WO2022075228A1 - 真空ポンプ、および真空ポンプに備わる回転円筒体 - Google Patents
真空ポンプ、および真空ポンプに備わる回転円筒体 Download PDFInfo
- Publication number
- WO2022075228A1 WO2022075228A1 PCT/JP2021/036488 JP2021036488W WO2022075228A1 WO 2022075228 A1 WO2022075228 A1 WO 2022075228A1 JP 2021036488 W JP2021036488 W JP 2021036488W WO 2022075228 A1 WO2022075228 A1 WO 2022075228A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- vacuum pump
- diameter
- slow
- reduced diameter
- reduced
- Prior art date
Links
- 230000007246 mechanism Effects 0.000 claims description 15
- 230000007423 decrease Effects 0.000 abstract description 5
- 239000007789 gas Substances 0.000 description 23
- 125000006850 spacer group Chemical group 0.000 description 20
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical compound [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 12
- 229910052751 metal Inorganic materials 0.000 description 12
- 239000002184 metal Substances 0.000 description 12
- 230000002093 peripheral effect Effects 0.000 description 11
- 238000001514 detection method Methods 0.000 description 9
- 238000004804 winding Methods 0.000 description 9
- 238000010586 diagram Methods 0.000 description 6
- 229910052742 iron Inorganic materials 0.000 description 6
- 238000000034 method Methods 0.000 description 5
- 230000008569 process Effects 0.000 description 5
- 229910052782 aluminium Inorganic materials 0.000 description 4
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 4
- 230000005284 excitation Effects 0.000 description 4
- 239000004065 semiconductor Substances 0.000 description 4
- 239000010935 stainless steel Substances 0.000 description 4
- 229910001220 stainless steel Inorganic materials 0.000 description 4
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 3
- 238000001816 cooling Methods 0.000 description 3
- 229910052802 copper Inorganic materials 0.000 description 3
- 239000010949 copper Substances 0.000 description 3
- 238000010926 purge Methods 0.000 description 3
- 229910045601 alloy Inorganic materials 0.000 description 2
- 239000000956 alloy Substances 0.000 description 2
- 238000006073 displacement reaction Methods 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 150000002739 metals Chemical class 0.000 description 2
- 230000035699 permeability Effects 0.000 description 2
- 230000008929 regeneration Effects 0.000 description 2
- 238000011069 regeneration method Methods 0.000 description 2
- 239000007787 solid Substances 0.000 description 2
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 2
- 229910003902 SiCl 4 Inorganic materials 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 239000003990 capacitor Substances 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 238000005530 etching Methods 0.000 description 1
- 238000010438 heat treatment Methods 0.000 description 1
- 230000007774 longterm Effects 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 239000000047 product Substances 0.000 description 1
- 230000001681 protective effect Effects 0.000 description 1
- 230000005855 radiation Effects 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 239000012265 solid product Substances 0.000 description 1
- 230000000087 stabilizing effect Effects 0.000 description 1
- 239000000758 substrate Substances 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
Images






Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D19/00—Axial-flow pumps
- F04D19/02—Multi-stage pumps
- F04D19/04—Multi-stage pumps specially adapted to the production of a high vacuum, e.g. molecular pumps
- F04D19/042—Turbomolecular vacuum pumps
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D19/00—Axial-flow pumps
- F04D19/02—Multi-stage pumps
- F04D19/04—Multi-stage pumps specially adapted to the production of a high vacuum, e.g. molecular pumps
- F04D19/044—Holweck-type pumps
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D29/00—Details, component parts, or accessories
- F04D29/26—Rotors specially for elastic fluids
- F04D29/32—Rotors specially for elastic fluids for axial flow pumps
- F04D29/321—Rotors specially for elastic fluids for axial flow pumps for axial flow compressors
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D29/00—Details, component parts, or accessories
- F04D29/40—Casings; Connections of working fluid
- F04D29/52—Casings; Connections of working fluid for axial pumps
- F04D29/522—Casings; Connections of working fluid for axial pumps especially adapted for elastic fluid pumps
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F05—INDEXING SCHEMES RELATING TO ENGINES OR PUMPS IN VARIOUS SUBCLASSES OF CLASSES F01-F04
- F05D—INDEXING SCHEME FOR ASPECTS RELATING TO NON-POSITIVE-DISPLACEMENT MACHINES OR ENGINES, GAS-TURBINES OR JET-PROPULSION PLANTS
- F05D2250/00—Geometry
- F05D2250/20—Three-dimensional
- F05D2250/29—Three-dimensional machined; miscellaneous
- F05D2250/292—Three-dimensional machined; miscellaneous tapered
Definitions
- the present invention relates to a vacuum pump and a rotating cylinder provided in the vacuum pump. More specifically, the present invention relates to a vacuum pump that reduces the stress applied to the rotating cylinder, and a rotating cylinder provided in the vacuum pump.
- Some vacuum pumps for performing vacuum exhaust treatment in the arranged vacuum chamber are provided with a rotating body and a thread groove exhaust element (thread groove type exhaust mechanism / thread groove pump portion).
- the vacuum pump provided with the threaded groove exhaust element is provided with a rotating cylinder (rotor cylindrical portion) without a rotating blade on the lower side of the rotating body on which the rotating blade is arranged, and compresses the gas in the threaded groove exhaust element. It is configured to be used.
- a vacuum pump including a vacuum pump provided with such a rotor cylindrical portion a stress is generated on the inner diameter side of the rotor cylindrical portion due to centrifugal force, and the stress may exceed the design standard value.
- FIG. 9 is a diagram for explaining the conventional turbo molecular pump 100.
- a cylindrical portion 102d is disposed so as to face axially with a threaded spacer 131 via a gap (clearance).
- a creep phenomenon occurs in which the cylindrical portion 102d is gradually deformed and expanded due to long-term motion at a high temperature.
- the creep life which is the period until the specified value of the clearance between the threaded spacer 131 and the cylindrical portion 102d becomes smaller due to this creep phenomenon, should be as long as possible from the viewpoint of maintenance cost.
- Patent Document 1 the outer diameters of the rotor blades are set to the exhaust port side and the intake port side for the purpose of preventing local stress and temperature rise in the rotor blade and the portion supporting the rotary blade even when the rotor is rotated at high speed. It describes the technology to make it different in.
- the stress is reduced by lowering the number of rotations of the rotating body (rotor blade / rotating cylinder). However, if the rotation speed of the rotating body is lowered, the exhaust performance is lowered.
- an exterior body in which an intake port and an exhaust port are formed, a screw groove type exhaust mechanism fixed to the exterior body and having a thread groove, and a thread groove type exhaust mechanism contained in the exterior body and rotatably formed. It has a supported rotating shaft, a facing portion that is disposed on the rotating shaft and faces the threaded groove type exhaust mechanism via a gap, and an extended portion that extends downstream from the threaded groove type exhaust mechanism.
- a vacuum pump comprising: a reduced diameter portion having an outer diameter smaller than the outer diameter of the facing portion in the stretched portion, and a rotating cylindrical body having a slow-reduced diameter structure for reducing stress concentration. do.
- the invention of the present application according to claim 2 provides the vacuum pump according to claim 1, wherein the slow-reducing diameter structure is a tapered structure.
- the vacuum pump according to the first aspect wherein the slow-reducing diameter structure has a curved surface shape.
- the vacuum pump according to any one of claims 1 to 3 wherein the slow-reduced diameter structure is included in the reduced-diameter portion.
- a rotating cylinder of a vacuum pump provided with a supported rotating shaft, which is arranged on the rotating shaft and faces the threaded groove type exhaust mechanism via a gap and from the threaded groove type exhaust mechanism. Also characterized by having a stretched portion extended to the downstream side, a reduced diameter portion having an outer diameter smaller than the outer diameter of the facing portion in the stretched portion, and a slow-reduced diameter structure for reducing stress concentration.
- a rotating cylinder is provided.
- the stress of the portion of the rotating cylinder due to the creep life can be reduced without lowering the rotation speed. Performance can be maintained or improved.
- a reduced diameter portion having a smaller outer diameter than the portion (opposing portion) on the intake port side of the rotor cylindrical portion and facing the thread groove exhaust element is provided in the extended portion of the rotor cylindrical portion.
- a slow-reduced diameter structure is adopted for the stretched portion.
- This slowly reduced diameter structure means a structure in which the diameter is gradually reduced.
- the stress generated on the inner diameter side during rotation becomes smaller as the outer diameter becomes smaller. At least, the stress generated on the inner diameter side of the cylindrical portion can be reduced.
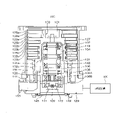
- FIG. 1 A vertical sectional view of the turbo molecular pump 100 is shown in FIG.
