WO2023067875A1 - 移動体 - Google Patents
移動体 Download PDFInfo
- Publication number
- WO2023067875A1 WO2023067875A1 PCT/JP2022/030231 JP2022030231W WO2023067875A1 WO 2023067875 A1 WO2023067875 A1 WO 2023067875A1 JP 2022030231 W JP2022030231 W JP 2022030231W WO 2023067875 A1 WO2023067875 A1 WO 2023067875A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- wheel
- wheels
- moving body
- mecanum
- configuration
- Prior art date
Links
- 239000000758 substrate Substances 0.000 claims 1
- 230000007246 mechanism Effects 0.000 description 11
- 238000010586 diagram Methods 0.000 description 7
- 238000000034 method Methods 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 239000000725 suspension Substances 0.000 description 2
- 230000001133 acceleration Effects 0.000 description 1
Images








Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60B—VEHICLE WHEELS; CASTORS; AXLES FOR WHEELS OR CASTORS; INCREASING WHEEL ADHESION
- B60B19/00—Wheels not otherwise provided for or having characteristics specified in one of the subgroups of this group
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D61/00—Motor vehicles or trailers, characterised by the arrangement or number of wheels, not otherwise provided for, e.g. four wheels in diamond pattern
- B62D61/06—Motor vehicles or trailers, characterised by the arrangement or number of wheels, not otherwise provided for, e.g. four wheels in diamond pattern with only three wheels
Definitions
- the present disclosure relates to a mobile object that has a plurality of wheels and is capable of omnidirectional movement.
- the omni wheel and mecanum wheel are known as wheels for realizing an omnidirectional movement mechanism that enables movement in the front/rear and left/right directions.
- FIGS. 1(a) and 1(b) show the configuration of the omniwheel 10.
- the omniwheel 10 includes a wheel body 11 and a plurality of barrel-shaped rollers 12 .
- a plurality of rollers 12 are rotatably attached to the outer circumference of the wheel body 11 through a support shaft perpendicular to the axle.
- the omniwheel 10 has a wheel body 11 and a plurality of rollers 12 arranged in a row in the circumferential direction, and has a degree of freedom of movement in the axle direction without the wheel body 11 rotating.
- a movement mechanism with three or more omniwheels 10 allows for pivoting movement and omnidirectional movement.
- FIG. 2(a) shows the configuration of the left mecanum wheel 20a
- FIG. 2(b) shows the configuration of the right mecanum wheel 20b
- the left mecanum wheel 20a and the right mecanum wheel 20b are simply referred to as the "mecanum wheel 20" unless otherwise distinguished.
- the mecanum wheel 20 includes a wheel body 21 and a plurality of barrel-shaped rollers 22 .
- the mecanum wheel 20 has a wheel body 21 and a plurality of rollers 22 arranged in a circumferential direction, and has a degree of freedom of movement in an oblique direction with respect to the axle without the wheel body 21 rotating.
- a plurality of rollers 22 are rotated around the outer circumference of the wheel body 21 through a support shaft that is inclined 45 degrees to the upper left with respect to the axle. possible to be installed.
- a plurality of rollers 22 are inserted through a support shaft that is inclined upward to the right by 45 degrees with respect to the axle, and extend around the outer periphery of the wheel body 21. rotatably mounted.
- a movement mechanism comprising two left mecanum wheels 20a and two right mecanum wheels 20b allows pivoting movement and omnidirectional movement.
- the support shaft of the roller 12 is orthogonal to the axle. Therefore, in order to realize an omnidirectional movement mechanism using three or more omniwheels 10, the orientation of one omniwheel is different from the other.
- Each omniwheel should be placed obliquely (at an angle that is neither parallel nor perpendicular) to the orientation of the omniwheel of the .
- Rectangular box-shaped bases have often been used as bases of movement mechanisms, but when three omniwheels are attached to a rectangular box-shaped base, the omniwheels are arranged at positions spaced apart by 120 degrees in the circumferential direction. Therefore, there is a lot of dead space, and it is difficult to downsize the moving mechanism.
