WO2021075090A1 - 補正パラメータ算出方法、変位量算出方法、補正パラメータ算出装置、及び、変位量算出装置 - Google Patents
補正パラメータ算出方法、変位量算出方法、補正パラメータ算出装置、及び、変位量算出装置 Download PDFInfo
- Publication number
- WO2021075090A1 WO2021075090A1 PCT/JP2020/025232 JP2020025232W WO2021075090A1 WO 2021075090 A1 WO2021075090 A1 WO 2021075090A1 JP 2020025232 W JP2020025232 W JP 2020025232W WO 2021075090 A1 WO2021075090 A1 WO 2021075090A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- displacement
- correction parameter
- displacement amount
- actual size
- image data
- Prior art date
Links
Images









Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/002—Measuring arrangements characterised by the use of optical techniques for measuring two or more coordinates
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/02—Measuring arrangements characterised by the use of optical techniques for measuring length, width or thickness
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/02—Measuring arrangements characterised by the use of optical techniques for measuring length, width or thickness
- G01B11/022—Measuring arrangements characterised by the use of optical techniques for measuring length, width or thickness by means of tv-camera scanning
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/02—Measuring arrangements characterised by the use of optical techniques for measuring length, width or thickness
- G01B11/026—Measuring arrangements characterised by the use of optical techniques for measuring length, width or thickness by measuring distance between sensor and object
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/02—Measuring arrangements characterised by the use of optical techniques for measuring length, width or thickness
- G01B11/03—Measuring arrangements characterised by the use of optical techniques for measuring length, width or thickness by measuring coordinates of points
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/16—Measuring arrangements characterised by the use of optical techniques for measuring the deformation in a solid, e.g. optical strain gauge
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/24—Measuring arrangements characterised by the use of optical techniques for measuring contours or curvatures
- G01B11/25—Measuring arrangements characterised by the use of optical techniques for measuring contours or curvatures by projecting a pattern, e.g. one or more lines, moiré fringes on the object
- G01B11/2518—Projection by scanning of the object
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C3/00—Measuring distances in line of sight; Optical rangefinders
- G01C3/02—Details
- G01C3/06—Use of electric means to obtain final indication
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S11/00—Systems for determining distance or velocity not using reflection or reradiation
- G01S11/12—Systems for determining distance or velocity not using reflection or reradiation using electromagnetic waves other than radio waves
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06K—GRAPHICAL DATA READING; PRESENTATION OF DATA; RECORD CARRIERS; HANDLING RECORD CARRIERS
- G06K7/00—Methods or arrangements for sensing record carriers, e.g. for reading patterns
- G06K7/10—Methods or arrangements for sensing record carriers, e.g. for reading patterns by electromagnetic radiation, e.g. optical sensing; by corpuscular radiation
- G06K7/14—Methods or arrangements for sensing record carriers, e.g. for reading patterns by electromagnetic radiation, e.g. optical sensing; by corpuscular radiation using light without selection of wavelength, e.g. sensing reflected white light
- G06K7/1404—Methods for optical code recognition
- G06K7/1408—Methods for optical code recognition the method being specifically adapted for the type of code
- G06K7/1417—2D bar codes
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Electromagnetism (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Health & Medical Sciences (AREA)
- Toxicology (AREA)
- Artificial Intelligence (AREA)
- General Health & Medical Sciences (AREA)
- Theoretical Computer Science (AREA)
- Length Measuring Devices By Optical Means (AREA)
Abstract
補正パラメータ算出方法は、特定の座標を検出可能なマーカ(60)が取り付けられた対象物(50)を撮像して得られる画像データを撮像装置(10)から取得する取得ステップ(S11)と、画像データに含まれるマーカ(60)に基づいて、特定の座標を検出する検出ステップ(S12)と、検出結果に基づいて、撮像装置(10)の位置を推定する推定ステップ(S13)と、撮像装置(10)の位置に基づいて、撮像装置(10)から対象物(50)までの距離データを算出する距離算出ステップ(S14)と、対象物(50)の画素変位量を実寸変位量に換算するための補正パラメータを、距離データを用いて算出するパラメータ算出ステップ(S15)とを含む。
