WO2021117320A1 - コイル及びそれを備えたモータ - Google Patents
コイル及びそれを備えたモータ Download PDFInfo
- Publication number
- WO2021117320A1 WO2021117320A1 PCT/JP2020/037389 JP2020037389W WO2021117320A1 WO 2021117320 A1 WO2021117320 A1 WO 2021117320A1 JP 2020037389 W JP2020037389 W JP 2020037389W WO 2021117320 A1 WO2021117320 A1 WO 2021117320A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- coil
- rotor
- turns
- nth
- motor
- Prior art date
Links
Images

















Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K21/00—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets
- H02K21/12—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets with stationary armatures and rotating magnets
- H02K21/14—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets with stationary armatures and rotating magnets with magnets rotating within the armatures
- H02K21/16—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets with stationary armatures and rotating magnets with magnets rotating within the armatures having annular armature cores with salient poles
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K3/00—Details of windings
- H02K3/04—Windings characterised by the conductor shape, form or construction, e.g. with bar conductors
- H02K3/18—Windings for salient poles
Definitions
- the present invention relates to a coil and a motor including the coil.
- Patent Document 1 As a method for improving the space factor of the coil, a configuration in which a cast coil using a copper material is arranged in a slot has been proposed (see, for example, Patent Document 1).
- IPM Internal Permanent Magnet
- SPM Surface Permanent Magnet
- the magnetic flux generated by the magnet may interlink with the coil.
- an eddy current is generated in the coil, and an energy loss (hereinafter, this loss is referred to as an eddy current loss) occurs due to this.
- an energy loss hereinafter, this loss is referred to as an eddy current loss
- Patent Document 2 discloses a configuration in which the distance between the coil and the tip surface of the tooth differs between the lagging side and the advancing side in the main rotation direction of the rotor. ing.
- the magnetic flux generated by the magnet or the magnetic flux generated by the coil may interlink with the coil, causing eddy current loss.
- An object of the present invention is to provide a coil capable of reducing eddy current loss caused by a magnet or a coil provided in a rotor, and a motor provided with the coil.
- the coil according to the present invention is a coil mounted on a stator of a motor, and the motor has a stator, an output shaft at the center of the axis, and a plurality of magnets on the outer peripheral side.
- the coil has at least a rotor arranged radially inside the stator, and the coil has a winding portion composed of first to nth (n is an integer of 2 or more) turns wound in a spiral shape. It has at least a first lead portion extending from the first turn and a second lead portion extending from the nth turn, and a part or all of the shapes of the first to nth turns are generated by the magnet or the coil. It differs from other parts in the part where the magnetic flux interlinks with the coil.
- the motor according to the present invention includes at least a rotor having an output shaft at the center of the axis, a plurality of magnets on the outer peripheral side, and a stator provided at a predetermined distance from the rotor on the radial outer side of the rotor.
- the stator has at least an annular yoke, a plurality of teeth connected to the inner circumference of the yoke, and a plurality of coils attached to each of the plurality of teeth, and each of the plurality of coils is a coil. ..
- the eddy current loss generated in the coil can be reduced.
- the decrease in efficiency can be suppressed by reducing the eddy current loss.
- FIG. 1 It is sectional drawing of the motor which concerns on Embodiment 1 of this invention. It is a perspective view of a coil. It is sectional drawing of the main part of a stator. It is sectional drawing of the main part of the stator for comparison. It is sectional drawing of the main part of another stator which concerns on Embodiment 1.
- FIG. It is sectional drawing of the main part of the stator which concerns on modification 1.
- FIG. It is sectional drawing of the main part of another stator which concerns on modification 1.
- FIG. It is sectional drawing of the main part of the stator which concerns on modification 2.
- FIG. It is sectional drawing of the main part of another stator which concerns on modification 2.
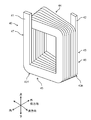
- FIG. 1 is a schematic cross-sectional view of the motor according to the first embodiment of the present invention.
- the radial direction of the motor 1000 is the "diameter direction”
- the outer peripheral direction is the “circumferential direction”
- the axial direction of the output shaft 210 of the motor 1000 (the direction perpendicular to the paper surface in FIG. 1) is the "axis”.
- the axial center side of the motor 1000 may be referred to as a radial inner side
- the outer peripheral side may be referred to as a radial outer side.
- the first lead portion 41 and the second lead portion 42 of the coil 40 which will be described later, are not shown.
- the axis of the motor 1000 coincides with the axis of the output shaft 210.
- FIG. 2 is a perspective view of the coil 40.
- FIG. 3A is a schematic cross-sectional view of a main part of the stator.
- FIG. 3B is a schematic cross-sectional view of a main part of the stator for comparison.
- the motor 1000 has a stator 100 and a rotor 200.
- the motor 1000 has components other than these, such as a motor case and bearings that support the output shaft. However, for convenience of explanation, the illustration and description thereof will be omitted.
- the stator 100 is provided between an annular yoke 20, a plurality of teeth 10 connected to the inner circumference of the yoke 20 and provided at equal intervals along the inner circumference, and teeth 10 adjacent to each other in the circumferential direction. It has a slot 30 and a coil 40 housed in the slot 30.
- the stator 100 is arranged on the outer side of the rotor 200 in the radial direction at regular intervals from the rotor 200.
- the teeth 10 and the yoke 20 are formed by, for example, laminating an electromagnetic steel sheet containing silicon or the like and then punching it.
- the coil 40 is a component in which a conducting wire made of copper or the like is spirally wound.
- the coil 40 is a molded coil formed by molding a conducting wire made of copper or the like having a quadrangular cross section.
- the coil 40 is attached to each of the plurality of teeth 10 with the insulator 50 (see FIG. 3A) interposed therebetween, and is housed in the slot 30.
- an insulating film is formed on the surface of the conducting wire constituting the coil 40. The details of the shape of the coil 40 will be described later.
- the "molded coil" in the present specification does not include a coil in which a conducting wire having a constant width and thickness is simply wound in a spiral shape.
- the forming coil is formed, for example, by preparing a plurality of rectangular plate materials having different lengths, widths or thicknesses, and joining these plate materials by cold pressure welding, welding, or other methods.
- the material of the plate material is a low resistance material such as copper and aluminum.
- the molding coil may be formed by so-called casting in which copper or the like is melted and poured into a mold.
- a forming coil may be formed by bending a plate-shaped conducting wire having a width or a thickness different in the middle at a predetermined position.
- a plate-shaped conductor having a constant width and thickness may be rolled at a predetermined portion, the width or thickness may be changed in the middle, and then spirally wound to form a forming coil.
- the forming coil is formed by adding another process other than winding the conductor, or by a method different from simply winding the conductor.
- the rotor 200 has an output shaft 210, a rotor core 220 having the output shaft 210 as an axis, and a plurality of magnets 230.
- the plurality of magnets 230 are embedded inside the rotor core 220, and the north and south poles are alternately arranged along the outer peripheral direction of the output shaft so as to face the stator 100.
- the material, shape, and material of the magnet 230 can be appropriately changed according to the output of the motor 1000 and the like.
- the rotor core 220 is formed by, for example, punching after laminating an electromagnetic steel sheet containing silicon or the like.
- Coil U1 to U4, V1 to V4, W1 to W4 are connected in series, respectively.
- Three phases of U, V, and W which have a phase difference of 120 ° in electrical angle from each other, are supplied to and excited by the coils U1 to U4, V1 to V4, and W1 to W4, respectively, and a rotating magnetic field is generated in the stator 100.
- An interaction occurs between this rotating magnetic field and the magnetic field generated by the magnet 230 provided in the rotor 200 to generate torque, and the output shaft 210 rotates while being supported by a bearing (not shown).
- the output shaft 210 can rotate in either the clockwise direction or the counterclockwise direction according to the phase difference of the three-phase currents of the U, V, and W phases.
- the rotation direction of the output shaft 210 is determined when viewed from the lower side in the axial direction.
- the coil 40 has a first lead portion 41, a second lead portion 42, and a winding portion 43.
- the conducting wire is spirally wound for a plurality of turns.
- the winding portion 43 has first to nth turns 431 to 43n.
- n is an integer of 2 or more.
- n 7.
- the present invention is not particularly limited to this, and this value can be appropriately changed according to the specifications of the motor 1000 and the like.
- the first to nth turns 431 to 43n are stacked in this order from the center side to the outer peripheral side of the motor 1000, and are housed in the slot 30.
- each of the first to nth turns 431 to 43n is a square ring having four sides when viewed in the radial direction.
- the winding portion 43 has a first side portion 44, a second side portion 45, a third side portion 46, and a fourth side portion 47 corresponding to this shape.
- Each side portion 44 to 47 includes a corresponding side portion of the first to nth turns 431 to 43n.
- the first side portion 44 corresponds to the upper end side portion in the axial direction of the four side portions.
- the second side portion 45 corresponds to the lower end side portion in the axial direction of the four side portions.
- the third side portion 46 corresponds to one end portion in the circumferential direction of the four side portions.
- the fourth side portion 47 corresponds to the other end portion in the circumferential direction of the four side portions.
- the first side portion 44 may be referred to as a first coil end 44
- the second side portion 45 may be referred to as a second coil end 45.
- the first lead portion 41 is continuous with the end portion of the first turn 431 and extends upward from the first coil end 44.
- the second lead portion 42 is continuous with the nth turn 43n and extends upward from the first coil end 44.
- the first lead portion 41 and the second lead portion 42 correspond to wiring portions and connection portions with the bus bar (not shown), and the insulating coating is removed from the respective tips. Further, the first lead portion 41 and the second lead portion 42 may be bent in the middle depending on the wiring, the connection position with the bus bar, and the like.
- the thicknesses of the first to nth turns 431 to 43n included in the third side portion 46 are the thicknesses of the first to nth included in the fourth side portion 47. It is thinner than the respective thicknesses of turns 431 to 43n.
- the insulator 50 is a tubular part with both ends open in the radial direction, and is made of an insulating material. By providing the insulator 50, it is possible to prevent a short circuit between the coil 40 and the teeth 10 and suppress a leakage current from the coil 40 to the teeth 10.
- the shape of the insulator 50 can be appropriately changed according to the shape of the teeth 10 and the yoke 20.
- the radial outer surface of the nth turn 43n abuts or approaches the inner circumference of the yoke 20.
- the coil 40 is arranged.
- the first to nth turns 431 to 43n included in the third side portion 46 are arranged so as to be in contact with adjacent turns in the radial direction. Therefore, the radial inner end face of the third side portion 46 recedes radially outward from the radial inner end face of the fourth side portion 47.
- the thicknesses of the third side portion 46 and the fourth side portion 47 are the same in the first to nth turns 431 to 43n. Therefore, the radial inner end surface of the third side portion 46 and the radial inner end surface of the fourth side portion 47 are located at substantially equidistant positions along the radial direction from the center of the motor 1000.
- the third side portion 46 is located on the lag side (hereinafter, simply referred to as the lag side) in the main rotation direction of the rotor 200.
- the fourth side portion 47 is located on the advancing side (hereinafter, simply referred to as the advancing side) of the rotor 200 in the main rotation direction.
- the direction of the magnetic flux generated by the current flowing through the coil 40 is the magnetic flux generated by the plurality of magnets 230 provided in the rotor 200 (hereinafter, hereinafter, It is simply different from the direction of the magnetic flux generated by the magnet 230). Therefore, on the advancing side, the magnetic flux generated by the magnet 230 and the magnetic flux generated by the coil 40 do not substantially interlink the coil 40.
- the direction of the magnetic flux generated by the current flowing through the coil 40 is the same as the direction of the magnetic flux generated by the magnet 230.
- the magnetic flux generated by the magnet 230 and the coil 40 interlinks the coil 40 on the delay side, and an eddy current loss occurs at this portion.
- the end face on the inner side in the radial direction of the third side portion 46 is retracted outward in the radial direction, the amount of magnetic flux interlinking the coil 40 on the lagging side is reduced. be able to. As a result, the eddy current loss can be reduced as compared with the example shown in FIG. 3B.
