WO2020161853A1 - 映像刺激提示制御装置 - Google Patents
映像刺激提示制御装置 Download PDFInfo
- Publication number
- WO2020161853A1 WO2020161853A1 PCT/JP2019/004398 JP2019004398W WO2020161853A1 WO 2020161853 A1 WO2020161853 A1 WO 2020161853A1 JP 2019004398 W JP2019004398 W JP 2019004398W WO 2020161853 A1 WO2020161853 A1 WO 2020161853A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- virtual object
- stimulus
- vehicle
- operator
- image
- Prior art date
Links
Images











Classifications
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63F—CARD, BOARD, OR ROULETTE GAMES; INDOOR GAMES USING SMALL MOVING PLAYING BODIES; VIDEO GAMES; GAMES NOT OTHERWISE PROVIDED FOR
- A63F13/00—Video games, i.e. games using an electronically generated display having two or more dimensions
- A63F13/25—Output arrangements for video game devices
- A63F13/28—Output arrangements for video game devices responding to control signals received from the game device for affecting ambient conditions, e.g. for vibrating players' seats, activating scent dispensers or affecting temperature or light
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63F—CARD, BOARD, OR ROULETTE GAMES; INDOOR GAMES USING SMALL MOVING PLAYING BODIES; VIDEO GAMES; GAMES NOT OTHERWISE PROVIDED FOR
- A63F13/00—Video games, i.e. games using an electronically generated display having two or more dimensions
- A63F13/50—Controlling the output signals based on the game progress
- A63F13/53—Controlling the output signals based on the game progress involving additional visual information provided to the game scene, e.g. by overlay to simulate a head-up display [HUD] or displaying a laser sight in a shooting game
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T19/00—Manipulating 3D models or images for computer graphics
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09B—EDUCATIONAL OR DEMONSTRATION APPLIANCES; APPLIANCES FOR TEACHING, OR COMMUNICATING WITH, THE BLIND, DEAF OR MUTE; MODELS; PLANETARIA; GLOBES; MAPS; DIAGRAMS
- G09B9/00—Simulators for teaching or training purposes
- G09B9/02—Simulators for teaching or training purposes for teaching control of vehicles or other craft
- G09B9/04—Simulators for teaching or training purposes for teaching control of vehicles or other craft for teaching control of land vehicles
Abstract
従来とは異なる態様で映像と現実のビークルを利用することにより、ユーザに新たな仮想的体験を提供することができる映像刺激提示装置に用いられる映像刺激提示制御装置を提供する。映像刺激提示制御装置は、現実ビークルデータと仮想物体データに基づいて、仮想物体映像データを取得し、現実のビークルを操縦しているオペレータが見ている現実の光景に仮想物体の映像が重ねて提示されるように、仮想物体映像データを映像刺激提示装置に出力する。映像刺激提示制御装置は、現実ビークルデータと仮想物体データに基づいて、相対位置関係刺激に関するデータを含む仮想物体現実ビークル刺激データを取得し、相対位置関係刺激が現実の光景に重ねて提示されている仮想物体の映像を見ながら現実のビークルを操縦しているオペレータに対して付与されるように、仮想物体現実ビークル刺激データを映像刺激提示装置に出力する。
Description
本発明は、現実のビークルを操縦しているオペレータに対して仮想的な体験を提供する映像刺激提示装置に用いられ、当該映像刺激提示装置が現実のビークルを操縦しているオペレータに提示する映像及び刺激を制御する映像刺激提示制御装置に関する。
従来、映像情報に応じた感覚又は運動をユーザに提示することにより、新たな仮想的体験を提供するバーチャルリアリティシステム(以下、VRシステム)が知られている。このようなVRシステムは、例えば、特開2017-102401号公報に開示されている。
上記VRシステムは、映像情報に応じた感覚又は運動をユーザに提示するためのモーションプラットフォーム(以下、MP)として、車両を利用する。上記VRシステムは、バーチャル空間を表す映像情報に基づいてユーザに映像を提示する映像提示手段と、バーチャル空間を表す映像情報に基づいて車両内のユーザに感覚又は運動を提示するように車両の一部を駆動制御する制御手段とを備える。
上記VRシステムにおいて、映像情報に応じた感覚又は運動をユーザに提示するためのMPとしての車両は、現実の車両である。上記VRシステムに用いられる車両は、車両モード又はVRシステムモードにて駆動される。車両モードとVRシステムモードの切替は、ユーザの操作によって実現される。上記VRシステムに用いられる車両は、車両モードでは通常の車両として利用され、VRシステムモードではMPとして利用される。
上記VRシステムにおいて、ユーザは、映像提示手段であるヘッドマウントディスプレイ(以下、HMD)を装着してMPである車両に乗る。上記VRシステムは、HMDによりバーチャル空間の映像をユーザに提示する。つまり、HMDを装着したユーザは、バーチャル空間の映像だけを見ている。
上記VRシステムは、HMDによりバーチャル空間の映像をユーザに提示するときに、ユーザが乗っている車両をMPとして利用する。具体的には、ユーザが乗っている車両の一部を駆動制御することにより、ユーザにバーチャル空間の映像に応じた感覚又は運動を提示する。
上記VRシステムでは、ユーザに新たな仮想的体験を提供するために、バーチャル空間の映像と現実の車両とを利用している。これとは異なる態様で映像と現実のビークルとを利用して、高い現実感覚を有する新たな仮想的体験をシンプルな制御でユーザに提供することが求められている。
本発明の目的は、従来とは異なる態様で映像と現実のビークルを利用することにより、高い現実感覚を有する新たな仮想的体験をユーザに提供することができる映像刺激提示装置に用いられ、当該映像刺激提示装置がユーザに提供する新たな仮想的体験をシンプルに制御することができる映像刺激提示制御装置を提供することである。
本発明の一実施形態に係る映像刺激提示制御装置は、現実のビークルを操縦しているオペレータに対して仮想的な体験を提供するために電気的に作り出した映像と当該映像に関連する刺激とを提示する映像刺激提示装置に用いられ、映像刺激提示装置が提示する映像と刺激を制御する。
映像刺激提示制御装置は、仮想物体データ取得部と、現実ビークルデータ取得部と、仮想物体映像データ取得部と、仮想物体映像データ出力部と、仮想物体現実ビークル刺激データ取得部と、仮想物体現実ビークル刺激データ出力部とを備える。
仮想物体データ取得部は、仮想物体データを取得する。仮想物体データは、仮想物体の種類及び形状に関するデータを含む。仮想物体は、現実のビークルを操縦しているオペレータが見ている現実の光景の中に存在しない物体である。
現実ビークルデータ取得部は、現実ビークルデータを取得する。現実ビークルデータは、現実のビークルと仮想物体との相対的な位置関係に関するデータを含む。
仮想物体映像データ取得部は、現実ビークルデータ取得部によって取得された現実ビークルデータおよび仮想物体データ取得部によって取得された仮想物体データに基づいて、仮想物体映像データを取得する。仮想物体映像データは、現実のビークルとの相対的な位置が考慮された仮想物体の映像に関するデータである。
仮想物体映像データ出力部は、現実のビークルを操縦しているオペレータが見ている現実の光景に仮想物体の映像が重ねて提示されるように、仮想物体映像データを映像刺激提示装置に出力する。
仮想物体現実ビークル刺激データ取得部は、現実ビークルデータ取得部によって取得された現実ビークルデータおよび仮想物体データ取得部によって取得された仮想物体データに基づいて、仮想物体現実ビークル刺激データを取得する。仮想物体現実ビークル刺激データは、相対位置関係刺激に関するデータを含む。相対位置関係刺激は、仮想物体と現実のビークルとの相対的な位置関係に基づく刺激であって、現実のビークルを操縦しているオペレータに付与するための刺激である。
仮想物体現実ビークル刺激データ出力部は、相対位置関係刺激が現実のビークルを操縦しているオペレータに対して付与されるように、仮想物体現実ビークル刺激データを映像刺激提示装置に出力する。
上記映像刺激提示制御装置が用いられる映像刺激提示装置によれば、現実のビークルを操縦しているオペレータに対して、高い現実感覚を有する新たな仮想的体験を提供することができる。具体的には、以下のとおりである。
現実のビークルを操縦しているオペレータは、現実のビークルとの相対的な位置が考慮された仮想物体の映像を現実の光景の中に見ることができる。つまり、現実のビークルを操縦しているオペレータは、制御された仮想物体の映像を現実の光景の中に見ることができる。
現実のビークルを操縦しているオペレータは、現実のビークルを操縦しているときに、現実のビークルを操縦していることによって刺激を受けている。また、現実のビークルを操縦しているオペレータは、現実のビークルを操縦しているときに、現実のビークルを操縦していることによって受けている刺激に加えて、仮想物体と現実のビークルとの相対的な位置関係に基づく刺激である相対位置関係刺激を受けることができる。
