク25に締結される。
締結部材26は、例えばネジである。締結部材26は、第2回路基板22に当接する頭部と、頭部から軸方向に延びる軸部と、を有する。締結部材26の軸部が、基板ユニット20の締結貫通孔に挿通され、ヒートシンク25の締結穴63に締結される。平面視において、締結部材26の頭部の外形は、スペーサ54の外形と略同一である。
また、締結部材26の材質は、スペーサ54の材質と同一であることが好ましい。この場合、温度変化により、第1回路基板21および第2回路基板22に対する締結部材26の締結力が変化することを抑えることができる。
また、締結部材26の材質は、スペーサ54の材質と同一であることが好ましい。この場合、温度変化により、第1回路基板21および第2回路基板22に対する締結部材26の締結力が変化することを抑えることができる。
コネクタアセンブリ27は、回転電機100を、外部の電源およびセンサ等と電気的に接続する。コネクタアセンブリ27は、ヒートシンク25の下面に設けられている。コネクタアセンブリ27は、ヒートシンク25を介して第1回路基板21と対向する。コネクタアセンブリ27は、第1回路基板21に接続される。なお、本実施の形態では、コネクタアセンブリ27は第1回路基板21の下方に設けられているが、コネクタアセンブリ27は、第1回路基板21の上方に設けられていてもよい。
図8は、コネクタアセンブリ27の斜視図である。図8に示されるように、コネクタアセンブリ27は、電源端子71と、信号端子72と、コネクタ保持部73と、コネクタ位置決め突起75と、を有する。
電源端子71は、外部電源と接続される。信号端子72は、外部のセンサ等と接続される。外部電源からの電力は、電源端子71を介して第1回路基板21に供給される。外部のセンサ等からの各種信号は、信号端子72を介して第1回路基板21に供給される。電源端子71および信号端子72は、コネクタ保持部73により保持される。
電源端子71および信号端子72における、第1回路基板21側の端部は、プレスフィット端子74(第1プレスフィット端子)となっている。プレスフィット端子74は、コネクタ保持部73から第1回路基板21側に延びている。複数のプレスフィット端子74は、複数のコネクタ端子接続孔35にそれぞれ圧入される。プレスフィット端子74がコネクタ端子接続孔35の内面に形成される導電層と接触することで、プレスフィット端子74とコネクタ端子接続孔35とが電気的に接続される。
コネクタ位置決め突起75は、円柱状に形成されている。本実施の形態では、一対のコネクタ位置決め突起75が、一対のコネクタ位置決め貫通孔37に対応して設けられる。コネクタ位置決め突起75は、コネクタ保持部73から第1回路基板21側に延びている。コネクタ位置決め突起75は、コネクタ位置決め貫通孔37に挿通される。コネクタ位置決め突起75により、コネクタアセンブリ27が第1回路基板21に対して位置決めされる。コネクタ位置決め突起75の高さは、プレスフィット端子74の高さよりも高い。すなわち、コネクタ位置決め突起75の先端は、プレスフィット端子74の先端よりも第1回路基板21側に位置する。
次に、回転電機100の製造方法について説明する。本実施の形態に係る回転電機100の製造方法は、基板ユニット組立工程と、基板ユニット固定工程と、コネクタ取付工程と、カバー取付工程と、を備える。
基板ユニット組立工程では、保持部材24により第1回路基板21および第2回路基板22を保持して基板ユニット20を組み立てる。
具体的には、図9Aに示されるように、第1位置決め突起55を、第1位置決め貫通孔34に挿通し、第1係止部52により、第1回路基板21を、第1回路基板21の第2面21bから係止する。これにより、第1回路基板21が保持部材24に固定される。第1位置決め突起55の高さは、第1係止部52の高さよりも高い。したがって、第1位置決め突起55により第1回路基板21が保持部材24に対して位置決めされた状態で、第1係止部52により第1回路基板21を係止することができる。
第2位置決め突起56を、第2位置決め貫通孔42に挿通し、第2係止部53により、第2回路基板22を、第2回路基板22の第4面22bから係止する。これにより、第2回路基板22が保持部材24に固定される。第2位置決め突起56の高さは、第2係止部53の高さよりも高い。したがって、第2位置決め突起56により第2回路基板22が保持部材24に対して位置決めされた状態で、第2係止部53により第2回路基板22を係止することができる。
また、第1回路基板21に実装される基板間コネクタ23のオスコネクタと、第2回路基板22に実装される基板間コネクタ23のメスコネクタとを互いに嵌合することで、基板間コネクタ23を介して第1回路基板21と第2回路基板22とが電気的に接続される。
具体的には、図9Aに示されるように、第1位置決め突起55を、第1位置決め貫通孔34に挿通し、第1係止部52により、第1回路基板21を、第1回路基板21の第2面21bから係止する。これにより、第1回路基板21が保持部材24に固定される。第1位置決め突起55の高さは、第1係止部52の高さよりも高い。したがって、第1位置決め突起55により第1回路基板21が保持部材24に対して位置決めされた状態で、第1係止部52により第1回路基板21を係止することができる。
第2位置決め突起56を、第2位置決め貫通孔42に挿通し、第2係止部53により、第2回路基板22を、第2回路基板22の第4面22bから係止する。これにより、第2回路基板22が保持部材24に固定される。第2位置決め突起56の高さは、第2係止部53の高さよりも高い。したがって、第2位置決め突起56により第2回路基板22が保持部材24に対して位置決めされた状態で、第2係止部53により第2回路基板22を係止することができる。
また、第1回路基板21に実装される基板間コネクタ23のオスコネクタと、第2回路基板22に実装される基板間コネクタ23のメスコネクタとを互いに嵌合することで、基板間コネクタ23を介して第1回路基板21と第2回路基板22とが電気的に接続される。
基板ユニット固定工程では、締結部材26により基板ユニット20をヒートシンク25に固定する。
具体的には、図9Bに示されるように、基板ユニット20を、第1回路基板21とヒートシンク25とが対向するよう配置する。なお、ヒートシンク25は、モータ1に予め取り付けられている。
図9Cに示されるように、基板ユニット20を、ヒートシンク25の上面に載置する。このとき、第1位置決め突起55をヒートシンク25の嵌合穴64(図9Bを参照)に嵌入することで、基板ユニット20がヒートシンク25に対して位置決めされる。配線端子17は,モータ端子接続孔32に挿通される。また、治具等により、第2回路基板22に対して、ヒートシンク25側(図9Cにおける矢印の向き)への荷重を印加し、第2回路基板22をヒートシンク25に向けて押圧する。第2回路基板22に印加される上記荷重は、荷重伝達部57を介して第1回路基板21に伝達される。これにより、第1回路基板21もまたヒートシンク25に向けて押圧され、ヒートシンク25と第1回路基板21に実装される電子部品28との間に塗布された放熱グリス29が押し広げられる。
