WO2023120055A1 - 形状測定システム及び形状測定方法 - Google Patents
形状測定システム及び形状測定方法 Download PDFInfo
- Publication number
- WO2023120055A1 WO2023120055A1 PCT/JP2022/043879 JP2022043879W WO2023120055A1 WO 2023120055 A1 WO2023120055 A1 WO 2023120055A1 JP 2022043879 W JP2022043879 W JP 2022043879W WO 2023120055 A1 WO2023120055 A1 WO 2023120055A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- optical fiber
- shape
- core optical
- strain
- strain distribution
- Prior art date
Links
- 238000005259 measurement Methods 0.000 title claims abstract description 27
- 238000000691 measurement method Methods 0.000 title claims description 3
- 239000013307 optical fiber Substances 0.000 claims abstract description 59
- 238000009826 distribution Methods 0.000 claims abstract description 53
- 238000005253 cladding Methods 0.000 claims abstract description 6
- 238000005452 bending Methods 0.000 description 15
- 238000000034 method Methods 0.000 description 9
- 238000000605 extraction Methods 0.000 description 7
- 238000002168 optical frequency-domain reflectometry Methods 0.000 description 6
- 239000000835 fiber Substances 0.000 description 3
- 238000010586 diagram Methods 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- 239000007787 solid Substances 0.000 description 2
- 230000032683 aging Effects 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 239000000470 constituent Substances 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 238000000253 optical time-domain reflectometry Methods 0.000 description 1
- 230000035945 sensitivity Effects 0.000 description 1
- 238000001228 spectrum Methods 0.000 description 1
Images













Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/16—Measuring arrangements characterised by the use of optical techniques for measuring the deformation in a solid, e.g. optical strain gauge
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/16—Measuring arrangements characterised by the use of optical techniques for measuring the deformation in a solid, e.g. optical strain gauge
- G01B11/18—Measuring arrangements characterised by the use of optical techniques for measuring the deformation in a solid, e.g. optical strain gauge using photoelastic elements
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/26—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light
- G01D5/32—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light
- G01D5/34—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells
- G01D5/353—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells influencing the transmission properties of an optical fibre
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/26—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light
- G01D5/32—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light
- G01D5/34—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells
- G01D5/353—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells influencing the transmission properties of an optical fibre
- G01D5/3537—Optical fibre sensor using a particular arrangement of the optical fibre itself
- G01D5/3538—Optical fibre sensor using a particular arrangement of the optical fibre itself using a particular type of fiber, e.g. fibre with several cores, PANDA fiber, fiber with an elliptic core or the like
Definitions
- the present disclosure relates to a technique for deriving the three-dimensional shape of a measurement target based on measurement and analysis of the strain distribution in the light propagation direction of a multi-core optical fiber installed along the measurement target.
- MCF Multi Core Fiber
- OFDR Optical Frequency Domain Reflectometry
- FBG Fiber Bragg Grating
- shape identification can also be performed using semi-distribution measurement such as the addition of FBG (see, for example, Non-Patent Document 2).
- FBG semi-distribution measurement
- this technique has a problem that the number of measurement points is limited and shape identification over a long distance is difficult.
- Non-Patent Document 3 uses BOTDR (Brillouin Optical Time Domain Reflectometry) capable of long-distance measurement over several kilometers to several tens of kilometers.
- BOTDR Bacillouin Optical Time Domain Reflectometry
- a core is required at the center of the clad of the MCF, it is not possible to use a 4-core fiber that has no core at the center of the clad and is used for communication applications.
- Non-Patent Document 3 it is necessary to increase the distance between the central core and the outer core for shape sensing with a small curvature.
- the clad diameter is increased in order to widen the core spacing, there arises a problem that the optical fiber tends to break due to bending.
- the present disclosure aims to make it possible to identify the shape of an object to be measured over a long distance using a multi-core optical fiber that does not have a core in the center of the cladding.
- the shape measurement system of the present disclosure A multi-core optical fiber in which four or more cores are arranged in a portion other than the center of the cross section; a strain distribution measuring device for measuring the strain distribution of each core in the longitudinal direction of the multi-core optical fiber; an analysis device that calculates the shape of the multi-core optical fiber using the strain distribution of the multi-core optical fiber; Prepare.
- the shape measurement method of the present disclosure includes: A strain distribution measuring device measures the strain distribution of each core in the longitudinal direction of the multi-core optical fiber using a multi-core optical fiber in which four or more cores are arranged in a portion other than the center of the cross section, An analysis device calculates the shape of the multi-core optical fiber using the strain distribution of the multi-core optical fiber.
- the present disclosure can make it possible to identify the shape of a measurement target over a long distance using a multi-core optical fiber that does not have a core in the center of the cladding.
