WO2021200340A1 - 提示制御装置及び提示制御プログラム - Google Patents
提示制御装置及び提示制御プログラム Download PDFInfo
- Publication number
- WO2021200340A1 WO2021200340A1 PCT/JP2021/011734 JP2021011734W WO2021200340A1 WO 2021200340 A1 WO2021200340 A1 WO 2021200340A1 JP 2021011734 W JP2021011734 W JP 2021011734W WO 2021200340 A1 WO2021200340 A1 WO 2021200340A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- vehicle
- automatic driving
- traffic jam
- driver
- unit
- Prior art date
Links
- 238000012545 processing Methods 0.000 claims description 48
- 230000009471 action Effects 0.000 claims description 25
- 238000000034 method Methods 0.000 description 121
- 230000008569 process Effects 0.000 description 115
- 230000006870 function Effects 0.000 description 85
- 230000008859 change Effects 0.000 description 34
- 230000002093 peripheral effect Effects 0.000 description 24
- 208000019901 Anxiety disease Diseases 0.000 description 22
- 230000036506 anxiety Effects 0.000 description 22
- 238000012544 monitoring process Methods 0.000 description 22
- 238000001514 detection method Methods 0.000 description 18
- 238000004891 communication Methods 0.000 description 12
- 238000012986 modification Methods 0.000 description 11
- 230000004048 modification Effects 0.000 description 11
- 230000008030 elimination Effects 0.000 description 7
- 238000003379 elimination reaction Methods 0.000 description 7
- 238000005728 strengthening Methods 0.000 description 5
- 238000003384 imaging method Methods 0.000 description 4
- 238000004590 computer program Methods 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 235000012054 meals Nutrition 0.000 description 3
- 238000013461 design Methods 0.000 description 2
- 230000001133 acceleration Effects 0.000 description 1
- 230000003044 adaptive effect Effects 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 238000013528 artificial neural network Methods 0.000 description 1
- 230000004397 blinking Effects 0.000 description 1
- 150000001875 compounds Chemical class 0.000 description 1
- 239000000284 extract Substances 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 238000010801 machine learning Methods 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 230000002040 relaxant effect Effects 0.000 description 1
- 238000010079 rubber tapping Methods 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
Images





























Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Arrangement of adaptations of instruments
-
- B60K35/28—
-
- B60K35/29—
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/095—Predicting travel path or likelihood of collision
- B60W30/0956—Predicting travel path or likelihood of collision the prediction being responsive to traffic or environmental parameters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/02—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to ambient conditions
- B60W40/04—Traffic conditions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/02—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to ambient conditions
- B60W40/06—Road conditions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/10—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to vehicle motion
- B60W40/105—Speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/001—Planning or execution of driving tasks
- B60W60/0027—Planning or execution of driving tasks using trajectory prediction for other traffic participants
- B60W60/00274—Planning or execution of driving tasks using trajectory prediction for other traffic participants considering possible movement changes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/005—Handover processes
- B60W60/0059—Estimation of the risk associated with autonomous or manual driving, e.g. situation too complex, sensor failure or driver incapacity
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
-
- B60K2360/175—
-
- B60K2360/178—
-
- B60K2360/195—
-
- B60K35/81—
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W2050/146—Display means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/40—Dynamic objects, e.g. animals, windblown objects
- B60W2554/404—Characteristics
- B60W2554/4044—Direction of movement, e.g. backwards
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/40—Dynamic objects, e.g. animals, windblown objects
- B60W2554/404—Characteristics
- B60W2554/4045—Intention, e.g. lane change or imminent movement
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/40—Dynamic objects, e.g. animals, windblown objects
- B60W2554/404—Characteristics
- B60W2554/4046—Behavior, e.g. aggressive or erratic
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/40—Dynamic objects, e.g. animals, windblown objects
- B60W2554/406—Traffic density
Definitions
- the disclosure according to this specification relates to a presentation control device and a presentation control program that control the presentation of information to the driver of the vehicle.
- the vehicle control device disclosed in Patent Document 1 includes a congestion determination unit that determines that congestion has occurred, and an automatic operation start determination unit that starts automatic driving when the length of the congestion occurrence section is equal to or greater than a predetermined value. And have.
- Patent Document 1 it is being considered to allow the provision of contents and the like to the driver during the period in which the vehicle automatically travels by the automatic driving function.
- the driver's attention is directed to the content or the like, a scene in which the driver feels uneasy tends to occur. For example, when traveling in a traffic jam, many interruptions of other vehicles occur. If the interruption of another vehicle in such a traffic jam occurs while driving by the automatic driving function, it may cause anxiety of the driver.
- the purpose of the present disclosure is to provide a presentation control device and a presentation control program that are less likely to cause anxiety to the driver when driving in a traffic jam by the automatic driving function.
- one disclosed embodiment is a presentation control device used in a vehicle having an automatic driving function and controlling the presentation of information to the driver of the vehicle, and the vehicle can be driven by the automatic driving function.
- the traffic jam judgment unit that determines whether or not the vehicle is in a traffic jam, and the traffic jam judgment unit determines that the vehicle is in a traffic jam, and the vehicle is interrupted by an adjacent vehicle adjacent to the vehicle.
- An interruption prediction unit that detects an implementation sign and a provision restriction unit that limits the display of content provided during the automatic driving period when an interruption prediction unit by an adjacent vehicle detects an execution sign. It is a presentation control device to be provided.
- one aspect disclosed is a presentation control program used in a vehicle having an automatic driving function and controlling the presentation of information to the driver of the vehicle, and the vehicle is provided with an automatic driving function in at least one processing unit.
- the automatic driving period in which the vehicle is traveling it is determined whether or not the vehicle is in a traffic jam.
- the automatic driving function when driving in a traffic jam by the automatic driving function, if a sign of interruption by an adjacent vehicle is detected, the display of the content provided to the driver is restricted. Therefore, the prediction of the occurrence of an interrupt by an adjacent vehicle is notified to the driver by the display change that occurs in the content being provided. According to these notifications, the automatic driving function makes it less likely to cause anxiety to the driver when driving in a traffic jam.
- one disclosed aspect is a presentation control device used in a vehicle having an automatic driving function and controlling the presentation of information to the driver of the vehicle, during an automatic driving period in which the vehicle travels by the automatic driving function. Therefore, a traffic jam determination unit that determines whether or not there is a specific pattern of traffic congestion that is set as being prone to interruption by an adjacent vehicle adjacent to the own vehicle, and a traffic jam determination unit that determines whether or not the vehicle is in a specific pattern of traffic congestion. It is a presentation control device including a provision restriction unit that strengthens the restriction on the display of the content provided during the automatic traveling period when it is determined to be.
- one aspect disclosed is a presentation control program used in a vehicle having an automatic driving function and controlling the presentation of information to the driver of the vehicle, and the vehicle is provided with an automatic driving function in at least one processing unit.
- the presentation control program is used to execute a process including tightening the restriction on the display of the content provided during the automatic driving period.
- the automatic driving function when the vehicle is driven in a traffic jam by the automatic driving function, if it is determined that the traffic jam has a specific pattern in which an interrupt by an adjacent vehicle is likely to occur, the display of the content provided to the driver is restricted. Therefore, the possibility of an interrupt generated by an adjacent vehicle can be notified to the driver by a display change occurring in the content being provided. According to these notifications, the automatic driving function makes it less likely to cause anxiety to the driver when driving in a traffic jam.
- one disclosed aspect is a presentation control device used in a vehicle having an automatic driving function and controlling the presentation of information to the driver of the vehicle, which is a rear vehicle traveling behind the own vehicle, which is the vehicle.
- a rear grasping unit that grasps the existence of the vehicle
- a congestion judgment unit that determines whether or not the vehicle is in a traffic jam during the automatic driving period in which the vehicle travels by the automatic driving function
- a rear vehicle that is grasped by the rear grasping unit during the traffic jam.
- It is a presentation control device including a provision restriction unit that limits the display of the content provided during the automatic driving period according to the situation of the above.
- one disclosed aspect is a presentation control program used in a vehicle having an automatic driving function and controlling the presentation of information to the driver of the vehicle, and the own vehicle, which is a vehicle, is assigned to at least one processing unit.
- the existence of a vehicle behind the vehicle is grasped, and the automatic driving function determines whether or not the vehicle is in a traffic jam during the automatic driving period in which the vehicle is traveling.
- the automatic driving function when driving in a traffic jam by the automatic driving function, the display of the content provided during the automatic driving period is restricted according to the situation of the vehicle behind the vehicle. Therefore, the risk of a rear-end collision is notified to the driver by the display change that occurs in the content being provided. According to these notifications, the automatic driving function makes it less likely to cause anxiety to the driver when driving in a traffic jam.
- one disclosed aspect is a presentation control device used in a vehicle having an automatic driving function and controlling the presentation of information to the driver of the vehicle, which is a rear vehicle traveling behind the own vehicle, which is the vehicle.
- Congestion that determines whether or not there is a specific pattern of congestion that is set as the risk of collision of the vehicle behind is likely to increase during the automatic driving period in which the vehicle travels by the rear grasping unit that grasps the existence of the vehicle and the automatic driving function.
- It is a presentation control device including a determination unit and a provision restriction unit that strengthens the restriction on the display of the content provided during the automatic traveling period when the congestion determination unit determines that the vehicle is in a specific pattern of congestion.
- one disclosed aspect is a presentation control program used in a vehicle having an automatic driving function and controlling the presentation of information to the driver of the vehicle, and the own vehicle, which is a vehicle, is assigned to at least one processing unit. Whether or not there is a specific pattern of traffic congestion that is set as the risk of collision of the vehicle behind is likely to increase during the automatic driving period in which the vehicle travels by grasping the existence of the vehicle behind the vehicle It is a presentation control program that executes a process including tightening the restriction on the display of the content provided during the automatic driving period when the determination is made and it is determined that the vehicle is in a traffic jam of a specific pattern.
- the automatic driving function when the vehicle is driven in a traffic jam by the automatic driving function, if it is determined that the traffic jam has a specific pattern in which the risk of a rear-end collision is likely to increase, the display of the content provided to the driver is restricted. Therefore, the rear-end collision risk of the vehicle behind can be notified to the driver by the display change that occurs in the content being provided. According to these notifications, the automatic driving function makes it less likely to cause anxiety to the driver when driving in a traffic jam.
- one disclosed aspect is a presentation control device used in a vehicle having an automatic driving function and controlling the presentation of information to the driver of the vehicle, during an automatic driving period in which the vehicle travels by the automatic driving function.
- the traffic jam determination unit determines whether or not the vehicle is in a traffic jam, and further determines whether or not the vehicle is in a specific pattern of traffic jam, which is set as being prone to interruption by an adjacent vehicle adjacent to the own vehicle.
- Provision restriction unit that sets a wider permissible range of specific actions other than driving permitted to the driver during the automatic driving period when there is a traffic jam of a non-specific pattern other than the specific pattern.
- the presentation control device is used in a vehicle having an automatic driving function and controlling the presentation of information to the driver of the vehicle, during an automatic driving period in which the vehicle travels by the automatic driving function.
- one disclosed aspect is a presentation control program used in a vehicle having an automatic driving function and controlling the presentation of information to the driver of the vehicle, and the vehicle is provided with an automatic driving function in at least one processing unit.
- the automatic driving period in which the vehicle travels it is determined whether or not there is a specific pattern of traffic congestion set as being prone to interruption by an adjacent vehicle adjacent to the own vehicle, which is a vehicle, and a non-specific pattern other than the specific pattern.
- Presentation control to execute processing including setting a wider permissible range of specific actions other than driving permitted to the driver in the automatic driving period than in the case of traffic jam of a specific pattern. It is a program.
- the automatic driving function when the vehicle is driven in a traffic jam by the automatic driving function, if it is determined that the traffic jam has a specific pattern in which an interrupt by an adjacent vehicle is likely to occur, the permissible range of the specific action permitted to the driver is narrowed. Therefore, when there is a possibility that an interrupt may occur due to an adjacent vehicle, a specific act that tends to cause anxiety may be disallowed due to a change in the allowable range. As a result, the automatic driving function makes it difficult for the driver to feel uneasy when driving in a traffic jam.
- one disclosed aspect is a presentation control device used in a vehicle having an automatic driving function and controlling the presentation of information to the driver of the vehicle, which is a rear vehicle traveling behind the own vehicle, which is a vehicle.
- a rear grasping unit that grasps the existence of the vehicle
- a congestion judgment unit that determines whether or not the vehicle is in a traffic jam during the automatic driving period in which the vehicle travels by the automatic driving function
- a rear vehicle that is grasped by the rear grasping unit during the traffic jam.
- It is a presentation control device provided with a provision restriction unit that changes the permissible range of specific actions other than driving permitted to the driver during the automatic driving period according to the situation of the above.
- one disclosed aspect is a presentation control program used in a vehicle having an automatic driving function and controlling the presentation of information to the driver of the vehicle, and the own vehicle, which is a vehicle, is assigned to at least one processing unit. Understand the existence of a vehicle behind the vehicle and use the automatic driving function to identify specific actions other than driving permitted by the driver, depending on the situation of the vehicle behind the vehicle during the automatic driving period when the vehicle is traveling in a traffic jam. It is a presentation control program that executes processing including changing the permissible range of.
- the permissible range of specific actions permitted to the driver is changed according to the situation of the vehicle behind the vehicle. Therefore, when there is a risk of a rear-end collision, a specific act that tends to cause anxiety may be disallowed due to a change in the permissible range. As a result, the automatic driving function makes it difficult for the driver to feel uneasy when driving in a traffic jam.
- the HCU 100 Human Machine Interface Control Unit 100 shown in FIG.
- the HCU 100 comprises an HMI (Human Machine Interface) system used in a vehicle Am together with a plurality of display devices, an audio device 24, an operation device 26, and the like.
- the HMI system has an input interface function that accepts operations by an occupant (for example, a driver) of the vehicle Am, and an output interface function that presents information to the driver.
- the HCU 100 is communicably connected to the communication bus 99 of the vehicle-mounted network 1 mounted on the vehicle Am.
- the HCU 100 is one of a plurality of nodes provided in the vehicle-mounted network 1.
- a driver monitor 29, a peripheral monitoring sensor 30, a locator 35, a navigation (Electronic Control Unit) ECU 38, a travel control ECU 40, a driving support ECU 50a, an automatic driving ECU 50b, and the like are connected to the communication bus 99.
- These nodes connected to the communication bus 99 of the vehicle-mounted network 1 can communicate with each other. Specific nodes of these devices and ECUs may be directly electrically connected to each other and can communicate with each other without going through the communication bus 99.
- the driver monitor 29 has a configuration including a near-infrared light source, a near-infrared camera, and a control unit for controlling them.
- the driver monitor 29 is installed in a posture in which the near-infrared camera is directed toward the headrest portion of the driver's seat, for example, on the upper surface of the steering column portion or the upper surface of the instrument panel 9.
- the near-infrared camera may be integrally configured with the meter display 21 or the center information display (hereinafter, CID) 22 described later, and may be provided on either screen.
- the driver monitor 29 uses a near-infrared camera to photograph the head of the driver irradiated with near-infrared light by a near-infrared light source.
- the image captured by the near-infrared camera is image-analyzed by the control unit.
- the control unit extracts information such as the position of the driver's eye point and the line-of-sight direction from the captured image, and provides the extracted driver state information to the HCU 100 and the like via the communication bus 99.
- the peripheral monitoring sensor 30 is an autonomous sensor that monitors the surrounding environment of the vehicle Am.
- the peripheral monitoring sensor 30 can detect a predetermined moving object and a stationary object from the detection range around the own vehicle.
- the peripheral monitoring sensor 30 can at least detect a front vehicle (see FIG. 4 front vehicle Af), a rear vehicle, front and rear side vehicles (see FIG. 4 adjacent vehicle Ad), and the like traveling around the own vehicle.
- the peripheral monitoring sensor 30 provides detection information of an object around the vehicle to the driving support ECU 50a, the automatic driving ECU 50b, and the like through the communication bus 99.
- the peripheral monitoring sensor 30 includes, for example, a camera unit 31 and a millimeter wave radar 32.
- the camera unit 31 may be configured to include a monocular camera, or may be configured to include a compound eye camera.
- the camera unit 31 is mounted on the vehicle Am so that the front range, the side range, the rear range, and the like of the vehicle Am can be photographed.
- the camera unit 31 outputs at least one of the imaging data obtained by photographing the surroundings of the vehicle and the analysis result of the imaging data as detection information.
- the millimeter wave radar 32 irradiates a millimeter wave or a quasi-millimeter wave toward the surroundings of the own vehicle.
- the millimeter wave radar 32 outputs the detection information generated by the process of receiving the reflected wave reflected by a moving object, a stationary object, or the like.
- the peripheral monitoring sensor 30 may further include a detection configuration such as a rider and a sonar.
- the locator 35 has a configuration including a GNSS (Global Navigation Satellite System) receiver, an inertial sensor, and the like.
- the locator 35 combines the positioning signal received by the GNSS receiver, the measurement result of the inertial sensor, the vehicle speed information output to the communication bus 99, and the like, and sequentially positions the own vehicle position and the traveling direction of the vehicle Am.
- the locator 35 sequentially outputs the position information and the direction information of the vehicle Am based on the positioning result to the communication bus 99 as the locator information.
- GNSS Global Navigation Satellite System
- the locator 35 further has a map database 36.
- the map database 36 is mainly composed of a large-capacity storage medium that stores a large number of three-dimensional map data and two-dimensional map data.
- the three-dimensional map data is so-called high-precision map data, and includes information necessary for advanced driving support and automatic driving, such as three-dimensional shape information of roads and detailed information of each lane.
- the locator 35 reads the map data around the current position from the map database 36 and provides the map data to the driving support ECU 50a, the automatic driving ECU 50b, and the like together with the locator information.
- the navigation ECU 38 grasps the current position of the vehicle Am based on the locator information acquired from the locator 35.
- the navigation ECU 38 sets a route from the current position to the destination set by the driver or the like.
- the navigation ECU 38 provides the HCU 100 with route information indicating a set route to the destination.
- the navigation ECU 38 cooperates with the HMI system, combines a screen display and a voice message as route guidance to the destination, and notifies the driver of the traveling direction of the vehicle Am at an intersection, a branch point, or the like.
- a user terminal such as a smartphone may be connected to the in-vehicle network 1 or the HCU 100.
- a user terminal may provide position information, direction information, map data, and the like to the driving support ECU 50a and the automatic driving ECU 50b instead of the locator 35.
- the user terminal may provide the HCU 100 with route information to the destination instead of the navigation ECU 38.
- the application executed on the user terminal is set with a route to the destination based on a user operation such as a driver.
- the user terminal can guide the traveling direction of the vehicle Am at an intersection, a branch point, or the like by combining a screen display, a voice message, or the like.
- the user terminal can provide the HCU 100 with route information to the destination set by the application.
- the travel control ECU 40 is an electronic control device that mainly includes a microcontroller.
- the travel control ECU 40 has at least the functions of a brake control ECU, a drive control ECU, and a steering control ECU.
- the travel control ECU 40 controls the braking force of each wheel, controls the output of the in-vehicle power source, and steers based on any one of an operation command based on the driver's driving operation, a control command of the driving support ECU 50a, and a control command of the automatic driving ECU 50b.
- Angle control is continuously performed.
- the travel control ECU 40 generates vehicle speed information indicating the current travel speed of the vehicle Am based on the detection signal of the wheel speed sensor 41 provided in the hub portion of each wheel, and sequentially outputs the vehicle speed information to the communication bus 99.
- the driving support ECU 50a and the automatic driving ECU 50b are mounted on the vehicle Am as an in-vehicle ECU constituting the automatic driving system 50.
- the vehicle Am becomes an automatic driving vehicle having an automatic driving function.
- the driving support ECU 50a is an in-vehicle ECU that realizes a driving support function that supports the driving operation of the driver.
- the driving support ECU 50a enables advanced driving support of about level 2 or partial automatic driving control at the automatic driving level specified by the American Society of Automotive Engineers of Japan.
- the operation support ECU 50a is a computer mainly including a control circuit including a processing unit, a RAM, a storage unit, an input / output interface, a bus connecting them, and the like.
- the driving support ECU 50a has a plurality of functional units that realize advanced driving support by executing a program by the processing unit. Specifically, the driving support ECU 50a has an ACC (Adaptive Cruise Control) function unit, an LTA (Lane Tracing Assist) function unit, and an LCA (Lane Change Assist) function unit.
- ACC Adaptive Cruise Control
- LTA Longe Tracing Assist
- LCA Lane Change Assist
- the automatic driving ECU 50b is an in-vehicle ECU that realizes an automatic driving function capable of acting as a driver's driving operation.
- the automatic driving ECU 50b enables autonomous driving of level 3 or higher in which the system is the main control body only in the preset operation design domain (Operational Design Domain, ODD).
- the autonomous driving control by the automatic driving ECU 50b is compatible with the laws and regulations of the country or region where the vehicle Am is used, and enables the automatic driving of eyes-off that does not require the driver to visually monitor the surroundings of the vehicle.
- the automatic driving ECU 50b has an area-limited level 3 automatic driving that allows level 3 automatic driving within a specific automatic driving area, and a level 3 level 3 that allows level 3 automatic driving when driving in a traffic jam. It is possible to carry out automatic operation of.
- the automatic operation ECU 50b may be capable of realizing an automatic operation function of level 4 or higher.
- the automatic operation ECU 50b is a computer mainly including a control circuit including a processing unit 51, a RAM 52, a storage unit 53, an input / output interface 54, and a bus connecting them.
- the automatic driving ECU 50b has a higher computing power than the driving support ECU 50a, and can at least perform traveling control corresponding to ACC, LTA, and LCA.
- the automatic driving ECU 50b has an environment recognition unit 61, an action determination unit 62, and an operation execution unit 63 as a plurality of functional units that realize automatic driving of the vehicle Am by executing a program by the processing unit 51.
- the environment recognition unit 61 recognizes the traveling environment of the vehicle Am based on the locator information and the map data acquired from the locator 35 and the detection information acquired from the peripheral monitoring sensor 30. Specifically, the environment recognition unit 61 grasps the position of the own vehicle lane in which the own vehicle travels among the plurality of lanes, the lane shape of the own vehicle lane, the relative position and the relative speed of other vehicles around the own vehicle, and the like. .. The position of the own vehicle lane may be specified by the locator 35. Further, the recognition result of the traveling environment by the environment recognition unit 61 is provided to the HCU 100 as recognition information.
- the action judgment unit 62 generates a planned driving line on which the vehicle Am is driven based on the recognition result of the driving environment by the environment recognition unit 61.
- the action determination unit 62 sequentially generates the optimum scheduled traveling line for heading to the destination based on the route information generated by the navigation ECU 38. For example, when the branch point that departs from the main lane is on the set route, the action judgment unit 62 makes a scheduled run such as changing the lane toward the branch destination lane on the route (hereinafter, route lane Lnr, see FIG. 7). Generate a line.
- the operation execution unit 63 executes acceleration / deceleration control and steering control of the vehicle Am according to the scheduled travel line generated by the action determination unit 62 in cooperation with the travel control ECU 40. Specifically, the operation execution unit 63 generates a control command based on the scheduled travel line and sequentially outputs the control command to the travel control ECU 40.
- the plurality of display devices include a meter display 21, a CID 22, a head-up display (hereinafter, HUD) 23, and the like.
- the plurality of display devices may further include each display EMB, EML, EMR of the electronic mirror system (see FIG. 2).
- the meter display 21, CID22 and HUD23 present information through the driver's vision.
- the meter display 21 and the CID 22 are mainly composed of, for example, a liquid crystal display or an OLED (Organic Light Emitting Diode) display.
- the meter display 21 and the CID 22 display various images on the display screen based on the control signal and the video data acquired from the HCU 100.
- the meter display 21 is installed, for example, in front of the driver's seat.
- the CID 22 is installed in the central portion of the instrument panel 9.
- the CID 22 is a vertically long display of 10 inches or more.
- the display screen of the CID 22 may be curved in a curved surface. Further, the display screen of the CID 22 may be continuous with the display screen of the meter display 21.
- the CID 22 has a touch panel function, and detects, for example, a touch operation on the display screen by a driver or the like, specifically, an operation such as tapping, flicking, pinching, and swiping.
- the HUD 23 Based on the control signal and video data acquired from the HCU 100, the HUD 23 projects the light of the image formed in front of the driver onto the projection area PA defined by the windshield WS or the like. The light of the image reflected on the vehicle interior side by the windshield WS is perceived by the driver sitting in the driver's seat. In this way, the HUD 23 displays a virtual image in the space in front of the projection area PA. The driver visually recognizes the virtual image in the angle of view VA displayed by the HUD23 on top of the foreground of the vehicle Am.
- the audio device 24 has a plurality of speakers installed in the vehicle interior in an arrangement surrounding the driver's seat.
- the audio device 24 reproduces a notification sound, a voice message, or the like in the vehicle interior by a speaker based on the control signal and voice data acquired from the HCU 100.
- the audio device 24 presents information through the driver's hearing.
