WO2020183973A1 - 表示システム、表示方法、及び表示プログラム - Google Patents
表示システム、表示方法、及び表示プログラム Download PDFInfo
- Publication number
- WO2020183973A1 WO2020183973A1 PCT/JP2020/003868 JP2020003868W WO2020183973A1 WO 2020183973 A1 WO2020183973 A1 WO 2020183973A1 JP 2020003868 W JP2020003868 W JP 2020003868W WO 2020183973 A1 WO2020183973 A1 WO 2020183973A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- display
- causal relationship
- relationship model
- abnormality
- causal
- Prior art date
Links
- 238000000034 method Methods 0.000 title claims description 28
- 230000001364 causal effect Effects 0.000 claims abstract description 113
- 230000005856 abnormality Effects 0.000 claims abstract description 74
- 238000004519 manufacturing process Methods 0.000 claims abstract description 63
- 238000003860 storage Methods 0.000 claims abstract description 30
- 238000012544 monitoring process Methods 0.000 claims abstract description 26
- 238000010586 diagram Methods 0.000 claims description 55
- 230000015654 memory Effects 0.000 claims description 4
- 238000004806 packaging method and process Methods 0.000 description 53
- 230000007246 mechanism Effects 0.000 description 36
- 230000002159 abnormal effect Effects 0.000 description 26
- 229920006280 packaging film Polymers 0.000 description 24
- 239000012785 packaging film Substances 0.000 description 24
- 238000004458 analytical method Methods 0.000 description 23
- 230000032258 transport Effects 0.000 description 19
- 230000006870 function Effects 0.000 description 9
- 239000010985 leather Substances 0.000 description 7
- 230000008569 process Effects 0.000 description 7
- 238000012545 processing Methods 0.000 description 7
- 238000004891 communication Methods 0.000 description 6
- 230000008859 change Effects 0.000 description 5
- 238000010276 construction Methods 0.000 description 5
- 238000001514 detection method Methods 0.000 description 5
- 238000010438 heat treatment Methods 0.000 description 4
- 238000005259 measurement Methods 0.000 description 4
- 238000012986 modification Methods 0.000 description 4
- 230000004048 modification Effects 0.000 description 4
- 239000000835 fiber Substances 0.000 description 3
- 230000010365 information processing Effects 0.000 description 3
- 238000012546 transfer Methods 0.000 description 3
- 238000004804 winding Methods 0.000 description 3
- 238000007476 Maximum Likelihood Methods 0.000 description 2
- 230000001133 acceleration Effects 0.000 description 2
- 230000002950 deficient Effects 0.000 description 2
- 238000007789 sealing Methods 0.000 description 2
- 238000010845 search algorithm Methods 0.000 description 2
- 239000004698 Polyethylene Substances 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 230000004397 blinking Effects 0.000 description 1
- 238000004364 calculation method Methods 0.000 description 1
- 238000004040 coloring Methods 0.000 description 1
- 239000002131 composite material Substances 0.000 description 1
- 230000003111 delayed effect Effects 0.000 description 1
- 239000006185 dispersion Substances 0.000 description 1
- 238000011156 evaluation Methods 0.000 description 1
- 235000013305 food Nutrition 0.000 description 1
- 238000007689 inspection Methods 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 238000000465 moulding Methods 0.000 description 1
- 235000012149 noodles Nutrition 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 238000012858 packaging process Methods 0.000 description 1
- -1 polyethylene Polymers 0.000 description 1
- 229920000573 polyethylene Polymers 0.000 description 1
- 238000007639 printing Methods 0.000 description 1
- 238000003672 processing method Methods 0.000 description 1
- 239000011347 resin Substances 0.000 description 1
- 229920005989 resin Polymers 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 238000001228 spectrum Methods 0.000 description 1
- 239000000126 substance Substances 0.000 description 1
- 239000000758 substrate Substances 0.000 description 1
- 230000036962 time dependent Effects 0.000 description 1
- 238000012549 training Methods 0.000 description 1
- 238000011144 upstream manufacturing Methods 0.000 description 1
Images












Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B23/00—Testing or monitoring of control systems or parts thereof
- G05B23/02—Electric testing or monitoring
- G05B23/0205—Electric testing or monitoring by means of a monitoring system capable of detecting and responding to faults
- G05B23/0259—Electric testing or monitoring by means of a monitoring system capable of detecting and responding to faults characterized by the response to fault detection
- G05B23/0267—Fault communication, e.g. human machine interface [HMI]
- G05B23/0272—Presentation of monitored results, e.g. selection of status reports to be displayed; Filtering information to the user
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B23/00—Testing or monitoring of control systems or parts thereof
- G05B23/02—Electric testing or monitoring
- G05B23/0205—Electric testing or monitoring by means of a monitoring system capable of detecting and responding to faults
- G05B23/0259—Electric testing or monitoring by means of a monitoring system capable of detecting and responding to faults characterized by the response to fault detection
- G05B23/0275—Fault isolation and identification, e.g. classify fault; estimate cause or root of failure
- G05B23/0278—Qualitative, e.g. if-then rules; Fuzzy logic; Lookup tables; Symptomatic search; FMEA
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/10—Plc systems
- G05B2219/14—Plc safety
- G05B2219/14097—Display of error messages
Definitions
- the present invention relates to a display system, a display method, and a display program.
- Patent Document 1 proposes a method of dividing modes according to operating states based on an event signal, creating a normal model for each mode, and performing abnormality determination based on the created normal model. There is. In this method, the adequacy of the training data used to create the normal model is checked, and the threshold value used for abnormality judgment is set according to the result to prevent the occurrence of false alarms that judge normal as abnormal. ing.
- Patent Document 2 proposes a method for detecting an abnormality in a product produced by a production facility. Specifically, in Patent Document 2, the data collected from the production system is classified into a normal case and an abnormal case, and a feature amount that causes a significant difference between the normal case and the abnormal case is specified. Therefore, a method of diagnosing whether or not the product is normal based on the specified feature amount has been proposed.
- an abnormality occurs in a production facility, it must be resolved immediately, but the user investigates the cause of the abnormality by a manual or the like and then performs a process for solving the abnormality. Is common. However, if the manual is checked every time an abnormality occurs, it takes time and the processing may be delayed.
- the present invention has been made to solve this problem, and an object of the present invention is to provide a display system, a display method, and a display program capable of easily confirming the cause of an abnormality that may occur in a production facility. To do.
- the display system is a production facility for producing a product, and is provided in a production facility having at least one driving means for driving the production facility and at least one monitoring means for monitoring the production.
- the system includes a control unit, a display unit, a storage unit, and an input unit, and the storage unit includes schematic data representing a schematic diagram of the production equipment and at least one that can occur in the production equipment. At least one causal element of the abnormality is selected from the driving means and the monitoring means, and the causal relationship model data represented as a causal relationship model together with the relationship of the causal element is stored, and the control unit stores the causal element.
- the display unit is configured to display the schematic diagram and the causal relationship model so as to correspond to the schematic diagram.
- a schematic diagram of the production equipment and a causal relationship model related to an abnormality that may occur in the production equipment are displayed on the display unit.
- the causal relational model is superimposed and displayed on the display unit so as to correspond to the schematic diagram, the causal element included in the causal relational model can be specified while looking at the schematic diagram. Therefore, it is possible to easily visually recognize where the abnormality is occurring in the production equipment.
- the storage unit stores causal relationship model data related to a plurality of the abnormalities
- the input unit is configured to accept selection of one abnormality from the plurality of abnormalities.
- the control unit can be configured to display the causal relationship model corresponding to the selected abnormality on the display unit.
- the user since the causal relationship model data related to a plurality of abnormalities is stored, the user can select, for example, an actually occurring abnormality from the plurality of abnormalities by the input unit. Therefore, the causal relationship model can be easily confirmed for each abnormality that occurs.
- the driving means and the monitoring means have at least one controllable feature amount
- the control unit has the cause element of each abnormality and at least one said element corresponding to the cause element.
- the feature amount can be displayed on the display unit as a list.
- the causative element for each abnormality and the corresponding feature amount are displayed as a list on the display unit, so that the causative element for solving the abnormality and the feature amount for controlling the abnormality can be visually recognized. Can be done.
- the feature amount to be controlled may differ depending on the abnormality, so it is possible to easily know which feature amount should be controlled by looking at the list.
- the input unit accepts the selection of one of the causal elements from the list, and the control unit emphasizes the selected causal element in the causal relationship model displayed on the display unit. Can be configured to be displayed.
- the causal element in the causal relationship model displayed on the display unit can be emphasized and displayed. Therefore, for example, the user can easily visually recognize the position of the causative element selected on the schematic diagram.
- the display method according to the present invention is an abnormality that may occur in a production facility that produces a product and has at least one driving means for driving the production facility and at least one monitoring means for monitoring the production.
- a display method for displaying the causal relationship of the above on the display unit wherein the step of storing the schematic data representing the schematic diagram of the production equipment and the causative element of at least one abnormality in the production equipment are driven by the driving means. And the step of selecting at least one from the monitoring means and storing the causal relationship model data represented as the causal relationship model together with the relationship of the causal element, and the schematic diagram and the schematic diagram on the display unit.
- the step of displaying the causal relationship model so as to overlap is provided.
- the display program according to the present invention is an abnormality that may occur in a production facility that produces a product and has at least one driving means for driving the production facility and at least one monitoring means for monitoring the production.
- the step of displaying the causal relationship model so as to overlap with each other is executed so as to correspond to the schematic diagram.
- the cause of an abnormality that may occur in a production facility can be easily confirmed.
- FIG. 1 An example of a situation in which the present invention is applied is schematically illustrated. It is a block diagram which shows the hardware structure of the analysis apparatus which concerns on one Embodiment of this invention. It is the schematic of the production equipment which concerns on one Embodiment of this invention. It is a block diagram which shows the functional structure of an analyzer. It is a flowchart which shows an example of construction of a causal relational model. This is an example of the relationship between the control signal and the takt time. This is an example of a causal relationship model. This is an example of a causal relationship model. This is an example of a causal relationship model. It is the figure which superposed the node of the causal relation model on the schematic diagram of a packaging machine. This is an example of a screen of a display device. This is an example of a screen of a display device. This is an example of a screen of a display device.
- the present embodiment an embodiment according to one aspect of the present invention (hereinafter, also referred to as “the present embodiment”) will be described with reference to the drawings.
- the embodiments described below are merely examples of the present invention in all respects. Needless to say, various improvements and modifications can be made without departing from the scope of the present invention. That is, in carrying out the present invention, a specific configuration according to the embodiment may be appropriately adopted.
- the data appearing in the present embodiment are described in natural language, but more specifically, the data is specified in a pseudo language, commands, parameters, machine language, etc. that can be recognized by a computer.
- FIG. 1 schematically illustrates an example of an application scene of the production system according to the present embodiment.
- the production system according to the present embodiment includes a packaging machine 3, an analysis device 1, and a display device 2, which are examples of production equipment.
- the analysis device 1 is a computer configured to derive a causal relationship between a servomotor (driving means) and various sensors (monitoring means) provided in the packaging machine 3 and display the causal relationship.
- driving means such as a servomotor and monitoring means such as various sensors will be collectively referred to as a mechanism.
- the causative element according to the present invention corresponds to a mechanism that causes an abnormality among the mechanisms.
- the analysis device 1 generates a causal relationship model between the mechanisms for the abnormality that may occur in the packaging machine 3, and displays this on the screen 21 of the display device 2.
