WO2019026574A1 - Information providing control device and information providing control program - Google Patents
Information providing control device and information providing control program Download PDFInfo
- Publication number
- WO2019026574A1 WO2019026574A1 PCT/JP2018/026140 JP2018026140W WO2019026574A1 WO 2019026574 A1 WO2019026574 A1 WO 2019026574A1 JP 2018026140 W JP2018026140 W JP 2018026140W WO 2019026574 A1 WO2019026574 A1 WO 2019026574A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- presentation
- vibration
- behavior
- information
- vehicle
- Prior art date
Links
- 230000008859 change Effects 0.000 claims abstract description 59
- 230000001133 acceleration Effects 0.000 claims description 50
- 238000000034 method Methods 0.000 claims description 39
- 238000012545 processing Methods 0.000 claims description 16
- 230000008569 process Effects 0.000 description 34
- 230000007704 transition Effects 0.000 description 32
- 238000010586 diagram Methods 0.000 description 29
- 210000002683 foot Anatomy 0.000 description 27
- 230000009471 action Effects 0.000 description 18
- 230000033001 locomotion Effects 0.000 description 17
- 230000006698 induction Effects 0.000 description 16
- 239000000463 material Substances 0.000 description 14
- 230000006870 function Effects 0.000 description 13
- 210000003371 toe Anatomy 0.000 description 11
- 238000003780 insertion Methods 0.000 description 10
- 230000037431 insertion Effects 0.000 description 10
- 230000004048 modification Effects 0.000 description 9
- 238000012986 modification Methods 0.000 description 9
- 230000002093 peripheral effect Effects 0.000 description 8
- 230000007246 mechanism Effects 0.000 description 7
- 230000035945 sensitivity Effects 0.000 description 6
- 230000000392 somatic effect Effects 0.000 description 6
- 210000003813 thumb Anatomy 0.000 description 5
- 238000001514 detection method Methods 0.000 description 4
- 210000003811 finger Anatomy 0.000 description 4
- 210000000452 mid-foot Anatomy 0.000 description 4
- 239000002131 composite material Substances 0.000 description 3
- 230000007423 decrease Effects 0.000 description 3
- 230000006866 deterioration Effects 0.000 description 3
- 230000005284 excitation Effects 0.000 description 3
- 239000007769 metal material Substances 0.000 description 3
- 230000000630 rising effect Effects 0.000 description 3
- 230000035807 sensation Effects 0.000 description 3
- 238000013461 design Methods 0.000 description 2
- 210000000454 fifth toe Anatomy 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- 230000010349 pulsation Effects 0.000 description 2
- 230000001360 synchronised effect Effects 0.000 description 2
- 208000019901 Anxiety disease Diseases 0.000 description 1
- JOYRKODLDBILNP-UHFFFAOYSA-N Ethyl urethane Chemical compound CCOC(N)=O JOYRKODLDBILNP-UHFFFAOYSA-N 0.000 description 1
- ATJFFYVFTNAWJD-UHFFFAOYSA-N Tin Chemical compound [Sn] ATJFFYVFTNAWJD-UHFFFAOYSA-N 0.000 description 1
- 230000036506 anxiety Effects 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 238000012508 change request Methods 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 230000008602 contraction Effects 0.000 description 1
- 230000008034 disappearance Effects 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 210000000744 eyelid Anatomy 0.000 description 1
- 210000000887 face Anatomy 0.000 description 1
- 238000007667 floating Methods 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 239000010985 leather Substances 0.000 description 1
- 210000004932 little finger Anatomy 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 238000005457 optimization Methods 0.000 description 1
- 230000001902 propagating effect Effects 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 239000011347 resin Substances 0.000 description 1
- 229920005989 resin Polymers 0.000 description 1
- 230000000284 resting effect Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
Images



























Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60N—SEATS SPECIALLY ADAPTED FOR VEHICLES; VEHICLE PASSENGER ACCOMMODATION NOT OTHERWISE PROVIDED FOR
- B60N3/00—Arrangements or adaptations of other passenger fittings, not otherwise provided for
- B60N3/06—Arrangements or adaptations of other passenger fittings, not otherwise provided for of footrests
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/10—Input arrangements, i.e. from user to vehicle, associated with vehicle functions or specially adapted therefor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/20—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor
- B60K35/25—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor using haptic output
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/20—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor
- B60K35/28—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor characterised by the type of the output information, e.g. video entertainment or vehicle dynamics information; characterised by the purpose of the output information, e.g. for attracting the attention of the driver
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/08—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to drivers or passengers
- B60W40/09—Driving style or behaviour
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W50/16—Tactile feedback to the driver, e.g. vibration or force feedback to the driver on the steering wheel or the accelerator pedal
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K26/00—Arrangements or mounting of propulsion unit control devices in vehicles
- B60K26/02—Arrangements or mounting of propulsion unit control devices in vehicles of initiating means or elements
- B60K26/021—Arrangements or mounting of propulsion unit control devices in vehicles of initiating means or elements with means for providing feel, e.g. by changing pedal force characteristics
- B60K2026/022—Arrangements or mounting of propulsion unit control devices in vehicles of initiating means or elements with means for providing feel, e.g. by changing pedal force characteristics with tactile feedback from a controller, e.g. vibrations
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K2360/00—Indexing scheme associated with groups B60K35/00 or B60K37/00 relating to details of instruments or dashboards
- B60K2360/16—Type of output information
- B60K2360/178—Warnings
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K26/00—Arrangements or mounting of propulsion unit control devices in vehicles
- B60K26/02—Arrangements or mounting of propulsion unit control devices in vehicles of initiating means or elements
- B60K26/021—Arrangements or mounting of propulsion unit control devices in vehicles of initiating means or elements with means for providing feel, e.g. by changing pedal force characteristics
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60N—SEATS SPECIALLY ADAPTED FOR VEHICLES; VEHICLE PASSENGER ACCOMMODATION NOT OTHERWISE PROVIDED FOR
- B60N2/00—Seats specially adapted for vehicles; Arrangement or mounting of seats in vehicles
- B60N2/90—Details or parts not otherwise provided for
- B60N2002/981—Warning systems, e.g. the seat or seat parts vibrates to warn the passenger when facing a danger
Definitions
- the present disclosure relates to a technology of information presentation control for presenting information to a user of a vehicle.
- Patent Document 1 discloses a footrest for moving a footrest, a sheet for moving a backrest, and the like.
- the footrest and the seat can notify the user of the contents of the future behavior change of the autonomously traveling vehicle before the occurrence of the behavior change by the movement of the footrest and the backrest.
- the actual vehicle deceleration starts after the footrest is tilted backward as a notice of deceleration.
- the mechanism for moving the footrest of the footrest, the backrest of the seat, etc. is easily enlarged. Therefore, it could be difficult to secure the mountability to a vehicle.
- An object of the present disclosure is to provide an information presentation control device capable of notifying a user through somatic feeling while ensuring mountability of a configuration for information presentation on a vehicle.
- An information presentation control device is an information presentation control device that presents information to a user by control of vibrating a plurality of presentation surface portions provided to be in contact with a user boarding a vehicle capable of automatic driving. And an information acquisition unit that acquires behavior information indicating a future behavior of the vehicle traveling autonomously, a behavior determination unit that determines whether or not a behavior change to be presented to the user occurs in the vehicle based on the behavior information, and a behavior determination And a presentation control unit configured to individually control the vibrations of the plurality of presentation surfaces and to notify the driver in advance of the contents of the presentation behavior change before occurrence of the presentation behavior change determined to be presented by the unit.
- An information presentation control program is an information presentation control program for presenting information to a user by control of vibrating a plurality of presentation surface portions provided to be in contact with a user boarding a vehicle capable of automatic driving.
- To determine whether a change in behavior to be presented to the user occurs in the vehicle based on the information acquisition unit that acquires behavior information indicating the future behavior of the autonomously traveling vehicle and at least one processing unit.
- the behavior judgment unit and the vibration of a plurality of presentation surface units are individually controlled before occurrence of the presentation behavior change determined to be presented by the behavior judgment unit, and the driver is notified beforehand of the contents of the presentation behavior change It functions as a control unit.
- An information presentation control method is an information presentation control method for presenting information to a user by control of vibrating a plurality of presentation surface portions provided to be in contact with a user boarding a vehicle capable of automatic driving). Acquiring the behavior information indicating the future behavior of the autonomously traveling vehicle, determining whether or not the behavior change to be presented to the user is generated in the vehicle based on the behavior information, and presenting the behavior determination unit Controlling the vibration of the plurality of presentation surfaces individually before the occurrence of the presentation behavior change determined to be to be performed, and notifying the driver of the content of the presentation behavior change in advance.
- the vibrations of the plurality of presentation surfaces are individually controlled, it is possible to notify the user of the contents of the behavior change that will occur in the vehicle traveling autonomously in the future.
- the mechanism for moving the footrest, the seat, etc. can be omitted if the behavior can be notified by vibration in the future. Therefore, while ensuring the mountability of the configuration for information presentation to the vehicle, it becomes possible to notify the user of the behavior change through the somatic feeling.
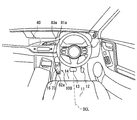
- FIG. 1 is a view showing a layout around a driver's seat of a vehicle, showing a footrest device mounted on a vehicle
- FIG. 2 is a block diagram showing a vibration presentation system including a footrest device together with a vehicle system etc.
- FIG. 3 is a perspective view showing the structure of the footrest device
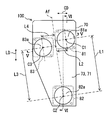
- FIG. 4 is a plan view of the footrest device, showing the arrangement of the presentation surface portion on the mounting surface
- 5 is a cross-sectional view taken along the line V-V of FIG. FIG.
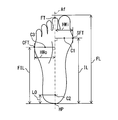
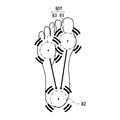
- FIG. 6 is a diagram showing the relationship between the points of the soles and their distances necessary to define the arrangement of the presentation surfaces
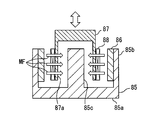
- FIG. 7 is a diagram showing the structure and operation principle of the vibration speaker
- FIG. 8 is a state transition diagram showing an overview of transition of the operation mode of the footrest device
- FIG. 9 is a flowchart showing the details of a request degree presentation process of switching the vibration interval in the request degree presentation mode according to the driving participation request degree
- FIG. 10A is a diagram showing control of the vibration speaker when the driving participation request degree is “low” in the request degree presentation mode
- FIG. 10B is a time chart showing control of the vibration speaker when the degree of driving participation request is “low” in the request degree presentation mode
- FIG. 10A is a diagram showing control of the vibration speaker when the driving participation request degree is “low” in the request degree presentation mode
- FIG. 10B is a time chart showing control of the vibration speaker when the degree of driving participation request is “low” in the request degree presentation mode
- FIG. 10A is a
- FIG. 11A is a diagram showing control of the vibration speaker when the driving participation request degree is “high” in the request degree presentation mode
- FIG. 11B is a diagram of a time chart showing control of the vibration speaker when the degree of driving participation request in the request degree presentation mode is “high”
- FIG. 12A is a diagram showing details of control of each vibration speaker in the driving action induction mode
- FIG. 12B is a diagram of a time chart showing details of control of each vibration speaker in the driving action induction mode
- FIG. 13 is a flowchart showing details of transition control processing for controlling switching of the operation mode between the request degree presentation mode and the prior presentation mode
- FIG. 14 is a flowchart showing the details of the prior presentation process of switching the control of each vibration speaker in the prior presentation mode according to the content of the behavior change scheduled in the travel plan
- FIG. 15A is a diagram showing control of each vibration speaker in the acceleration operation presentation
- FIG. 15B is a diagram of a time chart showing control of each vibration speaker in the acceleration operation presentation
- FIG. 16A is a diagram showing control of each vibration speaker in the deceleration operation presentation
- FIG. 16B is a diagram of a time chart showing control of each vibration speaker in the deceleration operation presentation
- FIG. 17A is a diagram showing control of each vibration speaker in the right turn presentation
- FIG. 17B is a diagram of a time chart showing control of each vibration speaker in the right turn presentation
- FIG. 18A is a diagram showing control of each vibration speaker in the left turning motion presentation
- FIG. 18B is a diagram of a time chart showing control of each vibration speaker at the time of presentation of a left turn
- FIG. 19A is a diagram showing control of the vibration speaker in the requested degree presentation mode according to the second embodiment
- FIG. 19B is a diagram of a time chart showing control of the vibration speaker in the requested degree presentation mode according to the second embodiment
- FIG. 20A is a diagram showing control of each vibration speaker in the right turning operation presentation according to the second embodiment
- FIG. 20B is a diagram of a time chart showing control of each vibration speaker in the right turning operation presentation according to the second embodiment
- FIG. 21A is a diagram showing control of each vibration speaker in the left turning operation presentation according to the second embodiment
- FIG. 21B is a diagram of a time chart showing control of each vibration speaker at the time of presenting the left turning motion according to the second embodiment
- FIG. 22A is a diagram showing control of each vibration speaker at the time of presenting the right turn operation according to the third embodiment
- FIG. 22B is a diagram of a time chart showing control of each vibration speaker at the time of presenting the right turn operation according to the third embodiment
- FIG. 23A is a diagram showing control of each vibration speaker in the left turning operation presentation according to the third embodiment
- FIG. 23B is a diagram of a time chart showing control of each vibration speaker in the left turning operation presentation according to the third embodiment
- FIG. 24A is a diagram showing control of each vibration speaker in composite action presentation
- FIG. 24B is a diagram of time charts showing control of the respective vibration speakers in composite action presentation.
- the function of the information presentation control device is realized by a human machine interface control unit (HCU) 40.
- the HCU 40 constitutes a vibration presentation system together with the footrest device 100 and the drive device 60 and the like.
- the vibration presentation system is mounted on a vehicle capable of autonomous driving, and performs information presentation to a user (hereinafter referred to as a driver) seated on the driver's seat 11 of the vehicle by vibration.
- the footrest device 100 is one of a plurality of HMI (Human Machine Interface) devices mounted on a vehicle.
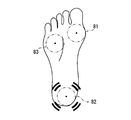
- the footrest device 100 has a plurality of presentation surface portions 81a to 83a on a mounting surface 73 on which the placement of the soles of the driver riding the vehicle is assumed.
- the footrest device 100 presents information mainly related to the automatic driving of the vehicle through the sense of the sole of the driver, specifically the sense of vibration, by the vibration of the presentation surface portions 81a to 83a.
- the footrest device 100 is formed in a longitudinal plate shape as a whole.
- the footrest device 100 is attached to the mounting portion 16 provided on the vehicle in a posture in which the mounting surface 73 on which the left foot of the driver is placed is directed to the driver's seat 11 side.
- the longitudinal direction LD of the mounting surface 73 is along a vertical cross section perpendicular to the front-rear direction and the vertical direction of the vehicle.
- the width direction (also referred to as the short side direction) CD of the mounting surface 73 is along the left-right direction of the vehicle.
- the mounting surface 73 is inclined upward as it goes from the rear to the front of the vehicle.
- the footrest device 100 is configured of a footrest base 70 and a plurality of (three) vibration speakers 81 to 83 and the like.
- the vibration speakers 81 to 83 are also referred to as first to third vibration speakers, respectively.
- the footrest base 70 is fixed to the mounting portion 16 of the vehicle by a fastening member such as a bolt.
- the footrest base 70 is configured of an upper cover member 71, a lower base plate 76, a base cushioning material 78, a speaker cushioning material 79, and the like.
- the upper cover member 71 is formed by affixing a thin plate-like decorative plate 72 on the bottom surface of a base having a shallow container shape with a bottom.
- the upper cover member 71 is formed of a metal material as a whole.
- the upper cover member 71 has a support wall 71a and a bottom wall 71b.
- the support wall 71a is provided on the outer edge of the bottom wall 71b, and is erected substantially perpendicularly to the bottom wall 71b.
- the support wall 71 a defines the distance between the bottom wall 71 b and the lower base plate 76.
- the bottom wall 71 b forms a mounting surface 73 which is long and flat.
- the bottom wall 71 b is provided with an insertion opening 74.
- the insertion opening 74 is a perfect circular opening that penetrates the bottom wall portion 71 b including the decorative plate 72 in the thickness direction. Three insertion openings 74 are opened in the bottom wall portion 71b in a mutually space
- the lower base plate 76 is formed in a flat plate shape by a metal material.
- the outer shape of the lower base plate 76 is substantially the same as the bottom wall 71 b of the upper cover member 71.
- the lower base plate 76 is located on the opposite side of the mounting surface 73 with respect to the upper cover member 71.
- the top of the support wall 71 a is in contact with the outer edge of the lower base plate 76.
- the lower base plate 76 holds the three vibration speakers 81 to 83 individually.
- the base cushioning material 78 is formed of, for example, urethane or the like in a sheet shape thicker than the lower base plate 76.
- the base cushioning material 78 is disposed between the lower base plate 76 and the mounting portion 16 in a compressed state in the thickness direction.
- the footrest base 70 is firmly fixed to the mounting portion 16 via the base cushioning material 78.
- the vibration of the lower base plate 76 caused by the operation of each vibration speaker 81 to 83 is considered to be fixed end reflection at the boundary between the lower base plate 76 and the base cushioning material 78.
- the vibration of the footrest base 70 is reduced by the substantial cancellation of the incident wave and the reflected wave that are in antiphase with each other.
- the speaker cushioning material 79 is formed in a cylindrical shape by, for example, a sponge or the like which is excellent in flexibility.
- the speaker cushioning material 79 is externally fitted to a member (for example, a screw, a bolt, a pin, or the like) that fixes the vibration speakers 81 to 83 to the lower base plate 76.
- the speaker cushioning material 79 functions as an elastic body between the vibration speakers 81 to 83 and the lower base plate 76, and reflects the vibration generated in each of the vibration speakers 81 to 83 at its free end. As a result, the amplitude of the composite wave (the standing wave) of the incident wave and the reflected wave in the same phase is increased.
- the vibration speakers 81 to 83 are held by the lower base plate 76 in a mutually spaced arrangement.
- the vibration speakers 81 to 83 are fixed in a floating state from the lower base plate 76 by the interposition of the speaker cushioning material 79.
- the vibration speakers 81 to 83 have presentation surface portions 81a to 83a, respectively.
- the presentation surface portions 81a to 83a vibrate in a direction substantially perpendicular to the mounting surface 73, and vibrate the sole of the driver placed on the mounting surface 73.
- the vibration of the presentation surface portions 81a to 83a is a push-up vibration that pushes up the bottom of the driver's footwear, and can be transmitted to the driver's sole through the driver's footwear.
- the vibrations of the individual presentation surfaces 81a to 83a are individually controlled.
- the presentation surface portions 81a to 83a are exposed through the respective insertion openings 74 at places different from each other on the placement surface 73.
- the presentation surface portions 81a to 83a project further than the upper cover member 71 in the direction in which the placement surface 73 faces.
- the presentation surface portions 81a to 83a are exposed to the placement surface 73 in a mutually offset arrangement with respect to each of the longitudinal direction LD and the width direction CD.
- the two presentation surfaces 81a and 82a are arranged along the longitudinal direction LD of the mounting surface 73, and the two presentation surfaces 81a and 83a are arranged along the width direction CD of the mounting surface 73.
- the presentation surface 83a is located between the presentation surface 81a and the presentation surface 82a in the longitudinal direction LD, and the presentation surface 82a is located between the presentation surface 81a and the presentation surface 83a in the width direction CD. doing.
- the presentation surface portions 81a to 83a are respectively the heel center C2, the base of the thumb (hereinafter, the ball ball center C1) and the base of the little finger (hereinafter, the small finger ball center C3) It is placed in a position where you can touch naturally.
- the presentation surface part 81a is provided in the range where placement of the center C1 of the ball of the driver of the driver and the periphery (the ball part of the finger) on the placement surface 73 is assumed.
- the presentation surface portion 82 a is provided in a range where placement of the crucible center C 2 and the periphery (ridge portion) thereof is assumed on the placement surface 73.
- the presentation surface portion 83a is provided in a range in which placement of the little toe ball center C3 and the periphery (the little toe portion) on the placement surface 73 is assumed.
- a foot length FL, a heel point HP, a second finger tip FT, a shin side middle foot point SFP and a heel side middle foot point CFP can be defined on the sole. Then, a virtual line connecting the heel point HP and the second finger tip FT is the foot axis Af. Further, the distance between the heel point HP and the shin mid-foot point SFP is the inner non-step length IL, and the distance between the heel point HP and the mid-side mid-foot point CFP is the outer non-step length FIL. Furthermore, the distance between the shin side midfoot point SFP and the foot axis Af is within the half foot width HWi, and the distance between the heel side midfoot point CFP and the foot axis Af is half foot outside HWo.
- the heel center C2 is defined from the heel point HP at a position on the foot axis Af which is “foot length FL ⁇ 0.18 (refer to L0)” in the toe direction.
- the ball ball center C1 is a position "inward step length IL” in the toe direction from the heel point HP, and is a position "in in half foot width HWi x 0.5" in the inward direction of the foot.
- the small toe ball center C3 is a position "outside step length FIL" in the toe direction from the heel point HP, and is a position "half foot width outside x 0.5" in the outward direction of the foot.
- the presentation surface 82a is assumed to excite the crucible center C2, and is disposed at a position closer to the rear end than the front end, of both ends of the mounting surface 73 in the longitudinal direction LD.
- the positions of the presentation surface portions 81a and 83a are defined based on a state in which the eyebrow center C2 overlaps the center of the presentation surface portion 82a.
- the center of the presentation surface 81a assumed to excite the ball C1 is disposed at a position L1 from the center of the presentation surface 82a to the tip of the toe and at a position L2 in the inward direction of the foot from the foot axis Af It is done.
- L1 is a value obtained by subtracting L0 (see FIG. 6) from the inner step length IL, and is defined to, for example, about 136.8 mm.
- L2 is half the value of HWi within the half width, and is defined to be, for example, 23.1 mm.
- the center of the presentation surface 83a assumed to excite the small toe ball center C3 is disposed at a position L3 from the center of the presentation surface 82a in the toe direction and at a position L4 from the foot axis Af outward of the foot ing.
- L3 is a value obtained by subtracting L0 (see FIG. 6) from the outer non-stepping length FIL, and is defined to, for example, about 112.9 mm.
- L4 is half the value of the half-foot-wide HWo, and is defined to be, for example, about 26.9 mm.
- the dimensions L1 to L4 are an example of values based on the data of the foot size measurement business report published by the Japan Leather Industry Association.
- the protrusion amounts of the presentation surface portions 81a to 83a from the insertion opening 74 are different from each other.
- the protrusion amount of the presentation surface portion 83a in the vibration speaker 83 far from the center line DCL (see FIG. 1) of the driver's seat 11 along the longitudinal direction of the vehicle is larger than the protrusion amount of the presentation surface portion 81a in the vibration speaker 81 near the center line DCL It is done.
- the protrusion amount of the presentation surface portion 83a provided in the outer range of the mounting surface 73 where the placement of the outer part of the sole is assumed is the placement surface where the placement of the inner part of the sole is assumed It is larger than the protrusion amount of the presentation surface 81 a provided in the inner area 73.
- the protrusion amount of the presentation surface 82a in the vibration speaker 82 is larger than the protrusion amount of the presentation surface 81a, 83a in the other vibration speakers 81, 83.
- the vibration speakers 81 to 83 are configured by a housing 84, a yoke 85, a vibrating body 87, an attachment 89, and the like, as shown in FIGS.
- the housing 84 is formed in a container shape, for example, of a resin material or the like.
- the housing 84 has a flat square pole shape.
- the housing 84 accommodates the yoke 85 and the vibrator 87.
- the yoke 85 is formed of a magnetic metal material in a bottomed container shape.
- the yoke 85 is formed with a bottom wall 85a, an outer peripheral wall 85b, and a central wall 85c.
- a magnet 86 is provided on the inner peripheral side of the outer peripheral wall 85 b.
- the magnet 86 forms a magnetic field MF which goes around the outer peripheral wall 85 b, the center wall 85 c and the bottom wall 85 a.
- the vibrating body 87 is formed in a cylindrical shape with a bottom.
- a coil 88 is provided on the outer peripheral surface of the cylindrical wall 87 a of the vibrating body 87.
- the coil 88 is arranged in the magnetic field MF formed by the yoke 85 and the magnet 86.
- a drive signal is applied to the coil 88 by any one of the amplifiers 62a to 62c of the drive device 60. By applying the drive signal to the coil 88, an electromagnetic force in the axial direction acts on the vibrating body 87.
- the vibrating body 87 is axially displaced relative to the yoke 85 to exert a stress on the attachment 89.
- the attachment 89 is formed of a flexible material such as a rubber material.
- the attachment 89 is attached to the housing 84 and blocks the opening of the housing 84.
- the attachment 89 forms presentation surface portions 81a to 83a which are convexly curved.
- the curvature of the cross section of the attachment 89 gradually decreases from the outer edge toward the radial center.
- each of the presentation surface portions 81a to 83a brings the central portion into surface contact with the bottom surface (foot sole) of the footwear.
- the height of the attachment 89 is different for each of the vibration speakers 81 to 83. By making the heights of the attachments 89 different, the amount of protrusion of the presentation surface portions 81a to 83a from the insertion opening 74 is adjusted.
- the drive device 60 operates the footrest device 100 based on a control signal input from the HCU 40, as shown in FIG.