- the operation device 26 is an input unit that accepts user operations by a driver or the like. For example, user operations related to the operation and stop of the automatic driving function are input to the operation device 26.
- the operation device 26 includes a steering switch provided on the spoke portion of the steering wheel, an operation lever provided on the steering column portion, a voice input device for recognizing the utterance content of the driver, and the like.
- the HCU 100 is an in-vehicle computer that controls the meter display 21, the CID 22, the HUD 23, and the audio device 24 in the HMI system.
- the HCU 100 functions as a presentation control device that integrally manages information presentation to the driver.
- the HCU 100 mainly includes a control circuit including a processing unit 11, a RAM 12, a storage unit 13, an input / output interface 14, and a bus connecting them.
- the processing unit 11 is hardware for arithmetic processing combined with the RAM 12.
- the processing unit 11 has a configuration including at least one arithmetic core such as a CPU (Central Processing Unit) and a GPU (Graphics Processing Unit).
- the processing unit 11 may further include an FPGA (Field-Programmable Gate Array), an NPU (Neural network Processing Unit), an IP core having other dedicated functions, and the like.
- the RAM 12 may be configured to include a video RAM for generating video data.
- the processing unit 11 executes various processes for realizing the presentation control method of the present disclosure by accessing the RAM 12.
- the storage unit 13 is configured to include a non-volatile storage medium.
- the storage unit 13 stores various programs (presentation control programs, etc.) executed by the processing unit 11.
- the HCU 100 has a plurality of functional units that integrally control the presentation of information to the driver using each display device and the audio device 24 by executing the presentation control program stored in the storage unit 13 by the processing unit 11.
- the HCU 100 is constructed with functional units such as an information acquisition unit 71 and a provision control unit 77.
- the information acquisition unit 71 acquires vehicle information indicating the state of the vehicle Am from the communication bus 99.
- vehicle information includes, for example, vehicle speed information, status information indicating the state of the automatic driving function, and recognition information in which the environment recognition unit 61 recognizes the traveling environment around the vehicle.
- the information acquisition unit 71 acquires operation information indicating the content of the user operation from the CID 22, the operation device 26, and the like.
- the information acquisition unit 71 acquires the driver status information from the driver monitor 29.
- the information acquisition unit 71 acquires locator information, map data, route information, etc. necessary for generating the navigation map MP (see FIG. 9 and the like).
- the video data of the navigation map MP may be generated by the navigation ECU 38 at a predetermined resolution and provided to the information acquisition unit 71.
- the information acquisition unit 71 acquires content data (video files, etc.) necessary for entertainment-related display, such as video content CTV (see FIG. 9 and the like).
- the content data is provided to the information acquisition unit 71 by a TV tuner mounted on the vehicle Am, an external medium electrically connected to the HCU 100, and a user terminal such as a smartphone paired with the HCU 100.
- the provision control unit 77 integratedly controls the provision of information to the driver using each display device and the audio device 24.
- the provision control unit 77 can change the display size and display layout of each content to be displayed on each display device according to the priority set for each content. As an example, the provision control unit 77 increases the display size of the content having a higher priority, or displays the content on the front side of the screen in appearance.
- the provision control unit 77 has an arbitration function for arbitrating the information presented to the driver and a data generation function for generating video data and audio data based on the arbitration result.
- the provision control unit 77 sets the above-mentioned priority for each content as a provision candidate based on various acquisition information acquired by the information acquisition unit 71.
- the provision control unit 77 selects the content determined to have a high priority as the content to be provided to the driver.
- the provision control unit 77 generates control signals and video data to be provided to each display device and control signals and audio data to be provided to the audio device 24 based on the content selection result.
- the providing control unit 77 sequentially outputs the generated control signal, video data, audio data, and the like to each presentation device.
- the driver is an act other than driving and is a predetermined specific action (hereinafter referred to as a second task). ) Can be allowed.
- the driver in this case is a person (passenger) who takes over the control right of driving from the automatic driving system 50 when leaving the limited area or in an emergency.
- the driver may be legally permitted to perform a second task until a request for execution of a driving operation by the automatic driving system 50, that is, a request for a driving change (Take Over Request) is generated.
- the second task can be called a secondary activity or another activity.
- the second task must not prevent the driver from responding to the request to take over the driving operation from the automatic driving system 50. For example, viewing entertainment content such as video content CTV (see FIG. 9), operating a smartphone, and eating are assumed as second tasks.
- the driver When the driver is performing the second task, the driver's attention is away from the driving operation. Therefore, during the execution of the second task, the driver tends to be anxious about the behavior change in the automatic driving by the automatic driving ECU 50b.
- the vehicle Am when the vehicle Am is traveling in a traffic jam, many interruptions of other vehicles occur depending on the traffic jam situation. In such a scene, even if the automatic driving function is operating normally, the driver may feel anxious about the behavior change of the vehicle Am corresponding to the interruption of another vehicle.
- the HCU 100 a plurality of functional units that manage the execution of the driver's second task during automatic driving in a congested section are further constructed based on the presentation control program.
- the HCU 100 further includes a traffic jam determination unit 72, an interrupt prediction unit 73, an interrupt determination unit 74, and an integrated state estimation unit 75.
- the traffic jam determination unit 72 determines whether or not the vehicle is in a traffic jam during the automatic driving period in which the vehicle Am travels by the automatic driving function.
- the vehicle Am (hereinafter, also referred to as own vehicle) is involved in the traffic jam based on the vehicle speed information, map data, route information, recognition information around the vehicle, etc. acquired by the information acquisition unit 71. Determine if it is in a state.
- the traffic jam determination unit 72 determines that the traveling speed of the own vehicle is equal to or less than a predetermined congestion determination threshold value (for example, 10 km / h) and the preceding vehicle Af is present in front of the own vehicle. Judge that the vehicle is in a traffic jam.
- a predetermined congestion determination threshold value for example, 10 km / h
- the preceding vehicle Af is another vehicle in front of the vehicle that the vehicle follows while ensuring a common-sense inter-vehicle distance (for example, about several meters to a dozen meters) during traffic jams.
- the traffic jam determination unit 72 determines that the traffic jam has been resolved when the traveling speed of the own vehicle exceeds a predetermined congestion elimination threshold value (for example, 50 km / h).
- the congestion determination unit 72 further determines the congestion pattern around the own vehicle when it is determined that the surroundings of the own vehicle are congested.
- the traffic jam determination unit 72 identifies a traffic jam pattern to which the current traffic jam around the vehicle is applicable among the preset traffic jam patterns A to D (see FIGS. 4 to 7).
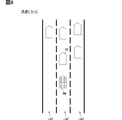
- Congestion pattern A shown in FIG. 4 is based on the premise that the vehicle is traveling in the central lane Ln2 on a road including three or more lanes.
- the central lane Ln2 is a lane excluding the rightmost lane Ln3 and the leftmost lane Ln1.
- a plurality of central lanes Ln2 may exist on the road.
- the traffic jam pattern A is a traffic jam pattern in which other vehicles exist in front of the own vehicle traveling on the central lane Ln2 and on both the left and right sides.
- the traffic jam determination unit 72 determines that the traffic jam is pattern A when the traveling speed of the own vehicle is equal to or less than the traffic jam determination threshold value and all the preceding vehicle Af and the left and right adjacent vehicles Ad are detected.
- the detection range for determining the presence or absence of the adjacent vehicle Ad may include not only the side of the own vehicle but also the front side and the rear side of the own vehicle slightly (for example, about 5 m). Further, the detection range of the adjacent vehicle Ad may be constant or may be adjusted according to the traveling speed.
- the congestion pattern B shown in FIG. 5 is based on the premise that the vehicle is traveling in the rightmost lane Ln3 or the leftmost lane Ln1 on a road including a plurality of lanes.
- the traffic jam pattern B is a traffic jam pattern in which the preceding vehicle Af exists in front of the own vehicle and the adjacent vehicle Ad exists in the adjacent central lane Ln2.
- the traffic jam determination unit 72 determines that the traffic jam is pattern B when the traveling speed of the own vehicle is equal to or less than the traffic jam determination threshold value and both the preceding vehicle Af and the adjacent vehicle Ad are detected.
- the congestion pattern C shown in FIG. 6 is a congestion pattern in which only the own vehicle lane in which the own vehicle travels is congested among the plurality of lanes.
- the traffic jam determination unit 72 determines that the traffic jam is pattern C when the traveling speed of the own vehicle is equal to or less than the traffic jam determination threshold value, the preceding vehicle Af is detected, and the adjacent vehicle Ad is not detected. do.
- the congestion pattern D shown in FIG. 7 is a congestion pattern in which only the route lane Lnr (see the dot range) specified based on the route information is congested.
- the traffic jam determination unit 72 is a traffic jam of pattern D when the traveling speed of the own vehicle is equal to or less than the congestion determination threshold value and the preceding vehicle Af is detected in front of the own vehicle traveling on the route lane Lnr. Is determined.
- the details of the traffic jam determination process performed by the traffic jam determination unit 72 will be described below with reference to FIGS. 4 to 7 based on FIG.
- the traffic jam determination unit 72 starts the traffic jam determination process based on the acquisition of status information indicating the start of automatic driving by the automatic driving ECU 50b.
- the traffic jam determination unit 72 repeatedly starts the traffic jam determination process at a predetermined cycle until the automatic traveling by the automatic driving ECU 50b is completed.
- S101 it is determined whether or not the traveling speed of the own vehicle is equal to or less than the congestion determination threshold value based on the latest vehicle speed information. If it is determined in S101 that the traveling speed exceeds the congestion determination threshold value, the process proceeds to S102. In S102, it is determined that the surroundings of the own vehicle are not in a traffic jam (non-traffic jam determination), and the current traffic jam determination process is completed.
- the process proceeds to S103.
- S103 it is determined whether or not there is a preceding vehicle Af traveling in front of the own vehicle. If it is determined in S103 that the preceding vehicle Af is not detected, the process proceeds to S102 and a non-congestion determination is performed. On the other hand, if it is determined in S103 that the preceding vehicle Af is detected, the process proceeds to S104.
- S104 the presence or absence of the adjacent vehicle Ad is determined. If it is determined in S104 that the adjacent vehicle Ad is detected in all of the adjacent lanes, the process proceeds to S105. In S105, it is determined that the surroundings of the own vehicle are congested (congestion determination), the congestion pattern is determined, and the process proceeds to S109. In S105, it is determined that the vehicle has a traffic jam pattern A or a traffic jam pattern B according to the position of the own vehicle lane.
- the process proceeds to S106.
- S106 it is determined whether or not the own vehicle lane is the route lane Lnr based on the route information. If it is determined in S106 that the traveling own vehicle lane is not the route lane Lnr, the process proceeds to S107. In S107, the congestion of the own vehicle lane is determined, and it is determined that the congestion pattern C is in the congestion, and the process proceeds to S109.
- S106 when the own vehicle lane is the route lane Lnr and it is determined that the route lane Lnr is congested, the process proceeds to S108.
- S108 the traffic jam of the route lane Lnr is determined, and it is determined that the traffic jam is in the traffic jam pattern D, and the process proceeds to S109.
- S109 it is determined whether or not the traveling speed of the own vehicle exceeds the congestion elimination threshold value based on the latest vehicle speed information. If it is determined in S109 that the traveling speed is equal to or less than the congestion elimination threshold value, the process returns to S104. On the other hand, if it is determined in S109 that the traveling speed exceeds the congestion elimination threshold value, the current congestion determination process is terminated.
- the interrupt prediction unit 73 shown in FIG. 3 predicts the occurrence of an interrupt by detecting an execution sign of an interrupt in front of the own vehicle by the adjacent vehicle Ad.
- the direction indicator (winker) on the own vehicle lane side of the adjacent vehicle Ad blinks based on the analysis result of the recognition information of the environment recognition unit 61 or the imaging data of the camera unit 31. Judge whether or not.
- the interruption prediction unit 73 detects the operation of this direction indicator as a sign of interruption.
- the interrupt prediction unit 73 may acquire detection information of another vehicle in the adjacent lane by the blind spot monitor. In this case, the approach of the adjacent vehicle Ad, which has a speed difference from the own vehicle, is detected as a sign of interruption to the front of the own vehicle.
- the interrupt prediction unit 73 may detect the lateral movement of the adjacent vehicle Ad, which is offset in the lane toward the lane marking between the adjacent lane and the own vehicle lane, as a sign of interruption. Further, when the adjacent vehicle Ad is equipped with the automatic driving function, the interrupt prediction unit 73 may acquire the planned traveling line of the adjacent vehicle Ad by vehicle-to-vehicle communication with the adjacent vehicle Ad. In this case, the interrupt prediction unit 73 can detect the sign of interruption from the planned travel line of the adjacent vehicle Ad, which is scheduled to change lanes to the own vehicle lane.
- the interruption determination unit 74 determines whether or not the interrupt to the front of the own vehicle by the adjacent vehicle Ad is actually executed. As an example, the interrupt determination unit 74 determines whether or not the adjacent vehicle Ad has entered the own vehicle lane based on the recognition result by the environment recognition unit 61 or the analysis result of the imaging data of the camera unit 31. When at least a part of the adjacent vehicle Ad enters the own vehicle lane beyond the lane marking between the adjacent vehicle lane and the own vehicle lane, the interruption determination unit 74 determines that the interrupt of the adjacent vehicle Ad is executed. .. In addition, the interruption determination unit 74 may determine that the adjacent vehicle Ad is interrupting when the lateral movement speed of the adjacent vehicle Ad toward the own vehicle lane exceeds a predetermined speed.
- a part or all of the traffic jam determination process by the traffic jam determination unit 72, the interrupt prediction process based on the sign detection by the interrupt prediction unit 73, and the determination process during interrupt execution by the interrupt determination unit 74 are all automatic driving systems. It may be carried out by 50.
- the traffic jam determination unit 72, the interrupt prediction unit 73, and the interrupt determination unit 74 cooperate with the information acquisition unit 71 to acquire information indicating the processing result of the automatic driving system 50. That is, the traffic jam determination unit 72 determines whether or not the vehicle is in a traffic jam based on the information acquired from the automatic driving system 50 during the automatic driving period.
- the interrupt prediction unit 73 detects an interruption sign by the adjacent vehicle Ad based on the information acquired from the automatic driving system 50.
- the interrupt determination unit 74 determines whether or not the interrupt by the adjacent vehicle Ad is executed based on the information acquired from the automatic driving system 50.
- the integrated state estimation unit 75 acquires the driver state information generated by the driver monitor 29 from the information acquisition unit 71.
- the integrated state estimation unit 75 determines the type of the second task performed by the driver at least during the automatic driving period. Specifically, the integrated state estimation unit 75 identifies the second task currently being executed by the driver among the plurality of types of second tasks assumed in advance.
- the integrated state estimation unit 75 refers to the content reproduction information by the provision control unit 77, the operation information transmitted from the smartphone or the like, and selects the second task being executed in combination with the state information of the driver monitor 29.
- the integrated state estimation unit 75 may be able to estimate the second task to be performed by the driver from the image captured by the near-infrared camera by using, for example, a determination device (determination logic) generated by machine learning or the like.
- the process of specifying the second task to be executed by the driver may be executed by the driver monitor 29.
- the integrated state estimation unit 75 acquires the information indicating the type of the second task generated by the driver monitor 29 through the communication bus 99 and the information acquisition unit 71.
- the provision control unit 77 provides a method of providing video content CTV (see FIG. 9) or the like provided in connection with the second task during the automatic driving period in which the execution of the second task is permitted, depending on the driving environment of the own vehicle. To control.
- the provision control unit 77 restricts the provision of entertainment content or the like by the CID 22 according to the traffic jam pattern and the behavior of the adjacent vehicle Ad. do.
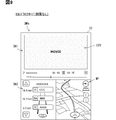
- the provision control unit 77 displays the video of the second task mode including the entertainment content such as the video content CTV on the screen of the CID 22 during the automatic driving period in which the execution of the second task is permitted.
- the display of the second task mode includes the moving image content CTV and the navigation map MP.
- the screen of the CID 22 is divided into two upper and lower screen areas.
- the moving image content CTV is displayed in the upper screen area (hereinafter, main display area DA1) so that the driver can easily see it.
- the navigation map MP is displayed in the lower screen area (hereinafter, sub display area DA2).
- the display object displayed together with the video content CTV and the like may be changed as appropriate. Further, in the second task mode, the moving image content CTV may be displayed on the entire screen of the CID 22. Further, the content displayed in the second task mode may be preset by a driver or the like.
- the provision control unit 77 limits the display of the video content CTV by switching the second task mode among a plurality of the second task modes based on the information provided by the congestion determination unit 72, the interrupt prediction unit 73, and the interrupt determination unit 74.
- the second task mode DMn shown in FIG. 9 is a display mode when the display of the moving image content CTV is not restricted. In the second task mode DMn without such restrictions, the moving image content CTV is normally displayed in the main display area DA1.
- restrictions are applied to the display of entertainment-related contents such as moving image contents CTV.
- the second task mode DMr1 shown in FIG. 10 is a display mode when a weak restriction is applied to the display of the moving image content CTV.
- the provision control unit 77 refers to the determination result of the congestion pattern by the congestion determination unit 72, and determines whether or not the vehicle is in a specific pattern of congestion.
- the traffic jam pattern C and the traffic jam pattern D a forcible interruption of the adjacent vehicle Ad who wants to move to the own vehicle lane is likely to occur. Therefore, the traffic jam pattern C and the traffic jam pattern D are registered in the provision control unit 77 as a specific pattern of traffic jam in which an interruption to the front of the own vehicle is likely to occur.
- the provision control unit 77 determines that the vehicle is in a specific pattern of congestion, and sets the second task mode DMr1.
- the interrupt possibility notification MWi is displayed in the main display area DA1.
- the interrupt possibility notification MWi is a display object including a warning message such as "Be careful of interrupts in the forward direction".
- the interrupt possibility notification MWi is displayed in a horizontally long band near the upper edge of the main display area DA1.
- the interrupt possibility notification MWi is superimposed on a part of the video content CTV in the main display area DA1. Therefore, most of the video content CTV is displayed without being hidden by the interrupt possibility notification MWi.
- the interrupt possibility notification MWi is displayed, the playback of the video and audio of the video content CTV is continued. Therefore, the viewing of the moving image content CTV by the driver can be continued without being substantially hindered by the additional display of the interrupt possibility notification MWi.
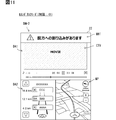
- the second task mode DMr2 shown in FIG. 11 is a display mode when the display of the moving image content CTV is moderately restricted.
- the provision control unit 77 refers to the detection result of the interrupt execution sign by the interrupt prediction unit 73, and sets the display mode of the CID 22 to the second task mode DMr2 when the interrupt execution sign is detected.
- the restriction on the display of the moving image content CTV is stronger than in the second task mode DMr1.
- the provision control unit 77 determines that the traffic jam determination unit 72 is in a specific pattern of traffic jam, rather than the video content. Limit the display of CTV.
- the interrupt prediction notification MWf is displayed in the main display area DA1.
- the interrupt prediction notification MWf is a display object including a warning message such as "There is an interrupt forward".
- the alert by the interrupt prediction notification MWf is stronger than the alert by the interrupt possibility notification MWi (see FIG. 10), and makes the driver aware that the possibility of interrupt generation is increasing.
- the interrupt prediction notification MWf is displayed in a horizontally long band near the upper edge of the main display area DA1 so as to overlap a part of the video content CTV.
- the vertical width of the interrupt prediction notification MWf is wider than the vertical width of the interrupt possibility notification MWi. Therefore, the display area of the moving image content CTV in the second task mode DMr2 is smaller than the display area of the moving image content CTV in the second task mode DMr1 (see FIG. 10).
- the display restriction of the moving image content CTV is strengthened by reducing the display area.
- most of the moving image content CTV is visible to the driver even if it is hidden by the interrupt prediction notification MWf.
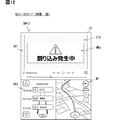
- the second task mode DMr3 shown in FIG. 12 is a display mode when a strong restriction is applied to the display of the moving image content CTV.
- the provision control unit 77 refers to the determination result of interrupt execution by the interrupt determination unit 74, and sets the second task mode DMr3 when the adjacent vehicle Ad is executing the interrupt.
- the display restriction of the moving image content CTV is stronger than in the second task modes DMr1 and DMr2.
- the provision control unit 77 detects an interrupt execution sign in the interrupt prediction unit 73. Rather, the display of the moving image content CTV is restricted.
- the provision control unit 77 determines that the congestion determination unit 72 is in a specific pattern of congestion. Also limits the display of video content CTV.
- the interrupt occurrence notification MWa is displayed in the main display area DA1.
- the interrupt occurrence notification MWa is a display object including a warning message such as "interrupt is occurring".
- the warning by the interrupt occurrence notification MWa is stronger than the warning by the interrupt possibility notification MWi (see FIG. 10) and the interrupt prediction notification MWf (see FIG. 11).
- the interrupt occurrence notification MWa is displayed in the center of the main display area DA1 so as to overlap with the video content CTV.
- the interrupt occurrence notification MWa has a horizontally long rectangular shape like the moving image content CTV.
- the display area of the interrupt occurrence notification MWa is wider than the display areas of the interrupt possibility notification MWi and the interrupt prediction notification MWf.
- the interrupt occurrence notification MWa is superimposed on the center of the video content CTV and covers most of the video content CTV.
- the interrupt occurrence notification MWa is displayed, the reproduction of the video and audio of the moving image content CTV is interrupted.
- the strengthening of the display restriction of the moving image content CTV is realized by reducing the display area and interrupting the reproduction.
- the viewing of the moving image content CTV by the driver is forcibly terminated at the discretion of the system side.
- the provision control unit 77 starts the content control process based on the user operation for instructing the start of reproduction of the moving image content CTV or the like or the acquisition of the status information indicating the start of automatic driving by the automatic driving ECU 50b.
- the CID 22 is set to the second task mode DMn (see FIG. 9) in which there is no restriction on the display of the moving image content CTV, and the process proceeds to S122.
- S122 it is determined whether or not the surroundings of the own vehicle are congested by referring to the result of the congestion determination of the congestion determination unit 72. If it is determined in S122 that the traffic is not congested, the process returns to S121 and the second task mode DMn without limitation is continued. On the other hand, if it is determined in S122 that the traffic is congested, the process proceeds to S123.
- S123 the determination result by the interruption determination unit 74 is referred to, and it is determined whether or not the adjacent vehicle Ad is executing an interrupt toward the front of the own vehicle. If it is determined in S123 that the adjacent vehicle Ad is interrupting, the process proceeds to S130. In S130, the second task mode DMr3 (see FIG. 12) in which the display of the moving image content CTV is strongly restricted is set, and the process proceeds to S131. According to S130, the interrupt occurrence notification MWa is overlaid on the moving image content CTV. On the other hand, if it is determined in S123 that the adjacent vehicle Ad is not interrupting, the process proceeds to S124.
- S124 the determination result by the interrupt prediction unit 73 is referred to, and it is determined whether or not the execution sign of the interrupt by the adjacent vehicle Ad is detected, that is, whether or not the interrupt is predicted. If it is determined in S124 that there is no interrupt prediction for the adjacent vehicle Ad, the process proceeds to S125. In S125, the second task mode DMn (see FIG. 9) without limitation is set, and the process proceeds to S131. On the other hand, if it is determined in S124 that there is an interrupt prediction for the adjacent vehicle Ad, the process proceeds to S126.
- the congestion pattern determination result by the congestion determination unit 72 is referred to, and it is determined whether or not the own vehicle is in a specific pattern of congestion. If it is determined in S126 that the vehicle is in a traffic jam other than the specific pattern (hereinafter, non-specific pattern), that is, if the determination result indicates the traffic jam pattern A or the traffic jam pattern B, the process proceeds to S128.
- the second task mode DMr1 (see FIG. 10) in which the display of the moving image content CTV is weakly restricted is set, and the process proceeds to S131. According to S128, the interrupt possibility notification MWi is additionally displayed on the upper edge of the main display area DA1.
- S127 it is determined whether or not the traveling speed of the own vehicle in a traffic jam exceeds a speed threshold value (for example, about 30 km / h). If it is determined in S127 that the traveling speed is less than the speed threshold value and the own vehicle is traveling at a low speed (about 0 to 29 km / h), the process proceeds to S129.
- the second task mode DMr2 (see FIG. 11) in which the display of the moving image content CTV is moderately restricted is set, and the process proceeds to S131.
- the interrupt prediction notification MWf is additionally displayed on the upper edge of the main display area DA1.
- the second task mode DMr3 is set in S130 and the process proceeds to S131.
- S131 it is determined whether or not to end the second task mode. As an example, when there is a user operation to end the display of the moving image content CTV, the S131 determines the end of the second task mode. As another example, when the status information indicating the end or interruption of the level 3 automatic operation by the automatic operation ECU 50b is acquired, the S131 determines the end of the second task mode. When it is determined in S131 that the second task mode is to be continued, the process returns to S122 to continue providing the video content CTV or the like to the driver. As described above, for example, even when the determined congestion pattern shifts from the non-specific pattern to the specific pattern, the adjustment for strengthening the display restriction of the moving image content CTV is performed by switching the second task mode.