その後、図9Dに示されるように、締結部材26を、第2回路基板22側から基板ユニット20の締結貫通孔に挿通し、ヒートシンク25の締結穴63に締結する。はんだ付け等により、配線端子17とモータ端子接続孔32とを電気的に接続する。このとき、第2回路基板22に切欠き部43が設けられているため、配線端子17をモータ端子接続孔32に接続するための接続用ツールが第2回路基板22に干渉することを防止できる。
具体的には、図9Bに示されるように、基板ユニット20を、第1回路基板21とヒートシンク25とが対向するよう配置する。なお、ヒートシンク25は、モータ1に予め取り付けられている。
図9Cに示されるように、基板ユニット20を、ヒートシンク25の上面に載置する。このとき、第1位置決め突起55をヒートシンク25の嵌合穴64(図9Bを参照)に嵌入することで、基板ユニット20がヒートシンク25に対して位置決めされる。配線端子17は,モータ端子接続孔32に挿通される。また、治具等により、第2回路基板22に対して、ヒートシンク25側(図9Cにおける矢印の向き)への荷重を印加し、第2回路基板22をヒートシンク25に向けて押圧する。第2回路基板22に印加される上記荷重は、荷重伝達部57を介して第1回路基板21に伝達される。これにより、第1回路基板21もまたヒートシンク25に向けて押圧され、ヒートシンク25と第1回路基板21に実装される電子部品28との間に塗布された放熱グリス29が押し広げられる。
その後、図9Dに示されるように、締結部材26を、第2回路基板22側から基板ユニット20の締結貫通孔に挿通し、ヒートシンク25の締結穴63に締結する。はんだ付け等により、配線端子17とモータ端子接続孔32とを電気的に接続する。このとき、第2回路基板22に切欠き部43が設けられているため、配線端子17をモータ端子接続孔32に接続するための接続用ツールが第2回路基板22に干渉することを防止できる。
コネクタ取付工程では、コネクタアセンブリ27を、第1回路基板21に接続する。
具体的には、図9Eに示されるように、基板ユニット固定工程が行われた後の回転電機100の中間構造体の上下を反転させる。コネクタアセンブリ27を、第1回路基板21の第2面21bと対向させる。コネクタ位置決め突起75(図7を参照)を、第1回路基板21のコネクタ位置決め貫通孔37に挿通する。コネクタアセンブリ27に対して、第1回路基板21側(図9Eにおける矢印の向き)への荷重を印加し、プレスフィット端子74を第1回路基板21のコネクタ端子接続孔35に圧入する。コネクタ位置決め突起75の高さは、プレスフィット端子74の高さよりも高い。したがって、コネクタ位置決め突起75によりコネクタアセンブリ27が第1回路基板21に対して位置決めされた状態で、プレスフィット端子74をコネクタ端子接続孔35に圧入することができる。
ここで、プレスフィット端子74をコネクタ端子接続孔35に圧入するときに、第1回路基板21には押圧力がかかる。第1回路基板21の第1面21aに不図示の受け治具を設置することにより、第1回路基板21にかかる押圧力を受け治具によって受け止めることができる。したがって、第1回路基板21の歪みを抑えることができ、プレスフィット端子74のコネクタ端子接続孔35への挿入量が不足することによるプレスフィット端子74の接続不良を防止することができる。
その後、第2締結部材77により、コネクタアセンブリ27をヒートシンク25にネジ固定する。
具体的には、図9Eに示されるように、基板ユニット固定工程が行われた後の回転電機100の中間構造体の上下を反転させる。コネクタアセンブリ27を、第1回路基板21の第2面21bと対向させる。コネクタ位置決め突起75(図7を参照)を、第1回路基板21のコネクタ位置決め貫通孔37に挿通する。コネクタアセンブリ27に対して、第1回路基板21側(図9Eにおける矢印の向き)への荷重を印加し、プレスフィット端子74を第1回路基板21のコネクタ端子接続孔35に圧入する。コネクタ位置決め突起75の高さは、プレスフィット端子74の高さよりも高い。したがって、コネクタ位置決め突起75によりコネクタアセンブリ27が第1回路基板21に対して位置決めされた状態で、プレスフィット端子74をコネクタ端子接続孔35に圧入することができる。
ここで、プレスフィット端子74をコネクタ端子接続孔35に圧入するときに、第1回路基板21には押圧力がかかる。第1回路基板21の第1面21aに不図示の受け治具を設置することにより、第1回路基板21にかかる押圧力を受け治具によって受け止めることができる。したがって、第1回路基板21の歪みを抑えることができ、プレスフィット端子74のコネクタ端子接続孔35への挿入量が不足することによるプレスフィット端子74の接続不良を防止することができる。
その後、第2締結部材77により、コネクタアセンブリ27をヒートシンク25にネジ固定する。
図9Fに示されるように、カバー取付工程では、コネクタ取付工程が行われた後の回転電機100の中間構造体の上下を再度反転させる。カバー70を上方からヒートシンク25に組み付ける。
これにより、回転電機100が完成する。
これにより、回転電機100が完成する。
以上説明したように、本実施の形態に係る回転電機100は、回転シャフト11を有するモータ1と、モータ1を制御する制御ユニット2と、を備える。制御ユニット2は、第1回路基板21および第2回路基板22と、第1回路基板21と第2回路基板22との間に配置され、第1回路基板21および第2回路基板22を保持する保持部材24と、を有する基板ユニット20と、モータ1と基板ユニット20との間に、軸方向において第1回路基板21と対向するよう配置されるヒートシンク25と、基板ユニット20をヒートシンク25に固定する締結部材26と、を備える。保持部材24は、基部51と、基部51に接続され、第1回路基板21を、第1回路基板21の第2面21bから係止する第1係止部52と、基部51に接続され、第2回路基板22を、第2回路基板22の第4面22bから係止する第2係止部53と、を有している。締結部材26は、基板ユニット20を軸方向に貫通し、ヒートシンク25に締結されている。
また、本実施の形態に係る回転電機100の製造方法は、保持部材24により第1回路基板21および第2回路基板22を保持して基板ユニット20を組み立てる基板ユニット組立工程と、基板ユニット20に対し、軸方向において締結部材26を貫通させ、締結部材26をヒートシンク25に締結することで、基板ユニット20をヒートシンク25に固定する基板ユニット固定工程と、を備える。
