WO2022049631A1 - 術具 - Google Patents
術具 Download PDFInfo
- Publication number
- WO2022049631A1 WO2022049631A1 PCT/JP2020/033087 JP2020033087W WO2022049631A1 WO 2022049631 A1 WO2022049631 A1 WO 2022049631A1 JP 2020033087 W JP2020033087 W JP 2020033087W WO 2022049631 A1 WO2022049631 A1 WO 2022049631A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- slider
- conversion
- movement amount
- surgical tool
- treatment
- Prior art date
Links
Images





Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/71—Manipulators operated by drive cable mechanisms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/00234—Surgical instruments, devices or methods, e.g. tourniquets for minimally invasive surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/00234—Surgical instruments, devices or methods, e.g. tourniquets for minimally invasive surgery
- A61B2017/00292—Surgical instruments, devices or methods, e.g. tourniquets for minimally invasive surgery mounted on or guided by flexible, e.g. catheter-like, means
- A61B2017/00296—Surgical instruments, devices or methods, e.g. tourniquets for minimally invasive surgery mounted on or guided by flexible, e.g. catheter-like, means mounted on an endoscope
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/00234—Surgical instruments, devices or methods, e.g. tourniquets for minimally invasive surgery
- A61B2017/00292—Surgical instruments, devices or methods, e.g. tourniquets for minimally invasive surgery mounted on or guided by flexible, e.g. catheter-like, means
- A61B2017/003—Steerable
- A61B2017/00318—Steering mechanisms
- A61B2017/00323—Cables or rods
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B2034/301—Surgical robots for introducing or steering flexible instruments inserted into the body, e.g. catheters or endoscopes
Definitions
- This disclosure relates to surgical tools.
- the slider of the operation unit moves linearly, and the linear movement of the slider is transmitted to the treatment unit by a wire or the like, so that the treatment unit operates by the amount of movement that the slider is operated.
- One aspect of the present disclosure is to provide a technique for improving operability in a surgical tool provided with an operation unit having a slider that moves linearly.
- One aspect of the present disclosure is a surgical tool, which includes a slider, a conversion unit, and a transmission wire.
- the slider is arranged so as to be relatively movable in a linear direction with respect to a main body provided with at least a treatment unit for performing a medical procedure.
- the conversion unit moves by the conversion movement amount obtained by converting the movement amount of the slider to a predetermined magnification.
- the transmission wire transmits the conversion transfer amount to the treatment unit.
- the amount of movement of the slider that moves linearly is converted to a predetermined magnification in the conversion unit. Therefore, only the amount of conversion movement converted to a predetermined magnification in the conversion unit is transmitted to the treatment unit. Therefore, for example, by reducing the predetermined magnification, the conversion movement amount becomes smaller than the movement amount of the slider.
- the treatment unit operates according to the conversion movement amount, it becomes easy to perform detailed work. That is, the operability can be improved in a surgical tool provided with an operation unit having a slider that moves linearly.
- the conversion unit may include a conversion wire and a moving pulley.
- the conversion wire has a first end attached to the slider and a second end attached to the body.
- the conversion wire is arranged on the peripheral surface.
- the conversion movement amount obtained by converting the movement amount of the slider to a predetermined magnification is transmitted to the treatment unit by the conversion units provided on one side and the other side with respect to the movement direction of the slider. Can be done.
- the surgical tool 1 in the present embodiment is a medical device used for medical practice such as surgery.
- the surgical tool 1 includes a treatment unit 10 and a main body 20.
- the treatment unit 10 is a part of the surgical instrument 1 used for medical treatment.
- the treatment portion 10 is formed in an elongated shape, for example, and the elongated first end portion is connected to the main body 20.
- the treatment unit 10 has a movable unit 11 at least in part.
- the movable portion 11 is arranged at the tip portion of the treatment portion 10, that is, at the second end portion opposite to the first end portion where the treatment portion 10 and the main body 20 are connected.
- the position where the movable portion 11 is arranged is not limited to the end portion of the treatment portion 10 on the side opposite to the end portion connected to the main body 20, but is arranged at a position other than the end portion of the treatment portion 10. May be good.
- the movable portion 11 is configured such that the tip portion is branched into two and the opening / closing operation of the branch can be performed, and the tip portions of the tip portions are respectively orthogonal to each other in two directions. It is configured so that the orientation can be adjusted. That is, the movable portion 11 is a portion that can be displaced with respect to the treatment portion 10.
- the movable portion 11 may be a portion used as, for example, a forceps. That is, the movable portion 11 may be a portion used in the treatment portion 10 as a gripping portion capable of gripping a treatment target portion, a suture needle, or the like.