Description
本開示は、画像を用いて対象物の動きを示す変位の実寸値である実寸変位量を計測するための補正パラメータを算出する補正パラメータ算出方法、変位量算出方法、補正パラメータ算出装置、及び、変位量算出装置に関する。
従来、カメラで対象物を撮像した画像データと、レーザ距離計などの距離計測装置で計測した対象物までの距離測定値とを用いて、対象物の周囲の状態を非接触測定できる撮像装置が開示されている(特許文献1参照)。状態とは、例えば、対象物が橋梁である場合、橋梁の撓み量などである。
ところで、画像を用いた変位計測において、簡便に変位量の実寸値を計測できることが望まれる。上記特許文献1の撮像装置においては、カメラ以外に距離計測装置が必要となり、簡便に変位量の実寸値が計測できるとは言いがたい。
そこで、本開示は、画像を用いた変位計測において、変位量を実寸値に換算するための補正パラメータを簡便に算出することができる補正パラメータ算出方法等に関する。
本開示の一態様に係る補正パラメータ算出方法は、画像を用いて対象物の動きを示す変位の実寸値である実寸変位量を計測するための補正パラメータを算出する補正パラメータ算出方法であって、特定の座標を検出可能なマーカが取り付けられた前記対象物を撮像して得られる第1画像データを撮像装置から取得する第1取得ステップと、前記第1画像データに含まれる前記マーカに基づいて、前記特定の座標を検出する検出ステップと、前記特定の座標の検出結果と、前記撮像装置のパラメータとに基づいて、前記撮像装置の位置を推定する推定ステップと、前記特定の座標と前記撮像装置の位置とに基づいて、前記撮像装置から前記対象物までの距離データを算出する距離算出ステップと、前記撮像装置が互いに異なるタイミングで撮像した2以上の第2画像データにおける前記対象物の計測点の画素変位量を実寸変位量に換算するための前記補正パラメータを、前記距離データを用いて算出するパラメータ算出ステップとを含む。
本開示の一態様に係る変位量算出方法は、上記の補正パラメータ算出方法を用いて算出された前記補正パラメータを取得する第3取得ステップと、前記2以上の第2画像データを取得する第4取得ステップと、前記補正パラメータに基づいて、前記2以上の第2画像データにおける前記画素変位量を前記実寸変位量に換算する換算ステップとを含む。
本開示の一態様に係る補正パラメータ算出装置は、画像を用いて対象物の動きを示す変位の実寸値である実寸変位量を計測するための補正パラメータを算出する補正パラメータ算出装置であって、特定の座標を検出可能なマーカが取り付けられた前記対象物を撮像して得られる第1画像データを撮像装置から取得する第1取得部と、前記第1画像データに含まれる前記マーカに基づいて、前記特定の座標を検出する位置検出部と、前記特定の座標の検出結果と、前記撮像装置のパラメータとに基づいて、前記撮像装置の位置を推定する位置推定部と、前記特定の座標と前記撮像装置の位置とに基づいて、前記撮像装置から前記対象物までの距離データを算出する距離算出部と、前記撮像装置が互いに異なるタイミングで撮像した2以上の第2画像データに基づく前記対象物の計測点の画素変位量を実寸変位量に換算するための前記補正パラメータを、前記距離データを用いて算出するパラメータ算出部とを備える。
本開示の一態様に係る変位量算出装置は、上記の補正パラメータ算出装置を用いて算出された前記補正パラメータを取得する第2取得部と、前記2以上の第2画像データを取得する第3取得部と、前記補正パラメータに基づいて、前記2以上の第2画像データにおける前記画素変位量を前記実寸変位量に換算する換算部とを備える。
本開示の一態様に係る補正パラメータ算出方法等によれば、画像を用いた変位計測において、変位量を実寸値に換算するための補正パラメータを簡便に算出することができる。
(本開示に至った経緯)
画像を用いた変位計測において、当該画像から画像上における変位量(画素数)は計測することができるが、変位の実寸値は計測することができない。そこで、カメラから対象物までの距離を取得し、取得した距離を用いて、画像上の変位量を実寸値に変換することが行われている。例えば、特許文献1に記載の撮像装置では、対象物までの距離を計測する距離計測装置を有する構成が開示されている。そのため、計測現場においては、カメラ及び距離計測装置の2台を設置する必要がある。さらに、対象物の変位を精度よく計測するためには、カメラの光軸と距離計測装置の光軸とが平行となるようにカメラと距離計測装置とを設置することが必要となる。
画像を用いた変位計測において、当該画像から画像上における変位量(画素数)は計測することができるが、変位の実寸値は計測することができない。そこで、カメラから対象物までの距離を取得し、取得した距離を用いて、画像上の変位量を実寸値に変換することが行われている。例えば、特許文献1に記載の撮像装置では、対象物までの距離を計測する距離計測装置を有する構成が開示されている。そのため、計測現場においては、カメラ及び距離計測装置の2台を設置する必要がある。さらに、対象物の変位を精度よく計測するためには、カメラの光軸と距離計測装置の光軸とが平行となるようにカメラと距離計測装置とを設置することが必要となる。
また、変位の実寸値を計測する他の方法として、変位計測を行う対象物において長さが既知である特定部分を含む画像を撮像し、当該特定部分を表示する画像上の変位量と、既知の長さとに基づいて、1画素を実寸値に換算するための補正値を算出する方法がある。しかしながら、この方法では、特定部分の長さを予め取得することが必要となる。また、特定部分の長さがわからない場合、変位の実寸値の計測が行えない。
上記のように、従来の方法では、距離を計測するための距離計測装置を用意する必要がある、又は、特定部分の距離を予め取得しておく必要があるので、対象物の変位の実寸値を簡便に計測することができなかった。
そこで、発明者らは、画像を用いた変位計測において、簡便に変位量を実寸値に換算することができる補正パラメータ算出方法等について鋭意検討を行い、以下に説明する補正パラメータ算出方法等を創案した。
本開示の一態様に係る補正パラメータ算出方法は、画像を用いて対象物の動きを示す変位の実寸値である実寸変位量を計測するための補正パラメータを算出する補正パラメータ算出方法であって、特定の座標を検出可能なマーカが取り付けられた前記対象物を撮像して得られる第1画像データを撮像装置から取得する第1取得ステップと、前記第1画像データに含まれる前記マーカに基づいて、前記特定の座標を検出する検出ステップと、前記特定の座標の検出結果と、前記撮像装置のパラメータとに基づいて、前記撮像装置の位置を推定する推定ステップと、前記特定の座標と前記撮像装置の位置とに基づいて、前記撮像装置から前記対象物までの距離データを算出する距離算出ステップと、前記撮像装置が互いに異なるタイミングで撮像した2以上の第2画像データにおける前記対象物の計測点の画素変位量を実寸変位量に換算するための前記補正パラメータを、前記距離データを用いて算出するパラメータ算出ステップとを含む。
これにより、補正パラメータ算出方法を用いることで、撮像装置によりマーカを含む対象物を撮像するだけで、変位量を実寸値に換算するための補正パラメータを算出することができる。例えば、対象物までの距離を計測する距離計測装置を使用することなく、又は、対象物の特定部分の長さを予め取得することなく、補正パラメータを算出することができる。よって、補正パラメータ算出方法によれば、画像を用いた変位計測において、変位量を実寸値に換算するための補正パラメータを簡便に算出することができる。
また、例えば、さらに、前記対象物の前記変位の方向を示す変位方向情報を取得する第2取得ステップを含み、前記パラメータ算出ステップでは、さらに、前記変位方向情報を用いて前記補正パラメータを算出する。
これにより、補正パラメータ算出方法によれば、変位方向情報を用いることで、2次元空間(撮像装置の投影面)における画素変位量を、3次元空間における実寸変位量に換算することができる補正値を算出することができる。よって、補正パラメータ算出方法によれば、変位の実寸値をより精度よく計測することができる。
また、例えば、前記マーカは、前記対象物の平面部分に取り付けられており、前記変位方向情報が示す方向は、前記平面に対して定義される。
これにより、撮像装置と対象物との位置関係に関わらず、変位方向を正確に取得することができる。
また、例えば、前記マーカは、QRコード(登録商標)であり、前記変位方向情報は、前記QRコードに記憶されている。
これにより、補正パラメータ算出方法によれば、QRコードに記憶されている変位方向情報を取得するだけで、変位の実寸値をより精度よく計測することができる。よって、補正パラメータ算出方法によれば、精度よく変位の実寸値を算出することができる補正パラメータを、より簡便に算出することができる。
本開示の一態様に係る変位量算出方法は、上記の補正パラメータ算出方法を用いて算出された前記補正パラメータを取得する第3取得ステップと、前記2以上の第2画像データを取得する第4取得ステップと、前記補正パラメータに基づいて、前記2以上の第2画像データにおける前記画素変位量を前記実寸変位量に換算する換算ステップとを含む。
これにより、上記の補正パラメータ算出方法により算出された補正パラメータを用いて実寸変位量を計測することができるので対象物の実寸変位量を簡便に計測することができる。