このような回転電機100または回転電機100の製造方法によれば、保持部材24により第1回路基板21および第2回路基板22を保持することで基板ユニット20が組み立てられる。その後、締結部材26により基板ユニット20をヒートシンク25に固定することで、第1回路基板21および第2回路基板22をヒートシンク25に対して一度に、かつ精度よく組み付けることができる。回路基板21、22を一枚ずつ組み付ける必要がなくなるため、回転電機100の製造が容易になる。また、回転電機100の製造ラインを、制御ユニットが一枚の回路基板により構成される回転電機の製造ラインと共用することができるため、製造コストを低減することができる。
また、例えば、回転シャフト11の回転角を検出する回転センサ30が第1回路基板21または第2回路基板22に実装される場合、第1回路基板21および第2回路基板22の回転シャフト11に対する位置がずれると、回転センサ30の検出精度が低下する可能性がある。第1回路基板21および第2回路基板22をヒートシンク25に対して精度良く組み付けることができるため、第1回路基板21および第2回路基板22の回転シャフト11に対する位置がずれることが防止でき、回転センサ30の検出精度の低下を防止することができる。
また、例えば、回転シャフト11の回転角を検出する回転センサ30が第1回路基板21または第2回路基板22に実装される場合、第1回路基板21および第2回路基板22の回転シャフト11に対する位置がずれると、回転センサ30の検出精度が低下する可能性がある。第1回路基板21および第2回路基板22をヒートシンク25に対して精度良く組み付けることができるため、第1回路基板21および第2回路基板22の回転シャフト11に対する位置がずれることが防止でき、回転センサ30の検出精度の低下を防止することができる。
また、保持部材24は、基部51に接続され、軸方向に延び、第1回路基板21および第2回路基板22と当接するスペーサ54、をさらに有する。締結部材26は、スペーサ54に挿通されている。
この構成によれば、スペーサ54により、第1回路基板21と第2回路基板22との間の間隔を確保することができる。したがって、回転電機100の製造がより容易になる。また、スペーサ54を用いて、基板ユニット20をヒートシンク25に固定することができる。したがって、基板ユニット20をヒートシンク25に固定するための固定ボス等を別途設ける必要がないため、部品数の増加を抑えることができ、第1回路基板21および第2回路基板22における電子部品の実装面積が減少することを抑えることができる。
この構成によれば、スペーサ54により、第1回路基板21と第2回路基板22との間の間隔を確保することができる。したがって、回転電機100の製造がより容易になる。また、スペーサ54を用いて、基板ユニット20をヒートシンク25に固定することができる。したがって、基板ユニット20をヒートシンク25に固定するための固定ボス等を別途設ける必要がないため、部品数の増加を抑えることができ、第1回路基板21および第2回路基板22における電子部品の実装面積が減少することを抑えることができる。
また、保持部材24は、基部51に接続され、第1回路基板21を軸方向に貫通するとともにヒートシンク25に挿入される第1位置決め突起55と、基部51に接続され、第2回路基板22を軸方向に貫通する第2位置決め突起56と、を有している。
この構成によれば、第1位置決め突起55および第2位置決め突起56により、第1回路基板21および第2回路基板22をヒートシンク25に対して位置決めできる。したがって、第1回路基板21および第2回路基板22をヒートシンク25に対してより精度良く組み付けることができる。
この構成によれば、第1位置決め突起55および第2位置決め突起56により、第1回路基板21および第2回路基板22をヒートシンク25に対して位置決めできる。したがって、第1回路基板21および第2回路基板22をヒートシンク25に対してより精度良く組み付けることができる。
また、第1回路基板21に電子部品28が実装され、ヒートシンク25と電子部品28との間には、放熱グリス29が設けられている。保持部材24は、平面視において放熱グリス29と重なる位置に配置され、第1回路基板21および第2回路基板22と当接する荷重伝達部57、をさらに有している。
この構成によれば、回転電機100の製造時に第2回路基板22に印加される荷重が、荷重伝達部57を介して第1回路基板21に伝達され、これによりヒートシンク25と電子部品28との間に設けられる放熱グリス29を押し広げることができる。
この構成によれば、回転電機100の製造時に第2回路基板22に印加される荷重が、荷重伝達部57を介して第1回路基板21に伝達され、これによりヒートシンク25と電子部品28との間に設けられる放熱グリス29を押し広げることができる。
また、モータ1は、回転シャフト11に固定されるロータ12と、ロータ12の外周側に配置されるステータ13と、ステータ13に巻装される電機子巻線15と、電機子巻線15と電気的に接続されるとともに第1回路基板21に接続される配線端子17と、を備える。第1回路基板21は、配線端子17が接続されるモータ端子接続孔32を有している。第2回路基板22は、基板ユニット20を軸方向に沿って第2回路基板22側から見たときに、モータ端子接続孔32を露出させる切欠き部43を有する。
この構成によれば、例えば配線端子17をモータ端子接続孔32に接続するための接続用ツールを、切欠き部43を介して配線端子17とモータ端子接続孔32との接続部に接近させることができる。したがって、切欠き部43を介して配線端子17とモータ端子接続孔32との接続を容易に行うことができる。したがって、回転電機100の製造がより容易になる。
この構成によれば、例えば配線端子17をモータ端子接続孔32に接続するための接続用ツールを、切欠き部43を介して配線端子17とモータ端子接続孔32との接続部に接近させることができる。したがって、切欠き部43を介して配線端子17とモータ端子接続孔32との接続を容易に行うことができる。したがって、回転電機100の製造がより容易になる。
また、軸方向から見たときに、締結部材26の頭部の外形が、スペーサ54の外形と略同一である。
この構成によれば、締結部材26の頭部が設けられるスペースの増加を抑えつつ、締結部材26を締結するときに発生する力をスペーサ54により確実に受け止めることができる。
この構成によれば、締結部材26の頭部が設けられるスペースの増加を抑えつつ、締結部材26を締結するときに発生する力をスペーサ54により確実に受け止めることができる。
また、制御ユニット2は、第1回路基板21に接続されるプレスフィット端子74を有するコネクタアセンブリ27、をさらに備える。第1回路基板21は、第1回路基板21における第1方向D1の一端部に設けられ、プレスフィット端子74が接続されるコネクタ端子接続孔35を有している。基板ユニット20を軸方向に沿って第2回路基板22側から見たときに、第2回路基板22から第1回路基板21における第1方向D1の一端部が露出するよう、第2回路基板22の第1方向D1における長さは、第1回路基板21の第1方向D1における長さよりも短くなっている。