- an intake port 101 is formed at the upper end of a cylindrical outer cylinder 127.
- a rotating body 103 in which a plurality of rotary blades 102 (102a, 102b, 102c ...), Which are turbine blades for sucking and exhausting gas, are radially and multistagely formed on the peripheral portion inside the outer cylinder 127.
- a rotor shaft 113 is attached to the center of the rotating body 103, and the rotor shaft 113 is floated and supported and position-controlled in the air by, for example, a 5-axis controlled magnetic bearing.
- the upper radial electromagnet 104 In the upper radial electromagnet 104, four electromagnets are arranged in pairs on the X-axis and the Y-axis.
- Four upper radial sensors 107 are provided in the vicinity of the upper radial electromagnet 104 and corresponding to each of the upper radial electromagnets 104.
- the upper radial sensor 107 for example, an inductance sensor having a conduction winding, an eddy current sensor, or the like is used, and the position of the rotor shaft 113 is based on the change in the inductance of the conduction winding that changes according to the position of the rotor shaft 113. Is detected.
- the upper radial sensor 107 is configured to detect the radial displacement of the rotor shaft 113, that is, the rotating body 103 fixed to the rotor shaft 113, and send it to the control device 200.
- a compensator circuit having a PID adjustment function generates an excitation control command signal of the upper radial electromagnet 104 based on a position signal detected by the upper radial sensor 107, and is shown in FIG.
- the amplifier circuit 150 (described later) excites and controls the upper radial electromagnet 104 based on this excitation control command signal, so that the upper radial position of the rotor shaft 113 is adjusted.
- the rotor shaft 113 is made of a high magnetic permeability material (iron, stainless steel, etc.) and is attracted by the magnetic force of the upper radial electromagnet 104. Such adjustment is performed independently in the X-axis direction and the Y-axis direction, respectively. Further, the lower radial electric magnet 105 and the lower radial sensor 108 are arranged in the same manner as the upper radial electric magnet 104 and the upper radial sensor 107, and the lower radial position of the rotor shaft 113 is set to the upper radial position. It is adjusted in the same way as.
- the axial electromagnets 106A and 106B are arranged so as to vertically sandwich the disk-shaped metal disk 111 provided in the lower part of the rotor shaft 113.
- the metal disk 111 is made of a high magnetic permeability material such as iron.
- An axial sensor 109 is provided to detect the axial displacement of the rotor shaft 113, and the axial position signal thereof is configured to be sent to the control device 200.
- a compensation circuit having a PID adjustment function sends an excitation control command signal for each of the axial electromagnet 106A and the axial electromagnet 106B based on the axial position signal detected by the axial sensor 109.
- the generated amplifier circuit 150 excites and controls the axial electromagnet 106A and the axial electromagnet 106B based on these excitation control command signals, so that the axial electromagnet 106A attracts the metal disk 111 upward by magnetic force.
- the axial electromagnet 106B attracts the metal disk 111 downward, and the axial position of the rotor shaft 113 is adjusted.
- control device 200 appropriately adjusts the magnetic force exerted by the axial electromagnets 106A and 106B on the metal disk 111, magnetically levitates the rotor shaft 113 in the axial direction, and holds the rotor shaft 113 in the space in a non-contact manner.
- the amplifier circuit 150 that excites and controls the upper radial electromagnet 104, the lower radial electromagnet 105, and the axial electromagnets 106A and 106B will be described later.
- the motor 121 includes a plurality of magnetic poles arranged in a circumferential shape so as to surround the rotor shaft 113. Each magnetic pole is controlled by the control device 200 so as to rotationally drive the rotor shaft 113 via an electromagnetic force acting on the rotor shaft 113. Further, the motor 121 incorporates a rotation speed sensor such as a Hall element, a resolver, an encoder, etc. (not shown), and the rotation speed of the rotor shaft 113 is detected by the detection signal of the rotation speed sensor.
- a rotation speed sensor such as a Hall element, a resolver, an encoder, etc.
- a phase sensor (not shown) is attached near the lower radial sensor 108 to detect the phase of rotation of the rotor shaft 113.
- the control device 200 detects the position of the magnetic pole by using both the detection signals of the phase sensor and the rotation speed sensor.
- a plurality of fixed wings 123 (123a, 123b, 123c ...) are arranged with a slight gap between the rotary wings 102 (102a, 102b, 102c ).
- the rotary blades 102 (102a, 102b, 102c %) are formed so as to be inclined by a predetermined angle from a plane perpendicular to the axis of the rotor shaft 113 in order to transfer exhaust gas molecules downward by collision. There is.
- the fixed blade 123 is also formed so as to be inclined by a predetermined angle from a plane perpendicular to the axis of the rotor shaft 113, and is arranged alternately with the steps of the rotary blade 102 toward the inside of the outer cylinder 127. ing.
- the outer peripheral end of the fixed wing 123 is supported in a state of being fitted between a plurality of stacked fixed wing spacers 125 (125a, 125b, 125c ).
- the fixed wing spacer 125 is a ring-shaped member, and is composed of, for example, a metal such as aluminum, iron, stainless steel, or copper, or a metal such as an alloy containing these metals as a component.
- An outer cylinder 127 is fixed to the outer periphery of the fixed wing spacer 125 with a slight gap.
- a base portion 129 is arranged at the bottom of the outer cylinder 127.
- An exhaust port 133 is formed in the base portion 129 and communicates with the outside. The exhaust gas that has entered the intake port 101 from the chamber side and has been transferred to the base portion 129 is sent to the exhaust port 133.
- a threaded spacer 131 is arranged between the lower portion of the fixed wing spacer 125 and the base portion 129.
- the threaded spacer 131 is a cylindrical member made of a metal such as aluminum, copper, stainless steel, iron, or an alloy containing these metals as a component, and has a plurality of spiral thread grooves 131a on the inner peripheral surface thereof. It is engraved.
- the direction of the spiral of the thread groove 131a is the direction in which the molecules of the exhaust gas are transferred toward the exhaust port 133 when the molecules of the exhaust gas move in the rotation direction of the rotating body 103.
- a cylindrical portion 102d is hung at the lowermost portion of the rotating body 103 following the rotary blades 102 (102a, 102b, 102c ).
- the outer peripheral surface of the cylindrical portion 102d is cylindrical and projects toward the inner peripheral surface of the threaded spacer 131, and is brought close to the inner peripheral surface of the threaded spacer 131 with a predetermined gap. There is.
- the exhaust gas transferred to the screw groove 131a by the rotary blade 102 and the fixed blade 123 is sent to the base portion 129 while being guided by the screw groove 131a.
- the base portion 129 is a disk-shaped member constituting the base portion of the turbo molecular pump 100, and is generally made of a metal such as iron, aluminum, or stainless steel. Since the base portion 129 physically holds the turbo molecular pump 100 and also has the function of a heat conduction path, a metal having rigidity such as iron, aluminum or copper and having high thermal conductivity is used. Is desirable.
- the fixed wing spacers 125 are joined to each other at the outer peripheral portion, and transmit the heat received from the rotary wing 102 by the fixed wing 123 and the frictional heat generated when the exhaust gas comes into contact with the fixed wing 123 to the outside.
- the threaded spacer 131 is arranged on the outer periphery of the cylindrical portion 102d of the rotating body 103, and the screw groove 131a is engraved on the inner peripheral surface of the threaded spacer 131.
- a screw groove is carved on the outer peripheral surface of the cylindrical portion 102d, and a spacer having a cylindrical inner peripheral surface is arranged around the thread groove.
- the gas sucked from the intake port 101 is the upper radial electromagnet 104, the upper radial sensor 107, the motor 121, the lower radial electromagnet 105, the lower radial sensor 108, and the shaft.
- the circumference of the electrical component is covered with a stator column 122 so that it does not invade the electrical component composed of the directional electromagnets 106A, 106B, the axial sensor 109, etc., and the inside of the stator column 122 is kept at a predetermined pressure by a purge gas. It may hang down.
- a pipe (not shown) is arranged in the base portion 129, and purge gas is introduced through this pipe.
- the introduced purge gas is sent to the exhaust port 133 through the gaps between the protective bearing 120 and the rotor shaft 113, between the rotor and the stator of the motor 121, and between the stator column 122 and the inner peripheral side cylindrical portion of the rotary blade 102.
- the turbo molecular pump 100 requires identification of a model and control based on individually adjusted unique parameters (for example, various characteristics corresponding to the model).
- the turbo molecular pump 100 includes an electronic circuit unit 141 in its main body.
