WO2021145335A1 - 車両制御装置、車両制御方法および車両制御システム - Google Patents
車両制御装置、車両制御方法および車両制御システム Download PDFInfo
- Publication number
- WO2021145335A1 WO2021145335A1 PCT/JP2021/000796 JP2021000796W WO2021145335A1 WO 2021145335 A1 WO2021145335 A1 WO 2021145335A1 JP 2021000796 W JP2021000796 W JP 2021000796W WO 2021145335 A1 WO2021145335 A1 WO 2021145335A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- differential
- vehicle
- braking force
- ecu
- electric brake
- Prior art date
Links
- 238000000034 method Methods 0.000 title claims description 19
- 230000007246 mechanism Effects 0.000 claims abstract description 284
- 230000001141 propulsive effect Effects 0.000 claims description 8
- 230000007423 decrease Effects 0.000 claims description 2
- 230000033001 locomotion Effects 0.000 abstract description 13
- 238000006243 chemical reaction Methods 0.000 description 10
- 230000006870 function Effects 0.000 description 10
- 230000005484 gravity Effects 0.000 description 9
- 230000009467 reduction Effects 0.000 description 7
- 230000001133 acceleration Effects 0.000 description 6
- 238000005452 bending Methods 0.000 description 6
- 230000008569 process Effects 0.000 description 6
- 230000005540 biological transmission Effects 0.000 description 4
- 210000000078 claw Anatomy 0.000 description 4
- 238000001514 detection method Methods 0.000 description 4
- 230000009977 dual effect Effects 0.000 description 4
- 230000008878 coupling Effects 0.000 description 3
- 238000010168 coupling process Methods 0.000 description 3
- 238000005859 coupling reaction Methods 0.000 description 3
- 230000000881 depressing effect Effects 0.000 description 3
- 238000010586 diagram Methods 0.000 description 3
- 238000006073 displacement reaction Methods 0.000 description 3
- 230000008859 change Effects 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 238000003825 pressing Methods 0.000 description 2
- 238000012545 processing Methods 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 238000012546 transfer Methods 0.000 description 2
- 102100034112 Alkyldihydroxyacetonephosphate synthase, peroxisomal Human genes 0.000 description 1
- 101000799143 Homo sapiens Alkyldihydroxyacetonephosphate synthase, peroxisomal Proteins 0.000 description 1
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 1
- 230000002159 abnormal effect Effects 0.000 description 1
- 238000000848 angular dependent Auger electron spectroscopy Methods 0.000 description 1
- 238000002485 combustion reaction Methods 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 239000011888 foil Substances 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 229910052710 silicon Inorganic materials 0.000 description 1
- 239000010703 silicon Substances 0.000 description 1
- 230000001629 suppression Effects 0.000 description 1
Images







Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T13/00—Transmitting braking action from initiating means to ultimate brake actuator with power assistance or drive; Brake systems incorporating such transmitting means, e.g. air-pressure brake systems
- B60T13/74—Transmitting braking action from initiating means to ultimate brake actuator with power assistance or drive; Brake systems incorporating such transmitting means, e.g. air-pressure brake systems with electrical assistance or drive
- B60T13/741—Transmitting braking action from initiating means to ultimate brake actuator with power assistance or drive; Brake systems incorporating such transmitting means, e.g. air-pressure brake systems with electrical assistance or drive acting on an ultimate actuator
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/02—Ensuring safety in case of control system failures, e.g. by diagnosing, circumventing or fixing failures
- B60W50/029—Adapting to failures or work around with other constraints, e.g. circumvention by avoiding use of failed parts
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/02—Ensuring safety in case of control system failures, e.g. by diagnosing, circumventing or fixing failures
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K17/00—Arrangement or mounting of transmissions in vehicles
- B60K17/04—Arrangement or mounting of transmissions in vehicles characterised by arrangement, location, or kind of gearing
- B60K17/16—Arrangement or mounting of transmissions in vehicles characterised by arrangement, location, or kind of gearing of differential gearing
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K17/00—Arrangement or mounting of transmissions in vehicles
- B60K17/04—Arrangement or mounting of transmissions in vehicles characterised by arrangement, location, or kind of gearing
- B60K17/16—Arrangement or mounting of transmissions in vehicles characterised by arrangement, location, or kind of gearing of differential gearing
- B60K17/165—Arrangement or mounting of transmissions in vehicles characterised by arrangement, location, or kind of gearing of differential gearing provided between independent half axles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K23/00—Arrangement or mounting of control devices for vehicle transmissions, or parts thereof, not otherwise provided for
- B60K23/04—Arrangement or mounting of control devices for vehicle transmissions, or parts thereof, not otherwise provided for for differential gearing
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T13/00—Transmitting braking action from initiating means to ultimate brake actuator with power assistance or drive; Brake systems incorporating such transmitting means, e.g. air-pressure brake systems
- B60T13/10—Transmitting braking action from initiating means to ultimate brake actuator with power assistance or drive; Brake systems incorporating such transmitting means, e.g. air-pressure brake systems with fluid assistance, drive, or release
- B60T13/66—Electrical control in fluid-pressure brake systems
- B60T13/662—Electrical control in fluid-pressure brake systems characterised by specified functions of the control system components
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T13/00—Transmitting braking action from initiating means to ultimate brake actuator with power assistance or drive; Brake systems incorporating such transmitting means, e.g. air-pressure brake systems
- B60T13/74—Transmitting braking action from initiating means to ultimate brake actuator with power assistance or drive; Brake systems incorporating such transmitting means, e.g. air-pressure brake systems with electrical assistance or drive
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T17/00—Component parts, details, or accessories of power brake systems not covered by groups B60T8/00, B60T13/00 or B60T15/00, or presenting other characteristic features
- B60T17/18—Safety devices; Monitoring
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T17/00—Component parts, details, or accessories of power brake systems not covered by groups B60T8/00, B60T13/00 or B60T15/00, or presenting other characteristic features
- B60T17/18—Safety devices; Monitoring
- B60T17/22—Devices for monitoring or checking brake systems; Signal devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T7/00—Brake-action initiating means
- B60T7/02—Brake-action initiating means for personal initiation
- B60T7/04—Brake-action initiating means for personal initiation foot actuated
- B60T7/042—Brake-action initiating means for personal initiation foot actuated by electrical means, e.g. using travel or force sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T8/00—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force
- B60T8/26—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force characterised by producing differential braking between front and rear wheels
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T8/00—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force
- B60T8/32—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force responsive to a speed condition, e.g. acceleration or deceleration
- B60T8/321—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force responsive to a speed condition, e.g. acceleration or deceleration deceleration
- B60T8/329—Systems characterised by their speed sensor arrangements
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T8/00—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force
- B60T8/32—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force responsive to a speed condition, e.g. acceleration or deceleration
- B60T8/88—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force responsive to a speed condition, e.g. acceleration or deceleration with failure responsive means, i.e. means for detecting and indicating faulty operation of the speed responsive control means
- B60T8/885—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force responsive to a speed condition, e.g. acceleration or deceleration with failure responsive means, i.e. means for detecting and indicating faulty operation of the speed responsive control means using electrical circuitry
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T8/00—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force
- B60T8/32—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force responsive to a speed condition, e.g. acceleration or deceleration
- B60T8/88—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force responsive to a speed condition, e.g. acceleration or deceleration with failure responsive means, i.e. means for detecting and indicating faulty operation of the speed responsive control means
- B60T8/92—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force responsive to a speed condition, e.g. acceleration or deceleration with failure responsive means, i.e. means for detecting and indicating faulty operation of the speed responsive control means automatically taking corrective action
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/12—Conjoint control of vehicle sub-units of different type or different function including control of differentials
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/12—Conjoint control of vehicle sub-units of different type or different function including control of differentials
- B60W10/16—Axle differentials, e.g. for dividing torque between left and right wheels
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/18—Conjoint control of vehicle sub-units of different type or different function including control of braking systems
- B60W10/184—Conjoint control of vehicle sub-units of different type or different function including control of braking systems with wheel brakes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/02—Control of vehicle driving stability
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/18009—Propelling the vehicle related to particular drive situations
- B60W30/18109—Braking
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D55/00—Brakes with substantially-radial braking surfaces pressed together in axial direction, e.g. disc brakes
- F16D55/02—Brakes with substantially-radial braking surfaces pressed together in axial direction, e.g. disc brakes with axially-movable discs or pads pressed against axially-located rotating members
- F16D55/22—Brakes with substantially-radial braking surfaces pressed together in axial direction, e.g. disc brakes with axially-movable discs or pads pressed against axially-located rotating members by clamping an axially-located rotating disc between movable braking members, e.g. movable brake discs or brake pads
- F16D55/224—Brakes with substantially-radial braking surfaces pressed together in axial direction, e.g. disc brakes with axially-movable discs or pads pressed against axially-located rotating members by clamping an axially-located rotating disc between movable braking members, e.g. movable brake discs or brake pads with a common actuating member for the braking members
- F16D55/225—Brakes with substantially-radial braking surfaces pressed together in axial direction, e.g. disc brakes with axially-movable discs or pads pressed against axially-located rotating members by clamping an axially-located rotating disc between movable braking members, e.g. movable brake discs or brake pads with a common actuating member for the braking members the braking members being brake pads