- the branch opening / closing operation of the movable portion 11 may be performed by transmitting a driving force to the branched structure. Further, in the operation of adjusting the direction of the tip portion, the joint portion 13 that rotates in the direction of adjusting the direction of the tip portion is arranged, and the joint portion 13 rotates to move the movable portion 11 in the tip direction direction. It may be formed in a structure whose orientation can be adjusted.
- the joint portion 13 of the movable portion 11 has a first rotation axis 13A along the left-right direction (x-axis direction described later), and a second rotation axis 13B along the vertical direction (z-axis direction described later). May have.
- the joint portion 13 can be rotationally displaced with the rotation shafts 13A and 13B as the central axes.
- the first rotation axis 13A is an axis portion orthogonal to the longitudinal direction of the treatment portion 10.
- the second rotation axis 13B is an axis portion orthogonal to the longitudinal direction of the treatment portion 10 and the first rotation axis 13A.
- Parts and the like necessary for the treatment unit 10 to operate are arranged on the main body 20.
- the vertical direction of the main body 20 is the z-axis direction
- the upward direction is also referred to as the z-axis positive direction
- the downward direction is also referred to as the z-axis negative direction.
- the long side direction of the rectangular shape of the opening of the main body 20, that is, the longitudinal direction of the treatment portion 10 connected to the main body 20 is the y-axis direction
- the direction in which the treatment portion 10 is located when viewed from the main body 20 is the y-axis positive direction.
- the opposite direction is also referred to as the y-axis negative direction.
- the axis orthogonal to the yz plane is defined as the x-axis
- the positive direction of the z-axis is the upward direction
- the left side when facing the positive y-axis direction is the positive direction of the x-axis
- the right side is the negative direction of the x-axis.
- the x-axis direction is also referred to as the left-right direction
- the z-axis direction is also referred to as the up-down direction.
- the surface of the main body 20 viewed from the positive side of the z-axis in the negative direction of the z-axis is referred to as the front surface, and the surface of the main body 20 viewed from the negative side of the z-axis in the positive direction of the z-axis is also referred to as the back surface.
- the main body 20 has an opening 22 which is a plurality of rectangular through holes on the back surface.
- the number of rectangular openings is formed by the number of sliders 21.
- the number of sliders 21 included in the main body 20 in the present embodiment is three.
- the number of openings 22 is also three.
- the number of sliders 21 and the number of openings are not limited to three, and may be more or less than three, respectively.
- the opening 22 is arranged so that the long side direction of the rectangular shape is oriented along the longitudinal direction of the long treatment portion 10.
- the plurality of sliders 21 are arranged inside the plurality of openings 22 of the main body 20, and are arranged so as to be movable in the longitudinal direction of the openings 22. Each of the plurality of sliders 21 reciprocates to generate a driving force that displaces the movable portion 11.
- end portion of the conversion wire 27 is fixed to each end portion of the plurality of sliders 21 in the y-axis direction.
- a plurality of moving pulleys 23 are arranged once for each conversion wire 27.
- the moving pulley 23 is arranged so that one conversion wire 27 is attached to the peripheral surface thereof.
- One slider 21 is arranged so as to be located between the two moving pulleys 23. Further, the moving pulley 23 is arranged so that the rotation axis extends in the vertical direction, in other words, in the z-axis direction.
- the first end of the transmission wire 25 is attached to the rotation shaft of the moving pulley 23 on the side closer to the treatment portion 10. Further, the second end portion, which is an end portion different from the first end portion of the transmission wire 25, is attached to the rotation shaft of the moving pulley 23 on the side opposite to the treatment portion 10.
- the transmission wire 25 extends from the moving pulley 23 on the side closer to the treatment portion 10 toward the treatment portion 10 and the movable portion 11.
- the transmission wire 25 is folded back at the treatment portion 10 and the movable portion 11.
- the transmission wire 25 folded back in the treatment portion 10 and the movable portion 11 is folded back along the fixed pulley 24 fixed to the main body 20.
- the plurality of transmission wires 25 are directly or indirectly connected to the sandwiched portion 11A and the sandwiched portion 11B branched into two and the joint portion 13.
- the plurality of transmission wires 25 are not limited to those that are directly or indirectly connected to the sandwiched portion 11A and the sandwiched portion 11B and the joint portion 13 that are branched into two, and operate on the movable portion 11. It suffices as long as it transmits the driving force for the purpose.
- the transmission wire 25 connected to any of the plurality of sliders 21 is connected to the sandwiching structure, and the transmission wire 25 connected to any of the plurality of sliders 21 is movable so as to adjust the direction of the movable portion 11. It may be arranged on the peripheral surface of the rotating portion of the joint portion 13 included in the portion 11.
- the moving pulley 23 and the conversion wire 27 in the present embodiment correspond to an example of the configuration as the conversion unit.