したがって、上記映像刺激提示制御装置が用いられる映像刺激提示装置によれば、現実のビークルを操縦しているオペレータに対して、高い現実感覚を有する新たな仮想的体験を提供することができる。
また、上記映像刺激提示制御装置によれば、現実のビークルを操縦しているオペレータに対して高い現実感覚を有する新たな仮想的体験を提供する際の制御をシンプルにすることができる。具体的には、以下のとおりである。
仮想的な体験を提供するために現実のビークルを操縦しているオペレータに対して提示される映像とその映像に関連させる刺激は、仮想物体の映像と、その仮想物体と現実のビークルとの相対的な位置関係に基づく相対位置関係刺激である。また、映像刺激提示制御装置が関連させる映像と刺激は、仮想物体の映像と、その仮想物体と現実のビークルとの相対的な位置関係に基づく相対位置関係刺激である。
このように、本発明の一実施形態に係る映像刺激提示制御装置が関連させる映像と刺激は、オペレータが見ている光景を全て仮想空間の映像とし、その映像とオペレータが受ける全ての刺激とを関連させる従来の映像刺激提示制御装置が制御するものより少なくて済む。つまり、仮想物体の映像は、オペレータが見ている光景を全て仮想空間の映像とした場合に比べて、少ない処理負担で提供することができる。また、オペレータは現実のビークルを操縦することで刺激に対して敏感になっており、現実のビークルを操縦しているオペレータに付与する刺激は少なくてもよいので、刺激の付与に伴う処理負担を軽減することができる。そのため、映像刺激提示制御装置が行う制御をシンプルな制御にすることができる。
本発明の一実施形態に係る映像刺激提示制御装置は、映像刺激提示装置が提示する映像と刺激を制御するものであれば、特に限定されない。映像刺激提示制御装置は、例えば、IC(Integrated Circuit)、電子部品、回路基板等の組み合わせによって実現される。
本発明の一実施形態に係る映像刺激提示制御装置は、例えば、映像刺激提示装置に設けられていてもよいし、映像刺激提示装置以外の装置に設けられていてもよい。また、映像刺激提示制御装置を複数の装置で構成し、当該複数の装置を分散して設けてもよい。映像刺激提示制御装置を構成する複数の装置を分散して設ける場合、映像刺激提示制御装置を構成する複数の装置の少なくとも1つは、例えば、サーバによって実現してもよい。
本発明の一実施形態に係る映像刺激提示制御装置において、現実ビークルデータ取得部、仮想物体データ取得部、仮想物体映像データ取得部、仮想物体映像データ出力部、仮想物体現実ビークル刺激データ取得部、及び、仮想物体現実ビークル刺激データ出力部の各々は、例えば、CPU(Central Processing Unit)が不揮発性のメモリに記憶されたプログラムを読み出し、当該プログラムに従って所定の処理を実行すること等によって実現される。
本発明の一実施形態に係る映像刺激提示制御装置が用いられる映像刺激提示装置は、現実のビークルを操縦しているオペレータに対して仮想的な体験を提供するために電気的に作り出した映像と当該映像に関連する刺激とを提示するものであれば、特に限定されない。
映像刺激提示装置は、例えば、映像を提示する映像提示部と、映像に関連する刺激を提示する刺激提示部とを含む。映像提示部は、現実のビークルを操縦しているオペレータが見ている現実の光景に仮想物体の映像を重ねて提示することができるものであれば、特に限定されない。刺激提示部は、現実のビークルを操縦しているオペレータに対して相対位置関係刺激を付与することができるものであれば、特に限定されない。刺激提示部は、現実のビークルを操縦しているオペレータに付与する刺激に応じた構造を有していればよい。映像提示部と刺激提示部は、例えば、同じ装置を用いて実現してもよいし、別々の装置を用いて実現してもよい。映像提示部は、例えば、現実のビークルを操縦しているオペレータに接触した状態で使用されるものであってもよい。刺激提示部によってオペレータに提示される刺激がオペレータの触覚を刺激するものである場合、刺激提示部は、例えば、現実のビークルを操縦しているオペレータに接触した状態で使用されるものであってもよい。このような刺激提示部は、例えば、オペレータが操縦している現実のビークルの一部を用いて実現してもよい。映像提示部による映像の提示と刺激提示部による刺激の提示とを関連させるには、例えば、映像提示部が映像を提示するタイミングと刺激提示部が刺激を提示するタイミングとを調整すればよい。映像提示部が映像を提示するタイミングと刺激提示部が刺激を提示するタイミングとを調整するには、例えば、映像提示部と刺激提示部との間で信号をやりとりすればよい。
映像刺激提示装置は、オペレータが操縦する現実のビークルの少なくとも一部を含んでいてもよい。この場合、仮想物体現実ビークル刺激データ出力部は、相対位置関係刺激が現実のビークルを操縦しているオペレータに対して現実のビークルの少なくとも一部を介して付与されるように、仮想物体現実ビークル刺激データを映像刺激提示装置に出力してもよい。
このような態様においては、オペレータが操縦している現実のビークルを介して、相対位置関係刺激がオペレータに付与される。そのため、相対位置関係刺激をオペレータに感じさせやすくなる。その理由は、以下のとおりである。
現実のビークルを操縦しているオペレータは、現実のビークルを操縦しているときに、現実のビークルを操縦していることによる刺激を感じ取っている。そのため、現実のビークルを操縦しているオペレータは、現実のビークルを操縦しているときには、刺激に対して敏感になっている。このように刺激に対して敏感になっているオペレータに相対位置関係刺激を付与すれば、オペレータは現実のビークルを操縦していることによる刺激に加えて付与される相対位置関係刺激についても感じ取りやすくなる。したがって、オペレータが操縦している現実のビークルを介して相対位置関係刺激がオペレータに付与されるようにすれば、相対位置関係刺激をオペレータに感じさせやすくなる。
電気的に作り出した映像は、電気的変換によって再現した映像である。別の表現をすれば、電気的に作り出した映像は、電気信号に基づいて生成される映像である。電気的に作り出した映像は、現実の光景に重ね合わせて提示することができるものであれば、特に限定されない。
映像が提示されるタイミングと刺激が提示されるタイミングは、ずれていてもよい。映像に関連する刺激は、現実のビークルを操縦しているオペレータが認識できるものであればよい。映像に関連する刺激は、複数回に亘って付与されてもよい。複数回に亘って付与される刺激は、互いに異なるものであってもよい。
本発明の一実施形態に係る映像刺激提示制御装置において、現実ビークルデータ取得部は、現実ビークルデータを取得するものであれば、特に限定されない。現実ビークルデータは、現実のビークルと仮想物体との相対的な位置関係に関するデータを含むものであれば、特に限定されない。
現実ビークルデータ取得部が現実のビークルと仮想物体との相対的な位置関係に関するデータを取得する態様は、特に限定されない。
現実ビークルデータ取得部は、例えば、仮想物体の出現位置と現実のビークルの現在位置とに基づいて、現実のビークルと仮想物体との相対的な位置関係を取得してもよい。
現実のビークルの現在位置は、例えば、現実のビークルの位置情報を取得可能な装置を用いて取得してもよい。現実のビークルの位置情報を取得可能な装置は、例えば、現実のビークルに設けてもよいし、現実のビークルを操縦しているオペレータが所持していてもよい。現実のビークルの位置情報を取得可能な装置が現実のビークルを操縦しているオペレータによって所持される態様には、現実のビークルの位置情報を取得可能な装置が現実のビークルを操縦しているオペレータに装着される態様を含む。現実のビークルの位置情報を取得可能な装置は、例えば、GPS受信機である。
現実のビークルの位置情報は、GPSを利用せずに取得してもよい。例えば、現実のビークルが走行する路面を私有地内に形成する場合、当該私有地内に配置された複数のアンテナからの信号を受信可能な装置を用いて、現実のビークルの位置情報を取得してもよい。
また、現実ビークルデータ取得部は、現実のビークルを操縦しているオペレータに装着されたカメラによって撮影された仮想物体の出現位置を含む画像に基づいて、現実のビークルと仮想物体との相対的な位置関係を取得してもよい。カメラによって撮影された画像内での仮想物体の出現位置や当該画像の画素数等を利用すれば、現実のビークルの現在位置から仮想物体の出現位置までの距離と、現実のビークルの現在位置から見た仮想物体の出現位置の方向が判るので、現実のビークルと仮想物体との相対的な位置関係を取得することができる。
現実ビークルデータは、現実のビークルの形状に関するデータを含んでいてもよい。現実ビークルデータ取得部が現実のビークルの形状に関するデータを取得する態様は、特に限定されない。現実ビークルデータ取得部は、例えば、メモリに格納された現実のビークルの形状に関するデータを読み出すことにより、現実のビークルの形状に関するデータを取得してもよい。現実のビークルの形状に関するデータを格納するメモリは、映像刺激提示制御装置に設けられたものであってもよいし、映像刺激提示制御装置以外の装置に設けられたものであってもよい。
現実のビークルの形状に関するデータは、現実のビークルと仮想物体との相対的な位置関係を導き出すために用いることができるものであれば、特に限定されない。現実のビークルの形状に関するデータは、例えば、現実のビークルの平面形状に関するものであってもよいし、現実のビークルの立体形状に関するものであってもよい。現実のビークルの平面形状は、例えば、現実のビークルを上から見た形状に関するものであってもよいし、現実のビークルを前後左右の何れかから見た形状に関するものであってもよい。
現実のビークルは、オペレータが操縦可能なものであれば、特に限定されない。現実のビークルは、例えば、地上を移動可能なビークルであってもよいし、水上又は水中を移動可能なビークルであってもよいし、空中を移動可能なビークルであってもよい。地上を移動可能なビークルは、例えば、車両である。車両は、例えば、少なくとも1つの車輪を備える。水上又は水中を移動可能なビークルは、例えば、船である。空中を移動可能なビークルは、例えば、飛行機である。映像刺激提示装置が刺激提示部を含みかつ当該刺激提示部が現実のビークルの一部を用いて実現される場合、現実のビークルは、映像刺激提示制御装置からの信号によって制御される。このような現実のビークルは、例えば、電動ビークルによって実現される。電動ビークルは、電力供給源からの電力供給に基づいて推進力を得るものであれば、特に限定されない。
本発明の一実施形態に係る映像刺激提示制御装置において、仮想物体データ取得部は、仮想物体データを取得するものであれば、特に限定されない。仮想物体データ取得部が仮想物体データを取得する態様は、特に限定されない。仮想物体データ取得部は、例えば、メモリに格納された仮想物体データを読み出すことにより、仮想物体データを取得してもよい。仮想物体データが格納されたメモリは、映像刺激提示制御装置に設けられたものであってもよいし、映像刺激提示制御装置以外の装置に設けられたものであってもよい。
仮想物体は、現実のビークルを操縦しているオペレータが見ている現実の光景の中に存在しない物体であれば、特に限定されない。現実の光景は、例えば、現実のビークルを操縦しているオペレータの周囲の光景である。現実の光景は、例えば、現実のビークルを操縦しているオペレータが直接見るものであってもよいし、現実のビークルを操縦しているオペレータに装着されたカメラが撮影する画像(オペレータの周囲を撮影した画像)が表示された画面を介してオペレータが見るものであってもよい。仮想物体は、例えば、固体であってもよいし、液体であってもよいし、気体であってもよいし、固体と液体と気体のうちの少なくとも2つを組み合わせたものであってもよい。仮想物体は、例えば、当該仮想物体と現実のビークルとの相対的な位置関係に基づく刺激についての情報を提示する機能を有していてもよい。
