WO2023067898A1 - 作業機械、及び、作業機械を制御するための方法 - Google Patents
作業機械、及び、作業機械を制御するための方法 Download PDFInfo
- Publication number
- WO2023067898A1 WO2023067898A1 PCT/JP2022/032445 JP2022032445W WO2023067898A1 WO 2023067898 A1 WO2023067898 A1 WO 2023067898A1 JP 2022032445 W JP2022032445 W JP 2022032445W WO 2023067898 A1 WO2023067898 A1 WO 2023067898A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- vehicle body
- work machine
- height
- working machine
- work
- Prior art date
Links
- 238000000034 method Methods 0.000 title claims description 15
- 230000005484 gravity Effects 0.000 claims abstract description 18
- 230000008859 change Effects 0.000 description 10
- 230000005540 biological transmission Effects 0.000 description 8
- 230000008602 contraction Effects 0.000 description 3
- 230000004044 response Effects 0.000 description 3
- 238000002485 combustion reaction Methods 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 239000010720 hydraulic oil Substances 0.000 description 2
- 238000005259 measurement Methods 0.000 description 2
- 230000009471 action Effects 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 239000012530 fluid Substances 0.000 description 1
- 230000009347 mechanical transmission Effects 0.000 description 1
- 230000015654 memory Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
Images











Classifications
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/76—Graders, bulldozers, or the like with scraper plates or ploughshare-like elements; Levelling scarifying devices
- E02F3/80—Component parts
- E02F3/84—Drives or control devices therefor, e.g. hydraulic drive systems
- E02F3/841—Devices for controlling and guiding the whole machine, e.g. by feeler elements and reference lines placed exteriorly of the machine
Abstract
コントローラは、車体姿勢データを取得する。コントローラは、作業機姿勢データを取得する。コントローラは、車体姿勢データと、作業機姿勢データとに基づいて、車体の基準点からの重力方向における作業機の高さを算出する。コントローラは、車体の姿勢が変化しても、重力方向における作業機の高さを維持するように、アクチュエータを制御する。
Description
本発明は、作業機械、及び、作業機械を制御するための方法に関する。
作業機械は、車体と、作業機と、アクチュエータとを備えている。アクチュエータは、例えば油圧シリンダである。アクチュエータは、オペレータの操作に応じて駆動されることで、作業機を動作させる。例えば、モータグレーダは、作業機として、ブレードを備えている。モータグレーダは、車体として、タンデムドライブとフレームとを備えている。ブレードは、フレームに支持されている。フレームは、前輪を回転可能に支持している。タンデムドライブは後輪を支持している。オペレータは、作業機の操作レバーを操作することで、ブレードを上下に動作させる。
上述したモータグレーダでは、前輪が起伏を乗り越えるときに、フレームの姿勢が変化することで、ブレードの高さが変化してしまう。この問題に対応する技術が特許文献1に開示されている。特許文献1においては、コントローラは、フレームとタンデムドライブとの相対回転角からブレードの高さの変化を算出する。コントローラは、ブレードの高さの変化に応じて、ブレードを上下に移動させる。それにより、ブレードが所定の高さに保持される。
