WO2023047535A1 - 利用者検出装置、利用者検出システム、利用者検出方法、及び非一時的なコンピュータ可読媒体 - Google Patents
利用者検出装置、利用者検出システム、利用者検出方法、及び非一時的なコンピュータ可読媒体 Download PDFInfo
- Publication number
- WO2023047535A1 WO2023047535A1 PCT/JP2021/035094 JP2021035094W WO2023047535A1 WO 2023047535 A1 WO2023047535 A1 WO 2023047535A1 JP 2021035094 W JP2021035094 W JP 2021035094W WO 2023047535 A1 WO2023047535 A1 WO 2023047535A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- user
- vehicle
- candidate
- predetermined
- detection device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images







Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
- G06V20/58—Recognition of moving objects or obstacles, e.g. vehicles or pedestrians; Recognition of traffic objects, e.g. traffic signs, traffic lights or roads
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/70—Determining position or orientation of objects or cameras
- G06T7/73—Determining position or orientation of objects or cameras using feature-based methods
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/70—Arrangements for image or video recognition or understanding using pattern recognition or machine learning
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V40/00—Recognition of biometric, human-related or animal-related patterns in image or video data
- G06V40/10—Human or animal bodies, e.g. vehicle occupants or pedestrians; Body parts, e.g. hands
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V40/00—Recognition of biometric, human-related or animal-related patterns in image or video data
- G06V40/20—Movements or behaviour, e.g. gesture recognition
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20081—Training; Learning
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30196—Human being; Person
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30248—Vehicle exterior or interior
- G06T2207/30252—Vehicle exterior; Vicinity of vehicle
Definitions
- the present disclosure relates to user detection devices, user detection systems, user detection methods, and non-transitory computer-readable media.
- Patent Literature 1 discloses an outside information providing device that provides the driver with information about the presence of someone outside the vehicle to whom the driver wishes to convey his/her intention.
- the external information providing device described in Patent Document 1 for example, assists a bus driver in finding a bus user.
- the accuracy of user discovery can be improved by using not only user candidate information but also location information of predetermined landmarks such as bus stops and taxi stands. do.
- a location information acquisition system using artificial satellites is used to acquire location information for predetermined landmarks.
- the position information provided by the position information acquisition system may contain an error to the extent that it interferes with user discovery, causing a decrease in the accuracy of user discovery.
- the present disclosure has been made to solve such problems, and includes a user detection device, a user detection system, a user detection method, and a non-transitory computer-readable medium that improve the accuracy of user discovery. It is intended to provide
- This disclosure is an image processing unit that detects a predetermined mark indicating a user candidate and a boarding place based on an image of the vicinity of the vehicle; a determination unit that determines whether or not the user candidate is a user of the vehicle based on information on the user candidate and the predetermined mark detected by the image processing unit; A user detection device is provided.
- This disclosure is comprising an in-vehicle device and a server device,
- the in-vehicle device Take an image near the vehicle,
- the server device Determining whether the user candidate is a user of the vehicle based on a predetermined mark indicating the user candidate and boarding place detected by image processing of the image;
- a user detection system is provided.
- This disclosure is Based on an image of the vicinity of the vehicle, recognizing a predetermined mark indicating a user candidate and a boarding place, Determining whether or not the user candidate is a user of the vehicle based on the information of the recognized user candidate and the predetermined mark; A user detection method is provided.
- This disclosure is an operation of recognizing a predetermined mark indicating a user candidate and a boarding place based on an image of the vicinity of the vehicle;
- a user detection program for causing a computer to execute an operation of determining whether or not the user candidate is a user of the vehicle based on the information of the recognized user candidate and the predetermined mark is recorded.
- a non-transitory computer-readable medium is provided.
- the present disclosure can provide a user detection device, a user detection system, a user detection method, and a non-transitory computer-readable medium that improve the accuracy of user discovery.
- FIG. 1 is a block diagram showing the configuration of a user detection device according to a first embodiment
- FIG. 4 is a flow chart showing the operation of the user detection device according to the first embodiment
- It is a block diagram which shows the structure of the user detection apparatus which concerns on 2nd Embodiment.