仮想物体データは、仮想物体の形状に関するデータを含むものであれば、特に限定されない。仮想物体の形状に関するデータは、例えば、仮想物体の平面形状に関するものであってもよいし、仮想物体の立体形状に関するものであってもよい。仮想物体の平面形状は、例えば、仮想物体を上から見た形状に関するものであってもよいし、仮想物体を前後左右の何れかから見た形状に関するものであってもよい。
本発明の一実施形態に係る映像刺激提示制御装置において、仮想物体映像データ取得部は、現実ビークルデータ取得部によって取得された現実ビークルデータおよび仮想物体データ取得部によって取得された仮想物体データに基づいて、仮想物体映像データを取得するものであれば、特に限定されない。
仮想物体映像データ取得部が仮想物体映像データを取得する態様は、特に限定されない。仮想物体映像データ取得部は、例えば、現実ビークルデータ取得部が取得した現実ビークルデータと仮想物体データ取得部が取得した仮想物体データから仮想物体映像データを生成して取得してもよい。具体的には、現実ビークルデータ取得部が取得した現実ビークルデータに含まれる現実のビークルと仮想物体との相対的な位置関係を示すデータに基づいて仮想物体の見え方を決定し、当該見え方に対応する仮想物体の映像に関するデータを生成して取得してもよい。
仮想物体映像データは、現実のビークルとの相対的な位置が考慮された仮想物体の映像に関するデータであれば、特に限定されない。現実のビークルとの相対的な位置が考慮された仮想物体の映像は、例えば、現実のビークルとの相対的な位置関係に応じた見え方をするように提示される仮想物体の映像である。つまり、仮想物体の映像は、現実のビークルとの相対的な位置関係に応じて変化する。
本発明の一実施形態に係る映像刺激提示制御装置において、仮想物体映像データ出力部は、現実のビークルを操縦しているオペレータが見ている現実の光景に仮想物体の映像が重ねて提示されるように、仮想物体映像データを映像刺激提示装置に出力するものであれば、特に限定されない。現実のビークルを操縦しているオペレータが見ている現実の光景に仮想物体の映像が重ねて提示されることにより、現実のビークルを操縦しているオペレータが現実の光景と仮想物体の映像を同時に見ることができる。
本発明の一実施形態に係る映像刺激提示制御装置において、仮想物体現実ビークル刺激データ取得部は、現実ビークルデータ取得部によって取得された現実ビークルデータおよび仮想物体データ取得部によって取得された仮想物体データに基づいて、仮想物体現実ビークル刺激データを取得するものであれば、特に限定されない。
仮想物体現実ビークル刺激データ取得部が仮想物体現実ビークル刺激データを取得する態様は、特に限定されない。仮想物体現実ビークル刺激データ取得部は、例えば、参照テーブルを用いることにより、現実ビークルデータ取得部が取得した現実ビークルデータと仮想物体データ取得部が取得した仮想物体データに対応する仮想物体現実ビークル刺激データを取得してもよい。
仮想物体現実ビークル刺激データは、相対位置関係刺激に関するデータを含むものであれば、特に限定されない。相対位置関係刺激は、仮想物体と現実のビークルとの相対的な位置関係に基づく刺激であって、現実のビークルを操縦しているオペレータに付与するための刺激であれば、特に限定されない。
仮想物体と現実のビークルとの相対的な位置関係に基づく刺激は、例えば、仮想物体と現実のビークルとの相対的な位置関係を示す刺激であってもよいし、仮想物体と現実のビークルとの相対的な位置関係に起因して付与される刺激であってもよい。仮想物体と現実のビークルとの相対的な位置関係に起因して付与される刺激は、仮想物体と現実のビークルとの相対的な位置関係に起因して行われる現実のビークルへの制御により、現実のビークルを介して現実のビークルのオペレータに付与されるものを含む。
相対位置関係刺激は、例えば、現実のビークルを操縦しているオペレータの五感である視覚、聴覚、触覚、臭覚及び味覚のうちの複数の感覚を刺激するものであってもよい。この場合、オペレータの五感のうち複数の感覚が刺激されるので、オペレータはより刺激を受け易くなる。
相対位置関係刺激は、例えば、現実のビークルを操縦しているオペレータの触覚を刺激するものを含むものであってもよい。この場合、オペレータの触覚が刺激されるので、オペレータはより刺激を受け易くなる。
相対位置関係刺激は、例えば、オペレータが現実のビークルを操縦しているときに受ける刺激よりも小さくてもよい。この場合、相対位置関係刺激をオペレータに付与するための制御において処理の負担が軽減される。その結果、相対位置関係刺激をオペレータに付与するための制御がシンプルになる。
相対位置関係刺激がオペレータの視覚を刺激するように付与される態様には、例えば、現実のビークルと仮想物体との相対的な位置関係に応じた映像を表示する態様や、現実のビークルと仮想物体との相対的な位置関係に応じて仮想物体の映像を変化させる態様等が含まれる。
相対位置関係刺激がオペレータの聴覚を刺激するように付与される態様には、例えば、現実のビークルと仮想物体との相対的な位置関係に応じた音声を出力する態様や、現実のビークルを仮想物体との相対的な位置関係に応じて出力される音声を変化させる態様等が含まれる。
相対位置関係刺激がオペレータの触覚を刺激するように付与される態様には、例えば、現実のビークルと仮想物体との相対的な位置関係に応じて、オペレータの身体に及ぼされる力の大きさや力が及ぼされる方向を変化させる態様等が含まれる。オペレータの身体に及ぼされる力の大きさを変化させる態様には、例えば、オペレータの皮膚に力が及ぼされていない状態からオペレータの皮膚に力を及ぼす態様が含まれる。
相対位置関係刺激がオペレータの嗅覚を刺激するように付与される態様には、例えば、現実のビークルと仮想物体との相対的な位置関係に応じて匂いを変化させる態様等が含まれる。匂いを変化させる態様には、例えば、オペレータが刺激として付与される匂いを嗅いでいない状態から当該匂いを嗅いでいる状態に変化させる態様が含まれる。
相対位置関係刺激がオペレータの味覚を刺激するように付与される態様には、例えば、現実のビークルと仮想物体との相対的な位置関係に応じて味を変化させる態様等が含まれる。味を変化させる態様には、例えば、オペレータが刺激として付与される味を感じていない状態から当該味を感じている状態に変化させる態様が含まれる。
本発明の一実施形態に係る映像刺激提示制御装置において、仮想物体現実ビークル刺激データ出力部は、相対位置関係刺激が現実のビークルを操縦しているオペレータに対して付与されるように、仮想物体現実ビークル刺激データを映像刺激提示装置に出力するものであれば、特に限定されない。現実のビークルを操縦しているオペレータに対して相対位置関係刺激が付与されることにより、現実のビークルを操縦しているオペレータは、現実のビークルを操縦することで受ける刺激に加えて、仮想物体と現実のビークルとの相対的な位置関係に基づく刺激である相対位置関係刺激を受けることができる。
この発明の上述の目的及びその他の目的、特徴、局面及び利点は、添付図面に関連して行われる以下のこの発明の実施形態の詳細な説明から一層明らかとなろう。
本明細書にて使用される場合、用語「及び/又は(and/or)」は1つの、又は複数の関連した列挙されたアイテム(items)のあらゆる又は全ての組み合わせを含む。
本明細書中で使用される場合、用語「含む、備える(including)」、「含む、備える(comprising)」又は「有する(having)」及びその変形の使用は、記載された特徴、工程、操作、要素、成分及び/又はそれらの等価物の存在を特定するが、ステップ、動作、要素、コンポーネント、及び/又はそれらのグループのうちの1つ又は複数を含むことができる。
他に定義されない限り、本明細書で使用される全ての用語(技術用語及び科学用語を含む)は、本発明が属する当業者によって一般的に理解されるのと同じ意味を有する。
一般的に使用される辞書に定義された用語のような用語は、関連する技術及び本開示の文脈における意味と一致する意味を有すると解釈されるべきであり、本明細書で明示的に定義されていない限り、理想的又は過度に形式的な意味で解釈されることはない。
本発明の説明においては、技術及び工程の数が開示されていると理解される。これらの各々は個別の利益を有し、それぞれは、他の開示された技術の1つ以上、又は、場合によっては全てと共に使用することもできる。従って、明確にするために、この説明は、不要に個々のステップの可能な組み合わせの全てを繰り返すことを控える。それにもかかわらず、明細書及び特許請求の範囲は、そのような組み合わせが全て本発明及び特許請求項の範囲内にあることを理解して読まれるべきである。
以下の説明では、説明の目的で、本発明の完全な理解を提供するために多数の具体的な詳細を述べる。しかしながら、当業者には、これらの特定の詳細なしに本発明を実施できることが明らかである。本開示は、本発明の例示として考慮されるべきであり、本発明を以下の図面又は説明によって示される特定の実施形態に限定することを意図するものではない。
本発明によれば、従来とは異なる態様で映像と現実のビークルを利用することにより、ユーザに新たな仮想的体験を提供することができる映像刺激提示装置に用いられる映像刺激提示制御装置を提供することができる。
以下、図面を参照しながら、本発明の実施の形態による映像刺激提示制御装置の詳細について説明する。なお、以下に説明する実施の形態は、あくまでも一例である。本発明は、以下に説明する実施の形態によって、何等、限定的に解釈されるものではない。
図1を参照しながら、本発明の実施の形態による映像刺激提示制御装置10について説明する。図1は、映像刺激提示制御装置10を示すブロック図と、現実のビークルRVを操縦しているオペレータOPが見る光景の一例を説明するための説明図とを併せて示す図面である。
映像刺激提示制御装置10は、映像刺激提示装置20に用いられる。映像刺激提示装置20は、現実のビークルRVを操縦しているオペレータOPに対して仮想的な体験を提示するために、電気的に作り出した映像と当該映像に関連する刺激とをオペレータOPに提示する。
ここで、現実のビークルRVは、オペレータOPが操縦可能なものであれば、特に限定されない。現実のビークルRVは、例えば、地上を移動可能なビークルであってもよいし、水上又は水中を移動可能なビークルであってもよいし、空中を移動可能なビークルであってもよい。地上を移動可能なビークルは、例えば、車両である。車両は、例えば、少なくとも1つの車輪を備える。水上又は水中を移動可能なビークルは、例えば、船である。空中を移動可能なビークルは、例えば、飛行機である。
本実施の形態では、現実のビークルRVは、電動ビークルである。電動ビークルは、電力供給源からの電力供給に基づいて推進力を得るものであれば、特に限定されない。電動ビークルは、例えば、映像刺激提示制御装置10からの信号に基づく制御が可能な構成を有する。つまり、映像刺激提示制御装置10からの信号に基づく制御が可能な構成を有する電動ビークルは、電動ビークルを操縦しているオペレータに刺激を付与することができる。
先ず、映像刺激提示制御装置10が用いられる映像刺激提示装置20について説明する。映像刺激提示装置20は、映像提示部22と、刺激提示部24とを含む。
映像提示部22は、現実のビークルRVを操縦しているオペレータOPに対して仮想的な体験を提示するために、電気的に作り出した映像を提示する。電気的に作り出した映像は、電気信号に基づいて生成される映像である。