この構成によれば、プレスフィット端子74を用いて、コネクタアセンブリ27を第1回路基板21に容易に接続することができる。したがって、回転電機100の製造がより容易になる。
また、プレスフィット端子74をコネクタ端子接続孔35に接続するときに、第1回路基板21における第1方向D1の一端部には押圧力がかかる。第2回路基板22から第1回路基板21の上記一端部が露出しているため、第1回路基板21に、上記一端部を支持する受け治具を容易に設置することができる。受け治具により第1回路基板21にかかる押圧力を受け止めることで、第1回路基板21の歪みを抑えることができる。また、プレスフィット端子74のコネクタ端子接続孔35への挿入量が不足することによるプレスフィット端子74の接続不良を防止することができる。
この構成によれば、プレスフィット端子74を用いて、コネクタアセンブリ27を第1回路基板21に容易に接続することができる。したがって、回転電機100の製造がより容易になる。
また、プレスフィット端子74をコネクタ端子接続孔35に接続するときに、第1回路基板21における第1方向D1の一端部には押圧力がかかる。第2回路基板22から第1回路基板21の上記一端部が露出しているため、第1回路基板21に、上記一端部を支持する受け治具を容易に設置することができる。受け治具により第1回路基板21にかかる押圧力を受け止めることで、第1回路基板21の歪みを抑えることができる。また、プレスフィット端子74のコネクタ端子接続孔35への挿入量が不足することによるプレスフィット端子74の接続不良を防止することができる。
また、コネクタアセンブリ27は、第1回路基板21に挿通されるコネクタ位置決め突起75を有している。
この構成によれば、コネクタ位置決め突起75によりコネクタアセンブリ27が第1回路基板21に対して位置決めされるため、プレスフィット端子74をコネクタ端子接続孔35により確実に接続することができる。
この構成によれば、コネクタ位置決め突起75によりコネクタアセンブリ27が第1回路基板21に対して位置決めされるため、プレスフィット端子74をコネクタ端子接続孔35により確実に接続することができる。
また、コネクタ位置決め突起75の先端は、プレスフィット端子74の先端よりも第1回路基板21側に位置する。
この構成によれば、コネクタ位置決め突起75によりコネクタアセンブリ27が第1回路基板21に対して位置決めされた状態で、プレスフィット端子74をコネクタ端子接続孔35に接続することができる。したがって、プレスフィット端子74をコネクタ端子接続孔35により確実に接続することができる。
この構成によれば、コネクタ位置決め突起75によりコネクタアセンブリ27が第1回路基板21に対して位置決めされた状態で、プレスフィット端子74をコネクタ端子接続孔35に接続することができる。したがって、プレスフィット端子74をコネクタ端子接続孔35により確実に接続することができる。
また、基板ユニット20は、第1回路基板21と第2回路基板22とを電気的に接続する基板間コネクタ23、をさらに有する。
この構成によれば、基板間コネクタ23により第1回路基板21と第2回路基板22とを容易に電気的に接続することができる。
この構成によれば、基板間コネクタ23により第1回路基板21と第2回路基板22とを容易に電気的に接続することができる。
実施の形態2.
次に、実施の形態2に係る回転電機100Aについて説明する。本実施の形態に係る回転電機100Aは、基本的な構成は実施の形態1と同様であるため、異なる点を中心に説明する。
次に、実施の形態2に係る回転電機100Aについて説明する。本実施の形態に係る回転電機100Aは、基本的な構成は実施の形態1と同様であるため、異なる点を中心に説明する。
図10は、回転電機100Aの中間構造体を下方から見た斜視図である。図11は、図10のA-A断面図である。
本実施の形態では、コネクタアセンブリ27Aが、第1回路基板21Aおよび第2回路基板22Aに接続される点において、実施の形態1と異なる。
本実施の形態では、コネクタアセンブリ27Aが、第1回路基板21Aおよび第2回路基板22Aに接続される点において、実施の形態1と異なる。
図10および図11に示されるように、コネクタアセンブリ27Aは、プレスフィット端子74の代わりに、第1回路基板21Aに接続される第1プレスフィット端子81と、第2回路基板22Aに接続される第2プレスフィット端子82と、を有する。
第1プレスフィット端子81は、コネクタアセンブリ27Aにおける第2方向D2の中央部に配置される。第2プレスフィット端子82は、第2方向D2において第1プレスフィット端子81の両側に配置される。第2プレスフィット端子82の高さは、第1プレスフィット端子81の高さよりも高い。すなわち、第2プレスフィット端子82の先端は、第1プレスフィット端子81の先端よりも第2回路基板22A側に位置する。
第1プレスフィット端子81は、コネクタアセンブリ27Aにおける第2方向D2の中央部に配置される。第2プレスフィット端子82は、第2方向D2において第1プレスフィット端子81の両側に配置される。第2プレスフィット端子82の高さは、第1プレスフィット端子81の高さよりも高い。すなわち、第2プレスフィット端子82の先端は、第1プレスフィット端子81の先端よりも第2回路基板22A側に位置する。
本実施の形態において、第2回路基板22Aの第1方向D1における長さは、第1回路基板21Aの第1方向D1における長さと略同一である。平面視において、第2回路基板22Aは、第1回路基板21の第1方向D1における一端部と重なるよう設けられている。
図12は、第1回路基板21Aの上方からの斜視図である。図12に示されるように、第1回路基板21Aには、コネクタ端子接続孔35の代わりに、第1プレスフィット端子81が接続される第1コネクタ端子接続孔38(第1コネクタ接続部)が設けられている。第1コネクタ端子接続孔38は、第1回路基板21Aにおける第1方向D1の一端部に設けられる。第1コネクタ端子接続孔38は、第1回路基板21Aにおける第2方向D2の中央部に配置される。
第1回路基板21Aには、第2プレスフィット端子82が挿通されるコネクタ端子貫通孔39が設けられている。コネクタ端子貫通孔39は、第1回路基板21Aにおける第1方向D1の一端部に設けられる。コネクタ端子貫通孔39は、第2方向D2において第1コネクタ端子接続孔38の両側に配置される。平面視において、コネクタ端子貫通孔39の大きさは、第2プレスフィット端子82の大きさよりも大きい。したがって、第2プレスフィット端子82がコネクタ端子貫通孔39に挿通されたときに、第2プレスフィット端子82とコネクタ端子貫通孔39とが接触することが防止される。なお、コネクタ端子貫通孔39の代わりに、第1回路基板21Aに、第1回路基板21Aと第2プレスフィット端子82との干渉を防止するための切欠き部が形成されていてもよい。