- the process proceeds to S132.
- the screen of the CID 22 is switched from the second task mode to the normal mode, and a series of content control processes is completed.
- the CID 22 in the normal mode may display the status display of the vehicle Am, the image of the rear camera, and the like.
- the provision control unit 77 shown in FIG. 3 changes the permissible range of the second task permitted to the driver during the automatic driving period based on the information provided by the traffic jam determination unit 72.
- the provision control unit 77 makes adjustments to widen the permissible range of the second task permitted to the driver when the traffic is in a non-specific pattern, as compared to when the traffic is in a specific pattern.
- both hands of the driver are not blocked. Therefore, the driver can promptly respond to the request for a change of operation for handover. Therefore, the operation of the CID 22 including the viewing of the moving image content CTV is a second task that is easily permitted.
- both hands or one hand of the driver are blocked. Therefore, it becomes difficult for the driver to promptly respond to a request for a change of operation for handover. Therefore, the operation of the user terminal and the act of eating are the second tasks that are difficult to be permitted.
- the provision control unit 77 not only operates the CID 22 but also operates the user terminal and acts such as eating when the own vehicle automatically travels in a traffic jam of a non-specific pattern in which interrupts occur relatively infrequently. , Include in the second task tolerance.
- the operation of CID22 is included in the permissible range of the second task, while the operation of the user terminal and actions such as eating are included in the second task. Exclude from task tolerance.
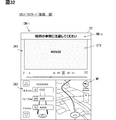
- the provision control unit 77 sets the CID 22 in the second task mode DMa when the second task being executed specified by the integrated state estimation unit 75 is an unauthorized type out of the permissible range, as shown in FIG.
- the interruption request notification MWr is displayed in the main display area DA1 of.
- the interruption request notification MWr is a display object including a warning message such as "performing an unauthorized task”.
- the interruption request notification MWr is displayed in a horizontally long strip near the upper edge of the main display area DA1 so as to overlap a part of the moving image content CTV.
- the provision control unit 77 adds the display of the interruption request notification MWr and causes the audio device 24 to reproduce a voice message requesting the interruption of the task being executed.
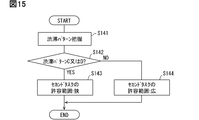
- FIGS. 15 and 16 show details of the range control process for controlling the allowable range of the second task and the state monitoring process for monitoring the driver status and calling attention to the execution of the unauthorized task. Based on this, the following description will be made with reference to FIGS. 3 and 14.
- the providing control unit 77 starts the range control process and the state monitoring process based on the acquisition of the status information indicating the start of automatic driving by the automatic operation ECU 50b.
- the providing control unit 77 repeatedly starts the range control process and the state monitoring process at a predetermined cycle until the automatic traveling by the automatic operation ECU 50b is completed.
- the congestion pattern determination result by the congestion determination unit 72 is referred to, the congestion pattern around the own vehicle is grasped, and the process proceeds to S142.
- S142 it is determined whether or not there is a specific pattern of traffic congestion. If it is determined in S142 that the vehicle is in a traffic jam of a specific pattern, that is, if the determination result indicates a traffic jam pattern C or a traffic jam pattern D, the process proceeds to S143.
- S143 the permissible range of the second task is set narrow so as to disallow the operation of the user terminal and the action such as eating, and the current range control process is terminated.
- the process proceeds to S144.
- the permissible range of the second task is set wide so as to permit the operation of the user terminal and the action such as eating, and the current range control process is terminated.
- S151 of the state monitoring process shown in FIG. 16 the permitted range of the second task set in the range control process (see FIG. 15) is grasped, and the process proceeds to S152.
- the driver grasps the second task currently being performed, and proceeds to S153.
- S153 it is determined whether or not the second task being executed grasped in S152 is within the current permissible range grasped in S151. If it is determined in S153 that the second task being executed is within the permissible range, the current status monitoring process is terminated.
- the process proceeds to S154.
- the interruption request of the second task being executed is output to the driver, and the current state monitoring process is terminated.
- the interruption request notification MWr is additionally displayed on the CID 22 (see FIG. 14).
- the display of the video content CTV provided to the driver is restricted when a sign of an interruption to the front by the adjacent vehicle Ad is detected. Will be done. Therefore, the prediction of the occurrence of the interrupt by the adjacent vehicle Ad is notified to the driver by the display change occurring in the moving image content CTV being provided. According to these notifications, the automatic driving function makes it less likely to cause anxiety to the driver when driving in a traffic jam.
- the automatic driving function implements braking control such as securing a distance from the adjacent vehicle Ad, for example.
- braking control such as securing a distance from the adjacent vehicle Ad, for example.
- Such changes in the behavior of the own vehicle are directed to the video content CTV, and are suddenly felt by the driver who does not grasp the situation around the own vehicle, which tends to cause anxiety of the driver. Therefore, if a display change is caused in the video content CTV when a sign of interruption is detected, the driver will be aware of the possibility of the behavior change occurring before the behavior change actually occurs in the own vehicle. Can be recognized. As a result, when an interrupt actually occurs, the driver's anxiety about changes in the behavior of the own vehicle can be reduced.
- the automatic driving function when the vehicle is driven in a traffic jam by the automatic driving function, if it is determined that the traffic jam has a specific pattern in which an interrupt by an adjacent vehicle Ad is likely to occur, the video content CTV provided to the driver is displayed. Is restricted. Therefore, the possibility of interrupt generation by the adjacent vehicle Ad can be notified to the driver by the display change occurring in the moving image content CTV being provided. According to these notifications, the automatic driving function makes it less likely to cause anxiety to the driver when driving in a traffic jam.
- the automatic driving function when the vehicle is driven in a traffic jam by the automatic driving function, if it is determined that the traffic jam has a specific pattern in which an interrupt by an adjacent vehicle Ad is likely to occur, the permissible range of the specific action permitted to the driver is determined. It is narrowed down. Therefore, when there is a possibility that an interrupt is generated by the adjacent vehicle Ad, the second task, which tends to cause anxiety, may be disallowed due to the change in the allowable range. As a result, the automatic driving function makes it difficult for the driver to feel uneasy when driving in a traffic jam.
- the driver can perform the behavior change before the actual change in the vehicle.
- the possibility of behavior change can be recognized in advance.
- the driver's anxiety about changes in the behavior of the own vehicle can be reduced.
- the interrupt prediction unit 73 detects an interrupt execution sign of the adjacent vehicle Ad.
- the display of the moving image content CTV is restricted.
- the congestion determination unit 72 determines that a specific pattern of congestion is in progress. , The display of the moving image content CTV is restricted.
- the driver's attention will be more likely to be directed to the situation around the vehicle, away from the video content CTV.
- the driver can predict the change in the behavior of the own vehicle due to the interruption of the adjacent vehicle Ad. Therefore, the driver's anxiety about the actual behavior change can be reduced.
- the driver can continue to watch the video content CTV while paying attention to the situation around the vehicle by relaxing the display restriction of the video content CTV. As a result, it is possible to call attention that is difficult to feel annoying while reducing the driver's anxiety.
- the display restriction when the congestion determination unit 72 determines that the vehicle is in a specific pattern of congestion is the case where the interruption prediction unit 73 detects an interruption sign of the adjacent vehicle Ad. It is weaker than the display limit of. Based on the above, it is possible to call attention so as not to interfere with the viewing of the moving image content CTV while directing the driver's attention to the surroundings of the own vehicle.
- the provision control unit 77 determines whether or not the traveling speed of the own vehicle in the traffic jam exceeds the speed threshold value. Then, when the traveling speed of the own vehicle exceeds the speed threshold value, the display of the content is restricted as compared with the case where the traveling speed exceeds the speed threshold value. As described above, when the traveling speed becomes high, it becomes difficult to secure the time to call attention based on the sign detection. Therefore, according to the process of strengthening the display restriction of the video content CTV during high-speed driving, the driver's attention is directed to the surroundings of the vehicle at an early stage, and the driver recognizes the possibility of behavior change with a time margin. It becomes possible to make it.
- the video content CTV corresponds to the "content”
- the provision control unit 77 corresponds to the “provision restriction unit”
- the HCU 100 corresponds to the "presentation control device”.
- the traffic jam pattern A and the traffic jam pattern B correspond to the traffic jam of the "non-specific pattern”
- the traffic jam pattern C and the traffic jam pattern D correspond to the traffic jam of the "specific pattern”.
- the second embodiment of the present disclosure shown in FIGS. 17 to 35 is a modification of the first embodiment.
- the second embodiment when the vehicle Am is traveling in a traffic jam by the automatic driving function, the situation behind the vehicle Am is grasped, and the display restriction of the video content CTV according to the prediction of a rear-end collision is implemented. Will be done.
- the peripheral monitoring sensor 30 shown in FIG. 17 includes a camera unit 31 and a millimeter wave radar 32 that detect the front and sides of the own vehicle, as well as a camera unit 31 and millimeters that have a detection range of the rear and rear sides of the own vehicle. It also has a wave radar 32.
- the peripheral monitoring sensor 30 detects the rear vehicle Ab (see FIG. 18) and the rear side vehicle Abs (see FIG. 18) in addition to the front vehicle Af and the adjacent vehicle Ad as other vehicles traveling around the own vehicle. do.
- the peripheral monitoring sensor 30 can use the detection configuration of the rider, sonar, etc. to detect the rear vehicle Ab and the rear side vehicle Abs.
- the peripheral monitoring sensor 30 provides the detection information behind the vehicle to the automatic driving system 50.
- the environment recognition unit 61 of the automatic driving system 50 grasps the relative positions and relative speeds of the rear vehicle Ab and the rear side vehicle Abs based on the detection information behind the own vehicle by the peripheral monitoring sensor 30. As the rear vehicle Ab1, the environment recognition unit 61 travels in the proximity rear vehicle Ab1 (see FIG. 18) traveling in the own vehicle lane at a position close to the own vehicle and at a position farther from the own vehicle than the close rear vehicle Ab1. It recognizes a distant rear vehicle Ab2 (see FIG. 25). The environment recognition unit 61 distinguishes between the near-rear vehicle Ab1 and the far-rear vehicle Ab2 based on the inter-vehicle distance from the own vehicle, the relative speed (inter-vehicle time), and the like.
- the proximity rear vehicle Ab1 is another vehicle that follows the own vehicle at a common sense interval (a few meters to a dozen meters) during a traffic jam.
- the distant rear vehicle Ab2 is not limited to the other vehicle traveling in the own vehicle lane, and may be another vehicle traveling in the adjacent lane.
- the inter-vehicle distance from the own vehicle to the near rear vehicle Ab1 and the far rear vehicle Ab2 are both stable.
- the environment recognition unit 61 recognizes other vehicles that are located behind the own vehicle and travel in the adjacent lane in the vicinity of the own vehicle as rear side vehicles Abs.
- the environment recognition unit 61 provides the recognition results of the rear vehicle Ab and the rear side vehicle Abs to the HCU 100 together with the recognition results of other driving environments.
- the HCU 100 further has a rear grasping unit 76 as a functional unit that manages the execution of the driver's second task during automatic driving in a congested section.
- the rear grasping unit 76 grasps the existence of the rear vehicle Ab and the rear side vehicle Abs traveling behind the vehicle Am based on the recognition result acquired from the environment recognition unit 61 via the information acquisition unit 71.
- the traffic jam determination unit 72 Based on the information of the rear vehicle Ab and the rear side vehicle Abs grasped by the rear grasping unit 76, the traffic jam determination unit 72 has a traffic jam pattern around the own vehicle during the automatic driving period during the traffic jam (congestion level 3). To determine. In addition to the traffic jam patterns A to D (see FIGS. 4 to 7) of the first embodiment, the traffic jam determination unit 72 has traffic jam patterns E to H, J, and K (see FIGS. 4 to 7) according to the situation of other vehicles behind the own vehicle. 18 to 26 and 31), the traffic jam pattern to which the current traffic jam around the own vehicle corresponds is specified.
- the traffic jam pattern E shown in FIGS. 18 and 19 is a state in which the periphery of the vehicle Am is filled with other vehicles.
- the traffic jam determination unit 72 determines that the traffic jam is pattern E when all the proximity rear vehicle Ab1 and the rear side vehicle Abs are present in addition to the front vehicle Af and the adjacent vehicle Ad.
- the traffic jam pattern E shown in FIG. 18 is premised on the traffic jam pattern A (see FIG. 4), and the vehicle Am and the proximity rear vehicle Ab1 are traveling on the central lane Ln2 of the road including three or more lanes.
- the rear side vehicle Abs exists in both the leftmost lane Ln1 and the rightmost lane Ln3.
- the traffic jam pattern E shown in FIG. 19 is premised on the traffic jam pattern B (see FIG. 5), and the vehicle Am and the proximity rear vehicle Ab1 are traveling in the left end lane Ln1 or the right end lane Ln3.
- the rear side vehicle Abs is traveling in the central lane Ln2.
- the traffic jam pattern F shown in FIGS. 20 and 21 is a state in which only the rear of the own vehicle lane is vacant.
- the traffic jam determination unit 72 determines that the traffic jam is pattern F when the front vehicle Af, the adjacent vehicle Ad, and the rear side vehicle Abs are present, but the rear vehicle Ab (proximity rear vehicle Ab1) is not present. ..
- the traffic jam pattern F shown in FIG. 20 is premised on the traffic jam pattern A (see FIG. 4), and is in a state where the rear of the vehicle Am traveling on the central lane Ln2 is vacant.
- rear side vehicles Abs are present in both the leftmost lane Ln1 and the rightmost lane Ln3.
- the traffic jam pattern F shown in FIG. 21 is premised on the traffic jam pattern B (see FIG. 5), and is in a state where the rear of the vehicle Am traveling on the leftmost lane Ln1 or the rightmost lane Ln3 is vacant.
- the central lane Ln2 the rear side vehicle Abs exists.
- the traffic jam pattern G shown in FIGS. 22 and 23 is a state in which only the rear part other than the own vehicle lane (adjacent lane) is vacant.
- the traffic jam determination unit 72 determines that the traffic jam is pattern G when the front vehicle Af, the adjacent vehicle Ad, and the rear vehicle Ab (proximity rear vehicle Ab1) are present, but the rear side vehicle Abs is not present. ..
- the traffic jam pattern G shown in FIG. 22 is premised on the traffic jam pattern A (see FIG. 4), and the vehicle Am and the proximity rear vehicle Ab1 are traveling in the central lane Ln2. On the other hand, at least one of the leftmost lane Ln1 and the rightmost lane Ln3 has a space in which the rear side vehicle Abs does not exist.
- the traffic jam pattern G shown in FIG. 23 is premised on the traffic jam pattern B (see FIG. 5), and the vehicle Am and the proximity rear vehicle Ab1 are traveling in the left end lane Ln1 or the right end lane Ln3. On the other hand, in the central lane Ln2, there is a space in which the rear side vehicle Abs does not exist.
- the traffic jam pattern H shown in FIG. 24 is a state in which a lane other than the own vehicle lane (adjacent lane) is vacant.
- the congestion determination unit 72 determines that the traffic is pattern H when the front vehicle Af and the rear vehicle Ab (proximity rear vehicle Ab1) are present but the rear side vehicle Abs is not present.
- the traffic jam pattern H is premised on the traffic jam pattern C (see FIG. 6), and the vehicle Am and the proximity rear vehicle Ab1 are traveling in the central lane Ln2.
- at least one of the leftmost lane Ln1 and the rightmost lane Ln3 has a space in which the adjacent vehicle Ad and the rear side vehicle Abs do not exist.
- the congestion pattern J shown in FIGS. 25 and 26 shows a state in which the proximity rear vehicle Ab1 and the rear side vehicle Abs do not exist, while the distant rear vehicle Ab2 traveling at substantially the same speed as the own vehicle Am exists.
- the traffic jam pattern J shown in FIG. 25 is premised on the traffic jam pattern A (see FIG. 4), and at least one distant rear vehicle Ab2 exists behind the vehicle Am traveling in the central lane Ln2.
- the traffic jam pattern J shown in FIG. 26 is premised on the traffic jam pattern B (see FIG. 5), and at least one distant rear vehicle Ab2 exists behind the vehicle Am traveling on the leftmost lane Ln1 or the rightmost lane Ln3. There is.
- Congestion pattern K (see FIG. 31) is a state in which a distant rear vehicle Ab2 does not exist in addition to the close rear vehicle Ab1 and the rear side vehicle Abs.
- the traffic jam determination unit 72 determines that the traffic jam is pattern K when the distant rear vehicle Ab2 is not recognized by the peripheral monitoring sensor 30.
- the congestion determination unit 72 shown in FIG. 17 determines whether or not the route lane Lnr is the risk section SeR in the congestion pattern D traveling on the route lane Lnr (see the dot range of FIGS. 8 and 27) specified based on the route information. Further judgment.
- the risk section SeR is the section associated with merging or branching. Specifically, the section of the branch lane branching from the main line lane (see FIG. 8) that is in contact with the main line lane, and the section of the main line that is connected to the confluence lane (see FIG. 27) that is in contact with the confluence lane. Etc. are defined in the risk section SeR.
- the display restriction of the video content CTV or the restriction of the second task is continued until the vehicle Am passes through the end point NE of the risk section SeR.
- the congestion determination unit 72 determines whether the traveling road is a road with one lane on each side (see FIG. 28). To judge. On such a road with one lane on each side, interruption from the adjacent oncoming lane Lna to the own vehicle lane Lns does not substantially occur. Therefore, when the traffic jam determination unit 72 determines that the vehicle is traveling on a road with one lane on each side, the display restriction of the video content CTV or the restriction of the second task by the provision control unit 77 is canceled.
- the details of the traffic jam determination process of the second embodiment carried out by the traffic jam determination unit 72 will be described below with reference to FIGS. 17 to 26 and 31 based on FIGS. 29 and 30.
- the processing contents of S201 to S207 and S209 in the second embodiment are substantially the same as the processing contents of S101 to S108 (see FIG. 8) of the first embodiment. Therefore, a detailed description of the step will be omitted.
- S208 it is determined whether or not the route lane Lnr in the traffic jam is the risk section SeR. If it is determined in S208 that it is not the risk section SeR, the process proceeds to S207, and it is determined that the area around the vehicle is a traffic jam pattern of pattern C. On the other hand, if it is determined that the risk section SeR is set, the process proceeds to S209, and it is determined that the congestion pattern D has a higher interruption risk than the congestion pattern C.
- S210 after the front and side congestion patterns are specified by S203 to S209, the existence of the proximity rear vehicle Ab1 which is the rear vehicle traveling behind the own vehicle and is close to the own vehicle is grasped.
- the vehicle proceeds to S211 and the existence of the rear side vehicle Abs traveling in the adjacent lane is grasped. If it is determined in S211 that the rear side vehicle Abs exists in all the adjacent lanes, the process proceeds to S212.
- S212 it is determined that the surroundings of the own vehicle are the congestion patterns of the pattern E, the determination results of the congestion patterns A to D are updated, and the process proceeds to S221.
- the process proceeds to S213.
- S213 it is determined whether or not there is an adjacent vehicle Ad traveling in the adjacent lane. If it is determined in S213 that the adjacent vehicle Ad exists in all the adjacent lanes, the process proceeds to S214.
- S214 it is determined that the surroundings of the own vehicle are the congestion pattern of the pattern G, the determination result of the congestion pattern A or B is updated, and the process proceeds to S221.
- S215 it is determined that the surroundings of the own vehicle are the congestion pattern of the pattern H, the determination result of the congestion pattern C or D is updated, and the process proceeds to S221.
- the vehicle proceeds to S216 and the existence of the rear side vehicle Abs traveling in the adjacent lane is grasped. If it is determined in S216 that the rear side vehicle Abs exists in all the adjacent lanes, the process proceeds to S217. In S217, it is determined that the surroundings of the own vehicle are the congestion patterns of the pattern F, the determination results of the congestion patterns A to D are updated, and the process proceeds to S221.
- the process proceeds to S218.
- S218 it is determined whether or not there is a distant rear vehicle Ab2. If it is determined in S218 that at least one distant rear vehicle Ab2 exists, the process proceeds to S219.
- S219 it is determined that the surroundings of the own vehicle are the congestion patterns of the pattern J, the determination results of the congestion patterns A to D are updated, and the process proceeds to S221.
- the process proceeds to S220.
- S220 it is determined that the surroundings of the own vehicle are the congestion patterns of the pattern K, the determination results of the congestion patterns A to D are updated, and the process proceeds to S221. Further, when the situation behind the own vehicle becomes unclear due to factors such as the road shape and weather information, the determination conclusion with the congestion patterns A to D is maintained, and the process proceeds to S221.
- S221 it is determined whether or not the traveling speed of the own vehicle exceeds the congestion elimination threshold value based on the latest vehicle speed information. If it is determined in S221 that the traveling speed is equal to or less than the congestion elimination threshold value, the process returns to S204. On the other hand, when it is determined in S221 that the traveling speed exceeds the congestion elimination threshold value, the current congestion determination process is terminated.
- the providing control unit 77 changes the permissible range of the second task permitted to the driver during the automatic driving period according to the situation of the rear vehicle Ab grasped by the rear grasping unit 76, and changes the allowable range of the second task, and the moving image content CTV. Restrict the display of. Specifically, the provision control unit 77 predicts the risk of a rear-end collision from the rear of the own vehicle based on the determination result of the traffic pattern by the traffic congestion determination unit 72, and switches the second task mode according to the rear-end collision risk. The provision control unit 77 adjusts the entertainment content display restriction provided during the automatic driving period by switching the second task mode. When the congestion determination unit 72 determines that a specific pattern of congestion is occurring, the provision control unit 77 can tighten the restriction on the display of the provided moving image content CTV.
- the level of the rear-end collision risk is set for each congestion pattern (see FIG. 31).
- the rear-end collision risk is ranked as congestion pattern K, congestion pattern J, congestion pattern E, congestion pattern G, congestion pattern, congestion pattern F, and congestion patterns A to D. That is, the traffic jam pattern K in which the rear-end vehicle Ab does not exist is regarded as the traffic jam pattern having the lowest rear-end collision risk.
- the states of the traffic jam patterns A to D in which the existence of the rear-end vehicle Ab cannot be confirmed are regarded as the traffic jam patterns having the highest rear-end collision risk.
- the provision control unit 77 relaxes the limitation of the second task and weakens or eliminates the limitation of the display of the video content CTV as the collision risk becomes lower.
- the providing control unit 77 sets the permissible range of the second task to be narrower when the rear vehicle Ab traveling in the same lane as the own vehicle is not grasped than when the rear vehicle Ab is grasped, and displays the video content CTV. Tighten the restrictions. That is, the provision control unit 77 registers that the traffic jam patterns F, A to D in which the rear-end vehicle Ab is not grasped are the specific patterns of traffic jam in which the rear-end collision risk of the rear-end vehicle Ab is likely to increase. On the other hand, a traffic jam pattern other than the traffic jam patterns F and A to D, in which the rear side of the own vehicle is guarded by the near rear vehicle Ab1 or the far rear vehicle Ab2, is a non-specific pattern of traffic congestion.
- the provision control unit 77 is set to the second task mode DMn (see FIG. 9) in which the display of the video content CTV is not restricted when the traffic jam determination unit 72 recognizes that the traffic jam pattern is any of K, J, and E. do. As a result, the moving image content CTV is normally displayed in the main display area DA1.
- the provision control unit 77 sets the second task mode DMr1 (see FIG. 32) in which the display of the video content CTV is slightly restricted.
- the peripheral vehicle notification MWis is displayed in the main display area DA1.
- the peripheral vehicle notification MWis is a display object including a warning message such as "Be careful of surrounding vehicles”.
- the peripheral vehicle notification MWis is displayed in a horizontally long band near the upper edge of the main display area DA1, and slightly hides the upper edge portion of the moving image content CTV.
- the reproduction of the video and audio of the moving image content CTV is continued.
- the display of the video content CTV is further restricted to the second task mode DMr2 (2nd task mode DMr2). (See FIG. 33).
- the peripheral vehicle caution MWbn is displayed in the main display area DA1.
- Peripheral vehicle caution MWbn is a display object including a warning message such as "Be careful of vehicles in front and behind”. The alert by the peripheral vehicle caution MWbn is stronger than the information presentation by the peripheral vehicle notification MWis (see FIG. 32).
- the peripheral vehicle caution MWbn is displayed in a horizontally long band near the upper edge of the main display area DA1 so as to overlap a part of the moving image content CTV, similarly to the peripheral vehicle notification MWis. Most of the video content CTV is visible to the driver, even if hidden by the surrounding vehicle caution MWbn.
- the content control process is executed by the providing control unit 77 during the automatic traveling period in which the vehicle Am travels by the automatic driving function.
- the display of the CID 22 is set to the second task mode DMn (see FIG. 9), and the process proceeds to S222.
- S222 it is determined whether or not the surroundings of the own vehicle are in a traffic jam based on the result of the traffic jam determination by the traffic jam determination unit 72. If it is determined in S222 that there is no traffic jam, the process returns to S221 and the second task mode DMn is continued. On the other hand, if it is determined in S222 that the traffic is congested, the process proceeds to S223.