映像提示部22は、電気的に作り出した映像を、現実のビークルRVを運転しているオペレータOPが見ている現実の光景に重ねて提示する。現実の光景は、例えば、現実のビークルRVを操縦しているオペレータOPの周囲の光景である。
映像提示部22は、現実のビークルRVを運転しているオペレータOPが見ている現実の光景に対して電気的に作り出した映像を重ねて提示するために、例えば、可視光線に対して透明であって、かつ、電気的に作り出した映像を表示可能な表示画面を含む。このような表示画面を映像提示部22が有することにより、現実のビークルRVを運転しているオペレータOPは、現実の光景と電気的に作り出した映像とを同時に見ることができる。
映像提示部22は、現実のビークルRVを運転しているオペレータRVの視界の一部に、電気的に作り出した映像を提示する。つまり、現実のビークルRVを運転しているオペレータOPの視界には、現実のビークルRVを運転しているオペレータRVが見ている現実の光景と、映像提示部22が提示する映像(電気的に作り出した映像)とが共存する。別の表現をすれば、現実のビークルRVを運転しているオペレータOPに映像提示部22が電気的に作り出した映像を提示しているときであっても、オペレータOPが見ている光景の全てが映像ではない。
映像提示部22が現実のビークルRVを運転しているオペレータOPに提示する映像は、仮想物体VOの映像である。仮想物体VOは、現実のビークルRVを操縦しているオペレータOPが見ている現実の光景の中に存在しない物体であれば、特に限定されない。なお、仮想物体VOの映像の詳細については、後述する。
映像刺激提示装置20は、映像提示部22として機能する装置を含む。映像提示部22として機能する装置は、例えば、現実のビークルRVを操縦しているオペレータOPが装着した状態で使用される。別の表現をすれば、現実のビークルRVを操縦しているオペレータOPに接触した状態で使用される。本実施の形態では、映像提示部22として機能する装置は、現実のビークルRVを操縦しているオペレータOPが装着する光透過型ヘッドマウントディスプレイHMDである。
光透過型ヘッドマウントディスプレイHMDは、例えば、現実のビークルRVを運転しているオペレータOPが見ている現実の光景に対して電気的に作り出した映像を重ねて提示するために、可視光線を透過可能であって、かつ、電気的に作り出した映像を表示可能な表示画面を有する。このような表示画面は、例えば、現実のビークルRVを運転しているオペレータOPが光透過型ヘッドマウントディスプレイHMDを装着している状態で、現実のビークルRVを運転しているオペレータOPの目の前に配置される。
刺激提示部24は、現実のビークルRVを操縦しているオペレータOPに対して仮想的な体験を提示するために、電気的に作り出した映像に関連する刺激を、現実のビークルRVを操縦しているオペレータに付与する。つまり、刺激提示部24は、現実のビークルRVを操縦しているオペレータOPに刺激を付与する。
電気的に作り出した映像に関連する刺激は、現実のビークルRVを操縦しているオペレータOPが認識できるものであれば、特に限定されない。映像が提示されるタイミングと刺激が提示されるタイミングは、同じであってもよいし、ずれていてもよい。電気的に作り出した映像に関連する刺激は、現実のビークルRVを操縦しているオペレータに対して複数回に亘って付与されてもよい。複数回に亘って付与される刺激は、互いに異なるものであってもよい。
電気的に作り出した映像に関連する刺激は、現実のビークルRVを操縦しているオペレータOPの五感である視覚、聴覚、触覚、臭覚及び味覚の何れかを刺激するものであれば、特に限定されない。電気的に作り出した映像に関連する刺激は、現実のビークルRVを操縦しているオペレータOPの五感である視覚、聴覚、触覚、臭覚及び味覚のうちの複数を刺激するものであってもよい。電気的に作り出した映像に関連する刺激は、現実のビークルRVを操縦しているオペレータOPの触覚を刺激するものであってもよい。電気的に作り出した映像に関連する刺激は、現実のビークルRVを操縦しているオペレータOPが現実のビークルRVを操縦しているときに受ける刺激よりも小さくてもよい。
電気的に作り出した映像に関連する刺激は、例えば、相対位置関係刺激である。相対位置関係刺激は、仮想物体VOと現実のビークルRVとの相対的な位置関係に基づく刺激であって、現実のビークルRVを操縦しているオペレータOPに付与するための刺激である。なお、相対位置関係刺激の詳細については、後述する。
刺激提示部24は、現実のビークルRVを操縦しているオペレータOPに付与する刺激の種類に応じた構造を有していればよい。刺激提示部24によって付与される刺激がオペレータOPの触覚を刺激するものである場合、刺激提示部24は、例えば、現実のビークルRVを操縦しているオペレータOPに接触した状態で使用されるものであればよい。このような刺激提示部24は、例えば、オペレータOPが操縦している現実のビークルの一部を用いて実現することができる。
映像刺激提示装置20は、刺激提示部24として機能する装置を含む。刺激提示部24によって付与される刺激がオペレータOPの触覚を刺激するものである場合、刺激提示部24として機能する装置は、例えば、現実のビークルRVを操縦しているオペレータOPに接触した状態で使用されるものであればよい。刺激提示部24によって付与される刺激がオペレータOPの視覚を刺激するものである場合、刺激提示部24として機能する装置は、例えば、映像提示部22として機能する装置を用いて実現してもよい。つまり、刺激提示部24として機能する装置は、映像提示部22として機能する装置と同じ装置であってもよいし、映像提示部22として機能する装置と異なる装置であってもよい。
本実施の形態では、刺激提示部24として機能する装置として、現実のビークルRVと、光透過型ヘッドマウントディスプレイHMDとが採用されている。現実のビークルRVは、現実のビークルRVを操縦しているオペレータOPの触覚を刺激するために用いられる。そのため、現実のビークルRVを介して、現実のビークルRVを操縦しているオペレータOPに刺激が付与される。光透過型ヘッドマウントディスプレイHMDは、現実のビークルRVを操縦しているオペレータOPの視覚を刺激するために用いられる。なお、光透過型ヘッドマウントディスプレイHMDがスピーカを備える場合、光透過型ヘッドマウントディスプレイHMDは、現実のビークルRVを操縦しているオペレータOPの聴覚を刺激するために用いてもよい。
続いて、このような映像刺激提示装置20に用いられる映像刺激提示制御装置10について説明する。
映像刺激提示制御装置10は、映像刺激提示装置20が提示する映像と刺激とを制御する。映像刺激提示制御装置10は、例えば、IC(Integrated Circuit)、電子部品、回路基板等の組み合わせによって実現される。映像刺激提示制御装置10は、例えば、映像刺激提示装置20に設けられていてもよいし、映像刺激提示装置20に設けられていなくてもよい。
映像刺激提示制御装置10は、現実ビークルデータ取得部11と、仮想物体データ取得部12と、仮想物体映像データ取得部13と、仮想物体映像データ出力部14と、仮想物体現実ビークル刺激データ取得部15と、仮想物体現実ビークル刺激データ出力部16とを含む。現実ビークルデータ取得部11、仮想物体データ取得部12、仮想物体映像データ取得部13、仮想物体映像データ出力部14、仮想物体現実ビークル刺激データ取得部15、及び、仮想物体現実ビークル刺激データ出力部16の各々は、例えば、CPU(Central Processing Unit)が不揮発性のメモリに記憶されたプログラムを読み出し、当該プログラムに従って所定の処理を実行すること等によって実現される。
現実ビークルデータ取得部11は、現実ビークルデータを取得する。現実ビークルデータは、現実のビークルRVと仮想物体OPとの相対的な位置関係に関するデータを含む。
現実ビークルデータ取得部11が現実のビークルRVと仮想物体OPとの相対的な位置関係に関するデータを取得する態様は、特に限定されない。本実施の形態では、現実ビークルデータ取得部11は、現実のビークルRVを操縦しているオペレータOPに装着された光透過型ヘッドマウントディスプレイHMDが備えるカメラCAMによって撮影された仮想物体VOの出現位置を含む画像に基づいて、現実のビークルRVと仮想物体VOとの相対的な位置関係を取得する。カメラCAMによって撮影された画像内での仮想物体VOの出現位置や当該画像の画素数等を利用すれば、現実のビークルRVの現在位置から仮想物体VOの出現位置までの距離と、現実のビークルRVの現在位置から見た仮想物体VOの出現位置の方向が判るので、現実のビークルRVと仮想物体VOとの相対的な位置関係を取得することができる。
仮想物体VOの出現位置には、例えば、マーカーが配置されている。当該マーカーを光透過型ヘッドマウントディスプレイHMDに設けられたカメラCAMで撮影することにより、光透過型ヘッドマウントディスプレイHMDの表示画面に仮想物体VOの映像が表示される。
仮想物体データ取得部12は、仮想物体データを取得する。仮想物体データは、例えば、仮想物体VOの形状に関するデータと、仮想物体VOの出現位置に関するデータとを含む。仮想物体VOは、現実のビークルRVを操縦しているオペレータOPが見ている現実の光景の中に存在しない物体である。
仮想物体データ取得部12が仮想物体データを取得する態様は、特に限定されない。仮想物体データ取得部12は、例えば、図示しないメモリに格納された仮想物体データを読み出すことにより、仮想物体データを取得する。仮想物体データが格納されたメモリは、映像刺激提示制御装置10が備えているものであってもよいし、映像刺激提示制御装置10が備えていないものであってもよい。本実施の形態では、映像刺激提示制御装置10が備える事前登録データ格納部121に格納された仮想物体データを仮想物体データ取得部12が読み出すことにより、仮想物体データ取得部12が仮想物体データを取得する。
仮想物体VOは、現実のビークルRVを操縦しているオペレータOPが見ている現実の光景の中に存在しない物体であれば、特に限定されない。現実の光景は、例えば、現実のビークルRVを操縦しているオペレータOPの周囲の光景である。仮想物体VOは、例えば、固体であってもよいし、液体であってもよいし、気体であってもよいし、固体と液体と気体のうちの少なくとも2つを組み合わせたものであってもよい。仮想物体VOは、例えば、仮想物体VOと現実のビークルRVとの相対的な位置関係に基づいて現実のビークルRVを操縦しているオペレータOPに付与される刺激についての情報を提示する機能を有していてもよい。
仮想物体VOの形状に関するデータは、例えば、仮想物体VOの平面形状に関するものであってもよいし、仮想物体VOの立体形状に関するものであってもよい。仮想物体VOの平面形状は、例えば、仮想物体VOを上から見た形状に関するものであってもよいし、仮想物体VOを前後左右の何れかから見た形状に関するものであってもよい。
仮想物体映像データ取得部13は、現実ビークルデータ取得部11によって取得された現実ビークルデータおよび仮想物体データ取得部12によって取得された仮想物体データに基づいて、仮想物体映像データを取得する。仮想物体映像データは、現実のビークルRVとの相対的な位置が考慮された仮想物体VOの映像に関するデータである。
仮想物体映像データ取得部13は、例えば、現実ビークルデータ取得部11が取得した現実ビークルデータと仮想物体データ取得部12が取得した仮想物体データから仮想物体映像データを生成して取得する。
仮想物体映像データは、現実のビークルRVとの相対的な位置が考慮された仮想物体VOの映像に関するデータであれば、特に限定されない。現実のビークルRVとの相対的な位置が考慮された仮想物体VOの映像は、例えば、現実のビークルRVとの相対的な位置関係に応じた見え方をするように提示される仮想物体VOの映像である。つまり、仮想物体VOの映像は、現実のビークルRVとの相対的な位置関係に応じて変化する。
仮想物体映像データ取得部13が仮想物体映像データを取得する方法としては、例えば、以下のようなものが採用される。なお、以下に説明する方法は、あくまでも一例であって、仮想物体映像データ取得部13が仮想物体映像データを取得する方法は、以下に説明する方法に限定されない。
仮想物体映像データ取得部13は、先ず、現実ビークルデータ取得部11が取得した現実ビークルデータに含まれる現実のビークルRVと仮想物体VOとの相対的な位置関係に基づいて、仮想物体VOの見え方を決定する。次に、仮想物体映像データ取得部13は、決定した見え方に対応する仮想物体VOの映像に関するデータ、つまり、現実のビークルRVとの相対的な位置が考慮された仮想物体VOの映像に関するデータである仮想物体映像データを生成する。このようにして、仮想物体映像データ取得部13は、仮想物体映像データを取得する。
例えば、現実のビークルRVと仮想物体VOとの相対的な位置関係が「現実のビークルRVの左斜め前に仮想物体VOが位置する」ことである場合、現実のビークルRVとの相対的な位置が考慮された仮想物体VOの映像は、「右斜め後から見た仮想物体VOの映像」になる。
仮想物体映像データ出力部14は、現実のビークルRVを操縦しているオペレータOPが見ている現実の光景に仮想物体VOの映像が重ねて提示されるように、仮想物体映像データを映像刺激提示装置20に出力する。具体的には、仮想物体映像データ出力部14は、現実のビークルRVを操縦しているオペレータOPが見ている現実の光景に仮想物体VOの映像が重ねて提示されるように、仮想物体映像データを映像提示部22に出力する。これにより、映像刺激提示装置20(映像提示部22)は、現実のビークルRVを操縦しているオペレータOPが見ている現実の光景に仮想物体VOの映像を重ねて提示する。現実のビークルRVを操縦しているオペレータOPが見ている現実の光景に仮想物体VOの映像が重ねて提示されることにより、現実のビークルRVを操縦しているオペレータOPが現実の光景と仮想物体VOの映像を同時に見ることができる。
仮想物体現実ビークル刺激データ取得部15は、現実ビークルデータ取得部11によって取得された現実ビークルデータおよび仮想物体データ取得部12によって取得された仮想物体データに基づいて、仮想物体現実ビークル刺激データを取得する。仮想物体現実ビークル刺激データは、相対位置関係刺激に関するデータを含む。相対位置関係刺激は、仮想物体VOと現実のビークルRVとの相対的な位置関係に基づく刺激であって、現実のビークルRVを操縦しているオペレータOPに付与するための刺激である。
仮想物体現実ビークル刺激データ取得部15は、例えば、参照テーブルを用いることにより、現実ビークルデータ取得部11が取得した現実ビークルデータと仮想物体データ取得部12が取得した仮想物体データに対応する仮想物体現実ビークル刺激データを取得する。
仮想物体現実ビークル刺激データは、相対位置関係刺激に関するデータを含むものであれば、特に限定されない。相対位置関係刺激は、仮想物体VOと現実のビークルRVとの相対的な位置関係に基づく刺激であって、現実のビークルRVを操縦しているオペレータOPに付与するための刺激であれば、特に限定されない。
仮想物体VOと現実のビークルRVとの相対的な位置関係に基づく刺激は、例えば、仮想物体VOと現実のビークルRVとの相対的な位置関係を示す刺激であってもよいし、仮想物体VOと現実のビークルRVとの相対的な位置関係に起因して付与される刺激であってもよい。仮想物体VOと現実のビークルRVとの相対的な位置関係に起因して付与される刺激は、仮想物体VOと現実のビークルRVとの相対的な位置関係に起因して行われる現実のビークルRVへの制御により、現実のビークルRVのオペレータOPに付与されるものを含む。仮想物体VOと現実のビークルRVとの相対的な位置関係に起因して行われる現実のビークルRVへの制御により、現実のビークルRVのオペレータOPに付与される刺激は、例えば、現実のビークルRVの加速又は減速に起因して現実のビークルRVのオペレータOPが現実のビークルRVの前又は後方向の加速度を感じることを含む。現実のビークルRVの前又は後方向に加速度を感じる場合、現実のビークルRVのオペレータOPは、例えば、現実のビークルRVに設けられたシートへの着座状態の変化を触覚にて感じることができる。
仮想物体現実ビークル刺激データ取得部15が仮想物体現実ビークル刺激データを取得する方法としては、例えば、以下のようなものが採用される。なお、以下に説明する方法は、あくまでも一例であって、仮想物体現実ビークル刺激データ取得部15が仮想物体現実ビークル刺激データを取得する方法は、以下に説明する方法に限定されない。
仮想物体現実ビークル刺激データ取得部15は、現実ビークルデータ取得部11が取得した現実ビークルデータに含まれる現実のビークルRVと仮想物体VOとの相対的な位置関係に対応する刺激が存在するか否かを確認する。当該刺激が存在する場合には、仮想物体現実ビークル刺激データ取得部15は、現実のビークルRVと仮想物体VOとの相対的な位置関係に対応する刺激に関するデータを含む仮想物体現実ビークル刺激データを取得する。このようにして、仮想物体現実ビークル刺激データ取得部15は、仮想物体現実ビークル刺激データを取得する。
例えば、現実のビークルRVと仮想物体VOの相対的な位置関係が「現実のビークルRVが仮想物体VOに接触した」ことを示す場合、仮想物体現実ビークル刺激データ取得部15は、現実のビークルRVが仮想物体VOに接触した場合について設定された刺激に関するデータを含む仮想物体現実ビークル刺激データを、例えば、参照テーブルを用いて取得する。
相対位置関係刺激は、例えば、現実のビークルRVを操縦しているオペレータOPの五感である視覚、聴覚、触覚、臭覚及び味覚のうちの複数の感覚を刺激するものであってもよい。相対位置関係刺激は、例えば、現実のビークルRVを操縦しているオペレータOPの触覚を刺激するものを含むものであってもよい。相対位置関係刺激は、例えば、オペレータOPが現実のビークルRVを操縦しているときに受ける刺激よりも小さくてもよい。
相対位置関係刺激がオペレータOPの視覚を刺激するものである場合、当該刺激がオペレータOPに付与される態様には、例えば、現実のビークルRVと仮想物体VOとの相対的な位置関係に応じた映像を表示する態様や、現実のビークルと仮想物体との相対的な位置関係に応じて仮想物体VOの映像を変化させる態様等が含まれる。
相対位置関係刺激がオペレータOPの聴覚を刺激するものである場合、当該刺激がオペレータOPに付与される態様には、例えば、現実のビークルRVと仮想物体VOとの相対的な位置関係に応じた音声を出力する態様や、現実のビークルRVを仮想物体VOとの相対的な位置関係に応じて出力される音声を変化させる態様等が含まれる。
相対位置関係刺激がオペレータOPの触覚を刺激するものである場合、当該刺激がオペレータOPに付与される態様には、例えば、現実のビークルRVと仮想物体VOとの相対的な位置関係に応じてオペレータOPの身体に及ぼされる力の大きさや力が及ぼされる方向を変化させる態様等が含まれる。オペレータOPの身体に及ぼされる力の大きさを変化させる態様には、例えば、オペレータOPの身体に力が及ぼされていない状態からオペレータOPの身体に力を及ぼす態様が含まれる。
相対位置関係刺激がオペレータOPの嗅覚を刺激するものである場合、当該刺激がオペレータOPに付与される態様には、例えば、現実のビークルRVと仮想物体VOとの相対的な位置関係に応じて匂いを変化させる態様等が含まれる。匂いを変化させる態様には、例えば、オペレータOPが刺激として付与される匂いを嗅いでいない状態から当該匂いを嗅いでいる状態に変化させる態様が含まれる。
相対位置関係刺激がオペレータOPの味覚を刺激するものである場合、当該刺激がオペレータOPに付与される態様には、例えば、現実のビークルRVと仮想物体VOとの相対的な位置関係に応じて、味を変化させる態様等が含まれる。味を変化させる態様には、例えば、オペレータOPが刺激として付与される味を感じていない状態から当該味を感じている状態に変化させる態様が含まれる。
仮想物体現実ビークル刺激データ出力部16は、現実のビークルRVを操縦しているオペレータOPに対して付与されるように、仮想物体現実ビークル刺激データを映像刺激提示装置20に出力する。具体的には、仮想物体現実ビークル刺激データ出力部16は、相対位置関係刺激が現実のビークルRVを操縦しているオペレータOPに対して付与されるように、仮想物体現実ビークル刺激データを刺激提示部24に出力する。これにより、映像刺激提示装置20(刺激提示部24)は、現実のビークルRVを操縦しているオペレータOPに相対位置関係刺激を付与する。その結果、現実のビークルRVを操縦しているオペレータOPに対して相対位置関係刺激が付与されることにより、現実のビークルRVを操縦しているオペレータOPは、現実のビークルRVを操縦することで受ける刺激に加えて、仮想物体VOと現実のビークルRVとの相対的な位置関係に基づく刺激である相対位置関係刺激を受けることができる。
本実施の形態では、刺激提示部24としての機能を有する装置として、現実のビークルRVが採用されている。そのため、仮想物体現実ビークル刺激データ出力部16は、現実のビークルRVを操縦しているオペレータOPに対して、現実のビークルRVを介して相対位置関係刺激が付与されるように、仮想物体現実ビークル刺激データを映像刺激提示装置20に出力する。
続いて、図2を参照しながら、映像刺激提示制御装置10が実行する仮想物体映像データ取得処理について説明する。図2は、映像刺激提示制御装置10が実行する仮想物体映像データ取得処理を示すフローチャートである。
先ず、映像刺激提示制御装置10は、ステップS11において、現実ビークルデータ取得部11が取得した現実ビークルデータに含まれる現実のビークルRVと仮想物体VOとの相対的な位置関係に基づいて、仮想物体VOの見え方を決定する。
続いて、映像刺激提示制御装置10は、ステップS12において、現実のビークルRVと仮想物体VOとの相対的な位置関係に応じた見え方をするように提示される仮想物体VOの映像に関するデータ、つまり、現実のビークルRVとの相対的な位置が考慮された仮想物体VOの映像に関するデータである仮想物体映像データを生成して取得する。
続いて、映像刺激提示制御装置10は、ステップS13において、ステップS12にて取得した仮想物体映像データを映像刺激提示装置20に出力する。その後、映像刺激提示制御装置10は、仮想物体映像データ取得処理を終了する。
続いて、図3を参照しながら、映像刺激提示制御装置10が実行する仮想物体現実ビークル刺激データ取得処理について説明する。図3は、映像刺激提示制御装置10が実行する仮想物体現実ビークル刺激データ取得処理を示すフローチャートである。
先ず、映像刺激提示制御装置10は、ステップS21において、現実ビークルデータ取得部11が取得した現実ビークルデータに含まれる現実のビークルRVと仮想物体VOとの相対的な位置関係に対応する刺激であって、仮想物体データ取得部12が取得した仮想物体データに含まれる仮想物体の種類に対応する刺激が存在するか否かを確認する。
現実ビークルデータ取得部11が取得した現実ビークルデータに含まれる現実のビークルRVと仮想物体VOとの相対的な位置関係に対応する刺激であって、仮想物体データ取得部12が取得した仮想物体データに含まれる仮想物体の種類に対応する刺激が存在しない場合(ステップS21:NO)、映像刺激提示制御装置10は、仮想物体現実ビークル刺激データ取得処理を終了する。
現実ビークルデータ取得部11が取得した現実ビークルデータに含まれる現実のビークルRVと仮想物体VOとの相対的な位置関係に対応する刺激であって、仮想物体データ取得部12が取得した仮想物体データに含まれる仮想物体の種類に対応する刺激が存在する場合(ステップS21:YES)、映像刺激提示制御装置10は、ステップS22において、現実ビークルデータ取得部11が取得した現実ビークルデータに含まれる現実のビークルRVと仮想物体VOとの相対的な位置関係に対応する刺激であって、仮想物体データ取得部12が取得した仮想物体データに含まれる仮想物体の種類に対応する刺激に関するデータを含む仮想物体現実ビークル刺激データを取得する。
続いて、映像刺激提示制御装置10は、ステップS23において、ステップS22にて取得した仮想物体現実ビークル刺激データを映像刺激提示装置20に出力する。その後、映像刺激提示制御装置10は、仮想物体現実ビークル刺激データ取得処理を終了する。
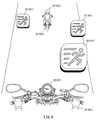
続いて、図4~図10を参照しながら、現実のビークルRVを操縦しているオペレータOPが見る光景と、現実のビークルRVを操縦しているオペレータOPに付与される刺激とについて説明する。図4~図10は、それぞれ、現実のビークルRVを操縦しているオペレータOPが見る光景の一例を説明するための説明図である。
なお、以下では、サーキットのコースを2台の現実のビークルRVが走行する場合について説明する。2台の現実のビークルRVの各々は、鞍乗型電動車両である。2台の現実のビークルRVが走行するサーキットのコースは、例えば、私有地内に設けられている。2台の現実のビークルRVが走行するサーキットのコースは、例えば、2台の現実のビークルRVだけが走行できる状態で使用される。2台の現実のビークルRVが走行するサーキットのコースは、例えば、アスファルトで形成されていてもよいし、衝撃を和らげることが可能な材料で形成されていてもよい。
図4~図10は、それぞれ、2台の現実のビークルRVのうち後に位置する現実のビークルRV(以下、このような現実のビークルRVを「現実のビークルRV1」とする)を操縦しているオペレータOP(以下、このようなオペレータOPを「オペレータOP1」とする)が見る光景の一例を示している。現実のビークルRV1を操縦しているオペレータOP1は、現実のビークルRV1よりも前に位置する現実のビークルRV(以下、このような現実のビークルRVを「現実のビークルRV2」とする)と、当該現実のビークルRV2を操縦しているオペレータOP(以下、このようなオペレータOPを「オペレータOP2」とする)とを見ることができる。
サーキットのコース上には、少なくとも1つの仮想物体出現位置が設定されている。現実のビークルRVがサーキットのコースを走行しているとき、サーキットのコース上に設定された仮想物体出現位置において仮想物体VOが出現するように、仮想物体VOが現実の光景に重ねて提示される。例えば、仮想物体出現位置に設けられたマーカーをカメラCAMで撮影すると、光透過型ヘッドマウントディスプレイHMDの表示画面に仮想物体VOが表示される。
仮想物体VOは、サーキットのコースにて行われるレースを有利に(又は不利に)するためのアイテムである。サーキットのコースにて行われるレース中において、現実のビークルRVが仮想物体VOに接触することにより、当該接触した仮想物体VOに設定されている効果が現実のビークルRVに付与される。
なお、以下の説明では、便宜上、「仮想物体VOと現実のビークルRVとが接触する」との表現を用いるが、仮想物体VOが現実の光景の中に存在しないものであるため、仮想物体VOと現実のビークルRVとが現実の世界で物理的に接触することはない。「仮想物体VOと現実のビークルRVとが接触する」というのは、仮想物体VOと現実のビークルRVとの相対的な位置関係に基づいて仮想物体VOと現実のビークルRVとが接触していると映像刺激提示制御装置10によって判定される場合のことである。
図4を参照しながら、説明する。図4は、現実のビークルRV1を操縦しているオペレータOP1が見る光景の一例を説明するための説明図であって、複数の仮想物体VO1が現実の光景に重ねて提示されている情況を示す説明図である。
現実のビークルRVを操縦しているオペレータOPは、複数の仮想物体VO1の映像を現実の光景の中に見ることができる。複数の仮想物体VO1は、それぞれ、現実のビークルRVとの相対的な位置が考慮された状態で、現実の光景に重ねて提示されている。したがって、複数の仮想物体VO1は、それぞれ、見え方が異なっている。
複数の仮想物体VO1は、それぞれ、サーキットのコース上に設定された仮想物体出現位置に出現するように、現実の光景に重ねて提示されている。複数の仮想物体VO1は、それぞれ、サーキットのコース上に設定された仮想物体出現位置から移動しないようにして、現実の光景に重ねて提示されていてもよい。或いは、複数の仮想物体VO1は、それぞれ、サーキットのコース上に設定された仮想物体出現位置を中心とする所定の範囲内を移動するようにして、現実の光景に重ねて提示されていてもよい。
複数の仮想物体VO1は、それぞれ、サーキットのコース上にて行われるレースを有利にするためのアイテムである。複数の仮想物体VO1は、それぞれ、現実のビークルRVの車速を上昇させるためのアイテムである。
複数の仮想物体VO1は、それぞれ、矩形の板形状を有している。複数の仮想物体VO1の各々が有する特定の面(以下、このような面を「表面」と称する)には、絵柄が記載されている。当該絵柄は、仮想物体VO1に接触することで現実のビークルRVが得られる効果を示している。本実施の形態では、仮想物体VO1の表面に記載された絵柄は、現実のビークルRVの車速が上昇することを示している。つまり、仮想物体VO1には、情報伝達機能が付与されている。
このような複数の仮想物体VO1の何れかと現実のビークルRV1が接触する場合について、図5を参照しながら、説明する。図5は、現実のビークルRV1を操縦しているオペレータOP1が見る光景の一例を説明するための説明図であって、複数の仮想物体VO1の何れかと現実のビークルRV1とが接触したときの情況を示す説明図である。
現実のビークルRVが仮想物体VO1に接触すると、仮想物体VO1の映像が変化する。つまり、仮想物体VO1の映像が変化することにより、現実のビークルRVを操縦しているオペレータOPは、現実のビークルRVが仮想物体VO1に接触したことを認識することができる。このように、現実のビークルRVが仮想物体VO1に接触することに起因して仮想物体VO1の映像が変化することにより、現実のビークルRVを操縦しているオペレータの視覚が刺激される。
続いて、仮想物体VO1に接触したことで現実のビークルRVが得る効果について、図6を参照しながら、説明する。図6は、現実のビークルRV1を操縦しているオペレータOP1が見る光景の一例を説明するための説明図であって、現実のビークルRV1が仮想物体VO1に接触することで得られる効果を説明するための説明図である。
仮想物体VO1に接触することで、現実のビークルRVの車速が上昇している。そのため、図6では、2番手で走行している現実のビークルRV1と先頭を走る現実のビークルRV2との距離が縮まっている。
なお、本実施の形態では、現実のビークルRVが仮想物体VO1に接触すると、現実のビークルRVを操縦しているオペレータOPの視界のうち左上の領域に、現実のビークルRVが接触した仮想物体VO1を示すアイコンが表示される。これにより、現実のビークルRVを操縦しているオペレータOPは、現実のビークルRVが接触した仮想物体VOの種類を認識することができる。
また、本実施の形態では、現実のビークルRVが仮想物体VO1に接触することで得られる効果を示す文字情報(図中の「SPEED UP」)が提示される。これにより、現実のビークルRVを操縦しているオペレータOPは、現実のビークルRVが接触した仮想物体VOによって得られる効果を認識することができる。
ここで、現実のビークルRVの車速が上昇するとき、現実のビークルRVは加速する。現実のビークルRVが加速すると、現実のビークルRVを操縦しているオペレータOPが見る現実の光景は、現実のビークルRVが加速する前よりも速く変化する。例えば、現実のビークルRVを操縦しているオペレータOPが現実のビークルRVの前方を見ているときに現実のビークルRVが加速すると、現実のビークルRVを操縦しているオペレータOPの後方に向かって現実の光景が流れる速度が大きくなる。また、2番手で走行している現実のビークルRV1のオペレータOP1は、現実のビークルRV1の車速が上昇して、先行する現実のビークルRV2との距離が短くなることにより、現実のビークルRV1の車速が上昇する前と比べて、先行する現実のビークルRV2が大きく見える。つまり、現実のビークルRVを操縦しているオペレータOPは、現実のビークルRVが加速することにより、視覚が刺激される。したがって、現実のビークルRVの車速を上昇させることは、現実のビークルRVを操縦しているオペレータOPに刺激を付与することになる。
なお、現実のビークルRVの車速を上昇させる際に現実のビークルRVを操縦しているオペレータOPに付与する刺激は、上記のようなオペレータOPの視覚を刺激するものに限定されない。例えば、現実のビークルRVが加速するときに、現実のビークルRVを操縦しているオペレータOPが現実のビークルRVの後方向に加速度を感じることがある。これは、現実のビークルRVを操縦しているオペレータOPが、例えば、現実のビークルRVに設けられたシートに対する着座状態の変化(例えば、現実のビークルRVの後方向に体が移動しようとすることに起因する着座位置の変化)を触覚にて感じるためである。つまり、現実のビークルRVの加速に伴って現実のビークルRVを操縦しているオペレータOPに付与される刺激には、触覚を刺激するものが含まれる場合がある。
続いて、図7を参照しながら、サーキットのコース上に出現する仮想物体VOについて説明する。図7は、現実のビークルRV1を操縦しているオペレータOP1が見る光景の一例を説明するための説明図であって、図4及び図5に示す仮想物体VOとは異なる仮想物体VOがサーキットのコース上に出現している情況を示す説明図である。
図7では、複数の仮想物体VO2、VO3、VO4がサーキットのコース上に出現している。複数の仮想物体VO2、VO3、VO4は、それぞれ、図4及び図5に示す仮想物体VO1とは異なる。複数の仮想物体VO2、VO3、VO4の各々に設定されている効果は、図4及び図5に示す仮想物体VO1に設定されている効果とは異なる。
なお、本実施の形態では、現実のビークルRVが複数の仮想物体VO2、VO3、VO4の何れかに接触するのを促す映像(図中の複数の矢印)が表示されている。これにより、現実のビークルRVを操縦しているオペレータOPに対して、操縦している現実のビークルRVを複数の仮想物体VO2、VO3、VO4の何れかに接触させる動機が付与される。
続いて、図8~図10を参照しながら、図7に示す仮想物体VO3に対して現実のビークルRVが接触した場合の効果について説明する。図8~図10は、それぞれ、現実のビークルRV1を操縦しているオペレータOP1が見る光景の一例を説明するための説明図であって、図7に示す仮想物体VO3に対して現実のビークルRVが接触した場合の効果を説明するための説明図である。
図7に示す仮想物体VO3に現実のビークルRVが接触したときの効果は、現実のビークルRV1から先行する現実のビークルRV2に向かってレーザービームが照射され、当該レーザービームが先行する現実のビークルRV2に命中すると、先行する現実のビークルRV2の車速が低下するというものである。
具体的には、図7に示す仮想物体VO3に現実のビークルRVが接触すると、図8に示すように、先行する現実のビークルRV2がレーザービームの照射対象であることを示す映像(図中の「TARGET」との文字)が提示される。これにより、図7に示す仮想物体VO3に接触した現実のビークルRV1を操縦しているオペレータOP1の視覚が刺激される。
続いて、図9に示すように、現実のビークルRV1から先行する現実のビークルRV2に向かってレーザービームが照射され、当該レーザービームが先行する現実のビークルRV2に命中する。このような映像が提示されることにより、図7に示す仮想物体VO3に接触した現実のビークルRV1を操縦しているオペレータOP1の視覚が刺激される。
その後、図10に示すように、先行する現実のビークルRV2は、現実のビークルRV1から照射されたレーザービームが命中したことによるダメージを受けて、車速が低下する。図10では、先行する現実のビークルRV2が現実のビークルRV1から照射されたレーザービームによってダメージを受けていることを示す映像(図中の炎と、文字情報である「DAMAGE」)が提示される。また、図10では、先行する現実のビークルRV2にレーザービームが命中したことを賞賛する映像(図中の文字情報である「GREAT」)が提示される。また、先行する現実のビークルRV2の車速が低下することに伴って、先行する現実のビークルRV2と2番手で走行する現実のビークルRV1との距離が短くなり、先行する現実のビークルRV2の車速が低下する前と比べて、先行する現実のビークルRV2が大きく見えるようになる。これにより、図7に示す仮想物体VO3に接触した現実のビークルRV1を操縦しているオペレータOP1の視覚が刺激される。
このような映像刺激提示制御装置10が用いられる映像刺激提示装置20によれば、現実のビークルRVを操縦しているオペレータOPに対して、高い現実感覚を有する新たな仮想的体験を提供することができる。具体的には、以下のとおりである。
現実のビークルRVを操縦しているオペレータOPは、現実のビークルRVとの相対的な位置が考慮された仮想物体VOの映像を現実の光景の中に見ることができる。つまり、現実のビークルRVを操縦しているオペレータOPは、制御された仮想物体VOの映像と現実の光景を見ることができる。
現実のビークルRVを操縦しているオペレータOPは、現実の光景の中に仮想物体VOの映像を見ながら現実のビークルRVを操縦しているときに、現実のビークルRVを操縦していることによって刺激を受けている。また、現実のビークルRVを操縦しているオペレータOPは、現実のビークルRVを操縦しているときに、現実のビークルRVを操縦していることによって受けている刺激に加えて、仮想物体VOと現実のビークルRVとの相対的な位置関係に基づく刺激である相対位置関係刺激を受けることができる。
したがって、映像刺激提示制御装置10が用いられる映像刺激提示装置20によれば、現実のビークルRVを操縦しているオペレータOPに対して、高い現実感覚を有する新たな仮想的体験を提供することができる。
また、映像刺激提示制御装置10によれば、シンプルな制御によって高い現実感覚を有する新たな仮想的体験を提供することができる。具体的には、以下のとおりである。
仮想的な体験を提供するために現実のビークルRVを操縦しているオペレータOPに対して提示される映像とその映像に関連する刺激は、仮想物体VOの映像と、その仮想物体VOと現実のビークルRVとの相対的な位置関係を示す相対位置関係刺激である。また、映像刺激提示制御装置10が関連付ける映像と刺激は、仮想物体VOの映像と、その仮想物体VOと現実のビークルRVとの相対的な位置関係を示す相対位置関係刺激である。
このように、映像刺激提示制御装置10が関連させる映像と刺激は、オペレータOPが見ている光景を全て映像とし、その映像とオペレータが受ける全ての刺激とを関連付ける従来の映像刺激提示制御装置が制御するものより少なくて済む。つまり、仮想物体VOの映像は、オペレータOPが見ている光景を全て仮想空間の映像とした場合に比べて、少ない処理負担で提供することができる。また、オペレータOPは現実のビークルRVを操縦することで刺激に対して敏感になっており、現実のビークルRVを操縦しているオペレータOPに付与する刺激は少なくてもよいので、刺激の付与に伴う処理負担を軽減することができる。そのため、映像刺激提示制御装置10が行う制御をシンプルな制御にすることができる。
また、映像刺激提示制御装置10が用いられる映像刺激提示装置20においては、オペレータOPが操縦している現実のビークルRVを介して、相対位置関係刺激がオペレータOPに付与される。そのため、相対位置関係刺激をオペレータOPに感じさせやすくなる。その理由は、以下のとおりである。
現実のビークルRVを操縦しているオペレータOPは、現実のビークルRVを操縦しているときに、現実のビークルRVを操縦していることによる刺激を感じ取っている。そのため、現実のビークルRVを操縦しているオペレータOPは、現実のビークルRVを操縦しているときには、刺激に対して敏感になっている。このように刺激に対して敏感になっているオペレータOPに相対位置関係刺激を付与すれば、オペレータOPは現実のビークルRVを操縦していることによる刺激に加えて付与される相対位置関係刺激についても感じ取りやすくなる。したがって、オペレータOPが操縦している現実のビークルRVを介して相対位置関係刺激がオペレータOPに付与されるようにすれば、相対位置関係刺激をオペレータOPに感じさせやすくなる。
(実施の形態の変形例)
図11及び図12を参照しながら、現実のビークルRVを操縦しているオペレータOPが見る仮想物体VOについて説明する。図11及び図12は、それぞれ、現実のビークルRVを操縦しているオペレータOPが見る光景の一例を説明するための説明図であって、仮想物体VOが現実のビークルRVの教習の課題に用いられるものであることを示す説明図である。
図11及び図12を参照しながら、現実のビークルRVを操縦しているオペレータOPが見る仮想物体VOについて説明する。図11及び図12は、それぞれ、現実のビークルRVを操縦しているオペレータOPが見る光景の一例を説明するための説明図であって、仮想物体VOが現実のビークルRVの教習の課題に用いられるものであることを示す説明図である。
図11を参照して、仮想物体VO5は、現実のビークルRVの教習の課題であるスラローム走行に用いられるパイロンである。仮想物体VO5を用いることにより、例えば、現実のビークルRVの教習において、現実のビークルRVがパイロン(仮想物体VO5)を倒すことがあっても、倒したパイロン(仮想物体VO5)を現実のビークルRVのオペレータOPが元の位置に戻す必要がなくなる。
現実のビークルRVが仮想物体VO5としてのパイロンに接触すると、現実のビークルRVを操縦しているオペレータOPに刺激が付与される。当該刺激は、例えば、現実のビークルRVを操縦しているオペレータOPの聴覚が刺激される音声であってもよいし、現実のビークルRVを操縦しているオペレータOPの視覚が刺激される映像であってもよい。
なお、現実のビークルの形状と仮想物体の形状とを用いて、現実のビークルと仮想物体の相対的な位置関係を判定すれば、現実のビークルと仮想物体の相対的な位置関係をより高精度に判定することができる。
図12を参照して、仮想物体VO6は、現実のビークルRVの教習の課題に用いられる一本橋である。現実のビークルRVが仮想物体VO6としての一本橋から落下すると、現実のビークルRVを操縦しているオペレータOPに刺激が付与される。当該刺激は、例えば、現実のビークルRVを操縦しているオペレータOPの聴覚が刺激される音声であってもよいし、現実のビークルRVを操縦しているオペレータOPの視覚が刺激される映像であってもよい。或いは、現実のビークルRVを操縦しているオペレータOPの触覚が刺激されるように、現実のビークルRVの駆動力を変化させるものであってもよい。
(その他の実施形態)
本明細書において記載と図示の少なくとも一方がなされた実施形態及び変形例は、本開示の理解を容易にするためのものであって、本開示の思想を限定するものではない。上記の実施形態及び変形例は、その趣旨を逸脱することなく変更・改良され得る。
本明細書において記載と図示の少なくとも一方がなされた実施形態及び変形例は、本開示の理解を容易にするためのものであって、本開示の思想を限定するものではない。上記の実施形態及び変形例は、その趣旨を逸脱することなく変更・改良され得る。
当該趣旨は、本明細書に開示された実施形態に基づいて当業者によって認識されうる、均等な要素、修正、削除、組み合わせ(例えば、実施形態及び変形例に跨る特徴の組み合わせ)、改良、変更を包含する。特許請求の範囲における限定事項は当該特許請求の範囲で用いられた用語に基づいて広く解釈されるべきであり、本明細書あるいは本願のプロセキューション中に記載された実施形態及び変形例に限定されるべきではない。そのような実施形態及び変形例は非排他的であると解釈されるべきである。例えば、本明細書において、「好ましくは」、「よい」という用語は非排他的なものであって、「好ましいがこれに限定されるものではない」、「よいがこれに限定されるものではない」ということを意味する。
上記実施の形態では、サーキットのコースを2台の鞍乗型電動車両RV1、RV2が走行する場合について説明したが、例えば、サーキットのコースを3台以上の鞍乗型電動車両が走行する場合や、サーキットのコースを1台の鞍乗型電動車両が走行する場合であっても、本発明は適用可能である。
上記実施の形態では、映像刺激提示装置20の映像提示部22として、光透過型ヘッドマウントディスプレイを採用しているが、映像刺激提示装置20の映像提示部22は、例えば、オペレータOPの網膜に映像を投影するものであってもよい。
上記実施の形態では、矩形の板形状を有する仮想物体VO1の表面に絵柄が記載されており、当該絵柄が見える状態の仮想物体VO1に対して現実のビークルRVが接触することにより、現実のビークルRVの車速が上昇するようになっている。例えば、仮想物体VO1のうち表面の反対側の面(以下、このような面を裏面とする)にも絵柄が記載されており、当該絵柄が見える状態の仮想物体VO1に対して現実のビークルRVが接触することにより、現実のビークルRVの車速が減少するようにしてもよい。このように表面及び裏面のそれぞれに異なる効果を示す絵柄が記載された仮想物体VO1は、例えば、仮想物体VO1が出現する位置において回転するように表示されてもよい。
上記実施の形態では、現実のビークルRVが仮想物体VOに接触する場合にのみ、現実のビークルRVを操縦しているオペレータOPに刺激を付与しているが、例えば、現実のビークルRVが仮想物体VOの直ぐ近くに位置するのであれば、現実のビークルRVを操縦しているオペレータOPに刺激を付与してもよい。この場合の刺激としては、例えば、現実のビークルRVを操縦しているオペレータOPの聴覚を刺激する風切音を出力することが考えられる。
上記実施の形態では、映像提示部が光透過型ヘッドマウントディスプレイによって実現されているが、映像提示部はカメラが撮影したオペレータの周囲の画像を表示するビデオ透過型ヘッドマウントディスプレイであってもよい。
10 映像刺激提示制御装置
11 現実ビークルデータ取得部
12 仮想物体データ取得部
13 仮想物体映像データ取得部
14 仮想物体映像データ出力部
15 仮想物体現実ビークル刺激データ取得部
16 仮想物体現実ビークル刺激データ出力部
20 映像刺激提示装置
22 映像提示部
24 刺激提示部
30 現実ビークル位置情報取得装置
HMD 光透過型ヘッドマウントディスプレイ
RV 現実のビークル
OP オペレータ
VO 仮想物体
11 現実ビークルデータ取得部
12 仮想物体データ取得部
13 仮想物体映像データ取得部
14 仮想物体映像データ出力部
15 仮想物体現実ビークル刺激データ取得部
16 仮想物体現実ビークル刺激データ出力部
20 映像刺激提示装置
22 映像提示部
24 刺激提示部
30 現実ビークル位置情報取得装置
HMD 光透過型ヘッドマウントディスプレイ
RV 現実のビークル
OP オペレータ
VO 仮想物体
Claims (6)
- 現実のビークルを操縦しているオペレータに対して仮想的な体験を提供するために電気的に作り出した映像と前記映像に関連する刺激とを前記オペレータに提示する映像刺激提示装置に用いられ、前記映像刺激提示装置が提示する前記映像と前記刺激を制御する映像刺激提示制御装置であって、
前記現実のビークルを操縦している前記オペレータが見ている現実の光景の中に存在しない物体である仮想物体の種類及び形状に関するデータを含む仮想物体データを取得する仮想物体データ取得部と、
前記現実のビークルと前記仮想物体との相対的な位置関係に関するデータを含む現実ビークルデータを取得する現実ビークルデータ取得部と、
前記現実ビークルデータ取得部によって取得された前記現実ビークルデータおよび前記仮想物体データ取得部によって取得された前記仮想物体データに基づいて、前記現実のビークルとの相対的な位置が考慮された前記仮想物体の映像に関するデータである仮想物体映像データを取得する仮想物体映像データ取得部と、
前記現実のビークルを操縦している前記オペレータが見ている前記現実の光景に前記仮想物体の映像が重ねて提示されるように、前記仮想物体映像データを前記映像刺激提示装置に出力する仮想物体映像データ出力部と、
前記現実ビークルデータ取得部によって取得された前記現実ビークルデータおよび前記仮想物体データ取得部によって取得された前記仮想物体データに基づいて、前記仮想物体と前記現実のビークルとの相対的な位置関係に基づく刺激であって、前記現実のビークルを操縦している前記オペレータに付与するための刺激である相対位置関係刺激に関するデータを含む仮想物体現実ビークル刺激データを取得する仮想物体現実ビークル刺激データ取得部と、
前記相対位置関係刺激が前記現実のビークルを操縦している前記オペレータに対して付与されるように、前記仮想物体現実ビークル刺激データを前記映像刺激提示装置に出力する仮想物体現実ビークル刺激データ出力部と、
を備える、映像刺激提示制御装置。 - 請求項1に記載の映像刺激提示制御装置であって、
前記映像刺激提示装置は、前記オペレータが操縦する前記現実のビークルの少なくとも一部を含み、
前記仮想物体現実ビークル刺激データ出力部は、前記相対位置関係刺激が前記現実のビークルを操縦している前記オペレータに対して前記現実のビークルの少なくとも一部を介して付与されるように、前記仮想物体現実ビークル刺激データを前記映像刺激提示装置に出力する、映像刺激提示制御装置。 - 請求項1又は2に記載の映像刺激提示制御装置であって、
前記相対位置関係刺激は、前記現実のビークルを操縦しているオペレータの五感である視覚、聴覚、触覚、臭覚及び味覚のうちの複数の感覚を刺激するものである、映像刺激提示制御装置。 - 請求項3に記載の映像刺激提示制御装置であって、
前記相対位置関係刺激は、前記現実のビークルを操縦しているオペレータの触覚を刺激するものを含む、映像刺激提示制御装置。 - 請求項1~4の何れか1項に記載の映像刺激提示制御装置であって、
前記相対位置関係刺激は、前記オペレータが前記現実のビークルを操縦しているときに受ける刺激よりも小さい、映像刺激提示制御装置。 - 請求項1~5の何れか1項に記載の映像刺激提示制御装置であって、
前記現実ビークルデータは、前記現実のビークルの形状に関するデータを含む、映像刺激提示制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2019/004398 WO2020161853A1 (ja) | 2019-02-07 | 2019-02-07 | 映像刺激提示制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2019/004398 WO2020161853A1 (ja) | 2019-02-07 | 2019-02-07 | 映像刺激提示制御装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2020161853A1 true WO2020161853A1 (ja) | 2020-08-13 |
Family
ID=71948172
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2019/004398 WO2020161853A1 (ja) | 2019-02-07 | 2019-02-07 | 映像刺激提示制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| WO (1) | WO2020161853A1 (ja) |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07271289A (ja) * | 1994-03-30 | 1995-10-20 | Mazda Motor Corp | シミュレーション装置 |
| JP2010151939A (ja) * | 2008-12-24 | 2010-07-08 | Toyota Central R&D Labs Inc | 運転模擬試験装置、及びプログラム |
| JP2012098609A (ja) * | 2010-11-04 | 2012-05-24 | Ns Solutions Corp | 情報処理装置、自動車、情報処理方法及びプログラム |
| US20180204478A1 (en) * | 2015-04-29 | 2018-07-19 | Ivan Banga | Driver Education System And Method For Training In Simulated Road Emeregencies |
| JP2019008513A (ja) * | 2017-06-23 | 2019-01-17 | 学校法人幾徳学園 | バーチャルリアリティシステムおよびプログラム |
| JP2019016358A (ja) * | 2018-07-06 | 2019-01-31 | 株式会社コロプラ | 情報処理方法、プログラム及びコンピュータ |
-
2019
- 2019-02-07 WO PCT/JP2019/004398 patent/WO2020161853A1/ja active Application Filing
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07271289A (ja) * | 1994-03-30 | 1995-10-20 | Mazda Motor Corp | シミュレーション装置 |
| JP2010151939A (ja) * | 2008-12-24 | 2010-07-08 | Toyota Central R&D Labs Inc | 運転模擬試験装置、及びプログラム |
| JP2012098609A (ja) * | 2010-11-04 | 2012-05-24 | Ns Solutions Corp | 情報処理装置、自動車、情報処理方法及びプログラム |
| US20180204478A1 (en) * | 2015-04-29 | 2018-07-19 | Ivan Banga | Driver Education System And Method For Training In Simulated Road Emeregencies |
| JP2019008513A (ja) * | 2017-06-23 | 2019-01-17 | 学校法人幾徳学園 | バーチャルリアリティシステムおよびプログラム |
| JP2019016358A (ja) * | 2018-07-06 | 2019-01-31 | 株式会社コロプラ | 情報処理方法、プログラム及びコンピュータ |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11484790B2 (en) | Reality vs virtual reality racing | |
| US9902403B2 (en) | Sensory stimulation for an autonomous vehicle | |
| EP2914002B1 (en) | Virtual see-through instrument cluster with live video | |
| RU2735458C2 (ru) | Системы и способы генерирования стереоскопических изображений дополненной и виртуальной реальности | |
| KR102145702B1 (ko) | 게임플레이 탑승 차량 시스템 및 방법 | |
| US11493990B2 (en) | Simulation system, processing method, and information storage medium | |
| RU2646360C2 (ru) | Устройство и способ отображения изображения, мобильное устройство, система отображения изображения и компьютерная программа | |
| JP4848648B2 (ja) | 車載情報提供装置 | |
| US20130044000A1 (en) | Awakened-state maintaining apparatus and awakened-state maintaining method | |
| US20190105572A1 (en) | Drivable vehicle augmented reality game | |
| US11262848B1 (en) | Method and head-mounted device for reducing motion sickness in virtual reality | |
| WO2020161853A1 (ja) | 映像刺激提示制御装置 | |
| JP4493575B2 (ja) | 移動体シミュレータ装置およびその制御方法並びに制御プログラム | |
| KR101975565B1 (ko) | 일인칭 시점의 알씨카 레이싱 시스템 | |
| JPH09269723A (ja) | 運動知覚制御装置 | |
| KR20160146415A (ko) | 가상체험 시뮬레이션 장치 및 방법 | |
| JP2000061144A (ja) | 画像生成装置、ゲーム装置及び情報記憶媒体 | |
| JP2021091334A (ja) | 表示制御装置 | |
| JP2012048105A (ja) | 運転模擬装置及びその制御プログラム | |
| JP2009082645A (ja) | オートバイゲーム装置 | |
| KR20180122253A (ko) | 상황 정보 기반의 실감 효과 제공 장치 및 방법 | |
| JP2001154570A (ja) | 疑似体験装置及び疑似体験方法 | |
| JPH07134557A (ja) | 表示装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 19914346 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 19914346 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: JP |