図13は、第2回路基板22Aの上方からの斜視図である。図13に示されるように、第2回路基板22Aには、第2プレスフィット端子82が接続される第2コネクタ端子接続孔45(第2コネクタ接続部)が設けられている。第2コネクタ端子接続孔45は、第2回路基板22Aにおける第1方向D1の一端部に設けられる。
図14は、保持部材24Aの上方からの斜視図である。図14に示されるように、本実施の形態では、保持部材24Aは、支持部58をさらに有する。支持部58は、内側空間を有する枠状である。支持部58は、基部51における第1方向D1の一端部に接続される。支持部58は、第1回路基板21Aおよび第2回路基板22Aと当接する。支持部58は、平面視において、第1回路基板21Aの第1コネクタ端子接続孔38を囲うよう設けられる。支持部58は、第1回路基板21Aにおける第1コネクタ端子接続孔38の周囲を支持する。支持部58の内側空間には、第1コネクタ端子接続孔38に接続された第1プレスフィット端子81の先端が収容される。これにより、第1プレスフィット端子81と保持部材24Aとが接触することが防止される。
本実施の形態に係る回転電機100Aの製造方法では、コネクタ取付工程において、コネクタアセンブリ27Aを、第1回路基板21Aおよび第2回路基板22Aに接続する。なお、その他の工程(基板ユニット組立工程、基板ユニット固定工程、およびカバー取付工程)は実施の形態1と同様であるため、ここでは記載を省略する。
コネクタ取付工程では、まず、基板ユニット固定工程が行われた後の回転電機100Aの中間構造体の上下を反転させる。コネクタアセンブリ27Aを、第1回路基板21Aの第2面21bと対向させる。コネクタ位置決め突起75を、第1回路基板21Aのコネクタ位置決め貫通孔37に挿通する。このとき、第2プレスフィット端子82は、第1回路基板21Aのコネクタ端子貫通孔39に挿通される。第2回路基板22Aの第4面22bに、受け治具200を設置する。コネクタアセンブリ27Aに対して、第1回路基板21A側への荷重を印加する。これにより、第1プレスフィット端子81を第1回路基板21Aの第1コネクタ端子接続孔38に圧入し、第2プレスフィット端子82を第2回路基板22Aの第2コネクタ端子接続孔45に圧入する。
ここで、第1プレスフィット端子81を第1コネクタ端子接続孔38に圧入するときに、第1回路基板21Aには押圧力がかかる。また、第2プレスフィット端子82を第2コネクタ端子接続孔45に圧入するときに、第2回路基板22Aには押圧力がかかる。本実施の形態では、支持部58が、第1回路基板21Aと第2回路基板22Aとの間において、第1コネクタ端子接続孔38を囲うよう設けられる。したがって、第1回路基板21Aにおける第1コネクタ端子接続孔38の周囲は、支持部58によって支持される。また、第2回路基板22Aの第4面22bに、受け治具200が設けられる。これにより、第1回路基板21Aにかかる押圧力を、支持部58を介して受け治具200によって受け止めることができる。また、第2回路基板22Aにかかる押圧力を、受け治具200によって受け止めることができる。したがって、第1回路基板21Aの歪みを抑えることができ、第1プレスフィット端子81の第1コネクタ端子接続孔38への挿入量が不足することによる第1プレスフィット端子81の接続不良を防止することができる。また、第2回路基板22Aの歪みを抑えることができ、第2プレスフィット端子82の第2コネクタ端子接続孔45への挿入量が不足することによる第2プレスフィット端子82の接続不良を防止することができる。
その後、第2締結部材77により、コネクタアセンブリ27Aをヒートシンク25にネジ固定する。
その後、第2締結部材77により、コネクタアセンブリ27Aをヒートシンク25にネジ固定する。
以上説明したように、本実施の形態に係る回転電機100Aにおいて、コネクタアセンブリ27Aは、第2回路基板22Aに接続される第2プレスフィット端子82をさらに有する。第2回路基板22Aは、第2回路基板22Aにおける第1方向D1の一端部に設けられ、第2プレスフィット端子82が接続される第2コネクタ端子接続孔45を有している。保持部材24Aは、軸方向から見たときに第1コネクタ端子接続孔38を囲うよう設けられ、第1回路基板21Aおよび第2回路基板22Aと当接する支持部58、をさらに有している。
この構成によれば、外部のセンサからの信号等をコネクタアセンブリ27Aから第2回路基板22Aへ直接入力することができる。基板間コネクタ23に、上記信号等を第1回路基板21Aから第2回路基板22Aへ伝送するための端子等を設けることが不要となり、基板間コネクタ23を小型化することができる。したがって、第1回路基板21Aおよび第2回路基板22Aにおける、電子部品の実装面積を拡大することができる。
また、支持部58により、第1回路基板21Aにおける第1コネクタ端子接続孔38の周囲が支持される。第1プレスフィット端子81および第2プレスフィット端子82を第1コネクタ端子接続孔38および第2コネクタ端子接続孔45にそれぞれ接続するときに、第1回路基板21Aおよび第2回路基板22Aには押圧力がかかる。支持部58を用いて上記押圧力を受け止めることができるため、第1回路基板21Aおよび第2回路基板22Aの歪みを抑えることができる。また、第1プレスフィット端子81の第1コネクタ端子接続孔38への挿入量が不足することによる第1プレスフィット端子81の接続不良、および第2プレスフィット端子82の第2コネクタ端子接続孔45への挿入量が不足することによる第2プレスフィット端子82の接続不良を防止することができる。
この構成によれば、外部のセンサからの信号等をコネクタアセンブリ27Aから第2回路基板22Aへ直接入力することができる。基板間コネクタ23に、上記信号等を第1回路基板21Aから第2回路基板22Aへ伝送するための端子等を設けることが不要となり、基板間コネクタ23を小型化することができる。したがって、第1回路基板21Aおよび第2回路基板22Aにおける、電子部品の実装面積を拡大することができる。
また、支持部58により、第1回路基板21Aにおける第1コネクタ端子接続孔38の周囲が支持される。第1プレスフィット端子81および第2プレスフィット端子82を第1コネクタ端子接続孔38および第2コネクタ端子接続孔45にそれぞれ接続するときに、第1回路基板21Aおよび第2回路基板22Aには押圧力がかかる。支持部58を用いて上記押圧力を受け止めることができるため、第1回路基板21Aおよび第2回路基板22Aの歪みを抑えることができる。また、第1プレスフィット端子81の第1コネクタ端子接続孔38への挿入量が不足することによる第1プレスフィット端子81の接続不良、および第2プレスフィット端子82の第2コネクタ端子接続孔45への挿入量が不足することによる第2プレスフィット端子82の接続不良を防止することができる。
実施の形態2の変形例.