本開示の一態様に係る補正パラメータ算出装置は、画像を用いて対象物の動きを示す変位の実寸値である実寸変位量を計測するための補正パラメータを算出する補正パラメータ算出装置であって、特定の座標を検出可能なマーカが取り付けられた前記対象物を撮像して得られる第1画像データを撮像装置から取得する第1取得部と、前記第1画像データに含まれる前記マーカに基づいて、前記特定の座標を検出する位置検出部と、前記特定の座標の検出結果と、前記撮像装置のパラメータとに基づいて、前記撮像装置の位置を推定する位置推定部と、前記特定の座標と前記撮像装置の位置とに基づいて、前記撮像装置から前記対象物までの距離データを算出する距離算出部と、前記撮像装置が互いに異なるタイミングで撮像した2以上の第2画像データに基づく前記対象物の計測点の画素変位量を実寸変位量に換算するための前記補正パラメータを、前記距離データを用いて算出するパラメータ算出部とを備える。
これにより、上記の補正パラメータ算出方法と同様の効果を奏する。
本開示の一態様に係る変位量算出装置は、請求項6に記載の補正パラメータ算出装置を用いて算出された前記補正パラメータを取得する第2取得部と、前記2以上の第2画像データを取得する第3取得部と、前記補正パラメータに基づいて、前記2以上の第2画像データにおける前記画素変位量を前記実寸変位量に換算する換算部とを備える。
これにより、上記の変位量算出方法と同様の効果を奏する。
なお、これらの全般的または具体的な態様は、システム、方法、集積回路、コンピュータプログラムまたはコンピュータで読み取り可能なCD-ROM等の非一時的記録媒体で実現されてもよく、システム、方法、集積回路、コンピュータプログラムまたは記録媒体の任意な組み合わせで実現されてもよい。プログラムは、記録媒体に予め記憶されていてもよいし、インターネット等を含む広域通信網を介して記録媒体に供給されてもよい。
以下、実施の形態について、図面を参照しながら具体的に説明する。
なお、以下で説明する実施の形態及び変形例は、いずれも包括的又は具体的な例を示すものである。以下の実施の形態及び変形例で示される数値、形状、材料、構成要素、構成要素の配置位置及び接続形態、ステップ、ステップの順序などは、一例であり、本開示を限定する主旨ではない。また、以下の実施の形態における構成要素のうち、独立請求項に記載されていない構成要素については、任意の構成要素として説明される。
なお、各図は模式図であり、必ずしも厳密に図示されたものではない。また、各図において、実質的に同一の構成に対しては同一の符号を付し、重複する説明は省略または簡略化される場合がある。
また、本明細書において、直交、等しいなどの要素間の関係性を示す用語、及び、数値は、厳格な意味のみを表す表現ではなく、実質的に同等な範囲、例えば数%程度の差異をも含むことを意味する表現である。
また、以下の明細書において、画像は、静止画像であるが動画像であってもよい。
(実施の形態)
以下、本実施の形態に係る補正パラメータ算出方法等について、図1~図6を参照しながら説明する。
以下、本実施の形態に係る補正パラメータ算出方法等について、図1~図6を参照しながら説明する。
[1.変位計測システムの構成]
まずは、本実施の形態に係る補正パラメータ算出方法を実行する補正パラメータ算出部110を備える変位計測システム1について、図1及び図2を参照しながら説明する。図1は、本実施の形態に係る変位計測システム1の概略構成を示す図である。図2は、本実施の形態に係る変位計測システム1の機能構成を示すブロック図である。
まずは、本実施の形態に係る補正パラメータ算出方法を実行する補正パラメータ算出部110を備える変位計測システム1について、図1及び図2を参照しながら説明する。図1は、本実施の形態に係る変位計測システム1の概略構成を示す図である。図2は、本実施の形態に係る変位計測システム1の機能構成を示すブロック図である。
図1に示すように、本実施の形態に係る変位計測システム1は、1つの撮像装置を用いて、対象物50の変位の実寸値を計測する情報処理システムである。対象物50は、変位を計測する対象であり、例えば、モータなどの動作時に変位(振動など)する機器であるがこれに限定されず、例えば、インフラ構造物などの外部からの応力により変位(変形など)する構造物であってもよい。インフラ構造物は、例えば、自動車又は鉄道などの車両が走行する橋梁であってもよい。なお、本明細書における変位には、対象物50の振動はもとより、対象物50の変形及び位置の変化も含まれる。変位は、対象物の動きを示すとも言える。
また、本願の対象物50の表面には、1以上のマーカ60が取り付けられている(固定されている)。マーカ60は、サイズが既知であり、かつ、例えば、4つ以上の座標を検出できるものであれば特に限定されないが、例えば、QR(Quick Response)コード(登録商標)、ARマーカ、チェスマーカなどであってもよい。以下では、マーカ60は、QRコードである例について説明する。なお、4つ以上の座標の各々は、特定の座標の一例である。
図1及び図2に示すように、変位計測システム1は、撮像装置10と、変位計測装置20と、出力装置30と、入力装置40とを備える。
撮像装置10は、対象物50の変位を計測するための画像を撮像する。撮像装置10が撮像する画像は、対象物50の変位に対する画像上の変位量(画素数)を検出するために用いられる。なお、以下において、対象物50の変位に対する画像上の変位量を画素変位量とも記載する。また、画像は、後述する補正値を算出するために用いられてもよい。
撮像装置10は、少なくとも1つのマーカ60が写るように撮像する。撮像装置10は、例えば、少なくとも1つのマーカ60が写る位置に配置される。
撮像装置10は、例えば、モノクロカメラである。言い換えると、画像は、例えば、モノクロ画像である。なお、撮像装置10は、モノクロカメラであることに限定されず、カラーカメラであってもよい。撮像装置10は、例えば、イメージセンサを有するデジタルビデオカメラ又はデジタルスチルカメラである。なお、撮像装置10は、取得装置の一例である。
変位計測装置20は、撮像装置10から取得した画像データに基づいて、画像上の画素変位量を対象物50の変位の実寸値を示す実寸変位量に換算するための補正値を算出し、算出した補正値を用いて、対象物50の実寸変位量を出力する情報処理装置である。変位計測装置20は、例えば、サーバ装置であってもよい。変位計測装置20は、補正パラメータ算出部110と、変位検出部120と、変位量算出部130とを有する。
補正パラメータ算出部110は、撮像装置10から取得した画像データに基づいて、画素変位量を実寸変位量に換算するための補正値を算出する。補正パラメータ算出部110は、取得部111と、位置検出部112と、位置推定部113と、距離算出部114と、補正値算出部115とを有する。
取得部111は、撮像装置10から画像を示す画像データを取得する。取得部111は、無線通信又は有線通信を介して撮像装置10と通信可能に接続される通信インターフェース(通信回路)を含んで構成される。取得部111は、第1取得部の一例である。
位置検出部112は、画像データから、マーカ60を検出し、検出したマーカ60に基づいて、特定の座標を検出する。位置検出部112は、マーカ60に基づいて、複数の特定の座標(例えば、4つ以上の座標)を検出する。特定の座標は、撮像装置10の位置を推定するために用いられる。撮像装置10の位置の推定精度を向上させる観点から、特定の座標は4つ以上設けられるとよい。また、座標は、3次元座標である。
そして、位置推定部113は、画像データ、特定の座標を示す座標情報及び撮像装置10の内部パラメータに基づいて、撮像装置10の位置を推定する。なお、撮像装置10の内部パラメータは、既知であるとする。また、内部パラメータは、例えば、3行×3列のパラメータ行列(cameraMatrix)、レンズの歪係数(distCoeffs)、焦点距離などの少なくとも1つを含む。
距離算出部114は、特定の座標と、撮像装置10の位置を示す位置情報とに基づいて、撮像装置10から対象物50までの距離を示す距離情報(距離データ)を算出する。距離算出部114は、例えば、撮像装置10から対象物50の1以上の計測点の各々までの距離を算出する。距離算出部114は、例えば、対象物50における変位を計測する1以上の計測点を含む複数の表面点までの距離を算出してもよい。そして、距離算出部114は、撮像装置10から対象物50までの距離を配列した距離マップを生成してもよい。なお、対象物50の計測点の数は、特に限定されず、2以上であってもよい。
補正値算出部115は、撮像装置10の位置、撮像装置10から対象物50までの距離、及び、撮像装置10の内部パラメータに基づいて、画素変位量を実寸変位量に換算するための補正値を算出する。補正値算出部115による補正値の算出については、後述する。また、補正値算出部115は、例えば、複数の表面点の各々において、補正値を算出し、算出した補正値を配列した補正値マップを生成してもよい。なお、補正値及び補正値マップは、補正パラメータの一例である。また、補正値算出部115は、パラメータ算出部の一例である。
なお、補正パラメータ算出部110は、変位計測装置20に内蔵されている例について説明したが、これに限定されない。補正パラメータ算出部110は、単独の装置として実現されてもよい。この場合は、補正パラメータ算出部110は、補正パラメータ算出装置として機能する。
なお、変位計測装置20は、変位量算出装置の一例である。
変位検出部120は、撮像装置10が撮像した2以上の画像データに基づいて、対象物50の変位に対応する画像上の画素変位量(画素数)を検出する。変位検出部120は、例えば、計測点ごとに画素変位量を検出する。
変位量算出部130は、画素変位量と、補正パラメータを示す補正情報とに基づいて、画素変位量を実寸変位量に換算することで、対象物50の実寸変位量を算出する。変位量算出部130は、例えば、対象物50の複数の計測点の各々の補正値と、当該複数の計測点の各々の画素変位量とに基づいて、当該複数の計測点の各々の実寸変位量を算出する。
出力装置30は、変位計測装置20から実寸変位量を含む提示情報を取得し、取得した提示情報を出力する装置である。出力装置30は、例えば、提示情報を画像として表示する表示装置である。出力装置30は、液晶ディスプレイ等である。出力装置30が出力した画像は作業員によって視認される。