- the driving device 60 is configured to drive the respective vibration speakers 81 to 83 of the footrest device 100, and includes a plurality of (three) digital-analog converters (hereinafter, D / A converters) 61a to 61c; And amplifiers 62a to 62c).
- D / A converters digital-analog converters
- the number of D / A converters 61a to 61c and amplifiers 62a to 62c is equal to the number of vibration speakers 81 to 83 so that the vibrations of the presentation surfaces 81a to 83a of the vibration speakers 81 to 83 can be individually controlled. I do.
- the D / A converters 61a to 61c are electric circuits that convert digital type electric signals into analog type electric signals.
- the D / A converters 61a to 61c are electrically connected to the HCU 40 and the amplifiers 62a to 62c.
- the D / A converters 61a to 61c convert control signals input from the HCU 40 into analog signals, and output the converted signals to the amplifiers 62a to 62c.
- the amplifiers 62a to 62c are electric circuits that output a voltage or current proportional to the input signal.
- the amplifiers 62a to 62c are electrically connected to the D / A converters 61a to 61c and the vibration speakers 81 to 83, respectively.
- the amplifiers 62a to 62c generate drive signals by amplifying analog signals input from the D / A converters 61a to 61c.
- the amplifiers 62a to 62c drive the vibration speakers 81 to 83 by applying the generated drive signals to the vibration speakers 81 to 83.
- the HCU 40 is one of a plurality of electronic control units mounted on a vehicle, as shown in FIGS. 1 and 2.
- the HCU 40 is electrically connected to the drive device 60 and controls the operation of the footrest device 100 together with the drive device 60.
- the HCU 40 is communicably connected to the in-vehicle network 30.
- the HCU 40 acquires information from the vehicle system 20 via the in-vehicle network 30.
- the vehicle system 20 includes an electronic control unit that enables autonomous traveling of the vehicle, various on-vehicle sensors that detect the state of the vehicle, and communication devices that communicate with the outside of the vehicle.
- the control circuit of the HCU 40 mainly includes a computer having a processing unit 41, a storage unit 42, a RAM 43, and the like.
- the processing unit 41 is configured to include at least one of a central processing unit (CPU), a graphics processing unit (GPU), and a field-programmable gate array (FPGA).
- the processing unit 41 executes various arithmetic processing.
- the storage unit 42 is configured to include a non-volatile storage medium.
- the storage unit 42 stores various programs including an information presentation control program so that the processing unit 41 can read them.
- a random access memory (RAM) 43 is a volatile semiconductor memory.
- the RAM 43 functions as a work area of calculation processing by the processing unit 41.
- the HCU 40 constructs a plurality of functional blocks by causing the processing unit 41 to execute the information presentation program stored in the storage unit 42. Specifically, in the HCU 40, an information acquisition unit 51, a mode transition control unit 52, a signal output unit 53, and the like are constructed as functional blocks that control the footrest device 100.
- the information acquisition unit 51 acquires various information related to the vehicle, such as map data around the vehicle, current vehicle speed data, and steering angle data, from the vehicle system 20.
- the information acquisition unit 51 can acquire various information of a system related to the automatic driving of the vehicle (hereinafter, an automatic driving system).
- the information acquisition unit 51 acquires status information indicating start and stop of the automatic driving function, and a travel plan for realizing autonomous traveling by the automatic driving function.
- status information of the automatic driving system for example, information indicating the reception sensitivity of positioning signals transmitted from positioning satellites of the Global Navigation Satellite System (GNSS), status information indicating the detection status of external sensors such as cameras and lidar, etc. Is acquired by the information acquisition unit 51.
- GNSS Global Navigation Satellite System
- the mode transition control unit 52 switches the operation of the footrest device 100 based on the information acquired by the information acquisition unit 51. Specifically, the mode transition control unit 52 starts information presentation using the footrest device 100 with switching from manual operation to automatic operation (automatic operation ON) based on status information of automatic operation. Then, with the switching from the automatic driving to the manual driving (automatic driving OFF), the information presentation using the footrest device 100 is stopped.
- the mode transition control unit 52 switches the operation mode of the footrest device 100. Specifically, in the mode transition control unit 52, two request degree presentation modes, a driving behavior induction mode and a preceding presentation mode are set in advance as a plurality of operation modes (see FIG. 8). The mode transition control unit 52 causes the operation mode of the footrest device 100 to transition based on the information acquired by the information acquisition unit 51. When the manual operation is switched to the automatic operation, the mode transition control unit 52 first selects the request degree presentation mode.
- the demand degree presentation mode is an operation mode that presents the degree of demand for driving participation to the driver from the automatic driving function, and generates a simulated heartbeat of the automatic driving system, and is reproduced by the vibration of the presentation surface 82a. This is an operation mode in which the driver is biofeedbacked.
- the mode transition control unit 52 determines the degree of request for the driver's participation in driving based on the state information of the automatic driving system.
- the mode transition control unit 52 determines that the driving participation degree is "high". The mode transition control unit 52 switches between a requested degree presentation mode in which the requested degree of driving participation is “low” and a requested degree presentation mode in which the requested degree of driving participation is “high” based on the degree of requested degree of driving participation. .
- the driving behavior induction mode is an operation mode that urges a driver who is away from driving behavior during automatic driving to start driving behavior.
- the mode transition control unit 52 causes the operation mode to transition from the requested degree presentation mode to the driving action induction mode when the automatic driving system is in the specific state.
- the specific state is a state in which a drive change request (Take-Over Request) from the automatic driving function to the driver is generated in the travel plan.
- a driving shift request is generated.
- the driving behavior induction mode causes the operation mode to transition from the driving behavior induction mode to the request degree presentation mode with the end of the predefined induction operation.
- the advance presentation mode is an operation mode in which the driver is notified in advance of the contents of the behavior change that will occur before the behavior change occurs in the autonomously traveling vehicle.
- the mode transition control unit 52 changes the behavior to be presented to the driver (hereinafter referred to as presentation behavior change), for example, after several seconds (about 1 to 3 seconds) based on the travel plan showing the future behavior of the autonomously traveling vehicle. It is determined whether or not it occurs in the vehicle.
- presentation behavior change for example, after several seconds (about 1 to 3 seconds) based on the travel plan showing the future behavior of the autonomously traveling vehicle. It is determined whether or not it occurs in the vehicle.
- a scene where a presentation behavior change occurs (hereinafter, referred to as a prior presentation scene) is, for example, a scene in which the driver performs acceleration / deceleration such as anxiety, and turning to the left and right and lane change.
- the mode transition control unit 52 changes the operation mode from the request degree presentation mode to the advance presentation mode when the advance presentation scene is scheduled in the travel plan. Then, in the advance presentation mode, a notice of the contents of the presentation behavior change using the plurality of presentation surface parts 81a to 83a is carried out, and the notice is ended before the behavior change of the vehicle occurs. When the presentation operation of the future behavior corresponding to the presentation behavior change is finished, the mode transition control unit 52 causes the operation mode to transition from the preceding presentation mode to the request degree presentation mode.
- the signal output unit 53 generates a control signal for controlling the operation of the footrest device 100. Control signals corresponding to each operation mode are defined in advance in the signal output unit 53. The signal output unit 53 generates a control signal corresponding to the operation mode selected by the mode transition control unit 52 and the information acquired by the information acquisition unit 51, and directs the generated control signal to the drive device 60. Output.
- the request degree presentation process shown in FIG. 9 is started by the signal output unit 53 by the transition of the operation mode to the request degree presentation mode accompanying the start of the automatic driving.
- the request degree presentation process is repeated by the signal output unit 53 until the automatic operation is stopped.
- the signal output unit 53 operates the respective vibration speakers 81 to 83 in the vibration pattern defined in the driving action induction mode or the advance presentation mode. Prioritize.
- the setting of the interval Tin1 (see FIGS. 10A and 10B) in the case where the degree of driving participation request is “low” is acquired from the storage unit 42 as the initial setting, and the process proceeds to S102.
- the interval Tin1 may be a value preset at the time of design of the system, or may be a value set by the user of the vehicle.
- S102 based on the status information of the automatic driving acquired by the information acquiring unit 51, it is determined whether the automatic driving is in the on state. If it is determined in S102 that the automatic driving is in the OFF state, the process proceeds to S108, and the operation of the vibration speakers 81 to 83 is stopped. On the other hand, when it is determined in S102 that the automatic driving on state is continued, the process proceeds to S103.
- S103 the operation of the vibration speaker 82 is started with the setting of the acquired latest interval (see FIG. 10A, FIG. 10B and FIG. 11A, FIG. 11B), and the process proceeds to S104.
- S104 the latest driving participation request degree determined by the mode transition control unit 52 is acquired, and the process proceeds to S105.
- S105 it is determined whether the driving participation request degree acquired in S104 is "high". When the driving participation request degree acquired in S104 is "high”, the process proceeds from S105 to S106. On the other hand, when the driving participation request degree acquired in S104 is "low”, the process proceeds from S105 to S107.
- the setting of the interval Tin2 (see FIGS. 11A and 11B) when the degree of driving participation request is “high” is acquired from the storage unit 42, and the process returns to S102.
- the interval Tin2 in this case may also be a value preset at the time of system design, or may be a value set by the user of the vehicle, as in the case where the degree of driving participation request is "low”.
- the setting of the interval Tin1 (see FIGS. 10A and 10B) in the case where the degree of driving participation request is “low” is acquired from the storage unit 42, and the process proceeds to S102.
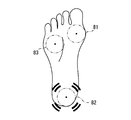
- the request degree presentation mode when the driving participation request degree is "low” and the request degree presentation mode when the driving participation request degree is "high” are risk occurrence and disappearance It switches according to the state change of the automatic driving system resulting from. Details of control of the vibration speaker 82 in the request degree presentation mode will be described based on FIG. 10A, FIG. 10B and FIG. 11A and FIG. 11B.
- each requested degree presentation mode only the vibration speaker 82 provided to be in contact with the heel portion operates, and the two vibration speakers 81 and 83 on the toe side maintain the stopped state.
- the signal output unit 53 causes the vibration speaker 82 to generate pulsation by control of repeating on and off of the vibration of the vibration speaker 82, and presents the driver with the state of the automatic driving system. Pulsation is a vibration that mimics the human heartbeat.
- the on time Ton of the vibration of the vibration speaker 82 is substantially the same regardless of the driving participation request level.
- one rectangular wave is input as a drive signal from the drive device 60 to the vibration speaker 82.
- the push-up vibration of the vibration speaker 82 due to the input of the rectangular wave can remind the driver of a feeling close to the heartbeat of a human heart.
- the vibration intervals Tin1 and Tin2 are changed according to the level of the driving participation request degree as described above.
- the interval Tin2 when the driving participation request degree is “high” is defined shorter than the interval Tin1 when the driving participation request degree is “low”. That is, the off time of the vibration when the driving participation request degree is “high” is shorter than the off time when the driving participation request degree is “low”.
- the signal output unit 53 discretely changes the intervals Tin1 and Tin2 so that the off time is shorter as the request degree is higher based on the level of the operation participation request degree as the system state information.
- the cycle of pulsing the presentation surface 82a is varied.
- the "higher degree of request” includes “the state of high request degree".
- the vibration at interval Tin1 when the degree of driving participation request is “low” is set based on the heart rate at a human resting time (for example, about 60 times per minute), specifically about 1 hertz Is repeated.
- the vibration due to the interval Tin 2 when the driving participation request level is “high” is set based on the heart rate at the time of rising of the human (for example, about 160 times per minute), specifically 2.6 hertz It is repeated by the degree.
- the transition from the demand degree presentation mode to the driving behavior induction mode is mainly performed based on the driving shift request from the autonomous driving system.
- the number of presentation surface portions 81a to 83a to be vibrated is increased compared to the request degree presentation mode.
- the three vibration speakers 81 to 83 are synchronously controlled, and the on and off timings of the vibrations in the three presentation surface portions 81a to 83a are synchronized.
- the signal output unit 59 causes all the vibration speakers 81 to 83 to repeat the on and off of the vibration.
- the time ratio (on-duty ratio) occupied by the on-time Ton in the drive signal is set to, for example, about 15%.
- the signal waves input to each of the vibration speakers 81 to 83 in the on time Ton of the driving action induction mode are continuous triangular waves whose falling time is shorter than the rising time.
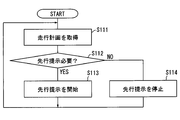
- the transition control process shown in FIG. 13 is started by the HCU 40 along with the start of the automatic operation in the same manner as the request degree presentation process (see FIG. 9), and performs transition of the operation mode between the request degree presentation mode and the preceding presentation mode. .
- the transition control process is repeated by the HCU 40 until the automatic operation is stopped.
- the travel plan formulated by the automatic driving function is acquired, and the process proceeds to S112.
- S112 based on the travel plan acquired in S111, it is determined whether or not the prior presentation is necessary.
- the process proceeds from S112 to S113.
- S113 by switching from the request degree presentation mode to the advance presentation mode, the footrest device 100 starts an advance presentation, and the process returns to S111.
- S114 the advance presentation is stopped by switching from the advance presentation mode to the request degree presentation mode, and the process returns to S111.
- the preceding presentation process shown in FIG. 14 is started.
- the advance presentation process the advance presentation scene scheduled next is determined, and an actuation corresponding to the next vehicle behavior is set.
- S121 based on whether or not an acceleration exceeding the acceleration threshold is to be generated in the forward direction of the vehicle, it is determined whether or not the presentation of the acceleration operation is necessary. When it is determined that the acceleration in the forward direction in the assumed preceding presentation scene is equal to or less than the acceleration threshold and the presentation of the acceleration operation is unnecessary, the process proceeds from S121 to S123. On the other hand, when it is determined that the acceleration in the forward direction of the vehicle exceeds the acceleration threshold, the process proceeds from S121 to S122. In S122, the footrest device 100 starts the advance presentation operation (hereinafter referred to as acceleration operation presentation, see FIGS. 15A and 15B) for giving a notice of the acceleration operation of the vehicle, and ends the advance presentation process.
- acceleration operation presentation hereinafter referred to as acceleration operation presentation, see FIGS. 15A and 15B
- S123 based on whether or not an acceleration exceeding the deceleration threshold is to be generated in the backward direction of the vehicle, it is determined whether or not the presentation of the deceleration operation is necessary. When it is determined that the backward acceleration in the assumed preceding presentation scene is equal to or less than the deceleration threshold and presentation of the deceleration operation is unnecessary, the process proceeds from S123 to S125. On the other hand, when it is determined that the backward acceleration of the vehicle exceeds the deceleration threshold, the process proceeds from S123 to S124. In S124, the footrest device 100 starts the advance presentation operation (hereinafter referred to as deceleration operation presentation, see FIGS. 16A and 16B) for giving a notice of the deceleration operation of the vehicle, and the advance presentation process is ended.
- deceleration operation presentation see FIGS. 16A and 16B
- S125 based on whether acceleration exceeding the turning threshold is to be generated in the right direction of the vehicle, it is determined whether it is necessary to present the turning operation in the right direction. If it is determined that the acceleration in the right direction in the assumed preceding presentation scene is equal to or less than the turning threshold and presentation of the turning operation in the right direction is required, the process proceeds from S125 to S126.
- the footrest device 100 causes the footrest device 100 to start an advance presentation operation (hereinafter, right rotation operation presentation, see FIGS. 17A and 17B) for giving a notice of right rotation operation of the vehicle, and ends the advance presentation process.
- an advance presentation operation hereinafter, right rotation operation presentation, see FIGS. 17A and 17B
- the process proceeds from S125 to S127.
- the footrest device 100 starts the advance presentation operation (hereinafter referred to as left rotation operation presentation, see FIG. 18A, FIG. 18B) for giving a notice of the left rotation operation of the vehicle, and ends the advance presentation process.
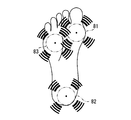
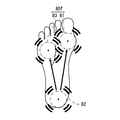
- the acceleration operation presentation shown in FIGS. 15A and 15B is performed when it is determined that the vehicle is accelerated in the forward direction.
- vibration speakers 81 and 83 (hereinafter referred to as front speaker group 80f) disposed on the front side of the driver and in the front direction of the vehicle are integrally and synchronously controlled.
- the signal output unit 59 alternately vibrates the vibration speaker 82 disposed on the rear side of the vehicle on the heel side of the driver and the above-described front speaker group 80f at predetermined time intervals.
- the time interval from the stop of the vibration of the vibration speaker 82 to the start of the vibration of the front speaker group 80f is the first off time T1f.
- the time interval from the stop of the vibration of the front speaker group 80f to the start of the vibration of the vibration speaker 82 is the second off time T2f.
- the signal output unit 59 sets the first off time T1f shorter than the second off time T2f. By setting each of the off times T1f and T2f, the vibration of the series of vibration speakers 81 to 83 reminds the driver of an image pushed forward.
- the deceleration operation presentation shown in FIGS. 16A and 16B is performed when it is determined that the vehicle is accelerated in the backward direction. Even in the deceleration operation presentation, the front speaker group 80f is integrally and synchronously controlled. The signal output unit 59 alternately vibrates the front speaker group 80 f and the vibration speaker 82 at time intervals different from the acceleration operation presentation.
- the time interval from the stop of the vibration of the front speaker group 80f to the start of the vibration of the vibration speaker 82 is taken as a first off time T1b.
- the time interval from the stop of the vibration of the vibration speaker 82 to the start of the vibration of the front speaker group 80f is taken as a second off time T2b.
- the signal output unit 59 sets the first off time T1b shorter than the second off time T2b.
- the on time of the vibration of the front speaker group 80f and the on time of the vibration of the vibration speaker 82 are substantially the same.
- the vibration intensity (amplitude) of the front speaker group 80f and the vibration intensity (amplitude) of the vibration speaker 82 are also substantially the same.
- the right turn operation presentation shown in FIGS. 17A and 17B is performed when it is determined that acceleration in the right direction is generated in the vehicle.
- the right turn motion presentation only the two vibration speakers 81, 82 aligned in the width direction CD operate, and the vibration speaker 82 on the heel side maintains the stop state.
- the signal output unit 59 alternately vibrates the two vibration speakers 81 and 82 at predetermined time intervals.
- the time interval from the stop of the vibration of the vibration speaker 83 located on the left to the start of the vibration of the vibration speaker 83 located on the right is taken as the first off time T1r.
- the time interval from the stop of the vibration of the vibration speaker 81 located on the right to the start of the vibration of the vibration speaker 83 located on the left is taken as a second off time T2r.
- the signal output unit 59 sets the first off time T1r to be shorter than the second off time T2r. By setting each of the off times T1r and T2r, the vibration of the series of vibration speakers 81 and 82 reminds the driver of an image moving to the right.
- the left turn action presentation shown in FIGS. 18A and 18B is performed when it is determined that acceleration in the left direction occurs in the vehicle.
- the signal output unit 53 alternately vibrates the two vibration speakers 81 and 82 at a predetermined time interval while maintaining the stop state of the vibration speaker 82 on the heel side also in the left turning motion presentation.
- the time interval from the stop of the vibration of the vibration speaker 81 located on the right side of the two to the start of the vibration of the vibration speaker 83 located on the left side of the two is the first off time T1l. Be done.
- the time interval from the stop of the vibration of the vibration speaker 83 located on the left to the start of the vibration of the vibration speaker 81 located on the right is taken as the second off time T21.
- the signal output unit 59 sets the first off time T1 l shorter than the second off time T2 l. By setting each of the off times T11 and T21, the vibration of the series of vibration speakers 81 and 82 reminds the driver of an image moving to the left.
- the on time and strength (amplitude) of the vibration of the two vibration speakers 81 and 83 are substantially the same. Furthermore, the signal waves input to the respective vibration speakers 81 to 83 in each presentation operation are continuous triangular waves whose fall time is shorter than the rise time. With such a waveform of the drive signal, vibrations that push up the sole are transmitted from the respective presentation surface portions 81a to 83a to respective positions on the sole.
- the vibrations of the plurality of presentation surfaces 81a to 83a are individually controlled, it is possible to notify the driver of the contents of the behavior change that will occur to the autonomously traveling vehicle in the future.
- the mechanism for moving the footrest or the like can be omitted if the behavior can be notified by vibration in the future. Therefore, while ensuring the mountability of the configuration for information presentation to the vehicle, it becomes possible to notify the user of the behavior change through the somatic feeling.
- the posture of the driver sitting on the driver's seat 11 changes temporarily, and the posture of the footrest can be changed even if a large gap occurs in the driver's trunk.
- the ease of transmission of the information presentation to the driver as compared to the changing form can be maintained. That is, the information presentation by vibration is easier to ensure tolerance to trunk displacement than the information presentation by the posture change of the footrest.
- the signal output unit 53 sets at least two of the plurality of presentation surface units 81 a to 83 a along the direction of the acceleration to be generated. Vibrate alternately. According to such control, even if the footrest device 100 has a simple configuration, the driver can be easily notified of the direction of the acceleration generated in the vehicle by the future behavior change.
- the first off time T1f from the stop of the vibration of the vibration speaker 82 to the start of the vibration of the front speaker group 80f is the start of the vibration of the vibration speaker 82 after the stop of the vibration of the front speaker group 80f. It is defined to be shorter than the second off time T2f.
- each of the first off-times T1 b, T1 r, T1 l is shorter than the respective second off-times T2 b, T2 r, T2 l in each of the deceleration action presentation, the right turning action presentation, and the left turning action presentation. .
- the longitudinal and lateral directions of the acceleration to be generated in the vehicle Can be notified to the person in a more understandable manner.
- the advance notice of the contents of the behavior change due to the vibration of each of the presentation surface portions 81a to 83a is ended before the behavior change occurs in the vehicle.
- the driver can easily grasp the timing from the advance notice to the start of the behavior change. Therefore, the notification of the behavior change to the driver through somatic sensation can be information presentation that is easy for the driver to understand.
- the HCU 40 corresponds to the “information presentation control device”
- the mode transition control unit 52 corresponds to the “behavior determination unit”
- the signal output unit 53 corresponds to the “presentation control unit”.
- the travel plan corresponds to "behavior information”.
- presentation surface part 81a, 83a corresponds to a "1st presentation surface part”
- the other (remaining) presentation surface part 82a corresponds to a "2nd presentation surface part.”
- the presentation surface 82a corresponds to the "first presentation surface”
- the presentation surfaces 81a and 83a correspond to the "second presentation surface”.
- the presentation surface 81a corresponds to the "first presentation surface” and the presentation surface 83a corresponds to the "second presentation surface”
- the presentation surface 83a is It corresponds to a "1st presentation surface part”
- the presentation surface part 81a corresponds to a "2nd presentation surface part.”
- the second embodiment of the present disclosure shown in FIGS. 19A to 21B is a modification of the first embodiment.
- the vibration patterns of the respective vibration speakers 81 to 83 are different from those of the first embodiment.
- the magnitude of the amplitude is also changed according to the request degree of the driving participation.
- the amplitude see solid line
- the amplitude when the degree of request for driving participation is “high” is from the amplitude (see the alternate long and short dashed line) when the degree of request for driving participation is “low”. Is also enlarged.
- the vibration of the three vibration speakers 81 to 83 is simultaneously started.
- the on time Tonr for continuing the vibration of the vibration speaker 81 is set to about twice the on time Tonl for continuing the vibration of the vibration speakers 82 and 83. It is done. That is, after the vibration of the vibration speakers 81 to 83 is started, the signal output unit 53 (see FIG. 2) stops the vibration of the vibration speakers 82 and 83 earlier than the vibration speaker 81.
- the vibration of the series of vibration speakers 81 to 83 makes use of the aftermath of the vibration of the vibration speakers 82 and 83 stopped earlier to move the image moving rightward to the driver. Remind me.
- the vibration patterns of the vibration speakers 81 to 83 may be repeated a plurality of times at predetermined time intervals as the right turning operation presentation.
- the on time Ton1 for continuing the vibration of the vibration speaker 83 is set to about twice the on time Tonr for continuing the vibration of the vibration speakers 81 and 82. That is, after the vibration of the vibration speakers 81 to 83 is started, the signal output unit 53 (see FIG. 2) stops the vibration of the vibration speakers 81 and 82 earlier than the vibration speaker 83.
- the vibration of the series of vibration speakers 81 to 83 uses the afterglow of the vibration of the vibration speakers 81 and 82 to be stopped first to move the image moving in the left direction to the driver. Remind me.
- the vibration patterns of the vibration speakers 81 to 83 may be repeated a plurality of times at predetermined time intervals as the left turning motion presentation.
- the vibration of the vibration speaker 82 is stopped earlier than the front speaker group 80f.
- the vibration of the front speaker group 80f is stopped earlier than the vibration speaker 82.
- the third embodiment of the present disclosure shown in FIGS. 22A, 22B and 23A, 23B is a modification of the second embodiment.
- the vibration speakers 81 and 83 vibrate, and the vibration speaker 82 maintains the stop state.
- the on-time Tonr for continuing the vibration of the vibration speaker 81 is set to about twice the on-time Tonl for continuing the vibration of the vibration speaker 83.
- the signal output unit 53 see FIG.
- the on time Ton1 for continuing the vibration of the vibration speaker 83 is set to about twice the on time Tonr for continuing the vibration of the vibration speaker 81. That is, the signal output unit 53 (see FIG. 2) stops the vibration of the presentation surface 81a faster than the presentation surface 83a after simultaneously causing the vibrations of both the presentation surface 83a and the presentation surface 81a. From the above, the driver may recall an image moving in the left direction from the contrast between the continuation of the vibration of the presentation surface 81a stopped earlier and the vibration of the presentation surface 83a continued.