- the reach of the magnetic flux generated by the magnet 230 and the magnetic flux generated by the coil 40 is determined by the specifications of the magnet 230 and the shape of the tooth 10, and generally, as shown in FIGS. 3A and 3B, the rotor 200 Interlinks with coil 40 on the side closer to.
- the coil 40 according to the present embodiment is mounted on the stator 100 of the motor 1000.
- the motor 1000 has a stator 100, an output shaft 210 at the center of the shaft, and a plurality of magnets 230 on the outer peripheral side.
- the motor 1000 has at least a rotor 200 arranged radially inside the stator 100.
- the coil 40 includes a winding portion 43 composed of spirally wound first to nth turns 431 to 43n, a first lead portion 41 extending from the first turn 431, and a second lead portion 41 extending from the nth turn 43n. It has at least a lead portion 42 of the above.
- the shapes of the first to nth turns 431 to 43n are different between the lagging side and the advancing side in the main rotation direction of the rotor 200. Specifically, the thicknesses of the first to nth turns 431 to 43n included in the third side portion 46 located on the lagging side are included in the fourth side portion 47 located on the advancing side. It is thinner than the thickness of each of the 1st to nth turns 431 to 43n.
- the coil 40 By configuring the coil 40 in this way, it is possible to reduce the amount of magnetic flux in which the magnetic flux generated by the magnet 230 and the coil 40 interlinks the coil 40 when the motor 1000 rotates in the main rotation direction. This makes it possible to reduce the eddy current loss. Therefore, it is possible to suppress a decrease in the efficiency of the motor 1000.
- the resistance of the coil 40 increases, and the loss due to Joule heat (hereinafter referred to as copper loss) increases. Further, the space factor of the coil 40 in the slot 30 decreases. Due to these factors, there is a concern that the efficiency of the motor 1000 may be reduced.
- the present embodiment by making the shape of the coil 40 as described above, it is possible to suppress an increase in copper loss of the coil 40 and a decrease in the space factor of the coil 40 in the slot 30. This makes it possible to suppress a decrease in the efficiency of the motor 1000.
- the shapes of the coil 40 and the stator 100, particularly the insulator 50, are not limited to the examples shown in FIGS. 2 and 3A, and may have different shapes.
- FIG. 4 is a schematic cross-sectional view of a main part of another stator according to the first embodiment.
- the thickness of each of the first to nth turns 431 to 43n included in the third side portion 46 is the fourth side. It is thinner than the thickness of each of the first to nth turns 431 to 43n included in the portion 47.
- a plurality of groove portions 50a separated from each other in the radial direction are provided on the end face on the lagging side of the insulator 50 shown in FIG.
- Each of the first to nth turns 431 to 43n included in the third side portion 46 is housed in the groove portion 50a.
- the coil 40 and the stator 100 may be configured in this way. Also in this case, as compared with the configuration shown in FIG. 3B, the end face on the inner side in the radial direction of the third side portion 46 is retracted outward in the radial direction, so that the amount of magnetic flux interlinking the coil 40 on the lagging side is reduced. be able to. As a result, the eddy current loss can be reduced and the efficiency of the motor 1000 can be suppressed from being lowered.
- each groove portion 50a accommodates a part of the first to nth turns 431 to 43n. Therefore, as compared with the configuration shown in FIG. 3A, the amount of the radial inner end face of the third side portion 46 retracting radially outward is smaller.
- the first to nth turns 431 to 43n are arranged at intervals from each other on the lagging side, the amount of magnetic flux generated by the magnet 230 and the coil 40 interlinks the coil 40 is shown in FIG. 3A. It does not increase so much compared to the configuration shown in.
- an insulating spacer or an insulating paper is sandwiched between each of the first to nth turns 431 to 43n included in the third side portion 46. You may.
- the motor 1000 includes at least a rotor 200 having an output shaft 210 as an axis, and a stator 100 provided at a predetermined distance from the rotor 200 on the radial outer side of the rotor 200.
- the stator 100 has at least an annular yoke 20, a plurality of teeth 10 connected to the inner circumference of the yoke 20, and a plurality of coils 40 attached to each of the plurality of teeth 10.
- the amount of magnetic flux interlinking the coil 40 on the lagging side is reduced. Therefore, the eddy current loss can be reduced and the efficiency of the motor 1000 can be suppressed from being lowered.
- the motor 1000 rotates mainly in only one direction or in both the clockwise and counterclockwise directions depends on the specifications of the motor 1000. However, as typified by the main motor of an electric vehicle, there are many cases where the motor is mainly used by rotating in only one direction. By applying the motor 1000 as such a motor, the degree of reduction of the eddy current loss is increased, and the decrease in the efficiency of the motor 1000 can be suppressed more reliably.
- the coil 40 is mounted on the teeth 10 in a state of being wound in a single layer. By doing so, the structure of the coil 40 can be simplified, and an increase in the manufacturing cost of the coil 40 can be suppressed. Further, it becomes easy to design the total number of turns of the coil 40 wound around the teeth 10. However, the coil 40 may be mounted on the teeth 10 in a state of being wound in multiple layers.
- the shapes of the first to nth turns 431 to 43n of the coil 40 may be different between the lagging side and the leading side.
- the volume of the first to nth turns 431 to 43n located on the lagging side may be smaller than the volume of the first to nth turns 431 to 43n located on the advancing side.
- this relationship may be established on the side closer to the rotor 200.
- the coil 40 of the present embodiment is the coil 40 mounted on the stator of the motor 1000, and the motor 1000 has the stator 100, the output shaft 210 at the axis, and a plurality of magnets 230 on the outer peripheral side.
- the coil 40 has first to nth (n is an integer of 2 or more) turns 431 wound in a spiral shape, and has at least a rotor 200 arranged inside the stator 100 in the radial direction. It has at least a winding portion 43 composed of ⁇ 43n, a first lead portion 41 extending from the first turn 431, and a second lead portion 42 extending from the nth turn 43n, and has at least the first to nth turns 431.
- the shape of a part or all of ⁇ 43n is different from the other parts in the portion where the magnetic flux generated by the magnet 230 or the coil 40 is interlinked with the coil 40.
- the shape of a part or all of the first to nth turns 431 to 43n may be different between the lagging side and the advancing side in the main rotation direction of the rotor 200.
- the thickness of each of some or all turns is the advancing side in the main rotation direction of the rotor 200. It may be thinner than the respective thicknesses of the first to nth turns 431 to 43n located in.
- the motor 1000 of the present embodiment is provided with a rotor 200 having an output shaft 210 at the axis and a plurality of magnets 230 on the outer peripheral side, respectively, and a rotor 200 on the radial outer side of the rotor 200 at a predetermined distance.
- the stator 100 includes at least an annular yoke 20, a plurality of teeth 10 connected to the inner circumference of the yoke 20, and a plurality of coils 40 mounted on each of the plurality of teeth 10.
- Each of the plurality of coils 40 is the coil 40 according to any one of the first and second embodiments and the first to sixth modifications.
- the coil 40 may be mounted on the teeth 10 in a state of being wound in a single layer.
- the shape of the coil 40 is not limited to the shape shown in the present embodiment, and various shapes can be taken. Hereinafter, variations in the shape of the coil 40 will be described with reference to modifications.
- FIG. 5 is a schematic cross-sectional view of a main part of the stator according to the first modification.
- FIG. 6 is a schematic cross-sectional view of a main part of another stator according to the first modification.
- FIGS. 5, 6 and the drawings shown thereafter the same parts as those in the first embodiment are designated by the same reference numerals, and detailed description thereof will be omitted.
- the thickness of the turn on the side closer to the rotor 200 is the thickness. It differs from the configuration shown in the first embodiment in that it is thinner than the other turns. In this modification, on the lagging side, the thickness of only two turns including the nth turn 43n is thinner than that of the other turns. However, it is not particularly limited to this. It can be appropriately changed according to the specifications of the motor 1000 and the request for the degree of decrease in the amount of interlinkage magnetic flux.
- the amount of magnetic flux generated by the magnet 230 and the coil 40 reduces the amount of magnetic flux interlinking the coil 40. Can be done. As a result, the eddy current loss can be reduced and the efficiency of the motor 1000 can be suppressed from being lowered.
- the number of turns for reducing the thickness can be reduced in the third side portion 46. As a result, it is possible to further suppress an increase in copper loss of the coil 40. Further, it is possible to suppress a decrease in the space factor of the coil 40 in the slot 30. As a result, the decrease in efficiency of the motor 1000 can be further suppressed.
- the groove portion 50a may be arranged according to the position and number of turns whose thickness has been reduced. By doing so, it is possible to obtain the same effect as that of the configuration shown in FIG.
- the thickness is reduced. Insulating spacers or insulating paper may be sandwiched.
- the coil 40 of the present modification has a thickness of one or a plurality of turns close to the rotor 200 among the first to nth turns 431 to 43n located on the lagging side in the main rotation direction of the rotor 200. , Thinner than the thickness of other turns.
- FIG. 7 is a schematic cross-sectional view of a main part of the stator according to the second modification.
- FIG. 8 is a schematic cross-sectional view of a main part of another stator according to the second modification.
- the configuration of the present modification shown in FIG. 7 is the width of the k-th turn (k is an integer, 1 ⁇ k ⁇ n) included in the third side portion 46 located on the lagging side, in this case, the width in the circumferential direction. However, it is different from the configuration shown in the first embodiment in that it is narrower than the width of the k-th turn included in the fourth side portion 47 located on the advancing side.
- the thickness of the insulator 51 is different from that of the insulator 50 shown in the first embodiment in that the thickness of the insulator 51 is thicker on the lagging side than on the advancing side.
- the shape of the coil 40 may be defined as shown in this modification. Also in this case, since the volume of the first to nth turns 431 to 43n located on the lagging side is smaller than the volume of the first to nth turns 431 to 43n located on the advancing side, the configuration shown in the first embodiment is shown. Can produce the same effect as.
- the gap in the slot 30 can be filled and the stator 100 can be stabilized.
- the kth turn having a narrow width may be arranged only on the side of the first to nth turns 431 to 43n that is closer to the rotor 200. Good.
- the nth turn 43n and the (n-1) turn correspond to the kth turn.
- it is not particularly limited to this. It can be appropriately changed according to the specifications of the motor 1000, the request for the degree of decrease in the amount of interlinkage magnetic flux, and the like.
- the amount of magnetic flux generated by the magnet 230 and the coil 40 can reduce the amount of magnetic flux interlinking the coil 40.
- the eddy current loss can be reduced and the efficiency of the motor 1000 can be suppressed from being lowered.
- the number of turns in which the width is narrowed from the predetermined value can be reduced in the third side portion 46.
- the thickness of the insulator 51 may be changed along the radial direction according to the position and number of turns whose width is narrowed from a predetermined value.
- the width of the kth turn (k is an integer and 1 ⁇ k ⁇ n) located on the lagging side of the main rotation direction of the rotor 200 is the main rotation direction of the rotor 200. It is narrower than the width of the turn corresponding to the kth turn located on the advancing side of.
- the kth turn may be located on the side closer to the rotor 200 in the first to nth turns 431 to 43n.
- FIG. 9 is a side view of the coil according to the modified example 3.
- FIG. 10 is a partial schematic view of the third side portion and the fourth side portion. Note that FIG. 9 is a side view of the coil 40 as viewed from the inside in the radial direction.
- the configuration of the present modification shown in FIGS. 9 and 10 is an embodiment in which a first concave portion 46a showing a concave shape when the coil 40 is viewed in the radial direction is formed on the third side portion 46. It is different from the configuration shown in 1.
- the coil 40 of this modified example shown in FIGS. 9 and 10 has the third side portion 46 and the fourth side portion 47, and the first to nth turns 431, similarly to the coil 40 shown in FIG. 3B.
- the thickness of each of ⁇ 43n is equal.