- the electronic circuit unit 141 is composed of a semiconductor memory such as EEP-ROM, electronic components such as semiconductor elements for accessing the semiconductor memory, and a substrate 143 for mounting them.
- the electronic circuit portion 141 is housed in a lower portion of a rotational speed sensor (not shown) near the center of a base portion 129 constituting the lower portion of the turbo molecular pump 100, and is closed by an airtight bottom lid 145.
- some of the process gases introduced into the chamber have the property of becoming solid when the pressure becomes higher than the predetermined value or the temperature becomes lower than the predetermined value.
- the pressure of the exhaust gas is the lowest at the intake port 101 and the highest at the exhaust port 133. If the pressure rises above a predetermined value or the temperature drops below a predetermined value while the process gas is being transferred from the intake port 101 to the exhaust port 133, the process gas becomes a solid state and becomes a turbo molecule. It adheres to the inside of the pump 100 and accumulates.
- SiCl 4 when used as a process gas in an Al etching apparatus, it is a solid product (for example, at a low vacuum (760 [torr] to 10-2 [torr]) and at a low temperature (about 20 [° C.]). It can be seen from the vapor pressure curve that AlCl 3 ) is deposited and adheres to the inside of the turbo molecular pump 100. As a result, when a deposit of process gas is deposited inside the turbo molecular pump 100, this deposit narrows the pump flow path and causes the performance of the turbo molecular pump 100 to deteriorate.
- the above-mentioned product was in a state of being easily solidified and adhered in a high pressure portion near the exhaust port 133 and the screwed spacer 131.
- a heater or an annular water cooling tube 149 (not shown) is wound around the outer periphery of the base portion 129 or the like, and a temperature sensor (for example, a thermistor) (for example, not shown) is embedded in the base portion 129, for example. Based on the signal of this temperature sensor, the heating of the heater and the control of cooling by the water cooling tube 149 (hereinafter referred to as TMS; Temperature Management System) are performed so as to keep the temperature of the base portion 129 at a constant high temperature (set temperature). It has been.
- TMS Temperature Management System
- one end of the electromagnet winding 151 constituting the upper radial electromagnet 104 and the like is connected to the positive electrode 171a of the power supply 171 via the transistor 161 and the other end thereof is the current detection circuit 181 and the transistor 162. It is connected to the negative electrode 171b of the power supply 171 via.
- the transistors 161 and 162 are so-called power MOSFETs, and have a structure in which a diode is connected between the source and the drain thereof.
- the cathode terminal 161a of the diode is connected to the positive electrode 171a, and the anode terminal 161b is connected to one end of the electromagnet winding 151. Further, in the transistor 162, the cathode terminal 162a of the diode is connected to the current detection circuit 181 and the anode terminal 162b is connected to the negative electrode 171b.
- the diode 165 for current regeneration its cathode terminal 165a is connected to one end of the electromagnet winding 151, and its anode terminal 165b is connected to the negative electrode 171b.
- the cathode terminal 166a is connected to the positive electrode 171a, and the anode terminal 166b is connected to the other end of the electromagnet winding 151 via the current detection circuit 181. It has become so.
- the current detection circuit 181 is composed of, for example, a hall sensor type current sensor or an electric resistance element.
- the amplifier circuit 150 configured as described above corresponds to one electromagnet. Therefore, when the magnetic bearing is controlled by 5 axes and there are a total of 10 electromagnets 104, 105, 106A, and 106B, the same amplifier circuit 150 is configured for each of the electromagnets, and 10 amplifier circuits are provided for the power supply 171. 150 are connected in parallel.
- the amplifier control circuit 191 is composed of, for example, a digital signal processor unit (hereinafter referred to as a DSP unit) (hereinafter, referred to as a DSP unit) of the control device 200, and the amplifier control circuit 191 switches on / off of the transistors 161 and 162. It has become like.
- a DSP unit digital signal processor unit
- the amplifier control circuit 191 is adapted to compare the current value detected by the current detection circuit 181 (a signal reflecting this current value is referred to as a current detection signal 191c) with a predetermined current command value. Then, based on this comparison result, the magnitude of the pulse width (pulse width time Tp1 and Tp2) generated in the control cycle Ts, which is one cycle by PWM control, is determined. As a result, the gate drive signals 191a and 191b having this pulse width are output from the amplifier control circuit 191 to the gate terminals of the transistors 161 and 162.
- a high voltage of, for example, about 50 V is used as the power supply 171 so that the current flowing through the electromagnet winding 151 can be rapidly increased (or decreased).
- a normal capacitor is normally connected between the positive electrode 171a and the negative electrode 171b of the power supply 171 for the purpose of stabilizing the power supply 171 (not shown).
- the electromagnet current iL when both the transistors 161 and 162 are turned on, the current flowing through the electromagnet winding 151 (hereinafter referred to as the electromagnet current iL) increases, and when both are turned off, the electromagnet current iL decreases.
- flywheel current when one of the transistors 161 and 162 is turned on and the other is turned off, the so-called flywheel current is maintained.
- the hysteresis loss in the amplifier circuit 150 can be reduced, and the power consumption of the entire circuit can be suppressed to a low level.
- the transistors 161 and 162 by controlling the transistors 161 and 162 in this way, it is possible to reduce high frequency noise such as harmonics generated in the turbo molecular pump 100. Further, by measuring this flywheel current with the current detection circuit 181 it becomes possible to detect the electromagnet current iL flowing through the electromagnet winding 151.
- the transistors 161 and 162 are used only once in the control cycle Ts (for example, 100 ⁇ s) for the time corresponding to the pulse width time Tp1. Turn both on. Therefore, the electromagnet current iL during this period increases from the positive electrode 171a to the negative electrode 171b toward the current value iLmax (not shown) that can flow through the transistors 161 and 162.
- both the transistors 161 and 162 are turned off only once in the control cycle Ts for the time corresponding to the pulse width time Tp2. .. Therefore, the electromagnet current iL during this period decreases from the negative electrode 171b to the positive electrode 171a toward the current value iLmin (not shown) that can be regenerated via the diodes 165 and 166.
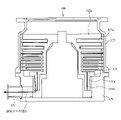
- FIG. 5 is a diagram for explaining the outline of the turbo molecular pump 100 according to the first embodiment.
- FIG. 6 is a diagram for explaining a facing portion 10t and a stretched portion 11 (slowly reduced diameter structure 11a and reduced diameter portion 50) in the cylindrical portion 102d of the turbo molecular pump 100 shown in FIG.
- FIG. 7 is an enlarged view of the opposed portion 10t, the stretched portion 11, the loosely reduced diameter structure 11a, and the reduced diameter portion 50 in the cylindrical portion 102d.
- the cylindrical portion 102d is a stretched portion extending toward the exhaust port 133 from the threaded spacer 131 and the facing portion 10t facing the threaded spacer 131 in the axial direction with a predetermined gap.
- the stretched portion 11 is composed of a slow-reduced diameter structure 11a and a reduced-diameter portion 50.
- the inner diameter of the facing portion 10t in the cylindrical portion 102d will be described as r, and the outer diameter will be described as Rt.
- the outer diameter of the lower end portion (exhaust port 133 side) and the reduced diameter portion 50 of the slow-reduced diameter structure 11a will be described as Rs, and the gradual outer diameter of the slow-reduced diameter structure 11a will be described as m. ..
- “gradual outer diameter” is used to mean "outer diameter that changes little by little”.
- the cylindrical portion 102d provided in the turbo molecular pump 100 is the cylindrical portion 102d (opposing portion 10t) of the portion not the stretched portion 11 in the stretched portion 11 stretched toward the exhaust port 133 side from the threaded spacer 131.
- a slow-reduced diameter structure 11a having a gradual outer diameter m smaller than the outer diameter Rt is formed.
- the value of the gradual outer diameter m gradually decreases from the intake port side to the exhaust port side (that is, the outer diameter gradually changes).
- the cylindrical portion 102d has a portion (relaxed diameter structure 11a) having a gradient of a predetermined angle ⁇ on the outer diameter side of the stretched portion 11.
- This gradient can be configured, for example, by forming a tapered shape on the outer diameter side of the stretched portion 11.
- the starting point (starting point) of the stretched portion 11 and the starting point of the slow-reduced diameter structure 11a are configured to match, but the present invention is not limited to this. That is, a part of the stretched portion 11 stretched from the facing portion 10t on the intake port 101 side has an outer diameter Rt having the same size as the facing portion 10t, and has a gradual outer diameter m that is continuously reduced in diameter.
- a configuration may be provided in which a loose diameter structure 11a is provided. That is, the slow-reduced diameter structure 11a may be configured to be formed in at least a part of the stretched portion 11.