しかしながら、特許文献1のモータグレーダでは、タンデムドライブを含んだ車体全体の姿勢が変化した場合には、車体に対するブレードの高さ方向も変化してしまう。例えば、タンデムドライブが水平面から傾斜したときには、コントローラが算出したブレードの高さは、実際のブレードの高さとは異なる値を取る。そのため、ブレードを地面に対して所定の高さに精度よく保持することは困難である。本発明は、作業機械が起伏のある地面を走行するときであっても、作業機を目標高さに精度よく保持することにある。
本発明の一態様は、作業機械であって、車体と、作業機と、アクチュエータと、車体センサと、作業機センサと、コントローラとを備える。作業機は、車体に対して動作可能に支持される。アクチュエータは、作業機に接続される。アクチュエータは、作業機を動作させる。車体センサは、車体の姿勢を示す車体姿勢データを検出する。作業機センサは、作業機の姿勢を示す作業機姿勢データを検出する。
コントローラは、車体姿勢データを取得する。コントローラは、作業機姿勢データを取得する。コントローラは、車体姿勢データと、作業機姿勢データとに基づいて、車体の基準点からの重力方向における作業機の高さを算出する。コントローラは、車体の姿勢が変化しても、重力方向における作業機の高さを維持するように、アクチュエータを制御する。
本発明の他の態様は、作業機械を制御するための方法であって、作業機械は、車体と、作業機と、アクチュエータとを備える。作業機は、車体に対して動作可能に支持される。アクチュエータは、作業機に接続される。アクチュエータは、作業機を動作させる。
当該方法は、車体の姿勢を示す車体姿勢データを取得することと、作業機の姿勢を示す作業機姿勢データを取得することと、車体姿勢データと、作業機姿勢データとに基づいて、車体の基準点からの重力方向における作業機の高さを算出することと、車体の姿勢が変化しても、重力方向における作業機の高さを維持するように、アクチュエータを制御すること、を備える。
本発明によれば、車体の姿勢が変化しても、重力方向における作業機の高さが維持される。そのため、作業機械が起伏のある地面を走行するときであっても、作業機の高さが精度よく維持される。
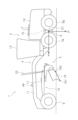
以下、図面を参照して、本発明の実施形態について説明する。図1は、実施形態に係る作業機械1の側面図である。図2は、作業機械1の前部の斜視図である。本実施形態における作業機械1は、モータグレーダである。図1に示すように、作業機械1は、車体2と作業機3とを備える。作業機3は、車体2に対して動作可能に支持される。車体2は、車体フレーム4と、タンデムドライブ5と、前輪6と、後輪7A,7Bとを含む。
車体フレーム4は、前輪6と作業機3とを支持する。車体フレーム4は、フロントフレーム11とリアフレーム12とを含む。リアフレーム12は、フロントフレーム11に接続されている。フロントフレーム11は、リアフレーム12に対して、左右にアーティキュレート可能である。なお、以下の説明において、前後左右の各方向は、アーティキュレート角が0、すなわち、フロントフレーム11とリアフレーム12とが真っすぐな状態での車体2の前後左右の各方向を意味するものとする。
リアフレーム12上には、キャブ13と動力室14とが配置されている。キャブ13には、図示しない運転席が配置されている。動力室14には、後述する駆動系が配置されている。フロントフレーム11は、リアフレーム12から前方へ延びている。前輪6は、フロントフレーム11に取り付けられている。
タンデムドライブ5は、リアフレーム12に接続されている。タンデムドライブ5は、後輪7A,7Bを支持すると共に、後輪7A,7Bを駆動する。タンデムドライブ5は、左右方向に延びる後軸10を含む。タンデムドライブ5は、車体フレーム4のリアフレーム12を後軸10回りに揺動可能に支持する。前輪6が作業機3によって整地されていない路面の起伏によって上下動するとき、車体フレーム4は後軸10回りに揺動する(図9を参照)。
後輪7A,7Bは、一対の第1後輪7Aと、一対の第2後輪7Bとを含む。なお、図1では、左側の第1後輪7Aと、左側の第2後輪7Bのみが図示されている。第2後輪7Bは、第1後輪7Aの後方に配置されている。後軸10は、第1後輪7Aと第2後輪7Bとの間に配置されている。後軸10は、タンデムドライブ5に対する車体フレーム4の揺動中心となる。
作業機3は、車体2に対して可動的に接続されている。作業機3は、支持部材15とブレード16とを含む。支持部材15は、車体2に可動的に接続されている。支持部材15は、ブレード16を支持している。支持部材15は、ドローバ17とサークル18とを含む。ドローバ17とサークル18とは、フロントフレーム11の下方に配置される。
図2に示すように、ドローバ17は、フロントフレーム11の軸支部19に接続されている。軸支部19は、フロントフレーム11の前部に配置されている。ドローバ17は、フロントフレーム11の前部から後方へ延びている。ドローバ17は、フロントフレーム11に対して、少なくとも車体2の上下方向と左右方向とに揺動可能に支持されている。例えば、軸支部19は、ボールジョイントを含む。ドローバ17は、ボールジョイントを介して、フロントフレーム11に対して回転可能に接続されている。
サークル18は、ドローバ17の後部に接続されている。サークル18は、ドローバ17に対して回転可能に支持される。ブレード16は、サークル18に接続される。ブレード16は、サークル18を介して、ドローバ17に支持されている。ブレード16は、チルト軸21回りに回転可能にサークル18に支持されている。チルト軸21は、左右方向に延びている。ブレード16は、左右方向にスライド可能にサークル18に支持されている。