- the widths of the first to nth turns 431 to 43n included in the third side portion 46 are equal to the widths of the first to nth turns 431 to 43n included in the fourth side portion 47.
- the third side portion 46 a portion where the magnetic flux generated by the magnet 230 and the coil 40 intersect is simulated in advance, and the first recess 46a is formed in that portion. it can.
- the volume of the coil 40 can be increased as compared with the configurations shown in the first embodiment and the first and second modifications. That is, since the copper loss is further reduced, the efficiency of the motor 1000 can be maintained high.
- a second recess 47a may be formed on the fourth side portion 47. However, it is necessary to establish any of the following relationships between the first recess 46a and the second recess 47a.
- the size of the first recess 46a is larger than the size of the second recess 47a.
- the axial width A1 of the first recess 46a is wider than the axial width A2 of the second recess 47a (A1> A2).
- the circumferential depth B1 of the first recess 46a is deeper than the circumferential depth B2 of the second recess 47a (B1> B2).
- the total volume of the first recess 46a formed in the third side portion 46 may be larger than the total volume of the second recess 47a formed in the fourth side portion 47.
- the magnetic flux generated by the magnet 230 and the coil 40 may be interlinked with the fourth side portion 47.
- the coil of the portion where the magnetic flux generated by the magnet 230 and the coil 40 is interlinked even on the advancing side.
- the volume of 40 can be reduced to reduce the eddy current loss.
- the copper loss is increased while reducing the eddy current loss on the lagging side where the amount of interlinkage magnetic flux is large. Can be suppressed. As a result, the efficiency of the motor 1000 can be maintained high.
- the first recess 46a does not have to be formed on the entire first to nth turns 431 to 43n of the third side portion 46. For example, it may be provided in the first to kth turns on the side closer to the rotor 200. The same applies to the second recess 47a.
- FIG. 9 shows an example in which the second recess 47a is formed on the fourth side portion 47, but if the amount of interlinkage magnetic flux on the fourth side portion 47 is small, the formation of the second recess 47a is omitted. You may.
- the positions, numbers, and sizes of the first recess 46a and the second recess 47a can be appropriately changed according to the region where the magnetic flux generated by the magnet 230 and the coil 40 interlinks with the coil 40.
- the coil 40 of the present modification has at least one or more first recesses 46a in a part or all of the first to nth turns 431 to 43n located on the lagging side in the main rotation direction of the rotor 200. Is formed.
- At least one or more second recesses 47a are formed in a part or all of the first to nth turns 431 to 43n located on the advancing side in the main rotation direction of the rotor, and the entire first recesses 46a are formed. Is preferably larger than the total volume of the second recess 47a.
- FIG. 11 is a side view of the coil according to the modified example 4.
- FIG. 12 is a partial schematic view of the third side portion and the fourth side portion. Note that FIG. 11 is a side view of the coil 40 as viewed from the inside in the radial direction.
- the configuration of the present modification shown in FIGS. 11 and 12 is different from the configuration shown in the modification 3 in that the first slit 46b penetrating the coil 40 is formed on the third side portion 46.
- the same effect as that of the configuration shown in the modified example 3 can be obtained. That is, on the delay side, the volume of the coil 40 at the portion where the magnetic fluxes generated by the magnet 230 and the coil 40 intersect can be reduced to reduce the eddy current loss. As a result, it is possible to suppress a decrease in the efficiency of the motor 1000. Moreover, the volume reduction of the coil 40 can be suppressed. Therefore, the copper loss is further reduced, and the efficiency of the motor 1000 can be maintained high.
- the second slit 47b may be formed on the fourth side portion 47. However, it is necessary to establish any of the following relationships between the first slit 46b and the second slit 47b.
- the size of the first slit 46b is larger than the size of the second slit 47b.
- the axial width A3 of the first slit 46b is wider than the axial width A4 of the second slit 47b (A3> A4).
- the circumferential width B3 of the first slit 46b is wider than the circumferential width B4 of the second slit 47b (B3> B4).
- the total volume of the first slit 46b formed on the third side portion 46 may be larger than the total volume of the second slit 47b formed on the fourth side portion 47.
- the first slit 46b does not have to be formed on the entire first to nth turns 431 to 43n of the third side portion 46. For example, it may be provided in the first to kth turns on the side closer to the rotor 200. The same applies to the second slit 47b.
- FIG. 12 an example in which the second slit 47b is formed on the fourth side portion 47 is shown, but if the amount of interlinkage magnetic flux on the fourth side portion 47 is small, as shown in FIG. The formation of the second slit 47b may be omitted.
- the positions, numbers, and sizes of the first slit 46b and the second slit 47b can be appropriately changed according to the region where the magnetic flux generated by the magnet 230 and the coil 40 interlinks with the coil 40.
- the coil 40 of the present modification has at least one or more first slits 46b in a part or all of the first to nth turns 431 to 43n located on the lagging side in the main rotation direction of the rotor 200. Is formed.
- At least one or more second slits 47b are formed in a part or all of the first to nth turns 431 to 43n located on the advancing side in the main rotation direction of the rotor 200, and the first slit 46b It is preferable that the total volume is larger than the total volume of the second slit 47b.
- FIG. 13 is a schematic view of a main part of the motor according to the second embodiment of the present invention as viewed from the radial direction.
- FIG. 14 is a perspective view of the coil.
- the upper surface of the rotor core 220 and the upper surfaces of the teeth 10 and the yoke 20 are at substantially the same height in the axial direction.
- the lower surface of the rotor core 220 and the lower surfaces of the teeth 10 and the yoke 20 are at substantially the same height.
- the rotor core 220 may be designed to be higher than the stator 100 in the axial direction. By doing so, a larger amount of magnetic flux generated by the magnet 230 can be passed through the teeth 10 and the yoke 20, and the rotational torque of the output shaft 210 can be increased. Further, in such a structure, the magnetic flux generated by the magnet 230 also flows to the outside of the stator 100. Therefore, by arranging a magnetic sensor (not shown) in the vicinity of the rotor 200, the magnetic field inside the motor 1000 can be easily detected. can do.
- the magnetic flux generated by the magnet 230 invades from the upper side in the axial direction and interlinks with the first coil end 44. Therefore, the eddy current loss in this portion increases, and the efficiency of the motor 1000 may decrease.
- the configurations shown in the first embodiment and the modified examples 1 to 4 are modified and applied. As a result, it is possible to reduce the eddy current loss generated at the first coil end 44 and suppress the decrease in efficiency of the motor 1000.
- the thicknesses of the first to nth turns 431 to 43n included in the first coil end 44 are the thicknesses of the first to nth turns 431 included in the second coil end 45. It is thinner than each thickness of ⁇ 43n.
- the volume of the first coil end 44 can be reduced, the eddy current loss can be reduced, and the efficiency decrease of the motor 1000 can be suppressed.
- the coil 40 disclosed in the present specification has the following configurations.
- the coil 40 is mounted on the stator 100 of the motor 1000.
- the motor 1000 has at least a stator 100, an output shaft 210 at the center of the shaft, a plurality of magnets 230 on the outer peripheral side, and a rotor 200 arranged radially inside the stator 100.
- the coil 40 includes a winding portion 43 composed of spirally wound first to nth turns 431 to 43n, a first lead portion 41 extending from the first turn 431, and a second lead portion 41 extending from the nth turn 43n. It has at least a lead portion 42 of the above.
- the shape of a part or all of the first to nth turns 431 to 43n is different from the other parts in the portion where the magnetic flux generated by the magnet 230 interlinks with the coil 40.
- the volume of the first to nth turns 431 to 43n is smaller than the volume of the other portion.
- the winding portion 43 has a first coil end 44 located on one side of the axial direction of the motor 1000 and a second coil end 44 located on the other side of the axial direction. It has two coil ends 45, and includes first to nth turns 431 to 43n included in the first coil end 44 and first to nth turns 431 to 43n included in the second coil end 45. And, some or all of the shapes are different.
- the thickness of each of a part of the turns or all the turns is included in the second coil end 45 from the first to the first to 43n. It is preferably thinner than the respective thicknesses of the nth turns 431 to 43n.
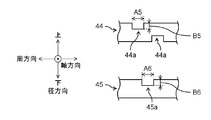
- FIG. 15 is a side view of the coil according to the modified example 5.
- FIG. 16 is a partial schematic view of the first coil end and the second coil end. Note that FIG. 15 is a side view of the coil 40 as viewed from the inside in the radial direction.
- the configuration of the present modification shown in FIGS. 15 and 16 is the embodiment in that the first coil end 44 is formed with a third concave portion 44a showing a concave shape when the coil 40 is viewed in the radial direction. It is different from the configurations shown in 1 and 2 and the modified example 3.
- the thickness of each of the first coil end 44 and the second coil end 45 is the same for the first to nth turns 431 to 43n.
- the volume of the portion where the magnetic flux generated by the magnet 230 intersects can be reduced, and the eddy current loss can be reduced. As a result, it is possible to suppress a decrease in the efficiency of the motor 1000.
- a portion where the magnetic flux generated by the magnet 230 intersects can be simulated in advance, and a third recess 44a can be formed in that portion.
- the volume of the coil 40 can be increased as compared with the configuration shown in the second embodiment. That is, the copper loss is further reduced. Therefore, the efficiency of the motor 1000 can be maintained high.
- a fourth recess 45a may be formed at the second coil end 45. However, it is necessary to establish any of the following relationships between the third recess 44a and the fourth recess 45a.
- the size of the third recess 44a is larger than the size of the fourth recess 45a.
- the circumferential width A5 of the third recess 44a is wider than the circumferential width A6 of the fourth recess 45a (A5> A6).
- the axial depth B5 of the third recess 44a is deeper than the axial depth B6 of the fourth recess 45a (B5> B6).
- the total volume of the third recess 44a formed in the first coil end 44 may be larger than the total volume of the fourth recess 45a formed in the second coil end 45.
- the magnetic flux generated by the magnet 230 may interlink with the second coil end 45.
- the second coil end 45 may be provided with the fourth recess 45a.
- the third recess 44a does not have to be formed in the entire first to nth turns 431 to 43n of the first coil end 44.
- it may be provided in the first to kth (k is a natural number smaller than n) turns on the side closer to the rotor 200.
- FIG. 15 shows an example in which a fourth recess 45a is formed in the second coil end 45.
- the formation of the fourth recess 45a may be omitted.
- the positions, numbers, and sizes of the third recess 44a and the fourth recess 45a can be appropriately changed according to the region where the magnetic flux generated by the magnet 230 interlinks with the coil 40.
- At least one or more third recesses 44a are formed in a part or all of the first to nth turns 431 to 43n included in the first coil end 44. ing.
- At least one or more fourth recesses 45a are formed in a part or all of the first to nth turns 431 to 43n included in the second coil end 45, and the total volume of the third recess 44a is formed. However, it is preferable that the volume is larger than the total volume of the fourth recess 45a.
- FIG. 17 is a side view of the coil according to the modified example 6.
- FIG. 18 is a partial schematic view of the first coil end and the second coil end.
- FIG. 11 is a side view of the coil 40 as viewed from the inside in the radial direction.
- the configuration of the present modification shown in FIGS. 17 and 18 is different from the configuration shown in the modification 5 in that the third slit 44b is formed in the first coil end 44.
- the same effect as that of the configuration shown in the modified example 4 can be obtained.
- the volume of the portion where the magnetic flux generated by the magnet 230 intersects can be reduced to reduce the eddy current loss.
- copper loss can be reduced. As a result, it is possible to suppress a decrease in the efficiency of the motor 1000.
- a fourth slit 45b may be formed at the second coil end 45. However, it is necessary to establish any of the following relationships between the third slit 44b and the fourth slit 45b.
- the size of the third slit 44b is larger than the size of the fourth slit 45b.
- the axial width A7 of the third slit 44b is wider than the axial width A8 of the fourth slit 45b (A7> A8).
- the circumferential width B7 of the third slit 44b is wider than the circumferential width B8 of the fourth slit 45b (B7> B8).
