WO2022149210A1 - Power conversion device, motor driving device, and refrigeration-cycle application device - Google Patents
Power conversion device, motor driving device, and refrigeration-cycle application device Download PDFInfo
- Publication number
- WO2022149210A1 WO2022149210A1 PCT/JP2021/000196 JP2021000196W WO2022149210A1 WO 2022149210 A1 WO2022149210 A1 WO 2022149210A1 JP 2021000196 W JP2021000196 W JP 2021000196W WO 2022149210 A1 WO2022149210 A1 WO 2022149210A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- capacitor
- current
- pulsation
- unit
- control unit
- Prior art date
Links
- 238000006243 chemical reaction Methods 0.000 title claims abstract description 104
- 239000003990 capacitor Substances 0.000 claims abstract description 136
- 238000001514 detection method Methods 0.000 claims abstract description 65
- 230000010349 pulsation Effects 0.000 claims description 127
- 238000004364 calculation method Methods 0.000 claims description 54
- 238000005057 refrigeration Methods 0.000 claims description 10
- 230000007423 decrease Effects 0.000 claims description 9
- 230000000737 periodic effect Effects 0.000 claims description 5
- 238000000034 method Methods 0.000 description 62
- 238000009499 grossing Methods 0.000 description 35
- 230000006866 deterioration Effects 0.000 description 24
- 238000010586 diagram Methods 0.000 description 19
- 230000004907 flux Effects 0.000 description 15
- 230000006835 compression Effects 0.000 description 9
- 238000007906 compression Methods 0.000 description 9
- 230000007246 mechanism Effects 0.000 description 8
- 230000003313 weakening effect Effects 0.000 description 8
- 239000003507 refrigerant Substances 0.000 description 7
- 230000001629 suppression Effects 0.000 description 6
- 230000008859 change Effects 0.000 description 5
- 230000004044 response Effects 0.000 description 5
- 230000000052 comparative effect Effects 0.000 description 4
- 238000001816 cooling Methods 0.000 description 4
- 230000006870 function Effects 0.000 description 4
- 230000007274 generation of a signal involved in cell-cell signaling Effects 0.000 description 4
- 238000010438 heat treatment Methods 0.000 description 4
- 240000007711 Peperomia pellucida Species 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 230000010354 integration Effects 0.000 description 3
- 230000008569 process Effects 0.000 description 3
- 238000012545 processing Methods 0.000 description 3
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical compound [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 2
- 230000032683 aging Effects 0.000 description 2
- 238000013473 artificial intelligence Methods 0.000 description 2
- 230000004043 responsiveness Effects 0.000 description 2
- 230000001360 synchronised effect Effects 0.000 description 2
- 238000004804 winding Methods 0.000 description 2
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 1
- 101100234408 Danio rerio kif7 gene Proteins 0.000 description 1
- 101100221620 Drosophila melanogaster cos gene Proteins 0.000 description 1
- 101150109831 SIN4 gene Proteins 0.000 description 1
- 101100398237 Xenopus tropicalis kif11 gene Proteins 0.000 description 1
- 238000004378 air conditioning Methods 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 230000009194 climbing Effects 0.000 description 1
- 238000005094 computer simulation Methods 0.000 description 1
- 238000007796 conventional method Methods 0.000 description 1
- 229910052802 copper Inorganic materials 0.000 description 1
- 239000010949 copper Substances 0.000 description 1
- 101150118300 cos gene Proteins 0.000 description 1
- 238000007791 dehumidification Methods 0.000 description 1
- 238000009795 derivation Methods 0.000 description 1
- 239000004615 ingredient Substances 0.000 description 1
- 238000011835 investigation Methods 0.000 description 1
- 229910052742 iron Inorganic materials 0.000 description 1
- 238000010801 machine learning Methods 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
Images

















Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02M—APPARATUS FOR CONVERSION BETWEEN AC AND AC, BETWEEN AC AND DC, OR BETWEEN DC AND DC, AND FOR USE WITH MAINS OR SIMILAR POWER SUPPLY SYSTEMS; CONVERSION OF DC OR AC INPUT POWER INTO SURGE OUTPUT POWER; CONTROL OR REGULATION THEREOF
- H02M7/00—Conversion of AC power input into DC power output; Conversion of DC power input into AC power output
- H02M7/42—Conversion of DC power input into AC power output without possibility of reversal
- H02M7/44—Conversion of DC power input into AC power output without possibility of reversal by static converters
- H02M7/48—Conversion of DC power input into AC power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode
Definitions
- the present disclosure relates to a power conversion device, a motor drive device, and a refrigeration cycle applicable device for converting AC power into desired power.
- a power conversion device that converts AC power supplied from an AC power source into desired AC power and supplies it to a load such as an air conditioner.
- a power conversion device which is a control device for an air conditioner, rectifies AC power supplied from an AC power supply by a diode stack, which is a rectifying unit, and further smoothes a plurality of powers by a smoothing capacitor.
- an inverter including a switching element of the above and outputting it to a compressor motor which is a load.
- the present disclosure has been made in view of the above, and an object of the present disclosure is to obtain a power conversion device capable of suppressing the increase in size of the device while suppressing the deterioration of the smoothing capacitor.
- the power conversion device is connected to a rectifying unit that rectifies a first AC power supplied from a commercial power source and an output end of the rectifying unit.
- a capacitor, an inverter connected to both ends of the capacitor to generate a second AC power and output it to the motor, a detector that detects the power state of the capacitor, and a pulsation according to the detection value of the detector drives the motor. It is provided with a control unit that controls the operation of the inverter so as to be superimposed on the pattern and suppresses the charge / discharge current of the capacitor.
- the power conversion device has the effect of suppressing the deterioration of the smoothing capacitor and suppressing the increase in size of the device.
- the figure which shows the structural example of the power conversion apparatus which concerns on Embodiment 1. A block diagram showing a configuration example of a control unit included in the power conversion device according to the first embodiment. The figure which shows the structural example of the q-axis current pulsation calculation part of the control part provided in the power conversion apparatus which concerns on Embodiment 1.
- a diagram showing an example of a drive waveform in a power conversion device having the same circuit configuration as the power conversion device of the first embodiment. The figure which shows the example of the drive waveform in the power conversion apparatus which concerns on Embodiment 1. A flowchart showing the operation of the control unit included in the power conversion device according to the first embodiment.
- the figure which shows the structural example of the power conversion apparatus which concerns on Embodiment 3. A block diagram showing a configuration example of a control unit included in the power conversion device according to the third embodiment.
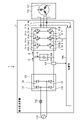
- FIG. 1 is a diagram showing a configuration example of the power conversion device 1 according to the first embodiment.
- the power converter 1 is connected to the commercial power supply 110 and the compressor 315.
- the power conversion device 1 converts the first AC power of the power supply voltage Vs supplied from the commercial power supply 110 into the second AC power having a desired amplitude and phase, and supplies the first AC power to the compressor 315.
- the power conversion device 1 includes a reactor 120, a rectifying unit 130, a current detecting unit 501, a smoothing unit 200, an inverter 310, current detecting units 313a and 313b, and a control unit 400.
- the motor drive device 2 is composed of the power converter 1 and the motor 314 included in the compressor 315.
- the reactor 120 is connected between the commercial power supply 110 and the rectifying unit 130.
- the rectifying unit 130 has a bridge circuit composed of rectifying elements 131 to 134, and rectifies and outputs the first AC power of the power supply voltage Vs supplied from the commercial power supply 110.
- the rectifying unit 130 performs full-wave rectification.
- the current detection unit 501 detects the current rectified by the rectifying unit 130 and flows into the smoothing unit 200 from the rectifying unit 130, that is, the input current to the smoothing unit 200, and outputs the detected current value to the control unit 400.
- the current detection unit 501 is a detection unit that detects the power state of the capacitor 210.
- the smoothing unit 200 is connected to the output end of the rectifying unit 130.
- the smoothing unit 200 has a capacitor 210 as a smoothing element, and smoothes the electric power rectified by the rectifying unit 130.
- the capacitor 210 is, for example, an electrolytic capacitor, a film capacitor, or the like.
- the capacitor 210 is connected to the output end of the rectifying unit 130 and has a capacity for smoothing the power rectified by the rectifying unit 130, and the voltage generated in the capacitor 210 by the smoothing is full-wave rectification of the commercial power supply 110. It is not a waveform shape, but a waveform shape in which a voltage ripple corresponding to the frequency of the commercial power supply 110 is superimposed on a DC component, and does not pulsate significantly.
- the frequency of this voltage ripple is twice the frequency of the power supply voltage Vs when the commercial power supply 110 is single-phase, and is mainly composed of six times the frequency when the commercial power supply 110 is three-phase.
- the amplitude of this voltage ripple is determined by the capacity of the capacitor 210.
- the voltage ripple generated in the capacitor 210 is pulsating in a range where the maximum value is less than twice the minimum value.
- the inverter 310 is connected to the smoothing portion 200, that is, both ends of the capacitor 210.
- the inverter 310 has switching elements 311a to 311f and freewheeling diodes 312a to 312f.
- the inverter 310 turns on and off the switching elements 311a to 311f under the control of the control unit 400, and converts the power output from the rectifying unit 130 and the smoothing unit 200 into a second AC power having a desired amplitude and phase, that is, a second AC power.
- AC power is generated and output to the compressor 315.
- the current detection units 313a and 313b each detect the current value of one of the three-phase currents output from the inverter 310, and output the detected current value to the control unit 400.
- the control unit 400 can calculate the current value of the remaining one phase output from the inverter 310 by acquiring the current value of two phases out of the current values of the three phases output from the inverter 310. ..
- the compressor 315 is a load having a motor 314 for driving the compressor.
- the motor 314 rotates according to the amplitude and phase of the second AC power supplied from the inverter 310, and performs a compression operation.
- the load torque of the compressor 315 can often be regarded as a constant torque load.
- FIG. 1 shows a case where the motor winding is Y-connected, but this is an example and is not limited thereto.
- the motor winding of the motor 314 may have a ⁇ connection or a specification in which the Y connection and the ⁇ connection can be switched.
- the arrangement of each configuration shown in FIG. 1 is an example, and the arrangement of each configuration is not limited to the example shown in FIG.
- the reactor 120 may be arranged after the rectifying unit 130.
- the power conversion device 1 may be provided with a boosting unit, or the rectifying unit 130 may be provided with the function of a boosting unit.
- the current detection unit 501 and the current detection units 313a and 313b may be collectively referred to as a detection unit.
- the current value detected by the current detection unit 501 and the current value detected by the current detection units 313a and 313b may be referred to as a detection value.
- the control unit 400 acquires the current value of the input current of the smoothing unit 200 from the current detection unit 501, and the current of the second AC power having a desired amplitude and phase converted from the current detection units 313a and 313b by the inverter 310. Get the value.
- the control unit 400 controls the operation of the inverter 310, specifically, the on / off of the switching elements 311a to 311f of the inverter 310 by using the detection value detected by each detection unit.
- the control unit 400 outputs a second AC power including a pulsation corresponding to the pulsation of the electric power flowing from the rectifying unit 130 to the capacitor 210 of the smoothing unit 200 from the inverter 310 to the compressor 315 which is a load.
- the operation of the inverter 310 is controlled so as to be performed.
- the pulsation according to the pulsation of the electric power flowing into the capacitor 210 of the smoothing portion 200 is, for example, a pulsation that fluctuates depending on the frequency of the pulsation of the electric power flowing into the capacitor 210 of the smoothing portion 200.
- the control unit 400 suppresses the current flowing through the capacitor 210 of the smoothing unit 200.
- the control unit 400 does not have to use all the detected values acquired from each detection unit, and may perform control using some of the detected values.
- the control unit 400 controls so that any one of the speed, voltage, and current of the motor 314 is in a desired state.
- the motor 314 is used for driving the compressor 315 and the compressor 315 is a closed type compressor, it is structurally and cost-wise to attach a position sensor for detecting the rotor position to the motor 314. Since it is difficult, the control unit 400 controls the motor 314 without a position sensor.
- a sensorless vector control will be described as a base. The control method described below can also be applied to the constant primary magnetic flux control with minor changes.
- the input current from the rectifying unit 130 to the capacitor 210 of the smoothing unit 200 is the input current I1
- the output current from the capacitor 210 of the smoothing unit 200 to the inverter 310 is the output current I2.
- the charge / discharge current of the capacitor 210 of the smoothing portion 200 be the charge / discharge current I3.
- the input current I1 is affected by the power supply phase of the commercial power supply 110, the characteristics of the elements installed before and after the rectifying unit 130, and the like, it basically has a characteristic of including a component 2n times the power supply frequency. Note that n is an integer of 1 or more.
- the ripple component caused by PWM Pulse Width Modulation
- the control unit 400 needs to control the inverter 310 in consideration of the ripple component.
- the control unit 400 monitors the power state of the smoothing unit 200, that is, the capacitor 210, and gives an appropriate pulsation to the motor 314 so that the charge / discharge current I3 decreases. good.
- the power state of the capacitor 210 is an input current I1 to the capacitor 210, an output current I2 from the capacitor 210, a charge / discharge current I3 of the capacitor 210, a DC bus voltage Vdc of the capacitor 210, and the like.
- the control unit 400 needs information on at least one of the power states of these capacitors 210 for deterioration suppression control.
- the control unit 400 uses the input current I1 to the capacitor 210 detected by the current detection unit 501 so that the value obtained by removing the PWM ripple from the output current I2 matches the input current I1. Add pulsation to 314. That is, the control unit 400 controls the operation of the inverter 310 so that the pulsation according to the detection value of the current detection unit 501 is superimposed on the drive pattern of the motor 314, and suppresses the charge / discharge current I3 of the capacitor 210.
- the control unit 400 controls the q-axis current command i q * of the motor 314 from the relationship between the input / output power of the motor 314 so that the difference between the input current I1 and the output current I2 becomes small.
- the control unit 400 calculates an ideal q-axis current for reducing the charge / discharge current I3 by utilizing the relationship between the input power to the inverter 310 and the mechanical output of the motor 314.
- This control method requires a sensor that detects the input current I1, that is, a current detection unit 501, but since the pulsating waveform of the q-axis current is directly determined using a theoretical formula, it is responsive to changes in the input current I1.
- the control unit 400 controls in the rotating coordinate system having the d-axis and the q-axis.
- the current detection unit 501 detects the current value of the input current I1 to the capacitor 210 and outputs the current value to the control unit 400.
- the control unit 400 controls the inverter 310 so that the value obtained by removing the PWM ripple from the output current I2 from the capacitor 210 to the inverter 310 matches the input current I1, and adds pulsation to the power output to the motor 314.
- the control unit 400 can reduce the charge / discharge current I3 of the capacitor 210 by appropriately pulsating the output current I2.
- the output current I2 and the q-axis current of the motor 314 also contain a component 2n times the power supply frequency. ..
- the AC power supply voltage from the commercial power supply 110 which is the input to the power conversion device 1, is represented by the equation (1).
- V s indicates the amplitude of the AC power supply voltage
- ⁇ in indicates the angular frequency of the AC power supply voltage
- t indicates the time.
- the input current I1 to the capacitor 210 includes a PWM ripple, but it should not be averaged and considered. And.
- the input current I1 is a periodic function
- the input current I1 can be expressed by the equation (2).
- the input current I1 has a waveform that includes many components that are integral multiples of the power supply frequency 2f due to the rectifying unit 130.
- the fundamental wave of the input current I1 is a component of the power supply frequency 2f.
- the "1" part of the input current I1 is subscripted in order to match the notation with the others. The same shall apply thereafter.
- I DC indicates the direct current component of the current, I 2f , I 4f , I 6f , ... Indicates the fundamental and harmonic amplitudes of the current, and ⁇ 2f , ⁇ 4f , ⁇ 6f , ... Shows the fundamental phase and harmonic phase.
- the input current I1 may be used as it is for the control of the control unit 400, or the input current I1 may be filtered and then used for the control of the control unit 400.
- the input current I1 ′ is obtained by extracting the DC component, the fundamental wave component, and the low-order harmonic component of the input current I1 by a low-pass filter and a band-pass filter
- the input current I1 ′ is expressed by, for example, the equation (3).
- the input current I1' is obtained by extracting the DC component, the power supply frequency 2f component, and the power supply frequency 4f component, but a component having a power supply frequency of 6f or more may be added.
- the bandpass filter may be configured by an FIR (Fiinite Impulse Response) filter or an IIR (Infinite Impulse Response) filter. Further, the input current I1'may be calculated from the coefficient calculation formula of the Fourier series expansion.
- the reason why only a specific frequency component is extracted by the above-mentioned filters is to prevent an unintended frequency component from being included in the pulsation given to the motor 314.
- the responsiveness to the change of the input current I1 is lowered, so whether or not to use the filters may be decided depending on the situation. In the following description, it is assumed that the above-mentioned filters are used.
- the output current command I 2 * of the output current I 2 from the capacitor 210 is given as in the equation (4).
- V dc represents the DC bus voltage.
- the active power P mot consumed by the motor 314 is expressed by the dq-axis voltage and the dq-axis current as shown in the equation (6).
- Ra indicates the armature resistance
- L d and L q indicate the dq axis inductance
- ⁇ a indicates the number of dq axis interlinkage magnetic fluxes
- ⁇ e indicates the electric angular velocity.
- the q-axis current pulsation command i qrip * is given as in the equation (9), it is possible to suppress the deterioration of the capacitor 210 of the smoothing portion 200.
- the calculation may be performed as in the equation (10) in consideration of the reluctance torque.
- id * is a d -axis current command.
- P mot Pin is assumed, but the motor 314 is accompanied by losses such as copper loss, iron loss, and mechanical loss. Therefore, the calculation may be performed in consideration of such a loss.
- FIG. 2 is a block diagram showing a configuration example of the control unit 400 included in the power conversion device 1 according to the first embodiment.
- the control unit 400 includes a rotor position estimation unit 401, a speed control unit 402, a weakening magnetic flux control unit 403, a current control unit 404, a coordinate conversion unit 405, 406, a PWM signal generation unit 407, and a q-axis current.
- a pulsation calculation unit 408 and an addition unit 409 are provided.
- the rotor position estimation unit 401 is the direction of the rotor magnetic pole on the dq axis with respect to the rotor (not shown) of the motor 314 from the dq axis voltage command vector V dq * and the dq axis current vector i dq applied to the motor 314.
- the estimated phase angle ⁇ est and the estimated speed ⁇ est are estimated.
- the speed control unit 402 automatically adjusts the q-axis current command i q * so that the speed command ⁇ * and the estimated speed ⁇ est match.
- the speed command ⁇ * is set when the power conversion device 1 is used as an air conditioner or the like as a refrigeration cycle application device, for example, the temperature detected by a temperature sensor (not shown) or a setting instructed by a remote controller which is an operation unit (not shown). It is based on information indicating the temperature, operation mode selection information, operation start and operation end instruction information, and the like.
- the operation mode is, for example, heating, cooling, dehumidification, and the like.
- the weakening magnetic flux control unit 403 automatically adjusts the d -axis current command id * so that the absolute value of the dq-axis voltage command vector V dq * falls within the limit value of the voltage limit value V lim * . Further, in the present embodiment, the weakening magnetic flux control unit 403 performs the weakening magnetic flux control in consideration of the q-axis current pulsation command i qrip * calculated by the q-axis current pulsation calculation unit 408.
- Weak magnetic flux control is roughly divided into a method of calculating the d -axis current command id * from the equation of the voltage limiting ellipse, and the deviation of the absolute value between the voltage limit value V lim * and the dq-axis voltage command vector V dq * is zero.