- It is a block diagram which shows the structure of the user detection apparatus which concerns on 2nd Embodiment.
- 9 is a flow chart showing the operation of the user detection device according to the second embodiment
- FIG. 11 is a block diagram showing the configuration of a user detection device according to a third embodiment
- FIG. FIG. 11 is a block diagram showing the configuration of a user detection device according to a fourth embodiment
- FIG. FIG. 11 is a block diagram showing the configuration of a user detection device according to a fifth embodiment
- FIG. 1 is a block diagram showing the configuration of the user detection device according to the first embodiment.
- the user detection device 1 includes an image processing section 11 and a determination section 12 .
- the image processing unit 11 detects user candidates and predetermined marks based on an image of the vicinity of the vehicle. Further, the determination unit 12 determines whether or not the user candidate is a vehicle user, based on the user candidate detected by the image processing unit 11 and the predetermined mark indicating the boarding place.
- FIG. 2 is a flow chart showing the operation of the user detection device according to the first embodiment.
- the image processing unit 11 detects user candidates and predetermined landmarks based on images taken near the vehicle (step ST101).
- determination section 12 determines whether or not the user candidate is a vehicle user (step ST102).
- the user detection device 1 detects not only the user candidate but also the predetermined mark in the image, thereby accurately determining the positional relationship between the user candidate and the predetermined mark. can be obtained. As a result, the user detection device 1 improves the accuracy of user discovery.
- FIG. 3 is a block diagram showing the configuration of a user detection device according to the second embodiment.
- the user detection device 1 is a device that is attached to a vehicle that needs to find a user, such as a bus or a taxi.
- the user detection device 1 includes an image processing unit 11 , a determination unit 12 , an imaging unit 13 and a determination result output unit 14 .
- the user detection device 1 does not necessarily have to be configured as one physical device.
- the image processing unit 11, the determination unit 12, the imaging unit 13, and the determination result output unit 14 may be distributed and arranged in a plurality of physical devices.
- the image processing unit 11, the determination unit 12, the imaging unit 13, and the determination result output unit 14 may be configured as separate devices.
- the imaging unit 13 captures an image near the vehicle and outputs it to the image processing unit 11 .
- the vicinity of the vehicle may include, for example, an area on the sidewalk that exists in the traveling direction of the vehicle. That is, when the vehicle is driving on the left side, it is preferable to include the front left side of the vehicle in the imaging range, and when the vehicle is driving on the right side, it is preferable to include the front right side of the vehicle in the imaging range.
- the area photographed by the photographing unit 13 preferably includes an area farther from the vehicle than the distance required for the vehicle to safely stop.
- the imaging unit 13 may be one camera provided in the vehicle, or may be multiple cameras.
- the imaging unit 13 may be a plurality of cameras installed in two or more of the four directions of the front, left and right sides, and rear of the vehicle.
- the image processing unit 11 acquires an image of the vicinity of the vehicle from the imaging unit 13 .
- the image processing unit 11 performs image processing on the acquired image to detect user candidates and predetermined marks.
- the image processing unit 11 may detect the state of the user candidate in the image processing.
- the image processing unit 11 may also detect the distance between the detected user candidate and a predetermined mark.
- the image processing unit 11 outputs information on the detected user candidates and predetermined marks to the determination unit 12 .
- the image processing unit 11 searches for a person's area in the acquired image and detects user candidates. When a plurality of persons are included in the image, the image processing section 11 detects the plurality of persons as user candidates. Further, the state of the user candidate indicates, for example, information such as the position and motion of the user candidate.
- the image processing unit 11 detects, for example, a mark for indicating the boarding place as a predetermined mark in the image processing. For example, when the vehicle is a bus, the image processing unit 11 detects the bus stop as a predetermined landmark.
- the image processing unit 11 may detect a display board representing a taxi stand as a predetermined mark.
- the image processing unit 11 may detect the specified feature as a predetermined mark.
- the image processing unit 11 may include an AI (artificial intelligence) engine.
- AI engines are trained to detect people and their states, for example, from images.
- the image processing unit 11 inputs the acquired image to the AI engine, and acquires the user candidate detection result from the AI engine.