出力装置30は、据え置き型の装置であってもよいし、作業員が所持する携帯端末が有する装置であってもよい。携帯端末は、出力装置30を有し、かつ、変位計測装置20と通信可能であれば特に限定されず、例えば、スマートフォン、タブレットなどであってもよい。携帯端末が出力装置30を有する場合、作業員は、対象物50の周辺において、携帯端末の出力装置30を確認することで、実寸変位量を知ることができる。なお、作業員は、ユーザの一例である。
変位計測システム1は、表示装置とともに、又は、表示装置に替えて、音を出力する装置を出力装置30として備えていてもよい。また、変位計測システム1は、プロジェクタなどの対象物(例えば、スクリーン)に提示情報を表示する装置を出力装置30として備えていてもよい。また、変位計測装置20が遠隔地に配置されている場合、変位計測装置20と出力装置30とは、ネットワークを介して接続されていてもよい。
入力装置40は、作業員から変位の計測における所定の情報を受け付けるユーザインタフェースである。入力装置40は、例えば、作業員から補正値を算出するための情報を受け付けてもよいし、対象物50の変位方向に関する情報を受け付けてもよいし、撮像装置10の略位置に関する情報を受け付けてもよい。また、入力装置40は、音声により所定の情報の入力を受け付けてもよい。なお、略位置は、撮像装置10の設置位置の推定値である。
入力装置40は、ハードウェアキー(ハードウェアボタン)、スライドスイッチ、タッチパネルなどにより実現される。入力装置40は、据え置き型の装置であってもよいし、作業員が所持する携帯端末が有する装置であってもよい。
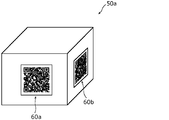
ここで、対象物50に取り付けられるマーカ60について、図3を参照しながら説明する。図3は、本実施の形態に係る対象物50aに貼り付けられているマーカ60の一例を示す図である。マーカ60は、例えば、QRコードであり、対象物50aの表面に貼り付けられている。なお、図3では、便宜上、対象物50aが直方体である例について説明する。
図3に示すように、対象物50aには、1以上のマーカ60a、60bが貼り付けられる。例えば、マーカ60a、60bは、対象物50aを構成する複数の面のうち、互いに異なる面に貼り付けられている。マーカ60a、60bは、撮像装置10から撮像可能な位置に貼り付けられる。また、マーカ60a、60bは、例えば、対象物50aにおける平面部分に貼り付けられるとよい。
マーカ60a及び60bがQRコードである場合、当該QRコードには特に情報が記憶されていなくてもよいし、変位の許容値に関する情報などが記憶されていてもよい。
マーカ60a、60bは、例えば4つ以上の位置(検出点)の座標(3次元座標)が取得できるように構成される。
なお、マーカ60a、60bは、3次元空間上の座標を検出することができれば、対象物50aの曲面部分などに貼り付けられていてもよい。また、マーカ60a、60bは、1つの平面に複数貼り付けられていてもよい。また、マーカ60a、60bのそれぞれは、対象物50aの計測点に対応して設けられてもよい。例えば、対象物50aにおける変位の計測点が複数ある場合、マーカ60a、60bは複数の計測点のそれぞれの周囲に貼り付けられていてもよい。
マーカ60a、60bの形状は、四角形(例えば、正方形)であるが、これに限定されず、例えば、五角形以上の多角形(例えば、正多角形)であってもよい。
[2.変位計測システムの動作]
次に、変位計測システム1の動作について、図4~図6を参照しながら説明する。図4は、本実施の形態に係る変位計測システム1の動作を示すフローチャートである。具体的には、図4は、変位計測装置20の動作を示すフローチャートである。また、図4に示すステップS11~ステップS15は、補正パラメータ算出部110の動作を示す。
次に、変位計測システム1の動作について、図4~図6を参照しながら説明する。図4は、本実施の形態に係る変位計測システム1の動作を示すフローチャートである。具体的には、図4は、変位計測装置20の動作を示すフローチャートである。また、図4に示すステップS11~ステップS15は、補正パラメータ算出部110の動作を示す。
図4に示すように、取得部111は、撮像装置10から画像を示す画像データを取得する(S11)。画像は、マーカ60を含む。なお、取得部111は、補正値を算出するためには、ステップS11において、少なくとも1枚の画像データを取得すればよい。また、取得部111は、変位を計測するためには、ステップS11において、互いに異なるタイミングで撮像された2以上の画像データを取得すればよい。
取得部111は、複数の画像データを取得した場合、少なくとも1枚の画像データを位置検出部112に出力し、かつ、2以上の画像データを変位検出部120に出力する。取得部111は、位置検出部112及び変位検出部120に互いに異なる画像データを出力してもよいし、少なくとも一部が同じ画像データを出力してもよい。位置検出部112に出力される少なくとも1枚の画像データは、第1画像データの一例であり、変位検出部120に出力される2以上の画像データは、第2画像データの一例である。また、ステップS11は、第1取得ステップの一例である。また、ステップS11は、後述する変位量算出方法における第4取得ステップの一例であってもよい。また、取得部111は、2以上の第2画像データを取得する第3取得部として機能してもよい。なお、第1画像データ及び第2画像データのそれぞれは、カメラパラメータなどが同じ条件で撮像された画像を示す画像データである。
次に、位置検出部112は、マーカ60を含む画像データからマーカ60を検出し、検出したマーカ60に基づいて、特定の座標を検出する(S12)。位置検出部112は、例えば、QRコードであるマーカ60の4隅を検出し、当該4隅の座標を検出する。このように、位置検出部112は、ステップS12において、複数の座標を検出する。位置検出部112は、マーカ60に基づいて、複数の座標を設定するとも言える。
なお、QRコードの読み込みが行われる場合、当該QRコードの位置、外形等の検出のために、4隅にある四角形(切りだしシンボル)の検出が行われる。そのような自動検出される位置を特定の座標を検出する位置とすることで、特定の座標を検出する位置を決定する処理を省くことができる。
位置検出部112による座標の設定について、図5を参照しながら説明する。図5は、本実施の形態に係る位置検出部112の検出結果を説明するための図である。図5の紙面上の左右方向をx軸方向、上下方向をy軸方向、紙面に対する垂直方向をz軸方向とすると、以下で示す3次元座標(x、y、z)の「x」はx軸上の位置を示しており、「y」はy軸上の位置を示しており、[z]はz軸上の位置を示している。なお、x軸方向、y軸方向、及び、z軸方向は、互いに直交する方向である。
図5に示すように、位置検出部112は、マーカ60の4隅の検出点Q1~Q4を検出し、検出した検出点Q1~Q4の各々に座標を設定する。位置検出部112は検出点Q1~Q4の位置関係に基づいて座標を設定する。位置検出部112は、例えば、検出点Q1~Q4間の距離(例えば、検出点Q1及びQ2の間の距離)に基づいて、座標を設定する。なお、検出点Q1~Q4は、例えば、正方形であるQRコードの4隅の部分であってもよい。本実施の形態では、検出点Q1及びQ2の第1距離、検出点Q2及びQ4の第2距離、検出点Q4及びQ3の第3距離、並びに、検出点Q3及びQ1の第4距離は、互いに等しいが、これに限定されない。
位置検出部112は、検出点Q1の座標を(0、0、0)に設定すると、当該座標を基準に、他の検出点の座標を検出点Q1からの位置(距離)に応じて設定する。位置検出部112は、第1距離~第4距離のそれぞれが等しいので、検出点Q2の座標を(1、0、0)に設定し、検出点Q3の座標を(0、1、0)に設定し、検出点Q4の座標を(1、1、0)に設定する。なお、検出点Q1及びQ2は図5に示す位置であり、かつ、検出点Q3が検出点Q1の下方の位置であって、第4距離の2倍の距離の位置である場合、位置検出部112は、当該検出点Q3の座標を(0、2、0)に設定する。このように、位置検出部112は、距離の比(例えば、実寸値の比)に応じて、各検出点の座標を設定する。位置検出部112は、例えば、画像上における検出点間の距離(画素数)に応じて、各検出点の座標を設定してもよい。
位置検出部112は、特定の座標を示す座標情報を位置推定部113に出力する。なお、ステップS12は、検出ステップの一例である。また、座標情報は、検出結果の一例である。
次に、位置推定部113は、画像データ(画像データ上での位置)、座標情報及び撮像装置10の内部パラメータに基づいて、撮像装置10の位置を推定する(S13)。位置推定部113は、対象物50の3次元位置(ここでは、マーカ60の3次元位置)及び撮像装置10の内部パラメータが既知である場合、PnP問題(Perspective-n-Point Problem)を解くことで撮像装置10の位置が推定可能である。本実施の形態では、検出点が4つ(n=4)であるので、位置推定部113は、P4P問題を解くことで、撮像装置10の位置を推定する。ここでの撮像装置10の位置は、例えば、検出点Q1を原点としたときの、3次元座標として表される。
位置推定部113は、PnP問題を解くことで、さらに、撮像装置10の姿勢を推定してもよい。
位置推定部113は、推定した撮像装置10の位置を示す位置情報を距離算出部114に出力する。なお、ステップS13は、推定ステップの一例である。