- the contents of the behavior change to the user through the somatic sensation by using the afterglow of the vibration speakers 81 to 83 whose vibration is stopped. Notification of is possible.
- the vibration patterns of the vibration speakers 81 and 83 may be repeated a plurality of times with a predetermined time interval as the right turning operation presentation and the left turning operation presentation.
- the acceleration operation presentation and the deceleration operation presentation in the third embodiment may be substantially the same as those in the second embodiment.
- the footrest device is provided with an adjustment mechanism capable of adjusting the relative position of each vibration speaker with respect to the lower base plate for each vibration speaker.
- the adjustment mechanism is provided between the lower base plate and the housing of each vibration speaker, and moves the position of the presentation surface by extension and contraction in the direction perpendicular to the mounting surface.
- the adjustment function adjusts the amount of protrusion of the presentation surface relative to the upper cover member.
- the function of the adjustment mechanism allows the presentation surface to be given priority to the driver, for example, to be appropriately changed according to the information to be presented to the driver.
- the adjustment mechanism may be built in each vibration speaker.
- each presentation surface is exposed to the mounting surface so as to abut on the sole.
- each vibration speaker which is a vibration presentation speaker does not need to have a presentation surface part exposed to a mounting surface.
- Each of the vibration speakers can individually vibrate different places on the mounting surface while being accommodated between the upper cover member and the lower base plate.
- the configuration for propagating the vibration of the vibration speaker to the sole on the mounting surface may be provided integrally with the upper cover member forming the mounting surface.
- the attachment of the embodiment is formed in a flat convex spherical shape that forms a convexly curved presentation surface.
- the attachment may, for example, be in the form of a flat cone or a square pyramid, or may be in the form of a flat cylinder forming a planar presentation surface.
- the surface of the presentation surface may be smooth.
- a concavo-convex or convex pattern or the like that functions as a slip stopper may be formed on the presentation surface.
- the excitation point is adjusted by making the apex position of the attachment eccentric with respect to the center of the vibration speaker. The optimization of may be made.
- a gap may be secured between the inner peripheral wall of the insertion opening and the outer peripheral wall of the attachment to prevent the propagation of vibration from the attachment to the upper cover member.
- a flexible material that hardly transmits vibration may be provided between the attachment and the inner peripheral wall of the insertion opening.
- a bowl-shaped portion that blocks the insertion opening from the mounting surface side or the lower base surface side may be provided on the outer periphery of the attachment.
- all the presentation surfaces were protruded from the upper cover member. However, at least a part of the presentation surface may be flush with the outer surface of the bottom wall of the upper cover member.
- the protrusion amount of each presentation surface may be changed as appropriate, and the ball area of the ball of the thumb or the area of the pinky ball may be larger than that of the heel area. Furthermore, the protrusion amount of each presentation surface may be substantially the same as one another.
- three presentation surfaces are provided on the mounting surface.
- the positions of these three presentation surfaces may be changed as appropriate.
- an area closer to the lower end than the upper end is set as a range where placement of the heel portion of the user is assumed, and the presentation surface 82a (see FIG. 4) is appropriately changed in position within this range. It is also good.
- an area closer to the upper end than the lower end and closer to the inner end than the outer end is set as a range where placement of the user's thumb ball portion is assumed, and the presentation surface 81a (see FIG. 4) May be appropriately changed within this range.
- an area closer to the upper end than the lower end and closer to the outer end than the inner end is a range where placement of the user's thumb ball portion is assumed, and the presentation surface 83a (see FIG. 4)
- the position may be changed as appropriate within this range.
- the presentation surface part 83a provided in the outer side range of a mounting surface may be provided in the position which can excite the toe part outside rather than the small toe ball part of a foot sole rather than an arch.
- the number of presentation surface parts provided on the placement surface is not limited to three.
- only two presentation surface parts may be provided on the placement surface in an arrangement aligned along the longitudinal direction or the width direction.
- four or more presentation surfaces may be provided on the placement surface.
- two presentation surface parts that excite the torus ball center C1 and the small toe ball center C3 two presentation surface parts that excite the eyelid portion on both sides of the eyelid center C2 in the width direction CD are provided. It may be done.
- the shape of the mounting surface which is in the form of a long flat plate, may be changed as appropriate.
- the mounting surface may be convexly curved, and specifically, may be a partially cylindrical surface having a slight curvature in the longitudinal direction LD.
- the external shape of the mounting surface may be square, elliptical, trapezoidal or the like.
- the footrest device of the embodiment is attached to the mounting portion in a posture inclined only in the longitudinal direction of the vehicle.
- the width direction CD of the mounting surface 73 is in the horizontal direction of the vehicle.
- the mounting posture of the footrest device may be changed as appropriate.
- the mounting surface 73 may be directed outward (center tunnel side) by mounting in which the width direction CD is slightly inclined with respect to the horizontal direction of the vehicle. If it is such an attachment posture, the protrusion amount of the presentation surface part 83a (refer FIG. 4) provided in the outer range of a mounting surface and the presentation surface 81a (refer FIG. 4) provided in the inner range of a mounting surface is substantially identical. It may be taken.
- the details of the footrest device provided at a position adjacent to the center tunnel in the vehicle with the right handle have been described, but this footrest device may be set behind the hall house in the vehicle with the left handle . That is, the footrest device having substantially the same configuration is applicable to both right-handed and left-handed vehicles.
- the presentation surface portion that excites the sole is provided on the mounting surface of the footrest device.
- the configuration for providing the presentation surface is not limited to the footrest device.
- a tread surface such as the accelerator pedal 12 (see FIG. 1), the brake pedal 13 (see FIG. 1), or the clutch pedal may be a "mounting surface", and a presentation surface may be provided on the tread surfaces of these pedals.
- a presentation surface portion may be provided on the floor surface 14 with the floor surface 14 (see FIG. 1) in front of the driver's seat 11 as a mounting surface.
- the accelerator pedal 12 may be locked at a specific position so as not to stroke due to the application of the stepping force by the driver during autonomous traveling.
- the presentation surface controlled by the HCU is not limited to the configuration that excites the driver's sole.
- the presentation surface may be provided at any position in the vehicle compartment as long as it can contact the user of the vehicle.
- the HCU notifies the driver of the future behavior of the vehicle by individually controlling the vibration of a plurality of presentation surfaces provided on the seat surface of the driver's seat 11 (see FIG. 1), the backrest, and the armrest. You may
- the vibration speaker is used as a vibration presentation device.
- the waveform of the drive signal input to such a vibration speaker may be changed as appropriate.
- the excitation presenter is not limited to the vibration speaker.
- a vibration motor or the like that generates a vibration by rotation of a mass body whose center of gravity is offset from the rotation center may be used as a vibration presentation device.
- a part of the plurality of presentation surfaces may be formed by the vibration speaker, and another part may be formed by the vibration motor.
- the rise time and fall time of the excitation in the vibration speaker can be shorter than that of the vibration motor.
- the control of vibration frequency and amplitude is also easier for vibration speakers than vibration motors.
- the vibration speaker generates vibration in a direction perpendicular to the mounting surface. Therefore, the vibration speaker can locally excite a part of the foot sole, and the driver can easily identify the location of the vibration.
- the vibration speaker has a suitable configuration as a vibration presentation device.
- the determination result of the degree of request for operation participation by the mode transition control unit 52 (see FIG. 2) of the second modification of the first embodiment is not a discrete value such as “high” and “low” but a continuous value Is output as Then, the signal output unit 53 (see FIG. 2) continuously changes the off time based on the value of the degree of request for driving participation. More specifically, the signal output unit 53 gradually reduces the vibration interval as the degree of request for participation in driving increases, and gradually increases the interval for vibration as the degree of request for participation in driving decreases. As described above, the increase and decrease of the interval in the request degree presentation mode may not be performed discretely.
- the continuous value is determined by, for example, a function using the reception sensitivity of the positioning signal, the detection state of the external sensor, and the like as variables.
- the vibration speaker 82 (see FIGS. 10A and 10B) disposed in the heel portion excites the driver's sole.
- the vibration speaker that reproduces the heartbeat in the requested degree presentation mode may not be only the vibration speaker 82 disposed in the heel portion.
- Other vibration speakers 81 and 83 may perform a vibration that reproduces a pseudo heartbeat.
- artificial biofeedback may be implemented by synchronous control of a plurality of vibration speakers.
- the degree of request for driving participation in the embodiment increases due to deterioration of the reception sensitivity of the positioning signal, the detection state of the external sensor, and the like. Such an increase in the degree of request for driving participation occurs, for example, along with deterioration of weather conditions such as rainfall, snowfall and thick fog, building shadows in urban areas, entry into tunnels, underground and inside facilities and the like. Furthermore, even in a scene where lane markings are divided, a scene entering a sharp curve, or the like, the degree of demand for driving participation may increase.
- the three vibration speakers 81 to 83 are synchronously controlled. However, if strong incongruity can be given to the driver, for example, control may be performed to randomly generate vibrations of the three vibration speakers 81 to 83. Furthermore, the duty ratio, which is about 15% in the first embodiment, may be changed as appropriate. For example, the duty ratio occupied by the on time Ton in the drive signal may be set to about 50%. Furthermore, the duty ratio of the on time Ton may be gradually increased with the passage of time.
- the signal output unit 53 (see FIG. 2) of the third and fourth modifications of the first embodiment alternately vibrates in the preceding presentation mode to distinguish between the longitudinal direction and the lateral direction of the acceleration.
- the strength (amplitude) of the vibration of ⁇ 83a is set to a different value. Specifically, in the acceleration operation presentation of the third modification, the vibration intensity of the presentation surface portions 81a and 83a is stronger than the vibration intensity of the presentation surface portion 82a, and in the deceleration operation presentation, the vibration intensity of the presentation surface portions 82a is, The strength of the vibration of the presentation surface portions 81a and 83a is made stronger.
- the vibration intensity of the presentation surface 81a is stronger than the vibration intensity of the presentation surface 83a, and in the left rotation speed operation presentation, the vibration intensity of the presentation surface 83a is , And the strength of the vibration of the presentation surface 81a.
- the vibration intensity of the presentation surface 82a is stronger than the vibration intensity of the presentation surfaces 81a and 83a, and in the deceleration operation presentation, the vibration intensity of the presentation surfaces 81a and 83a is , And the strength of the vibration of the presentation surface 82a.
- the vibration intensity of the presenting surface 83a is stronger than the vibration intensity of the presenting surface 81a, and in the left turning speed operation presentation, the vibration intensity of the presenting surface 81a is , And the strength of the vibration of the presentation surface 83a.
- the prediction of the content of the presentation behavior change in the first embodiment was completed before the behavior change occurred in the vehicle.
- the anteroposterior relationship between the completion timing of each action presentation and the generation start timing of the acceleration accompanying the behavior change may be appropriately adjusted.
- the behavior change of the vehicle may be initiated during the continuation of the motion presentation.
- the completion timing of the motion presentation is later than the generation start timing of the acceleration accompanying the behavior change.
- the completion timing of the operation presentation may be set so as to be substantially simultaneous with the generation start timing of the acceleration accompanying the behavior change.
- Each motion presentation described in the first embodiment is a motion presentation when one of acceleration, deceleration, and turning is performed as the next behavior of the vehicle.
- complex behavior is scheduled as the next behavior of the vehicle, such as right turn while decelerating.
- combined action presentation as shown in FIGS. 24A and 24B is performed.
- the signal output unit first alternately vibrates the front speaker group 80f and the vibration speaker 81 (for example, twice each) as shown in the deceleration operation presentation (see FIGS. 10A and 10B). After that, the signal output unit alternately vibrates the vibration speaker 81 and the vibration speaker 83 (for example, two times each) as shown in the right-turning motion presentation (see FIGS. 17A and 17B).
- the deceleration motion presentation and the right turning motion presentation may be repeated multiple times.
- the acceleration threshold value, the deceleration threshold value, and the left and right turning threshold values used in the embodiment can be set to different values.
- the user of the vehicle is more anxious about the acceleration in the forward (acceleration) direction and the lateral direction than the acceleration in the backward (deceleration) direction. Therefore, the acceleration threshold and the turning threshold may be set to lower values than the deceleration threshold.
- each threshold may be set to a low value as a whole.
- each threshold may be set to a high value as a whole.
- Each of these thresholds may be adjustable by the user of the vehicle.
- the HCU, the drive device and the footrest device are provided as separate configurations.
- the configuration of the drive may be provided integrally with the HCU or the footrest device.
- the arithmetic processing of the HCU for controlling the footrest device may be performed by another control device different from the HCU, or may be performed by a control circuit provided in the footrest device 100.
- non-transitory tangible storage media can be employed as a storage unit for storing an information presentation control program executed by the processing unit.
- Such non-transitory tangible storage media may be various non-volatile storage media such as flash memory, hard disk and optical disk, or may be volatile storage media such as RAM.
- the storage medium is not limited to the storage unit provided in the control device such as the HCU, and may be an optical disk serving as a copy source to the storage unit, a hard disk drive of a general-purpose computer, or the like.
- each step is expressed as, for example, S101. Furthermore, each step may be divided into multiple sub-steps, while multiple steps may be combined into one step.
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Automation & Control Theory (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Physics & Mathematics (AREA)
- Human Computer Interaction (AREA)
- General Physics & Mathematics (AREA)
- Mathematical Physics (AREA)
- Traffic Control Systems (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
Abstract
This information providing control device provides information to a user through a control for causing vibration in a plurality of providing surface parts (81a-83a) that are provided so as to come into contact with a user who boards an automatically operable vehicle. The information providing control device comprises: an information acquisition unit (51) that acquires behavior information indicating future behavior of an autonomously traveling vehicle; a behavior determination unit (52) that, on the basis of the behavior information, determines whether or not a change in the behavior provided to the user will occur in the vehicle; and a providing control unit (53) that individually controls the vibrations of the plurality of providing surface parts and notifies a driver in advance of the specifics of the provided change in behavior before the occurrence of the provided change in behavior that the behavior determination unit has determined should be provided.
Description
本出願は、2017年8月3日に出願された日本国特許出願2017-150912号に基づくものであり、ここにその記載内容を参照により援用する。
This application is based on Japanese Patent Application No. 2017-150912 filed on Aug. 3, 2017, the contents of which are incorporated herein by reference.
本開示は、車両のユーザに情報を提示する情報提示制御の技術に関する。
The present disclosure relates to a technology of information presentation control for presenting information to a user of a vehicle.
体性感覚を通じてユーザに情報提示する構成として、例えば特許文献1には、足置き場を移動させるフットレスト、及び背もたれを移動させるシート等が開示されている。フットレスト及びシートは、足置き場及び背もたれ等の移動により、自律走行する車両の将来の挙動変化の内容を、挙動変化の発生以前にユーザに通知できる。一例として、特許文献1では、減速の予告として足置き場が後傾された後に、実際の車両の減速が開始される。
As a configuration for presenting information to the user through somatic sensation, for example, Patent Document 1 discloses a footrest for moving a footrest, a sheet for moving a backrest, and the like. The footrest and the seat can notify the user of the contents of the future behavior change of the autonomously traveling vehicle before the occurrence of the behavior change by the movement of the footrest and the backrest. As an example, in Patent Document 1, the actual vehicle deceleration starts after the footrest is tilted backward as a notice of deceleration.
フットレストの足置き場及びシートの背もたれ等を動かすための機構は、大型化し易い。そのため、車両への搭載性を確保が困難となり得た。
The mechanism for moving the footrest of the footrest, the backrest of the seat, etc. is easily enlarged. Therefore, it could be difficult to secure the mountability to a vehicle.
本開示は、情報提示のための構成の車両への搭載性を確保したうえで、体性感覚を通じたユーザへの通知が可能な情報提示制御装置の提供を目的とする。
An object of the present disclosure is to provide an information presentation control device capable of notifying a user through somatic feeling while ensuring mountability of a configuration for information presentation on a vehicle.
本開示の一態様による情報提示制御装置は、自動運転可能な車両に搭乗するユーザと接触するよう設けられた複数の提示面部を振動させる制御により、ユーザに情報を提示する情報提示制御装置であって、自律走行する車両の将来挙動を示した挙動情報を取得する情報取得部と、挙動情報に基づき、ユーザに提示する挙動変化が車両に生じるか否かを判定する挙動判定部と、挙動判定部にて提示すべきと判定された提示挙動変化の発生以前に、複数の提示面部の振動を個別に制御し、提示挙動変化の内容を運転者に予め通知する提示制御部と、を備える。
An information presentation control device according to an aspect of the present disclosure is an information presentation control device that presents information to a user by control of vibrating a plurality of presentation surface portions provided to be in contact with a user boarding a vehicle capable of automatic driving. And an information acquisition unit that acquires behavior information indicating a future behavior of the vehicle traveling autonomously, a behavior determination unit that determines whether or not a behavior change to be presented to the user occurs in the vehicle based on the behavior information, and a behavior determination And a presentation control unit configured to individually control the vibrations of the plurality of presentation surfaces and to notify the driver in advance of the contents of the presentation behavior change before occurrence of the presentation behavior change determined to be presented by the unit.
本開示の一態様による情報提示制御プログラムは、自動運転可能な車両に搭乗するユーザと接触するよう設けられた複数の提示面部を振動させる制御により、ユーザに情報を提示する情報提示制御プログラムであって、少なくとも一つの処理部を、自律走行する車両の将来挙動を示した挙動情報を取得する情報取得部と、挙動情報に基づき、ユーザに提示する挙動変化が車両に生じるか否かを判定する挙動判定部と、挙動判定部にて提示すべきと判定された提示挙動変化の発生以前に、複数の提示面部の振動を個別に制御し、提示挙動変化の内容を運転者に予め通知する提示制御部として機能する。
An information presentation control program according to an aspect of the present disclosure is an information presentation control program for presenting information to a user by control of vibrating a plurality of presentation surface portions provided to be in contact with a user boarding a vehicle capable of automatic driving. To determine whether a change in behavior to be presented to the user occurs in the vehicle, based on the information acquisition unit that acquires behavior information indicating the future behavior of the autonomously traveling vehicle and at least one processing unit. The behavior judgment unit and the vibration of a plurality of presentation surface units are individually controlled before occurrence of the presentation behavior change determined to be presented by the behavior judgment unit, and the driver is notified beforehand of the contents of the presentation behavior change It functions as a control unit.
本開示の一態様による情報提示制御方法は自動運転可能な車両に搭乗するユーザと接触するよう設けられた複数の提示面部)を振動させる制御により、ユーザに情報を提示する情報提示制御方法であって、自律走行する車両の将来挙動を示した挙動情報を取得することと、挙動情報に基づき、ユーザに提示する挙動変化が車両に生じるか否かを判定することと、挙動判定部にて提示すべきと判定された提示挙動変化の発生以前に、複数の提示面部の振動を個別に制御し、提示挙動変化の内容を運転者に予め通知することと、を備える。
An information presentation control method according to an aspect of the present disclosure is an information presentation control method for presenting information to a user by control of vibrating a plurality of presentation surface portions provided to be in contact with a user boarding a vehicle capable of automatic driving). Acquiring the behavior information indicating the future behavior of the autonomously traveling vehicle, determining whether or not the behavior change to be presented to the user is generated in the vehicle based on the behavior information, and presenting the behavior determination unit Controlling the vibration of the plurality of presentation surfaces individually before the occurrence of the presentation behavior change determined to be to be performed, and notifying the driver of the content of the presentation behavior change in advance.
本開示によれば、複数の提示面部の振動を個別に制御すれば、自律走行する車両に将来的に生じる挙動変化の内容が、ユーザに通知可能となる。このように振動によって将来挙動を通知可能であれば、フットレスト及びシート等を動かすための機構は、省略され得る。したがって、情報提示のための構成の車両への搭載性を確保したうえで、体性感覚を通じたユーザへの挙動変化の通知が可能になる。
According to the present disclosure, if the vibrations of the plurality of presentation surfaces are individually controlled, it is possible to notify the user of the contents of the behavior change that will occur in the vehicle traveling autonomously in the future. The mechanism for moving the footrest, the seat, etc. can be omitted if the behavior can be notified by vibration in the future. Therefore, while ensuring the mountability of the configuration for information presentation to the vehicle, it becomes possible to notify the user of the behavior change through the somatic feeling.
本開示についての上記および他の目的、特徴や利点は、添付図面を参照した下記詳細な説明から、より明確になる。添付図面において、
図1は、車両での運転席周辺のレイアウトを示す図であって、車載された状態のフットレスト装置を示す図であり、
図2は、フットレスト装置を含む振動提示システムを、車両システム等と共に示すブロック図であり、
図3は、フットレスト装置の構造を示す斜視図であり、
図4は、フットレスト装置の平面図であって、載置面における提示面部の配置を示す図であり、
図5は、図4のV-V線断面図であり、
図6は、各提示面部の配置を規定するうえで必要な足裏のポイントとそれらの距離の関係を示す図であり、
図7は、振動スピーカの構造と作動の原理を示す図であり、
図8は、フットレスト装置の動作モードの遷移の全体像を示す状態遷移図であり、
図9は、運転参加要請度に応じて要請度提示モードにおける振動のインターバルを切り替える要請度提示処理の詳細を示すフローチャートであり、
図10Aは、要請度提示モードにおける運転参加要請度が「低」である場合の振動スピーカの制御を示す図であり、
図10Bは、要請度提示モードにおける運転参加要請度が「低」である場合の振動スピーカの制御を示すタイムチャートの図であり、
図11Aは、要請度提示モードにおける運転参加要請度が「高」である場合の振動スピーカの制御を示す図であり、
図11Bは、要請度提示モードにおける運転参加要請度が「高」である場合の振動スピーカの制御を示すタイムチャートの図であり、
図12Aは、運転動作誘発モードでの各振動スピーカの制御の詳細を示す図であり、
図12Bは、運転動作誘発モードでの各振動スピーカの制御の詳細を示すタイムチャートの図であり、
図13は、要請度提示モード及び先行提示モード間での動作モードの切り替えを制御する遷移制御処理の詳細を示すフローチャートであり、
図14は、先行提示モードにおける各振動スピーカの制御を、走行計画にて予定された挙動変化の内容に応じて切り替える先行提示処理の詳細を示すフローチャートであり、
図15Aは、加速動作提示での各振動スピーカの制御を示す図であり、
図15Bは、加速動作提示での各振動スピーカの制御を示すタイムチャートの図であり、
図16Aは、減速動作提示での各振動スピーカの制御を示す図であり、
図16Bは、減速動作提示での各振動スピーカの制御を示すタイムチャートの図であり、
図17Aは、右旋回動作提示での各振動スピーカの制御を示す図であり、
図17Bは、右旋回動作提示での各振動スピーカの制御を示すタイムチャートの図であり、
図18Aは、左旋回動作提示での各振動スピーカの制御を示す図であり、
図18Bは、左旋回動作提示での各振動スピーカの制御を示すタイムチャートの図であり、
図19Aは、第二実施形態による要請度提示モードでの振動スピーカの制御を示す図であり、
図19Bは、第二実施形態による要請度提示モードでの振動スピーカの制御を示すタイムチャートの図であり、
図20Aは、第二実施形態による右旋回動作提示での各振動スピーカの制御を示す図であり、
図20Bは、第二実施形態による右旋回動作提示での各振動スピーカの制御を示すタイムチャートの図であり、
図21Aは、第二実施形態による左旋回動作提示での各振動スピーカの制御を示す図であり、
図21Bは、第二実施形態による左旋回動作提示での各振動スピーカの制御を示すタイムチャートの図であり、
図22Aは、第三実施形態による右旋回動作提示での各振動スピーカの制御を示す図であり、
図22Bは、第三実施形態による右旋回動作提示での各振動スピーカの制御を示すタイムチャートの図であり、
図23Aは、第三実施形態による左旋回動作提示での各振動スピーカの制御を示す図であり、
図23Bは、第三実施形態による左旋回動作提示での各振動スピーカの制御を示すタイムチャートの図であり、
図24Aは、複合動作提示での各振動スピーカの制御を示す図であり、
図24Bは、複合動作提示での各振動スピーカの制御を示すタイムチャートの図である。
The above and other objects, features and advantages of the present disclosure will become more apparent from the following detailed description with reference to the accompanying drawings. In the attached drawings,
FIG. 1 is a view showing a layout around a driver's seat of a vehicle, showing a footrest device mounted on a vehicle, FIG. 2 is a block diagram showing a vibration presentation system including a footrest device together with a vehicle system etc. FIG. 3 is a perspective view showing the structure of the footrest device, FIG. 4 is a plan view of the footrest device, showing the arrangement of the presentation surface portion on the mounting surface, 5 is a cross-sectional view taken along the line V-V of FIG. FIG. 6 is a diagram showing the relationship between the points of the soles and their distances necessary to define the arrangement of the presentation surfaces, FIG. 7 is a diagram showing the structure and operation principle of the vibration speaker; FIG. 8 is a state transition diagram showing an overview of transition of the operation mode of the footrest device; FIG. 9 is a flowchart showing the details of a request degree presentation process of switching the vibration interval in the request degree presentation mode according to the driving participation request degree, FIG. 10A is a diagram showing control of the vibration speaker when the driving participation request degree is “low” in the request degree presentation mode, FIG. 10B is a time chart showing control of the vibration speaker when the degree of driving participation request is “low” in the request degree presentation mode, FIG. 11A is a diagram showing control of the vibration speaker when the driving participation request degree is “high” in the request degree presentation mode, FIG. 11B is a diagram of a time chart showing control of the vibration speaker when the degree of driving participation request in the request degree presentation mode is “high”; FIG. 12A is a diagram showing details of control of each vibration speaker in the driving action induction mode, FIG. 12B is a diagram of a time chart showing details of control of each vibration speaker in the driving action induction mode, FIG. 13 is a flowchart showing details of transition control processing for controlling switching of the operation mode between the request degree presentation mode and the prior presentation mode, FIG. 14 is a flowchart showing the details of the prior presentation process of switching the control of each vibration speaker in the prior presentation mode according to the content of the behavior change scheduled in the travel plan, FIG. 15A is a diagram showing control of each vibration speaker in the acceleration operation presentation, FIG. 15B is a diagram of a time chart showing control of each vibration speaker in the acceleration operation presentation, FIG. 16A is a diagram showing control of each vibration speaker in the deceleration operation presentation, FIG. 16B is a diagram of a time chart showing control of each vibration speaker in the deceleration operation presentation, FIG. 17A is a diagram showing control of each vibration speaker in the right turn presentation, FIG. 17B is a diagram of a time chart showing control of each vibration speaker in the right turn presentation, FIG. 18A is a diagram showing control of each vibration speaker in the left turning motion presentation, FIG. 18B is a diagram of a time chart showing control of each vibration speaker at the time of presentation of a left turn, FIG. 19A is a diagram showing control of the vibration speaker in the requested degree presentation mode according to the second embodiment, FIG. 19B is a diagram of a time chart showing control of the vibration speaker in the requested degree presentation mode according to the second embodiment, FIG. 20A is a diagram showing control of each vibration speaker in the right turning operation presentation according to the second embodiment, FIG. 20B is a diagram of a time chart showing control of each vibration speaker in the right turning operation presentation according to the second embodiment, FIG. 21A is a diagram showing control of each vibration speaker in the left turning operation presentation according to the second embodiment, FIG. 21B is a diagram of a time chart showing control of each vibration speaker at the time of presenting the left turning motion according to the second embodiment, FIG. 22A is a diagram showing control of each vibration speaker at the time of presenting the right turn operation according to the third embodiment, FIG. 22B is a diagram of a time chart showing control of each vibration speaker at the time of presenting the right turn operation according to the third embodiment, FIG. 23A is a diagram showing control of each vibration speaker in the left turning operation presentation according to the third embodiment, FIG. 23B is a diagram of a time chart showing control of each vibration speaker in the left turning operation presentation according to the third embodiment, FIG. 24A is a diagram showing control of each vibration speaker in composite action presentation, FIG. 24B is a diagram of time charts showing control of the respective vibration speakers in composite action presentation.