- a causal relationship model is shown when the wear of the leather belt for the brake of the film roll 30 (see FIG. 3) described later occurs as an abnormality. That is, among the plurality of servomotors provided in the packaging machine 3, servos 1, 3 and 4 are displayed as nodes, and these are connected by edges. And the direction of the edge shows a causal relationship. That is, it is shown that when the leather belt is worn, the servo 1 affects the servo 3 and the servo 3 affects the servo 4, resulting in the wear of the leather belt.
- each servomotor has a plurality of controllable feature amounts such as torque and position, and any of the feature amounts of the servomotor establishes the above causal relationship.
- a schematic view of the packaging machine 3 is displayed on the display device 2, and a causal relationship model is superimposed on the schematic diagram.
- each node of the causal relationship model is arranged at a position where each servomotor is provided in the schematic view of the packaging machine 3. Therefore, the operator can identify the mechanism that causes the abnormality while looking at the schematic diagram. Therefore, in the packaging machine 3, it is possible to easily visually recognize which mechanism should be confirmed to return the abnormality to normal.
- each mechanism does not have to be particularly limited, and may be appropriately selected depending on the embodiment.
- Each mechanism may be, for example, a conveyor, a robot arm, a servomotor, a cylinder (molding machine or the like), a suction pad, a cutter device, a sealing device, or the like.
- each mechanism may be a composite device such as a printing machine, a mounting machine, a reflow furnace, or a substrate inspection device.
- each mechanism includes, for example, a device that detects some information by various sensors, a device that acquires data from various sensors, and some device from the acquired data, in addition to the device that involves some physical operation as described above. It may include a device that performs internal processing such as a device that detects information and a device that processes acquired data.
- One mechanism may be composed of one or more devices, or may be composed of a part of the devices.
- One device may be configured by a plurality of mechanisms. Further, when the same device executes a plurality of processes, each may be regarded as a different mechanism. For example, when the same device executes the first process and the second process, the device that executes the first process is regarded as the first mechanism, and the device that executes the second process is the first. It may be regarded as the mechanism of 2.
- FIG. 2 is a block diagram showing an example of the hardware configuration of the analysis device 1 according to the present embodiment
- FIG. 3 is a diagram showing a schematic configuration of the packaging machine.
- the analysis device 1 is a computer to which the control unit 11, the storage unit 12, the communication interface 13, the external interface 14, the input device 15, and the drive 16 are electrically connected.
- the control unit 11 includes a CPU (Central Processing Unit), a RAM (Random Access Memory), a ROM (Read Only Memory), and the like, and controls each component according to information processing.
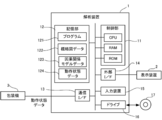
- the storage unit 12 is, for example, an auxiliary storage device such as a hard disk drive or a solid state drive, and stores a program 121 executed by the control unit 11, schematic diagram data 122, causal relationship model data 123, operation state data 124, and the like. To do.
- the program 121 is a program for generating a causal relationship model between an abnormality occurring in the packaging machine 3 and a mechanism, displaying the model on the display device 2, and the like.
- the schematic data 122 is data showing a schematic diagram of a target production facility, and in the present embodiment, is data showing a schematic diagram of the packaging machine 3.
- the schematic diagram may be at least a schematic diagram of the entire packaging machine so that the position of the mechanism shown in the causal relationship model can be understood, and is not necessarily a detailed diagram. Further, it may be an enlarged view showing only a part of the packaging machine 3.
- the causal relationship model data 123 is data showing a causal relationship model of abnormal occurrence constructed by the feature amount of each mechanism extracted from the packaging machine 3. That is, it is data showing a causal relationship between mechanisms when an abnormality occurs.
- the causal relationship model data is generated by the feature amount extracted from the packaging machine 3, but the causal relationship model data generated in advance in the external device can also be stored. ..
- the operating state data 124 is data indicating the operating state of the packaging machine 3. Details will be described later, but for example, it can be data that can occur in driving each mechanism described above, for example, measurement data such as torque, speed, acceleration, temperature, and pressure. Further, when the mechanism is a sensor, the detection result can be, for example, detection data indicating whether or not the content WA exists by "on” and "off".
- the communication interface 13 is, for example, a wired LAN (Local Area Network) module, a wireless LAN module, or the like, and is an interface for performing wired or wireless communication. That is, the communication interface 13 is an example of a communication unit configured to communicate with another device.
- the analysis device 1 of the present embodiment is connected to the packaging machine 3 via the communication interface 13.
- the external interface 14 is an interface for connecting to an external device, and is appropriately configured according to the external device to be connected.
- the external interface 14 is connected to the display device 2.
- the display device 2 a known liquid crystal display, touch panel display, or the like may be used.
- the input device 15 is, for example, a device for inputting a mouse, a keyboard, or the like.
- the drive 16 is, for example, a CD (CompactDisk) drive, a DVD (DigitalVersatileDisk) drive, or the like, and is a device for reading a program stored in the storage medium 17.
- the type of the drive 16 may be appropriately selected according to the type of the storage medium 17. At least a part of various data 122 to 125 including the program 121 stored in the storage unit may be stored in the storage medium 17.
- the storage medium 17 stores the information of the program or the like by electrical, magnetic, optical, mechanical or chemical action so that the information of the program or the like recorded by the computer or other device, the machine or the like can be read. It is a medium to do.
- a disc-type storage medium such as a CD or DVD is illustrated.
- the type of the storage medium 17 is not limited to the disc type, and may be other than the disc type. Examples of storage media other than the disk type include semiconductor memories such as flash memories.
- the components can be omitted, replaced, or added as appropriate according to the embodiment.
- the control unit 11 may include a plurality of processors.
- the analysis device 1 may be composed of a plurality of information processing devices. Further, as the analysis device 1, a general-purpose server device or the like may be used in addition to the information processing device designed exclusively for the provided service.
- FIG. 3 schematically illustrates an example of the hardware configuration of the packaging machine 3 according to the present embodiment.
- the wrapping machine 3 is a so-called horizontal pillow wrapping machine, which is a device for wrapping contents WA such as food (dried noodles, etc.) and stationery (eraser, etc.).
- the type of the content WA can be appropriately selected according to the embodiment, and is not particularly limited.
- the wrapping machine 3 broadcasts the film roll 30 on which the wrapping film is wound, the film transport unit 31 for transporting the wrapping film, the content transport unit 32 for transporting the content WA, and the content on the packaging film. It includes a bag making section 33.
- the packaging film can be, for example, a resin film such as a polyethylene film.
- the film roll 30 includes a winding core, and the packaging film is wound around the winding core.
- the winding core is rotatably supported around the axis, whereby the film roll 30 is configured so that the packaging film can be unwound while rotating.
- the film transport unit 31 includes a drive roller driven by a servomotor (servo 1) 311, a passive roller 312 to which a rotational force is applied from the drive roller, and a plurality of pulleys 313 that guide the packaging film while applying tension. , Is equipped.
- the film transport section 31 is configured to feed the packaging film from the film roll 30 and transport the delivered packaging film to the bag making section 33 without loosening it.
- the content transfer unit 32 includes a conveyor 321 that conveys the content WA to be packaged, and a servomotor (servo 2) 322 that drives the conveyor 321.
- the content transporting section 32 is connected to the bag making section 33 via the lower part of the film transporting section 31.
- the content WA transported by the content transport unit 32 is supplied to the bag making unit 33 and packaged by the packaging film supplied from the film transport unit 31.
- a fiber sensor (sensor 1) 324 for detecting the position of the content WA is provided in the information downstream of the conveyor 321.
- a fiber sensor (sensor 2) 325 for detecting the riding of the contents WA and the like.
- the bag making section 33 cuts the conveyor 331, the servo motor (servo 3) 332 that drives the conveyor 331, the center seal section 333 that seals the packaging film in the transport direction, and the packaging film on both ends in the transport direction. It includes an end seal portion 334 that seals at each end portion.
- the conveyor 331 conveys the content WA conveyed from the content transfer unit 32 and the packaging film supplied from the film transfer unit 31.
- the packaging film supplied from the film transport unit 31 is supplied to the center seal unit 333 while being appropriately bent so that both side edge portions in the width direction overlap each other.
- the center seal portion 333 is composed of, for example, a pair of left and right heating rollers (heaters 1 and 2), and seals both side edge portions of the bent packaging film along the transport direction by heating.
- the packaging film is formed in a tubular shape.
- the content WA is put into the packaging film formed in this tubular shape.
- a fiber sensor (sensor 3) 336 that detects the position of the content WA is provided above the conveyor 331.
- the end seal portion 334 has, for example, a roller driven by a servomotor 335, a pair of cutters that open and close by rotation of the rollers, and heaters (heaters 3) provided on both sides of each cutter. ..
- the end seal portion 334 is configured so that the tubular packaging film can be cut in the direction orthogonal to the transport direction and can be sealed by heating at the cut portion. After passing through the end seal portion 334, the tip portion of the packaging film formed in a tubular shape is sealed on both sides in the transport direction and separated from the subsequent portion to become a packaging body WB containing the contents WA.
- the above-mentioned packaging machine 3 can wrap the contents WA in the following steps. That is, the film transport unit 31 feeds out the packaging film from the film roll 30. In addition, the content transport unit 32 transports the content WA to be packaged. Next, the center seal portion 333 of the bag making portion 33 forms the unwound packaging film into a tubular shape. Then, after the content WA is put into the formed tubular packaging film, the tubular packaging film is cut in the direction orthogonal to the transport direction by the end seal portion 334, and both sides of the cut portion in the transport direction are cut. Seal by heating with. As a result, a horizontal pillow type package WB containing the content WA is formed. That is, the packaging of the contents WA is completed.
- the drive of the packaging machine 3 can be controlled by a PLC or the like provided separately from the packaging machine 3.
- the above-mentioned operating state data 124 can be acquired from the PLC.
- 10 mechanisms are set in order to establish a causal relationship of abnormality. That is, the above-mentioned servos 1 to 4, heaters 1 to 3, and sensors 1 to 3 are set as mechanisms, and a causal relationship between these mechanisms when an abnormality occurs is constructed as a causal relationship model. Details will be described later.
- FIG. 4 is an example of the functional configuration of the analysis device 1 according to the present embodiment.
- the control unit 11 of the analysis device 1 expands the program 8 stored in the storage unit 12 into the RAM. Then, the control unit 11 interprets and executes the program 8 expanded in the RAM by the CPU to control each component.
- the analysis device 1 according to the present embodiment functions as a computer including a feature amount acquisition unit 111, a model construction unit 112, and a display control unit 113.
- the feature amount acquisition unit 111 is an operating state data indicating the operating state of the packaging machine 3 at the time when the packaging machine 3 normally forms the packaging body WB and at the time when an abnormality occurs in the formed packaging body WB.
- the values of a plurality of types of features calculated from 124 are acquired.
- the model construction unit 112 uses the acquired values of the features of each type during normal and abnormal times to derive a degree of association between the abnormalities occurring in the formed package WB and the features of each type. Based on this, a feature amount effective for predicting anomalies is selected from the acquired multiple types of feature amounts. Then, using the selected features, a causal relationship model 123 showing a causal relationship between the mechanisms when an abnormality occurs is constructed.
- the display control unit 113 has a function of displaying the above-described schematic diagram of the packaging machine 3, a causal relationship model, various feature amounts, and the like on the screen 21 of the display device 2. In addition, the display control unit 113 controls to display various information on the screen 21 of the display device 2.
- each function of the analysis device 1 will be described in detail in an operation example described later.
- an example in which all of the above functions are realized by a general-purpose CPU is described.