- the four mecanum wheels 20 can be attached to the rectangular box-shaped base so that the wheels are oriented in the same direction, so the dead space can be reduced.
- the four mecanum wheels 20 can be attached to the rectangular box-shaped base so that the wheels are oriented in the same direction, so the dead space can be reduced.
- a four-wheel configuration is adopted, in order to ensure that the driving force of each wheel is transmitted to the ground, it is necessary to provide a suspension device for each wheel to ensure ground contact. It becomes an obstacle to miniaturization of the mechanism.
- an object of the present disclosure is to provide a configuration of a moving mechanism suitable for miniaturization.
- a mobile body capable of omnidirectional movement, comprising a base, three wheels attached to the base, and an actuator for driving each wheel. , provided. Of the three wheels, one or two wheels are first configuration wheels and the remaining wheels are second configuration wheels.
- the first configuration wheel may be a mecanum wheel and the second configuration wheel may be an omni wheel.
- FIG. 4 is a diagram showing another example of the wheel configuration of a moving object;
- FIG. 4 is a diagram showing another example of the wheel configuration of a moving object;
- FIG. 4 is a diagram showing another example of the wheel configuration of a moving object;
- FIG. 4 is a diagram showing another example of the wheel configuration of a moving object;
- FIG. 4 is a diagram showing another example of the wheel configuration of a moving object;
- FIG. 4 is a diagram showing another example of the wheel configuration of a moving object;
- FIG. 4 is a diagram showing another example of the wheel configuration of a moving object;
- FIG. 4 is a diagram showing another example of the wheel configuration of a moving object;
- FIG. 3 shows the configuration of the moving body 1 of the embodiment.
- the moving body 1 has a rectangular box-shaped base 2, and three wheels 30 are rotatably attached to the base 2.
- the base body 2 is provided with actuators 32 that drive the wheels 30 , and the controller 40 independently controls the three actuators 32 .
- the control unit 40 is a main processor that processes and outputs various data and commands, and controls the actuators 32 connected to the wheels 30 so as to move the moving body 1 in a desired direction.
- Three wheels 30 and an actuator 32 that drives each wheel 30 constitute a moving mechanism in the mobile body 1 .
- Actuator 32 may be a motor.
- the sensor 42 may include a triaxial acceleration sensor, a gyro sensor, a positioning sensor, etc., and supplies detected sensor data to the control unit 40 .
- the camera 44 photographs the surroundings and supplies the photographed image to the control unit 40 .
- a plurality of cameras 44 may be arranged so as to capture images of all directions of the base 2 so that the control unit 40 can acquire captured images of the entire periphery of the base 2 .
- control unit 40 may control the actuator 32 based on the sensor data supplied from the sensor 42 and the captured image supplied from the camera 44 to cause the moving body 1 to travel autonomously. Further, the control unit 40 may control the actuator 32 based on the operation instruction from the user received by the communication unit 46 to cause the moving body 1 to travel.
- the moving mechanism of the moving body 1 of the embodiment is composed of three wheels 30 to enable omnidirectional movement, and does not have four or more wheels 30.
- the three wheels 30 attached to the base 2 one or two wheels 30 are first configuration wheels and the remaining wheels 30 are second configuration wheels of a different kind than the first configuration wheels.
- the first configuration wheel may be the mecanum wheel 20 and the second configuration wheel may be the omni wheel 10 .
- the omni-wheel 10 may be a wheel comprising a wheel body 11 and a plurality of rollers 12 rotatably attached to the outer periphery of the wheel body 11 through a support shaft perpendicular to the axle.
- the mecanum wheel 20 may be a wheel comprising a wheel body 21 and a plurality of rollers 22 rotatably attached to the outer circumference of the wheel body 21 through a support shaft that is inclined with respect to the axle. .
- the inclination angles of the plurality of support shafts may all be the same.