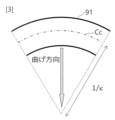
- FIG. 1 shows an example of a system configuration of the present disclosure; 1 shows an example of a flow executed by a system of the present disclosure; FIG. 4 is an explanatory diagram of curvature ⁇ in the present disclosure; FIG. 4 is an explanatory diagram of distance r, angle ⁇ , and bending angle ⁇ in the present disclosure; 4 shows a first extraction example of three-dimensional shape change in the example embodiment of the present disclosure; 4 shows a first extraction example of three-dimensional shape change in the example embodiment of the present disclosure; 4 shows a first extraction example of three-dimensional shape change in the example embodiment of the present disclosure; 4 shows a second example of extraction of three-dimensional shape change in the example embodiment of the present disclosure; 4 shows a second example of extraction of three-dimensional shape change in the example embodiment of the present disclosure; 4 shows a second example of extraction of three-dimensional shape change in the example embodiment of the present disclosure; 4 shows a second example of extraction of three-dimensional shape change in the example embodiment of the present disclosure; An example of the distance r and the amount of strain generated
- 1 shows a cross-sectional configuration example of a full-type optical fiber.
- 1 shows a cross-sectional configuration example of a hollow optical fiber.
- An example of section modulus versus clad diameter is shown.
- 1 illustrates an example of an MCF for use in example embodiments of the present disclosure
- FIG. 1 shows an example of the system configuration of the present disclosure.
- a system that realizes the shape identification method of the present disclosure includes a multi-core optical fiber 91 used for extracting shape changes of the measurement object 100, and a strain distribution measuring device that detects the strain distribution in the propagation direction of each core 11 of the multi-core optical fiber 91. 92 and an analysis device 93 for analyzing measurement data obtained by the strain distribution measurement device 92 .
- the multi-core optical fiber 91 is installed along the longitudinal direction of the object 100 to be measured.
- the multi-core optical fiber 91 has a total of four cores 11 arranged within the clad 12 .
- the four cores 11 are arranged on a square grid at substantially equal intervals on a substantially identical circle at a distance r from the cross-sectional center of the clad 12, in a region other than the cross-sectional center of the clad 12.
- the four cores 11 are arranged on a square grid at substantially equal intervals on a substantially identical circle at a distance r from the cross-sectional center of the clad 12, in a region other than the cross-sectional center of the clad 12.
- a distance r from the cross-sectional center of the clad 12
- the cores 11 provided in the MCF 91 may have a structure in which the refractive index distribution and optical characteristics of each core are intentionally different.
- the embodiment of the present disclosure shows an example in which the number of cores 11 is four, the number of cores 11 may be four or more.
- the intervals between the cores 11 of the MCF 91 may not be equal, but it is preferable that the cores 11 are arranged evenly to some extent in the cross section of the MCF 91 .
- a core may be arranged in each of four quadrants in the rectangular coordinates.
- FIG. 2 shows an example of the implementation flow of the shape identification method of the present disclosure.
- the MCF 91 is laid on the object 100 to be measured, and the strain distribution characteristic of each core 11 in a steady state is acquired using the strain distribution measuring device 92 (step S1). Thereby, the analysis device 93 acquires the strain distribution in the case of the reference shape. Next, with the three-dimensional shape of the object 100 changed, the strain distribution characteristic of each core 11 is acquired again using the strain distribution measuring device 92 (step S2). Thereby, the analysis device 93 acquires the strain distribution for the unknown shape. Next, using the data acquired in step S1 and the data acquired in step S2, the differential strain in step S2 with respect to step S1 is derived at each point of the MCF 91 where the strain distribution measuring device 92 measures the strain (step S3 ). The differential strain ⁇ i calculated in step S3 is the sum of the strain ⁇ b due to bending of the MCF 91 and the axial strain ⁇ a of the MCF 91 in the longitudinal direction.
- FIG. 4 shows specific examples of the distance r, the angle ⁇ and the bending angle ⁇ .
- the angle ⁇ 1 is an angle between a line connecting the central axis CC of the core C1 and the MCF91 and a line connecting the central axis C4 of the core C4 adjacent to the core C1 and the central axis CC of the MCF91.
- the angles ⁇ 1 to ⁇ 4 are 90 degrees because the cores C1 to C4 are arranged on concentric circles at approximately equal intervals.
- a position vector having a magnitude corresponding to the differential strain ⁇ i in the direction corresponding to the curvature ⁇ and the bending angle ⁇ at each point of the strain measured distance z is determined. (Step S4). As a result, it is possible to determine in what direction and how much the multi-core optical fiber 91 is deformed at each point of the distance z, so that the shape of the multi-core optical fiber 91 after deformation can be measured from the steady state.
- the positional accuracy can be improved.
- BOTDR Optical Frequency Domain Reflectometry
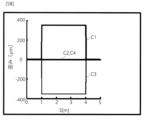
- FIGS. 5A to 5C show examples of extracting three-dimensional shape changes in the embodiment of the present disclosure.
- the strain distribution data in the reference shape in step S1 of FIG. 2 was acquired in a state in which the sensing MCF 91 was linearly stretched.
- the measurement object 100 placed near the center of the MCF 91 is rotated counterclockwise once with a constant curvature on the xy plane, and step S2 is executed.
- strain distribution data for the unknown shape shown in FIG. 5B was acquired.
- the solid lines of C1, C2, C3, and C4 in FIG. 5B represent differences in the core number i.
- 5C shows the results of shape identification by calculating the MCF 91 shape changed from the reference shape based on the strain distribution data in steps S1 and S2. From this result, it can be seen that the bending curvature in the vicinity of the center of the object 100 to be measured can be accurately detected.
- FIGS. 6A to 6C show extraction examples of three-dimensional shape changes in the embodiment of the present disclosure.
- the strain distribution data of the reference shape in step S1 of FIG. 2 was obtained while the sensing MCF 91 was linearly stretched.