- S224 based on the determination result by the interruption determination unit 74, it is determined whether or not the adjacent vehicle Ad is executing an interrupt toward the front of the own vehicle. If it is determined in S224 that the adjacent vehicle Ad is interrupting, the process proceeds to S232. In S232, the second task mode DMr3 (see FIG. 12) is set, and the process proceeds to S233. On the other hand, if it is determined in S224 that the adjacent vehicle Ad is not interrupting, the process proceeds to S225. In S225, the presence / absence of interrupt prediction is determined with reference to the determination result by the interrupt prediction unit 73. If it is determined in S225 that there is no interrupt prediction for the adjacent vehicle Ad, the process proceeds to S226. In S226, the second task mode DMn is set, and the process proceeds to S233. On the other hand, if it is determined in S225 that there is an interrupt prediction for the adjacent vehicle Ad, the process proceeds to S227.
- S227 it is determined whether or not the traffic congestion around the own vehicle corresponds to any of the patterns K, J, and E. If it is determined in S227 that there is congestion in any of the patterns K, J, and E, the process proceeds to S226 and the second task mode DMn is set. On the other hand, if it is determined in S227 that none of the patterns K, J, and E is applicable, the process proceeds to S228.
- S2208 it is determined whether or not there is a specific pattern of traffic congestion in which the risk of a rear-end collision is likely to increase. Specifically, in S228, it is determined whether or not the traffic congestion around the own vehicle corresponds to any of the patterns A to D and F. If it is determined in S228 that none of the patterns A to D and F is applicable, that is, the pattern G or H is in a traffic jam, the process proceeds to S230. In S230, the second task mode DMr1 (see FIG. 32) with a weak restriction is set, and the process proceeds to S233. On the other hand, if it is determined in S228 that the traffic jam is any of the patterns A to D and F, that is, the traffic jam is a specific pattern, the process proceeds to S229.
- S229 it is determined whether or not the traveling speed during the traffic jam exceeds the speed threshold value. If it is determined in S229 that the traveling speed is less than the speed threshold value, the process proceeds to S231. In S231, the setting is set to the second task mode DMr2 (see FIG. 33) in which the display restriction of the moving image content CTV is stronger than that of the second task mode DMr1, and the process proceeds to S233. On the other hand, if it is determined in S229 that the traveling speed exceeds the speed threshold value, the process proceeds to S232, the second task mode DMr3 is set to the second task mode DMr3 in which the display restriction of the moving image content CTV is further strengthened, and the process proceeds to S233.
- S233 it is determined whether or not to end the second task mode.
- the process returns to S222 and the provision of the moving image content CTV or the like is continued.
- the process proceeds to S234.
- the screen of the CID 22 is switched from the second task mode to the normal mode, and a series of content control processes is completed.
- the congestion pattern around the own vehicle is grasped based on the determination result of the congestion pattern by the congestion determination unit 72, and the process proceeds to S242.
- S242 similarly to S228 (see FIG. 34) of the content control process, it is determined whether or not there is a specific pattern of traffic congestion in which the risk of a rear-end collision is likely to increase. Specifically, when it is determined in S242 that the traffic congestion around the own vehicle corresponds to any of patterns A to D and F, which is a specific pattern, the process proceeds to S243. In S243, the permissible range of the second task is set narrowly, and the current range control process is terminated.
- the permissible range of the second task permitted to the driver is changed according to the situation of the rear vehicle Ab grasped by the rear grasping unit 76. Specifically, in a specific pattern of traffic congestion with a high rear-end collision risk, operations such as operation of the user terminal and meals are not permitted. On the other hand, in a non-specific pattern of traffic congestion with a low rear-end collision risk, operations such as operation of the user terminal and meals are permitted.
- the second embodiment described so far also has the same effect as that of the first embodiment, and the driver is notified of the prediction of the occurrence of an interrupt by the adjacent vehicle Ad.
- the driver's anxiety can be alleviated during the period of traveling in the traffic jam by the automatic driving function.
- the automatic driving function when traveling in a traffic jam by the automatic driving function, the display of the provided video content CTV is restricted according to the situation of the rear vehicle Ab traveling behind the own vehicle. Therefore, the risk of a rear-end collision is notified to the driver by the display change that occurs in the video content CTV being provided. According to these notifications, the automatic driving function makes it less likely to cause anxiety to the driver when driving in a traffic jam.
- the automatic driving function when the vehicle is driven in a traffic jam by the automatic driving function, if it is determined that the traffic jam pattern is a specific traffic jam pattern in which the rear-end collision risk of the rear vehicle Ab is likely to increase, the video content CTV provided to the driver is displayed. Be restricted. Therefore, the rear-end collision risk of the rear-end vehicle Ab can be notified to the driver by the display change occurring in the content being provided. According to these notifications, the automatic driving function makes it less likely to cause anxiety to the driver when driving in a traffic jam.
- the allowable range of the second task permitted to the driver is changed according to the situation of the rear vehicle Ab traveling behind the own vehicle. Therefore, when there is a risk of a rear-end collision, a change in tolerance can disallow a second task that tends to cause anxiety. As a result, the automatic driving function makes it difficult for the driver to feel uneasy when driving in a traffic jam.
- the provision control unit 77 determines whether or not the traveling lane is a risk section SeR related to merging or branching. To judge. Then, the provision control unit 77 continues to limit the display of the moving image content CTV in the case of a scene such as a traffic jam pattern D (see FIGS. 7 and 27) in which the own vehicle travels in the risk section SeR. In the risk section SeR during traffic congestion, interruption of the adjacent vehicle Ad is more likely to occur than in the normal section where there is no merging or branching. Therefore, the driver's anxiety can be further alleviated by adding a process for determining the road environment in which an interrupt is likely to occur and continuing to notify the state having a high possibility of being interrupted.
- the provision control unit 77 determines whether the traveling road is a road with one lane on each side (see FIG. 28). Then, when the own vehicle travels on a road with one lane on each side, the provision control unit 77 cancels the display restriction of the moving image content CTV. On a road with one lane on each side, no interruption occurs even during traffic jams. Therefore, by limiting the display of the moving image content CTV on a road with one lane on each side, in other words, by stopping the notification of the interrupt, the convenience of the driver in automatic driving can be improved.
- the second task allowable range permitted to the driver is set narrower than when the rear vehicle Ab is grasped. .. That is, the providing control unit 77 limits the display of the moving image content CTV when the rear vehicle traveling in the same lane as the own vehicle is not grasped, as compared with the case where the rear vehicle Ab is grasped.
- the risk of a rear-end collision from the rear is lower than when the rear range is empty. Therefore, when the rear-end vehicle Ab is grasped, if the permission range of the second task is expanded or the display restriction of the video content CTV is relaxed, it is possible to achieve both the rear-end collision risk and the convenience during automatic driving. ..
- the congestion patterns A to D and F correspond to the congestion of the "specific pattern”
- the other congestion patterns E, G, H, J and K are the “non-specific patterns”. Corresponds to the traffic jam.
- the display restriction of entertainment content was switched among three stages of "strong", “medium”, and “weak”.
- the degree of display restriction may be switched in two stages, or may be switched in four or more stages. Further, the switching of whether or not to restrict the display may be simply performed.
- the display restriction based on the congestion determination of the specific pattern is omitted.
- the provision control unit 77 of the first modification sets the second task mode in which the display limit is set to "weak" when an interrupt execution sign is detected, and sets the display limit to "weak” when it is determined that the interrupt is being executed. Set to the second task mode of "strong”. Further, the provision control unit 77 of the second modification limits the display of the video content CTV when the interrupt execution sign is detected, and displays the video content CTV when the interrupt execution sign is not detected. Do not limit.
- the display restriction based on the detection of the execution sign of the interrupt is omitted.
- the provision control unit 77 of the modification 3 sets the second task mode in which the display limit is set to "weak" when it is determined that the traffic is in a specific pattern, and displays it when it is determined that the interrupt is being executed. Set to the second task mode with the limit set to "strong".
- the provision control unit 77 of the modification 4 limits the display of the moving image content CTV when it is determined that the vehicle is in a specific pattern of traffic, and when it is determined that the video content CTV is in a non-specific pattern of traffic.
- the display of video content CTV is not restricted.
- the process of strengthening the display restriction of the content includes a process of switching the restriction from off to on and a process of strengthening the weak restriction.
- the same degree of display restriction is applied when it is determined that the traffic jam has a specific pattern and when a sign of interruption is detected.
- the provision control unit 77 sets a second task mode in which the display limit is set to "weak" based on a specific pattern of traffic jam determination or interrupt prediction.
- the display restriction based on the determination during execution of the interrupt is omitted.
- the provision control unit 77 sets the display limit to "weak” when it is determined that the traffic is in a specific pattern, and sets the display limit to "strong” when an interrupt execution sign is detected. Set to the second task mode.
- the content display restriction is adjusted in multiple stages or continuously according to the traveling speed during the traffic jam. Specifically, as the traveling speed during traffic congestion increases, the provision control unit 77 expands the display area (for example, vertical width) of the interrupt prediction notification MWf (see FIG. 10) to increase the display area of the video content CTV. Narrow.
- the display restriction of the content according to the traveling speed during the traffic jam is omitted.
- the process of adjusting the allowable range of the second task based on the determination result of the traffic jam pattern is omitted.
- the provision control unit 77 of the modified example 10 of the second embodiment switches the restriction of the video content CTV from “none” to "strong” according to the situation of the rear vehicle Ab to be grasped during the traffic jam. Further, in the modified example 11 of the second embodiment, even when the vehicle is traveling on a road with one lane on each side, if it is determined that the vehicle is in a traffic jam, the display of the moving image content CTV is slightly restricted.
- the limitation of the video content CTV was set to either “none” or “weak” when the traffic jam was in a non-specific pattern with a low rear-end collision risk.
- the limitation of the moving image content CTV is limited to either "none" or "weak”.
- the integrated state estimation unit 75 acquires information indicating the backward tilt angle of the backrest portion of the driver's seat with respect to the left surface portion as reclining information.
- the integrated state estimation unit 75 grasps the reclining state of the driver's seat.
- the integrated state estimation unit 75 is set to tilt the backrest portion backward and relax as one type of the second task.
- the provision control unit 77 allows the driver's seat to recline when the allowable range of the second task is expanded. On the other hand, the provision control unit 77 does not allow the driver's seat to recline when the allowable range of the second task is narrowed. When the reclining of the driver's seat is out of the permissible range due to the transition of the congestion pattern, the providing control unit 77 prompts the driver to raise the backrest portion by a voice message from the audio device 24.
- the line-of-sight direction of the driver is detected by the driver monitor 29.
- the integrated state estimation unit 75 determines whether the line-of-sight direction of the driver is directed to a display device (for example, CID 22 or the like) that provides entertainment content.
- a display device for example, CID 22 or the like