- the current control unit 404 automatically adjusts the dq-axis voltage command vector V dq * so that the dq-axis current vector i dq follows the d -axis current command id * and the q-axis current command i q * .
- the coordinate conversion unit 405 converts the dq axis voltage command vector V dq * from the dq coordinates to the voltage command V uvw * of the AC amount according to the estimated phase angle ⁇ est .
- the coordinate conversion unit 406 converts the current I uvw flowing through the motor 314 from the alternating current amount into the dq-axis current vector i dq of the dq coordinates according to the estimated phase angle ⁇ est .
- the control unit 400 has the current values of the two phases detected by the current detection units 313a and 313b among the three-phase current values output from the inverter 310 with respect to the current Ivw flowing through the motor 314. It can be obtained by calculating the current value of the remaining one phase using the current value of the two phases.
- the PWM signal generation unit 407 generates a PWM signal based on the voltage command V uvw * coordinate-converted by the coordinate conversion unit 405.
- the control unit 400 applies a voltage to the motor 314 by outputting the PWM signal generated by the PWM signal generation unit 407 to the switching elements 311a to 311f of the inverter 310.
- the q-axis current pulsation calculation unit 408 uses the above-mentioned q-axis current pulsation command i qrip * based on the input current I1, the DC bus voltage V dc , and the estimated speed ⁇ est , which are the current values detected by the current detection unit 501. Is calculated.
- the power conversion device 1 generally includes a detection unit that detects the DC bus voltage Vdc of the capacitor 210 for circuit protection, control reasons, and the like.
- the addition unit 409 adds and adds the q-axis current command i q * output from the speed control unit 402 and the q-axis current pulsation command i qrip * calculated by the q-axis current pulsation calculation unit 408. It is output as a q-axis current command i q * to the current control unit 404.
- the control unit 400 calculates the q-axis current pulsation command i qrip * based on the equation (9) or the equation (10) as compared with the power conversion device that performs the same control as the conventional one, and the q-axis current pulsation command i.
- the difference is that the q-axis current command i q * is calculated using qrip * and the weakening magnetic flux control is performed by adding the q-axis current pulsation command i qrip * .
- Applications such as compressor motors for air conditioning actively utilize weakened magnetic flux control, inverter overmodulation, etc., but in the voltage saturation range where these controls are used, even if pulsation is applied only to the q-axis current, the voltage is insufficient.
- the weakening magnetic flux control unit 403 pulsates the d -axis current id at the same time as the q-axis current pulsation command i qrip * at the time of voltage saturation to prevent the voltage from becoming insufficient.
- FIG. 3 is a diagram showing a configuration example of the q-axis current pulsation calculation unit 408 of the control unit 400 included in the power conversion device 1 according to the first embodiment.
- the q-axis current pulsation calculation unit 408 includes a filter 381 and an amplitude conversion unit 382.
- the filter 381 passes the input current I1 to the capacitor 210 and calculates the output current command I 2 * from the capacitor 210.
- the filter 381 has been described as a combination of a low-pass filter and a band-pass filter, but this configuration is an example, and another type of filter may be used. Further, when the q-axis current pulsation calculation unit 408 places more importance on responsiveness, the filter 381 may be omitted.
- the amplitude conversion unit 382 performs the calculation of equation (9) or equation (10) using the output current command I 2 * from the capacitor 210, the DC bus voltage V dc , and the estimated speed ⁇ est of the motor 314. Calculate the shaft current pulsation command i qrip * . Since the pulsating amplitude of the q-axis current changes depending on the driving conditions of the motor 314, the amplitude conversion unit 382 determines the amplitude in consideration of the driving conditions appropriately.
- the control unit 400 appropriately applies pulsation to the motor 314 by the q-axis current pulsation calculation unit 408, and controls the current flowing through the capacitor 210 to be close to zero or to a small value, so that the current flows into and out of the capacitor 210. That is, the charge / discharge current I3 of the capacitor 210 can be reduced.
- FIG. 4 is a diagram showing an example of a drive waveform in a power conversion device having the same circuit configuration as the power conversion device 1 of the first embodiment as a comparative example. It is assumed that the power conversion device of the comparative example, which is the object of FIG. 4, is not controlled like the power conversion device 1 of the present embodiment.
- FIG. 5 is a diagram showing an example of a drive waveform in the power conversion device 1 according to the first embodiment.
- the upper figure shows the input current I1 from the rectifying unit 130 to the capacitor 210, the output current I2 from the capacitor 210, and the charge / discharge current I3 of the capacitor 210, and the lower figure shows the DC bus voltage Vdc .
- FIGS. 4 and 5 are drawn on the same scale. Further, for convenience of explanation, PWM ripple is not considered in FIGS. 4 and 5.
- the input current I1 flowing into the capacitor 210 has a shape like a “rabbit ear”.
- the charge / discharge current I3 of the capacitor also has the shape of a “rabbit ear”.
- a large ripple occurs in the DC bus voltage Vdc . Since these waveforms have a large periodic pulsation, the deterioration of the capacitor 210 over time is accelerated.
- the control unit 400 controls the operation of the inverter 310 so that the output current I2 from the capacitor 210 is in the shape of a “rabbit ear”, so that the capacitor 210 The peak value of the charge / discharge current I3 becomes smaller. At the same time that the peak value of the charge / discharge current I3 of the capacitor 210 becomes small, the ripple of the DC bus voltage Vdc also becomes small. By reducing the outflow and inflow of the current of the capacitor 210, the deterioration of the element can be suppressed and the aging deterioration of the component can be suppressed.
- the capacity of the element can be reduced by the amount of suppression of the control unit 400 as described above, and the ripple withstand capacity is relaxed. Therefore, an inexpensive smoothing element, that is, a capacitor 210 can be utilized, and the system cost can be suppressed.
- a capacitor 210 In FIG. 5, only the DC component, the power supply frequency 2f component, and the power supply frequency 4f component are extracted to perform deterioration suppression control, but when it is desired to make the charge / discharge current I3 of the capacitor 210 smaller, the order is higher. Ingredients may be added. However, in practice, it is considered necessary and sufficient if the power frequency up to the 6f component is taken into consideration. Further, when it is desired to reduce the amount of calculation, only the DC component and the power supply frequency 2f component may be considered.
- the control method of the control unit 400 is based on the theoretical formula of the input / output power of the motor 314, the q-axis current pulsation of the motor 314 can be directly determined with respect to the change of the input current I1. Highly responsive to changes in the input current I1. Therefore, there is an advantage that deterioration of the capacitor 210 of the smoothing portion 200 can be easily suppressed when used in combination with pulsation load compensation.
- the control method of the first embodiment has a difficulty in robustness as compared with the control method based on the automatic search of the second embodiment and the third embodiment described later. It is clear from Eqs. (9), Eq. (10), etc. that the desired control becomes difficult when the constant fluctuation occurs.
- the control unit 400 in addition to the above-mentioned control, speed pulsation caused by the load torque pulsation. It may be controlled so as to suppress.
- FIG. 6 is a flowchart showing the operation of the control unit 400 included in the power conversion device 1 according to the first embodiment.
- the control unit 400 acquires the input current I1 of the capacitor 210, which is a detected value, from the current detection unit 501 (step S1).
- the control unit 400 controls the operation of the inverter 310 based on the acquired detection value so that the difference between the input current I1 to the capacitor 210 and the output current I2 from the capacitor 210 becomes small (step S2).
- FIG. 7 is a diagram showing an example of a hardware configuration that realizes the control unit 400 included in the power conversion device 1 according to the first embodiment.
- the control unit 400 is realized by the processor 91 and the memory 92.
- the processor 91 is a CPU (Central Processing Unit, central processing unit, processing unit, arithmetic unit, microprocessor, microprocessor, processor, DSP (Digital Signal Processor)), or system LSI (Large Scale Integration).
- the memory 92 is a RAM (Random Access Memory), a ROM (Read Only Memory), a flash memory, an EPROM (Erasable Programmable Read Only Memory), an EPROM (registered trademark) (Electrically Memory)
- a semiconductor memory can be exemplified. Further, the memory 92 is not limited to these, and may be a magnetic disk, an optical disk, a compact disk, a mini disk, or a DVD (Digital Versaille Disc).
- the control unit 400 uses the input current I1 to the capacitor 210 detected by the current detection unit 501 to generate the q-axis current pulsation command i. It was decided to calculate qrip * and generate d -axis current command id * using the q-axis current pulsation command i qrip * to control the operation of the inverter 310 and suppress the charge / discharge current I3 of the capacitor 210. As a result, the power conversion device 1 can suppress the deterioration of the smoothing capacitor 210 while suppressing the increase in size of the power conversion device 1.
- Embodiment 2 in the power conversion device, the motor 314 that detects the charge / discharge current I3 flowing through the capacitor 210 and reduces the peak value of the charge / discharge current I3 or a specific frequency component contained in the charge / discharge current I3.
- the drive pattern including the pulsation of the electric current is automatically searched.
- the famous automatic search method is, for example, the mountain climbing method, but any method may be used as long as it is an automatic search method.
- feedback control is also considered to be a kind of automatic search method, so the feedback control technique may be used.
- the control method of the second embodiment requires a sensor for detecting the charge / discharge current I3, which is difficult in terms of cost.
- it is robust even when the constant fluctuation of the motor 314 occurs. It is possible to suppress deterioration.
- the control that minimizes the charge / discharge current I3 by utilizing the feedback control will be described.
- the control method described here automatically searches for a drive pattern including the pulsation of the motor 314 that minimizes the charge / discharge current I3.
- FIG. 8 is a diagram showing a configuration example of the power conversion device 1a according to the second embodiment.
- the power conversion device 1a is the power conversion device 1 of the first embodiment shown in FIG. 1, in which the control unit 400 and the current detection unit 501 are deleted, and the control unit 400a and the current detection unit 502 are added. be.
- the motor drive device 2a is composed of the power conversion device 1a and the motor 314 included in the compressor 315.
- the current detection unit 502 detects the charge / discharge current I3 of the capacitor 210 and outputs the detected current value to the control unit 400a.
- the current detection unit 502 is a detection unit that detects the power state of the capacitor 210.
- control unit 400a is obtained by deleting the q-axis current pulsation calculation unit 408 and adding the q-axis current pulsation calculation unit 408a to the control unit 400 of the first embodiment shown in FIG.
- FIG. 10 is a diagram showing a configuration example of the q-axis current pulsation calculation unit 408a of the control unit 400a included in the power conversion device 1a according to the second embodiment.
- the q-axis current pulsation calculation unit 408a is configured as a feedback controller with the command value set to zero. Normally, the feedback controller has a lower control response than the feedforward controller and is not suitable for suppressing high frequency pulsation, but various high frequency pulsation suppressing means have been proposed in the past.
- As a well-known method there is a method using a Fourier coefficient calculation and a PID (Proportional Integral Differential) controller.
- the q-axis current pulsation calculation unit 408a includes a subtraction unit 383, a Fourier coefficient calculation unit 384 to 387, a PID control unit 388 to 391, and an AC restoration unit 392.
- the Fourier coefficient calculation units 384 to 387 calculate the amplitudes of the sin2f component, the cos2f component, the sin4f component, and the cos4f component included in the deviation, assuming that the power frequency is the 1f component.
- the detection signals multiplied by the Fourier coefficient calculation units 384 to 387 are sin2 ⁇ int , cos2 ⁇ int , sin4 ⁇ int , and cos4 ⁇ int , respectively, and the deviation includes twice the average value of the product of the input signal and the detection signal, respectively. It is the amplitude of the sin2f component, the cos2f component, the sin4f component, and the cos4f component. That is, the Fourier coefficient calculation units 384 to 387 calculate the amplitude of the component corresponding to the power supply frequency of the commercial power supply 110 included in the deviation between the detected value and the command value. If the charge / discharge current I3 of the capacitor 210 is a periodic waveform, the output signals of the Fourier coefficient calculation units 384 to 387 are substantially constant.
- the PID control units 388 to 391 carry out proportional-integral-differential control, that is, PID control so that the specific frequency components of these deviations become zero.
- the proportional gain and derivative gain can be zero, but the integrated gain value must be non-zero in order for the deviation to converge to zero. Therefore, in the PID control units 388 to 391, the integration operation is the main operation. Normally, since the output of the integral control changes slowly, the output of the PID control units 388 to 391 can also be regarded as being substantially constant.
- the AC restoration unit 392 multiplies the outputs of the PID control units 388 to 391 with sin2 ⁇ int , cos2 ⁇ int , sin4 ⁇ int , and cos4 ⁇ int , respectively, and then adds them up to restore the q-axis current pulsation command i qrip. * Determine. That is, the AC restoration unit 392 generates the q-axis current pulsation command i qrip * , which is a command for the pulsation for suppressing the charge / discharge current I3 of the capacitor 210.
- the problem of robustness which is a drawback of the control method of the first embodiment, is improved.
- the control response cannot be increased because the PID control is mainly used for the integral operation.
- a sensor for detecting the charge / discharge current I3, that is, a current detection unit 502 is required, there is a problem in terms of cost.
- the control methods of each embodiment may be freely combined and used, including the control method of the third embodiment described later.
- the case where the sensorless vector control method is used has been illustrated, but it can also be applied to the constant primary magnetic flux control by adding a pulsation to the speed command, the voltage command, etc. by adding some deformation. ..
- an appropriate phase offset may be given to the trigonometric function for AC restoration to be multiplied.
- the motor 314 is a permanent magnet synchronous motor
- the current vector and the voltage vector in the steady state have a phase difference of about several tens of degrees. If it is added to the command, the same control is possible even with constant primary magnetic flux control.
- FIG. 11 is a flowchart showing the operation of the control unit 400a included in the power conversion device 1a according to the second embodiment.
- the control unit 400a acquires the charge / discharge current I3 of the capacitor 210, which is a detected value, from the current detection unit 502 (step S11).
- the control unit 400a controls the operation of the inverter 310 so that the specific frequency component included in the charge / discharge current I3 of the capacitor 210 is reduced based on the acquired detected value (step S12).
- the control unit 400a determines the drive pattern of the motor 314 in which the pulsation component of a specific frequency included in the charge / discharge current I3 of the capacitor 210 is reduced. It was decided to suppress the charge / discharge current I3 of the capacitor 210 by automatically searching and controlling the operation of the inverter 310. As a result, the power conversion device 1a can suppress the deterioration of the smoothing capacitor 210 and the increase in size of the power conversion device 1a.
- Embodiment 3 in the power conversion device, the DC bus voltage V dc , which is the voltage across the capacitor 210, is detected, and the drive pattern including the pulsation of the motor 314 such that the pulsation width of the DC bus voltage V dc is reduced is automatically performed.
- the DC bus voltage V dc which is the voltage across the capacitor 210
- the power conversion device generally detects the DC bus voltage Vdc of the capacitor 210 by the voltage detection unit. Therefore, the control method of the third embodiment is the embodiment. Unlike the control method of 1 and 2, it is not necessary to add a current detection unit. The control method of the third embodiment is superior in terms of cost as compared with the control method of the first embodiment and the second embodiment.
- any method may be used as long as it is an automatic search method.
- feedback control is also considered to be a kind of automatic search method, so the feedback control technique may be used.
- the control method based on the automatic search can robustly suppress deterioration even when the constant fluctuation of the motor 314 occurs.
- the control for reducing the pulsation width of the DC bus voltage Vdc using the feedback control will be described.
- the control method described here automatically searches for a drive pattern including the pulsation of the motor 314 in which the pulsation width of the DC bus voltage Vdc decreases.
- FIG. 12 is a diagram showing a configuration example of the power conversion device 1b according to the third embodiment.
- the power conversion device 1b is the power conversion device 1 of the first embodiment shown in FIG. 1, in which the control unit 400 and the current detection unit 501 are deleted, and the control unit 400b and the voltage detection unit 503 are added. be.
- the motor drive device 2b is composed of the power conversion device 1b and the motor 314 included in the compressor 315.
- the voltage detection unit 503 detects the DC bus voltage Vdc , which is the voltage across the capacitor 210, and outputs the detected voltage value to the control unit 400b.
- the voltage detection unit 503 is a detection unit that detects the power state of the capacitor 210.
- the power conversion device generally detects the DC bus voltage V dc of the capacitor 210 for reasons of circuit protection, control, and the like. It has a configuration, that is, a detection unit corresponding to the voltage detection unit 503 of the present embodiment.
- FIG. 13 is a block diagram showing a configuration example of the control unit 400b included in the power conversion device 1b according to the third embodiment.
- the control unit 400b deletes the q-axis current pulsation calculation unit 408 and adds the q-axis current pulsation calculation unit 408b to the control unit 400 of the first embodiment shown in FIG. In the q-axis current pulsation calculation unit 408a of the second embodiment shown in FIG.
- FIG. 14 is a diagram showing a configuration example of the q-axis current pulsation calculation unit 408b of the control unit 400b included in the power conversion device 1b according to the third embodiment.
- the q-axis current pulsation calculation unit 408b is configured as a feedback controller with a target value of zero.
- the q-axis current pulsation calculation unit 408b includes a subtraction unit 383, a Fourier coefficient calculation unit 384 to 387, a PID control unit 388 to 391, and an AC restoration unit 392b.
- the Fourier coefficient calculation units 384 to 387 calculate the amplitudes of the sin2f component, the cos2f component, the sin4f component, and the cos4f component included in the deviation, assuming that the power frequency is the 1f component. That is, the Fourier coefficient calculation units 384 to 387 calculate the amplitude of the component corresponding to the power supply frequency of the commercial power supply 110 included in the deviation between the detected value and the target value.
- the PID control units 388 to 391 carry out proportional-integral-differential control, that is, PID control so that the specific frequency components of these deviations become zero.
- the proportional gain and derivative gain can be zero, but the integrated gain value must be non-zero in order for the deviation to converge to zero. Therefore, in the PID control units 388 to 391, the integration operation is the main operation. Normally, since the output of the integral control changes slowly, the output of the PID control units 388 to 391 can also be regarded as being substantially constant. Regarding the Fourier coefficient calculation units 384 to 387 and the PID control units 388 to 391, the calculation contents are almost the same as those in the second embodiment except that the input values are different.
- the AC restoration unit 392b integrates the charge / discharge current I3 of the capacitor 210.
- the AC restoration unit 392b must determine the q-axis current pulsation command i qrip * in consideration of the phase difference of 90 degrees.
- the AC restoration unit 392b performs the restoration operation as follows. In this way, the AC restoration unit 392b generates the q-axis current pulsation command i qrip * , which is a command for the pulsation for suppressing the charge / discharge current I3 of the capacitor 210.
- the restoration signals in the AC restoration unit 392b are sin2 ( ⁇ int + ⁇ offset ) and cos2. ( ⁇ int + ⁇ offset ), sin4 ( ⁇ int + ⁇ offset ), and cos4 ( ⁇ int + ⁇ offset ).
- the q-axis current pulsation calculation unit 408a of the second embodiment shown in FIG. 10 may use the same detection signal and restoration signal, but the q-axis current pulsation calculation unit 408b of the third embodiment shown in FIG. 14 may use the same detection signal and restoration signal.
- the AC restoration unit 392b can determine the q-axis current pulsation command i qrip * by calculating the sum of products of the outputs of the PID control units 388 to 391 and the restoration signal.
- the control method of each embodiment by using such a control method, it is advantageous in terms of cost as compared with the first embodiment and the second embodiment. Further, in the third embodiment, by using such a control method, the problem of robustness, which is a drawback of the control method of the first embodiment, is improved. On the other hand, the control response cannot be increased because the PID control is mainly used for the integral operation. As described above, in order to compensate for the weaknesses of the control methods of each embodiment, the control methods of each embodiment may be freely combined and used, including the control method of the fourth embodiment described later.