- some or all of the above functions may be realized by one or more dedicated processors.
- the functions may be omitted, replaced, or added as appropriate according to the embodiment.
- FIG. 5 illustrates an example of the processing procedure of the analyzer when creating a causal relationship model.
- Step S101 In the first step S101, the control unit 11 of the analysis device 1 functions as the feature amount acquisition unit 111, and an abnormality occurs in the normal time when the packaging machine 3 normally forms the package WB and in the formed package WB. For each of the abnormal cases, the values of a plurality of types of features calculated from the operating state data 124 indicating the operating state of the packaging machine 3 are acquired.
- the control unit 11 classifies the normal time and the abnormal time, and collects the operation state data 124.
- the type of operating state data 124 to be collected is not particularly limited as long as it is data indicating the state of the packaging machine 3, but in the present embodiment, data that can occur in driving each mechanism described above, for example, torque, speed, and so on. It can be measured data such as acceleration, temperature, and pressure.
- measurement data such as ON time, OFF time, turn ON time, and turn OFF time can be used as operation state data 124.
- the ON time and the OFF time are the total times during which the control signal in the target frame is ON or OFF, and the turn ON time and the turn OFF time are the targets. This is the time until the control signal is turned ON or OFF for the first time in the frame.
- the control unit 11 can acquire the detection result of each sensor, for example, the detection data indicating whether or not the content WA exists as “on” and “off” as the operation state data 124.
- the collected operation state data 124 may be stored in the storage unit 12 or may be stored in an external storage device.
- the control unit 11 divides the collected operation state data 124 into frames in order to define the processing range for calculating the feature amount. For example, the control unit 11 may divide the operation state data 124 into frames having a fixed time length. However, the packaging machine 3 does not always operate at regular time intervals. Therefore, if the operation state data 124 is divided into frames having a fixed time length, the operation of the packaging machine 3 reflected in each frame may be deviated.
- the control unit 11 divides the operation state data 124 into frames for each tact time.
- the takt time is the time required to produce a predetermined number of products, that is, to form a predetermined number of packages WB. This takt time can be specified based on a signal that controls the packaging machine 3, for example, a control signal that controls the operation of each servomotor of the packaging machine 3.
- FIG. 6 schematically illustrates the relationship between the control signal and the takt time.
- the control signal for a production facility that repeats the production of products such as the packaging machine 3 is a pulse signal in which "on" and "off” appear periodically according to the production of a predetermined number of products. It has become.
- control unit 11 can acquire this control signal from the packaging machine 3, and set the time from the rise (“on”) of the acquired control signal to the next rise (“on”) as the takt time. Then, as shown in FIG. 6, the control unit 11 can divide the operation state data 124 into frames for each takt time.
- control signal is not particularly limited as long as it is a signal that can be used to control the packaging machine 3.
- the packaging machine 3 is provided with a sensor for detecting a mark attached to the packaging film and the output signal of this sensor is used for adjusting the feed amount of the packaging film, the output signal of this sensor is used. May be used as a control signal.
- control unit 11 calculates the value of the feature amount from each frame of the operation state data 124.
- the type of feature quantity is not particularly limited as long as it indicates the characteristics of the production equipment.
- the control unit 11 controls the amplitude, maximum value, minimum value, average value, and dispersion value in the frame.
- Standard deviation, autocorrelation coefficient, maximum value of power spectrum obtained by Fourier transform, distortion, kurtosis, etc. may be calculated as feature quantities.
- the control unit 11 has an “on” time, an “off” time, in each frame.
- the duty ratio, the number of “on” times, the number of “off” times, and the like may be calculated as feature quantities.
- the feature amount may be derived not only from a single operating state data 124 but also from a plurality of operating state data 124.
- the control unit 11 may calculate the mutual correlation coefficient, ratio, difference, synchronization deviation amount, distance, and the like between the corresponding frames of the two types of operation state data 124 as feature quantities.
- the control unit 11 calculates a plurality of types of features as described above from the operation state data 124. As a result, the control unit 11 can acquire the values of a plurality of types of features calculated from the operation state data 124 for each of the normal state and the abnormal time.
- the processing from the collection of the operation state data 124 to the calculation of the value of the feature amount may be performed not by the analysis device 1 but by the packaging machine 3 or various devices that control the packaging machine 3. Further, even if the control unit 11 discretizes the value of each type of feature amount, for example, a state higher than the threshold value is "1" or "high", and a state lower than the threshold value is "0" or "low”. Good.
- Step S102 In the next step S102, the control unit 11 functions as the model construction unit 112, and the abnormality that occurs in the package WB formed from the values of the respective types of features in the normal state and the abnormal state acquired in step S101. Based on a predetermined algorithm that specifies the degree of association with each type of feature amount, a feature amount effective for predicting anomalies is selected from a plurality of types of acquired feature amounts.
- the predetermined algorithm may be configured using, for example, a Bayesian network.
- the Bayesian network is one of the graphical modeling in which the causal relationship between a plurality of random variables is expressed by a directed acyclic graph structure and the causal relationship between each random variable is expressed by a conditional probability.
- the control unit 11 treats each acquired feature amount and the state of the package WB as a random variable, that is, sets each acquired feature amount and the state of the package WB in each node to construct a Bayesian network. Therefore, the causal relationship between each feature amount and the state of the package WB can be derived.
- a known method may be used for constructing the Bayesian network. For example, a structural learning algorithm such as a Greedy Search algorithm, a Stingy Search algorithm, or a total search method can be used to construct a Bayesian network.
- AIC Alkaike's. Information Criterion
- C4.5 C4.5
- CHM Channel Herskovits Measurement
- MDL Minimum Description Length
- ML Maximum Likelihood
- a pairwise method, a wristwise method, or the like can be used as a processing method when a missing value is included in the learning data (operating state data 124) used for constructing the Bayesian network.
- FIG. 7A shows a causal relationship model when the wear of the leather belt is an abnormal event. That is, the torque average value and the standard deviation of the position, which are the feature amounts of the servo 1, affect the speed average value and the torque maximum value, which are the feature amounts of the servo 2, and these affect the torque average value of the servo 4.
- a causal relationship model of giving is constructed.
- FIG. 7B shows a causal relationship model when the looseness of the chain of the conveyor 321 of the content transport unit 32 is an abnormal event. That is, a causal relationship model is constructed in which the ON time, which is the feature amount of the sensor 2, affects the turn ON time, which is the feature amount of the sensor 3, and further affects the torque average value of the servo 4.
- FIG. 7C shows a causal relationship model when a defective seal of the packaging film is an abnormal event.
- a causal relationship model is constructed in which only the average torque value of the servo 4 is the cause of this abnormal event.
- the causal relationship model constructed in this way is stored in the storage unit 12 as the causal relationship model data 123.
- the method of handling each acquired feature amount and the state of the package WB as a random variable can be appropriately set according to the embodiment.
- the state of the package WB is probable by associating the probability with each event by setting the event that the package WB is normal as "0" and the event that the package WB is abnormal as "1". It can be regarded as a variable.
- an event in which the value of each feature amount is equal to or less than the threshold value is set to "0”
- an event in which the value of each feature amount exceeds the threshold value is set to "1”
- the probability is associated with each event.
- the state of the feature quantity can be regarded as a random variable.
- the number of states set for each feature amount is not limited to two, and may be three or more.
- FIG. 8 is a diagram in which a mechanism that can be a causative element of an abnormal event in the present embodiment is superimposed on a schematic diagram.
- the servos 1 to 4, heaters 1 to 3, and sensors 1 to 3, which are the nodes of the causal relationship model, are arranged at the positions where they are installed in the schematic diagram. Then, on the screen 21 of the display device 2 described below, the mechanism for constructing the causal relationship model is selected as a node from among these mechanisms according to the abnormal event selected by the user, and the causal relationship is selected. An edge with an arrow indicating is displayed with the node.
- FIG. 9A is an example of the screen 21 of the display device 2 showing the causal relationship model.
- This screen 21 can be operated by the input device 15 described above.
- a selection box 211 for selecting an abnormal event is displayed on the upper left, and an abnormal event can be selected from a pull-down menu.
- leather belt wear, chain loosening, and poor sealing are shown as abnormal events, from which leather belt wear is selected.
- an abnormality cause diagram 212 in which a schematic diagram of the packaging machine and a causal relationship model are superimposed is displayed.
- the abnormality cause diagram when the abnormality event is the wear of the leather belt is displayed.
- a list 213 showing the mechanism that is the cause element and the feature amount thereof is displayed according to the selected abnormality event.
- the user can select any of the mechanisms and features from this list 213, and when one is selected, the corresponding mechanism in the abnormality cause diagram 212 is highlighted.
- (servo 1-torque average value) is selected from Listing 213, which highlights Servo 1 in the cause of abnormality FIG. 212.
- Various methods can be used for highlighting, and it may be displayed so as to be distinguishable from other nodes such as coloring and blinking.
- the change with time of the selected feature amount is displayed by the graph 214.
- a line graph 214 showing the change over time is displayed.
- FIG. 9B shows an example in which the looseness of the chain is displayed as an abnormal event in the box 211.
- the mechanism and the feature amount that cause the loosening of the chain are displayed in the list 213.
- (servo 4-torque average value) is selected, the servo 4 of the abnormality cause FIG. 212 is emphasized, and the line graph 214 showing the change over time of (servo 4-torque average value) is shown. It is displayed.
- FIG. 9C shows an example in which a defective seal is displayed as an abnormal event in the box 211.
- the mechanism and the feature amount that cause the seal failure are displayed.
- (servo 4-torque average value) is selected, the servo 4 in the abnormality cause diagram is emphasized, and a line graph 214 showing the change over time of (servo 4-torque average value) is displayed. Has been done.
- the operations on the above screen 21 can be summarized as follows.
- the user selects an abnormal event to be confirmed from the selection box 211 by the input device 15.
- the display control unit 113 displays the abnormality cause diagram 212 and the list 213 corresponding to the selected abnormality event on the screen.
- the node of the corresponding abnormality cause FIG. 212 is highlighted, and the graph 214 showing the change with time of the selected feature amount is displayed. Therefore, the user can visually recognize the causal relationship related to the abnormal event while looking at the screen 21.
- the user can appropriately set the period of time-dependent changes in the feature amount displayed on the graph 214.
- a schematic diagram of the packaging machine 3 and a causal relationship model related to an abnormality that may occur in the packaging machine 3 are displayed on the screen 21 of the display device 2.
- the causal relational model is superimposed and displayed on the screen 21 so as to correspond to the schematic diagram, the causal element included in the causal relational model can be specified while looking at the schematic diagram. Therefore, it is possible to easily visually recognize where the abnormality is occurring in the packaging machine 3.
- the causative element and the corresponding feature amount for each abnormal event are displayed on the screen 21 as a list 213, the causative element for solving the abnormality and the feature amount for controlling the abnormality can be visually recognized. it can. For example, even if the cause elements are the same, the feature amount to be controlled may differ depending on the abnormality. Therefore, by looking at Listing 213, it is possible to easily know which feature amount should be controlled.
- the causal element in the causal relational model displayed on the screen 21 can be emphasized and displayed. Therefore, for example, the user can easily visually recognize the position of the causative element selected on the schematic diagram.
- the abnormal event selection box 211, the abnormality cause diagram 212, the list 213, and the graph 214 are displayed on the screen 21, but the present invention is not limited to this, and at least the abnormality cause diagram 212 is shown. It suffices if it is done. For example, depending on the target production facility, there may be one abnormal event, and in this case, the selection box 211 is also unnecessary. Further, it is not necessary to display all the elements 211 to 214 on the screen 21, and these may be displayed separately on a plurality of screens so that the user can switch between them.