- the providing control unit 77 does not display the interruption request notification MWr by the CID 22, but only alerts by a voice message.
- the providing control unit 77 can use the vibration devices provided in the driver's seat, the footrest, and the like to call attention to the driver who performs the second task out of the permissible range.
- the provision control unit 77 of the above embodiment has enabled the display restriction of entertainment-related contents based on the information regarding the interruption of the adjacent vehicle Ad to the front of the own vehicle.
- the provision control unit 77 may limit the display of the content by using the information regarding the interruption of the adjacent vehicle Ad to the rear of the own vehicle.
- hazard control may be implemented to notify the driver or alert the driver and inform the rear vehicle Ab that there is a traffic jam.
- the provision control unit 77 may limit the display of the content based on the information regarding the interruption of the adjacent vehicle Ad further ahead of the preceding vehicle.
- the automatic driving system 50 of the above embodiment is provided with two in-vehicle ECUs, a driving support ECU 50a and an automatic driving ECU 50b.
- a driving support ECU 50a may construct the automatic driving system 50.
- an automatic driving ECU 50b may construct the automatic driving system 50.
- the display device that displays the content related to the second task is not limited to CID22.
- meter displays 21 and HUD23 may be used to provide content.
- each display EMB, EML, EMR of the electronic mirror system may be used to provide the content.
- the display device for displaying the content may be selectable by the driver.
- the shape, emission color, display position, etc. of each image displayed on each display device may be appropriately changed.
- the language type of the message displayed on each display device may be appropriately changed based on the user settings such as the driver and the settings such as the country and region where the vehicle Am is used.
- the language type of the voice message reproduced by the audio device 24 may be changed as appropriate.
- the second task permitted to the driver may be changed as appropriate according to the regulations such as the Road Traffic Act of the country and region where the vehicle Am is used. Further, the avoidance action for avoiding the interruption of the second task is not limited to the automatic LC, and may be appropriately changed according to the driving scene.
- any one of the meter display 21, the CID 22 and the HUD 23 is integrally configured with the HCU 100.
- the processing function of the HCU 100 is implemented in the control circuit of any one display device.
- the display device including the processing function of the HCU 100 corresponds to the “presentation control device”.
- each function provided by the HCU 100 can be provided by the software and the hardware that executes the software, the hardware only, the hardware only, or a combination thereof. Further, when such a function is provided by an electronic circuit as hardware, each function can also be provided by a digital circuit including a large number of logic circuits or an analog circuit.
- the form of the storage medium for storing the program or the like that can realize the above presentation control method may be changed as appropriate.
- the storage medium is not limited to the configuration provided on the circuit board, and may be provided in the form of a memory card or the like, inserted into the slot portion, and electrically connected to the control circuit of the HCU. ..
- the storage medium may be an optical disk and a hard disk drive that serve as a copy base for the program to the HCU.
- control unit and its method described in the present disclosure may be realized by a dedicated computer constituting a processor programmed to execute one or a plurality of functions embodied by a computer program.
- the apparatus and method thereof described in the present disclosure may be realized by a dedicated hardware logic circuit.
- the apparatus and method thereof described in the present disclosure may be realized by one or more dedicated computers configured by a combination of a processor that executes a computer program and one or more hardware logic circuits.
- the computer program may be stored in a computer-readable non-transitional tangible recording medium as an instruction executed by the computer.
Abstract
HCUは、自動運転機能を備える車両において用いられ、ドライバへ向けた情報の提示を制御する提示制御装置の機能を備えている。HCUは、自動運転機能によって車両が走行する自動走行期間にて、渋滞中か否かを判定し、渋滞中であると判定した場合、自車に隣接した隣接車による割り込みの実施予兆を検知する。そして、隣接車による割り込みの実施予兆が検知された場合、自動走行期間に提供される動画コンテンツ(CTV)の表示を制限する。
Description
この出願は、2020年4月1日に日本に出願された特許出願第2020-66153号、及び、2021年2月24日に日本に出願された特許出願第2021-27773号を基礎としており、基礎の出願の内容を、全体的に、参照により援用している。
この明細書による開示は、車両のドライバへ向けた情報の提示を制御する提示制御装置及び提示制御プログラムに関する。
特許文献1に開示の車両制御装置は、渋滞が発生していることを判定する渋滞判定部と、渋滞発生区間の長さが所定値以上である場合に自動運転を開始させる自動運転開始判定部とを備えている。
特許文献1のように、自動運転機能によって車両が自動走行する期間において、ドライバへ向けたコンテンツ等の提供を許可することが検討されている。しかし、ドライバの注意がコンテンツ等に向けられていると、ドライバが不安を感じるシーンも生じ易くなる。例えば、渋滞中を走行する場合、他車両の割り込みが多く発生する。こうした渋滞中での他車両の割り込みが、自動運転機能による走行中に発生すると、ドライバの不安の要因となり得た。
本開示は、自動運転機能によって渋滞中を走行するとき、ドライバに不安を与え難い提示制御装置及び提示制御プログラムの提供を目的とする。
上記目的を達成するため、開示された一つの態様は、自動運転機能を備える車両において用いられ、車両のドライバへ向けた情報の提示を制御する提示制御装置であって、自動運転機能によって車両が走行する自動走行期間にて、渋滞中か否かを判定する渋滞判定部と、渋滞判定部にて渋滞中であると判定された場合に、車両である自車に隣接した隣接車による割り込みの実施予兆を検知する割込予測部と、割込予測部にて隣接車による割り込みの実施予兆が検知された場合に、自動走行期間に提供されるコンテンツの表示を制限する提供制限部と、を備える提示制御装置とされる。
また開示された一つの態様は、自動運転機能を備える車両において用いられ、車両のドライバへ向けた情報の提示を制御する提示制御プログラムであって、少なくとも一つの処理部に、自動運転機能によって車両が走行する自動走行期間にて、渋滞中か否かを判定し、渋滞中であると判定した場合に、車両である自車に隣接した隣接車による割り込みの実施予兆を検知し、隣接車による割り込みの実施予兆が検知された場合に、自動走行期間に提供されるコンテンツの表示を制限する、ことを含む処理を実行させる提示制御プログラムとされる。
これらの態様では、自動運転機能によって渋滞中を走行するとき、隣接車による割り込みの実施予兆が検知されると、ドライバに提供されるコンテンツの表示が制限される。故に、隣接車による割り込み発生の予測が、提供中のコンテンツに生じる表示変化により、ドライバに通知される。こうした通知によれば、自動運転機能によって渋滞中を走行するとき、ドライバに不安を与え難くなる。
また開示された一つの態様は、自動運転機能を備える車両において用いられ、車両のドライバへ向けた情報の提示を制御する提示制御装置であって、自動運転機能によって車両が走行する自動走行期間にて、車両である自車に隣接した隣接車による割り込みが発生し易いとして設定された特定パターンの渋滞中であるか否かを判定する渋滞判定部と、渋滞判定部にて特定パターンの渋滞中であると判定された場合に、自動走行期間に提供されるコンテンツの表示の制限を強める提供制限部と、を備える提示制御装置とされる。
また開示された一つの態様は、自動運転機能を備える車両において用いられ、車両のドライバへ向けた情報の提示を制御する提示制御プログラムであって、少なくとも一つの処理部に、自動運転機能によって車両が走行する自動走行期間にて、車両である自車に隣接した隣接車による割り込みが発生し易いとして設定された特定パターンの渋滞中であるか否かを判定し、特定パターンの渋滞中であると判定した場合に、自動走行期間に提供されるコンテンツの表示の制限を強める、ことを含む処理を実行させる提示制御プログラとされる。
これらの態様では、自動運転機能によって渋滞中を走行するとき、隣接車による割り込みが発生し易い特定パターンの渋滞であると判定されると、ドライバに提供されるコンテンツの表示が制限される。故に、隣接車による割り込み発生の可能性が、提供中のコンテンツに生じる表示変化により、ドライバに通知され得る。こうした通知によれば、自動運転機能によって渋滞中を走行するとき、ドライバに不安を与え難くなる。
また開示された一つの態様は、自動運転機能を備える車両において用いられ、車両のドライバへ向けた情報の提示を制御する提示制御装置であって、車両である自車の後方を走行する後方車の存在を把握する後方把握部と、自動運転機能によって車両が走行する自動走行期間にて、渋滞中か否かを判定する渋滞判定部と、渋滞中にて後方把握部により把握される後方車の状況に応じて、自動走行期間に提供されるコンテンツの表示を制限する提供制限部と、を備える提示制御装置とされる。
また開示された一つの態様は、自動運転機能を備える車両において用いられ、車両のドライバへ向けた情報の提示を制御する提示制御プログラムであって、少なくとも一つの処理部に、車両である自車の後方を走行する後方車の存在を把握し、自動運転機能によって車両が走行する自動走行期間にて、渋滞中か否かを判定し、渋滞中に把握する後方車の状況に応じて、自動走行期間に提供されるコンテンツの表示を制限する、ことを含む処理を実行させる提示制御プログラムとされる。
これらの態様では、自動運転機能によって渋滞中を走行するとき、自車の後方を走行する後方車の状況に応じて、自動走行期間に提供されるコンテンツの表示が制限される。故に、後方からの追突のリスクが、提供中のコンテンツに生じる表示変化によってドライバに通知される。こうした通知によれば、自動運転機能によって渋滞中を走行するとき、ドライバに不安を与え難くなる。
また開示された一つの態様は、自動運転機能を備える車両において用いられ、車両のドライバへ向けた情報の提示を制御する提示制御装置であって、車両である自車の後方を走行する後方車の存在を把握する後方把握部と、自動運転機能によって車両が走行する自動走行期間にて、後方車の追突リスクが高まり易いとして設定された特定パターンの渋滞中であるか否かを判定する渋滞判定部と、渋滞判定部によって特定パターンの渋滞中であると判定された場合に、自動走行期間に提供されるコンテンツの表示の制限を強める提供制限部と、を備える提示制御装置とされる。
また開示された一つの態様は、自動運転機能を備える車両において用いられ、車両のドライバへ向けた情報の提示を制御する提示制御プログラムであって、少なくとも一つの処理部に、車両である自車の後方を走行する後方車の存在を把握し、自動運転機能によって車両が走行する自動走行期間にて、後方車の追突リスクが高まり易いとして設定された特定パターンの渋滞中であるか否かを判定し、特定パターンの渋滞中であると判定した場合に、自動走行期間に提供されるコンテンツの表示の制限を強める、ことを含む処理を実行させる提示制御プログラムとされる。
これらの態様では、自動運転機能によって渋滞中を走行するとき、後方車の追突リスクが高まり易い特定パターンの渋滞であると判定されると、ドライバに提供されるコンテンツの表示が制限される。故に、後方車の追突リスクが、提供中のコンテンツに生じる表示変化により、ドライバに通知され得る。こうした通知によれば、自動運転機能によって渋滞中を走行するとき、ドライバに不安を与え難くなる。
また開示された一つの態様は、自動運転機能を備える車両において用いられ、車両のドライバへ向けた情報の提示を制御する提示制御装置であって、自動運転機能によって車両が走行する自動走行期間にて、渋滞中か否かを判定し、さらに車両である自車に隣接した隣接車による割り込みが発生し易いとして設定された特定パターンの渋滞中であるか否かを判定する渋滞判定部と、特定パターン以外の非特定パターンの渋滞中である場合、特定パターンの渋滞中である場合よりも、自動走行期間にてドライバに許可される運転以外の特定行為の許容範囲を広く設定する提供制限部と、を備える提示制御装置とする。
また開示された一つの態様は、自動運転機能を備える車両において用いられ、車両のドライバへ向けた情報の提示を制御する提示制御プログラムであって、少なくとも一つの処理部に、自動運転機能によって車両が走行する自動走行期間にて、車両である自車に隣接した隣接車による割り込みが発生し易いとして設定された特定パターンの渋滞中であるか否かを判定し、特定パターン以外の非特定パターンの渋滞中である場合、特定パターンの渋滞中である場合よりも、自動走行期間にてドライバに許可される運転以外の特定行為の許容範囲を広く設定する、ことを含む処理を実行させる提示制御プログラムとされる。
これらの態様では、自動運転機能によって渋滞中を走行するとき、隣接車による割り込みが発生し易い特定パターンの渋滞であると判定されると、ドライバに許可される特定行為の許容範囲が狭められる。故に、隣接車による割り込み発生の可能性があるとき、許容範囲の変化により、不安を感じ易い特定行為が不許可とされ得る。その結果、自動運転機能によって渋滞中を走行するとき、ドライバに不安を与え難くなる。
また開示された一つの態様は、自動運転機能を備える車両において用いられ、車両のドライバへ向けた情報の提示を制御する提示制御装置であって、車両である自車の後方を走行する後方車の存在を把握する後方把握部と、自動運転機能によって車両が走行する自動走行期間にて、渋滞中か否かを判定する渋滞判定部と、渋滞中にて後方把握部により把握される後方車の状況に応じて、自動走行期間にてドライバに許可される運転以外の特定行為の許容範囲を変更する提供制限部と、を備える提示制御装置とされる。
また開示された一つの態様は、自動運転機能を備える車両において用いられ、車両のドライバへ向けた情報の提示を制御する提示制御プログラムであって、少なくとも一つの処理部に、車両である自車の後方を走行する後方車の存在を把握し、自動運転機能によって車両が渋滞中を走行する自動走行期間にて、把握する後方車の状況に応じて、ドライバに許可される運転以外の特定行為の許容範囲を変更する、ことを含む処理を実行させる提示制御プログラムとされる。
これらの態様では、自動運転機能によって渋滞中を走行するとき、自車の後方を走行する後方車の状況に応じて、ドライバに許可される特定行為の許容範囲が変更される。故に、後方からの追突のリスクがあるとき、許容範囲の変化により、不安を感じ易い特定行為が不許可とされ得る。その結果、自動運転機能によって渋滞中を走行するとき、ドライバに不安を与え難くなる。
尚、上記及び請求の範囲における括弧内の参照番号は、後述する実施形態における具体的な構成との対応関係の一例を示すものにすぎず、技術的範囲を何ら制限するものではない。
以下、本開示の複数の実施形態を図面に基づいて説明する。尚、各実施形態において対応する構成要素には同一の符号を付すことにより、重複する説明を省略する場合がある。各実施形態において構成の一部分のみを説明している場合、当該構成の他の部分については、先行して説明した他の実施形態の構成を適用することができる。また、各実施形態の説明において明示している構成の組み合わせばかりではなく、特に組み合わせに支障が生じなければ、明示していなくても複数の実施形態の構成同士を部分的に組み合わせることができる。そして、複数の実施形態及び変形例に記述された構成同士の明示されていない組み合わせも、以下の説明によって開示されているものとする。
(第一実施形態)
本開示の第一実施形態による提示制御装置の機能は、図1に示すHCU(Human Machine Interface Control Unit)100によって実現されている。図1~図3に示すように、HCU100は、車両Amにおいて用いられるHMI(Human Machine Interface)システムを、複数の表示デバイス、オーディオ装置24及び操作デバイス26等と共に構成している。HMIシステムは、車両Amの乗員(例えばドライバ等)による操作を受け付ける入力インターフェース機能と、ドライバへ向けて情報を提示する出力インターフェース機能とを備えている。
本開示の第一実施形態による提示制御装置の機能は、図1に示すHCU(Human Machine Interface Control Unit)100によって実現されている。図1~図3に示すように、HCU100は、車両Amにおいて用いられるHMI(Human Machine Interface)システムを、複数の表示デバイス、オーディオ装置24及び操作デバイス26等と共に構成している。HMIシステムは、車両Amの乗員(例えばドライバ等)による操作を受け付ける入力インターフェース機能と、ドライバへ向けて情報を提示する出力インターフェース機能とを備えている。
HCU100は、車両Amに搭載された車載ネットワーク1の通信バス99に、通信可能に接続されている。HCU100は、車載ネットワーク1に設けられた複数のノードのうちの一つである。通信バス99には、ドライバモニタ29、周辺監視センサ30、ロケータ35、ナビゲーション(Electronic Control Unit)ECU38、走行制御ECU40、運転支援ECU50a及び自動運転ECU50b等が接続されている。車載ネットワーク1の通信バス99に接続されたこれらのノードは、相互に通信可能である。これら装置及びECUのうちの特定ノード同士は、相互に直接的に電気接続され、通信バス99を介することなく通信を実施可能であってよい。
ドライバモニタ29は、近赤外光源及び近赤外カメラと、これらを制御する制御ユニットとを含む構成である。ドライバモニタ29は、運転席のヘッドレスト部分に近赤外カメラを向けた姿勢にて、例えばステアリングコラム部の上面又はインスツルメントパネル9の上面等に設置されている。近赤外カメラは、後述するメータディスプレイ21又はセンターインフォメーションディスプレイ(以下、CID)22と一体的に構成され、いずれかの画面に設けられていてもよい。
ドライバモニタ29は、近赤外光源によって近赤外光を照射されたドライバの頭部を、近赤外カメラによって撮影する。近赤外カメラによる撮像画像は、制御ユニットによって画像解析される。制御ユニットは、ドライバのアイポイントの位置及び視線方向等の情報を撮像画像から抽出し、抽出したドライバの状態情報を、通信バス99を通じて、HCU100等に提供する。
周辺監視センサ30は、車両Amの周辺環境を監視する自律センサである。周辺監視センサ30は、自車周囲の検出範囲から予め規定された移動物体及び静止物体を検出可能である。周辺監視センサ30は、自車の周囲を走行する前方車両(図4 前走車Af参照)、後方車両、前後の側方車両(図4 隣接車Ad参照)等を少なくとも検出可能である。周辺監視センサ30は、車両周囲の物体の検出情報を、通信バス99を通じて、運転支援ECU50a及び自動運転ECU50b等に提供する。
周辺監視センサ30には、例えばカメラユニット31及びミリ波レーダ32が含まれている。カメラユニット31は、単眼カメラを含む構成であってもよく、又は複眼カメラを含む構成であってもよい。カメラユニット31は、車両Amの前方範囲、側方範囲及び後方範囲等を撮影可能なように車両Amに搭載されている。カメラユニット31は、車両周囲を撮影した撮像データ及び撮像データの解析結果の少なくとも一方を、検出情報として出力する。ミリ波レーダ32は、ミリ波又は準ミリ波を自車周囲へ向けて照射する。ミリ波レーダ32は、移動物体及び静止物体等で反射された反射波を受信する処理によって生成した検出情報を出力する。周辺監視センサ30は、ライダ及びソナー等の検出構成をさらに備えていてもよい。
ロケータ35は、GNSS(Global Navigation Satellite System)受信器及び慣性センサ等を含む構成である。ロケータ35は、GNSS受信器で受信する測位信号、慣性センサの計測結果、及び通信バス99に出力された車速情報等を組み合わせ、車両Amの自車位置及び進行方向等を逐次測位する。ロケータ35は、測位結果に基づく車両Amの位置情報及び方角情報を、ロケータ情報として、通信バス99に逐次出力する。
ロケータ35は、地図データベース36をさらに有している。地図データベース36は、多数の3次元地図データ及び2次元地図データを格納した大容量の記憶媒体を主体とする構成である。3次元地図データは、いわゆる高精度地図データであり、道路の3次元形状情報及び各レーンの詳細情報等、高度運転支援及び自動運転に必要な情報を含んでいる。ロケータ35は、現在位置周辺の地図データを地図データベース36から読み出し、運転支援ECU50a及び自動運転ECU50b等に、ロケータ情報と共に提供する。
ナビゲーションECU38は、ロケータ35より取得するロケータ情報に基づき、車両Amの現在位置を把握する。ナビゲーションECU38は、現在位置から、ドライバ等によって設定された目的地までの経路を設定する。ナビゲーションECU38は、目的地までの設定経路を示す経路情報を、HCU100に提供する。ナビゲーションECU38は、HMIシステムと連携し、目的地までの経路案内として、画面表示及び音声メッセージ等を組み合わせ、交差点及び分岐ポイント等にて車両Amの進行方向をドライバに通知する。
尚、スマートフォン等のユーザ端末等が、車載ネットワーク1又はHCU100に接続されていてもよい。こうしたユーザ端末が、ロケータ35に替わって、位置情報、方角情報及び地図データ等を運転支援ECU50a及び自動運転ECU50bに提供してもよい。またユーザ端末が、ナビゲーションECU38に替わって、目的地までの経路情報を、HCU100に提供してもよい。詳記すると、ユーザ端末にて実行されるアプリケーションには、ドライバ等のユーザ操作に基づき、目的地までの経路が設定される。ユーザ端末は、画面表示及び音声メッセージ等を組み合わせて、交差点及び分岐ポイント等にて、車両Amの進行方向を案内可能である。ユーザ端末は、アプリケーションにて設定された目的地までの経路情報を、HCU100に提供できる。
走行制御ECU40は、マイクロコントローラを主体として含む電子制御装置である。走行制御ECU40は、ブレーキ制御ECU、駆動制御ECU及び操舵制御ECUの機能を少なくとも有している。走行制御ECU40は、ドライバの運転操作に基づく操作指令、運転支援ECU50aの制御指令及び自動運転ECU50bの制御指令のいずれか一つに基づき、各輪のブレーキ力制御、車載動力源の出力制御及び操舵角制御を継続的に実施する。加えて走行制御ECU40は、各輪のハブ部分に設けられた車輪速センサ41の検出信号に基づき、車両Amの現在の走行速度を示す車速情報を生成し、通信バス99に逐次出力する。
運転支援ECU50a及び自動運転ECU50bは、自動運転システム50を構成する車載ECUとして車両Amに搭載されている。自動運転システム50の搭載により、車両Amは、自動運転機能を備えた自動運転車両となる。
運転支援ECU50aは、ドライバの運転操作を支援する運転支援機能を実現させる車載ECUである。運転支援ECU50aは、米国自動車技術会の規定する自動運転レベルにおいて、レベル2程度の高度運転支援又は部分的な自動走行制御を可能にする。運転支援ECU50aは、処理部、RAM、記憶部、入出力インターフェース及びこれらを接続するバス等を備えた制御回路を主体として含むコンピュータである。運転支援ECU50aは、処理部によるプログラムの実行により、高度運転支援を実現する複数の機能部を有する。具体的に、運転支援ECU50aは、ACC(Adaptive Cruise Control)機能部、LTA(Lane Tracing Assist)機能部及びLCA(Lane Change Assist)機能部を有する。
自動運転ECU50bは、ドライバの運転操作を代行可能な自動運転機能を実現させる車載ECUである。自動運転ECU50bは、予め設定された運行設計領域(Operational Design Domain,ODD)に限り、システムが制御主体となるレベル3以上の自律走行を可能にする。自動運転ECU50bによる自律走行制御は、車両Amが使用される国又は地域の法規等に対応とされ、ドライバの目視による車両周辺の監視が不要なアイズオフの自動運転を可能にしている。自動運転ECU50bは、特定の自動運転可能エリア内にてレベル3の自動走行を許可するエリア限定レベル3の自動運転と、渋滞中を走行する場合にレベル3の自動走行を許可する渋滞時レベル3の自動運転等を実施可能である。尚、自動運転ECU50bは、レベル4以上の自動運転機能を実現可能であってもよい。
自動運転ECU50bは、処理部51、RAM52、記憶部53、入出力インターフェース54及びこれらを接続するバス等を備えた制御回路を主体として含むコンピュータである。自動運転ECU50bは、運転支援ECU50aよりも高い演算能力を備えており、ACC、LTA及びLCAに相当する走行制御を少なくとも実施できる。自動運転ECU50bは、処理部51によるプログラムの実行により、車両Amの自動運転を実現する複数の機能部として、環境認識部61、行動判断部62及び操作実行部63を有する。
環境認識部61は、ロケータ35より取得するロケータ情報及び地図データと、周辺監視センサ30より取得する検出情報とに基づき、車両Amの走行環境を認識する。具体的に、環境認識部61は、複数レーンのうちで自車が走行する自車レーンの位置、自車レーンのレーン形状、並びに自車周囲の他車両の相対位置及び相対速度等を把握する。尚、自車レーンの位置の特定は、ロケータ35にて実施されてもよい。また、環境認識部61による走行環境の認識結果は、認識情報としてHCU100に提供される。