- F16D55/226—Brakes with substantially-radial braking surfaces pressed together in axial direction, e.g. disc brakes with axially-movable discs or pads pressed against axially-located rotating members by clamping an axially-located rotating disc between movable braking members, e.g. movable brake discs or brake pads with a common actuating member for the braking members the braking members being brake pads in which the common actuating member is moved axially, e.g. floating caliper disc brakes
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D65/00—Parts or details
- F16D65/14—Actuating mechanisms for brakes; Means for initiating operation at a predetermined position
- F16D65/16—Actuating mechanisms for brakes; Means for initiating operation at a predetermined position arranged in or on the brake
- F16D65/18—Actuating mechanisms for brakes; Means for initiating operation at a predetermined position arranged in or on the brake adapted for drawing members together, e.g. for disc brakes
- F16D65/183—Actuating mechanisms for brakes; Means for initiating operation at a predetermined position arranged in or on the brake adapted for drawing members together, e.g. for disc brakes with force-transmitting members arranged side by side acting on a spot type force-applying member
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H48/00—Differential gearings
- F16H48/20—Arrangements for suppressing or influencing the differential action, e.g. locking devices
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H48/00—Differential gearings
- F16H48/20—Arrangements for suppressing or influencing the differential action, e.g. locking devices
- F16H48/22—Arrangements for suppressing or influencing the differential action, e.g. locking devices using friction clutches or brakes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T2220/00—Monitoring, detecting driver behaviour; Signalling thereof; Counteracting thereof
- B60T2220/03—Driver counter-steering; Avoidance of conflicts with ESP control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T2220/00—Monitoring, detecting driver behaviour; Signalling thereof; Counteracting thereof
- B60T2220/04—Pedal travel sensor, stroke sensor; Sensing brake request
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T2250/00—Monitoring, detecting, estimating vehicle conditions
- B60T2250/04—Vehicle reference speed; Vehicle body speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T2270/00—Further aspects of brake control systems not otherwise provided for
- B60T2270/40—Failsafe aspects of brake control systems
- B60T2270/402—Back-up
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T2270/00—Further aspects of brake control systems not otherwise provided for
- B60T2270/40—Failsafe aspects of brake control systems
- B60T2270/406—Test-mode; Self-diagnosis
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/02—Ensuring safety in case of control system failures, e.g. by diagnosing, circumventing or fixing failures
- B60W50/029—Adapting to failures or work around with other constraints, e.g. circumvention by avoiding use of failed parts
- B60W2050/0297—Control Giving priority to different actuators or systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/18—Braking system
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/10—Longitudinal speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/18—Steering angle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/12—Differentials
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/12—Differentials
- B60W2710/125—Locking status
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/18—Braking system
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2300/00—Purposes or special features of road vehicle drive control systems
- B60Y2300/80—Control of differentials
- B60Y2300/84—Differential locking
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D2121/00—Type of actuator operation force
- F16D2121/18—Electric or magnetic
- F16D2121/24—Electric or magnetic using motors
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D2125/00—Components of actuators
- F16D2125/18—Mechanical mechanisms
- F16D2125/20—Mechanical mechanisms converting rotation to linear movement or vice versa
- F16D2125/34—Mechanical mechanisms converting rotation to linear movement or vice versa acting in the direction of the axis of rotation
- F16D2125/36—Helical cams, Ball-rotating ramps
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H48/00—Differential gearings
- F16H48/20—Arrangements for suppressing or influencing the differential action, e.g. locking devices
- F16H2048/204—Control of arrangements for suppressing differential actions
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H48/00—Differential gearings
- F16H48/20—Arrangements for suppressing or influencing the differential action, e.g. locking devices
- F16H2048/204—Control of arrangements for suppressing differential actions
- F16H2048/205—Control of arrangements for suppressing differential actions using the steering as a control parameter
Definitions
- the present disclosure relates to, for example, a vehicle control device, a vehicle control method, and a vehicle control system.
- Patent Document 1 discloses an electric brake device including a caliper in which a piston, a motor, and a ball lamp mechanism that converts the rotation of the motor into linear motion and transmits the rotation to the piston are built in the caliper main body. .. This electric brake device operates a ball lamp mechanism in response to the rotation of the motor to propel the piston, and presses the brake pad against the disc rotor to generate braking force.
- An object of an embodiment of the present invention is to provide a vehicle control device, a vehicle control method, and a vehicle control system capable of suppressing an increase in component cost while ensuring a redundant function of an electric brake mechanism.
- the vehicle control device is provided in the vehicle and includes a control unit that performs a calculation based on the input information and outputs a calculation result.
- a differential device provided between the first drive wheel of the vehicle and the second drive wheel of the vehicle, a differential limiting mechanism for limiting the differential of the differential device, and the first drive wheel.
- the first electric brake mechanism that propels the first braking member with the first motor to apply the braking force
- the second braking member that propels the second braking member with respect to the second drive wheel to apply the braking force.
- the control unit includes a second electric brake mechanism to be applied, and the control unit acquires information on a failure related to the operation of the first electric brake mechanism and applies it to the first drive wheel and the second drive wheel.
- the vehicle is a differential device provided between the first drive wheel of the vehicle and the second drive wheel of the vehicle.
- a differential limiting mechanism that limits the differential of the differential device, and a first electric braking mechanism that propels the first braking member with the first motor to apply braking force to the first drive wheel.
- the vehicle control method includes an operation of the first electric brake mechanism, which comprises a second electric brake mechanism in which a second braking member is propelled by a second motor to apply a braking force to the second drive wheel.
- a differential limiting control command for limiting the differential of the differential device is output to the differential limiting mechanism.
- the vehicle control system includes a differential device provided between the first drive wheel of the vehicle and the second drive wheel of the vehicle.
- the differential limiting mechanism that limits the differential of the differential device, the first electric braking mechanism that propels the first braking member with the first motor to apply braking force to the first driving wheel, and the above.
- the mechanism includes the controller that outputs a differential limiting control command for limiting the differential of the differential device.
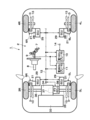
- FIG. 1 It is the schematic which shows the vehicle which mounted the vehicle control device and the vehicle control system according to an embodiment. It is the schematic which shows the brake mechanism on the front wheel side, the brake mechanism on the rear wheel side, the 1st ECU and the 2nd ECU in FIG. 1. It is a flow chart which shows the control process by the 1st ECU or the 2nd ECU. It is explanatory drawing (the figure which looked at the vehicle from above) which shows the relationship between the braking force of a vehicle, and the turning force based on this braking force. It is explanatory drawing which simplifies the relationship between the braking force and the turning force in FIG. It is a characteristic diagram which shows an example of the relationship between a vehicle speed and a differential fastening amount.
- FIG. 1 shows the vehicle system.
- the vehicle 1 is equipped with a brake device 2 (brake system) that applies a braking force to the wheels 3 and 4 (front wheels 3L, 3R, rear wheels 4L, 4R) to brake the vehicle 1.
- the brake device 2 is provided on the left and right front wheel side electric brake mechanisms 5L and 5R (front braking mechanism) provided corresponding to the left front wheel 3L and the right front wheel 3R, and the left rear wheel 4L and the right rear wheel 4R.
- left and right rear wheel side electric brake mechanisms 6L, 6R rear braking mechanism
- brake pedal 7 operation tool
- pedal simulator 8 that generates a back reaction force
- pedal stroke sensor 9 as an operation detection sensor that measures the operation amount of the driver's brake pedal 7.
- the left and right front wheel side electric brake mechanisms 5L and 5R and the left and right rear wheel side electric brake mechanisms 6L and 6R are composed of, for example, electric disc brakes. That is, the electric brake mechanisms 5 and 6 apply braking force to the wheels 3 and 4 (front wheels 3L, 3R, rear wheels 4L, 4R) by driving the electric motor 23 (see FIG. 2).
- the left and right rear wheel side electric brake mechanisms 6L and 6R are provided with a parking mechanism 28.
- the pedal stroke sensor 9 is connected to the first brake control ECU 10 and the second brake control ECU 11, which are ECUs (Electronic Control Units) for brake control, respectively.
- the first brake control ECU 10 also referred to as the first ECU 10
- the second brake control ECU 11 also referred to as the second ECU 11
- the first ECU 10 and the second ECU 11 are configured to include a microcomputer having an arithmetic processing unit (CPU), a storage device (memory), a control board, and the like, and correspond to a vehicle control device and a controller.
- the first ECU 10 and the second ECU 11 receive the input of the signal from the pedal stroke sensor 9 and calculate the braking force (target braking force) for each wheel (four wheels) by a predetermined control program.
- the first ECU 10 calculates, for example, the target braking force to be applied by the front wheel 3R on the right side and the rear wheel 4L on the left side. Based on the calculated target braking force, the first ECU 10 issues a braking command (target thrust) to each of the two wheels, the front wheel 3R on the right side and the rear wheel 4L on the left side, as a vehicle data bus to the electric braking ECUs 29 and 29. Output (transmit) via CAN12 (Controller area network) of. The second ECU 11 calculates, for example, the target braking force to be applied by the front wheel 3L on the left side and the rear wheel 4R on the right side.
- a braking command target thrust
- CAN12 Controller area network
- the second ECU 11 Based on the calculated target braking force, the second ECU 11 issues a braking command (target thrust) to each of the two wheels, the front wheel 3L on the left side and the rear wheel 4R on the right side, via the CAN 12 to the electric braking ECUs 29 and 29. Output (send).
- the first ECU 10 and the second ECU 11 perform a calculation based on the input information (for example, a signal from the pedal stroke sensor 9) and output a calculation result (for example, a braking command).