- FIG. 15 is a flowchart showing the operation of the control unit 400b included in the power conversion device 1b according to the third embodiment.
- the control unit 400b acquires the DC bus voltage V dc , which is the voltage across the capacitor 210, which is the detected value, from the voltage detection unit 503 (step S21).
- the control unit 400b controls the operation of the inverter 310 so that the specific pulsation width included in the DC bus voltage Vdc is reduced based on the acquired detected value (step S22).
- the control unit 400b automatically searches for the drive pattern of the motor 314 in which the pulsation component of a specific frequency included in the DC bus voltage Vdc is reduced.
- the charge / discharge current I3 of the capacitor 210 is suppressed.
- the power conversion device 1b can suppress the deterioration of the smoothing capacitor 210 while suppressing the increase in size of the power conversion device 1b.
- Embodiment 4 a method of determining a drive pattern including a pulsation of the q-axis current in which the charge / discharge current I3 of the capacitor 210 decreases during driving of the motor 314 has been described. However, if the drive pattern including the pulsation of the q-axis current in which the charge / discharge current I3 of the capacitor 210 decreases is known, deterioration suppression control may be performed based on the known data.
- a method is conceivable in which a pulsation pattern representing the pulsation of the q-axis current in which the charge / discharge current I3 of the capacitor 210 decreases is investigated in advance, and deterioration suppression control is performed based on the pre-learned data.
- the pulsation pattern of the motor 314 in which the pulsation of the charge / discharge current I3 or the DC bus voltage Vdc is reduced is investigated in advance, and the pulsation is given to the motor 314 using the data investigated in advance.
- the data investigated in advance is stored in a storage unit in the power conversion device, and an appropriate pulsation pattern is selected according to the driving conditions of the motor 314.
- FIG. 16 is a block diagram showing a configuration example of the control unit 400c included in the power conversion device according to the fourth embodiment.
- the power conversion device including the control unit 400c may have the same circuit configuration as the power conversion devices 1 to 1b described in the first to third embodiments, or may be individually provided in each embodiment.
- the circuit configuration may not include the detection unit.
- the control unit 400c is obtained by deleting the q-axis current pulsation calculation unit 408 and adding the q-axis current pulsation calculation unit 408c to the control unit 400 of the first embodiment shown in FIG.
- the q-axis current pulsation calculation unit 408c includes a storage unit (not shown) and a pulsation pattern generation unit.
- the storage unit stores a pulsation pattern of the motor 314 in which the charge / discharge current I3 of the capacitor 210 is reduced.
- the pulsation pattern data stored in the storage unit was obtained by a preliminary survey.
- a certain pulsation pattern may be applied by trial and error to investigate a pattern in which the pulsation of the charge / discharge current I3 or the DC bus voltage Vdc decreases, or the investigation is performed using the above-mentioned automatic search method. It doesn't matter.
- the survey may be conducted through an actual machine test or a computer simulation. In recent years, machine learning and AI (Artificial Intelligence) techniques have become common, and such techniques may be used.
- AI Artificial Intelligence
- the control unit 400c automatically searches for a pulsation pattern in which the pulsation component of a specific frequency included in the charge / discharge current I3 detected by the current detection unit 502 decreases, and controls the control.
- the pulsation pattern obtained in the process may be stored as a pulsation pattern set for each operating condition.
- the control unit 400c automatically searches for a pulsation pattern in which the pulsation component of a specific frequency included in the DC bus voltage Vdc detected by the voltage detection unit 503 decreases.
- the pulsation pattern obtained in the control process may be stored as a pulsation pattern set for each operating condition.
- the pulsation pattern data stored in the storage unit is associated with the operating conditions of the motor 314.
- the suction pressure, the discharge pressure, the temperature of the refrigerant, the target value of the room temperature of the air conditioner, and the like of the compressor 315 correspond to the operating conditions.
- the q-axis current pulsation calculation unit 408c selects an appropriate pulsation pattern from the storage unit for reducing the charge / discharge current I3 of the capacitor 210 according to such operating conditions.
- the q-axis current pulsation calculation unit 408c uses the pulsation pattern generation unit to generate the q-axis current pulsation command i qrip * based on the pulsation pattern selected from the storage unit.
- the q-axis current pulsation calculation unit 408c performs deterioration suppression control of the capacitor 210 by such control.
- control method based on the preliminary survey has the disadvantages of having difficulty in robustness and requiring a storage unit having a large capacity, but the calculation process itself is simple. Therefore, when the calculation performance of the computer is poor and the number of operating conditions is very small, the control method as in the fourth embodiment may be an effective means. In order to reduce the complexity of the preliminary survey, the control methods described in the first to fourth embodiments may be freely combined.
- FIG. 17 is a flowchart showing the operation of the control unit 400c included in the power conversion device according to the fourth embodiment.
- the control unit 400c acquires the operating conditions of the compressor 315 (step S31).
- the control unit 400c selects an appropriate pulsation pattern for reducing the charge / discharge current I3 of the capacitor 210 based on the acquired operating conditions, and controls the operation of the inverter 310 (step S32).
- the control unit 400c stores the pulsation pattern for suppressing the charge / discharge current I3 of the capacitor 210 set for each operating condition of the load including the motor 314.
- the q-axis current pulsation command i qrip * which is the command for the pulsation to suppress the charge / discharge current I3 of the capacitor 210, is generated, and the inverter 310 Control the operation. Also in this case, the same effects as those of the first to third embodiments can be obtained.
- FIG. 18 is a diagram showing a configuration example of the refrigeration cycle application device 900 according to the fifth embodiment.
- the refrigeration cycle application device 900 according to the fifth embodiment includes the power conversion device 1 described in the first embodiment.
- the refrigeration cycle application device 900 may include the power conversion devices 1a and 1b described in other embodiments, but here, as an example, a case where the power conversion device 1 is provided will be described.
- the refrigerating cycle applicable device 900 according to the fifth embodiment can be applied to products including a refrigerating cycle such as an air conditioner, a refrigerator, a freezer, and a heat pump water heater.
- the components having the same functions as those of the first embodiment are designated by the same reference numerals as those of the first embodiment.
- the compressor 315 having a built-in motor 314, the four-way valve 902, the indoor heat exchanger 906, the expansion valve 908, and the outdoor heat exchanger 910 form the refrigerant pipe 912 according to the first embodiment. It is attached via.
- a compression mechanism 904 for compressing the refrigerant and a motor 314 for operating the compression mechanism 904 are provided inside the compressor 315.
- the refrigeration cycle applicable device 900 can perform heating operation or cooling operation by switching operation of the four-way valve 902.
- the compression mechanism 904 is driven by a variable speed controlled motor 314.
- the refrigerant is pressurized by the compression mechanism 904 and sent out, and passes through the four-way valve 902, the indoor heat exchanger 906, the expansion valve 908, the outdoor heat exchanger 910 and the four-way valve 902. Return to the compression mechanism 904.
- the refrigerant is pressurized by the compression mechanism 904 and sent out, and passes through the four-way valve 902, the outdoor heat exchanger 910, the expansion valve 908, the indoor heat exchanger 906 and the four-way valve 902. Return to the compression mechanism 904.
- the indoor heat exchanger 906 acts as a condenser to release heat, and the outdoor heat exchanger 910 acts as an evaporator to absorb heat.
- the outdoor heat exchanger 910 acts as a condenser to release heat, and the indoor heat exchanger 906 acts as an evaporator to absorb heat.
- the expansion valve 908 depressurizes the refrigerant and expands it.
- the configuration shown in the above embodiments is an example, and can be combined with another known technique, can be combined with each other, and does not deviate from the gist. It is also possible to omit or change a part of the configuration.
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Control Of Ac Motors In General (AREA)
- Inverter Devices (AREA)
Abstract
This power conversion device (1) comprises: a rectifying unit (130) for rectifying a first AC power supplied from a commercial power supply (110); a capacitor (210) connected to the output ends of the rectifying unit (130); an inverter (310) connected to both ends of the capacitor (210) and generating a second AC power which is output to a motor (314); a detection unit for detecting the power state of the capacitor (210); and a control unit (400) for controlling the operation of the inverter (310) so that a ripple corresponding to a detection value of the detection unit is superimposed on a drive pattern of the motor (314) and suppressing the charge/discharge current of the capacitor (210).
Description
本開示は、交流電力を所望の電力に変換する電力変換装置、モータ駆動装置および冷凍サイクル適用機器に関する。
The present disclosure relates to a power conversion device, a motor drive device, and a refrigeration cycle applicable device for converting AC power into desired power.
従来、交流電源から供給される交流電力を所望の交流電力に変換し、空気調和機などの負荷に供給する電力変換装置がある。例えば、特許文献1には、空気調和機の制御装置である電力変換装置が、交流電源から供給される交流電力を整流部であるダイオードスタックで整流し、さらに平滑コンデンサで平滑した電力を、複数のスイッチング素子からなるインバータで所望の交流電力に変換し、負荷である圧縮機モータに出力する技術が開示されている。
Conventionally, there is a power conversion device that converts AC power supplied from an AC power source into desired AC power and supplies it to a load such as an air conditioner. For example, in Patent Document 1, a power conversion device, which is a control device for an air conditioner, rectifies AC power supplied from an AC power supply by a diode stack, which is a rectifying unit, and further smoothes a plurality of powers by a smoothing capacitor. There is disclosed a technique of converting the AC power into desired AC power by an inverter including a switching element of the above and outputting it to a compressor motor which is a load.
しかしながら、上記従来の技術によれば、平滑コンデンサに大きな電流が流れるため、平滑コンデンサの経年劣化が加速する、という問題があった。このような問題に対して、平滑コンデンサの容量を大きくすることでコンデンサ電圧のリプル変化を抑制する、またはリプルによる劣化耐量の大きい平滑コンデンサを使用する方法が考えられるが、コンデンサ部品のコストが高くなり、また装置が大型化してしまう。
However, according to the above-mentioned conventional technique, there is a problem that aged deterioration of the smoothing capacitor is accelerated because a large current flows through the smoothing capacitor. To solve this problem, it is conceivable to suppress the ripple change of the capacitor voltage by increasing the capacity of the smoothing capacitor, or to use a smoothing capacitor with a large deterioration tolerance due to ripple, but the cost of capacitor parts is high. In addition, the size of the device becomes large.
本開示は、上記に鑑みてなされたものであって、平滑用のコンデンサの劣化を抑制しつつ、装置の大型化を抑制可能な電力変換装置を得ることを目的とする。
The present disclosure has been made in view of the above, and an object of the present disclosure is to obtain a power conversion device capable of suppressing the increase in size of the device while suppressing the deterioration of the smoothing capacitor.
上述した課題を解決し、目的を達成するために、本開示に係る電力変換装置は、商用電源から供給される第1の交流電力を整流する整流部と、整流部の出力端に接続されるコンデンサと、コンデンサの両端に接続され、第2の交流電力を生成してモータに出力するインバータと、コンデンサの電力状態を検出する検出部と、検出部の検出値に応じた脈動がモータの駆動パターンに重畳されるようにインバータの動作を制御し、コンデンサの充放電電流を抑制する制御部と、を備える。
In order to solve the above-mentioned problems and achieve the object, the power conversion device according to the present disclosure is connected to a rectifying unit that rectifies a first AC power supplied from a commercial power source and an output end of the rectifying unit. A capacitor, an inverter connected to both ends of the capacitor to generate a second AC power and output it to the motor, a detector that detects the power state of the capacitor, and a pulsation according to the detection value of the detector drives the motor. It is provided with a control unit that controls the operation of the inverter so as to be superimposed on the pattern and suppresses the charge / discharge current of the capacitor.
本開示に係る電力変換装置は、平滑用のコンデンサの劣化を抑制しつつ、装置の大型化を抑制できる、という効果を奏する。
The power conversion device according to the present disclosure has the effect of suppressing the deterioration of the smoothing capacitor and suppressing the increase in size of the device.
以下に、本開示の実施の形態に係る電力変換装置、モータ駆動装置および冷凍サイクル適用機器を図面に基づいて詳細に説明する。
Hereinafter, the power conversion device, the motor drive device, and the refrigeration cycle applicable device according to the embodiment of the present disclosure will be described in detail with reference to the drawings.
実施の形態1.
図1は、実施の形態1に係る電力変換装置1の構成例を示す図である。電力変換装置1は、商用電源110および圧縮機315に接続される。電力変換装置1は、商用電源110から供給される電源電圧Vsの第1の交流電力を所望の振幅および位相を有する第2の交流電力に変換し、圧縮機315に供給する。電力変換装置1は、リアクトル120と、整流部130と、電流検出部501と、平滑部200と、インバータ310と、電流検出部313a,313bと、制御部400と、を備える。なお、電力変換装置1、および圧縮機315が備えるモータ314によって、モータ駆動装置2を構成している。 Embodiment 1.
FIG. 1 is a diagram showing a configuration example of the power conversion device 1 according to the first embodiment. The power converter 1 is connected to thecommercial power supply 110 and the compressor 315. The power conversion device 1 converts the first AC power of the power supply voltage Vs supplied from the commercial power supply 110 into the second AC power having a desired amplitude and phase, and supplies the first AC power to the compressor 315. The power conversion device 1 includes a reactor 120, a rectifying unit 130, a current detecting unit 501, a smoothing unit 200, an inverter 310, current detecting units 313a and 313b, and a control unit 400. The motor drive device 2 is composed of the power converter 1 and the motor 314 included in the compressor 315.
図1は、実施の形態1に係る電力変換装置1の構成例を示す図である。電力変換装置1は、商用電源110および圧縮機315に接続される。電力変換装置1は、商用電源110から供給される電源電圧Vsの第1の交流電力を所望の振幅および位相を有する第2の交流電力に変換し、圧縮機315に供給する。電力変換装置1は、リアクトル120と、整流部130と、電流検出部501と、平滑部200と、インバータ310と、電流検出部313a,313bと、制御部400と、を備える。なお、電力変換装置1、および圧縮機315が備えるモータ314によって、モータ駆動装置2を構成している。 Embodiment 1.
FIG. 1 is a diagram showing a configuration example of the power conversion device 1 according to the first embodiment. The power converter 1 is connected to the
リアクトル120は、商用電源110と整流部130との間に接続される。整流部130は、整流素子131~134によって構成されるブリッジ回路を有し、商用電源110から供給される電源電圧Vsの第1の交流電力を整流して出力する。整流部130は、全波整流を行うものである。電流検出部501は、整流部130によって整流され、整流部130から平滑部200に流入される電流、すなわち平滑部200への入力電流を検出し、検出した電流値を制御部400に出力する。電流検出部501は、コンデンサ210の電力状態を検出する検出部である。
The reactor 120 is connected between the commercial power supply 110 and the rectifying unit 130. The rectifying unit 130 has a bridge circuit composed of rectifying elements 131 to 134, and rectifies and outputs the first AC power of the power supply voltage Vs supplied from the commercial power supply 110. The rectifying unit 130 performs full-wave rectification. The current detection unit 501 detects the current rectified by the rectifying unit 130 and flows into the smoothing unit 200 from the rectifying unit 130, that is, the input current to the smoothing unit 200, and outputs the detected current value to the control unit 400. The current detection unit 501 is a detection unit that detects the power state of the capacitor 210.
平滑部200は、整流部130の出力端に接続される。平滑部200は、平滑素子としてコンデンサ210を有し、整流部130によって整流された電力を平滑化する。コンデンサ210は、例えば、電解コンデンサ、フィルムコンデンサなどである。コンデンサ210は、整流部130の出力端に接続され、整流部130によって整流された電力を平滑化するような容量を有し、平滑化によりコンデンサ210に発生する電圧は商用電源110の全波整流波形形状ではなく、直流成分に商用電源110の周波数に応じた電圧リプルが重畳した波形形状となり、大きく脈動しない。この電圧リプルの周波数は、商用電源110が単相の場合は電源電圧Vsの周波数の2倍成分となり、商用電源110が三相の場合は6倍成分が主成分となる。商用電源110から入力される電力とインバータ310から出力される電力が変化しない場合、この電圧リプルの振幅はコンデンサ210の容量によって決まる。例えば、コンデンサ210に発生する電圧リプルの最大値が最小値の2倍未満となるような範囲で脈動している。
The smoothing unit 200 is connected to the output end of the rectifying unit 130. The smoothing unit 200 has a capacitor 210 as a smoothing element, and smoothes the electric power rectified by the rectifying unit 130. The capacitor 210 is, for example, an electrolytic capacitor, a film capacitor, or the like. The capacitor 210 is connected to the output end of the rectifying unit 130 and has a capacity for smoothing the power rectified by the rectifying unit 130, and the voltage generated in the capacitor 210 by the smoothing is full-wave rectification of the commercial power supply 110. It is not a waveform shape, but a waveform shape in which a voltage ripple corresponding to the frequency of the commercial power supply 110 is superimposed on a DC component, and does not pulsate significantly. The frequency of this voltage ripple is twice the frequency of the power supply voltage Vs when the commercial power supply 110 is single-phase, and is mainly composed of six times the frequency when the commercial power supply 110 is three-phase. When the power input from the commercial power supply 110 and the power output from the inverter 310 do not change, the amplitude of this voltage ripple is determined by the capacity of the capacitor 210. For example, the voltage ripple generated in the capacitor 210 is pulsating in a range where the maximum value is less than twice the minimum value.
インバータ310は、平滑部200、すなわちコンデンサ210の両端に接続される。インバータ310は、スイッチング素子311a~311f、および還流ダイオード312a~312fを有する。インバータ310は、制御部400の制御によってスイッチング素子311a~311fをオンオフし、整流部130および平滑部200から出力される電力を所望の振幅および位相を有する第2の交流電力に変換、すなわち第2の交流電力を生成して、圧縮機315に出力する。電流検出部313a,313bは、各々、インバータ310から出力される3相の電流のうち1相の電流値を検出し、検出した電流値を制御部400に出力する。なお、制御部400は、インバータ310から出力される3相の電流値のうち2相の電流値を取得することで、インバータ310から出力される残りの1相の電流値を算出することができる。圧縮機315は、圧縮機駆動用のモータ314を有する負荷である。モータ314は、インバータ310から供給される第2の交流電力の振幅および位相に応じて回転し、圧縮動作を行う。例えば、圧縮機315が空気調和機などで使用される密閉型圧縮機の場合、圧縮機315の負荷トルクは定トルク負荷とみなせる場合が多い。モータ314について、図1ではモータ巻線がY結線の場合を示しているが、一例であり、これに限定されない。モータ314のモータ巻線は、Δ結線であってもよいし、Y結線とΔ結線とが切り替え可能な仕様であってもよい。
The inverter 310 is connected to the smoothing portion 200, that is, both ends of the capacitor 210. The inverter 310 has switching elements 311a to 311f and freewheeling diodes 312a to 312f. The inverter 310 turns on and off the switching elements 311a to 311f under the control of the control unit 400, and converts the power output from the rectifying unit 130 and the smoothing unit 200 into a second AC power having a desired amplitude and phase, that is, a second AC power. AC power is generated and output to the compressor 315. The current detection units 313a and 313b each detect the current value of one of the three-phase currents output from the inverter 310, and output the detected current value to the control unit 400. The control unit 400 can calculate the current value of the remaining one phase output from the inverter 310 by acquiring the current value of two phases out of the current values of the three phases output from the inverter 310. .. The compressor 315 is a load having a motor 314 for driving the compressor. The motor 314 rotates according to the amplitude and phase of the second AC power supplied from the inverter 310, and performs a compression operation. For example, when the compressor 315 is a closed type compressor used in an air conditioner or the like, the load torque of the compressor 315 can often be regarded as a constant torque load. Regarding the motor 314, FIG. 1 shows a case where the motor winding is Y-connected, but this is an example and is not limited thereto. The motor winding of the motor 314 may have a Δ connection or a specification in which the Y connection and the Δ connection can be switched.
