WO2021245930A1 - 画像処理装置、画像処理方法、および画像処理プログラム - Google Patents
画像処理装置、画像処理方法、および画像処理プログラム Download PDFInfo
- Publication number
- WO2021245930A1 WO2021245930A1 PCT/JP2020/022375 JP2020022375W WO2021245930A1 WO 2021245930 A1 WO2021245930 A1 WO 2021245930A1 JP 2020022375 W JP2020022375 W JP 2020022375W WO 2021245930 A1 WO2021245930 A1 WO 2021245930A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- information
- image
- correction
- image object
- depth map
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images






Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T19/00—Manipulating three-dimensional [3D] models or images for computer graphics
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/10—Processing, recording or transmission of stereoscopic or multi-view image signals
- H04N13/106—Processing image signals
- H04N13/128—Adjusting depth or disparity
Definitions
- the present invention relates to an image processing apparatus, an image processing method, and an image processing program.
- Patent Document 1 depth information indicated by the distance from the shooting point to the corresponding object is calculated for each subject in the image information based on the captured image information, and 3D image information is generated using the calculated information.
- the position of each object is recognized by considering not only the distance from the human to each object but also the difference in the degree of attention based on the characteristics of each object by the human. Therefore, when the 3D image information is generated from the captured 2D image information, if the position of the object is determined based only on the depth information of each object, the 3D image information becomes unnatural and unrealistic. There was a problem that there were cases.
- the present invention has been made in view of the above circumstances, and is an image processing device and an image processing method capable of generating depth information for generating natural and realistic 3D image information from two-dimensional image information. , And an image processing program.
- one aspect of the present invention is an image processing device, in which two-dimensional image information obtained by photographing a plurality of subjects is input, and from the two-dimensional image information, an image portion corresponding to each subject is used.
- An image object extraction unit that extracts a plurality of image objects and acquires tag information indicating the shape information of the corresponding image object and the type of the corresponding subject as bibliographic information regarding each extracted image object information, and the two-dimensional image. From the information, tag information corresponding to the type of subject that can be the target of attention among the depth map generation unit that generates the depth map showing the depth of each image object and the image object extracted by the image object extraction unit is provided.
- the first correction information calculation unit and the first correction information calculation unit that select the image object to have and calculate the first correction information for correcting the depth map so as to make the depth of the selected image object shallow. It is provided with a depth map correction unit that corrects the depth information of the corresponding image object in the depth map based on the first correction information.
- One aspect of the present invention is an image processing method, in which two-dimensional image information obtained by photographing a plurality of subjects is input, and a plurality of image objects which are image portions corresponding to each subject are extracted from the two-dimensional image information.
- the image object extraction step for acquiring the shape information of the corresponding image object and the tag information indicating the type of the corresponding subject as the bibliographic information regarding each extracted image object information, and the image object extraction step for each of the image objects from the two-dimensional image information. From the image objects extracted in the depth map generation step for generating a depth map showing the depth and the image object extraction step, an image object having tag information corresponding to the type of subject that can be the target of attention is selected and selected.
- the first correction information calculation step for calculating the first correction information for correcting the depth map so as to make the depth of the image object shallow, and the first correction information calculated in the first correction information calculation step. It also has a depth map correction step that corrects the depth information of the corresponding image object in the depth map.
- One aspect of the present invention is an image processing program that causes a computer to function as the image device.
- an image processing device capable of generating depth information for generating natural and realistic 3D image information from two-dimensional image information are provided. be able to.
- FIG. 1 is a block diagram showing a configuration of an image processing apparatus according to an embodiment of the present invention.
- FIG. 2 is a flowchart showing the operation of the bibliographic information acquisition unit of one embodiment.
- FIG. 3 is a flowchart showing the operation of the area division portion of one embodiment.
- FIG. 4 is a flowchart showing the operation of the first correction information calculation unit of one embodiment.
- FIG. 5 is a table showing an example of a first correction table held in the first correction information calculation unit of one embodiment.