- the construction of the causal relationship model shown in the above embodiment is an example, and may be another method. Further, the schematic diagram data 122 and the causal relationship model data 123 constructed by another device can be sequentially stored in the storage unit 12.
- ⁇ 5-3> It can also be applied to production equipment other than the packaging machine 3, and in that case, a mechanism for constructing a causal relationship model can be appropriately selected according to the production equipment. Further, it is also possible to store schematic data relating to a plurality of production facilities in the storage unit 12 and display the corresponding production facilities on the display device 2.
- the display system according to the present invention can be configured by the analysis device 1 and the display device 2 in the production system. Therefore, the display device 2 of the above embodiment corresponds to the display unit of the present invention, and the control unit 11 and the storage unit 12 of the analysis device 1 correspond to the control unit and the storage unit of the present invention.
- the control unit, the storage unit, and the display unit according to the present invention can be configured by a tablet PC or the like.
Abstract
本発明に係る表示システムは、製品を生産する生産設備であって、当該生産設備の駆動を行う少なくとも1つの駆動手段及び前記生産の監視を行う少なくとも1つの監視手段を有する生産設備に設けられる表示装置であって、制御部と、表示部と、記憶部と、入力部と、を備え、前記記憶部は、前記生産設備の概略図を表す概略図データと、前記生産設備に生じ得る少なくとも1つの異常の原因要素を、前記駆動手段及び前記監視手段の中から少なくとも1つ選択するとともに、当該原因要素の関係とともに因果関係モデルとして表した因果関係モデルデータと、を記憶し、前記制御部は、前記表示部に、前記概略図と、当該概略図と対応するように、前記因果関係モデルを重ねるように表示するように構成されている。
Description
本発明は、表示システム、表示方法、及び表示プログラムに関する。
設備状態を監視する方法として、特許文献1では、イベント信号に基づいて運転状態別にモード分割し、モード毎に正常モデルを作成し、作成した正常モデルに基づいて異常判定を行う方法が提案されている。この方法では、正常モデルの作成に用いた学習データの十分性をチェックし、その結果に応じて、異常判定に利用する閾値を設定することで、正常を異常と判定する誤報の発生を防止している。
また、特許文献2では、生産設備が生産する製品に異常が生じたことを検知する方法が提案されている。具体的に、特許文献2では、生産システムから収集されるデータを製品が正常な場合と異常な場合とに分類し、正常な場合と異常な場合とで有意な差異が生じる特徴量を特定して、特定した特徴量に基づいて製品が正常であるか否かを診断する方法が提案されている。
ところで、生産設備において、異常が生じた場合には、これを即座に解決しなければならないが、ユーザは、生じた異常の原因をマニュアルなどで調べた上で、解決のための処理を行うのが一般的である。しかしながら、異常が生じる度にマニュアルを調べるとなると、時間を要し、処理が遅れることがある。本発明は、この問題を解決するためになされたものであり、生産設備において生じ得る異常の原因を容易に確認することができる、表示システム、表示方法、及び表示プログラムを提供することを目的とする。
本発明に係る表示システムは、製品を生産する生産設備であって、当該生産設備の駆動を行う少なくとも1つの駆動手段及び前記生産の監視を行う少なくとも1つの監視手段を有する生産設備に設けられる表示システムであって、制御部と、表示部と、記憶部と、入力部と、を備え、前記記憶部は、前記生産設備の概略図を表す概略図データと、前記生産設備に生じ得る少なくとも1つの異常の原因要素を、前記駆動手段及び前記監視手段の中から少なくとも1つ選択するとともに、当該原因要素の関係とともに因果関係モデルとして表した因果関係モデルデータと、を記憶し、前記制御部は、前記表示部に、前記概略図と、当該概略図と対応するように、前記因果関係モデルを重ねるように表示するように構成されている。
この構成によれば、生産設備の概略図と、生産設備において生じ得る異常に係る因果関係モデルと、を表示部に表示するようにしている。このとき、表示部には、概略図と対応するように因果関係モデルが重ねられて表示されるため、因果関係モデルに含まれる原因要素を、概略図を見ながら特定することができる。したがって、生産設備において異常がどこで生じているかを容易に視認することができる。
上記表示システムにおいて、前記記憶部は、複数の前記異常に係る因果関係モデルデータを記憶し、前記入力部は、前記複数の異常の中から、1つの異常の選択を受け付けるように構成され、前記制御部は、選択された前記異常に対応する前記因果関係モデルを前記表示部に表示するように構成することができる。
この構成によれば、複数の異常に係る因果関係モデルデータが記憶されているため、ユーザは、複数の異常の中から、例えば、実際に生じた異常を入力部によって選択することができる。したがって、生じた異常毎に、因果関係モデルを容易に確認することができる。
上記表示システムにおいて、前記駆動手段及び監視手段は、制御可能な少なくとも1つの特徴量を有しており、前記制御部は、前記各異常の原因要素と、当該原因要素に対応する少なくとも1つの前記特徴量とを、リストとして前記表示部に表示することができる。
この構成によれば、異常毎に原因要素と、それに対応する特徴量とをリストとして表示部に表示するため、異常を解決するための原因要素と、それを制御する特徴量とを視認することができる。例えば、同じ原因要素であっても、異常によって制御されるべき特徴量が異なることがあるため、リストを見ることで、どの特徴量を制御すべきかを容易に知ることができる。
上記表示システムにおいて、前記入力部は、前記リストから前記原因要素の1つの選択を受け付け、前記制御部は、前記表示部に表示された前記因果関係モデルにおいて、選択された前記原因要素を強調して表示するように構成することができる。
この構成によれば、リストから原因要素を選択することで、表示部に表示された因果関係モデルの中の原因要素を強調して表示することができる。したがって、ユーザは、例えば、概略図上で選択された原因要素の位置を容易に視認することができる。
本発明に係る表示方法は、製品を生産する生産設備であって、当該生産設備の駆動を行う少なくとも1つの駆動手段及び前記生産の監視を行う少なくとも1つの監視手段を有する生産設備において生じ得る異常の因果関係を表示部に表示するための表示方法であって、前記生産設備の概略図を表す概略図データを記憶するステップと、前記生産設備における少なくとも1つの異常の原因要素を、前記駆動手段及び前記監視手段の中から少なくとも1つ選択するとともに、当該原因要素の関係とともに因果関係モデルとして表した因果関係モデルデータを記憶するステップと、前記表示部に、前記概略図と、当該概略図と対応するように、前記因果関係モデルを重ねるように表示するステップと、を備えている。
本発明に係る表示プログラムは、製品を生産する生産設備であって、当該生産設備の駆動を行う少なくとも1つの駆動手段及び前記生産の監視を行う少なくとも1つの監視手段を有する生産設備において生じ得る異常の因果関係を表示部に表示するための表示プログラムであって、コンピュータに、前記生産設備の概略図を表す概略図データを記憶するステップと、前記生産設備における少なくとも1つの異常の原因要素を、前記駆動手段及び前記監視手段の中から少なくとも1つ選択するとともに、当該原因要素の関係とともに因果関係モデルとして表した因果関係モデルデータを記憶するステップと、前記表示部に、前記概略図と、当該概略図と対応するように、前記因果関係モデルを重ねるように表示するステップと、を実行させる。
本発明によれば、生産設備において生じ得る異常の原因を容易に確認することができる。
以下、本発明の一側面に係る実施の形態(以下、「本実施形態」とも表記する)を、図面に基づいて説明する。ただし、以下で説明する本実施形態は、あらゆる点において本発明の例示に過ぎない。本発明の範囲を逸脱することなく種々の改良や変形を行うことができることは言うまでもない。つまり、本発明の実施にあたって、実施形態に応じた具体的構成が適宜採用されてもよい。なお、本実施形態において登場するデータを自然言語により説明しているが、より具体的には、コンピュータが認識可能な疑似言語、コマンド、パラメータ、マシン語等で指定される。
<1.適用例>
まず、図1を用いて、本発明が適用される場面の一例について説明する。図1は、本実施形態に係る生産システムの適用場面の一例を模式的に例示する。本実施形態に係る生産システムは、生産設備の一例である包装機3と、解析装置1と、表示装置2と、を備えている。解析装置1は、包装機3に設けられたサーボモータ(駆動手段)や各種センサ(監視手段)間の因果関係を導出し、これを表示するように構成されたコンピュータである。なお、以下では、サーボモータ等の駆動手段や各種センサ等の監視手段を合わせて機構と称することとする。また、本発明に係る原因要素とは、機構のうち、異常が生じる際の原因となる機構に相当する。
まず、図1を用いて、本発明が適用される場面の一例について説明する。図1は、本実施形態に係る生産システムの適用場面の一例を模式的に例示する。本実施形態に係る生産システムは、生産設備の一例である包装機3と、解析装置1と、表示装置2と、を備えている。解析装置1は、包装機3に設けられたサーボモータ(駆動手段)や各種センサ(監視手段)間の因果関係を導出し、これを表示するように構成されたコンピュータである。なお、以下では、サーボモータ等の駆動手段や各種センサ等の監視手段を合わせて機構と称することとする。また、本発明に係る原因要素とは、機構のうち、異常が生じる際の原因となる機構に相当する。
解析装置1は、包装機3に生じ得る異常について、機構間の因果関係モデルを生成し、これを表示装置2の画面21に表示する。図1の例では、後述するフィルムロール30(図3参照)のブレーキ用の革ベルトの摩耗が異常として生じるときの因果関係モデルを示している。すなわち、包装機3に設けられた複数のサーボモータのうち、サーボ1,3,4がノードとして表示され、これらがエッジにより連結されている。そして、エッジの向きが因果関係を示している。つまり、革ベルトの摩耗が生じるときには、サーボ1がサーボ3に影響を及ぼし、さらにサーボ3がサーボ4に影響を及ぼすことで、結果として革ベルトの摩耗が生じることを示している。したがって、包装機3の作業者は、サーボ4,3,1の順に異常が生じる原因を確認すればよい。但し、詳細は後述するが、各サーボモータには、トルク、位置などの制御可能な複数の特徴量があり、サーボモータの特徴量のいずれかが上記因果関係を構築する。
また、図1の例に示すように、表示装置2には、包装機3の概略図が表示され、この概略図に因果関係モデルが重ねて表示される。このとき、因果関係モデルの各ノードは、包装機3の概略図において、各サーボモータが設けられている位置に配置される。したがって、作業者は、概略図を見ながら、異常の原因となる機構を特定することができる。そのため、包装機3において、どの機構を確認にすれば、異常を正常に戻すことができるかを容易に視認することができる。