- the MCF 91 was deformed from the end of the MCF 91 along the swirling object 100 on the xy plane, and step S2 was executed.
- strain distribution data for the unknown shape shown in FIG. 6B was acquired.
- the solid lines of C1, C2, C3, and C4 in FIG. 6B represent differences in the core number i.
- 6C shows the result of shape identification by calculating the MCF 91 shape changed from the reference shape based on the strain distribution data in steps S1 and S2. From this result, it can be seen that the shape change in which the curvature gradually decreases on the terminal end side of the MCF 91 can be accurately detected.
- FIG. 7 shows an example of strain generated in the core 11 with respect to the distance r.
- the difference in line type in FIG. 7 indicates the difference in curvature, and it can be seen that the farther the core 11 is from the central axis CC of the clad 12, the greater the strain amount, making it easier to extract minute changes. I understand.
- the diameter of the clad 12 In order to widen the distance r between the central axis CC of the clad 12 and the center of the core 11 in the MCF 91, the diameter of the clad 12 must be increased. As the clad diameter increases, the rigidity of the optical fiber increases, the optical fiber itself is less likely to bend, and the possibility of breakage increases. The rigidity of the optical fiber depends on the cross-sectional shape of the optical fiber. In the case of a solid optical fiber in which the entire optical fiber is made of glass as shown in FIG. be.
- the core 11 is not required in the clad center axis CC , so a hollow optical fiber in which the center axis CC of the clad 12 is hollow as shown in FIG. 8B is used. becomes possible.
- the section modulus in that case is represented by Equation (4).
- FIG. 8C shows the section modulus with respect to the diameter of the clad 12 calculated using equations (3) and (4).
- Non-Patent Document 3 shows that it is possible to identify the shape of an MCF having a cladding 12 with a diameter of 375 ⁇ m without breaking. It can be seen that if the hollow area is 80%, even if the diameter of the clad 12 is 430 ⁇ m, the rigidity can be kept to the same level as when the diameter of the clad 12 is 375 ⁇ m. Since the present disclosure can utilize a hollow MCF, it is possible to increase the distance r of the core 11 from the clad central axis CC compared to the solid type shown in FIG. 8A. Therefore, the present disclosure makes it possible to detect minute amounts of strain.
- the system configuration of the shape measurement system of this embodiment differs from the configuration described in FIG. 1 in that the MCF 91 is given a known twist, and the analysis procedure of the analysis device 93 accompanying this is different. Specifically, the shape measuring method of this embodiment differs in the analysis of steps S3 and S4 shown in FIG.
- differential strain ⁇ i obtained by taking the difference between the strain distribution of each core 11 of unknown shape and the strain distribution of each core 11 of reference shape is obtained by bending strain ⁇ b,i and axial strain ⁇ It is represented by the sum of a .
- the differential strain ⁇ i is the sum of the bending strain ⁇ b ,i , the axial strain ⁇ a , and the torsional strain ⁇ t .
- the bending strain ⁇ b,i in Equation (1) is expressed by Equation (5), and each coefficient is expressed by (6) to (9).
- k 1 and k 2 are torsion correction coefficients
- ⁇ i is the angle representing the position of the core number i
- ⁇ is the Poisson's ratio
- p is the spin rate of the core 11 on the circumference
- ⁇ is the specific torsion. Show the corners.
- the spin rate is the number of twists [turns/m] applied to the MCF 91 .
- Curvature ⁇ , bending angle ⁇ , axial strain ⁇ a , and torsional strain ⁇ t that satisfy equations (5) and (10 ) are determined by the method of least squares or the like (step S4).
- a position vector having a size corresponding to the multi-core optical fiber differential strain ⁇ i in the direction corresponding to the curvature ⁇ and the bending angle ⁇ at each point of the distance z where the strain was measured is decide.
- shape identification is made possible using a core arrangement structure without a core in the center of a multi-core optical fiber used for shape change detection.
- OFDR enables shape identification of several kilometers or several tens of kilometers instead of several tens of meters.
- a hollow optical fiber can be used for the MCF 91, by increasing the outer diameter of the MCF and increasing the distance between the cladding center and the core center, strain is increased and the strain is minimized. The measurement sensitivity with which the shape can be measured can be improved.
- the present disclosure can be used for infrastructure aging countermeasures by deriving the three-dimensional shape of the measurement target.