以下に、図面を参照しながら本開示を実施するための複数の実施形態を説明する。
Hereinafter, a plurality of embodiments for carrying out the present disclosure will be described with reference to the drawings.
(第一実施形態)
図1及び図2に示す本開示の第一実施形態において、情報提示制御装置の機能は、HCU(Human Machine Interface Control Unit)40によって実現されている。HCU40は、フットレスト装置100及び駆動装置60等と共に振動提示システムを構成している。振動提示システムは、自動運転可能な車両に搭載され、車両の運転席11に着座したユーザ(以下、運転者)への情報提示を振動によって実施する。 First Embodiment
In the first embodiment of the present disclosure illustrated in FIG. 1 and FIG. 2, the function of the information presentation control device is realized by a human machine interface control unit (HCU) 40. The HCU 40 constitutes a vibration presentation system together with thefootrest device 100 and the drive device 60 and the like. The vibration presentation system is mounted on a vehicle capable of autonomous driving, and performs information presentation to a user (hereinafter referred to as a driver) seated on the driver's seat 11 of the vehicle by vibration.
図1及び図2に示す本開示の第一実施形態において、情報提示制御装置の機能は、HCU(Human Machine Interface Control Unit)40によって実現されている。HCU40は、フットレスト装置100及び駆動装置60等と共に振動提示システムを構成している。振動提示システムは、自動運転可能な車両に搭載され、車両の運転席11に着座したユーザ(以下、運転者)への情報提示を振動によって実施する。 First Embodiment
In the first embodiment of the present disclosure illustrated in FIG. 1 and FIG. 2, the function of the information presentation control device is realized by a human machine interface control unit (HCU) 40. The HCU 40 constitutes a vibration presentation system together with the
フットレスト装置100は、車両に搭載された複数のHMI(Human Machine Interface)機器のうちの一つである。フットレスト装置100は、車両に搭乗する運転者の足裏の載置を想定された載置面73に、複数の提示面部81a~83aを有している。フットレスト装置100は、提示面部81a~83aの振動により、運転者の足裏の感覚、具体的には振動覚を通じて、主に車両の自動運転に関連した情報を提示する。
The footrest device 100 is one of a plurality of HMI (Human Machine Interface) devices mounted on a vehicle. The footrest device 100 has a plurality of presentation surface portions 81a to 83a on a mounting surface 73 on which the placement of the soles of the driver riding the vehicle is assumed. The footrest device 100 presents information mainly related to the automatic driving of the vehicle through the sense of the sole of the driver, specifically the sense of vibration, by the vibration of the presentation surface portions 81a to 83a.
フットレスト装置100は、図1及び図3に示すように、全体として長手の厚板状に形成されている。フットレスト装置100は、運転者の左足が置かれる載置面73を運転席11側に向けた姿勢で、車両に設けられた取付部16に取り付けられている。載置面73の長手方向LDは、車両の前後方向及び上下方向に対し垂直な縦断面に沿っている。載置面73の幅方向(短手方向とも呼ぶ)CDは、車両の左右方向に沿っている。載置面73は、車両の後方から前方へ向かうに従って、上方に傾斜した姿勢とされている。フットレスト装置100は、図3~図5に示すように、フットレストベース70及び複数(三つ)の振動スピーカ81~83等によって構成されている。また、振動スピーカ81~83を各々第一~第三振動スピーカとも呼ぶ。
As shown in FIGS. 1 and 3, the footrest device 100 is formed in a longitudinal plate shape as a whole. The footrest device 100 is attached to the mounting portion 16 provided on the vehicle in a posture in which the mounting surface 73 on which the left foot of the driver is placed is directed to the driver's seat 11 side. The longitudinal direction LD of the mounting surface 73 is along a vertical cross section perpendicular to the front-rear direction and the vertical direction of the vehicle. The width direction (also referred to as the short side direction) CD of the mounting surface 73 is along the left-right direction of the vehicle. The mounting surface 73 is inclined upward as it goes from the rear to the front of the vehicle. As shown in FIGS. 3 to 5, the footrest device 100 is configured of a footrest base 70 and a plurality of (three) vibration speakers 81 to 83 and the like. The vibration speakers 81 to 83 are also referred to as first to third vibration speakers, respectively.
フットレストベース70は、ボルト等の締結部材によって車両の取付部16に固定されている。フットレストベース70は、上カバー部材71、下ベース板76、ベース緩衝材78及びスピーカ緩衝材79等によって構成されている。
The footrest base 70 is fixed to the mounting portion 16 of the vehicle by a fastening member such as a bolt. The footrest base 70 is configured of an upper cover member 71, a lower base plate 76, a base cushioning material 78, a speaker cushioning material 79, and the like.
上カバー部材71は、有底の浅い容器状である基材の底面に、薄い板状の化粧板72を貼り付けることによって形成されている。上カバー部材71は、全体として金属材料により形成されている。上カバー部材71は、支持壁部71a及び底壁部71bを有している。支持壁部71aは、底壁部71bの外縁に設けられており、底壁部71bに対して実質的に垂直に立設されている。支持壁部71aは、底壁部71bと下ベース板76との間の間隔を規定している。底壁部71bは、長手形状且つ平面状である載置面73を形成している。底壁部71bには、挿通開口74が設けられている。挿通開口74は、化粧板72を含む底壁部71bを板厚方向に貫通する真円状の開口である。挿通開口74は、互いに間隔を開けた配置にて、底壁部71bに三つ開口している。
The upper cover member 71 is formed by affixing a thin plate-like decorative plate 72 on the bottom surface of a base having a shallow container shape with a bottom. The upper cover member 71 is formed of a metal material as a whole. The upper cover member 71 has a support wall 71a and a bottom wall 71b. The support wall 71a is provided on the outer edge of the bottom wall 71b, and is erected substantially perpendicularly to the bottom wall 71b. The support wall 71 a defines the distance between the bottom wall 71 b and the lower base plate 76. The bottom wall 71 b forms a mounting surface 73 which is long and flat. The bottom wall 71 b is provided with an insertion opening 74. The insertion opening 74 is a perfect circular opening that penetrates the bottom wall portion 71 b including the decorative plate 72 in the thickness direction. Three insertion openings 74 are opened in the bottom wall portion 71b in a mutually spaced arrangement.
下ベース板76は、金属材料によって平板状に形成されている。下ベース板76の外形形状は、上カバー部材71の底壁部71bと実質的に同一である。下ベース板76は、上カバー部材71に対し載置面73の反対側に位置している。下ベース板76の外縁部には、支持壁部71aの頂部が当接している。下ベース板76は、三つの振動スピーカ81~83を個別に保持している。
The lower base plate 76 is formed in a flat plate shape by a metal material. The outer shape of the lower base plate 76 is substantially the same as the bottom wall 71 b of the upper cover member 71. The lower base plate 76 is located on the opposite side of the mounting surface 73 with respect to the upper cover member 71. The top of the support wall 71 a is in contact with the outer edge of the lower base plate 76. The lower base plate 76 holds the three vibration speakers 81 to 83 individually.
ベース緩衝材78は、例えばウレタン等によって下ベース板76よりも厚いシート状に形成されている。ベース緩衝材78は、下ベース板76と取付部16の間に、厚さ方向に押し縮められた状態で配置されている。ベース緩衝材78を介して、フットレストベース70は、取付部16に強固に固定されている。こうした取り付けにより、各振動スピーカ81~83の作動に起因した下ベース板76の振動は、下ベース板76とベース緩衝材78との境界で固定端反射すると見なされる。その結果、互いに逆位相となる入射波と反射波との実質的な相殺により、フットレストベース70の振動が低減される。
The base cushioning material 78 is formed of, for example, urethane or the like in a sheet shape thicker than the lower base plate 76. The base cushioning material 78 is disposed between the lower base plate 76 and the mounting portion 16 in a compressed state in the thickness direction. The footrest base 70 is firmly fixed to the mounting portion 16 via the base cushioning material 78. By such attachment, the vibration of the lower base plate 76 caused by the operation of each vibration speaker 81 to 83 is considered to be fixed end reflection at the boundary between the lower base plate 76 and the base cushioning material 78. As a result, the vibration of the footrest base 70 is reduced by the substantial cancellation of the incident wave and the reflected wave that are in antiphase with each other.
スピーカ緩衝材79は、柔軟性に優れた例えばスポンジ等によって円柱状に形成されている。スピーカ緩衝材79は、振動スピーカ81~83を下ベース板76に固定している部材(例えば、ネジ、ボルト及びピン等)に外嵌されている。スピーカ緩衝材79は、振動スピーカ81~83と下ベース板76との間で弾性体として機能し、各振動スピーカ81~83に生じる振動を自由端反射させる。その結果、互いに同位相となる入射波と反射波との合成波(定在波)の振幅が大きくなる。
The speaker cushioning material 79 is formed in a cylindrical shape by, for example, a sponge or the like which is excellent in flexibility. The speaker cushioning material 79 is externally fitted to a member (for example, a screw, a bolt, a pin, or the like) that fixes the vibration speakers 81 to 83 to the lower base plate 76. The speaker cushioning material 79 functions as an elastic body between the vibration speakers 81 to 83 and the lower base plate 76, and reflects the vibration generated in each of the vibration speakers 81 to 83 at its free end. As a result, the amplitude of the composite wave (the standing wave) of the incident wave and the reflected wave in the same phase is increased.
振動スピーカ81~83は、互いに間隔を開けた配置にて、下ベース板76に保持されている。振動スピーカ81~83は、スピーカ緩衝材79の介在により、下ベース板76から浮いた状態で固定されている。振動スピーカ81~83はそれぞれ、提示面部81a~83aを有している。
The vibration speakers 81 to 83 are held by the lower base plate 76 in a mutually spaced arrangement. The vibration speakers 81 to 83 are fixed in a floating state from the lower base plate 76 by the interposition of the speaker cushioning material 79. The vibration speakers 81 to 83 have presentation surface portions 81a to 83a, respectively.
提示面部81a~83aは、載置面73に実質的に垂直な方向に振動し、載置面73に載せられた運転者の足裏を加振する。提示面部81a~83aの振動は、運転者の履物の底面を突き上げる突き上げ振動であって、運転者の履物を通じて、運転者の足裏に伝搬可能である。個々の提示面部81a~83aの振動は、個別に制御される。
The presentation surface portions 81a to 83a vibrate in a direction substantially perpendicular to the mounting surface 73, and vibrate the sole of the driver placed on the mounting surface 73. The vibration of the presentation surface portions 81a to 83a is a push-up vibration that pushes up the bottom of the driver's footwear, and can be transmitted to the driver's sole through the driver's footwear. The vibrations of the individual presentation surfaces 81a to 83a are individually controlled.
提示面部81a~83aは、載置面73において互に異なる箇所に、各挿通開口74を通じて露出している。提示面部81a~83aは、載置面73の向く方向に、上カバー部材71よりも突出している。提示面部81a~83aは、長手方向LD及び幅方向CDのそれぞれについて、互いにずれた配置にて載置面73に露出している。具体的に、二つの提示面部81a,82aは、載置面73の長手方向LDに沿って並んでおり、二つの提示面部81a,83aは、載置面73の幅方向CDに沿って並んでいる。提示面部83aは、長手方向LDにて、提示面部81aと提示面部82aとの間に位置しており、提示面部82aは、幅方向CDにて、提示面部81aと提示面部83aとの間に位置している。
The presentation surface portions 81a to 83a are exposed through the respective insertion openings 74 at places different from each other on the placement surface 73. The presentation surface portions 81a to 83a project further than the upper cover member 71 in the direction in which the placement surface 73 faces. The presentation surface portions 81a to 83a are exposed to the placement surface 73 in a mutually offset arrangement with respect to each of the longitudinal direction LD and the width direction CD. Specifically, the two presentation surfaces 81a and 82a are arranged along the longitudinal direction LD of the mounting surface 73, and the two presentation surfaces 81a and 83a are arranged along the width direction CD of the mounting surface 73. There is. The presentation surface 83a is located between the presentation surface 81a and the presentation surface 82a in the longitudinal direction LD, and the presentation surface 82a is located between the presentation surface 81a and the presentation surface 83a in the width direction CD. doing.
提示面部81a~83aは、運転者が左足を載置面73に置いたときにそれぞれ踵中心C2、親指の付け根(以下、母指球中心C1)及び小指の付け根(以下、小指球中心C3)に自然に触れるような位置に配置されている。個別に記載すると、提示面部81aは、載置面73において運転者の母指球中心C1とその周囲(母指球部分)の載置が想定される範囲に設けられている。提示面部82aは、載置面73において踵中心C2とその周囲(踵部分)の載置が想定される範囲に設けられている。提示面部83aは、載置面73において小指球中心C3とその周囲(小指球部分)の載置が想定される範囲に設けられている。まず、図6に基づき、踵中心C2、母指球中心C1及び小指球中心C3の各位置について説明する。
When the driver places the left foot on the placement surface 73, the presentation surface portions 81a to 83a are respectively the heel center C2, the base of the thumb (hereinafter, the ball ball center C1) and the base of the little finger (hereinafter, the small finger ball center C3) It is placed in a position where you can touch naturally. When describing separately, the presentation surface part 81a is provided in the range where placement of the center C1 of the ball of the driver of the driver and the periphery (the ball part of the finger) on the placement surface 73 is assumed. The presentation surface portion 82 a is provided in a range where placement of the crucible center C 2 and the periphery (ridge portion) thereof is assumed on the placement surface 73. The presentation surface portion 83a is provided in a range in which placement of the little toe ball center C3 and the periphery (the little toe portion) on the placement surface 73 is assumed. First, with reference to FIG. 6, respective positions of the heel center C2, the thumb ball center C1, and the little finger center C3 will be described.
足裏には、足長FL、踵点HP、第二指先端FT、脛側中足点SFP及び腓側中足点CFPが規定できる。そして、踵点HPと第二指先端FTとを結ぶ仮想線が足軸Afである。また、踵点HPと脛側中足点SFPとの間の距離が内不踏長ILであり、踵点HPと腓側中足点CFPとの距離が外不踏長FILである。さらに、脛側中足点SFPと足軸Afとの距離が半足幅内HWiであり、腓側中足点CFPと足軸Afとの距離が半足幅外HWoである。
A foot length FL, a heel point HP, a second finger tip FT, a shin side middle foot point SFP and a heel side middle foot point CFP can be defined on the sole. Then, a virtual line connecting the heel point HP and the second finger tip FT is the foot axis Af. Further, the distance between the heel point HP and the shin mid-foot point SFP is the inner non-step length IL, and the distance between the heel point HP and the mid-side mid-foot point CFP is the outer non-step length FIL. Furthermore, the distance between the shin side midfoot point SFP and the foot axis Af is within the half foot width HWi, and the distance between the heel side midfoot point CFP and the foot axis Af is half foot outside HWo.
踵中心C2は、踵点HPから、爪先方向に「足長FL×0.18(L0参照)」となる足軸Af上の位置に規定される。母指球中心C1は、踵点HPから爪先方向に「内不踏長IL」の位置であって、足の内方向に「半足幅内HWi×0.5」の位置である。小指球中心C3は、踵点HPから爪先方向に「外不踏長FIL」の位置であって、足の外方向に「半足幅外×0.5」の位置である。
The heel center C2 is defined from the heel point HP at a position on the foot axis Af which is “foot length FL × 0.18 (refer to L0)” in the toe direction. The ball ball center C1 is a position "inward step length IL" in the toe direction from the heel point HP, and is a position "in in half foot width HWi x 0.5" in the inward direction of the foot. The small toe ball center C3 is a position "outside step length FIL" in the toe direction from the heel point HP, and is a position "half foot width outside x 0.5" in the outward direction of the foot.
そして、図4及び図6に示すように、フットレスト装置100では、載置面73に左足を自然に置いた状態として、足先を踵点HPに対して外側に僅かに傾けた状態が想定されている。一例として、載置面73の長手方向LDに対して足軸Afを外側に8°傾斜させた状態が想定されている。
Then, as shown in FIGS. 4 and 6, in the footrest device 100, with the left foot naturally placed on the placement surface 73, it is assumed that the foot tip is slightly inclined outward with respect to the heel point HP. ing. As an example, it is assumed that the foot axis Af is inclined outward by 8 ° with respect to the longitudinal direction LD of the mounting surface 73.
提示面部82aは、踵中心C2を加振するよう想定されており、載置面73の長手方向LDの両端のうちで、前端よりも後端に近接した位置に配置されている。そして、踵中心C2が提示面部82aの中心と重なった状態を基準として、提示面部81a,83aの位置が規定されている。
The presentation surface 82a is assumed to excite the crucible center C2, and is disposed at a position closer to the rear end than the front end, of both ends of the mounting surface 73 in the longitudinal direction LD. The positions of the presentation surface portions 81a and 83a are defined based on a state in which the eyebrow center C2 overlaps the center of the presentation surface portion 82a.
母指球中心C1を加振するよう想定された提示面部81aの中心は、提示面部82aの中心から爪先方向にL1の位置であって、足軸Afから足の内方向にL2の位置に配置されている。L1は、内不踏長ILからL0(図6参照)を差し引いた値であって、例えば136.8mm程度に規定される。L2は、上述したように半足幅内HWiの半分の値であって、例えば23.1mm程度に規定される。
The center of the presentation surface 81a assumed to excite the ball C1 is disposed at a position L1 from the center of the presentation surface 82a to the tip of the toe and at a position L2 in the inward direction of the foot from the foot axis Af It is done. L1 is a value obtained by subtracting L0 (see FIG. 6) from the inner step length IL, and is defined to, for example, about 136.8 mm. As described above, L2 is half the value of HWi within the half width, and is defined to be, for example, 23.1 mm.
小指球中心C3を加振するよう想定された提示面部83aの中心は、提示面部82aの中心から爪先方向にL3の位置であって、足軸Afから足の外方向にL4の位置に配置されている。L3は、外不踏長FILからL0(図6参照)を差し引いた値であって、例えば112.9mm程度に規定される。L4は、上述したように半足幅外HWoの半分の値であって、例えば26.9mm程度に規定される。尚、寸法L1~L4は、日本皮革産業連合会によって公開された足サイズ計測事業報告書のデータに基づく一例の値である。
The center of the presentation surface 83a assumed to excite the small toe ball center C3 is disposed at a position L3 from the center of the presentation surface 82a in the toe direction and at a position L4 from the foot axis Af outward of the foot ing. L3 is a value obtained by subtracting L0 (see FIG. 6) from the outer non-stepping length FIL, and is defined to, for example, about 112.9 mm. As described above, L4 is half the value of the half-foot-wide HWo, and is defined to be, for example, about 26.9 mm. The dimensions L1 to L4 are an example of values based on the data of the foot size measurement business report published by the Japan Leather Industry Association.
図5示すように、提示面部81a~83aの挿通開口74からの突き出し量は、互いに異なっている。車両の前後方向に沿う運転席11の中心線DCL(図1参照)から遠い振動スピーカ83における提示面部83aの突き出し量は、中心線DCLに近い振動スピーカ81における提示面部81aの突き出し量よりも大きくされている。換言すれば、足裏の外側部分の載置が想定される載置面73の外側範囲に設けられた提示面部83aの突き出し量は、足裏の内側部分の載置が想定される載置面73の内側範囲に設けられた提示面部81aの突き出し量よりも大きくされている。加えて、振動スピーカ82における提示面部82aの突き出し量は、他の振動スピーカ81,83における提示面部81a,83aの突き出し量よりも大きくされている。
As shown in FIG. 5, the protrusion amounts of the presentation surface portions 81a to 83a from the insertion opening 74 are different from each other. The protrusion amount of the presentation surface portion 83a in the vibration speaker 83 far from the center line DCL (see FIG. 1) of the driver's seat 11 along the longitudinal direction of the vehicle is larger than the protrusion amount of the presentation surface portion 81a in the vibration speaker 81 near the center line DCL It is done. In other words, the protrusion amount of the presentation surface portion 83a provided in the outer range of the mounting surface 73 where the placement of the outer part of the sole is assumed is the placement surface where the placement of the inner part of the sole is assumed It is larger than the protrusion amount of the presentation surface 81 a provided in the inner area 73. In addition, the protrusion amount of the presentation surface 82a in the vibration speaker 82 is larger than the protrusion amount of the presentation surface 81a, 83a in the other vibration speakers 81, 83.
振動スピーカ81~83は、図5及び図7に示すように、ハウジング84、ヨーク85、振動体87及びアタッチメント89等によって構成されている。ハウジング84は、例えば樹脂材料等によって容器状に形成されている。ハウジング84は、扁平な四角柱状を呈している。ハウジング84は、ヨーク85及び振動体87を収容している。
The vibration speakers 81 to 83 are configured by a housing 84, a yoke 85, a vibrating body 87, an attachment 89, and the like, as shown in FIGS. The housing 84 is formed in a container shape, for example, of a resin material or the like. The housing 84 has a flat square pole shape. The housing 84 accommodates the yoke 85 and the vibrator 87.
ヨーク85は、磁性金属材料により、有底の容器状に形成されている。ヨーク85には、底壁85a、外周壁85b及び中心壁85cが形成されている。外周壁85bの内周側には、磁石86が設けられている。磁石86は、外周壁85b、中心壁85c及び底壁85aを巡る磁界MFを形成している。
The yoke 85 is formed of a magnetic metal material in a bottomed container shape. The yoke 85 is formed with a bottom wall 85a, an outer peripheral wall 85b, and a central wall 85c. A magnet 86 is provided on the inner peripheral side of the outer peripheral wall 85 b. The magnet 86 forms a magnetic field MF which goes around the outer peripheral wall 85 b, the center wall 85 c and the bottom wall 85 a.
振動体87は、有底の円筒状に形成されている。振動体87の円筒壁87aの外周面には、コイル88が設けられている。コイル88は、ヨーク85及び磁石86によって形成される磁界MFの中に配置されている。コイル88には、駆動装置60の各アンプ62a~62cのいずれかによって駆動信号が印加される。コイル88への駆動信号の印加により、振動体87には軸方向の電磁力が作用する。振動体87は、ヨーク85に対して軸方向に相対変位し、アタッチメント89に応力を作用させる。
The vibrating body 87 is formed in a cylindrical shape with a bottom. A coil 88 is provided on the outer peripheral surface of the cylindrical wall 87 a of the vibrating body 87. The coil 88 is arranged in the magnetic field MF formed by the yoke 85 and the magnet 86. A drive signal is applied to the coil 88 by any one of the amplifiers 62a to 62c of the drive device 60. By applying the drive signal to the coil 88, an electromagnetic force in the axial direction acts on the vibrating body 87. The vibrating body 87 is axially displaced relative to the yoke 85 to exert a stress on the attachment 89.