なお、電力変換装置1において、図1に示す各構成の配置は一例であり、各構成の配置は図1で示される例に限定されない。例えば、リアクトル120は、整流部130の後段に配置されてもよい。また、電力変換装置1は、昇圧部を備えてもよいし、整流部130に昇圧部の機能を持たせるようにしてもよい。以降の説明において、電流検出部501、および電流検出部313a,313bをまとめて検出部と称することがある。また、電流検出部501で検出された電流値、および電流検出部313a,313bで検出された電流値を、検出値と称することがある。
In the power conversion device 1, the arrangement of each configuration shown in FIG. 1 is an example, and the arrangement of each configuration is not limited to the example shown in FIG. For example, the reactor 120 may be arranged after the rectifying unit 130. Further, the power conversion device 1 may be provided with a boosting unit, or the rectifying unit 130 may be provided with the function of a boosting unit. In the following description, the current detection unit 501 and the current detection units 313a and 313b may be collectively referred to as a detection unit. Further, the current value detected by the current detection unit 501 and the current value detected by the current detection units 313a and 313b may be referred to as a detection value.
制御部400は、電流検出部501から平滑部200の入力電流の電流値を取得し、電流検出部313a,313bからインバータ310によって変換された所望の振幅および位相を有する第2の交流電力の電流値を取得する。制御部400は、各検出部によって検出された検出値を用いて、インバータ310の動作、具体的には、インバータ310が有するスイッチング素子311a~311fのオンオフを制御する。本実施の形態において、制御部400は、整流部130から平滑部200のコンデンサ210に流入する電力の脈動に応じた脈動を含む第2の交流電力をインバータ310から負荷である圧縮機315に出力するようにインバータ310の動作を制御する。平滑部200のコンデンサ210に流入する電力の脈動に応じた脈動とは、例えば、平滑部200のコンデンサ210に流入する電力の脈動の周波数などによって変動する脈動である。これにより、制御部400は、平滑部200のコンデンサ210に流れる電流を抑制する。なお、制御部400は、各検出部から取得した全ての検出値を用いなくてもよく、一部の検出値を用いて制御を行ってもよい。
The control unit 400 acquires the current value of the input current of the smoothing unit 200 from the current detection unit 501, and the current of the second AC power having a desired amplitude and phase converted from the current detection units 313a and 313b by the inverter 310. Get the value. The control unit 400 controls the operation of the inverter 310, specifically, the on / off of the switching elements 311a to 311f of the inverter 310 by using the detection value detected by each detection unit. In the present embodiment, the control unit 400 outputs a second AC power including a pulsation corresponding to the pulsation of the electric power flowing from the rectifying unit 130 to the capacitor 210 of the smoothing unit 200 from the inverter 310 to the compressor 315 which is a load. The operation of the inverter 310 is controlled so as to be performed. The pulsation according to the pulsation of the electric power flowing into the capacitor 210 of the smoothing portion 200 is, for example, a pulsation that fluctuates depending on the frequency of the pulsation of the electric power flowing into the capacitor 210 of the smoothing portion 200. As a result, the control unit 400 suppresses the current flowing through the capacitor 210 of the smoothing unit 200. The control unit 400 does not have to use all the detected values acquired from each detection unit, and may perform control using some of the detected values.
制御部400は、モータ314の速度、電圧、電流のいずれかが所望の状態になるように制御を行う。ここで、モータ314が圧縮機315の駆動用に使用され、圧縮機315が密閉型圧縮機の場合、モータ314に回転子位置を検出する位置センサを取り付けることが構造的にもコスト的にも難しいので、制御部400は、モータ314の制御を位置センサレスで行う。モータ314の位置センサレス制御方法については、一次磁束一定制御、およびセンサレスベクトル制御の2種類がある。本実施の形態では、一例として、センサレスベクトル制御をベースに説明する。なお、以降で説明する制御方法については、軽微な変更で一次磁束一定制御に適用することも可能である。
The control unit 400 controls so that any one of the speed, voltage, and current of the motor 314 is in a desired state. Here, when the motor 314 is used for driving the compressor 315 and the compressor 315 is a closed type compressor, it is structurally and cost-wise to attach a position sensor for detecting the rotor position to the motor 314. Since it is difficult, the control unit 400 controls the motor 314 without a position sensor. There are two types of position sensorless control methods for the motor 314: primary magnetic flux constant control and sensorless vector control. In this embodiment, as an example, a sensorless vector control will be described as a base. The control method described below can also be applied to the constant primary magnetic flux control with minor changes.
つづいて、制御部400における本実施の形態での特徴的な動作について説明する。図1に示すように、電力変換装置1において、整流部130から平滑部200のコンデンサ210への入力電流を入力電流I1とし、平滑部200のコンデンサ210からインバータ310への出力電流を出力電流I2とし、平滑部200のコンデンサ210の充放電電流を充放電電流I3とする。入力電流I1は、商用電源110の電源位相、整流部130の前後に設置される素子の特性などの影響は受けるものの、基本的に電源周波数の2n倍成分を含む特性を有する。なお、nは1以上の整数である。
Next, the characteristic operation of the control unit 400 in the present embodiment will be described. As shown in FIG. 1, in the power conversion device 1, the input current from the rectifying unit 130 to the capacitor 210 of the smoothing unit 200 is the input current I1, and the output current from the capacitor 210 of the smoothing unit 200 to the inverter 310 is the output current I2. Let the charge / discharge current of the capacitor 210 of the smoothing portion 200 be the charge / discharge current I3. Although the input current I1 is affected by the power supply phase of the commercial power supply 110, the characteristics of the elements installed before and after the rectifying unit 130, and the like, it basically has a characteristic of including a component 2n times the power supply frequency. Note that n is an integer of 1 or more.
平滑部200のコンデンサ210として電解コンデンサを用いる場合、充放電電流I3が大きいとコンデンサ210の経年劣化が加速する。充放電電流I3を減少させ、コンデンサ210の劣化を抑制するためには、制御部400は、コンデンサ210への入力電流I1=コンデンサ210からの出力電流I2となるようにインバータ310を制御すればよい。ただし、出力電流I2にはPWM(Pulse Width Modulation)に起因するリプル成分が重畳されるため、制御部400は、リプル成分を加味してインバータ310を制御する必要がある。制御部400は、コンデンサ210の劣化を抑制するためには、平滑部200、すなわちコンデンサ210の電力状態を監視し、モータ314に適切な脈動を与えて充放電電流I3が減少するようにすればよい。ここで、コンデンサ210の電力状態とは、コンデンサ210への入力電流I1、コンデンサ210からの出力電流I2、コンデンサ210の充放電電流I3、コンデンサ210の直流母線電圧Vdcなどのことである。制御部400は、これらのコンデンサ210の電力状態のうち、少なくともいずれか1つの情報が劣化抑制制御に必要となる。
When an electrolytic capacitor is used as the capacitor 210 of the smoothing portion 200, if the charge / discharge current I3 is large, the aging deterioration of the capacitor 210 accelerates. In order to reduce the charge / discharge current I3 and suppress the deterioration of the capacitor 210, the control unit 400 may control the inverter 310 so that the input current I1 to the capacitor 210 = the output current I2 from the capacitor 210. .. However, since the ripple component caused by PWM (Pulse Width Modulation) is superimposed on the output current I2, the control unit 400 needs to control the inverter 310 in consideration of the ripple component. In order to suppress the deterioration of the capacitor 210, the control unit 400 monitors the power state of the smoothing unit 200, that is, the capacitor 210, and gives an appropriate pulsation to the motor 314 so that the charge / discharge current I3 decreases. good. Here, the power state of the capacitor 210 is an input current I1 to the capacitor 210, an output current I2 from the capacitor 210, a charge / discharge current I3 of the capacitor 210, a DC bus voltage Vdc of the capacitor 210, and the like. The control unit 400 needs information on at least one of the power states of these capacitors 210 for deterioration suppression control.
本実施の形態では、制御部400は、電流検出部501で検出されたコンデンサ210への入力電流I1を用いて、出力電流I2からPWMリプルを除いた値が入力電流I1と一致するようにモータ314に脈動を加える。すなわち、制御部400は、電流検出部501の検出値に応じた脈動がモータ314の駆動パターンに重畳されるようにインバータ310の動作を制御し、コンデンサ210の充放電電流I3を抑制する。制御部400は、入力電流I1と出力電流I2との差分が小さくなるように、モータ314の入出力電力の関係からモータ314のq軸電流指令iq
*を制御する。制御部400は、この制御方法では、インバータ310への入力電力とモータ314の機械出力との関係を利用して、充放電電流I3を低減するための理想的なq軸電流を算出する。この制御方法は、入力電流I1を検出するセンサ、すなわち電流検出部501が必要になるが、理論式を用いてq軸電流の脈動波形をダイレクトに決定するため、入力電流I1の変化に対する即応性が高く、脈動負荷補償と併用したときにコンデンサ210の劣化抑制がしやすいというメリットがある。このように、本実施の形態において、制御部400は、d軸およびq軸を有する回転座標系において制御を行う。
In the present embodiment, the control unit 400 uses the input current I1 to the capacitor 210 detected by the current detection unit 501 so that the value obtained by removing the PWM ripple from the output current I2 matches the input current I1. Add pulsation to 314. That is, the control unit 400 controls the operation of the inverter 310 so that the pulsation according to the detection value of the current detection unit 501 is superimposed on the drive pattern of the motor 314, and suppresses the charge / discharge current I3 of the capacitor 210. The control unit 400 controls the q-axis current command i q * of the motor 314 from the relationship between the input / output power of the motor 314 so that the difference between the input current I1 and the output current I2 becomes small. In this control method, the control unit 400 calculates an ideal q-axis current for reducing the charge / discharge current I3 by utilizing the relationship between the input power to the inverter 310 and the mechanical output of the motor 314. This control method requires a sensor that detects the input current I1, that is, a current detection unit 501, but since the pulsating waveform of the q-axis current is directly determined using a theoretical formula, it is responsive to changes in the input current I1. There is a merit that deterioration of the capacitor 210 can be easily suppressed when used in combination with pulsating load compensation. As described above, in the present embodiment, the control unit 400 controls in the rotating coordinate system having the d-axis and the q-axis.
電力変換装置1において、電流検出部501は、コンデンサ210への入力電流I1の電流値を検出し、電流値を制御部400に出力する。制御部400は、コンデンサ210からインバータ310への出力電流I2からPWMリプルを除いた値が入力電流I1と一致するようにインバータ310を制御し、モータ314に出力される電力に脈動を加える。制御部400は、出力電流I2を適切に脈動させることによって、コンデンサ210の充放電電流I3を減少させることができる。前述のように、コンデンサ210への入力電流I1には電源周波数の2n倍成分が含まれることから、出力電流I2およびモータ314のq軸電流にも電源周波数の2n倍成分が含まれることになる。出力電流I2を適切に脈動させるためのモータ314のq軸電流の具体的な計算方法は、例えば、以下のような方法がある。
In the power conversion device 1, the current detection unit 501 detects the current value of the input current I1 to the capacitor 210 and outputs the current value to the control unit 400. The control unit 400 controls the inverter 310 so that the value obtained by removing the PWM ripple from the output current I2 from the capacitor 210 to the inverter 310 matches the input current I1, and adds pulsation to the power output to the motor 314. The control unit 400 can reduce the charge / discharge current I3 of the capacitor 210 by appropriately pulsating the output current I2. As described above, since the input current I1 to the capacitor 210 contains a component 2n times the power supply frequency, the output current I2 and the q-axis current of the motor 314 also contain a component 2n times the power supply frequency. .. As a specific method for calculating the q-axis current of the motor 314 for appropriately pulsating the output current I2, for example, there are the following methods.
電力変換装置1への入力となる商用電源110からの交流電源電圧は式(1)で表される。
The AC power supply voltage from the commercial power supply 110, which is the input to the power conversion device 1, is represented by the equation (1).
式(1)において、Vsは交流電源電圧の振幅を示し、ωinは交流電源電圧の角周波数を示し、tは時刻を示す。角周波数ωinは電源環境にもよるが、多くの場合、50Hz×2π=314rad/s、または60Hz×2π=377rad/sとなる。なお、電力変換装置1は、整流部130の前段または後段に昇圧部を含む回路構成の場合、コンデンサ210への入力電流I1にはPWMリプルが含まれることになるが、平均化して考慮しないこととする。入力電流I1が周期関数であると仮定して、入力電流I1をフーリエ級数で近似すると、入力電流I1は式(2)のように表せる。入力電流I1は整流部130よって電源周波数2fの整数倍の成分が多く含まれる波形となる。入力電流I1の基本波は電源周波数2fの成分となる。なお、数式では、他と表記を合わせるため、入力電流I1の「1」の部分は下付にしている。以降についても同様とする。
In equation (1), V s indicates the amplitude of the AC power supply voltage, ω in indicates the angular frequency of the AC power supply voltage, and t indicates the time. The angular frequency ω in depends on the power supply environment, but in most cases, it is 50 Hz × 2π = 314 rad / s or 60 Hz × 2π = 377 rad / s. In the case of a circuit configuration in which the power converter 1 includes a booster in the front or rear of the rectifier 130, the input current I1 to the capacitor 210 includes a PWM ripple, but it should not be averaged and considered. And. Assuming that the input current I1 is a periodic function, if the input current I1 is approximated by a Fourier series, the input current I1 can be expressed by the equation (2). The input current I1 has a waveform that includes many components that are integral multiples of the power supply frequency 2f due to the rectifying unit 130. The fundamental wave of the input current I1 is a component of the power supply frequency 2f. In the mathematical formula, the "1" part of the input current I1 is subscripted in order to match the notation with the others. The same shall apply thereafter.
式(2)において、IDCは電流の直流分を示し、I2f,I4f,I6f,…は電流の基本波振幅および高調波振幅を示し、θ2f,θ4f,θ6f,…は基本波位相および高調波位相を示す。入力電流I1をそのまま制御部400の制御に使用してもよいし、入力電流I1にフィルタを掛けてから制御部400の制御に使用してもよい。例えば、ローパスフィルタおよびバンドパスフィルタによって入力電流I1の直流成分、基本波成分、および低次高調波成分を抽出したものを入力電流I1´とすると、入力電流I1´は、例えば、式(3)のように表せる。式(3)において、入力電流I1´は、直流成分、電源周波数2f成分、および電源周波数4f成分を抽出したものであるが、電源周波数6f以上の成分を加味してもよい。なお、バンドパスフィルタは、FIR(Finite Impulse Response)フィルタによって構成してもよいし、IIR(Infinite Impulse Response)フィルタによって構成してもよい。また、入力電流I1´について、フーリエ級数展開の係数演算式から計算してもよい。
In equation (2), I DC indicates the direct current component of the current, I 2f , I 4f , I 6f , ... Indicates the fundamental and harmonic amplitudes of the current, and θ 2f , θ 4f , θ 6f , ... Shows the fundamental phase and harmonic phase. The input current I1 may be used as it is for the control of the control unit 400, or the input current I1 may be filtered and then used for the control of the control unit 400. For example, assuming that the input current I1 ′ is obtained by extracting the DC component, the fundamental wave component, and the low-order harmonic component of the input current I1 by a low-pass filter and a band-pass filter, the input current I1 ′ is expressed by, for example, the equation (3). It can be expressed as. In the formula (3), the input current I1'is obtained by extracting the DC component, the power supply frequency 2f component, and the power supply frequency 4f component, but a component having a power supply frequency of 6f or more may be added. The bandpass filter may be configured by an FIR (Fiinite Impulse Response) filter or an IIR (Infinite Impulse Response) filter. Further, the input current I1'may be calculated from the coefficient calculation formula of the Fourier series expansion.
上述のフィルタ類によって特定の周波数成分のみを抽出するのは、モータ314に対して与える脈動に意図しない周波数成分が含まれるのを防ぐためである。一方で、上述のフィルタ類を使用した場合、入力電流I1の変化に対する即応性が低下するので、フィルタ類を使用するか否かは状況に応じて決めてよい。以下の説明では、上述のフィルタ類を使用したものとして説明する。コンデンサ210からの出力電流I2の出力電流指令I2
*を式(4)のように与える。
The reason why only a specific frequency component is extracted by the above-mentioned filters is to prevent an unintended frequency component from being included in the pulsation given to the motor 314. On the other hand, when the above-mentioned filters are used, the responsiveness to the change of the input current I1 is lowered, so whether or not to use the filters may be decided depending on the situation. In the following description, it is assumed that the above-mentioned filters are used. The output current command I 2 * of the output current I 2 from the capacitor 210 is given as in the equation (4).
出力電流指令I2
*が指令値通りに流れるようにモータ314に脈動を加えるには、例えば、以下のようにすればよい。出力電流指令I2
*が指令値通りに流れたとき、コンデンサ210からモータ314に入力される有効電力は式(5)のように表される。
To add pulsation to the motor 314 so that the output current command I 2 * flows according to the command value, for example, the following may be performed. When the output current command I 2 * flows according to the command value, the active power input from the capacitor 210 to the motor 314 is expressed by the equation (5).
式(5)において、Vdcは直流母線電圧を示す。一方、モータ314で消費される有効電力Pmotは、dq軸電圧およびdq軸電流によって式(6)のように表される。
In equation (5), V dc represents the DC bus voltage. On the other hand, the active power P mot consumed by the motor 314 is expressed by the dq-axis voltage and the dq-axis current as shown in the equation (6).
ここで、永久磁石同期モータの定常状態の電圧方程式を考え、式(6)に代入すると式(7)が得られる。
Here, the voltage equation in the steady state of the permanent magnet synchronous motor is considered and substituted into the equation (6) to obtain the equation (7).
式(7)において、Raは電機子抵抗を示し、LdおよびLqはdq軸インダクタンスを示し、Φaはdq軸鎖交磁束数を示し、ωeは電気角速度を示す。電機子抵抗Raによる電圧降下が無視でき、なおかつ、d軸電流idがほぼゼロとみなせるケースでは、式(8)が成立する。
In equation (7), Ra indicates the armature resistance, L d and L q indicate the dq axis inductance, Φ a indicates the number of dq axis interlinkage magnetic fluxes, and ω e indicates the electric angular velocity. In the case where the voltage drop due to the armature resistance R a can be ignored and the d -axis current id can be regarded as almost zero, the equation (8) holds.
Pmot=Pinとなるようにモータ314に脈動を与えれば、平滑部200に流れる電流、すなわち充放電電流I3を低減できるため、式(9)のようにq軸電流脈動指令iqrip
*を与えればよい。
If a pulsation is applied to the motor 314 so that P mot = Pin , the current flowing through the smoothing portion 200, that is, the charge / discharge current I3 can be reduced. Just give it.
式(9)のようにq軸電流脈動指令iqrip
*を与えれば、平滑部200のコンデンサ210の劣化抑制が可能である。なお、d軸電流idが非ゼロの場合は、リラクタンストルクを加味して式(10)のように演算してもよい。
If the q-axis current pulsation command i qrip * is given as in the equation (9), it is possible to suppress the deterioration of the capacitor 210 of the smoothing portion 200. When the d -axis current id is non-zero, the calculation may be performed as in the equation (10) in consideration of the reluctance torque.

ここで、id
*はd軸電流指令である。式(9)および式(10)ではPmot=Pinを仮定したが、モータ314には銅損、鉄損、機械損といった損失がつきものである。そのため、このような損失を加味して演算を行ってもよい。
Here, id * is a d -axis current command. In equations (9) and (10), P mot = Pin is assumed, but the motor 314 is accompanied by losses such as copper loss, iron loss, and mechanical loss. Therefore, the calculation may be performed in consideration of such a loss.