- Control units 10A and 11A (FIG. 2) are provided.
- Wheel speed sensors 13 and 13 for detecting the speeds (wheel speeds) of these wheels 3L, 3R, 4L and 4R are provided in the vicinity of the front wheels 3L and 3R and the rear wheels 4L and 4R, respectively.
- the wheel speed sensors 13 and 13 are connected to the first ECU 10 and the second ECU 11.
- the first ECU 10 and the second ECU 11 can acquire the wheel speeds of the wheels 3L, 3R, 4L, and 4R based on the signals from the wheel speed sensors 13 and 13.
- the first ECU 10 and the second ECU 11 receive vehicle information transmitted via the CAN 12 from other ECUs mounted on the vehicle 1 (for example, a prime mover control ECU, an electronically controlled differential gear control ECU 38, etc., which will be described later).
- the first ECU 10 and the second ECU 11 via the CAN 12 include AT range position or MT shift position information, ignition on / off information, engine speed information, power train torque information, and transmission gear ratio information.
- AT range position or MT shift position information ignition on / off information
- engine speed information power train torque information
- transmission gear ratio information transmission gear ratio information.
- a parking brake switch 14 is provided near the driver's seat.
- the parking brake switch 14 is connected to the first ECU 10 (and the second ECU 11 via the CAN 12).
- the parking brake switch 14 sends signals (operation request signals) corresponding to parking brake operation requests (holding request apply request, release request release request) to the first ECU 10 and the second ECU 11 in response to the driver's operation instruction. introduce.
- the first ECU 10 and the second ECU 11 transmit parking brake commands for the two rear wheels to the electric brake ECUs 29 and 29 based on the operation (operation request signal) of the parking brake switch 14.
- the parking brake switch 14 corresponds to a switch that operates the parking mechanism 28.
- the left and right front wheel side electric brake mechanisms 5L and 5R include a brake mechanism 21 and an electric brake ECU 29.
- the left and right rear wheel side electric brake mechanisms 6L and 6R include a brake mechanism 21, a parking mechanism 28 as a braking force holding mechanism, and an electric brake ECU 29.
- the electric brake mechanism 5 has the same configuration as the electric brake mechanism 6 except that the electric brake mechanism 5 is not provided with the parking mechanism 28.
- the brake mechanism 21 includes a rotation angle sensor 30 as a position detecting means for detecting the motor rotation position and a thrust sensor 31 as a thrust detecting means for detecting a thrust (piston thrust).
- the current sensor 32 is provided as a current detecting means for detecting the motor current.
- the brake mechanism 21 is provided for each of the left and right wheels of the vehicle 1, that is, on the left front wheel 3L side and the right front wheel 3R side, and on each of the left rear wheel 4L side and the right rear wheel 4R side. It is provided.
- the brake mechanism 21 is provided with an electric motor 23.
- the brake mechanism 21 includes a caliper 22 as a cylinder (foil cylinder), a piston 26 as a pressing member, and a brake pad 27 as a braking member (pad).
- the brake mechanism 21 is provided with an electric motor 23 as an electric motor (electric actuator), a deceleration mechanism 24, a rotation linear motion conversion mechanism 25, and a fail-open mechanism (return spring) (not shown).
- the electric motor 23 is driven (rotated) by the supply of electric power to propel the piston 26. As a result, the electric motor 23 applies a braking force.
- the electric motor 23 is controlled by the electric brake ECU 29 based on a braking command (target thrust) from the first ECU 10 or the second ECU 11.
- the speed reduction mechanism 24 decelerates the rotation of the electric motor 23 and transmits it to the rotation linear motion conversion mechanism 25.
- the rotation linear motion conversion mechanism 25 converts the rotation of the electric motor 23 transmitted via the reduction mechanism 24 into axial displacement (linear displacement) of the piston 26.
- the piston 26 is propelled by the drive of the electric motor 23 to move the brake pads 27.
- the brake pad 27 is pressed by the piston 26 against the disc rotor D as a member to be braked (disc).
- the disc rotor D rotates together with the wheels 3L, 3R, 4L, 4R.
- a return spring (fail open mechanism) (not shown) applies a rotational force in the braking release direction to the rotating member of the rotation linear motion conversion mechanism 25 when braking is applied.
- the piston 26 is propelled to press the brake pad 27 against the disc rotor D by driving the electric motor 23. That is, the brake mechanism 21 transmits the thrust generated by the drive of the electric motor 23 to the piston 26 that moves the brake pad 27 based on the braking request (braking command).
- the parking mechanism 28 is provided on each of the left side (left rear wheel 4L side) brake mechanism 21 and the right side (right rear wheel 4R side) brake mechanism 21.
- the parking mechanism 28 holds the propulsion state of the piston 26 of the brake mechanism 21. That is, the parking mechanism 28 holds and releases the braking force.
- the parking mechanism 28 holds a braking force by locking a part of the brake mechanism 21.
- the parking mechanism 28 is configured by a ratchet mechanism (lock mechanism) that blocks (locks) rotation by engaging (locking) an engaging claw (lever member) with a claw wheel (ratchet gear).
- the engaging claw is engaged with the claw wheel by driving a solenoid controlled by, for example, the first ECU 10, the second ECU 11, and the electric brake ECU 29.
- the rotation of the rotating shaft of the electric motor 23 is prevented, and the braking force is maintained.
- the electric brake ECU 29 includes brake mechanisms 21 and 21, that is, the brake mechanism 21 on the left front wheel 3L side, the brake mechanism 21 on the right front wheel 3R side, the brake mechanism 21 on the left rear wheel 4L side, and the brake on the right rear wheel 4R side. It is provided corresponding to each of the mechanisms 21.
- the electric brake ECU 29 includes a microcomputer and a drive circuit (for example, an inverter).
- the electric brake ECU 29 controls the brake mechanism 21 (electric motor 23) based on a command from the first ECU 10 or the second ECU 11.
- the electric brake ECU 29 on the rear wheel side also controls the parking mechanism 28 (solenoid) based on a command from the first ECU 10 or the second ECU 11.
- the electric brake ECU 29, together with the first ECU 10 and the second ECU 11, constitutes a control device (brake control device) that controls the operation of the electric motor 23 (and the parking mechanism 28).
- the electric brake ECU 29 controls the drive of the electric motor 23 based on the braking command (target thrust).
- the electric brake ECU 29 on the rear wheel side controls the drive of the parking mechanism 28 (solenoid) based on the operation command.
- a signal corresponding to a braking command and a signal corresponding to an operation command are input from the first ECU 10 or the second ECU 11 to the electric brake ECU 29.
- the rotation angle sensor 30 detects the rotation angle (motor rotation angle) of the rotation shaft of the electric motor 23.
- the rotation angle sensor 30 is provided corresponding to the electric motor 23 of each brake mechanism 21, and constitutes a position detecting means for detecting the rotation position (motor rotation position) of the electric motor 23 and, by extension, the piston position. is doing.
- the thrust sensor 31 detects a reaction force with respect to a thrust (pushing pressure) from the piston 26 to the brake pad 27.
- the thrust sensor 31 is provided in each brake mechanism 21 and constitutes a thrust detecting means for detecting the thrust (piston thrust) acting on the piston 26.
- the current sensor 32 detects the current (motor current) supplied to the electric motor 23.
- the current sensor 32 is provided corresponding to the electric motor 23 of each brake mechanism 21, and constitutes a current detecting means for detecting the motor current (motor torque current) of the electric motor 23.
- the rotation angle sensor 30, the thrust sensor 31, and the current sensor 32 are connected to the electric brake ECU 29.
- the electric brake ECU 29 (and the first ECU 10 and the second ECU 11 connected to the electric brake ECU 29 via the CAN 12) can acquire the rotation angle of the electric motor 23 based on the signal from the rotation angle sensor 30. ..
- the electric brake ECU 29 (and the first ECU 10 and the second ECU 11) can acquire the thrust acting on the piston 26 based on the signal from the thrust sensor 31.
- the electric brake ECU 29 (and the first ECU 10 and the second ECU 11) can acquire the motor current supplied to the electric motor 23 based on the signal from the current sensor 32.
- the first ECU 10 and the second ECU 11 give a command according to the depressing operation of the brake pedal 7 based on the detection signal input from the pedal stroke sensor 9.
- the target thrust corresponding to the braking application command is output to the electric brake ECU 29.
- the electric brake ECU 29 drives (rotates) the electric motor 23 in the forward direction, that is, in the braking applying direction (apply direction), based on the commands from the first ECU 10 and the second ECU 11.
- the rotation of the electric motor 23 is transmitted to the rotation linear motion conversion mechanism 25 via the reduction mechanism 24, and the piston 26 advances toward the brake pad 27.
- the brake pad 27 is pressed against the disc rotor D, and braking force is applied.
- the braking state is established by controlling the drive of the electric motor 23 by the detection signals from the pedal stroke sensor 9, the rotation angle sensor 30, the thrust sensor 31, and the like.
- a force in the braking release direction is applied to the rotating member of the rotary linear motion conversion mechanism 25, and by extension, the rotating shaft of the electric motor 23 by a return spring (not shown) provided in the braking mechanism 21. ..
- the first ECU 10 and the second ECU 11 output a command corresponding to this operation (for example, a target thrust corresponding to the braking release command) to the electric brake ECU 29.
- the electric brake ECU 29 drives (rotates) the electric motor 23 in the reverse direction, that is, in the braking release direction (release direction), based on the command from the first ECU 10.