図15は、実施の形態2の変形例に係る保持部材24Aの下方からの斜視図である。
本変形例では、保持部材24Aは、案内部84をさらに有する。案内部84は、案内部84を軸方向に貫通する案内貫通孔84aを有する。複数の案内貫通孔84aは、平面視において複数の第2コネクタ端子接続孔45と重なる位置に配置される。案内貫通孔84aの下端部(一方側の端部)は、下方(一方側)に向かうに従い漸次拡径するテーパ状に形成されている。
コネクタ取付工程において、第2プレスフィット端子82は、案内貫通孔84aに下方(一方側)から挿入される。案内貫通孔84aの下端部がテーパ状に形成されているため、第2プレスフィット端子82を案内貫通孔84aに円滑に挿入することができる。第2プレスフィット端子82は、案内貫通孔84aにより第2コネクタ端子接続孔45に向けて案内されて、第2コネクタ端子接続孔45に圧入される。
なお、平面視において、案内貫通孔84aの大きさは、第2プレスフィット端子82の大きさより大きい。したがって、第2プレスフィット端子82が案内貫通孔84aに挿通されたときに、第2プレスフィット端子82と案内貫通孔84aとが接触することが防止される。
図15は、実施の形態2の変形例に係る保持部材24Aの下方からの斜視図である。
本変形例では、保持部材24Aは、案内部84をさらに有する。案内部84は、案内部84を軸方向に貫通する案内貫通孔84aを有する。複数の案内貫通孔84aは、平面視において複数の第2コネクタ端子接続孔45と重なる位置に配置される。案内貫通孔84aの下端部(一方側の端部)は、下方(一方側)に向かうに従い漸次拡径するテーパ状に形成されている。
コネクタ取付工程において、第2プレスフィット端子82は、案内貫通孔84aに下方(一方側)から挿入される。案内貫通孔84aの下端部がテーパ状に形成されているため、第2プレスフィット端子82を案内貫通孔84aに円滑に挿入することができる。第2プレスフィット端子82は、案内貫通孔84aにより第2コネクタ端子接続孔45に向けて案内されて、第2コネクタ端子接続孔45に圧入される。
なお、平面視において、案内貫通孔84aの大きさは、第2プレスフィット端子82の大きさより大きい。したがって、第2プレスフィット端子82が案内貫通孔84aに挿通されたときに、第2プレスフィット端子82と案内貫通孔84aとが接触することが防止される。
以上説明したように、本変形例に係る保持部材24Aは、第2プレスフィット端子82が一方側から挿通される案内貫通孔84aを有する案内部84を有している。案内貫通孔84aの一方側の端部はテーパ状に形成されている。
この構成によれば、案内部84により第2プレスフィット端子82を第2コネクタ端子接続孔45に向けて案内することで、第2プレスフィット端子82の位置と第2コネクタ端子接続孔45の位置とのずれを防止することができる。これにより、第2プレスフィット端子82を確実に第2コネクタ端子接続孔45に挿入することができる。また、第2プレスフィット端子82の位置と第2コネクタ端子接続孔45の位置とがずれることによる、第2プレスフィット端子82の座屈、第2コネクタ端子接続孔45の損傷、等を防止できる。また、案内貫通孔84aの一方側の端部がテーパ状に形成されるため、第2プレスフィット端子82を案内貫通孔84aに円滑に挿入することができる。したがって、部品数を増やすことなく、第2プレスフィット端子82の接続部の信頼性を向上することができる。
この構成によれば、案内部84により第2プレスフィット端子82を第2コネクタ端子接続孔45に向けて案内することで、第2プレスフィット端子82の位置と第2コネクタ端子接続孔45の位置とのずれを防止することができる。これにより、第2プレスフィット端子82を確実に第2コネクタ端子接続孔45に挿入することができる。また、第2プレスフィット端子82の位置と第2コネクタ端子接続孔45の位置とがずれることによる、第2プレスフィット端子82の座屈、第2コネクタ端子接続孔45の損傷、等を防止できる。また、案内貫通孔84aの一方側の端部がテーパ状に形成されるため、第2プレスフィット端子82を案内貫通孔84aに円滑に挿入することができる。したがって、部品数を増やすことなく、第2プレスフィット端子82の接続部の信頼性を向上することができる。
実施の形態3.
次に、実施の形態3に係る回転電機100Bについて説明する。本実施の形態に係る回転電機100Bは、基本的な構成は実施の形態1と同様であるため、異なる点を中心に説明する。
次に、実施の形態3に係る回転電機100Bについて説明する。本実施の形態に係る回転電機100Bは、基本的な構成は実施の形態1と同様であるため、異なる点を中心に説明する。
実施の形態3では、制御ユニット2が、第3回路基板91と、第2保持部材92と、第2基板間コネクタ93と、をさらに備える点において、実施の形態1と異なる。基板ユニット20Aは、第1回路基板21と、第2回路基板22と、基板間コネクタ23と、保持部材24と、第3回路基板91と、第2保持部材92と、第2基板間コネクタ93と、により構成される。
第3回路基板91は、第2回路基板22の上方に配置される。第2基板間コネクタ93は、軸方向において第2回路基板22と第3回路基板91との間に配置される。第2基板間コネクタ93は、第2回路基板22と第3回路基板91とを電気的に接続する。
本実施の形態では、保持部材24の第2位置決め突起56は、第2回路基板22および第3回路基板91を軸方向に貫通する。第2位置決め突起56により、第2回路基板22および第3回路基板91が保持部材24に対して位置決めされる。
第2保持部材92は、軸方向において第2回路基板22と第3回路基板91との間に配置される。第2保持部材92は、第2回路基板22および第3回路基板91を保持する。実施の形態1に係る保持部材24と同様に、第2保持部材92は、第2回路基板22を、第2回路基板22の第3面22aから係止する不図示の第3係止部と、第3回路基板91を、第3回路基板91の上面から係止する不図示の第4係止部と、を有している。
第2保持部材92は、第2スペーサ92aと、第2荷重伝達部92bと、を有する。
第2スペーサ92aは、軸方向に延びる円筒状である。複数の第2スペーサ92aが、平面視において複数のスペーサ54と重なる位置に配置される。第2スペーサ92aにおける軸方向の一端は第2回路基板22と当接し、第2スペーサ92aにおける軸方向の他端は第3回路基板91と当接する。第2スペーサ92aにより、第2回路基板22と第3回路基板91との間の間隔が確保される。第2スペーサ92aは、第2スペーサ92aを軸方向に貫通する第4締結貫通孔を有する。第4締結貫通孔には、締結部材26が挿通される。
第2荷重伝達部92bは、平面視において放熱グリス29と重なる位置に配置される。第2荷重伝達部92bは、第2回路基板22および第3回路基板91と当接する。回転電機100の製造時に第3回路基板91に印加される荷重は、第2荷重伝達部92b、第2回路基板22、および荷重伝達部57を介して第1回路基板21に伝達される。これにより、第1回路基板21がヒートシンク25に向けて押圧され、ヒートシンク25と第1回路基板21に実装される電子部品28との間に塗布された放熱グリス29が押し広げられる。
第2スペーサ92aは、軸方向に延びる円筒状である。複数の第2スペーサ92aが、平面視において複数のスペーサ54と重なる位置に配置される。第2スペーサ92aにおける軸方向の一端は第2回路基板22と当接し、第2スペーサ92aにおける軸方向の他端は第3回路基板91と当接する。第2スペーサ92aにより、第2回路基板22と第3回路基板91との間の間隔が確保される。第2スペーサ92aは、第2スペーサ92aを軸方向に貫通する第4締結貫通孔を有する。第4締結貫通孔には、締結部材26が挿通される。