- the total volume of the third slit 44b formed in the first coil end 44 may be larger than the total volume of the fourth slit 45b formed in the second coil end 45.
- the volume of the portion where the magnetic flux generated by the magnet 230 intersects can be reduced, and the eddy current loss can be reduced.
- the increase in copper loss can be suppressed.
- the efficiency of the motor 1000 can be maintained high.
- the third slit 44b does not have to be formed on the entire first to nth turns 431 to 43n of the first coil end 44. For example, it may be provided in the first to kth turns on the side closer to the rotor 200. The same applies to the fourth slit 45b.
- FIG. 18 shows an example in which the fourth slit 45b is formed in the second coil end 45, but if the amount of interlinkage magnetic flux at the second coil end 45 is small, as shown in FIG. The formation of the fourth slit 45b may be omitted.
- the positions, numbers, and sizes of the third slit 44b and the fourth slit 45b can be appropriately changed according to the region where the magnetic flux generated by the magnet 230 interlinks with the coil 40.
- At least one or more third slits 44b are formed in a part or all of the first to nth turns 431 to 43n included in the first coil end 44. ing.
- At least one or more fourth slits 45b are formed in a part or all of the first to nth turns 431 to 43n included in the second coil end 45, and the total volume of the third slit 44b is formed. However, it is preferable that the volume is larger than the total volume of the fourth slit 45b.
- the third recess 44a may be provided in the first coil end 44.
- a fourth recess 45a may be provided in the second coil end 45.
- the example in which the magnetic flux generated by the magnet 230 interlinks with the first coil end 44 is shown, but depending on the structure of the motor 1000, the magnetic flux generated by the magnet 230 is the second. It may be interlinked with the coil end 45 of. In such a case, it is advisable to apply the deformation applied to the first coil end 44 to the second coil end 45. For example, make the thickness of each of the first to nth turns 43n included in the second coil end 45 thinner than the thickness of each of the first to nth turns 43n included in the first coil end 44. To.
- the total volume of the fourth recess 45a formed in the second coil end 45 is made larger than the total volume of the third recess 44a formed in the first coil end 44.
- the total volume of the fourth slit 45b formed in the second coil end 45 is made larger than the total volume of the third slit 44b formed in the first coil end 44.
- the eddy current loss at the portion where the magnetic flux generated by the magnet 230 is linked to the coil 40 can be reliably reduced.
- the cross-sectional shape of the conducting wire constituting the coil 40 is not particularly limited to a quadrangle, and may be another shape. For example, it may be an m-square (m is an integer of 3 or more). It may also be oval.
- the coil of the present invention can reduce eddy current loss caused by magnets and coils provided in the rotor. Therefore, it is useful for applying to a motor that requires high efficiency.
- Teeth 20 Yoke 30 Slot 40 Coil 41 First lead portion 42 Second lead portion 43 Winding portions 431 to 43n First to n turns 44 First coil end (first side portion) 44a Third recess 44b Third slit 45 Second coil end (second side) 45a 4th recess 45b 4th slit 46 3rd side (delayed side) 46a 1st recess 46b 1st slit 47 4th side (advancing side) 47a Second recess 47b Second slit 50, 51 Insulator 50a Groove 100 Stator 200 Rotor 210 Output shaft 220 Rotor core 230 Magnet 1000 Motor
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Windings For Motors And Generators (AREA)
- Iron Core Of Rotating Electric Machines (AREA)
Abstract
コイルは、モータのステータに装着される。コイルは、螺旋状に巻回された第1~第nターンからなる巻線部と、第1ターンから延びる第1のリード部と、第nターンから延びる第2のリード部と、を少なくとも有している。第1~第nターンの一部または全部の形状が、ロータに設けられた磁石及びコイルで発生した磁束がコイルに鎖交する部分において、他の部分と異なる。
Description
本発明は、コイル及びそれを備えたモータに関する。
近年、産業、車載用途でモータの需要は高まっている。その中で、モータの効率向上、低コスト化が要望されている。
モータの効率向上手法の一つとして、ステータのスロット内に配置されるコイルの占積率を向上させることが知られている。コイルの占積率を向上させることで、モータの駆動時に、コイルに流れる電流に起因する損失を抑制できる。
コイルの占積率を向上させる手法として、銅材を用いた鋳造コイルをスロット内に配置する構成が提案されている(例えば特許文献1を参照)。
ところで、高効率、低コストのモータとして、IPM(Internal Permanent Magnet)モータ及びSPM(Surface Permanent Magnet)モータが広く使用されている。これらのモータでは、中心に出力軸を有するロータが配置され、その外側に、コイルがそれぞれ装着された複数のティースを有するステータが配置される。コイルに電流が流れると磁界が発生し、この磁界と磁石で発生する磁束との間で相互作用を生じさせることで、モータが回転する。
しかし、ロータとティースとの配置関係によっては、磁石で発生した磁束がコイルに鎖交することがある。この場合、コイルに渦電流を生じ、これに起因してエネルギー損失(以下、この損失を渦電流損という)が発生する。このように渦電流損が発生するとモータの効率が低下してしまう。
このような渦電流損を抑制するために、例えば、特許文献2には、ロータの主回転方向の遅れ側と進み側とで、コイルとティースの先端面との距離を異ならせる構成が開示されている。
しかし、特許文献2に開示された従来の構成では、ロータの主回転方向の遅れ側と進み側でコイルが同じ形状となっており、遅れ側での渦電流損を効果的に抑制できなかった。
これ以外にも、モータの構造によっては、磁石で発生した磁束またはコイルにより発生した磁束がコイルに鎖交し、渦電流損が発生することがある。
本発明はかかる点に鑑みてなされたものである。本発明の目的は、ロータに設けられた磁石またはコイルに起因した渦電流損を低減可能なコイル及びそれを備えたモータを提供することにある。
上記の目的を達成するために、本発明に係るコイルは、モータのステータに装着されるコイルであって、モータは、ステータと、軸心に出力軸を、外周側に複数の磁石をそれぞれ有するとともに、ステータの径方向内側に配置されたロータと、を少なくとも有し、コイルは、螺旋状に巻回された第1~第n(nは2以上の整数)ターンからなる巻線部と、第1ターンから延びる第1のリード部と、第nターンから延びる第2のリード部と、を少なくとも有し、第1~第nターンの一部または全部の形状が、磁石またはコイルで発生した磁束がコイルに鎖交する部分において、他の部分と異なる。
本発明に係るモータは、軸心に出力軸を、外周側に複数の磁石をそれぞれ有するロータと、ロータの径方向外側にロータと所定の間隔をあけて設けられたステータと、を少なくとも備え、ステータは、環状のヨークと、ヨークの内周に接続された複数のティースと、複数のティースのそれぞれに装着された複数のコイルと、を少なくとも有し、複数のコイルのそれぞれは、コイルである。
本発明のコイルによれば、コイルで発生する渦電流損を低減することができる。本発明のモータによれば、渦電流損が低減されることにより、効率の低下を抑制できる。
以下、本発明の実施形態を図面に基づいて詳細に説明する。以下の好ましい実施形態の説明は、本質的に例示に過ぎず、本発明、その適用物或いはその用途を制限することを意図するものでは全くない。
(実施形態1)
[モータの構成]
図1は、本発明の実施形態1に係るモータの断面模式図である。なお、以降の説明において、モータ1000の半径方向を「径方向」と、外周方向を「周方向」と、モータ1000の出力軸210の軸線方向(図1における紙面と垂直な方向)を「軸方向」とそれぞれ呼ぶことがある。また、径方向において、モータ1000の軸心側を径方向内側と、外周側を径方向外側と呼ぶことがある。図1において、後で述べるコイル40の第1のリード部41と、第2のリード部42については、図示を省略している。なお、軸方向で見て、モータ1000の軸心は、出力軸210の軸線に一致する。
[モータの構成]
図1は、本発明の実施形態1に係るモータの断面模式図である。なお、以降の説明において、モータ1000の半径方向を「径方向」と、外周方向を「周方向」と、モータ1000の出力軸210の軸線方向(図1における紙面と垂直な方向)を「軸方向」とそれぞれ呼ぶことがある。また、径方向において、モータ1000の軸心側を径方向内側と、外周側を径方向外側と呼ぶことがある。図1において、後で述べるコイル40の第1のリード部41と、第2のリード部42については、図示を省略している。なお、軸方向で見て、モータ1000の軸心は、出力軸210の軸線に一致する。