- the outer diameter Rs of the lower end portion (exhaust port 133 side) of the stretched portion 11 and the value of the gradual outer diameter m at the lowermost end portion (exhaust port 133 side) of the slow-reduced diameter structure 11a match.
- the value of the gradual outer diameter m at the lowermost end portion of the slow-reduced diameter structure 11a and the value of the inner diameter r of the facing portion 10t may be the same.
- the stretched portion 11 has a function of reducing the stress generated at the lower end of the cylindrical portion 102d, but from the viewpoint of stress reduction, by providing the reduced diameter portion 50 and the loosely reduced diameter structure 11a, the effect of further reducing the stress is achieved. There is. Therefore, within the range of dimensional restrictions, the diameter-reduced portion 50 and the stretched portion 11 due to the slow-reduced diameter structure 11a are provided.
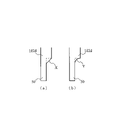
- FIG. 8 is a diagram showing a connection mode of the reduced diameter portion 50 with the slowly reduced diameter structure 11a. Since stress is likely to be concentrated at the connection portion between the loosely reduced diameter structure 11a and the reduced diameter portion 50, it is preferable to have a structure in which stress concentration is unlikely to occur.
- a taper structure X is adopted for the slow-reduction diameter structure 11a.
- the corner R shape Y is adopted for the loose diameter structure 11a.
- Even structures other than those shown in FIGS. 8A and 8B can be used in the present embodiment as long as they can reduce stress concentration.
- the gradient of the slow-reduced diameter structure 11a is formed in a linear shape in the cross section, but the present invention is not limited to this.
- the gradient of the slow-reduced diameter structure 11a may be formed in a curved shape in a cross section.
- the stress applied to the inner diameter side of the slow-reduced diameter structure 11a which is a portion caused by the creep life in the cylindrical portion 102d, is reduced without lowering the rotation speed of the rotating body including the cylindrical portion 102d. can do. Further, since the creep phenomenon can be prevented without lowering the rotation speed, it is possible to prevent the exhaust performance of the turbo molecular pump 100 from being deteriorated by lowering the rotation speed. Alternatively, since the rotation speed of the rotor portion including the cylindrical portion 102d can be increased by this configuration, the exhaust performance of the turbo molecular pump 100 can be improved.
- the diameter-reduced portion 50 is described assuming that the outer diameter of the diameter-reduced portion 50 is constant in Rs, but the diameter is not limited to this, and the diameter may be further reduced toward the lower end. Further, although the reduced diameter portion 50 and the slow-reduced diameter structure 11a have been described separately, the structure is such that both are integrated or each has a slow-reduced diameter structure in which the outer diameter gradually changes to the lower end. You may.
- present invention can be modified in various ways as long as it does not deviate from the spirit of the present invention. And it is natural that the present invention extends to the modified one.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Non-Positive Displacement Air Blowers (AREA)
- Valves And Accessory Devices For Braking Systems (AREA)
- Compressors, Vaccum Pumps And Other Relevant Systems (AREA)
- Jet Pumps And Other Pumps (AREA)
Abstract
【課題】回転円筒体(回転体)の回転数を下げることなく応力を低減させることが可能で、かつ排気性能を向上させる真空ポンプ、および真空ポンプに備わる回転円筒体を提供する。 【解決手段】真空ポンプに備わる円筒部(回転円筒体)の排気口側下部において、ねじ溝排気要素の固定側部品よりも下流側に延伸した延伸部が設けられる。延伸部においては、回転時に内径側に発生する応力は外径が小さいほど小さくなるので、縮径部を有する構成により、回転体(円筒部など)の回転数を下げずとも、円筒部の内径側に発生する応力を低減させることができる。また、延伸部に緩縮径構造を採用することにより、縮径部における応力集中を低減することができる。
Description
本発明は、真空ポンプ、および真空ポンプに備わる回転円筒体に関する。
詳しくは、回転円筒体に加わる応力を低減する真空ポンプ、および真空ポンプに備わる回転円筒体に関する。
詳しくは、回転円筒体に加わる応力を低減する真空ポンプ、および真空ポンプに備わる回転円筒体に関する。
配設される真空室内の真空排気処理を行うための真空ポンプには、回転体とねじ溝排気要素(ねじ溝型排気機構/ねじ溝ポンプ部)を備えているものがある。当該ねじ溝排気要素を備えた真空ポンプは、回転体における回転翼が配設された下側に、回転翼のない回転円筒体(ロータ円筒部)を設け、ねじ溝排気要素内のガスを圧縮する構成になっている。
このようなロータ円筒部が設けられる真空ポンプを含め、一般的に真空ポンプでは、遠心力によりロータ円筒部の内径側に対して応力が生じ、その応力が設計基準値を超える虞があった。
図9は、従来のターボ分子ポンプ100を説明するための図である。
図9に示したように、従来のターボ分子ポンプ100には、ネジ付スペーサ131と隙間(クリアランス)を介して軸方向に対向して円筒部102dが配設される。この円筒部102dに応力が生じると、高温下での長期運動によって円筒部102dが徐々に変形・膨張するクリープ現象が生じる。
このクリープ現象によりネジ付スペーサ131と円筒部102dとのクリアランスの規定値量が小さくなるまでの期間であるクリープ寿命は、メンテナンスコストの観点から可能な限り長い方がよい。