第2荷重伝達部92bは、平面視において放熱グリス29と重なる位置に配置される。第2荷重伝達部92bは、第2回路基板22および第3回路基板91と当接する。回転電機100の製造時に第3回路基板91に印加される荷重は、第2荷重伝達部92b、第2回路基板22、および荷重伝達部57を介して第1回路基板21に伝達される。これにより、第1回路基板21がヒートシンク25に向けて押圧され、ヒートシンク25と第1回路基板21に実装される電子部品28との間に塗布された放熱グリス29が押し広げられる。
本実施の形態に係る回転電機100Bの製造方法では、基板ユニット組立工程において、保持部材24および第2保持部材92により第1回路基板21、第2回路基板22、および第3回路基板91を保持して基板ユニット20Aを組み立てる。このとき、第2位置決め突起56により、第2回路基板22および第3回路基板91が保持部材24に対して位置決めされるため、実施の形態1と同様の精度にて基板ユニット20Aを組み立てることができる。
なお、その他の工程(基板ユニット組立工程、コネクタ取付工程、およびカバー取付工程)は実施の形態1と同様であるため、ここでは記載を省略する。
なお、その他の工程(基板ユニット組立工程、コネクタ取付工程、およびカバー取付工程)は実施の形態1と同様であるため、ここでは記載を省略する。
以上説明したように、本実施の形態に係る回転電機100Bにおいて、基板ユニット20Aは、第3回路基板91と、第2回路基板22と第3回路基板91との間に配置され、第2回路基板22および第3回路基板91を保持する第2保持部材92と、をさらに有する。
この構成によれば、制御ユニット2における回路基板の数が増加したとしても、実施の形態1と同様の効果が得られる。すなわち、保持部材24および第2保持部材92により第1回路基板21、第2回路基板22、および第3回路基板91を保持することで基板ユニット20Aが組み立てられる。その後、締結部材26により基板ユニット20Aをヒートシンク25に固定することで、第1回路基板21、第2回路基板22、および第3回路基板91をヒートシンク25に一度に、かつ精度良く組み付けることができる。回路基板21、22、91を一枚ずつ組み付ける必要がないため、回転電機100Bの製造が容易になる。また、回転電機100Bの製造ラインを、制御ユニットが一枚の回路基板により構成される回転電機の製造ラインと共用することができるため、製造コストを低減することができる。
なお、制御ユニット2における回路基板の数が4枚以上の場合にも、同様の効果が得られる。
この構成によれば、制御ユニット2における回路基板の数が増加したとしても、実施の形態1と同様の効果が得られる。すなわち、保持部材24および第2保持部材92により第1回路基板21、第2回路基板22、および第3回路基板91を保持することで基板ユニット20Aが組み立てられる。その後、締結部材26により基板ユニット20Aをヒートシンク25に固定することで、第1回路基板21、第2回路基板22、および第3回路基板91をヒートシンク25に一度に、かつ精度良く組み付けることができる。回路基板21、22、91を一枚ずつ組み付ける必要がないため、回転電機100Bの製造が容易になる。また、回転電機100Bの製造ラインを、制御ユニットが一枚の回路基板により構成される回転電機の製造ラインと共用することができるため、製造コストを低減することができる。
なお、制御ユニット2における回路基板の数が4枚以上の場合にも、同様の効果が得られる。
なお、各実施の形態を組み合わせたり、各実施の形態を適宜、変形、省略したりすることが可能である。
ヒートシンク25は、回転電機100のモータケース14と一体に形成されていてもよい。
例えば、締結部材26は、基板ユニット20をヒートシンク25に固定できればよく、ネジに限定されない。
締結部材26、保持部材24の第1係止部52、第2係止部53、スペーサ54、第1位置決め突起55、および第2位置決め突起56、並びにコネクタアセンブリ27のプレスフィット端子74、等の数や配置は、回転電機100の仕様に応じて適宜変更されてもよい。
例えば、締結部材26は、基板ユニット20をヒートシンク25に固定できればよく、ネジに限定されない。
締結部材26、保持部材24の第1係止部52、第2係止部53、スペーサ54、第1位置決め突起55、および第2位置決め突起56、並びにコネクタアセンブリ27のプレスフィット端子74、等の数や配置は、回転電機100の仕様に応じて適宜変更されてもよい。
1…モータ、2…制御ユニット、11…回転シャフト、12…ロータ、13…ステータ、15…電機子巻線、16…環状配線部、17…配線端子、20、20A…基板ユニット、21、21A…第1回路基板、22、22A…第2回路基板、23…基板間コネクタ、24、24A…保持部材、25…ヒートシンク、26…締結部材、27、27A…コネクタアセンブリ、28…電子部品、29…放熱グリス、32…モータ端子接続孔(モータ接続部)、35…コネクタ端子接続孔(第1コネクタ接続部)、38…第1コネクタ端子接続孔(第1コネクタ接続部)、39…コネクタ端子貫通孔、43…切欠き部、45…第2コネクタ端子接続孔(第2コネクタ接続部)、51…基部、52…第1係止部、53…第2係止部、54…スペーサ、55…第1位置決め突起、56…第2位置決め突起、57…荷重伝達部、58…支持部、74…プレスフィット端子(第1プレスフィット端子)、75…コネクタ位置決め突起、81…第1プレスフィット端子、82…第2プレスフィット端子、84…案内部、84a…案内貫通孔、91…第3回路基板、92…第2保持部材、100、100A、100B…回転電機
Claims (14)
- 回転シャフトを有するモータと、
前記モータを制御する制御ユニットと、
を備え、
前記制御ユニットは、
第1回路基板および第2回路基板と、前記第1回路基板と前記第2回路基板との間に配置され、前記第1回路基板および前記第2回路基板を保持する保持部材と、を有する基板ユニットと、
前記モータと前記基板ユニットとの間に、前記回転シャフトの軸方向において前記第1回路基板と対向するよう配置されるヒートシンクと、
前記基板ユニットを前記ヒートシンクに固定する締結部材と、を備え、
前記保持部材は、
基部と、
前記基部に接続され、前記第1回路基板を、前記第1回路基板のうち前記基部と対向する第1面とは反対側の第2面から係止する第1係止部と、
前記基部に接続され、前記第2回路基板を、前記第2回路基板のうち前記基部と対向する第3面とは反対側の第4面から係止する第2係止部と、
を有しており、
前記締結部材は、前記基板ユニットを前記軸方向に貫通し、前記ヒートシンクに締結されている、
回転電機。 - 前記保持部材は、前記基部に接続され、前記軸方向に延び、前記第1回路基板および前記第2回路基板と当接するスペーサ、をさらに有し、
前記締結部材は、前記スペーサに挿通されている、
請求項1に記載の回転電機。 - 前記保持部材は、
前記基部に接続され、前記第1回路基板を前記軸方向に貫通するとともに前記ヒートシンクに挿入される第1位置決め突起と、
前記基部に接続され、前記第2回路基板を前記軸方向に貫通する第2位置決め突起と、
を有している、
請求項1または2に記載の回転電機。 - 前記第1回路基板に電子部品が実装され、
前記ヒートシンクと前記電子部品との間には、放熱グリスが設けられており、
前記保持部材は、前記軸方向から見たときに前記放熱グリスと重なる位置に配置され、前記第1回路基板および前記第2回路基板と当接する荷重伝達部、をさらに有している、
請求項1から3のいずれか一項に記載の回転電機。 - 前記モータは、前記回転シャフトに固定されるロータと、前記ロータの外周側に配置されるステータと、前記ステータに巻装される電機子巻線と、前記電機子巻線と電気的に接続されるとともに前記第1回路基板に接続される配線端子と、を備え、
前記第1回路基板は、前記配線端子が接続されるモータ接続部を有しており、
前記第2回路基板は、前記基板ユニットを前記軸方向に沿って前記第2回路基板側から見たときに、前記モータ接続部を露出させる切欠き部を有する、