作業機械1は、作業機3の姿勢を変更するための複数のアクチュエータ22-27を備えている。複数のアクチュエータ22-27は、複数の油圧シリンダ22-26を含む。複数の油圧シリンダ22-26は、作業機3に接続されている。複数の油圧シリンダ22-26は、油圧によって伸縮する。複数の油圧シリンダ22-26は、伸縮することで、車体2に対する作業機3の姿勢を変更する。以下の説明では、油圧シリンダの伸縮を「ストローク動作」と呼ぶ。
詳細には、複数の油圧シリンダ22-26は、左リフトシリンダ22と、右リフトシリンダ23と、ドローバシフトシリンダ24と、ブレードチルトシリンダ25と、ブレードシフトシリンダ26とを含む。左リフトシリンダ22と右リフトシリンダ23とは、左右方向に互いに離れて配置されている。左リフトシリンダ22は、ドローバ17の左部分に接続されている。右リフトシリンダ23は、ドローバ17の右部分に接続されている。左リフトシリンダ22と右リフトシリンダ23とは、ドローバ17に対して左右に揺動可能に接続されている。
左リフトシリンダ22と右リフトシリンダ23とは、フロントフレーム11に対して、左右に揺動可能に接続されている。詳細には、左リフトシリンダ22と右リフトシリンダ23とは、リフタブラケット29を介して、フロントフレーム11に接続されている。リフタブラケット29は、フロントフレーム11に接続されている。リフタブラケット29は、左リフトシリンダ22と右リフトシリンダ23とを左右に揺動可能に支持している。左リフトシリンダ22と右リフトシリンダ23とのストローク動作により、ドローバ17は、軸支部19回りに上下に揺動する。それにより、ブレード16が上下に移動する。
ドローバシフトシリンダ24は、ドローバ17とフロントフレーム11とに接続されている。ドローバシフトシリンダ24は、リフタブラケット29を介してフロントフレーム11に接続されている。ドローバシフトシリンダ24は、フロントフレーム11に対して、揺動可能に接続されている。ドローバシフトシリンダ24は、ドローバ17に対して、揺動可能に接続されている。ドローバシフトシリンダ24は、フロントフレーム11からドローバ17に向かって、斜め下方に延びている。ドローバシフトシリンダ24は、フロントフレーム11の左右の一側方から反対の側方へ向かって延びている。ドローバシフトシリンダ24のストローク動作により、ドローバ17は、軸支部19回りに左右に揺動する。
図1に示すように、ブレードチルトシリンダ25は、サークル18とブレード16とに接続されている。ブレードチルトシリンダ25のストローク動作により、ブレード16がチルト軸21回りに回転する。図2に示すように、ブレードシフトシリンダ26は、サークル18とブレード16とに接続されている。ブレードシフトシリンダ26のストローク動作により、ブレード16がサークル18に対して左右にスライドする。
複数のアクチュエータ22-27は、回転アクチュエータ27を含む。回転アクチュエータ27は、ドローバ17とサークル18とに接続されている。回転アクチュエータ27は、ドローバ17に対してサークル18を回転させる。それにより、ブレード16が、上下方向に延びる回転軸回りに回転する。
図3は、作業機械1の駆動系8及び制御系9を示す模式図である。図3に示すように、作業機械1は、駆動源31と、油圧ポンプ32と、動力伝達装置33と、制御弁34とを備えている。駆動源31は、例えば内燃機関である。或いは、駆動源31は、電動モータ、或いは内燃機関と電動モータとのハイブリッドであってもよい。油圧ポンプ32は、駆動源31によって駆動されることで、作動油を吐出する。
制御弁34は、油圧回路を介して油圧ポンプ32と複数の油圧シリンダ22-26とに接続されている。制御弁34は、複数の油圧シリンダ22-26にそれぞれ接続される複数の弁を含む。制御弁34は、油圧ポンプ32から複数の油圧シリンダ22-26に供給される作動油の流量を制御する。
本実施形態では、回転アクチュエータ27は、油圧モータである。制御弁34は、油圧回路を介して油圧ポンプ32と回転アクチュエータ27とに接続されている。制御弁34は、油圧ポンプ32から回転アクチュエータ27に供給される作動油の流量を制御する。なお、回転アクチュエータ27は、電動モータであってもよい。
動力伝達装置33は、駆動源31からの駆動力を後輪7A,7Bに伝達する。動力伝達装置33は、トルクコンバータ、及び/又は、複数の変速ギアを含んでもよい。或いは、動力伝達装置33は、HST(Hydraulic Static Transmission)、或いは、HMT(Hydraulic Mechanical Transmission)などのトランスミッションであってもよい。
図3に示すように、作業機械1は、操作装置35とコントローラ36とを備えている。操作装置35は、作業機3の姿勢を変更するためにオペレータによって操作可能である。作業機3の姿勢は、車体2に対するブレード16の位置と向きとを示す。図4は、作業機3の姿勢を示す作業機械1の模式的な背面図である。図4に示すように、操作装置35の操作に応じて、ブレード16の左端部161の高さと、右端部162の高さとが変更される。
操作装置35の操作に応じて、ドローバ17のヨー角θ1と、ピッチ角θ2と、ロール角θ3とが変更される。図5は、作業機3の姿勢を示す作業機械1の模式的な平面図である。図5に示すように、ドローバ17のヨー角θ1は、車体2の前後方向に対するドローバ17の左右方向の傾斜角度である。なお、ドローバ17のヨー角θ1は、フロントフレーム11の前後方向に対するドローバ17の左右方向の傾斜角度であってもよい。ブレード16の左右方向における位置は、ドローバ17のヨー角θ1に応じて変化する。