アタッチメント89は、ゴム材料等の可撓性を有する材料によって形成されている。アタッチメント89は、ハウジング84に取り付けられており、ハウジング84の開口を塞いでいる。アタッチメント89は、凸状に湾曲した形状となる提示面部81a~83aを形成している。アタッチメント89の横断面における曲率は、外縁から径方向の中心に向かうに従って徐々に小さくなっている。こうした構成により、各提示面部81a~83aは、履物の底面(足裏)に中央部分を面接触させる。アタッチメント89の高さは、振動スピーカ81~83毎に異なっている。各アタッチメント89の高さが異なることにより、各提示面部81a~83aの挿通開口74からの突き出し量が調整されている。
The attachment 89 is formed of a flexible material such as a rubber material. The attachment 89 is attached to the housing 84 and blocks the opening of the housing 84. The attachment 89 forms presentation surface portions 81a to 83a which are convexly curved. The curvature of the cross section of the attachment 89 gradually decreases from the outer edge toward the radial center. With such a configuration, each of the presentation surface portions 81a to 83a brings the central portion into surface contact with the bottom surface (foot sole) of the footwear. The height of the attachment 89 is different for each of the vibration speakers 81 to 83. By making the heights of the attachments 89 different, the amount of protrusion of the presentation surface portions 81a to 83a from the insertion opening 74 is adjusted.
駆動装置60は、図2に示すように、HCU40から入力される制御信号に基づき、フットレスト装置100を作動させる。駆動装置60は、フットレスト装置100の各振動スピーカ81~83を駆動する構成として、複数(三つ)のデジタル‐アナログ変換器(以下、D/A変換器)61a~61cと、複数(三つ)のアンプ62a~62cとを有している。各振動スピーカ81~83の各提示面部81a~83aの振動を個別に制御可能なように、D/A変換器61a~61c及びアンプ62a~62cの数は、振動スピーカ81~83の数と一致している。
The drive device 60 operates the footrest device 100 based on a control signal input from the HCU 40, as shown in FIG. The driving device 60 is configured to drive the respective vibration speakers 81 to 83 of the footrest device 100, and includes a plurality of (three) digital-analog converters (hereinafter, D / A converters) 61a to 61c; And amplifiers 62a to 62c). The number of D / A converters 61a to 61c and amplifiers 62a to 62c is equal to the number of vibration speakers 81 to 83 so that the vibrations of the presentation surfaces 81a to 83a of the vibration speakers 81 to 83 can be individually controlled. I do.
D/A変換器61a~61cは、デジタル形式の電気信号をアナログ形式の電気信号に変換する電気回路である。D/A変換器61a~61cは、HCU40及びアンプ62a~62cと電気的に接続されている。D/A変換器61a~61cは、HCU40から入力される制御信号をアナログ信号に変換し、アンプ62a~62cへ向けて出力する。
The D / A converters 61a to 61c are electric circuits that convert digital type electric signals into analog type electric signals. The D / A converters 61a to 61c are electrically connected to the HCU 40 and the amplifiers 62a to 62c. The D / A converters 61a to 61c convert control signals input from the HCU 40 into analog signals, and output the converted signals to the amplifiers 62a to 62c.
アンプ62a~62cは、入力された信号に比例した電圧又は電流を出力する電気回路である。アンプ62a~62cはそれぞれ、D/A変換器61a~61c及び振動スピーカ81~83と電気的に接続されている。アンプ62a~62cは、D/A変換器61a~61cから入力されたアナログ信号を増幅することで、駆動信号を生成する。アンプ62a~62cは、生成した駆動信号を振動スピーカ81~83に印加することで、振動スピーカ81~83を駆動する。
The amplifiers 62a to 62c are electric circuits that output a voltage or current proportional to the input signal. The amplifiers 62a to 62c are electrically connected to the D / A converters 61a to 61c and the vibration speakers 81 to 83, respectively. The amplifiers 62a to 62c generate drive signals by amplifying analog signals input from the D / A converters 61a to 61c. The amplifiers 62a to 62c drive the vibration speakers 81 to 83 by applying the generated drive signals to the vibration speakers 81 to 83.
HCU40は、図1及び図2に示すように、車両に搭載された複数の電子制御ユニットのうちの一つである。HCU40は、駆動装置60と電気的に接続されており、駆動装置60と共にフットレスト装置100の作動を制御する。HCU40は、車載ネットワーク30と通信可能に接続されている。HCU40は、車載ネットワーク30を介して、車両システム20から情報を取得する。車両システム20には、車両の自律走行を可能にする電子制御ユニット、車両の状態を検出する種々の車載センサ、及び車両の外部と通信する通信機器等が含まれている。
The HCU 40 is one of a plurality of electronic control units mounted on a vehicle, as shown in FIGS. 1 and 2. The HCU 40 is electrically connected to the drive device 60 and controls the operation of the footrest device 100 together with the drive device 60. The HCU 40 is communicably connected to the in-vehicle network 30. The HCU 40 acquires information from the vehicle system 20 via the in-vehicle network 30. The vehicle system 20 includes an electronic control unit that enables autonomous traveling of the vehicle, various on-vehicle sensors that detect the state of the vehicle, and communication devices that communicate with the outside of the vehicle.
HCU40の制御回路は、処理部41、記憶部42及びRAM43等を有するコンピュータを主体に構成されている。処理部41は、CPU(Central Processing Unit)、GPU(Graphics Processing Unit)及びFPGA(Field-Programmable Gate Array)等の少なくとも一つを含む構成である。処理部41は、種々の演算処理を実行する。記憶部42は、不揮発性の記憶媒体を含む構成である。記憶部42には、情報提示制御プログラムを含む種々のプログラムが処理部41によって読み取り可能に格納されている。RAM(Random Access Memory)43は、揮発性の半導体メモリである。RAM43は、処理部41による演算処理の作業領域として機能する。
The control circuit of the HCU 40 mainly includes a computer having a processing unit 41, a storage unit 42, a RAM 43, and the like. The processing unit 41 is configured to include at least one of a central processing unit (CPU), a graphics processing unit (GPU), and a field-programmable gate array (FPGA). The processing unit 41 executes various arithmetic processing. The storage unit 42 is configured to include a non-volatile storage medium. The storage unit 42 stores various programs including an information presentation control program so that the processing unit 41 can read them. A random access memory (RAM) 43 is a volatile semiconductor memory. The RAM 43 functions as a work area of calculation processing by the processing unit 41.
HCU40は、記憶部42に格納された情報提示プログラムを処理部41によって実行することで、複数の機能ブロックを構築する。具体的に、HCU40には、フットレスト装置100を制御する機能ブロックとして、情報取得部51、モード遷移制御部52及び信号出力部53等が構築される。
The HCU 40 constructs a plurality of functional blocks by causing the processing unit 41 to execute the information presentation program stored in the storage unit 42. Specifically, in the HCU 40, an information acquisition unit 51, a mode transition control unit 52, a signal output unit 53, and the like are constructed as functional blocks that control the footrest device 100.
情報取得部51は、車両の周囲の地図データ、現在の車速データ及び操舵角データ等、車両に関連する種々の情報を車両システム20から取得する。加えて情報取得部51は、車両の自動運転に関連したシステム(以下、自動運転システム)の種々の情報を取得可能である。具体的に、自動運転機能の起動及び停止を示すステータス情報、並びに自動運転機能による自律走行を実現するための走行計画等が、情報取得部51によって取得される。さらに、自動運転システムの状態情報、例えば、GNSS(Global Navigation Satellite System)の測位衛星から送信された測位信号の受信感度を示す情報、並びにカメラ及びライダ等の外界センサの検出状態を示すステータス情報等が、情報取得部51によって取得される。
The information acquisition unit 51 acquires various information related to the vehicle, such as map data around the vehicle, current vehicle speed data, and steering angle data, from the vehicle system 20. In addition, the information acquisition unit 51 can acquire various information of a system related to the automatic driving of the vehicle (hereinafter, an automatic driving system). Specifically, the information acquisition unit 51 acquires status information indicating start and stop of the automatic driving function, and a travel plan for realizing autonomous traveling by the automatic driving function. Furthermore, status information of the automatic driving system, for example, information indicating the reception sensitivity of positioning signals transmitted from positioning satellites of the Global Navigation Satellite System (GNSS), status information indicating the detection status of external sensors such as cameras and lidar, etc. Is acquired by the information acquisition unit 51.
モード遷移制御部52は、情報取得部51にて取得された情報に基づき、フットレスト装置100の動作の切り替えを行う。具体的に、モード遷移制御部52は、自動運転のステータス情報に基づき、手動運転から自動運転への切り替え(自動運転ON)に伴い、フットレスト装置100を用いた情報提示を開始する。そして、自動運転から手動運転への切り替え(自動運転OFF)に伴い、フットレスト装置100を用いた情報提示を停止する。
The mode transition control unit 52 switches the operation of the footrest device 100 based on the information acquired by the information acquisition unit 51. Specifically, the mode transition control unit 52 starts information presentation using the footrest device 100 with switching from manual operation to automatic operation (automatic operation ON) based on status information of automatic operation. Then, with the switching from the automatic driving to the manual driving (automatic driving OFF), the information presentation using the footrest device 100 is stopped.
モード遷移制御部52は、フットレスト装置100の動作モードの切り替えを行う。詳記すると、モード遷移制御部52には、複数の動作モードとして、二つの要請度提示モード、運転行動誘発モード及び先行提示モードが予め設定されている(図8参照)。モード遷移制御部52は、情報取得部51にて取得される情報に基づき、フットレスト装置100の動作モードを遷移させる。尚、手動運転から自動運転に切り替えられた場合に、モード遷移制御部52は、まず要請度提示モードを選択する。
The mode transition control unit 52 switches the operation mode of the footrest device 100. Specifically, in the mode transition control unit 52, two request degree presentation modes, a driving behavior induction mode and a preceding presentation mode are set in advance as a plurality of operation modes (see FIG. 8). The mode transition control unit 52 causes the operation mode of the footrest device 100 to transition based on the information acquired by the information acquisition unit 51. When the manual operation is switched to the automatic operation, the mode transition control unit 52 first selects the request degree presentation mode.
要請度提示モードは、自動運転機能から運転者への運転参加の要請度の高低を提示する動作モードであって、自動運転システムの擬似的な鼓動を生成し、提示面部82aの振動によって再現された鼓動を運転者にバイオフィードバックする動作モードである。運転者への運転参加の要請度は、自動運転システムの状態情報に基づき、モード遷移制御部52によって判定される。
The demand degree presentation mode is an operation mode that presents the degree of demand for driving participation to the driver from the automatic driving function, and generates a simulated heartbeat of the automatic driving system, and is reproduced by the vibration of the presentation surface 82a. This is an operation mode in which the driver is biofeedbacked. The mode transition control unit 52 determines the degree of request for the driver's participation in driving based on the state information of the automatic driving system.
例えば、GNSSの感度情報及び外界センサのステータス情報に基づき、自動運転システムに余裕のある状態で自動運転が行われている場合には、モード遷移制御部52は、運転参加の要請度を「低」と判定する。一方、GNSSの感度情報及び外界センサのステータス情報に基づき、自動運転の難易度が上昇している場合には、モード遷移制御部52は、運転参加の要請度を「高」と判定する。モード遷移制御部52は、運転参加の要請度の高低に基づき、運転参加の要請度が「低」の要請度提示モードと、運転参加の要請度が「高」の要請度提示モードとを切り替える。
For example, when automatic driving is performed in a state where the automatic driving system has a margin based on the sensitivity information of the GNSS and the status information of the external sensor, the mode transition control unit 52 It is determined that On the other hand, when the difficulty level of the automatic driving is rising based on the sensitivity information of the GNSS and the status information of the external sensor, the mode transition control unit 52 determines that the driving participation degree is "high". The mode transition control unit 52 switches between a requested degree presentation mode in which the requested degree of driving participation is “low” and a requested degree presentation mode in which the requested degree of driving participation is “high” based on the degree of requested degree of driving participation. .
運転行動誘発モードは、自動運転中にて運転行動から離れている運転者に対し、運転行動の開始を促す動作モードである。モード遷移制御部52は、自動運転システムが特定状態となった場合に、要請度提示モードから運転行動誘発モードへと、動作モードを遷移させる。特定状態は、走行計画にて、自動運転機能から運転者への運転交代要求(Take-Over Request)が発生した状態である。一例として、自動運転の許可区間の終了地点が接近した場合に、運転交代要求が発生する。さらに、測位信号の受信感度又は外界センサの検出状態の悪化により、自動運転の継続が困難となった場合でも、運転交代要求が発生する。運転行動誘発モードは、予め規定された誘発動作の終了に伴い、運転行動誘発モードから要請度提示モードへと動作モードを遷移させる。
The driving behavior induction mode is an operation mode that urges a driver who is away from driving behavior during automatic driving to start driving behavior. The mode transition control unit 52 causes the operation mode to transition from the requested degree presentation mode to the driving action induction mode when the automatic driving system is in the specific state. The specific state is a state in which a drive change request (Take-Over Request) from the automatic driving function to the driver is generated in the travel plan. As one example, when the end point of the permitted section of the automatic driving approaches, a driving shift request is generated. Furthermore, even if it is difficult to continue the automatic driving due to the deterioration of the reception sensitivity of the positioning signal or the detection state of the external sensor, a driving shift request occurs. The driving behavior induction mode causes the operation mode to transition from the driving behavior induction mode to the request degree presentation mode with the end of the predefined induction operation.
先行提示モードは、自律走行する車両に挙動変化が発生する以前に、これから発生する挙動変化の内容を運転者に予め通知する動作モードである。モード遷移制御部52は、自律走行する車両の将来挙動を示した走行計画に基づき、運転者に提示すべき挙動変化(以下、提示挙動変化)が、例えば数秒後(1~3秒程度)に車両に生じるか否かを判定する。提示挙動変化の生じるシーン(以下、先行提示シーン)は、例えば運転者が不安を感じるような加減速、並びに左右への旋回及びレーンチェンジを行うシーンである。モード遷移制御部52は、先行提示シーンが走行計画にて予定されている場合に、要請度提示モードから先行提示モードへと動作モードを遷移させる。そして、先行提示モードにて、複数の提示面部81a~83aを用いた提示挙動変化の内容の予告が実施され、予告は、車両に挙動変化が発生する以前に終了される。提示挙動変化に対応した将来挙動の提示動作が終了すると、モード遷移制御部52は、先行提示モードから要請度提示モードへと動作モードを遷移させる。
The advance presentation mode is an operation mode in which the driver is notified in advance of the contents of the behavior change that will occur before the behavior change occurs in the autonomously traveling vehicle. The mode transition control unit 52 changes the behavior to be presented to the driver (hereinafter referred to as presentation behavior change), for example, after several seconds (about 1 to 3 seconds) based on the travel plan showing the future behavior of the autonomously traveling vehicle. It is determined whether or not it occurs in the vehicle. A scene where a presentation behavior change occurs (hereinafter, referred to as a prior presentation scene) is, for example, a scene in which the driver performs acceleration / deceleration such as anxiety, and turning to the left and right and lane change. The mode transition control unit 52 changes the operation mode from the request degree presentation mode to the advance presentation mode when the advance presentation scene is scheduled in the travel plan. Then, in the advance presentation mode, a notice of the contents of the presentation behavior change using the plurality of presentation surface parts 81a to 83a is carried out, and the notice is ended before the behavior change of the vehicle occurs. When the presentation operation of the future behavior corresponding to the presentation behavior change is finished, the mode transition control unit 52 causes the operation mode to transition from the preceding presentation mode to the request degree presentation mode.
信号出力部53は、フットレスト装置100の作動を制御するための制御信号を生成する。信号出力部53には、各動作モードに対応した制御信号が予め規定されている。信号出力部53は、モード遷移制御部52にて選択された動作モード及び情報取得部51にて取得されている情報に対応する制御信号を生成し、生成した制御信号を駆動装置60へ向けて出力する。
The signal output unit 53 generates a control signal for controlling the operation of the footrest device 100. Control signals corresponding to each operation mode are defined in advance in the signal output unit 53. The signal output unit 53 generates a control signal corresponding to the operation mode selected by the mode transition control unit 52 and the information acquired by the information acquisition unit 51, and directs the generated control signal to the drive device 60. Output.
ここまで説明したHCU40がフットレスト装置100を用いて実施する情報提示の詳細を、図9~図18Bに基づき、図2を参照しつつ、以下説明する。
Details of the information presentation implemented by the HCU 40 using the footrest device 100 described above will be described below based on FIGS. 9 to 18B and with reference to FIG.
図9に示す要請度提示処理は、自動運転の開始に伴う要請度提示モードへの動作モードの遷移により、信号出力部53によって開始される。要請度提示処理は、自動運転が停止されるまで、信号出力部53によって繰り返される。ただし、運転行動誘発モード又は先行提示モードへの遷移期間中にて、信号出力部53は、運転行動誘発モード又は先行提示モードにて規定された振動パターンでの各振動スピーカ81~83の作動を優先する。
The request degree presentation process shown in FIG. 9 is started by the signal output unit 53 by the transition of the operation mode to the request degree presentation mode accompanying the start of the automatic driving. The request degree presentation process is repeated by the signal output unit 53 until the automatic operation is stopped. However, during the transition period to the driving action induction mode or the advance presentation mode, the signal output unit 53 operates the respective vibration speakers 81 to 83 in the vibration pattern defined in the driving action induction mode or the advance presentation mode. Prioritize.
S101では、初期設定として、運転参加要請度が「低」である場合のインターバルTin1(図10A、図10B参照)の設定を記憶部42から取得し、S102に進む。インターバルTin1は、システムの設計時に予め設定された値であってもよく、車両のユーザによって設定された値であってもよい。
In S101, the setting of the interval Tin1 (see FIGS. 10A and 10B) in the case where the degree of driving participation request is “low” is acquired from the storage unit 42 as the initial setting, and the process proceeds to S102. The interval Tin1 may be a value preset at the time of design of the system, or may be a value set by the user of the vehicle.
S102では、情報取得部51にて取得される自動運転のステータス情報に基づき、自動運転がオン状態であるか否かを判定する。S102にて自動運転がオフ状態であると判定した場合、S108に進み、振動スピーカ81~83の作動を停止させる。一方、S102にて、自動運転のオン状態が継続されていると判定した場合、S103に進む。
In S102, based on the status information of the automatic driving acquired by the information acquiring unit 51, it is determined whether the automatic driving is in the on state. If it is determined in S102 that the automatic driving is in the OFF state, the process proceeds to S108, and the operation of the vibration speakers 81 to 83 is stopped. On the other hand, when it is determined in S102 that the automatic driving on state is continued, the process proceeds to S103.
S103では、取得した最新のインターバルの設定にて、振動スピーカ82の作動を開始し(図10A、図10B及び図11A、図11B参照)、S104に進む。S104では、モード遷移制御部52にて判定された最新の運転参加要請度を取得し、S105に進む。S105では、S104にて取得した運転参加要請度が「高」であるか否かを判定する。S104にて取得した運転参加要請度が「高」である場合、S105からS106に進む。一方、S104にて取得した運転参加要請度が「低」である場合、S105からS107に進む。
In S103, the operation of the vibration speaker 82 is started with the setting of the acquired latest interval (see FIG. 10A, FIG. 10B and FIG. 11A, FIG. 11B), and the process proceeds to S104. In S104, the latest driving participation request degree determined by the mode transition control unit 52 is acquired, and the process proceeds to S105. In S105, it is determined whether the driving participation request degree acquired in S104 is "high". When the driving participation request degree acquired in S104 is "high", the process proceeds from S105 to S106. On the other hand, when the driving participation request degree acquired in S104 is "low", the process proceeds from S105 to S107.
S106では、運転参加要請度が「高」である場合のインターバルTin2(図11A、図11B参照)の設定を記憶部42から取得し、S102に戻る。この場合のインターバルTin2も、運転参加要請度が「低」である場合と同様に、システムの設計時に予め設定された値であってもよく、車両のユーザによって設定された値であってもよい。一方、S107では、S101と同様に、運転参加要請度が「低」である場合のインターバルTin1(図10A、図10B参照)の設定を記憶部42から取得し、S102に進む。
In S106, the setting of the interval Tin2 (see FIGS. 11A and 11B) when the degree of driving participation request is “high” is acquired from the storage unit 42, and the process returns to S102. The interval Tin2 in this case may also be a value preset at the time of system design, or may be a value set by the user of the vehicle, as in the case where the degree of driving participation request is "low". . On the other hand, in S107, as in S101, the setting of the interval Tin1 (see FIGS. 10A and 10B) in the case where the degree of driving participation request is “low” is acquired from the storage unit 42, and the process proceeds to S102.
以上の要請度提示処理により、運転参加要請度が「低」である場合の要請度提示モードと、運転参加要請度が「高」である場合の要請度提示モードとが、リスクの発生及び消失に起因した自動運転システムの状態変化に応じて切り替えられる。これらの要請度提示モードにおける具体的な振動スピーカ82の制御の詳細を、図10A、図10B及び図11A、図11Bに基づき説明する。
According to the above request degree presentation processing, the request degree presentation mode when the driving participation request degree is "low" and the request degree presentation mode when the driving participation request degree is "high" are risk occurrence and disappearance It switches according to the state change of the automatic driving system resulting from. Details of control of the vibration speaker 82 in the request degree presentation mode will be described based on FIG. 10A, FIG. 10B and FIG. 11A and FIG. 11B.
各要請度提示モードでは、踵部分と接触するよう設けられた振動スピーカ82のみが作動し、足先側の二つの振動スピーカ81,83は、停止状態を維持する。信号出力部53は、振動スピーカ82の振動のオン及びオフを繰り返させる制御により、振動スピーカ82に脈動を生じさせ、自動運転システムの状態を運転者に提示する。脈動は、人間の鼓動を模倣した態様の振動である。振動スピーカ82の振動のオン時間Tonは、運転参加要請度の高低に係らず、実質同一とされる。オン時間Tonにて、駆動装置60から振動スピーカ82には、一つの矩形波が駆動信号として入力される。矩形波の入力による振動スピーカ82の突き上げ振動は、人間の心拍の鼓動に近い感覚を運転者に想起させ得る。
In each requested degree presentation mode, only the vibration speaker 82 provided to be in contact with the heel portion operates, and the two vibration speakers 81 and 83 on the toe side maintain the stopped state. The signal output unit 53 causes the vibration speaker 82 to generate pulsation by control of repeating on and off of the vibration of the vibration speaker 82, and presents the driver with the state of the automatic driving system. Pulsation is a vibration that mimics the human heartbeat. The on time Ton of the vibration of the vibration speaker 82 is substantially the same regardless of the driving participation request level. At the on time Ton, one rectangular wave is input as a drive signal from the drive device 60 to the vibration speaker 82. The push-up vibration of the vibration speaker 82 due to the input of the rectangular wave can remind the driver of a feeling close to the heartbeat of a human heart.
一方、振動のインターバルTin1,Tin2は、上述したように運転参加要請度の高低によって変更される。運転参加要請度が「高」である場合のインターバルTin2は、運転参加要請度が「低」である場合のインターバルTin1よりも短く規定される。即ち、運転参加要請度が「高」である場合の振動のオフ時間は、運転参加要請度が「低」である場合のオフ時間よりも短くされる。以上のように、信号出力部53は、システムの状態情報としての運転参加要請度の高低に基づき、要請度が高いほどオフ時間が短く規定されるようにインターバルTin1,Tin2を離散的に変化させ、提示面部82aを脈動させる周期を可変させる。「要請度が高いほど」とは、「要請度が高い状態である」ことを含む。
On the other hand, the vibration intervals Tin1 and Tin2 are changed according to the level of the driving participation request degree as described above. The interval Tin2 when the driving participation request degree is "high" is defined shorter than the interval Tin1 when the driving participation request degree is "low". That is, the off time of the vibration when the driving participation request degree is “high” is shorter than the off time when the driving participation request degree is “low”. As described above, the signal output unit 53 discretely changes the intervals Tin1 and Tin2 so that the off time is shorter as the request degree is higher based on the level of the operation participation request degree as the system state information. , The cycle of pulsing the presentation surface 82a is varied. The "higher degree of request" includes "the state of high request degree".
一例として、運転参加要請度が「低」である場合のインターバルTin1による振動は、人間の安静時における心拍数(例えば、毎分60回程度)を基準に設定され、具体的には1ヘルツ程度で繰り返される。一方、運転参加要請度が「高」である場合のインターバルTin2による振動は、人間の上昇時の心拍数(例えば、毎分160回程度)を基準に設定され、具体的には2.6ヘルツ程度で繰り返される。
As an example, the vibration at interval Tin1 when the degree of driving participation request is “low” is set based on the heart rate at a human resting time (for example, about 60 times per minute), specifically about 1 hertz Is repeated. On the other hand, the vibration due to the interval Tin 2 when the driving participation request level is “high” is set based on the heart rate at the time of rising of the human (for example, about 160 times per minute), specifically 2.6 hertz It is repeated by the degree.
次に、運転行動誘発モードにおける具体的な振動スピーカ81~83の制御の詳細を、図12A、図12Bに基づき説明する。上述したように、要請度提示モードから運転行動誘発モードへの遷移は、主に自動運転システムからの運転交代要求に基づき実施される。
Next, details of control of the specific vibration speakers 81 to 83 in the driving action induction mode will be described based on FIGS. 12A and 12B. As described above, the transition from the demand degree presentation mode to the driving behavior induction mode is mainly performed based on the driving shift request from the autonomous driving system.