- the determination unit 12 acquires from the image processing unit 11 information regarding the state of the user candidate and the distance between the user candidate and the predetermined mark. Then, the determination unit 12 determines whether or not the user candidate is a vehicle user based on the state of the user candidate and the distance between the user candidate and the predetermined mark.
- the determination unit 12 determines whether or not the distance between the user candidate and a predetermined mark is equal to or less than a predetermined value. When a plurality of user candidates are detected, the determination unit 12 determines whether or not the distance is equal to or less than a predetermined value for each of the plurality of user candidates.
- the judging unit 12 judges whether or not the state of a user candidate whose distance from a predetermined mark is equal to or less than a predetermined value satisfies a predetermined condition. Then, the determination unit 12 determines that the user candidate who satisfies the predetermined condition is the user. When determining that at least one or more user candidates are users, the determination unit 12 outputs the user information to the determination result output unit 14 .
- the predetermined condition for the state of the user candidate may be, for example, that the user candidate stays at the same place. That is, it may be determined that the user candidate is the user by detecting a state in which the user candidate is waiting in the vicinity of a predetermined mark. It should be noted that "staying at the same place” does not mean that the user candidate stops completely and strictly at one point, and movement is permitted within a range that does not deviate from the purpose.
- the predetermined condition for the status of user candidates may be that a plurality of user candidates are gathered. That is, the determination unit 12 counts the number of user candidates whose distance from a predetermined mark is equal to or less than a predetermined value, and if the number of user candidates is equal to or greater than the predetermined number, All of the user candidates may be determined to be users.
- the predetermined condition for the state of the user candidates may be that the user candidates are lined up. That is, the determining unit 12 determines that, when user candidates are arranged in a straight line, with one of the user candidates determined that the distance from the predetermined mark is equal to or less than a predetermined value, the user candidates are arranged in a straight line. may be determined to be users.
- the determination unit 12 determines that the user candidates may also be determined to be the user.
- the term "aligned in a straight line" does not have to be a strict straight line, and includes a case in which the lines are distorted within a range that does not deviate from the purpose.
- the predetermined condition for the state of the user candidate may be that the user candidate is performing a predetermined action.
- the predetermined motion referred to here may be, for example, the motion of raising a hand or the motion of following the vehicle with the eyes. That is, any motion that can be detected by the image processing unit 11 may be used.
- the predetermined condition for the state of the user candidate is not limited to one, and multiple conditions may be set. Then, when any one or a plurality of conditions are detected, the determination unit 12 may determine the user candidate as the user.
- the image processing unit 11 and the determination unit 12 include, for example, a calculation unit P such as a CPU (Central Processing Unit) as shown in FIG. Memory) or a storage unit M such as a ROM (Read Only Memory).
- a calculation unit P such as a CPU (Central Processing Unit) as shown in FIG. Memory) or a storage unit M such as a ROM (Read Only Memory).
- the image processing unit 11 and the determination unit 12 may be implemented as a single device or component. That is, the image processing unit 11 and the determination unit 12 may be implemented as software or hardware.
- a program includes a group of instructions (or software code) that, when read into a computer, cause the computer to perform one or more functions described in the embodiments.
- the program may be stored in a non-transitory computer-readable medium or tangible storage medium.
- computer readable media or tangible storage media may include random-access memory (RAM), read-only memory (ROM), flash memory, solid-state drives (SSD) or other memory technology, CDs - ROM, digital versatile disc (DVD), Blu-ray disc or other optical disc storage, magnetic cassette, magnetic tape, magnetic disc storage or other magnetic storage device.
- the program may be transmitted on a transitory computer-readable medium or communication medium.
- transitory computer readable media or communication media include electrical, optical, acoustic, or other forms of propagated signals.
- the determination result output unit 14 notifies the user information acquired from the determination unit 12 .
- Targets to which the determination result output unit 14 reports user information are, for example, a driver of a vehicle and an automatic driving control system mounted on the vehicle.
- the determination result output unit 14 may notify the user information by voice, for example, or turn on or blink a light source such as a lamp to notify the user. information may be reported. In this case, the determination result output unit 14 may simply notify the driver of the presence of the user, or may also notify the driver of information such as the position and the number of users.