- Each of the plurality of sliders 21 makes a linear motion along the longitudinal direction of the rectangular shape inside the plurality of openings 22 by the operation of the operator.
- the driving force applied to the transmission wire 25 and the amount of conversion movement due to the linear motion of the slider 21 are transmitted to the movable portion 11.
- the movable portion 11 operates according to the conversion movement amount and the driving force of the transmitted transmission wire 25.
- the operation according to the conversion movement amount and the driving force of the transmitted transmission wire 25 of the movable portion 11 is, for example, the pinching operation by the pinching portion 11A and the pinching portion 11B, the pinching release operation, and the joint portion 13. It is a rotation operation of. That is, the transmission wire 25 that directly or indirectly transmits the driving force and the conversion movement amount to the pinching portion 11A and the pinching portion 11B operates, and the pinching portion 11A and the pinching portion 11B approach or separate from each other with the central axis O as the center. As a result, the pinching operation or the pinching release operation may be performed. As a result, the movable portion 11 may be configured to open the sandwiching structure of the tip portion by the amount of conversion movement.
- the transmission wire 25 that directly or indirectly transmits the driving force and the conversion movement amount to the joint portion 13
- the operation of the rotational displacement of the joint portion 13 centered on the rotary shaft 13A and the rotary shaft 13B is performed. It may be done.
- the movable portion 11 may be configured so that the orientation of the tip portion is adjusted by the amount of conversion movement.
- the movable portion 11 of the treatment unit 10 operates according to the conversion movement amount, it becomes easy to perform detailed work. That is, the operability can be improved in the surgical tool 1 provided with the operation unit having the slider 21 that moves linearly.
- the number of the moving pulleys 23 moving with respect to the slider 21 is limited to two. It's not a thing.
- the number of moving pulleys 23 moving with respect to the slider 21 may be more or less than two.
- two sandwiching portions that sandwich each of the yz plane and the xy plane are arranged, and the transmission wire 25 to which the driving force is transmitted is connected to each of the two, whereby the pinching operation and the pinching operation can be performed. It may be arranged so that the direction in which the release is performed is different.
- the pinching operation may be performed by operating one of the sliders 21 corresponding to each of the plurality of transmission wires 25, and the tip rotation operation may be performed by operating any one of the sliders 21.