このようなロータ円筒部が設けられる真空ポンプを含め、一般的に真空ポンプでは、遠心力によりロータ円筒部の内径側に対して応力が生じ、その応力が設計基準値を超える虞があった。
図9は、従来のターボ分子ポンプ100を説明するための図である。
図9に示したように、従来のターボ分子ポンプ100には、ネジ付スペーサ131と隙間(クリアランス)を介して軸方向に対向して円筒部102dが配設される。この円筒部102dに応力が生じると、高温下での長期運動によって円筒部102dが徐々に変形・膨張するクリープ現象が生じる。
このクリープ現象によりネジ付スペーサ131と円筒部102dとのクリアランスの規定値量が小さくなるまでの期間であるクリープ寿命は、メンテナンスコストの観点から可能な限り長い方がよい。
特許文献1には、高速で回転しても回転翼やそれを支持する箇所において局部的な応力や温度上昇を生じさせないことを目的として、回転翼の外径を排気口側と吸気口側とで異ならせる技術について記載されている。
また、上述した特許文献1のような構成の他に、回転体(回転翼/回転円筒体)の回転数を下げることで応力を低減するようにしていた。
しかしながら、回転体の回転数を下げれば排気性能は低下してしまっていた。
しかしながら、回転体の回転数を下げれば排気性能は低下してしまっていた。
本発明は、回転円筒体(回転体)の回転数を下げることなく応力を低減させることが可能で、かつ排気性能を向上させる真空ポンプ、および真空ポンプに備わる回転円筒体を提供することを目的とする。
請求項1記載の本願発明では、吸気口と排気口が形成された外装体と、前記外装体に固定され、ねじ溝を有するねじ溝型排気機構と、前記外装体に内包され、回転自在に支持された回転軸と、前記回転軸に配設され、前記ねじ溝型排気機構と隙間を介して対向する対向部および前記ねじ溝型排気機構よりも下流側に延伸した延伸部を有し、当該延伸部において前記対向部の外径よりも小さい外径を有する縮径部と、応力集中を低減する緩縮径構造を備える回転円筒体と、を具備することを特徴とする真空ポンプを提供する。
請求項2記載の本願発明では、前記緩縮径構造は、テーパー構造であることを特徴とする請求項1に記載の真空ポンプを提供する。
請求項3記載の本願発明では、前記緩縮径構造は、曲面形状であることを特徴とする請求項1に記載の真空ポンプを提供する。
請求項4記載の本願発明では、前記緩縮径構造は、前記縮径部に含まれることを特徴とする請求項1から請求項3のいずれか1項に記載の真空ポンプを提供する。
請求項5記載の本願発明では、吸気口と排気口が形成された外装体と、前記外装体に固定され、ねじ溝を有するねじ溝型排気機構と、前記外装体に内包され、回転自在に支持された回転軸とを備えた真空ポンプの回転円筒体であって、前記回転軸に配設され、前記ねじ溝型排気機構と隙間を介して対向する対向部および前記ねじ溝型排気機構よりも下流側に延伸した延伸部を有し、当該延伸部において前記対向部の外径よりも小さい外径を有する縮径部と、応力集中を低減する緩縮径構造を備えることを特徴とする回転円筒体を提供する。
請求項2記載の本願発明では、前記緩縮径構造は、テーパー構造であることを特徴とする請求項1に記載の真空ポンプを提供する。
請求項3記載の本願発明では、前記緩縮径構造は、曲面形状であることを特徴とする請求項1に記載の真空ポンプを提供する。
請求項4記載の本願発明では、前記緩縮径構造は、前記縮径部に含まれることを特徴とする請求項1から請求項3のいずれか1項に記載の真空ポンプを提供する。
請求項5記載の本願発明では、吸気口と排気口が形成された外装体と、前記外装体に固定され、ねじ溝を有するねじ溝型排気機構と、前記外装体に内包され、回転自在に支持された回転軸とを備えた真空ポンプの回転円筒体であって、前記回転軸に配設され、前記ねじ溝型排気機構と隙間を介して対向する対向部および前記ねじ溝型排気機構よりも下流側に延伸した延伸部を有し、当該延伸部において前記対向部の外径よりも小さい外径を有する縮径部と、応力集中を低減する緩縮径構造を備えることを特徴とする回転円筒体を提供する。
本発明によれば、回転円筒体におけるクリープ寿命に起因する部分の応力を、回転数を下げずに低減することができるので、回転数を下げる設計にして応力を低減させる構成に比べて、排気性能を維持または向上させることができる。
(i)実施形態の概要
本発明の実施形態に係るターボ分子ポンプ(真空ポンプ)では、ターボ分子ポンプに備わる円筒部(回転円筒体)の排気口側下部において、ねじ溝排気要素の固定側部品よりも下流側に延伸した、延伸部が設けられる。そして、延伸部には縮径部が設けられる。
より詳しくは、円筒部の下端部(排気口側端部)をねじ溝排気要素より長く設計して延伸部を設ける。そして、そのロータ円筒部の延伸部に、ロータ円筒部の吸気口側であり且つねじ溝排気要素と対向する部分(対向部)よりも外径の大きさが小さい縮径部を設ける。さらに、延伸部に、緩縮径構造が採用されている。この緩縮径構造とは、緩やかに縮径している構造を意味する。
本発明の実施形態に係るターボ分子ポンプ(真空ポンプ)では、ターボ分子ポンプに備わる円筒部(回転円筒体)の排気口側下部において、ねじ溝排気要素の固定側部品よりも下流側に延伸した、延伸部が設けられる。そして、延伸部には縮径部が設けられる。
より詳しくは、円筒部の下端部(排気口側端部)をねじ溝排気要素より長く設計して延伸部を設ける。そして、そのロータ円筒部の延伸部に、ロータ円筒部の吸気口側であり且つねじ溝排気要素と対向する部分(対向部)よりも外径の大きさが小さい縮径部を設ける。さらに、延伸部に、緩縮径構造が採用されている。この緩縮径構造とは、緩やかに縮径している構造を意味する。
延伸部においては、回転時に内径側に発生する応力は外径が小さいほど小さくなるので、上述した縮径部及び緩縮径構造を有する構成により、回転体(円筒部など)の回転数を下げずとも、円筒部の内径側に発生する応力を低減させることができる。
(ii)実施形態の詳細
以下、本発明の好適な実施形態について、図1から図8を参照して詳細に説明する。
このターボ分子ポンプ100の縦断面図を図1に示す。図1において、ターボ分子ポンプ100は、円筒状の外筒127の上端に吸気口101が形成されている。そして、外筒127の内方には、ガスを吸引排気するためのタービンブレードである複数の回転翼102(102a、102b、102c・・・)を周部に放射状かつ多段に形成した回転体103が備えられている。この回転体103の中心にはロータ軸113が取り付けられており、このロータ軸113は、例えば5軸制御の磁気軸受により空中に浮上支持かつ位置制御されている。
以下、本発明の好適な実施形態について、図1から図8を参照して詳細に説明する。
このターボ分子ポンプ100の縦断面図を図1に示す。図1において、ターボ分子ポンプ100は、円筒状の外筒127の上端に吸気口101が形成されている。そして、外筒127の内方には、ガスを吸引排気するためのタービンブレードである複数の回転翼102(102a、102b、102c・・・)を周部に放射状かつ多段に形成した回転体103が備えられている。この回転体103の中心にはロータ軸113が取り付けられており、このロータ軸113は、例えば5軸制御の磁気軸受により空中に浮上支持かつ位置制御されている。
上側径方向電磁石104は、4個の電磁石がX軸とY軸とに対をなして配置されている。この上側径方向電磁石104の近接に、かつ上側径方向電磁石104のそれぞれに対応されて4個の上側径方向センサ107が備えられている。上側径方向センサ107は、例えば伝導巻線を有するインダクタンスセンサや渦電流センサなどが用いられ、ロータ軸113の位置に応じて変化するこの伝導巻線のインダクタンスの変化に基づいてロータ軸113の位置を検出する。この上側径方向センサ107はロータ軸113、すなわちそれに固定された回転体103の径方向変位を検出し、制御装置200に送るように構成されている。
この制御装置200においては、例えばPID調節機能を有する補償回路が、上側径方向センサ107によって検出された位置信号に基づいて、上側径方向電磁石104の励磁制御指令信号を生成し、図2に示すアンプ回路150(後述する)が、この励磁制御指令信号に基づいて、上側径方向電磁石104を励磁制御することで、ロータ軸113の上側の径方向位置が調整される。
そして、このロータ軸113は、高透磁率材(鉄、ステンレスなど)などにより形成され、上側径方向電磁石104の磁力により吸引されるようになっている。かかる調整は、X軸方向とY軸方向とにそれぞれ独立して行われる。また、下側径方向電磁石105及び下側径方向センサ108が、上側径方向電磁石104及び上側径方向センサ107と同様に配置され、ロータ軸113の下側の径方向位置を上側の径方向位置と同様に調整している。
さらに、軸方向電磁石106A、106Bが、ロータ軸113の下部に備えた円板状の金属ディスク111を上下に挟んで配置されている。金属ディスク111は、鉄などの高透磁率材で構成されている。ロータ軸113の軸方向変位を検出するために軸方向センサ109が備えられ、その軸方向位置信号が制御装置200に送られるように構成されている。
そして、制御装置200において、例えばPID調節機能を有する補償回路が、軸方向センサ109によって検出された軸方向位置信号に基づいて、軸方向電磁石106Aと軸方向電磁石106Bのそれぞれの励磁制御指令信号を生成し、アンプ回路150が、これらの励磁制御指令信号に基づいて、軸方向電磁石106Aと軸方向電磁石106Bをそれぞれ励磁制御することで、軸方向電磁石106Aが磁力により金属ディスク111を上方に吸引し、軸方向電磁石106Bが金属ディスク111を下方に吸引し、ロータ軸113の軸方向位置が調整される。
このように、制御装置200は、この軸方向電磁石106A、106Bが金属ディスク111に及ぼす磁力を適当に調節し、ロータ軸113を軸方向に磁気浮上させ、空間に非接触で保持するようになっている。なお、これら上側径方向電磁石104、下側径方向電磁石105及び軸方向電磁石106A、106Bを励磁制御するアンプ回路150については、後述する。
一方、モータ121は、ロータ軸113を取り囲むように周状に配置された複数の磁極を備えている。各磁極は、ロータ軸113との間に作用する電磁力を介してロータ軸113を回転駆動するように、制御装置200によって制御されている。また、モータ121には図示しない例えばホール素子、レゾルバ、エンコーダなどの回転速度センサが組み込まれており、この回転速度センサの検出信号によりロータ軸113の回転速度が検出されるようになっている。