- the determination result output unit 14 may output the position information of the user to the automatic driving control system.
- the user detection device 1 detects the predetermined mark by image processing, so the accuracy of the positional information of the predetermined mark is improved. Furthermore, since the user is determined from the user candidates based on the acquired positional information of the predetermined mark, the accuracy of user discovery can be improved.
- FIG. 5 is a flow chart showing the operation of the user detection device according to the second embodiment.
- the photographing unit 13 photographs an image near the vehicle (step ST201).
- the image processing unit 11 detects the user candidate and the predetermined mark based on the photographed image (step ST202), and determines the state of the user candidate and the distance between the user candidate and the predetermined mark. is detected (step ST203).
- the determination unit 12 determines whether or not the distance between the user candidate and the predetermined mark is equal to or less than a predetermined value (step ST204). If the distance between the user candidate and the predetermined mark is greater than the predetermined value, that is, if the determination in step ST204 is No, the determination unit 12 determines that the user candidate is not a user, and end the operation of
- the determination unit 12 determines whether the state of the user candidate satisfies a predetermined condition. Determine (step ST205). If the state of the user candidate does not satisfy the predetermined condition, that is, if the determination in step ST205 is No, the determination unit 12 determines that the user candidate is not a user, and terminates the series of operations. do.
- step ST205 If the state of the user candidate satisfies a predetermined condition, that is, if the determination in step ST205 is Yes, the determination result output unit 14 notifies the user's information (step ST206), and the series of operations ends.
- the series of operations described above are repeatedly executed while the user detection device 1 is in operation.
- the number of user candidates determined by the series of operations described above varies depending on the predetermined conditions in step ST205. For example, if the predetermined condition is that the user candidate stays at the same place or that the user candidate performs a predetermined action, a series of actions are performed for each user candidate.
- the series of operations is performed for a plurality of user candidates. is executed for
- the user detection device 1 can improve the accuracy of user detection and notify the detected user information to the driver or the automatic driving control system.
- FIG. 6 is a block diagram showing the configuration of a user detection system according to the third embodiment.
- a user detection system 1001 includes an in-vehicle device 2 and a server device 3 .
- the in-vehicle device 2 and the server device 3 can communicate via a network including a wireless communication network.
- a user detection system 1001 according to this embodiment causes a server device 3 not mounted on a vehicle to perform part of the functions of the user detection device 1 according to the first or second embodiment.
- the server device 3 according to the present embodiment executes functions corresponding to the image processing section 11 and the determination section 12 according to the first or second embodiment.
- the server device executes functions corresponding to the image processing unit and the determination unit.
- the present embodiment is not limited to this.
- the in-vehicle device 2 executes functions corresponding to the image processing unit 11 according to the first or second embodiment
- the server device 3 only functions corresponding to the determination unit 12 according to the first or second embodiment. may be executed.
- the in-vehicle device 2 only needs to have a function of capturing an image in the vicinity of the vehicle. is the user of the vehicle.
- the in-vehicle device 2 includes an imaging unit 21, a determination result output unit 22, and a communication device 23.
- the imaging unit 21 corresponds to the imaging unit 13 according to the second embodiment, and has the same configuration and functions.
- the determination result output unit 22 corresponds to the determination result output unit 14 according to the second embodiment, and has the same configuration and functions.
- the communication device 23 transmits the image captured by the imaging unit 21 to the server device 3 . It also receives user information from the server device 3 and outputs it to the determination result output unit 22 .
- the server device 3 includes an image processing unit 31, a determination unit 32, and a communication unit 33.
- the image processing section 31 corresponds to the image processing section 11 according to the first or second embodiment, and has the same configuration and functions.
- the determination unit 32 corresponds to the determination unit 12 according to the first or second embodiment, and has the same configuration and functions.
- the communication unit 33 receives images from the in-vehicle device 2 and outputs the images to the image processing unit 31 . Also, the user information output by the determination unit 32 is transmitted to the in-vehicle device 2 .