- the rotation of the electric motor 23 is transmitted to the rotation linear motion conversion mechanism 25 via the reduction mechanism 24, and the piston 26 retracts in the direction away from the brake pad 27.
- the depression of the brake pedal 7 is completely released, the brake pad 27 is separated from the disc rotor D, and the braking force is released.
- the return spring (not shown) provided in the brake mechanism 21 returns to the initial state.
- the first ECU 10 and the second ECU 11 generate the braking force to be generated by the electric brake mechanisms 5 and 6, that is, the piston 26, based on the detection data from various sensors (for example, the pedal stroke sensor 9), the automatic braking command, and the like. Find the target thrust.
- the first ECU 10 and the second ECU 11 output a target thrust, which is a braking command, to the electric brake ECU 29.
- the electric brake ECU 29 feeds back the thrust detected by the thrust sensor 31 to the electric motor 23 so that the target thrust is generated by the piston 26, and the motor rotation detected by the rotation angle sensor 30. Position control is performed using the position as feedback.
- the brake mechanism 21 adjusts the thrust of the piston 26 based on the feedback signal from the thrust sensor 31 that measures the thrust of the piston 26 based on the braking force command (target thrust) from the first ECU 10 and the second ECU 11.
- I do. Therefore, there is a correlation between the braking force, the piston thrust, the torque (motor torque) of the electric motor 23, the current value, and the piston position (the rotation speed measurement value of the electric motor 23 by the rotation angle sensor 30).
- the thrust sensor 31 since the braking force varies depending on the environment and parts variation, it is desirable to control by the thrust sensor 31 that estimates the piston pressing force having a strong correlation with the braking force.
- the thrust sensor 31 receives the force in the thrust direction of the piston 26, deforms the metal bending body, and detects the amount of the strain.
- the strain sensor is a strain IC, which is formed of a Wheatstone bridge, an amplifier circuit, and a semiconductor process around a piezoresistive effect that detects strain at the center of the upper surface of a silicon chip.
- the strain sensor uses the piezoresistive effect to capture the strain applied to the strain sensor as a resistance change.
- the strain sensor may be configured by a strain gauge or the like.
- the vehicle 1 is provided between the prime mover 33, which is a power source for obtaining the propulsive force of the vehicle 1, and the right front wheel 3R of the vehicle 1 and the left front wheel 3L of the vehicle 1. It is provided with an electronically controlled differential gear 34 as a differential device.
- the prime mover 33 can be composed of, for example, an engine (internal combustion engine) alone, an engine and an electric motor, or an electric motor alone.
- the prime mover 33 outputs a driving force (rotation) for driving the vehicle 1.
- the prime mover 33 includes a prime mover control ECU (not shown) for controlling the prime mover 33.
- the prime mover control ECU is connected to the CAN 12.
- the driving force (rotation) of the prime mover 33 is transmitted to the left and right front wheels 3L and 3R, which are the driving wheels, via the reduction gear transmission (not shown), the electronically controlled differential gear 34, and the like.
- the right front wheel 3R of the vehicle 1 will be referred to as the first drive wheel of the vehicle 1, and the left front wheel 3L of the vehicle 1 will be referred to as the second drive wheel of the vehicle 1.
- One drive wheel may be used, and the right front wheel 3R of the vehicle 1 may be the second drive wheel.
- the electric brake mechanism 5R on the right front wheel 3R side of the vehicle 1 will be referred to as the first electric brake mechanism, and the electric brake mechanism 5L on the left front wheel 3L side of the vehicle 1 will be described as the second electric brake mechanism.
- the electric brake mechanism 5L on the front wheel 3L side may be used as the first electric brake mechanism, and the electric brake mechanism 5R on the right front wheel 3R side may be used as the second electric brake mechanism.
- the electric brake mechanism 5R on the right front wheel 3R side corresponding to the first electric brake mechanism is the first braking by the electric motor 23 on the right front wheel 3R side corresponding to the first motor with respect to the right front wheel 3R corresponding to the first drive wheel.
- a braking force is applied by propelling the brake pad 27 on the right front wheel 3R side corresponding to the member.
- the electric brake mechanism 5L on the left front wheel 3L side corresponding to the second electric braking mechanism is second braked by the electric motor 23 on the left front wheel 3L side corresponding to the second motor with respect to the left front wheel 3L corresponding to the second drive wheel.
- a braking force is applied by propelling the brake pad 27 on the left front wheel 3L side corresponding to the member.
- the "right side” is set to “first” and the “left side” is set to "second”, but the "right side” may be set to "second” and the "left side” may be set to "first”.
- the electronically controlled differential gear 34 transfers the rotation decelerated from the prime mover 33 via the reduction gear transmission (not shown) to the left axle shaft 35 connected to the left front wheel 3L and the right axle shaft 36 connected to the right front wheel 3R.
- the electronically controlled differential gear 34 has a clutch mechanism 37 that engages the left axle shaft 35 and the right axle shaft 36.
- the clutch mechanism 37 is a differential of the electronically controlled differential gear 34, that is, a limited slip differential (LSD) that limits the speed difference (difference in rotation speed) between the left axle shaft 35 and the right axle shaft 36.
- LSD limited slip differential
- the electronically controlled differential gear 34 includes an open differential gear and an LSD coupling.
- the electronically controlled differential gear 34 variably adjusts the speed difference between the left and right front wheels 3L and 3R by adjusting the engagement amount (engagement rate) of the clutch mechanism 37, that is, the direct connection rate of the axle shafts 35 and 36 ( Restrict.
- the electronically controlled differential gear 34 includes an electronically controlled differential gear control ECU 38 (also referred to as a differential ECU 38) that controls the engagement amount (engagement rate) of the clutch mechanism 37 that engages the axle shafts 35 and 36.
- the differential ECU 38 is connected to the first ECU 10 and the second ECU 11 via the CAN 12.
- the first ECU 10 and the second ECU 11 can instruct the differential ECU 38 of the fastening amount (fastening rate) via the CAN 12.
- a sufficient braking force for example, deceleration of 0.65 G or more
- the remaining braking force of the remaining system For example, when four wheels are hydraulic brakes and X piping, if one system fails, braking is performed only on two diagonal wheels, and the maximum theoretical braking force is, for example, 0.5 G.
- the maximum theoretical braking force is, for example, 0.5 G.
- the four wheels are electric brake mechanisms
- the ECUs for brake control are made redundant in two systems, it is necessary to drive three electric brake mechanisms with one ECU, which increases the complexity and cost. May lead to.
- the electric brake mechanism on the front wheel side is made redundant, for example, if the electric brake mechanism is a twin piston, two sets of piston / rotary linear motion converter / reduction gear / motor / inverter are required, which complicates and costs. It may lead to an increase.
- the electronically controlled differential gear 34 is utilized. That is, in the embodiment, by cooperating with another system (electronically controlled differential gear 34) in which the left and right axle shafts 35 and 36 are engaged by the clutch mechanism 37, sufficient braking force is secured even when one system fails. I am trying to do it. That is, in the embodiment, the braking force is secured by diff-locking when the diagonal wheel collapses, and both the redundancy of the electric brake and the suppression of the increase in the component cost are achieved.
- the vehicle 1 includes front wheel side electric brake mechanisms 5L and 5R, an electronically controlled differential gear 34, and a clutch mechanism 37.
- the front wheel side electric brake mechanisms 5L and 5R constitute a vehicle control system together with an electronically controlled differential gear 34, a clutch mechanism 37, a first ECU 10 and / or a second ECU 11.
- the control unit 10A of the first ECU 10 is the electric brake ECU 29 (right front electric brake ECU 29) of the "right front wheel 3R side electric brake mechanism 5R (right front electric brake mechanism 5R)" and the "left rear wheel 4L side electric brake mechanism 6L".
- a braking command is output to the electric brake ECU 29 (left rear electric brake ECU 29) of the (left rear electric brake mechanism 6L).
- the control unit 11A of the second ECU 11 is the electric brake ECU 29 (left front electric brake ECU 29) of the "left front wheel 3L side electric brake mechanism 5L (left front electric brake mechanism 5L)" and the "right rear wheel 4R side electric brake mechanism 6R".
- a calculation result (for example, a braking command) is output to the electric brake ECU 29 (right rear electric brake ECU 29) of the (right rear electric brake mechanism 6R).
- control unit 10A of the first ECU 10 controls the right front electric brake mechanism 5R and the left rear electric brake mechanism 6L
- the control unit 11A of the second ECU 11 controls the left front electric brake mechanism 5L and the right rear electric brake mechanism.
- Control 6R In this case, for example, if a failure related to the operation of the right front electric brake mechanism 5R and the left rear electric brake mechanism 6L occurs due to a failure of the first ECU 10, the braking force of the right front wheel 3R and the left rear wheel 4L are left as they are. The braking force of the left front wheel is lost, and only the braking force of the left front wheel 3L and the braking force of the right rear wheel 4R are obtained.
- a front-engine front-drive FF vehicle is vertical at a ratio of 0.7 for the left and right front wheels 3L and 3R and 0.3 for the left and right rear wheels 4L and 4R with respect to the total vehicle weight of 1.
- Drag (load) is applied.
- the friction braking force coefficient of friction
- the electronically controlled differential gears 34 (axle shafts 35 and 36) are fastened so that the braking force can be generated by the fallen wheel to which the normal force is applied.
- control is performed to increase the braking force in cooperation with another system (electronically controlled differential gear 34) that engages the left and right axle shafts 35 and 36 with the clutch mechanism 37.