上記のような演算を行う制御部400の構成について説明する。図2は、実施の形態1に係る電力変換装置1が備える制御部400の構成例を示すブロック図である。制御部400は、回転子位置推定部401と、速度制御部402と、弱め磁束制御部403と、電流制御部404と、座標変換部405,406と、PWM信号生成部407と、q軸電流脈動演算部408と、加算部409と、を備える。
The configuration of the control unit 400 that performs the above calculation will be described. FIG. 2 is a block diagram showing a configuration example of the control unit 400 included in the power conversion device 1 according to the first embodiment. The control unit 400 includes a rotor position estimation unit 401, a speed control unit 402, a weakening magnetic flux control unit 403, a current control unit 404, a coordinate conversion unit 405, 406, a PWM signal generation unit 407, and a q-axis current. A pulsation calculation unit 408 and an addition unit 409 are provided.
回転子位置推定部401は、モータ314にかかるdq軸電圧指令ベクトルVdq
*およびdq軸電流ベクトルidqから、モータ314が有する図示しない回転子について、回転子磁極のdq軸での方向である推定位相角θest、および回転子速度である推定速度ωestを推定する。
The rotor position estimation unit 401 is the direction of the rotor magnetic pole on the dq axis with respect to the rotor (not shown) of the motor 314 from the dq axis voltage command vector V dq * and the dq axis current vector i dq applied to the motor 314. The estimated phase angle θ est and the estimated speed ω est , which is the rotor speed, are estimated.
速度制御部402は、速度指令ω*と推定速度ωestとが一致するようにq軸電流指令iq
*を自動調整する。速度指令ω*は、電力変換装置1が冷凍サイクル適用機器として空気調和機などに使用される場合、例えば、図示しない温度センサで検出された温度、図示しない操作部であるリモコンから指示される設定温度を示す情報、運転モードの選択情報、運転開始及び運転終了の指示情報などに基づくものである。運転モードとは、例えば、暖房、冷房、除湿などである。
The speed control unit 402 automatically adjusts the q-axis current command i q * so that the speed command ω * and the estimated speed ω est match. The speed command ω * is set when the power conversion device 1 is used as an air conditioner or the like as a refrigeration cycle application device, for example, the temperature detected by a temperature sensor (not shown) or a setting instructed by a remote controller which is an operation unit (not shown). It is based on information indicating the temperature, operation mode selection information, operation start and operation end instruction information, and the like. The operation mode is, for example, heating, cooling, dehumidification, and the like.
弱め磁束制御部403は、dq軸電圧指令ベクトルVdq
*の絶対値が電圧リミット値Vlim
*の制限値内に収まるようにd軸電流指令id
*を自動調整する。また、本実施の形態において、弱め磁束制御部403は、q軸電流脈動演算部408で演算されたq軸電流脈動指令iqrip
*を加味して弱め磁束制御を行う。弱め磁束制御は、大別して、電圧制限楕円の方程式からd軸電流指令id
*を計算する方法、および電圧リミット値Vlim
*とdq軸電圧指令ベクトルVdq
*との絶対値の偏差がゼロになるようにd軸電流指令id
*を計算する方法の2種類があるが、どちらの方法を使用してもよい。
The weakening magnetic flux control unit 403 automatically adjusts the d -axis current command id * so that the absolute value of the dq-axis voltage command vector V dq * falls within the limit value of the voltage limit value V lim * . Further, in the present embodiment, the weakening magnetic flux control unit 403 performs the weakening magnetic flux control in consideration of the q-axis current pulsation command i qrip * calculated by the q-axis current pulsation calculation unit 408. Weak magnetic flux control is roughly divided into a method of calculating the d -axis current command id * from the equation of the voltage limiting ellipse, and the deviation of the absolute value between the voltage limit value V lim * and the dq-axis voltage command vector V dq * is zero. There are two methods for calculating the d -axis current command id * so that, but either method may be used.
電流制御部404は、dq軸電流ベクトルidqがd軸電流指令id
*およびq軸電流指令iq
*に追従するようにdq軸電圧指令ベクトルVdq
*を自動調整する。
The current control unit 404 automatically adjusts the dq-axis voltage command vector V dq * so that the dq-axis current vector i dq follows the d -axis current command id * and the q-axis current command i q * .
座標変換部405は、推定位相角θestに応じて、dq軸電圧指令ベクトルVdq
*をdq座標から交流量の電圧指令Vuvw
*に座標変換する。
The coordinate conversion unit 405 converts the dq axis voltage command vector V dq * from the dq coordinates to the voltage command V uvw * of the AC amount according to the estimated phase angle θ est .
座標変換部406は、推定位相角θestに応じて、モータ314に流れる電流Iuvwを交流量からdq座標のdq軸電流ベクトルidqに座標変換する。前述のように、制御部400は、モータ314に流れる電流Iuvwについて、インバータ310から出力される3相の電流値のうち、電流検出部313a,313bで検出される2相の電流値、および2相の電流値を用いて残りの1相の電流値を算出することによって取得することができる。
The coordinate conversion unit 406 converts the current I uvw flowing through the motor 314 from the alternating current amount into the dq-axis current vector i dq of the dq coordinates according to the estimated phase angle θ est . As described above, the control unit 400 has the current values of the two phases detected by the current detection units 313a and 313b among the three-phase current values output from the inverter 310 with respect to the current Ivw flowing through the motor 314. It can be obtained by calculating the current value of the remaining one phase using the current value of the two phases.
PWM信号生成部407は、座標変換部405で座標変換された電圧指令Vuvw
*に基づいてPWM信号を生成する。制御部400は、PWM信号生成部407で生成されたPWM信号をインバータ310のスイッチング素子311a~311fに出力することで、モータ314に電圧を印加する。
The PWM signal generation unit 407 generates a PWM signal based on the voltage command V uvw * coordinate-converted by the coordinate conversion unit 405. The control unit 400 applies a voltage to the motor 314 by outputting the PWM signal generated by the PWM signal generation unit 407 to the switching elements 311a to 311f of the inverter 310.
q軸電流脈動演算部408は、電流検出部501で検出された電流値である入力電流I1、直流母線電圧Vdc、および推定速度ωestに基づいて、前述のq軸電流脈動指令iqrip
*を演算する。なお、電力変換装置1は、図1では省略しているが、一般的に、回路保護、制御上の理由などから、コンデンサ210の直流母線電圧Vdcを検出する検出部を備えている。
The q-axis current pulsation calculation unit 408 uses the above-mentioned q-axis current pulsation command i qrip * based on the input current I1, the DC bus voltage V dc , and the estimated speed ω est , which are the current values detected by the current detection unit 501. Is calculated. Although omitted in FIG. 1, the power conversion device 1 generally includes a detection unit that detects the DC bus voltage Vdc of the capacitor 210 for circuit protection, control reasons, and the like.
加算部409は、速度制御部402から出力されたq軸電流指令iq
*と、q軸電流脈動演算部408で演算されたq軸電流脈動指令iqrip
*とを加算し、加算したものを電流制御部404へのq軸電流指令iq
*として出力する。
The addition unit 409 adds and adds the q-axis current command i q * output from the speed control unit 402 and the q-axis current pulsation command i qrip * calculated by the q-axis current pulsation calculation unit 408. It is output as a q-axis current command i q * to the current control unit 404.
制御部400は、従来と同様の制御を行う電力変換装置と比較して、式(9)または式(10)に基づいてq軸電流脈動指令iqrip
*を演算し、q軸電流脈動指令iqrip
*を用いてq軸電流指令iq
*を演算する点、およびq軸電流脈動指令iqrip
*を加味して弱め磁束制御を行う点が異なる。空調用圧縮機モータのようなアプリケーションでは、弱め磁束制御、インバータ過変調などを積極活用するが、これらの制御を使用する電圧飽和域では、q軸電流のみに脈動を与えても電圧不足で指令値に追従しない。そのため、q軸電流脈動指令iqrip
*に合わせてd軸電流idも脈動させる必要がある。電圧振幅が一定になるようにd軸電流idも同時に脈動させる弱め磁束制御の方法が公知である。弱め磁束制御部403は、電圧飽和時にq軸電流脈動指令iqrip
*と同時にd軸電流idも同時に脈動させて電圧不足に陥ることを防ぐ。
The control unit 400 calculates the q-axis current pulsation command i qrip * based on the equation (9) or the equation (10) as compared with the power conversion device that performs the same control as the conventional one, and the q-axis current pulsation command i. The difference is that the q-axis current command i q * is calculated using qrip * and the weakening magnetic flux control is performed by adding the q-axis current pulsation command i qrip * . Applications such as compressor motors for air conditioning actively utilize weakened magnetic flux control, inverter overmodulation, etc., but in the voltage saturation range where these controls are used, even if pulsation is applied only to the q-axis current, the voltage is insufficient. Does not follow the value. Therefore, it is necessary to pulsate the d -axis current id in accordance with the q-axis current pulsation command i qrip * . A method of weakening magnetic flux control in which the d -axis current id is also pulsated at the same time so that the voltage amplitude becomes constant is known. The weakening magnetic flux control unit 403 pulsates the d -axis current id at the same time as the q-axis current pulsation command i qrip * at the time of voltage saturation to prevent the voltage from becoming insufficient.
図3は、実施の形態1に係る電力変換装置1が備える制御部400のq軸電流脈動演算部408の構成例を示す図である。q軸電流脈動演算部408は、フィルタ381と、振幅換算部382と、を備える。フィルタ381は、コンデンサ210への入力電流I1を通し、コンデンサ210からの出力電流指令I2
*を計算する。本実施の形態において、フィルタ381がローパスフィルタおよびバンドパスフィルタを組み合わせたものとして説明したが、この構成は一例であり、別種のフィルタを用いても構わない。また、q軸電流脈動演算部408は、即応性をより重視する場合、フィルタ381を省いても構わない。振幅換算部382は、コンデンサ210からの出力電流指令I2
*、直流母線電圧Vdc、およびモータ314の推定速度ωestを用いて、式(9)または式(10)の演算を行ってq軸電流脈動指令iqrip
*を計算する。q軸電流の脈動振幅はモータ314の駆動条件によって変わってくるので、振幅換算部382は、駆動条件を適切に考慮して振幅を決定する。
FIG. 3 is a diagram showing a configuration example of the q-axis current pulsation calculation unit 408 of the control unit 400 included in the power conversion device 1 according to the first embodiment. The q-axis current pulsation calculation unit 408 includes a filter 381 and an amplitude conversion unit 382. The filter 381 passes the input current I1 to the capacitor 210 and calculates the output current command I 2 * from the capacitor 210. In the present embodiment, the filter 381 has been described as a combination of a low-pass filter and a band-pass filter, but this configuration is an example, and another type of filter may be used. Further, when the q-axis current pulsation calculation unit 408 places more importance on responsiveness, the filter 381 may be omitted. The amplitude conversion unit 382 performs the calculation of equation (9) or equation (10) using the output current command I 2 * from the capacitor 210, the DC bus voltage V dc , and the estimated speed ω est of the motor 314. Calculate the shaft current pulsation command i qrip * . Since the pulsating amplitude of the q-axis current changes depending on the driving conditions of the motor 314, the amplitude conversion unit 382 determines the amplitude in consideration of the driving conditions appropriately.
制御部400は、q軸電流脈動演算部408によってモータ314に適切に脈動を与え、コンデンサ210に流れる電流をゼロに近づける、または小さい値に制御することで、コンデンサ210への電流流入および電流流出、すなわちコンデンサ210の充放電電流I3を減らすことができる。
The control unit 400 appropriately applies pulsation to the motor 314 by the q-axis current pulsation calculation unit 408, and controls the current flowing through the capacitor 210 to be close to zero or to a small value, so that the current flows into and out of the capacitor 210. That is, the charge / discharge current I3 of the capacitor 210 can be reduced.
図4は、比較例として実施の形態1の電力変換装置1と同様の回路構成の電力変換装置における駆動波形の例を示す図である。図4の対象である比較例の電力変換装置は、本実施の形態の電力変換装置1のような制御は行っていないものとする。図5は、実施の形態1に係る電力変換装置1における駆動波形の例を示す図である。図4および図5において、上図は整流部130からコンデンサ210への入力電流I1、コンデンサ210からの出力電流I2、およびコンデンサ210の充放電電流I3を示し、下図は直流母線電圧Vdcを示している。なお、図4および図5は同じスケールで描かれている。また、説明の都合上、図4および図5では、PWMのリプルは考慮していない。
FIG. 4 is a diagram showing an example of a drive waveform in a power conversion device having the same circuit configuration as the power conversion device 1 of the first embodiment as a comparative example. It is assumed that the power conversion device of the comparative example, which is the object of FIG. 4, is not controlled like the power conversion device 1 of the present embodiment. FIG. 5 is a diagram showing an example of a drive waveform in the power conversion device 1 according to the first embodiment. In FIGS. 4 and 5, the upper figure shows the input current I1 from the rectifying unit 130 to the capacitor 210, the output current I2 from the capacitor 210, and the charge / discharge current I3 of the capacitor 210, and the lower figure shows the DC bus voltage Vdc . ing. Note that FIGS. 4 and 5 are drawn on the same scale. Further, for convenience of explanation, PWM ripple is not considered in FIGS. 4 and 5.
平滑部200のコンデンサ210の容量がある程度大きい場合、コンデンサ210に流れ込む入力電流I1が「うさぎの耳」のような形状となる。比較例の電力変換装置では、コンデンサからの出力電流I2がほぼ一定であったため、コンデンサの充放電電流I3も「うさぎの耳」の形になる。これに伴い、直流母線電圧Vdcには大きなリプルが生じる。これらの波形は周期的な脈動が大きいので、コンデンサ210の経年劣化が早まる。
When the capacity of the capacitor 210 of the smoothing portion 200 is large to some extent, the input current I1 flowing into the capacitor 210 has a shape like a “rabbit ear”. In the power conversion device of the comparative example, since the output current I2 from the capacitor is almost constant, the charge / discharge current I3 of the capacitor also has the shape of a “rabbit ear”. Along with this, a large ripple occurs in the DC bus voltage Vdc . Since these waveforms have a large periodic pulsation, the deterioration of the capacitor 210 over time is accelerated.
これに対して、本実施の形態の電力変換装置1では、コンデンサ210からの出力電流I2が「うさぎの耳」の形になるように制御部400がインバータ310の動作を制御するので、コンデンサ210の充放電電流I3のピーク値は小さくなる。コンデンサ210の充放電電流I3のピーク値が小さくなるのと同時に、直流母線電圧Vdcのリプルも小さくなる。コンデンサ210の電流の流出および流入を減らせば、素子劣化を抑制でき、部品の経年劣化を抑制できる。電力変換装置1では、前述のような制御部400の抑制の分、素子の容量を低減でき、リプル耐量が緩和される。そのため、安価な平滑素子、すなわちコンデンサ210を活用することができ、システムコストを抑制できる。なお、図5では、直流成分、電源周波数2f成分、および電源周波数4f成分のみを抽出して劣化抑制制御を実施しているが、コンデンサ210の充放電電流I3をより小さくしたい場合、より高次の成分を加味してもよい。ただし、実用上では電源周波数6f成分までを考慮すれば必要十分と考えられる。また、計算量を少なくしたい場合、直流成分、および電源周波数2f成分のみを考慮する形にしてもよい。
On the other hand, in the power conversion device 1 of the present embodiment, the control unit 400 controls the operation of the inverter 310 so that the output current I2 from the capacitor 210 is in the shape of a “rabbit ear”, so that the capacitor 210 The peak value of the charge / discharge current I3 becomes smaller. At the same time that the peak value of the charge / discharge current I3 of the capacitor 210 becomes small, the ripple of the DC bus voltage Vdc also becomes small. By reducing the outflow and inflow of the current of the capacitor 210, the deterioration of the element can be suppressed and the aging deterioration of the component can be suppressed. In the power conversion device 1, the capacity of the element can be reduced by the amount of suppression of the control unit 400 as described above, and the ripple withstand capacity is relaxed. Therefore, an inexpensive smoothing element, that is, a capacitor 210 can be utilized, and the system cost can be suppressed. In FIG. 5, only the DC component, the power supply frequency 2f component, and the power supply frequency 4f component are extracted to perform deterioration suppression control, but when it is desired to make the charge / discharge current I3 of the capacitor 210 smaller, the order is higher. Ingredients may be added. However, in practice, it is considered necessary and sufficient if the power frequency up to the 6f component is taken into consideration. Further, when it is desired to reduce the amount of calculation, only the DC component and the power supply frequency 2f component may be considered.
本実施の形態による制御部400の制御方法は、モータ314の入出力電力の理論式をベースにしているため、入力電流I1の変化に対してダイレクトにモータ314のq軸電流脈動を決定でき、入力電流I1の変化に対する即応性が高い。このことから、脈動負荷補償と併用したときに平滑部200のコンデンサ210の劣化抑制がしやすいというメリットがある。ただし、後述する実施の形態2および実施の形態3の自動探索をベースとした制御方法と比較して、実施の形態1の制御方法はロバスト性の面で難がある。定数変動が生じると所望の制御がしづらくなるのは、式(9)、式(10)などから明らかである。例えば、Φaに誤差があるとq軸電流脈動の大きさに過不足が生じる。また、式(9)および式(10)の導出の際に用いた仮定が成り立たない動作条件では、コンデンサ210の劣化抑制効果が減少するものと見られる。また、入力電流I1を検出するセンサ、すなわち電流検出部501が必要になる。これらの問題点を解消するための制御方法を後述の実施の形態2および実施の形態3で説明する。さらに後述する実施の形態4の制御方法も含めて、各実施の形態の制御方法を自由に組み合わせて使用してもよい。
Since the control method of the control unit 400 according to the present embodiment is based on the theoretical formula of the input / output power of the motor 314, the q-axis current pulsation of the motor 314 can be directly determined with respect to the change of the input current I1. Highly responsive to changes in the input current I1. Therefore, there is an advantage that deterioration of the capacitor 210 of the smoothing portion 200 can be easily suppressed when used in combination with pulsation load compensation. However, the control method of the first embodiment has a difficulty in robustness as compared with the control method based on the automatic search of the second embodiment and the third embodiment described later. It is clear from Eqs. (9), Eq. (10), etc. that the desired control becomes difficult when the constant fluctuation occurs. For example, if there is an error in Φ a , the magnitude of the q-axis current pulsation will be excessive or insufficient. Further, it is considered that the deterioration suppressing effect of the capacitor 210 is reduced under the operating conditions in which the assumptions used in the derivation of the equations (9) and (10) do not hold. Further, a sensor for detecting the input current I1, that is, a current detection unit 501 is required. A control method for solving these problems will be described in the second and third embodiments described later. Further, the control methods of the respective embodiments may be freely combined and used, including the control method of the fourth embodiment described later.
なお、図1に示すようにモータ314が周期的な負荷トルク脈動を有する負荷である圧縮機315を駆動する場合、制御部400は、前述の制御と併せて、負荷トルク脈動に起因する速度脈動を抑制するように制御してもよい。
As shown in FIG. 1, when the motor 314 drives the compressor 315, which is a load having periodic load torque pulsation, the control unit 400, in addition to the above-mentioned control, speed pulsation caused by the load torque pulsation. It may be controlled so as to suppress.