- the server device 3 when the server device 3 is caused to execute a part of the functions of the user detection device 1 according to the first or second embodiment, the equipment installed in the vehicle is simplified, so the cost can be reduced. .
- the fourth embodiment is a first application example of the user detection system 1001 according to the third embodiment.
- the configuration of the user detection system according to the fourth embodiment will be described in detail with reference to the drawings.
- FIG. 7 is a block diagram showing the configuration of a user detection system according to the fourth embodiment.
- a user detection system 1002 according to this embodiment is obtained by adding a position information providing system 4 and a control unit 34, which will be described later, to the user detection system 1001 according to the third embodiment.
- the positional information providing system 4 and the control unit 34 are also applicable to the user detection device 1 according to the first or second embodiment.
- the position information providing system 4 is, for example, a position information providing system using artificial satellites such as GNSS (Global Navigation Satellite System), and outputs the current position information of the vehicle and the position information of a predetermined landmark to the control unit 34.
- the position information providing system 4 includes a position measurement unit mounted on a vehicle (not shown) and a transmission unit that transmits the vehicle position information acquired by the position measurement unit to the control unit 34 .
- the control unit 34 acquires the current location information of the vehicle from the location information providing system 4. Then, the image processing unit 31 and the determination unit 32 are controlled based on the current position information of the vehicle and the position information of the predetermined mark stored in advance by the control unit 34 .
- control unit 34 estimates the distance between the vehicle and a predetermined mark, and determines whether the estimated distance is less than or equal to the predetermined distance. Then, when the estimated distance is equal to or less than the predetermined distance, the image processing section 31 and the determination section 32 are operated. Moreover, when the estimated distance is larger than the predetermined distance, the image processing unit 31 and the determination unit 32 are not operated.
- the fifth embodiment is a second application example of the user detection system according to the third embodiment.
- the configuration of the user detection system according to the fifth embodiment will be described in detail with reference to the drawings.
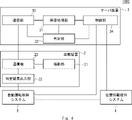
- FIG. 8 is a block diagram showing the configuration of a user detection system according to the fifth embodiment.
- a user detection system 1003 according to the fifth embodiment is obtained by applying the user detection system according to the fourth embodiment to a vehicle equipped with the automatic driving control system 5.
- the automatic driving control system 5 receives the position of the predetermined mark from the control unit 34, and drives the vehicle toward the position of the predetermined mark based on the position information provided by the position information providing system 4. Then, the automatic driving control system 5 acquires the user's position information from the determination result output unit 22 and drives the vehicle so that it stops near the user.
- the user detection system according to the present disclosure can also be applied to user detection in vehicles equipped with an automatic driving control system.
- (Appendix 1) an image processing unit that detects a predetermined mark indicating a user candidate and a boarding place based on an image of the vicinity of the vehicle; a determination unit that determines whether or not the user candidate is a user of the vehicle based on information on the user candidate and the predetermined mark detected by the image processing unit; User detection device. (Appendix 2) The image processing unit detects the state of the user candidate and the distance between the user candidate and the predetermined mark, The determination unit determines whether or not the user candidate is a user of the vehicle based on the state of the user candidate and the distance between the user candidate and the predetermined mark.
- the user detection device according to appendix 1.
- the determination unit the distance between the user candidate and the predetermined mark is less than or equal to a predetermined value; In addition, if the user candidate stays at the same place, determining that the user candidate is the user;
- the user detection device according to appendix 2.
- the determination unit the distance between the user candidate and the predetermined mark is less than or equal to a predetermined value; In addition, if the status of the user candidate is equal to or greater than a predetermined number, determining that the user candidate is the user;
- the user detection device according to appendix 2 or 3.
- the vehicle is a bus;
- the image processing unit detects a bus stop as the predetermined landmark,
- the user detection device according to any one of appendices 1 to 6.
- (Appendix 8) Further comprising a judgment result output unit,
- the vehicle is a vehicle driven under the control of a driver, When the determination unit determines that the user candidate is the user, The determination result output unit notifies the driver of the presence of the user,
- Appendix 9) Informing the driver of the number of users;
- the vehicle is a vehicle driven by the control of an automatic operation control system, When the determination unit determines that the user candidate is the user, The determination result output unit outputs the position information of the user to the automatic operation control system, The user detection device according to any one of appendices 1 to 7.