行動判断部62は、環境認識部61による走行環境の認識結果に基づき、車両Amを走行させる予定走行ラインを生成する。行動判断部62は、ナビゲーションECU38にて生成される経路情報に基づき、目的地へ向かうための最適な予定走行ラインを逐次生成する。例えば行動判断部62は、本線車道から離脱する分岐ポイントが設定経路にある場合、経路上となる分岐先のレーン(以下、経路レーンLnr 図7参照)へ向けて車線変更を行うような予定走行ラインを生成する。
操作実行部63は、走行制御ECU40との連携により、行動判断部62にて生成された予定走行ラインに従って、車両Amの加減速制御及び操舵制御等を実行する。具体的に、操作実行部63は、予定走行ラインに基づく制御指令を生成し、走行制御ECU40へ向けて逐次出力する。
次に、HMIシステムに含まれる複数の表示デバイス、オーディオ装置24、操作デバイス26及びHCU100の各詳細を順に説明する。
複数の表示デバイスには、メータディスプレイ21、CID22、ヘッドアップディスプレイ(以下、HUD)23及び等が含まれている。複数の表示デバイスには、電子ミラーシステムの各ディスプレイEMB,EML,EMRがさらに含まれていてもよい(図2参照)。メータディスプレイ21、CID22及びHUD23は、ドライバの視覚を通じて情報を提示する。
メータディスプレイ21及びCID22は、例えば液晶ディスプレイ又はOLED(Organic Light Emitting Diode)ディスプレイ等を主体とする構成である。メータディスプレイ21及びCID22は、HCU100から取得する制御信号及び映像データに基づき、種々の画像を表示画面に表示させる。メータディスプレイ21は、例えば運転席の正面に設置されている。CID22は、インスツルメントパネル9の中央部に設置されている。CID22は、一例として、10インチ以上の縦長のディスプレイとされる。CID22の表示画面は、曲面状に湾曲していてもよい。さらに、CID22の表示画面は、メータディスプレイ21の表示画面と連続していてもよい。CID22は、タッチパネルの機能を有しており、例えばドライバ等による表示画面へのタッチ操作、具体的には、タップ、フリック、ピンチ及びスワイプ等の操作等を検出する。
HUD23は、HCU100から取得する制御信号及び映像データに基づき、ドライバ前方に結像される画像の光を、ウィンドシールドWS等に規定された投影領域PAに投影する。ウィンドシールドWSにて車室内側に反射された画像の光は、運転席に着座するドライバによって知覚される。こうしてHUD23は、投影領域PAよりも前方の空間中に虚像を表示させる。ドライバは、HUD23によって表示される画角VA内の虚像を、車両Amの前景と重ねて視認する。
オーディオ装置24は、運転席を囲む配置にて車室内に設置された複数のスピーカを有している。オーディオ装置24は、HCU100から取得する制御信号及び音声データに基づき、報知音又は音声メッセージ等をスピーカによって車室内に再生させる。オーディオ装置24は、ドライバの聴覚を通じて情報を提示する。
操作デバイス26は、ドライバ等によるユーザ操作を受け付ける入力部である。操作デバイス26には、例えば自動運転機能の作動及び停止に関連するユーザ操作等が入力される。ステアリングホイールのスポーク部に設けられたステアスイッチ、ステアリングコラム部に設けられた操作レバー、及びドライバの発話内容を認識する音声入力装置等が、操作デバイス26に含まれる。
HCU100は、HMIシステムにおいて、メータディスプレイ21、CID22、HUD23及びオーディオ装置24を制御する車載コンピュータである。HCU100は、ドライバへ向けた情報提示を統合的に管理する提示制御装置として機能する。HCU100は、処理部11、RAM12、記憶部13、入出力インターフェース14及びこれらを接続するバス等を備えた制御回路を主体として含む構成である。
処理部11は、RAM12と結合された演算処理のためのハードウェアである。処理部11は、CPU(Central Processing Unit)及びGPU(Graphics Processing Unit)等の演算コアを少なくとも一つ含む構成である。処理部11は、FPGA(Field-Programmable Gate Array)、NPU(Neural network Processing Unit)及び他の専用機能を備えたIPコア等をさらに含む構成であってよい。RAM12は、映像データ生成のためのビデオRAMを含む構成であってよい。処理部11は、RAM12へのアクセスにより、本開示の提示制御方法を実現するための種々の処理を実行する。記憶部13は、不揮発性の記憶媒体を含む構成である。記憶部13には、処理部11によって実行される種々のプログラム(提示制御プログラム等)が格納されている。
HCU100は、記憶部13に記憶された提示制御プログラムを処理部11によって実行することで、各表示デバイス及びオーディオ装置24を用いたドライバへの情報提示を統合制御する複数の機能部を有する。具体的に、HCU100には、情報取得部71及び提供制御部77等の機能部が構築される。
情報取得部71は、車両Amの状態を示す車両情報を、通信バス99から取得する。車両情報には、例えば車速情報、自動運転機能の状態を示すステータス情報、及び環境認識部61による車両周囲の走行環境を認識した認識情報が含まれる。情報取得部71は、ユーザ操作の内容を示す操作情報を、CID22及び操作デバイス26等から取得する。情報取得部71は、ドライバの状態情報を、ドライバモニタ29から取得する。
加えて情報取得部71は、ナビマップMP(図9等参照)の生成に必要なロケータ情報、地図データ及び経路情報等を取得する。尚、ナビマップMPの映像データは、ナビゲーションECU38にて所定の解像度で生成され、情報取得部71に提供されてもよい。
また情報取得部71は、動画コンテンツCTV(図9等参照)等、エンターテイメント系の表示に必要なコンテンツデータ(動画ファイル等)を取得する。コンテンツデータは、車両Amに搭載されたテレビチューナ、HCU100に電気的に接続された外部メディア、及びHCU100とペアリングされたスマートフォン等のユーザ端末により、情報取得部71に提供される。
提供制御部77は、各表示デバイス及びオーディオ装置24を用いたドライバへの情報の提供を統合制御する。提供制御部77は、各表示デバイスに表示させる各コンテンツの表示サイズ及び表示レイアウトを、各コンテンツに設定された優先度に応じて変更可能である。一例として、提供制御部77は、優先度の高いコンテンツほど、表示サイズを大きくするか、又は見た目上での画面手前側に表示させる。
具体的に、提供制御部77は、ドライバへ向けて提示する情報を調停する調停機能と、調停結果に基づき映像データ及び音声データを生成するデータ生成機能とを有している。提供制御部77は、調停機能として、情報取得部71にて取得される種々の取得情報に基づき、提供候補となる各コンテンツに、上述の優先度を設定する。提供制御部77は、優先度が高いと判断したコンテンツを、ドライバへの提供対象に選定する。提供制御部77は、データ生成機能として、コンテンツの選定結果に基づき、各表示デバイスに提供する制御信号及び映像データと、オーディオ装置24に提供する制御信号及び音声データとを生成する。提供制御部77は、生成した制御信号、映像データ及び音声データ等を、各提示デバイスへ向けて逐次出力する。
ここまで説明した自動運転ECU50b及びHCU100は、ドライバによる運転以外の行為の実施を一時的に許容する。詳しく説明すると、自動運転ECU50bによるレベル3の自動運転機能によって車両Amが自動走行する自動走行期間にて、ドライバには、運転以外の行為であって、予め規定された特定行為(以下、セカンドタスク)が許可され得る。この場合のドライバは、限定領域から出るとき又は緊急時において、自動運転システム50から運転の制御権を引き継ぐ者(搭乗者)である。自動運転システム50による運転操作の実施要求、即ち、運転交代の要請(Take Over Request)が発生するまで、ドライバには、セカンドタスクの実施が法規的に許可され得る。
セカンドタスクは、セカンダリアクティビティ又はアザーアクティビティ等と呼ばれ得る。セカンドタスクは、自動運転システム50からの運転操作の引き継ぎ要求にドライバが対応することを妨げてはならないとされる。例えば、動画コンテンツCTV(図9参照)等のエンターテイメント系のコンテンツの視聴、スマートフォン等の操作、及び食事等の行為が、セカンドタスクとして想定される。
セカンドタスクをドライバが実施している場合、ドライバの注意は、運転操作から離れている。故に、セカンドタスクの実施中、自動運転ECU50bによる自動運転での挙動変化に、ドライバは、不安を抱き易くなる。一例として、車両Amが渋滞中を走行している場合、渋滞の状況によっては、他車両の割り込みが多く発生する。こうしたシーンでは、自動運転機能が正常に動作していても、ドライバは、他車両の割り込みに対応する車両Amの挙動変化に、不安に感じる可能性がある。
HCU100には、渋滞区間を自動走行中にドライバのセカンドタスクの実施を管理する複数の機能部が、提示制御プログラムに基づき、さらに構築される。具体的に、HCU100は、渋滞判定部72、割込予測部73、割込判定部74及び統合状態推定部75を、さらに有する。
渋滞判定部72は、自動運転機能によって車両Amが走行する自動走行期間にて、渋滞中か否かを判定する。渋滞判定部72は、情報取得部71にて取得される車速情報、地図データ、経路情報、及び車両周囲の認識情報等に基づき、車両Am(以下、自車とも記載)が渋滞に巻き込まれた状態か否かを判定する。一例として、渋滞判定部72は、自車の走行速度が予め規定された渋滞判定閾値(例えば、10km/h)以下であり、且つ、自車の前方に前走車Afが存在する場合に、渋滞中であると判定する。前走車Afは、渋滞時にて常識的な車間距離(例えば、数m~十数m程度)を確保しつつ、自車が追従する前方の他車両である。渋滞判定部72は、渋滞判定後、自車の走行速度が予め規定された渋滞解消閾値(例えば、50km/h)を超えた場合に、渋滞が解消したと判定する。
加えて渋滞判定部72は、自車の周囲が渋滞中であると判定する場合に、自車周囲の渋滞パターンをさらに判別する。渋滞判定部72は、予め設定された渋滞パターンA~D(図4~図7参照)のうちで、現在の自車周囲の渋滞が該当する渋滞パターンを特定する。
図4に示す渋滞パターンAは、3レーン以上を含んだ道路において、自車が中央レーンLn2を走行していることを前提としている。中央レーンLn2は、右端レーンLn3及び左端レーンLn1を除いたレーンである。複数の中央レーンLn2が道路に存在していてもよい。渋滞パターンAは、中央レーンLn2を走行する自車の前方及び左右の両側方に他車両が存在している渋滞パターンである。渋滞判定部72は、自車の走行速度が渋滞判定閾値以下であり、且つ、前走車Af及び左右の隣接車Adが全て検出されている場合に、パターンAの渋滞であると判別する。
尚、隣接車Adの有無を判定する検出範囲には、自車の側方だけでなく、自車の前側方及び後側方が僅かに(例えば、5m程度)含まれていてもよい。さらに、隣接車Adの検出範囲は、一定であってもよく、又は走行速度に応じて調整されてもよい。
図5に示す渋滞パターンBは、複数レーンを含んだ道路において、自車が右端レーンLn3又は左端レーンLn1を走行していることを前提としている。渋滞パターンBは、自車の前方に前走車Afが存在しており、且つ、隣接する中央レーンLn2に隣接車Adが存在している渋滞パターンである。渋滞判定部72は、自車の走行速度が渋滞判定閾値以下であり、且つ、前走車Af及び隣接車Adが共に検出されている場合に、パターンBの渋滞であると判別する。
図6に示す渋滞パターンCは、複数レーンのうちで、自車の走行する自車レーンのみが渋滞している渋滞パターンである。渋滞判定部72は、自車の走行速度が渋滞判定閾値以下であり、前走車Afが検出されており、且つ、隣接車Adが検出されていない場合に、パターンCの渋滞であると判定する。
図7に示す渋滞パターンDは、経路情報に基づき特定される経路レーンLnr(ドット範囲参照)のみが渋滞している渋滞パターンである。渋滞判定部72は、自車の走行速度が渋滞判定閾値以下であり、且つ、経路レーンLnrを走行する自車の前方に前走車Afが検出されている場合に、パターンDの渋滞であると判定する。
以上の渋滞判定部72にて実施される渋滞判定処理の詳細を、図8に基づき、図4~図7を参照しつつ、以下説明する。渋滞判定部72は、自動運転ECU50bによる自動走行開始を示すステータス情報の取得に基づき、渋滞判定処理を開始する。渋滞判定部72は、自動運転ECU50bによる自動走行が終了されるまで、渋滞判定処理を所定の周期で繰り返し開始する。
S101では、最新の車速情報に基づき、自車の走行速度が渋滞判定閾値以下であるか否かを判定する。S101にて、走行速度が渋滞判定閾値を超えていると判定した場合、S102に進む。S102では、自車の周囲が渋滞中ではないと判定(非渋滞判定)し、今回の渋滞判定処理を終了する。
一方、S102にて、走行速度が渋滞判定閾値以下であると判定した場合、S103に進む。S103では、自車の前方を走行する前走車Afの有無を判定する。S103にて、前走車Afが検出されていないと判定した場合、S102に進み、非渋滞判定を行う。一方で、S103にて、前走車Afが検出されていると判定した場合、S104に進む。
S104では、隣接車Adの有無を判定する。S104にて、隣接レーンの全てで隣接車Adが検出されていると判定した場合、S105に進む。S105では、自車の周囲が渋滞中であると判定(渋滞判定)すると共に、渋滞パターンを判別し、S109に進む。S105では、自車レーンの位置に応じて、渋滞パターンA又は渋滞パターンBであると判別する。
S104にて、隣接車Adが検出されない隣接レーンがあると判定すると、S106に進む。S106では、経路情報に基づき、自車レーンが経路レーンLnrであるか否かを判定する。S106にて、走行中の自車レーンが経路レーンLnrではないと判定した場合、S107に進む。S107では、自車レーンの渋滞判定を行うと共に、渋滞パターンCの渋滞中であると判別し、S109に進む。
一方、S106にて、自車レーンが経路レーンLnrであり、経路レーンLnrの混雑を判定した場合、S108に進む。S108では、経路レーンLnrの渋滞判定を行うと共に、渋滞パターンDの渋滞中であると判別し、S109に進む。
S109では、最新の車速情報に基づき、自車の走行速度が渋滞解消閾値を超えたか否かを判定する。S109にて、走行速度が渋滞解消閾値以下であると判定した場合、S104に戻る。一方、S109にて、走行速度が渋滞解消閾値を超えたと判定した場合、今回の渋滞判定処理を終了する。
図3に示す割込予測部73は、隣接車Adによる自車前方への割り込みの実施予兆を検知することにより、割り込み発生を予測する。一例として、割込予測部73は、環境認識部61の認識情報、又はカメラユニット31の撮像データの解析結果に基づき、隣接車Adの自車レーン側の方向指示器(ウィンカー)が点滅しているか否かを判定する。割込予測部73は、隣接車Adの自車レーン側の方向指示器が点滅している場合、この方向指示器の作動を割り込みの実施予兆として検知する。また別の一例として、割込予測部73は、ブラインドスポットモニタによる隣接レーンの他車両の検出情報を取得してもよい。この場合、自車と速度差のある隣接車Adの接近が、自車前方への割り込みの実施予兆として検知される。
また割込予測部73は、隣接レーン及び自車レーン間の区画線へ向けてレーン内でオフセットさせる隣接車Adの横移動を、割り込みの実施予兆として検知してもよい。さらに、隣接車Adが自動運転機能を搭載している場合、割込予測部73は、隣接車Adとの車車間通信により、隣接車Adの予定走行ラインを取得してもよい。この場合、割込予測部73は、自車レーンへの車線変更を予定する隣接車Adの予定走行ラインから、割り込みの実施予兆を検知できる。
割込判定部74は、隣接車Adによる自車前方への割り込みが実際に実施されているか否かを判定する。一例として、割込判定部74は、環境認識部61による認識結果、又はカメラユニット31の撮像データの解析結果に基づき、隣接車Adが自車レーンに進入したか否かを判定する。割込判定部74は、隣接車Adの少なくとも一部が、隣接レーン及び自車レーン間の区画線を越えて自車レーンに進入した場合、隣接車Adの割り込みが実施されていると判定する。加えて、割込判定部74は、自車レーンへ向かう隣接車Adの横移動速度が所定の速度を超えた場合に、隣接車Adが割り込みを実施中であると判定してもよい。
ここで、渋滞判定部72による渋滞判定処理、割込予測部73による予兆検知に基づく割り込み予測処理、及び割込判定部74による割り込み実施中の判定処理、の一部又は全部が、自動運転システム50によって実施されてもよい。こうした形態では、渋滞判定部72、割込予測部73及び割込判定部74は、情報取得部71と連携し、自動運転システム50の処理結果を示す情報を取得する。即ち、渋滞判定部72は、自動走行期間にて、自動運転システム50からの取得情報に基づき、渋滞中か否かを判定する。同様に、割込予測部73は、自動運転システム50からの取得情報に基づき、隣接車Adによる割り込みの実施予兆を検知する。また割込判定部74は、自動運転システム50からの取得情報に基づき、隣接車Adによる割り込みが実施されているか否かを判定する。
統合状態推定部75は、ドライバモニタ29にて生成されたドライバの状態情報を情報取得部71から取得する。統合状態推定部75は、少なくとも自動走行期間において、ドライバが実施しているセカンドタスクの種別を判別する。具体的に、統合状態推定部75は、予め想定された複数種類のセカンドタスクの種別の中で、ドライバが現在実施しているセカンドタスクを特定する。
例えば、映画及びオーディオブック等のコンテンツの視聴、テレビの視聴、スマートフォン等の使用、及びこれら以外の行為(食事等)等が、セカンドタスクとして予め想定されている。統合状態推定部75は、提供制御部77によるコンテンツの再生情報、及びスマートフォン等から送信される操作情報等を参照し、ドライバモニタ29の状態情報と組み合わせて、実施中のセカンドタスクを選択する。統合状態推定部75は、例えば機械学習等によって生成された判定器(判定ロジック)等を用いて、近赤外カメラによる撮像画像から、ドライバの実施するセカンドタスクを推定可能であってもよい。
尚、ドライバの実施するセカンドタスクを特定する処理は、ドライバモニタ29にて実施されてもよい。こうした形態であれば、統合状態推定部75は、ドライバモニタ29にて生成されたセカンドタスクの種類を示す情報を、通信バス99及び情報取得部71を通じて取得する。
提供制御部77は、セカンドタスクの実施が許可された自動走行期間にて、セカンドタスクに関連して提供される動画コンテンツCTV(図9参照)等の提供方法を、自車の走行環境に応じて制御する。提供制御部77は、渋滞判定部72にて自車の周囲が渋滞中であると判定されると、渋滞パターン及び隣接車Adの挙動に応じて、CID22によるエンターテイメント系のコンテンツ等の提供を制限する。
具体的に、提供制御部77は、セカンドタスクの実施が許可された自動走行期間にて、動画コンテンツCTV等のエンターテイメント系のコンテンツを含んだセカンドタスクモードの映像を、CID22の画面に表示させる。一例として、セカンドタスクモードの表示には、動画コンテンツCTV及びナビマップMPが含まれている。セカンドタスクモードでは、CID22の画面が上下2つの画面領域に分けられている。動画コンテンツCTVは、ドライバから視認され易いように、上側の画面領域(以下、メイン表示域DA1)に表示される。一方、ナビマップMPは、下側の画面領域(以下、サブ表示域DA2)に表示される。
尚、セカンドタスクモードにて、動画コンテンツCTV等と共に表示される表示物は、適宜変更されてよい。またセカンドタスクモードでは、CID22の画面全体に、動画コンテンツCTVが表示されてもよい。さらに、セカンドタスクモードにおいて表示される内容は、ドライバ等により予め設定可能であってよい。
提供制御部77は、渋滞判定部72、割込予測部73及び割込判定部74の提供情報等に基づき、セカンドタスクモードを複数のうちで切り替えることで、動画コンテンツCTVの表示を制限する。具体的に、図9に示すセカンドタスクモードDMnは、動画コンテンツCTVの表示が制限されていない場合の表示モードである。こうした制限なしのセカンドタスクモードDMnでは、動画コンテンツCTVは、メイン表示域DA1に通常表示される。一方で、図10~図12に示す各セカンドタスクモードDMr1~DMr3は、動画コンテンツCTV等のエンターテイメント系のコンテンツ表示に制限が加えられている。
図10に示すセカンドタスクモードDMr1は、動画コンテンツCTVの表示に弱い制限が加えられた場合の表示モードである。提供制御部77は、渋滞判定部72による渋滞パターンの判別結果を参照し、特定パターンの渋滞中か否かを判定する。ここで、渋滞パターンC及び渋滞パターンDでは、自車レーンへの移動を望む隣接車Adの強引な割り込みが発生し易くなる。そのため提供制御部77には、渋滞パターンC及び渋滞パターンDが、自車前方への割り込みが発生し易い特定パターンの渋滞として登録されている。提供制御部77は、渋滞判定部72による判別結果が渋滞パターンC又は渋滞パターンDを示す場合、特定パターンの渋滞中であると判定し、セカンドタスクモードDMr1に設定する。
セカンドタスクモードDMr1では、メイン表示域DA1に、割込可能性通知MWiが表示される。割込可能性通知MWiは、例えば「前方への割り込みに注意してください」等の注意喚起のメッセージを含む表示物である。割込可能性通知MWiは、メイン表示域DA1の上縁近傍に、横長の帯状に表示される。割込可能性通知MWiは、メイン表示域DA1の動画コンテンツCTVの一部に重ねられている。故に、動画コンテンツCTVの大部分は、割込可能性通知MWiに隠されることなく表示される。加えて、割込可能性通知MWiが表示されても、動画コンテンツCTVの映像及び音声の再生は、継続される。そのため、ドライバによる動画コンテンツCTVの視聴は、割込可能性通知MWiの追加表示によって実質的に妨げられることなく、継続され得る。
図11に示すセカンドタスクモードDMr2は、動画コンテンツCTVの表示に中程度の制限が加えられた場合の表示モードである。提供制御部77は、割込予測部73による割り込み実施予兆の検知結果を参照し、割り込みの実施予兆が検知されていた場合に、CID22の表示モードをセカンドタスクモードDMr2に設定する。セカンドタスクモードDMr2では、セカンドタスクモードDMr1よりも、動画コンテンツCTVの表示の制限が強められている。このように、提供制御部77は、割込予測部73にて割り込みの実施予兆が検知された場合、渋滞判定部72にて特定パターンの渋滞中であると判定された場合よりも、動画コンテンツCTVの表示を制限する。
セカンドタスクモードDMr2では、メイン表示域DA1に、割込予測通知MWfが表示される。割込予測通知MWfは、例えば「前方への割り込みがあります」等の注意喚起のメッセージを含む表示物である。割込予測通知MWfによる注意喚起は、割込可能性通知MWi(図10参照)による注意喚起よりも、強い内容とされ、割り込み発生の可能性が高まっていることをドライバに認識させる。
割込予測通知MWfは、割込可能性通知MWiと同様に、動画コンテンツCTVの一部と重なるように、メイン表示域DA1の上縁近傍に横長の帯状に表示される。割込予測通知MWfの縦幅は、割込可能性通知MWiの縦幅よりも広くされている。故に、セカンドタスクモードDMr2での動画コンテンツCTVの表示面積は、セカンドタスクモードDMr1(図10参照)での動画コンテンツCTVの表示面積よりも狭くなる。以上のように、セカンドタスクモードDMr2では、動画コンテンツCTVの表示制限の強化が、表示面積の減少によって実現されている。一方で、割込予測通知MWfによって隠されていても、動画コンテンツCTVの大部分は、ドライバから視認可能である。加えて、割込予測通知MWfが追加表示されても、動画コンテンツCTVの映像及び音声の再生は、継続される。故に、ドライバによる動画コンテンツCTVの視聴は、セカンドタスクモードDMr2でも、概ね支障なく継続され得る。
図12に示すセカンドタスクモードDMr3は、動画コンテンツCTVの表示に強い制限が加えられた場合の表示モードである。提供制御部77は、割込判定部74による割り込み実施の判定結果を参照し、隣接車Adが割り込みを実施中である場合に、セカンドタスクモードDMr3に設定する。セカンドタスクモードDMr3では、各セカンドタスクモードDMr1,DMr2よりも動画コンテンツCTVの表示制限が強められている。以上のように、提供制御部77は、割込判定部74にて隣接車Adが割り込みの実施中であると判定された場合、割込予測部73にて割り込みの実施予兆が検知された場合よりも、動画コンテンツCTVの表示を制限する。加えて提供制御部77は、割込判定部74にて隣接車Adが割り込みの実施中であると判定された場合、渋滞判定部72にて特定パターンの渋滞中であると判定された場合よりも、動画コンテンツCTVの表示を制限する。
セカンドタスクモードDMr3では、メイン表示域DA1に、割込発生中通知MWaが表示される。割込発生中通知MWaは、例えば「割り込み発生中」等の警告メッセージを含む表示物である。割込発生中通知MWaによる警告は、割込可能性通知MWi(図10参照)及び割込予測通知MWf(図11参照)による注意喚起よりも、強い内容とされる。
割込発生中通知MWaは、メイン表示域DA1の中央に、動画コンテンツCTVと重なるように表示される。割込発生中通知MWaは、動画コンテンツCTVと同様に横長の矩形状である。割込発生中通知MWaの表示面積は、割込可能性通知MWi及び割込予測通知MWfの各表示面積よりも広くされている。割込発生中通知MWaは、動画コンテンツCTVの中央に重ねて表示され、動画コンテンツCTVの大部分を覆い隠している。加えて、割込発生中通知MWaが表示されると、動画コンテンツCTVの映像及び音声の再生が中断される。以上のように、セカンドタスクモードDMr3では、動画コンテンツCTVの表示制限の強化が、表示面積の減少と再生中断とによって実現されている。その結果、ドライバによる動画コンテンツCTVの視聴は、システム側の判断で強制的に終了される。
以上の説明のように、セカンドタスクモードの切り替えにより、エンターテイメント系のコンテンツ表示制限を調整するコンテンツ制御処理の詳細を、図13に基づき、図9~図12を参照しつつ、以下説明する。提供制御部77は、動画コンテンツCTV等の再生開始を指示するユーザ操作、又は自動運転ECU50bによる自動走行開始を示すステータス情報の取得に基づき、コンテンツ制御処理を開始する。
S121では、CID22を動画コンテンツCTVの表示に制限のないセカンドタスクモードDMn(図9参照)に設定し、S122に進む。S122では、渋滞判定部72の渋滞判定の結果を参照し、自車の周囲が渋滞しているか否かを判定する。S122にて、渋滞中でないと判定した場合、S121に戻り、制限のないセカンドタスクモードDMnを継続させる。一方、S122にて、渋滞中であると判定した場合、S123に進む。
S123では、割込判定部74による判定結果を参照し、隣接車Adが自車の前方へ向けた割り込みの実施中であるか否かを判定する。S123にて、隣接車Adが割り込み実施中である判定した場合、S130に進む。S130では、動画コンテンツCTVの表示に強い制限がかけられたセカンドタスクモードDMr3(図12参照)に設定し、S131に進む。S130によれば、動画コンテンツCTVに割込発生中通知MWaがオーバーレイ表示される。一方、S123にて、隣接車Adが割り込み実施中ではないと判定した場合、S124に進む。
S124では、割込予測部73による判定結果を参照し、隣接車Adによる割り込みの実施予兆が検知されたか否か、即ち、割り込み予測の有無を判定する。S124にて、隣接車Adの割り込み予測がないと判定した場合、S125に進む。S125では、制限のないセカンドタスクモードDMn(図9参照)に設定し、S131に進む。一方、S124にて、隣接車Adの割り込み予測があると判定した場合、S126に進む。
S126では、渋滞判定部72による渋滞パターンの判別結果を参照し、自車が特定パターンの渋滞中であるか否かを判定する。S126にて、特定パターン以外(以下、非特定パターン)の渋滞中であると判定した場合、即ち、判別結果が渋滞パターンA又は渋滞パターンBを示す場合、S128に進む。S128では、動画コンテンツCTVの表示に弱い制限がかけられたセカンドタスクモードDMr1(図10参照)に設定し、S131に進む。S128によれば、割込可能性通知MWiがメイン表示域DA1の上縁に追加表示される。
S126にて、特定パターンの渋滞中であると判定した場合、即ち、判別結果が渋滞パターンC又は渋滞パターンDを示す場合、S127に進む。S127では、渋滞中における自車の走行速度が速度閾値(例えば、30km/h程度)を超えるか否かを判定する。S127にて、走行速度が速度閾値未満であり、自車が低速走行中(0~29km/h程度)であると判定した場合、S129に進む。S129では、動画コンテンツCTVの表示に中程度の制限がかけられたセカンドタスクモードDMr2(図11参照)に設定し、S131に進む。S129によれば、割込予測通知MWfがメイン表示域DA1の上縁に追加表示される。
S127にて、走行速度が速度閾値以上であり、自車が高速走行中(30~50km/h程度)であると判定した場合、S130にてセカンドタスクモードDMr3に設定し、S131に進む。
S131では、セカンドタスクモードを終了させるか否かを判定する。一例として、動画コンテンツCTVの表示を終了させるユーザ操作があった場合、S131では、セカンドタスクモードの終了判定を行う。また別の一例として、自動運転ECU50bによるレベル3の自動運転の終了又は中断を示すステータス情報が取得された場合、S131では、セカンドタスクモードの終了判定を行う。S131にて、セカンドタスクモードの継続を判定した場合、S122に戻り、ドライバへの動画コンテンツCTV等の提供を継続させる。以上により、例えば判別される渋滞パターンが非特定パターンから特定パターンに遷移した場合でも、セカンドタスクモードの切り替えにより、動画コンテンツCTVの表示制限を強める調整が実施される。
一方、S131にて、セカンドタスクモードを終了させると判定した場合、S132に進む。S132では、CID22の画面を、セカンドタスクモードから通常モードに切り替え、一連のコンテンツ制御処理を終了する。尚、通常モードのCID22には、ナビマップMPに加えて、車両Amのステータス表示及び後方カメラの映像等が表示されてよい。
図3に示す提供制御部77は、自動走行期間にてドライバに許可されるセカンドタスクの許容範囲を、渋滞判定部72の提供情報に基づき変更する。提供制御部77は、非特定パターンの渋滞中である場合、特定パターンの渋滞中である場合よりも、ドライバに許可されるセカンドタスクの許容範囲を広げる調整を行う。
詳しく説明すると、自動運転システム50からドライバへの運転交代には、システム側の判断でドライバに計画的に制御権を引き渡すハンドオーバーと、緊急性の高い状況でドライバが自らの判断で制御権を取得するオーバーライドとが存在する。実施中のセカンドタスクをドライバに中断させ、自動運転システム50からドライバに運転操作を引き継がせる運転交代は、ハンドオーバーに該当する。
ここで、CID22に表示される動画コンテンツCTVを単に視聴している場合、ドライバの両手は塞がっていない。そのためドライバは、ハンドオーバーのための運転交代の要請に速やかに対応できる。故に、動画コンテンツCTVの視聴を含むCID22の操作は、許可され易いセカンドタスクとなる。一方、ユーザ端末の操作及び食事を行っている場合、ドライバの両手又は片手が塞がった状態となる。そのためドライバは、ハンドオーバーのための運転交代の要請に速やかに対応し難くなる。故に、ユーザ端末の操作及び食事等の行為は、許可され難いセカンドタスクとなる。