図6は、作業機3の姿勢を示す作業機械1の模式的な側面図である。図6に示すように、ドローバ17のピッチ角θ2は、車体2の前後方向に対するドローバ17の上下方向の傾斜角度である。図4に示すように、ドローバ17のロール角θ3は、車体2の前後方向に延びるロール軸A1回りのドローバ17の傾斜角度である。
また、操作装置35の操作に応じて、サークル18の回転角θ4と、ブレード16のチルト角θ5と、ブレード16のシフト量W1とが変更される。図7は、作業機3の姿勢を示す作業機械1の模式的な平面図である。図7に示すように、サークル18の回転角θ4は、車体2の前後方向に対するサークル18の回転角θ4である。図6に示すように、ブレード16のチルト角θ5は、左右方向に延びるチルト軸21回りのブレード16の傾斜角である。図8は、作業機3の姿勢を示す作業機械1の模式的な平面図である。図8に示すように、ブレード16のシフト量W1は、サークル18に対するブレード16の左右方向へのスライド量である。
操作装置35は、複数の操作部材41-46を含む。複数の操作部材41-46は、左リフトシリンダ22と、右リフトシリンダ23と、ドローバシフトシリンダ24と、ブレードチルトシリンダ25と、ブレードシフトシリンダ26と、回転アクチュエータ27とのそれぞれに対応して設けられている。
複数の操作部材41-46は、左リフトレバー41と、右リフトレバー42と、ドローバシフトレバー43と、回転レバー44と、ブレードチルトレバー45と、ブレードシフトレバー46とを含む。左リフトレバー41の操作に応じて、左リフトシリンダ22が伸縮する。右リフトレバー42の操作に応じて、右リフトシリンダ23が伸縮する。
ドローバシフトレバー43の操作に応じて、ドローバシフトシリンダ24が伸縮する。回転レバー44の操作に応じて、回転アクチュエータ27が回転する。ブレードチルトレバー45の操作に応じて、ブレードチルトシリンダ25が伸縮する。ブレードシフトレバー46の操作に応じて、ブレードシフトシリンダ26が伸縮する。複数の操作部材41-46のそれぞれは、オペレータによる各操作部材41-46への操作を示す信号を出力する。
コントローラ36は、駆動源31及び動力伝達装置33を制御することで、作業機械1を走行させる。また、コントローラ36は、油圧ポンプ32と制御弁34とを制御することで、作業機3を動作させる。コントローラ36は、プロセッサ37と記憶装置38とを含む。プロセッサ37は、例えばCPUであり、作業機械1を制御するためのプログラムを実行する。記憶装置38は、RAM及びROMなどのメモリと、SSD或いはHDDなどの補助記憶装置を含む。記憶装置38は、作業機械1を制御するためのプログラムとデータとを記憶している。
図3に示すように、作業機械1は、上述した作業機3の姿勢を検出するための作業機センサ48を含む。作業機センサ48は、複数のセンサS1-S8を含む。複数のセンサS1-S8は、例えば磁気センサである。ただし、複数のセンサS1-S8は、光学センサなどの他の方式のセンサであってもよい。複数のセンサS1-S5は、上述した複数の油圧シリンダ22-26のストローク長を検出する。複数のセンサS1-S5は、左リフトセンサS1と、右リフトセンサS2と、ドローバシフトセンサS3と、ブレードチルトセンサS4と、ブレードシフトセンサS5とを含む。
左リフトセンサS1は、左リフトシリンダ22のストローク長を検出する。右リフトセンサS2は、右リフトシリンダ23のストローク長を検出する。ドローバシフトセンサS3は、ドローバシフトシリンダ24のストローク長を検出する。ブレードチルトセンサS4は、ブレードチルトシリンダ25のストローク長を検出する。ブレードシフトセンサS5は、ブレードシフトシリンダ26のストローク長を検出する。
複数のセンサS1-S8は、回転センサS6を含む。回転センサS6は、サークル18の回転角θ4を検出する。複数のセンサS1-S8は、検出したストローク長及び回転角θ4を示す信号を出力する。複数のセンサS1-8は、左シリンダ角度センサS7と右シリンダ角度センサS8とを含む。左シリンダ角度センサS7は、リフタブラケット29に対する左リフトシリンダ22の左右方向の揺動角度を検出する。右シリンダ角度センサS8は、リフタブラケット29に対する右リフトシリンダ23の左右方向の揺動角度を検出する。これらセンサS1-S8により、車体2に対するドローバ17の姿勢が検出されると共に、ドローバ17に対するブレード16の姿勢が検出される。すなわち、これらセンサS1-S8により、車体2に対するブレード16の姿勢が検出される。
作業機械1は、車体センサ49を含む。車体センサ49は、例えばIMU(慣性計測装置)である。車体センサ49は、車体2の姿勢を示す車体姿勢データを検出する。車体姿勢データは、車体2のピッチ角とロール角とを含む。なお、車体センサ49はIMUに限定されるものではない。車体センサ49は、車体2のピッチ角とロール角を計測する手段であればよく、例えば傾斜計であってもよい。
車体センサ49は、車体フレーム4に取り付けられている。従って、図9に示すように、車体2のピッチ角θ6は、水平方向に対する車体フレーム4の上下方向の傾斜角度である。図10に示すように、車体2のロール角θ7は、水平方向に対する車体フレーム4の左右方向の傾斜角度である。なお、車体センサ49は、車体フレーム4に限らず、車体フレーム4に対する相対位置が変化しない車体2の他の場所に取り付けられてもよい。例えば、車体センサ49は、タンデムドライブ5やドローバ17等の車体フレーム4に対する相対位置が変化する場所以外の他の場所に配置されてもよい。