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Length Measuring Devices By Optical Means (AREA)
Abstract
本開示は、クラッドの中心にコアを持たないマルチコア光ファイバを用いて長距離に亘る測定対象の形状同定を実現可能にすることを目的とする。 本開示は、断面の中心以外の部分に4個以上のコアが配置されているマルチコア光ファイバと、前記マルチコア光ファイバの長手方向における各コアの歪分布を計測する歪分布測定装置と、前記マルチコア光ファイバの歪分布を用いて、前記マルチコア光ファイバの形状を算出する解析装置と、を備える形状測定システムである。
Description
本開示は、測定対象に沿って設置したマルチコア光ファイバの光の伝搬方向における歪分布の測定及び解析に基づいて、測定対象の3次元形状を導出する技術に関する。
マルチコア光ファイバ(以下、MCF(Multi Core Fiber)と称する場合がある。)の各コアの周波数領域の反射スペクトルをOFDR(Optical Frequency Domain Reflectometry)で測定し、測定結果を解析することで、測定対象の3次元形状を導出することができる(例えば、非特許文献1及び2参照。)。しかし、OFDRを用いた3次元形状の同定では、数10mmオーダーの高分解能を実現できるが、測定距離が数10m程度に限定される。
センシング媒体の全長にFBG(Fiber Bragg Grating)を付与し、測定分解能を改善する手法が知られている(例えば、非特許文献1参照。)。しかし、センシング媒体の製造性や経済性が低下する問題がある。
一方、FBGの付与など準分布測定を用いて、形状同定を行うこともできる(例えば、非特許文献2参照。)。しかし、この技術では、測定点数に制約があり、長距離にわたる形状同定が困難である問題がある。
また、MCFを用いた形状同定も提案されている(例えば、非特許文献3参照。)。非特許文献3では、数km~数10kmに亘る長距離の測定が可能なBOTDR(Brillouin Optical Time Domain Reflectometry)を用いている。しかし、非特許文献3では、MCFのクラッド中心にコアが必要であるため、通信用途で用いられているクラッド中心にコアがない4コアファイバを用いることはできない。
さらに、非特許文献3では、小さい曲率の形状センシングのためには中心コアと外周コアの距離を大きくする必要がある。しかし、コア間隔を広げるためにクラッド直径を大きくすると、光ファイバの曲げによる破断が生じやすくなる問題が生じる。
https://doi.org/10.1117/12.720914(High-accuracy fiber-optic shape sensing)
DOI:10.1109/TMECH.2010.2080360(Real-Time Estimation of 3-D Needle Shape and Deflection for MRI-Guided Interventions)
小林他、"BOTDRによるマルチコアファイバを用いた大型線状構造体の形状センシングの基礎検討"OFT2020-19,2020.
本開示は、クラッドの中心にコアを持たないマルチコア光ファイバを用いて長距離に亘る測定対象の形状同定を実現可能にすることを目的とする。
具体的には、本開示の形状測定システムは、
断面の中心以外の部分に4個以上のコアが配置されているマルチコア光ファイバと、
前記マルチコア光ファイバの長手方向における各コアの歪分布を計測する歪分布測定装置と、
前記マルチコア光ファイバの歪分布を用いて、前記マルチコア光ファイバの形状を算出する解析装置と、
を備える。
断面の中心以外の部分に4個以上のコアが配置されているマルチコア光ファイバと、
前記マルチコア光ファイバの長手方向における各コアの歪分布を計測する歪分布測定装置と、
前記マルチコア光ファイバの歪分布を用いて、前記マルチコア光ファイバの形状を算出する解析装置と、
を備える。
具体的には、本開示の形状測定方法は、
歪分布測定装置が、断面の中心以外の部分に4個以上のコアが配置されているマルチコア光ファイバを用いて、前記マルチコア光ファイバの長手方向における各コアの歪分布を計測し、
解析装置が、前記マルチコア光ファイバの歪分布を用いて、前記マルチコア光ファイバの形状を算出する。
歪分布測定装置が、断面の中心以外の部分に4個以上のコアが配置されているマルチコア光ファイバを用いて、前記マルチコア光ファイバの長手方向における各コアの歪分布を計測し、
解析装置が、前記マルチコア光ファイバの歪分布を用いて、前記マルチコア光ファイバの形状を算出する。
本開示は、クラッドの中心にコアを持たないマルチコア光ファイバを用いて長距離に亘る測定対象の形状同定を実現可能にすることができる。
以下、本開示の実施形態について、図面を参照しながら詳細に説明する。なお、本開示は、以下に示す実施形態に限定されるものではない。これらの実施の例は例示に過ぎず、本開示は当業者の知識に基づいて種々の変更、改良を施した形態で実施することができる。なお、本明細書及び図面において符号が同じ構成要素は、相互に同一のものを示すものとする。
(実施形態例1)
図1に本開示のシステム構成の一例を示す。
本開示の形状同定法を実現するシステムは、測定対象100の形状変化の抽出に用いるマルチコア光ファイバ91と、前記マルチコア光ファイバ91の各コア11の伝搬方向における歪分布を検出する歪分布測定装置92と、前記歪分布測定装置92で取得された測定データを解析する解析装置93を備える。
図1に本開示のシステム構成の一例を示す。
本開示の形状同定法を実現するシステムは、測定対象100の形状変化の抽出に用いるマルチコア光ファイバ91と、前記マルチコア光ファイバ91の各コア11の伝搬方向における歪分布を検出する歪分布測定装置92と、前記歪分布測定装置92で取得された測定データを解析する解析装置93を備える。
前記マルチコア光ファイバ91は、測定対象100の長手方向に沿って設置される。前記マルチコア光ファイバ91は、クラッド12内に配置された計4個のコア11を有する。図では、実施形態の一例として、4個のコア11は、クラッド12の断面中心以外の領域であって、クラッド12の断面中心から距離rの概ね同一円周上に概ね等間隔の正方格子上に配置されている例を示す。