さらに、例えば下側径方向センサ108近傍に、図示しない位相センサが取り付けてあり、ロータ軸113の回転の位相を検出するようになっている。制御装置200では、この位相センサと回転速度センサの検出信号を共に用いて磁極の位置を検出するようになっている。
回転翼102(102a、102b、102c・・・)とわずかの空隙を隔てて複数枚の固定翼123(123a、123b、123c・・・)が配設されている。回転翼102(102a、102b、102c・・・)は、それぞれ排気ガスの分子を衝突により下方向に移送するため、ロータ軸113の軸線に垂直な平面から所定の角度だけ傾斜して形成されている。
また、固定翼123も、同様にロータ軸113の軸線に垂直な平面から所定の角度だけ傾斜して形成され、かつ外筒127の内方に向けて回転翼102の段と互い違いに配設されている。そして、固定翼123の外周端は、複数の段積みされた固定翼スペーサ125(125a、125b、125c・・・)の間に嵌挿された状態で支持されている。
固定翼スペーサ125はリング状の部材であり、例えばアルミニウム、鉄、ステンレス、銅などの金属、又はこれらの金属を成分として含む合金などの金属によって構成されている。固定翼スペーサ125の外周には、わずかの空隙を隔てて外筒127が固定されている。外筒127の底部にはベース部129が配設されている。ベース部129には排気口133が形成され、外部に連通されている。チャンバ側から吸気口101に入ってベース部129に移送されてきた排気ガスは、排気口133へと送られる。
さらに、ターボ分子ポンプ100の用途によって、固定翼スペーサ125の下部とベース部129の間には、ネジ付スペーサ131が配設される。ネジ付スペーサ131は、アルミニウム、銅、ステンレス、鉄、又はこれらの金属を成分とする合金などの金属によって構成された円筒状の部材であり、その内周面に螺旋状のネジ溝131aが複数条刻設されている。ネジ溝131aの螺旋の方向は、回転体103の回転方向に排気ガスの分子が移動したときに、この分子が排気口133の方へ移送される方向である。回転体103の回転翼102(102a、102b、102c・・・)に続く最下部には円筒部102dが垂下されている。この円筒部102dの外周面は、円筒状で、かつネジ付スペーサ131の内周面に向かって張り出されており、このネジ付スペーサ131の内周面と所定の隙間を隔てて近接されている。回転翼102および固定翼123によってネジ溝131aに移送されてきた排気ガスは、ネジ溝131aに案内されつつベース部129へと送られる。
ベース部129は、ターボ分子ポンプ100の基底部を構成する円盤状の部材であり、一般には鉄、アルミニウム、ステンレスなどの金属によって構成されている。ベース部129はターボ分子ポンプ100を物理的に保持すると共に、熱の伝導路の機能も兼ね備えているので、鉄、アルミニウムや銅などの剛性があり、熱伝導率も高い金属が使用されるのが望ましい。
かかる構成において、回転翼102がロータ軸113と共にモータ121により回転駆動されると、回転翼102と固定翼123の作用により、吸気口101を通じてチャンバから排気ガスが吸気される。吸気口101から吸気された排気ガスは、回転翼102と固定翼123の間を通り、ベース部129へ移送される。このとき、排気ガスが回転翼102に接触する際に生ずる摩擦熱や、モータ121で発生した熱の伝導などにより、回転翼102の温度は上昇するが、この熱は、輻射又は排気ガスの気体分子などによる伝導により固定翼123側に伝達される。
固定翼スペーサ125は、外周部で互いに接合しており、固定翼123が回転翼102から受け取った熱や排気ガスが固定翼123に接触する際に生ずる摩擦熱などを外部へと伝達する。
なお、上記では、ネジ付スペーサ131は回転体103の円筒部102dの外周に配設し、ネジ付スペーサ131の内周面にネジ溝131aが刻設されているとして説明した。しかしながら、これとは逆に円筒部102dの外周面にネジ溝が刻設され、その周囲に円筒状の内周面を有するスペーサが配置される場合もある。
また、ターボ分子ポンプ100の用途によっては、吸気口101から吸引されたガスが上側径方向電磁石104、上側径方向センサ107、モータ121、下側径方向電磁石105、下側径方向センサ108、軸方向電磁石106A、106B、軸方向センサ109などで構成される電装部に侵入することのないよう、電装部は周囲をステータコラム122で覆われ、このステータコラム122内はパージガスにて所定圧に保たれる場合もある。
この場合には、ベース部129には図示しない配管が配設され、この配管を通じてパージガスが導入される。導入されたパージガスは、保護ベアリング120とロータ軸113間、モータ121のロータとステータ間、ステータコラム122と回転翼102の内周側円筒部の間の隙間を通じて排気口133へ送出される。
ここに、ターボ分子ポンプ100は、機種の特定と、個々に調整された固有のパラメータ(例えば、機種に対応する諸特性)に基づいた制御を要する。この制御パラメータを格納するために、上記ターボ分子ポンプ100は、その本体内に電子回路部141を備えている。電子回路部141は、EEP-ROM等の半導体メモリ及びそのアクセスのための半導体素子等の電子部品、それらの実装用の基板143等から構成される。この電子回路部141は、ターボ分子ポンプ100の下部を構成するベース部129の例えば中央付近の図示しない回転速度センサの下部に収容され、気密性の底蓋145によって閉じられている。
ところで、半導体の製造工程では、チャンバに導入されるプロセスガスの中には、その圧力が所定値よりも高くなり、或いは、その温度が所定値よりも低くなると、固体となる性質を有するものがある。ターボ分子ポンプ100内部では、排気ガスの圧力は、吸気口101で最も低く排気口133で最も高い。プロセスガスが吸気口101から排気口133へ移送される途中で、その圧力が所定値よりも高くなったり、その温度が所定値よりも低くなったりすると、プロセスガスは、固体状となり、ターボ分子ポンプ100内部に付着して堆積する。
例えば、Alエッチング装置にプロセスガスとしてSiCl4が使用された場合、低真空(760[torr]~10-2[torr])かつ、低温(約20[℃])のとき、固体生成物(例えばAlCl3)が析出し、ターボ分子ポンプ100内部に付着堆積することが蒸気圧曲線からわかる。これにより、ターボ分子ポンプ100内部にプロセスガスの析出物が堆積すると、この堆積物がポンプ流路を狭め、ターボ分子ポンプ100の性能を低下させる原因となる。そして、前述した生成物は、排気口133付近やネジ付スペーサ131付近の圧力が高い部分で凝固、付着し易い状況にあった。
そのため、この問題を解決するために、従来はベース部129等の外周に図示しないヒータや環状の水冷管149を巻着させ、かつ例えばベース部129に図示しない温度センサ(例えばサーミスタ)を埋め込み、この温度センサの信号に基づいてベース部129の温度を一定の高い温度(設定温度)に保つようにヒータの加熱や水冷管149による冷却の制御(以下TMSという。TMS;Temperature Management System)が行われている。
次に、このように構成されるターボ分子ポンプ100に関して、その上側径方向電磁石104、下側径方向電磁石105及び軸方向電磁石106A、106Bを励磁制御するアンプ回路150について説明する。このアンプ回路150の回路図を図2に示す。
図2において、上側径方向電磁石104等を構成する電磁石巻線151は、その一端がトランジスタ161を介して電源171の正極171aに接続されており、また、その他端が電流検出回路181及びトランジスタ162を介して電源171の負極171bに接続されている。そして、トランジスタ161、162は、いわゆるパワーMOSFETとなっており、そのソース-ドレイン間にダイオードが接続された構造を有している。
このとき、トランジスタ161は、そのダイオードのカソード端子161aが正極171aに接続されるとともに、アノード端子161bが電磁石巻線151の一端と接続されるようになっている。また、トランジスタ162は、そのダイオードのカソード端子162aが電流検出回路181に接続されるとともに、アノード端子162bが負極171bと接続されるようになっている。
一方、電流回生用のダイオード165は、そのカソード端子165aが電磁石巻線151の一端に接続されるとともに、そのアノード端子165bが負極171bに接続されるようになっている。また、これと同様に、電流回生用のダイオード166は、そのカソード端子166aが正極171aに接続されるとともに、そのアノード端子166bが電流検出回路181を介して電磁石巻線151の他端に接続されるようになっている。そして、電流検出回路181は、例えばホールセンサ式電流センサや電気抵抗素子で構成されている。
以上のように構成されるアンプ回路150は、一つの電磁石に対応されるものである。そのため、磁気軸受が5軸制御で、電磁石104、105、106A、106Bが合計10個ある場合には、電磁石のそれぞれについて同様のアンプ回路150が構成され、電源171に対して10個のアンプ回路150が並列に接続されるようになっている。
さらに、アンプ制御回路191は、例えば、制御装置200の図示しないディジタル・シグナル・プロセッサ部(以下、DSP部という)によって構成され、このアンプ制御回路191は、トランジスタ161、162のon/offを切り替えるようになっている。
アンプ制御回路191は、電流検出回路181が検出した電流値(この電流値を反映した信号を電流検出信号191cという)と所定の電流指令値とを比較するようになっている。そして、この比較結果に基づき、PWM制御による1周期である制御サイクルTs内に発生させるパルス幅の大きさ(パルス幅時間Tp1、Tp2)を決めるようになっている。その結果、このパルス幅を有するゲート駆動信号191a、191bを、アンプ制御回路191からトランジスタ161、162のゲート端子に出力するようになっている。
なお、回転体103の回転速度の加速運転中に共振点を通過する際や定速運転中に外乱が発生した際等に、高速かつ強い力での回転体103の位置制御をする必要がある。そのため、電磁石巻線151に流れる電流の急激な増加(或いは減少)ができるように、電源171としては、例えば50V程度の高電圧が使用されるようになっている。また、電源171の正極171aと負極171bとの間には、電源171の安定化のために、通常コンデンサが接続されている(図示略)。