コントローラ36は、作業機センサ48からの信号に基づいて、車体2に対する作業機3の姿勢を示す作業機姿勢データを取得する。作業機姿勢データは、上述したブレード16の左端部161の高さと、右端部162の高さと、ドローバ17のヨー角θ1と、ピッチ角θ2と、ロール角θ3と、サークル18の回転角θ4と、ブレード16のチルト角θ5と、ブレード16のシフト量W1とを含む。コントローラ36は、車体センサ49からの信号に基づいて、車体姿勢データを取得する。コントローラ36は、複数の操作部材41-46の操作に応じて、複数のアクチュエータ22-27を制御することで、作業機3の姿勢を変更する。
また、コントローラ36は、上述した車体姿勢データと、作業機姿勢データとに基づいて、作業機3の自動制御を実行する。作業機3の自動制御では、コントローラ36は、作業機3を目標高さに保持するように、左リフトシリンダ22と、右リフトシリンダ23とを制御する。以下、作業機3の自動制御の処理について説明する。図11は、作業機3の自動制御の処理を示すフローチャートである。
図11に示すように、ステップS101では、コントローラ36は、操作装置35の操作があるかを判定する。コントローラ36は、操作装置35の操作入力が一定時間無かった場合に、操作装置35の操作が行われなくなったと判断してもよい。上述した操作部材41-46の少なくとも1つが操作されているときには、コントローラ36は、作業機3の自動制御を実行しない。従って、コントローラ36は、複数の操作部材41-46の操作に応じて、複数のアクチュエータ22-27を制御することで、作業機3の姿勢を変更する。操作部材41-46が操作されていないときには、処理はステップS102に進む。
ステップS102では、コントローラ36は、車体2の現在の姿勢を取得する。ここでは、コントローラ36は、車体姿勢データにより、車体2の現在の姿勢を取得する。ステップS103では、コントローラ36は、作業機3の現在の姿勢を取得する。ここでは、コントローラ36は、作業機姿勢データにより、作業機3の現在の姿勢を取得する。
ステップS104では、コントローラ36は、作業機3の現在の高さを算出する。コントローラ36は、車体姿勢データと、作業機姿勢データとに基づいて、作業機3の高さを算出する。例えば、作業機3の高さは、ブレード16の左端部161の高さと右端部162の高さである。ここで、作業機3の高さは、図12に示す車体2の原点O1を基準点として、原点O1からの重力方向における高さを意味する。例えば、作業機3の高さは、車体2の原点O1を含む水平面からの重力方向における作業機3の高さを意味する。
図12に示すように、作業機械1が前進して作業を行う場合、車体2の原点O1は、タンデムドライブ5に配置される。例えば、車体2の原点O1は、後軸10の左右方向における中心に配置される。図12において、Z1軸は、重力方向を示している。X1軸は、重力方向に垂直な車体2の前後方向を示している。図4において、Y1軸は、重力方向に垂直な車体2の左右方向を示している。車体2の姿勢は、車体2の原点O1を中心に変化する。例えば、図9に示すように、車体2のピッチ角θ6は、原点O1を中心に変化する。図10に示すように、車体2のロール角θ7は、原点O1を中心に変化する。
ステップS105では、コントローラ36は、作業機3の目標姿勢を決定する。コントローラ36は、作業機3の高さが目標高さとなるような、作業機3の目標姿勢を算出する。なお、コントローラ36は、操作装置35の操作が行われなくなったと判定したときの作業機3の高さを、目標高さとして記憶している。例えば、コントローラ36は、作業機3の高さが目標高さとなるような、ドローバ17の目標ピッチ角と目標ロール角を算出する。
ステップS106では、コントローラ36は、作業機3の高さが目標高さとなるように、アクチュエータ22-27の少なくとも1つを制御する。例えば、コントローラ36は、ドローバ17のピッチ角θ2が目標ピッチ角となり、且つ、ドローバ17のロール角θ3が目標ロール角となるように、リフトシリンダ22,23とドローバシフトシリンダ24とを制御する。
この場合、コントローラ36は、ブレード16の左右方向の位置を変化させないように、リフトシリンダ22,23とドローバシフトシリンダ24とを制御する。すなわち、作業機械1においては、リフトシリンダ22,23の伸縮により、ブレード16の高さ方向だけでなく、ブレード16の左右方向の位置も変化してしまう。そのため、コントローラ36は、リフトシリンダ22,23の伸縮によるブレード16の左右方向の位置の変化を相殺するように、ドローバシフトシリンダ24を制御する。それにより、作業機3の高さが目標高さに維持されると共に、作業機3の左右方向の位置が維持される。
コントローラ36は、上述したステップS102~S106の処理を繰り返すことで、作業機3を目標高さに保持するように、アクチュエータ22-27を制御する。また、コントローラ36は、自動制御中に操作装置35が操作されたときには、自動制御を終了する(ステップS101)。
以上説明した本実施形態に係る作業機械1によれば、自動制御によって、作業機3が、作業機3の目標高さに保持される。目標高さは、車体2の原点O1からの重力方向における高さであり、車体2の姿勢が変化しても、作業機3が、作業機3の目標高さに保持される。そのため、作業機械1が起伏のある地面を走行するときであっても、作業機3が目標高さに精度よく保持される。
例えば、図9において、破線で示すブレード16’は、自動制御が行われない場合のブレード16の位置を示している。図9に示すように、自動制御が行われない場合、前輪6が起伏に乗り上げたときに、ブレード16’は、図12に示すブレード16の位置よりも上昇してしまう。しかし、本実施形態に係る作業機械1では、図9に示すように、自動制御によって、ブレード16が、重力方向における作業機3の目標高さに保持される。そのため、前輪6が起伏に乗り上げても、コントローラ36がアクチュエータ22-27を制御することで、ブレード16が目標高さに精度よく保持される。