制御部400の動作を、フローチャートを用いて説明する。図6は、実施の形態1に係る電力変換装置1が備える制御部400の動作を示すフローチャートである。制御部400は、電流検出部501から検出値であるコンデンサ210の入力電流I1を取得する(ステップS1)。制御部400は、取得した検出値に基づいて、コンデンサ210への入力電流I1とコンデンサ210からの出力電流I2との差分が小さくなるように、インバータ310の動作を制御する(ステップS2)。
The operation of the control unit 400 will be described using a flowchart. FIG. 6 is a flowchart showing the operation of the control unit 400 included in the power conversion device 1 according to the first embodiment. The control unit 400 acquires the input current I1 of the capacitor 210, which is a detected value, from the current detection unit 501 (step S1). The control unit 400 controls the operation of the inverter 310 based on the acquired detection value so that the difference between the input current I1 to the capacitor 210 and the output current I2 from the capacitor 210 becomes small (step S2).
つづいて、電力変換装置1が備える制御部400のハードウェア構成について説明する。図7は、実施の形態1に係る電力変換装置1が備える制御部400を実現するハードウェア構成の一例を示す図である。制御部400は、プロセッサ91およびメモリ92により実現される。
Next, the hardware configuration of the control unit 400 included in the power conversion device 1 will be described. FIG. 7 is a diagram showing an example of a hardware configuration that realizes the control unit 400 included in the power conversion device 1 according to the first embodiment. The control unit 400 is realized by the processor 91 and the memory 92.
プロセッサ91は、CPU(Central Processing Unit、中央処理装置、処理装置、演算装置、マイクロプロセッサ、マイクロコンピュータ、プロセッサ、DSP(Digital Signal Processor)ともいう)、またはシステムLSI(Large Scale Integration)である。メモリ92は、RAM(Random Access Memory)、ROM(Read Only Memory)、フラッシュメモリー、EPROM(Erasable Programmable Read Only Memory)、EEPROM(登録商標)(Electrically Erasable Programmable Read Only Memory)といった不揮発性または揮発性の半導体メモリを例示できる。またメモリ92は、これらに限定されず、磁気ディスク、光ディスク、コンパクトディスク、ミニディスク、またはDVD(Digital Versatile Disc)でもよい。
The processor 91 is a CPU (Central Processing Unit, central processing unit, processing unit, arithmetic unit, microprocessor, microprocessor, processor, DSP (Digital Signal Processor)), or system LSI (Large Scale Integration). The memory 92 is a RAM (Random Access Memory), a ROM (Read Only Memory), a flash memory, an EPROM (Erasable Programmable Read Only Memory), an EPROM (registered trademark) (Electrically Memory) A semiconductor memory can be exemplified. Further, the memory 92 is not limited to these, and may be a magnetic disk, an optical disk, a compact disk, a mini disk, or a DVD (Digital Versaille Disc).
以上説明したように、本実施の形態によれば、電力変換装置1において、制御部400は、電流検出部501で検出されたコンデンサ210への入力電流I1を用いて、q軸電流脈動指令iqrip
*を演算し、q軸電流脈動指令iqrip
*を用いてd軸電流指令id
*を生成してインバータ310の動作を制御し、コンデンサ210の充放電電流I3を抑制することとした。これにより、電力変換装置1は、平滑用のコンデンサ210の劣化を抑制しつつ、電力変換装置1の大型化を抑制することができる。
As described above, according to the present embodiment, in the power conversion device 1, the control unit 400 uses the input current I1 to the capacitor 210 detected by the current detection unit 501 to generate the q-axis current pulsation command i. It was decided to calculate qrip * and generate d -axis current command id * using the q-axis current pulsation command i qrip * to control the operation of the inverter 310 and suppress the charge / discharge current I3 of the capacitor 210. As a result, the power conversion device 1 can suppress the deterioration of the smoothing capacitor 210 while suppressing the increase in size of the power conversion device 1.
実施の形態2.
実施の形態2では、電力変換装置において、コンデンサ210に流れる充放電電流I3を検出し、充放電電流I3のピーク値、または充放電電流I3に含まれる特定の周波数成分が減少するようなモータ314の脈動を含む駆動パターンを自動探索する。Embodiment 2.
In the second embodiment, in the power conversion device, themotor 314 that detects the charge / discharge current I3 flowing through the capacitor 210 and reduces the peak value of the charge / discharge current I3 or a specific frequency component contained in the charge / discharge current I3. The drive pattern including the pulsation of the electric current is automatically searched.
実施の形態2では、電力変換装置において、コンデンサ210に流れる充放電電流I3を検出し、充放電電流I3のピーク値、または充放電電流I3に含まれる特定の周波数成分が減少するようなモータ314の脈動を含む駆動パターンを自動探索する。
In the second embodiment, in the power conversion device, the
自動探索法として有名なものは、例えば、山登り法であるが、自動探索法であればどのような手法を用いても構わない。例えば、広義の意味で言えば、フィードバック制御も自動探索手法の一種であると考えられるため、フィードバック制御のテクニックを用いても構わない。実施の形態2の制御方法は、充放電電流I3を検出するセンサが必要なので、コスト面では難があるが、適切な動作点を自動探索するため、モータ314の定数変動が生じた場合でもロバストに劣化抑制が可能である。
The famous automatic search method is, for example, the mountain climbing method, but any method may be used as long as it is an automatic search method. For example, in a broad sense, feedback control is also considered to be a kind of automatic search method, so the feedback control technique may be used. The control method of the second embodiment requires a sensor for detecting the charge / discharge current I3, which is difficult in terms of cost. However, in order to automatically search for an appropriate operating point, it is robust even when the constant fluctuation of the motor 314 occurs. It is possible to suppress deterioration.
具体的に、フィードバック制御を活用した充放電電流I3を最小化する制御について説明する。ここで説明する制御方法は、充放電電流I3が最小となるモータ314の脈動を含む駆動パターンを自動探索するものである。
Specifically, the control that minimizes the charge / discharge current I3 by utilizing the feedback control will be described. The control method described here automatically searches for a drive pattern including the pulsation of the motor 314 that minimizes the charge / discharge current I3.
図8は、実施の形態2に係る電力変換装置1aの構成例を示す図である。電力変換装置1aは、図1に示す実施の形態1の電力変換装置1に対して、制御部400、および電流検出部501を削除し、制御部400a、および電流検出部502を追加したものである。なお、電力変換装置1a、および圧縮機315が備えるモータ314によって、モータ駆動装置2aを構成している。電流検出部502は、コンデンサ210の充放電電流I3を検出し、検出した電流値を制御部400aに出力する。電流検出部502は、コンデンサ210の電力状態を検出する検出部である。図9は、実施の形態2に係る電力変換装置1aが備える制御部400aの構成例を示すブロック図である。制御部400aは、図2に示す実施の形態1の制御部400に対して、q軸電流脈動演算部408を削除し、q軸電流脈動演算部408aを追加したものである。
FIG. 8 is a diagram showing a configuration example of the power conversion device 1a according to the second embodiment. The power conversion device 1a is the power conversion device 1 of the first embodiment shown in FIG. 1, in which the control unit 400 and the current detection unit 501 are deleted, and the control unit 400a and the current detection unit 502 are added. be. The motor drive device 2a is composed of the power conversion device 1a and the motor 314 included in the compressor 315. The current detection unit 502 detects the charge / discharge current I3 of the capacitor 210 and outputs the detected current value to the control unit 400a. The current detection unit 502 is a detection unit that detects the power state of the capacitor 210. FIG. 9 is a block diagram showing a configuration example of the control unit 400a included in the power conversion device 1a according to the second embodiment. The control unit 400a is obtained by deleting the q-axis current pulsation calculation unit 408 and adding the q-axis current pulsation calculation unit 408a to the control unit 400 of the first embodiment shown in FIG.
図10は、実施の形態2に係る電力変換装置1aが備える制御部400aのq軸電流脈動演算部408aの構成例を示す図である。q軸電流脈動演算部408aは、指令値をゼロとしたフィードバック制御器として構成される。通常、フィードバック制御器は、フィードフォワード制御器と比較して制御応答が低く、高周波の脈動を抑制するには不向きであるが、さまざまな高周波脈動抑制手段が過去に提案されている。有名な方法としては、フーリエ係数演算およびPID(Proportional Integral Differential)制御器を用いた手法がある。q軸電流脈動演算部408aは、減算部383と、フーリエ係数演算部384~387と、PID制御部388~391と、交流復元部392と、を備える。
FIG. 10 is a diagram showing a configuration example of the q-axis current pulsation calculation unit 408a of the control unit 400a included in the power conversion device 1a according to the second embodiment. The q-axis current pulsation calculation unit 408a is configured as a feedback controller with the command value set to zero. Normally, the feedback controller has a lower control response than the feedforward controller and is not suitable for suppressing high frequency pulsation, but various high frequency pulsation suppressing means have been proposed in the past. As a well-known method, there is a method using a Fourier coefficient calculation and a PID (Proportional Integral Differential) controller. The q-axis current pulsation calculation unit 408a includes a subtraction unit 383, a Fourier coefficient calculation unit 384 to 387, a PID control unit 388 to 391, and an AC restoration unit 392.
減算部383は、指令値=0とコンデンサ210の充放電電流I3の偏差を計算する。フーリエ級数展開の理論を用いれば、偏差に含まれる特定周波数のsin信号成分およびcos信号成分の振幅を抽出することが可能である。フーリエ係数演算部384~387は、電源周波数を1f成分であるとして、偏差に含まれるsin2f成分、cos2f成分、sin4f成分、およびcos4f成分の振幅をそれぞれ計算する。フーリエ係数演算部384~387で乗じられる検波信号は、それぞれsin2ωint、cos2ωint、sin4ωint、およびcos4ωintであり、入力信号と検波信号との積の平均値の2倍がそれぞれ偏差に含まれるsin2f成分、cos2f成分、sin4f成分、およびcos4f成分の振幅である。すなわち、フーリエ係数演算部384~387は、検出値と指令値との偏差に含まれる、商用電源110の電源周波数に応じた成分の振幅を演算する。コンデンサ210の充放電電流I3が周期波形であれば、フーリエ係数演算部384~387の出力信号はほぼ一定となる。
The subtraction unit 383 calculates the deviation between the command value = 0 and the charge / discharge current I3 of the capacitor 210. Using the theory of Fourier series expansion, it is possible to extract the amplitudes of the sin signal component and cos signal component of a specific frequency included in the deviation. The Fourier coefficient calculation units 384 to 387 calculate the amplitudes of the sin2f component, the cos2f component, the sin4f component, and the cos4f component included in the deviation, assuming that the power frequency is the 1f component. The detection signals multiplied by the Fourier coefficient calculation units 384 to 387 are sin2ω int , cos2ω int , sin4ω int , and cos4ω int , respectively, and the deviation includes twice the average value of the product of the input signal and the detection signal, respectively. It is the amplitude of the sin2f component, the cos2f component, the sin4f component, and the cos4f component. That is, the Fourier coefficient calculation units 384 to 387 calculate the amplitude of the component corresponding to the power supply frequency of the commercial power supply 110 included in the deviation between the detected value and the command value. If the charge / discharge current I3 of the capacitor 210 is a periodic waveform, the output signals of the Fourier coefficient calculation units 384 to 387 are substantially constant.
PID制御部388~391は、これらの偏差の特定の周波数成分がそれぞれゼロになるように比例-積分-微分制御、すなわちPID制御を実施する。比例ゲインおよび微分ゲインはゼロでも構わないが、偏差をゼロに収束させるためには積分ゲインの値が非ゼロでなければならない。そのため、PID制御部388~391では、積分動作がメインとなる。通常、積分制御の出力はゆるやかに変化するので、PID制御部388~391の出力も概ね一定と見なすことができる。交流復元部392は、PID制御部388~391の出力を交流成分に復元すべく、それぞれsin2ωint、cos2ωint、sin4ωint、およびcos4ωintと掛け合わせた後に合算し、q軸電流脈動指令iqrip
*を決定する。すなわち、交流復元部392は、コンデンサ210の充放電電流I3を抑制するための脈動分の指令であるq軸電流脈動指令iqrip
*を生成する。
The PID control units 388 to 391 carry out proportional-integral-differential control, that is, PID control so that the specific frequency components of these deviations become zero. The proportional gain and derivative gain can be zero, but the integrated gain value must be non-zero in order for the deviation to converge to zero. Therefore, in the PID control units 388 to 391, the integration operation is the main operation. Normally, since the output of the integral control changes slowly, the output of the PID control units 388 to 391 can also be regarded as being substantially constant. The AC restoration unit 392 multiplies the outputs of the PID control units 388 to 391 with sin2ω int , cos2ω int , sin4ω int , and cos4ω int , respectively, and then adds them up to restore the q-axis current pulsation command i qrip. * Determine. That is, the AC restoration unit 392 generates the q-axis current pulsation command i qrip * , which is a command for the pulsation for suppressing the charge / discharge current I3 of the capacitor 210.
実施の形態2では、このような制御方法を用いることで、実施の形態1の制御方法での欠点であるロバスト性の問題が改善される。一方で、PID制御を積分動作主体で用いる都合上、制御応答を高くできない。また、充放電電流I3を検出するセンサ、すなわち電流検出部502が必要なので、コスト面でも難がある。前述のように、各実施の形態の制御方法の弱点を補い合うため、後述する実施の形態3の制御方法も含めて、各実施の形態の制御方法を自由に組み合わせて使用してもよい。
In the second embodiment, by using such a control method, the problem of robustness, which is a drawback of the control method of the first embodiment, is improved. On the other hand, the control response cannot be increased because the PID control is mainly used for the integral operation. Further, since a sensor for detecting the charge / discharge current I3, that is, a current detection unit 502 is required, there is a problem in terms of cost. As described above, in order to compensate for the weaknesses of the control methods of each embodiment, the control methods of each embodiment may be freely combined and used, including the control method of the third embodiment described later.
実施の形態2では、センサレスベクトル制御方式を用いる場合について例示したが、多少の変形を加えて速度指令、電圧指令などに脈動を加える形にすれば、一次磁束一定制御にも適用が可能である。具体的には、交流復元部392において、乗じる交流復元用の三角関数に適切な位相オフセットを与えればよい。例えば、モータ314が永久磁石同期モータの場合、定常状態の電流ベクトルおよび電圧ベクトルは数十度程度の位相差があるから、制御部400aは、位相差を加味して交流復元処理を行い、電圧指令に足し込む形にすれば、一次磁束一定制御でも同様の制御が可能である。
In the second embodiment, the case where the sensorless vector control method is used has been illustrated, but it can also be applied to the constant primary magnetic flux control by adding a pulsation to the speed command, the voltage command, etc. by adding some deformation. .. Specifically, in the AC restoration unit 392, an appropriate phase offset may be given to the trigonometric function for AC restoration to be multiplied. For example, when the motor 314 is a permanent magnet synchronous motor, the current vector and the voltage vector in the steady state have a phase difference of about several tens of degrees. If it is added to the command, the same control is possible even with constant primary magnetic flux control.
制御部400aの動作を、フローチャートを用いて説明する。図11は、実施の形態2に係る電力変換装置1aが備える制御部400aの動作を示すフローチャートである。制御部400aは、電流検出部502から検出値であるコンデンサ210の充放電電流I3を取得する(ステップS11)。制御部400aは、取得した検出値に基づいて、コンデンサ210の充放電電流I3に含まれる特定の周波数成分が減少するように、インバータ310の動作を制御する(ステップS12)。
The operation of the control unit 400a will be described using a flowchart. FIG. 11 is a flowchart showing the operation of the control unit 400a included in the power conversion device 1a according to the second embodiment. The control unit 400a acquires the charge / discharge current I3 of the capacitor 210, which is a detected value, from the current detection unit 502 (step S11). The control unit 400a controls the operation of the inverter 310 so that the specific frequency component included in the charge / discharge current I3 of the capacitor 210 is reduced based on the acquired detected value (step S12).
以上説明したように、本実施の形態によれば、電力変換装置1aにおいて、制御部400aは、コンデンサ210の充放電電流I3に含まれる特定の周波数の脈動成分が減少するモータ314の駆動パターンを自動探索し、インバータ310の動作を制御することで、コンデンサ210の充放電電流I3を抑制することとした。これにより、電力変換装置1aは、平滑用のコンデンサ210の劣化を抑制しつつ、電力変換装置1aの大型化を抑制することができる。
As described above, according to the present embodiment, in the power conversion device 1a, the control unit 400a determines the drive pattern of the motor 314 in which the pulsation component of a specific frequency included in the charge / discharge current I3 of the capacitor 210 is reduced. It was decided to suppress the charge / discharge current I3 of the capacitor 210 by automatically searching and controlling the operation of the inverter 310. As a result, the power conversion device 1a can suppress the deterioration of the smoothing capacitor 210 and the increase in size of the power conversion device 1a.
実施の形態3.
実施の形態3では、電力変換装置において、コンデンサ210の両端電圧である直流母線電圧Vdcを検出し、直流母線電圧Vdcの脈動幅が減少するようなモータ314の脈動を含む駆動パターンを自動探索する。Embodiment 3.
In the third embodiment, in the power conversion device, the DC bus voltage V dc , which is the voltage across thecapacitor 210, is detected, and the drive pattern including the pulsation of the motor 314 such that the pulsation width of the DC bus voltage V dc is reduced is automatically performed. Explore.
実施の形態3では、電力変換装置において、コンデンサ210の両端電圧である直流母線電圧Vdcを検出し、直流母線電圧Vdcの脈動幅が減少するようなモータ314の脈動を含む駆動パターンを自動探索する。
In the third embodiment, in the power conversion device, the DC bus voltage V dc , which is the voltage across the
回路保護、制御上の理由などから、一般的に、電力変換装置は、コンデンサ210の直流母線電圧Vdcを電圧検出部で検出していることから、実施の形態3の制御方法は、実施の形態1および実施の形態2の制御方法と異なり、電流検出部の追加が不要である。実施の形態3の制御方法は、実施の形態1および実施の形態2の制御方法と比較して、コストの面で優れている。
For reasons of circuit protection, control, etc., the power conversion device generally detects the DC bus voltage Vdc of the capacitor 210 by the voltage detection unit. Therefore, the control method of the third embodiment is the embodiment. Unlike the control method of 1 and 2, it is not necessary to add a current detection unit. The control method of the third embodiment is superior in terms of cost as compared with the control method of the first embodiment and the second embodiment.
実施の形態2の場合と同様、自動探索法であればどのような手法を用いても構わない。例えば、広義の意味で言えば、フィードバック制御も自動探索手法の一種であると考えられるため、フィードバック制御のテクニックを用いても構わない。自動探索に基づく制御方法は、モータ314の定数変動が生じた場合でもロバストに劣化抑制が可能である。
As in the case of the second embodiment, any method may be used as long as it is an automatic search method. For example, in a broad sense, feedback control is also considered to be a kind of automatic search method, so the feedback control technique may be used. The control method based on the automatic search can robustly suppress deterioration even when the constant fluctuation of the motor 314 occurs.
具体的に、フィードバック制御を活用した直流母線電圧Vdcの脈動幅が減少する制御について説明する。ここで説明する制御方法は、直流母線電圧Vdcの脈動幅が減少するモータ314の脈動を含む駆動パターンを自動探索するものである。
Specifically, the control for reducing the pulsation width of the DC bus voltage Vdc using the feedback control will be described. The control method described here automatically searches for a drive pattern including the pulsation of the motor 314 in which the pulsation width of the DC bus voltage Vdc decreases.