かかる構成において、トランジスタ161、162の両方をonにすると、電磁石巻線151に流れる電流(以下、電磁石電流iLという)が増加し、両方をoffにすると、電磁石電流iLが減少する。
また、トランジスタ161、162の一方をonにし他方をoffにすると、いわゆるフライホイール電流が保持される。そして、このようにアンプ回路150にフライホイール電流を流すことで、アンプ回路150におけるヒステリシス損を減少させ、回路全体としての消費電力を低く抑えることができる。また、このようにトランジスタ161、162を制御することにより、ターボ分子ポンプ100に生じる高調波等の高周波ノイズを低減することができる。さらに、このフライホイール電流を電流検出回路181で測定することで電磁石巻線151を流れる電磁石電流iLが検出可能となる。
すなわち、検出した電流値が電流指令値より小さい場合には、図3に示すように制御サイクルTs(例えば100μs)中で1回だけ、パルス幅時間Tp1に相当する時間分だけトランジスタ161、162の両方をonにする。そのため、この期間中の電磁石電流iLは、正極171aから負極171bへ、トランジスタ161、162を介して流し得る電流値iLmax(図示せず)に向かって増加する。
一方、検出した電流値が電流指令値より大きい場合には、図4に示すように制御サイクルTs中で1回だけパルス幅時間Tp2に相当する時間分だけトランジスタ161、162の両方をoffにする。そのため、この期間中の電磁石電流iLは、負極171bから正極171aへ、ダイオード165、166を介して回生し得る電流値iLmin(図示せず)に向かって減少する。
そして、いずれの場合にも、パルス幅時間Tp1、Tp2の経過後は、トランジスタ161、162のどちらか1個をonにする。そのため、この期間中は、アンプ回路150にフライホイール電流が保持される。
図5は、第1の実施形態に係るターボ分子ポンプ100の概略を説明するための図である。
図6は、図5に示したターボ分子ポンプ100の円筒部102dにおける対向部10t、延伸部11(緩縮径構造11a及び縮径部50)を説明するための図である。
図7は、円筒部102dにおける対向部10t、延伸部11、緩縮径構造11a及び縮径部50の拡大図である。
図5から図7に示したように、円筒部102dは、ネジ付スペーサ131と所定の隙間を隔てて軸線方向に対向する対向部10t、ネジ付スペーサ131よりも排気口133側に延伸した延伸部11、緩縮径構造11aならびに縮径部50を有する。そして、縮径部50の形状は、円筒部102dと同様に円筒形である。
この図6から明らかなように、延伸部11は、緩縮径構造11aと縮径部50とから構成されている。
図6は、図5に示したターボ分子ポンプ100の円筒部102dにおける対向部10t、延伸部11(緩縮径構造11a及び縮径部50)を説明するための図である。
図7は、円筒部102dにおける対向部10t、延伸部11、緩縮径構造11a及び縮径部50の拡大図である。
図5から図7に示したように、円筒部102dは、ネジ付スペーサ131と所定の隙間を隔てて軸線方向に対向する対向部10t、ネジ付スペーサ131よりも排気口133側に延伸した延伸部11、緩縮径構造11aならびに縮径部50を有する。そして、縮径部50の形状は、円筒部102dと同様に円筒形である。
この図6から明らかなように、延伸部11は、緩縮径構造11aと縮径部50とから構成されている。
また、本実施形態では、円筒部102dにおける対向部10tの内径をr、外径をRtとして説明する。
そして、図7で示したように、緩縮径構造11aの下端部(排気口133側)および縮径部50の外径をRs、緩縮径構造11aの漸化外径をmとして説明する。なお、本実施形態では、「少しずつ変化する外径」という意味で「漸化外径」を用いる。
本実施形態に係るターボ分子ポンプ100に備わる円筒部102dは、ネジ付スペーサ131よりも排気口133側に延伸した延伸部11において、延伸部11ではない部分の円筒部102d(対向部10t)の外径Rtよりも小さい漸化外径mを有する緩縮径構造11aが形成される。この漸化外径mは、図5から図7で示す実施形態では、吸気口側から排気口側にかけて値が徐々に小さくなっている(すなわち、外径が少しずつ変化している)。
そして、図7で示したように、緩縮径構造11aの下端部(排気口133側)および縮径部50の外径をRs、緩縮径構造11aの漸化外径をmとして説明する。なお、本実施形態では、「少しずつ変化する外径」という意味で「漸化外径」を用いる。
本実施形態に係るターボ分子ポンプ100に備わる円筒部102dは、ネジ付スペーサ131よりも排気口133側に延伸した延伸部11において、延伸部11ではない部分の円筒部102d(対向部10t)の外径Rtよりも小さい漸化外径mを有する緩縮径構造11aが形成される。この漸化外径mは、図5から図7で示す実施形態では、吸気口側から排気口側にかけて値が徐々に小さくなっている(すなわち、外径が少しずつ変化している)。
言い換えると、本実施形態に係る円筒部102dは、延伸部11の外径側において、所定の角度θの勾配を有する部分(緩縮径構造11a)を有する。この勾配は、例えば、延伸部11の外径側にテーパー形状を施すなどして構成することができる。
また、本実施形態では、延伸部11の起点(始点)と緩縮径構造11aの起点が一致する構成にしたが、これに限ることはない。つまり、対向部10tよりも延伸させた延伸部11の吸気口101側の一部を対向部10tと同じ大きさの外径Rtとし、続けて、縮径していく漸化外径mを有する緩縮径構造11aを設ける構成にしてもよい。すなわち、緩縮径構造11aは、延伸部11の少なくとも一部に形成される構成にすればよい。
また、本実施形態では、延伸部11の下端部(排気口133側)の外径Rsと、緩縮径構造11aの最下端部(排気口133側)における漸化外径mの値が一致する構成にしたが、これに限られることはない。つまり、緩縮径構造11aの最下端部における漸化外径mの値と対向部10tの内径rの値とが一致する構成にしてもよい。
上記延伸部11により、円筒部102dの下端に発生する応力が低減する働きがあるが、応力低減の観点から、この縮径部50と緩縮径構造11aを設けることで、より応力低減の効果がある。
よって、寸法上の制約の範囲内で、縮径部50と緩縮径構造11aによる延伸部11を設けている。
よって、寸法上の制約の範囲内で、縮径部50と緩縮径構造11aによる延伸部11を設けている。
図8は、この縮径部50の緩縮径構造11aとの接続形態を示した図である。
緩縮径構造11aと縮径部50との接続箇所は、応力が集中し易いので、ここを応力集中が発生しにくい構造とすることが好ましい。
図8(a)では、緩縮径構造11aにテーパー構造Xを採用している。また。図8(b)では、緩縮径構造11aに隅R形状Yを採用している。
図8(a)、(b)に示した以外の構造でも、応力集中を軽減できる構造であれば、本実施形態に用いることができる。
緩縮径構造11aと縮径部50との接続箇所は、応力が集中し易いので、ここを応力集中が発生しにくい構造とすることが好ましい。
図8(a)では、緩縮径構造11aにテーパー構造Xを採用している。また。図8(b)では、緩縮径構造11aに隅R形状Yを採用している。
図8(a)、(b)に示した以外の構造でも、応力集中を軽減できる構造であれば、本実施形態に用いることができる。
なお、本実施形態では、緩縮径構造11aの勾配を断面において直線状で形成する構成としたが、これに限られることはない。例えば、図示しないが、緩縮径構造11aの勾配を断面において曲線状で形成する構成にしてもよい。
上述した構成により、本実施形態では、円筒部102dを含む回転体の回転数を下げずに、円筒部102dにおけるクリープ寿命に起因する部分である緩縮径構造11aの内径側にかかる応力を低減することができる。
また、回転数を下げずともクリープ現象を防止することができるので、回転数を下げることによるターボ分子ポンプ100の排気性能の低下を防止することができる。
或いは、この構成により円筒部102dを含むロータ部の回転数を上げることができ得るので、ターボ分子ポンプ100の排気性能を向上させることができる。
縮径部50は、縮径部50の外径をRsで一定として説明しているが、それに限らず、さらに下端に向かって縮径していく構造であってもよい。
また、縮径部50と緩縮径構造11aを分けて説明したが、両者が一体となった構造、あるいは、それぞれが下端まで緩やかな外径変化をする緩縮径構造となった構造であってもよい。
また、回転数を下げずともクリープ現象を防止することができるので、回転数を下げることによるターボ分子ポンプ100の排気性能の低下を防止することができる。
或いは、この構成により円筒部102dを含むロータ部の回転数を上げることができ得るので、ターボ分子ポンプ100の排気性能を向上させることができる。
縮径部50は、縮径部50の外径をRsで一定として説明しているが、それに限らず、さらに下端に向かって縮径していく構造であってもよい。
また、縮径部50と緩縮径構造11aを分けて説明したが、両者が一体となった構造、あるいは、それぞれが下端まで緩やかな外径変化をする緩縮径構造となった構造であってもよい。
なお、本発明の実施形態および各変形例は、必要に応じて各々を組み合わせる構成にしてもよい。
また、本発明は、本発明の精神を逸脱しない限り種々の改変をなすことができる。そして、本発明が当該改変されたものに及ぶことは当然である。
10t 対向部
11 延伸部
11a 緩縮径構造
50 縮径部
100 ターボ分子ポンプ
101 吸気口
102 回転翼
102d 円筒部
103 回転体
113 ロータ軸
123 固定翼
125 固定翼スペーサ
127 外筒
129 ベース部
131 ネジ付スペーサ
131a ネジ溝
133 排気口
200 制御装置
11 延伸部
11a 緩縮径構造
50 縮径部
100 ターボ分子ポンプ
101 吸気口
102 回転翼
102d 円筒部
103 回転体
113 ロータ軸
123 固定翼
125 固定翼スペーサ
127 外筒
129 ベース部
131 ネジ付スペーサ
131a ネジ溝
133 排気口
200 制御装置
Claims (5)
- 吸気口と排気口が形成された外装体と、
前記外装体に固定され、ねじ溝を有するねじ溝型排気機構と、
前記外装体に内包され、回転自在に支持された回転軸と、
前記回転軸に配設され、前記ねじ溝型排気機構と隙間を介して対向する対向部および前記ねじ溝型排気機構よりも下流側に延伸した延伸部を有し、当該延伸部において前記対向部の外径よりも小さい外径を有する縮径部と、応力集中を低減する緩縮径構造を備える回転円筒体と、