- FIG. 6 is a flowchart showing the operation of the second correction information calculation unit of one embodiment.
- FIG. 7 is a flowchart showing the operation of the depth map correction unit of one embodiment.
- FIG. 8 is an example of hardware configuration.
- the image processing device 1 includes a CPU 10 and an information storage unit 20.
- the CPU 10 has a preprocessing unit 11, a depth map generation unit 12, a first correction information calculation unit 13, a second correction information calculation unit 14, and a depth map correction unit 15.
- the preprocessing unit 11 has an image object extraction unit 111 and an area division unit 112.
- the image object extraction unit 111 inputs two-dimensional image information obtained by photographing a plurality of subjects, and extracts a plurality of image objects which are image portions corresponding to each subject from the input two-dimensional image information. Then, as the bibliographic information regarding each of the extracted image object information, information including the shape information of the corresponding image object and the tag information indicating the type of the corresponding subject is acquired.
- the area division unit 112 divides the input two-dimensional image information into each area composed of a set of pixels having similar characteristics. Then, the shape information, the representative position information, and the representative image information of each divided region are acquired. The details of the representative position information and the representative image information will be described later.
- the depth map generation unit 12 generates a depth map showing the depth of each image object from the input two-dimensional image information.
- the first correction information calculation unit 13 selects an image object having tag information corresponding to the type of subject that can be the target of attention from the image objects extracted by the image object extraction unit 111, and the depth of the selected image object.
- the first correction information for correcting the depth map so as to make the depth map shallow is calculated.
- the second correction information calculation unit 14 calculates the second correction information for correcting the depth map so as to deepen the depth of the area other than the image object to be corrected by the first correction information.
- the depth map correction unit 15 corrects the depth information of the corresponding image object in the depth map based on the first correction information calculated by the first correction information calculation unit 13, and also corrects the area other than the image object.
- the second correction information is used for correction.
- the information storage unit 20 stores the information of the depth map corrected by the depth map correction unit 15.
- two-dimensional image information P in which a plurality of subjects are photographed is input to the image processing device 1, and acquired by the image object extraction unit 111 and the area division unit 112 of the preprocessing unit 11 of the CPU 10, and the depth map generation unit 12. Will be done.
- the process executed by the image object extraction unit 111 that has acquired the two-dimensional image information P will be described with reference to the flowchart of FIG.
- the image object extraction unit 111 acquires the input two-dimensional image information P (S1)
- the image object extraction unit 111 extracts n image objects X1 to Xn, which are image portions corresponding to each subject, from the two-dimensional image information P. (S2).
- an existing technique for example, a technique using machine learning or pattern matching can be used.
- the image object extraction unit 111 acquires bibliographic information including shape information of each of the corresponding image objects X1 to Xn and tag information indicating the type of the corresponding subject for each of the extracted image object information X1 to Xn (S3). .. Further, the shape information of each of the acquired image objects X1 to Xn is further analyzed, and the center of gravity position information of each of the corresponding image objects X1 to Xn, the area ratio in the two-dimensional image information P, and the average luminance value are calculated (S4). ). The image object extraction unit 111 sends these acquired information to the first correction information calculation unit 13 and the second correction information calculation unit 14 (S5).
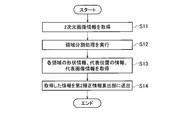
- the region division unit 112 When the region division unit 112 acquires the input two-dimensional image information P (S11), the region division unit 112 divides the two-dimensional image information P into m regions Z1 to Zm composed of a set of pixels having similar characteristics. (S12). In these areas Z1 to Zm, for example, the difference between the RGB value and the luminance value between arbitrary adjacent pixels in the two-dimensional image information P is calculated, and the calculated value is equal to or less than a predetermined value. In some cases, it is divided by determining that these pixels belong to the same region.
- the area division unit 112 acquires the shape information of each of the divided areas Z1 to Zm, and the feature amount information including the representative position information and the representative image information (S13).