距離算出部114は、座標情報と位置情報とに基づいて、撮像装置10から対象物50までの距離を算出する(S14)。距離算出部114は、位置情報に含まれる撮像装置10の位置(座標)と、当該座標における距離「1」に対応する実寸の長さとに基づいて、撮像装置10から対象物50までの距離を算出する。これにより、撮像装置10から見たときの対象物50の位置が取得される。例えば、撮像装置10から見たときの対象物50の各計測点までの距離が取得される。座標上の距離「1」に対応する実寸の長さは、補正パラメータ算出部110が予め記憶していてもよいし、入力装置40を介して取得されてもよいし、マーカ60がQRコードである場合、当該QRコードに記憶されていてもよい。距離算出部114は、撮像装置10と対象物50との距離を示す距離情報を補正値算出部115に出力する。なお、ステップS14は、距離算出ステップの一例である。
補正値算出部115は、撮像装置10の位置、距離情報、及び、撮像装置10の内部パラメータに基づいて、画素変位量を実寸変位量に換算するための補正値を算出する(S15)。補正値算出部115は、画像データに含まれるマーカ60が1つである場合、例えば、対象物50に対して1つの補正値を算出する。補正値は、例えば、計測点における1画素に対応する実寸値を示す情報を含む。ステップS15は、パラメータ算出ステップの一例である。また、ステップS15は、第3取得ステップの一例であってもよい。
なお、補正パラメータ算出部110は、複数のマーカ60が写っている画像データを取得した場合、当該複数のマーカ60のそれぞれに補正値を算出してもよい。複数のマーカ60のそれぞれが対象物50の平面であって、かつ、撮像装置10までの距離が互いに異なる平面に取り付けられている場合、当該平面のそれぞれに補正値を算出することができるので、変位の実寸値を精度よく計測することが可能となる。
ここで、補正値算出部115の処理について、図6を参照しながら説明する。図6は、本実施の形態に係る変位の実寸換算方法を説明するための図である。なお、図6では、対象物50は、撮像装置10の投影面(撮像面)と平行な方向に変位している例を示している。図6に示す撮像装置10の位置T(Tx、Ty、Tz)は、撮像装置10のレンズ11の位置を示す、光学中心Oは、撮像装置10のレンズ11の中心を示し、位置P1(x、y)は、対象物50の第1時点における計測点の位置M1(X、Y、Z)に対応する撮像面上の位置を示し、画像上の変位(Δx1、Δy1)は、第1時点とは異なる第2時点における当該計測点の位置M2に対応する撮像面上の位置P2と位置P1との差を示す。変位(Δx1、Δy1)は、画像上の画素数である。
図6に示すように、三角形△OP1P2と三角形△OM1M2とは相似の関係にあり、補正値算出部115は、例えば、当該相似の関係を用いて、画素変位量を実寸変位量に換算するための補正値を算出する。撮像装置10の投影面における画像中心(cx、cy)と光学中心Oとの距離を焦点距離fとすると、光学中心Oと位置P1までの距離L1は、
L1=√(f2+x2+y2) (式1)
により算出される。第1時点は、例えば、対象物50が変位していない初期の時点である。
L1=√(f2+x2+y2) (式1)
により算出される。第1時点は、例えば、対象物50が変位していない初期の時点である。
また、実寸変位量を変位(Dx1、Dy1)とすると、三角形△OP1P2と三角形△OM1M2との相似の関係から、光学中心Oと位置M1までの距離L2について、
L2:L1=Dy1:Δy1=Dx1:Δx1 (式2)
が成り立つ。(式2)から、距離L2、つまり、光学中心Oから位置M1までの距離がわかれば、実寸変位量である変位(Dx1、Dy1)を算出できることがわかる。距離算出部114は、計測点ごとに距離L2が異なり得るので、計測点ごとに距離L2を算出する。
L2:L1=Dy1:Δy1=Dx1:Δx1 (式2)
が成り立つ。(式2)から、距離L2、つまり、光学中心Oから位置M1までの距離がわかれば、実寸変位量である変位(Dx1、Dy1)を算出できることがわかる。距離算出部114は、計測点ごとに距離L2が異なり得るので、計測点ごとに距離L2を算出する。
補正値算出部115は、上記の(式2)に基づいて、補正値を算出する。(式2)より、変位Dx1を算出するための補正値は、L2/L1である。また、(式2)より、変位Dy1を算出するための補正値も、L2/L1である。
なお、画像中心(cx、cy)、及び、焦点距離fは、撮像装置10の内部パラメータとして取得される。補正値算出部115は、チャート画像を用いて撮像装置10の内部パラメータを算出してもよい。
補正値算出部115は、算出した補正値を示す補正情報を変位量算出部130に出力する。変位量算出部130は、補正値算出部115から補正情報を取得する。変位量算出部130は、補正パラメータを取得する第2取得部として機能する。
次に、変位検出部120は、画像データから対象物50の変位の当該画像データ上における画素変位量を算出する(S16)。変位検出部120は、例えば、撮像装置10の投影面に投影された対象物50の変位から画素変位量を算出する。変位検出部120は、例えば、対象物50の複数の計測点ごとに、当該計測点における変位が画像上の何画素であるかを算出する。変位検出部120は、算出した画素変位量を変位量算出部130に出力する。
変位量算出部130は、画素変位量と、補正値とに基づいて、実寸変位量を算出する(S17)。変位量算出部130は、対象物50の複数の計測点ごとに、当該計測点における画素変位量と補正値とを演算することで当該計測点における実寸変位量を算出する。このように、変位量算出部130は、補正情報に基づいて、2以上の第2画像データにおける画素変位量を実寸変位量に換算する換算部として機能する。
変位量算出部130は、算出した実寸変位量を含む提示情報を出力装置30に出力する(S18)。そして、出力装置30は、変位量算出部130から取得した提示情報を画像として表示する。なお、ステップS18は、換算ステップの一例である。
なお、図4に示すステップS11~ステップS15までの動作は、対象物50の実寸変位量を算出する処理を実行するごとに行われてもよいし、撮像装置10の設置位置、姿勢、及び、カメラパラメータ(内部パラメータを含む)の少なくとも1つが変更されるごとに行われてもよい。また、補正値算出部115は、算出した補正値を記憶部(図示しない)に記憶してもよい。そして、補正値算出部115は、対象物50の実寸変位量を算出する場合に、記憶部から補正値を読み出し、読み出した補正値を変位量算出部130に出力してもよい。つまり、補正値算出部115は、過去に算出した補正値を、現在の実寸変位量を算出するための補正値として用いてもよい。これにより、補正パラメータ算出部110の処理量を低減することができる。
上記のステップS11~ステップS15は、補正パラメータを算出する補正パラメータ算出方法において実行される処理である。また、上記のステップS16~ステップS18は、実寸変位量を算出する変位量算出方法において実行される処理である。なお、変位量算出方法は、ステップS11~ステップS15の処理を含んでいてもよい。
上記のように、本実施の形態に係る変位計測システム1は、撮像装置10と、補正パラメータ算出部110を有する変位計測装置20とを備える。補正パラメータ算出部110は、撮像装置10から取得した画像データに含まれるマーカ60に基づいて、撮像装置10の位置を推定し、当該位置に基づいて画素変位量を実寸変位量に換算するための補正値を算出する。
このように、変位計測システム1によれば、他の装置(例えば、距離計測装置)などを使用することなく、撮像装置10からマーカ60を含む画像データを取得するだけで、補正値を算出することができるので、補正パラメータを簡便に算出することができる。
また、変位計測装置20は、撮像装置10が撮像した2以上の画像データを用いて、対象物50の変位の実寸変位量を計測する。これにより、変位計測装置20は、対象物50の変位がレーザ距離計などを用いて計測できない程度の周期の振動であっても、実寸変位量を計測することができる。
(実施の形態の変形例)
以下、本変形例に係る補正パラメータ算出方法等について、図7~図9を参照しながら説明する。なお、以下の説明では、実施の形態との相違点を中心に説明し、実施の形態と同様の構成については同一の符号を付し、説明を省略又は簡略化する場合がある。本変形例に係る変位計測システムの構成は、実施の形態に係る変位計測システム1と同様であり、説明を省略する。
以下、本変形例に係る補正パラメータ算出方法等について、図7~図9を参照しながら説明する。なお、以下の説明では、実施の形態との相違点を中心に説明し、実施の形態と同様の構成については同一の符号を付し、説明を省略又は簡略化する場合がある。本変形例に係る変位計測システムの構成は、実施の形態に係る変位計測システム1と同様であり、説明を省略する。
本変形例に係る変位計測システム1は、対象物50の変位方向が撮像装置の投影面(撮像面)と水平な方向と異なる場合であっても、精度よく実寸変位量を算出することができる点に特徴を有する。図7は、本変形例に係る変位計測システム1の動作を示すフローチャートである。
図7に示すように、補正値算出部115は、対象物50の変位方向情報を取得する(S21)。補正値算出部115は、例えば、入力装置40を介して変位方向情報を取得してもよい。変位方向情報は、例えば、対象物50がモータである場合、モータの駆動部の駆動方向に基づいた変位方向を示す情報であってもよい。また、変位方向情報は、例えば、対象物50の変位方向が設計的に予測できる場合、予測された変位方向を示す情報であってもよい。また、変位方向情報は、例えば、対象物50が橋梁などであり、車両などから応力を受ける場合、当該応力を受ける方向(例えば、鉛直方向)を示す情報であってもよい。また、変位方向情報が示す変位方向は1つに限定されず、2つ以上(2方向以上)であってもよい。ステップS21は、第2取得ステップの一例である。
なお、変位方向情報は、入力装置40を介して取得されることに限定されない。変位方向情報は、画像データに基づいて取得されてもよい。マーカ60がQRコードである場合、当該QRコードに、対象物50の変位方向に関する情報が記憶されていてもよい。補正値算出部115は、画像データに含まれるQRコードに基づいて、対象物50の変位方向を取得してもよい。この場合、変位方向は、例えば、QRコードが貼り付けられている対象物50の面(平面)を基準とする方向である。