図2は、コイル40の斜視図である。図3Aは、ステータの要部の断面模式図である。図3Bは、比較のためのステータの要部の断面模式図である。モータ1000は、ステータ100とロータ200とを有している。なお、モータ1000は、これら以外の構成部品、例えば、モータケース及び出力軸を軸支する軸受等の部品を有している。しかし、説明の便宜上、その図示及び説明を省略する。
ステータ100は、円環状のヨーク20と、ヨーク20の内周に接続され、当該内周に沿って等間隔に設けられた複数のティース10と、周方向に隣り合うティース10の間にそれぞれ設けられたスロット30と、スロット30内に収容されたコイル40とを有している。ステータ100は、ロータ200の径方向外側に、ロータ200と一定の間隔をあけて配置されている。
ティース10とヨーク20は、それぞれ、例えば、ケイ素等を含有した電磁鋼板を積層後に打ち抜き加工して形成される。コイル40は、銅等からなる導線が螺旋状に巻回されてなる部品である。コイル40は、断面が四角形の銅等からなる導線が成形されてなる成形コイルである。コイル40は、インシュレータ50(図3Aを参照)を挟んで複数のティース10のそれぞれに装着されて、スロット30内に収容されている。なお、図示しないが、コイル40を構成する導線の表面には絶縁被膜が形成されている。また、コイル40の形状の詳細については、後で述べる。
なお、本願明細書における「成形コイル」は、幅及び厚さが一定の導線が螺旋状に巻回されただけのコイルを含まない。
成形コイルは、例えば、長さ、幅あるいは厚みが異なる複数の長方形の板材を準備し、これらの板材を冷間圧接、溶接、またはそのほかの方法で接合することで形成される。板材の材質は、銅及びアルミ等の低抵抗材料である。
あるいは、成形コイルは、銅等を溶融して鋳型に流し込む、いわゆる鋳造により形成されてもよい。幅または厚さを予め途中で異なるように形成した板状の導線を所定の位置で曲げ加工することで、成形コイルが形成されてもよい。あるいは、幅及び厚さが一定の板状の導線を所定の部位で圧延加工して、途中で幅または厚さを変更した後に螺旋状に巻回して、成形コイルが形成されてもよい。要するに、導線を巻回する以外にさらに別の加工を加えるか、あるいは、単に巻き回すのとは異なる工法で成形コイルは形成される。
また、コイル40に流れる電流の位相に応じて、コイルをコイルU1~U4,V1~V4,W1~W4とそれぞれ呼ぶことがある。
ロータ200は、出力軸210と、出力軸210を軸心に有するロータコア220と、複数の磁石230とを有している。複数の磁石230は、ロータコア220の内部に埋設され、ステータ100に対向してN極、S極が出力軸の外周方向に沿って交互に配置されている。なお、磁石230の材料、形状、及び材質については、モータ1000の出力等に応じて適宜変更しうる。また、ロータコア220は、例えば、ケイ素等を含有した電磁鋼板を積層後に打ち抜き加工して形成される。
コイルU1~U4,V1~V4,W1~W4はそれぞれ直列に接続されている。互いに電気角で120°の位相差を有するU,V,W相の3相の電流がそれぞれコイルU1~U4,V1~V4,W1~W4に供給されて励磁され、ステータ100に回転磁界が発生する。この回転磁界と、ロータ200に設けられた磁石230が発生する磁界との間で相互作用を生じてトルクが発生し、出力軸210が図示しない軸受に支持されて回転する。U,V,W相の3相の電流の位相差に応じて、出力軸210は、時計回り方向と反時計回り方向のいずれにも回転可能である。なお、本願明細書において、出力軸210の回転方向は、軸方向下側から見て決定される。
[コイル及びステータの要部の構成]
図2に示すように、コイル40は、第1のリード部41と第2のリード部42と巻線部43とを有している。
図2に示すように、コイル40は、第1のリード部41と第2のリード部42と巻線部43とを有している。
巻線部43は、導線が螺旋状に複数ターン巻回されている。巻線部43は、第1~第nターン431~43nを有している。ここで、nは2以上の整数である。本実施形態では、n=7としている。しかし、特にこれに限定されず、モータ1000の仕様等に応じて、この値は適宜変更されうる。
第1~第nターン431~43nは、モータ1000の中心側から外周側に向けてこの順で積層されて、スロット30内に収容される。
第1~第nターン431~43nのそれぞれの外形は、径方向で見て4つの辺部を有する四角環状である。巻線部43は、この形状に対応して、第1の辺部44と第2の辺部45と第3の辺部46と第4の辺部47とを有している。それぞれの辺部44~47に第1~第nターン431~43nの対応する辺部が含まれている。
第1の辺部44は、4つの辺部のうちの軸方向の上端辺部に相当する。第2の辺部45は、4つの辺部のうちの軸方向の下端辺部に相当する。第3の辺部46は、4つの辺部のうちの周方向の一方の端辺部に相当する。第4の辺部47は、4つの辺部のうちの周方向の他方の端辺部に相当する。以降の説明において、第1の辺部44を第1のコイルエンド44と、第2の辺部45を第2のコイルエンド45と、それぞれ呼ぶことがある。
第1のリード部41は、第1ターン431の端部に連続しており、第1のコイルエンド44からその上方に延びている。第2のリード部42は、第nターン43nに連続しており、第1のコイルエンド44からその上方に延びている。第1のリード部41と第2のリード部42とは、図示しない配線やバスバーとの結線部にあたり、それぞれの先端では絶縁被膜が除去されている。また、配線やバスバーとの接続位置等に応じて、第1のリード部41と第2のリード部42とは、それぞれ途中で折り曲げられることがある。
図2に示すように、コイル40において、第3の辺部46に含まれる第1~第nターン431~43nのそれぞれの厚さが、第4の辺部47に含まれる第1~第nターン431~43nのそれぞれの厚さよりも薄くなっている。
インシュレータ50は、径方向の両端が開口した筒状の部品であり、絶縁材料からなる。インシュレータ50を設けることにより、コイル40とティース10との短絡を防止し、コイル40からティース10への漏れ電流を抑制できる。なお、インシュレータ50の形状は、ティース10やヨーク20の形状に応じて適宜変更されうる。
インシュレータ50とコイル40とが装着されたティース10をヨーク20に接続した場合、図3Aに示すように、第nターン43nの径方向外側の表面が、ヨーク20の内周に当接または近接するように、コイル40が配置される。第3の辺部46に含まれる第1~第nターン431~43nは、それぞれ隣り合うターンと径方向で接するように配置される。このため、第3の辺部46の径方向内側の端面は、第4の辺部47の径方向内側の端面よりも径方向外側に後退している。
一方、図3Bに示すコイル40は、第3の辺部46と第4の辺部47とで、第1~第nターン431~43nのそれぞれの厚さが等しい。このため、第3の辺部46の径方向内側の端面と第4の辺部47の径方向内側の端面とは、モータ1000の中心から径方向に沿ってほぼ等距離の位置にある。
図3A,図3Bに示すように、第3の辺部46は、ロータ200の主回転方向の遅れ側(以下、単に遅れ側という)に位置している。第4の辺部47は、ロータ200の主回転方向の進み側(以下、単に進み側という)に位置している。特許文献2でも示されているように、ティース10の進み側では、コイル40に電流が流れることにより発生する磁束の向きは、ロータ200に設けられた複数の磁石230で発生した磁束(以下、単に、磁石230で発生した磁束という)の向きと異なる。このため、進み側では、磁石230で発生した磁束やコイル40で発生した磁束は、コイル40をほぼ鎖交しない。
一方、遅れ側では、コイル40に電流が流れることにより発生する磁束の向きが、磁石230で発生した磁束の向きと同じになる。
このため、図3Bに示す例では、遅れ側で、磁石230及びコイル40で発生した磁束がコイル40を鎖交し、この部分で渦電流損が発生する。一方、図3Aに示す例では、前述した通り、第3の辺部46の径方向内側の端面が、径方向外側に後退しているため、遅れ側でコイル40を鎖交する磁束量を減らすことができる。その結果、渦電流損を図3Bに示す例に比べて低減させることができる。
なお、磁石230の仕様やティース10の形状によって、磁石230で発生した磁束と、コイル40で発生する磁束は、その到達距離が定まっており、一般に、図3A,3Bに示した通り、ロータ200に近い側でコイル40に鎖交する。
[効果等]
以上説明したように、本実施形態に係るコイル40は、モータ1000のステータ100に装着される。モータ1000は、ステータ100と、軸心に出力軸210と、外周側に複数の磁石230を有する。モータ1000は、ステータ100の径方向内側に配置されたロータ200と、を少なくとも有している。
以上説明したように、本実施形態に係るコイル40は、モータ1000のステータ100に装着される。モータ1000は、ステータ100と、軸心に出力軸210と、外周側に複数の磁石230を有する。モータ1000は、ステータ100の径方向内側に配置されたロータ200と、を少なくとも有している。
コイル40は、螺旋状に巻回された第1~第nターン431~43nからなる巻線部43と、第1ターン431から延びる第1のリード部41と、第nターン43nから延びる第2のリード部42と、を少なくとも有している。
ロータ200の主回転方向の遅れ側と進み側とで、第1~第nターン431~43nの形状が異なる。具体的には、遅れ側に位置する第3の辺部46に含まれる第1~第nターン431~43nのそれぞれの厚さが、進み側に位置する第4の辺部47に含まれる第1~第nターン431~43nのそれぞれの厚さよりも薄くなっている。
コイル40をこのように構成することで、モータ1000が主回転方向に回転するときに、磁石230及びコイル40で発生した磁束がコイル40を鎖交する磁束量を減らすことができる。このことにより、渦電流損を低減することができる。したがって、モータ1000の効率が低下するのを抑制できる。
また、各ターンの厚さを一様に減少させた場合、コイル40の抵抗が増加して、ジュール熱による損失(以下、銅損という)が増加する。また、スロット30内でのコイル40の占積率が低下する。これらのことにより、モータ1000の効率を低下させる懸念があった。
一方、本実施形態によれば、コイル40の形状を前述のようにすることで、コイル40の銅損増加、及びスロット30内でのコイル40の占積率の低下を抑制できる。このことにより、モータ1000の効率低下を抑制できる。
なお、コイル40及びステータ100、特にインシュレータ50の形状は、図2,図3Aに示す例に限られず、別の形をとってもよい。
図4は、実施形態1に係る別のステータの要部の断面模式図である。図4に示すコイル40は、図2,図3Aに示すコイル40と同様に、第3の辺部46に含まれる第1~第nターン431~43nのそれぞれの厚さが、第4の辺部47に含まれる第1~第nターン431~43nのそれぞれの厚さよりも薄くなっている。
一方、図4に示すインシュレータ50における遅れ側の端面には、径方向に互いに離間した複数の溝部50aが設けられている。第3の辺部46に含まれる第1~第nターン431~43nのそれぞれが、溝部50aに収容されている。
コイル40及びステータ100をこのように構成してもよい。この場合も、図3Bに示す構成に比べて、第3の辺部46の径方向内側の端面が、径方向外側に後退しているため、遅れ側でコイル40を鎖交する磁束量を減らすことができる。このことにより、渦電流損を低減してモータ1000の効率が低下するのを抑制できる。
図4に示す構成では、各溝部50aに第1~第nターン431~43nの一部が収容されている。このため、図3Aに示す構成に比べて、第3の辺部46の径方向内側の端面が、径方向外側に後退する量は小さくなる。一方で、遅れ側で、第1~第nターン431~43nが互いに間隔をあけて配置されているため、磁石230及びコイル40で発生した磁束がコイル40を鎖交する磁束量は、図3Aに示す構成に比べてそれほど増加しない。
図4に示す構成において、インシュレータ50に溝部50aを設ける代わりに、第3の辺部46に含まれる第1~第nターン431~43nのそれぞれの間に、絶縁スペーサまたは絶縁紙を挟み込むようにしてもよい。
本実施形態に係るモータ1000は、出力軸210を軸心に有するロータ200と、ロータ200の径方向外側にロータ200と所定の間隔をあけて設けられたステータ100と、を少なくとも備えている。
ステータ100は、環状のヨーク20と、ヨーク20の内周に接続された複数のティース10と、複数のティース10のそれぞれに装着された複数のコイル40と、を少なくとも有している。
本実施形態によれば、遅れ側でコイル40を鎖交する磁束量が減少する。このため、渦電流損を低減して、モータ1000の効率が低下するのを抑制できる。
モータ1000が主として一方向のみに回転するのか、あるいは、時計回り方向及び反時計回り方向の両方向に回転するのかは、モータ1000の仕様によって異なる。しかし、電動自動車の主機モータ等に代表されるように、モータが主として一方向のみに回転して使用される例は多い。このようなモータとして、モータ1000を適用することで、渦電流損の低減度合いが高まり、モータ1000の効率低下をより確実に抑制できる。
コイル40は、単層巻きされた状態でティース10に装着されていることが好ましい。このようにすることで、コイル40の構造を単純化でき、コイル40の製造コストが増加するのを抑制できる。また、ティース10に巻回されるコイル40のトータルのターン数の設計が容易となる。ただし、コイル40は、多層巻きされた状態でティース10に装着されていてもよい。
遅れ側でコイル40を鎖交する磁束量を減少させるという観点から言えば、遅れ側と進み側とで、コイル40の第1~第nターン431~43nの形状が異なるようにすればよい。言い換えると、遅れ側に位置する第1~第nターン431~43nの体積が、進み側に位置する第1~第nターン431~43nの体積よりも小さくなるようにすればよい。特にロータ200に近い側で、この関係が成立すればよい。