を具備することを特徴とする真空ポンプ。
- 前記緩縮径構造は、テーパー構造であることを特徴とする請求項1に記載の真空ポンプ。
- 前記緩縮径構造は、曲面形状であることを特徴とする請求項1に記載の真空ポンプ。
- 前記緩縮径構造は、前記縮径部に含まれることを特徴とする請求項1から請求項3のいずれか1項に記載の真空ポンプ。
- 吸気口と排気口が形成された外装体と、
前記外装体に固定され、ねじ溝を有するねじ溝型排気機構と、
前記外装体に内包され、回転自在に支持された回転軸とを備えた真空ポンプの回転円筒体であって、
前記回転軸に配設され、前記ねじ溝型排気機構と隙間を介して対向する対向部および前記ねじ溝型排気機構よりも下流側に延伸した延伸部を有し、当該延伸部において前記対向部の外径よりも小さい外径を有する縮径部と、応力集中を低減する緩縮径構造を備えることを特徴とする回転円筒体。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| IL301243A IL301243A (en) | 2020-10-09 | 2021-10-01 | Vacuum pump and rotating cylinder supplied with vacuum |
| CN202180062168.3A CN116097003A (zh) | 2020-10-09 | 2021-10-01 | 真空泵及真空泵具备的旋转圆筒体 |
| KR1020237008319A KR20230082608A (ko) | 2020-10-09 | 2021-10-01 | 진공 펌프, 및 진공 펌프에 구비되는 회전 원통체 |
| EP21877527.8A EP4227536A4 (en) | 2020-10-09 | 2021-10-01 | VACUUM PUMP AND CYLINDRICAL ROTATING BODY FOR THE VACUUM PUMP |
| US18/044,815 US20240026888A1 (en) | 2020-10-09 | 2021-10-01 | Vacuum pump and rotating cylinder provided in vacuum pump |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020-171094 | 2020-10-09 | ||
| JP2020171094A JP2022062902A (ja) | 2020-10-09 | 2020-10-09 | 真空ポンプ、および真空ポンプに備わる回転円筒体 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2022075228A1 true WO2022075228A1 (ja) | 2022-04-14 |
Family
ID=81126873
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2021/036488 WO2022075228A1 (ja) | 2020-10-09 | 2021-10-01 | 真空ポンプ、および真空ポンプに備わる回転円筒体 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US20240026888A1 (ja) |
| EP (1) | EP4227536A4 (ja) |
| JP (1) | JP2022062902A (ja) |
| KR (1) | KR20230082608A (ja) |
| CN (1) | CN116097003A (ja) |
| IL (1) | IL301243A (ja) |
| WO (1) | WO2022075228A1 (ja) |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH01113191U (ja) * | 1988-01-26 | 1989-07-31 | ||
| JPH10246197A (ja) | 1997-03-05 | 1998-09-14 | Ebara Corp | ターボ分子ポンプ |
| WO2012077411A1 (ja) * | 2010-12-10 | 2012-06-14 | エドワーズ株式会社 | 真空ポンプ |
| JP2018035718A (ja) * | 2016-08-30 | 2018-03-08 | エドワーズ株式会社 | 真空ポンプ、および真空ポンプに備わる回転円筒体 |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| NL184487C (nl) * | 1977-02-25 | 1989-08-01 | Ultra Centrifuge Nederland Nv | Moleculaire pomp. |
| JP3518343B2 (ja) * | 1998-06-19 | 2004-04-12 | 株式会社島津製作所 | ターボ形真空排気装置 |
-
2020
- 2020-10-09 JP JP2020171094A patent/JP2022062902A/ja active Pending
-
2021
- 2021-10-01 WO PCT/JP2021/036488 patent/WO2022075228A1/ja active Application Filing
- 2021-10-01 US US18/044,815 patent/US20240026888A1/en active Pending
- 2021-10-01 KR KR1020237008319A patent/KR20230082608A/ko active Search and Examination
- 2021-10-01 IL IL301243A patent/IL301243A/en unknown
- 2021-10-01 EP EP21877527.8A patent/EP4227536A4/en active Pending
- 2021-10-01 CN CN202180062168.3A patent/CN116097003A/zh active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH01113191U (ja) * | 1988-01-26 | 1989-07-31 | ||
| JPH10246197A (ja) | 1997-03-05 | 1998-09-14 | Ebara Corp | ターボ分子ポンプ |
| WO2012077411A1 (ja) * | 2010-12-10 | 2012-06-14 | エドワーズ株式会社 | 真空ポンプ |
| JP2018035718A (ja) * | 2016-08-30 | 2018-03-08 | エドワーズ株式会社 | 真空ポンプ、および真空ポンプに備わる回転円筒体 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR20230082608A (ko) | 2023-06-08 |
| EP4227536A1 (en) | 2023-08-16 |
| IL301243A (en) | 2023-05-01 |
| EP4227536A4 (en) | 2024-10-23 |
| JP2022062902A (ja) | 2022-04-21 |
| CN116097003A (zh) | 2023-05-09 |
| US20240026888A1 (en) | 2024-01-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20230169091A (ko) | 터보 분자 펌프 | |
| WO2022075228A1 (ja) | 真空ポンプ、および真空ポンプに備わる回転円筒体 | |
| WO2022210118A1 (ja) | 真空ポンプ | |
| WO2022131035A1 (ja) | 真空ポンプ | |
| WO2022038996A1 (ja) | 真空ポンプ、固定翼、およびスペーサ | |
| WO2022153981A1 (ja) | 真空ポンプとその回転体 | |
| WO2022124239A1 (ja) | 真空ポンプ、真空ポンプの固定部品、及び真空ポンプの支持部品 | |
| WO2022124240A1 (ja) | 真空ポンプ | |
| WO2022030374A1 (ja) | 真空ポンプおよび真空ポンプ用回転翼 | |
| WO2022075229A1 (ja) | 真空ポンプとこれを用いた真空排気システム | |
| WO2022255202A1 (ja) | 真空ポンプ、スペーサ及びケーシング | |
| JP7378447B2 (ja) | 真空ポンプおよび固定部品 | |
| WO2022163341A1 (ja) | 真空ポンプ及びスペーサ | |
| WO2023008302A1 (ja) | 真空ポンプ | |
| WO2022054717A1 (ja) | 真空ポンプ | |
| WO2021246337A1 (ja) | 真空ポンプおよび真空ポンプの回転体 | |
| WO2023171566A1 (ja) | 真空ポンプ | |
| JP2022094272A (ja) | 真空ポンプ | |
| JP2024129334A (ja) | 真空ポンプ | |
| KR20240019079A (ko) | 진공 펌프 | |
| IL311887A (en) | Vacuum pump, vacuum pump bearing protection structure and rotating body of vacuum pump |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 21877527 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 18044815 Country of ref document: US |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2021877527 Country of ref document: EP Effective date: 20230509 |