以上の理由により、提供制御部77は、割り込み発生頻度の比較的少ない非特定パターンの渋滞中を自車が自動走行する場合、CID22の操作だけでなく、ユーザ端末の操作及び食事等の行為も、セカンドタスクの許容範囲に含める。対して、割り込み発生頻度の比較的多い特定パターンの渋滞中を自車が自動走行する場合、CID22の操作をセカンドタスクの許容範囲に含める一方で、ユーザ端末の操作及び食事等の行為を、セカンドタスクの許容範囲から除外する。
提供制御部77は、統合状態推定部75にて特定された実施中のセカンドタスクが許容範囲から外れた不許可な種別である場合のセカンドタスクモードDMaにて、図14に示すように、CID22のメイン表示域DA1に中断要求通知MWrを表示させる。中断要求通知MWrは、例えば「許可されていないタスクを実施しています」等の注意喚起のメッセージを含む表示物である。中断要求通知MWrは、メイン表示域DA1の上縁近傍に、動画コンテンツCTVの一部と重なるように、横長の帯状に表示される。加えて提供制御部77は、中断要求通知MWrの表示追加と共に、実施中のタスクの中断を要求する音声メッセージをオーディオ装置24によって再生させる。
以上の説明のように、セカンドタスクの許容範囲を制御する範囲制御処理、及びドライバ状態を監視して不許可なタスクの実施を注意喚起する状態監視処理の各詳細を、図15及び図16に基づき、図3及び図14を参照しつつ、以下説明する。提供制御部77は、自動運転ECU50bによる自動走行開始を示すステータス情報の取得に基づき、範囲制御処理及び状態監視処理を開始する。提供制御部77は、自動運転ECU50bによる自動走行が終了されるまで、範囲制御処理及び状態監視処理を所定の周期で繰り返し開始する。
図15に示す範囲制御処理のS141では、渋滞判定部72による渋滞パターンの判別結果を参照し、自車周囲の渋滞パターンを把握して、S142に進む。S142では、特定パターンの渋滞中か否かを判定する。S142にて、特定パターンの渋滞中であると判定した場合、即ち、判別結果が渋滞パターンC又は渋滞パターンDを示す場合、S143に進む。S143では、ユーザ端末の操作及び食事等の行為を不許可とするようにセカンドタスクの許容範囲を狭く設定し、今回の範囲制御処理を終了する。
一方、S142にて、非特定パターンの渋滞中であると判定した場合、即ち、判別結果が渋滞パターンA又は渋滞パターンBを示す場合、S144に進む。S144では、ユーザ端末の操作及び食事等の行為を許可とするようにセカンドタスクの許容範囲を広く設定し、今回の範囲制御処理を終了する。
図16に示す状態監視処理のS151では、範囲制御処理(図15参照)にて設定されたセカンドタスクの許可範囲を把握し、S152に進む。S152では、ドライバが現在実施しているセカンドタスクを把握し、S153に進む。S153では、S152にて把握した実施中のセカンドタスクが、S151にて把握した現在の許容範囲内か否かを判定する。S153にて、実施中のセカンドタスクが許容範囲内であると判定した場合、今回の状態監視処理を終了する。
一方、S153にて、実施中のセカンドタスクが許容範囲外であると判定した場合、S154に進む。S154では、実施中のセカンドタスクの中断要求をドライバへ向けて出力させて、今回の状態監視処理を終了する。S154によれば、CID22には、中断要求通知MWrが追加表示される(図14参照)。
ここまで説明した第一実施形態では、自動運転機能によって渋滞中を走行するとき、隣接車Adによる前方への割り込みの実施予兆が検知されると、ドライバに提供される動画コンテンツCTVの表示が制限される。故に、隣接車Adによる割り込み発生の予測が、提供中の動画コンテンツCTVに生じる表示変化により、ドライバに通知される。こうした通知によれば、自動運転機能によって渋滞中を走行するとき、ドライバに不安を与え難くなる。
詳記すると、隣接車Adの割り込みが発生すると、自動運転機能は、例えば隣接車Adとの距離を確保するような制動制御を実施する。こうした自車の挙動変化は、動画コンテンツCTVへ注意を向けており、自車周囲の状況を把握していないドライバに唐突に感じられてしまい、ドライバの不安の要因となり易い。故に、割り込みの実施予兆が検知された場合に、動画コンテンツCTVに表示変化を生じさせれば、ドライバは、自車に挙動変化が実際に発生する以前に、挙動変化の発生の可能性を予め認識できる。その結果、実際に割り込みが発生したとき、自車の挙動変化に対しドライバの感じる不安が軽減され得る。
加えて第一実施形態では、自動運転機能によって渋滞中を走行するとき、隣接車Adによる割り込みが発生し易い特定パターンの渋滞であると判定されると、ドライバに提供される動画コンテンツCTVの表示が制限される。故に、隣接車Adによる割り込み発生の可能性が、提供中の動画コンテンツCTVに生じる表示変化により、ドライバに通知され得る。こうした通知によれば、自動運転機能によって渋滞中を走行するとき、ドライバに不安を与え難くなる。
以上のように、割り込みが発生し易い特定パターンの渋滞である場合に、動画コンテンツCTVに表示変化を生じさせれば、ドライバは、自車に挙動変化が実際に発生する以前に、挙動変化が発生する可能性を予め認識できる。その結果、実際に割り込みが発生したとき、自車の挙動変化に対しドライバの感じる不安が軽減され得る。
また第一実施形態では、自動運転機能によって渋滞中を走行するとき、隣接車Adによる割り込みが発生し易い特定パターンの渋滞であると判定されると、ドライバに許可される特定行為の許容範囲が狭められる。故に、隣接車Adによる割り込み発生の可能性があるとき、許容範囲の変化により、不安を感じ易いセカンドタスクが不許可とされ得る。その結果、自動運転機能によって渋滞中を走行するとき、ドライバに不安を与え難くなる。
以上のように、割り込みが発生し易い特定パターンの渋滞である場合に、対応が難しくなるようなセカンドタスクを予め中断させておけば、ドライバは、自車に挙動変化が実際に発生する以前に、挙動変化が発生する可能性を予め認識できる。その結果、実際に割り込みが発生したとき、自車の挙動変化に対しドライバの感じる不安が軽減され得る。
さらに第一実施形態では、割込判定部74にて隣接車Adが割り込み実施中であると判定された場合、割込予測部73にて隣接車Adの割り込みの実施予兆が検知された場合よりも、動画コンテンツCTVの表示が制限される。
加えて第一実施形態では、割込判定部74にて隣接車Adが割り込み実施中であると判定された場合、渋滞判定部72にて特定パターンの渋滞中であると判定された場合よりも、動画コンテンツCTVの表示が制限される。
以上のように、動画コンテンツCTVの表示が強く制限されれば、ドライバの注意は、動画コンテンツCTVから離れて、自車周囲の状況に向き易くなる。その結果、ドライバは、隣接車Adの割り込みに起因する自車の挙動変化を予測できる。したがって、実際の挙動変化に対するドライバの不安が軽減され得る。
一方で、割り込みが実際に実施されていない場合、動画コンテンツCTVの表示制限を緩和することにより、ドライバは、自車周囲の状況に注意を向けつつ、動画コンテンツCTVの視聴を継続できる。その結果、ドライバの不安を軽減しつつ、煩わしく感じられ難い注意喚起が可能になる。
また第一実施形態では、渋滞判定部72にて特定パターンの渋滞中であると判定された場合の表示制限は、割込予測部73にて隣接車Adの割り込みの実施予兆が検知された場合の表示制限よりも弱くされる。以上によれば、ドライバの注意を自車周囲に向けさせつつ、動画コンテンツCTVの視聴を妨げないような注意喚起が実施され得る。
さらに第一実施形態では、提供制御部77にて、渋滞中の自車の走行速度が速度閾値を超えるか否かが判定される。そして、自車の走行速度が速度閾値を超える場合、走行速度が速度閾値未満の場合よりも、コンテンツの表示が制限される。このように、走行速度が高くなると、予兆検知に基づき注意喚起する時間の確保が難しくなる。故に、高速走行中に動画コンテンツCTVの表示制限を強める処理によれば、ドライバの注意を早期に自車周囲へ向けさせて、挙動変化の発生可能性を時間的な余裕を持ってドライバに認識させることが可能になる。
尚、上記実施形態では、動画コンテンツCTVが「コンテンツ」に相当し、提供制御部77が「提供制限部」に相当し、HCU100が「提示制御装置」に相当する。また上述したように、渋滞パターンA及び渋滞パターンBが「非特定パターン」の渋滞に相当し、渋滞パターンC及び渋滞パターンDが「特定パターン」の渋滞に相当する。
(第二実施形態)
図17~図35に示す本開示の第二実施形態は、第一実施形態の変形例である。第二実施形態では、車両Amが自動運転機能によって渋滞中を走行している場合に、車両Amの後方の状況が把握され、後方からの追突の予想に応じた動画コンテンツCTVの表示制限が実施される。
図17~図35に示す本開示の第二実施形態は、第一実施形態の変形例である。第二実施形態では、車両Amが自動運転機能によって渋滞中を走行している場合に、車両Amの後方の状況が把握され、後方からの追突の予想に応じた動画コンテンツCTVの表示制限が実施される。
図17に示す周辺監視センサ30は、自車の前方及び側方を検出するカメラユニット31及びミリ波レーダ32に加えて、自車の後方及び後側方を検出範囲とするカメラユニット31及びミリ波レーダ32をさらに有している。周辺監視センサ30は、自車の周囲を走行する他車両として、前走車Af及び隣接車Adに加えて、後方車Ab(図18参照)及び後側方車Abs(図18参照)を検出する。周辺監視センサ30は、カメラユニット31及びミリ波レーダ32に加えて、ライダ及びソナー等の検出構成を後方車Ab及び後側方車Absの検出に使用可能である。周辺監視センサ30は、自車後方の検出情報を自動運転システム50に提供する。
自動運転システム50の環境認識部61は、周辺監視センサ30による自車後方の検出情報に基づき、後方車Ab及び後側方車Absの相対位置及び相対速度等を把握する。環境認識部61は、後方車Abとして、自車に近接した位置で自車レーンを走行する近接後方車Ab1(図18参照)と、近接後方車Ab1よりも自車から離れた位置を走行する遠方後方車Ab2(図25参照)とを認識する。環境認識部61は、自車との車間距離及び相対速度(車間時間)等に基づき、近接後方車Ab1及び遠方後方車Ab2を区別する。一例として、近接後方車Ab1は、渋滞時に常識的な間隔(数m~十数m程度)を空けて自車に追従走行する他車両である。遠方後方車Ab2は、自車レーンを走行する他車両に限定されず、隣接レーンを走行する他車両であってもよい。自車から近接後方車Ab1及び遠方後方車Ab2までの各車間距離は、共に安定的となっている。環境認識部61は、自車よりも後方に位置し、自車に近接して隣接レーンを走行する他車両を後側方車Absとして認識する。環境認識部61は、後方車Ab及び後側方車Absの認識結果を、他の走行環境の認識結果と共にHCU100に提供する。
HCU100は、渋滞区間を自動走行中にドライバのセカンドタスクの実施を管理する機能部として、後方把握部76をさらに有する。後方把握部76は、情報取得部71を経由して環境認識部61から取得する認識結果に基づき、車両Amの後方を走行する後方車Ab及び後側方車Absの存在を把握する。
渋滞判定部72は、後方把握部76にて把握される後方車Ab及び後側方車Absの情報に基づき、渋滞中(渋滞時レベル3)の自動走行期間にて、自車周囲の渋滞パターンを判別する。渋滞判定部72は、第一実施形態の渋滞パターンA~D(図4~図7参照)に加えて、自車後方の他車両の状況に応じて渋滞パターンE~H,J,K(図18~図26及び図31参照)のうちで、現在の自車周囲の渋滞が該当する渋滞パターンを特定する。
図18及び図19に示す渋滞パターンEは、車両Amの周囲が他車両で埋まっている状態である。渋滞判定部72は、前走車Af及び隣接車Adに加えて、近接後方車Ab1及び後側方車Absが全て存在している場合に、パターンEの渋滞であると判別する。図18に示す渋滞パターンEは、渋滞パターンA(図4参照)を前提としており、車両Am及び近接後方車Ab1は、3レーン以上を含んだ道路の中央レーンLn2を走行している。後側方車Absは、左端レーンLn1及び右端レーンLn3の両方に存在している。図19に示す渋滞パターンEは、渋滞パターンB(図5参照)を前提としており、車両Am及び近接後方車Ab1は、左端レーンLn1又は右端レーンLn3を走行している。後側方車Absは、中央レーンLn2を走行している。
図20及び図21に示す渋滞パターンFは、自車レーンの後方のみが空いている状態である。渋滞判定部72は、前走車Af、隣接車Ad及び後側方車Absが存在する一方で、後方車Ab(近接後方車Ab1)が存在しない場合に、パターンFの渋滞であると判別する。図20に示す渋滞パターンFは、渋滞パターンA(図4参照)を前提としており、中央レーンLn2を走行する車両Amの後方が空いた状態となっている。一方、左端レーンLn1及び右端レーンLn3の両方には、後側方車Absが存在している。図21に示す渋滞パターンFは、渋滞パターンB(図5参照)を前提としており、左端レーンLn1又は右端レーンLn3を走行する車両Amの後方が空いた状態となっている。一方、中央レーンLn2には、後側方車Absが存在している。
図22及び図23に示す渋滞パターンGは、自車レーン以外(隣接レーン)の後方のみが空いている状態である。渋滞判定部72は、前走車Af、隣接車Ad及び後方車Ab(近接後方車Ab1)が存在する一方で、後側方車Absが存在しない場合に、パターンGの渋滞であると判別する。図22に示す渋滞パターンGは、渋滞パターンA(図4参照)を前提としており、車両Am及び近接後方車Ab1は、中央レーンLn2を走行している。対して、左端レーンLn1及び右端レーンLn3の少なくとも一方に、後側方車Absの存在しないスペースが生じている。図23に示す渋滞パターンGは、渋滞パターンB(図5参照)を前提としており、車両Am及び近接後方車Ab1は、左端レーンLn1又は右端レーンLn3を走行している。対して、中央レーンLn2には、後側方車Absの存在しないスペースが生じている。
図24に示す渋滞パターンHは、自車レーン以外(隣接レーン)が空いている状態である。渋滞判定部72は、前走車Af及び後方車Ab(近接後方車Ab1)が存在する一方で、後側方車Absが存在しない場合に、パターンHの渋滞であると判別する。渋滞パターンHは、渋滞パターンC(図6参照)を前提としており、車両Am及び近接後方車Ab1は、中央レーンLn2を走行している。対して、左端レーンLn1及び右端レーンLn3の少なくとも一方に、隣接車Ad及び後側方車Absの存在しないスペースが生じている。
図25及び図26に示す渋滞パターンJは、近接後方車Ab1及び後側方車Absが存在しない一方で、自車である車両Amと概ね同一速度で走行する遠方後方車Ab2が存在する状態である。図25に示す渋滞パターンJは、渋滞パターンA(図4参照)を前提としており、中央レーンLn2を走行する車両Amの後方に、少なくとも1台の遠方後方車Ab2が存在している。図26に示す渋滞パターンJは、渋滞パターンB(図5参照)を前提としており、左端レーンLn1又は右端レーンLn3を走行する車両Amの後方に、少なくとも1台の遠方後方車Ab2が存在している。
渋滞パターンK(図31参照)は、近接後方車Ab1及び後側方車Absに加えて、遠方後方車Ab2も存在しない状態である。渋滞判定部72は、周辺監視センサ30によって遠方後方車Ab2が認識されていない場合に、パターンKの渋滞であると判別する。
図17に示す渋滞判定部72は、経路情報に基づき特定される経路レーンLnr(図8及び図27のドット範囲参照)を走行する渋滞パターンDにおいて、経路レーンLnrがリスク区間SeRか否かをさらに判定する。リスク区間SeRは、合流又は分岐に関連する区間である。具体的に、本線レーンから分岐する分岐レーン(図8参照)のうちで本線レーンと接する区間、及び合流レーンと接続される本線の被合流レーン(図27参照)のうちで合流レーンと接する区間等がリスク区間SeRに規定される。こうしたリスク区間SeRを走行する場合、後述するように、動画コンテンツCTVの表示制限又はセカンドタスクの制限は、車両Amがリスク区間SeRの終了地点NEを通過するまで継続される。
渋滞判定部72は、車両Amの走行速度が渋滞判定閾値以下であり、且つ、前走車Afが検出されている場合、走行中の道路が片側1車線の道路(図28参照)か否かを判定する。こうした片側1車線の道路では、隣接する対向レーンLnaから自車レーンLnsへの割り込みは、実質的に発生しない。故に、渋滞判定部72が片側1車線の道路を走行していると判定した場合、提供制御部77による動画コンテンツCTVの表示制限又はセカンドタスクの制限は、中止される。
以上の渋滞判定部72にて実施される第二実施形態の渋滞判定処理の詳細を、図29及び図30に基づき、図17~図26及び図31を参照しつつ、以下説明する。尚、第二実施形態におけるS201~S207,S209の処理内容は、第一実施形態のS101~S108(図8参照)の処理内容と実質的に同一である。そのため、当該ステップの詳細な説明は省略する。
S208では、渋滞中の経路レーンLnrがリスク区間SeRであるか否かを判定する。S208にて、リスク区間SeRでないと判定した場合、S207に進み、自車周囲がパターンCの渋滞パターンであると判定する。一方で、リスク区間SeRであると判定した場合、S209に進み、渋滞パターンCよりも割り込みリスクの高い渋滞パターンDであると判定する。
S203~S209により前方及び側方の渋滞パターンを特定した後のS210では、自車の後方を走行する後方車であって、自車に近接する近接後方車Ab1の存在を把握する。S210にて、近接後方車Ab1が存在すると判定した場合、S211に進み、隣接レーンを走行する後側方車Absの存在を把握する。S211にて、全ての隣接レーンに後側方車Absが存在すると判定した場合、S212に進む。S212では、自車周囲がパターンEの渋滞パターンであると判定し、渋滞パターンA~Dとの判定結果を更新して、S221に進む。
一方、S211にて、後側方車Absの存在しない隣接レーンがあると判定した場合、S213に進む。S213では、隣接レーンを走行する隣接車Adの有無を判定する。S213にて、全ての隣接レーンに隣接車Adが存在すると判定した場合、S214に進む。S214では、自車周囲がパターンGの渋滞パターンであると判定し、渋滞パターンA又はBとの判定結果を更新して、S221に進む。対して、隣接車Adの存在しない隣接レーンがあると判定した場合、S213からS215に進む。S215では、自車周囲がパターンHの渋滞パターンであると判定し、渋滞パターンC又はDとの判定結果を更新して、S221に進む。
S210にて、近接後方車Ab1が存在しないと判定した場合、S216に進み、隣接レーンを走行する後側方車Absの存在を把握する。S216にて、全ての隣接レーンに後側方車Absが存在すると判定した場合、S217に進む。S217では、自車周囲がパターンFの渋滞パターンであると判定し、渋滞パターンA~Dとの判定結果を更新して、S221に進む。
一方、S216にて、後側方車Absの存在しない隣接レーンがあると判定した場合、S218に進む。S218では、遠方後方車Ab2の有無を判定する。S218にて、少なくとも1台の遠方後方車Ab2が存在すると判定した場合、S219に進む。S219では、自車周囲がパターンJの渋滞パターンであると判定し、渋滞パターンA~Dとの判定結果を更新して、S221に進む。対して、遠方後方車Ab2が存在しないと判定した場合、S220に進む。S220では、自車周囲がパターンKの渋滞パターンであると判定し、渋滞パターンA~Dとの判定結果を更新して、S221に進む。さらに、道路形状及び気象情報等の要因によって自車後方の状況が不明となる場合、渋滞パターンA~Dとの判定結を維持し、S221に進む。
S221では、最新の車速情報に基づき、自車の走行速度が渋滞解消閾値を超えたか否かを判定する。S221にて、走行速度が渋滞解消閾値以下であると判定した場合、S204に戻る。一方、S221にて、走行速度が渋滞解消閾値を超えたと判定した場合、今回の渋滞判定処理を終了する。
提供制御部77(図17参照)は、後方把握部76により把握される後方車Abの状況に応じて、自動走行期間にてドライバに許可されるセカンドタスクの許容範囲を変更し、動画コンテンツCTVの表示を制限する。具体的に、提供制御部77は、渋滞判定部72による渋滞パターンの判別結果等に基づき、自車後方からの追突のリスクを予測し、追突リスクに応じてセカンドタスクモードを切り替える。提供制御部77は、セカンドタスクモードの切り替えにより、自動走行期間に提供されるエンターテイメント系のコンテンツ表示制限を調整する。渋滞判定部72によって特定パターンの渋滞中であると判定された場合、提供制御部77は、提供される動画コンテンツCTVの表示の制限を強めることができる。
詳記すると、提供制御部77では、追突リスクの高低が各渋滞パターンに対し設定されている(図31参照)。一例として、追突リスクの順位づけは、渋滞パターンK、渋滞パターンJ、渋滞パターンE、渋滞パターンG、渋滞パターン、渋滞パターンF、渋滞パターンA~Dとされている。即ち、後方車Abの存在しない渋滞パターンKが、最も追突リスクの低い渋滞パターンとされる。対して、後方車Abの存在が確認できない渋滞パターンA~Dの状態が、最も追突リスクの高い渋滞パターンとされる。提供制御部77は、追突リスクが低くなるほど、セカンドタスクの制限を緩和し、動画コンテンツCTVの表示制限を弱めるか、又は無くしていく。
提供制御部77は、自車と同一のレーンを走行する後方車Abが把握されない場合に、後方車Abが把握される場合よりも、セカンドタスクの許容範囲を狭く設定し、動画コンテンツCTVの表示制限を強める。即ち、提供制御部77には、後方車Abの把握されない渋滞パターンF,A~Dが、後方車Abの追突リスクが高まり易い特定パターンの渋滞であると登録されている。一方で、渋滞パターンF,A~Dを除く他の渋滞パターンであって、近接後方車Ab1又は遠方後方車Ab2によって自車後方がガードされている渋滞パターンが、非特定パターンの渋滞となる。
提供制御部77は、渋滞判定部72にて渋滞パターンK,J,Eのいずれかであると認識されている場合、動画コンテンツCTVの表示が制限されないセカンドタスクモードDMn(図9参照)に設定する。その結果、動画コンテンツCTVは、メイン表示域DA1に通常表示される。
提供制御部77は、渋滞判定部72にて渋滞パターンG又はHであると認識されている場合、動画コンテンツCTVの表示がわずかに制限されたセカンドタスクモードDMr1(図32参照)に設定する。セカンドタスクモードDMr1では、メイン表示域DA1に、周辺車両通知MWisが表示される。周辺車両通知MWisは、例えば「周囲の車両に注意してください」等の注意喚起のメッセージを含む表示物である。周辺車両通知MWisは、メイン表示域DA1の上縁近傍に横長の帯状に表示され、動画コンテンツCTVの上縁部分を僅かに隠している。セカンドタスクモードDMr1では、動画コンテンツCTVの映像及び音声の再生は、継続される。
提供制御部77は、渋滞判定部72にて渋滞パターンF,A~D(特定パターン)のいずれかであると認識されている場合、動画コンテンツCTVの表示がさらに制限されたセカンドタスクモードDMr2(図33参照)に設定する。セカンドタスクモードDMr2では、メイン表示域DA1に、周辺車両注意MWbnが表示される。周辺車両注意MWbnは、例えば「前方・後方の車両に注意してください」等の注意喚起のメッセージを含む表示物である。周辺車両注意MWbnによる注意喚起は、周辺車両通知MWis(図32参照)による情報提示よりも、強い内容となる。周辺車両注意MWbnは、周辺車両通知MWisと同様に、動画コンテンツCTVの一部と重なるように、メイン表示域DA1の上縁近傍に横長の帯状に表示される。周辺車両注意MWbnによって隠されていても、動画コンテンツCTVの大部分は、ドライバから視認可能である。
以上のように、セカンドタスクモードの切り替えによってコンテンツ表示制限を調整する第二実施形態のコンテンツ制御処理の詳細を、図34に基づき、図9,図12,図17,図31~図33等を参照しつつ、以下説明する。コンテンツ制御処理は、自動運転機能によって車両Amが走行する自動走行期間にて、提供制御部77により実施される。
S221では、CID22の表示をセカンドタスクモードDMn(図9参照)に設定し、S222に進む。S222では、渋滞判定部72による渋滞判定の結果に基づき、自車周囲が渋滞中か否かを判定する。S222にて、渋滞中でないと判定した場合、S221に戻り、セカンドタスクモードDMnを継続させる。一方、S222にて、渋滞中であると判定した場合、S223に進む。
S223では、走行中の道路が片側1車線の道路か否かを判定する。S223にて、片側1車線の道路を走行していると判定した場合、S221に戻り、セカンドタスクモードDMnを継続させる。その結果、渋滞中における動画コンテンツCTVの表示制限が中止される。一方、S223にて、複数レーンを含む道路を走行していると判定した場合、S224に進む。
S224では、割込判定部74による判定結果に基づき、隣接車Adが自車の前方へ向けた割り込みの実施中であるか否かを判定する。S224にて、隣接車Adが割り込み実施中である判定した場合、S232に進む。S232では、セカンドタスクモードDMr3(図12参照)に設定し、S233に進む。一方、S224にて、隣接車Adが割り込み実施中ではないと判定した場合、S225に進む。S225では、割込予測部73による判定結果を参照し、割り込み予測の有無を判定する。S225にて、隣接車Adの割り込み予測がないと判定した場合、S226に進む。S226では、セカンドタスクモードDMnに設定し、S233に進む。一方、S225にて、隣接車Adの割り込み予測があると判定した場合、S227に進む。
S227では、自車周囲の渋滞がパターンK,J,Eのいずれかに該当するか否かを判定する。S227にて、パターンK,J,Eのいずれかの渋滞であると判定した場合、S226に進み、セカンドタスクモードDMnに設定する。一方、S227にて、パターンK,J,Eのいずれにも該当しないと判定した場合、S228に進む。
S228では、追突リスクが高まり易い特定パターンの渋滞中であるか否かを判定する。具体的に、S228では、自車周囲の渋滞がパターンA~D,Fのいずれかに該当するか否かを判定する。S228にて、パターンA~D,Fのいずれにも該当しない、即ち、パターンG又はHの渋滞中であると判定した場合、S230に進む。S230では、弱い制限がかけられたセカンドタスクモードDMr1(図32参照)に設定し、S233に進む。一方、S228にて、パターンA~D,Fのいずれかの渋滞である、即ち、特定パターンの渋滞である判定した場合、S229に進む。
S229では、渋滞中の走行速度が速度閾値を超えるか否かを判定する。S229にて、走行速度が速度閾値未満であると判定した場合、S231に進む。S231では、セカンドタスクモードDMr1よりも動画コンテンツCTVの表示制限を強めたセカンドタスクモードDMr2(図33参照)に設定し、S233に進む。一方、S229にて、走行速度が速度閾値を超えると判定した場合、S232に進み、さらに動画コンテンツCTVの表示制限を強めたセカンドタスクモードDMr3に設定して、S233に進む。
S233では、セカンドタスクモードを終了させるか否かを判定する。S233にて、セカンドタスクモードの継続を判定した場合、S222に戻り、動画コンテンツCTV等の提供を継続させる。一方、S233にて、セカンドタスクモードを終了させると判定した場合、S234に進む。S234では、CID22の画面を、セカンドタスクモードから通常モードに切り替え、一連のコンテンツ制御処理を終了する。
次に、セカンドタスクの許容範囲を制御する第二実施形態の範囲制御処理の詳細を、図35に基づき、図17を参照しつつ、さらに説明する。
S241では、渋滞判定部72による渋滞パターンの判別結果に基づき、自車周囲の渋滞パターンを把握して、S242に進む。S242では、コンテンツ制御処理のS228(図34参照)と同様に、追突リスクが高まり易い特定パターンの渋滞中であるか否かを判定する。具体的に、S242にて、自車周囲の渋滞が特定パターンであるパターンA~D,Fのいずれかに該当すると判定した場合、S243に進む。S243では、セカンドタスクの許容範囲を狭く設定し、今回の範囲制御処理を終了する。一方で、S242にて、自車周囲の渋滞がパターンA~D,Fのいずれにも該当しない、即ち、非特定パターンの渋滞中であると判定した場合、S244に進む。S244では、セカンドタスクの許容範囲を広く設定し、今回の範囲制御処理を終了する。
以上の結果、後方把握部76にて把握される後方車Abの状況に応じて、ドライバに許可されるセカンドタスクの許容範囲が変更される。具体的に、追突リスクの高い特定パターンの渋滞中では、ユーザ端末の操作及び食事等の行為は、不許可となる。対して、追突リスクの低い非特定パターンの渋滞中では、ユーザ端末の操作及び食事等の行為が許可される。
ここまで説明した第二実施形態でも、第一実施形態と同様の効果を奏し、隣接車Adによる割り込み発生の予測がドライバに通知される。その結果、渋滞中を自動運転機能によって走行する期間でのドライバに不安が軽減され得る。
加えて第二実施形態では、自動運転機能によって渋滞中を走行するとき、自車の後方を走行する後方車Abの状況に応じて、提供される動画コンテンツCTVの表示が制限される。故に、後方からの追突のリスクが、提供中の動画コンテンツCTVに生じる表示変化によってドライバに通知される。こうした通知によれば、自動運転機能によって渋滞中を走行するとき、ドライバに不安を与え難くなる。
また第二実施形態では、自動運転機能によって渋滞中を走行するとき、後方車Abの追突リスクが高まり易い特定の渋滞パターンであると判定されると、ドライバに提供される動画コンテンツCTVの表示が制限される。故に、後方車Abの追突リスクが、提供中のコンテンツに生じる表示変化により、ドライバに通知され得る。こうした通知によれば、自動運転機能によって渋滞中を走行するとき、ドライバに不安を与え難くなる。
さらに第二実施形態では、自動運転機能によって渋滞中を走行するとき、自車の後方を走行する後方車Abの状況に応じて、ドライバに許可されるセカンドタスクの許容範囲が変更される。故に、後方からの追突のリスクがあるとき、許容範囲の変化により、不安を感じ易いセカンドタスクが不許可とされ得る。その結果、自動運転機能によって渋滞中を走行するとき、ドライバに不安を与え難くなる。
加えて第二実施形態では、渋滞判定部72にて渋滞中であると判定された場合、提供制御部77は、走行中のレーンが合流又は分岐等に関連するリスク区間SeRであるか否かを判定する。そして、提供制御部77は、リスク区間SeRを自車が走行する渋滞パターンD(図7及び図27参照)のようなシーンの場合、動画コンテンツCTVの表示の制限を継続する。渋滞中のリスク区間SeRでは、合流や分岐等のない通常区間よりも隣接車Adの割り込みが発生し易くなる。故に、割り込みが発生し易い道路環境を判断する処理を追加し、割り込み可能性の高い状態の報知が継続されることによれば、ドライバの不安は、いっそう軽減され得る。
また第二実施形態では、渋滞判定部72にて渋滞中であると判定された場合、提供制御部77は、走行中の道路が片側1車線の道路かを判定する(図28参照)。そして、提供制御部77は、片側1車線の道路を自車が走行する場合、動画コンテンツCTVの表示制限を中止する。片側1車線の道路では、渋滞中であっても割り込みは発生しない。故に、片側1車線の道路で動画コンテンツCTVの表示を制限する、言い替えれば、割り込みの報知を中止する処理によれば、自動運転におけるドライバの利便性が向上し得る。
さらに第二実施形態では、自車と同一のレーンを走行する後方車Abが把握されない場合に、後方車Abが把握される場合よりも、ドライバに許可されるセカンドタスク許容範囲が狭く設定される。即ち、提供制御部77は、自車と同一のレーンを走行する後方車が把握されない場合に、後方車Abが把握される場合よりも動画コンテンツCTVの表示を制限する。自車の後方範囲が後方車Abによって埋められている場合、後方範囲が空いている場合よりも、後方からの追突リスクは低くなる。故に、後方車Abが把握される場合に、セカンドタスクの許可範囲を広げる又は動画コンテンツCTVの表示制限を緩和すれば、自動運転中における追突リスクと利便性との両立を図ることが可能になる。