なお、上記の説明では、生産設備の例として包装機3を示しているが、何らかの物を生産可能であればよく、その種類は、特に限定されなくてもよい。各機構の種類は、特に限定されなくてもよく、実施の形態に応じて適宜選択されてよい。各機構は、例えば、コンベア、ロボットアーム、サーボモータ、シリンダ(成形機等)、吸着パッド、カッター装置、シール装置等であってよい。また、各機構は、上述した包装機3のほか、例えば、印刷機、実装機、リフロー炉、基板検査装置等の複合装置であってもよい。更に、各機構は、例えば、上記のような何らかの物理的な動作を伴う装置の他に、例えば、各種センサにより何らかの情報を検知する装置、各種センサからデータを取得する装置、取得したデータから何らかの情報を検知する装置、取得したデータを情報処理する装置等の内部処理を行う装置を含んでもよい。1つの機構は、1又は複数の装置で構成されてもよいし、装置の一部で構成されてもよい。複数の機構により1つの装置が構成されてもよい。また、同一の装置が複数の処理を実行する場合には、それぞれを別の機構とみなしてもよい。例えば、同一の装置が第1の処理と第2の処理とを実行する場合に、第1の処理を実行する当該装置を第1の機構とみなし、第2の処理を実行する当該装置を第2の機構とみなしてもよい。
<2.構成例>
<2-1.ハードウェア構成>
次に、本実施形態に係る生産システムのハードウェア構成の一例について説明する。図2は、本実施形態に係る解析装置1のハードウェア構成の一例を示すブロック図であり、図3は包装機の概略構成を示す図である。
<2-1.ハードウェア構成>
次に、本実施形態に係る生産システムのハードウェア構成の一例について説明する。図2は、本実施形態に係る解析装置1のハードウェア構成の一例を示すブロック図であり、図3は包装機の概略構成を示す図である。
<2-1-1.解析装置>
まず、図2を用いて、本実施形態に係る解析装置1のハードウェア構成の一例を説明する。図2に示すように、この解析装置1は、制御部11、記憶部12、通信インタフェース13、外部インタフェース14、入力装置15、及びドライブ16が電気的に接続されたコンピュータである。
まず、図2を用いて、本実施形態に係る解析装置1のハードウェア構成の一例を説明する。図2に示すように、この解析装置1は、制御部11、記憶部12、通信インタフェース13、外部インタフェース14、入力装置15、及びドライブ16が電気的に接続されたコンピュータである。
制御部11は、CPU(Central Processing Unit)、RAM(Random Access Memory)、ROM(Read Only Memory)等を含み、情報処理に応じて各構成要素の制御を行う。記憶部12は、例えば、ハードディスクドライブ、ソリッドステートドライブ等の補助記憶装置であり、制御部11で実行されるプログラム121、概略図データ122、因果関係モデルデータ123、及び動作状態データ124等を記憶する。
プログラム121は、包装機3に生じる異常と機構との因果関係モデルを生成したり、これを表示装置2に表示すること等を行うためのプログラムである。概略図データ122は、対象となる生産設備の概略図が示されたデータであり、本実施形態においては、包装機3の概略図を示すデータである。概略図は、少なくとも因果関係モデルで示される機構の位置が分かるような包装機全体の概略図であればよく、必ずしも詳細に図でなくてもよい。また、包装機3の一部のみを示す拡大図であってもよい。
因果関係モデルデータ123は、包装機3から抽出される各機構の特徴量によって構築される異常発生の因果関係モデルを示すデータである。すなわち、異常が発生するときの、機構間の因果関係を示すデータである。この解析装置1では、後述するように、包装機3から抽出される特徴量等によって因果関係モデルデータが生成されるが、外部の装置において予め生成された因果関係モデルデータを記憶することもできる。
動作状態データ124は、包装機3の動作状態を示すデータである。詳細は、後述するが、例えば、上述した各機構の駆動において生じ得るデータ、例えば、トルク、速度、加速度、温度、圧力等の計測データとすることができる。また、機構がセンサの場合には、検出される結果、例えば、内容物WAが存在するか否かを「on」と「off」とで示す検出データとすることができる。
通信インタフェース13は、例えば、有線LAN(Local Area Network)モジュール、無線LANモジュール等であり、有線又は無線通信を行うためのインタフェースである。すなわち、通信インタフェース13は、他の装置と通信を行うように構成された通信部の一例である。本実施形態の解析装置1は、通信インタフェース13を介して包装機3と接続されている。
外部インタフェース14は、外部装置と接続するためのインタフェースであり、接続する外部装置に応じて適宜構成される。本実施形態では、外部インタフェース14が、表示装置2に接続されている。なお、表示装置2は、公知の液晶ディスプレイ、タッチパネルディスプレイ等が用いられてよい。
入力装置15は、例えば、マウス、キーボード等の入力を行うための装置である。
ドライブ16は、例えば、CD(Compact Disk)ドライブ、DVD(Digital Versatile Disk)ドライブ等であり、記憶媒体17に記憶されたプログラムを読み込むための装置である。ドライブ16の種類は、記憶媒体17の種類に応じて適宜選択されてよい。なお、記憶部に記憶されている、プログラム121を含む各種のデータ122~125の少なくとも一部は、この記憶媒体17に記憶されていてもよい。
記憶媒体17は、コンピュータその他装置、機械等が記録されたプログラム等の情報を読み取り可能なように、このプログラム等の情報を、電気的、磁気的、光学的、機械的又は化学的作用によって蓄積する媒体である。図2では、記憶媒体17の一例として、CD、DVD等のディスク型の記憶媒体を例示している。しかしながら、記憶媒体17の種類は、ディスク型に限定される訳ではなく、ディスク型以外であってもよい。ディスク型以外の記憶媒体として、例えば、フラッシュメモリ等の半導体メモリを挙げることができる。
なお、解析装置1の具体的なハードウェア構成に関して、実施形態に応じて、適宜、構成要素の省略、置換及び追加が可能である。例えば、制御部11は、複数のプロセッサを含んでもよい。解析装置1は、複数台の情報処理装置で構成されてもよい。また、解析装置1には、提供されるサービス専用に設計された情報処理装置の他、汎用のサーバ装置等が用いられてよい。
<2-1-2.包装機>
次に、図3を用いて、本実施形態に係る包装機3のハードウェア構成の一例を説明する。図3は、本実施形態に係る包装機3のハードウェア構成の一例を模式的に例示する。包装機3は、いわゆる横ピロー包装機であり、食品(乾燥麺等)、文房具(消しゴム等)等の内容物WAを包装する装置である。但し、内容物WAの種類は、実施の形態に応じて適宜選択可能であり、特には限定されない。この包装機3は、包装フィルムが巻き取られたフィルムロール30と、包装フィルムを搬送するフィルム搬送部31と、内容物WAを搬送する内容物搬送部32と、内容物を包装フィルムで放送する製袋部33と、を備えている。
次に、図3を用いて、本実施形態に係る包装機3のハードウェア構成の一例を説明する。図3は、本実施形態に係る包装機3のハードウェア構成の一例を模式的に例示する。包装機3は、いわゆる横ピロー包装機であり、食品(乾燥麺等)、文房具(消しゴム等)等の内容物WAを包装する装置である。但し、内容物WAの種類は、実施の形態に応じて適宜選択可能であり、特には限定されない。この包装機3は、包装フィルムが巻き取られたフィルムロール30と、包装フィルムを搬送するフィルム搬送部31と、内容物WAを搬送する内容物搬送部32と、内容物を包装フィルムで放送する製袋部33と、を備えている。
包装フィルムは、例えば、ポリエチレンフィルム等の樹脂フィルムとすることができる。フィルムロール30は巻き芯を備えており、包装フィルムはその巻き芯に巻き取られている。巻き芯は軸周りに回転可能に支持されており、これにより、フィルムロール30は、回転しながら包装フィルムを繰り出すことができるように構成されている。
フィルム搬送部31は、サーボモータ(サーボ1)311により駆動される駆動ローラと、この駆動ローラから回転力を付与される受動ローラ312と、包装フィルムにテンションをかけながらガイドする複数のプーリ313と、を備えている。これにより、フィルム搬送部31は、フィルムロール30から包装フィルムを繰り出し、繰り出した包装フィルムを弛ませることなく製袋部33に搬送するように構成されている。
内容物搬送部32は、包装対象となる内容物WAを搬送するコンベア321と、コンベア321を駆動するサーボモータ(サーボ2)322と、を備えている。図3に例示されるように、内容物搬送部32は、フィルム搬送部31の下方を経て、製袋部33に連結している。これにより、内容物搬送部32により搬送される内容物WAは、製袋部33に供給されるとともに、フィルム搬送部31から供給された包装フィルムにより包装される。また、コンベア321の下流の情報には、内容物WAの位置を検知するファイバセンサ(センサ1)324が設けられている。さらに、コンベア321の下方には、内容物WAの乗り上げ等を検知するファイバセンサ(センサ2)325が設けられている。これらセンサ1,2により、内容物WAが正しく包装されるために、正しい位置で搬送されているか否かを検知する。
製袋部33は、コンベア331と、コンベア331を駆動するサーボモータ(サーボ3)332と、包装フィルムを搬送方向にシールするセンターシール部333と、包装フィルムを搬送方向の両端側で切断し、各端部でシールするエンドシール部334と、を備えている。
コンベア331は、内容物搬送部32から搬送された内容物WAとフィルム搬送部31から供給された包装フィルムとを搬送する。フィルム搬送部31から供給された包装フィルムは、幅方向の両側端縁部同士が重なるように適宜折り曲げられつつ、センターシール部333に供給される。センターシール部333は、例えば、左右一対の加熱ローラ(ヒータ1,2)により構成されており、折り曲げられた包装フィルムの両側端縁部を加熱により搬送方向に沿ってシールする。これにより、包装フィルムは、筒状に形成される。内容物WAは、この筒状に形成された包装フィルム内に投入される。また、エンドシール部334の上流側には、コンベア331の上方に、内容物WAの位置を検知するファイバセンサ(センサ3)336が設けられている。
一方、エンドシール部334は、例えば、サーボモータ335により駆動されるローラと、ローラの回転によって開閉する一対のカッタと、各カッタの両側に設けられるヒータ(ヒータ3)と、を有している。これらにより、エンドシール部334は、搬送方向に直交する方向に筒状の包装フィルムをカットするとともに、カットした部分で加熱によりシールすることができるように構成されている。このエンドシール部334を通過すると、筒状に形成された包装フィルムの先端部分は、搬送方向の両側でシールされ、後続から分離されて、内容物WAを内包する包装体WBとなる。
<2-1-3.包装工程>
以上の包装機3は、次のような工程で、内容物WAの包装を行うことができる。すなわち、フィルム搬送部31によって、フィルムロール30から包装フィルムを繰り出す。また、内容物搬送部32によって、包装対象となる内容物WAを搬送する。次に、製袋部33のセンターシール部333によって、繰り出された包装フィルムを筒状に形成する。そして、形成した筒状の包装フィルムに内容物WAを投入した上で、エンドシール部334によって、搬送方向に直交する方向に筒状の包装フィルムをカットすると共に、カットした部分の搬送方向の両側で加熱によりシールする。これにより、内容物WAを内包する横ピロー型の包装体WBが形成される。すなわち、内容物WAの包装が完了する。
以上の包装機3は、次のような工程で、内容物WAの包装を行うことができる。すなわち、フィルム搬送部31によって、フィルムロール30から包装フィルムを繰り出す。また、内容物搬送部32によって、包装対象となる内容物WAを搬送する。次に、製袋部33のセンターシール部333によって、繰り出された包装フィルムを筒状に形成する。そして、形成した筒状の包装フィルムに内容物WAを投入した上で、エンドシール部334によって、搬送方向に直交する方向に筒状の包装フィルムをカットすると共に、カットした部分の搬送方向の両側で加熱によりシールする。これにより、内容物WAを内包する横ピロー型の包装体WBが形成される。すなわち、内容物WAの包装が完了する。
なお、包装機3の駆動の制御は、包装機3とは別個に設けたPLCなどで行うこともできる。この場合、上述した動作状態データ124は、PLCから取得することができる。また、上記のように構成された包装機3では、一例として、異常の因果関係を構築するために、10個の機構が設定されている。すなわち、上述したサーボ1~4,ヒータ1~3,及びセンサ1~3が機構として設定され、異常が発生するときの、これら機構間の因果関係が因果関係モデルとして構築される。詳細は後述する。
<2-2.機能構成>
次に、解析装置1の機能構成(ソフトウエア構成)を説明する。図4は、本実施形態に係る解析装置1の機能構成の一例である。解析装置1の制御部11は、記憶部12に記憶されたプログラム8をRAMに展開する。そして、制御部11は、RAMに展開されたプログラム8をCPUにより解釈及び実行して、各構成要素を制御する。これによって、図4に示すように、本実施形態に係る解析装置1は、特徴量取得部111、モデル構築部112、及び表示制御部113を備えるコンピュータとして機能する。
次に、解析装置1の機能構成(ソフトウエア構成)を説明する。図4は、本実施形態に係る解析装置1の機能構成の一例である。解析装置1の制御部11は、記憶部12に記憶されたプログラム8をRAMに展開する。そして、制御部11は、RAMに展開されたプログラム8をCPUにより解釈及び実行して、各構成要素を制御する。これによって、図4に示すように、本実施形態に係る解析装置1は、特徴量取得部111、モデル構築部112、及び表示制御部113を備えるコンピュータとして機能する。