そして、補正値算出部115は、撮像装置10の位置、距離情報、撮像装置10の内部パラメータ、及び、変位方向情報に基づいて、画素変位量を実寸変位量に換算するための補正値を算出する(S22)。つまり、補正値算出部115は、実施の形態に加えて、変位方向情報を用いて補正値を算出する。なお、ステップS22は、パラメータ算出ステップの一例である。
ここで、変位方向情報を用いて変位補正を行うことについて、図8A及び図8Bを参照しながら説明する。図8Aは、本変形例に係る変位方向を考慮した変位補正を説明するための第1図である。また、図8Bは、本変形例に係る変位方向を考慮した変位補正を説明するための第2図である。図8A及び図8Bは、対象物50bを上方からみた俯瞰図である。また、対象物50bの形状は、便宜上、正方形としている。
図8A及び図8Bに示すように、対象物50bを上方からみた場合に、撮像装置10の投影面に対して、対象物50bの変位方向が当該投影面と平行ではないとき、投影面には対象物50bの変位のうち、当該投影面と平行な方向における変位のみが投影される。図8Aでは、変位方向は、紙面上の左上と右下とを結ぶ方向である。この場合、例えば、対象物50bの計測点の変位がD1であったとすると、投影面に投影された対象物50bの計測点の変位はD2となる。変位D2は、変位D1における投影面と平行な方向の成分となる。
また、図8Bでは、変位方向は、紙面上の左下と右上とを結ぶ方向である。この場合、例えば、対象物50bの計測点の変位がD3であったとすると、投影面に投影された対象物50bの計測点の変位はD4となる。変位D4は、変位D3における投影面と平行な方向の成分となる。例えば、変位D1の方向と、変位D3の方向とが互いに直交する方向であり、かつ、変位量が等しい場合、投影面上における変位D2及びD4の方向及び大きさは等しくなる。なお、変位D1及びD3は、実寸変位量であり、例えば、実寸値である。また、変位D2及びD4は、画素変位量であり、例えば、画素数である。
このように、実際の変位方向が異なる変位D1及びD3が、投影面上においては、同じ方向の変位として検出されることがある。これでは、投影面と水平な方向における変位については計測ができるが、投影面と垂直な方向における変位については計測ができない。
そこで、本変形例では、補正値算出部115は、上記でも説明したように、ステップS21で対象物50の変位方向情報を取得し、ステップS22で当該変位方向情報を用いて、画像データ上における対象物50の画素変位量を実寸変位量に換算するための補正値を算出する。ここでの補正値は、1画素に対応する実寸値、及び、変位方向を示す情報を含む。補正値は、例えば、1画素に対応する実寸値(Xa、Yb、Zc)を示す情報を含んでいてもよい。実寸値Xaは、投影面上で1画素ずれたときの、実空間の3次元直交座標系におけるx軸方向への変位の実寸値を示す。実寸値Xbは、投影面上で1画素ずれたときの、実空間の3次元直交座標系におけるy軸方向への変位の実寸値を示す。Xcは、投影面上で1画素ずれたときの、実空間の3次元直交座標系におけるz軸方向への変位の実寸値を示す。実寸値(Xa、Yb、Zc)は、補正パラメータの一例である。
ここで、補正値算出部115の処理について、図9を参照しながら説明する。図9は、本変形例に係る変位の実寸換算方法を説明するための図である。
図9に示すように、対象物50の第1時点における計測点の位置M1(X、Y、Z)に対応する投影面上の位置P1を(x、y)とすると、光学中心Oから位置P1までの距離L1は、(式1)により算出可能である。第1時点は、例えば、対象物50が変位していない初期の時点である。また、第1時点とは異なる第2時点における計測点の位置M3に対応する投影面上の位置P3と位置P1との差(変位)を(Δx2、Δy2)とすると、第1補正値は、(式2)により算出可能である。ここでの第1補正値は、撮像装置10の投影面と平行な方向における変位の実寸変位量を算出可能な値である。第1補正値は、例えば、画像上の変位(Δx2、Δy2)から、実寸値の変位(Dx2、Dy2、Dz2)のうち変位(Dx2、Dy2)を算出可能な値である。
補正値算出部115は、算出した第1補正値と、変位方向情報とに基づいて、当該第1補正値を3次元情報である第2補正値に換算する。補正値算出部115は、投影面上の変位を示す2次元情報である画素変位量を3次元情報である実寸変位量に換算するための第2補正値を算出する。補正値算出部115は、第1補正値と、撮像装置10の投影面及び変位方向のなす角度とに基づいて、第2補正値を算出してもよい。第2補正値は、例えば、画像上の変位(Δx2、Δy2)から実寸値の変位(Dx2、Dy2、Dz2)を算出可能な値である。なお、補正値算出部115が第2補正値を算出する方法は、上記に限定されない。
上記のように、本変形例に係る変位計測システム1の補正パラメータ算出部110は、さらに、対象物50の変位方向を示す変位方向情報を用いて、画素変位量を実寸変位量に変換するための補正値を算出する。
これにより、変位計測システム1は、対象物50を上方から見たときに、対象物50が撮像装置10の投影面と交差する方向に変位する場合に、変位方向情報を用いて補正値を算出することができるので、当該変位の実寸値を精度よく計測することができる。
(他の実施の形態)
以上、本開示の1つまたは複数の態様に係る補正パラメータ算出方法等について、実施の形態、及び、変形例(以降において、実施の形態等とも記載する)に基づいて説明したが、本開示は、この実施の形態等に限定されるものではない。本開示の趣旨を逸脱しない限り、当業者が思いつく各種変形を実施の形態等に施したものや、異なる実施の形態における構成要素を組み合わせて構築される形態も、本開示の1つまたは複数の態様の範囲内に含まれてもよい。
以上、本開示の1つまたは複数の態様に係る補正パラメータ算出方法等について、実施の形態、及び、変形例(以降において、実施の形態等とも記載する)に基づいて説明したが、本開示は、この実施の形態等に限定されるものではない。本開示の趣旨を逸脱しない限り、当業者が思いつく各種変形を実施の形態等に施したものや、異なる実施の形態における構成要素を組み合わせて構築される形態も、本開示の1つまたは複数の態様の範囲内に含まれてもよい。
例えば、上記実施の形態等では、撮像装置は、地面に固定されている例について説明したが、これに限定されない。撮像装置は、例えば、ドローンなどの飛行体に設けられた撮像装置であってもよい。
また、上記実施の形態等では、マーカは、QRコードなどであり、対象物に貼り付けられている例について説明したが、これに限定されない。マーカは、例えば、対象物の表面に設けられた模様、文字などであってもよい。また、マーカは、例えば、対象物の表面に設けられた凹凸などであってもよい。模様、文字、及び、凹凸などにおいて、所定の位置間の距離は、予め既知である。また、マーカは、サイズが既知であるシール、貼り紙などであってもよい。例えば、マーカは、数cm四方の無地のシールなどであってもよい。
また、上記実施の形態等において、取得部は通信部である例について説明したが、これに限定されない。取得部は、例えば、記録媒体が接続される接続部であってもよい。接続部は、例えば、USB(Universal Serial Bus)が接続されるUSB端子、SDカードが差し込まれるSDカードスロット、光ディスクが挿入される光学ドライブなどであってもよい。
また、フローチャートにおける各ステップが実行される順序は、本開示を具体的に説明するために例示するためのものであり、上記以外の順序であってもよい。また、上記ステップの一部が、他のステップと同時(並列)に実行されてもよい。
また、ブロック図における機能ブロックの分割は一例であり、複数の機能ブロックを一つの機能ブロックとして実現したり、一つの機能ブロックを複数に分割したり、一部の機能を他の機能ブロックに移してもよい。また、類似する機能を有する複数の機能ブロックの機能を単一のハードウェア又はソフトウェアが並列又は時分割に処理してもよい。
また、上記実施の形態等における補正パラメータ算出装置は、単一の装置で実現されてもよいし、互いに接続された複数の装置で実現されてもよい。補正パラメータ算出装置が複数の装置によって実現される場合、補正パラメータ算出装置が備える構成要素は、複数の装置にどのように振り分けられてもよい。
また、上記実施の形態等では、変位計測装置は、出力装置を有していない、つまり、変位計測装置と、出力装置とは、別体である例について説明したが、出力装置を有していてもよい。この場合には、出力装置は、変位計測装置の一部である出力部(例えば、表示部)として機能する。
また、上記実施の形態等における変位計測システムが備える装置間の通信方法については特に限定されるものではない。装置間では、無線通信が行われてもよいし、有線通信が行われてもよい。また、装置間では、無線通信および有線通信が組み合わされてもよい。
また、上記実施の形態等における算出装置が備える構成要素の一部または全部は、1個のシステムLSI(Large Scale Integration:大規模集積回路)から構成されているとしてもよい。
システムLSIは、複数の処理部を1個のチップ上に集積して製造された超多機能LSIであり、具体的には、マイクロプロセッサ、ROM(Read Only Memory)、RAM(Random Access Memory)などを含んで構成されるコンピュータシステムである。ROMには、コンピュータプログラムが記憶されている。マイクロプロセッサが、コンピュータプログラムに従って動作することにより、システムLSIは、その機能を達成する。
