WO2020021643A1 - エンドエフェクタの選択方法および選択システム - Google Patents
エンドエフェクタの選択方法および選択システム Download PDFInfo
- Publication number
- WO2020021643A1 WO2020021643A1 PCT/JP2018/027765 JP2018027765W WO2020021643A1 WO 2020021643 A1 WO2020021643 A1 WO 2020021643A1 JP 2018027765 W JP2018027765 W JP 2018027765W WO 2020021643 A1 WO2020021643 A1 WO 2020021643A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- work
- end effector
- selecting
- selection
- shape
- Prior art date
Links
Images





Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/04—Gripping heads and other end effectors with provision for the remote detachment or exchange of the head or parts thereof
Abstract
ワークに対する作業を実行するロボットに交換可能に装着され、ワークを把持するエンドエフェクタの選択方法は、ワークの形状および作業内容を含む情報を取得する取得ステップと、既知の作業におけるワークの形状および作業内容と、当該作業で選択されたエンドエフェクタの種類との関係を学習してモデルを構築する構築ステップと、ワークおよび作業内容の少なくともいずれかが新規な対象作業が実行される場合、対象作業におけるワークの形状および作業内容と、モデルとに基づいて、複数種類のエンドエフェクタから対象作業に適したエンドエフェクタを選択する選択ステップと、を含むものである。
Description
本明細書は、エンドエフェクタの選択方法および選択システムを開示する。
従来より、ワークを把持するハンド(エンドエフェクタ)を備えるロボットにおいて、複数種類のハンドから作業対象のワークに応じた適切なハンドを選択する選択方法が提案されている。例えば、特許文献1には、作業対象のワークに関する情報とハンドに関する情報とに基づいて、ワークとハンドの適合性を評価し、より適切なハンドを自動で選択することが記載されている。
上述したようなハンドの自動選択において選択ミスが生じると、ロボットが適切にワークを把持することができず、作業ミスや誤動作が生じることになる。このように、ハンドの選択は、ロボットの作業性に大きな影響を及ぼすものであるから、より適切に選択できるようにさらなる改善が求められている。
本開示は、ワークを把持するエンドエフェクタの選択をより適切に行うことを主目的とする。
本開示は、上述の主目的を達成するために以下の手段を採った。
本開示のエンドエフェクタの選択方法は、ワークに対する作業を実行するロボットに交換可能に装着され、前記ワークを把持するエンドエフェクタの選択方法であって、前記ワークの形状および作業内容を含む情報を取得する取得ステップと、既知の作業における前記ワークの形状および作業内容と、当該作業で選択された前記エンドエフェクタの種類との関係を学習してモデルを構築する構築ステップと、前記ワークおよび作業内容の少なくともいずれかが新規な対象作業が実行される場合、前記対象作業における前記ワークの形状および作業内容と、前記モデルとに基づいて、複数種類の前記エンドエフェクタから前記対象作業に適した前記エンドエフェクタを選択する選択ステップと、を含むことを要旨とする。
本開示のエンドエフェクタの選択方法では、既知の作業におけるワークの形状および作業内容と、当該作業で選択されたエンドエフェクタの種類との関係を学習してモデルを構築する。そして、作業対象のワークおよび作業内容の少なくともいずれかが新規な対象作業が実行される場合、対象作業におけるワークの形状および作業内容と、構築したモデルとに基づいて、複数種類のエンドエフェクタから対象作業に適したエンドエフェクタを選択する。これにより、作業対象のワークや作業内容が新規な対象作業であっても、既知の作業の学習で構築したモデルを用いて、ワークの形状および作業内容を考慮したエンドエフェクタの選択をより適切に行うことができる。
次に、本開示を実施するための形態について図面を参照しながら説明する。
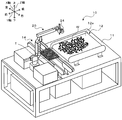
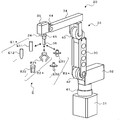
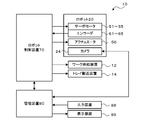
図1はロボットシステム10の構成の概略を示す構成図であり、図2はロボット20の構成の概略を示す構成図であり、図3はロボットシステム10の電気的な接続関係を示すブロック図である。なお、図1の左右方向がX軸方向であり、前後方向がY軸方向であり、上下方向がZ軸方向である。
ロボットシステム10は、ロボット20と、ロボット制御装置70と、管理装置80とを備える。ロボットシステム10は、例えばピックアンドプレースシステムとして構成されており、ワーク供給装置12により供給された機械部品や電子部品などのワークWをピッキング(保持)して、トレイ搬送装置14により搬送されたトレイT上に整列させてプレースする作業などが行われる。また、トレイT上に整列させたボルトなどのワークWに対し、ワッシャーなどの別のワークWをピッキングして、ボルトの軸部に挿入するようにプレースする作業なども行われる。なお、ロボットシステム10は、ピックアンドプレースシステムに限られず、ロボット20を用いてワークWに対して作業を行うものであれば、如何なる作業システムにも適用できる。