- the user detection device according to any one of appendices 1 to 7.
- (Appendix 11) estimating the distance between the vehicle and the predetermined landmark based on the position information of the vehicle; If the estimated distance is less than or equal to a predetermined distance, operate the image processing unit and the determination unit; The user detection device according to any one of appendices 1 to 10.
- the image processing unit includes an AI (artificial intelligence) engine, The AI engine learning an image of the predetermined mark or an image of an object similar to the predetermined mark; assisting in detecting the predetermined landmark;
- the user detection device according to any one of appendices 1 to 11.
- (Appendix 13) comprising an in-vehicle device and a server device, The in-vehicle device Take an image near the vehicle, The server device Determining whether the user candidate is a user of the vehicle based on a predetermined mark indicating the user candidate and boarding place detected by image processing of the image; User detection system.
- the in-vehicle device includes a plurality of cameras respectively installed in the front, left and right sides, and rear of the vehicle, 13.
- the user detection system according to appendix 12.
- (Appendix 15) Based on an image of the vicinity of the vehicle, recognizing a predetermined mark indicating a user candidate and a boarding place, Determining whether or not the user candidate is a user of the vehicle based on the information of the recognized user candidate and the predetermined mark; User detection method.
- Appendix 16 an operation of recognizing a predetermined mark indicating a user candidate and a boarding place based on an image of the vicinity of the vehicle;
- a user detection program for causing a computer to execute an operation of determining whether or not the user candidate is a user of the vehicle based on the information of the recognized user candidate and the predetermined mark is recorded.
Landscapes
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Multimedia (AREA)
- Computer Vision & Pattern Recognition (AREA)
- General Health & Medical Sciences (AREA)
- Health & Medical Sciences (AREA)
- Human Computer Interaction (AREA)
- Psychiatry (AREA)
- Social Psychology (AREA)
- Artificial Intelligence (AREA)
- Computing Systems (AREA)
- Databases & Information Systems (AREA)
- Evolutionary Computation (AREA)
- Medical Informatics (AREA)
- Software Systems (AREA)
- Traffic Control Systems (AREA)
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US18/689,478 US20240371174A1 (en) | 2021-09-24 | 2021-09-24 | User detection apparatus, user detection system, user detection method, and computer-readable medium |
| PCT/JP2021/035094 WO2023047535A1 (ja) | 2021-09-24 | 2021-09-24 | 利用者検出装置、利用者検出システム、利用者検出方法、及び非一時的なコンピュータ可読媒体 |
| JP2023549259A JP7715199B2 (ja) | 2021-09-24 | 2021-09-24 | 利用者検出装置、利用者検出システム、利用者検出方法、及び利用者検出プログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2021/035094 WO2023047535A1 (ja) | 2021-09-24 | 2021-09-24 | 利用者検出装置、利用者検出システム、利用者検出方法、及び非一時的なコンピュータ可読媒体 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2023047535A1 true WO2023047535A1 (ja) | 2023-03-30 |
Family
ID=85719381