なお、ここでは、システムLSIとしたが、集積度の違いにより、IC、LSI、スーパーLSI、ウルトラLSIと呼称されることもある。また、集積回路化の手法はLSIに限るものではなく、専用回路または汎用プロセッサで実現してもよい。LSI製造後に、プログラムすることが可能なFPGA(Field Programmable Gate Array)、あるいはLSI内部の回路セルの接続や設定を再構成可能なリコンフィギュラブル・プロセッサを利用してもよい。
さらには、半導体技術の進歩または派生する別技術によりLSIに置き換わる集積回路化の技術が登場すれば、当然、その技術を用いて機能ブロックの集積化を行ってもよい。バイオ技術の適用等が可能性としてありえる。
また、上記各種処理の全部又は一部は、電子回路等のハードウェアにより実現されても、ソフトウェアを用いて実現されてもよい。なお、ソフトウェアによる処理は、変位計測装置に含まれるプロセッサがメモリに記憶されたプログラムを実行することにより実現されるものである。
また、本開示の一態様は、補正パラメータ算出方法及び変位量算出方法に含まれる特徴的な各ステップをコンピュータに実行させるコンピュータプログラムであってもよい。また、本開示の一態様は、そのようなプログラムが記録された、コンピュータ読み取り可能な非一時的な記録媒体であってもよい。例えば、そのようなプログラムを記録媒体に記録して頒布又は流通させてもよい。例えば、頒布されたプログラムを、他のプロセッサを有する装置にインストールして、そのプログラムをそのプロセッサに実行させることで、その装置に、上記各処理を行わせることが可能となる。
本開示は、画像を用いた対象物の変位計測において、変位の実寸値を計測する装置等に広く利用可能である。
1 変位計測システム
10 撮像装置
11 レンズ
20 変位計測装置
30 出力装置
40 入力装置
50、50a、50b 対象物
60、60a、60b マーカ
110 補正パラメータ算出部(補正パラメータ算出装置)
111 取得部(第1取得部)
112 位置検出部
113 位置推定部
114 距離算出部
115 補正値算出部(パラメータ算出部)
120 変位検出部
130 変位量算出部(換算部)
f 焦点距離
L1、L2 距離
M1~M3、P1~P3、T 位置
O 光学中心
Q1~Q4 検出点
10 撮像装置
11 レンズ
20 変位計測装置
30 出力装置
40 入力装置
50、50a、50b 対象物
60、60a、60b マーカ
110 補正パラメータ算出部(補正パラメータ算出装置)
111 取得部(第1取得部)
112 位置検出部
113 位置推定部
114 距離算出部
115 補正値算出部(パラメータ算出部)
120 変位検出部
130 変位量算出部(換算部)
f 焦点距離
L1、L2 距離
M1~M3、P1~P3、T 位置
O 光学中心
Q1~Q4 検出点
Claims (7)
- 画像を用いて対象物の動きを示す変位の実寸値である実寸変位量を計測するための補正パラメータを算出する補正パラメータ算出方法であって、
特定の座標を検出可能なマーカが取り付けられた前記対象物を撮像して得られる第1画像データを撮像装置から取得する第1取得ステップと、
前記第1画像データに含まれる前記マーカに基づいて、前記特定の座標を検出する検出ステップと、
前記特定の座標の検出結果と、前記撮像装置のパラメータとに基づいて、前記撮像装置の位置を推定する推定ステップと、
前記特定の座標と前記撮像装置の位置とに基づいて、前記撮像装置から前記対象物までの距離データを算出する距離算出ステップと、
前記撮像装置が互いに異なるタイミングで撮像した2以上の第2画像データにおける前記対象物の計測点の画素変位量を実寸変位量に換算するための前記補正パラメータを、前記距離データを用いて算出するパラメータ算出ステップとを含む
補正パラメータ算出方法。 - さらに、前記対象物の前記変位の方向を示す変位方向情報を取得する第2取得ステップを含み、
前記パラメータ算出ステップでは、さらに、前記変位方向情報を用いて前記補正パラメータを算出する
請求項1に記載の補正パラメータ算出方法。 - 前記マーカは、前記対象物の平面部分に取り付けられており、
前記変位方向情報が示す方向は、前記平面に対して定義される
請求項2に記載の補正パラメータ算出方法。 - 前記マーカは、QRコード(登録商標)であり、
前記変位方向情報は、前記QRコードに記憶されている
請求項2又は3に記載の補正パラメータ算出方法。 - 請求項1~4のいずれか1項に記載の補正パラメータ算出方法を用いて算出された前記補正パラメータを取得する第3取得ステップと、
前記2以上の第2画像データを取得する第4取得ステップと、
前記補正パラメータに基づいて、前記2以上の第2画像データにおける前記画素変位量を前記実寸変位量に換算する換算ステップとを含む
変位量算出方法。 - 画像を用いて対象物の動きを示す変位の実寸値である実寸変位量を計測するための補正パラメータを算出する補正パラメータ算出装置であって、
特定の座標を検出可能なマーカが取り付けられた前記対象物を撮像して得られる第1画像データを撮像装置から取得する第1取得部と、
前記第1画像データに含まれる前記マーカに基づいて、前記特定の座標を検出する位置検出部と、
前記特定の座標の検出結果と、前記撮像装置のパラメータとに基づいて、前記撮像装置の位置を推定する位置推定部と、
前記特定の座標と前記撮像装置の位置とに基づいて、前記撮像装置から前記対象物までの距離データを算出する距離算出部と、
前記撮像装置が互いに異なるタイミングで撮像した2以上の第2画像データに基づく前記対象物の計測点の画素変位量を実寸変位量に換算するための前記補正パラメータを、前記距離データを用いて算出するパラメータ算出部とを備える
補正パラメータ算出装置。 - 請求項6に記載の補正パラメータ算出装置を用いて算出された前記補正パラメータを取得する第2取得部と、
前記2以上の第2画像データを取得する第3取得部と、
前記補正パラメータに基づいて、前記2以上の第2画像データにおける前記画素変位量を前記実寸変位量に換算する換算部とを備える
変位量算出装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202080066802.6A CN114502913A (zh) | 2019-10-17 | 2020-06-26 | 修正参数计算方法及装置、位移量计算方法及装置 |
| JP2021552097A JPWO2021075090A1 (ja) | 2019-10-17 | 2020-06-26 | |
| US17/699,418 US11920913B2 (en) | 2019-10-17 | 2022-03-21 | Conversion parameter calculation method, displacement amount calculation method, conversion parameter calculation device, and displacement amount calculation device |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019-190126 | 2019-10-17 | ||
| JP2019190126 | 2019-10-17 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US17/699,418 Continuation US11920913B2 (en) | 2019-10-17 | 2022-03-21 | Conversion parameter calculation method, displacement amount calculation method, conversion parameter calculation device, and displacement amount calculation device |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2021075090A1 true WO2021075090A1 (ja) | 2021-04-22 |
Family
ID=75537583
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2020/025232 WO2021075090A1 (ja) | 2019-10-17 | 2020-06-26 | 補正パラメータ算出方法、変位量算出方法、補正パラメータ算出装置、及び、変位量算出装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US11920913B2 (ja) |
| JP (1) | JPWO2021075090A1 (ja) |
| CN (1) | CN114502913A (ja) |
| WO (1) | WO2021075090A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP4113053A1 (en) * | 2021-07-02 | 2023-01-04 | Realook & Company Co., Ltd. | Apparatus for correcting assembly deviation and process error thereof using sensing mark, and method of correcting assembly deviation and process error using same |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007296248A (ja) * | 2006-05-02 | 2007-11-15 | Sony Computer Entertainment Inc | ゲーム装置 |