本開示の実施形態例では、前記4個のコア11は概ね同等の屈折率分布および光学特性を有する例について説明する。ただし、MCF91に備わるコア11は、各コアの屈折率分布や光学特性が意図的に異なるように配置される構造でも構わない。また、本開示の実施形態例ではコア11の数が4である例を示すが、コア11の数が4以上であれば良い。また、MCF91のコア11同士の間隔は、等間隔でなく配置されていても良いが、MCF91の断面においてある程度均等にコア11が配置されていた方が好ましい。例えば、4つのコアの場合には、直交座標における4象限のそれぞれにコアが配置されていてもよい。
本開示の実施形態例のMCF91では、クラッド外径が125μm、コア間のクロストーク低減のためにコア間隔が35μm~45μmに設定されているMCFを用い、MCF91の延伸状態の変化を検出した。また、歪分布測定装置92には、後方ブリルアン散乱光分布を計測するBOTDR装置を用いることとした。図2に本開示の形状同定法の実施フローの一例を示す。
始めに、測定対象100にMCF91を敷設し、歪分布測定装置92を用いて、定常状態における各コア11の歪分布特性を取得する(ステップS1)。これにより、解析装置93は、基準形状であるときの歪分布を取得する。
次に、測定対象100の3次元形状が変化した状態で、歪分布測定装置92を用いて、改めて各コア11の歪分布特性を取得する(ステップS2)。これにより、解析装置93は、未知形状であるときの歪分布を取得する。
次に、ステップS1で取得したデータと、ステップS2で取得したデータを用い、歪分布測定装置92が歪を計測するMCF91の各地点における、ステップS2におけるステップS1に対する差分歪を導出する(ステップS3)。このステップS3で算出した差分歪εiは、MCF91の曲げによる歪εbと、MCF91の長手方向の軸歪εaの和である。
次に、測定対象100の3次元形状が変化した状態で、歪分布測定装置92を用いて、改めて各コア11の歪分布特性を取得する(ステップS2)。これにより、解析装置93は、未知形状であるときの歪分布を取得する。
次に、ステップS1で取得したデータと、ステップS2で取得したデータを用い、歪分布測定装置92が歪を計測するMCF91の各地点における、ステップS2におけるステップS1に対する差分歪を導出する(ステップS3)。このステップS3で算出した差分歪εiは、MCF91の曲げによる歪εbと、MCF91の長手方向の軸歪εaの和である。
図3に示すようにMCF91を曲げた場合、各コアCi(i=1~4)における、曲げ歪εb,iと曲率κと曲げ角度βは関係式(1)により表される。
εb,i=r・κ・cos(αi-β) (1)
尚、rはクラッド12の中心軸CCからコア11までの距離、αiはコア11のMCF91の断面内における角度を表す。
εb,i=r・κ・cos(αi-β) (1)
尚、rはクラッド12の中心軸CCからコア11までの距離、αiはコア11のMCF91の断面内における角度を表す。
図4に、距離r、角度α及び曲げ角度βの具体例を示す。角度α1は、コアC1とMCF91の中心軸CCを結ぶ線とコアC1に隣接するコアC4とMCF91の中心軸CCを結ぶ線とのなす角度である。本実施形態では、コアC1~C4が同心円上に概ね等間隔で配置されているため、角度α1~α4は90度である。
ここで、軸歪εaは、MCF91の断面に対して一様に発生するため、コア番号iによらず一定となる。したがって、ステップS3で算出したコア番号iにおける差分歪εiは式(2)で表される。
εi=εa+εb,i (2)
εi=εa+εb,i (2)
本実施形態では、コア11が4つあるので、4元連立方程式が得られる。また、軸歪εa、曲げ歪における曲率κ、曲げ角度βはいずれのコア11においても等しい。そこで、最小二乗法などを用いて、各コア11の差分歪εiを求める。(ステップS3)
最後に、フレネ・セレの積分公式を用い、歪を計測した距離zの各地点における曲率κと曲げ角度βに対応する方向への、差分歪εiに応じた大きさの位置ベクトルを決定する(ステップS4)。これにより、マルチコア光ファイバ91の距離zの各地点においてどの方向にどの程度変形しているかを求めることができるため、定常状態から変形後のマルチコア光ファイバ91の形状を測定することができる。
尚、マルチコア光ファイバ91の距離zにおける被測定区間の始点と終点を補正することにより、位置精度を向上することができる。また、本実施形態例では歪分布測定にBOTDRを用いたが、OFDR(Optical Frequency Domain Reflectometry)などの光ファイバの歪を計測可能な任意の手段を使用しても良い。
図5A~図5Cに、本開示の実施形態例における3次元形状変化の抽出例を示す。本開示の実施形態例では、センシング用のMCF91を直線状に延伸した状態で、前記図2のステップS1における基準形状であるときの歪分布データを取得した。次に、図5AのようにMCF91の中央付近に配置された測定対象100の周囲を反時計回りに一定曲率でxy平面上で1巻し、ステップS2を実行した。これにより、図5Bの未知形状であるときの歪分布データを取得した。図5B中のC1、C2、C3、C4の実線は、それぞれコア番号iの違いを表す。図5Cは、ステップS1及びS2の歪分布データをもとに、基準形状から変化したMCF91形状を算出し、形状同定した結果を示している。本結果から測定対象100の中央付近における曲げの曲率が精度良く検出できていることが分かる。
図6A~図6Cに、本開示の実施形態例における3次元形状変化の抽出例を示す。図5A~図5Cの場合と同様に、センシング用のMCF91を直線状に延伸した状態で、前記図2のステップS1における基準形状であるときの歪分布データを取得した。次に、図6AのようにMCF91の終端から、xy平面上で渦を巻くような測定対象100に沿って変形させ、ステップS2を実行した。これにより、図6Bの未知形状であるときの歪分布データを取得した。図6B中のC1、C2、C3、C4の実線は、それぞれコア番号iの違いを表す。図6Cは、ステップS1及びS2の歪分布データをもとに、基準形状から変化したMCF91形状を算出し、形状同定した結果を示している。本結果から、MCF91の終端側で曲率が徐々に小さくなる形状変化が精度良く検出できていることが分かる。