- a plurality of functions possessed by one component in the above embodiment may be realized by a plurality of components, or one function possessed by one component may be realized by a plurality of components. .. Further, a plurality of functions possessed by the plurality of components may be realized by one component, or one function realized by the plurality of components may be realized by one component. Further, a part of the configuration of the above embodiment may be omitted. Further, at least a part of the configuration of the above embodiment may be added or replaced with the configuration of the other above embodiment.
Landscapes
- Health & Medical Sciences (AREA)
- Surgery (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Medical Informatics (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Robotics (AREA)
- Surgical Instruments (AREA)
- Manipulator (AREA)
Abstract
直線運動するスライダを有する操作部を備える術具において、操作性を向上させる技術を提供する。 術具は、スライダと、変換部と、伝達ワイヤと、を備える。スライダは、医療処置を行う処置部が少なくとも設けられた本体に対して直線方向に相対移動可能に配置される。変換部は、スライダの移動量を所定の倍率に変換した変換移動量で移動する。伝達ワイヤは、変換移動量を処置部に伝達する。
Description
本開示は、術具に関する。
内視鏡手術などの医療行為を行うために用いられる術具が知られている。当該術具は、例えば先端などに配置された処置部と、操作者が操作する操作部とを有する。そして、操作部の操作がワイヤにより処置部に伝達されることで、操作者の操作に応じて処置部が動作する(特許文献1参照。)。
この種の術具において、操作部が有するスライダが直線運動し、当該スライダの直線運動をワイヤなどにより処置部に伝達させることにより、処置部は当該スライダが操作された移動量だけ動作する。
しかし、例えば、処置部で細かい動作を行う場合、言い換えると、比較的小さい動作量の動作をさせたい場合には当該動作量だけスライダを操作する必要がある。このため、スライダを細かい操作を行う必要があり、操作が困難であった。
本開示の一局面は、直線運動するスライダを有する操作部を備える術具において、操作性を向上させる技術を提供することを目的とする。
本開示の一態様は、術具であって、スライダと、変換部と、伝達ワイヤと、を備える。スライダは、医療処置を行う処置部が少なくとも設けられた本体に対して直線方向に相対移動可能に配置される。変換部は、スライダの移動量を所定の倍率に変換した変換移動量で移動する。伝達ワイヤは、変換移動量を処置部に伝達する。
このような構成によれば、直線運動するスライダの移動量が、変換部において所定の倍率に変換される。このため、変換部において所定の倍率に変換された変換移動量だけ、処置部に伝達される。このため、例えば、所定の倍率を小さくすることにより、スライダの移動量に対して、変換移動量が小さくなる。その結果、変換移動量に応じて処置部が動作するため、細かい作業を行いやすくなる。すなわち、直線運動するスライダを有する操作部を備える術具において、操作性を向上させることができる。
また、本開示の一態様では、変換部は、変換ワイヤと、動滑車と、を備えてもよい。変換ワイヤは、第1の端部がスライダに取り付けられ、第2の端部が本体に取り付けられる。動滑車は、変換ワイヤが周面に配置される。
このような構成によれば、動滑車と変換ワイヤとによりスライダの移動量を所定の倍率に変換することができる。動滑車を設けることにより、所定の倍率に変換することができるため、梃子などの構成を別途設ける必要がなく、当該梃子などの構成を設けることにより術具の構成が大型化することを抑制しやすくなる。
本開示の一態様では、変換部は、スライダの移動方向に対して一方側及び他方側に設けられてもよい。
このような構成によれば、スライダの移動方向に対して一方側及び他方側に設けられた変換部により、スライダの移動量を所定の倍率に変換された変換移動量を処置部に伝達することができる。
1…術具、10…処置部、11…可動部、11A,11B…挟持部、13…関節部、13A,13B…回転軸、20…本体、21…スライダ、22…開口部、23…動滑車、24…定滑車、25…伝達ワイヤ、27…変換ワイヤ、29…固定部、O…中心軸。
[1.構成]
本実施形態における術具1は、手術などの医療行為に用いられる医療機器である。
本実施形態における術具1は、手術などの医療行為に用いられる医療機器である。
図1から図4までの図を用いて術具1の構造を説明する。
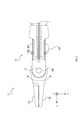
図1に示すように術具1は、処置部10と、本体20と、を備える。
処置部10は、術具1において、医療行為の処置に用いられる部分である。処置部10は、例えば長尺状に形成され、長尺状の第1の端部が本体20と接続される。
処置部10は、少なくとも一部に可動部11を有する。
可動部11は、処置部10の先端部分、すなわち処置部10と本体20とが接続されている第1の端部とは反対側の第2の端部に配置される。なお、可動部11が配置される位置は、本体20と接続される端部と反対側の処置部10の端部に限定されるものではなく処置部10の端部以外の位置に配置されてもよい。