| JP2013124972A (ja) * | 2011-12-15 | 2013-06-24 | Samsung Yokohama Research Institute Co Ltd | 位置推定装置及び方法、並びにテレビジョン受信機 |
| JP2015055969A (ja) * | 2013-09-11 | 2015-03-23 | 学校法人常翔学園 | 移動ロボット、移動ロボット制御システム、制御図形の表示されたシート、及びプログラム |
| JP2016071663A (ja) * | 2014-09-30 | 2016-05-09 | 株式会社Nttドコモ | 情報通信システムおよび情報読取方法 |
| JP2017215306A (ja) * | 2016-02-24 | 2017-12-07 | パナソニックIpマネジメント株式会社 | 変位検出装置および変位検出方法 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5281610B2 (ja) | 2010-05-14 | 2013-09-04 | 西日本旅客鉄道株式会社 | レーザー距離計付き撮影装置 |
| CN112859899A (zh) * | 2014-10-31 | 2021-05-28 | 深圳市大疆创新科技有限公司 | 用于利用视觉标记进行监视的系统和方法 |
| US10062176B2 (en) | 2016-02-24 | 2018-08-28 | Panasonic Intellectual Property Management Co., Ltd. | Displacement detecting apparatus and displacement detecting method |
| EP3438603A1 (en) * | 2016-03-29 | 2019-02-06 | KYB Corporation | Road surface displacement detection device and suspension control method |
| US11195294B2 (en) * | 2016-04-22 | 2021-12-07 | Nikon Corporation | Image measurement method, image measurement program, image measurement device, and object manufacture method |
| WO2018124188A1 (ja) | 2016-12-27 | 2018-07-05 | Coaido株式会社 | 測定装置およびプログラム |
| CN112119282A (zh) * | 2018-03-23 | 2020-12-22 | 索尼公司 | 信息处理装置、移动装置、方法和程序 |
-
2020
- 2020-06-26 CN CN202080066802.6A patent/CN114502913A/zh active Pending
- 2020-06-26 WO PCT/JP2020/025232 patent/WO2021075090A1/ja active Application Filing
- 2020-06-26 JP JP2021552097A patent/JPWO2021075090A1/ja active Pending
-
2022
- 2022-03-21 US US17/699,418 patent/US11920913B2/en active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007296248A (ja) * | 2006-05-02 | 2007-11-15 | Sony Computer Entertainment Inc | ゲーム装置 |
| JP2013124972A (ja) * | 2011-12-15 | 2013-06-24 | Samsung Yokohama Research Institute Co Ltd | 位置推定装置及び方法、並びにテレビジョン受信機 |
| JP2015055969A (ja) * | 2013-09-11 | 2015-03-23 | 学校法人常翔学園 | 移動ロボット、移動ロボット制御システム、制御図形の表示されたシート、及びプログラム |
| JP2016071663A (ja) * | 2014-09-30 | 2016-05-09 | 株式会社Nttドコモ | 情報通信システムおよび情報読取方法 |
| JP2017215306A (ja) * | 2016-02-24 | 2017-12-07 | パナソニックIpマネジメント株式会社 | 変位検出装置および変位検出方法 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP4113053A1 (en) * | 2021-07-02 | 2023-01-04 | Realook & Company Co., Ltd. | Apparatus for correcting assembly deviation and process error thereof using sensing mark, and method of correcting assembly deviation and process error using same |
Also Published As
| Publication number | Publication date |
|---|---|
| US20220205776A1 (en) | 2022-06-30 |
| JPWO2021075090A1 (ja) | 2021-04-22 |
| US11920913B2 (en) | 2024-03-05 |
| CN114502913A (zh) | 2022-05-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6330987B2 (ja) | 画像処理装置、画像処理方法、及び記憶媒体 | |
| CN108074267B (zh) | 交点检测装置及方法、摄像头校正系统及方法及记录介质 | |
| JP6486069B2 (ja) | 画像処理装置、検査装置、検査方法及び画像処理プログラム | |
| JP6594039B2 (ja) | 画像処理装置、方法及びプログラム | |
| JP6733267B2 (ja) | 情報処理プログラム、情報処理方法および情報処理装置 | |
| JP4250620B2 (ja) | 情報処理方法および装置 | |
| US20200177866A1 (en) | Calibration apparatus, chart for calibration, chart pattern generation apparatus, and calibration method | |
| KR102354299B1 (ko) | 단일 영상을 이용한 카메라 캘리브레이션 방법 및 이를 위한 장치 | |
| JP2014131257A (ja) | 画像補正システム、画像補正方法及びプログラム | |
| TWI622960B (zh) | 深度影像擷取裝置的校正方法 | |
| KR20160003776A (ko) | 자세 추정 방법 및 로봇 | |
| CN109920004B (zh) | 图像处理方法、装置、标定物组合、终端设备及标定系统 | |
| CN108074237B (zh) | 图像清晰度检测方法、装置、存储介质及电子设备 | |
| WO2014045508A1 (ja) | 検査装置、検査方法、および検査プログラム | |
| US20220215582A1 (en) | Conversion parameter calculation method, displacement amount calculation method, conversion parameter calculation device, and displacement amount calculation device | |
| CN110876053A (zh) | 图像处理装置、驾驶支援系统及记录介质 | |
| WO2021075090A1 (ja) | 補正パラメータ算出方法、変位量算出方法、補正パラメータ算出装置、及び、変位量算出装置 | |
| JP2011155412A (ja) | 投影システムおよび投影システムにおける歪み修正方法 | |
| WO2010013289A1 (ja) | カメラ校正画像作成装置およびカメラ校正画像作成プログラム | |
| JP6199000B2 (ja) | 情報処理装置 | |
| JP2018009927A (ja) | 画像処理装置、画像処理方法及びプログラム | |
| CN112292577B (zh) | 三维测量装置以及方法 | |
| JP6906177B2 (ja) | 交点検出装置、カメラ校正システム、交点検出方法、カメラ校正方法、プログラムおよび記録媒体 | |
| JP6779368B2 (ja) | 画像処理装置、画像処理方法、およびプログラム | |
| JP4351090B2 (ja) | 画像処理装置および画像処理方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 20875683 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2021552097 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 20875683 Country of ref document: EP Kind code of ref document: A1 |