- the remaining braking force at the time of one system failure is 0.5G as the theoretical braking force (front one system 0.35G).
- Rear 1 system 0.15G) can be improved to 0.85G (front 2 systems 0.35G x 2, rear 1 system 0.15G).
- the first ECU 10 (more specifically, the control unit 10A) performs the following vehicle control. That is, the first ECU 10 (control unit 10A) acquires information regarding a failure related to the operation of the left front electric brake mechanism 5L.
- Information related to the failure includes not only a control failure that makes it impossible to control the left front electric brake mechanism 5L due to a failure of the second ECU 11, but also a control failure such as a mechanical failure (mechanical failure) of the left front electric brake mechanism 5L.
- Information on other failures is also included. That is, the information related to the failure covers all the failures related to the left front electric brake mechanism 5L.
- the first ECU 10 acquires a physical quantity related to the required braking force applied to the left front wheel 3L and the right front wheel 3R.
- the required braking force includes, for example, not only the required braking force by the driver's braking operation but also the required braking force by the automatic braking command by the automatic driving.
- the physical quantity related to the required braking force is obtained based on the physical quantity related to the operating amount of the brake pedal 7 provided in the vehicle 1. That is, the required braking force can be obtained based on the stroke amount (pedal displacement amount) based on the stroke signal of the pedal stroke sensor 9.
- a pedal force sensor When a pedal force sensor is provided, it can be obtained as a physical quantity related to the required braking force based on the pedal pedal force by the pedal force sensor. Further, the required braking force can be obtained based on the automatic braking command value (for example, target deceleration) by the automatic braking.
- the automatic braking command value for example, target deceleration
- the first ECU 10 (control unit 10A) is a differential ECU 38 that controls the clutch mechanism 37 (more specifically, the clutch mechanism 37) based on the information regarding the failure and the physical quantity (for example, the stroke amount) regarding the required braking force. ), A differential limiting control command for limiting the differential of the electronically controlled differential gear 34 is output.
- the first ECU 10 (control unit 10A) applies the braking force of the right front electric brake mechanism 5R not only to the right front wheel 3R but also to the left front wheel 3L via the electronically controlled differential gear 34 (clutch mechanism 37). Can be granted.
- the first ECU 10 propulsion force of the brake pad 27 of the right front electric brake mechanism 5R with respect to the stroke amount when the information on the failure is not acquired.
- a control command for controlling the electric motor 23 of the right front electric brake mechanism 5R is output so that the propulsive force of the brake pad 27 of the right front electric brake mechanism 5R is larger than the stroke amount.
- the required braking force is high (the stroke amount is large) and the vehicle travels in a straight line
- the right front electric braking mechanism 5R applies a braking force twice as much as the normal required braking force (when there is no failure).
- the differential limit (fastening amount) of the electronically controlled differential gear 34 can be set to 100%.
- the second ECU 11 performs the following vehicle control. That is, the second ECU 11 (control unit 11A) acquires information regarding the failure related to the operation of the right front electric brake mechanism 5R.
- the information related to the failure is not only the control failure that makes it impossible to control the right front electric brake mechanism 5R due to the failure of the first ECU 10, but also the control failure such as the mechanical failure (mechanical failure) of the right front electric brake mechanism 5R. Information on other failures is also included. That is, the information related to the failure covers all the failures related to the left front electric brake mechanism 5L.
- the second ECU 11 acquires a physical quantity (for example, a stroke amount) related to the required braking force applied to the right front wheel 3R and the left front wheel 3L. Then, the second ECU 11 (control unit 11A) is a differential ECU 38 that controls the clutch mechanism 37 (more specifically, the clutch mechanism 37) based on the information regarding the failure and the physical quantity (for example, the stroke amount) regarding the required braking force. ), A differential limiting control command for limiting the differential of the electronically controlled differential gear 34 is output.
- a physical quantity for example, a stroke amount
- the second ECU 11 compares the propulsive force of the brake pad 27 of the left front electric brake mechanism 5L with respect to the physical quantity (for example, the stroke amount) related to the required braking force as compared with the case where the information regarding the failure is not acquired. And make it larger (for example, double it when it is normal).
- FIG. 3 shows a control flow for fastening the electronically controlled differential gear 34 to secure braking force and ensuring vehicle stability.
- a failure related to the operation of the right front electric brake mechanism 5R (and the left rear electric brake mechanism 6L) occurs due to the failure of the first ECU 10 will be described as an example. That is, a flow chart (flow chart) of FIG. 3 will be described as a control process performed by the second ECU 11 (control unit 11A) when a failure related to the operation of the right front electric brake mechanism 5R occurs due to a failure of the first ECU 10. ..
- the control process of FIG. 3 is performed by the first ECU 10 (control unit 10A), and the braking force of the right front electric brake mechanism 5R is applied not only to the right front wheel 3R but also to the electronically controlled differential gear 34 ( It is also applied to the left front wheel 3L via the clutch mechanism 37).
- the target braking force is calculated in S1. That is, when the first ECU 10 fails, when the driver depresses the brake pedal 7, the pedal stroke sensor 9 detects the depressing amount, and the signal of the pedal stroke sensor 9 is functioning normally via the CAN 12. 2 Received by ECU 11. Further, the second ECU 11 may receive a signal of an automatic braking command by the automatic braking (AD / ADAS) via the CAN 12. The second ECU 11 calculates a target braking force (target deceleration) based on the sensor signal value received in S1 (or the signal value of the automatic brake received from a higher-level controller such as an automatic operation ECU).
- a target braking force target deceleration
- the pitching of the vehicle 1 is calculated from the specifications of the vehicle 1 to calculate the front-rear braking force distribution.
- the braking force limiter is controlled based on the road surface environment and the like. That is, in S2 and S3, the distribution of the braking force between the front wheels 3L, 3R side and the rear wheels 4L, 4R side is determined according to the slip limit ratio while considering the load transfer of the vehicle 1, and the braking force is determined.
- the slip limit deceleration of each wheel 3L, 3R, 4L, 4R is calculated from the distribution of. For example, the braking force is distributed 7: 3 on the front wheels 3L, 3R side and the rear wheels 4L, 4R side.
- the slip limit of one of the front wheels 3L and 3R is 0.35G
- the slip limit of one of the rear wheels 4L and 4R is 0.15G.
- This slip limit can be adjusted according to the road surface condition and the like. For example, on wet roads, the slip limit can be made smaller than on dry roads.
- FIG. 4 is an explanatory view (plan view of the vehicle 1 viewed from above) showing the braking force of the vehicle 1 and the moment based on the braking force. As shown in FIG.
- the distance between the center of gravity axis G and the front wheels 3L and 3R is defined as “Lf”, and the distance between the center of gravity axis G and the rear wheels 4L and 4R is defined as “Lr”.
- the braking force of the left front wheel 3L is "BFfl”
- the sum of the braking force "BFfl”, “BFfr”, and “BFrr” is the target braking force "BF”. Therefore, the target braking force "BF” can be expressed by the equation (3).
- the ideal braking force distribution ratio " ⁇ " is "front wheel side braking force / rear wheel side braking force”. Therefore, the equation 4 can be obtained.
- the DEF fastening force (fastening amount, fastening rate) is calculated. That is, based on the braking force "BFfl" of the left front wheel 3L and the braking force "BFfr" of the right front wheel 3R calculated in S4, the engagement rate command value (clutch amount command) of the electronically controlled differential gear 34 (clutch mechanism 37) Value) is calculated, and a command is output to the differential ECU 38 via the CAN 12.
- the engagement rate (coupling rate) of the clutch mechanism 37 is calculated from the distribution of the braking forces of the left and right front wheels 3L and 3R calculated in S4.
- the clutch mechanism 37 of the electronically controlled differential gear 34 is controlled by a transmission rate of abnormal wheel braking force / normal wheel braking force ⁇ 100%.
- thrust feedback control is performed by the piston thrust command value obtained by adding the braking force on the right front wheel side to the piston thrust command value on the left front wheel side that applies the braking force in the normal state.
- the piston thrust according to the braking force is calculated from the effective radius of the disc, the effective radius of the tire, the pad ⁇ , and the normal force obtained from the vehicle specifications.
- Thrust feedback control is performed in S6, and the thrust returns. That is, the process returns to the start via the end, and the processing after S1 is repeated.
- FIG. 8 shows an example of braking force distribution when ideal braking that does not generate yaw rate is performed based on the specifications of the actual vehicle.
- the engagement rate of the electronically controlled differential gear 34 (clutch mechanism 37) is about 57%.
- the generated braking force can be controlled up to 0.7 G without generating yaw rate, and sufficient braking force can be generated even when one brake system fails.
- FIG. 6 shows an example of the relationship between the vehicle speed and the differential fastening amount.
- FIG. 7 shows an example of the relationship between the steering angle and the differential fastening amount.
- the select low control the smaller of the fastening amount according to the vehicle speed and the fastening amount according to the steering angle at that time is selected, and the fastening amount is used as the fastening amount to electronically control the differential gear 34 (clutch mechanism 37).
- the magnitude of the differential limit can be adjusted by a preset relationship (characteristic map of FIG. 6 or 7) based on the vehicle speed and the steering angle (steering angle, turning state). ..
- the second ECU 11 has an electronically controlled differential gear 34 (clutch) according to the magnitude of a physical quantity (for example, a stroke amount) with respect to the required braking force (target braking force).