- each wheel 30 is mounted parallel to the mounting surface of the rectangular box-shaped base 2, so that the direction of one wheel 30 is parallel or perpendicular to the direction of the other wheels 30. relationship. Since the three wheels 30 are attached parallel to the mounting surface of the base 2, the actuators 32 can be arranged in the base 2 in a space efficient manner as compared with the case where the wheels are attached obliquely to the mounting surface. Space can be used effectively.
- a configuration example of the three wheels 30 will be described below. 4 to 9 below show the positions of the wheels 30 and the actuators 32 with respect to the base body 2, and the illustration of the control unit 40, the sensor 42, the camera 44 and the communication unit 46 is omitted.
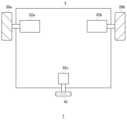
- Fig. 4 shows an example of the wheel configuration of a moving body.
- the moving body 1 includes a pair of right mecanum wheel 20b and left mecanum wheel 20a on the front surface of the base 2, and an omni wheel 10 on the rear surface of the base 2.
- the right mecanum wheel 20b is connected to an actuator 32a
- the left mecanum wheel 20a is connected to an actuator 32b
- the omniwheel 10 is connected to an actuator 32c.
- a pair of right mecanum wheel 20b and left mecanum wheel 20a are arranged to face the same direction.
- the wheel diameters of the right mecanum wheel 20b, the left mecanum wheel 20a, and the omni wheel 10 may be the same.
- the moving body 1 may include a pair of right mecanum wheel 20b and left mecanum wheel 20a on the rear surface of the base 2 and an omni wheel 10 on the front surface of the base 2 .
- FIG. 5 shows another example of the wheel configuration of a moving body.
- the moving body 1 has a left mecanum wheel 20 a on the left side of the base 2 , a right mecanum wheel 20 b on the right side of the base 2 , and an omni wheel 10 on the rear side of the base 2 .
- the left mecanum wheel 20a is connected to an actuator 32a
- the right mecanum wheel 20b is connected to an actuator 32b
- the omniwheel 10 is connected to an actuator 32c.
- the left mecanum wheel 20a and the right mecanum wheel 20b are arranged to face the same direction.
- the wheel diameters of the left mecanum wheel 20a, the right mecanum wheel 20b, and the omni wheel 10 may be the same.
- FIG. 1 shows another example of the wheel configuration of a moving body.
- a pair of left mecanum wheel 20a and right mecanum wheel 20b are attached to both side surfaces of the base 2, so that the user can sensuously recognize the front-rear direction of the mobile body 1.
- FIG. The positions of the left mecanum wheel 20a and the right mecanum wheel 20b may be exchanged with each other.
- FIG. 6 shows another example of the wheel configuration of a moving body.
- the moving body 1 has a left mecanum wheel 20 a on the left side of the base 2 , a right mecanum wheel 20 b on the right side of the base 2 , and an omni wheel 10 on the rear side of the base 2 .
- the wheel arrangement shown in FIG. 6 may be the same as the wheel arrangement shown in FIG.
- the left mecanum wheel 20a and the right mecanum wheel 20b have the same wheel diameter. is different.
- the wheel diameter of the omniwheel 10 is larger than the wheel diameter of the mecanum wheel 20 .
- the step that can be overcome during movement in the front-rear direction depends on the diameter of the roller 12 in the omniwheel 10 . Therefore, as shown in FIG. 6, by increasing the wheel diameter of the omniwheel 10 and increasing the diameter of the roller 12, it is possible to improve the gap running performance of the moving body 1 in the front-rear direction.
- FIG. 7 shows another example of the wheel configuration of a moving body.
- the moving body 1 has a left mecanum wheel 20 a on the left side of the base 2 , a right mecanum wheel 20 b on the right side of the base 2 , and an omni wheel 10 on the rear side of the base 2 .
- the wheel arrangement shown in FIG. 7 may be the same as the wheel arrangement shown in FIG.
- the left mecanum wheel 20a and the right mecanum wheel 20b have the same wheel diameter. is different. As shown, the omniwheel 10 has a smaller wheel diameter than the mecanum wheel 20 . According to the wheel configuration shown in FIG. 7, the omniwheel 10 has a small wheel diameter, which reduces the motion characteristics in the left-right direction.