特徴量取得部111は、包装機3が包装体WBを正常に形成した正常時、及び形成される包装体WBに異常が生じた異常時それぞれについて、包装機3の動作状態を示す動作状態データ124から算出される複数種類の特徴量の値を取得する。モデル構築部112は、取得した正常時及び異常時それぞれの各種類の特徴量の値から、形成される包装体WBに生じる異常と各種類の特徴量との関連度を導出する所定のアルゴリズムに基づいて、取得した複数種類の特徴量の中から異常の予測に有効な特徴量を選択する。そして、選択した特徴量を用いて、異常が生じるときの、機構間の因果関係を示す因果関係モデル123を構築する。
表示制御部113は、上述した包装機3の概略図、因果関係モデル、各種の特徴量等を表示装置2の画面21に表示する機能を有する。その他、表示制御部113は、表示装置2の画面21に各種の情報を表示するための制御を行う。
解析装置1の各機能に関しては後述する動作例で詳細に説明する。なお、本実施形態では、以上の機能がいずれも汎用のCPUによって実現される例について説明している。しかしながら、以上の機能の一部又は全部が、1又は複数の専用のプロセッサにより実現されてもよい。また、解析装置1の機能構成に関しては、実施形態に応じて、適宜、機能の省略、置換及び追加が行われてもよい。
<3.動作例>
次に、上記のように構成された生産システムの動作例を説明する。
次に、上記のように構成された生産システムの動作例を説明する。
<3-1.因果関係モデルの作成>
まず、図5を用いて、解析装置が因果関係モデルを作成する際の処理手順について説明する。図5は、因果関係モデルを作成する際の解析装置の処理手順の一例を例示する。
まず、図5を用いて、解析装置が因果関係モデルを作成する際の処理手順について説明する。図5は、因果関係モデルを作成する際の解析装置の処理手順の一例を例示する。
(ステップS101)
最初のステップS101では、解析装置1の制御部11は、特徴量取得部111として機能し、包装機3が包装体WBを正常に形成した正常時、及び形成される包装体WBに異常が生じた異常時それぞれについて、包装機3の動作状態を示す動作状態データ124から算出される複数種類の特徴量の値を取得する。
最初のステップS101では、解析装置1の制御部11は、特徴量取得部111として機能し、包装機3が包装体WBを正常に形成した正常時、及び形成される包装体WBに異常が生じた異常時それぞれについて、包装機3の動作状態を示す動作状態データ124から算出される複数種類の特徴量の値を取得する。
具体的には、まず、制御部11は、正常時と異常時とに分類して、動作状態データ124を収集する。収集する動作状態データ124の種類は、包装機3の状態を示すデータであれば、特に限定されないが、本実施形態においては、上述した各機構の駆動において生じ得るデータ、例えば、トルク、速度、加速度、温度、圧力等の計測データとすることができる。
機構がセンサの場合には、ON時間、OFF時間、ターンON時間、ターンOFF時間などの計測データを動作状態データ124とすることができる。ON時間及びOFF時間は、後述する図6に示すように、対象とするフレーム内での制御信号がONまたはOFFとなっている総時間であり、ターンON時間及びターンOFF時間は、対象とするフレーム内で制御信号が初めてONまたはOFFになるまでの時間である。その他、制御部11は、各センサの検出結果、例えば、内容物WAが存在するか否かを「on」と「off」とで示す検出データを動作状態データ124として取得することができる。なお、収集した動作状態データ124は、記憶部12に蓄積してもよいし、外部の記憶装置に蓄積してもよい。
次に、制御部11は、特徴量を算出する処理範囲を規定するため、収集した動作状態データ124をフレーム毎に分割する。例えば、制御部11は、動作状態データ124を一定時間長のフレーム毎に分割してもよい。ただし、包装機3は、必ずしも一定時間間隔で動作しているとは限らない。そのため、動作状態データ124を一定時間長のフレーム毎に分割すると、各フレームに反映される包装機3の動作がずれてしまう可能性がある。
そこで、本実施形態では、制御部11は、動作状態データ124をタクト時間毎にフレーム分割する。タクト時間は、製品を所定個数分生産する、すなわち、包装体WBを所定個数分形成するのにかかる時間である。このタクト時間は、包装機3を制御する信号、例えば、包装機3の各サーボモータ等の動作を制御する制御信号に基づいて特定することができる。
図6を用いて、制御信号とタクト時間との関係について説明する。図6は、制御信号とタクト時間との関係を模式的に例示する。図6に示すように、包装機3のような製品の生産を繰り返す生産設備に対する制御信号は、所定個数分の製品の生産に応じて「on」と「off」とが周期的に表れるパルス信号になっている。
例えば、図6に示す制御信号では、1つの包装体WBを形成する間に、「on」と「off」とが1回ずつ表れている。そこで、制御部11は、この制御信号を包装機3から取得し、取得した制御信号の立ち上がり(「on」)から次の立ち上がり(「on」)までの時間をタクト時間とすることができる。そして、制御部11は、図6に示すように、タクト時間毎に動作状態データ124をフレームに分割することができる。
なお、制御信号の種類は、包装機3を制御するのに利用可能な信号であれば、特に限定されなくてもよい。例えば、包装機3が、包装フィルムに付されたマークを検知するためのセンサを備えており、このセンサの出力信号を包装フィルムの送り量の調節に利用する場合には、このセンサの出力信号を制御信号として利用してもよい。
次に、制御部11は、動作状態データ124の各フレームから特徴量の値を算出する。特徴量の種類は、生産設備の特徴を示すものであれば、特に限定されなくてもよい。
例えば、動作状態データ124が上記計測データのような量的データ(図6の物理量データ)である場合には、制御部11は、フレーム内の振幅、最大値、最小値、平均値、分散値、標準偏差、自己相関係数、フーリエ変換により得られるパワースペクトルの最大値、歪度、尖度等を特徴量として算出してもよい。
また、例えば、動作状態データ124が上記検出データのような質的データ(図6のパルスデータ)である場合には、制御部11は、各フレーム内の「on」時間、「off」時間、Duty比、「on」回数、「off」回数、等を特徴量として算出してもよい。
さらに、特徴量は、単一の動作状態データ124からだけではなく、複数件の動作状態データ124から導出してもよい。例えば、制御部11は、2種類の動作状態データ124の対応するフレーム同士の相互相関係数、比率、差分、同期のずれ量、距離、等を特徴量として算出してもよい。
制御部11は、動作状態データ124から上記のような特徴量を複数種類算出する。これにより、制御部11は、正常時及び異常時それぞれについて、動作状態データ124から算出される複数種類の特徴量の値を取得することができる。なお、動作状態データ124の収集から特徴量の値の算出までの処理は、解析装置1ではなく、包装機3またはそれを制御する各種の装置で行うようにしてもよい。また、制御部11は、各種類の特徴量の値を、例えば、閾値より高い状態を「1」又は「high」、閾値を低い状態を「0」又は「low」というように離散化してもよい。
(ステップS102)
次のステップS102では、制御部11は、モデル構築部112として機能し、ステップS101で取得した正常時及び異常時それぞれの各種類の特徴量の値から、形成される包装体WBに生じる異常と各種類の特徴量との関連度を特定する所定のアルゴリズムに基づいて、取得した複数種類の特徴量の中から異常の予測に有効な特徴量を選択する。
次のステップS102では、制御部11は、モデル構築部112として機能し、ステップS101で取得した正常時及び異常時それぞれの各種類の特徴量の値から、形成される包装体WBに生じる異常と各種類の特徴量との関連度を特定する所定のアルゴリズムに基づいて、取得した複数種類の特徴量の中から異常の予測に有効な特徴量を選択する。
所定のアルゴリズムは、例えば、ベイジアンネットワークを利用して構成されてもよい。ベイジアンネットワークは、複数の確率変数間の因果関係を有向非巡回グラフ構造で表現すると共に、各確率変数間の因果関係を条件付確率で表現するグラフィカルモデリングの1つである。
制御部11は、取得した各特徴量及び包装体WBの状態を確率変数として扱って、すなわち、取得した各特徴量及び包装体WBの状態を各ノードに設定して、ベイジアンネットワークを構築することで、各特徴量と包装体WBの状態との因果関係を導出することができる。ベイジアンネットワークの構築には、公知の方法が用いられてよい。例えば、ベイジアンネットワークの構築には、Greedy Search アルゴリズム、Stingy Search アルゴリズム、全探索法等の構造学習アルゴリズムを用いることができる。また、構築されるベイジアンネットワークの評価基準には、AIC(Akaike ' s. Information Criterion)、C4.5、CHM(Cooper Herskovits Measure)、MDL(Minimum Description Length)、ML(Maximum Likelihood)等を用いることができる。また、ベイジアンネットワークの構築に利用する学習データ(動作状態データ124)に欠損値が含まれる場合の処理方法として、ペアワイズ法、リストワイズ法等を用いることができる。
例えば、図7Aは、革ベルトの摩耗が異常イベントであるときの因果関係モデルを示している。すなわち、サーボ1の特徴量であるトルク平均値と位置の標準偏差が、サーボ2の特徴量である速度平均値とトルク最大値に影響を与え、さらにこれらがサーボ4のトルク平均値に影響を与える、という因果関係モデルが構築される。
図7Bは、内容物搬送部32のコンベア321のチェーンの緩みが異常イベントであるときの因果関係モデルを示している。すなわち、センサ2の特徴量であるON時間が、センサ3の特徴量であるターンON時間に影響を与え、さらにこれがサーボ4のトルク平均値に影響を与える、という因果関係モデルが構築される。
図7Cは、包装フィルムのシール不良が異常イベントであるときの因果関係モデルを示している。この異常イベントについては、サーボ4のトルク平均値のみが原因であるという因果関係モデルが構築される。このように構築された因果関係モデルは、因果関係モデルデータ123として、記憶部12に記憶される。
なお、取得した各特徴量及び包装体WBの状態を確率変数として取り扱う方法は、実施の形態に応じて適宜設定可能である。例えば、包装体WBが正常である事象を「0」、包装体WBに異常が発生している事象を「1」として、それぞれの事象に確率を対応させることにより、包装体WBの状態を確率変数とみなすことができる。また、例えば、各特徴量の値が閾値以下である事象を「0」、各特徴量の値が閾値を超えている事象を「1」として、それぞれの事象に確率を対応させることにより、各特徴量の状態を確率変数とみなすことができる。ただし、各特徴量に対して設定する状態数は、2つに限定されなくてもよく、3つ以上であってもよい。
<3-2.因果関係モデルの表示>
次に、上記のように構築された因果関係モデルの表示について説明する。このとき、解析装置1の制御部11は、表示制御部113として機能する。表示制御部113は、以下に示す画面21の表示を制御する。まず、表示制御部113は、記憶部12から読み出した概略図122と、上述した因果関係モデル123とを重ねて表示装置2の画面21に表示する。図8は、本実施形態における異常イベントの原因要素となり得る機構を、概略図に重ね合わせた図である。ここでは、上述したように、因果関係モデルのノードであるサーボ1~4,ヒータ1~3,及びセンサ1~3を、概略図において、それらが設置される位置に配置している。そして、次に説明する表示装置2の画面21においては、ユーザによって選択された異常イベントに応じて、これらの機構の中から、因果関係モデルを構築する機構がノードとして選択されるとともに、因果関係を示す矢印が示されたエッジがノードとともに表示される。
次に、上記のように構築された因果関係モデルの表示について説明する。このとき、解析装置1の制御部11は、表示制御部113として機能する。表示制御部113は、以下に示す画面21の表示を制御する。まず、表示制御部113は、記憶部12から読み出した概略図122と、上述した因果関係モデル123とを重ねて表示装置2の画面21に表示する。図8は、本実施形態における異常イベントの原因要素となり得る機構を、概略図に重ね合わせた図である。ここでは、上述したように、因果関係モデルのノードであるサーボ1~4,ヒータ1~3,及びセンサ1~3を、概略図において、それらが設置される位置に配置している。そして、次に説明する表示装置2の画面21においては、ユーザによって選択された異常イベントに応じて、これらの機構の中から、因果関係モデルを構築する機構がノードとして選択されるとともに、因果関係を示す矢印が示されたエッジがノードとともに表示される。
図9Aは、因果関係モデルを示す表示装置2の画面21の例である。この画面21は、上述した入力装置15により操作することができる。この画面21には、左上に異常イベントを選択するための選択ボックス211が表示され、プルダウンメニューにより、異常イベントを選択できるようになっている。この例では、革ベルトの摩耗、チェーンの緩み、及びシール不良が異常イベントとして示され、この中から革ベルトの摩耗が選択されている。