尚、上述したように、第二実施形態では、渋滞パターンA~D,Fが「特定パターン」の渋滞に相当し、それ以外の渋滞パターンE,G,H,J,Kが「非特定パターン」の渋滞に相当する。
(他の実施形態)
以上、本開示の複数の実施形態について説明したが、本開示は、上記実施形態に限定して解釈されるものではなく、本開示の要旨を逸脱しない範囲内において種々の実施形態及び組み合わせに適用することができる。
以上、本開示の複数の実施形態について説明したが、本開示は、上記実施形態に限定して解釈されるものではなく、本開示の要旨を逸脱しない範囲内において種々の実施形態及び組み合わせに適用することができる。
上記実施形態では、エンターテイメント系のコンテンツの表示制限が、「強」、「中」、「弱」の3段階のうちで切り替えられていた。しかし、表示制限の程度は、2段階のうちで切り替えられてもよく、又は4段階以上設定された中で切り替えられてもよい。さらに、表示制限を行うか否かの切り替えが単純に実施されてもよい。
例えば、上記第一実施形態の変形例1,2では、特定パターンの渋滞判定に基づく表示制限が省略されている。変形例1の提供制御部77は、割り込みの実施予兆が検知された場合に、表示制限を「弱」とするセカンドタスクモードとし、割り込み実施中であると判定された場合に、表示制限を「強」とするセカンドタスクモードとする。さらに、変形例2の提供制御部77は、割り込みの実施予兆が検知された場合に、動画コンテンツCTVの表示を制限し、割り込みの実施予兆が検知されなかった場合に、動画コンテンツCTVの表示を制限しない。
また、上記第一実施形態の変形例3,4では、割り込みの実施予兆の検知に基づく表示制限が省略されている。変形例3の提供制御部77は、特定パターンの渋滞中であると判定された場合に、表示制限を「弱」とするセカンドタスクモードとし、割り込み実施中であると判定された場合に、表示制限を「強」とするセカンドタスクモードとする。さらに、変形例4の提供制御部77は、特定パターンの渋滞中であると判定された場合に、動画コンテンツCTVの表示を制限し、非特定パターンの渋滞中であると判定された場合に、動画コンテンツCTVの表示を制限しない。以上のように、コンテンツの表示制限を強める処理には、制限をオフからオンに切り替える処理と、弱かった制限を強める処理とが含まれている。
さらに、上記第一実施形態の変形例5では、特定パターンの渋滞中であると判定された場合と、割り込みの実施予兆が検知された場合とで、同程度の表示制限が行われる。一例として、提供制御部77は、特定パターンの渋滞中判定又は割り込み予測に基づき、表示制限を「弱」とするセカンドタスクモードとする。
またさらに、上記実施形態の変形例6では、割り込みの実施中判定に基づく表示制限が省略されている。提供制御部77は、特定パターンの渋滞中であると判定された場合に、表示制限を「弱」とするセカンドタスクモードとし、割り込みの実施予兆が検知された場合に表示制限を「強」とするセカンドタスクモードとする。
上記実施形態の変形例7では、渋滞中の走行速度に応じて、コンテンツの表示制限が多段的又は連続的に調整される。具体的には、渋滞中の走行速度が高くなるほど、提供制御部77は、割込予測通知MWf(図10参照)の表示面積(例えば、縦幅)を拡張させ、動画コンテンツCTVの表示面積を狭める。
上記実施形態の変形例8では、渋滞中の走行速度に応じたコンテンツの表示制限が省略されている。また、上記実施形態の変形例9では、渋滞パターンの判別結果に基づき、セカンドタスクの許容範囲を調整する処理が省略されている。
上記第二実施形態の変形例10の提供制御部77は、渋滞中に把握する後方車Abの状況に応じて、動画コンテンツCTVの制限を「なし」から「強」の間で切り替える。また、上記第二実施形態の変形例11では、片側1車線の道路を走行している場合でも、渋滞中であると判定された場合には、動画コンテンツCTVに僅かに表示制限がかけられる。
上記第二実施形態では、追突リスクの低い非特定パターンの渋滞中である場合、動画コンテンツCTVの制限は、「なし」及び「弱」のいずれかとされていた。一方で、変形例12では、動画コンテンツCTVの制限は、「なし」及び「弱」のいずれか一方のみとされる。
上記実施形態の変形例13では、運転席の背もたれ部分の左面部分に対する後傾角度を示す情報が、リクライニング情報として統合状態推定部75により取得される。統合状態推定部75は、運転席のリクライニングの状態を把握する。統合状態推定部75には、セカンドタスクの一つの種別として、背もたれ部分を後傾させて、寛ぐことが設定されている。
こうした変形例13において、提供制御部77は、セカンドタスクの許容範囲を広げたとき、運転席をリクライニングさせた状態を許可する。一方で、提供制御部77は、セカンドタスクの許容範囲を狭めたとき、運転席をリクライニングさせた状態を許可しない。提供制御部77は、渋滞パターンの遷移により、運転席のリクライニングが許容範囲から外れると、オーディオ装置24による音声メッセージにより、背もたれ部分を起こすようにドライバに促す。
上記実施形態の変形例14では、ドライバの視線方向がドライバモニタ29によって検出される。統合状態推定部75は、ドライバの視線方向がエンターテイメント系のコンテンツを提供する表示デバイス(例えば、CID22等)に向けられているかを判定する。提供制御部77は、ドライバの視線方向がCID22に向けられていない場合、CID22による中断要求通知MWrの表示を実施せずに、音声メッセージによる注意喚起のみを実施する。さらに、提供制御部77は、運転席及びフットレスト等に設けられた振動デバイスを用いて、許容範囲外のセカンドタスクを実施するドライバに注意喚起を行うことができる。
上記実施形態の提供制御部77は、自車前方への隣接車Adの割り込みに関する情報に基づき、エンターテイメント系のコンテンツの表示制限を有効化していた。しかし、提供制御部77は、自車後方への隣接車Adの割り込みに関する情報を用いて、コンテンツの表示制限を実施してもよい。加えて、自車後方の状況を把握する場合、ドライバへの報知又は注意喚起と共に後方車Abに渋滞であることを伝えるハザード制御が実施されてもよい。さらに、提供制御部77は、前走車のさらに前方への隣接車Adの割り込みに関する情報に基づき、コンテンツの表示制限を実施してもよい。
上記実施形態の自動運転システム50には、運転支援ECU50a及び自動運転ECU50bという2つの車載ECUが設けられていた。しかし、運転支援ECU50a及び自動運転ECU50bの各機能を備えた一つの車載ECUが、自動運転システム50を構築していてもよい。
セカンドタスクに関連するコンテンツを表示する表示デバイスは、CID22に限定されない。例えば、メータディスプレイ21及びHUD23が、コンテンツの提供に用いられてよい。さらに、電子ミラーシステムの各ディスプレイEMB,EML,EMRが、コンテンツの提供に用いられてよい。また、コンテンツを表示させる表示デバイスは、ドライバによって選択可能であってもよい。加えて、各表示デバイスに表示される各画像の形状、発光色、表示位置等は、適宜変更されてよい。また、各表示デバイスに表示されるメッセージの言語の種類は、ドライバ等のユーザ設定、並びに車両Amが使用される国及び地域等の設定に基づき、適宜変更されてよい。同様に、オーディオ装置24によって再生される音声メッセージの言語の種類も、適宜変更されてよい。
ドライバに許可されるセカンドタスクは、車両Amが使用される国及び地域の道路交通法等の法規に応じて、適宜変更されてよい。さらに、セカンドタスクの中断を回避する回避行動は、自動LCに限定されず、走行シーンに応じて適宜変更されてよい。
上記実施形態の変形例15では、メータディスプレイ21、CID22及びHUD23のいずれか一つが、HCU100と一体的に構成されている。言い替えれば、HCU100の処理機能は、いずれか一つの表示デバイスの制御回路に実装されている。こうした変形例10では、HCU100の処理機能を含んだ表示デバイスが「提示制御装置」に相当する。
上記実施形態にて、HCU100によって提供されていた各機能は、ソフトウェア及びそれを実行するハードウェア、ソフトウェアのみ、ハードウェアのみ、あるいはそれらの複合的な組合せによっても提供可能である。さらに、こうした機能がハードウェアとしての電子回路によって提供される場合、各機能は、多数の論理回路を含むデジタル回路、又はアナログ回路によっても提供可能である。
また、上記の提示制御方法を実現可能なプログラム等を記憶する記憶媒体(持続的有形コンピュータ読み取り媒体,non-transitory tangible storage medium)の形態も、適宜変更されてよい。例えば記憶媒体は、回路基板上に設けられた構成に限定されず、メモリカード等の形態で提供され、スロット部に挿入されて、HCUの制御回路に電気的に接続される構成であってよい。さらに、記憶媒体は、HCUへのプログラムのコピー基となる光学ディスク及びのハードディスクドライブ等であってもよい。
本開示に記載の制御部及びその手法は、コンピュータプログラムにより具体化された一つ乃至は複数の機能を実行するようにプログラムされたプロセッサを構成する専用コンピュータにより、実現されてもよい。あるいは、本開示に記載の装置及びその手法は、専用ハードウェア論理回路により、実現されてもよい。もしくは、本開示に記載の装置及びその手法は、コンピュータプログラムを実行するプロセッサと一つ以上のハードウェア論理回路との組み合わせにより構成された一つ以上の専用コンピュータにより、実現されてもよい。また、コンピュータプログラムは、コンピュータにより実行されるインストラクションとして、コンピュータ読み取り可能な非遷移有形記録媒体に記憶されていてもよい。
Claims (22)
- 自動運転機能を備える車両(Am)において用いられ、前記車両のドライバへ向けた情報の提示を制御する提示制御装置であって、
前記自動運転機能によって前記車両が走行する自動走行期間にて、渋滞中か否かを判定する渋滞判定部(72)と、
前記渋滞判定部にて渋滞中であると判定された場合に、前記車両である自車に隣接した隣接車(Ad)による割り込みの実施予兆を検知する割込予測部(73)と、
前記割込予測部にて前記隣接車による割り込みの実施予兆が検知された場合に、前記自動走行期間に提供されるコンテンツ(CTV)の表示を制限する提供制限部(77)と、
を備える提示制御装置。 - 自動運転機能を備える車両(Am)において用いられ、前記車両のドライバへ向けた情報の提示を制御する提示制御装置であって、
前記自動運転機能によって前記車両が走行する自動走行期間にて、前記車両である自車に隣接した隣接車(Ad)による割り込みが発生し易いとして設定された特定パターンの渋滞中であるか否かを判定する渋滞判定部(72)と、
前記渋滞判定部にて前記特定パターンの渋滞中であると判定された場合に、前記自動走行期間に提供されるコンテンツ(CTV)の表示の制限を強める提供制限部(77)と、
を備える提示制御装置。 - 前記提供制限部は、前記特定パターンの渋滞中である場合、前記特定パターン以外の非特定パターンの渋滞中である場合よりも、前記ドライバに許可される運転以外の特定行為の許容範囲を狭く設定する請求項2に記載の提示制御装置。
- 前記隣接車による割り込みの実施予兆を検知する割込予測部(73)、をさらに備え、
前記提供制限部は、前記割込予測部にて前記隣接車による割り込みの実施予兆が検知された場合に、前記コンテンツの表示を制限する請求項2又は3に記載の提示制御装置。 - 前記隣接車による割り込みが実施されているか否かを判定する割込判定部(74)、をさらに備え、
前記提供制限部は、前記割込判定部にて前記隣接車が割り込みの実施中であると判定された場合に、前記渋滞判定部にて前記特定パターンの渋滞中であると判定された場合よりも前記コンテンツの表示を制限する請求項2~4のいずれか一項に記載の提示制御装置。 - 前記隣接車による割り込みが実施されているか否かを判定する割込判定部(74)、をさらに備え、
前記提供制限部は、前記割込判定部にて前記隣接車が割り込みの実施中であると判定された場合、前記割込予測部にて前記隣接車による割り込みの実施予兆が検知された場合よりも前記コンテンツの表示を制限する請求項1又は4に記載の提示制御装置。 - 前記提供制限部は、
前記渋滞判定部にて渋滞中であると判定された場合に、前記自車の走行速度が速度閾値を超えるか否かを判定し、
走行速度が前記速度閾値を超える場合、走行速度が前記速度閾値未満の場合よりも前記コンテンツの表示を制限する請求項1~6のいずれか一項に記載の提示制御装置。 - 前記提供制限部は、
前記渋滞判定部にて渋滞中であると判定された場合に、走行中のレーンが合流又は分岐に関連するリスク区間(SeR)であるか否かを判定し、
前記自車が前記リスク区間を走行する場合、前記コンテンツの表示の制限を継続する請求項1~7のいずれか一項に記載の提示制御装置。 - 前記渋滞判定部は、走行中の道路が片側1車線の道路か否かを判定し、
前記提供制限部は、前記自車が前記片側1車線の道路を走行する場合、渋滞中における前記コンテンツの表示制限を中止する請求項1~8のいずれか一項に記載の提示制御装置。 - 前記車両である自車の後方を走行する後方車(Ab)の存在を把握する後方把握部(76)、をさらに備え、
前記提供制限部は、渋滞中に前記後方把握部にて把握される前記後方車の状況に応じて、前記自動走行期間に提供される前記コンテンツの表示を制限する請求項1~9のいずれか一項に記載の提示制御装置。 - 自動運転機能を備える車両(Am)において用いられ、前記車両のドライバへ向けた情報の提示を制御する提示制御装置であって、
前記車両である自車の後方を走行する後方車(Ab)の存在を把握する後方把握部(76)と、
前記自動運転機能によって前記車両が走行する自動走行期間にて、渋滞中か否かを判定する渋滞判定部(72)と、
渋滞中にて前記後方把握部により把握される前記後方車の状況に応じて、前記自動走行期間に提供されるコンテンツ(CTV)の表示を制限する提供制限部(77)と、
を備える提示制御装置。 - 自動運転機能を備える車両(Am)において用いられ、前記車両のドライバへ向けた情報の提示を制御する提示制御装置であって、
前記車両である自車の後方を走行する後方車(Ab)の存在を把握する後方把握部(76)と、
前記自動運転機能によって前記車両が走行する自動走行期間にて、前記後方車の追突リスクが高まり易いとして設定された特定パターンの渋滞中であるか否かを判定する渋滞判定部(72)と、
前記渋滞判定部によって前記特定パターンの渋滞中であると判定された場合に、前記自動走行期間に提供されるコンテンツ(CTV)の表示の制限を強める提供制限部(77)と、
を備える提示制御装置。 - 前記提供制限部は、前記自車と同一のレーンを走行する前記後方車が把握されない場合に、前記後方車が把握される場合よりも前記コンテンツの表示を制限する請求項11又は12に記載の提示制御装置。
- 自動運転機能を備える車両(Am)において用いられ、前記車両のドライバへ向けた情報の提示を制御する提示制御装置であって、
前記自動運転機能によって前記車両が走行する自動走行期間にて、渋滞中か否かを判定し、さらに前記車両である自車に隣接した隣接車(Ad)による割り込みが発生し易いとして設定された特定パターンの渋滞中であるか否かを判定する渋滞判定部(72)と、
前記特定パターン以外の非特定パターンの渋滞中である場合、前記特定パターンの渋滞中である場合よりも、前記自動走行期間にて前記ドライバに許可される運転以外の特定行為の許容範囲を広く設定する提供制限部(77)と、
を備える提示制御装置。 - 自動運転機能を備える車両(Am)において用いられ、前記車両のドライバへ向けた情報の提示を制御する提示制御装置であって、
前記車両である自車の後方を走行する後方車(Ab)の存在を把握する後方把握部(76)と、
前記自動運転機能によって前記車両が走行する自動走行期間にて、渋滞中か否かを判定する渋滞判定部(72)と、
渋滞中にて前記後方把握部により把握される前記後方車の状況に応じて、前記自動走行期間にて前記ドライバに許可される運転以外の特定行為の許容範囲を変更する提供制限部(77)と、
を備える提示制御装置。 - 前記提供制限部は、前記自車と同一のレーンを走行する前記後方車が把握されない場合に、前記後方車が把握される場合よりも前記ドライバに許可される前記特定行為の許容範囲を狭く設定する請求項15に記載の提示制御装置。
- 自動運転機能を備える車両(Am)において用いられ、前記車両のドライバへ向けた情報の提示を制御する提示制御プログラムであって、
少なくとも一つの処理部(11)に、
前記自動運転機能によって前記車両が走行する自動走行期間にて、渋滞中か否かを判定し(S122,S222)、
渋滞中であると判定した場合に、前記車両である自車に隣接した隣接車(Ad)による割り込みの実施予兆を検知し(S124,S225)、
前記隣接車による割り込みの実施予兆が検知された場合に、前記自動走行期間に提供されるコンテンツ(CTV)の表示を制限する(S128~S130,S230~S232)、
ことを含む処理を実行させる提示制御プログラム。 - 自動運転機能を備える車両(Am)において用いられ、前記車両のドライバへ向けた情報の提示を制御する提示制御プログラムであって、
少なくとも一つの処理部(11)に、
前記自動運転機能によって前記車両が走行する自動走行期間にて、前記車両である自車に隣接した隣接車(Ad)による割り込みが発生し易いとして設定された特定パターンの渋滞中であるか否かを判定し(S126)、
前記特定パターンの渋滞中であると判定した場合に、前記自動走行期間に提供されるコンテンツ(CTV)の表示の制限を強める(S129,S130)、
ことを含む処理を実行させる提示制御プログラム。 - 自動運転機能を備える車両(Am)において用いられ、前記車両のドライバへ向けた情報の提示を制御する提示制御プログラムであって、
少なくとも一つの処理部(11)に、
前記車両である自車の後方を走行する後方車(Ab)の存在を把握し(S210,S218)、
前記自動運転機能によって前記車両が走行する自動走行期間にて、渋滞中か否かを判定し(S222)、
渋滞中に把握する前記後方車の状況に応じて、前記自動走行期間に提供されるコンテンツ(CTV)の表示を制限する(S230~S232)、
ことを含む処理を実行させる提示制御プログラム。 - 自動運転機能を備える車両(Am)において用いられ、前記車両のドライバへ向けた情報の提示を制御する提示制御プログラムであって、
少なくとも一つの処理部(11)に、
前記車両である自車の後方を走行する後方車(Ab)の存在を把握し(S210,S218)、
前記自動運転機能によって前記車両が走行する自動走行期間にて、前記後方車の追突リスクが高まり易いとして設定された特定パターンの渋滞中であるか否かを判定し(S228)、
前記特定パターンの渋滞中であると判定した場合に、前記自動走行期間に提供されるコンテンツ(CTV)の表示の制限を強める(S231,S232)、
ことを含む処理を実行させる提示制御プログラム。 - 自動運転機能を備える車両(Am)において用いられ、前記車両のドライバへ向けた情報の提示を制御する提示制御プログラムであって、
少なくとも一つの処理部(11)に、
前記自動運転機能によって前記車両が走行する自動走行期間にて、前記車両である自車に隣接した隣接車(Ad)による割り込みが発生し易いとして設定された特定パターンの渋滞中であるか否かを判定し(S142)、
前記特定パターン以外の非特定パターンの渋滞中である場合、前記特定パターンの渋滞中である場合よりも、前記自動走行期間にて前記ドライバに許可される運転以外の特定行為の許容範囲を広く設定する(S143,S144)、
ことを含む処理を実行させる提示制御プログラム。 - 自動運転機能を備える車両(Am)において用いられ、前記車両のドライバへ向けた情報の提示を制御する提示制御プログラムであって、
少なくとも一つの処理部(11)に、
前記車両である自車の後方を走行する後方車(Ab)の存在を把握し(S210,S218)、
前記自動運転機能によって前記車両が渋滞中を走行する自動走行期間にて、把握する前記後方車の状況に応じて、前記ドライバに許可される運転以外の特定行為の許容範囲を変更する(S243,S244)、
ことを含む処理を実行させる提示制御プログラム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202180026061.3A CN115443495A (zh) | 2020-04-01 | 2021-03-22 | 提示控制装置以及提示控制程序 |
| US17/946,593 US20230018303A1 (en) | 2020-04-01 | 2022-09-16 | Presentation control device and non-transitory computer readable storage medium |
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020066153 | 2020-04-01 | ||
| JP2020-066153 | 2020-04-01 | ||
| JP2021027773A JP7338653B2 (ja) | 2020-04-01 | 2021-02-24 | 提示制御装置及び提示制御プログラム |
| JP2021-027773 | 2021-02-24 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US17/946,593 Continuation US20230018303A1 (en) | 2020-04-01 | 2022-09-16 | Presentation control device and non-transitory computer readable storage medium |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2021200340A1 true WO2021200340A1 (ja) | 2021-10-07 |
Family
ID=77929571
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2021/011734 WO2021200340A1 (ja) | 2020-04-01 | 2021-03-22 | 提示制御装置及び提示制御プログラム |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20230018303A1 (ja) |
| JP (1) | JP2023155282A (ja) |
| CN (1) | CN115443495A (ja) |
| WO (1) | WO2021200340A1 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7302584B2 (ja) * | 2020-12-16 | 2023-07-04 | トヨタ自動車株式会社 | 速度制御装置 |
| US20230264697A1 (en) * | 2022-02-22 | 2023-08-24 | Toyota Research Institute, Inc. | Varying extended reality content based on driver attentiveness |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2016052507A1 (ja) * | 2014-09-30 | 2016-04-07 | エイディシーテクノロジー株式会社 | 自動運転制御装置 |
| JP2017207907A (ja) * | 2016-05-18 | 2017-11-24 | 本田技研工業株式会社 | 車両制御システム、通信システム、車両制御方法、および車両制御プログラム |
| JP2019036339A (ja) * | 2018-10-16 | 2019-03-07 | 三菱電機株式会社 | 運転支援装置 |
| JP2019043173A (ja) * | 2017-08-29 | 2019-03-22 | スズキ株式会社 | 自動追従走行支援システム |
| JP2019160136A (ja) * | 2018-03-16 | 2019-09-19 | トヨタ自動車株式会社 | 先行車発進報知装置 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101756248B1 (ko) * | 2015-11-11 | 2017-07-11 | 현대오트론 주식회사 | 헤드업 디스플레이의 차선 변경 표시 장치 및 방법 |
| JP6838626B2 (ja) * | 2018-08-22 | 2021-03-03 | 株式会社デンソー | 表示制御装置、及び表示制御プログラム |
| JP6784734B2 (ja) * | 2018-08-31 | 2020-11-11 | 株式会社Subaru | 自動運転支援装置 |
| KR20190103093A (ko) * | 2019-08-16 | 2019-09-04 | 엘지전자 주식회사 | 자율주행 차량의 차선 변경 장치 및 방법 |
| JP7014214B2 (ja) * | 2019-11-12 | 2022-02-01 | 株式会社デンソー | 運転支援装置 |
-
2021
- 2021-03-22 CN CN202180026061.3A patent/CN115443495A/zh active Pending
- 2021-03-22 WO PCT/JP2021/011734 patent/WO2021200340A1/ja active Application Filing
-
2022
- 2022-09-16 US US17/946,593 patent/US20230018303A1/en active Pending
-
2023
- 2023-08-11 JP JP2023131705A patent/JP2023155282A/ja active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2016052507A1 (ja) * | 2014-09-30 | 2016-04-07 | エイディシーテクノロジー株式会社 | 自動運転制御装置 |
| JP2017207907A (ja) * | 2016-05-18 | 2017-11-24 | 本田技研工業株式会社 | 車両制御システム、通信システム、車両制御方法、および車両制御プログラム |
| JP2019043173A (ja) * | 2017-08-29 | 2019-03-22 | スズキ株式会社 | 自動追従走行支援システム |
| JP2019160136A (ja) * | 2018-03-16 | 2019-09-19 | トヨタ自動車株式会社 | 先行車発進報知装置 |
| JP2019036339A (ja) * | 2018-10-16 | 2019-03-07 | 三菱電機株式会社 | 運転支援装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN115443495A (zh) | 2022-12-06 |
| JP2023155282A (ja) | 2023-10-20 |
| US20230018303A1 (en) | 2023-01-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN109791054B (zh) | 信息输出控制装置及信息输出控制方法 | |
| US20220340166A1 (en) | Presentation control device, presentation control program, and driving control device | |
| WO2017064941A1 (ja) | 報知管理装置及び報知管理方法 | |
| WO2021210316A1 (ja) | 制御装置及び制御プログラム | |
| JP2023155282A (ja) | 提示制御装置及び提示制御プログラム | |
| JP7226104B2 (ja) | 情報提示装置、情報提示方法および情報提示プログラム | |
| WO2022224721A1 (ja) | 提示制御装置、提示制御プログラム、自動運転制御装置および自動運転制御プログラム | |
| US20240010216A1 (en) | Automated driving control device, non-transitory computer-readable storage medium storing automated driving control program, presentation control device, and non-transitory computer-readable storage medium storing presentation control program | |
| JP2023138849A (ja) | 提示制御装置及び提示制御プログラム | |
| JP7338653B2 (ja) | 提示制御装置及び提示制御プログラム | |
| JP7347459B2 (ja) | 制御装置及び制御プログラム | |
| JP2019167094A (ja) | 報知管理装置及び報知管理プログラム | |
| JP2021160708A (ja) | 提示制御装置、提示制御プログラム、自動走行制御システムおよび自動走行制御プログラム | |
| JP7334768B2 (ja) | 提示制御装置及び提示制御プログラム | |
| WO2023026717A1 (ja) | 自動運転制御装置、及び自動運転制御プログラム | |
| WO2022163227A1 (ja) | 自動運転制御装置、自動運転制御プログラム、提示制御装置及び提示制御プログラム | |
| WO2022039021A1 (ja) | 車両用渋滞判断装置、および車両用表示制御装置 | |
| WO2022244548A1 (ja) | 自動運転制御装置、及び自動運転制御プログラム | |
| WO2021199964A1 (ja) | 提示制御装置、提示制御プログラム、自動走行制御システムおよび自動走行制御プログラム | |
| WO2022209459A1 (ja) | 自動運転制御装置、自動運転制御プログラム、提示制御装置及び提示制御プログラム | |
| WO2022030317A1 (ja) | 車両用表示装置、および車両用表示方法 | |
| WO2022215443A1 (ja) | 機能制御装置、及び機能制御プログラム | |
| US20240083455A1 (en) | Function control device, function control program, automated driving control device, and storage medium | |
| JP2022151544A (ja) | 自動運転制御装置、自動運転制御プログラム、提示制御装置及び提示制御プログラム | |
| JP2022115055A (ja) | 自動運転制御装置、自動運転制御プログラム、提示制御装置及び提示制御プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 21781174 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 21781174 Country of ref document: EP Kind code of ref document: A1 |