- FIG. 8 shows another example of the wheel configuration of a moving body.
- the moving body 1 has a left mecanum wheel 20 a on the left side of the base 2 , a left mecanum wheel 20 a on the front of the base 2 , and an omni wheel 10 on the rear of the base 2 .
- the left mecanum wheel 20a on the left side is connected to an actuator 32a
- the left mecanum wheel 20a on the front side is connected to an actuator 32b
- the omniwheel 10 is connected to an actuator 32c.
- the two left mecanum wheels 20a are arranged to face in orthogonal directions. Note that instead of the two left mecanum wheels 20a, two right mecanum wheels 20b may be used.
- FIG. 9 shows another example of the wheel configuration of a moving body.
- the moving body 1 has a left mecanum wheel 20 a on the left side of the base 2 , an omni wheel 10 on the right side of the base 2 , and an omni wheel 10 on the rear side of the base 2 .
- the left mecanum wheel 20a is connected to an actuator 32a
- the omniwheel 10 on the right side is connected to an actuator 32b
- the omniwheel 10 on the rear side is connected to an actuator 32c.
- two of the three wheels 30 are the mecanum wheels 20 and one is the omni wheel 10, but in the wheel configuration example shown in FIG. 9, one is a mecanum wheel. 20, two are omni wheels 10; As shown in FIG. 9, even if one of the three wheels 30 is the mecanum wheel 20 and two are the omni-wheels 10, it is possible to achieve omnidirectional movement.
- the present disclosure can be used for a mobile object that has multiple wheels and is capable of omnidirectional movement.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Manipulator (AREA)
Abstract
移動体1は、基体2と、基体2に取り付けられる3つの車輪30と、各車輪30を駆動するアクチュエータ32とを備え、全方向移動を可能とする。3つの車輪30のうち、1つ又は2つの車輪30は第1形態ホイールであり、残りの車輪30は第2形態ホイールである。1つの車輪30の向きは、他の2つの車輪30の向きに対して、平行または直交する関係にある。
Description
本開示は、複数の車輪を備えて、全方向移動を可能とする移動体に関する。
オムニホイールおよびメカナムホイールは、前後方向、左右方向の移動を可能とする全方向移動機構を実現するための車輪として知られている。
図1(a)および図1(b)は、オムニホイール10の構成を示す。オムニホイール10は、ホイール本体11と、樽形状の複数のローラ12を備える。複数のローラ12は、車軸に対して直交する支持軸を挿通されて、ホイール本体11の外周に回転可能に取り付けられる。オムニホイール10は、ホイール本体11と周方向に複数連なったローラ12とを有して、ホイール本体11が回転せずに車軸方向への移動自由度を有する。3つ以上のオムニホイール10を備える移動機構は、旋回移動および全方向移動を可能とする。