(実施形態例2)
図7は距離rに対するコア11に生じる歪量の一例を示している。図7中の線種の違いは曲率の違いを示しており、コア11がクラッド12の中心軸CCから距離rが遠くなるほど、歪量が大きくなり、微小な変化を抽出しやすくなることが分かる。MCF91において、クラッド12の中心軸CCとコア11の中心との距離rを広くするためには、クラッド12の直径を大きくする必要がある。クラッド直径を大きくしていくと、光ファイバの剛性が高くなり、光ファイバ自身が曲がりにくく、破断の可能性も高くなる。この光ファイバの剛性については、光ファイバの断面形状に依存しており、図8Aに示すような光ファイバ全体がガラスである充実型の光ファイバの場合、断面係数は式(3)で表される。

図7は距離rに対するコア11に生じる歪量の一例を示している。図7中の線種の違いは曲率の違いを示しており、コア11がクラッド12の中心軸CCから距離rが遠くなるほど、歪量が大きくなり、微小な変化を抽出しやすくなることが分かる。MCF91において、クラッド12の中心軸CCとコア11の中心との距離rを広くするためには、クラッド12の直径を大きくする必要がある。クラッド直径を大きくしていくと、光ファイバの剛性が高くなり、光ファイバ自身が曲がりにくく、破断の可能性も高くなる。この光ファイバの剛性については、光ファイバの断面形状に依存しており、図8Aに示すような光ファイバ全体がガラスである充実型の光ファイバの場合、断面係数は式(3)で表される。
一方、本開示を用いた場合には、クラッド中心軸CCにコア11が不要となることから、図8Bに示すようなクラッド12の中心軸CCを中空にした中空型の光ファイバにすることが可能になる。その場合の断面係数は式(4)で表される。

式(3)及び式(4)を用いて算出したクラッド12の直径に対する断面係数を図8Cに示す。非特許文献3には、クラッド12の直径が375μmのMCFでは破断することなく形状同定を行うことが可能であることが示されている。中空の面積を80%にすれば、クラッド12の直径が430μmであっても、クラッド12の直径が375μmと同程度の剛性に留めることができることがわかる。本開示は、中空のMCFを利用することが可能であるため、図8Aに示す充実型と比較してクラッド中心軸CCからコア11の距離rを大きくすることができる。したがって、本開示は、微小な歪量を検出することが可能になる。
(実施形態例3)
MCF91を用いて3次元の形状変化を抽出する際に、意図しない捩じりが生じ、計測結果に誤差が生じる可能性がある。そこで、本実施形態では、図9に示すように、形状同定に用いるMCFを作製する際に、意図的に単位長さあたりに一定の回数の捩じりを加える。ここで、図では、理解が容易になるよう、コア数が3の場合を示している。これにより、本実施形態のMCF91は、予め加えられている捩じり回数以下の意図しない捩じりが与えられた場合に、後から与えられた意図しない捩じりを推定することができる。このため、意図しない捩じりによる歪を排除することが可能になり、形状同定の精度を向上させることができる。
MCF91を用いて3次元の形状変化を抽出する際に、意図しない捩じりが生じ、計測結果に誤差が生じる可能性がある。そこで、本実施形態では、図9に示すように、形状同定に用いるMCFを作製する際に、意図的に単位長さあたりに一定の回数の捩じりを加える。ここで、図では、理解が容易になるよう、コア数が3の場合を示している。これにより、本実施形態のMCF91は、予め加えられている捩じり回数以下の意図しない捩じりが与えられた場合に、後から与えられた意図しない捩じりを推定することができる。このため、意図しない捩じりによる歪を排除することが可能になり、形状同定の精度を向上させることができる。
本実施形態の形状測定システムのシステム構成は図1で説明した構成に対し、MCF91に既知の捩じれが付与されていることに加え、これに伴う解析装置93の解析手順が相違する。具体的には、本実施形態の形状測定方法は、図2に示したステップS3及びS4の解析が異なる。
図2のステップS3では、未知形状の各コア11の歪分布と基準形状の各コア11の歪分布との差分をとることにより得られる差分歪εiは曲げ歪εb,iと軸歪εaの和で表されている。本実施形態では、MCF91に捩じりを加えられているため、差分歪εiは、曲げ歪εb,iと軸歪εaと捩じり歪εtの和になる。また、式(1)の曲げ歪εb,iは式(5)で表され、各係数は(6)から(9)で表される。

k1、k2は捩じりの補正係数であり、ωiはコア番号iの位置を表す角度、νはポアソン比、pは円周上のコア11のスピンレート、φは比捩じり角を示す。ここで、スピンレートは、MCF91に加えた捩じり回数[回/m]である。
コア11同士の相対的な位置関係は変化しないので、εb,iの総和はゼロになる。したがって、差分歪εiの総和は式(10)になる。

式(5)及び式(10)を満たす曲率κ、曲げ角度β、軸歪εa、捩じり歪εtを最小二乗法などにより決定する(ステップS4)。最後にフレネ・セレの積分公式を用い、歪を計測した距離zの各地点における曲率κと曲げ角度βに対応する方向への、マルチコア光ファイバ差分歪εiに応じた大きさの位置ベクトルを決定する。これにより、マルチコア光ファイバ91の距離zの各地点においてどの方向にどの程度変形しているかを求めることができるため、定常状態から変形後のマルチコア光ファイバ91の形状を測定することができる。
(本開示の効果)
本開示によれば、形状変化の検出に用いるマルチコア光ファイバの中心にコアがないコア配置の構造を用いて形状同定を可能にする。また、OFDRでは数十mだったものが、数kmか数10kmの形状同定が可能になる。さらに、本開示によれば、MCF91に中空型の光ファイバを用いることができるため、MCFの外径を太くしてクラッド中心とコア中心間距離を拡大することにより、歪を大きくして微小な形状を測定可能な測定感度を向上することができる。
本開示によれば、形状変化の検出に用いるマルチコア光ファイバの中心にコアがないコア配置の構造を用いて形状同定を可能にする。また、OFDRでは数十mだったものが、数kmか数10kmの形状同定が可能になる。さらに、本開示によれば、MCF91に中空型の光ファイバを用いることができるため、MCFの外径を太くしてクラッド中心とコア中心間距離を拡大することにより、歪を大きくして微小な形状を測定可能な測定感度を向上することができる。