可動部11は、図2に示すように先端部分が2つに分岐し、当該分岐の開閉動作を行うことができるように構成され、当該先端部分を互いに直交する2つの方向にそれぞれ先端部分の向きを調整できるように構成される。すなわち、可動部11は、処置部10に対して変位可能な部位である。可動部11は、例えば鉗子として用いられる部分であってもよい。つまり、可動部11は、処置部10において、処置対象部位や縫合針などを把持可能な把持部として用いられる部位であってもよい。可動部11において2つに分岐した挟持部11A及び挟持部11Bのそれぞれは、中心軸Oを中心にそれぞれが接近した状態である閉じた位置と、離隔した開いた位置との間で回転変位又は揺動可能である。これにより、可動部11は、対象部位等を把持することが可能である。
可動部11の分岐の開閉動作は、分岐された構造に駆動力が伝わることにより動作するものであってもよい。また、先端部分の向きを調整する動作は、当該先端部分の向きを調整する方向に回動する関節部13が配置され、当該関節部13が回動することにより、可動部11の先端方向の向きを調整できる構造に形成されてもよい。可動部11が有する関節部13は、左右方向(後述するx軸方向)に沿って第1の回転軸13Aを有し、上下方向(後述するz軸方向)に沿って第2の回転軸13Bを有してもよい。言い換えると、関節部13は、各回転軸13A、13Bを中心軸として回転変位可能である。なお、第1の回転軸13Aは、処置部10の長手方向に対して直交する軸部である。第2の回転軸13Bは、処置部10の長手方向及び第1の回転軸13Aに対して直交する軸部である。
可動部11は、処置部10が行う動作に対応した構造に形成される。可動部11は、対象物の挟持及び対象物の挟持の解除を行うことができる構造、及び先端部分の向きを調整するように先端部分を回転させる構造の両方を有する構造を有するものに限定されるものではない。対象物の挟持及び対象物の挟持の解除を行うことができる構造、及び先端部分の向きを調整するように先端部分を回転させる構造のいずれか一方のみの構造を有してもよく、また、これらとは異なる動作を行うことができるように構成されてもよい。
本体20には、処置部10が動作を行うために必要な部品等が配置される。
図3、図4及び図5に示すように本体20には、複数のスライダ21と、複数の開口部22、複数の動滑車23と、複数の伝達ワイヤ25と、複数の変換ワイヤ27と、複数の固定部29と、が配置されている。
なお、本体20の上下方向をz軸方向とし、上方向をz軸正方向とも表記し、下方向をz軸負方向とも表記する。また、本体20の開口の矩形形状の長辺方向、すなわち本体20と接続された処置部10の長手方向をy軸方向とし、本体20から見て処置部10が位置する向きをy軸正方向、反対方向をy軸負方向とも表記する。また、yz平面に対して直交する軸をx軸とし、z軸正方向を上方向として、y軸正方向を向いた際の左側をx軸正方向、右側をx軸負方向とも表記する。ここでは、x軸方向を左右方向、z軸方向を上下方向とも表記する。なお、本体20をz軸正側からz軸負方向に見た面を前面、本体20をz軸負側からz軸正方向に見た面を背面とも表記する。
図4に示すように、本体20は、背面に複数の矩形形状の貫通孔である開口部22を有する。矩形形状の開口の数は、スライダ21の数だけ形成される。図3から図5までの図に示すように、本実施形態において本体20が備えるスライダ21の数は3つである。開口部22の数も3つである。なお、スライダ21の数及び開口の数は3つに限定されるものではなく、それぞれ3つより多くてもよく、少なくてもよい。当該開口部22は、矩形形状の長辺方向が、長尺状の処置部10の長手方向に沿った向きとなるように配置される。
複数のスライダ21は、本体20が有する複数の開口部22の内部にそれぞれ配置され、開口部22の長手方向にそれぞれ移動可能に配置される。複数のスライダ21はそれぞれ往復運動することにより可動部11を変位させる駆動力を発生させる。
複数のスライダ21は、それぞれ、直方体形状に形成され、当該直方体形状の長辺が矩形形状の長手方向に沿った向きに配置される。複数のスライダ21は、少なくとも一部の面が本体20の上面及び下面から露出する。
また、複数のスライダ21のy軸方向のそれぞれの端部には、変換ワイヤ27の端部が固定される。
変換ワイヤ27におけるスライダ21に固定された端部と反対側の端部には、本体20に固定される固定部29が設けられている。固定部29は、本体20に固定される。固定部29が配置される位置は特に限定されないが、例えば、本体20における開口部22と隣接する領域であって、x軸方向の中央付近に配置されてもよい。
複数の動滑車23は、1本の変換ワイヤ27につき1つ配置される。動滑車23は、その周面に1本の変換ワイヤ27が添うように配置される。2つの動滑車23の間に1つのスライダ21が位置するように配置される。また、動滑車23は、回転軸が上下方向、言い換えるとz軸方向に延びるように配置される。
また、動滑車23の回転軸を保持する部品に処置部10や可動部11を動作させる駆動力を伝達するワイヤである伝達ワイヤ25が接続される。なお、伝達ワイヤ25は、動滑車23の回転軸を保持する部品に接続されるものに限定されるものではなく、動滑車23の回転軸に直接接続されていてもよい。言い換えると、動滑車23の回転軸と処置部10及び可動部11との間で駆動力が伝達できるように構成されていればよく、駆動力の伝達は直接的であっても間接的であってもよい。
伝達ワイヤ25の第1の端部は、処置部10に近い側の動滑車23の回転軸に取り付けられる。また、伝達ワイヤ25の第1の端部とは異なる端部である第2の端部は、処置部10とは反対側の動滑車23の回転軸に取り付けられる。伝達ワイヤ25は、処置部10に近い側の動滑車23から処置部10や可動部11に向かって延びる。伝達ワイヤ25は、処置部10や可動部11において折り返される。処置部10や可動部11において折り返された伝達ワイヤ25は、本体20に固定された定滑車24に沿って折り返される。定滑車24に沿って折り返された25は、スライダ21に対して処置部10とは反対側の動滑車23の回転軸に取り付けられる。伝達ワイヤ25には、動滑車23及び定滑車24を介してスライダ21の変位が伝達される。