図2(a)は、左メカナムホイール20aの構成を示し、図2(b)は、右メカナムホイール20bの構成を示す。以下、左メカナムホイール20aと右メカナムホイール20bとを特に区別しないときは、単に「メカナムホイール20」と呼ぶ。メカナムホイール20は、ホイール本体21と、樽形状の複数のローラ22を備える。メカナムホイール20は、ホイール本体21と周方向に複数連なったローラ22とを有して、ホイール本体21が回転せずに車軸に対して斜め方向への移動自由度を有する。
図2(a)に示されるように、左メカナムホイール20aにおいては、複数のローラ22が、車軸に対して左斜め上45度傾いた支持軸を挿通されて、ホイール本体21の外周に回転可能に取り付けられる。また図2(b)に示されるように、右メカナムホイール20bにおいては、複数のローラ22が、車軸に対して右斜め上45度傾いた支持軸を挿通されて、ホイール本体21の外周に回転可能に取り付けられる。2つの左メカナムホイール20aと2つの右メカナムホイール20bを備える移動機構は、旋回移動および全方向移動を可能とする。
オムニホイール10においては、ローラ12の支持軸が車軸に直交しているため、3つ以上のオムニホイール10を用いて全方向移動機構を実現するためには、1つのオムニホイールの向きが、他のオムニホイールの向きに対して斜め(平行でも直角でもない角度)になるように、各オムニホイールが配置される必要がある。移動機構の基体として、以前から矩形箱形状の基体が利用されることが多いが、3つのオムニホイールを矩形箱形状の基体に取り付ける場合、オムニホイールは周方向に120度ずつ離れた位置に配置されるため、デッドスペースが多く、移動機構を小型化することが困難となっている。
一方、4つのメカナムホイール20で構成される移動機構においては、車輪向きが同じになるように、4つのメカナムホイール20を矩形箱形状の基体に取り付けることができるため、デッドスペースを少なくできる。一方、4輪構成を採用すると、各車輪の駆動力を確実に地面に伝達させるために、各車輪にサスペンション装置を設けて接地を確保する必要があり、各車輪に設けられるサスペンション装置は、移動機構の小型化の障害となる。
そこで本開示は、小型化に適した移動機構の構成を提供することを目的とする。
上記課題を解決するために、本開示のある態様の移動体は、全方向移動を可能とする移動体であって、基体と、基体に取り付けられる3つの車輪と、各車輪を駆動するアクチュエータと、を備える。3つの車輪のうち、1つ又は2つの車輪は第1形態ホイールであり、残りの車輪は第2形態ホイールである。第1形態ホイールはメカナムホイールであってよく、第2形態ホイールはオムニホイールであってよい。
図3は、実施例の移動体1の構成を示す。移動体1は矩形箱形状の基体2を備え、3つの車輪30が、回転可能に基体2に取り付けられる。基体2には、各車輪30を駆動するアクチュエータ32が設けられ、制御部40が、3つのアクチュエータ32を独立して制御する。制御部40は各種データや命令を処理して出力するメインプロセッサであって、移動体1を所望の方向に移動させるように、各車輪30に連結されるアクチュエータ32を制御する。3つの車輪30、および各車輪30を駆動するアクチュエータ32は、移動体1における移動機構を構成する。アクチュエータ32はモータであってよい。
センサ42は、3軸の加速度センサ、ジャイロセンサ、測位センサなどを含んでよく、検出したセンサデータを制御部40に供給する。カメラ44は周囲を撮影して、撮影画像を制御部40に供給する。複数のカメラ44が基体2の全方位を撮影できるように配置されて、制御部40が、基体2の全周囲の撮影画像を取得できるようにしてもよい。
たとえば制御部40は、センサ42から供給されるセンサデータおよびカメラ44から供給される撮影画像にもとづいてアクチュエータ32を制御して、移動体1を自律走行させてよい。また制御部40は、通信部46が受信するユーザからの操縦指示にもとづいてアクチュエータ32を制御して、移動体1を走行させてもよい。
実施例の移動体1の移動機構は3つの車輪30によって構成されて、全方向移動を可能とし、4つ以上の車輪30を有しない。基体2に取り付けられる3つの車輪30のうち、1つ又は2つの車輪30は第1形態ホイールであり、残りの車輪30は、第1形態ホイールとは異なる種類の第2形態ホイールである。なお実施例で第1形態ホイールはメカナムホイール20であってよく、第2形態ホイールはオムニホイール10であってよい。
オムニホイール10は、ホイール本体11と、車軸に対して直交する支持軸を挿通されて、ホイール本体11の外周に回転可能に取り付けられる複数のローラ12とを備える車輪であってよい。またメカナムホイール20は、ホイール本体21と、車軸に対して斜めに傾いた支持軸を挿通されて、ホイール本体21の外周に回転可能に取り付けられる複数のローラ22とを備える車輪であってよい。なお複数の支持軸の傾斜角はすべて等しくてよい。移動体1は3輪構成をとることで、安定した接地を確保できるため、サスペンション装置を有しなくてよい。