図12は、実施の形態3に係る電力変換装置1bの構成例を示す図である。電力変換装置1bは、図1に示す実施の形態1の電力変換装置1に対して、制御部400、および電流検出部501を削除し、制御部400b、および電圧検出部503を追加したものである。なお、電力変換装置1b、および圧縮機315が備えるモータ314によって、モータ駆動装置2bを構成している。電圧検出部503は、コンデンサ210の両端電圧である直流母線電圧Vdcを検出し、検出した電圧値を制御部400bに出力する。電圧検出部503は、コンデンサ210の電力状態を検出する検出部である。なお、図1および図8では図示していなかったが、前述のように、回路保護、制御上の理由などから、一般的に、電力変換装置は、コンデンサ210の直流母線電圧Vdcを検出する構成、すなわち本実施の形態の電圧検出部503に相当する検出部を備えている。図13は、実施の形態3に係る電力変換装置1bが備える制御部400bの構成例を示すブロック図である。制御部400bは、図2に示す実施の形態1の制御部400に対して、q軸電流脈動演算部408を削除し、q軸電流脈動演算部408bを追加したものである。図9に示す実施の形態2のq軸電流脈動演算部408aでは、コンデンサ210の充放電電流I3が入力されていたが、図13に示す実施の形態3のq軸電流脈動演算部408bでは、コンデンサ210の直流母線電圧Vdcが入力されている点が実施の形態2と異なる。
FIG. 12 is a diagram showing a configuration example of the power conversion device 1b according to the third embodiment. The power conversion device 1b is the power conversion device 1 of the first embodiment shown in FIG. 1, in which the control unit 400 and the current detection unit 501 are deleted, and the control unit 400b and the voltage detection unit 503 are added. be. The motor drive device 2b is composed of the power conversion device 1b and the motor 314 included in the compressor 315. The voltage detection unit 503 detects the DC bus voltage Vdc , which is the voltage across the capacitor 210, and outputs the detected voltage value to the control unit 400b. The voltage detection unit 503 is a detection unit that detects the power state of the capacitor 210. Although not shown in FIGS. 1 and 8, as described above, the power conversion device generally detects the DC bus voltage V dc of the capacitor 210 for reasons of circuit protection, control, and the like. It has a configuration, that is, a detection unit corresponding to the voltage detection unit 503 of the present embodiment. FIG. 13 is a block diagram showing a configuration example of the control unit 400b included in the power conversion device 1b according to the third embodiment. The control unit 400b deletes the q-axis current pulsation calculation unit 408 and adds the q-axis current pulsation calculation unit 408b to the control unit 400 of the first embodiment shown in FIG. In the q-axis current pulsation calculation unit 408a of the second embodiment shown in FIG. 9, the charge / discharge current I3 of the capacitor 210 was input, but in the q-axis current pulsation calculation unit 408b of the third embodiment shown in FIG. 13, the charge / discharge current I3 was input. The point that the DC bus voltage V dc of the capacitor 210 is input is different from the second embodiment.
図14は、実施の形態3に係る電力変換装置1bが備える制御部400bのq軸電流脈動演算部408bの構成例を示す図である。q軸電流脈動演算部408bは、目標値をゼロとしたフィードバック制御器として構成される。q軸電流脈動演算部408bは、減算部383と、フーリエ係数演算部384~387と、PID制御部388~391と、交流復元部392bと、を備える。
FIG. 14 is a diagram showing a configuration example of the q-axis current pulsation calculation unit 408b of the control unit 400b included in the power conversion device 1b according to the third embodiment. The q-axis current pulsation calculation unit 408b is configured as a feedback controller with a target value of zero. The q-axis current pulsation calculation unit 408b includes a subtraction unit 383, a Fourier coefficient calculation unit 384 to 387, a PID control unit 388 to 391, and an AC restoration unit 392b.
減算部383は、目標値=0とコンデンサ210の直流母線電圧Vdcの偏差を計算する。フーリエ係数演算部384~387は、電源周波数を1f成分であるとして、偏差に含まれるsin2f成分、cos2f成分、sin4f成分、およびcos4f成分の振幅をそれぞれ計算する。すなわち、フーリエ係数演算部384~387は、検出値と目標値との偏差に含まれる、商用電源110の電源周波数に応じた成分の振幅を演算する。PID制御部388~391は、これらの偏差の特定の周波数成分がそれぞれゼロになるように比例-積分-微分制御、すなわちPID制御を実施する。比例ゲインおよび微分ゲインはゼロでも構わないが、偏差をゼロに収束させるためには積分ゲインの値が非ゼロでなければならない。そのため、PID制御部388~391では、積分動作がメインとなる。通常、積分制御の出力はゆるやかに変化するので、PID制御部388~391の出力も概ね一定と見なすことができる。フーリエ係数演算部384~387およびPID制御部388~391については、入力される値が異なるだけで計算内容はほぼ実施の形態2のときと同じである。
The subtraction unit 383 calculates the deviation between the target value = 0 and the DC bus voltage V dc of the capacitor 210. The Fourier coefficient calculation units 384 to 387 calculate the amplitudes of the sin2f component, the cos2f component, the sin4f component, and the cos4f component included in the deviation, assuming that the power frequency is the 1f component. That is, the Fourier coefficient calculation units 384 to 387 calculate the amplitude of the component corresponding to the power supply frequency of the commercial power supply 110 included in the deviation between the detected value and the target value. The PID control units 388 to 391 carry out proportional-integral-differential control, that is, PID control so that the specific frequency components of these deviations become zero. The proportional gain and derivative gain can be zero, but the integrated gain value must be non-zero in order for the deviation to converge to zero. Therefore, in the PID control units 388 to 391, the integration operation is the main operation. Normally, since the output of the integral control changes slowly, the output of the PID control units 388 to 391 can also be regarded as being substantially constant. Regarding the Fourier coefficient calculation units 384 to 387 and the PID control units 388 to 391, the calculation contents are almost the same as those in the second embodiment except that the input values are different.
交流復元部392bは、コンデンサ210の充放電電流I3を積分する。ここで、コンデンサ210の容量で除算したものが直流母線電圧Vdcであるから、コンデンサ210の充放電電流I3と直流母線電圧Vdcとの間には90度の位相差がある。交流復元部392bは、90度の位相差を加味してq軸電流脈動指令iqrip
*を決定しなければならない。90度の位相差をθoffset(=π/2[rad])とした場合、交流復元部392bは、以下のように復元演算を実施する。このようにして、交流復元部392bは、コンデンサ210の充放電電流I3を抑制するための脈動分の指令であるq軸電流脈動指令iqrip
*を生成する。
The AC restoration unit 392b integrates the charge / discharge current I3 of the capacitor 210. Here, since the DC bus voltage V dc is divided by the capacity of the capacitor 210, there is a phase difference of 90 degrees between the charge / discharge current I3 of the capacitor 210 and the DC bus voltage V dc . The AC restoration unit 392b must determine the q-axis current pulsation command i qrip * in consideration of the phase difference of 90 degrees. When the phase difference of 90 degrees is set to θ offset (= π / 2 [rad]), the AC restoration unit 392b performs the restoration operation as follows. In this way, the AC restoration unit 392b generates the q-axis current pulsation command i qrip * , which is a command for the pulsation for suppressing the charge / discharge current I3 of the capacitor 210.
フーリエ係数演算部384~387で乗じられる検波信号がそれぞれsin2ωint、cos2ωint、sin4ωint、およびcos4ωintであった場合、交流復元部392bでの復元信号は、sin2(ωint+θoffset)、cos2(ωint+θoffset)、sin4(ωint+θoffset)、およびcos4(ωint+θoffset)となる。図10に示す実施の形態2のq軸電流脈動演算部408aは、検波信号および復元信号は同じものを用いればよいが、図14に示す実施の形態3のq軸電流脈動演算部408bは、θoffsetの分だけ、復元信号をシフトしておく必要がある。交流復元部392bは、PID制御部388~391の出力と復元信号との積和を計算すれば、q軸電流脈動指令iqrip
*を決定することができる。
When the detection signals multiplied by the Fourier coefficient calculation units 384 to 387 are sin2ω int , cos2ω int , sin4ω int , and cos4ω int , respectively, the restoration signals in the AC restoration unit 392b are sin2 (ω int + θ offset ) and cos2. (Ω int + θ offset ), sin4 (ω int + θ offset ), and cos4 (ω int + θ offset ). The q-axis current pulsation calculation unit 408a of the second embodiment shown in FIG. 10 may use the same detection signal and restoration signal, but the q-axis current pulsation calculation unit 408b of the third embodiment shown in FIG. 14 may use the same detection signal and restoration signal. It is necessary to shift the restoration signal by the amount of θ offset . The AC restoration unit 392b can determine the q-axis current pulsation command i qrip * by calculating the sum of products of the outputs of the PID control units 388 to 391 and the restoration signal.
実施の形態3では、この様な制御方法を用いることで、実施の形態1および実施の形態2と比較して、コストの面で有利である。また、実施の形態3では、このような制御方法を用いることで、実施の形態1の制御方法での欠点であるロバスト性の問題が改善される。一方で、PID制御を積分動作主体で用いる都合上、制御応答を高くできない。前述のように、各実施の形態の制御方法の弱点を補い合うため、後述する実施の形態4の制御方法も含めて、各実施の形態の制御方法を自由に組み合わせて使用してもよい。
In the third embodiment, by using such a control method, it is advantageous in terms of cost as compared with the first embodiment and the second embodiment. Further, in the third embodiment, by using such a control method, the problem of robustness, which is a drawback of the control method of the first embodiment, is improved. On the other hand, the control response cannot be increased because the PID control is mainly used for the integral operation. As described above, in order to compensate for the weaknesses of the control methods of each embodiment, the control methods of each embodiment may be freely combined and used, including the control method of the fourth embodiment described later.
制御部400bの動作を、フローチャートを用いて説明する。図15は、実施の形態3に係る電力変換装置1bが備える制御部400bの動作を示すフローチャートである。制御部400bは、電圧検出部503から検出値であるコンデンサ210の両端電圧である直流母線電圧Vdcを取得する(ステップS21)。制御部400bは、取得した検出値に基づいて、直流母線電圧Vdcに含まれる特定の脈動幅が減少するように、インバータ310の動作を制御する(ステップS22)。
The operation of the control unit 400b will be described with reference to a flowchart. FIG. 15 is a flowchart showing the operation of the control unit 400b included in the power conversion device 1b according to the third embodiment. The control unit 400b acquires the DC bus voltage V dc , which is the voltage across the capacitor 210, which is the detected value, from the voltage detection unit 503 (step S21). The control unit 400b controls the operation of the inverter 310 so that the specific pulsation width included in the DC bus voltage Vdc is reduced based on the acquired detected value (step S22).
以上説明したように、本実施の形態によれば、電力変換装置1bにおいて、制御部400bは、直流母線電圧Vdcに含まれる特定の周波数の脈動成分が減少するモータ314の駆動パターンを自動探索し、インバータ310の動作を制御することで、コンデンサ210の充放電電流I3を抑制することとした。これにより、電力変換装置1bは、平滑用のコンデンサ210の劣化を抑制しつつ、電力変換装置1bの大型化を抑制することができる。
As described above, according to the present embodiment, in the power conversion device 1b, the control unit 400b automatically searches for the drive pattern of the motor 314 in which the pulsation component of a specific frequency included in the DC bus voltage Vdc is reduced. By controlling the operation of the inverter 310, the charge / discharge current I3 of the capacitor 210 is suppressed. As a result, the power conversion device 1b can suppress the deterioration of the smoothing capacitor 210 while suppressing the increase in size of the power conversion device 1b.
実施の形態4.
実施の形態1から実施の形態3では、コンデンサ210の充放電電流I3が減少するq軸電流の脈動を含む駆動パターンをモータ314の駆動中に決定する方法について説明した。しかしながら、コンデンサ210の充放電電流I3が減少するq軸電流の脈動を含む駆動パターンが既知であれば、既知のデータに基づいて劣化抑制制御を実施しても構わない。すなわち、コンデンサ210の充放電電流I3が減少するq軸電流の脈動を表す脈動パターンを事前調査しておき、事前学習したデータに基づいて劣化抑制制御を行うという方法が考えられる。実施の形態4では、充放電電流I3または直流母線電圧Vdcの脈動が減少するようなモータ314の脈動パターンを事前に調査しておき、事前調査したデータを用いてモータ314に脈動を与える。事前調査したデータは電力変換装置内の記憶部に記憶され、モータ314の駆動条件に応じて適切な脈動パターンが選択される。 Embodiment 4.
In the first to third embodiments, a method of determining a drive pattern including a pulsation of the q-axis current in which the charge / discharge current I3 of thecapacitor 210 decreases during driving of the motor 314 has been described. However, if the drive pattern including the pulsation of the q-axis current in which the charge / discharge current I3 of the capacitor 210 decreases is known, deterioration suppression control may be performed based on the known data. That is, a method is conceivable in which a pulsation pattern representing the pulsation of the q-axis current in which the charge / discharge current I3 of the capacitor 210 decreases is investigated in advance, and deterioration suppression control is performed based on the pre-learned data. In the fourth embodiment, the pulsation pattern of the motor 314 in which the pulsation of the charge / discharge current I3 or the DC bus voltage Vdc is reduced is investigated in advance, and the pulsation is given to the motor 314 using the data investigated in advance. The data investigated in advance is stored in a storage unit in the power conversion device, and an appropriate pulsation pattern is selected according to the driving conditions of the motor 314.
実施の形態1から実施の形態3では、コンデンサ210の充放電電流I3が減少するq軸電流の脈動を含む駆動パターンをモータ314の駆動中に決定する方法について説明した。しかしながら、コンデンサ210の充放電電流I3が減少するq軸電流の脈動を含む駆動パターンが既知であれば、既知のデータに基づいて劣化抑制制御を実施しても構わない。すなわち、コンデンサ210の充放電電流I3が減少するq軸電流の脈動を表す脈動パターンを事前調査しておき、事前学習したデータに基づいて劣化抑制制御を行うという方法が考えられる。実施の形態4では、充放電電流I3または直流母線電圧Vdcの脈動が減少するようなモータ314の脈動パターンを事前に調査しておき、事前調査したデータを用いてモータ314に脈動を与える。事前調査したデータは電力変換装置内の記憶部に記憶され、モータ314の駆動条件に応じて適切な脈動パターンが選択される。 Embodiment 4.
In the first to third embodiments, a method of determining a drive pattern including a pulsation of the q-axis current in which the charge / discharge current I3 of the
図16は、実施の形態4に係る電力変換装置が備える制御部400cの構成例を示すブロック図である。制御部400cを備える電力変換装置については、実施の形態1から実施の形態3で説明した電力変換装置1~1bと同様の回路構成であってもよいし、各実施の形態で個別に備えている検出部を備えない回路構成であってもよい。制御部400cは、図2に示す実施の形態1の制御部400に対して、q軸電流脈動演算部408を削除し、q軸電流脈動演算部408cを追加したものである。q軸電流脈動演算部408cは、図示しない記憶部、および脈動パターン発生部を備える。記憶部には、コンデンサ210の充放電電流I3が低減するモータ314の脈動パターンが記憶されている。記憶部に記憶されている脈動パターンのデータは、事前調査により取得されたものである。
FIG. 16 is a block diagram showing a configuration example of the control unit 400c included in the power conversion device according to the fourth embodiment. The power conversion device including the control unit 400c may have the same circuit configuration as the power conversion devices 1 to 1b described in the first to third embodiments, or may be individually provided in each embodiment. The circuit configuration may not include the detection unit. The control unit 400c is obtained by deleting the q-axis current pulsation calculation unit 408 and adding the q-axis current pulsation calculation unit 408c to the control unit 400 of the first embodiment shown in FIG. The q-axis current pulsation calculation unit 408c includes a storage unit (not shown) and a pulsation pattern generation unit. The storage unit stores a pulsation pattern of the motor 314 in which the charge / discharge current I3 of the capacitor 210 is reduced. The pulsation pattern data stored in the storage unit was obtained by a preliminary survey.
事前調査の方法はどのようなものであっても構わない。例えば、ある脈動パターンを試行錯誤的に印加して充放電電流I3または直流母線電圧Vdcの脈動が減少するようなパターンを調査しても構わないし、前述の自動探索法を用いて調査を行っても構わない。また、実機試験を通じて調査を行っても構わないし、コンピュータシミュレーションを通じて調査を行っても構わない。近年、機械学習、AI(Artificial Intelligence)技術が一般的になってきていることから、このような技術を利用しても構わない。
Any method of preliminary survey may be used. For example, a certain pulsation pattern may be applied by trial and error to investigate a pattern in which the pulsation of the charge / discharge current I3 or the DC bus voltage Vdc decreases, or the investigation is performed using the above-mentioned automatic search method. It doesn't matter. Further, the survey may be conducted through an actual machine test or a computer simulation. In recent years, machine learning and AI (Artificial Intelligence) techniques have become common, and such techniques may be used.
また、実施の形態2の例であれば、制御部400cは、電流検出部502で検出された充放電電流I3に含まれる特定の周波数の脈動成分が減少する脈動パターンを自動探索し、制御の過程で得られた脈動パターンを運転条件ごとに設定された脈動パターンとして記憶してもよい。同様に、実施の形態3の例であれば、制御部400cは、電圧検出部503で検出された直流母線電圧Vdcに含まれる特定の周波数の脈動成分が減少する脈動パターンを自動探索し、制御の過程で得られた脈動パターンを運転条件ごとに設定された脈動パターンとして記憶してもよい。
Further, in the example of the second embodiment, the control unit 400c automatically searches for a pulsation pattern in which the pulsation component of a specific frequency included in the charge / discharge current I3 detected by the current detection unit 502 decreases, and controls the control. The pulsation pattern obtained in the process may be stored as a pulsation pattern set for each operating condition. Similarly, in the example of the third embodiment, the control unit 400c automatically searches for a pulsation pattern in which the pulsation component of a specific frequency included in the DC bus voltage Vdc detected by the voltage detection unit 503 decreases. The pulsation pattern obtained in the control process may be stored as a pulsation pattern set for each operating condition.
記憶部に記憶されている脈動パターンのデータは、モータ314の運転条件と紐付けられている。例えば、モータ314の場合、圧縮機315の吸入圧力、吐出圧力、冷媒の温度、空調機の室内温度の目標値などが運転条件に相当する。q軸電流脈動演算部408cは、このような運転条件に応じてコンデンサ210の充放電電流I3を低減するための適切な脈動パターンを記憶部から選択する。q軸電流脈動演算部408cは、脈動パターン発生部を用いて、記憶部から選択した脈動パターンに基づいて、q軸電流脈動指令iqrip
*を発生させる。q軸電流脈動演算部408cは、このような制御によって、コンデンサ210の劣化抑制制御を実施する。
The pulsation pattern data stored in the storage unit is associated with the operating conditions of the motor 314. For example, in the case of the motor 314, the suction pressure, the discharge pressure, the temperature of the refrigerant, the target value of the room temperature of the air conditioner, and the like of the compressor 315 correspond to the operating conditions. The q-axis current pulsation calculation unit 408c selects an appropriate pulsation pattern from the storage unit for reducing the charge / discharge current I3 of the capacitor 210 according to such operating conditions. The q-axis current pulsation calculation unit 408c uses the pulsation pattern generation unit to generate the q-axis current pulsation command i qrip * based on the pulsation pattern selected from the storage unit. The q-axis current pulsation calculation unit 408c performs deterioration suppression control of the capacitor 210 by such control.
事前調査に基づく制御方法は、ロバスト性に難があり、また、容量の大きな記憶部が必要とされるデメリットがあるが、計算処理自体は簡単である。したがって、計算機の演算性能が貧弱で、かつ運転条件数がごく少ない場合には、実施の形態4のような制御方法が有効な手段となる可能性がある。事前調査の煩雑さを低減するため、実施の形態1から実施の形態4で説明した制御方法を自由に組み合わせてもよい。
The control method based on the preliminary survey has the disadvantages of having difficulty in robustness and requiring a storage unit having a large capacity, but the calculation process itself is simple. Therefore, when the calculation performance of the computer is poor and the number of operating conditions is very small, the control method as in the fourth embodiment may be an effective means. In order to reduce the complexity of the preliminary survey, the control methods described in the first to fourth embodiments may be freely combined.