- a command (differential limit control command) is output to the differential ECU 38 so that the magnitude of the differential limit (fastening amount) of the mechanism 37) changes.
- the second ECU 11 controls the differential (engagement amount) of the electronically controlled differential gear 34 (clutch mechanism 37) as the target braking force (stroke amount) increases. ) Is increased (approaching the locked state), and a command (differential limit control command) is output to the differential ECU 38.
- the second ECU 11 limits the differential (engagement amount) of the electronically controlled differential gear 34 (clutch mechanism 37) according to the magnitude of the speed (vehicle speed) of the vehicle 1.
- a command (differential limit control command) is output to the differential ECU 38 so that the magnitude of) changes.
- the second ECU 11 limits the differential (engagement amount) of the electronically controlled differential gear 34 (clutch mechanism 37) as the speed (vehicle speed) of the vehicle 1 increases. ) Is output to the differential ECU 38 so that the magnitude of) becomes large.
- the second ECU 11 has a difference in the electronically controlled differential gear 34 (clutch mechanism 37) according to the magnitude of the steering angle (steering angle, steering amount) of the vehicle 1.
- a command (differential limit control command) is output to the differential ECU 38 so that the magnitude of the movement limit (fastening amount) changes.
- the second ECU 11 (control unit 11A) limits the differential (engagement amount) of the electronically controlled differential gear 34 (clutch mechanism 37) as the steering angle of the vehicle 1 increases.
- a command (differential limit control command) is output to the differential ECU 38 so that the magnitude of the is reduced.
- the second ECU 11 has "information on the failure of the right front electric brake mechanism 5R" and "physical quantity (for example, stroke amount) related to the required braking force (target braking force)".
- a differential limit control command is output to the differential ECU 38 of the electronically controlled differential gear 34 (clutch mechanism 37). Therefore, when the right front electric brake mechanism 5R fails, by limiting the differential of the electronically controlled differential gear 34, the braking force of the left front electric brake mechanism 5L is applied not only to the left front wheel 3L but also to the electric power. It can also be applied to the right front wheel 3R via the control differential gear 34 (clutch mechanism 37).
- the function of making the electric brake mechanisms 5L and 5R redundant can be ensured.
- the required braking force (target) is compared with the case where the information regarding the failure is not acquired.
- the propulsive force of the brake pad 27 of the left front electric brake mechanism 5L with respect to the physical quantity (for example, the stroke amount) relating to the braking force) is increased.
- the braking force of the left front electric brake mechanism 5L with respect to the physical amount related to the required braking force becomes large, and the large braking force of the left front electric braking mechanism 5L is applied to the left front wheel 3L and the right front wheel. It can be given to 3R.
- the second ECU 11 (control unit 11A) has a magnitude of the differential limit of the electronically controlled differential gear 34 according to the magnitude of the physical quantity (for example, the stroke amount) with respect to the required braking force (target braking force). change. Therefore, the distribution of the braking force to the left front wheel 3L and the right front wheel 3R applied by the left front electric braking mechanism 5L can be adjusted according to the magnitude of the physical quantity related to the required braking force.
- the second ECU 11 limits the differential of the electronically controlled differential gear 34 as the magnitude of the physical quantity (for example, the stroke amount) with respect to the required braking force (target braking force) increases. Increase the size. Therefore, as the magnitude of the physical quantity related to the required braking force increases, the braking force of the right front wheel 3R applied by the left front electric brake mechanism 5L can be increased.
- the second ECU 11 changes the magnitude of the differential limit of the electronically controlled differential gear 34 according to the magnitude of the speed (vehicle speed) of the vehicle 1. Therefore, the distribution of the braking force to the left front wheel 3L and the right front wheel 3R applied by the left front electric brake mechanism 5L can be adjusted according to the magnitude of the speed of the vehicle 1. Further, the bendability (difficulty of bending) of the vehicle 1 can be adjusted by limiting the differential of the electronically controlled differential gear 34 according to the magnitude of the speed of the vehicle 1.
- the second ECU 11 increases the magnitude of the differential limit of the electronically controlled differential gear 34 as the speed of the vehicle 1 increases. Therefore, as the speed of the vehicle 1 increases, the braking force of the right front wheel 3R applied by the left front electric brake mechanism 5L can be increased. Further, when the speed of the vehicle 1 is low, the magnitude of the differential limit is small, so that the vehicle 1 can be easily bent at a low speed where the braking force may be small.
- the second ECU 11 changes the magnitude of the differential limit of the electronically controlled differential gear 34 according to the magnitude of the steering angle of the vehicle 1. Therefore, the distribution of the braking force to the left front wheel 3L and the right front wheel 3R applied by the left front electric brake mechanism 5L can be adjusted according to the magnitude of the steering angle of the vehicle 1. Further, the bendability (difficulty of bending) of the vehicle 1 can be adjusted by limiting the differential of the electronically controlled differential gear 34 according to the magnitude of the steering angle of the vehicle 1.
- the second ECU 11 reduces the magnitude of the differential limit of the electronically controlled differential gear 34 as the steering angle of the vehicle 1 increases. Therefore, as the steering angle of the vehicle 1 increases, the braking force of the right front wheel 3R applied by the left front electric brake mechanism 5L can be reduced. Further, the larger the steering angle of the vehicle 1, the easier it is to turn the vehicle 1.
- the physical quantity related to the required braking force is obtained based on the physical quantity (stroke amount) related to the operating amount of the brake pedal 7 provided in the vehicle 1. Therefore, the second ECU 11 (control unit 11A) uses the electronically controlled differential gear 34 (clutch) based on "information on the failure of the right front electric brake mechanism 5R" and "physical quantity (stroke amount) related to the operation amount of the brake pedal 7".
- a differential limit control command can be output to the differential ECU 38 of the mechanism 37).
- the first driving wheel is the right front wheel 3R
- the second driving wheel is the left front wheel 3L. Therefore, when the right front electric brake mechanism 5R on the right front wheel 3R side collapses, by limiting the differential of the electronically controlled differential gear 34, the braking force by the left front electric brake mechanism 5L on the left front wheel 3L side is reduced to the left. It can be applied not only to the front wheel 3L but also to the right front wheel 3R via the clutch mechanism 37.
- the first driving wheel is the right front wheel 3R and the second driving wheel is the left front wheel 3L has been described as an example.
- the present invention is not limited to this, and for example, the first driving wheel may be the left front wheel and the second driving wheel may be the right front wheel. Further, it may be used not only for a front-wheel drive vehicle but also for a rear-wheel drive vehicle. That is, the first drive wheel may be the left rear wheel and the second drive wheel may be the right rear wheel. Further, the first driving wheel may be the right rear wheel and the second driving wheel may be the left rear wheel.
- the two-wheel drive vehicle 1 has been described as an example, but the vehicle may be a four-wheel drive vehicle.
- control unit 10A of the first ECU 10 controls the right front electric brake mechanism 5R and the left rear electric brake mechanism 6L
- the control unit 11A of the second ECU 11 controls the left front electric brake mechanism 5L and the right rear electric brake mechanism 6R.
- the control unit of the first ECU controls the left front electric brake mechanism and the right rear electric brake mechanism
- the control unit of the second ECU controls the right front electric brake mechanism and the left rear electric brake mechanism. good.
- the first ECU 10 and the second ECU 11 which are ECUs for brake control, are each provided with a control unit that outputs a differential limit control command based on information on a failure and information on a required braking force.
- the present invention is not limited to this, and for example, only one of the first ECU 10 and the second ECU 11 (that is, the first ECU 10 or the second ECU 11) may be provided with a control unit.
- the control unit may be provided in an ECU other than the brake control ECU, such as an automatic braking ECU or a vehicle collapse ECU. That is, the control unit can be configured to be provided in any ECU mounted on the vehicle.
- the vehicle control device As the vehicle control device, the vehicle control method, and the vehicle control system based on the above-described embodiment, for example, the ones described below can be considered.
- the first aspect is a vehicle control device, which is provided in the vehicle and includes a control unit that performs a calculation based on the input information and outputs a calculation result, and the vehicle is the vehicle.
- a differential device provided between the first drive wheel of the vehicle and the second drive wheel of the vehicle, a differential limiting mechanism for limiting the differential of the differential device, and the first drive wheel.
- the first electric brake mechanism that propels the first braking member with the first motor to apply the braking force
- the second braking member that propels the second braking member with respect to the second drive wheel to apply the braking force.
- a second electric brake mechanism is provided, and the control unit acquires information on a failure related to the operation of the first electric brake mechanism and gives it to the first drive wheel and the second drive wheel.
- the differential limiting mechanism is given a differential limiting control command for limiting the differential of the differential device. Output.
- the control unit outputs a differential limiting control command to the differential limiting mechanism based on "information about the failure" and "physical quantity related to the required braking force". Therefore, when the first electric brake mechanism fails, by limiting the differential of the differential device, the braking force of the second electric brake mechanism is applied not only to the second drive wheel but also to the differential. It can also be applied to the first drive wheel via the limiting mechanism. As a result, the function of making the electric brake mechanism redundant can be ensured. Moreover, in order to secure the function of redundancy, it is not necessary to make the motor a dual system, and it is possible to suppress an increase in component cost.
- the control unit when the control unit acquires the information about the failure, the second aspect with respect to the physical quantity related to the required braking force when the information about the failure is not acquired.
- a control command for controlling the second motor is output so that the propulsive force of the second braking member is larger than the propulsive force of the braking member with respect to the physical quantity related to the required braking force.