以上、本発明の一実施形態について説明したが、本発明は上記実施形態に限定されるものではなく、発明の要旨を逸脱しない範囲で種々の変更が可能である。
作業機械1は、モータグレーダに限らず、ブルドーザなどの他の作業機械であってもよい。ブルドーザなどの他の作業機械においては、原点O1の位置は作業機械の構造上の特性に応じて、適宜設定することができる。作業機3の構成は、上記の実施形態のものに限らず、変更されてもよい。例えば、作業機3は、ブレードとリフトアームとを含んでもよい。リフトアームは、ブレードを支持し、車体に接続されてもよい。作業機3の姿勢を示すパラメータは、上記の実施形態のものに限らず、変更されてもよい。
複数の操作部材41-46は、上記の実施形態のものに限らず、変更されてもよい。例えば、操作部材は、レバーに限らず、ジョイスティック、スイッチ、或いはタッチパネルなどの他の部材であってもよい。複数の操作部材41-46は、アクチュエータ22-27のそれぞれを直接的に操作するものであってもよい。
作業機3の姿勢を検出するためのセンサは、上記の実施形態のものに限らず、変更されてもよい。センサS1-S5は、ストローク長に限らず、角度を直接的に検出してもよい。作業機センサ48は、IMU(慣性計測装置)を含んでもよい。IMUは、ドローバ17に装着されてもよい。IMUによって、ドローバ17の姿勢が検出されてもよい。左シリンダ角度センサS7と右シリンダ角度センサS8とのいずれか一方が省略されてもよい。
操作装置35は、自動制御のための操作部材を含んでもよい。コントローラ36は、自動制御のための操作部材の操作に応じて、自動制御を開始してもよい。コントローラ36は、自動制御のための操作部材の操作に応じて、自動制御を終了してもよい。コントローラ36は、自動制御のための操作部材の操作に応じて、自動制御が開始されたときの作業機3の高さを、目標高さとして記憶してもよい。
上述した自動制御において、車体2の姿勢(角度)、或いは、姿勢の変化(角速度)が所定値を超えるような場合には、センサS1-S8による検出誤差が大きくなる可能性がある。また、所定量以上の急加速、或いは、急減速が行われた場合にも、センサS1-S8の反応速度が追い付かない可能性がある。このような場合に、コントローラ36は、自動制御を一時的に解除してもよい。コントローラ36は、作業機3の目標姿勢と現在の姿勢との差が所定の閾値を超える場合に、自動制御を一時的に解除してもよい。
上述した実施形態においては、作業機械1が前進して作業を行う場合の自動制御について説明したが、作業機械1が後進して作業を行う場合に対して、本発明が適用されてもよい。その場合、車体2の原点Oは、左右の前輪6の間の中心位置であってもよい。
上述した実施形態においては、コントローラ36は、操作装置35の操作が一定時間無かったときの作業機3の姿勢を取得し、そのときの作業機3の高さを、作業機3の現在の高さとして取得している。しかし、作業機3の現在の高さを取得するための方法は、これに限らず、変更されてもよい。例えば、コントローラ36は、押しボタンなどの操作装置の操作が行われたときの作業機3の姿勢を取得し、そのときの作業機3の高さを、作業機3の現在の高さとして取得してもよい。取得された作業機3の高さを所定量だけ増減させるためのスイッチが設けられてもよい。コントローラ36は、スイッチの操作に応じて、作業機3の目標姿勢を変更してもよい。それにより、作業機3の目標姿勢を微調整することができる。
本発明によれば、作業機械が起伏のある地面を走行するときであっても、作業機が目標高さに精度よく保持される。
2:車体、 3:作業機、 4:車体フレーム、 5:タンデムドライブ、 6:前輪、 7A,7B:後輪、 22-27:アクチュエータ、 35:操作装置、 36:コントローラ、 48:作業機センサ、 49:車体センサ
Claims (10)
- 車体と、
前記車体に対して動作可能に支持される作業機と、
前記作業機に接続され、前記作業機を動作させるアクチュエータと、
前記車体の姿勢を示す車体姿勢データを検出する車体センサと、
前記作業機の姿勢を示す作業機姿勢データを検出する作業機センサと、
コントローラと、
を備え、
前記コントローラは、
前記車体姿勢データを取得し、
前記作業機姿勢データを取得し、
前記車体姿勢データと、前記作業機姿勢データとに基づいて、前記車体の基準点からの重力方向における前記作業機の高さを算出し、
前記車体の姿勢が変化しても、前記重力方向における前記作業機の高さを維持するように、前記アクチュエータを制御する、
作業機械。 - 前記車体は、
前輪と、
前記前輪と前記作業機とを支持する車体フレームと、
後輪と、
前記後輪を支持し、左右方向に延びる後軸を含み、前記車体フレームを前記後軸回りに揺動可能に支持するタンデムドライブと、
を含み、
前記コントローラは、前記車体フレームが前記タンデムドライブに対して前記後軸回りに揺動しても、前記重力方向における前記作業機の高さを維持する、
請求項1に記載の作業機械。 - 前記車体の基準点は、前記タンデムドライブに配置される、
請求項2に記載の作業機械。 - オペレータによって操作可能な操作装置をさらに備え、
前記コントローラは、
前記操作装置の操作を示す操作信号を取得し、
前記操作装置の操作に応じて前記作業機が動作するように、前記アクチュエータを制御し、
前記操作装置の操作が終了したときの前記作業機の高さを、目標高さとして記憶し、