以上のように、本実施形態のコイル40は、モータ1000のステータに装着されるコイル40であって、モータ1000は、ステータ100と、軸心に出力軸210を、外周側に複数の磁石230をそれぞれ有するとともに、ステータ100の径方向内側に配置されたロータ200と、を少なくとも有し、コイル40は、螺旋状に巻回された第1~第n(nは2以上の整数)ターン431~43nからなる巻線部43と、第1ターン431から延びる第1のリード部41と、第nターン43nから延びる第2のリード部42と、を少なくとも有し、第1~第nターン431~43nの一部または全部の形状が、磁石230またはコイル40で発生した磁束がコイル40に鎖交する部分において、他の部分と異なる。
これにより、コイルで発生する渦電流損を低減することができる。
また、ロータ200の主回転方向の遅れ側と進み側とで、第1~第nターン431~43nの一部または全部の形状が異なってもよい。
また、ロータ200の主回転方向の遅れ側に位置する第1~第nターン431~43nのうち、一部のターンまたは全部のターンのそれぞれの厚さが、ロータ200の主回転方向の進み側に位置する第1~第nターン431~43nのそれぞれの厚さよりも薄くてもよい。
また、本実施形態のモータ1000は、軸心に出力軸210を、外周側に複数の磁石230をそれぞれ有するロータ200と、ロータ200の径方向外側にロータ200と所定の間隔をあけて設けられたステータ100と、を少なくとも備え、ステータ100は、環状のヨーク20と、ヨーク20の内周に接続された複数のティース10と、複数のティース10のそれぞれに装着された複数のコイル40と、を少なくとも有し、複数のコイル40のそれぞれは、実施形態1,2及び変形例1~6のいずれかに記載のコイル40である。
また、コイル40は、単層巻きされた状態でティース10に装着されていてもよい。
このことに応じて、コイル40の形状は、本実施形態に示した形状に限定されず、種々の形状をとりうる。以降、コイル40の形状のバリエーションについて変形例により説明する。
<変形例1>
図5は、変形例1に係るステータの要部の断面模式図である。図6は、変形例1に係る別のステータの要部の断面模式図である。なお、図5,図6及び以降に示す各図面において、実施形態1と同様の箇所については同一の符号を付して詳細な説明を省略する。
図5は、変形例1に係るステータの要部の断面模式図である。図6は、変形例1に係る別のステータの要部の断面模式図である。なお、図5,図6及び以降に示す各図面において、実施形態1と同様の箇所については同一の符号を付して詳細な説明を省略する。
図5に示す本変形例の構成は、遅れ側に位置する第3の辺部46に含まれる第1~第nターン431~43nのうち、ロータ200に近い側のターンの厚さのみが、他のターンよりも薄くなっている点で、実施形態1に示す構成と異なっている。本変形例では、遅れ側で、第nターン43nを含んで2つのターンのみの厚さが、他のターンよりも薄くなっている。しかし、特にこれに限定されない。モータ1000の仕様、及び、鎖交磁束量の減少度合いの要請等に応じて、適宜変更されうる。
本変形例によれば、実施形態1に示す構成と同様に、モータ1000が主回転方向に回転するときに、磁石230及びコイル40で発生した磁束がコイル40を鎖交する磁束量を減らすことができる。このことにより、渦電流損を低減してモータ1000の効率が低下するのを抑制できる。
また、実施形態1に示す構成に比べて、第3の辺部46において、厚さを薄くするターン数を減らすことができる。このことにより、コイル40の銅損が増加するのをさらに抑制できる。また、スロット30内でのコイル40の占積率の低下を抑制できる。このことにより、モータ1000の効率低下をさらに抑制できる。
図6に示すように、厚さを薄くしたターンの位置や数に応じて溝部50aを配置するようにしてもよい。このようにすることで、図5に示す構成が奏するのと同様の効果を奏することができる。
また、図6に示す構成において、インシュレータ50に溝部50aを設ける代わりに、第3の辺部46に含まれる第1~第nターン431~43nののうち厚さを薄くしたターンの間に、絶縁スペーサ又は絶縁紙を挟み込むようにしてもよい。
以上のように、本変形例のコイル40は、ロータ200の主回転方向の遅れ側に位置する第1~第nターン431~43nのうちロータ200に近い1つまたは複数のターンの厚さが、他のターンの厚さよりも薄い。
<変形例2>
図7は、変形例2に係るステータの要部の断面模式図である。図8は、変形例2に係る別のステータの要部の断面模式図である。
図7は、変形例2に係るステータの要部の断面模式図である。図8は、変形例2に係る別のステータの要部の断面模式図である。
図7に示す本変形例の構成は、遅れ側に位置する第3の辺部46に含まれる第kターン(kは整数で、1≦k≦n)の幅、この場合は周方向の幅が、進み側に位置する第4の辺部47に含まれる第kターンの幅よりも狭くなっている点で、実施形態1に示す構成と異なっている。
また、インシュレータ51の厚さが、進み側よりも遅れ側で厚くなっている点で、実施形態1に示すインシュレータ50と異なっている。
本変形例に示すようにコイル40の形状を規定してもよい。この場合も、遅れ側に位置する第1~第nターン431~43nの体積が、進み側に位置する第1~第nターン431~43nの体積よりも小さくなるため、実施形態1に示す構成が奏するのと同様の効果を奏することができる。
インシュレータ51を図7に示す形状とすることで、スロット30内の隙間を埋めて、ステータ100を安定させることができる。
また、図8に示すように、遅れ側において、幅が狭くなっている第kターンを、第1~第nターン431~43nのうちで、ロータ200に近い側のみに配置するようにしてもよい。なお、本変形例では、第kターンに対応するのは、第nターン43nと第(n-1)ターンの2つのターンのみである。しかし、特にこれに限定されない。モータ1000の仕様や、鎖交磁束量の減少度合いの要請等に応じて、適宜変更されうる。
この場合も、図7に示す構成と同様に、モータ1000が主回転方向に回転するときに、磁石230及びコイル40で発生した磁束がコイル40を鎖交する磁束量を減らすことができる。このことにより、渦電流損を低減してモータ1000の効率が低下するのを抑制できる。また、図7に示す構成に比べて、第3の辺部46において、所定の値から幅を狭くするターン数を減らすことができる。このことにより、コイル40の銅損が増加するのをさらに抑制できる。また、スロット30内でのコイル40の占積率の低下を抑制できる。このことにより、モータ1000の効率低下をさらに抑制できる。
なお、図8に示すように、所定の値から幅を狭くしたターンの位置や数に応じて、インシュレータ51の厚さを径方向に沿って変更するようにしてもよい。
以上のように、本変形例のコイル40は、ロータ200の主回転方向の遅れ側に位置する第kターン(kは整数で、1≦k≦n)の幅が、ロータ200の主回転方向の進み側に位置する第kターンに対応するターンの幅よりも狭い。
また、第kターンは、第1~第nターン431~43nの中でロータ200に近い側に位置していてもよい。
<変形例3>
図9は、変形例3に係るコイルの側面図である。図10は、第3の辺部と第4の辺部の部分模式図である。なお、図9は、コイル40を径方向内側から見た側面図である。
図9は、変形例3に係るコイルの側面図である。図10は、第3の辺部と第4の辺部の部分模式図である。なお、図9は、コイル40を径方向内側から見た側面図である。
図9,図10に示す本変形例の構成は、第3の辺部46に、コイル40を径方向に見た時に凹形形状を示す第1凹部46aが形成されている点で、実施形態1に示す構成と異なっている。なお、図9,図10に示す本変形例のコイル40は、図3Bに示すコイル40と同様に、第3の辺部46と第4の辺部47とで、第1~第nターン431~43nのそれぞれの厚さが等しい。第3の辺部46に含まれる第1~第nターン431~43nのそれぞれの幅が、第4の辺部47に含まれる第1~第nターン431~43nのそれぞれの幅と等しい。
このようにすることで、遅れ側で、磁石230及びコイル40で発生した磁束が鎖交する部分のコイル40の体積を減らして、渦電流損を低減することができる。このことにより、モータ1000の効率が低下するのを抑制できる。
また、本変形例によれば、第3の辺部46において、磁石230及びコイル40で発生した磁束が鎖交する部分を予めシミュレートして、その部分に第1凹部46aを形成することができる。このようにすることで、実施形態1や変形例1,2に示す構成よりも、コイル40の体積を増やすことができる。つまり、銅損がさらに低減されるため、モータ1000の効率を高く維持することができる。
図9に示すように、第4の辺部47に第2凹部47aが形成されていてもよい。ただし、第1凹部46aと第2凹部47aとの間に以下のいずれかの関係が成立するようにする必要がある。
(条件1)第1凹部46aの個数X1が第2凹部47aの個数X2よりも多い(X1>X2)。
(条件2)第1凹部46aのサイズが第2凹部47aのサイズよりも大きい。例えば、図10に示すように、第1凹部46aの軸方向の幅A1が第2凹部47aの軸方向の幅A2よりも広くなっている(A1>A2)。あるいは、第1凹部46aの周方向の深さB1が第2凹部47aの周方向の深さB2よりも深くなっている(B1>B2)。
(条件3)条件1及び条件2の両方を満足する。
要するに、第3の辺部46に形成された第1凹部46aの全体の体積が、第4の辺部47に形成された第2凹部47aの全体の体積よりも大きくなるようにすればよい。
モータ1000の構造によっては、磁石230及びコイル40で発生した磁束が第4の辺部47に鎖交する場合がある。このような場合に、本変形例に示すように、第4の辺部47に第2凹部47aを設けることで、進み側でも、磁石230及びコイル40で発生した磁束が鎖交する部分のコイル40の体積を減らして、渦電流損を低減することができる。第1凹部46aの全体の体積が、第2凹部47aの全体の体積よりも大きくなるようにすることで、鎖交磁束量が大きい遅れ側での渦電流損を低減しつつ、銅損の増加を抑制できる。このことにより、モータ1000の効率を高く維持できる。
なお、第1凹部46aは、第3の辺部46の第1~第nターン431~43n全体に形成されなくてもよい。例えば、ロータ200に近い側の第1~第kターンに設けられていてもよい。第2凹部47aについても同様である。
図9では、第4の辺部47に第2凹部47aが形成された例を示したが、第4の辺部47での鎖交磁束量が小さければ、第2凹部47aの形成を省略してもよい。
第1凹部46a、第2凹部47aの位置、個数、及びサイズは、磁石230及びコイル40で発生した磁束がコイル40に鎖交する領域に応じて、適宜変更されうる。
以上のように、本変形例のコイル40は、ロータ200の主回転方向の遅れ側に位置する第1~第nターン431~43nの一部または全部に、少なくとも1つ以上の第1凹部46aが形成されている。
また、ロータの主回転方向の進み側に位置する第1~第nターン431~43nの一部または全部に、少なくとも1つ以上の第2凹部47aが形成されており、第1凹部46aの全体の体積が、第2凹部47aの全体の体積よりも大きいことが好ましい。
<変形例4>
図11は、変形例4に係るコイルの側面図である。図12は、第3の辺部と第4の辺部の部分模式図である。なお、図11は、コイル40を径方向内側から見た側面図である。
図11は、変形例4に係るコイルの側面図である。図12は、第3の辺部と第4の辺部の部分模式図である。なお、図11は、コイル40を径方向内側から見た側面図である。
図11,図12に示す本変形例の構成は、第3の辺部46に、コイル40を貫通する第1スリット46bが形成されている点で、変形例3に示す構成と異なっている。
このように、コイル40の第3の辺部46に第1スリット46bを設けるようにしても、変形例3に示す構成が奏するのと同様の効果を奏することができる。つまり、遅れ側で、磁石230及びコイル40で発生した磁束が鎖交する部分のコイル40の体積を減らして、渦電流損を低減することができる。このことにより、モータ1000の効率が低下するのを抑制できる。また、コイル40の体積減少を抑制できる。このため、銅損がさらに低減され、モータ1000の効率を高く維持することができる。
また、第4の辺部47に第2スリット47bが形成されていてもよい。ただし、第1スリット46bと第2スリット47bとの間に以下のいずれかの関係が成立するようにする必要がある。
(条件4)第1スリット46bの個数X3が第2スリット47bの個数X4よりも多い(X3>X4)。
(条件5)第1スリット46bのサイズが第2スリット47bのサイズよりも大きい。例えば、図12に示すように、第1スリット46bの軸方向の幅A3が第2スリット47bの軸方向の幅A4よりも広くなっている(A3>A4)。あるいは、第1スリット46bの周方向の幅B3が第2スリット47bの周方向の幅B4よりも広くなっている(B3>B4)。
(条件6)条件4及び条件5の両方を満足する。
要するに、第3の辺部46に形成された第1スリット46bの全体の体積が、第4の辺部47に形成された第2スリット47bの全体の体積よりも大きくなるようにすればよい。
このようにすることで、進み側でも、磁石230及びコイル40で発生した磁束が鎖交する部分のコイル40の体積を減らして、渦電流損を低減することができる。また、鎖交磁束量が大きい遅れ側での渦電流損を低減しつつ、銅損の増加を抑制できる。このことにより、モータ1000の効率を高く維持できる。
なお、第1スリット46bは、第3の辺部46の第1~第nターン431~43n全体に形成されなくてもよい。例えば、ロータ200に近い側の第1~第kターンに設けられていてもよい。第2スリット47bについても同様である。
また、図12では、第4の辺部47に第2スリット47bが形成された例を示したが、第4の辺部47での鎖交磁束量が小さければ、図11に示すように、第2スリット47bの形成を省略してもよい。
また、第1スリット46b、第2スリット47bの位置、個数、及びサイズは、磁石230及びコイル40で発生した磁束がコイル40に鎖交する領域に応じて、適宜変更されうる。