- the propulsive force of the second braking member with respect to the physical quantity related to the required braking force becomes larger than when the information on the failure is not acquired.
- the braking force of the second electric brake mechanism with respect to the physical amount related to the required braking force becomes large, and the large braking force of the second electric brake mechanism is applied to the second drive wheel and the second drive wheel. It can be applied to one drive wheel.
- control unit performs the differential so that the magnitude of the differential limit of the differential device changes according to the magnitude of the physical quantity related to the required braking force. Outputs a limit control command.
- the distribution of the braking force to the second driving wheel and the first driving wheel given by the second electric braking mechanism can be adjusted according to the magnitude of the physical quantity related to the required braking force.
- control unit increases the magnitude of the differential limit of the differential device as the magnitude of the physical quantity related to the required braking force increases.
- the differential limit control command is output.
- the braking force of the first drive wheel applied by the second electric braking mechanism can be increased.
- control unit controls the differential limitation so that the magnitude of the differential limitation of the differential device changes according to the magnitude of the speed of the vehicle. Output the command.
- the distribution of the braking force applied to the second drive wheel and the first drive wheel by the second electric brake mechanism can be adjusted according to the magnitude of the speed of the vehicle. Further, the ease of bending (difficulty of bending) of the vehicle due to the differential limitation of the differential device can be adjusted according to the magnitude of the speed of the vehicle.
- control unit controls the differential limit so that the magnitude of the differential limit of the differential device increases as the speed of the vehicle increases. Output the command.
- the braking force of the first drive wheel applied by the second electric brake mechanism can be increased. Further, when the speed of the vehicle is low, the magnitude of the differential limit is small, so that it is possible to ensure the ease of bending of the vehicle at a low speed where the braking force may be small.
- control unit performs the differential so that the magnitude of the differential limit of the differential device changes according to the magnitude of the steering angle of the vehicle. Output a limit control command.
- the distribution of the braking force applied to the second drive wheel and the first drive wheel by the second electric brake mechanism can be adjusted according to the magnitude of the steering angle of the vehicle. Further, the bendability (difficulty of turning) of the vehicle can be adjusted by limiting the differential of the differential device according to the magnitude of the steering angle of the vehicle.
- control unit performs the differential so that the magnitude of the differential limitation of the differential device decreases as the steering angle of the vehicle increases. Output a limit control command.
- the braking force of the first driving wheel applied by the second electric braking mechanism can be reduced as the steering angle of the vehicle increases. Further, the larger the steering angle of the vehicle, the easier it is to turn the vehicle.
- the physical quantity related to the required braking force is obtained based on the physical quantity related to the operation amount of the brake operating member provided in the vehicle.
- the differential limiting control command can be output to the differential limiting mechanism based on the "information about the failure” and the "physical quantity related to the operating amount of the brake operating member".
- the first driving wheel is a right front wheel and the second driving wheel is a left front wheel.
- the braking force by the second electric brake mechanism on the left front wheel side is applied by limiting the differential of the differential device. , Not only for the left front wheel, but also for the right front wheel via the differential limiting mechanism.
- the eleventh aspect is a vehicle control method for a vehicle, wherein the vehicle includes a differential device provided between a first drive wheel of the vehicle and a second drive wheel of the vehicle, and the above-mentioned differential device.
- a differential limiting mechanism that limits the differential of the differential device, a first electric braking mechanism that propels the first braking member with the first motor to apply braking force to the first driving wheel, and the second.
- the vehicle control method includes a second electric brake mechanism for propelling a second braking member with a second motor to the drive wheels to apply a braking force, and the vehicle control method is a failure related to the operation of the first electric brake mechanism.
- a differential limiting control command for limiting the differential of the differential device is output to the dynamic limiting mechanism.
- a differential limiting control command is output to the differential limiting mechanism based on "information about the failure" and "physical quantity related to the required braking force". Therefore, when the first electric brake mechanism fails, by limiting the differential of the differential device, the braking force of the second electric brake mechanism is applied not only to the second drive wheel but also to the differential. It can also be applied to the first drive wheel via the limiting mechanism. As a result, the function of making the electric brake mechanism redundant can be ensured. Moreover, in order to secure the function of redundancy, it is not necessary to make the motor a dual system, and it is possible to suppress an increase in component cost.
- the vehicle control system limits the differential between the first drive wheel of the vehicle and the second drive wheel of the vehicle, and the differential of the differential device.
- the second electric brake mechanism that propels the second braking member to apply braking force, and the controller that acquires information on the failure related to the operation of the first electric brake mechanism, and obtains the first drive wheel and the said.
- the physical quantity relating to the required braking force applied to the second drive wheel is acquired, and the differential of the differential device is limited to the differential limiting mechanism based on the information regarding the failure and the physical quantity relating to the required braking force.
- the controller is provided with a differential limit control command for outputting a differential limit control command.
- the controller outputs a differential limiting control command to the differential limiting mechanism based on "information about the failure" and "physical quantity related to the required braking force". Therefore, when the first electric brake mechanism fails, by limiting the differential of the differential device, the braking force of the second electric brake mechanism is applied not only to the second drive wheel but also to the differential. It can also be applied to the first drive wheel via the limiting mechanism. As a result, the function of making the electric brake mechanism redundant can be ensured. Moreover, in order to secure the function of redundancy, it is not necessary to make the motor a dual system, and it is possible to suppress an increase in component cost.
- the present invention is not limited to the above-described embodiment, and includes various modifications.
- the above-described embodiment has been described in detail in order to explain the present invention in an easy-to-understand manner, and is not necessarily limited to the one including all the described configurations.
- it is possible to replace a part of the configuration of one embodiment with the configuration of another embodiment and it is also possible to add the configuration of another embodiment to the configuration of one embodiment.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Transportation (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- General Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Human Computer Interaction (AREA)