この選択ボックス211の下側には、包装機の概略図と因果関係モデルとが重ねられた異常原因図212が表示されている。図9Aの例では、異常イベントが革ベルトの摩耗であるときの異常原因図が表示されている。そして、この異常原因図212の左下には、選択された異常イベントに応じ、原因要素となる機構とその特徴量とが示されたリスト213が表示されている。ユーザは、このリスト213の中から、いずれかの機構及び特徴量を選択することができ、いずれかを選択すると、異常原因図212の中の対応する機構が強調表示される。この例では、リスト213の中から(サーボ1-トルク平均値)が選択されており、これによって、異常原因図212の中のサーボ1が強調表示される。強調表示は、種々の方法が可能であり、着色、点滅等、他のノードと区別できるように表示されればよい。
さらに、リスト213の左側には、選択された特徴量の経時変化がグラフ214によって表示されている。この例では、(サーボ1-トルク平均値)が選択されているため、その経時的な変化を示す折れ線グラフ214が表示されている。
図9Bは、ボックス211において、チェーンの緩みが異常イベンとして表示された例を示している。これにより、リスト213には、チェーンの緩みの原因要素となる機構と特徴量が表示されている。ここでは、(サーボ4-トルク平均値)が選択されているため、異常原因図212のサーボ4が強調されるとともに、(サーボ4-トルク平均値)の経時的な変化を示す折れ線グラフ214が表示されている。
図9Cは、ボックス211において、シール不良が異常イベンとして表示された例を示している。これにより、リスト213には、シール不良の原因要素となる機構と特徴量が表示されている。ここでは、(サーボ4-トルク平均値)が選択されているため、異常原因図のサーボ4が強調されるとともに、(サーボ4-トルク平均値)の経時的な変化を示す折れ線グラフ214が表示されている。
上記の画面21の操作をまとめると、以下の通りである。まず、ユーザは、入力装置15によって、選択ボックス211から確認を行うべき異常イベントを選択する。これにより、表示制御部113は、選択された異常イベントに対応する異常原因図212及びリスト213を画面に表示する。そして、リスト213から、いずれかの特徴量が選択されると、対応する異常原因図212のノードが強調表示されるとともに、選択された特徴量の経時変化を示すグラフ214が表示される。したがって、ユーザは、この画面21を見ながら、異常イベントに係る因果関係を視認することができる。なお、グラフ214に表示する特徴量の経時変化の期間は、ユーザが適宜設定することができる。
<4.特徴>
(1)本実施形態によれば、包装機3の概略図と、この包装機3において生じ得る異常に係る因果関係モデルと、を表示装置2の画面21に表示するようにしている。このとき、画面21には、概略図と対応するように因果関係モデルが重ねられて表示されるため、因果関係モデルに含まれる原因要素を、概略図を見ながら特定することができる。したがって、包装機3において異常がどこで生じているかを容易に視認することができる。
(1)本実施形態によれば、包装機3の概略図と、この包装機3において生じ得る異常に係る因果関係モデルと、を表示装置2の画面21に表示するようにしている。このとき、画面21には、概略図と対応するように因果関係モデルが重ねられて表示されるため、因果関係モデルに含まれる原因要素を、概略図を見ながら特定することができる。したがって、包装機3において異常がどこで生じているかを容易に視認することができる。
(2)異常イベント毎に原因要素と、それに対応する特徴量とをリスト213として画面21に表示するため、異常を解決するための原因要素と、それを制御する特徴量とを視認することができる。例えば、同じ原因要素であっても、異常によって制御されるべき特徴量が異なることがあるため、リスト213を見ることで、どの特徴量を制御すべきかを容易に知ることができる。
(3)リスト213から原因要素を選択することで、画面21に表示された因果関係モデルの中の原因要素を強調して表示することができる。したがって、ユーザは、例えば、概略図上で選択された原因要素の位置を容易に視認することができる。
<5.変形例>
以上、本発明の実施の形態を詳細に説明してきたが、前述までの説明はあらゆる点において本発明の例示に過ぎない。本発明の範囲を逸脱することなく種々の改良や変形を行うことができることは言うまでもない。例えば、以下のような変更が可能である。なお、以下では、上記実施形態と同様の構成要素に関しては同様の符号を用い、上記実施形態と同様の点については、適宜説明を省略した。以下の変形例は適宜組み合わせ可能である。
以上、本発明の実施の形態を詳細に説明してきたが、前述までの説明はあらゆる点において本発明の例示に過ぎない。本発明の範囲を逸脱することなく種々の改良や変形を行うことができることは言うまでもない。例えば、以下のような変更が可能である。なお、以下では、上記実施形態と同様の構成要素に関しては同様の符号を用い、上記実施形態と同様の点については、適宜説明を省略した。以下の変形例は適宜組み合わせ可能である。
<5-1>
上記実施形態では、画面21に、異常イベントの選択ボックス211、異常原因図212、リスト213、及びグラフ214を表示しているが、これに限定されるものではなく、少なくとも異常原因図212が示されていればよい。例えば、対象となる生産設備によっては、異常イベントが1つの場合もあるため、この場合には、選択ボックス211も不要となる。また、画面21に、全ての要素211~214を表示する必要はなく、これらを複数の画面に分けて表示し、ユーザがこれらを切り替えられるようにしてもよい。
上記実施形態では、画面21に、異常イベントの選択ボックス211、異常原因図212、リスト213、及びグラフ214を表示しているが、これに限定されるものではなく、少なくとも異常原因図212が示されていればよい。例えば、対象となる生産設備によっては、異常イベントが1つの場合もあるため、この場合には、選択ボックス211も不要となる。また、画面21に、全ての要素211~214を表示する必要はなく、これらを複数の画面に分けて表示し、ユーザがこれらを切り替えられるようにしてもよい。
<5-2>
上記実施形態で示した因果関係モデルの構築は、一例であり、その他の方法であってもよい。また、他の装置で構築した概略図データ122や因果関係モデルデータ123を記憶部12に逐次記憶することもできる。
上記実施形態で示した因果関係モデルの構築は、一例であり、その他の方法であってもよい。また、他の装置で構築した概略図データ122や因果関係モデルデータ123を記憶部12に逐次記憶することもできる。
<5-3>
包装機3以外の生産設備においても適用可能であり、その場合には、因果関係モデルを構築するための機構も、生産設備に応じて適宜選択することができる。また、複数の生産設備に係る概略図データを記憶部12に記憶しておき、対応する生産設備ごとに、表示装置2に表示することもできる。
包装機3以外の生産設備においても適用可能であり、その場合には、因果関係モデルを構築するための機構も、生産設備に応じて適宜選択することができる。また、複数の生産設備に係る概略図データを記憶部12に記憶しておき、対応する生産設備ごとに、表示装置2に表示することもできる。
<5-4>
本発明に係る表示システムは、上記生産システムにおける解析装置1と表示装置2により構成することができる。したがって、上記実施形態の表示装置2が本発明の表示部に相当し、解析装置1の制御部11及び記憶部12が、本発明の制御部及び記憶部に相当する。例えば、本発明に係る制御部、記憶部、及び表示部をタブレットPCなどで構成することもできる。
本発明に係る表示システムは、上記生産システムにおける解析装置1と表示装置2により構成することができる。したがって、上記実施形態の表示装置2が本発明の表示部に相当し、解析装置1の制御部11及び記憶部12が、本発明の制御部及び記憶部に相当する。例えば、本発明に係る制御部、記憶部、及び表示部をタブレットPCなどで構成することもできる。
1…解析装置、
11…制御部
12…記憶部、
14…入力装置(入力部)
2…表示装置(表示部)
3…包装機(生産設備)
11…制御部
12…記憶部、
14…入力装置(入力部)
2…表示装置(表示部)
3…包装機(生産設備)
Claims (6)
- 製品を生産する生産設備であって、当該生産設備の駆動を行う少なくとも1つの駆動手段及び前記生産の監視を行う少なくとも1つの監視手段を有する生産設備に設けられる表示システムであって、
制御部と、
表示部と、
記憶部と、
を備え、
前記記憶部は、
前記生産設備の概略図を表す概略図データと、
前記生産設備に生じ得る少なくとも1つの異常の原因要素を、前記駆動手段及び前記監視手段の中から少なくとも1つ選択するとともに、当該原因要素の関係とともに因果関係モデルとして表した因果関係モデルデータと、
を記憶し、
前記制御部は、
前記表示部に、前記概略図と、当該概略図と対応するように、前記因果関係モデルを重ねて表示するように構成されている、表示システム。 - 入力部をさらに備え、
前記記憶部は、複数の前記異常に係る因果関係モデルデータを記憶し、
前記入力部は、前記複数の異常の中から、1つの異常の選択を受け付けるように構成され、
前記制御部は、選択された前記異常に対応する前記因果関係モデルを前記表示部に表示するように構成されている、請求項1に記載の表示システム。 - 前記駆動手段及び監視手段は、制御可能な少なくとも1つの特徴量を有しており、
前記制御部は、前記各異常の原因要素と、当該原因要素に対応する少なくとも1つの前記特徴量とを、リストとして前記表示部に表示する、請求項1または2に記載の表示システム。 - 前記入力部は、前記リストから前記原因要素の1つの選択を受け付け、
前記制御部は、前記表示部に表示された前記因果関係モデルにおいて、選択された前記原因要素を強調して表示するように構成されている、請求項3に記載の表示システム。 - 製品を生産する生産設備であって、当該生産設備の駆動を行う少なくとも1つの駆動手段及び前記生産の監視を行う少なくとも1つの監視手段を有する生産設備において生じ得る異常の因果関係を表示部に表示するための表示方法であって、
前記生産設備の概略図を表す概略図データを記憶するステップと、
前記生産設備における少なくとも1つの異常の原因要素を、前記駆動手段及び前記監視手段の中から少なくとも1つ選択するとともに、当該原因要素の関係とともに因果関係モデルとして表した因果関係モデルデータを記憶するステップと、
前記表示部に、前記概略図と、当該概略図と対応するように、前記因果関係モデルを重ねるように表示するステップと、
を備えている、表示方法。 - 製品を生産する生産設備であって、当該生産設備の駆動を行う少なくとも1つの駆動手段及び前記生産の監視を行う少なくとも1つの監視手段を有する生産設備において生じ得る異常の因果関係を表示部に表示するための表示プログラムであって、
コンピュータに、
前記生産設備の概略図を表す概略図データを記憶するステップと、
前記生産設備における少なくとも1つの異常の原因要素を、前記駆動手段及び前記監視手段の中から少なくとも1つ選択するとともに、当該原因要素の関係とともに因果関係モデルとして表した因果関係モデルデータを記憶するステップと、
前記表示部に、前記概略図と、当該概略図と対応するように、前記因果関係モデルを重ねるように表示するステップと、
を実行させる、表示プログラム。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP20769492.8A EP3940488A4 (en) | 2019-03-13 | 2020-02-03 | ADVERTISING SYSTEM, ADVERTISING METHOD AND ADVERTISING PROGRAM |
| US17/270,445 US20210191380A1 (en) | 2019-03-13 | 2020-02-03 | Display system, display method, and non-transitory computer-readable recording medium recording display program |
| CN202080004380.XA CN112534374A (zh) | 2019-03-13 | 2020-02-03 | 显示系统、显示方法及显示程序 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019-045644 | 2019-03-13 | ||
| JP2019045644A JP2020149289A (ja) | 2019-03-13 | 2019-03-13 | 表示システム、表示方法、及び表示プログラム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2020183973A1 true WO2020183973A1 (ja) | 2020-09-17 |
Family
ID=72426762
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2020/003868 WO2020183973A1 (ja) | 2019-03-13 | 2020-02-03 | 表示システム、表示方法、及び表示プログラム |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20210191380A1 (ja) |
| EP (1) | EP3940488A4 (ja) |
| JP (1) | JP2020149289A (ja) |
| CN (1) | CN112534374A (ja) |