以上のように、本変形例のコイル40は、ロータ200の主回転方向の遅れ側に位置する第1~第nターン431~43nの一部または全部に、少なくとも1つ以上の第1スリット46bが形成されている。
また、ロータ200の主回転方向の進み側に位置する第1~第nターン431~43nの一部または全部に、少なくとも1つ以上の第2スリット47bが形成されており、第1スリット46bの全体の体積が、第2スリット47bの全体の体積よりも大きいことが好ましい。
(実施形態2)
図13は、本発明の実施形態2に係るモータの要部を径方向から見た模式図である。図14は、コイルの斜視図である。
図13は、本発明の実施形態2に係るモータの要部を径方向から見た模式図である。図14は、コイルの斜視図である。
通常、軸方向に関して、ロータコア220の上面と、ティース10及びヨーク20の上面とはほぼ同じ高さにある。同様に、ロータコア220の下面と、ティース10及びヨーク20の下面とはほぼ同じ高さにある。
しかし、モータ1000に要求される性能によっては、図13に示すように、軸方向に関して、ロータコア220が、ステータ100よりも高くなるように設計されることがある。このようにすることで、ティース10やヨーク20に対して、磁石230で発生した磁束を、より多く流すことができ、出力軸210の回転トルクを高めることができる。また、このような構造では、磁石230で発生した磁束が、ステータ100の外部にも流れるため、図示しない磁気センサをロータ200の近傍に配置することで、モータ1000の内部の磁界を容易に検出することができる。
一方、図13に示す構造では、磁石230で発生した磁束が軸方向上側から侵入して第1のコイルエンド44に鎖交する。このため、この部分での渦電流損が増加し、モータ1000の効率が低下するおそれがある。
そこで、本実施形態及び以降に示す変形例5,6に示すコイル40において、実施形態1及び変形例1~4に示した構成を変形して適用する。このことにより、第1のコイルエンド44で発生する渦電流損を低減してモータ1000の効率低下を抑制することができる。
例えば、図14に示すように、第1のコイルエンド44に含まれる第1~第nターン431~43nのそれぞれの厚さは、第2のコイルエンド45に含まれる第1~第nターン431~43nのそれぞれの厚さよりも薄くなっている。
このようにすることで、第1のコイルエンド44の体積を減少させることができ、渦電流損を低減してモータ1000の効率低下を抑制できる。
また、実施形態1及び変形例1~4に示した構成を考慮すると、本願明細書に開示されるコイル40は、以下の構成を備えていると言える。
つまり、コイル40は、モータ1000のステータ100に装着される。モータ1000は、ステータ100と、軸心に出力軸210を、外周側に複数の磁石230をそれぞれ有するとともに、ステータ100の径方向内側に配置されたロータ200と、を少なくとも有している。
コイル40は、螺旋状に巻回された第1~第nターン431~43nからなる巻線部43と、第1ターン431から延びる第1のリード部41と、第nターン43nから延びる第2のリード部42と、を少なくとも有している。
第1~第nターン431~43nの一部または全部の形状が、磁石230で発生した磁束がコイル40に鎖交する部分において、他の部分と異なる。あるいは、磁石230で発生した磁束がコイル40に鎖交する部分において、第1~第nターン431~43nの体積が、他の部分の体積よりも小さい。
以上のように、本実施形態のコイル40は、巻線部43は、モータ1000の軸線方向である軸方向の一方に位置する第1のコイルエンド44と、軸方向の他方側に位置する第2のコイルエンド45と、を有しており、第1のコイルエンド44に含まれる第1~第nターン431~43nと第2のコイルエンド45に含まれる第1~第nターン431~43nとで、一部または全部の形状が異なる。
また、第1のコイルエンド44に含まれる第1~第nターン431~43nのうち、一部のターンまたは全部のターンのそれぞれの厚さが、第2のコイルエンド45に含まれる第1~第nターン431~43nのそれぞれの厚さよりも薄いことが好ましい。
<変形例5>
図15は、変形例5に係るコイルの側面図である。図16は、第1のコイルエンドと第2のコイルエンドの部分模式図である。なお、図15は、コイル40を径方向内側から見た側面図である。
図15は、変形例5に係るコイルの側面図である。図16は、第1のコイルエンドと第2のコイルエンドの部分模式図である。なお、図15は、コイル40を径方向内側から見た側面図である。
図15,図16に示す本変形例の構成は、第1のコイルエンド44に、コイル40を径方向に見た時に凹形形状を示す第3凹部44aが形成されている点で、実施形態1,2及び変形例3に示す構成と異なっている。なお、図15,図16に示す本変形例のコイル40は、第1のコイルエンド44と第2のコイルエンド45とで、第1~第nターン431~43nのそれぞれの厚さが等しい。
このようにすることで、鎖交磁束量が多い第1のコイルエンド44において、磁石230で発生した磁束が鎖交する部分の体積を減らして、渦電流損を低減することができる。このことにより、モータ1000の効率が低下するのを抑制できる。
本変形例によれば、第1のコイルエンド44において、磁石230で発生した磁束が鎖交する部分を予めシミュレートして、その部分に第3凹部44aを形成することができる。このようにすることで、実施形態2に示す構成よりも、コイル40の体積を増やすことができる。つまり、銅損がさらに低減される。このため、モータ1000の効率を高く維持することができる。
また、第2のコイルエンド45に第4凹部45aが形成されていてもよい。ただし、第3凹部44aと第4凹部45aとの間に以下のいずれかの関係が成立するようにする必要がある。
(条件7)第3凹部44aの個数X5が第4凹部45aの個数X6よりも多い(X5>X6)。
(条件8)第3凹部44aのサイズが第4凹部45aのサイズよりも大きい。例えば、図16に示すように、第3凹部44aの周方向の幅A5が第4凹部45aの周方向の幅A6よりも広くなっている(A5>A6)。あるいは、第3凹部44aの軸方向の深さB5が第4凹部45aの軸方向の深さB6よりも深くなっている(B5>B6)。
(条件9)条件7及び条件8の両方を満足する。
要するに、第1のコイルエンド44に形成された第3凹部44aの全体の体積が、第2のコイルエンド45に形成された第4凹部45aの全体の体積よりも大きくなるようにすればよい。
モータ1000の構造によっては、磁石230で発生した磁束が第2のコイルエンド45に鎖交する場合がある。このような場合に、第2のコイルエンド45に第4凹部45aを設けてもよい。これにより、磁石230で発生した磁束が鎖交する部分のコイル40の体積を減らして、渦電流損を低減することができる。また、銅損の増加を抑制できる。このことにより、モータ1000の効率を高く維持できる。
なお、第3凹部44aは、第1のコイルエンド44の第1~第nターン431~43n全体に形成されなくてもよい。例えば、ロータ200に近い側の第1~第k(kはnより小さい自然数)ターンに設けられていてもよい。第4凹部45aについても同様である。
また、図15では、第2のコイルエンド45に第4凹部45aが形成された例を示した。しかし、第2のコイルエンド45での鎖交磁束量が小さければ、第4凹部45aの形成を省略してもよい。
また、第3凹部44a及び第4凹部45aの位置、個数、及びサイズは、磁石230で発生した磁束がコイル40に鎖交する領域に応じて、適宜変更されうる。
以上のように、本変形例のコイル40は、第1のコイルエンド44に含まれる第1~第nターン431~43nの一部または全部に、少なくとも1つ以上の第3凹部44aが形成されている。
また、第2のコイルエンド45に含まれる第1~第nターン431~43nの一部または全部に、少なくとも1つ以上の第4凹部45aが形成されており、第3凹部44aの全体の体積が、第4凹部45aの全体の体積よりも大きいことが好ましい。
<変形例6>
図17は、変形例6に係るコイルの側面図である。図18は、第1のコイルエンドと第2のコイルエンドの部分模式図であるなお、図11は、コイル40を径方向内側から見た側面図である。
図17は、変形例6に係るコイルの側面図である。図18は、第1のコイルエンドと第2のコイルエンドの部分模式図であるなお、図11は、コイル40を径方向内側から見た側面図である。
図17,図18に示す本変形例の構成は、第1のコイルエンド44に第3スリット44bが形成されている点で、変形例5に示す構成と異なっている。
このように、コイル40の第1のコイルエンド44に第3スリット44bを設けるようにしても、変形例4に示す構成が奏するのと同様の効果を奏することができる。鎖交磁束量が多い第1のコイルエンド44において、磁石230で発生した磁束が鎖交する部分の体積を減らして、渦電流損を低減することができる。また、銅損を低減できる。これらのことにより、モータ1000の効率が低下するのを抑制できる。
第2のコイルエンド45に第4スリット45bが形成されていてもよい。ただし、第3スリット44bと第4スリット45bとの間に以下のいずれかの関係が成立するようにする必要がある。
(条件10)第3スリット44bの個数X7が第4スリット45bの個数Y8よりも多い(X7>X8)。
(条件11)第3スリット44bのサイズが第4スリット45bのサイズよりも大きい。例えば、図18に示すように、第3スリット44bの軸方向の幅A7が第4スリット45bの軸方向の幅A8よりも広くなっている(A7>A8)。あるいは、第3スリット44bの周方向の幅B7が第4スリット45bの周方向の幅B8よりも広くなっている(B7>B8)。
(条件12)条件10及び条件11の両方を満足する。
要するに、第1のコイルエンド44に形成された第3スリット44bの全体の体積が、第2のコイルエンド45に形成された第4スリット45bの全体の体積よりも大きくなるようにすればよい。
このようにすることで、鎖交磁束量が多い第1のコイルエンド44において、磁石230で発生した磁束が鎖交する部分の体積を減らして、渦電流損を低減することができる。このことにより、モータ1000の効率が低下するのを抑制できる。また、銅損の増加を抑制できる。このことにより、モータ1000の効率を高く維持できる。
なお、第3スリット44bは、第1のコイルエンド44の第1~第nターン431~43n全体に形成されなくてもよい。例えば、ロータ200に近い側の第1~第kターンに設けられていてもよい。第4スリット45bについても同様である。
また、図18では、第2のコイルエンド45に第4スリット45bが形成された例を示したが、第2のコイルエンド45での鎖交磁束量が小さければ、図17に示すように、第4スリット45bの形成を省略してもよい。
また、第3スリット44b及び第4スリット45bの位置、個数、及びサイズは、磁石230で発生した磁束がコイル40に鎖交する領域に応じて、適宜変更されうる。
以上のように、本変形例のコイル40は、第1のコイルエンド44に含まれる第1~第nターン431~43nの一部または全部に、少なくとも1つ以上の第3スリット44bが形成されている。
また、第2のコイルエンド45に含まれる第1~第nターン431~43nの一部または全部に、少なくとも1つ以上の第4スリット45bが形成されており、第3スリット44bの全体の体積が、第4スリット45bの全体の体積よりも大きいことが好ましい。
(その他の実施形態)
なお、各変形例を含む実施形態に示した各構成要素を適宜組み合わせて新たな実施形態とすることもできる。例えば、変形例5に示す巻線部43を実施形態及び変形例1~4,6に示す構成に適用するようにしてもよい。
なお、各変形例を含む実施形態に示した各構成要素を適宜組み合わせて新たな実施形態とすることもできる。例えば、変形例5に示す巻線部43を実施形態及び変形例1~4,6に示す構成に適用するようにしてもよい。
例えば、変形例3に示すコイル40において、第1のコイルエンド44に第3凹部44aを設けるようにしてもよい。第2のコイルエンド45に第4凹部45aを設けるようにしてもよい。このようにすることで、図13に示す構造のモータ1000において、磁石230で発生した磁束がコイル40に鎖交する部分での渦電流損を確実に低減できる。また、銅損が増加するのを抑制できる。これらのことにより、モータ1000の効率を高く維持できる。
実施形態2や変形例5,6では、磁石230で発生した磁束が第1のコイルエンド44に鎖交する例を示したが、モータ1000の構造によっては、磁石230で発生した磁束が第2のコイルエンド45に鎖交することもある。このような場合は、第1のコイルエンド44に施された変形を第2のコイルエンド45に施すようにするとよい。例えば、第2のコイルエンド45に含まれる第1~第nターン43nのそれぞれの厚さを、第1のコイルエンド44に含まれる第1~第nターン43nのそれぞれの厚さよりも薄くするようにする。または、第2のコイルエンド45に形成された第4凹部45aの全体の体積を、第1のコイルエンド44に形成された第3凹部44aの全体の体積よりも大きくなるようにする。あるいは、第2のコイルエンド45に形成された第4スリット45bの全体の体積を、第1のコイルエンド44に形成された第3スリット44bの全体の体積よりも大きくなるようにする。
このようにすることで、磁石230で発生した磁束がコイル40に鎖交する部分での渦電流損を確実に低減できる。また、銅損が増加するのを抑制できる。これらのことにより、モータ1000の効率を高く維持できる。
なお、コイル40を構成する導線の断面形状は四角形に特に限定されず、他の形状であってもよい。例えば、m角形(mは3以上の整数)であってもよい。また、楕円形であってもよい。
本発明のコイルは、ロータに設けられた磁石やコイルに起因した渦電流損を低減できる。このため、高い効率が要求されるモータに適用する上で有用である。
10 ティース
20 ヨーク
30 スロット
40 コイル
41 第1のリード部
42 第2のリード部
43 巻線部