前記車体の姿勢が変化しても、前記重力方向における前記作業機の高さを前記目標高さに維持するように、前記アクチュエータを制御する、
請求項1から3のいずれかに記載の作業機械。 - 前記コントローラは、前記車体の姿勢が変化しても、前記作業機の左右方向における位置を維持するように、前記アクチュエータを制御する、
請求項1から4のいずれかに記載の作業機械。 - 車体と、前記車体に対して動作可能に支持される作業機と、前記作業機に接続され、前記作業機を動作させるアクチュエータと、を備える作業機械を制御するための方法であって、
前記車体の姿勢を示す車体姿勢データを取得することと、
前記作業機の姿勢を示す作業機姿勢データを取得することと、
前記車体姿勢データと、前記作業機姿勢データとに基づいて、前記車体の基準点からの重力方向における前記作業機の高さを算出することと、
前記車体の姿勢が変化しても、前記重力方向における前記作業機の高さを維持するように、前記アクチュエータを制御すること、を備える方法。 - 前記車体は、
前輪と、
前記前輪と前記作業機とを支持する車体フレームと、
後輪と、
前記後輪を支持し、左右方向に延びる後軸を含み、前記車体フレームを前記後軸回りに揺動可能に支持するタンデムドライブと、
を含み、
前記車体フレームが前記タンデムドライブに対して前記後軸回りに揺動しても、前記重力方向における前記作業機の高さが維持される、
請求項6に記載の方法。 - 前記車体の基準点は、前記タンデムドライブに配置される、
請求項7に記載の方法。 - オペレータによって操作可能な操作装置の操作を示す操作信号を取得することと、
前記操作装置の操作に応じて前記作業機が動作するように、前記アクチュエータを制御することと、
前記操作装置の操作が終了したときの前記作業機の高さを、目標高さとして記憶することと、
前記車体の姿勢が変化しても、前記重力方向における前記作業機の高さを前記目標高さに維持するように、前記アクチュエータを制御すること、
をさらに備える請求項6から8のいずれかに記載の方法。 - 前記車体の姿勢が変化しても、前記作業機の左右方向における位置を維持するように、前記アクチュエータを制御することをさらに備える、
請求項6から9のいずれかに記載の方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202280045461.3A CN117561355A (zh) | 2021-10-22 | 2022-08-29 | 作业机械以及用于控制作业机械的方法 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021-173205 | 2021-10-22 | ||
| JP2021173205 | 2021-10-22 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2023067898A1 true WO2023067898A1 (ja) | 2023-04-27 |
Family
ID=86059007
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2022/032445 WO2023067898A1 (ja) | 2021-10-22 | 2022-08-29 | 作業機械、及び、作業機械を制御するための方法 |
Country Status (2)
| Country | Link |
|---|---|
| CN (1) | CN117561355A (ja) |
| WO (1) | WO2023067898A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2024084791A1 (ja) * | 2022-10-20 | 2024-04-25 | 株式会社小松製作所 | 作業機械、及び、作業機械を制御するための方法 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS498003A (ja) * | 1972-05-12 | 1974-01-24 | ||
| JPS5282803A (en) * | 1975-12-29 | 1977-07-11 | Komatsu Mfg Co Ltd | Device for automatically controlling blade of construction machine |
| JPH08165677A (ja) * | 1994-12-13 | 1996-06-25 | Tamagawa Seiki Co Ltd | パワーショベルのバケット位置制御方法及び装置 |
| JP2001193095A (ja) * | 1999-12-15 | 2001-07-17 | Husco Internatl Inc | モータグレーダのブレード高さ制御装置 |
| JP2009041342A (ja) * | 2007-08-10 | 2009-02-26 | Japan Racing Association | ブレード制御装置 |
| US20090313860A1 (en) * | 2008-06-24 | 2009-12-24 | Deere & Company | Automatic depth correction based on blade pitch |
| JP2017172186A (ja) * | 2016-03-23 | 2017-09-28 | 株式会社小松製作所 | モータグレーダの制御方法およびモータグレーダ |
-
2022