- Regulating Braking Force (AREA)
Abstract
Description



Claims (12)
- 車両制御装置であって、該車両制御装置は、
車両に設けられ、入力した情報に基づいて演算を行って演算結果を出力するコントロール部を備え、
前記車両は、
該車両の第1駆動輪と、前記車両の第2駆動輪と、の間に設けられた差動装置と、
前記差動装置の差動を制限する差動制限機構と、
前記第1駆動輪に対して第1モータで第1制動部材を推進させて制動力を付与する第1電動ブレーキ機構と、
前記第2駆動輪に対して第2モータで第2制動部材を推進させて制動力を付与する第2電動ブレーキ機構と、
を備え、
前記コントロール部は、
前記第1電動ブレーキ機構の作動に関わる失陥に関する情報を取得し、
前記第1駆動輪と前記第2駆動輪に付与する要求制動力に関する物理量を取得し、
前記失陥に関する情報と、前記要求制動力に関する物理量と、に基づいて、前記差動制限機構に前記差動装置の差動を制限するための差動制限制御指令を出力する、
車両制御装置。 - 請求項1に記載の車両制御装置であって、
前記コントロール部は、
前記失陥に関する情報を取得した場合、前記失陥に関する情報を取得していない場合の前記要求制動力に関する物理量に対する前記第2制動部材の推進力と比較して、前記要求制動力に関する物理量に対する前記第2制動部材の推進力が大きくなるように前記第2モータを制御するための制御指令を出力する、
車両制御装置。 - 請求項1に記載の車両制御装置であって、
前記コントロール部は、
前記要求制動力に関する物理量の大きさに応じて、前記差動装置の差動の制限の大きさが変わるように前記差動制限制御指令を出力する、
車両制御装置。 - 請求項3に記載の車両制御装置であって、
前記コントロール部は、
前記要求制動力に関する物理量の大きさが大きくなるにしたがって、前記差動装置の差動の制限の大きさが大きくなるように前記差動制限制御指令を出力する、
車両制御装置。 - 請求項1に記載の車両制御装置であって、
前記コントロール部は、
前記車両の速度の大きさに応じて、前記差動装置の差動の制限の大きさが変わるように前記差動制限制御指令を出力する、
車両制御装置。 - 請求項5に記載の車両制御装置であって、
前記コントロール部は、
前記車両の速度が大きくなるにしたがって、前記差動装置の差動の制限の大きさが大きくなるように前記差動制限制御指令を出力する、
車両制御装置。 - 請求項1に記載の車両制御装置であって、
前記コントロール部は、
前記車両の転舵角の大きさに応じて、前記差動装置の差動の制限の大きさが変わるように前記差動制限制御指令を出力する、
車両制御装置。 - 請求項7に記載の車両制御装置であって、
前記コントロール部は、
前記車両の転舵角が大きくなるにしたがって、前記差動装置の差動の制限の大きさが小さくなるように前記差動制限制御指令を出力する、
車両制御装置。 - 請求項1に記載の車両制御装置であって、
前記要求制動力に関する物理量は、前記車両に設けられたブレーキ操作部材の操作量に関する物理量に基づいて求められる、
車両制御装置。 - 請求項1に記載の車両制御装置であって、
前記第1駆動輪は右前輪であり、前記第2駆動輪は左前輪である、
車両制御装置。 - 車両の車両制御方法であって、
前記車両は、
該車両の第1駆動輪と、前記車両の第2駆動輪と、の間に設けられた差動装置と、
前記差動装置の差動を制限する差動制限機構と、
前記第1駆動輪に対して第1モータで第1制動部材を推進させて制動力を付与する第1電動ブレーキ機構と、
前記第2駆動輪に対して第2モータで第2制動部材を推進させて制動力を付与する第2電動ブレーキ機構と、を備え、
前記車両制御方法は、
前記第1電動ブレーキ機構の作動に関わる失陥に関する情報を取得し、
前記第1駆動輪と前記第2駆動輪に付与する要求制動力に関する物理量を取得し、
前記失陥に関する情報と、前記要求制動力に関する物理量と、に基づいて、前記差動制限機構に前記差動装置の差動を制限するための差動制限制御指令を出力する、
車両制御方法。 - 車両制御システムであって、該車両制御システムは、
車両の第1駆動輪と、前記車両の第2駆動輪と、の間に設けられた差動装置と、
前記差動装置の差動を制限する差動制限機構と、
前記第1駆動輪に対して第1モータで第1制動部材を推進させて制動力を付与する第1電動ブレーキ機構と、
前記第2駆動輪に対して第2モータで第2制動部材を推進させて制動力を付与する第2電動ブレーキ機構と、
コントローラであって、
前記第1電動ブレーキ機構の作動に関わる失陥に関する情報を取得し、
前記第1駆動輪と前記第2駆動輪に付与する要求制動力に関する物理量を取得し、
前記失陥に関する情報と、前記要求制動力に関する物理量と、に基づいて、前記差動制限機構に前記差動装置の差動を制限するための差動制限制御指令を出力する、
前記コントローラと、を備える車両制御システム。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US17/792,263 US11801849B2 (en) | 2020-01-17 | 2021-01-13 | Vehicle control device, vehicle control method, and vehicle control system |
| DE112021000572.3T DE112021000572T5 (de) | 2020-01-17 | 2021-01-13 | Fahrzeugsteuergerät, Fahrzeugsteuerverfahren und Fahrzeugsteuersystem |
| CN202180009399.8A CN114981141A (zh) | 2020-01-17 | 2021-01-13 | 车辆控制装置、车辆控制方法以及车辆控制系统 |
| KR1020227016989A KR20220087502A (ko) | 2020-01-17 | 2021-01-13 | 차량 제어 장치, 차량 제어 방법 및 차량 제어 시스템 |
| JP2021571203A JP7312859B2 (ja) | 2020-01-17 | 2021-01-13 | 車両制御装置、車両制御方法および車両制御システム |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020-005812 | 2020-01-17 | ||
| JP2020005812 | 2020-01-17 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2021145335A1 true WO2021145335A1 (ja) | 2021-07-22 |
Family
ID=76863769
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2021/000796 WO2021145335A1 (ja) | 2020-01-17 | 2021-01-13 | 車両制御装置、車両制御方法および車両制御システム |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US11801849B2 (ja) |
| JP (1) | JP7312859B2 (ja) |
| KR (1) | KR20220087502A (ja) |
| CN (1) | CN114981141A (ja) |
| DE (1) | DE112021000572T5 (ja) |
| WO (1) | WO2021145335A1 (ja) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102637909B1 (ko) * | 2019-01-23 | 2024-02-19 | 에이치엘만도 주식회사 | 전동식 파워 스티어링 시스템의 리던던시 회로 |
| US12115957B2 (en) * | 2019-04-22 | 2024-10-15 | Hitachi Astemo, Ltd. | Control apparatus |
| KR20210044624A (ko) * | 2019-10-15 | 2021-04-23 | 주식회사 만도 | 전자식 주차 브레이크 시스템 및 그 제어방법 |
| KR20220096438A (ko) * | 2020-12-31 | 2022-07-07 | 현대모비스 주식회사 | 자율주행 차량의 브레이크 시스템 및 그 제어방법 |
| US20230278536A1 (en) * | 2021-02-22 | 2023-09-07 | Jiangsu University | Brake-shift integrated system for wire-controlled vehicles based on machine-hydraulic compound and control method thereof |
| KR20230058241A (ko) * | 2021-10-22 | 2023-05-03 | 현대자동차주식회사 | 전동화 차량의 회생 제동 제어 장치 및 방법 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04176764A (ja) * | 1990-11-13 | 1992-06-24 | Honda Motor Co Ltd | 車両のブレーキ制御装置 |
| JP2006205912A (ja) * | 2005-01-28 | 2006-08-10 | Toyota Motor Corp | 制動力制御装置 |
| JP2019038286A (ja) * | 2017-08-22 | 2019-03-14 | トヨタ自動車株式会社 | 電子制御ブレーキシステム |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6297975A (ja) * | 1985-10-25 | 1987-05-07 | 花王株式会社 | 合成繊維処理用油剤 |
| JP3380315B2 (ja) * | 1993-02-17 | 2003-02-24 | マツダ株式会社 | 差動制限装置とアンチスキッドブレーキを備えた車両の制御装置 |
| FR2705286B1 (fr) * | 1993-05-18 | 1995-09-08 | Smh Management Services Ag | Véhicule comprenant un système de freinage électrique et mécanique. |
| JP3365301B2 (ja) * | 1998-03-19 | 2003-01-08 | トヨタ自動車株式会社 | 車両の制動エネルギー制御装置とその制御方法 |
| JP4288501B2 (ja) | 2004-09-30 | 2009-07-01 | 株式会社日立製作所 | 電動ブレーキ装置 |
| JP4176764B2 (ja) | 2005-11-29 | 2008-11-05 | Tdk株式会社 | ノイズ吸収装置 |
| DE102013113685B4 (de) * | 2013-05-15 | 2020-06-04 | GM Global Technology Operations, LLC (n.d. Ges. d. Staates Delaware) | Verfahren und system zum steuern einer fahrzeugrichtung durch optimales kombinieren von funktionen des elektrischen feststellbrems- und hyraulikbremssubsystems |
| JP6765595B2 (ja) | 2018-07-05 | 2020-10-07 | 株式会社北電子 | 遊技機 |
-
2021
- 2021-01-13 WO PCT/JP2021/000796 patent/WO2021145335A1/ja active Application Filing
- 2021-01-13 KR KR1020227016989A patent/KR20220087502A/ko unknown
- 2021-01-13 US US17/792,263 patent/US11801849B2/en active Active
- 2021-01-13 CN CN202180009399.8A patent/CN114981141A/zh active Pending
- 2021-01-13 JP JP2021571203A patent/JP7312859B2/ja active Active
- 2021-01-13 DE DE112021000572.3T patent/DE112021000572T5/de active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04176764A (ja) * | 1990-11-13 | 1992-06-24 | Honda Motor Co Ltd | 車両のブレーキ制御装置 |
| JP2006205912A (ja) * | 2005-01-28 | 2006-08-10 | Toyota Motor Corp | 制動力制御装置 |
| JP2019038286A (ja) * | 2017-08-22 | 2019-03-14 | トヨタ自動車株式会社 | 電子制御ブレーキシステム |
Also Published As
| Publication number | Publication date |
|---|---|
| US11801849B2 (en) | 2023-10-31 |
| DE112021000572T5 (de) | 2022-12-15 |
| JPWO2021145335A1 (ja) | 2021-07-22 |
| JP7312859B2 (ja) | 2023-07-21 |
| CN114981141A (zh) | 2022-08-30 |
| KR20220087502A (ko) | 2022-06-24 |
| US20230042441A1 (en) | 2023-02-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2021145335A1 (ja) | 車両制御装置、車両制御方法および車両制御システム | |
| JP6871398B2 (ja) | ブレーキ装置、車両の制御装置及び電動ブレーキ制御装置 | |
| US7949456B2 (en) | Turning control apparatus for vehicle | |
| US7328955B2 (en) | Control device for four-wheel drive vehicle | |
| US7797094B2 (en) | Turning control apparatus for vehicle | |
| CN100343108C (zh) | 车辆稳定性控制设备 | |
| US7885751B2 (en) | Vehicle integrated control apparatus integrally executing vehicle driving support control, driving force control, and braking force control | |
| WO2020262278A1 (ja) | 電動ブレーキ装置、ブレーキ制御装置および制御パラメータ較正方法 | |
| CN109927700B (zh) | 一种纯线控汽车制动系统 | |
| WO2006073206A1 (ja) | 半導体装置用ボンディングワイヤ | |
| JP2008516843A (ja) | 全車輪駆動システム | |
| US10773706B2 (en) | Apparatus for controlling four-wheel drive vehicle | |
| US7637331B2 (en) | Steering device for vehicle | |
| JP4164691B2 (ja) | 車輌の統合制御装置 | |
| US20230124821A1 (en) | Longitudinal overlay while using brake-to-steer | |
| US20230070909A1 (en) | Vehicle control apparatus, vehicle control method, and vehicle control system | |
| JP4978447B2 (ja) | 車両運動制御システム | |
| WO2023210182A1 (ja) | 車両制御装置、車両制御方法および車両制御システム | |
| JP4193534B2 (ja) | 差動制限制御装置 | |
| JP5176569B2 (ja) | 車両の制動制御装置 | |
| KR20240025101A (ko) | 전기 차량의 제어 장치 및 방법 | |
| WO2024091815A1 (en) | Vehicle brake system, vehicle including vehicle brake system, and method for operating a vehicle | |
| WO2020131749A1 (en) | Drivetrain torque deceleration | |
| JP2004284418A (ja) | ブレーキ制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 21741689 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2021571203 Country of ref document: JP Kind code of ref document: A |
|
| ENP | Entry into the national phase |
Ref document number: 20227016989 Country of ref document: KR Kind code of ref document: A |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 21741689 Country of ref document: EP Kind code of ref document: A1 |