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2021/035094 Ceased WO2023047535A1 (ja) | 2021-09-24 | 2021-09-24 | 利用者検出装置、利用者検出システム、利用者検出方法、及び非一時的なコンピュータ可読媒体 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US20240371174A1 (https=) |
| JP (1) | JP7715199B2 (https=) |
| WO (1) | WO2023047535A1 (https=) |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015083417A (ja) * | 2013-10-25 | 2015-04-30 | 株式会社Nttドコモ | 情報処理装置、プログラム及び交通情報の報知方法 |
| JP2016184276A (ja) * | 2015-03-26 | 2016-10-20 | パイオニア株式会社 | 携帯端末、携帯端末の制御方法、および、携帯端末用プログラム |
| JP2016218894A (ja) * | 2015-05-25 | 2016-12-22 | 日本電気株式会社 | 見込み客位置情報通知システム、方法およびプログラム |
| WO2018037954A1 (ja) * | 2016-08-26 | 2018-03-01 | ソニー株式会社 | 移動体制御装置、移動体制御方法、及び、移動体 |
| JP2021092932A (ja) * | 2019-12-09 | 2021-06-17 | トヨタ自動車株式会社 | 情報処理装置、運行管理システム及びプログラム |
-
2021
- 2021-09-24 US US18/689,478 patent/US20240371174A1/en active Pending
- 2021-09-24 JP JP2023549259A patent/JP7715199B2/ja active Active
- 2021-09-24 WO PCT/JP2021/035094 patent/WO2023047535A1/ja not_active Ceased
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015083417A (ja) * | 2013-10-25 | 2015-04-30 | 株式会社Nttドコモ | 情報処理装置、プログラム及び交通情報の報知方法 |
| JP2016184276A (ja) * | 2015-03-26 | 2016-10-20 | パイオニア株式会社 | 携帯端末、携帯端末の制御方法、および、携帯端末用プログラム |
| JP2016218894A (ja) * | 2015-05-25 | 2016-12-22 | 日本電気株式会社 | 見込み客位置情報通知システム、方法およびプログラム |
| WO2018037954A1 (ja) * | 2016-08-26 | 2018-03-01 | ソニー株式会社 | 移動体制御装置、移動体制御方法、及び、移動体 |
| JP2021092932A (ja) * | 2019-12-09 | 2021-06-17 | トヨタ自動車株式会社 | 情報処理装置、運行管理システム及びプログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| US20240371174A1 (en) | 2024-11-07 |
| JPWO2023047535A1 (https=) | 2023-03-30 |
| JP7715199B2 (ja) | 2025-07-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6368651B2 (ja) | 走行環境認識システム | |
| JP7461399B2 (ja) | 原動機付き車両の走行動作を補助する方法及びアシスト装置並びに原動機付き車両 | |
| US20200118418A1 (en) | Sound monitoring and reporting system | |
| US10718628B2 (en) | Host vehicle position estimation device | |
| WO2020022042A1 (ja) | 劣化診断装置、劣化診断システム、劣化診断方法、プログラムを記憶する記憶媒体 | |
| CN110869867B (zh) | 用于对车辆的数字地图进行验证的方法、设备和存储介质 | |
| US20220277570A1 (en) | Cognitive function estimation device, learning device, and cognitive function estimation method | |
| CN111325088B (zh) | 信息处理系统、记录介质以及信息处理方法 | |
| CN111027381A (zh) | 利用单目相机识别障碍物的方法、装置、设备及存储介质 | |
| US20180224296A1 (en) | Image processing system and image processing method | |
| CN111645674B (zh) | 车辆控制装置 | |
| CN108327719A (zh) | 辅助车辆行驶的方法及装置 | |
| KR20210034097A (ko) | 자율주행 차량들을 위한 카메라 평가 기술들 | |
| JP7680599B2 (ja) | 情報処理装置および情報処理方法 | |
| KR20200039046A (ko) | 자율주행차량의 호출자 탐색 방법 | |
| CN110852984A (zh) | 信息处理系统、存储程序的存储介质以及信息处理装置控制方法 | |
| CN113950020A (zh) | 用于自主车辆的车辆共乘定位和乘客识别 | |
| CN114677848B (zh) | 感知预警系统、方法、装置及计算机程序产品 | |
| CN119027636A (zh) | 位置推定装置、位置推定方法及位置推定用计算机程序 | |
| US12223701B2 (en) | Systems and methods for training event prediction models for camera-based warning systems | |
| WO2023047535A1 (ja) | 利用者検出装置、利用者検出システム、利用者検出方法、及び非一時的なコンピュータ可読媒体 | |
| JP7163759B2 (ja) | 情報提供装置、車両、運転支援システム、及び運転支援方法 | |
| JP6665522B2 (ja) | 情報処理装置、情報処理システム、および情報処理プログラム | |
| JP7721406B2 (ja) | 情報処理装置及びプログラム | |
| WO2020250938A1 (ja) | 走行管理装置、走行管理方法、記録媒体 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 21958411 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2023549259 Country of ref document: JP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 21958411 Country of ref document: EP Kind code of ref document: A1 |