請求項1から4のいずれか一項に記載の回転電機。 - 前記軸方向から見たときに、前記締結部材の頭部の外形が、前記スペーサの外形と略同一である、請求項2に記載の回転電機。
- 前記制御ユニットは、前記第1回路基板に接続される第1プレスフィット端子を有するコネクタアセンブリ、をさらに備え、
前記第1回路基板は、前記第1回路基板のうち、前記軸方向と直交する第1方向の一端部に設けられ、前記第1プレスフィット端子が接続される第1コネクタ接続部を有しており、
前記基板ユニットを前記軸方向に沿って前記第2回路基板側から見たときに、前記第2回路基板から前記第1回路基板における前記第1方向の前記一端部が露出するよう、前記第2回路基板の前記第1方向における長さは、前記第1回路基板の前記第1方向における長さよりも短くなっている、
請求項1から6のいずれか一項に記載の回転電機。 - 前記コネクタアセンブリは、前記第2回路基板に接続される第2プレスフィット端子をさらに有し、
前記第2回路基板は、前記第2回路基板における前記第1方向の一端部に設けられ、前記第2プレスフィット端子が接続される第2コネクタ接続部を有しており、
前記保持部材は、前記軸方向から見たときに前記第1コネクタ接続部を囲うよう設けられ、前記第1回路基板および前記第2回路基板と当接する支持部、をさらに有している、
請求項7に記載の回転電機。 - 前記保持部材は、前記第2プレスフィット端子が一方側から挿通される案内貫通孔を有する案内部を有しており、
前記案内貫通孔の前記一方側の端部はテーパ状に形成されている、
請求項8に記載の回転電機。 - 前記コネクタアセンブリは、前記第1回路基板に挿通されるコネクタ位置決め突起を有している、請求項7から9のいずれか一項に記載の回転電機。
- 前記コネクタ位置決め突起の先端は、前記第1プレスフィット端子の先端よりも前記第1回路基板側に位置する、請求項10に記載の回転電機。
- 前記基板ユニットは、第3回路基板と、前記第2回路基板と前記第3回路基板との間に配置され、前記第2回路基板および前記第3回路基板を保持する第2保持部材と、をさらに有する、請求項1から11のいずれか一項に記載の回転電機。
- 前記基板ユニットは、前記第1回路基板と前記第2回路基板とを電気的に接続する基板間コネクタ、をさらに有する、請求項1から12のいずれか一項に記載の回転電機。
- 保持部材により第1回路基板および第2回路基板を保持して基板ユニットを組み立てる基板ユニット組立工程と、
前記基板ユニットに対し、モータの回転シャフトの軸方向において締結部材を貫通させ、前記締結部材をヒートシンクに締結することで、前記基板ユニットを前記ヒートシンクに固定する基板ユニット固定工程と、
を備える、回転電機の製造方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2022/036342 WO2024069830A1 (ja) | 2022-09-29 | 2022-09-29 | 回転電機およびその製造方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2022/036342 WO2024069830A1 (ja) | 2022-09-29 | 2022-09-29 | 回転電機およびその製造方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2024069830A1 true WO2024069830A1 (ja) | 2024-04-04 |
Family
ID=90476844
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2022/036342 WO2024069830A1 (ja) | 2022-09-29 | 2022-09-29 | 回転電機およびその製造方法 |
Country Status (1)
| Country | Link |
|---|---|
| WO (1) | WO2024069830A1 (ja) |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017103848A (ja) * | 2015-11-30 | 2017-06-08 | 日本精工株式会社 | 電動機及びこれを備えた車載用装置、端子接続構造 |
| JP2020127334A (ja) * | 2019-02-06 | 2020-08-20 | 日立オートモティブシステムズ株式会社 | 電動駆動装置 |
-
2022
- 2022-09-29 WO PCT/JP2022/036342 patent/WO2024069830A1/ja unknown
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017103848A (ja) * | 2015-11-30 | 2017-06-08 | 日本精工株式会社 | 電動機及びこれを備えた車載用装置、端子接続構造 |
| JP2020127334A (ja) * | 2019-02-06 | 2020-08-20 | 日立オートモティブシステムズ株式会社 | 電動駆動装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2018096710A1 (ja) | モータ及び電動パワーステアリング装置 | |
| WO2018029894A1 (ja) | モータ及び電動パワーステアリング装置 | |
| WO2013094086A1 (ja) | モータ制御ユニットおよびブラシレスモータ | |
| WO2020241027A1 (ja) | 回転電機 | |
| JP6997740B2 (ja) | 回転電機及び回転電機の製造方法 | |
| JP7384709B2 (ja) | 電動パワーステアリング装置および製造方法 | |
| WO2020067255A1 (ja) | モータ | |
| JP4582182B2 (ja) | 電動式パワーステアリング装置 | |
| WO2022153606A1 (ja) | バルブタイミングコントロール機構 | |
| US20110198952A1 (en) | Brushless dc motor | |
| JP2002325392A (ja) | ブラシレスモータとそのターミナル構造 | |
| WO2024069830A1 (ja) | 回転電機およびその製造方法 | |
| JP7561985B2 (ja) | 電動機制御装置 | |
| WO2023007599A1 (ja) | 回路接続装置、回転電機装置、及び回路接続装置の製造方法 | |
| WO2022180660A1 (ja) | 回路接続装置、回転電機装置および回路接続装置の製造方法 | |
| JP7442745B2 (ja) | 回路接続装置、回転電機装置、及び回路接続装置の製造方法 | |
| WO2023281905A1 (ja) | 電子部品及び電子部品の製造方法 | |
| JP7231398B2 (ja) | 回転電機 | |
| JP7076503B2 (ja) | 電動機 | |
| WO2022153975A1 (ja) | ステータ及び回転電機 | |
| JP6969393B2 (ja) | モータ | |
| WO2024084557A1 (ja) | 回転電機 | |
| JP7284578B2 (ja) | サーボモータ | |
| JP2023176291A (ja) | モータ | |
| JP2023007377A (ja) | 電子部品及び電子部品の製造方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 22960892 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2024548942 Country of ref document: JP Kind code of ref document: A |