制御部400cの動作を、フローチャートを用いて説明する。図17は、実施の形態4に係る電力変換装置が備える制御部400cの動作を示すフローチャートである。制御部400cは、圧縮機315の運転条件を取得する(ステップS31)。制御部400cは、取得した運転条件に基づいて、コンデンサ210の充放電電流I3を低減するための適切な脈動パターンを選択し、インバータ310の動作を制御する(ステップS32)。
The operation of the control unit 400c will be described using a flowchart. FIG. 17 is a flowchart showing the operation of the control unit 400c included in the power conversion device according to the fourth embodiment. The control unit 400c acquires the operating conditions of the compressor 315 (step S31). The control unit 400c selects an appropriate pulsation pattern for reducing the charge / discharge current I3 of the capacitor 210 based on the acquired operating conditions, and controls the operation of the inverter 310 (step S32).
以上説明したように、本実施の形態によれば、制御部400cは、モータ314を含む負荷の運転条件ごとに設定されたコンデンサ210の充放電電流I3を抑制するための脈動パターンを記憶し、負荷である圧縮機315の運転条件に応じた脈動パターンを用いてコンデンサ210の充放電電流I3を抑制するための脈動分の指令であるq軸電流脈動指令iqrip
*を生成し、インバータ310の動作を制御する。この場合においても、実施の形態1から実施の形態3と同様の効果を得ることができる。
As described above, according to the present embodiment, the control unit 400c stores the pulsation pattern for suppressing the charge / discharge current I3 of the capacitor 210 set for each operating condition of the load including the motor 314. Using the pulsation pattern according to the operating conditions of the compressor 315, which is the load, the q-axis current pulsation command i qrip * , which is the command for the pulsation to suppress the charge / discharge current I3 of the capacitor 210, is generated, and the inverter 310 Control the operation. Also in this case, the same effects as those of the first to third embodiments can be obtained.
実施の形態5.
図18は、実施の形態5に係る冷凍サイクル適用機器900の構成例を示す図である。実施の形態5に係る冷凍サイクル適用機器900は、実施の形態1で説明した電力変換装置1を備える。なお、冷凍サイクル適用機器900は、他の実施の形態で説明した電力変換装置1a,1bを備えることも可能であるが、ここでは一例として、電力変換装置1を備える場合について説明する。実施の形態5に係る冷凍サイクル適用機器900は、空気調和機、冷蔵庫、冷凍庫、ヒートポンプ給湯器といった冷凍サイクルを備える製品に適用することが可能である。なお、図18において、実施の形態1と同様の機能を有する構成要素には、実施の形態1と同一の符号を付している。 Embodiment 5.
FIG. 18 is a diagram showing a configuration example of the refrigerationcycle application device 900 according to the fifth embodiment. The refrigeration cycle application device 900 according to the fifth embodiment includes the power conversion device 1 described in the first embodiment. The refrigeration cycle application device 900 may include the power conversion devices 1a and 1b described in other embodiments, but here, as an example, a case where the power conversion device 1 is provided will be described. The refrigerating cycle applicable device 900 according to the fifth embodiment can be applied to products including a refrigerating cycle such as an air conditioner, a refrigerator, a freezer, and a heat pump water heater. In FIG. 18, the components having the same functions as those of the first embodiment are designated by the same reference numerals as those of the first embodiment.
図18は、実施の形態5に係る冷凍サイクル適用機器900の構成例を示す図である。実施の形態5に係る冷凍サイクル適用機器900は、実施の形態1で説明した電力変換装置1を備える。なお、冷凍サイクル適用機器900は、他の実施の形態で説明した電力変換装置1a,1bを備えることも可能であるが、ここでは一例として、電力変換装置1を備える場合について説明する。実施の形態5に係る冷凍サイクル適用機器900は、空気調和機、冷蔵庫、冷凍庫、ヒートポンプ給湯器といった冷凍サイクルを備える製品に適用することが可能である。なお、図18において、実施の形態1と同様の機能を有する構成要素には、実施の形態1と同一の符号を付している。 Embodiment 5.
FIG. 18 is a diagram showing a configuration example of the refrigeration
冷凍サイクル適用機器900は、実施の形態1におけるモータ314を内蔵した圧縮機315と、四方弁902と、室内熱交換器906と、膨張弁908と、室外熱交換器910とが冷媒配管912を介して取り付けられている。
In the refrigeration cycle application device 900, the compressor 315 having a built-in motor 314, the four-way valve 902, the indoor heat exchanger 906, the expansion valve 908, and the outdoor heat exchanger 910 form the refrigerant pipe 912 according to the first embodiment. It is attached via.
圧縮機315の内部には、冷媒を圧縮する圧縮機構904と、圧縮機構904を動作させるモータ314とが設けられている。
Inside the compressor 315, a compression mechanism 904 for compressing the refrigerant and a motor 314 for operating the compression mechanism 904 are provided.
冷凍サイクル適用機器900は、四方弁902の切替動作により暖房運転又は冷房運転をすることができる。圧縮機構904は、可変速制御されるモータ314によって駆動される。
The refrigeration cycle applicable device 900 can perform heating operation or cooling operation by switching operation of the four-way valve 902. The compression mechanism 904 is driven by a variable speed controlled motor 314.
暖房運転時には、実線矢印で示すように、冷媒が圧縮機構904で加圧されて送り出され、四方弁902、室内熱交換器906、膨張弁908、室外熱交換器910及び四方弁902を通って圧縮機構904に戻る。
During the heating operation, as shown by the solid arrow, the refrigerant is pressurized by the compression mechanism 904 and sent out, and passes through the four-way valve 902, the indoor heat exchanger 906, the expansion valve 908, the outdoor heat exchanger 910 and the four-way valve 902. Return to the compression mechanism 904.
冷房運転時には、破線矢印で示すように、冷媒が圧縮機構904で加圧されて送り出され、四方弁902、室外熱交換器910、膨張弁908、室内熱交換器906及び四方弁902を通って圧縮機構904に戻る。
During the cooling operation, as shown by the broken arrow arrow, the refrigerant is pressurized by the compression mechanism 904 and sent out, and passes through the four-way valve 902, the outdoor heat exchanger 910, the expansion valve 908, the indoor heat exchanger 906 and the four-way valve 902. Return to the compression mechanism 904.
暖房運転時には、室内熱交換器906が凝縮器として作用して熱放出を行い、室外熱交換器910が蒸発器として作用して熱吸収を行う。冷房運転時には、室外熱交換器910が凝縮器として作用して熱放出を行い、室内熱交換器906が蒸発器として作用し、熱吸収を行う。膨張弁908は、冷媒を減圧して膨張させる。
During the heating operation, the indoor heat exchanger 906 acts as a condenser to release heat, and the outdoor heat exchanger 910 acts as an evaporator to absorb heat. During the cooling operation, the outdoor heat exchanger 910 acts as a condenser to release heat, and the indoor heat exchanger 906 acts as an evaporator to absorb heat. The expansion valve 908 depressurizes the refrigerant and expands it.
以上の実施の形態に示した構成は、一例を示すものであり、別の公知の技術と組み合わせることも可能であるし、実施の形態同士を組み合わせることも可能であるし、要旨を逸脱しない範囲で、構成の一部を省略、変更することも可能である。
The configuration shown in the above embodiments is an example, and can be combined with another known technique, can be combined with each other, and does not deviate from the gist. It is also possible to omit or change a part of the configuration.
1,1a,1b 電力変換装置、2,2a,2b モータ駆動装置、110 商用電源、120 リアクトル、130 整流部、131~134 整流素子、200 平滑部、210 コンデンサ、310 インバータ、311a~311f スイッチング素子、312a~312f 還流ダイオード、313a,313b,501,502 電流検出部、314 モータ、315 圧縮機、381 フィルタ、382 振幅換算部、383 減算部、384~387 フーリエ係数演算部、388~391 PID制御部、392,392b 交流復元部、400,400a,400b,400c 制御部、401 回転子位置推定部、402 速度制御部、403 弱め磁束制御部、404 電流制御部、405,406 座標変換部、407 PWM信号生成部、408,408a,408b,408c q軸電流脈動演算部、409 加算部、503 電圧検出部、900 冷凍サイクル適用機器、902 四方弁、904 圧縮機構、906 室内熱交換器、908 膨張弁、910 室外熱交換器、912 冷媒配管。
1,1a, 1b power converter, 2,2a, 2b motor drive, 110 commercial power supply, 120 reactor, 130 rectifier, 131-134 rectifier, 200 smoother, 210 capacitor, 310 inverter, 311a-311f switching element , 312a to 312f Freewheeling diode, 313a, 313b, 501,502 Current detector, 314 motor, 315 compressor, 381 filter, 382 amplitude conversion unit, 383 subtraction unit, 384 to 387 Fourier coefficient calculation unit, 388 to 391 PID control Unit, 392,392b AC restoration unit, 400,400a, 400b, 400c control unit, 401 rotor position estimation unit, 402 speed control unit, 403 weakening magnetic flux control unit, 404 current control unit, 405, 406 coordinate conversion unit, 407 PWM signal generation unit, 408, 408a, 408b, 408c q-axis current pulsation calculation unit, 409 addition unit, 503 voltage detection unit, 900 refrigeration cycle applicable equipment, 902 four-way valve, 904 compression mechanism, 906 indoor heat exchanger, 908 expansion Valve, 910 outdoor heat exchanger, 912 refrigerant pipe.
Claims (10)
- 商用電源から供給される第1の交流電力を整流する整流部と、
前記整流部の出力端に接続されるコンデンサと、
前記コンデンサの両端に接続され、第2の交流電力を生成してモータに出力するインバータと、
前記コンデンサの電力状態を検出する検出部と、
前記検出部の検出値に応じた脈動が前記モータの駆動パターンに重畳されるように前記インバータの動作を制御し、前記コンデンサの充放電電流を抑制する制御部と、
を備える電力変換装置。 A rectifying unit that rectifies the first AC power supplied from a commercial power source,
The capacitor connected to the output end of the rectifying unit and
An inverter connected to both ends of the capacitor to generate a second AC power and output it to the motor.
A detector that detects the power status of the capacitor and
A control unit that controls the operation of the inverter so that the pulsation according to the detection value of the detection unit is superimposed on the drive pattern of the motor, and suppresses the charge / discharge current of the capacitor.
A power converter equipped with. - 前記検出部は、前記整流部から前記コンデンサへ流入される入力電流を検出し、
前記制御部は、前記入力電流と前記コンデンサから前記インバータへの出力電流との差分が小さくなるように、前記モータの入出力電力の関係から前記モータのq軸電流指令を制御する、
請求項1に記載の電力変換装置。 The detection unit detects the input current flowing from the rectifying unit to the capacitor, and detects the input current.
The control unit controls the q-axis current command of the motor from the relationship between the input / output power of the motor so that the difference between the input current and the output current from the capacitor to the inverter becomes small.
The power conversion device according to claim 1. - 前記検出部は、前記充放電電流を検出し、
前記制御部は、前記充放電電流に含まれる特定の周波数の脈動成分が減少する前記駆動パターンを自動探索する、
請求項1または2に記載の電力変換装置。 The detection unit detects the charge / discharge current and
The control unit automatically searches for the drive pattern in which the pulsating component of a specific frequency included in the charge / discharge current is reduced.
The power conversion device according to claim 1 or 2. - 前記検出部は、前記コンデンサの両端電圧である直流母線電圧を検出し、
前記制御部は、前記直流母線電圧に含まれる特定の周波数の脈動成分が減少する前記駆動パターンを自動探索する、
請求項1から3のいずれか1つに記載の電力変換装置。 The detection unit detects the DC bus voltage, which is the voltage across the capacitor, and detects it.
The control unit automatically searches for the drive pattern in which the pulsating component of a specific frequency included in the DC bus voltage is reduced.
The power conversion device according to any one of claims 1 to 3. - 前記制御部は、
前記検出値と指令値または目標値との偏差に含まれる、前記商用電源の電源周波数に応じた成分の振幅を演算するフーリエ係数演算部と、
前記偏差を収束させる比例積分微分制御部と、
前記比例積分微分制御部からの出力を交流成分に復元し、前記コンデンサの充放電電流を抑制するための脈動分の指令を生成する交流復元部と、
を備える請求項3または4に記載の電力変換装置。 The control unit
A Fourier coefficient calculation unit that calculates the amplitude of the component according to the power frequency of the commercial power supply, which is included in the deviation between the detected value and the command value or the target value.
A proportional integral differential control unit that converges the deviation, and
An AC restoration unit that restores the output from the proportional integral differential control unit to an AC component and generates a command for the pulsation to suppress the charge / discharge current of the capacitor.
The power conversion device according to claim 3 or 4. - 前記制御部は、前記モータを含む負荷の運転条件ごとに設定された前記コンデンサの充放電電流を抑制するための脈動パターンを記憶し、前記負荷の運転条件に応じた前記脈動パターンを用いて前記コンデンサの充放電電流を抑制するための脈動分の指令を生成し、前記インバータの動作を制御する、
請求項1から5のいずれか1つに記載の電力変換装置。 The control unit stores a pulsation pattern for suppressing the charge / discharge current of the capacitor set for each operating condition of the load including the motor, and uses the pulsating pattern according to the operating condition of the load. Generates a pulsating command to suppress the charge / discharge current of the capacitor and controls the operation of the inverter.
The power conversion device according to any one of claims 1 to 5. - 前記検出部は、前記コンデンサの充放電電流および前記コンデンサの両端電圧である直流母線電圧のうち少なくとも1つを検出し、
前記制御部は、前記検出部の検出値に含まれる特定の周波数の脈動成分が減少する前記脈動パターンを自動探索し、前記運転条件ごとに設定された前記脈動パターンとして記憶する、
請求項6に記載の電力変換装置。 The detection unit detects at least one of the charge / discharge current of the capacitor and the DC bus voltage which is the voltage across the capacitor.
The control unit automatically searches for the pulsation pattern in which the pulsation component of a specific frequency included in the detection value of the detection unit decreases, and stores it as the pulsation pattern set for each operation condition.
The power conversion device according to claim 6. - 前記モータが周期的な負荷トルク脈動を有する負荷を駆動する場合、
前記制御部は、前記負荷トルク脈動に起因する速度脈動を抑制する、
請求項1から7のいずれか1つに記載の電力変換装置。 When the motor drives a load with periodic load torque pulsations
The control unit suppresses the speed pulsation caused by the load torque pulsation.
The power conversion device according to any one of claims 1 to 7. - 請求項1から8のいずれか1つに記載の電力変換装置を備えるモータ駆動装置。 A motor drive device including the power conversion device according to any one of claims 1 to 8.
- 請求項1から8のいずれか1つに記載の電力変換装置を備える冷凍サイクル適用機器。 A refrigeration cycle applicable device provided with the power conversion device according to any one of claims 1 to 8.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2021/000196 WO2022149210A1 (en) | 2021-01-06 | 2021-01-06 | Power conversion device, motor driving device, and refrigeration-cycle application device |
| JP2022573836A JP7499887B2 (en) | 2021-01-06 | 2021-01-06 | Power conversion devices, motor drives, and refrigeration cycle application devices |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2021/000196 WO2022149210A1 (en) | 2021-01-06 | 2021-01-06 | Power conversion device, motor driving device, and refrigeration-cycle application device |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2022149210A1 true WO2022149210A1 (en) | 2022-07-14 |
Family
ID=82358097
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2021/000196 WO2022149210A1 (en) | 2021-01-06 | 2021-01-06 | Power conversion device, motor driving device, and refrigeration-cycle application device |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP7499887B2 (en) |
| WO (1) | WO2022149210A1 (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2024232029A1 (en) * | 2023-05-10 | 2024-11-14 | 三菱電機株式会社 | Power conversion apparatus and motor drive system |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002354826A (en) * | 2001-05-24 | 2002-12-06 | Isao Takahashi | Inverter controlling method and its appartaus |
| JP2009232591A (en) * | 2008-03-24 | 2009-10-08 | Mitsubishi Electric Corp | Motor driving device and air conditioner |
| WO2018131273A1 (en) * | 2017-01-11 | 2018-07-19 | 日立ジョンソンコントロールズ空調株式会社 | Motor drive device and refrigeration apparatus |
-
2021
- 2021-01-06 JP JP2022573836A patent/JP7499887B2/en active Active
- 2021-01-06 WO PCT/JP2021/000196 patent/WO2022149210A1/en active Application Filing
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002354826A (en) * | 2001-05-24 | 2002-12-06 | Isao Takahashi | Inverter controlling method and its appartaus |
| JP2009232591A (en) * | 2008-03-24 | 2009-10-08 | Mitsubishi Electric Corp | Motor driving device and air conditioner |
| WO2018131273A1 (en) * | 2017-01-11 | 2018-07-19 | 日立ジョンソンコントロールズ空調株式会社 | Motor drive device and refrigeration apparatus |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2024232029A1 (en) * | 2023-05-10 | 2024-11-14 | 三菱電機株式会社 | Power conversion apparatus and motor drive system |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2022149210A1 (en) | 2022-07-14 |
| JP7499887B2 (en) | 2024-06-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5047021B2 (en) | Electric motor drive device and air conditioner | |
| WO2022149210A1 (en) | Power conversion device, motor driving device, and refrigeration-cycle application device | |
| JP2003164179A (en) | Motor drive unit and motor drive method | |
| WO2022172418A1 (en) | Power conversion device, motor driving device, and refrigeration-cycle application instrument | |
| US20240372498A1 (en) | Power converter, motor drive device, and refrigeration cycle application apparatus | |
| US20240405694A1 (en) | Power converting apparatus, motor drive unit, and refrigeration cycle-incorporating device | |
| WO2023073870A1 (en) | Power conversion device, motor driving device, and refrigeration-cycle application instrument | |
| US20240014759A1 (en) | Control device, power conversion apparatus, motor drive unit, and applied refrigeration cycle apparatus | |
| WO2023100321A1 (en) | Power conversion device, motor drive device, and apparatus applicable to refrigeration cycle | |
| JP2019170119A (en) | Refrigeration cycle device | |
| WO2022149213A1 (en) | Power conversion device, motor drive and refrigeration cycle application equipment | |
| WO2023105689A1 (en) | Power conversion device, electric motor drive device, and refrigeration cycle application device | |
| JP7325671B2 (en) | Power conversion device, motor drive device and refrigeration cycle application equipment | |
| KR102010388B1 (en) | Power converting apparatus and air conditioner including the same | |
| WO2024075210A1 (en) | Power conversion device, motor drive device, and refrigeration cycle application device | |
| JP7466794B2 (en) | Power conversion devices, motor drives, and refrigeration cycle application devices | |
| WO2023067774A1 (en) | Power conversion device, motor driving device, and refrigeration-cycle application instrument | |
| WO2023067723A1 (en) | Power conversion device, electric motor drive device, and refrigeration cycle-applicable apparatus | |
| WO2023067810A1 (en) | Power conversion device, motor drive device, and refrigeration-cycle application apparatus | |
| WO2024184960A1 (en) | Electric power conversion device and air conditioner | |
| WO2023067724A1 (en) | Power conversion device, electric motor drive device, and refrigeration cycle application apparatus | |
| WO2023100305A1 (en) | Power conversion device, motor driving device, and refrigeration-cycle application instrument | |
| WO2024075163A1 (en) | Electric power conversion device, motor drive device, and refrigeration cycle application device | |
| WO2023105676A1 (en) | Power conversion device, motor drive device, and equipment for refrigeration cycle applications | |
| JPH0799800A (en) | Inverter-driven air conditioner |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 21917438 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2022573836 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 21917438 Country of ref document: EP Kind code of ref document: A1 |