- the information on the representative positions of each region Z1 to Zm may be any coordinate within the corresponding region, and may be, for example, a position where at least one of the x coordinate and the y coordinate is the minimum, or the position of the center of gravity of the corresponding region. ..
- the representative image information of each region Z1 to Zm is indicated by an average value of RGB values in the corresponding region, an average value of luminance values, or an average value of values calculated from both values.
- the area division unit 112 sends these acquired information to the second correction information calculation unit 14 (S14).
- the depth map generation unit 12 when the depth map generation unit 12 that has acquired the two-dimensional image information P acquires the input two-dimensional image information P, the depth map M indicating the depth of each image object is generated from the two-dimensional image information P. ..
- the depth map generation unit 12 When the acquired two-dimensional image information P is captured by a monocular camera, the depth map generation unit 12 generates a depth map M using one image information captured by the camera device, and captures the image with a stereo camera. If so, a depth map M is generated using a plurality of image information taken from different positions.
- the depth map generation unit 12 sends the generated depth map M information to the depth map correction unit 15.
- the first correction information calculation unit 13 selects an image object corresponding to a subject that can be a target of attention from the image objects X1 to Xn extracted by the image object extraction unit 111 (S21).
- the first correction information calculation unit 13 holds the first correction table shown in FIG. 5 in advance.
- this first correction table the depth of the image object becomes shallower as the possibility of paying attention to each of the preset image objects corresponding to the subject that the person who visually recognizes the image information is likely to pay attention to.
- the ⁇ value for correcting the depth map is stored.
- the types of image objects corresponding to the subjects that the person who visually recognizes the image information is likely to pay attention to are “person”, “car”, “bus”, “train”, and “ “Airplane” is set, and "people: 34.8", “car: 30.7”, “bus: 30.2”, “train: 29.7”, and “airplane: 10.3” are stored as ⁇ values corresponding to these.
- the first correction information calculation unit 13 refers to the first correction table, and among the image objects X1 to Xn extracted by the image object extraction unit 111, the tag information of the type set in the first correction table is input.
- the image object to be possessed is selected as the image object corresponding to the subject that can be the target of attention.
- an image object whose center of gravity is within a range of 50% in each of the vertical and horizontal sizes from the center position of the entire 2D image information P 2) is applicable.
- the two-dimensional image information P is one frame constituting the moving image information, and the motion is detected based on the previous and next frames.
- Less than a predetermined number of image objects are further selected in descending order of priority.
- the image object X1 of "person" is selected.
- the first correction information calculation unit 13 refers to the first correction table and acquires the ⁇ value “34.8” corresponding to the type “person” of the selected image object X1 (S22). Next, the first correction information calculation unit 13 updates the acquired ⁇ value so that the larger the area of the image object X1 in the two-dimensional image information P, the shallower the depth of the image object X1, and the first correction is made. Information is calculated (S23).
- the first correction information calculation unit 13 has a value indicating the area ratio of the selected image object X1 in the two-dimensional image information P, specifically, The first correction information calculation unit 13 is a positive value (0.01 or more and less than 0.99) corresponding to the area of the image object X1 when the area of the two-dimensional image information P is 1 based on the shape information of the image object X1. Get a fraction). Then, the acquired value is added to the ⁇ value “34.8” acquired in step S22 to update the ⁇ value of the “person”, and the updated first correction table is calculated as the first correction information.
- the two-dimensional image information P is one frame constituting the moving image information
- all the image objects selected in all the frames constituting the moving image information are the same as in the case of the still image information described above.
- the average value is added to the ⁇ value corresponding to each corresponding image object, and the updated first correction table is calculated as the first correction information.
- the ⁇ value of the subject that did not appear in the moving image information among the information in the first correction table is set to a predetermined value (a positive decimal number of 0.01 or more and less than 0.99). Subtract.
- the first correction information calculation unit 13 may update the first correction information based on the information of the depth map generated for other two-dimensional image information related to the two-dimensional image information P to be processed. For example, with respect to an image object whose depth is deeper than a predetermined value in other 2D image information in the moving image information including the 2D image information P, the depth in the 2D image information P to be processed is determined.