本開示は測定対象の3次元形状を導出することによるインフラの老朽化対策に利用することができる。
11:コア
12:クラッド
91:マルチコア光ファイバ
92:歪分布測定装置
93:解析装置
100:測定対象
12:クラッド
91:マルチコア光ファイバ
92:歪分布測定装置
93:解析装置
100:測定対象
Claims (8)
- 断面の中心以外の部分に4個以上のコアが配置されているマルチコア光ファイバと、
前記マルチコア光ファイバの長手方向における各コアの歪分布を計測する歪分布測定装置と、
前記マルチコア光ファイバの歪分布を用いて、前記マルチコア光ファイバの形状を算出する解析装置と、
を備える形状測定システム。 - 前記歪分布測定装置は、前記マルチコア光ファイバが基準形状であるときの前記歪分布を予め測定し、
前記解析装置は、前記歪分布測定装置で測定された歪分布を前記基準形状であるときの歪分布と比較することで、前記基準形状から変化した前記マルチコア光ファイバの形状を算出する、
請求項1に記載の形状測定システム。 - 前記解析装置は、前記歪分布測定装置で測定された歪分布と前記基準形状であるときの歪分布を用いて、差分歪を求め、
前記差分歪を用いて、前記歪分布測定装置が歪を計測する前記マルチコア光ファイバの各地点での位置ベクトルを算出し、
前記位置ベクトルを用いて、3次元空間における前記マルチコア光ファイバの形状を測定する、
請求項2に記載の形状測定システム。 - 前記マルチコア光ファイバは、既知の捩じりが与えられており、
前記解析装置は、前記既知の捩じりによる歪に基づいて、前記マルチコア光ファイバの形状の変化に起因する意図しない捩じりの歪を推定し、推定した前記意図しない捩じりによる歪を、前記マルチコア光ファイバの歪分布から除外すること、
を特徴とする請求項1に記載の形状測定システム。 - 前記マルチコア光ファイバは、
125μmのクラッド直径を有し、
35μm以上45μm以下の間隔で正方格子上に配置されているコアを有すること、を特徴とする請求項1に記載の形状測定システム。 - 前記マルチコア光ファイバの中心軸が中空であることを特徴とする請求項1に記載の形状測定システム。
- 前記歪分布測定装置が、前記マルチコア光ファイバで発生した後方ブリルアン散乱光分布を計測することを特徴とする請求項1に記載の形状測定システム。
- 歪分布測定装置が、断面の中心以外の部分に4個以上のコアが配置されているマルチコア光ファイバを用いて、前記マルチコア光ファイバの長手方向における各コアの歪分布を計測し、
解析装置が、前記マルチコア光ファイバの歪分布を用いて、前記マルチコア光ファイバの形状を算出する、
形状測定方法。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP22910773.5A EP4455617A1 (en) | 2021-12-24 | 2022-11-29 | Shape measurement system and shape measurement method |
| JP2023569212A JPWO2023120055A1 (ja) | 2021-12-24 | 2022-11-29 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021-210127 | 2021-12-24 | ||
| JP2021210127 | 2021-12-24 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2023120055A1 true WO2023120055A1 (ja) | 2023-06-29 |
Family
ID=86902308
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2022/043879 WO2023120055A1 (ja) | 2021-12-24 | 2022-11-29 | 形状測定システム及び形状測定方法 |
Country Status (3)
| Country | Link |
|---|---|
| EP (1) | EP4455617A1 (ja) |
| JP (1) | JPWO2023120055A1 (ja) |
| WO (1) | WO2023120055A1 (ja) |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002185063A (ja) * | 2000-12-14 | 2002-06-28 | Hitachi Cable Ltd | 希土類元素添加光ファイバ及びそれを用いた光デバイス |
| US20180109067A1 (en) * | 2016-05-25 | 2018-04-19 | Nec Laboratories America, Inc. | 3d waveguide for efficient coupling of multimode pump and signals to a multicore fiber amplifier |
| JP2018536162A (ja) * | 2015-11-19 | 2018-12-06 | コーニング インコーポレイテッド | マルチコアファイバを使用する分布型ファイバセンサおよびシステム |
| WO2021246497A1 (ja) * | 2020-06-05 | 2021-12-09 | 日本電信電話株式会社 | 形状測定システム及び形状測定方法 |
| WO2022097466A1 (ja) * | 2020-11-05 | 2022-05-12 | 日本電信電話株式会社 | 線状構造物の挙動を算出する装置及び方法 |
-
2022
- 2022-11-29 WO PCT/JP2022/043879 patent/WO2023120055A1/ja active Application Filing
- 2022-11-29 EP EP22910773.5A patent/EP4455617A1/en active Pending