移動体1において、各車輪30は、矩形箱形状の基体2の取付面に平行となるように取り付けられ、そのため1つの車輪30の向きは、他の車輪30の向きに対して、平行または直交する関係となる。3つの車輪30が基体2の取付面に平行となるように取り付けられることで、取付面に斜めとなるように取り付けられる場合と比較すると、基体2内においてアクチュエータ32をスペース効率よく配置でき、基体空間を有効利用できる。
以下、3つの車輪30の構成例について説明する。なお以下の図4~図9は、基体2に対する車輪30およびアクチュエータ32の位置を示し、制御部40、センサ42、カメラ44および通信部46の図示は省略している。
図4は、移動体の車輪構成の一例を示す。移動体1は、基体2の前面に一対の右メカナムホイール20b、左メカナムホイール20aを備え、基体2の後面にオムニホイール10を備える。右メカナムホイール20bはアクチュエータ32aに、左メカナムホイール20aはアクチュエータ32bに、オムニホイール10はアクチュエータ32cに、それぞれ連結される。一対の右メカナムホイール20bおよび左メカナムホイール20aは、同じ方向を向くように配置される。右メカナムホイール20b、左メカナムホイール20a、オムニホイール10の車輪径は同じであってよい。図4に示す車輪構成例では、アクチュエータ32a、32b、32cの向きを揃えることができるため、基体2の空間を有効に利用できる。なお移動体1は、基体2の後面に一対の右メカナムホイール20b、左メカナムホイール20aを備え、基体2の前面にオムニホイール10を備えてもよい。
図5は、移動体の車輪構成の別の例を示す。移動体1は、基体2の左側面に左メカナムホイール20a、基体2の右側面に右メカナムホイール20b、基体2の後面にオムニホイール10を備える。左メカナムホイール20aはアクチュエータ32aに、右メカナムホイール20bはアクチュエータ32bに、オムニホイール10はアクチュエータ32cに、それぞれ連結される。左メカナムホイール20aおよび右メカナムホイール20bは、同じ方向を向くように配置される。左メカナムホイール20a、右メカナムホイール20b、オムニホイール10の車輪径は同じであってよい。図5に示す車輪構成例では、基体2の両側面に一対の左メカナムホイール20a、右メカナムホイール20bが取り付けられるため、ユーザは感覚的に移動体1の前後方向を認識できる。なお左メカナムホイール20aおよび右メカナムホイール20bの位置は、互いに入れ替えられてもよい。
図6は、移動体の車輪構成の別の例を示す。移動体1は、基体2の左側面に左メカナムホイール20a、基体2の右側面に右メカナムホイール20b、基体2の後面にオムニホイール10を備える。図6に示す車輪配置は、図5に示す車輪配置と同じであってよい。
図6に示す車輪構成において、左メカナムホイール20aと右メカナムホイール20bの車輪径は同じであるが、左メカナムホイール20aおよび右メカナムホイール20bの車輪径と、オムニホイール10の車輪径は異なっている。図示されるように、オムニホイール10の車輪径は、メカナムホイール20の車輪径より大きい。図6に示す車輪構成によると、前後方向の移動時に乗り越えられる段差は、オムニホイール10におけるローラ12の径に依存する。そこで図6に示すように、オムニホイール10の車輪径を大きくして、ローラ12の径を大型化することで、移動体1の前後方向のギャップ走破性を高めることができる。
図7は、移動体の車輪構成の別の例を示す。移動体1は、基体2の左側面に左メカナムホイール20a、基体2の右側面に右メカナムホイール20b、基体2の後面にオムニホイール10を備える。図7に示す車輪配置は、図5に示す車輪配置と同じであってよい。
図7に示す車輪構成において、左メカナムホイール20aと右メカナムホイール20bの車輪径は同じであるが、左メカナムホイール20aおよび右メカナムホイール20bの車輪径と、オムニホイール10の車輪径は異なっている。図示されるように、オムニホイール10の車輪径は、メカナムホイール20の車輪径より小さい。図7に示す車輪構成によると、オムニホイール10の車輪径が小さいことで左右方向の運動特性は低下するが、アクチュエータ32cを小型化できることで、移動体1の全体の小型化に寄与する。
図8は、移動体の車輪構成の別の例を示す。移動体1は、基体2の左側面に左メカナムホイール20a、基体2の前面に左メカナムホイール20a、基体2の後面にオムニホイール10を備える。左側面側の左メカナムホイール20aはアクチュエータ32aに、前面側の左メカナムホイール20aはアクチュエータ32bに、オムニホイール10はアクチュエータ32cに、それぞれ連結される。2つの左メカナムホイール20aは、直交する方向を向くように配置される。なお2つの左メカナムホイール20aの代わりに、2つの右メカナムホイール20bが用いられてもよい。
図9は、移動体の車輪構成の別の例を示す。移動体1は、基体2の左側面に左メカナムホイール20a、基体2の右側面にオムニホイール10、基体2の後面にオムニホイール10を備える。左メカナムホイール20aはアクチュエータ32aに、右側面側のオムニホイール10はアクチュエータ32bに、後面側のオムニホイール10はアクチュエータ32cに、それぞれ連結される。
図4~図8に示す車輪構成例では、3つの車輪30のうち、2つがメカナムホイール20、1つがオムニホイール10であったが、図9に示す車輪構成例では、1つがメカナムホイール20、2つがオムニホイール10である。図9に示すように、3つの車輪30のうち、1つがメカナムホイール20、2つがオムニホイール10であっても、全方向移動を実現することが可能である。
以上、本開示を実施例をもとに説明した。上記実施例は例示であり、それらの各構成要素や各処理プロセスの組合せにいろいろな変形例が可能なこと、またそうした変形例も本開示の範囲にあることは当業者に理解されるところである。
本開示は、複数の車輪を備えて、全方向移動を可能とする移動体に利用できる。
1・・・移動体、2・・・基体、10・・・オムニホイール、11・・・ホイール本体、12・・・ローラ、20・・・メカナムホイール、20a・・・左メカナムホイール、20b・・・右メカナムホイール、21・・・ホイール本体、22・・・ローラ、30・・・車輪、32,32a,32b,32c・・・アクチュエータ、40・・・制御部、42・・・センサ、44・・・カメラ、46・・・通信部。
Claims (8)
- 全方向移動を可能とする移動体であって、
基体と、
基体に取り付けられる3つの車輪と、
各車輪を駆動するアクチュエータと、を備え、
3つの車輪のうち、1つ又は2つの車輪は第1形態ホイールであり、残りの車輪は第2形態ホイールである、
ことを特徴とする移動体。 - 前記第1形態ホイールはメカナムホイールであり、前記第2形態ホイールはオムニホイールである、
ことを特徴とする請求項1に記載の移動体。 - 前記第1形態ホイールは、ホイール本体と、車軸に対して斜めに傾いた支持軸を挿通されてホイール本体の外周に回転可能に取り付けられる複数のローラとを備える車輪であり、
前記第2形態ホイールは、ホイール本体と、車軸に対して直交する支持軸を挿通されてホイール本体の外周に回転可能に取り付けられる複数のローラとを備える車輪である、
ことを特徴とする請求項1または2に記載の移動体。 - 1つの車輪の向きは、他の2つの車輪の向きに対して、平行または直交する、
ことを特徴とする請求項1から3のいずれかに記載の移動体。 - 2つの車輪がメカナムホイールであり、1つの車輪がオムニホイールである、
ことを特徴とする請求項1から4のいずれかに記載の移動体。 - 1つのオムニホイールは、前記移動体の前面または後面に取り付けられている、
ことを特徴とする請求項5に記載の移動体。 - 2つのメカナムホイールの車輪径は同じである、
ことを特徴とする請求項5または6に記載の移動体。 - 前記第1形態ホイールの車輪径と、前記第2形態ホイールの車輪径は異なる、
ことを特徴とする請求項1から7のいずれかに記載の移動体。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021-171192 | 2021-10-19 | ||
| JP2021171192A JP2023061284A (ja) | 2021-10-19 | 2021-10-19 | 移動体 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2023067875A1 true WO2023067875A1 (ja) | 2023-04-27 |
Family
ID=86059062
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2022/030231 WO2023067875A1 (ja) | 2021-10-19 | 2022-08-08 | 移動体 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP2023061284A (ja) |
| WO (1) | WO2023067875A1 (ja) |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018131165A (ja) * | 2017-02-17 | 2018-08-23 | 学校法人 中央大学 | 壁面吸着装置及び壁面移動装置 |
| JP2019053391A (ja) * | 2017-09-13 | 2019-04-04 | 日本電産シンポ株式会社 | 移動体 |