- the first correction information may be calculated by updating the corresponding ⁇ value so as to be shallow.
- the third correction information G is obtained by using the grayscale value g of the image object. Calculated by the following formula (1).
- an image object an image object with a grayscale value of 0-127
- a grayscale value of 0-127 that is reflected in the image information at a position deeper than a predetermined value and is not subject to the ⁇ value update process.
- the first correction information calculation unit 13 sends the calculated first correction information to the depth map correction unit 15 at a predetermined timing (S24).
- the transmission of the first correction information to the depth map correction unit 15 is, for example, the timing when the first correction information is calculated for each frame, the timing when a scene change is detected, or the timing when a scene change is detected. It is executed at any of the timings when the first correction information calculation process for all frames of the moving image information is completed.
- the first correction information is calculated at the timing calculated for each frame. Execute the transmission process.
- the transmission processing of the first correction information is executed at the timing when the scene change is detected.
- the timing when the first correction information calculation processing of all frames of the moving image information is completed is completed.
- the first correction information transmission process is executed.
- the second correction information calculation unit 14 calculates the second correction information for correcting the area other than the image object extracted by the first correction information.
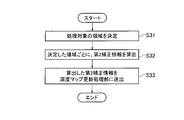
- the second correction information calculation unit 14 determines the region Zi having only one adjacent region among the regions Z1 to Zm divided by the region division unit 112 as the calculation target of the second correction information. At this time, the area adjacent to the area Zi is defined as the area Zj.
- the length of the boundary line with each adjacent area is calculated, and the calculated boundary line length is calculated.
- Select the largest area Zj is calculated.
- the areas of the region Zi and the selected region Zj are compared, and the region Zi in which Zi ⁇ Zj is determined as the calculation target of the second correction information (S31). That is, a region larger than any of the adjacent regions is set as the calculation target of the second correction information.
- the number of areas to be calculated depends on the characteristics of the image information to be processed.
- the second correction information is calculated using the feature amount of the region Zi and the feature amount of the adjacent region Zj for each region Zi determined as the calculation target (S32).
- D be the distance between the representative position of the region Zi and the center position of the two-dimensional image information P.
- R be the difference between the average values of the RGB values among the representative image information of the region Zi and the region Zj.
- L be the difference between the average values of the luminance values among the representative image information of the region Zi and the region Zj.
- the second correction information calculation unit 14 calculates the second correction information CV of the region Zi by the following equation (2).
- the representative position of the region Zi is far from the center position of the two-dimensional image information P, and the average RGB values and the average luminance values of the region Zi and the largest region Zj adjacent to the region Zi are averaged.
- the larger the difference between the values the smaller the second correction information CV is calculated.
- the second correction information calculation unit 14 sends the calculated second correction information CV to the depth map correction unit 15 (S33).
- the depth map correction unit 15 analyzes the information of the depth map M generated by the depth map generation unit 12, and normalizes the grayscale value of each image object to the value of 256 gradations of 1-256 (S41). ). Next, based on the first correction information acquired from the first correction information calculation unit 13, the corresponding ⁇ value is added to the gray scale value of the image object in which the ⁇ value in the depth map M is set (S42). ).
- the depth map correction unit 15 converts the second correction information CV acquired from the second correction information calculation unit 14 into a value less than 1 by a predetermined calculation formula, and the gray scale value other than the region to which the ⁇ value is added.
- the ⁇ value is reduced by multiplying by (S43).
- the depth map M is corrected by renormalizing the grayscale values corrected by the first correction information and the second correction information to 256 gradations of 0-255 (S44).
- the corrected depth map M information is stored in the information storage unit 20.
- the depth map information for each image object generated from the two-dimensional image information is shallow for the image object that is expected to attract the attention of the user, and the depth is set for the background area. It can be adjusted and generated to be deeper.