431~43n 第1~第nターン
44 第1のコイルエンド(第1の辺部)
44a 第3凹部
44b 第3スリット
45 第2のコイルエンド(第2の辺部)
45a 第4凹部
45b 第4スリット
46 第3の辺部(遅れ側)
46a 第1凹部
46b 第1スリット
47 第4の辺部(進み側)
47a 第2凹部
47b 第2スリット
50,51 インシュレータ
50a 溝部
100 ステータ
200 ロータ
210 出力軸
220 ロータコア
230 磁石
1000 モータ
20 ヨーク
30 スロット
40 コイル
41 第1のリード部
42 第2のリード部
43 巻線部
431~43n 第1~第nターン
44 第1のコイルエンド(第1の辺部)
44a 第3凹部
44b 第3スリット
45 第2のコイルエンド(第2の辺部)
45a 第4凹部
45b 第4スリット
46 第3の辺部(遅れ側)
46a 第1凹部
46b 第1スリット
47 第4の辺部(進み側)
47a 第2凹部
47b 第2スリット
50,51 インシュレータ
50a 溝部
100 ステータ
200 ロータ
210 出力軸
220 ロータコア
230 磁石
1000 モータ
Claims (18)
- モータのステータに装着されるコイルであって、
前記モータは、
前記ステータと、
軸心に出力軸を、外周側に複数の磁石をそれぞれ有するとともに、前記ステータの径方向内側に配置されたロータと、を少なくとも有し、
前記コイルは、
螺旋状に巻回された第1~第n(nは2以上の整数)ターンからなる巻線部と、
前記第1ターンから延びる第1のリード部と、
前記第nターンから延びる第2のリード部と、を少なくとも有し、
前記第1~第nターンの一部または全部の形状が、前記磁石または前記コイルで発生した磁束が前記コイルに鎖交する部分において、他の部分と異なるコイル。 - 前記ロータの主回転方向の遅れ側と進み側とで、前記第1~第nターンの一部または全部の形状が異なる請求項1に記載のコイル。
- 前記ロータの主回転方向の遅れ側に位置する前記第1~第nターンのうち、一部のターンまたは全部のターンのそれぞれの厚さが、前記ロータの主回転方向の進み側に位置する前記第1~第nターンのそれぞれの厚さよりも薄い請求項2に記載のコイル。
- 前記ロータの主回転方向の遅れ側に位置する前記第1~第nターンのうち前記ロータに近い1つまたは複数のターンの厚さが、他のターンの厚さよりも薄い請求項3に記載のコイル。
- 前記ロータの主回転方向の遅れ側に位置する第kターン(kは整数で、1≦k≦n)の幅が、前記ロータの主回転方向の進み側に位置する第kターンに対応するターンの幅よりも狭い請求項2に記載のコイル。
- 前記第kターンは、前記第1~第nターンの中で前記ロータに近い側に位置している請求項5に記載のコイル。
- 前記ロータの主回転方向の遅れ側に位置する前記第1~第nターンの一部または全部に、少なくとも1つ以上の第1凹部が形成されている請求項2に記載のコイル。
- 前記ロータの主回転方向の進み側に位置する前記第1~第nターンの一部または全部に、少なくとも1つ以上の第2凹部が形成されており、
前記第1凹部の全体の体積が、前記第2凹部の全体の体積よりも大きい請求項7に記載のコイル。 - 前記ロータの主回転方向の遅れ側に位置する前記第1~第nターンの一部または全部に、少なくとも1つ以上の第1スリットが形成されている請求項2に記載のコイル。
- 前記ロータの主回転方向の進み側に位置する前記第1~第nターンの一部または全部に、少なくとも1つ以上の第2スリットが形成されており、
前記第1スリットの全体の体積が、前記第2スリットの全体の体積よりも大きい請求項9に記載のコイル。 - 前記巻線部は、
前記モータの軸線方向である軸方向の一方に位置する第1のコイルエンドと、
前記軸方向の他方側に位置する第2のコイルエンドと、を有しており、
前記第1のコイルエンドに含まれる前記第1~第nターンと前記第2のコイルエンドに含まれる前記第1~第nターンとで、一部または全部の形状が異なる請求項1から10のいずれか1項に記載のコイル。 - 前記第1のコイルエンドに含まれる前記第1~第nターンのうち、一部のターンまたは全部のターンのそれぞれの厚さが、前記第2のコイルエンドに含まれる前記第1~第nターンのそれぞれの厚さよりも薄い請求項11に記載のコイル。
- 前記第1のコイルエンドに含まれる前記第1~第nターンの一部または全部に、少なくとも1つ以上の第3凹部が形成されている請求項11に記載のコイル。
- 前記第2のコイルエンドに含まれる前記第1~第nターンの一部または全部に、少なくとも1つ以上の第4凹部が形成されており、
前記第3凹部の全体の体積が、前記第4凹部の全体の体積よりも大きい請求項13に記載のコイル。 - コイルにおいて、
前記第1のコイルエンドに含まれる前記第1~第nターンの一部または全部に、少なくとも1つ以上の第3スリットが形成されている請求項11に記載のコイル。 - 前記第2のコイルエンドに含まれる前記第1~第nターンの一部または全部に、少なくとも1つ以上の第4スリットが形成されており、
前記第3スリットの全体の体積が、前記第4スリットの全体の体積よりも大きい請求項15に記載のコイル。 - 軸心に出力軸を、外周側に複数の磁石をそれぞれ有するロータと、前記ロータの径方向外側に前記ロータと所定の間隔をあけて設けられたステータと、を少なくとも備え、
前記ステータは、
環状のヨークと、
前記ヨークの内周に接続された複数のティースと、
前記複数のティースのそれぞれに装着された複数のコイルと、を少なくとも有し、
前記複数のコイルのそれぞれは、請求項1から16のいずれか1項に記載のコイルであるモータ。 - 前記コイルは、単層巻きされた状態で前記ティースに装着されている請求項17に記載のモータ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021563759A JPWO2021117320A1 (ja) | 2019-12-12 | 2020-10-01 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019-224773 | 2019-12-12 | ||
| JP2019224773 | 2019-12-12 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2021117320A1 true WO2021117320A1 (ja) | 2021-06-17 |
Family
ID=76329366
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2020/037389 WO2021117320A1 (ja) | 2019-12-12 | 2020-10-01 | コイル及びそれを備えたモータ |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JPWO2021117320A1 (ja) |
| WO (1) | WO2021117320A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2024154677A1 (ja) * | 2023-01-17 | 2024-07-25 | パナソニックIpマネジメント株式会社 | モータ |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006014530A (ja) * | 2004-06-28 | 2006-01-12 | Sumitomo Electric Ind Ltd | コイルとその製造方法 |
| JP2008167593A (ja) * | 2006-12-28 | 2008-07-17 | Toyota Motor Corp | モータの固定子及びモータのコイル製造方法 |
| JP2012186938A (ja) * | 2011-03-07 | 2012-09-27 | Denso Corp | 電機子 |
| JP5805046B2 (ja) * | 2012-10-15 | 2015-11-04 | 三菱電機株式会社 | 車両用電動機および車両用発電機 |
| JP2018117480A (ja) * | 2017-01-20 | 2018-07-26 | アイシン・エィ・ダブリュ株式会社 | コイル、ステータおよびコイルの製造方法 |
| WO2019203076A1 (ja) * | 2018-04-18 | 2019-10-24 | パナソニックIpマネジメント株式会社 | コイル及びそれを用いたモータ |
-
2020
- 2020-10-01 JP JP2021563759A patent/JPWO2021117320A1/ja active Pending
- 2020-10-01 WO PCT/JP2020/037389 patent/WO2021117320A1/ja active Application Filing
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006014530A (ja) * | 2004-06-28 | 2006-01-12 | Sumitomo Electric Ind Ltd | コイルとその製造方法 |
| JP2008167593A (ja) * | 2006-12-28 | 2008-07-17 | Toyota Motor Corp | モータの固定子及びモータのコイル製造方法 |
| JP2012186938A (ja) * | 2011-03-07 | 2012-09-27 | Denso Corp | 電機子 |
| JP5805046B2 (ja) * | 2012-10-15 | 2015-11-04 | 三菱電機株式会社 | 車両用電動機および車両用発電機 |
| JP2018117480A (ja) * | 2017-01-20 | 2018-07-26 | アイシン・エィ・ダブリュ株式会社 | コイル、ステータおよびコイルの製造方法 |
| WO2019203076A1 (ja) * | 2018-04-18 | 2019-10-24 | パナソニックIpマネジメント株式会社 | コイル及びそれを用いたモータ |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2024154677A1 (ja) * | 2023-01-17 | 2024-07-25 | パナソニックIpマネジメント株式会社 | モータ |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2021117320A1 (ja) | 2021-06-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7977826B2 (en) | Multipole permanent-magnet synchronous machine having tooth-wound coils | |
| JP5066062B2 (ja) | 回転電機および回転電機の製造方法 | |
| JP3971692B2 (ja) | スロットレス永久磁石式回転電機及びその巻線製造方法 | |
| US6236135B1 (en) | Toroidal core type actuator with phase separator | |
| WO2009084473A1 (ja) | ステータ及びこれを用いた回転電機 | |
| JP5619046B2 (ja) | 回転電機およびそれに用いられるステータの製造方法 | |
| TWI345352B (ja) | ||
| WO2014102950A1 (ja) | 回転電機 | |
| US20120086288A1 (en) | Electric rotating machine | |
| JP6234002B2 (ja) | 永久磁石を備える同期電動機 | |
| JP5325785B2 (ja) | 回転電気機械のためのステータ | |
| WO2018066654A1 (ja) | 同期リラクタンス型回転電機 | |
| CN109478813B (zh) | 轴向间隙型旋转电机 | |
| WO2021117320A1 (ja) | コイル及びそれを備えたモータ | |
| WO2021131575A1 (ja) | コイル及びそれを備えたステータ、モータ | |
| JP6210705B2 (ja) | 回転電機およびそれに用いられる固定子 | |
| JP2014207785A (ja) | モータ | |
| JP5239571B2 (ja) | 回転電機 | |
| JPWO2021117320A5 (ja) | ||
| JP2005124378A (ja) | リング状の固定子コイルを有する誘導電動機 | |
| JP5884464B2 (ja) | 回転電機 | |
| WO2003096519A2 (fr) | Moteur a induction dont les enroulements de stator sont divises axialement | |
| JP6747834B2 (ja) | ステータ | |
| JP7172809B2 (ja) | 回転電機 | |
| JP2005253280A (ja) | リング状の固定子コイルを有するアウターロータ形のブラシレスdcモータ及びacサーボモータ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 20897845 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2021563759 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 20897845 Country of ref document: EP Kind code of ref document: A1 |