複数の伝達ワイヤ25は、2つに分岐した挟持部11A及び挟持部11Bと関節部13に直接的又は間接的に連結されている。複数の伝達ワイヤ25は、2つに分岐した挟持部11A及び挟持部11Bと関節部13に直接的又は間接的に連結されているものに限定されるものではなく、可動部11に動作を行うための駆動力を伝達するものであればよい。
また、複数のスライダ21のいずれかに接続された伝達ワイヤ25が挟持構造と接続され、複数のスライダ21のいずれかに接続された伝達ワイヤ25が可動部11の方向を調整する構造である可動部11が有する関節部13の回動する部位の周面に配置されてもよい。
なお、本実施形態における動滑車23と変換ワイヤ27とが変換部としての構成の一例に相当する。
[2.作用]
複数のスライダ21と複数の動滑車23と複数の伝達ワイヤ25との動き、及びそれらの動きに可動部11の動くについて説明する。
複数のスライダ21と複数の動滑車23と複数の伝達ワイヤ25との動き、及びそれらの動きに可動部11の動くについて説明する。
複数のスライダ21のそれぞれは、操作者の操作により、複数の開口部22の内部を矩形形状の長手方向に沿って直線運動をする。
スライダ21の直線運動にスライダ21の端部に設けられた変換ワイヤ27は連動する。連動した変換ワイヤ27のそれぞれが周面を通る動滑車23が移動する。そして、動滑車23の回転軸に接続された伝達ワイヤ25の第1の端部が移動することにより、可動部11に接続された伝達ワイヤ25の第2の端部に駆動力が伝達される。伝達ワイヤ25は、スライダ21の直線運動の移動量に応じて、移動する。当該伝達ワイヤ25が移動する移動量を変換移動量とも表記する。
変換移動量は、スライダ21の移動に応じて移動する動滑車23の数に応じて変化する。具体的には、スライダ21の移動量、言い換えると操作者のスライダ21の操作量に対して、移動する動滑車23の数が2つである場合、図6に示すように、それぞれの動滑車23の代わりに固定された定滑車である場合と比べて、2分の1の移動量となる。なお、スライダ21を操作する力の2倍の力が伝達ワイヤ25に駆動力として加えられる。
スライダ21の直線運動に伴い、伝達ワイヤ25に加えられる駆動力および変換移動量は、可動部11に伝達される。可動部11は、伝達された伝達ワイヤ25の変換移動量及び駆動力に応じた動作をする。
本実施形態において、可動部11の伝達された伝達ワイヤ25の変換移動量及び駆動力に応じた動作とは、例えば、挟持部11A及び挟持部11Bによる挟持動作及び挟持の解除動作及び関節部13の回動動作である。すなわち、挟持部11A及び挟持部11Bに直接的又は間接的に駆動力及び変換移動量を伝達する伝達ワイヤ25が動作し、挟持部11A及び挟持部11Bが中心軸Oを中心として接近又は離間することにより挟持動作又は挟持の解除動作が行われてもよい。これにより可動部11は、変換移動量だけ先端部分の挟持構造を開くように構成されてもよい。
また、関節部13に直接的又は間接的に駆動力及び変換移動量を伝達する伝達ワイヤ25が動作することにより、回転軸13A及び回転軸13Bを中心とした関節部13の回転変位の動作が行われてもよい。これにより、可動部11は、変換移動量だけ先端部分の向きが調整されるように構成されてもよい。
[3.効果]
(1)本実施形態では、動滑車23と変換ワイヤ27とにより、スライダ21の直線運動の移動量が、変換移動量に変換され、当該変換移動量だけ伝達ワイヤ25が移動する。当該伝達ワイヤ25の移動量が可動部11に伝達され、可動部11は25の移動量に応じて動作する。
(1)本実施形態では、動滑車23と変換ワイヤ27とにより、スライダ21の直線運動の移動量が、変換移動量に変換され、当該変換移動量だけ伝達ワイヤ25が移動する。当該伝達ワイヤ25の移動量が可動部11に伝達され、可動部11は25の移動量に応じて動作する。
ここで、スライダ21の移動量が伝達される動滑車23及び変換ワイヤ27の数を多くすることにより、スライダ21に対する伝達ワイヤ25の変換移動量が小さくなり、その結果、可動部11に伝達される変換移動量も小さくなる。
その結果、変換移動量に応じて処置部10が有する可動部11が動作するため、細かい作業を行いやすくなる。すなわち、直線運動するスライダ21を有する操作部を備える術具1において、操作性を向上させることができる。
(2)また、動滑車23及び変換ワイヤ27の数を変更することにより、スライダ21の直線運動の移動量に対する伝達ワイヤ25の変換移動量を変更することができる。すなわち、固定された定滑車を動滑車23に変更する数により、スライダ21の移動量に対する伝達ワイヤ25の変換移動量を変更することができる。このため、例えば、伝達ワイヤ25の移動量に変換するために、梃子などの構成を配置する必要がない。梃子などの構成を備える場合に比べて、本体20の大きさが大型化することを抑制することができる。
[4.実施形態の変形例]
(1)上記実施形態では、スライダ21の数は複数であるが、スライダ21の数は複数に限定されるものではなく、1つであってもよい。
(1)上記実施形態では、スライダ21の数は複数であるが、スライダ21の数は複数に限定されるものではなく、1つであってもよい。
(2)また、上記実施形態では、1つのスライダ21に対して2つの動滑車23が移動する例を記載したが、スライダ21に対して移動する動滑車23の数は2つに限定されるものではない。例えば、スライダ21に対して移動する動滑車23の数は、2つより多くても少なくてもよい。
ここで、スライダ21の数に対して移動する動滑車23の数が多くなるにしたがって、スライダ21の移動量に対する動滑車23それぞれの移動量は小さくなる。これにより動作量を、スライダ21と接続される動滑車23の数を調整することにより、スライダ21の操作量に対する可動部11の動作量を調整することができる。
(3)複数の伝達ワイヤ25は、それぞれ可動部11の異なる部位と接続されていてもよい。
また、可動部11は、異なる部位に接続された伝達ワイヤ25のそれぞれが移動することにより、当該移動した伝達ワイヤ25が接続された部位に応じて異なる動きをしてもよい。
具体的には、例えば、yz平面、xy平面のそれぞれを挟み込む2つの挟持部が配置され、2つのそれぞれに駆動力が伝達される伝達ワイヤ25が接続されることによって、挟持動作及び挟持動作の解除を行う向きが異なるように配置されてもよい。
さらに、可動部11の動作は挟持動作に限定されるものではなく、可動部11の先端部分の向きを調整可能に回転動作するように形成されてもよい。