運転行動誘発モードでは、振動させる提示面部81a~83aの数が要請度提示モードよりも増やされる。具体的に、運転行動誘発モードでは、三つの振動スピーカ81~83が同期制御され、三つの提示面部81a~83aにおける振動のオン及びオフのタイミングが同期する。信号出力部59は、全ての振動スピーカ81~83に、振動のオン及びオフを繰り返させる。駆動信号のうちでオン時間Tonの占める時間割合(オンデューティ比)は、例えば15%程度に設定される。運転行動誘発モードのオン時間Tonにて、各振動スピーカ81~83に入力される信号波は、立ち上がり時間よりも立ち下がり時間が短い連続した三角波である。
In the driving behavior induction mode, the number of presentation surface portions 81a to 83a to be vibrated is increased compared to the request degree presentation mode. Specifically, in the driving action induction mode, the three vibration speakers 81 to 83 are synchronously controlled, and the on and off timings of the vibrations in the three presentation surface portions 81a to 83a are synchronized. The signal output unit 59 causes all the vibration speakers 81 to 83 to repeat the on and off of the vibration. The time ratio (on-duty ratio) occupied by the on-time Ton in the drive signal is set to, for example, about 15%. The signal waves input to each of the vibration speakers 81 to 83 in the on time Ton of the driving action induction mode are continuous triangular waves whose falling time is shorter than the rising time.
次に、先行提示モードの詳細を説明する。図13に示す遷移制御処理は、要請度提示処理(図9参照)と同様に自動運転の開始に伴ってHCU40により開始され、要請度提示モード及び先行提示モード間での動作モードの遷移を行う。遷移制御処理は、自動運転が停止されるまで、HCU40によって繰り返される。
Next, details of the advance presentation mode will be described. The transition control process shown in FIG. 13 is started by the HCU 40 along with the start of the automatic operation in the same manner as the request degree presentation process (see FIG. 9), and performs transition of the operation mode between the request degree presentation mode and the preceding presentation mode. . The transition control process is repeated by the HCU 40 until the automatic operation is stopped.
S111では、自動運転機能にて策定された走行計画を取得し、S112に進む。S112では、S111にて取得した走行計画に基づき、先行提示の要否を判定する。走行計画にて、提示挙動変化が生じる先行提示シーンが数秒後に予定されている場合、S112からS113に進む。S113では、要請度提示モードから先行提示モードへの切り替えにより、フットレスト装置100による先行提示を開始させ、S111に戻る。一方、S112にて先行提示シーンが予定されていないと判定した場合、S112からS114に進む。S114では、先行提示モードから要請度提示モードへの切り替えることにより、先行提示を停止し、S111に戻る。
In S111, the travel plan formulated by the automatic driving function is acquired, and the process proceeds to S112. In S112, based on the travel plan acquired in S111, it is determined whether or not the prior presentation is necessary. In the travel plan, when the preceding presentation scene in which the presentation behavior change occurs is scheduled several seconds later, the process proceeds from S112 to S113. In S113, by switching from the request degree presentation mode to the advance presentation mode, the footrest device 100 starts an advance presentation, and the process returns to S111. On the other hand, when it is determined in S112 that the preceding presentation scene is not scheduled, the process proceeds from S112 to S114. In S114, the advance presentation is stopped by switching from the advance presentation mode to the request degree presentation mode, and the process returns to S111.
以上のS113による先行提示モードへの切り替えに基づき、図14に示す先行提示処理が開始される。先行提示処理では、次に予定されている先行提示シーンを判別し、次の車両挙動に対応したアクチュエーションを設定する。
Based on the above switching to the preceding presentation mode in S113, the preceding presentation process shown in FIG. 14 is started. In the advance presentation process, the advance presentation scene scheduled next is determined, and an actuation corresponding to the next vehicle behavior is set.
S121では、車両の前方向に加速閾値を超える加速度が発生予定か否かに基づき、加速動作の提示の要否を判定する。想定される先行提示シーンでの前方向への加速度が加速閾値以下であり、加速動作の提示が不要であると判定した場合、S121からS123に進む。一方で、車両の前方向への加速度が加速閾値を超えると判定した場合、S121からS122に進む。S122では、車両の加速動作を予告する先行提示動作(以下、加速動作提示,図15A、図15B参照)をフットレスト装置100に開始させ、先行提示処理を終了する。
In S121, based on whether or not an acceleration exceeding the acceleration threshold is to be generated in the forward direction of the vehicle, it is determined whether or not the presentation of the acceleration operation is necessary. When it is determined that the acceleration in the forward direction in the assumed preceding presentation scene is equal to or less than the acceleration threshold and the presentation of the acceleration operation is unnecessary, the process proceeds from S121 to S123. On the other hand, when it is determined that the acceleration in the forward direction of the vehicle exceeds the acceleration threshold, the process proceeds from S121 to S122. In S122, the footrest device 100 starts the advance presentation operation (hereinafter referred to as acceleration operation presentation, see FIGS. 15A and 15B) for giving a notice of the acceleration operation of the vehicle, and ends the advance presentation process.
S123では、車両の後方向に減速閾値を超える加速度が発生予定か否かに基づき、減速動作の提示の要否を判定する。想定される先行提示シーンでの後方向への加速度が減速閾値以下であり、減速動作の提示が不要であると判定した場合、S123からS125に進む。一方で、車両の後方向への加速度が減速閾値を超えると判定した場合、S123からS124に進む。S124では、車両の減速動作を予告する先行提示動作(以下、減速動作提示,図16A、図16B参照)をフットレスト装置100に開始させ、先行提示処理を終了する。
In S123, based on whether or not an acceleration exceeding the deceleration threshold is to be generated in the backward direction of the vehicle, it is determined whether or not the presentation of the deceleration operation is necessary. When it is determined that the backward acceleration in the assumed preceding presentation scene is equal to or less than the deceleration threshold and presentation of the deceleration operation is unnecessary, the process proceeds from S123 to S125. On the other hand, when it is determined that the backward acceleration of the vehicle exceeds the deceleration threshold, the process proceeds from S123 to S124. In S124, the footrest device 100 starts the advance presentation operation (hereinafter referred to as deceleration operation presentation, see FIGS. 16A and 16B) for giving a notice of the deceleration operation of the vehicle, and the advance presentation process is ended.
S125では、車両の右方向に旋回閾値を超える加速度が発生予定か否かに基づき、右方向への旋回動作の提示の要否を判定する。想定される先行提示シーンでの右方向の加速度が旋回閾値以下であり、右方向への旋回動作の提示が必要であると判定した場合、S125からS126に進む。S126では、車両の右旋回動作を予告する先行提示動作(以下、右旋回動作提示,図17A、図17B参照)をフットレスト装置100に開始させ、先行提示処理を終了する。
In S125, based on whether acceleration exceeding the turning threshold is to be generated in the right direction of the vehicle, it is determined whether it is necessary to present the turning operation in the right direction. If it is determined that the acceleration in the right direction in the assumed preceding presentation scene is equal to or less than the turning threshold and presentation of the turning operation in the right direction is required, the process proceeds from S125 to S126. In S126, the footrest device 100 causes the footrest device 100 to start an advance presentation operation (hereinafter, right rotation operation presentation, see FIGS. 17A and 17B) for giving a notice of right rotation operation of the vehicle, and ends the advance presentation process.
一方、S125にて、右方向のへ旋回動作の提示が不要であると判定した場合、S125からS127に進む。S127では、車両の左旋回動作を予告する先行提示動作(以下、左旋回動作提示,図18A、図18B参照)をフットレスト装置100に開始させ、先行提示処理を終了する。
On the other hand, when it is determined in S125 that the presentation of the turning operation to the right is not necessary, the process proceeds from S125 to S127. In S127, the footrest device 100 starts the advance presentation operation (hereinafter referred to as left rotation operation presentation, see FIG. 18A, FIG. 18B) for giving a notice of the left rotation operation of the vehicle, and ends the advance presentation process.
以上の先行提示モードにおける各振動スピーカ81~83の制御の詳細を、図15A~図18に基づき説明する。先行提示モードでは、三つの提示面部81a~83aのうちで、提示挙動変化によって車両に生じる加速度の方向に沿って並ぶ少なくとも二つが交互に振動するよう制御される。
Details of the control of the respective vibration speakers 81 to 83 in the preceding presentation mode will be described based on FIGS. 15A to 18. In the advance presentation mode, at least two of the three presentation surfaces 81a to 83a are controlled to vibrate alternately along the direction of the acceleration generated on the vehicle by the presentation behavior change.
図15A、図15Bに示す加速動作提示は、車両に前方向への加速度が生じると判定された場合に実施される。加速動作提示では、運転者の足先側であって、車両の前方向に配置された振動スピーカ81,83(以下、前方スピーカ群80f)が一体的に同期制御される。信号出力部59は、運転者の踵側であって、車両の後ろ方向に配置された振動スピーカ82と、上述の前方スピーカ群80fとを、予め規定された時間間隔で交互に振動させる。
The acceleration operation presentation shown in FIGS. 15A and 15B is performed when it is determined that the vehicle is accelerated in the forward direction. In the acceleration operation presentation, vibration speakers 81 and 83 (hereinafter referred to as front speaker group 80f) disposed on the front side of the driver and in the front direction of the vehicle are integrally and synchronously controlled. The signal output unit 59 alternately vibrates the vibration speaker 82 disposed on the rear side of the vehicle on the heel side of the driver and the above-described front speaker group 80f at predetermined time intervals.
詳記すると、振動スピーカ82の振動の停止後から、前方スピーカ群80fの振動開始までの時間間隔が、第一オフ時間T1fである。一方、前方スピーカ群80fの振動の停止後から、振動スピーカ82の振動開始までの時間間隔が、第二オフ時間T2fである。信号出力部59は、第一オフ時間T1fを第二オフ時間T2fよりも短く設定する。こうした各オフ時間T1f,T2fの設定により、一連の振動スピーカ81~83の振動は、前方向へ押し出されるイメージを運転者に想起させる。
Specifically, the time interval from the stop of the vibration of the vibration speaker 82 to the start of the vibration of the front speaker group 80f is the first off time T1f. On the other hand, the time interval from the stop of the vibration of the front speaker group 80f to the start of the vibration of the vibration speaker 82 is the second off time T2f. The signal output unit 59 sets the first off time T1f shorter than the second off time T2f. By setting each of the off times T1f and T2f, the vibration of the series of vibration speakers 81 to 83 reminds the driver of an image pushed forward.
図16A、図16Bに示す減速動作提示は、車両に後方向への加速度が生じると判定された場合に実施される。減速動作提示でも、前方スピーカ群80fは、一体的に同期制御される。信号出力部59は、前方スピーカ群80fと振動スピーカ82と、加速動作提示とは異なる時間間隔で交互に振動させる。
The deceleration operation presentation shown in FIGS. 16A and 16B is performed when it is determined that the vehicle is accelerated in the backward direction. Even in the deceleration operation presentation, the front speaker group 80f is integrally and synchronously controlled. The signal output unit 59 alternately vibrates the front speaker group 80 f and the vibration speaker 82 at time intervals different from the acceleration operation presentation.
詳記すると、減速動作提示では、前方スピーカ群80fの振動の停止後から、振動スピーカ82の振動開始までの時間間隔が、第一オフ時間T1bとされる。一方、振動スピーカ82の振動の停止後から、前方スピーカ群80fの振動開始までの時間間隔が、第二オフ時間T2bとされる。信号出力部59は、第一オフ時間T1bを第二オフ時間T2bよりも短く設定する。こうした各オフ時間T1b,T2bの設定により、一連の振動スピーカ81~83の振動は、後方向へ引き戻されるイメージを運転者に想起させる。
Specifically, in the deceleration operation presentation, the time interval from the stop of the vibration of the front speaker group 80f to the start of the vibration of the vibration speaker 82 is taken as a first off time T1b. On the other hand, the time interval from the stop of the vibration of the vibration speaker 82 to the start of the vibration of the front speaker group 80f is taken as a second off time T2b. The signal output unit 59 sets the first off time T1b shorter than the second off time T2b. By setting the respective off-times T1b and T2b, the vibration of the series of vibration speakers 81 to 83 reminds the driver of an image pulled back in the backward direction.
尚、加速動作提示及び減速動作提示では、前方スピーカ群80fの振動のオン時間と、振動スピーカ82の振動のオン時間は、実質同一である。加えて、前方スピーカ群80fの振動の強さ(振幅)と、振動スピーカ82の振動の強さ(振幅)も実質的に同一である。
In the acceleration operation presentation and the deceleration operation presentation, the on time of the vibration of the front speaker group 80f and the on time of the vibration of the vibration speaker 82 are substantially the same. In addition, the vibration intensity (amplitude) of the front speaker group 80f and the vibration intensity (amplitude) of the vibration speaker 82 are also substantially the same.
図17A、図17Bに示す右旋回動作提示は、車両に右方向への加速度が生じると判定された場合に実施される。右旋回動作提示では、幅方向CDに並ぶ二つの振動スピーカ81,82のみが作動し、踵側の振動スピーカ82は、停止状態を維持する。信号出力部59は、二つの振動スピーカ81,82を、予め規定された時間間隔で交互に振動させる。
The right turn operation presentation shown in FIGS. 17A and 17B is performed when it is determined that acceleration in the right direction is generated in the vehicle. In the right turn motion presentation, only the two vibration speakers 81, 82 aligned in the width direction CD operate, and the vibration speaker 82 on the heel side maintains the stop state. The signal output unit 59 alternately vibrates the two vibration speakers 81 and 82 at predetermined time intervals.
右旋回動作提示では、左側に位置する振動スピーカ83の振動の停止後から、右側に位置する振動スピーカ83の振動開始までの時間間隔が、第一オフ時間T1rとされる。一方、右側に位置する振動スピーカ81の振動の停止後から、左側に位置する振動スピーカ83の振動開始までの時間間隔が、第二オフ時間T2rとされる。信号出力部59は、第一オフ時間T1rを第二オフ時間T2rよりも短く設定する。こうした各オフ時間T1r,T2rの設定により、一連の振動スピーカ81,82の振動は、右方向へ移動するイメージを運転者に想起させる。
In the right turn operation presentation, the time interval from the stop of the vibration of the vibration speaker 83 located on the left to the start of the vibration of the vibration speaker 83 located on the right is taken as the first off time T1r. On the other hand, the time interval from the stop of the vibration of the vibration speaker 81 located on the right to the start of the vibration of the vibration speaker 83 located on the left is taken as a second off time T2r. The signal output unit 59 sets the first off time T1r to be shorter than the second off time T2r. By setting each of the off times T1r and T2r, the vibration of the series of vibration speakers 81 and 82 reminds the driver of an image moving to the right.
図18A、図18Bに示す左旋回動作提示は、車両に左方向への加速度が生じると判定された場合に実施される。左旋回動作提示でも、信号出力部53は、踵側の振動スピーカ82の停止状態を維持させる一方で、二つの振動スピーカ81,82を予め規定された時間間隔で交互に振動させる。
The left turn action presentation shown in FIGS. 18A and 18B is performed when it is determined that acceleration in the left direction occurs in the vehicle. The signal output unit 53 alternately vibrates the two vibration speakers 81 and 82 at a predetermined time interval while maintaining the stop state of the vibration speaker 82 on the heel side also in the left turning motion presentation.
左旋回動作提示では、二つのうちで右側に位置する振動スピーカ81の振動の停止後から、二つのうちで左側に位置する振動スピーカ83の振動開始までの時間間隔が、第一オフ時間T1lとされる。一方、左側に位置する振動スピーカ83の振動の停止後から、右側に位置する振動スピーカ81の振動開始までの時間間隔が、第二オフ時間T2lとされる。信号出力部59は、第一オフ時間T1lを第二オフ時間T2lよりも短く設定する。こうした各オフ時間T1l,T2lの設定により、一連の振動スピーカ81,82の振動は、左方向へ移動するイメージを運転者に想起させる。
In the left turning operation presentation, the time interval from the stop of the vibration of the vibration speaker 81 located on the right side of the two to the start of the vibration of the vibration speaker 83 located on the left side of the two is the first off time T1l. Be done. On the other hand, the time interval from the stop of the vibration of the vibration speaker 83 located on the left to the start of the vibration of the vibration speaker 81 located on the right is taken as the second off time T21. The signal output unit 59 sets the first off time T1 l shorter than the second off time T2 l. By setting each of the off times T11 and T21, the vibration of the series of vibration speakers 81 and 82 reminds the driver of an image moving to the left.
尚、右旋回動作提示及び左旋回動作提示では、二つの振動スピーカ81,83の振動のオン時間及び強さ(振幅)は、実質同一とされる。さらに、各提示動作にて各振動スピーカ81~83に入力される信号波は、立ち上がり時間よりも立ち下がり時間が短い連続した三角波である。こうした駆動信号の波形により、足裏を突き上げるような振動が、各提示面部81a~83aから足裏の各位置に伝搬する。
In the right turning motion presentation and the left turning motion presentation, the on time and strength (amplitude) of the vibration of the two vibration speakers 81 and 83 are substantially the same. Furthermore, the signal waves input to the respective vibration speakers 81 to 83 in each presentation operation are continuous triangular waves whose fall time is shorter than the rise time. With such a waveform of the drive signal, vibrations that push up the sole are transmitted from the respective presentation surface portions 81a to 83a to respective positions on the sole.
ここまで説明した第一実施形態のように、複数の提示面部81a~83aの振動を個別に制御すれば、自律走行する車両に将来的に生じる挙動変化の内容が、運転者に通知可能となる。このように振動によって将来挙動を通知可能であれば、フットレスト等を動かすための機構は、省略され得る。したがって、情報提示のための構成の車両への搭載性を確保したうえで、体性感覚を通じたユーザへの挙動変化の通知が可能になる。
As in the first embodiment described above, if the vibrations of the plurality of presentation surfaces 81a to 83a are individually controlled, it is possible to notify the driver of the contents of the behavior change that will occur to the autonomously traveling vehicle in the future. . The mechanism for moving the footrest or the like can be omitted if the behavior can be notified by vibration in the future. Therefore, while ensuring the mountability of the configuration for information presentation to the vehicle, it becomes possible to notify the user of the behavior change through the somatic feeling.
加えて第一実施形態のような振動による情報提示であれば、仮に運転席11に着座した運転者の姿勢が変化し、運転者の体幹に大きなずれが生じた場合でも、フットレストの姿勢を変化させる形態と比較して、情報提示の運転者への伝わり易さは、維持され得る。即ち、振動による情報提示は、フットレストの姿勢変化による情報提示よりも、体幹ずれへの耐性が確保され易い。
In addition, in the case of information presentation by vibration as in the first embodiment, the posture of the driver sitting on the driver's seat 11 changes temporarily, and the posture of the footrest can be changed even if a large gap occurs in the driver's trunk. The ease of transmission of the information presentation to the driver as compared to the changing form can be maintained. That is, the information presentation by vibration is easier to ensure tolerance to trunk displacement than the information presentation by the posture change of the footrest.
また第一実施形態では、将来の挙動変化によって車両に加速度が生じる場合、信号出力部53は、複数の提示面部81a~83aのうちで、発生予定の加速度の方向に沿って並ぶ少なくとも二つを交互に振動させる。こうした制御によれば、フットレスト装置100が簡素な構成であっても、将来の挙動変化によって車両に生じる加速度の向きは、運転者に分かり易く通知され得る。
In the first embodiment, when acceleration is generated in the vehicle by a future behavior change, the signal output unit 53 sets at least two of the plurality of presentation surface units 81 a to 83 a along the direction of the acceleration to be generated. Vibrate alternately. According to such control, even if the footrest device 100 has a simple configuration, the driver can be easily notified of the direction of the acceleration generated in the vehicle by the future behavior change.
第一実施形態の加速動作提示では、振動スピーカ82の振動停止後から、前方スピーカ群80fの振動開始までの第一オフ時間T1fが、前方スピーカ群80fの振動停止後から振動スピーカ82の振動開始まで第二オフ時間T2fよりも短く規定される。加えて、減速動作提示、右旋回動作提示及び左旋回動作提示のそれぞれにて、各第一オフ時間T1b,T1r,T1lは、各第二オフ時間T2b,T2r,T2lよりも短くされている。以上のように、各振動スピーカ81~83を交互に振動させつつ、各オフ時間の長さを加速度の方向によって変える制御によれば、車両に発生予定の加速度の前後方向及び左右方向が、運転者にさらに分かり易く通知され得る。
In the acceleration operation presentation of the first embodiment, the first off time T1f from the stop of the vibration of the vibration speaker 82 to the start of the vibration of the front speaker group 80f is the start of the vibration of the vibration speaker 82 after the stop of the vibration of the front speaker group 80f. It is defined to be shorter than the second off time T2f. In addition, each of the first off-times T1 b, T1 r, T1 l is shorter than the respective second off-times T2 b, T2 r, T2 l in each of the deceleration action presentation, the right turning action presentation, and the left turning action presentation. . As described above, according to the control in which the length of each off time is changed depending on the direction of acceleration while vibrating each vibration speaker 81 to 83 alternately, the longitudinal and lateral directions of the acceleration to be generated in the vehicle Can be notified to the person in a more understandable manner.
第一実施形態では、各提示面部81a~83aの振動による挙動変化の内容の予告は、車両に挙動変化が発生する以前に終了される。このように、挙動変化の発生以前に、振動スピーカ81~83の振動による予告が完了されれば、運転者は、予告から挙動変化が開始までのタイミングを感覚的に把握し易くなる。故に、体性感覚を通じた運転者への挙動変化の通知は、運転者にとって分かり易い情報提示となり得る。
In the first embodiment, the advance notice of the contents of the behavior change due to the vibration of each of the presentation surface portions 81a to 83a is ended before the behavior change occurs in the vehicle. As described above, if the advance notice due to the vibration of the vibration speakers 81 to 83 is completed before the occurrence of the behavior change, the driver can easily grasp the timing from the advance notice to the start of the behavior change. Therefore, the notification of the behavior change to the driver through somatic sensation can be information presentation that is easy for the driver to understand.
尚、第一実施形態では、HCU40が「情報提示制御装置」に相当し、モード遷移制御部52(S112)が「挙動判定部」に相当し、信号出力部53が「提示制御部」に相当し、走行計画が「挙動情報」に相当する。また、加速動作提示では、提示面部81a,83aが「第一提示面部」に相当し、他方の(残りの)提示面部82aが「第二提示面部」に相当する。一方で、減速動作提示では、提示面部82aが「第一提示面部」に相当し、提示面部81a,83aが「第二提示面部」に相当する。同様に、右旋回動作提示では、提示面部81aが「第一提示面部」に相当し、提示面部83aが「第二提示面部」に相当する一方で、左旋回動作提示では、提示面部83aが「第一提示面部」に相当し、提示面部81aが「第二提示面部」に相当する。
In the first embodiment, the HCU 40 corresponds to the “information presentation control device”, the mode transition control unit 52 (S112) corresponds to the “behavior determination unit”, and the signal output unit 53 corresponds to the “presentation control unit”. The travel plan corresponds to "behavior information". Moreover, in acceleration operation | movement presentation, presentation surface part 81a, 83a corresponds to a "1st presentation surface part", and the other (remaining) presentation surface part 82a corresponds to a "2nd presentation surface part." On the other hand, in the deceleration operation presentation, the presentation surface 82a corresponds to the "first presentation surface", and the presentation surfaces 81a and 83a correspond to the "second presentation surface". Similarly, in the right turn operation presentation, the presentation surface 81a corresponds to the "first presentation surface" and the presentation surface 83a corresponds to the "second presentation surface", while in the left rotation operation presentation, the presentation surface 83a is It corresponds to a "1st presentation surface part", and the presentation surface part 81a corresponds to a "2nd presentation surface part."
(第二実施形態)
図19A~図21Bに示す本開示の第二実施形態は、第一実施形態の変形例である。第二実施形態の要請度提示モード及び先行提示モードでは、各振動スピーカ81~83の振動パターンが第一実施形態とは異なっている。 Second Embodiment
The second embodiment of the present disclosure shown in FIGS. 19A to 21B is a modification of the first embodiment. In the demand degree presentation mode and the prior presentation mode of the second embodiment, the vibration patterns of therespective vibration speakers 81 to 83 are different from those of the first embodiment.
図19A~図21Bに示す本開示の第二実施形態は、第一実施形態の変形例である。第二実施形態の要請度提示モード及び先行提示モードでは、各振動スピーカ81~83の振動パターンが第一実施形態とは異なっている。 Second Embodiment
The second embodiment of the present disclosure shown in FIGS. 19A to 21B is a modification of the first embodiment. In the demand degree presentation mode and the prior presentation mode of the second embodiment, the vibration patterns of the
要請度提示モードでは、運転参加の要請度に応じて、振動スピーカ82のインターバルTin1,Tin2に加えて、振幅の大きさも変更される。図19A、図19Bに示すように、運転参加の要請度が「高」である場合の振幅(実線参照)は、運転参加の要請度が「低」である場合の振幅(一点鎖線参照)よりも大きくされる。こうした制御により、運転参加の要請度が上昇した場合に、その旨を運転者にさらに明確に伝えることができる。
In the request degree presentation mode, in addition to the intervals Tin1 and Tin2 of the vibration speaker 82, the magnitude of the amplitude is also changed according to the request degree of the driving participation. As shown in FIGS. 19A and 19B, the amplitude (see solid line) when the degree of request for driving participation is “high” is from the amplitude (see the alternate long and short dashed line) when the degree of request for driving participation is “low”. Is also enlarged. By such control, when the degree of request for participation in driving is increased, it is possible to more clearly notify the driver to that effect.
先行提示モードでは、三つの振動スピーカ81~83の振動が同時に開始される。具体的に、図20A、図20Bに示す右旋回動作提示では、振動スピーカ81の振動を継続させるオン時間Tonrが、振動スピーカ82,83の振動を継続させるオン時間Tonlの二倍程度に設定されている。即ち、信号出力部53(図2参照)は、各振動スピーカ81~83の振動を開始させた後、振動スピーカ82,83の振動を振動スピーカ81よりも早く停止させる。こうした各オン時間Tonl,Tonrの設定により、一連の振動スピーカ81~83の振動は、先に停止される振動スピーカ82,83の振動の余韻を利用して、右方向へ移動するイメージを運転者に想起させる。尚、右旋回動作提示として、振動スピーカ81~83の振動パターンが、所定の時間間隔を開けて複数回繰り返されてもよい。
In the preceding presentation mode, the vibration of the three vibration speakers 81 to 83 is simultaneously started. Specifically, in the right-turning action presentation shown in FIGS. 20A and 20B, the on time Tonr for continuing the vibration of the vibration speaker 81 is set to about twice the on time Tonl for continuing the vibration of the vibration speakers 82 and 83. It is done. That is, after the vibration of the vibration speakers 81 to 83 is started, the signal output unit 53 (see FIG. 2) stops the vibration of the vibration speakers 82 and 83 earlier than the vibration speaker 81. By setting each on-time Ton1 and Tonr, the vibration of the series of vibration speakers 81 to 83 makes use of the aftermath of the vibration of the vibration speakers 82 and 83 stopped earlier to move the image moving rightward to the driver. Remind me. The vibration patterns of the vibration speakers 81 to 83 may be repeated a plurality of times at predetermined time intervals as the right turning operation presentation.
図21A、図21Bに示す左旋回動作提示では、振動スピーカ83の振動を継続させるオン時間Tonlが、振動スピーカ81,82の振動を継続させるオン時間Tonrの二倍程度に設定されている。即ち、信号出力部53(図2参照)は、各振動スピーカ81~83の振動を開始させた後、振動スピーカ81,82の振動を振動スピーカ83よりも早く停止させる。こうした各オン時間Tonr,Tonlの設定により、一連の振動スピーカ81~83の振動は、先に停止される振動スピーカ81,82の振動の余韻を利用して、左方向へ移動するイメージを運転者に想起させる。尚、左旋回動作提示として、振動スピーカ81~83の振動パターンが、所定の時間間隔を開けて複数回繰り返されてもよい。
In the left turning operation presentation shown in FIGS. 21A and 21B, the on time Ton1 for continuing the vibration of the vibration speaker 83 is set to about twice the on time Tonr for continuing the vibration of the vibration speakers 81 and 82. That is, after the vibration of the vibration speakers 81 to 83 is started, the signal output unit 53 (see FIG. 2) stops the vibration of the vibration speakers 81 and 82 earlier than the vibration speaker 83. By setting each on-time Tonr, Tonl, the vibration of the series of vibration speakers 81 to 83 uses the afterglow of the vibration of the vibration speakers 81 and 82 to be stopped first to move the image moving in the left direction to the driver. Remind me. The vibration patterns of the vibration speakers 81 to 83 may be repeated a plurality of times at predetermined time intervals as the left turning motion presentation.
さらに、加速動作提示では、各振動スピーカ81~83の振動が同時に開始された後、振動スピーカ82の振動が、前方スピーカ群80fよりも早く停止される。同様に、減速動作提示では、各振動スピーカ81~83の振動が同時に開始された後、前方スピーカ群80fの振動が、振動スピーカ82よりも早く停止される。このような制御でも、先に停止される振動スピーカ81~83の振動の余韻を利用して、前方向又は後方向へ移動するイメージが、運転者に想起され得る。
Furthermore, in the acceleration operation presentation, after the vibration of each of the vibration speakers 81 to 83 is simultaneously started, the vibration of the vibration speaker 82 is stopped earlier than the front speaker group 80f. Similarly, in the deceleration operation presentation, after the vibration of each of the vibration speakers 81 to 83 is simultaneously started, the vibration of the front speaker group 80f is stopped earlier than the vibration speaker 82. Even with such control, an image moving forward or backward can be recalled to the driver by using the aftermath of the vibration of the vibration speakers 81 to 83 which are stopped first.
ここまで説明した第二実施形態の先行提示モードのように、振動を停止させた振動スピーカ81~83の余韻を利用した提示方法であっても、第一実施形態と同様に、運転者への挙動変化の内容は、高い確実性をもって通知可能となる。
As in the preceding presentation mode of the second embodiment described above, even in the presentation method using the afterglow of the vibration speakers 81 to 83 whose vibration has been stopped, to the driver as in the first embodiment, The content of the behavior change can be notified with high certainty.
(第三実施形態)
図22A、図22B及び図23A、図23Bに示す本開示の第三実施形態は、第二実施形態の変形例である。第三実施形態の右旋回動作提示及び左旋回動作提示では、振動スピーカ81,83のみが振動し、振動スピーカ82は、停止状態を維持する。具体的に、図22A、図22Bに示す右旋回動作提示では、振動スピーカ81の振動を継続させるオン時間Tonrが、振動スピーカ83の振動を継続させるオン時間Tonlの二倍程度に設定されている。即ち、信号出力部53(図2参照)は、提示面部81a及び提示面部83aの両方の振動を同時に開始させた後、提示面部83aの振動を提示面部81aよりも早く停止させる。以上により、先に停止された提示面部83aの振動の余韻と、継続された提示面部81aの振動との対比から、右方向へ移動するイメージが運転者に想起され得る。 Third Embodiment
The third embodiment of the present disclosure shown in FIGS. 22A, 22B and 23A, 23B is a modification of the second embodiment. In the right turn operation presentation and the left turn operation presentation of the third embodiment, only the vibration speakers 81 and 83 vibrate, and the vibration speaker 82 maintains the stop state. Specifically, in the right-turning action presentation shown in FIGS. 22A and 22B, the on-time Tonr for continuing the vibration of the vibration speaker 81 is set to about twice the on-time Tonl for continuing the vibration of the vibration speaker 83. There is. That is, the signal output unit 53 (see FIG. 2) stops the vibration of the presentation surface 83a faster than the presentation surface 81a after simultaneously causing the vibration of both the presentation surface 81a and the presentation surface 83a. From the above, the driver may recall an image moving to the right from the contrast between the continuation of the vibration of the presentation surface 83a stopped earlier and the vibration of the presentation surface 81a continued.
図22A、図22B及び図23A、図23Bに示す本開示の第三実施形態は、第二実施形態の変形例である。第三実施形態の右旋回動作提示及び左旋回動作提示では、振動スピーカ81,83のみが振動し、振動スピーカ82は、停止状態を維持する。具体的に、図22A、図22Bに示す右旋回動作提示では、振動スピーカ81の振動を継続させるオン時間Tonrが、振動スピーカ83の振動を継続させるオン時間Tonlの二倍程度に設定されている。即ち、信号出力部53(図2参照)は、提示面部81a及び提示面部83aの両方の振動を同時に開始させた後、提示面部83aの振動を提示面部81aよりも早く停止させる。以上により、先に停止された提示面部83aの振動の余韻と、継続された提示面部81aの振動との対比から、右方向へ移動するイメージが運転者に想起され得る。 Third Embodiment
The third embodiment of the present disclosure shown in FIGS. 22A, 22B and 23A, 23B is a modification of the second embodiment. In the right turn operation presentation and the left turn operation presentation of the third embodiment, only the
一方、図23A、図23Bに示す左旋回動作提示では、振動スピーカ83の振動を継続させるオン時間Tonlが、振動スピーカ81の振動を継続させるオン時間Tonrの二倍程度に設定されている。即ち、信号出力部53(図2参照)は、提示面部83a及び提示面部81aの両方の振動を同時に開始させた後、提示面部81aの振動を提示面部83aよりも早く停止させる。以上により、先に停止された提示面部81aの振動の余韻と、継続された提示面部83aの振動との対比から、左方向へ移動するイメージが運転者に想起され得る。
On the other hand, in the left turning operation presentation shown in FIGS. 23A and 23B, the on time Ton1 for continuing the vibration of the vibration speaker 83 is set to about twice the on time Tonr for continuing the vibration of the vibration speaker 81. That is, the signal output unit 53 (see FIG. 2) stops the vibration of the presentation surface 81a faster than the presentation surface 83a after simultaneously causing the vibrations of both the presentation surface 83a and the presentation surface 81a. From the above, the driver may recall an image moving in the left direction from the contrast between the continuation of the vibration of the presentation surface 81a stopped earlier and the vibration of the presentation surface 83a continued.
以上の第三実施形態の先行提示モードでも、第二実施形態と同様に、振動を停止させた振動スピーカ81~83の余韻を利用することで、体性感覚を通じたユーザへの挙動変化の内容の通知が可能になる。尚、右旋回動作提示及び左旋回動作提示として、振動スピーカ81,83の振動パターンが、所定の時間間隔を開けて複数回繰り返されてもよい。また、第三実施形態における加速動作提示及び減速動作提示は、第二実施形態と実質同一であってよい。
Also in the preceding presentation mode of the above third embodiment, as in the second embodiment, the contents of the behavior change to the user through the somatic sensation by using the afterglow of the vibration speakers 81 to 83 whose vibration is stopped. Notification of is possible. The vibration patterns of the vibration speakers 81 and 83 may be repeated a plurality of times with a predetermined time interval as the right turning operation presentation and the left turning operation presentation. The acceleration operation presentation and the deceleration operation presentation in the third embodiment may be substantially the same as those in the second embodiment.
(他の実施形態)
以上、本開示の複数の実施形態について説明したが、本開示は、実施形態に限定して解釈されるものではなく、本開示の要旨を逸脱しない範囲内において種々の実施形態及び組み合わせに適用することができる。 (Other embodiments)
Although the plurality of embodiments of the present disclosure have been described above, the present disclosure is not construed as being limited to the embodiments, and is applied to various embodiments and combinations without departing from the scope of the present disclosure. be able to.
以上、本開示の複数の実施形態について説明したが、本開示は、実施形態に限定して解釈されるものではなく、本開示の要旨を逸脱しない範囲内において種々の実施形態及び組み合わせに適用することができる。 (Other embodiments)
Although the plurality of embodiments of the present disclosure have been described above, the present disclosure is not construed as being limited to the embodiments, and is applied to various embodiments and combinations without departing from the scope of the present disclosure. be able to.
実施形態の変形例1によるフットレスト装置には、下ベース板に対する各振動スピーカの相対位置を、振動スピーカ毎に調整可能な調整機構が設けられている。調整機構は、下ベース板と各振動スピーカのハウジングとの間に設けられており、載置面と垂直な方向への伸縮により、提示面部の位置を移動させる。調整機能は、上カバー部材に対する提示面部の突き出し量を調整する。こうした調整機構の機能により、運転者に優先的に当てる提示面部が、例えば運転者に提示すべき情報に応じて適宜変更可能となる。尚、調整機構は、各振動スピーカに内蔵されていてもよい。
The footrest device according to the first modification of the embodiment is provided with an adjustment mechanism capable of adjusting the relative position of each vibration speaker with respect to the lower base plate for each vibration speaker. The adjustment mechanism is provided between the lower base plate and the housing of each vibration speaker, and moves the position of the presentation surface by extension and contraction in the direction perpendicular to the mounting surface. The adjustment function adjusts the amount of protrusion of the presentation surface relative to the upper cover member. The function of the adjustment mechanism allows the presentation surface to be given priority to the driver, for example, to be appropriately changed according to the information to be presented to the driver. The adjustment mechanism may be built in each vibration speaker.
実施形態では、上カバー部材に設けられた挿通開口を通じて、各提示面部が足裏に当接するように、載置面に露出していた。しかし、加振提示器である個々の振動スピーカは、載置面に露出する提示面部を有していなくてもよい。各振動スピーカは、上カバー部材及び下ベース板の間に収容された状態で、載置面上の互に異なる箇所を個別に振動させることができる。換言すれば、載置面にて振動スピーカの振動を足裏に伝搬させるための構成は、載置面を形成する上カバー部材と一体的に設けられていてもよい。
In the embodiment, through the insertion opening provided in the upper cover member, each presentation surface is exposed to the mounting surface so as to abut on the sole. However, each vibration speaker which is a vibration presentation speaker does not need to have a presentation surface part exposed to a mounting surface. Each of the vibration speakers can individually vibrate different places on the mounting surface while being accommodated between the upper cover member and the lower base plate. In other words, the configuration for propagating the vibration of the vibration speaker to the sole on the mounting surface may be provided integrally with the upper cover member forming the mounting surface.
実施形態のアタッチメントは、凸面状に湾曲した提示面部を形成するような扁平な凸球面状に形成されていた。しかし、アタッチメントの形状は、適宜変更可能である。アタッチメントは、例えば扁平な円錐状又は四角錐状であってもよく、或いは平面状の提示面部を形成する扁平な円柱状であってもよい。加えて、提示面部の表面は、平滑な状態であってもよい。或いは、滑り止めとして機能するような凹凸又は凸パターン等が、提示面部に形成されていてもよい。
The attachment of the embodiment is formed in a flat convex spherical shape that forms a convexly curved presentation surface. However, the shape of the attachment can be changed as appropriate. The attachment may, for example, be in the form of a flat cone or a square pyramid, or may be in the form of a flat cylinder forming a planar presentation surface. In addition, the surface of the presentation surface may be smooth. Alternatively, a concavo-convex or convex pattern or the like that functions as a slip stopper may be formed on the presentation surface.
さらに、個々の振動スピーカのサイズ又は形状等の要因により、各提示面部を狙いの位置に配置できない場合、アタッチメントの頂点位置を振動スピーカの中心に対して偏心させる等の形状調整により、加振ポイントの最適化が図られていてもよい。
Furthermore, when each presentation surface can not be placed at the target position due to factors such as the size or shape of each vibration speaker, the excitation point is adjusted by making the apex position of the attachment eccentric with respect to the center of the vibration speaker. The optimization of may be made.
また、挿通開口の内周壁とアタッチメントの外周壁との間には、アタッチメントから上カバー部材への振動の伝搬を防ぐ隙間が確保されていてもよい。又は、振動を伝搬させ難い柔軟な材質が、アタッチメントと挿通開口の内周壁との間に設けられていてもよい。さらに、挿通開口を載置面側又は下ベース面側から塞ぐような鍔状の部位が、アタッチメントの外周に設けられていてもよい。
In addition, a gap may be secured between the inner peripheral wall of the insertion opening and the outer peripheral wall of the attachment to prevent the propagation of vibration from the attachment to the upper cover member. Alternatively, a flexible material that hardly transmits vibration may be provided between the attachment and the inner peripheral wall of the insertion opening. Furthermore, a bowl-shaped portion that blocks the insertion opening from the mounting surface side or the lower base surface side may be provided on the outer periphery of the attachment.
実施形態では、全ての提示面部が上カバー部材から突き出していた。しかし、少なくとも一部の提示面部は、上カバー部材における底壁部の外表面と面一であってもよい。また、各提示面部の突き出し量は、適宜変更されてよく、母指球部分又は小指球部分が踵部分よりも大きくされていてよい。さらに、各提示面部の突き出し量は、互に実質同一であってもよい。
In the embodiment, all the presentation surfaces were protruded from the upper cover member. However, at least a part of the presentation surface may be flush with the outer surface of the bottom wall of the upper cover member. In addition, the protrusion amount of each presentation surface may be changed as appropriate, and the ball area of the ball of the thumb or the area of the pinky ball may be larger than that of the heel area. Furthermore, the protrusion amount of each presentation surface may be substantially the same as one another.
実施形態では、載置面に三つの提示面部が設けられていた。これら三つの提示面部の位置は、適宜変更されてよい。例えば、載置面のうちで上端よりも下端に近い領域をユーザの踵部分の載置が想定される範囲とし、提示面部82a(図4参照)は、この範囲内で適宜位置を変更されてもよい。同様に、載置面のうちで下端よりも上端に近く且つ外端よりも内端に近い領域をユーザの母指球部分の載置が想定される範囲とし、提示面部81a(図4参照)は、この範囲内で適宜位置を変更されてもよい。さらに、載置面のうちで下端よりも上端に近く且つ内端よりも外端に近い領域をユーザの母指球部分の載置が想定される範囲とし、提示面部83a(図4参照)は、この範囲内で適宜位置を変更されてもよい。また載置面の外側範囲に設けられた提示面部83aは、足裏の小指球部分ではなく、土踏まずよりも外側の足刀部分を加振可能な位置に設けられてもよい。
In the embodiment, three presentation surfaces are provided on the mounting surface. The positions of these three presentation surfaces may be changed as appropriate. For example, of the placement surfaces, an area closer to the lower end than the upper end is set as a range where placement of the heel portion of the user is assumed, and the presentation surface 82a (see FIG. 4) is appropriately changed in position within this range. It is also good. Similarly, in the mounting surface, an area closer to the upper end than the lower end and closer to the inner end than the outer end is set as a range where placement of the user's thumb ball portion is assumed, and the presentation surface 81a (see FIG. 4) May be appropriately changed within this range. Furthermore, of the placement surfaces, an area closer to the upper end than the lower end and closer to the outer end than the inner end is a range where placement of the user's thumb ball portion is assumed, and the presentation surface 83a (see FIG. 4) The position may be changed as appropriate within this range. Moreover, the presentation surface part 83a provided in the outer side range of a mounting surface may be provided in the position which can excite the toe part outside rather than the small toe ball part of a foot sole rather than an arch.
さらに、載置面に設けられる提示面部の数は、三つに限定されない。例えば、二つの提示面部のみが、長手方向又は幅方向に沿って並ぶ配置にて、載置面に設けられていてもよい。或いは、四つ以上の提示面部が、載置面に設けられていてもよい。一例として、母指球中心C1及び小指球中心C3を加振する二つの提示面部に加えて、踵中心C2を幅方向CDに挟んだ両側にて踵部分を加振する二つの提示面部が設けられていてもよい。
Furthermore, the number of presentation surface parts provided on the placement surface is not limited to three. For example, only two presentation surface parts may be provided on the placement surface in an arrangement aligned along the longitudinal direction or the width direction. Alternatively, four or more presentation surfaces may be provided on the placement surface. As an example, in addition to the two presentation surface parts that excite the torus ball center C1 and the small toe ball center C3, two presentation surface parts that excite the eyelid portion on both sides of the eyelid center C2 in the width direction CD are provided. It may be done.
実施形態にて、長手平板状とされていた載置面の形状は、適宜変更されてよい。例えば載置面は、凸状に湾曲していてもよく、具体的には、長手方向LDに僅かに曲率を有する部分円筒面状であってもよい。さらに、載置面の外形形状は、正方形状、楕円形状及び台形形状等であってもよい。
In the embodiment, the shape of the mounting surface, which is in the form of a long flat plate, may be changed as appropriate. For example, the mounting surface may be convexly curved, and specifically, may be a partially cylindrical surface having a slight curvature in the longitudinal direction LD. Furthermore, the external shape of the mounting surface may be square, elliptical, trapezoidal or the like.
実施形態のフットレスト装置は、車両の前後方向にのみ傾斜した姿勢で取付部に取り付けられていた。換言すれば、載置面73の幅方向CDは、車両の水平方向に沿っていた。しかし、フットレスト装置の取り付け姿勢は、適宜変更されてよい。例えば、幅方向CDを車両の水平方向に対して僅かに傾斜させる取り付けにより、載置面73を外側(センタートンネル側)に向けさせても良い。こうした取り付け姿勢であれば、載置面の外側範囲に設けられた提示面部83a(図4参照)と載置面の内側範囲に設けられた提示面部81a(図4参照)の突き出し量が実質同一とされてもよい。
The footrest device of the embodiment is attached to the mounting portion in a posture inclined only in the longitudinal direction of the vehicle. In other words, the width direction CD of the mounting surface 73 is in the horizontal direction of the vehicle. However, the mounting posture of the footrest device may be changed as appropriate. For example, the mounting surface 73 may be directed outward (center tunnel side) by mounting in which the width direction CD is slightly inclined with respect to the horizontal direction of the vehicle. If it is such an attachment posture, the protrusion amount of the presentation surface part 83a (refer FIG. 4) provided in the outer range of a mounting surface and the presentation surface 81a (refer FIG. 4) provided in the inner range of a mounting surface is substantially identical. It may be taken.
実施形態では、右ハンドルの車両にてセンタートンネルに隣接した位置に設けられるフットレスト装置の詳細を説明したが、このフットレスト装置は、左ハンドルの車両にてホールハウスの後方に設定されていてもよい。即ち、実質同一の構成であるフットレスト装置が、右ハンドルの車両にも左ハンドルの車両にも適用可能である。
In the embodiment, the details of the footrest device provided at a position adjacent to the center tunnel in the vehicle with the right handle have been described, but this footrest device may be set behind the hall house in the vehicle with the left handle . That is, the footrest device having substantially the same configuration is applicable to both right-handed and left-handed vehicles.
実施形態では、フットレスト装置の載置面に足裏を加振する提示面部が設けられていた。しかし、提示面部を設ける構成は、フットレスト装置に限定されない。例えば、アクセルペダル12(図1参照)、ブレーキペダル13(図1参照)又はクラッチペダル等の踏面を「載置面」とし、これらペダルの踏面に提示面部が設けられてもよい。さらに、運転席11の前方のフロア面14(図1参照)を載置面として、このフロア面14に提示面部が設けられてもよい。尚、自律走行中におけるアクセルペダル12は、運転者による踏力の印加によってストロークしないよう、特定の位置でロックされていてもよい。
In the embodiment, the presentation surface portion that excites the sole is provided on the mounting surface of the footrest device. However, the configuration for providing the presentation surface is not limited to the footrest device. For example, a tread surface such as the accelerator pedal 12 (see FIG. 1), the brake pedal 13 (see FIG. 1), or the clutch pedal may be a "mounting surface", and a presentation surface may be provided on the tread surfaces of these pedals. Furthermore, a presentation surface portion may be provided on the floor surface 14 with the floor surface 14 (see FIG. 1) in front of the driver's seat 11 as a mounting surface. The accelerator pedal 12 may be locked at a specific position so as not to stroke due to the application of the stepping force by the driver during autonomous traveling.
さらにHCUによって制御される提示面部は、運転者の足裏を加振する構成に限定されない。提示面部は、車両のユーザに接触可能であれば、車室内のどの位置に設けられていてもよい。例えば、HCUは、運転席11(図1参照)のシート座面、バックレスト及びアームレスト等に設けられた複数の提示面部の振動を個別に制御することにより、車両の将来挙動を運転者に通知してもよい。
Furthermore, the presentation surface controlled by the HCU is not limited to the configuration that excites the driver's sole. The presentation surface may be provided at any position in the vehicle compartment as long as it can contact the user of the vehicle. For example, the HCU notifies the driver of the future behavior of the vehicle by individually controlling the vibration of a plurality of presentation surfaces provided on the seat surface of the driver's seat 11 (see FIG. 1), the backrest, and the armrest. You may
実施形態では、振動スピーカが加振提示器として用いられていた。こうした振動スピーカに入力される駆動信号の波形は、適宜変更されてよい。また加振提示器は、振動スピーカに限定されない。例えば、回転中心から重心を偏心させた質量体の回転によって振動を発生させる振動モータ等が、加振提示器として用いられていてもよい。或いは、複数の提示面部の一部が振動スピーカによって形成され、他の一部が振動モータによって形成されていてもよい。
In the embodiment, the vibration speaker is used as a vibration presentation device. The waveform of the drive signal input to such a vibration speaker may be changed as appropriate. Also, the excitation presenter is not limited to the vibration speaker. For example, a vibration motor or the like that generates a vibration by rotation of a mass body whose center of gravity is offset from the rotation center may be used as a vibration presentation device. Alternatively, a part of the plurality of presentation surfaces may be formed by the vibration speaker, and another part may be formed by the vibration motor.
尚、振動スピーカにおける加振の立ち上がり及び立ち下がりの時間は、振動モータよりも短縮可能である。加えて、振動の周波数及び振幅の制御も、振動スピーカは、振動モータよりも容易である。加えて、加振スピーカは、載置面に対して垂直な方向の振動を発生させる。そのため、振動スピーカは、足裏の一部分を局所的に加振することができ、運転者による加振箇所の識別を容易にさせることができる。以上の理由から、加振提示器として、振動スピーカは、好適な構成となる。
The rise time and fall time of the excitation in the vibration speaker can be shorter than that of the vibration motor. In addition, the control of vibration frequency and amplitude is also easier for vibration speakers than vibration motors. In addition, the vibration speaker generates vibration in a direction perpendicular to the mounting surface. Therefore, the vibration speaker can locally excite a part of the foot sole, and the driver can easily identify the location of the vibration. For the above reasons, the vibration speaker has a suitable configuration as a vibration presentation device.