| JP2020045089A (ja) * | 2018-07-25 | 2020-03-26 | ザ・ボーイング・カンパニーThe Boeing Company | 非水平面上でクローリングする自走式ロボット車両のための重力補償 |
| JP2020149508A (ja) * | 2019-03-14 | 2020-09-17 | 株式会社東芝 | 移動体、制御装置、周囲物体検出器、及び監視装置 |
-
2021
- 2021-10-19 JP JP2021171192A patent/JP2023061284A/ja active Pending
-
2022
- 2022-08-08 WO PCT/JP2022/030231 patent/WO2023067875A1/ja active Application Filing
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018131165A (ja) * | 2017-02-17 | 2018-08-23 | 学校法人 中央大学 | 壁面吸着装置及び壁面移動装置 |
| JP2019053391A (ja) * | 2017-09-13 | 2019-04-04 | 日本電産シンポ株式会社 | 移動体 |
| JP2020045089A (ja) * | 2018-07-25 | 2020-03-26 | ザ・ボーイング・カンパニーThe Boeing Company | 非水平面上でクローリングする自走式ロボット車両のための重力補償 |
| JP2020149508A (ja) * | 2019-03-14 | 2020-09-17 | 株式会社東芝 | 移動体、制御装置、周囲物体検出器、及び監視装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2023061284A (ja) | 2023-05-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10399620B2 (en) | Spherical robot and method of controlling the same | |
| US9561870B2 (en) | Carrier having non-orthogonal axes | |
| WO2018064831A1 (zh) | 一种云台、无人机及其控制方法 | |
| WO2019153293A1 (zh) | 云台及其控制方法、无人机 | |
| JP4550850B2 (ja) | 圧電モータシステム | |
| JP4105580B2 (ja) | 球アクチュエータ | |
| US20110231013A1 (en) | Magnetic spherical balancing robot drive | |
| US20090297137A1 (en) | Omni-directional camera system | |
| US11287830B2 (en) | Control method of multipurpose rollable moving device | |
| CN206067368U (zh) | 全向轮、包括全向轮的机器人移动平台及移动机器人 | |
| KR101190294B1 (ko) | 이동 로봇용 영상 안정화 장치 | |
| CN206202711U (zh) | 一种云台及无人机 | |
| CN106427390A (zh) | 全向轮、包括全向轮的机器人移动平台及移动机器人 | |
| JP5305285B2 (ja) | 球体駆動式全方向移動装置 | |
| WO2023067875A1 (ja) | 移動体 | |
| JP2018118525A (ja) | 飛行作業体、および、それを用いた作業システム | |
| JP2018072657A (ja) | 光学ユニット | |
| WO2012008005A1 (ja) | 倒立振子型移動体および移動ロボット | |
| US20170094174A1 (en) | Imaging device | |
| CN101458435B (zh) | 全方向照相机系统 | |
| JP2009247211A (ja) | 圧電モータ | |
| WO2022198695A1 (zh) | 滚刷式全向行走的机器人及其行走控制方法 | |
| JPS6399680A (ja) | 撮影装置 | |
| JP7161754B2 (ja) | 移動走行装置 | |
| JP2018170871A (ja) | 全方向移動車両 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 22883187 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 22883187 Country of ref document: EP Kind code of ref document: A1 |