| WO (1) | WO2020183973A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2022254876A1 (ja) * | 2021-06-03 | 2022-12-08 | オムロン株式会社 | 製造ラインの管理装置 |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2022029983A (ja) * | 2020-08-06 | 2022-02-18 | オムロン株式会社 | 表示システム、表示方法、及び表示プログラム |
| WO2022085426A1 (ja) * | 2020-10-21 | 2022-04-28 | 住友電気工業株式会社 | 管理装置、管理方法及びコンピュータプログラム |
| JP7188470B2 (ja) * | 2021-01-28 | 2022-12-13 | 横河電機株式会社 | 分析方法、分析プログラムおよび情報処理装置 |
| JP2022127675A (ja) * | 2021-02-22 | 2022-09-01 | オムロン株式会社 | モデル生成装置、モデル生成方法、モデル生成プログラム、推定装置、推定方法、及び推定プログラム |
| JP2023183878A (ja) * | 2022-06-16 | 2023-12-28 | オムロン株式会社 | 異常判定装置、異常判定方法、及び異常判定プログラム |
Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05147625A (ja) * | 1991-11-20 | 1993-06-15 | Toyo Jidoki Co Ltd | 包装機の異常対策表示装置 |
| JPH08202444A (ja) * | 1995-01-25 | 1996-08-09 | Hitachi Ltd | 機械設備の異常診断方法および装置 |
| JPH11188584A (ja) * | 1997-12-25 | 1999-07-13 | Canon Inc | 稼動管理装置および稼動管理方法、記憶媒体 |
| JPH11242503A (ja) * | 1998-02-25 | 1999-09-07 | Hitachi Ltd | プラント運転制御支援システム |
| JP2005008060A (ja) * | 2003-06-19 | 2005-01-13 | Tsubasa System Co Ltd | 損傷解析支援システム |
| JP2007065934A (ja) * | 2005-08-30 | 2007-03-15 | Fuji Xerox Co Ltd | 故障診断システム、画像形成装置及び故障診断方法 |
| JP2010277199A (ja) | 2009-05-26 | 2010-12-09 | Nippon Steel Corp | 生産システムの設備診断装置および設備診断方法、並びに設備診断プログラムおよびこれを記録したコンピュータ読み取り可能な記録媒体 |
| WO2013047408A1 (ja) * | 2011-09-30 | 2013-04-04 | 住友重機械工業株式会社 | ショベル、ショベル管理装置、及びショベル管理方法 |
| JP2015172945A (ja) | 2009-08-28 | 2015-10-01 | 株式会社日立製作所 | 設備状態監視方法およびその装置 |
| JP2018116545A (ja) * | 2017-01-19 | 2018-07-26 | オムロン株式会社 | 予測モデル作成装置、生産設備監視システム、及び生産設備監視方法 |
| JP2018181021A (ja) * | 2017-04-14 | 2018-11-15 | オムロン株式会社 | 産業用制御装置、制御方法、プログラム、包装機、および包装機用制御装置 |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE60137140D1 (de) * | 2000-10-20 | 2009-02-05 | Daicel Chem | Anlagen steuer-überwachungsvorrichtung |
| JP3699676B2 (ja) * | 2001-11-29 | 2005-09-28 | ダイセル化学工業株式会社 | プラント制御監視装置 |
| EP1734432B1 (en) * | 2004-03-22 | 2011-09-21 | Digital Electronics Corporation | Display apparatus, program for causing a computer to function as the display apparatus and storage medium including the program |
| JP4611180B2 (ja) * | 2005-11-18 | 2011-01-12 | 日東電工株式会社 | エラー表示装置 |
| JP5146648B2 (ja) * | 2007-12-25 | 2013-02-20 | 澁谷工業株式会社 | 生産管理システム |
| WO2015111515A1 (ja) * | 2014-01-21 | 2015-07-30 | 住友重機械工業株式会社 | ショベルの管理装置、及び支援装置 |
| JP6432494B2 (ja) * | 2015-11-30 | 2018-12-05 | オムロン株式会社 | 監視装置、監視システム、監視プログラムおよび記録媒体 |
| JP6837893B2 (ja) * | 2017-03-31 | 2021-03-03 | 住友重機械工業株式会社 | 故障診断システム |
| JP6480625B1 (ja) * | 2018-05-21 | 2019-03-13 | 株式会社日立パワーソリューションズ | 異常予兆診断システムのプリプロセッサ |
-
2019
- 2019-03-13 JP JP2019045644A patent/JP2020149289A/ja active Pending
-
2020
- 2020-02-03 WO PCT/JP2020/003868 patent/WO2020183973A1/ja unknown
- 2020-02-03 CN CN202080004380.XA patent/CN112534374A/zh active Pending
- 2020-02-03 US US17/270,445 patent/US20210191380A1/en active Pending
- 2020-02-03 EP EP20769492.8A patent/EP3940488A4/en not_active Withdrawn
Patent Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05147625A (ja) * | 1991-11-20 | 1993-06-15 | Toyo Jidoki Co Ltd | 包装機の異常対策表示装置 |
| JPH08202444A (ja) * | 1995-01-25 | 1996-08-09 | Hitachi Ltd | 機械設備の異常診断方法および装置 |
| JPH11188584A (ja) * | 1997-12-25 | 1999-07-13 | Canon Inc | 稼動管理装置および稼動管理方法、記憶媒体 |
| JPH11242503A (ja) * | 1998-02-25 | 1999-09-07 | Hitachi Ltd | プラント運転制御支援システム |
| JP2005008060A (ja) * | 2003-06-19 | 2005-01-13 | Tsubasa System Co Ltd | 損傷解析支援システム |
| JP2007065934A (ja) * | 2005-08-30 | 2007-03-15 | Fuji Xerox Co Ltd | 故障診断システム、画像形成装置及び故障診断方法 |
| JP2010277199A (ja) | 2009-05-26 | 2010-12-09 | Nippon Steel Corp | 生産システムの設備診断装置および設備診断方法、並びに設備診断プログラムおよびこれを記録したコンピュータ読み取り可能な記録媒体 |
| JP2015172945A (ja) | 2009-08-28 | 2015-10-01 | 株式会社日立製作所 | 設備状態監視方法およびその装置 |
| WO2013047408A1 (ja) * | 2011-09-30 | 2013-04-04 | 住友重機械工業株式会社 | ショベル、ショベル管理装置、及びショベル管理方法 |
| JP2018116545A (ja) * | 2017-01-19 | 2018-07-26 | オムロン株式会社 | 予測モデル作成装置、生産設備監視システム、及び生産設備監視方法 |
| JP2018181021A (ja) * | 2017-04-14 | 2018-11-15 | オムロン株式会社 | 産業用制御装置、制御方法、プログラム、包装機、および包装機用制御装置 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP3940488A4 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2022254876A1 (ja) * | 2021-06-03 | 2022-12-08 | オムロン株式会社 | 製造ラインの管理装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3940488A1 (en) | 2022-01-19 |
| CN112534374A (zh) | 2021-03-19 |
| JP2020149289A (ja) | 2020-09-17 |
| EP3940488A4 (en) | 2022-11-23 |
| US20210191380A1 (en) | 2021-06-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2020183973A1 (ja) | 表示システム、表示方法、及び表示プログラム | |
| US11106197B2 (en) | Prediction model creation apparatus, production facility monitoring system, and production facility monitoring method | |
| WO2022030568A1 (ja) | 表示システム、表示方法、及び表示プログラム | |
| WO2020183975A1 (ja) | 表示システム | |
| EP2987735A1 (en) | Electronic control of metered film dispensing in a wrapping apparatus | |
| WO2020183974A1 (ja) | 表示システム | |
| CN105539948A (zh) | 控制装置、系统及库程序 | |
| WO2022030567A1 (ja) | 表示システム、表示方法、及び表示プログラム | |
| JP2018177268A (ja) | 包装機 | |
| IT201900007201A1 (it) | Macchina confezionatrice di prodotti per preparati alimentari versabili | |
| CN114126971A (zh) | 用于液体食品的包装机器中的状态监测 | |
| US11078041B2 (en) | Monitoring method for monitoring an unwinding process, unwinding device and unwinding system | |
| WO2021044500A1 (ja) | 異常に対する処理の支援装置 | |
| WO2021053782A1 (ja) | 生産設備に生じ得る事象の解析装置 | |
| EP4286822A1 (en) | Virtual sensing system for condition monitoring of a container packaging machine | |
| JP6459686B2 (ja) | 制御装置、システム、およびライブラリプログラム | |
| WO2022176760A1 (ja) | モデル生成装置、モデル生成方法、モデル生成プログラム、推定装置、推定方法、及び推定プログラム | |
| WO2024030537A1 (en) | Systems and methods for monitoring and controlling industrial processes | |
| WO2022063373A1 (en) | Optical assessment of packaging film welds |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 20769492 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2020769492 Country of ref document: EP Effective date: 20211013 |