- 3D image information is generated using the depth map generated in this way, the image object with high user attention becomes visible in the foreground, and natural and realistic 3D image information is generated. ..
- FIG. 8 a general-purpose computer system as shown in FIG. 8 can be used.
- the computer system shown is a CPU (Central Processing Unit, processor) 101, a memory 102, a storage 103 (HDD: Hard Disk Drive, SSD: Solid State Drive), a communication device 104, an input device 105, and an output device. It is equipped with 106.
- the memory 102 and the storage 103 are storage devices.
- each function of the image processing device 1 is realized by executing a predetermined program loaded on the memory 102 by the CPU 101.
- the image processing device 1 may be mounted on one computer or may be mounted on a plurality of computers. Further, the image processing device 1 may be a virtual machine mounted on a computer.
- the program for the image processing device 1 can be stored in a computer-readable recording medium such as an HDD, SSD, USB (Universal Serial Bus) memory, CD (Compact Disc), DVD (Digital Versatile Disc), or via a network. It can also be delivered.
- a computer-readable recording medium such as an HDD, SSD, USB (Universal Serial Bus) memory, CD (Compact Disc), DVD (Digital Versatile Disc), or via a network. It can also be delivered.
- Image processing device 10 CPU 11 Pre-processing unit 12 Depth map generation unit 13 1st correction information calculation unit 14 2nd correction information calculation unit 15 Depth map correction unit 20 Information storage unit 101 CPU 102 Memory 103 Storage 104 Communication device 105 Input device 106 Output device 111 Image object extraction unit 112 Area division unit
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Computer Graphics (AREA)
- Computer Hardware Design (AREA)
- General Engineering & Computer Science (AREA)
- Software Systems (AREA)
- Theoretical Computer Science (AREA)
- Image Analysis (AREA)
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2022528388A JPWO2021245930A1 (https=) | 2020-06-05 | 2020-06-05 | |
| PCT/JP2020/022375 WO2021245930A1 (ja) | 2020-06-05 | 2020-06-05 | 画像処理装置、画像処理方法、および画像処理プログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2020/022375 WO2021245930A1 (ja) | 2020-06-05 | 2020-06-05 | 画像処理装置、画像処理方法、および画像処理プログラム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2021245930A1 true WO2021245930A1 (ja) | 2021-12-09 |
Family
ID=78830750
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2020/022375 Ceased WO2021245930A1 (ja) | 2020-06-05 | 2020-06-05 | 画像処理装置、画像処理方法、および画像処理プログラム |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JPWO2021245930A1 (https=) |
| WO (1) | WO2021245930A1 (https=) |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009053748A (ja) * | 2007-08-23 | 2009-03-12 | Nikon Corp | 画像処理装置、画像処理プログラムおよびカメラ |
| JP2012109725A (ja) * | 2010-11-16 | 2012-06-07 | Canon Inc | 立体映像処理装置および立体映像処理方法 |
| JP2019102828A (ja) * | 2017-11-28 | 2019-06-24 | 大日本印刷株式会社 | 画像処理装置、画像処理方法、及び画像処理プログラム |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1040420A (ja) * | 1996-07-24 | 1998-02-13 | Sanyo Electric Co Ltd | 奥行き感制御方法 |
| KR101547151B1 (ko) * | 2008-12-26 | 2015-08-25 | 삼성전자주식회사 | 영상 처리 방법 및 장치 |
| WO2011033673A1 (ja) * | 2009-09-18 | 2011-03-24 | 株式会社 東芝 | 画像処理装置 |
| JP2012004654A (ja) * | 2010-06-14 | 2012-01-05 | Sharp Corp | 映像表示装置及びその表示制御方法 |
| JP5355616B2 (ja) * | 2011-04-21 | 2013-11-27 | 株式会社エム・ソフト | 立体視画像生成方法および立体視画像生成システム |
| JP6024110B2 (ja) * | 2012-01-26 | 2016-11-09 | ソニー株式会社 | 画像処理装置、画像処理方法、プログラム、端末装置及び画像処理システム |
| JP5871705B2 (ja) * | 2012-04-27 | 2016-03-01 | 株式会社日立メディコ | 画像表示装置、方法及びプログラム |
| JP6351238B2 (ja) * | 2013-11-15 | 2018-07-04 | キヤノン株式会社 | 画像処理装置、撮像装置および距離補正方法 |
| JP6904346B2 (ja) * | 2016-06-22 | 2021-07-14 | ソニーグループ株式会社 | 画像処理装置、画像処理システム、および画像処理方法、並びにプログラム |
| CN109952599A (zh) * | 2016-11-21 | 2019-06-28 | 索尼公司 | 信息处理设备、信息处理方法和程序 |
-
2020
- 2020-06-05 JP JP2022528388A patent/JPWO2021245930A1/ja active Pending
- 2020-06-05 WO PCT/JP2020/022375 patent/WO2021245930A1/ja not_active Ceased
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009053748A (ja) * | 2007-08-23 | 2009-03-12 | Nikon Corp | 画像処理装置、画像処理プログラムおよびカメラ |
| JP2012109725A (ja) * | 2010-11-16 | 2012-06-07 | Canon Inc | 立体映像処理装置および立体映像処理方法 |
| JP2019102828A (ja) * | 2017-11-28 | 2019-06-24 | 大日本印刷株式会社 | 画像処理装置、画像処理方法、及び画像処理プログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2021245930A1 (https=) | 2021-12-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4966431B2 (ja) | 画像処理装置 | |
| JP5197683B2 (ja) | 奥行き信号生成装置及び方法 | |
| US11132544B2 (en) | Visual fatigue recognition method, visual fatigue recognition device, virtual reality apparatus and storage medium | |
| US8565513B2 (en) | Image processing method for providing depth information and image processing system using the same | |
| CN109034017A (zh) | 头部姿态估计方法及机器可读存储介质 | |
| JP2011113363A (ja) | 画像処理装置、画像処理方法、およびプログラム | |
| US9519956B2 (en) | Processing stereo images | |
| JP5238767B2 (ja) | 視差画像生成方法及び装置 | |
| KR20110014067A (ko) | 스테레오 컨텐트의 변환 방법 및 시스템 | |
| JP6908025B2 (ja) | 画像処理装置と画像処理方法 | |
| JP2017021759A (ja) | 画像処理装置、画像処理方法及びプログラム | |
| JP2010152521A (ja) | 画像立体化処理装置及び方法 | |
| JP2014035597A (ja) | 画像処理装置、コンピュータプログラム、記録媒体及び画像処理方法 | |
| KR101970562B1 (ko) | 3차원 입체 영상의 깊이지도 보정장치 및 보정방법 | |
| JP2019091122A (ja) | デプスマップフィルタ処理装置、デプスマップフィルタ処理方法及びプログラム | |
| KR101125061B1 (ko) | Ldi 기법 깊이맵을 참조한 2d 동영상의 3d 동영상 전환방법 | |
| JP2020009255A (ja) | 三次元形状モデル生成装置、三次元モデル生成方法及びプログラム | |
| CN114677393B (zh) | 深度图像处理方法、装置、摄像设备、会议系统及介质 | |
| CN101873506B (zh) | 提供深度信息的影像处理方法及其影像处理系统 | |
| WO2021245930A1 (ja) | 画像処理装置、画像処理方法、および画像処理プログラム | |
| CN110136085B (zh) | 一种图像的降噪方法及装置 | |
| JP2013101558A (ja) | 画像処理方法、画像処理装置及び画像処理プログラム | |
| JP2020181399A (ja) | 画像処理装置及びその制御方法及びプログラム | |
| WO2019116487A1 (ja) | 画像処理装置、画像処理方法および画像処理プログラム | |
| JP7436918B2 (ja) | 画像処理装置、画像処理方法、および画像処理プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 20939299 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2022528388 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 20939299 Country of ref document: EP Kind code of ref document: A1 |