- 2022-08-29 CN CN202280045461.3A patent/CN117561355A/zh active Pending
- 2022-08-29 WO PCT/JP2022/032445 patent/WO2023067898A1/ja active Application Filing
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS498003A (ja) * | 1972-05-12 | 1974-01-24 | ||
| JPS5282803A (en) * | 1975-12-29 | 1977-07-11 | Komatsu Mfg Co Ltd | Device for automatically controlling blade of construction machine |
| JPH08165677A (ja) * | 1994-12-13 | 1996-06-25 | Tamagawa Seiki Co Ltd | パワーショベルのバケット位置制御方法及び装置 |
| JP2001193095A (ja) * | 1999-12-15 | 2001-07-17 | Husco Internatl Inc | モータグレーダのブレード高さ制御装置 |
| JP2009041342A (ja) * | 2007-08-10 | 2009-02-26 | Japan Racing Association | ブレード制御装置 |
| US20090313860A1 (en) * | 2008-06-24 | 2009-12-24 | Deere & Company | Automatic depth correction based on blade pitch |
| JP2017172186A (ja) * | 2016-03-23 | 2017-09-28 | 株式会社小松製作所 | モータグレーダの制御方法およびモータグレーダ |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2024084791A1 (ja) * | 2022-10-20 | 2024-04-25 | 株式会社小松製作所 | 作業機械、及び、作業機械を制御するための方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN117561355A (zh) | 2024-02-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2023067898A1 (ja) | 作業機械、及び、作業機械を制御するための方法 | |
| JP7358164B2 (ja) | 制御システム、作業車両の制御方法、および、作業車両 | |
| WO2022264713A1 (ja) | 作業機械および作業機械を制御するための方法 | |
| WO2024053259A1 (ja) | 作業機械、及び、作業機械を制御するための方法 | |
| WO2024084791A1 (ja) | 作業機械、及び、作業機械を制御するための方法 | |
| WO2023053700A1 (ja) | 作業機械を制御するためのシステムおよび方法 | |
| JP7402724B2 (ja) | ステアリング装置、および作業機械 | |
| WO2023238504A1 (ja) | 作業機械、作業機械を制御するための方法、及びシステム | |
| WO2023286443A1 (ja) | 作業機械、及び、作業機械を制御するための方法 | |
| WO2023047793A1 (ja) | 作業機械を制御するためのシステム及び方法 | |
| WO2024089987A1 (ja) | 作業機械及び作業機械を制御するための方法 | |
| JP7450525B2 (ja) | 作業車 | |
| WO2023286442A1 (ja) | 作業機械、及び、作業機械を制御するための方法 | |
| CN115003884B (zh) | 作业车辆以及控制方法 | |
| JP7412322B2 (ja) | 作業車 | |
| WO2023112563A1 (ja) | 作業機械、作業機械を制御するための方法、及びシステム | |
| WO2023135916A1 (ja) | 作業機械、作業機械を制御するための方法、及びシステム | |
| WO2023021825A1 (ja) | 作業機械、及び、作業機械を制御するための方法 | |
| JP2024062709A (ja) | 作業機械及び作業機械を制御するための方法 | |
| WO2023286444A1 (ja) | 作業機械、及び作業機械を制御するための方法 | |
| WO2021070577A1 (ja) | 作業機械および作業機械の制御方法 | |
| WO2023145196A1 (ja) | 作業機械、作業機械を制御するための方法、及び、作業機械の制御システム | |
| WO2024070797A1 (ja) | ステアリング装置および作業車両 | |
| JP2023090395A (ja) | 作業機械、作業機械を制御するための方法、及びシステム | |
| JP2022106036A (ja) | 建設機械 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 22883210 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2023554968 Country of ref document: JP |