第一実施形態の変形例2のモード遷移制御部52(図2参照)による運転参加の要請度の判定結果は、「高」及び「低」等の離散的な値ではなく、連続的な値として出力される。そして、信号出力部53(図2参照)は、運転参加の要請度の値に基づき、オフ時間を連続的に変化させる。詳記すると、信号出力部53は、運転参加の要請度が高くなるに従って振動のインターバルを漸減させ、運転参加の要請度が低くなるに従って振動のインターバルを漸増させる。以上のように、要請度提示モードにおけるインターバルの増減は、離散的に実施されなくてもよい。また、連続的な値は、たとえば、測位信号の受信感度及び外界センサの検出状態等を変数とする関数によって決定される。
The determination result of the degree of request for operation participation by the mode transition control unit 52 (see FIG. 2) of the second modification of the first embodiment is not a discrete value such as “high” and “low” but a continuous value Is output as Then, the signal output unit 53 (see FIG. 2) continuously changes the off time based on the value of the degree of request for driving participation. More specifically, the signal output unit 53 gradually reduces the vibration interval as the degree of request for participation in driving increases, and gradually increases the interval for vibration as the degree of request for participation in driving decreases. As described above, the increase and decrease of the interval in the request degree presentation mode may not be performed discretely. In addition, the continuous value is determined by, for example, a function using the reception sensitivity of the positioning signal, the detection state of the external sensor, and the like as variables.
第一実施形態の要請度提示モードでは、踵部分に配置された振動スピーカ82(図10A、図10B参照)のみが運転者の足裏を加振していた。しかし、要請度提示モードにて鼓動を再現する振動スピーカは、踵部分に配置された振動スピーカ82だけでなくてもよい。他の振動スピーカ81,83(図10A、図10B参照)が、擬似的な鼓動を再現する振動を行ってもよい。さらに、複数の振動スピーカの同期制御により、擬似的なバイオフィードバックが実施されてもよい。
In the demand degree presentation mode of the first embodiment, only the vibration speaker 82 (see FIGS. 10A and 10B) disposed in the heel portion excites the driver's sole. However, the vibration speaker that reproduces the heartbeat in the requested degree presentation mode may not be only the vibration speaker 82 disposed in the heel portion. Other vibration speakers 81 and 83 (see FIG. 10A and FIG. 10B) may perform a vibration that reproduces a pseudo heartbeat. Furthermore, artificial biofeedback may be implemented by synchronous control of a plurality of vibration speakers.
実施形態における運転参加の要請度は、測位信号の受信感度及び外界センサの検出状態等の悪化により上昇した。このような運転参加の要請度の上昇は、例えば降雨、降雪及び濃霧等の気象条件の悪化、市街地のビル陰、トンネル、地下及び施設内への進入等に伴って発生する。さらに、車線を区画する区画線がかすれているシーン、及び急カーブへ進入するシーン等でも、運転参加の要請度の上昇が生じ得る。
The degree of request for driving participation in the embodiment increases due to deterioration of the reception sensitivity of the positioning signal, the detection state of the external sensor, and the like. Such an increase in the degree of request for driving participation occurs, for example, along with deterioration of weather conditions such as rainfall, snowfall and thick fog, building shadows in urban areas, entry into tunnels, underground and inside facilities and the like. Furthermore, even in a scene where lane markings are divided, a scene entering a sharp curve, or the like, the degree of demand for driving participation may increase.
第一実施形態の運転行動誘発モード(図12A、図12B参照)では、三つの振動スピーカ81~83が同期制御されていた。しかし、運転者に強い違和感を付与できれば、例えば三つの振動スピーカ81~83の振動をランダムに生じさせる制御が実施されてもよい。さらに、第一実施形態にて15%程度とされていたデューティ比は、適宜変更されてよい。例えば、駆動信号にてオン時間Tonの占めるデューティ比は、50%程度に設定されていてもよい。さらに、オン時間Tonのデューティ比は、時間の経過と共に徐々に引き上げられてもよい。
In the driving behavior induction mode (see FIGS. 12A and 12B) of the first embodiment, the three vibration speakers 81 to 83 are synchronously controlled. However, if strong incongruity can be given to the driver, for example, control may be performed to randomly generate vibrations of the three vibration speakers 81 to 83. Furthermore, the duty ratio, which is about 15% in the first embodiment, may be changed as appropriate. For example, the duty ratio occupied by the on time Ton in the drive signal may be set to about 50%. Furthermore, the duty ratio of the on time Ton may be gradually increased with the passage of time.
第一実施形態の変形例3,4の信号出力部53(図2参照)は、加速度の前後方向及び左右方向の区別をより容易にするため、先行提示モードにて交互に振動させる提示面部81a~83aの振動の強度(振幅)を、異なった値に設定する。具体的に、変形例3の加速動作提示では、提示面部81a,83aの振動の強度が、提示面部82aの振動の強度よりも強くされ、減速動作提示では、提示面部82aの振動の強度が、提示面部81a,83aの振動の強度よりも強くされる。同様に、変形例3の右旋回動作提示では、提示面部81aの振動の強度が、提示面部83aの振動の強度よりも強くされ、左旋回速動作提示では、提示面部83aの振動の強度が、提示面部81aの振動の強度よりも強くされる。
The signal output unit 53 (see FIG. 2) of the third and fourth modifications of the first embodiment alternately vibrates in the preceding presentation mode to distinguish between the longitudinal direction and the lateral direction of the acceleration. The strength (amplitude) of the vibration of ̃83a is set to a different value. Specifically, in the acceleration operation presentation of the third modification, the vibration intensity of the presentation surface portions 81a and 83a is stronger than the vibration intensity of the presentation surface portion 82a, and in the deceleration operation presentation, the vibration intensity of the presentation surface portions 82a is, The strength of the vibration of the presentation surface portions 81a and 83a is made stronger. Similarly, in the right turn operation presentation of the third modification, the vibration intensity of the presentation surface 81a is stronger than the vibration intensity of the presentation surface 83a, and in the left rotation speed operation presentation, the vibration intensity of the presentation surface 83a is , And the strength of the vibration of the presentation surface 81a.
対して、変形例4の加速動作提示では、提示面部82aの振動の強度が、提示面部81a,83aの振動の強度よりも強くされ、減速動作提示では、提示面部81a,83aの振動の強度が、提示面部82aの振動の強度よりも強くされる。同様に、変形例4の右旋回動作提示では、提示面部83aの振動の強度が、提示面部81aの振動の強度よりも強くされ、左旋回速動作提示では、提示面部81aの振動の強度が、提示面部83aの振動の強度よりも強くされる。
In contrast, in the acceleration operation presentation of the fourth modification, the vibration intensity of the presentation surface 82a is stronger than the vibration intensity of the presentation surfaces 81a and 83a, and in the deceleration operation presentation, the vibration intensity of the presentation surfaces 81a and 83a is , And the strength of the vibration of the presentation surface 82a. Similarly, in the right turning operation presentation of the fourth modification, the vibration intensity of the presenting surface 83a is stronger than the vibration intensity of the presenting surface 81a, and in the left turning speed operation presentation, the vibration intensity of the presenting surface 81a is , And the strength of the vibration of the presentation surface 83a.
第一実施形態での提示挙動変化の内容の予告は、車両に挙動変化が発生するよりも前に完了されていた。しかし、各動作提示の完了タイミングと、挙動変化に伴った加速度の発生開始タイミングとの前後関係は、適宜調整されてよい。例えば、動作提示の継続中に車両の挙動変化が開始されてもよい。この場合、動作提示の完了タイミングは、挙動変化に伴った加速度の発生開始タイミングよりも後になる。さらに、挙動変化に伴った加速度の発生開始タイミングと実質的に同時となるよう、動作提示の完了タイミングが設定されてもよい。
The prediction of the content of the presentation behavior change in the first embodiment was completed before the behavior change occurred in the vehicle. However, the anteroposterior relationship between the completion timing of each action presentation and the generation start timing of the acceleration accompanying the behavior change may be appropriately adjusted. For example, the behavior change of the vehicle may be initiated during the continuation of the motion presentation. In this case, the completion timing of the motion presentation is later than the generation start timing of the acceleration accompanying the behavior change. Furthermore, the completion timing of the operation presentation may be set so as to be substantially simultaneous with the generation start timing of the acceleration accompanying the behavior change.
第一実施形態にて説明の各動作提示は、車両の次の挙動として、加速、減速及び旋回のいずれか一つが実施される場合の動作提示であった。しかし、減速しながらの右旋回等、車両の次の挙動として、複合的な挙動を予定される場合が想定され得る。こうした場合、例えば、図24A、図24Bに示すような複合動作提示が実施される。詳記すると、信号出力部は、まず減速動作提示(図10A、図10B参照)のように前方スピーカ群80f及び振動スピーカ81を(例えば二回ずつ)交互に振動させる。その後、信号出力部は、右旋回動作提示(図17A、図17B参照)のように振動スピーカ81及び振動スピーカ83を(例えば二回ずつ)交互に振動させる。複合動作提示では、減速動作提示と右旋回動作提示とが複数回繰り返されてもよい。
Each motion presentation described in the first embodiment is a motion presentation when one of acceleration, deceleration, and turning is performed as the next behavior of the vehicle. However, it may be assumed that complex behavior is scheduled as the next behavior of the vehicle, such as right turn while decelerating. In such a case, for example, combined action presentation as shown in FIGS. 24A and 24B is performed. Specifically, the signal output unit first alternately vibrates the front speaker group 80f and the vibration speaker 81 (for example, twice each) as shown in the deceleration operation presentation (see FIGS. 10A and 10B). After that, the signal output unit alternately vibrates the vibration speaker 81 and the vibration speaker 83 (for example, two times each) as shown in the right-turning motion presentation (see FIGS. 17A and 17B). In the combined motion presentation, the deceleration motion presentation and the right turning motion presentation may be repeated multiple times.
実施形態にて用いられる加速閾値、減速閾値及び左右の旋回閾値は、それぞれ異なる値に設定可能である。車両のユーザは、後(減速)方向の加速度よりも、前(加速)方向及び左右方向の加速度の方が不安を感じ易い。故に、減速閾値よりも、加速閾値及び旋回閾値は、低い値に設定されてよい。さらに、次の車両挙動を積極的に先行提示する場合、各閾値は、全体的に低い値に設定されてよい。また、ユーザの煩わしさの低減を優先する場合、各閾値は、全体的に高い値に設定されてよい。これら各閾値は、車両のユーザによって調整可能であってもよい。
The acceleration threshold value, the deceleration threshold value, and the left and right turning threshold values used in the embodiment can be set to different values. The user of the vehicle is more anxious about the acceleration in the forward (acceleration) direction and the lateral direction than the acceleration in the backward (deceleration) direction. Therefore, the acceleration threshold and the turning threshold may be set to lower values than the deceleration threshold. Furthermore, if the next vehicle behavior is proactively presented, each threshold may be set to a low value as a whole. In addition, when priority is given to the reduction of the user's inconvenience, each threshold may be set to a high value as a whole. Each of these thresholds may be adjustable by the user of the vehicle.
実施形態では、HCU、駆動装置及びフットレスト装置がそれぞれ別の構成として設けられていた。しかし、駆動装置の構成は、HCU又はフットレスト装置と一体的に設けられていてもよい。さらに、フットレスト装置を制御するためのHCUの演算処理は、HCUとは異なる他の制御装置で実行されてもよく、又はフットレスト装置100に設けられた制御回路によって実行されてもよい。
In the embodiment, the HCU, the drive device and the footrest device are provided as separate configurations. However, the configuration of the drive may be provided integrally with the HCU or the footrest device. Furthermore, the arithmetic processing of the HCU for controlling the footrest device may be performed by another control device different from the HCU, or may be performed by a control circuit provided in the footrest device 100.
さらに、種々の非遷移的実体的記憶媒体(non-transitory tangible storage medium)が処理部にて実行される情報提示制御プログラムを格納する記憶部に採用可能である。こうした非遷移的実体的記憶媒体は、フラッシュメモリ、ハードディスク及び光学ディスク等の種々の不揮発性の記憶媒体であってもよく、又はRAM等の揮発性の記憶媒体であってもよい。また記憶媒体は、HCU等の制御装置に設けられた記憶部に限定されず、記憶部へのコピー元となる光学ディスク及び汎用コンピュータのハードディスクドライブ等であってもよい。
Furthermore, various non-transitory tangible storage media can be employed as a storage unit for storing an information presentation control program executed by the processing unit. Such non-transitory tangible storage media may be various non-volatile storage media such as flash memory, hard disk and optical disk, or may be volatile storage media such as RAM. The storage medium is not limited to the storage unit provided in the control device such as the HCU, and may be an optical disk serving as a copy source to the storage unit, a hard disk drive of a general-purpose computer, or the like.
ここで、本出願に記載されるフローチャート、あるいは、フローチャートの処理は、複数のステップ(あるいはセクションと言及される)から構成され、各ステップは、たとえば、S101と表現される。さらに、各ステップは、複数のサブステップに分割されることができる、一方、複数のステップが合わさって一つのステップにすることも可能である。
Here, the flowchart described in the present application or the process of the flowchart is composed of a plurality of steps (or referred to as sections), and each step is expressed as, for example, S101. Furthermore, each step may be divided into multiple sub-steps, while multiple steps may be combined into one step.
以上、本開示の一態様に係る情報提示制御装置及び、情報提示制御プログラムの実施形態、構成、態様を例示したが、本開示に係る実施形態、構成、態様は、上述した各実施形態、各構成、各態様に限定されるものではない。例えば、異なる実施形態、構成、態様にそれぞれ開示された技術的部を適宜組み合わせて得られる実施形態、構成、態様についても本開示に係る実施形態、構成、態様の範囲に含まれる。
The embodiments, configurations, and aspects of the information presentation control device and the information presentation control program according to one aspect of the present disclosure have been illustrated above, but the embodiments, configurations, and aspects according to the present disclosure are the respective embodiments described above, It is not limited to composition and each mode. For example, embodiments, configurations and aspects obtained by appropriately combining technical parts respectively disclosed in different embodiments, configurations and aspects are also included in the scope of embodiments, configurations and aspects according to the present disclosure.
The embodiments, configurations, and aspects of the information presentation control device and the information presentation control program according to one aspect of the present disclosure have been illustrated above, but the embodiments, configurations, and aspects according to the present disclosure are the respective embodiments described above, It is not limited to composition and each mode. For example, embodiments, configurations and aspects obtained by appropriately combining technical parts respectively disclosed in different embodiments, configurations and aspects are also included in the scope of embodiments, configurations and aspects according to the present disclosure.
Claims (10)
- 自動運転可能な車両に搭乗するユーザと接触するよう設けられた複数の提示面部(81a~83a)を振動させる制御により、当該ユーザに情報を提示する情報提示制御装置であって、
自律走行する前記車両の将来挙動を示した挙動情報を取得する情報取得部(51)と、
前記挙動情報に基づき、前記ユーザに提示する挙動変化が前記車両に生じるか否かを判定する挙動判定部(52)と、
前記挙動判定部にて提示すべきと判定された提示挙動変化の発生以前に、複数の前記提示面部の振動を個別に制御し、前記提示挙動変化の内容を運転者に予め通知する提示制御部(53)と、を備える情報提示制御装置。 An information presentation control device that presents information to a user by means of control of vibrating a plurality of presentation surface portions (81a to 83a) provided to be in contact with a user boarding a vehicle capable of autonomous driving,
An information acquisition unit (51) for acquiring behavior information indicating a future behavior of the vehicle traveling autonomously;
A behavior determining unit (52) that determines whether or not a change in behavior to be presented to the user occurs in the vehicle based on the behavior information;
A presentation control unit that individually controls the vibrations of the plurality of presentation surfaces before generating the presentation behavior change determined to be presented by the behavior determination unit, and notifies the driver of the content of the presentation behavior change in advance (53) An information presentation control device comprising: - 前記提示制御部は、前記提示挙動変化によって前記車両に生じる加速度の方向に沿って並ぶ少なくとも二つの前記提示面部を交互に振動させる請求項1に記載の情報提示制御装置。 The information presentation control device according to claim 1, wherein the presentation control unit alternately vibrates at least two of the presentation surface units arranged along a direction of acceleration generated in the vehicle by the presentation behavior change.
- 前記提示制御部によって振動を制御される二つ前記提示面部のうち、加速度の方向に位置する前記提示面部を第一提示面部とし、第一提示面部とは異なる前記提示面部を第二提示面部とすると、
前記提示制御部は、前記第二提示面部の振動の停止後から前記第一提示面部の振動を開始するまでの第一オフ時間(T1f,T1b,T1r,T1l)を、前記第一提示面部の振動の停止後から前記第二提示面部の振動を開始するまでの第二オフ時間(T2f,T2b,T2r,T2l)よりも短くする請求項2に記載の情報提示制御装置。 Among the two presentation surface portions whose vibration is controlled by the presentation control portion, the presentation surface portion located in the direction of acceleration is a first presentation surface portion, and the presentation surface portion different from the first presentation surface portion is a second presentation surface portion Then,
The presentation control unit is configured to perform a first off time (T1 f, T1 b, T1 r, T1 l) to start the vibration of the first presentation surface after stopping the vibration of the second presentation surface in the first presentation surface. The information presentation control device according to claim 2, wherein a second off time (T2f, T2b, T2r, T2l) from the stop of the vibration to the start of the vibration of the second presentation surface portion is made shorter. - 前記提示挙動変化によって前記車両に生じる加速度の方向に沿って並ぶ二つの前記提示面部のうち、加速度の方向に位置する前記提示面部を第一提示面部とし、第一提示面部とは異なる前記提示面部を第二提示面部とすると、
前記提示制御部は、前記第一提示面部及び前記第二提示面部の両方の振動を開始させた後、前記第二提示面部の振動を前記第一提示面部よりも早く停止させる請求項1に記載の情報提示制御装置。 Among the two presentation surface parts aligned along the direction of acceleration generated on the vehicle by the presentation behavior change, the presentation surface part located in the direction of acceleration is the first presentation surface part, and the presentation surface part different from the first presentation surface part And the second presentation surface,
The presentation control unit according to claim 1, wherein the vibration of the second presentation surface is stopped earlier than the first presentation surface after the vibration of both the first presentation surface and the second presentation surface is started. Information presentation control device. - 前記提示制御部は、前記第一提示面部を前記第二提示面部よりも強く振動させる請求項3又は4に記載の情報提示制御装置。 The information presentation control device according to claim 3, wherein the presentation control unit vibrates the first presentation surface unit more strongly than the second presentation surface unit.
- 前記提示制御部は、前記第二提示面部を前記第一提示面部よりも強く振動させる請求項3又は4に記載の情報提示制御装置。 The information presentation control device according to claim 3, wherein the presentation control unit vibrates the second presentation surface unit more strongly than the first presentation surface unit.
- 前記提示制御部は、前記車両に挙動変化が発生する以前に、複数の前記提示面部を用いた前記提示挙動変化の内容の予告を終了する請求項1~6のいずれか一項に記載の情報提示制御装置。 The information according to any one of claims 1 to 6, wherein the presentation control unit ends the advance notice of the content of the presentation behavior change using the plurality of presentation surface units before the behavior change occurs in the vehicle. Presentation control device.
- 自動運転可能な車両に搭乗するユーザと接触するよう設けられた複数の提示面部(81a~83a)を振動させる制御により、当該ユーザに情報を提示する情報提示制御プログラムであって、
少なくとも一つの処理部(41)を、
自律走行する前記車両の将来挙動を示した挙動情報を取得する情報取得部(51)と、
前記挙動情報に基づき、前記ユーザに提示する挙動変化が前記車両に生じるか否かを判定する挙動判定部(52)と、
前記挙動判定部にて提示すべきと判定された提示挙動変化の発生以前に、複数の前記提示面部の振動を個別に制御し、前記提示挙動変化の内容を運転者に予め通知する提示制御部(53)として機能させる情報提示制御プログラム。 An information presentation control program for presenting information to a user by means of control of vibrating a plurality of presentation surface parts (81a to 83a) provided to be in contact with a user boarding an autonomously drivable vehicle,
At least one processing unit (41),
An information acquisition unit (51) for acquiring behavior information indicating a future behavior of the vehicle traveling autonomously;
A behavior determining unit (52) that determines whether or not a change in behavior to be presented to the user occurs in the vehicle based on the behavior information;
A presentation control unit that individually controls the vibrations of the plurality of presentation surfaces before generating the presentation behavior change determined to be presented by the behavior determination unit, and notifies the driver of the content of the presentation behavior change in advance (53) Information presentation control program to function. - 請求項8に記載の情報提示制御プログラムを記憶する、コンピュータ読み取り可能な非一時的な記録媒体。 A non-transitory computer readable storage medium storing the information presentation control program according to claim 8.
- 自動運転可能な車両に搭乗するユーザと接触するよう設けられた複数の提示面部(81a~83a)を振動させる制御により、ユーザに情報を提示する情報提示制御方法であって、
自律走行する前記車両の将来挙動を示した挙動情報を取得すること、
前記挙動情報に基づき、前記ユーザに提示する挙動変化が前記車両に生じるか否かを判定することと、
挙動判定部にて提示すべきと判定された提示挙動変化の発生以前に、複数の前記提示面部の振動を個別に制御し、前記提示挙動変化の内容を運転者に予め通知することと、を備える情報提示制御方法。
It is an information presentation control method of presenting information to a user by control of vibrating a plurality of presentation surface parts (81a to 83a) provided to be in contact with a user boarding a vehicle capable of autonomous driving,
Acquiring behavior information indicating a future behavior of the vehicle traveling autonomously;
Determining whether or not a change in behavior to be presented to the user occurs in the vehicle based on the behavior information;
Controlling the vibrations of the plurality of presentation surfaces individually and notifying the driver of the contents of the presentation behavior change in advance, before occurrence of the presentation behavior change determined to be presented by the behavior determination unit; Information presentation control method provided.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017-150912 | 2017-08-03 | ||
| JP2017150912A JP6720939B2 (en) | 2017-08-03 | 2017-08-03 | Information presentation control device and information presentation control program |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2019026574A1 true WO2019026574A1 (en) | 2019-02-07 |
Family
ID=65232657
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2018/026140 WO2019026574A1 (en) | 2017-08-03 | 2018-07-11 | Information providing control device and information providing control program |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP6720939B2 (en) |
| WO (1) | WO2019026574A1 (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020170810A1 (en) * | 2019-02-19 | 2020-08-27 | 日本電信電話株式会社 | Information presentation system and program |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112193157A (en) * | 2020-10-21 | 2021-01-08 | 恒大恒驰新能源汽车研究院(上海)有限公司 | Footrest information reminding device, control method thereof and vehicle-mounted control terminal |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006119840A (en) * | 2004-10-20 | 2006-05-11 | Hitachi Ltd | Warning device for vehicle |
| JP2016199081A (en) * | 2015-04-07 | 2016-12-01 | 株式会社日本自動車部品総合研究所 | Information provision device |
| JP2017076232A (en) * | 2015-10-14 | 2017-04-20 | トヨタ自動車株式会社 | Vehicle-purposed notification device |
-
2017
- 2017-08-03 JP JP2017150912A patent/JP6720939B2/en not_active Expired - Fee Related
-
2018
- 2018-07-11 WO PCT/JP2018/026140 patent/WO2019026574A1/en active Application Filing
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006119840A (en) * | 2004-10-20 | 2006-05-11 | Hitachi Ltd | Warning device for vehicle |
| JP2016199081A (en) * | 2015-04-07 | 2016-12-01 | 株式会社日本自動車部品総合研究所 | Information provision device |
| JP2017076232A (en) * | 2015-10-14 | 2017-04-20 | トヨタ自動車株式会社 | Vehicle-purposed notification device |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020170810A1 (en) * | 2019-02-19 | 2020-08-27 | 日本電信電話株式会社 | Information presentation system and program |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6720939B2 (en) | 2020-07-08 |
| JP2019026216A (en) | 2019-02-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6686869B2 (en) | Driving change control device and driving change control method | |
| JP6443403B2 (en) | Vehicle control device | |
| US10093316B2 (en) | Vehicle traveling control device | |
| JP6176264B2 (en) | Automated driving vehicle system | |
| WO2017064941A1 (en) | Notification management device and notification management method | |
| JP2017019436A (en) | Automatic operation system | |
| JPWO2011138855A1 (en) | Awakening state maintaining device and awakening state maintaining method | |
| JPWO2018134994A1 (en) | Vehicle control system, vehicle control method, and vehicle control program | |
| CN108327592B (en) | Vehicle control system, vehicle control method, and storage medium | |
| JP6856086B2 (en) | Notification management device and notification management program | |
| WO2019026574A1 (en) | Information providing control device and information providing control program | |
| JP2012006518A (en) | Obstacle position indicating apparatus and system | |
| JP6658146B2 (en) | Approval control device and approval control method | |
| JP2023174666A (en) | Vibration generation device | |
| CN109863060A (en) | For controlling the method for the massage unit for the massage apparatus being arranged in seat, for the seat arrangement in vehicle or vehicle | |
| JP6885003B2 (en) | Vehicle control device | |
| JP6766791B2 (en) | Status detector, status detection system and status detection program | |
| WO2019163883A1 (en) | Information presentation device that provides vehicle information to user | |
| WO2019026573A1 (en) | Information provision control device and information provision control program | |
| WO2019026571A1 (en) | Information providing apparatus | |
| CN115349144A (en) | Presentation control device and presentation control program | |
| WO2019026572A1 (en) | Information provision device | |
| CN112141131A (en) | Vehicle control system, vehicle control method, and storage medium | |
| WO2023084664A1 (en) | Driving skill evaluation system, information processing device, vehicle and computer program, and recording medium with computer program recorded therein | |
| US20230077600A1 (en) | Seat for moving device, seat control device, and seat control method |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 18840152 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 18840152 Country of ref document: EP Kind code of ref document: A1 |