- 2022-11-29 JP JP2023569212A patent/JPWO2023120055A1/ja active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002185063A (ja) * | 2000-12-14 | 2002-06-28 | Hitachi Cable Ltd | 希土類元素添加光ファイバ及びそれを用いた光デバイス |
| JP2018536162A (ja) * | 2015-11-19 | 2018-12-06 | コーニング インコーポレイテッド | マルチコアファイバを使用する分布型ファイバセンサおよびシステム |
| US20180109067A1 (en) * | 2016-05-25 | 2018-04-19 | Nec Laboratories America, Inc. | 3d waveguide for efficient coupling of multimode pump and signals to a multicore fiber amplifier |
| WO2021246497A1 (ja) * | 2020-06-05 | 2021-12-09 | 日本電信電話株式会社 | 形状測定システム及び形状測定方法 |
| WO2022097466A1 (ja) * | 2020-11-05 | 2022-05-12 | 日本電信電話株式会社 | 線状構造物の挙動を算出する装置及び方法 |
Non-Patent Citations (1)
| Title |
|---|
| KOBAYASHI ET AL.: "Basic Study of Shape Sensing for Large-Scale Line Structures with Multi-Core Fibers by Brillouin OTDR", OFT 2020-19, 2020 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP4455617A1 (en) | 2024-10-30 |
| JPWO2023120055A1 (ja) | 2023-06-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN107003473B (zh) | 用于应变和温度分离的多芯光纤中的不同的纤芯 | |
| JP7518243B2 (ja) | 安全性のためのマルチコア光ファイバ内の冗長コア | |
| JP7376052B2 (ja) | 形状測定システム及び形状測定方法 | |
| JP5512462B2 (ja) | 光ファイバおよび光ファイバ線路の曲げ損失の長手方向分布の測定方法、光線路の試験方法および光ファイバの製造方法 | |
| CN103162938B (zh) | 用于表征光纤的光学性质的方法 | |
| US20070286561A1 (en) | Multi-core distributed temperature sensing fiber | |
| JP6346852B2 (ja) | 光ファイバの曲げ形状測定装置及びその曲げ形状測定方法 | |
| CN108317965A (zh) | 一种具有光纤光栅的测量形变结构和方法 | |
| CN110887448B (zh) | 一种基于光纤应变测量的梁结构形态重构方法 | |
| Duncan et al. | Characterization of a fiber-optic shape and position sensor | |
| JP6346851B2 (ja) | 光ファイバの曲げ形状測定装置及びその曲げ形状測定方法 | |
| JP2022502631A (ja) | 光学形状感知システム及び方法 | |
| Idrisov et al. | Characterization and calibration of shape sensors based on multicore optical fibre | |
| WO2023120055A1 (ja) | 形状測定システム及び形状測定方法 | |
| JP6283602B2 (ja) | 光ファイバの曲げ形状測定装置及びその曲げ形状測定方法 | |
| WO2021044511A1 (ja) | 光ファイバケーブルセンシング装置、光ファイバケーブルセンシング方法、及びプログラム | |
| CN117168518A (zh) | 基于包层波导耦合的多芯光纤光栅矢量弯曲和加速度传感器 | |
| Askins et al. | Bend and twist sensing in a multi-core optical fiber | |
| JP7406767B2 (ja) | 光ファイバケーブルセンシングシステム、光ファイバケーブルセンシング方法、及び光ファイバケーブル | |
| JP7306565B2 (ja) | テープ心線を用いた測定装置及び測定方法 | |
| JP7406768B2 (ja) | 光ファイバケーブルセンシング装置、光ファイバケーブルセンシング方法、及びプログラム | |
| CN202547682U (zh) | 布里渊光时域解调仪的空间分辨率标定装置 | |
| WO2024228359A1 (ja) | 検出システム、検出方法、及び、解析装置 | |
| JP7523071B2 (ja) | 光ファイバ撚り周期算出システム、光ファイバ撚り周期算出方法、光ファイバ撚り周期算出装置及び光ファイバ撚り周期算出プログラム | |
| JP7542807B2 (ja) | 光ファイバ曲げ方向算出システム、光ファイバ曲げ方向算出方法、光ファイバ曲げ方向算出装置及び光ファイバ曲げ方向算出プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 22910773 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2023569212 Country of ref document: JP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2022910773 Country of ref document: EP Effective date: 20240724 |