また、複数の伝達ワイヤ25のそれぞれに対応したスライダ21のうち、いずれかを操作することにより挟持動作が行われ、いずれかを操作することにより先端の回転動作が行われてもよい。
(4)上記実施形態では、複数の動滑車23は、それぞれに対応するスライダ21の移動に応じて移動する。しかしながら、複数の動滑車23は、スライダ21の移動に応じて移動するものに限定されるものではなく、固定された状態と移動する状態とを変更できるように構成されてもよい。
(5)上記実施形態では、スライダ21の露出部が操作者により操作され、変位するように構成される。しかし、スライダ21の露出部が操作者により直接操作されるものに限定されるものではない。例えば、各スライダ21は、空気圧シリンダーなどから駆動力を得て変位するものであってもよい。
(6)上記実施形態における1つの構成要素が有する複数の機能を、複数の構成要素によって実現したり、1つの構成要素が有する1つの機能を、複数の構成要素によって実現したりしてもよい。また、複数の構成要素が有する複数の機能を、1つの構成要素によって実現したり、複数の構成要素によって実現される1つの機能を、1つの構成要素によって実現したりしてもよい。また、上記実施形態の構成の一部を省略してもよい。また、上記実施形態の構成の少なくとも一部を、他の上記実施形態の構成に対して付加又は置換してもよい。
Claims (3)
- 医療処置を行う処置部が少なくとも設けられた本体に対して直線方向に相対移動可能に配置されたスライダと、
前記スライダの移動量を所定の倍率に変換した変換移動量で移動する変換部と、
前記変換移動量を前記処置部に伝達する伝達ワイヤと、
を備える、術具。 - 請求項1に記載の術具であって、
前記変換部は、第1の端部が前記スライダに取り付けられ、第2の端部が前記本体に取り付けられた変換ワイヤと、
前記変換ワイヤが周面に配置された動滑車と、
を備える、術具。 - 請求項1又は請求項2に記載の術具であって、
前記変換部は、前記スライダの移動方向に対して一方側及び他方側に設けられた、術具。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021539529A JP6991637B1 (ja) | 2020-09-01 | 2020-09-01 | 術具 |
| EP20952371.1A EP4193955A4 (en) | 2020-09-01 | 2020-09-01 | SURGICAL TOOL |
| CN202080103643.2A CN116113382A (zh) | 2020-09-01 | 2020-09-01 | 手术工具 |
| PCT/JP2020/033087 WO2022049631A1 (ja) | 2020-09-01 | 2020-09-01 | 術具 |
| US18/176,045 US20230210509A1 (en) | 2020-09-01 | 2023-02-28 | Surgical tool |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2020/033087 WO2022049631A1 (ja) | 2020-09-01 | 2020-09-01 | 術具 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US18/176,045 Continuation US20230210509A1 (en) | 2020-09-01 | 2023-02-28 | Surgical tool |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2022049631A1 true WO2022049631A1 (ja) | 2022-03-10 |
Family
ID=80213729
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2020/033087 WO2022049631A1 (ja) | 2020-09-01 | 2020-09-01 | 術具 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20230210509A1 (ja) |
| EP (1) | EP4193955A4 (ja) |
| JP (1) | JP6991637B1 (ja) |
| CN (1) | CN116113382A (ja) |
| WO (1) | WO2022049631A1 (ja) |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04329939A (ja) * | 1991-01-25 | 1992-11-18 | Olympus Optical Co Ltd | 内視鏡用処置具 |
| JPH11104137A (ja) * | 1997-09-30 | 1999-04-20 | Asahi Optical Co Ltd | 生検鉗子 |
| WO2017208320A1 (ja) * | 2016-05-31 | 2017-12-07 | オリンパス株式会社 | 把持機構および把持具 |
| US20190231465A1 (en) * | 2015-05-22 | 2019-08-01 | Cmr Surgical Limited | Surgical instrument driving mechanism |
| CN110353807A (zh) * | 2018-04-10 | 2019-10-22 | 苏州迈澜医疗科技有限公司 | 牵引装置和具有该牵引装置的操纵装置 |
| JP2019530530A (ja) * | 2016-10-14 | 2019-10-24 | シーエムアール・サージカル・リミテッドCmr Surgical Limited | 手術器具を関節駆動するための駆動配置 |
| WO2019244799A1 (ja) * | 2018-06-20 | 2019-12-26 | リバーフィールド株式会社 | 手術具 |
-
2020
- 2020-09-01 CN CN202080103643.2A patent/CN116113382A/zh active Pending
- 2020-09-01 JP JP2021539529A patent/JP6991637B1/ja active Active
- 2020-09-01 WO PCT/JP2020/033087 patent/WO2022049631A1/ja unknown