ロボット20は、5軸の垂直多関節アーム(以下、アームという)22を備える。アーム22は、6つのリンク31~36と、各リンクを回転または旋回可能に連結する5つの関節41~45とを有する。各関節41~45には、対応する関節を駆動するサーボモータ51~55と、対応するモータの回転位置を検出するエンコーダ61~65とが設けられている。
アーム22の先端のリンク36には、作業ツールとしての複数種のエンドエフェクタEが交換可能に装着されている。エンドエフェクタE1*は、磁性体からなるワークWを電磁石により吸着する電磁チャックであり、サイズや形状が異なる複数のタイプ(E11,E12,・・・)を有する。また、エンドエフェクタE2*は、ワークWの保持と保持の解除とを行うように開閉可能な一対のクランプ爪を有するメカニカルチャック(以下、メカチャックという)であり、クランプ爪のサイズや形状が異なる複数のタイプ(E21,E22,・・・)を有する。さらに、エンドエフェクタE3*は、ワークWを負圧によって吸着する吸着ノズルであり、吸着ノズルの径や長さが異なる複数のタイプ(E31,E32,・・・)を有する。先端のリンク36に装着されるエンドエフェクタEは、後述する自動選択処理により選択される。
また、アーム22のリンク35には、カメラ24が取り付けられている。カメラ24は、ワーク供給装置12により供給された各ワークWの位置および姿勢を認識するために当該ワークWを撮像し、トレイ搬送装置14により搬送されたトレイTの位置を認識するために当該トレイTを撮像する。
アーム22の基端のリンク31は、作業台11に固定されている。作業台11には、ワーク供給装置12やトレイ搬送装置14などが配置されている。ワーク供給装置12は、本実施形態では、前後方向(Y軸方向)に離間して配置された駆動ローラおよび従動ローラに架け渡されたコンベアベルト12aを備える。コンベアベルト12aには複数のワークWがバラ置きされ、ワーク供給装置12は、駆動ローラを回転駆動することにより、コンベアベルト12a上の複数のワークWを後方から前方へ供給する。なお、ワーク供給装置として、コンベアベルト12aに代えて或いはコンベアベルト12aに併設して、ケース(部品箱)に収容された複数のワークをケースごと供給する供給装置が設けられてもよい。トレイ搬送装置14は、コンベアベルトにより構成され、ワークWの供給方向とは直交する方向(X軸方向)にトレイTを搬送し、略中央位置にて位置決め保持する。
ロボット制御装置70は、図示は省略するが、CPUやROM、HDD、RAM、入出力インタフェース、通信インタフェースなどを備える。ロボット制御装置70には、エンコーダ61~65などからの検知信号が入力される。また、ロボット制御装置70からは、ワーク供給装置12やトレイ搬送装置14、サーボモータ51~55、アクチュエータ56などへの制御信号が出力される。なお、アクチュエータ56は、ロボット20に装着されているエンドエフェクタEを駆動するためのものである。ロボット制御装置70は、ロボット20の各サーボモータ51~55を駆動制御することにより、ロボット20に、ワークWをピッキングさせたり、ピッキングさせたワークWをプレースさせたりする。
管理装置80は、図示は省略するが、CPUやROM、HDD、RAM、入出力インタフェース、通信インタフェースなどを備える。管理装置80には、カメラ24からの画像信号や入力装置88からの入力信号などが入力される。また、管理装置80からは、カメラ24への駆動信号や表示装置89への表示信号などが出力される。ここで、入力装置88は、例えばキーボードやマウスであり、表示装置89は、例えば液晶ディスプレイである。管理装置80は、ロボット制御装置70と通信可能に接続されており、互いに制御信号や各種情報のやり取りを行う。管理装置80は、ロボット制御装置70に制御信号を送信してアーム22(カメラ24)をワーク供給装置12により供給されたワークWの撮像ポイントへ移動させ、カメラ24を駆動してワークWを撮像し、撮像された画像を入力する。続いて、管理装置80は、入力した画像を処理して画像中のワークWを認識する。そして、管理装置80は、認識したワークWのうちピッキング可能なワークWを抽出して当該ワークWをピッキングするためのエンドエフェクタEの目標位置および目標姿勢を割り出し、ロボット制御装置70に送信する。
また、管理装置80およびロボット制御装置70では、ワークWの形状や作業内容に応じたエンドエフェクタEの自動選択が可能となっている。図4はエンドエフェクタの自動選択に関する機能を示すブロック図である。図4に示すように、管理装置80は、各種情報を入力する情報入力部80Aと、入力された情報からエンドエフェクタEの選択処理を行う選択処理部80Bとを有する。情報入力部80Aは、ワークWに関するワーク情報81aやワークWに対して行われる作業内容に関する作業情報81bを含む各種情報を入力する。ワーク情報81aは、ワークWの形状や寸法、種類などの情報を含み、例えばワークWの3次元CAD情報などが入力される。なお、カメラ24で撮像された画像を処理して得られたワークWの形状や寸法などがワーク情報81aとして入力されてもよい。また、作業情報81bは、ワークWをプレースする対象の対象形状や対象寸法、ワークWをトレイT上に整列させるのかボルトの軸に挿入するかなどの作業内容の情報を含む。なお、情報入力部80Aは、作業者により入力装置88を介して入力される作業指示などから作業情報81bを取得してもよい。
選択処理部80Bは、パラメータ抽出部82と、作業DB83と、モデル構築部84と、スコア演算部85と、一覧表示部86と、候補決定部87とを有する。パラメータ抽出部82は、情報入力部80Aにより入力されたワーク情報81aや作業情報81bから特徴的なパラメータを抽出する。例えば、ワッシャーをボルトの軸に挿入する作業の場合、パラメータ抽出部82は、ワークWの形状(ワッシャー)やワッシャーの内外径の寸法、ボルトの軸径、作業内容(軸挿入)など、エンドエフェクタEの選択に必要な情報をパラメータとして抽出する。パラメータ抽出部82により抽出されたパラメータは、作業DB83に登録されると共にスコア演算部85に出力される。図5は作業DB83の一例を示す説明図である。図示するように、作業DB83は、既知の作業のワーク情報および作業情報と、当該作業で選択されたエンドエフェクタEの情報と、選択されたエンドエフェクタEの良否の判定結果(評価)とが対応付けて登録されている。既知の作業のワーク情報および作業情報には、パラメータ抽出部82により抽出されたパラメータが登録されるが、それら以外の情報が登録されてもよい。なお、良否の判定結果については後述する。
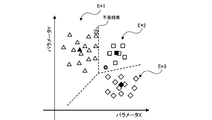
モデル構築部84は、エンドエフェクタEを自動選択するための選択モデルを構築する。このモデル構築部84は、作業DB83に登録された情報のうち特徴的なパラメータを用いた機械学習により、エンドエフェクタEの種類毎にグループ化して分類した選択モデルを構築する。機械学習は、例えば、判別分析やK近傍法などにより複数のグループに分類する公知の手法を用いて行えばよい。また、深層学習などが用いられてもよい。図6は選択モデルの一例を示す説明図である。図6では、図示の都合上、2つの特徴的なパラメータX,Yから3種類のエンドエフェクタE*1(△)、E*2(□),E*3(◇)が選択される選択モデルのイメージを示す。また、図6では、エンドエフェクタE*1(△)、E*2(□),E*3(◇)の各グループ(クラス)の値の重心などの代表値をそれぞれ代表値▲、■、◆で示し、各グループの境界の一例を点線で示す。
スコア演算部85は、パラメータ抽出部82からエンドエフェクタEの選択条件であるパラメータが入力されると、選択モデルにおけるエンドエフェクタEの各グループとの関連性を示す近似スコアを演算する。例えばスコア演算部85は、入力されたパラメータに基づく選択モデル上での該当位置(図6の◎)と、各グループの代表値▲、■、◆との間の距離としての近似スコアを演算する。このように新たな作業におけるワークWや作業内容が得られると、スコア演算部85により、既知の作業で選択された各種のエンドエフェクタEのそれぞれに対する近似スコアが演算される。一覧表示部86は、スコア演算部85による演算結果に基づいて、複数種類のエンドエフェクタEを近似スコアの高い順に表示装置89に一覧表示する。また、候補決定部87は、一覧表示されたエンドエフェクタEの中から作業者による入力装置88の操作により選択された一のエンドエフェクタEを候補に決定する。候補決定部87は、候補に決定したエンドエフェクタEの種類と、作業番号などの作業の識別情報とをロボット制御装置70に送信する。
ロボット制御装置70は、交換装着部71と、動作確認部72と、作業実行部73とを有する。交換装着部71は、候補決定部87で決定されたエンドエフェクタEを先端のリンク36に装着させる。なお、交換装着部71は、ロボット20がエンドエフェクタEを自動交換可能に構成されていれば自動で交換させ、自動交換可能でなければ作業者に交換指示を表示するなどして作業者に交換させる。動作確認部72は、候補決定部87で決定された候補のエンドエフェクタEを用いて、作業対象のワークWをピッキングさせるなどの動作の確認を行う。動作確認部72による動作の確認結果は、管理装置80に送信されて作業DB83に評価として登録される。作業実行部73は、動作確認部72による確認結果が良好とされたエンドエフェクタEを用いて実際の作業を行う。
次に、ロボットシステム10がこれらの機能を用いて、エンドエフェクタEの自動選択を行う際の処理を説明する。図7は自動選択処理の一例を示すフローチャートである。この処理は、管理装置80の上述した各機能により実行される。この処理が開始されると、管理装置80は、まず、ワークWの形状および作業内容の少なくともいずれかが新規な作業が開始されるタイミングであるか(S100)、ロボット制御装置70の動作確認部72から結果通知を受信したタイミングであるか(S105)、をそれぞれ判定する。
管理装置80は、S100で新規な作業(対象作業)が開始されるタイミングであると判定すると、ワーク情報81aや作業情報81bを入力し(S110)、それらの情報から特徴的なパラメータを抽出すると共に(S115)、作業DB83に登録する(S120)。次に、管理装置80は、選択モデルを用いて新規な作業に対する各エンドエフェクタEの近似スコアを演算し(S125)、表示装置89にスコア順に一覧表示して(S130)、作業者によるエンドエフェクタEの候補の選択操作がなされるのを待つ(S135)。
図8はエンドエフェクタの一覧表示画面89aの一例を示す説明図である。図示するように、各エンドエフェクタEがスコア順に並んで表示されると共にカーソルが指し示すエンドエフェクタEの概略図が表示されている。この一覧表示画面89aでは、作業者が入力装置88で上下操作を行う度にカーソルが上または下に移動すると共に概略図が表示されるエンドエフェクタEが変化する。また、作業者は、入力装置88で選択操作を行うと、一覧表示画面89aにおいてカーソルが指し示しているエンドエフェクタEを選択することができる。
管理装置80は、作業者による選択操作がなされると、選択されたエンドエフェクタEを候補に決定し(S140)、決定したエンドエフェクタEの種類と作業の識別情報とを含む候補決定通知をロボット制御装置70に送信して(S145)、自動選択処理を終了する。以下、管理装置80の自動選択処理の説明を中断して、ロボット制御装置70の処理を説明する。
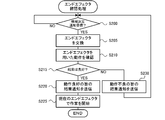
図9はエンドエフェクタ確認処理の一例を示すフローチャートである。この処理は、ロボット制御装置70により実行される。この処理では、ロボット制御装置70は、まず、候補決定通知を受信したと判定するのを待ち(S200)、候補決定通知を受信したと判定すると、候補決定通知に含まれる種類のエンドエフェクタEに交換する(S205)。なお、S205では、ロボット20による自動交換または作業者による交換が行われる。次に、ロボット制御装置70は、エンドエフェクタEを用いたワークWのピッキングなどの動作確認を行う(S210)。S210では、ロボット制御装置70は、候補とされたエンドエフェクタEを用いて、作業対象のワークWのピッキングを行い、ワークWを正常にピッキングできるか否かを判定する。ロボット制御装置70は、ワークWをピッキングできなかったり、ピッキングしてもすぐにワークWが落下したりする場合には、ワークWを正常にピッキングできないと判定する。また、S210では、ロボット制御装置70は、ワークWのピッキングだけでなく、正常にプレースできるか否かを判定してもよい。
そして、ロボット制御装置70は、動作確認の結果が良好であるか否かを判定し(S215)、良好であると判定すると、動作良好の旨の結果通知を管理装置80に送信する(S220)。この場合、候補のエンドエフェクタEを用いて作業することに支障はないから、ロボット制御装置70は、そのまま現在のエンドエフェクタEを用いて作業を開始して(S225)、エンドエフェクタ確認処理を終了する。一方、ロボット制御装置70は、動作確認の結果が不良であると判定すると、動作不良の旨の結果通知を管理装置80に送信して(S230)、S200に戻り処理を行う。この場合、候補のエンドエフェクタEを用いて作業を行うと、ワークWの落下などの作業ミスやワークWのピッキングのし直しなどが頻発して作業効率が低下するおそれがあるから、作業を開始することなく新たな候補決定通知を受信するまで待機することになる。
このようにして、ロボット制御装置70から結果通知が管理装置80に送信されると、図7の自動選択処理のS105で管理装置80は結果通知を受信したと判定し、良否結果をパラメータに対応付けて作業DB83に登録する(S150)。S150では、結果通知における動作確認結果が良好であれば、良好の旨がジョブ番号に対応付けて登録され、結果通知における動作確認結果が不良であれば、不良の旨がジョブ番号に対応付けて登録される。また、管理装置80は、登録後の作業DB83に基づいて選択モデルを構築(更新)する(S155)。S155では、新たに良否結果が登録されたエンドエフェクタEとパラメータの関係を選択モデルに反映させることができるから、選択モデルの信頼性を向上させることができる。なお、図5の作業番号**2では、先に選択したエンドエフェクタE*2の確認結果が不良で、再選択したエンドエフェクタE*1の確認結果が良好であった場合を例示している。また、図6では、E*2(□)のエンドエフェクタEを選択した際の不良結果を×印を付加して示している。本実施形態では、動作確認結果が良好の結果と不良の結果とをいずれも反映させた選択モデルを構築するため、各グループの境界をより精度よく設定することが可能となる。そして、管理装置80は、動作確認結果が不良であるか否かを判定し(S160)、動作確認結果が不良でなく良好であると判定すると、そのまま自動選択処理を終了する。
一方、管理装置80は、S160で動作確認結果が不良であると判定すると、S155で構築した選択モデルを用いて各エンドエフェクタEの近似スコアを再演算し(S165)、選択済みのエンドエフェクタEを除いてスコア順に一覧表示する(S170)。図8の例でスコア順1のエンドエフェクタE22が選択されたものの動作確認結果が不良であった場合、管理装置80は、選択済みのエンドエフェクタE22を除いた他のエンドエフェクタEを、再演算されたスコア順に一覧表示することになる。そして、管理装置80は、作業者によって選択されたエンドエフェクタEをロボット制御装置70に送信するS135~S145の処理を実行する。これにより、一旦選択したものの動作確認結果が不良であったエンドエフェクタEを除いた他のエンドエフェクタEの中から、適切なエンドエフェクタEを再選択させることができる。各エンドエフェクタEの近似スコアは、動作確認結果を反映して構築された選択モデルを用いて再演算されるから、各エンドエフェクタEをより適切に一覧表示した中から作業者に選択させることが可能となる。
ここで、本実施形態の構成要素と本開示の構成要素との対応関係を明らかにする。本実施形態のロボット20がロボットに相当し、エンドエフェクタEがエンドエフェクタに相当し、図7の自動選択処理のS110が取得ステップに相当し、同処理のS155が構築ステップに相当し、同処理のS115~S140が選択ステップに相当する。また、エンドエフェクタ確認処理のS210が確認ステップに相当する。また、図7の自動選択処理のS110を実行する情報入力部80Aが取得部に相当し、同処理のS155を実行するモデル構築部84が構築部に相当し、同処理のS115~S140を実行するパラメータ抽出部82とスコア演算部85と一覧表示部86と候補決定部87とが選択部に相当する。
以上説明したロボットシステム10は、作業におけるワークWの形状および作業内容と、構築した選択モデルとに基づいて、複数種類のエンドエフェクタEから新規な作業に適したエンドエフェクタEを選択する。これにより、既知の作業の学習で構築したモデルを用いて、ワークWの形状および作業内容を考慮したエンドエフェクタEの選択をより適切に行うことができる。
また、複数種類のエンドエフェクタについて近似スコアを算出してスコア順に表示装置89に一覧表示し、作業者による選択に従ってエンドエフェクタEを選択するから、スコア順に作業者の経験などによる判断を加えて、エンドエフェクタEの選択をさらに適切に行うことができる。
また、選択されたエンドエフェクタEの動作を確認し、その確認結果の良否を対応付けて選択モデルを構築するから、選択モデルの信頼性を高めて、エンドエフェクタEの選択の精度をより向上させることができる。
また、確認結果が不良であった場合、再構築された選択モデルを用いて、既に選択されたエンドエフェクタEを除いた複数種類のエンドエフェクタEから再選択を行うことができるから、再選択の精度をより向上させることができる。
なお、本発明は上述した実施形態に何ら限定されることはなく、本発明の技術的範囲に属する限り種々の態様で実施し得ることはいうまでもない。
例えば、上述した実施形態では、選択されたエンドエフェクタEの動作の確認結果が不良であった場合、更新された選択モデルを用いて近似スコアを再度演算した上でエンドエフェクタEの再選択を行うものとしたが、これに限られるものではない。例えば、近似スコアを再度演算することなく、前回の近似スコアを用いて、既に選択されたエンドエフェクタEを除いた中からエンドエフェクタEの再選択を行うものなどとしてもよい。
上述した実施形態では、スコア順にエンドエフェクタEを一覧表示して作業者に選択させるものとしたが、これに限られず、スコア順に基づいて管理装置80が選択するものとしてもよい。図10は変形例の自動選択処理を示すフローチャートである。図10では、図7と同じ処理には同じステップ番号を付して説明を省略する。管理装置80は、S125で選択モデルを用いて近似スコアを演算すると、スコア順が最も上位のエンドエフェクタEを候補に決定する(S140a)。このため、図8の例では、エンドエフェクタE22が自動的に候補に決定されることになる。また、管理装置80は、ロボット制御装置70から受信した結果が不良であるとS160で判定すると、既に選択されたエンドエフェクタEを除いてスコア順が最も上位のエンドエフェクタEに決定する(S168)。このため、図8の例では、エンドエフェクタE21が自動的に候補に決定されることになる。なお、図10においても、図7と同様に、更新された選択モデルを用いて近似スコアを演算し直してから、S168の処理を実行するものとしてもよい。
上述した実施形態では、候補に選択されたエンドエフェクタEの動作を確認することによりエンドエフェクタEの良否を判定してから作業を開始するものとしたが、これに限られず、エンドエフェクタEの良否を判定することなく作業を開始するものなどとしてもよい。その場合、確認結果が不良であった場合のエンドエフェクタEの再選択も行わないものとすればよい。ただし、ワークWの落下などの作業ミスやワークWのピッキングのし直しなどを防ぐために、候補に選択されたエンドエフェクタEの良否を作業開始前に判定するものが好ましい。
上述した実施形態では、特徴的なパラメータから選択モデルにおけるエンドエフェクタEの種類毎の近似スコアを演算し、近似スコアの高いエンドエフェクタEを優先的に選択するものなどとしたが、これに限られるものではない。既知の作業におけるワークWの形状および作業内容と、その作業で選択されたエンドエフェクタEとの関係を学習して構築された選択モデルを用いて、新規な作業のエンドエフェクタEを選択するものであれば如何なる処理でエンドエフェクタEを選択してもよい。
上述した実施形態では、ワーク情報81aにワークWの形状以外に寸法や種類などを含むものとしたが、少なくともワークWの形状を含むものであればよい。また、作業情報81bにワークWをプレースする対象形状や対象寸法などを含むものとしたが、少なくともどのような作業を行うかの作業内容を含むものであればよい。
ここで、本開示のコンピュータによるエンドエフェクタの選択方法および選択システムは、以下のように構成してもよい。例えば、本開示のエンドエフェクタの選択方法において、前記選択ステップでは、前記対象作業における前記ワークの形状および作業内容と、前記モデルとに基づいて、複数種類の前記エンドエフェクタについて前記対象作業との関連性を示すスコアを算出してスコア順に一覧表示し、作業者による選択に従って前記エンドエフェクタを選択するものとしてもよい。こうすれば、エンドエフェクタのスコア順に、作業者の経験などによる判断を加えてエンドエフェクタを選択することも可能となるから、エンドエフェクタの選択をさらに適切に行うことができる。
本開示のエンドエフェクタの選択方法において、前記選択ステップでは、前記対象作業における前記ワークの形状および作業内容と、前記モデルとに基づいて、複数種類の前記エンドエフェクタについて前記対象作業との関連性を示すスコアを算出し、スコアの高い前記エンドエフェクタを優先的に選択するものとしてもよい。こうすれば、構築したモデルを用いた簡易な処理で、エンドエフェクタの選択をより適切に行うことができる。
本開示のエンドエフェクタの選択方法において、前記選択ステップで選択された前記エンドエフェクタによる前記ワークの把持動作の良否を確認する確認ステップを含み、前記構築ステップでは、前記確認ステップの確認結果が得られると、前記対象作業における前記ワークの形状および作業内容と、前記選択ステップで選択された前記エンドエフェクタの種類との関係に前記確認結果の良否を対応付けて前記モデルを構築するものとしてもよい。こうすれば、モデルの信頼性を高めることができるから、エンドエフェクタの選択の精度をより向上させることができる。
本開示のエンドエフェクタの選択方法において、前記選択ステップでは、前記確認ステップの確認結果が不良であった場合、既に選択された前記エンドエフェクタを除いた複数種類の前記エンドエフェクタから前記対象作業に適した前記エンドエフェクタを再選択するものとしてもよい。こうすれば、確認結果の良否を対応付けて構築されたモデルを用いてエンドエフェクタの再選択を行うことができるから、再選択の精度をより向上させることができる。
本開示のエンドエフェクタの選択システムは、ワークに対する作業を実行するロボットに交換可能に装着され、前記ワークを把持するエンドエフェクタの選択システムであって、前記ワークの形状および作業内容を含む情報を取得する取得部と、既知の作業における前記ワークの形状および作業内容と、当該作業で選択された前記エンドエフェクタの種類との関係を学習してモデルを構築する構築部と、作業対象のワークおよび作業内容の少なくともいずれかが新規な対象作業が実行される場合、前記対象作業における前記ワークの形状および作業内容と、前記モデルとに基づいて、複数種類の前記エンドエフェクタから前記対象作業に適した前記エンドエフェクタを選択する選択部と、を備えることを要旨とする。
本開示のエンドエフェクタの選択システムは、上述した選択方法と同様に、作業対象のワークや作業内容が新規な対象作業であっても、既知の作業の学習で構築したモデルを用いて、ワークの形状および作業内容を考慮したエンドエフェクタの選択をより適切に行うことができる。なお、この選択システムにおいて、上述した選択方法の各ステップを実現するような機能を追加してもよい。
本発明は、ロボットシステムの製造産業などに利用可能である。
10 ロボットシステム、11 作業台、12 ワーク供給装置、12a コンベアベルト、14 トレイ搬送装置、20 ロボット、22 アーム、24 カメラ、31~36 リンク、41~45 関節、51~55 サーボモータ、56 アクチュエータ、61~65 エンコーダ、70 ロボット制御装置、71 交換装着部、72 動作確認部、73 作業実行部、80 管理装置、80A 情報入力部、80B 選択処理部、81a ワーク情報、81b 作業情報、82 パラメータ抽出部、83 作業DB、84 モデル構築部、85 スコア演算部、86 一覧表示部、87 候補決定部、88 入力装置、89 表示装置、89a 一覧表示画面、E,E1*~E3*,E11,E12,E21,E22,E31,E32 エンドエフェクタ、T トレイ、W ワーク。
Claims (6)
- ワークに対する作業を実行するロボットに交換可能に装着され、前記ワークを把持するエンドエフェクタの選択方法であって、
前記ワークの形状および作業内容を含む情報を取得する取得ステップと、
既知の作業における前記ワークの形状および作業内容と、当該作業で選択された前記エンドエフェクタの種類との関係を学習してモデルを構築する構築ステップと、
前記ワークおよび作業内容の少なくともいずれかが新規な対象作業が実行される場合、前記対象作業における前記ワークの形状および作業内容と、前記モデルとに基づいて、複数種類の前記エンドエフェクタから前記対象作業に適した前記エンドエフェクタを選択する選択ステップと、
を含むエンドエフェクタの選択方法。 - 請求項1に記載のエンドエフェクタの選択方法であって、
前記選択ステップでは、前記対象作業における前記ワークの形状および作業内容と、前記モデルとに基づいて、複数種類の前記エンドエフェクタについて前記対象作業との関連性を示すスコアを算出してスコア順に一覧表示し、作業者による選択に従って前記エンドエフェクタを選択する
エンドエフェクタの選択方法。 - 請求項1に記載のエンドエフェクタの選択方法であって、
前記選択ステップでは、前記対象作業における前記ワークの形状および作業内容と、前記モデルとに基づいて、複数種類の前記エンドエフェクタについて前記対象作業との関連性を示すスコアを算出し、スコアの高い前記エンドエフェクタを優先的に選択する
エンドエフェクタの選択方法。 - 請求項1ないし3のいずれか1項に記載のエンドエフェクタの選択方法であって、
前記選択ステップで選択された前記エンドエフェクタによる前記ワークの把持動作の良否を確認する確認ステップを含み、
前記構築ステップでは、前記確認ステップの確認結果が得られると、前記対象作業における前記ワークの形状および作業内容と、前記選択ステップで選択された前記エンドエフェクタの種類との関係に前記確認結果の良否を対応付けて前記モデルを構築する
エンドエフェクタの選択方法。 - 請求項4に記載のエンドエフェクタの選択方法であって、
前記選択ステップでは、前記確認ステップの確認結果が不良であった場合、既に選択された前記エンドエフェクタを除いた複数種類の前記エンドエフェクタから前記対象作業に適した前記エンドエフェクタを再選択する
エンドエフェクタの選択方法。 - ワークに対する作業を実行するロボットに交換可能に装着され、前記ワークを把持するエンドエフェクタの選択システムであって、
前記ワークの形状および作業内容を含む情報を取得する取得部と、
既知の作業における前記ワークの形状および作業内容と、当該作業で選択された前記エンドエフェクタの種類との関係を学習してモデルを構築する構築部と、
前記ワークおよび作業内容の少なくともいずれかが新規な対象作業が実行される場合、前記対象作業における前記ワークの形状および作業内容と、前記モデルとに基づいて、複数種類の前記エンドエフェクタから前記対象作業に適した前記エンドエフェクタを選択する選択部と、
を備えるエンドエフェクタの選択システム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2018/027765 WO2020021643A1 (ja) | 2018-07-24 | 2018-07-24 | エンドエフェクタの選択方法および選択システム |
| JP2020531883A JP7133017B2 (ja) | 2018-07-24 | 2018-07-24 | エンドエフェクタの選択方法および選択システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2018/027765 WO2020021643A1 (ja) | 2018-07-24 | 2018-07-24 | エンドエフェクタの選択方法および選択システム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2020021643A1 true WO2020021643A1 (ja) | 2020-01-30 |
Family
ID=69180973
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2018/027765 WO2020021643A1 (ja) | 2018-07-24 | 2018-07-24 | エンドエフェクタの選択方法および選択システム |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP7133017B2 (ja) |
| WO (1) | WO2020021643A1 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021177538A (ja) * | 2020-05-07 | 2021-11-11 | ▲たい▼昇科技股▲分▼有限公司 | 搬送用保持具の自動交換機構 |
| EP4101584A1 (de) * | 2021-06-08 | 2022-12-14 | Dürr Assembly Products GmbH | Vorrichtung zum greifen länglicher befestigungselemente aus einem ungeordneten lager |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009148845A (ja) * | 2007-12-19 | 2009-07-09 | Olympus Corp | 小型生産設備 |
| JP2013052490A (ja) * | 2011-09-06 | 2013-03-21 | Mitsubishi Electric Corp | ワーク取り出し装置 |
| JP2015044274A (ja) * | 2013-08-29 | 2015-03-12 | 三菱電機株式会社 | 部品供給装置および部品供給装置のプログラム生成方法 |
| WO2015178377A1 (ja) * | 2014-05-20 | 2015-11-26 | 株式会社日立製作所 | 組立教示装置及び方法 |
| JP2017030135A (ja) * | 2015-07-31 | 2017-02-09 | ファナック株式会社 | ワークの取り出し動作を学習する機械学習装置、ロボットシステムおよび機械学習方法 |
| US20170265392A1 (en) * | 2014-08-26 | 2017-09-21 | Vineland Research and Innovations Centre Inc. | Mushroom Harvester |
| JP6325174B1 (ja) * | 2017-04-04 | 2018-05-16 | 株式会社Mujin | 制御装置、ピッキングシステム、物流システム、プログラム、制御方法、及び、生産方法 |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009117732A (ja) | 2007-11-09 | 2009-05-28 | Panasonic Corp | ノズル |
-
2018
- 2018-07-24 WO PCT/JP2018/027765 patent/WO2020021643A1/ja active Application Filing
- 2018-07-24 JP JP2020531883A patent/JP7133017B2/ja active Active
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009148845A (ja) * | 2007-12-19 | 2009-07-09 | Olympus Corp | 小型生産設備 |
| JP2013052490A (ja) * | 2011-09-06 | 2013-03-21 | Mitsubishi Electric Corp | ワーク取り出し装置 |
| JP2015044274A (ja) * | 2013-08-29 | 2015-03-12 | 三菱電機株式会社 | 部品供給装置および部品供給装置のプログラム生成方法 |
| WO2015178377A1 (ja) * | 2014-05-20 | 2015-11-26 | 株式会社日立製作所 | 組立教示装置及び方法 |
| US20170265392A1 (en) * | 2014-08-26 | 2017-09-21 | Vineland Research and Innovations Centre Inc. | Mushroom Harvester |
| JP2017030135A (ja) * | 2015-07-31 | 2017-02-09 | ファナック株式会社 | ワークの取り出し動作を学習する機械学習装置、ロボットシステムおよび機械学習方法 |
| JP2017064910A (ja) * | 2015-07-31 | 2017-04-06 | ファナック株式会社 | ワークの取り出し動作を学習する機械学習装置、ロボットシステムおよび機械学習方法 |
| JP6325174B1 (ja) * | 2017-04-04 | 2018-05-16 | 株式会社Mujin | 制御装置、ピッキングシステム、物流システム、プログラム、制御方法、及び、生産方法 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021177538A (ja) * | 2020-05-07 | 2021-11-11 | ▲たい▼昇科技股▲分▼有限公司 | 搬送用保持具の自動交換機構 |
| EP4101584A1 (de) * | 2021-06-08 | 2022-12-14 | Dürr Assembly Products GmbH | Vorrichtung zum greifen länglicher befestigungselemente aus einem ungeordneten lager |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2020021643A1 (ja) | 2021-08-02 |
| JP7133017B2 (ja) | 2022-09-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4174342B2 (ja) | ワーク搬送装置 | |
| JP5382359B2 (ja) | ロボットシステム | |
| EP2540456A1 (en) | Robotic picking of parts from a parts holding bin | |
| TW201710043A (zh) | 遠端操作機器人系統及其運轉方法 | |
| US10293499B2 (en) | Movable robot | |
| US11305432B2 (en) | Work machine and pick-up position selection method | |
| CN110076751B (zh) | 机器人控制装置及机器人系统 | |
| CN114286740B (zh) | 作业机器人以及作业系统 | |
| CN110871441A (zh) | 感测系统、作业系统、增强现实图像的显示方法、以及存储有程序的存储介质 | |
| WO2020021643A1 (ja) | エンドエフェクタの選択方法および選択システム | |
| JP2021185016A (ja) | 画像処理装置 | |
| CN110405729B (zh) | 机器人控制装置 | |
| JP5198161B2 (ja) | ハンドリング装置およびワークハンドリング方法 | |
| JP7373028B2 (ja) | シミュレーション方法、シミュレーションシステム | |
| EP3722053A1 (en) | Control device, workpiece operation device, workpiece operation system, and control method | |
| CN111278612B (zh) | 元件移载装置 | |
| CN111899629A (zh) | 柔性机器人教学系统和方法 | |
| WO2023105637A1 (ja) | 産業機械の動作を検証するための装置、及び方法 | |
| CN114800483B (zh) | 机器人的控制方法和机器人系统 | |
| WO2022269706A1 (ja) | ロボットシステムで発生した異常に対する手順を提供する異常処理装置、ネットワークシステム、及び方法 | |
| WO2022013935A1 (ja) | ロボットシステム | |
| CN112010021B (zh) | 工件搬运系统、工件定位系统及其定位方法 | |
| JP2020199631A (ja) | ジョブ作成装置 | |
| US20220232747A1 (en) | Component mounting machine |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 18927356 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2020531883 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 18927356 Country of ref document: EP Kind code of ref document: A1 |