- 2020-09-01 EP EP20952371.1A patent/EP4193955A4/en active Pending
-
2023
- 2023-02-28 US US18/176,045 patent/US20230210509A1/en active Pending
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04329939A (ja) * | 1991-01-25 | 1992-11-18 | Olympus Optical Co Ltd | 内視鏡用処置具 |
| JPH11104137A (ja) * | 1997-09-30 | 1999-04-20 | Asahi Optical Co Ltd | 生検鉗子 |
| US20190231465A1 (en) * | 2015-05-22 | 2019-08-01 | Cmr Surgical Limited | Surgical instrument driving mechanism |
| WO2017208320A1 (ja) * | 2016-05-31 | 2017-12-07 | オリンパス株式会社 | 把持機構および把持具 |
| JP2019530530A (ja) * | 2016-10-14 | 2019-10-24 | シーエムアール・サージカル・リミテッドCmr Surgical Limited | 手術器具を関節駆動するための駆動配置 |
| CN110353807A (zh) * | 2018-04-10 | 2019-10-22 | 苏州迈澜医疗科技有限公司 | 牵引装置和具有该牵引装置的操纵装置 |
| WO2019244799A1 (ja) * | 2018-06-20 | 2019-12-26 | リバーフィールド株式会社 | 手術具 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20230210509A1 (en) | 2023-07-06 |
| EP4193955A1 (en) | 2023-06-14 |
| EP4193955A4 (en) | 2023-09-27 |
| JPWO2022049631A1 (ja) | 2022-03-10 |
| JP6991637B1 (ja) | 2022-01-13 |
| CN116113382A (zh) | 2023-05-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11241247B2 (en) | Snakelike surgical instrument | |
| US9027431B2 (en) | Remote centre of motion positioner | |
| JP6865970B2 (ja) | ロボット外科手術アセンブリ | |
| CN109414297B (zh) | 用于机器人式的手术系统的操纵器的仪器携载装置 | |
| US20230301730A1 (en) | Device and method for controlled motion of a tool | |
| US11497567B2 (en) | Jointed control platform | |
| JP4534004B2 (ja) | マニピュレータ | |
| JP2020096991A (ja) | 機械的利益把握のロボット制御 | |
| US11592087B2 (en) | Instrument transmission converting roll to linear actuation | |
| JP5323578B2 (ja) | 医療用ロボットシステム | |
| CN105193469A (zh) | 具有复设的闭合机构的末端执行器 | |
| CN107771065B (zh) | 用于机器人远程手术应用的手动腹腔镜手术器械的装置 | |
| JP2012187311A (ja) | 医療用処置具およびマニピュレータ | |
| KR20150022414A (ko) | 복강경 수술용 로봇 | |
| WO2013062132A1 (en) | Medical manipulator | |
| CN107320183A (zh) | 一种用于微创手术机器人的手术器械及微创手术机器人 | |
| EP1843713A1 (en) | Robotized system for the control and micrometric actuation of an endoscope | |
| CN111388090A (zh) | 一种手术器械、手术器械系统及手术机器人 | |
| WO2022049631A1 (ja) | 術具 | |
| WO2020035893A1 (ja) | 手術用マニピュレータ | |
| JP2018111142A (ja) | アーム装置 | |
| JP2024516435A (ja) | バックエンド伝動装置、医療機器および手術用ロボット | |
| JP7017286B1 (ja) | 手術器具 | |
| CN214434485U (zh) | 手术器械、执行机构及手术机器人 | |
| US20220313376A1 (en) | Medical robot and attachment portion of medical robot |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| ENP | Entry into the national phase |
Ref document number: 2021539529 Country of ref document: JP Kind code of ref document: A |
|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 20952371 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2020952371 Country of ref document: EP Effective date: 20230306 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |