WO2018207767A1 - ターボ圧縮機 - Google Patents
ターボ圧縮機 Download PDFInfo
- Publication number
- WO2018207767A1 WO2018207767A1 PCT/JP2018/017747 JP2018017747W WO2018207767A1 WO 2018207767 A1 WO2018207767 A1 WO 2018207767A1 JP 2018017747 W JP2018017747 W JP 2018017747W WO 2018207767 A1 WO2018207767 A1 WO 2018207767A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- drive shaft
- support
- turbo compressor
- magnetic flux
- current
- Prior art date
Links
Images







































Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D27/00—Control, e.g. regulation, of pumps, pumping installations or pumping systems specially adapted for elastic fluids
- F04D27/02—Surge control
- F04D27/0261—Surge control by varying driving speed
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D17/00—Radial-flow pumps, e.g. centrifugal pumps; Helico-centrifugal pumps
- F04D17/08—Centrifugal pumps
- F04D17/10—Centrifugal pumps for compressing or evacuating
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D25/00—Pumping installations or systems
- F04D25/02—Units comprising pumps and their driving means
- F04D25/06—Units comprising pumps and their driving means the pump being electrically driven
- F04D25/0606—Units comprising pumps and their driving means the pump being electrically driven the electric motor being specially adapted for integration in the pump
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D27/00—Control, e.g. regulation, of pumps, pumping installations or pumping systems specially adapted for elastic fluids
- F04D27/001—Testing thereof; Determination or simulation of flow characteristics; Stall or surge detection, e.g. condition monitoring
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D29/00—Details, component parts, or accessories
- F04D29/05—Shafts or bearings, or assemblies thereof, specially adapted for elastic fluid pumps
- F04D29/051—Axial thrust balancing
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D29/00—Details, component parts, or accessories
- F04D29/05—Shafts or bearings, or assemblies thereof, specially adapted for elastic fluid pumps
- F04D29/056—Bearings
- F04D29/057—Bearings hydrostatic; hydrodynamic
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D29/00—Details, component parts, or accessories
- F04D29/05—Shafts or bearings, or assemblies thereof, specially adapted for elastic fluid pumps
- F04D29/056—Bearings
- F04D29/058—Bearings magnetic; electromagnetic
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C32/00—Bearings not otherwise provided for
- F16C32/04—Bearings not otherwise provided for using magnetic or electric supporting means
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C32/00—Bearings not otherwise provided for
- F16C32/04—Bearings not otherwise provided for using magnetic or electric supporting means
- F16C32/0406—Magnetic bearings
- F16C32/044—Active magnetic bearings
- F16C32/0474—Active magnetic bearings for rotary movement
- F16C32/048—Active magnetic bearings for rotary movement with active support of two degrees of freedom, e.g. radial magnetic bearings
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F24—HEATING; RANGES; VENTILATING
- F24F—AIR-CONDITIONING; AIR-HUMIDIFICATION; VENTILATION; USE OF AIR CURRENTS FOR SCREENING
- F24F5/00—Air-conditioning systems or apparatus not covered by F24F1/00 or F24F3/00, e.g. using solar heat or combined with household units such as an oven or water heater
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F25—REFRIGERATION OR COOLING; COMBINED HEATING AND REFRIGERATION SYSTEMS; HEAT PUMP SYSTEMS; MANUFACTURE OR STORAGE OF ICE; LIQUEFACTION SOLIDIFICATION OF GASES
- F25B—REFRIGERATION MACHINES, PLANTS OR SYSTEMS; COMBINED HEATING AND REFRIGERATION SYSTEMS; HEAT PUMP SYSTEMS
- F25B1/00—Compression machines, plants or systems with non-reversible cycle
- F25B1/04—Compression machines, plants or systems with non-reversible cycle with compressor of rotary type
- F25B1/053—Compression machines, plants or systems with non-reversible cycle with compressor of rotary type of turbine type
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K7/00—Arrangements for handling mechanical energy structurally associated with dynamo-electric machines, e.g. structural association with mechanical driving motors or auxiliary dynamo-electric machines
- H02K7/08—Structural association with bearings
- H02K7/09—Structural association with bearings with magnetic bearings
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K7/00—Arrangements for handling mechanical energy structurally associated with dynamo-electric machines, e.g. structural association with mechanical driving motors or auxiliary dynamo-electric machines
- H02K7/14—Structural association with mechanical loads, e.g. with hand-held machine tools or fans
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P25/00—Arrangements or methods for the control of AC motors characterised by the kind of AC motor or by structural details
- H02P25/02—Arrangements or methods for the control of AC motors characterised by the kind of AC motor or by structural details characterised by the kind of motor
- H02P25/022—Synchronous motors
- H02P25/024—Synchronous motors controlled by supply frequency
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F05—INDEXING SCHEMES RELATING TO ENGINES OR PUMPS IN VARIOUS SUBCLASSES OF CLASSES F01-F04
- F05D—INDEXING SCHEME FOR ASPECTS RELATING TO NON-POSITIVE-DISPLACEMENT MACHINES OR ENGINES, GAS-TURBINES OR JET-PROPULSION PLANTS
- F05D2260/00—Function
- F05D2260/80—Diagnostics
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F05—INDEXING SCHEMES RELATING TO ENGINES OR PUMPS IN VARIOUS SUBCLASSES OF CLASSES F01-F04
- F05D—INDEXING SCHEME FOR ASPECTS RELATING TO NON-POSITIVE-DISPLACEMENT MACHINES OR ENGINES, GAS-TURBINES OR JET-PROPULSION PLANTS
- F05D2270/00—Control
- F05D2270/80—Devices generating input signals, e.g. transducers, sensors, cameras or strain gauges
- F05D2270/821—Displacement measuring means, e.g. inductive
Definitions
- the present invention relates to a turbo compressor.
- a turbo compressor including an impeller and a drive shaft attached to the impeller is known (for example, Patent Document 1).
- the turbo compressor disclosed in this document includes an electric motor for rotationally driving an impeller and a drive shaft, two radial magnetic bearings that support the radial load of the drive shaft in a non-contact manner by electromagnetic force, and an axial position of the drive shaft. And a thrust magnetic bearing controlled in a non-contact manner by force. Two radial magnetic bearings are arranged one on each side of the electric motor.
- the present invention has been made in view of such a point, and an object thereof is to provide a turbo compressor to which a bearingless motor is applied.
- the first aspect of the present disclosure is directed to a turbo compressor (101, 210, 410, 601, 701, 812) that is provided in a refrigerant circuit that performs a refrigeration cycle and compresses the refrigerant.
- the turbo compressor (101,210,410,601,701,812) rotationally drives the impeller (120,221,421,603a, 720,821), the drive shaft (130,240,440,605,730,831), and the drive shaft (130,240,440,605,730,831) by electromagnetic force generated by the current flowing within a predetermined current range.
- the driving support part for supporting the drive shaft radial load (130,240,440,605,730,831) in a non-contact and (160,170,180,250,260,450,460,621,640,760,770,780,782,784,787,840,850), the driving support part (160,170,180,250,260,450,460,621,640,760,770,780,782, 784,787,840,850) is a pair of rotors (161,171,251,451,641,761,771,841,851) and stator (164,174,254,454,644,762,772,844,854) And at least one bearingless motor (160,170,250,450,640,760,770,840,850) that rotationally drives the drive shaft (130,240,440,605,730,831) and supports the radial load of the drive shaft (130,240,440,605,730,831) in a non-contact manner.
- the bearingless motor 160, 170, 250, 450, 640, 760, 770, 840, 850
- the impeller (120, 221, 421, 603a, 720, 821) and the drive shaft (130, 240, 440, 605, 730, 831) do not need to generate a large driving torque
- the rotor 161,171,251,451,641,761,771,841,851 and the magnetic circuit formed by the stator (164,174,254,454,644,762,772,844,854) can be effectively used to generate a supporting force for supporting the radial load of the drive shaft (130,240,440,605,730,831).
- the bearingless motor 160, 170, 250, 450, 640, 760, 770, 840, 850
- the rotor (161, 171, 251, 451, 641, 761, 771, 841, 851) and the stator
- the magnetic circuit formed by (164,174,254,454,644,762,772,844,854) can be effectively used to rotationally drive the impeller (120,221,421,603a, 720,821) and the drive shaft (130,240,440,605,730,831).
- a magnetic flux generated in the drive support portion (160, 170, 180) for rotationally driving the impeller (120) and the drive shaft (130) is a drive magnetic flux BM.
- the turbo compressor (101) is operated in the region where the stalling stall occurs and the surging region, the current for generating the driving magnetic flux BM when compared at the same rotational speed is higher than that during normal operation.
- the second aspect corresponds to the fact that when compared at the same rotational speed, the radial load of the drive shaft (130) becomes larger in the region where the rotation stall occurs and in the surging region than during normal operation. That is, when operating the turbo compressor (101) in the region where the rotation stall occurs and the surging region, the ratio of the current IS for generating the supporting magnetic flux BS to the current IM for generating the driving magnetic flux BM is expressed as follows: Increase compared to normal operation. As a result, the turbo compressor (101) can be operated without any problem even in the region where the rotation stall occurs and the surging region.
- a magnetic flux generated in the drive support portion (160, 170, 180) for rotationally driving the impeller (120) and the drive shaft (130) is a drive magnetic flux BM.
- the turbo compressor (101) is operated in the region where the stalling stall occurs and the surging region, the current IM for generating the driving magnetic flux BM when compared at the same rotational speed as the refrigerant volume flow rate decreases.
- the turbo compressor (101) when the turbo compressor (101) is operated in the region where the rotation stall occurs and in the surging region, as the refrigerant volume flow rate decreases, the comparison is made at the same rotation speed, and the driving is performed as the refrigerant volume flow rate decreases.
- the turbo compressor (101) can be operated without any problem even in the region where the rotation stall occurs and the surging region.
- a magnetic flux generated in the drive support portion (160, 170, 180) for rotationally driving the impeller (120) and the drive shaft (130) is a drive magnetic flux BM.
- the magnetic flux generated in the drive support portion (160, 170, 180) to support the radial load of the drive shaft (130) is used as a support magnetic flux BS, and the drive magnetic flux BM in a predetermined operation region of the turbo compressor (101).
- BM + BS) max the magnetic flux generated in the drive support portion (160, 170, 180) to generate the drive torque corresponding to the maximum torque load in the predetermined operation region is defined as BMmax.
- BSmax is a magnetic flux generated in the drive support portion (160, 170, 180) to support the maximum radial load of the drive shaft (130) in the predetermined operation region.
- the drive support portion (160, 170, 180) is (BM + BS ) It is configured so that the relationship of max ⁇ Bmax ⁇ BMmax + BSmax is established.
- the current flowing through the drive support portion (160, 170, 180) is within a predetermined current range.
- the magnetic flux Bmax generated in the drive support portion (160, 170, 180) when the current flowing through the drive support portion (160, 170, 180) is the upper limit value of the predetermined current range is equal to or greater than (BM + BS) max.
- the drive support portion (160, 170, 180) is configured to be less than BMmax + BSmax ((BM + BS) max ⁇ Bmax ⁇ BMmax + BSmax).
- the stator (164,174) and the rotor (161,171) of the bearingless motor (160,170) can be reduced in size compared to the case where the drive support portion (160,170,180) is configured according to a normal concept. Become.
- the drive support portion (160, 170, 180) includes coils (166a to 166c, 167a to 167c, 176a to 176c, 177a) through which a current within the predetermined current range flows.
- BMmax is a magnetic flux generated in the drive support section (160, 170, 180), and a current flowing through the coils (166a to 166c, 167a to 167c, 176a to 176c, 177a to 177c, 184) at that time is a maximum torque current IBMmax.
- BSmax is a magnetic flux generated in the drive support portion (160, 170, 180) when supporting the maximum radial load of the drive shaft (130), and the coils (166a to 166c, 167a to 167c, 176a to 176c, 177a) 177c, 184) is defined as the maximum support force current IBSmax, and the current obtained by adding the maximum torque current IBMmax and the maximum support force current IBSmax is the coil (166a to 166c, 167a to 167c, 176a to 176c, 177a to 177c, 184), where the magnetic flux generated in the drive support portion (160, 170, 180) is BMSmax, the drive support portion (160, 170, 180) is configured to satisfy the relationship BMSmax ⁇ BMmax + BSmax. It is characterized by.
- a current obtained by adding the maximum torque current IBMmax and the maximum support force current IBSmax is passed through the coils (166a to 166c, 167a to 167c, 176a to 176c, 177a to 177c, 184).
- the drive support portion (160, 170, 180) is configured such that the magnetic flux BMSmax generated in the drive support portion (160, 170, 180) is less than BMmax + BSmax (BMSmax ⁇ BMmax + BSmax).
- stator (164,174) and the rotor (161,171) of the bearingless motor (160,170) can be reduced in size compared to the case where the drive support portion (160,170,180) is configured according to a normal concept. Become.
- the present inventor has found that the operating region where the maximum driving torque is required and the operating region where the maximum radial load bearing force is required are different from each other in the turbo compressor (101) for the refrigeration system. Based on. That is, since it is not necessary to simultaneously generate both the maximum drive torque and the maximum radial load support force in the drive support portion (160, 170, 180), according to the fifth aspect, the drive is performed so that the relationship BMSmax ⁇ BMmax + BSmax is established. By configuring the support portion (160, 170, 180), the drive support portion (160, 170, 180) can be reduced in size without impairing the function and reliability of the turbo compressor (101).
- the power supply unit (191) for supplying a current to the drive support unit (160, 170, 180), the case of operating in a surging region, or the drive shaft (130) When the rotary motion is normally stopped, only the current for supporting the radial load of the drive shaft (130) in a non-contact manner is passed through the drive support portion (160, 170, 180) without passing the current that contributes to the drive torque.
- the drive shaft (160, 170, 180) when driving in the surging region or when the rotational motion of the drive shaft (130) is normally stopped (that is, when generation of torque is not required), the drive shaft (160, 170, 180) is driven by the drive shaft ( Only current to support the radial load of 130) is applied. Thereby, in the above case, the turbo compressor (101) can be operated efficiently.
- the drive support portion (160, 170, 180) includes only the bearingless motor (160, 170). To do.
- the radial load of the drive shaft (130) is supported in a non-contact manner only by the bearingless motor (160, 170).
- the drive support portion (160, 170, 180) includes the bearingless motor (160, 170) and the shaft of the drive shaft (130).
- a magnetic bearing (180) that is arranged side by side with the bearingless motor (160, 170) in a direction and has a plurality of electromagnets and supports the radial load of the drive shaft (130) in a non-contact manner.
- the radial load of the drive shaft (130) is supported in a non-contact manner by the bearingless motor (160, 170) and the magnetic bearing (180).
- the magnetic bearing (260) is more than the radial load supported by the bearingless motor (250) in the axial direction of the drive shaft (240). It is arrange
- the radial load supported by the magnetic bearing (260) is larger than the radial load supported by the bearingless motor (250). That is, the magnetic bearing (260) is disposed at a position where the radial load of the drive shaft (240) is relatively large, and the bearingless motor (250) is disposed at a position where the radial load of the drive shaft (240) is relatively small. Is arranged.
- the electromagnetic force is divided into a supporting force (a force for supporting the drive shaft (240) in a non-contact manner) and a driving force (a force for rotating the drive shaft (240)).
- the magnetic bearing (260) it is possible to assign all the electromagnetic force to the support force. Therefore, the magnetic bearing (260) can generate a larger support force than the bearingless motor (250).
- the impeller (220) is connected to one end of the drive shaft (240), and the magnetic bearing (260) is connected to the drive shaft (240). It is arranged at a position closer to the impeller (220) than the bearingless motor (250) in the axial direction.
- the radial of the drive shaft (240) at that position The load tends to increase. Therefore, by arranging the magnetic bearing (260) closer to the impeller (220) than the bearingless motor (250) in the axial direction of the drive shaft (240), the radial load of the drive shaft (240) is relatively reduced.
- the magnetic bearing (260) can be arranged at a large position, and the bearingless motor (250) can be arranged at a position where the radial load of the drive shaft (240) becomes relatively small.
- the eleventh aspect of the present disclosure is characterized in that, in the ninth or tenth aspect, the bearingless motor (250) is a surface magnet type bearingless motor.
- the bearingless motor (250) is a surface magnet type bearingless motor.
- the number of permanent magnets (253) in the surface magnet type bearingless motor (250) is larger than the number of permanent magnets (253) in the concurrent pole type bearingless motor (250). Therefore, the magnetic flux density of the magnetic flux ⁇ 1 is higher in the surface magnet type bearingless motor (250) than in the concurrent pole type bearingless motor (250). Therefore, the surface magnet type bearingless motor (250) can generate a larger driving torque (T1) than the concurrent pole type bearingless motor (250).
- the bearingless motor (450) is more than a radial load supported by the magnetic bearing (460) in the axial direction of the drive shaft (440). It is arrange
- the bearingless motor (450) is disposed at a position where the radial load of the drive shaft (440) becomes relatively large, and the magnetic force is placed at a position where the radial load of the drive shaft (440) becomes relatively small.
- a bearing (460) is disposed. That is, the magnetic bearing (460) is arranged at a position where a radial load smaller than the radial load supported by the bearingless motor (450) acts.
- the electromagnetic force generated in the magnetic bearing (460) depends on the size of the magnetic bearing (460) (especially the shaft length and rotor diameter). The larger the size of the magnetic bearing (460), the larger the magnetic bearing (460). There is a tendency that the electromagnetic force generated in is increased.
- the magnetic bearing (460) by placing the magnetic bearing (460) at a position where a radial load smaller than the radial load supported by the bearingless motor (450) is applied, the radial load supported by the bearingless motor (450) is larger.
- the size (especially the shaft length and rotor diameter) of the magnetic bearing (460) can be made smaller than when the magnetic bearing (460) is disposed at a position where a radial load acts.
- the load torque of the drive shaft (440) (torque required to rotationally drive the drive shaft (440)) is maximum.
- the operating range in which the radial load on the drive shaft (440) is different from the maximum and the operating range in which the radial load on the drive shaft (440) is relatively large (particularly the radial load on the drive shaft (440)).
- the load torque of the drive shaft (440) is relatively small. Therefore, in the operating range where the radial load on the drive shaft (440) is relatively large, the electromagnetic force of the bearingless motor (450) is sufficient for the support force (force for supporting the drive shaft (440) in a non-contact manner). Can be assigned to.
- the impeller (421) is connected to one end of the drive shaft (440), and the bearingless motor (450) includes the drive shaft (440).
- the magnetic bearing (460) is disposed closer to the impeller (421) than the magnetic bearing (460).
- the bearingless motor (450) at a position closer to the impeller (421) than the radial magnetic bearing (460) in the axial direction of the drive shaft (440), an impeller ( In the turbo compressor (410) to which 421) is connected, a bearingless motor (450) is placed at a position where the radial load of the drive shaft (440) is relatively large, and the radial load of the drive shaft (440) is compared.
- the radial magnetic bearing (460) can be arranged at a position where it becomes smaller.
- the bearingless motor (450) is configured by a concurrent pole type bearingless motor or an embedded magnet type bearingless motor. It is characterized by that.
- the concurrent pole type bearingless motor (450) has a lower magnetic resistance in the magnetic path of the supporting magnetic flux BS1 than the surface magnet type bearingless motor (450). Therefore, the concurrent pole type bearingless motor (450) can generate a larger supporting force than the surface magnet type bearingless motor (450).
- the embedded magnet type bearingless motor (450) has a lower magnetic resistance in the magnetic path of the supporting magnetic flux BS1 than the surface magnet type bearingless motor (450). Therefore, the embedded magnet type bearingless motor (450) can generate a larger supporting force than the surface magnet type bearingless motor (450).
- the magnetic bearing (621) is disposed on each side in the axial direction of the bearingless motor (640), and the plurality of electromagnets (671 to 678).
- the drive shaft (605) is configured to apply a composite electromagnetic force (F) to each of the drive shafts (605), and each magnetic bearing (621) generates a composite electromagnetic force (F) having an opposite phase to each other. To do.
- two magnetic bearings (621) are arranged on both sides of the bearingless motor (640) to apply antiphase electromagnetic forces to the drive shaft (605). That is, these magnetic bearings (621) apply an electromagnetic force to the tilt direction of the drive shaft (605). Further, a radial load can be supported by the bearingless motor (640). By doing so, the radial load shared by the magnetic bearing (621) can be reduced, and as a result, the magnetic bearing (621) can be downsized.
- each of the electromagnets (671 to 678) of one magnetic bearing (621) generates an electromagnetic force having a phase opposite to that of the electromagnet (671 to 678). It is connected to the electromagnets (671 to 678) generated in the magnetic bearing (621).
- the two magnetic bearings (621) can be controlled simultaneously.
- the displacement in the translation direction is controlled by the bearingless motor (640), and the displacement in the tilt direction is controlled by the magnetic bearing (621). It is characterized by.
- the eighteenth aspect of the present disclosure is characterized in that, in the seventeenth aspect, the controller for the bearingless motor (640) and the controller for the magnetic bearing (621) are individually provided.
- the magnetic bearing (621) closer to the impeller (603a) is more than the other magnetic bearing (621).
- the number of windings of each electromagnet (671 to 678), the magnitude of the current flowing through each winding, the magnetic resistance of the magnetic circuit, and the size of the electromagnet are set so as to generate a large synthetic electromagnetic force (F). It is characterized by that.
- each of the electromagnets (671 to 678) included in the magnetic bearing (621) closer to the impeller (603a) is replaced with the other magnetic bearing (621
- the number of windings is larger than that of each of the electromagnets (671 to 678).
- the combined electromagnetic force (F) of the magnetic bearing (621) is adjusted by the number of turns of the coil (665).
- the magnetic bearing (621) closer to the impeller (603a) is longer in the axial direction than the other magnetic bearing (621). Is characterized by long.
- the combined electromagnetic force (F) of the magnetic bearing (621) is adjusted by the axial length of the magnetic bearing (621).
- the drive shaft (605) is a portion facing the magnetic bearing (621) closer to the impeller (603a). This is characterized in that the diameter is larger than the part facing the other magnetic bearing (621).
- the combined electromagnetic force (F) of the magnetic bearing (621) is adjusted by the diameter of the portion of the drive shaft (605) facing the magnetic bearing (621).
- the drive support portion (760,770,780,782,784,787) is incorporated in the bearingless motor (760,770) and the drive shaft (730). It is characterized by having a gas bearing (780, 782, 784, 787) that supports the radial load of non-contact.
- the radial load of the drive shaft (730) is supported in a non-contact manner by the bearingless motor (760,770) and the gas bearing (780,782,784,787). For this reason, compared to the case where the radial load of the drive shaft (730) is supported only by the bearingless motor (760,770), the radial load that the bearingless motor (760,770) takes is reduced, and the bearingless corresponding to the decrease. It becomes possible to increase the drive torque output of the motor (760,770).
- the gas bearing (780, 782, 784, 787) is incorporated in the bearingless motor (760, 770), the rotating system can be reduced in size as compared with the case where the gas bearing (780, 782, 784, 787) is provided alone. Therefore, the area where the turbo compressor (701) can be operated safely can be expanded.
- the bearingless motor (760,770) includes a stator (762,772) around which a coil (763,773) through which a current within the predetermined current range flows is wound. And at least a part of the gas bearing (780, 782, 784, 787) overlaps the radial direction of the coil end portion (764, 774) of the stator (762, 772) and the drive shaft (730).
- At least a part of the gas bearing (780,782,784,787) overlaps in the radial direction of the coil end portion (764,774) and the drive shaft (730), whereby the gas bearing (780,782,784,787) and the bearingless motor ( 760, 770) and the drive shaft (730), the overall size of the rotating system can be reduced.
- the gas bearing (780,782,784,787) is configured by a sleeve (780,782,784,787) fitted into a mold resin (765,775) of the coil end portion (764,774). It is characterized by that.
- the twenty-sixth aspect of the present disclosure is characterized in that, in any one of the twenty-third to twenty-fifth aspects, the gas bearing (780, 782) is a dynamic pressure gas bearing.
- a twenty-seventh aspect of the present disclosure is characterized in that, in any one of the twenty-third to twenty-fifth aspects, the gas bearing (784, 787) is a static pressure gas bearing.
- a twenty-eighth aspect of the present disclosure is the armature winding (846a to 846c, provided in the stator (844,854) of the bearingless motor (840,850) according to any one of the first to twenty-seventh aspects. 856a to 856c) and supporting windings (847a to 847c, 857a to 857c), and the above armature windings (846a to 846c, 856a to 856c) and the supporting windings (847a to 847c, 857a to 857c)
- a control unit (860) for controlling the power supply unit (861, 862) so as to increase one of the flowing support current IS and decrease the other.
- the power capacity of the power supply unit (861,862) is increased according to the operating state of the turbo compressor (812).
- the armature voltage VA and the supporting current IS can be adjusted within the range.
- control unit (860) increases the armature voltage VA so that the support current IS decreases, or reduces the support current IS.
- the power supply unit (861, 862) is controlled so that the armature voltage VA is decreased by increasing the voltage.
- the supporting current IS or the armature voltage VA can be reduced while maintaining the radial supporting force.
- control unit (860) increases the armature voltage VA so that the support current IS does not exceed a predetermined first upper limit value.
- the power supply unit (861, 862) is controlled.
- the support current IS can be prevented from exceeding the first upper limit value, while the radial support caused by the armature current IA that is the current flowing through the armature windings (846a to 846c, 856a to 856c).
- the power can be increased. This is particularly effective when the radial support force is increased with the support current IS reaching the first upper limit value or the vicinity thereof.
- control unit (860) increases the support current IS so that the armature voltage VA is a predetermined second value.
- the power supply unit (861, 862) is controlled so as not to exceed the upper limit value.
- the armature voltage VA can be prevented from exceeding the second upper limit value.
- the rotational speed of the bearingless motor (840, 850) is increased, the radial bearing force due to the armature current IA is increased. May decrease.
- the support current IS the reduction can be compensated for by the radial support force resulting therefrom.
- control unit (860) reduces the armature voltage VA and increases the support current IS.
- power supply unit (861, 862) is controlled so that the armature voltage VA is increased by reducing the support current IS.
- the support current IS or the armature voltage VA can be increased while maintaining the radial support force.
- control unit (860) reduces the armature voltage VA so that the support current IS is a predetermined first current.
- the power supply unit (861, 862) is controlled to exceed the lower limit value.
- the support current IS can exceed the first lower limit value.
- heat generated in the support windings (847a to 847c, 857a to 857c) can be used as necessary.
- control unit (860) reduces the support current IS so that the armature voltage VA is a predetermined second lower limit.
- the power supply unit (861, 862) is controlled to exceed the value.
- the armature voltage VA can exceed the second lower limit value.
- heat generated in the armature windings (846a to 846c, 856a to 856c) can be used as necessary.
- the turbo compressor (812) is provided in a refrigerant circuit (811) that performs a refrigeration cycle, and the impeller (821) ),
- the control unit (860) increases the armature voltage VA to increase the armature voltage VA when the turbo compressor (812) is operated in a region where a rotation stall occurs or a surging region.
- the power supply unit (861, 862) is controlled so that the support current IS does not exceed a predetermined first upper limit value.
- the turbo compressor (812) when the turbo compressor (812) is operated in the region (C) or the surging region (D) where the rotation stall occurs, that is, the required radial while the load torque of the bearingless motor (840,850) is small.
- the radial support force due to the armature current IA can be increased. Therefore, even if the support current IS is suppressed to the first upper limit value or less, the radial support force of the bearingless motor (840, 850) can be increased by increasing the armature current IA.
- the thirty-sixth aspect of the present disclosure is directed to the refrigeration apparatus (900).
- the refrigeration apparatus (900) includes a heat source unit (910) having a turbo compressor (101, 210, 410, 601, 701, 812) according to any one of the first to 35th aspects and a utilization unit (921).
- a plurality of the use units (921) are provided, and the plurality of use units (921) perform air conditioning of a plurality of air-conditioning target spaces. It is characterized by that.
- air conditioning of a plurality of air-conditioning target spaces is performed by a plurality of usage units (921).
- a turbo compressor provided with a drive support portion including at least one bearingless motor.
- stator and the rotor of the bearingless motor can be reduced in size as compared with the case where the drive support portion is configured according to a normal concept. .
- the turbo compressor can be efficiently operated when operating in the surging region or when the rotational movement of the drive shaft is normally stopped.
- a magnetic bearing that performs only non-contact support of the drive shaft can be reduced in size.
- the radial magnetic bearing is placed at a position where the radial load of the drive shaft becomes relatively large.
- the bearingless motor By disposing the bearingless motor at a position where the radial load of the drive shaft becomes relatively small, it is possible to secure the support force of the drive shaft (force for supporting the drive shaft in a non-contact manner).
- the turbo compressor in which the impeller is connected to one end of the drive shaft by disposing the magnetic bearing in a position closer to the impeller than the bearingless motor in the axial direction of the drive shaft.
- the magnetic bearing can be arranged at a position where the radial load of the drive shaft becomes relatively large, and the bearingless motor can be arranged at a position where the radial load of the drive shaft becomes relatively small.
- the bearingless motor is constituted by a surface magnet type bearingless motor, so that the bearingless motor is constructed more than the case where the bearingless motor is constituted by a concurrent pole type bearingless motor.
- the driving force force for rotating the drive shaft
- a motor that performs only the rotational drive of the drive shaft instead of the bearingless motor by performing rotational drive and non-contact support of the drive shaft using a bearingless motor and a magnetic bearing.
- the turbo compressor can be made smaller.
- the size of the magnetic bearing (particularly the shaft length and the rotor diameter) is larger than the case where the magnetic bearing is disposed at a position where a radial load larger than the radial load supported by the bearingless motor is applied. ) Can be reduced, and the turbo compressor can be further downsized.
- the electromagnetic force of the bearingless motor is sufficiently sufficient for supporting force (force for supporting the drive shaft in a non-contact manner) in an operation region where the radial load of the drive shaft is relatively large. Since it can be assigned, the drive shaft support force can be ensured in the operation region where the radial load on the drive shaft is relatively large.
- the turbo compressor in which the impeller is connected to one end of the drive shaft by disposing the bearingless motor in a position closer to the impeller than the magnetic bearing in the axial direction of the drive shaft.
- the bearingless motor can be arranged at a position where the radial load on the drive shaft becomes relatively large, and the magnetic bearing can be arranged at a position where the radial load on the drive shaft becomes relatively small.
- the bearingless motor is constituted by a concurrent pole type bearingless motor or an embedded magnet type bearingless motor.
- the support force (force for supporting the drive shaft in a non-contact manner) in the bearingless motor can be increased as compared with the case of the configuration.
- the drive support portion that supports the drive shaft in a non-contact manner, it is possible to reduce displacement of the drive shaft in the tilt direction while suppressing an increase in size of the drive support portion.
- the two magnetic bearings can be easily controlled.
- the eighteenth aspect it is possible to reduce the cost of the controller by using a controller having an optimum calculation speed and output capacity for each of the translation direction control and the tilt direction control.
- the bearingless motor since the magnetic bearing is partially responsible for not only the force for reducing the tilt displacement angle but also the force for reducing the displacement in the translational direction, the bearingless motor is in the translational direction.
- the force to be output in order to reduce the displacement of the bearing can be reduced, and the bearingless motor can be miniaturized.
- the radial load that the bearingless motor takes can be reduced by supporting at least part of the radial load of the drive shaft by the gas bearing. For this reason, it becomes possible to raise the drive torque output of a bearingless motor.
- the axial length of the rotating system including the bearingless motor, the gas bearing, and the drive shaft can be set small. Therefore, the area where the turbo compressor can be operated safely can be expanded.
- the armature voltage VA and the supporting current are within the range of the power supply capacity of the power supply unit (861,862) according to the operation state of the turbo compressor (812).
- the IS can be adjusted.
- the supporting current IS can be prevented from exceeding the first upper limit value, while the armature current IA that is a current flowing through the armature windings (846a to 846c, 856a to 856c) is reduced.
- the resulting radial bearing force can be increased.
- the support current IS is increased when the radial support force due to the armature current IA decreases.
- the reduction can be compensated by the radial support force resulting therefrom.
- heat generation in the support windings (847a to 847c, 857a to 857c) can be utilized as necessary.
- heat generation in the armature windings (846a to 846c, 856a to 856c) can be utilized as necessary.
- the radial support force of the bearingless motor (840,850) can be increased by increasing the armature current IA. .
- the above-described effects can be obtained in the refrigeration apparatus (900).
- FIG. 1 is a front view showing a configuration example of a turbo compressor according to Embodiment 1 of the present invention.
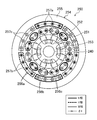
- FIG. 2 is a cross-sectional view showing a configuration example of the first bearingless motor.
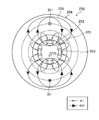
- FIG. 3 is a cross-sectional view of the first bearingless motor, showing the magnetic flux and the driving magnetic flux.
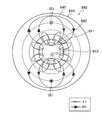
- FIG. 4 is a cross-sectional view of the first bearingless motor, showing the magnetic flux and the supporting magnetic flux.
- FIG. 5 is a cross-sectional view of the first bearingless motor, showing a magnetic flux, a driving magnetic flux, and a supporting magnetic flux.
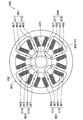
- FIG. 6 is a cross-sectional view showing a configuration example of the second bearingless motor, and shows a magnet magnetic flux, a driving magnetic flux, and a supporting magnetic flux.
- FIG. 1 is a front view showing a configuration example of a turbo compressor according to Embodiment 1 of the present invention.
- FIG. 2 is a cross-sectional view showing a configuration example of the first bearing
- FIG. 7 is a diagram for explaining an operation region of the turbo compressor.
- FIG. 8 is a front view illustrating a configuration example of the turbo compressor according to the second embodiment of the present invention.
- FIG. 9 is a cross-sectional view showing a configuration example of a radial magnetic bearing.
- FIG. 10 is a schematic view illustrating the configuration of an air conditioner according to the third embodiment of the present invention.
- FIG. 11 is a longitudinal sectional view illustrating the configuration of the turbo compressor.
- FIG. 12 is a cross-sectional view illustrating the configuration of a bearingless motor.
- FIG. 13 is a cross-sectional view illustrating a magnet magnetic flux and a driving magnetic flux generated in a bearingless motor.
- FIG. 14 is a cross-sectional view illustrating a magnet magnetic flux and a supporting magnetic flux generated in a bearingless motor.
- FIG. 15 is a cross-sectional view illustrating a magnet magnetic flux, a driving magnetic flux, and a supporting magnetic flux generated in a bearingless motor.
- FIG. 16 is a cross-sectional view illustrating the configuration of a radial magnetic bearing.
- FIG. 17 is a cross-sectional view illustrating the configuration of a modified example of the bearingless motor.
- FIG. 18 is a cross-sectional view illustrating a magnet magnetic flux, a driving magnetic flux, and a supporting magnetic flux generated in a modification of the bearingless motor.
- FIG. 19 is a schematic view illustrating the configuration of an air conditioner according to Embodiment 4 of the present invention.
- FIG. 19 is a schematic view illustrating the configuration of an air conditioner according to Embodiment 4 of the present invention.
- FIG. 20 is a longitudinal sectional view illustrating the configuration of the turbo compressor.
- FIG. 21 is a cross-sectional view illustrating the configuration of a bearingless motor.
- FIG. 22 is a cross-sectional view illustrating a magnet magnetic flux and a driving magnetic flux generated in a bearingless motor.
- FIG. 23 is a cross-sectional view illustrating a magnet magnetic flux and a supporting magnetic flux generated in a bearingless motor.
- FIG. 24 is a cross-sectional view illustrating a magnet magnetic flux, a driving magnetic flux, and a supporting magnetic flux generated in a bearingless motor.
- FIG. 25 is a cross-sectional view illustrating the configuration of a radial magnetic bearing.
- FIG. 26 is a cross-sectional view illustrating Modification 1 of the bearingless motor.
- FIG. 27 is a cross-sectional view illustrating a magnet magnetic flux, a driving magnetic flux, and a supporting magnetic flux generated in Modification 1 of the bearingless motor.
- FIG. 28 is a cross-sectional view illustrating Modification Example 2 of the bearingless motor.
- FIG. 29 is a transverse cross-sectional view illustrating a magnet magnetic flux, a driving magnetic flux, and a supporting magnetic flux generated in Modification 2 of the bearingless motor.
- FIG. 30 shows a configuration example of the turbo compressor according to the fifth embodiment of the present invention.
- FIG. 31 is a cross-sectional view illustrating a configuration example of a bearingless motor.
- FIG. 32 is a cross-sectional view of the bearingless motor, showing the magnetic flux and the driving magnetic flux.
- FIG. 33 is a cross-sectional view of the bearingless motor, showing the magnetic flux and the supporting magnetic flux.
- FIG. 34 is a cross-sectional view of the bearingless motor, showing the magnetic flux, the driving magnetic flux, and the supporting magnetic flux.
- FIG. 35 is a cross-sectional view showing a configuration example of a radial magnetic bearing.
- FIG. 36 is a longitudinal sectional view showing a configuration example of a radial magnetic bearing.
- FIG. 37 shows a state of connection between two radial magnetic bearings.
- FIG. 38 shows the relationship between the tilt displacement angle, the gap detected by each sensor, and the total length.
- FIG. 39 is a front view illustrating a configuration example of the turbo compressor according to the sixth embodiment of the present invention.
- FIG. 39 is a front view illustrating a configuration example of the turbo compressor according to the sixth embodiment of the present invention.
- FIG. 40 is an enlarged view of a portion X in FIG.
- FIG. 41 is a front view illustrating a configuration example of the turbo compressor according to the seventh embodiment of the present invention.
- FIG. 42 is an enlarged view of a portion Y in FIG.
- FIG. 43 is a schematic view illustrating the configuration of the air-conditioning apparatus according to Embodiment 8 of the present invention.
- FIG. 44 is a longitudinal sectional view illustrating the configuration of the turbo compressor.
- FIG. 45 is a cross-sectional view illustrating the configuration of a bearingless motor.
- FIG. 46 is a schematic view illustrating the configuration of the refrigeration apparatus according to Embodiment 9 of the present invention.
- Embodiment 1 of the Invention A first embodiment of the present invention will be described.
- the turbo compressor (101) of this embodiment is provided in a refrigerant circuit (not shown) that performs a refrigeration cycle, and compresses the refrigerant.
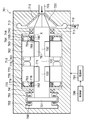
- the turbo compressor (101) includes a casing (110), an impeller (120), a drive shaft (130), a touchdown bearing (140, 141), a thrust magnetic bearing (150), A control unit (190), a power supply unit (191), a first bearingless motor (160), and a second bearingless motor (170) are provided.
- the first bearingless motor (160) and the second bearingless motor (170) are arranged side by side in the axial direction of the drive shaft (130).
- the “axial direction” refers to the rotational axis direction and the axial direction of the drive shaft (130), and the “radial direction” refers to the drive shaft ( 130) is a direction orthogonal to the axial direction.
- the “outer peripheral side” is a side farther from the axis of the drive shaft (130), and the “inner peripheral side” is a side closer to the axis of the drive shaft (130).
- the casing (110) is formed in a cylindrical shape whose both ends are closed, and is arranged so that the cylinder axis is horizontally oriented.
- the space in the casing (110) is partitioned by the wall (111), and the space on the right side of the wall (111) constitutes the impeller chamber (112) that houses the impeller (120), and the wall (111)
- the space on the left side further constitutes an electric motor chamber (114) that houses the first and second bearingless motors (160, 170).
- a drive shaft (130) extending in the axial direction in the casing (110) connects the impeller (120) and the first and second bearingless motors (160, 170).
- the first and second bearingless motors (160, 170) constitute a drive support portion.
- the impeller (120) is formed by a plurality of blades so that the outer shape becomes a substantially conical shape.
- the impeller (120) is housed in the impeller chamber (112) in a state of being fixed to one end of the drive shaft (130).
- a suction pipe (115) and a discharge pipe (116) are connected to the impeller chamber (112), and a compression space (113) is formed on the outer periphery of the impeller chamber (112).
- the suction pipe (115) is provided to guide the refrigerant from the outside into the impeller chamber (112), and the discharge pipe (116) is used to return the high-pressure refrigerant compressed in the impeller chamber (112) to the outside. Is provided.
- the turbo compressor (101) is provided with two touchdown bearings (140, 141).
- One touch-down bearing (140) is provided in the vicinity of one end (right end in FIG. 1) of the drive shaft (130), and the other touch-down bearing (141) is in the vicinity of the other end of the drive shaft (130). Is provided.
- These touchdown bearings (140, 141) support the drive shaft (130) when the first and second bearingless motors (160, 170) are de-energized (ie, when the drive shaft (130) is not floating). Is configured to do.
- the thrust magnetic bearing (150) has first and second electromagnets (151 and 152), and the other end of the drive shaft (130) (that is, the impeller (120) is fixed).
- a disc-shaped portion hereinafter referred to as a disc portion (131)
- the thrust magnetic bearing (150) controls the current flowing through the first and second electromagnets (151,152), thereby opposing the first and second electromagnets (151,152) in the opposing direction (ie, axial direction, left and right in FIG. 1).
- the position of the supported portion (disk portion (131)) of the drive shaft (130) in the direction) can be controlled.
- the control unit (190) is a gap sensor (not shown) that can detect a gap between the disk unit (131) and the thrust magnetic bearing (150) so that the position of the drive shaft (130) becomes a desired position. ), A detection value of a gap sensor (not shown) capable of detecting a gap between the stator (164,174) and the rotor (161,171) in the first and second bearingless motors (160,170), and an impeller (120) and the voltage command value (thrust voltage command value) for controlling the voltage supplied to the thrust magnetic bearing (150) based on the information on the target rotational speed of the drive shaft (130), the first and second A voltage command value (motor voltage command value) for controlling the voltage supplied to the bearingless motor (160, 170) is output.
- the control unit (190) can be configured by a microcomputer (not shown) and a program for operating the microcomputer.
- the power supply unit (191) supplies voltage to the thrust magnetic bearing (150) and the first and second bearingless motors (160, 170) based on the thrust voltage command value and the motor voltage command value from the control unit (190), respectively.
- the power supply unit (191) can be configured by a PWM (Pulse Width Modulation) amplifier.
- the power supply unit (191) constitutes an electric circuit.
- the first bearingless motor (160) is disposed on the side closer to the impeller (120) in the motor chamber (114).
- the first bearingless motor (160) is configured to rotationally drive the drive shaft (130) by electromagnetic force and to support the radial load of the drive shaft (130) in a non-contact manner.
- the first bearingless motor (160) has a pair of rotors (161) and a stator (164).
- the rotor (161) is fixed to the drive shaft (130), and the stator (164) is fixed to the inner peripheral wall of the casing (110).
- FIG. 2 is a cross-sectional view showing a configuration example of the first bearingless motor (160).
- the first bearingless motor (160) is a concurrent pole type bearingless motor.
- the stator (164) of the first bearingless motor (160) includes a back yoke portion (165), a plurality of teeth portions (not shown), driving coils (166a to 166c) wound around the teeth portions, And supporting coils (167a to 167c).
- the rotor (161) of the first bearingless motor (160) includes a core portion (162) and a plurality (four in this example) of permanent magnets (163) embedded in the core portion (162). Have.
- the stator (164) is made of a magnetic material (for example, a laminated steel plate).
- the back yoke portion (165) of the stator (164) is formed in a cylindrical shape.
- the drive coils (166a to 166c) and the support coils (167a to 167c) are wound around each tooth portion by a distributed winding method.
- the driving coils (166a to 166c) and the supporting coils (167a to 167c) may be wound around each tooth portion by a concentrated winding method.
- the driving coils (166a to 166c) are coils wound on the inner peripheral side of the tooth portion.
- the driving coils (166a to 166c) are surrounded by a thin solid line, a U-phase driving coil (166a) surrounded by a thick solid line, a V-phase driving coil (166b) surrounded by a thick broken line in FIG. W-phase driving coil (166c) shown.
- the support coils (167a to 167c) are coils wound around the outer periphery of the tooth portion.
- the supporting coils (167a to 167c) are surrounded by a thin solid line and a U phase supporting coil (167a) surrounded by a thick solid line, a V phase supporting coil (167b) surrounded by a thick broken line in FIG. W-phase supporting coil (167c) shown.
- the core part (162) of the rotor (161) is formed in a cylindrical shape.
- a shaft hole (not shown) for inserting the drive shaft (130) is formed in the central portion of the core portion (162).
- the core part (162) is comprised with the magnetic material (for example, laminated steel plate).
- the magnetic material for example, laminated steel plate.
- four permanent magnets (163) having a shape along the outer peripheral surface are embedded at an angular pitch (AP1) of 90 ° in the circumferential direction of the rotor (161). ing.
- AP1 angular pitch
- These four permanent magnets (163) have the same shape.
- the outer peripheral surface side of each permanent magnet (163) is an N pole, and the outer peripheral surface of the core part (162) between each permanent magnet (163) is a pseudo S pole.
- the outer peripheral surface side of each permanent magnet (163) may be a south pole.
- FIG. 3 shows a magnetic flux ⁇ 1 generated by each permanent magnet (163) in the first bearingless motor (160), and a driving magnetic flux BM1 generated for rotationally driving the impeller (120) and the drive shaft (130). It is shown.
- the first bearingless motor (160) rotates the driving torque T1 (that is, the driving shaft (130) shown in FIG. 3 in the counterclockwise direction in FIG. 3 by the interaction between the magnet magnetic flux ⁇ 1 and the driving magnetic flux BM1. Torque) to be generated.
- a current IM1 equivalent to the current flowing through the driving coils (166a to 166c) is shown.
- FIG. 4 shows a magnetic flux ⁇ 1 generated by each permanent magnet (163) in the first bearingless motor (160), and a supporting magnetic flux BS1 generated to support the radial load of the drive shaft (130) in a non-contact manner. It is shown.
- the first bearingless motor (160) has the supporting force F1 shown in the figure (that is, the force pushing the drive shaft (130) to the right in FIG. 4) by the interaction between the magnet magnetic flux ⁇ 1 and the supporting magnetic flux BS1. Is configured to generate.
- a current IS1 equivalent to the current flowing through the supporting coils (167a to 167c) is shown.
- the magnetic path of the supporting magnetic flux BS1 includes the back yoke portion (165) and the teeth portion of the stator (164), the air gap, and the core portion (162) of the rotor (161). It is a route that passes.
- the magnetic resistance of the back yoke portion (165), the teeth portion, and the core portion (162) is smaller than the magnetic resistance of the permanent magnet (163). Therefore, the first bearingless motor (160) includes the second bearingless motor (170) (that is, the drive shaft) in which the permanent magnet (173) is disposed on substantially the entire outer peripheral surface of the rotor (171) as described later.
- the second bearingless motor (170) which includes a permanent magnet (173) in the magnetic path for generating a magnetic force to support the radial load of (130), supports the radial load of the drive shaft (130)
- the magnetic resistance of the magnetic path for generating the magnetic force is small. Therefore, the first bearingless motor (160) can generate a larger support force for supporting the radial load of the drive shaft (130) than the second bearingless motor (170).
- FIG. 5 shows a magnetic flux ⁇ 1 generated by each permanent magnet (163) in the first bearingless motor (160), and a driving magnetic flux BM1 generated for rotationally driving the impeller (120) and the drive shaft (130).
- the support magnetic flux BS1 generated to support the radial load of the drive shaft (130) in a non-contact manner is shown.
- the first bearingless motor (160) is configured to simultaneously generate the drive torque T1 and the support force F1 shown in the figure by the interaction of the magnet magnetic flux ⁇ 1, the drive magnetic flux BM1, and the support magnetic flux BS1. Yes.
- currents IM1 and IS1 equivalent to the currents flowing through the drive coils (166a to 166c) and the support coils (167a to 167c) are shown.
- the second bearingless motor (170) is disposed on the far side from the impeller (120) in the motor chamber (114).
- the second bearingless motor (170) is configured to rotationally drive the drive shaft (130) by electromagnetic force and to support the radial load of the drive shaft (130) in a non-contact manner.
- the second bearingless motor (170) has a pair of rotors (171) and a stator (174).
- the rotor (171) is fixed to the drive shaft (130), and the stator (174) is fixed to the casing (110).
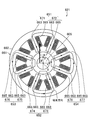
- FIG. 6 is a cross-sectional view showing a configuration example of the second bearingless motor (170).
- the second bearingless motor (170) is an embedded magnet type bearingless motor that exhibits substantially the same behavior as a surface magnet type bearingless motor.
- the configuration of the stator (174) of the second bearingless motor (170) is the same as the configuration of the stator (164) of the first bearingless motor (160).
- the rotor (171) of the second bearingless motor (170) includes a core part (172) and a plurality (eight in this example) of permanent magnets (173) embedded in the core part (172). Have.
- the core part (172) of the rotor (171) is formed in a cylindrical shape.
- a shaft hole (not shown) for inserting the drive shaft (130) is formed in the central portion of the core portion (172).
- the core part (172) is comprised with the magnetic material (for example, laminated steel plate).
- eight permanent magnets (173) having a shape along the outer peripheral surface have an angular pitch (AP2) (ie, AP2) of 45 ° in the circumferential direction of the rotor (171).
- the first bearingless motor (160) is embedded at an angle pitch (half of AP1) of 90 °).
- These eight permanent magnets (173) have the same shape, and the four permanent magnets (163) of the first bearingless motor (160) have the same shape.
- north and south poles appear alternately in the circumferential direction of the rotor (171).
- FIG. 6 shows a magnetic flux ⁇ 2 generated by each permanent magnet (173) in the second bearingless motor (170), and a driving magnetic flux BM2 generated for rotationally driving the impeller (120) and the drive shaft (130).
- a supporting magnetic flux BS2 generated to support the radial load of the drive shaft (130) in a non-contact manner is shown.
- the second bearingless motor (170) causes the drive torque T2 (that is, the drive shaft (130) shown in FIG. 6 to be opposite to that shown in FIG. 6 by the interaction of the magnet magnetic flux ⁇ 2, the drive magnetic flux BM2, and the support magnetic flux BS2.
- a torque that rotates in the clockwise direction) and a supporting force F2 that is, a force that pushes the drive shaft (130) in the right direction in FIG. 6) are generated at the same time.
- the magnetic path of the supporting magnetic flux BS2 includes the back yoke part (175) and the tooth part of the stator (174), the air gap, the permanent magnet (173) and the core of the rotor (171). Part (172).
- the number of permanent magnets (173) in the second bearingless motor (170) is larger than the number of permanent magnets (163) in the first bearingless motor (160).
- the second bearingless motor (170) has a higher magnetic flux density of the magnetic flux generated by the permanent magnet (173) than the first bearingless motor (160) (see FIG. 3). Therefore, the second bearingless motor (170) can generate a larger driving torque T2 for rotationally driving the impeller (120) and the driving shaft (130) than the first bearingless motor (160). it can.
- FIG. 7 is a diagram for explaining an operation region of the turbo compressor (101).
- the horizontal axis represents the refrigerant volume flow rate
- the vertical axis represents the head.
- the turbo compressor (101) has a predetermined current range when a current within a predetermined current range flows to the drive support portion (first and second bearingless motors (160, 170) in the present embodiment) by the power source portion (191). It can be operated in the operating area.
- This predetermined operation region mainly includes a steady operation region (A), a high load torque region (B) and a turbulence region (C) inside the surge line indicated by bold lines in FIG. 7, and surging outside the surge line. Region (D).
- the case where the turbo compressor (101) is operated in the steady operation region (A) and the high load torque region (B) is also referred to as “normal operation”.
- the turbulence region (C) is also referred to as “region in which turning stall occurs”.
- the steady operation region (A) is a region indicated by symbol A in FIG. 7, and rotationally drives the load torque of the impeller (120) and the drive shaft (130) (that is, the impeller (120) and the drive shaft (130)).
- Drive torque T1, T2) is relatively small, and the radial load of the drive shaft (130) is also relatively small.
- the high load torque region (B) is a region indicated by symbol B in FIG. 7, and the load torque of the impeller (120) and the drive shaft (130) is relatively large, and the radial load of the drive shaft (130) is also compared. Large area.
- the load torque of the impeller (120) and the drive shaft (130) in the turbo compressor (101) is maximum at the upper right point in FIG. 7 in the high load torque region (B).
- the driving magnetic flux BM that is, the driving magnetic flux BM1 of the first bearingless motor (160) and the second bearingless motor.
- the value of (170) with the driving magnetic flux BM2) is the maximum value BMmax.
- This BMmax is a magnetic flux generated in the drive support portion in order to generate a drive torque corresponding to the maximum torque load in the predetermined operation region.
- the maximum torque current IBMmax flows in total in the driving coils (166a to 166c, 176a to 176c) of the first and second bearingless motors (160, 170). .
- the load torque of the impeller (120) and the drive shaft (130) and the radial load of the drive shaft (130) in the turbo compressor (101) are the upper right in FIG. 7 in the high load torque region (B). (In particular, the load torque becomes maximum).
- the turbo compressor (101) is operated at the upper right point in FIG. 7 in the high load torque region (B)
- the driving magnetic flux BM and the supporting magnetic flux BS that is, the first bearingless
- the sum of the support magnetic flux BS1 of the motor (160) and the support magnetic flux BS2 of the second bearingless motor (170) is the maximum value (BM + BS) max.
- the turbulence region (C) is a region denoted by reference numeral C in FIG. 7, and the load torque of the impeller (120) and the drive shaft (130) is relatively small, while the radial load of the drive shaft (130) is relatively large. It is an area.
- a turning stall can occur as described above.
- the turning stall is a phenomenon that occurs, for example, when the turbo compressor (101) is operated with the refrigeration load lowered while the condensation temperature (that is, the outside air temperature) is relatively high. Such operation is typically performed in a building having a large number of rooms, such as a building, where air conditioning of only some rooms is required.
- the surging region (D) is a region indicated by a symbol D in FIG. 7, and the turbo compressor (101) may be temporarily operated in the surging region (D) in an emergency such as a power failure. .
- the surging region (D) is a region where the load torque of the impeller (120) and the drive shaft (130) is relatively small, while the radial load of the drive shaft (130) is relatively large.
- the radial load of the drive shaft (130) in the turbo compressor (101) is maximized at a predetermined point in the surging region (D).
- This BSmax is a magnetic flux generated in the drive support portion to support the maximum radial load of the drive shaft (130) in the predetermined operation region in a non-contact manner.
- the maximum supporting force current IBSmax is added to the supporting coils (167a to 167c, 177a to 177c) of the first and second bearingless motors (160, 170) in total. Flowing.
- the second bearingless motor (160, 170) is configured.
- the current corresponding to the upper limit value of the predetermined current range flows through the first and second bearingless motors (160, 170) in total, whereby the first and second bearingless motors (160, 170).
- the first and second bearingless motors (160, 170) are configured such that the magnetic flux Bmax generated in is equal to or greater than (BM + BS) max and less than BMmax + BSmax ((BM + BS) max ⁇ Bmax ⁇ BMmax + BSmax).
- the outer diameter of the stator (164,174), the circumferential width of the teeth and the outer diameter of the rotor (161,171), and the stator (164,174) and the rotor are compared with the configuration according to the normal concept.
- the first and second bearingless motors (160, 170) are configured such that the axial length of (161, 171) is reduced. That is, in the configuration of the present embodiment, the stator (164,174) and the rotor (161,171) which are parts constituting the magnetic path in the first and second bearingless motors (160,170) are compared with the configuration according to the normal concept. ) Can be reduced in size.
- the controller (190) compares the driving magnetic flux BM (that is, the first and Driving coils (166a to 166c, 176a to 176c) of the first and second bearingless motors (160, 170) for generating the driving magnetic flux sum BM1 + BM2 generated in the second bearingless motor (160, 170) )
- BM the driving magnetic flux
- BM2 the driving magnetic flux sum
- BM2 the driving magnetic flux sum
- BM2 generated in the second bearingless motor (160, 170)
- the motor command value is transmitted to the power supply unit (191) so as to increase the ratio of the total IS1 + IS2).
- the power supply unit (191) is configured to drive the driving coils (166a to 166c, 176a to 176c) in the first and second bearingless motors (160, 170) based on the motor command value transmitted from the control unit (190).
- a voltage is supplied to the first and second bearingless motors (160, 170) so as to increase the ratio of the current IS flowing in the supporting coils (167a to 167c, 177a to 177c) with respect to the current IM flowing in the motor.
- control unit (190) performs the same rotation as the refrigerant volume flow rate decreases when the turbo compressor (101) is operated in the region where the rotation stall occurs (that is, the turbulence region (C)) and the surging region (D).
- the control unit (190) performs the same rotation as the refrigerant volume flow rate decreases when the turbo compressor (101) is operated in the region where the rotation stall occurs (that is, the turbulence region (C)) and the surging region (D).
- the support magnetic flux BS for the current IM for generating the drive magnetic flux BM that is, the sum BM1 + BM2 of the drive magnetic flux generated in the first and second bearingless motors (160, 170)
- a motor command value is transmitted to the power supply unit (191) so as to increase the ratio of the current IS.
- the power supply unit (191) is configured to drive the driving coils (166a to 166c, 176a to 176c) in the first and second bearingless motors (160, 170) based on the motor command value transmitted from the control unit (190).
- a voltage is supplied to the first and second bearingless motors (160, 170) so as to increase the ratio of the current IS flowing in the supporting coils (167a to 167c, 177a to 177c) with respect to the current IM flowing in the motor.
- the control unit (190) also controls the first and second bearingless motors (when the turbo compressor (101) is operated in the surging region (D) or when the rotational movement of the drive shaft (130) is normally stopped. 160,170) without passing the current IM through the driving coils (166a to 166c, 176a to 176c), and the current IS to the supporting coils (167a to 167c, 177a to 177c) of the first and second bearingless motors (160,170).
- the motor command value is transmitted to the power supply unit (191) so as to flow.
- the power supply unit (191) based on the motor command value transmitted from the control unit (190), supports coils (167a to 167c, 177a to 177c) of the first and second bearingless motors (160, 170). A voltage is supplied to the first and second bearingless motors (160, 170) so that a current IS flows through the first and second bearingless motors.
- the first and second bearingless motors (160, 170) are configured in accordance with a normal concept in applying the first and second bearingless motors (160, 170) to the turbo compressor (101).
- the first and second bearingless motors (160, 170) can be reduced in size. Therefore, it is possible to reduce the size of the turbo compressor (101) as a whole and to reduce the cost of the turbo compressor (101).
- the radial load of the drive shaft (130) is supported only by the first and second bearingless motors (160, 170), it is used in a conventional turbo compressor (see, for example, Patent Document 1). Further, the two radial magnetic bearings can be omitted, and the rotating system including the impeller (120) and the drive shaft (130) can be reduced in size. Therefore, the resonance frequency of the rotating system becomes higher than that of the conventional system, and thereby the operating range in which the turbo compressor (101) can be operated safely can be expanded.
- the drive magnetic flux corresponds to the radial load of the drive shaft (130) becoming larger than that in the normal operation.
- the ratio of the current IS for generating the supporting magnetic flux BS to the current IM for generating BM is increased as compared with that during normal operation.
- the turbo compressor (101) when the turbo compressor (101) is operated in the turbulence region (C) and the surging region (D), as the refrigerant volume flow rate decreases, the refrigerant volume flow rate decreases as compared with the same rotational speed. Accordingly, the ratio of the current IS for generating the supporting magnetic flux BS to the current IM for generating the driving magnetic flux BM is increased in response to the increase in the radial load of the driving shaft (130). As a result, the turbo compressor (101) can be operated without problems even in the turbulence region (C) and the surging region (D).
- Embodiment 1- A modification of the first embodiment will be described. In this modification, the current corresponding to the upper limit value of the predetermined current range is different from that in the first embodiment.
- the current corresponding to the upper limit value of the predetermined current range is a current obtained by adding the maximum torque current IBMmax and the maximum support force current IBSmax.
- the maximum torque current IBMmax and the maximum support force current are applied to the coils (166a to 166c, 167a to 167c, 176a to 176c, 177a to 177c) of the first and second bearingless motors (160, 170) in total.
- the first and second bearingless motors (160,170) such that the magnetic flux BMSmax generated in the first and second bearingless motors (160,170) by flowing a current obtained by adding IBSmax is less than BMmax + BSmax (BMSmax ⁇ BMmax + BSmax). ).
- the first and second bearingless motors (160, 170) are configured so that the axial lengths of the stator (164, 174) and the rotor (161, 171) are reduced. That is, even in the configuration of the present modification, the stator (164,174) and the rotor (161,171), which are parts constituting the magnetic path in the first and second bearingless motors (160,170), as compared with the configuration according to the normal concept. ) Can be reduced in size.
- Embodiment 2 of the Invention A second embodiment of the present invention will be described.
- the turbo compressor (101) of the present embodiment is different from that of the first embodiment in the configuration of the drive support section.
- differences from the first embodiment will be mainly described.
- the turbo compressor (101) of this embodiment is not a first and second bearingless motor (160, 170), but one radial magnetic bearing (180) and one bearingless motor (170). ).
- the radial magnetic bearing (180) and the bearingless motor (170) constitute a drive support portion.
- the radial magnetic bearing (180) is disposed on the side closer to the impeller (120) in the motor chamber (114), and the bearingless motor (170) is disposed on the side farther from the impeller (120) in the motor chamber (114).
- the configuration of the bearingless motor (170) is the same as the configuration of the second bearingless motor (170) of the first embodiment, for example.
- a radial magnetic bearing (180) is disposed on the side of the motor chamber (114) closer to the impeller (120), and a bearingless motor (170) is disposed on the side of the motor chamber (114) far from the impeller (120). May be.
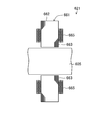
- FIG. 9 is a cross-sectional view showing a configuration example of the radial magnetic bearing (180).
- the radial magnetic bearing (180) constitutes a heteropolar radial magnetic bearing.
- the radial magnetic bearing (180) includes a stator (181) having a back yoke portion (182) and a plurality of teeth portions (183), and a plurality of coils (184) wound around the teeth portions (183). .
- the radial magnetic bearing (180) is configured to support the radial load of the drive shaft (130) in a non-contact manner by an electromagnetic force generated when a current flows through each coil (184) by the power supply unit (191).
- the direction of the current flowing through each coil (184) is set so that the supporting magnetic flux BS1 is generated in the direction shown in FIG.
- the radial magnetic bearing (180) is fixed to the inner peripheral wall of the casing (110).
- the driving magnetic flux BM which is the magnetic flux generated in the bearingless motor (170) and the radial magnetic bearing (180) for rotationally driving the impeller (120) and the drive shaft (130), is generated by the bearingless motor (170).
- Driving magnetic flux BM2 is generated by the bearingless motor (170).
- the support magnetic flux BS which is a magnetic flux generated in the bearingless motor (170) and the radial magnetic bearing (180) to support the radial load of the drive shaft (130), is the support magnetic flux BS1 of the radial magnetic bearing (180). (See FIG. 9) and the magnetic flux BS2 for supporting the bearingless motor (170).
- Embodiment 3 of the Invention >> Embodiment 3 of the present invention will be described.
- FIG. 10 illustrates the configuration of the air conditioner (300) according to the embodiment.
- the air conditioner (300) includes a refrigerant circuit (310).
- the refrigerant circuit (310) includes a turbo compressor (210), a condenser (320), an expansion valve (330), and an evaporator (340), and is configured to perform a refrigeration cycle by circulating the refrigerant.
- the condenser (320) and the evaporator (340) are configured by a cross fin type heat exchanger
- the expansion valve (330) is configured by an electric valve.
- FIG. 11 illustrates the configuration of the turbo compressor (210) shown in FIG.
- the turbo compressor (210) is provided in the refrigerant circuit (310) and is configured to compress the refrigerant.
- the turbo compressor (210) includes a casing (211), an impeller (221), and an electric motor system (230).
- the electric motor system (230) includes a drive shaft (240), a bearingless motor (250), a radial magnetic bearing (260), a control unit (280), and a power supply unit (281).
- the electric motor system (230) further includes a first touchdown bearing (231), a second touchdown bearing (232), and a thrust magnetic bearing (233).
- axial direction refers to the direction of the rotational axis and the direction of the axis of the drive shaft (240)
- radial direction refers to the drive shaft (240). It is a direction orthogonal to the axial direction.
- the “outer peripheral side” is a side farther from the axis of the drive shaft (240)
- the “inner peripheral side” is a side closer to the axis of the drive shaft (240).
- the casing (211) is formed in a cylindrical shape whose both ends are closed, and is arranged so that the cylindrical axis is horizontally oriented.
- the space in the casing (211) is partitioned by the wall (211a), and the space on the right side of the wall (211a) constitutes the impeller chamber (S201) that houses the impeller (221), and the wall (211a)
- the space on the left side of the motor chamber (S202) accommodates the bearingless motor (250).
- the motor chamber (S202) houses a bearingless motor (250), a radial magnetic bearing (260), a first touchdown bearing (231), a second touchdown bearing (232), and a thrust magnetic bearing (233). These are fixed to the inner peripheral wall of the electric motor chamber (S202).
- the drive shaft (240) is provided for rotationally driving the load (220) (in this example, the impeller (221)).
- the drive shaft (240) extends in the casing (211) in the axial direction to connect the impeller (221) and the bearingless motor (250).
- the impeller (221) is fixed to one end of the drive shaft (240), and the bearingless motor (250) is disposed in the middle of the drive shaft (240).
- the other end of the drive shaft (240) (that is, the end opposite to the one end to which the impeller (221) is fixed) is a disc-shaped portion (hereinafter referred to as “disc portion (241)”).
- the disk part (241) is comprised with the magnetic material (for example, iron).
- the impeller (221) is formed with a plurality of blades so that the outer shape is substantially conical, and is housed in the impeller chamber (S201) in a state of being fixed to one end of the drive shaft (240).
- a suction pipe (P201) and a discharge pipe (P202) are connected to the impeller chamber (S201).
- the suction pipe (P201) is provided to guide the refrigerant (fluid) from the outside to the impeller chamber (S201).
- the discharge pipe (P202) is provided to return the high-pressure refrigerant (fluid) compressed in the impeller chamber (S201) to the outside. That is, in this example, the impeller (221) and the impeller chamber (S201) constitute a compression mechanism.
- the bearingless motor (250) has a pair of rotors (251) and a stator (254), rotationally drives the drive shaft (240), and supports the radial load of the drive shaft (240) in a non-contact manner. It is configured as follows.
- the rotor (251) is fixed to the drive shaft (240), and the stator (254) is fixed to the inner peripheral wall of the casing (211).
- the bearingless motor (250) is constituted by a concurrent pole type bearingless motor.
- the rotor (251) of the bearingless motor (250) has a rotor core (252) and a plurality (four in this example) of permanent magnets (253) embedded in the rotor core (252). ing.
- the rotor core (252) is made of a magnetic material (for example, a laminated steel plate) and is formed in a cylindrical shape.
- a shaft hole for inserting the drive shaft (240) is formed in the central portion of the rotor core (252).
- the plurality of permanent magnets (253) are arranged at a predetermined angular pitch in the circumferential direction of the rotor (251).
- four permanent magnets (253) are arranged at an angular pitch of 90 ° in the circumferential direction of the rotor (251).
- the permanent magnet (253) is embedded in the vicinity (outer peripheral portion) of the outer peripheral surface of the rotor core (252) and formed in a shape (arc shape) along the outer peripheral surface of the rotor core (252).
- the four permanent magnets (253) have the same shape.
- the outer peripheral surface side of the four permanent magnets (253) is an N pole, and between the four permanent magnets (253) in the circumferential direction of the rotor (251) in the outer peripheral surface of the rotor core (252).
- the position is pseudo S pole.
- the outer peripheral surface side of the four permanent magnets (253) may be an S pole. In this case, a portion of the outer peripheral surface of the rotor core (252) located between the four permanent magnets (253) in the circumferential direction of the rotor (251) becomes a pseudo N pole.
- the stator (254) of the bearingless motor (250) is made of a magnetic material (for example, laminated steel plate), and is wound around the back yoke portion (255), a plurality of teeth portions (not shown), and the teeth portions.
- the back yoke portion (255) is formed in a cylindrical shape.
- the drive coils (256a, 256b, 256c) and the support coils (257a, 257b, 257c) are wound around each tooth portion in a distributed winding manner.
- the drive coils (256a, 256b, 256c) and the support coils (257a, 257b, 257c) may be wound around each tooth portion by a concentrated winding method.
- the driving coils (256a, 256b, 256c) are coils wound on the inner peripheral side of the tooth portion.
- the driving coils (256a, 256b, 256c) include a U-phase driving coil (256a) surrounded by a thick solid line in FIG. 12, and a V-phase driving coil (256b) surrounded by a thick broken line in FIG. And a W-phase driving coil (256c) surrounded by a thin solid line in FIG.
- the supporting coils (257a, 257b, 257c) are coils wound around the outer periphery of the tooth portion.
- the supporting coil (257a, 257b, 257c) includes a U-phase supporting coil (257a) surrounded by a thick solid line in FIG. 12, and a V-phase supporting coil (257b) surrounded by a thick broken line in FIG. And a W-phase support coil (257c) shown surrounded by a thin solid line in FIG.
- FIG. 13 shows a magnet magnetic flux (magnet magnetic flux ⁇ 1 generated by the permanent magnet (253)) generated in the bearingless motor (250) and a driving magnetic flux (driving magnetic flux BM1 generated to rotationally drive the driving shaft (240)).
- the driving magnetic flux BM1 is a magnetic flux generated according to the current flowing through the driving coils (256a, 256b, 256c).
- the bearingless motor (250) rotates the drive shaft (240) by rotating the drive shaft (240) counterclockwise by the interaction between the magnet magnetic flux ⁇ 1 and the drive magnetic flux BM1.
- Drive torque (T1)) is generated for rotation.
- FIG. 13 shows a current IM1 equivalent to the current flowing through the driving coils (256a, 256b, 256c).
- FIG. 14 illustrates the magnetic flux ⁇ 1 generated in the bearingless motor (250) and the supporting magnetic flux (the supporting magnetic flux BS1 generated to support the radial load of the drive shaft (240) in a non-contact manner).
- the support magnetic flux BS1 is a magnetic flux generated according to the current flowing through the support coils (257a, 257b, 257c).
- the bearingless motor (250) supports the radial load of the drive shaft (240) in a non-contact manner by the interaction between the magnet magnetic flux ⁇ 1 and the support magnetic flux BS1 (in FIG. 14, the drive shaft (240)). Is configured to generate a supporting force (F1) acting in the right direction.
- FIG. 14 shows a current IS1 equivalent to the current flowing through the supporting coils (257a, 257b, 257c).
- FIG. 15 illustrates the magnetic flux ⁇ 1, the driving magnetic flux BM1, and the supporting magnetic flux BS1 generated in the bearingless motor (250).
- the bearingless motor (250) is configured to generate the driving torque (T1) and the supporting force (F1) simultaneously by the interaction of the magnet magnetic flux ⁇ 1, the driving magnetic flux BM1, and the supporting magnetic flux BS1.
- FIG. 15 shows a current IM1 equivalent to the current flowing through the driving coils (256a, 256b, 256c) and a current IS1 equivalent to the current flowing through the supporting coils (257a, 257b, 257c). .
- the radial magnetic bearing (260) has a plurality of electromagnets (first to fourth electromagnets (261 to 264 in this example)) and is configured to support the radial load of the drive shaft (240) in a non-contact manner. Yes.
- the radial magnetic bearing (260) constitutes a heteropolar radial magnetic bearing.
- the first and second electromagnets (261, 262) face each other across the drive shaft (240), and support the drive shaft (240) in a non-contact manner by the combined electromagnetic force of the first and second electromagnets (261, 262).
- the third and fourth electromagnets (263, 264) face each other across the drive shaft (240), and support the drive shaft (240) in a non-contact manner by the combined electromagnetic force of the third and fourth electromagnets (263, 264).
- the opposing direction of the third and fourth electromagnets (263, 264) (in the direction of descending right shoulder in FIG. 16) is orthogonal to the opposing direction of the first and second electromagnets (261, 262) in the plan view (in the upward direction of right shoulder in FIG. 16). ing.
- the radial magnetic bearing (260) includes a magnetic bearing core (265) and a plurality (eight in this example) of coils (268).
- the magnetic bearing core (265) is configured by laminating a plurality of electromagnetic steel plates, and includes a back yoke (266) and a plurality (eight in this example) of teeth (267).
- the back yoke (266) is formed in a cylindrical shape.
- the eight teeth (267) are arranged in the circumferential direction at predetermined intervals (45 ° intervals in this example) along the inner peripheral surface of the back yoke (266), and each of them is from the inner peripheral surface of the back yoke (266). Projecting toward the inside in the radial direction, each inner peripheral surface (protruding end surface) faces the outer peripheral surface of the drive shaft (240) with a predetermined gap therebetween.
- the eight coils (268) are respectively wound around eight teeth (267) of the magnetic bearing core (265).
- eight electromagnet portions first to eighth electromagnet portions (271 to 278)
- the first electromagnet portion (271), the second electromagnet portion (272), the seventh electromagnet portion (277), the eighth electromagnet portion (278), and the third electromagnet portion ( 273), the fourth electromagnet part (274), the fifth electromagnet part (275), and the sixth electromagnet part (276) are arranged in order.
- the first and second electromagnet portions (271 and 272) are configured such that the respective coils (268) are connected in series to form a first electromagnet (261).
- the coils (268) are connected in series to form a second electromagnet (262).
- the current flowing in the coil of the first electromagnet (261) that is, the coil (268) of the first and second electromagnet portions (271 and 272)
- the coil of the second electromagnet (262) that is, the third and fourth electromagnet portions ( 273, 274) by controlling the current flowing in the coil (268)
- the combined electromagnetic force of the first and second electromagnets (261,262) is controlled to oppose the opposing direction (ie, diameter) of the first and second electromagnets (261,262).
- the position of the drive shaft (240) in the direction, that is, the upward direction in FIG. 16 can be controlled.
- the coils (268) are connected in series to form a third electromagnet (263).
- the coils (268) are connected in series to form a fourth electromagnet (264).
- the current flowing through the coil of the third electromagnet (263) (ie, the coil (268) of the fifth and sixth electromagnet portions (275, 276)) and the coil of the fourth electromagnet (264) (ie, the seventh and eighth electromagnet portions ( 278), the combined electromagnetic force of the third and fourth electromagnets (263, 264) is controlled to control the opposing direction of the third and fourth electromagnets (263,264) (that is, the first
- the position of the drive shaft (240) in the radial direction orthogonal to the opposing direction of the first and second electromagnets (261, 262) (in the direction of descending right shoulder in FIG. 16) can be controlled.
- the winding direction of the coil (268) and the direction of the current flowing through the coil (268) act in the direction in which the first to fourth electromagnets (261 to 264) are attracted (that is, the drive shaft (240) is attracted). Electromagnetic force to be generated). Specifically, the winding direction of the coil (268) and the direction of the current flowing through the coil (268) are set so that magnetic flux is generated in the direction of the arrow shown in FIG.
- the first touchdown bearing (231) is provided near one end (right end in FIG. 11) of the drive shaft (240), and the second touchdown bearing (232) is the other end of the drive shaft (240). It is provided in the vicinity of (the left end in FIG. 11).
- the first and second touchdown bearings (231, 232) are provided on the drive shaft (when the drive shaft (240) is not lifted) when the bearingless motor (250) and the radial magnetic bearing (260) are de-energized.
- 240) is configured to support.
- the thrust magnetic bearing (233) has first and second thrust electromagnets (233a, 233b) and is configured to support the disk portion (241) of the drive shaft (240) in a non-contact manner by electromagnetic force. .
- each of the first and second thrust electromagnets (233a, 233b) is formed in an annular shape, and is opposed to each other with the disk portion (241) of the drive shaft (240) interposed therebetween.
- the disk portion (241) of the drive shaft (240) is supported in a non-contact manner by the combined electromagnetic force of the thrust electromagnets (233a, 233b).
- the combined electromagnetic force of the first and second thrust electromagnets (233a, 233b) is controlled to control the first and second thrust electromagnets. It is possible to control the position of the drive shaft (240) in the opposing direction of (233a, 233b) (that is, the axial direction, the left-right direction in FIG. 11).
- Each part of the electric motor system (230) is provided with various sensors (not shown) such as a position sensor, a current sensor, and a rotation speed sensor.
- the bearingless motor (250) is provided with a position sensor (not shown) that outputs a detection signal corresponding to the position of the rotor (251) in the radial direction (radial direction)
- the radial magnetic bearing (260) Is provided with a position sensor (not shown) that outputs a detection signal corresponding to the position of the drive shaft (240) in the radial direction
- the thrust magnetic bearing (233) has a thrust direction
- a position sensor (not shown) that outputs a detection signal corresponding to the position in the axial direction) is provided.
- These position sensors are constituted by, for example, an eddy current displacement sensor that detects a gap (distance) between the position sensor and an object to be measured.
- the control unit (280) controls each part of the electric motor system (230) so that the rotation speed of the drive shaft (240) becomes a predetermined target rotation speed while the drive shaft (240) is supported without contact.
- the motor voltage command value is a command value for controlling the voltage supplied to the coil (not shown) of the stator (254) of the bearingless motor (250).
- the radial voltage command value is a command value for controlling the voltage supplied to the coils (268) of the first to fourth electromagnets (261 to 264) of the radial magnetic bearing (260).
- the thrust voltage command value is a command value for controlling the voltage supplied to the coils (not shown) of the first and second thrust electromagnets (233a, 233b) of the thrust magnetic bearing (233).
- the control unit (280) includes, for example, an arithmetic processing unit such as a CPU, a storage unit such as a memory that stores programs and information for operating the arithmetic processing unit, and the like.
- the power supply unit (281) Based on the motor voltage command value, the radial voltage command value, and the thrust voltage command value output from the control unit (280), the power supply unit (281) generates a coil of the stator (254) of the bearingless motor (250) ( Specifically, the drive coils (256a, 256b, 256c), the support coils (257a, 257b, 257c)), and the coils (268) of the first to fourth electromagnets (261-264) of the radial magnetic bearing (260) And a voltage is supplied to the coils (not shown) of the first and second thrust electromagnets (233a, 233b) of the thrust magnetic bearing (233).
- the power supply unit (281) is configured by, for example, a PWM (Pulse Width Modulation) amplifier.
- the magnetic flux (specifically, the driving magnetic flux BM1 and the supporting magnetic flux BS1) generated in the bearingless motor (250) can be controlled by controlling the current flowing through the coil of the stator (254). Further, by controlling the voltage supplied to the coils (268) of the first to fourth electromagnets (261 to 264) of the radial magnetic bearing (260), the coils of the first to fourth electromagnets (261 to 264) ( 268) can be controlled to control the resultant electromagnetic force of the first to fourth electromagnets (261 to 264).
- the first and second thrust electromagnets (233a, 233b) of the thrust magnetic bearing (233), the first and second thrust electromagnets ( The combined electromagnetic force of the first and second thrust electromagnets (233a, 233b) can be controlled by controlling the current flowing through the coils 233a, 233b).
- the radial magnetic bearing (260) is arranged at a position where a radial load larger than the radial load supported by the bearingless motor (250) acts in the axial direction of the drive shaft (240).
- a load (220) in this example, an impeller (221)
- the radial magnetic bearing (260) is arranged at a position closer to the load (220) than the bearingless motor (250) in the axial direction of the drive shaft (240) (in this example, a position closer to the impeller (221)).
- the radial magnetic bearing (260) As the position of the drive shaft (240) in the axial direction approaches the one end of the drive shaft (240) (that is, the load (220)), the radial load of the drive shaft (240) at that position tends to increase. It is in. Therefore, by arranging the radial magnetic bearing (260) closer to the load (220) than the bearingless motor (250) in the axial direction of the drive shaft (240), a load ( 220), the radial magnetic bearing (260) is disposed at a position where the radial load of the drive shaft (240) becomes relatively large, and the radial load of the drive shaft (240) is relatively small.
- the bearingless motor (250) can be arranged at a position where it becomes smaller.
- the drive shaft (240) is rotationally driven and non-contact supported using the bearingless motor (250) and the radial magnetic bearing (260).
- a motor system (230) is provided rather than a motor that only rotates the drive shaft (240) and a magnetic bearing that only supports non-contact support of the drive shaft (240). ) Can be reduced in size. Specifically, the drive shaft (240) can be shortened.
- the radial load supported by the radial magnetic bearing (260) is larger than the radial load supported by the bearingless motor (250). That is, the radial magnetic bearing (260) is disposed at a position where the radial load of the drive shaft (240) is relatively large, and the bearingless motor (250) is disposed at a position where the radial load of the drive shaft (240) is relatively small. Is arranged.
- the electromagnetic force is divided into a supporting force (a force for supporting the drive shaft (240) in a non-contact manner) and a driving force (a force for rotating the drive shaft (240)).
- a supporting force a force for supporting the drive shaft (240) in a non-contact manner
- a driving force a force for rotating the drive shaft (240)
- all the electromagnetic force can be allocated to the support force. Therefore, the radial magnetic bearing (260) can generate a larger support force than the bearingless motor (250).
- the radial magnetic bearing (260) is disposed at a position where the radial load of the drive shaft (240) is relatively large, and the bearingless motor (250) is disposed at a position where the radial load of the drive shaft (240) is relatively small. It is possible to secure the supporting force of the drive shaft (240) (force for supporting the drive shaft (240) in a non-contact manner).
- the turbo compressor (210) can be reduced in size.
- the rotational frequency of the rotating system including the load (220) (the impeller (221) in this example) and the drive shaft (240) tends to increase as the axial length decreases. is there. Therefore, the resonance frequency of the rotating system including the load (220) and the drive shaft (240) can be increased by shortening the drive shaft (240). Thereby, the safe driving
- the bearingless motor (250) may be constituted by a surface magnet type bearingless motor.
- the rotor (251) includes a rotor core (252) and a plurality of (in this example) provided on the outer peripheral surface of the rotor core (252).
- the plurality of permanent magnets (253) are arranged at a predetermined angular pitch in the circumferential direction of the rotor (251).
- the permanent magnet (253) are arranged at an angular pitch of 45 ° in the circumferential direction of the rotor (251).
- the permanent magnet (253) is formed in a shape (arc shape) along the outer peripheral surface of the rotor core (252).
- the eight permanent magnets (253) have the same shape.
- the eight permanent magnets (253) each have a magnetic pole surface (S pole surface / N pole surface) whose outer peripheral surface and inner peripheral surface are different from each other in the circumferential direction of the rotor (251) (S pole / N pole). Are arranged alternately.
- the protection member (258) is formed in a cylindrical shape and is provided on the outer periphery of the plurality of permanent magnets (253).
- FIG. 18 illustrates the magnetic flux ⁇ 1, the driving flux BM1, and the supporting flux BS1 generated in the surface magnet type bearingless motor (250) shown in FIG.
- the surface magnet type bearingless motor (250) shown in FIGS. 17 and 18 has the magnet magnetic flux ⁇ 1 and the driving magnetic flux BM1.
- the driving torque (T1) and the supporting force (F1) are generated simultaneously by the interaction between the magnetic flux and the supporting magnetic flux BS1.
- the number of permanent magnets (253) (eight in this example) in the surface magnet type bearingless motor (250) is equal to the concurrent pole type bearing shown in FIG. This is larger than the number of permanent magnets (253) in the less motor (250) (four in the example of FIG. 12). Therefore, the magnetic flux density of the magnetic flux ⁇ 1 is higher in the surface magnet type bearingless motor (250) than in the concurrent pole type bearingless motor (250). Therefore, the surface magnet type bearingless motor (250) can generate a larger driving torque (T1) than the concurrent pole type bearingless motor (250).
- the surface magnet type bearingless motor (250) shown in FIG. 17 is more circumferential in the rotor (251) than the concurrent pole type bearingless motor (250) shown in FIG.
- the interval between the plurality of permanent magnets (253) in FIG. Specifically, in the concurrent pole type bearingless motor (250) shown in FIG. 12, the interval between the plurality of permanent magnets (253) in the circumferential direction of the rotor (251) is the circumferential direction of the permanent magnet (253).
- the interval between the plurality of permanent magnets (253) in the circumferential direction of the rotor (251) is equal to the length of the permanent magnet (253).
- a plurality of permanent magnets (253) cover substantially the entire circumference of the rotor core (252).
- the bearingless motor (250) is constituted by a surface magnet type bearingless motor, so that the bearingless motor (250) is constituted more than the case where the bearingless motor (250) is constituted by a concurrent pole type bearingless motor.
- the driving force at (250) (the force for rotating the driving shaft (240)) can be increased.
- Embodiment 4 of the Invention >> Embodiment 4 of the present invention will be described.
- FIG. 19 illustrates the configuration of the air conditioner (500) according to the embodiment.
- the air conditioner (500) includes a refrigerant circuit (510).
- the refrigerant circuit (510) includes a turbo compressor (410), a condenser (520), an expansion valve (530), and an evaporator (540), and is configured to perform a refrigeration cycle by circulating the refrigerant.
- the condenser (520) and the evaporator (540) are configured by a cross fin type heat exchanger
- the expansion valve (530) is configured by an electric valve.
- FIG. 20 illustrates the configuration of the turbo compressor (410) shown in FIG.
- the turbo compressor (410) is provided in the refrigerant circuit (510) and is configured to compress the refrigerant.
- the turbo compressor (410) includes a casing (411), an impeller (421), and an electric motor system (430).
- the electric motor system (430) includes a drive shaft (440), a bearingless motor (450), a radial magnetic bearing (460), a control unit (480), and a power supply unit (481).
- the electric motor system (430) further includes a first touchdown bearing (431), a second touchdown bearing (432), and a thrust magnetic bearing (433).
- axial direction refers to the direction of the rotational axis and the direction of the axis of the drive shaft (440)
- radial direction refers to the drive shaft (440). It is a direction orthogonal to the axial direction.
- the “outer peripheral side” is a side farther from the axis of the drive shaft (440), and the “inner peripheral side” is a side closer to the axis of the drive shaft (440).
- the casing (411) is formed in a cylindrical shape whose both ends are closed, and is arranged so that the cylinder axis is oriented horizontally.
- the space in the casing (411) is partitioned by the wall (411a), and the space on the right side of the wall (411a) constitutes the impeller chamber (S401) that houses the impeller (421), and the wall (411a)
- the left-hand space constitutes the electric motor chamber (S402) that houses the bearingless motor (450).
- the motor chamber (S402) contains a bearingless motor (450), a radial magnetic bearing (460), a first touchdown bearing (431), a second touchdown bearing (432), and a thrust magnetic bearing (433). These are fixed to the inner peripheral wall of the electric motor chamber (S402).
- the drive shaft (440) is provided to rotationally drive the impeller (421).
- the drive shaft (440) extends in the casing (411) in the axial direction to connect the impeller (421) and the bearingless motor (450).
- the impeller (421) is fixed to one end of the drive shaft (440), and the bearingless motor (450) is disposed in the middle of the drive shaft (440).
- the other end of the drive shaft (440) (that is, the end opposite to the one end to which the impeller (421) is fixed) is a disc-shaped portion (hereinafter referred to as “disk portion (441)”).
- the disk part (441) is comprised with the magnetic material (for example, iron).
- the impeller (421) is formed with a plurality of blades so that the outer shape is a substantially conical shape, and is housed in the impeller chamber (S401) in a state of being fixed to one end of the drive shaft (440).
- a suction pipe (P401) and a discharge pipe (P402) are connected to the impeller chamber (S401).
- the suction pipe (P401) is provided to guide the refrigerant (fluid) from the outside to the impeller chamber (S401).
- the discharge pipe (P402) is provided to return the high-pressure refrigerant (fluid) compressed in the impeller chamber (S401) to the outside. That is, in this example, the impeller (421) and the impeller chamber (S401) constitute a compression mechanism.
- the bearingless motor (450) has a pair of rotors (451) and a stator (454), drives the drive shaft (440) to rotate, and supports the radial load of the drive shaft (440) in a non-contact manner. It is configured as follows.
- the rotor (451) is fixed to the drive shaft (440), and the stator (454) is fixed to the inner peripheral wall of the casing (411).
- the bearingless motor (450) is constituted by a concurrent pole type bearingless motor.
- the rotor (451) of the bearingless motor (450) has a rotor core (452) and a plurality (four in this example) of permanent magnets (453) embedded in the rotor core (452). ing.
- the rotor core (452) is made of a magnetic material (for example, a laminated steel plate) and is formed in a cylindrical shape.
- a shaft hole for inserting the drive shaft (440) is formed in the central portion of the rotor core (452).
- the plurality of permanent magnets (453) are arranged at a predetermined angular pitch in the circumferential direction of the rotor (451).
- four permanent magnets (453) are arranged at an angular pitch of 90 ° in the circumferential direction of the rotor (451).
- the permanent magnet (453) is embedded in the vicinity (outer peripheral portion) of the outer peripheral surface of the rotor core (452) and formed in a shape (arc shape) along the outer peripheral surface of the rotor core (452).
- the four permanent magnets (453) have the same shape.
- the outer peripheral surface side of the four permanent magnets (453) is an N pole, and between the four permanent magnets (453) in the circumferential direction of the rotor (451) in the outer peripheral surface of the rotor core (452).
- the position is pseudo S pole.
- the outer peripheral surface side of the four permanent magnets (453) may be an S pole. In this case, a portion located between the four permanent magnets (453) in the circumferential direction of the rotor (451) in the outer circumferential surface of the rotor core (452) becomes a pseudo N pole.
- the stator (454) of the bearingless motor (450) is made of a magnetic material (for example, laminated steel plate), and is wound around the back yoke portion (455), a plurality of teeth portions (not shown), and the teeth portions.
- the back yoke portion (455) is formed in a cylindrical shape.
- the drive coil (456b, 456b, 456c) and the support coil (457a, 457b, 457c) are wound around each tooth portion in a distributed winding manner.
- the driving coil (456b, 456b, 456c) and the supporting coil (457a, 457b, 457c) may be wound around each tooth portion by a concentrated winding method.
- the driving coils (456b, 456b, 456c) are coils wound on the inner peripheral side of the tooth portion.
- the driving coils (456b, 456b, 456c) include a U-phase driving coil (456b) shown by being surrounded by a thick solid line in FIG. 21, and a V-phase driving coil (456b) shown by being surrounded by a thick broken line in FIG. And a W-phase driving coil (456c) surrounded by a thin solid line in FIG.
- the supporting coils (457a, 457b, 457c) are coils wound around the outer periphery of the tooth portion.
- the supporting coil (457a, 457b, 457c) includes a U-phase supporting coil (457a) surrounded by a thick solid line in FIG. 21, and a V-phase supporting coil (457b) surrounded by a thick broken line in FIG. And a W-phase support coil (457c) surrounded by a thin solid line in FIG.
- FIG. 22 shows magnet magnetic flux (magnet magnetic flux ⁇ 1 generated by the permanent magnet (453)) generated in the bearingless motor (450) and driving magnetic flux (driving magnetic flux BM1 generated to rotationally drive the driving shaft (440)).
- the driving magnetic flux BM1 is a magnetic flux generated according to the current flowing through the driving coils (456b, 456b, 456c).
- the bearingless motor (450) rotates the drive shaft (440) in the counterclockwise direction in FIG. 22 by rotating the drive shaft (440) by the interaction between the magnet magnetic flux ⁇ 1 and the drive magnetic flux BM1.
- Drive torque (T1)) is generated for rotation.
- FIG. 22 shows a current IM1 equivalent to the current flowing through the driving coils (456b, 456b, 456c).
- FIG. 23 illustrates the magnetic flux ⁇ 1 generated in the bearingless motor (450) and the supporting magnetic flux (the supporting magnetic flux BS1 generated to support the radial load of the drive shaft (440) in a non-contact manner).
- the supporting magnetic flux BS1 is a magnetic flux generated according to the current flowing through the supporting coils (457a, 457b, 457c).
- the bearingless motor (450) supports the radial load of the drive shaft (440) in a non-contact manner by the interaction between the magnet magnetic flux ⁇ 1 and the support magnetic flux BS1 (in FIG. 23, the drive shaft (440) Is configured to generate a supporting force (F1) acting in the right direction.
- FIG. 23 shows a current IS1 equivalent to the current flowing through the supporting coils (457a, 457b, 457c).
- FIG. 24 illustrates the magnetic flux ⁇ 1, the driving magnetic flux BM1, and the supporting magnetic flux BS1 generated in the bearingless motor (450).
- the bearingless motor (450) is configured to generate the driving torque (T1) and the supporting force (F1) simultaneously by the interaction of the magnet magnetic flux ⁇ 1, the driving magnetic flux BM1, and the supporting magnetic flux BS1.
- FIG. 24 shows a current IM1 equivalent to the current flowing through the drive coils (456b, 456b, 456c) and a current IS1 equivalent to the current flowing through the support coils (457a, 457b, 457c). .
- the radial magnetic bearing (460) has a plurality of electromagnets (first to fourth electromagnets (461 to 464) in this example) and is configured to support the radial load of the drive shaft (440) in a non-contact manner. Yes.
- the radial magnetic bearing (460) constitutes a heteropolar radial magnetic bearing.
- the first and second electromagnets (461, 462) face each other across the drive shaft (440), and support the drive shaft (440) in a non-contact manner by the combined electromagnetic force of the first and second electromagnets (461, 462).
- the third and fourth electromagnets (463, 464) face each other across the drive shaft (440), and support the drive shaft (440) in a non-contact manner by the combined electromagnetic force of the third and fourth electromagnets (463, 464).
- the opposing direction of the third and fourth electromagnets (463,464) (in the direction of descending right shoulder in FIG. 25) is orthogonal to the opposing direction of the first and second electromagnets (461,462) (in the upward direction of right shoulder in FIG. 25) in plan view. ing.
- the radial magnetic bearing (460) includes a magnetic bearing core (465) and a plurality (eight in this example) of coils (468).
- the magnetic bearing core (465) is configured by laminating a plurality of electromagnetic steel plates, and includes a back yoke (466) and a plurality (eight in this example) of teeth (467).
- the back yoke (466) is formed in a cylindrical shape.
- the eight teeth (467) are arranged in the circumferential direction at predetermined intervals (in this example, 45 ° intervals) along the inner peripheral surface of the back yoke (466), and each of them is from the inner peripheral surface of the back yoke (466). Projecting inward in the radial direction, each inner peripheral surface (protruding end surface) faces the outer peripheral surface of the drive shaft (440) with a predetermined gap therebetween.
- the eight coils (468) are wound around the eight teeth (467) of the magnetic bearing core (465), respectively.
- eight electromagnet portions first to eighth electromagnet portions (471 to 478)
- the first electromagnet part (471), the second electromagnet part (472), the seventh electromagnet part (477), the eighth electromagnet part (478), and the third electromagnet part ( 473), the fourth electromagnet part (474), the fifth electromagnet part (475), and the sixth electromagnet part (476) are arranged in this order.
- the first and second electromagnet portions (471, 472) are configured such that the coils (468) are connected in series to form a first electromagnet (461).
- the coils (468) are connected in series to form a second electromagnet (462).
- the current flowing in the coil of the first electromagnet (461) that is, the coil (468) of the first and second electromagnet portions (471, 472)
- the coil of the second electromagnet (462) that is, the third and fourth electromagnet portions ( 473, 474) by controlling the current flowing through the coil (468)
- the combined electromagnetic force of the first and second electromagnets (461, 462) is controlled to oppose the opposing direction (ie, diameter)
- the position of the drive shaft (440) in the direction, that is, the upward direction in FIG. 25) can be controlled.
- the fifth and sixth electromagnet parts (475, 476) constitute a third electromagnet (463) with the coils (468) connected in series.
- the coils (468) are connected in series to constitute a fourth electromagnet (464).
- the current flowing in the coil of the third electromagnet (463) that is, the coil (468) of the fifth and sixth electromagnet portions (475,476)
- the coil of the fourth electromagnet (464) that is, the seventh and eighth electromagnet portions ( 477, 478) by controlling the current flowing in the coil (468)
- the combined electromagnetic force of the third and fourth electromagnets (463,464) is controlled to oppose the third and fourth electromagnets (463,464) in the opposite direction (that is, the first
- the position of the drive shaft (440) in the radial direction orthogonal to the opposing direction of the first and second electromagnets (461, 462) in the direction of descending right shoulder in FIG. 25) can be controlled.
- winding direction of the coil (468) and the direction of the current flowing in the coil (468) act on each of the first to fourth electromagnets (461-464) in the direction in which the attractive force (that is, the drive shaft (440) is attracted). Electromagnetic force to be generated). Specifically, the winding direction of the coil (468) and the direction of the current flowing through the coil (468) are set so that magnetic flux is generated in the direction of the arrow shown in FIG.
- the first touchdown bearing (431) is provided near one end (right end in FIG. 20) of the drive shaft (440), and the second touchdown bearing (432) is the other end of the drive shaft (440). It is provided in the vicinity of (the left end portion in FIG. 20).
- the first and second touch-down bearings (431, 432) are provided on the drive shaft (when the drive shaft (440) is not lifted) when the bearingless motor (450) and the radial magnetic bearing (460) are de-energized. 440).
- the thrust magnetic bearing (433) has first and second thrust electromagnets (433a, 433b), and is configured to support the disk portion (441) of the drive shaft (440) in a non-contact manner by electromagnetic force.
- each of the first and second thrust electromagnets (433a, 433b) is formed in an annular shape, and is opposed to each other with the disk portion (441) of the drive shaft (440) interposed therebetween.
- the disk portion (441) of the drive shaft (440) is supported in a non-contact manner by the combined electromagnetic force of the thrust electromagnets (433a, 433b).
- the combined electromagnetic force of the first and second thrust electromagnets (433a, 433b) is controlled to control the first and second thrust electromagnets. It is possible to control the position of the drive shaft (440) in the facing direction (that is, the axial direction, left-right direction in FIG. 20) of (433a, 433b).
- Each part of the motor system (430) is provided with various sensors (not shown) such as a position sensor, a current sensor, and a rotation speed sensor.
- the bearingless motor (450) is provided with a position sensor (not shown) that outputs a detection signal corresponding to the position of the rotor (451) in the radial direction (radial direction), and the radial magnetic bearing (460) Is provided with a position sensor (not shown) that outputs a detection signal corresponding to the position of the drive shaft (440) in the radial direction, and the thrust magnetic bearing (433) has a thrust direction (
- a position sensor (not shown) that outputs a detection signal corresponding to the position in the axial direction) is provided.
- These position sensors are constituted by, for example, an eddy current displacement sensor that detects a gap (distance) between the position sensor and an object to be measured.
- the control unit (480) controls each part of the electric motor system (430) so that the rotation speed of the drive shaft (440) becomes a predetermined target rotation speed while the drive shaft (440) is supported without contact.
- the motor voltage command value, radial voltage command value, and thrust voltage command value are generated and output based on information such as detection signals from various sensors provided and the target rotational speed of the drive shaft (440).
- the motor voltage command value is a command value for controlling the voltage supplied to the coil (not shown) of the stator (454) of the bearingless motor (450).
- the radial voltage command value is a command value for controlling the voltage supplied to the coils (468) of the first to fourth electromagnets (461 to 464) of the radial magnetic bearing (460).
- the thrust voltage command value is a command value for controlling the voltage supplied to the coils (not shown) of the first and second thrust electromagnets (433a, 433b) of the thrust magnetic bearing (433).
- the control unit (480) includes, for example, an arithmetic processing unit such as a CPU, a storage unit such as a memory that stores programs and information for operating the arithmetic processing unit, and the like.
- the power supply unit (481) Based on the motor voltage command value, the radial voltage command value, and the thrust voltage command value output from the control unit (480), the power supply unit (481) generates a coil of the stator (454) of the bearingless motor (450) ( Specifically, the drive coils (456b, 456b, 456c), the support coils (457a, 457b, 457c)), and the coils (468) of the first to fourth electromagnets (461-464) of the radial magnetic bearing (460) And a voltage is supplied to the coils (not shown) of the first and second thrust electromagnets (433a, 433b) of the thrust magnetic bearing (433).
- the power supply unit (481) is configured by, for example, a PWM (Pulse Width Modulation) amplifier.
- the magnetic flux (specifically, the driving magnetic flux BM1 and the supporting magnetic flux BS1) generated in the bearingless motor (450) can be controlled by controlling the current flowing through the coil of the stator (454).
- the coils of the first to fourth electromagnets (461 to 464) can be controlled to control the combined electromagnetic force of the first to fourth electromagnets (461 to 464).
- the first and second thrust electromagnets can be controlled by controlling the current flowing through the coils 433a, 433b).
- the operation region of the turbo compressor (410) is mainly divided into a normal operation region (A), a high load torque region (B), a turbulence region (C), and a surging region (D). Separated.
- the normal operation region (A), the high load torque region (B), and the turbulence region (C) are regions located inside the surge line indicated by bold lines in FIG. 7, and the surging region (D) It is an area located outside. That is, in an emergency such as a power failure, the turbo compressor (410) may be temporarily operated in the surging region (D).
- the turbulence region (C) is a region in which the rotating stall of the turbo compressor (410) occurs.
- the load torque of the drive shaft (440) (torque required to rotate the drive shaft (440)) is relatively small, and the radial load of the drive shaft (440) is also compared. Become smaller.
- the load torque of the drive shaft (440) is relatively large, and the radial load of the drive shaft (440) is also relatively large. Note that the load torque of the drive shaft (440) is maximized at a predetermined point (specifically, the upper right vertex in FIG. 7) in the high load torque region (B).
- the load torque of the drive shaft (440) is relatively small, while the radial load of the drive shaft (440) is relatively large.
- the load torque of the drive shaft (440) is relatively small, while the radial load of the drive shaft (440) is relatively large.
- the radial load of the drive shaft (440) is maximized at a predetermined point in the surging area (D).
- an operation region in which the load torque of the drive shaft (440) is maximum (surging region (D) in this example)
- the operating region where the radial load of the drive shaft (440) is maximum is different from each other.
- the load torque of the drive shaft (440) is relatively small.
- the bearingless motor (450) is disposed at a position where a radial load larger than the radial load supported by the radial magnetic bearing (460) acts in the axial direction of the drive shaft (440).
- an impeller (421) is connected to one end of the drive shaft (440).
- the bearingless motor (450) is arranged at a position closer to the impeller (421) than the radial magnetic bearing (460) in the axial direction of the drive shaft (440). As the position of the drive shaft (440) in the axial direction becomes closer to one end of the drive shaft (440) (that is, the impeller (421)), the radial load of the drive shaft (440) at that position tends to increase.
- a bearingless motor (450) is placed at a position closer to the impeller (421) than the radial magnetic bearing (460) in the axial direction of the drive shaft (440), an impeller ( In the turbo compressor (410) to which 421) is connected, a bearingless motor (450) is placed at a position where the radial load of the drive shaft (440) is relatively large, and the radial load of the drive shaft (440) is compared.
- the radial magnetic bearing (460) can be arranged at a position where it becomes smaller.
- the drive shaft (440) is rotationally driven and non-contact supported using the bearingless motor (450) and the magnetic bearing (460).
- the turbo compression is performed.
- the machine (410) can be reduced in size.
- the bearingless motor (450) is disposed at a position where the radial load of the drive shaft (440) is relatively large, and the radial load of the drive shaft (440) is compared.
- the magnetic bearing (460) is arranged at a position where it becomes smaller. That is, the magnetic bearing (460) is arranged at a position where a radial load smaller than the radial load supported by the bearingless motor (450) acts.
- the electromagnetic force generated in the magnetic bearing (460) depends on the size of the magnetic bearing (460) (especially the shaft length and rotor diameter). The larger the size of the magnetic bearing (460), the larger the magnetic bearing (460). There is a tendency that the electromagnetic force generated in is increased.
- the radial load supported by the bearingless motor (450) is larger.
- the size (especially the shaft length and rotor diameter) of the magnetic bearing (460) can be made smaller than when the magnetic bearing (460) is disposed at a position where a radial load acts. Thereby, the turbo compressor (410) can be further downsized.
- the load torque of the drive shaft (440) (torque required to rotationally drive the drive shaft (440)) is maximum.
- the load torque of the drive shaft (440) is relatively small.
- the electromagnetic force of the bearingless motor (450) is sufficient for the support force (force for supporting the drive shaft (440) in a non-contact manner). Can be assigned to. As a result, it is possible to ensure the supporting force of the drive shaft (440) in the operation region where the radial load of the drive shaft (440) is relatively large.
- the bearingless motor (450) may be constituted by a surface magnet type bearingless motor.
- the rotor (451) includes a rotor core (452) and a plurality of (in this example) provided on the outer peripheral surface of the rotor core (452). Eight) permanent magnets (453) and a protective member (458) surrounding the outer periphery of the plurality of permanent magnets (453).
- the plurality of permanent magnets (453) are arranged at a predetermined angular pitch in the circumferential direction of the rotor (451).
- the permanent magnet (453) is arranged at an angular pitch of 45 ° in the circumferential direction of the rotor (451).
- the permanent magnet (453) is formed in a shape (arc shape) along the outer peripheral surface of the rotor core (452).
- the eight permanent magnets (453) have the same shape.
- the eight permanent magnets (453) each have an outer peripheral surface and an inner peripheral surface that are magnetic pole surfaces (S pole surface / N pole surface), and different magnetic poles (S pole / N pole) in the circumferential direction of the rotor (451). Are arranged alternately.
- the protection member (458) is formed in a cylindrical shape, and is provided on the outer periphery of the plurality of permanent magnets (453).
- FIG. 27 exemplifies the magnet magnetic flux ⁇ 1, the driving magnetic flux BM1, and the supporting magnetic flux BS1 generated in the surface magnet type bearingless motor (450) shown in FIG.
- the surface magnet type bearingless motor (450) shown in FIG. 26 and FIG. 27 has the magnet magnetic flux ⁇ 1 and the driving magnetic flux BM1.
- the driving torque (T1) and the supporting force (F1) are generated simultaneously by the interaction between the magnetic flux and the supporting magnetic flux BS1.
- the bearingless motor (450) may be constituted by an embedded magnet type bearingless motor.
- the rotor (451) includes a rotor core (452) and a plurality of (8 in this example) embedded in the rotor core (452). ) Permanent magnet (453).
- the plurality of permanent magnets (453) are arranged at a predetermined angular pitch in the circumferential direction of the rotor (451). In this example, eight permanent magnets (453) are arranged at an angular pitch of 45 ° in the circumferential direction of the rotor (451).
- the permanent magnet (453) is formed in a shape (arc shape) along the outer peripheral surface of the rotor core (452).
- the eight permanent magnets (453) have the same shape.
- the eight permanent magnets (453) each have an outer peripheral surface and an inner peripheral surface that are magnetic pole surfaces (S pole surface / N pole surface), and different magnetic poles (S pole / N pole) in the circumferential direction of the rotor (451). Are arranged alternately.
- FIG. 29 illustrates the magnetic flux ⁇ 1, the driving magnetic flux BM1, and the supporting magnetic flux BS1 generated in the embedded magnet type bearingless motor (450) shown in FIG.
- the embedded magnet type bearingless motor (450) shown in FIGS. 28 and 29 has the magnet magnetic flux ⁇ 1 and the driving magnetic flux.
- the driving torque (T1) and the supporting force (F1) are generated simultaneously by the interaction between the BM1 and the supporting magnetic flux BS1.
- the bearingless motor (450) is comprised by the concurrent pole type bearingless motor or the embedded magnet type bearingless motor.
- the magnetic path of BS1 is a path passing through the permanent magnet (453)
- the magnetic path of the supporting magnetic flux BS1 is permanent.
- the path does not pass through the magnet (453).
- the magnetic resistance of the permanent magnet (453) is higher than the magnetic resistance of the rotor core (452). Therefore, the magnetic pole type bearingless motor (450) has a lower magnetic resistance in the magnetic path of the supporting magnetic flux BS1 than the surface magnet type bearingless motor (450). Therefore, the concurrent pole type bearingless motor (450) generates a greater support force (force for supporting the drive shaft (440) in a non-contact manner) than the surface magnet type bearingless motor (450). Can do.
- the surface magnet type bearingless motor (450) shown in FIGS. (458) is provided, but the protective member (458) is not provided in the embedded magnet type bearingless motor (450) shown in FIGS. Therefore, the embedded magnet type bearingless motor (450) has a lower magnetic resistance in the magnetic path of the supporting magnetic flux BS1 than the surface magnet type bearingless motor (450). Therefore, the embedded magnet type bearingless motor (450) generates a larger supporting force (force for supporting the drive shaft (440) in a non-contact manner) than the surface magnet type bearingless motor (450). Can do.
- the surfaceless magnet type bearingless motor (450) can be converted into a bearingless motor (450).
- the support force (force for supporting the drive shaft (440) in a non-contact manner) in the bearingless motor (450) can be increased as compared with the case of the configuration.
- FIG. 30 shows a configuration example of a turbo compressor (601) according to Embodiment 5 of the present invention.
- the turbo compressor (601) is connected to a refrigerant circuit (not shown) that performs a refrigeration cycle operation by circulating the refrigerant, and compresses the refrigerant (fluid).
- the turbo compressor (601) includes a casing (602), a compression mechanism (603), and an electric motor system (610).
- the casing (602) is formed in a cylindrical shape whose both ends are closed, and is arranged so that the cylinder axis is horizontally oriented.
- the space in the casing (602) is partitioned by the wall portion (602a), and the space on the right side of the wall portion (602a) constitutes the impeller chamber (S601) that houses the impeller (603a) (described later), and the wall portion
- the space on the left side of (602a) constitutes an electric motor chamber (S602) that houses a bearingless motor (640) (described later).
- a drive shaft (605) extending in the axial direction in the casing (602) connects the compression mechanism (603) and the bearingless motor (640).
- the compression mechanism (603) includes an impeller chamber (S601) and an impeller (603a), and the compression mechanism (603) compresses a fluid (a refrigerant in this example).
- the impeller (603a) is formed by a plurality of blades so that the outer shape is substantially conical, and is fixed to one end of the drive shaft (605).
- the compression mechanism (603) is an example of the load of the present invention.
- the electric motor system (610) includes a touch-down bearing (606), a bearingless motor (640), a power supply (635), two radial magnetic bearings (621), a thrust magnetic bearing (622), and a plurality (in this example, five ) Displacement sensor (631,632) and a controller (690).
- the bearingless motor (640) is disposed in the electric motor room (S602).
- the bearingless motor (640) is configured to rotationally drive the drive shaft (605) by electromagnetic force and to support the radial load of the drive shaft (605) in a non-contact manner.
- the bearingless motor (640) has a pair of rotors (641) and a stator (644).
- the rotor (641) is fixed to the drive shaft (605), and the stator (644) is fixed to the inner peripheral wall of the casing (602).
- FIG. 31 is a cross-sectional view showing a configuration example of the bearingless motor (640).
- the bearingless motor (640) is a concurrent pole type bearingless motor.
- the stator (644) of the bearingless motor (640) includes a back yoke portion (645), a plurality of teeth portions (not shown), a drive coil (646a to 646c) wound around the teeth portions, and a support Coils (647a to 647c).
- the rotor (641) of the bearingless motor (640) includes a core portion (642) and a plurality (four in this example) of permanent magnets (643) embedded in the core portion (642).
- the stator (644) is made of a magnetic material (for example, a laminated steel plate).
- the back yoke part (645) of the stator (644) is formed in a cylindrical shape.
- the drive coils (646a to 646c) and the support coils (647a to 647c) are wound around each tooth portion by a distributed winding method.
- the drive coils (646a to 646c) and the support coils (647a to 647c) may be wound around each tooth portion by a concentrated winding method.
- the driving coils (646a to 646c) are coils wound on the inner peripheral side of the tooth portion.
- the driving coils (646a to 646c) include a U-phase driving coil (646a) surrounded by a thick line in FIG. 31, a V-phase driving coil (646b) surrounded by a thick broken line, and a W surrounded by a thin line. And a phase driving coil (646c).
- the support coils (647a to 647c) are coils wound around the outer periphery of the tooth portion.
- the supporting coils (647a to 647c) include a U-phase supporting coil (647a) surrounded by a thick line, a V-phase supporting coil (647b) surrounded by a thick broken line, and a W surrounded by a thin line in FIG. And a phase support coil (647c).
- the core part (642) of the rotor (641) is formed in a cylindrical shape.
- a shaft hole (not shown) for inserting the drive shaft (605) is formed in the central portion of the core portion (642).
- the core part (642) is comprised with the magnetic material (for example, laminated steel plate).
- the magnetic material for example, laminated steel plate.
- four permanent magnets (643) having a shape along the outer peripheral surface are embedded at an angular pitch (AP1) of 90 ° in the circumferential direction of the rotor (641). ing.
- These four permanent magnets (643) have the same shape.
- the outer peripheral surface side of each permanent magnet (643) is an N pole, and the outer peripheral surface of the core portion (642) between each permanent magnet (643) is a pseudo S pole.
- the outer peripheral surface side of each permanent magnet (643) may be a south pole.
- FIG. 32 shows a magnetic flux ⁇ 1 generated by each permanent magnet (643) and a driving magnetic flux BM1 generated for rotationally driving the impeller (603a) and the drive shaft (605) in the bearingless motor (640).
- the bearingless motor (640) rotates the drive torque T1 (that is, the drive shaft (605) shown in FIG. 32 counterclockwise in FIG. 32) by the interaction between the magnet magnetic flux ⁇ 1 and the drive magnetic flux BM1. ) Is generated.
- a current IM1 equivalent to the current flowing through the driving coils (646a to 646c) is shown.
- FIG. 33 shows a magnetic flux ⁇ 1 generated by each permanent magnet (643) and a supporting magnetic flux BS1 generated to support the radial load of the drive shaft (605) in a non-contact manner in the bearingless motor (640).
- the bearingless motor (640) generates the supporting force F1 (that is, the force pushing the drive shaft (605) to the right in FIG. 33) shown in FIG. 33 by the interaction between the magnet magnetic flux ⁇ 1 and the supporting magnetic flux BS1. It is configured to let you.
- a current IS1 equivalent to the current flowing through the supporting coils (647a to 647c) is shown.
- the magnetic path of the supporting magnetic flux BS1 includes the back yoke portion (645) and teeth portion of the stator (644), the air gap, and the core portion (642) of the rotor (641). It is a route that passes.
- the magnetic resistance of the back yoke portion (645), the tooth portion, and the core portion (642) is smaller than the magnetic resistance of the permanent magnet (643).
- FIG. 34 shows a magnetic flux ⁇ 1 generated by each permanent magnet (643) in the bearingless motor (640), a driving magnetic flux BM1 generated for rotationally driving the impeller (603a) and the drive shaft (605), and driving.
- a supporting magnetic flux BS1 generated to support the radial load of the shaft (605) in a non-contact manner is shown.
- the bearingless motor (640) is configured to simultaneously generate the driving torque T1 and the supporting force F1 shown in the figure by the interaction of the magnet magnetic flux ⁇ 1, the driving magnetic flux BM1, and the supporting magnetic flux BS1.
- currents IM1 and IS1 equivalent to the currents flowing through the drive coils (646a to 646c) and the support coils (647a to 647c) are shown.
- the electric motor system (610) has two radial magnetic bearings (621), and these radial magnetic bearings (621) are respectively disposed on both sides in the axial direction of the bearingless motor (640).
- Each radial magnetic bearing (621) has electromagnets (671 to 678) facing each other across a supported body (specifically, drive shaft (605)), and the electromagnetic force of the electromagnets (671 to 678).
- a radial force is applied to the supported body by a combined force (combined electromagnetic force (F)).
- the combined electromagnetic force (F) of the electromagnet (671 to 678) is controlled by controlling the current flowing through these electromagnets (671 to 678).
- a reference number may be attached with a branch number (specifically, 621-1, 621- 2).
- FIG. 35 is a cross-sectional view showing a configuration example of the radial magnetic bearing (621).
- FIG. 36 is a longitudinal sectional view showing a configuration example of the radial magnetic bearing (621).
- the radial magnetic bearing (621) is a heteropolar radial magnetic bearing and includes a magnetic bearing core (661) and eight coils (665).
- the magnetic bearing core (661) is configured by laminating a plurality of electromagnetic steel plates, and includes a back yoke (662) and eight teeth (663).
- the back yoke (662) is formed in a cylindrical shape.
- the eight teeth (663) are arranged in the circumferential direction at predetermined intervals (in this example, 45 ° intervals) along the inner peripheral surface of the back yoke (662), and each of them is an inner peripheral surface of the back yoke (662). Projecting inward in the radial direction, and the respective inner peripheral surfaces (protruding end surfaces) face the outer peripheral surface of the supported portion of the drive shaft (605) with a predetermined gap therebetween.
- the radial magnetic bearing (621) includes eight electromagnets (first to eighth electromagnets (671 to 678)). Specifically, in the radial magnetic bearing (621), the first electromagnet (671), the second electromagnet (672), the seventh electromagnet (677), the eighth electromagnet (678), the third electromagnet (673), the fourth electromagnet ( 674), the fifth electromagnet (675), and the sixth electromagnet (676) are arranged in this order in the clockwise direction in FIG. Note that the winding direction of the coil (665) in each electromagnet (671 to 678) and the direction of the current flowing through each coil (665) are set so that magnetic flux is generated in the direction of the arrow shown in FIG. Yes.
- a first electromagnet (671) and a second electromagnet (672) are connected in series to form a first electromagnet pair (651).
- the third electromagnet (673) and the fourth electromagnet (674) are connected in series to form a second electromagnet pair (652).
- the fifth electromagnet (675) and the sixth electromagnet (676) are connected in series to form a third electromagnet pair (653), and the seventh electromagnet (677) and the eighth electromagnet (678) are connected in series.
- the fourth electromagnet pair (654) is configured by connection.
- the first and second electromagnet pairs (651, 652) face each other with the supported portion of the drive shaft (605) interposed therebetween, and the combined electromagnetic force of the first and second electromagnet pairs (651, 652) ( F) supports the supported portion of the drive shaft (605) in a non-contact manner.
- the third and fourth electromagnet pairs (653,654) also face each other across the supported portion of the drive shaft (605) and are driven by the combined electromagnetic force (F) of the third and fourth electromagnet pairs (653,654).
- the supported part of the shaft (605) is supported in a non-contact manner.
- the facing direction (left and right direction in FIG. 35) of the third and fourth electromagnet pairs (653,654) is the same as the facing direction (vertical direction in FIG. 35) of the first and second electromagnet pairs (651,652) in plan view. Orthogonal.
- FIG. 37 shows a state of connection between two radial magnetic bearings (621).
- the first electromagnet pair (651) in one radial magnetic bearing (621-1) and the second electromagnet pair in the other radial magnetic bearing (621-2). (652) is connected in series.
- the second electromagnet pair (652) in one radial magnetic bearing (621-1) and the first electromagnet pair (651) in the other radial magnetic bearing (621-2) are connected in series.
- the third electromagnet pair (653) in one radial magnetic bearing (621-1) and the other radial magnetic bearing (621-2). ) Is connected in series with the fourth electromagnet pair (654). Further, the third electromagnet pair (653) in one radial magnetic bearing (621-1) and the fourth electromagnet pair (654) in the other radial magnetic bearing (621-2) are connected in series. That is, in the electric motor system (610), there are four pairs of electromagnet pairs (651 to 654) connected in series. The four pairs of electromagnets (651 to 654) connected in series are supplied with direct current from a separate output system (described later) of the power source (635). In FIG. 37, only two systems of the output of the power source (635) are shown.
- the motor system (610) is provided with one thrust magnetic bearing (622).
- the thrust magnetic bearing (622) has a pair of electromagnets facing each other with a supported body (specifically, a disk portion (605a) described later) interposed therebetween, and the supported body is supported by a combined electromagnetic force (F) of the electromagnet pair. It is configured to support in a non-contact manner.
- the thrust magnetic bearing (622) has first and second electromagnets (681,682).
- the drive shaft (605) has a disk-like portion (hereinafter referred to as a disk portion (605a)) at the other end (the end opposite to the one end to which the impeller (603a) is fixed).
- the first and second electromagnets (681, 682) are opposed to each other across a disk portion (605a) that is a supported portion of the drive shaft (605), and the drive shaft is driven by the combined electromagnetic force of the first and second electromagnets (681, 682).
- the supported portion (disk portion (605a)) of (605) is supported in a non-contact manner.
- the facing direction of the first and second electromagnets (681, 682) that is, the axial direction (hereinafter also referred to as the thrust direction).
- the position of the supported portion (disk portion (605a)) of the drive shaft (605) in the right and left direction can be controlled.
- the power source (635) supplies direct current to the electromagnets (671 to 678, 681, 682) included in the magnetic bearings (621, 622).
- the power source (635) has four outputs for the radial magnetic bearing (621). That is, the power source (635) separately supplies direct current to each of the four pairs of electromagnet pairs (651 to 654) connected in series.
- the power source (635) has two outputs for the thrust magnetic bearing (622).
- the power source (635) includes an output system for the first electromagnet (681) and an output system for the second electromagnet (682).
- the power source (635) is configured so that the voltage of each output system can be controlled separately. There is no limitation on the power source (635), and power sources with various configurations can be employed.
- the touch-down bearing (606) moves the drive shaft (605) in the radial and thrust directions when the motor system (610) is de-energized (that is, when the drive shaft (605) is not lifted). It is configured to support the direction.
- the turbo compressor (601) is provided with two types of displacement sensors, a radial displacement sensor (631) and a thrust displacement sensor (632).
- the radial displacement sensor (631) and the thrust displacement sensor (632) are both eddy current type displacement sensors.
- These displacement sensors (631, 632) are connected to two electromagnet pairs (for example, a pair of first and second electromagnet pairs (651, 652)) facing each other with a supported body (in this example, the drive shaft (605)) interposed therebetween. It is provided correspondingly (adjacent) and configured to detect the gap (g) of the drive shaft (605) with respect to the displacement sensor (631,632) at the mounting position of the displacement sensor (631,632).
- each radial displacement sensor (631) In the electric motor system (610), two radial displacement sensors (631) are provided for each radial magnetic bearing (621). That is, the turbo compressor (601) has four radial displacement sensors (631). These radial displacement sensors (631) detect the gap (g) of the drive shaft (605) with respect to the radial displacement sensor (631). In each radial magnetic bearing (621), one radial displacement sensor (631) detects the gap (g) in the facing direction (hereinafter referred to as Y direction) of the first electromagnet pair (651) and the second electromagnet pair (652). .
- the Y direction is the radial direction of the radial magnetic bearing (621), and is the vertical direction in FIG.
- the other radial displacement sensor (631) is in the opposing direction of the third electromagnet pair (653) and the fourth electromagnet pair (654) (that is, the radial direction orthogonal to the Y direction (hereinafter referred to as the X direction)). Yes, in FIG. 35, the gap (g) in the left-right direction) is detected.
- thrust displacement sensor (632) Only one thrust displacement sensor (632) is provided in the turbo compressor (601). This thrust displacement sensor (632) is the facing direction of the first electromagnet (681) and the second electromagnet (682) in the thrust magnetic bearing (622) (that is, the axial direction of the drive shaft (605)). The gap (g) in the left-right direction) is detected.
- the axial direction of the drive shaft (605) may be referred to as the Z direction.
- the controller (690) controls the bearingless motor (640) and the magnetic bearings (621,622) so that the supported body (in this example, the supported portion of the drive shaft (605)) is supported in a non-contact manner. Control. Specifically, the controller (690) controls the flying of the drive shaft (605) by controlling the electromagnetic force of the bearingless motor (640) and the magnetic bearings (621, 622).
- the controller (690) can be specifically configured using a microcomputer and a memory device storing software for operating the microcomputer.
- the bearingless motor (640) controls displacement in the radial direction (X direction and Y direction, hereinafter sometimes referred to as translation direction) of the drive shaft (605) (hereinafter referred to as radial direction control).
- the two radial magnetic bearings (621) mainly control displacement in the tilt direction of the drive shaft (605) (displacement in the rotational direction around the X axis or Y axis) (hereinafter referred to as the tilt direction).
- the X axis is an axis along the X direction and passing through the center of gravity of the entire rotation system including the bearingless motor (640)
- the Y axis is along the Y direction and the center of gravity. It is a passing axis.
- the center of rotation when displacing in the tilt direction may be considered as the center of gravity of the entire rotating system including the bearingless motor (640).
- the controller (690) reads the gap (g) in the X direction and the gap (g) in the Y direction from the radial displacement sensor (631). For example, the controller (690) uses the detected value of the X direction radial displacement sensor (631) corresponding to one radial magnetic bearing (621) and the X direction corresponding to the other radial magnetic bearing (621). The radial displacement (here, the displacement in the X direction) of the drive shaft (605) at the rotor (641) position of the bearingless motor (640) is calculated from the detected value of the radial displacement sensor (631). Similarly, the controller (690) also calculates the displacement of the drive shaft (605) in the Y direction.
- the controller (690) uses an algorithm such as feedback control (for example, so-called PID control) in the X direction in the bearingless motor (640) according to the obtained displacement in the X direction (details). Controls the position of the drive shaft (605) in the X direction (radial direction) to the target position by controlling the supporting magnetic flux BS1).
- the target position is, for example, the center in the X direction of the stator (644) of the bearingless motor (640).
- the controller (690) controls the electromagnetic force in the Y direction in the bearingless motor (640), and the Y direction (radial direction) of the drive shaft (605). Is controlled to the target position.
- the controller (690) also controls displacement of the drive shaft (605) in the tilt direction. In the tilt direction control, the controller (690) obtains a displacement in the tilt direction.
- the displacement in the tilt direction is a displacement angle around the center of rotation, and is hereinafter also referred to as a tilt displacement angle.
- Expression (1) shown below is an expression used when the controller (690) obtains the tilt displacement angle ( ⁇ x) about the X axis.
- g1 is a detection value of the radial displacement sensor (631) for Y direction corresponding to one radial magnetic bearing (621).
- g2 is a detection value of the radial displacement sensor (631) for the Y direction corresponding to the other radial magnetic bearing (621).
- L is the distance in the Z direction (referred to as the total length L) between the two radial displacement sensors (631) for the Y direction.
- FIG. 38 shows the relationship between the tilt displacement angle ( ⁇ x), the gaps (g1, g2) detected by each sensor, and the total length L.
- ⁇ x tilt displacement angle
- the controller (690) also calculates a tilt displacement angle ( ⁇ y) about the Y axis.
- the tilt displacement angle ( ⁇ y) about the Y-axis corresponds to the detected value of the X-direction radial displacement sensor (631) corresponding to one radial magnetic bearing (621) and the other radial magnetic bearing (621).
- the tilt displacement angle ( ⁇ y) can also be calculated using an approximate expression similar to expression (1).
- the controller (690) performs feedback control according to the deviation between the target value (for example, zero degree) of the tilt displacement angle ( ⁇ x) and the obtained tilt displacement angle ( ⁇ x).
- PID control is used to control the first and second electromagnet pairs (651, 652), more specifically, the first to fourth electromagnets (671,672,673,674) of each radial magnetic bearing (621). .
- the first electromagnet pair (651) in one radial magnetic bearing (621) and the second electromagnet pair (652) in the other radial magnetic bearing (621). Are connected in series.
- the two radial magnetic bearings (621) generate combined electromagnetic forces (F) having opposite phases with respect to the Y direction. That is, the displacement in the Y direction of the drive shaft (605) in one radial magnetic bearing (621) is opposite to the displacement in the Y direction of the drive shaft (605) in the other radial magnetic bearing (621).
- the axis (605) is displaced (rotated) in the tilt direction (around the X axis).
- the controller (690) uses, for example, a feedback control algorithm in accordance with the deviation between the target value (for example, zero degree) of the tilt displacement angle ( ⁇ y) and the obtained tilt displacement angle ( ⁇ y).
- the third and fourth electromagnet pairs (653,654) that is, the fifth to eighth electromagnets (675,676,677,678) are controlled.
- the third electromagnet pair (653) in the other radial magnetic bearing (621) and the fourth electromagnet pair (654) in one radial magnetic bearing (621) are connected in series. Therefore, in the process of feedback control, the two radial magnetic bearings (621) generate combined electromagnetic forces (F) that are in opposite phases with respect to the X direction.
- the displacement in the X direction of the drive shaft (605) in one radial magnetic bearing (621) and the displacement in the X direction of the drive shaft (605) in the other radial magnetic bearing (621) are opposite to each other.
- the axis (605) is displaced (rotated) in the tilt direction (around the Y axis).
- the thrust magnetic bearing (622) is controlled by the controller (690) to perform displacement control in the thrust direction, but the description thereof is omitted here.
- the radial displacement control is shared in the bearingless motor (640). Therefore, the radial load imposed on the radial magnetic bearing (621) is reduced. Thereby, in this embodiment, compared with the apparatus which supports a drive shaft only with a radial magnetic bearing, it becomes possible to reduce a radial magnetic bearing (621). If the radial magnetic bearing (621) can be downsized, the distance from the center of gravity of the entire rotating system including the bearingless motor (640) to each radial magnetic bearing (621) can be reduced without increasing the size of the electric motor system (610). It becomes possible to stretch.
- the distance from the center of gravity to the radial magnetic bearing (621) (that is, the distance from the force application point to the center of gravity) can be increased, it is advantageous in tilt displacement control. That is, in the present embodiment, it is possible to reduce displacement of the drive shaft (605) in the tilt direction while suppressing an increase in size of the electric motor system (610).
- each of the electromagnets (671 to 678) so as to generate a synthetic electromagnetic force (F) larger than (). By doing so, it is possible to generate the force for reducing the tilt displacement angle in a balanced manner.
- the magnetic in order to make the magnitude of the combined electromagnetic force (F) different between the two magnetic bearings (621), for example, the number of turns of the coil (665), the magnitude of the current passed through each coil (665), the magnetic
- the number of turns of the coil (665) of the radial magnetic bearing (621) closer to the load (603) is set to the electromagnet (671) of the other radial magnetic bearing (621). It is conceivable to increase the number of turns of the coil (665) of ⁇ 678).
- it is conceivable to change the magnitude of the magnetic resistance of the magnetic circuit it is conceivable to change the width of the magnetic path.
- the axial length of the magnetic bearing (621) closer to the load (603) is longer than the axial length of the other magnetic bearing (621). 603), the combined electromagnetic force (F) of the closer magnetic bearing (621) can be made larger.
- the diameter of the portion facing the magnetic bearing (621) closer to the load (603) is set to the diameter of the portion facing the other magnetic bearing (621). By making it larger than the diameter, the combined electromagnetic force (F) of the magnetic bearing (621) closer to the load (603) can be made larger.
- the radial magnetic bearing (621) may also generate a supporting force in the radial direction.
- the electric motor system (610) may be used to drive a load other than the compression mechanism (603).
- controller for the bearingless motor (640) and the controller for the magnetic bearing (621) may be provided separately.
- the turbo compressor (701) of this embodiment is provided in a refrigerant circuit (not shown) that performs a refrigeration cycle, and compresses the refrigerant.
- the turbo compressor (701) includes a casing (710), an impeller (720), a drive shaft (730), a touchdown bearing (740,741), a thrust magnetic bearing (750), Control unit (790), power supply unit (791), first bearingless motor (760), second bearingless motor (770), first dynamic pressure gas bearing (780), and second dynamic pressure gas And a bearing (782).
- the first bearingless motor (760) and the second bearingless motor (770) are arranged side by side in the axial direction of the drive shaft (730).
- the first and second bearingless motors (760,770) and the first and second dynamic pressure gas bearings (780,782) constitute a drive support portion.
- the “axial direction” means the rotational axis direction and the direction of the axis of the drive shaft (730), and the “radial direction” means the drive shaft ( 730) is a direction orthogonal to the axial direction.
- the “outer peripheral side” is a side farther from the axis of the drive shaft (730), and the “inner peripheral side” is a side closer to the axis of the drive shaft (730).
- the casing (710) is formed in a cylindrical shape whose both ends are closed, and is arranged so that the cylinder axis is horizontally oriented.
- the space in the casing (710) is partitioned by the wall (711), and the space on the right side of the wall (711) constitutes the impeller chamber (712) that houses the impeller (720), and the wall (711)
- the left-side space constitutes an electric motor room (714) that houses the first and second bearingless motors (760, 770).
- a drive shaft (730) extending in the axial direction in the casing (710) connects the impeller (720) and the first and second bearingless motors (760, 770).
- the first and second bearingless motors (760, 770) constitute a drive support portion.
- the impeller (720) is formed by a plurality of blades so that the outer shape becomes a substantially conical shape.
- the impeller (720) is housed in the impeller chamber (712) in a state of being fixed to one end of the drive shaft (730).
- a suction pipe (715) and a discharge pipe (716) are connected to the impeller chamber (712), and a compression space (713) is formed on the outer periphery of the impeller chamber (712).
- the suction pipe (715) is provided to guide the refrigerant from the outside into the impeller chamber (712), and the discharge pipe (716) is provided to return the high-pressure refrigerant compressed in the impeller chamber (712) to the outside. Is provided.
- the turbo compressor (701) is provided with two touchdown bearings (740, 741).
- One touch-down bearing (740) is provided near one end of the drive shaft (730) (right end in FIG. 39), and the other touch-down bearing (741) is provided near the other end of the drive shaft (730). Is provided.
- These touchdown bearings (740,741) support the drive shaft (730) when the first and second bearingless motors (760,770) are de-energized (ie, when the drive shaft (730) is not floating) Is configured to do.
- the thrust magnetic bearing (750) has first and second electromagnets (751, 752), and the other end of the drive shaft (730) (ie, the impeller (720) is fixed).
- a disk-shaped portion (hereinafter referred to as a disk portion (731)) provided at the end opposite to the one end portion is configured to be supported in a non-contact manner by electromagnetic force.
- the thrust magnetic bearing (750) controls the current flowing through the first and second electromagnets (751, 752), thereby opposing the first and second electromagnets (751, 752) in the opposite direction (ie, axial direction, left and right in FIG. 39).
- the position of the supported portion (disk portion (731)) of the drive shaft (730) in the direction can be controlled.
- the control unit (790) is a gap sensor (not shown) that can detect a gap between the disk unit (731) and the thrust magnetic bearing (750) so that the position of the drive shaft (730) becomes a desired position. ), A detection value of a gap sensor (not shown) capable of detecting a gap between the stator (764,774) and the rotor (761,771) in the first and second bearingless motors (760,770), and an impeller (720) and the voltage command value (thrust voltage command value) for controlling the voltage supplied to the thrust magnetic bearing (750) based on the information on the target rotational speed of the drive shaft (730), the first and second A voltage command value (motor voltage command value) for controlling the voltage supplied to the bearingless motor (760, 770) is output.
- the control unit (790) can be configured by a microcomputer (not shown) and a program for operating the microcomputer.
- the power supply unit (791) supplies voltages to the thrust magnetic bearing (750) and the first and second bearingless motors (760,770) based on the thrust voltage command value and the motor voltage command value from the control unit (790), respectively.
- the power supply unit (791) can be configured by a PWM (Pulse Width Modulation) amplifier.
- the power supply unit (791) constitutes an electric circuit.
- the first bearingless motor (760) is disposed on the side close to the impeller (720) in the motor chamber (714).
- the first bearingless motor (760) is configured to rotationally drive the drive shaft (730) by electromagnetic force and to support the radial load of the drive shaft (730) in a non-contact manner.
- the first bearingless motor (760) has a pair of rotors (761) and a stator (764).
- the rotor (761) is fixed to the drive shaft (730), and the stator (764) is fixed to the inner peripheral wall of the casing (710).
- the rotor (761) is formed in a cylindrical shape with a plurality of permanent magnets (not shown) embedded therein.
- the diameter of the rotor (761) is substantially equal to the diameter of the drive shaft (730).
- the rotor (761) is fixed to a first small diameter portion (732) formed on the drive shaft (730) (that is, a portion of the drive shaft (730) having a smaller diameter than the surroundings).
- the diameter of the rotor (761) may be different from the diameter of the drive shaft (730).
- the stator (762) is arranged on the outer peripheral side of the rotor (761) and is formed in a cylindrical shape.
- a coil (763) through which a current within a predetermined current range flows is wound around the stator (762).
- the coil (763) may be wound by a distributed winding method or may be wound by a concentrated winding method.
- the coil end portion (764) of the stator (762) (that is, the portion in which the coil (763) protrudes in the axial direction from the core portion of the stator (762)) is molded with the first molding resin (765). Yes.
- a first dynamic pressure gas bearing (780) is fitted in the first recess (766).
- the first dynamic pressure gas bearing (780) is constituted by, for example, a cylindrical sleeve (780) made of a resin having a relatively high thermal conductivity.
- two O-rings (781) are attached to the outer peripheral portion of the first dynamic pressure gas bearing (780).
- the first dynamic pressure gas bearing (780) is fixed to the first mold resin (765) via the O-ring (781).
- the entire first dynamic pressure gas bearing (780) overlaps in the radial direction of the coil end portion (764) and the drive shaft (730).
- the first dynamic pressure gas bearing (780) may partially overlap the coil end portion (764) and the radial direction of the drive shaft (730).
- the first dynamic pressure gas bearing (780) supports the radial load of the drive shaft (730) in a non-contact manner when the impeller (720) and the drive shaft (730) rotate.
- the support force in this case increases as the rotational speeds of the impeller (720) and the drive shaft (730) increase.
- the second bearingless motor (770) is disposed on the far side from the impeller (720) in the motor chamber (714).
- the second bearingless motor (770) is configured to rotationally drive the drive shaft (730) by electromagnetic force and to support the radial load of the drive shaft (730) in a non-contact manner.
- the second bearingless motor (770) has a pair of rotors (771) and a stator (772).
- the rotor (771) is fixed to the drive shaft (730), and the stator (772) is fixed to the casing (710).
- the rotor (771) is formed in a cylindrical shape with a plurality of permanent magnets (not shown) embedded therein.
- the diameter of the rotor (771) is substantially equal to the diameter of the drive shaft (730).
- the rotor (771) is fixed to a second small diameter portion (733) formed on the drive shaft (730) (that is, a portion of the drive shaft (730) having a smaller diameter than the surroundings).
- the diameter of the rotor (771) may be different from the diameter of the drive shaft (730).
- the stator (772) is arranged on the outer peripheral side of the rotor (771) and is formed in a cylindrical shape.
- a coil (773) through which a current within a predetermined current range flows is wound around the stator (772).
- the coil (773) may be wound by a distributed winding method or may be wound by a concentrated winding method.
- the coil end portion (764) of the stator (772) (that is, the portion where the coil (773) protrudes in the axial direction from the core portion of the stator (772)) is molded with the second molding resin (775). Yes.
- a second dynamic pressure gas bearing (782) is fitted in the second recess (776).
- the second dynamic pressure gas bearing (782) is shown reversed from the state of FIG.
- the second dynamic pressure gas bearing (782) is configured by, for example, a cylindrical sleeve (782) made of a resin having a relatively high thermal conductivity.
- two O-rings (783) are attached to the outer periphery of the second dynamic pressure gas bearing (782).
- the second dynamic pressure gas bearing (782) is fixed to the second mold resin (775) via the O-ring (783).
- the entire second dynamic pressure gas bearing (782) overlaps in the radial direction of the coil end portion (774) and the drive shaft (730).
- the second dynamic pressure gas bearing (782) may partially overlap the coil end portion (774) and the radial direction of the drive shaft (730).
- the second dynamic pressure gas bearing (782) supports the radial load of the drive shaft (730) in a non-contact manner when the impeller (720) and the drive shaft (730) rotate.
- the support force in this case increases as the rotational speeds of the impeller (720) and the drive shaft (730) increase.
- the first and second dynamic pressure gas bearings (780,782) support at least a part of the radial load of the drive shaft (730), whereby the radials that the first and second bearingless motors (760,770) handle.
- the load can be reduced. For this reason, it becomes possible to increase the drive torque output of the first and second bearingless motors (760, 770).
- the axial length of the rotating system including the first and second bearingless motors (760,770), the first and second dynamic pressure gas bearings (780,782), and the drive shaft (730) is set. Can be set small. Therefore, the area where the turbo compressor (701) can be operated safely can be expanded.
- the entire first and second dynamic pressure gas bearings (780, 782) overlap in the radial direction of the coil end portion (764, 774) of the stator (762, 772) and the drive shaft (730). For this reason, it is possible to reduce the axial length of the rotating system as compared with the case where the gas bearing (780, 782) is provided alone, and thus it is possible to widen the area where the turbo compressor (701) can be operated safely. .
- Embodiment 7 of the Invention will be described.
- the turbo compressor (701) of the present embodiment is different from that of the sixth embodiment in the configuration of the gas bearing. In the following, differences from the sixth embodiment will be mainly described.
- the first hydrostatic gas bearing (784) is fitted in the first recess (766) of the stator (762) of the first bearingless motor (760).
- the first static pressure gas bearing (784) is constituted by a cylindrical sleeve (784) made of a resin having a relatively high thermal conductivity, for example.
- the first hydrostatic gas bearing (784) has an inner peripheral portion made of a porous body (784a) and an outer peripheral portion made of a solid body (784b).
- a first refrigerant cavity (785) is preferably formed over the entire circumference between the inner peripheral portion and the outer peripheral portion.
- the first refrigerant introduction path (786) is connected to the first refrigerant cavity (785) through a through hole that penetrates the outer periphery of the first static pressure gas bearing (784) in the radial direction.
- the first refrigerant introduction path (786) passes through the casing (710) and the coil end portion (764) of the first bearingless motor (760) in the radial direction.
- the first refrigerant introduction path (786) communicates with a condenser included in a refrigerant circuit (not shown) provided with, for example, a turbo compressor (701), and a high-pressure gas refrigerant is provided in the first refrigerant cavity (785). Is introduced.
- first static pressure gas bearing (781) are attached to the outer periphery of the first static pressure gas bearing (784).
- the first static pressure gas bearing (784) is fixed to the first mold resin (765) via the O-ring (781).
- the entire first hydrostatic gas bearing (784) overlaps in the radial direction of the coil end portion (764) and the drive shaft (730).
- the first static pressure gas bearing (784) may partially overlap the coil end portion (764) and the radial direction of the drive shaft (730).
- the second hydrostatic gas bearing (787) is fitted into the second recess (776) of the stator (772) of the second bearingless motor (770). Yes.
- the second static pressure gas bearing (787) is shown reversed from the state of FIG.
- the second hydrostatic gas bearing (787) is constituted by a cylindrical sleeve (787) made of a resin having a relatively high thermal conductivity, for example.
- a 2nd static pressure gas bearing (787) an inner peripheral part is comprised with the porous body (787a), and the outer peripheral part is comprised with the solid body (787b).
- a second refrigerant cavity (788) is preferably formed over the entire periphery.
- the second refrigerant introduction path (789) is connected to the second refrigerant cavity (788) through a through hole that penetrates the outer peripheral portion of the second static pressure gas bearing (787) in the radial direction.
- the second refrigerant introduction path (789) passes through the casing (710) and the coil end portion (774) of the second bearingless motor (770) in the radial direction.
- the second refrigerant introduction path (789) communicates with a condenser included in a refrigerant circuit provided with, for example, a turbo compressor (701), and introduces a high-pressure gas refrigerant into the second refrigerant cavity (788).
- two O-rings (783) are attached to the outer periphery of the second static pressure gas bearing (787).
- the second static pressure gas bearing (787) is fixed to the second mold resin (775) via the O-ring (783).
- the second static pressure gas bearing (787) entirely overlaps the coil end portion (774) and the radial direction of the drive shaft (730).
- the second static pressure gas bearing (787) may partially overlap the coil end portion (774) and the radial direction of the drive shaft (730).
- the first and second static pressure gas bearings (784,787) support the radial load of the drive shaft (730) in a non-contact manner using the pressure of the gas refrigerant introduced into the first and second refrigerant cavities (785,788). To do.
- Embodiment 8 of the Invention >> Embodiment 8 of the present invention will be described.
- FIG. 43 illustrates the configuration of the air-conditioning apparatus (810) of the eighth embodiment.
- the air conditioner (810) includes a refrigerant circuit (811).
- the refrigerant circuit (811) includes a turbo compressor (812), a condenser (813), an expansion valve (814), and an evaporator (815).
- the refrigerant circulates to perform a refrigeration cycle. It is configured to be
- the condenser (813) and the evaporator (815) are constituted by a cross fin type heat exchanger
- the expansion valve (814) is constituted by a motor operated valve.
- FIG. 44 illustrates the configuration of the turbo compressor (812) shown in FIG.
- the turbo compressor (812) is provided in the refrigerant circuit (811) and is configured to compress the refrigerant by an impeller (821) described later.
- the turbo compressor (812) includes a casing (820), an impeller (821), and an electric motor system (830).
- the electric motor system (830) includes a drive shaft (831), first and second bearingless motors (840, 850), a control unit (860), and first and second power supply units (861, 862).
- the electric motor system (830) further includes first and second touchdown bearings (871, 872) and a thrust magnetic bearing (873).
- the “axial direction” means the rotational axis direction, which is the direction of the axis of the drive shaft (831), and the “radial direction” means the drive shaft (831). It is a direction orthogonal to the axial direction.
- the “outer peripheral side” is a side farther from the axis of the drive shaft (831), and the “inner peripheral side” is a side closer to the axis of the drive shaft (831).
- the casing (820) is formed in a cylindrical shape closed at both ends, and is arranged so that the cylinder axis is in a horizontal direction.
- the space in the casing (820) is partitioned by the wall (820a), and the space on the right side of the wall (820a) constitutes the impeller chamber (S801) that houses the impeller (821), and the wall (820a)
- the left-hand space constitutes an electric motor room (S802) that houses the first and second bearingless motors (840, 850).
- the motor chamber (S802) accommodates the first and second bearingless motors (840,850), the first and second touchdown bearings (871,872), and the thrust magnetic bearing (873). It is fixed to the inner wall of the chamber (S802).
- the drive shaft (831) is provided to rotationally drive the load (821) (in this example, the impeller (821)).
- the drive shaft (831) extends in the casing (820) in the axial direction to connect the impeller (821) and the first and second bearingless motors (840, 850).
- the impeller (821) is fixed to one end portion of the drive shaft (831), and the first and second bearingless motors (840, 850) are disposed in the middle portion of the drive shaft (831).
- the other end of the drive shaft (831) (that is, the end opposite to the one end to which the impeller (821) is fixed) is a disc-shaped portion (hereinafter also referred to as a disc portion (831a)).
- the disk part (831a) is made of a magnetic material (for example, iron).
- the impeller (821) is formed by a plurality of blades so that the outer shape is substantially conical, and is housed in the impeller chamber (S801) in a state of being fixed to one end of the drive shaft (831).
- a suction pipe (P801) and a discharge pipe (P802) are connected to the impeller chamber (S801).
- the suction pipe (P801) is provided to guide the refrigerant (fluid) from the outside to the impeller chamber (S801).
- the discharge pipe (P802) is provided to return the high-pressure refrigerant (fluid) compressed in the impeller chamber (S801) to the outside. That is, in this example, the compression mechanism is constituted by the impeller (821) and the impeller chamber (S801).
- the first and second bearingless motors (840, 850) have the same configuration. Therefore, only the configuration of the first bearingless motor (840) will be described here.
- the first bearingless motor (840) has a pair of rotors (841) and a stator (844) to rotate the drive shaft (831) and to contact the radial load of the drive shaft (831) in a non-contact manner. It is configured to support.
- the rotor (841) is fixed to the drive shaft (831), and the stator (844) is fixed to the inner peripheral wall of the casing (820).
- the first bearingless motor (840) is constituted by a concurrent pole type bearingless motor.
- the rotor (841) of the first bearingless motor (840) includes a rotor core (842) and a plurality (four in this example) of permanent magnets (843) embedded in the rotor core (842).
- the rotor core (842) is made of a magnetic material (for example, a laminated steel plate) and is formed in a cylindrical shape.
- a shaft hole for inserting the drive shaft (831) is formed in the central portion of the rotor core (842).
- the plurality of permanent magnets (843) are arranged at a predetermined angular pitch (90 ° angular pitch in this example) in the circumferential direction of the rotor (841).
- the outer peripheral surface side of the four permanent magnets (843) is an N pole, and the outer peripheral surface of the rotor core (842) is between the four permanent magnets (843) in the circumferential direction of the rotor (841).
- the position is pseudo S pole.
- the outer peripheral surface side of the four permanent magnets (843) may be an S pole.
- the stator (844) of the first bearingless motor (840) is made of a magnetic material (for example, laminated steel plate), and includes a back yoke portion (845), a plurality of teeth portions (not shown), and teeth. Armature windings (846a to 846c) and support windings (847a to 847c) wound around the portion.
- the back yoke portion (845) is configured in a cylindrical shape.
- the armature windings (846a to 846c) and the support windings (847a to 847c) are wound around each tooth portion by a distributed winding method.
- the armature windings (846a to 846c) and the support windings (847a to 847c) may be wound around each tooth portion by a concentrated winding method.
- the armature windings (846a to 846c) are windings wound on the inner peripheral side of the tooth portion.
- the armature windings (846a to 846c) include a U-phase armature winding (846a) surrounded by a thick solid line in FIG. 45 and a V-phase armature winding (846b) surrounded by a thick broken line in FIG. ) And a W-phase armature winding (846c) surrounded by a thin solid line in FIG.
- the support windings (847a to 847c) are windings wound around the outer periphery of the tooth portion.
- the support windings (847a to 847c) include a U-phase support winding (847a) surrounded by a thick solid line in FIG. 45, a V-phase support winding (847b) surrounded by a thick broken line in FIG. It is composed of a W-phase support winding (847c) surrounded by a thin solid line in FIG.
- the first touchdown bearing (871) is provided in the vicinity of one end (right end in FIG. 43) of the drive shaft (831), and the second touchdown bearing (872) is the other end of the drive shaft (831). It is provided in the vicinity.
- the first and second touch-down bearings (871, 872) are configured so that the first and second bearingless motors (840, 850) are not energized (that is, when the drive shaft (831) is not lifted). ).
- the thrust magnetic bearing (873) has first and second thrust electromagnets (874a, 874b) and is configured to support the disk portion (831a) of the drive shaft (831) in a non-contact manner by electromagnetic force.
- each of the first and second thrust electromagnets (874a, 874b) is formed in an annular shape, and is opposed to each other with the disk portion (831a) of the drive shaft (831) interposed therebetween.
- the disk portion (831a) of the drive shaft (831) is supported in a non-contact manner by the combined electromagnetic force of the thrust electromagnets (874a, 874b).
- Each part of the electric motor system (830) is provided with various sensors (not shown) such as a position sensor, a current sensor, and a rotation speed sensor.
- the first and second bearingless motors (840, 850) are provided with position sensors (not shown) that output detection signals corresponding to the positions of the rotors (841, 851) in the radial direction (radial direction).
- the magnetic bearing (873) is provided with a position sensor (not shown) that outputs a detection signal corresponding to the position of the drive shaft (831) in the thrust direction (axial direction).
- These position sensors are constituted by, for example, an eddy current displacement sensor that detects a gap (distance) between the position sensor and an object to be measured.
- the control unit (860) controls each part of the electric motor system (830) so that the rotation speed of the drive shaft (831) becomes a predetermined target rotation speed while the drive shaft (831) is supported in a non-contact manner. Based on detection signals from various sensors provided and information such as the target rotational speed of the drive shaft (831), the armature voltage command value, the support voltage command value, and the thrust voltage command value are generated and output. It is configured.
- the armature voltage command value is a command value for controlling the voltage supplied to the armature windings (846a to 846c, 856a to 856c) of the first and second bearingless motors (840, 850).
- the support voltage command value is a command value for controlling the voltage supplied to the support windings (847a to 847c, 857a to 857c) of the first and second bearingless motors (840, 850).
- the thrust voltage command value is a command value for controlling the voltage supplied to the windings (not shown) of the first and second thrust electromagnets (874a, 874b) of the thrust magnetic bearing (873).
- the control unit (860) includes, for example, an arithmetic processing unit such as a CPU, a storage unit such as a memory for storing programs and information for operating the arithmetic processing unit, and the like.
- the first power supply unit (861) is configured to output the armature windings (846a to 846c, 856a to the first and second bearingless motors (840,850)).
- 856c) is configured to supply a voltage.
- the second power source unit (862) supports the support windings (847a to 847c, 857a to 857c) of the first and second bearingless motors (840,850). It is comprised so that a voltage may be supplied to.
- the torque and supporting force generated by the first and second bearingless motors (840, 850) can be controlled by controlling the current flowing through the wires (846a to 846c, 856a to 856c, 847a to 847c, 857a to 857c).
- the first and second power supply units (861, 862) are configured by, for example, a PWM (Pulse Width Modulation) amplifier.
- the first and second power supply units (861, 862) constitute a power supply unit.
- FIG. 7 is a view for explaining an operation region of the turbo compressor (812).
- the horizontal axis represents the refrigerant volume flow rate
- the vertical axis represents the head.
- the turbo compressor (812) can be operated in a predetermined operation region by being supplied with electric power by the first and second power supply units (861, 862).
- This predetermined operation region mainly includes a steady operation region (A), a high load torque region (B) and a turbulence region (C) inside the surge line indicated by bold lines in FIG. 7, and surging outside the surge line.
- Region (D) In the present specification, the high load torque region (B) is also referred to as “region where the maximum driving torque of the turbo compressor (812) is required”. Further, the turbulence region (C) is also referred to as “region in which turning stall occurs”.
- the steady operation region (A) is a region indicated by A in FIG. 7, and rotationally drives the load torque of the impeller (821) and the drive shaft (831) (that is, the impeller (821) and the drive shaft (831)). Torque) is relatively small, and the radial load of the drive shaft (831) is also relatively small.
- the high load torque region (B) is a region indicated by reference numeral B in FIG. 7, where the load torque of the impeller (821) and the drive shaft (831) is relatively large, and the radial load of the drive shaft (831) is also compared. Large area.
- the load torque of the impeller (821) and the drive shaft (831) in the turbo compressor (812) is maximized at the upper right point in FIG. 7 in the high load torque region (B).
- the radial load of the drive shaft (831) in the turbo compressor (812) does not become maximum in the high load torque region (B).
- the turbulence region (C) is a region denoted by reference numeral C in FIG. 7, and the load torque of the impeller (821) and the drive shaft (831) is relatively small, while the radial load of the drive shaft (831) is relatively large. It is an area.
- the surging area (D) is an area indicated by a symbol D in FIG. 7, and the turbo compressor (812) may be temporarily operated in the surging area (D) in an emergency such as a power failure.
- the surging region (D) is a region where the load torque of the impeller (821) and the drive shaft (831) is relatively small, while the radial load of the drive shaft (831) is relatively large. The radial load of the drive shaft (831) in the turbo compressor (812) becomes maximum at a predetermined point in the surging region (D).
- the control unit (860) outputs the armature windings of the first and second bearingless motors (840, 850) so as to output a radial support force for supporting the radial load according to the state of the turbo compressor (812).
- 846a to 846c, 856a to 856c) and the supporting windings (847a to 847c, 857a to 857c) are supplied with an armature current IA and a supporting current IS.
- the radial support force is the radial support force caused by the support current IS and the radial support force caused by both the armature current IA and the support current IS (in this specification, the radial support force caused by the armature current IA It is also a sum.
- the radial support force caused by both the armature current IA and the support current IS increases when the d-axis component (hereinafter, d-axis current) of the armature current IA increases, and decreases when the d-axis current decreases.
- d-axis current the absolute value of the q-axis component
- q-axis current q-axis current
- the control unit (860) causes the armature windings (846a to 846c, 856a to 856c) to generate the torque most efficiently with respect to the armature current IA.
- Controls the power supply (861) (so-called maximum torque / current control), and the support windings (847a to 847c, 857a to 857c) have a radial support force according to the state of the turbo compressor (812).
- the second power supply unit (862) is controlled to output.
- the control method of the first power supply unit (861) in the steady operation region (A) may be other than the maximum torque / current control. For example, maximum efficiency control (control to minimize loss), power factor, etc.
- One control (control in which the power factor is substantially 1) may be employed.
- control unit (860) uses, for example, a voltage applied to the armature windings (846a to 846c, 856a to 856c) of the first and second bearingless motors (840,850) in a region other than the steady operation region (A).
- the first and second power supply units (861, 862) increase one of the armature voltage VA and the support current IS, which is the current flowing through the support windings (847a to 847c, 857a to 857c), and decrease the other. To control. Hereinafter, some examples of such control will be described.
- the control unit (860) for example, includes a turbulence region (C) and a surging region (D) in which the radial torque increases while the load torque is relatively small, at the end of the operation of the turbo compressor (812), and the turbo compressor ( At the time of starting 812), the magnetic flux strengthening control (that is, the control for flowing a positive d-axis current) of the armature windings (846a to 846c, 856a to 856c) is performed.
- the magnetic flux strengthening control that is, the control for flowing a positive d-axis current
- control unit (860) increases the armature voltage command value for the first power supply unit (861) to increase the armature voltage VA in the first and second bearingless motors (840, 850), and the second The support voltage command value for the power supply unit (862) is reduced to reduce the support current IS in the first and second bearingless motors (840, 850). Further, the control unit (860) does not allow the support current IS in the first and second bearingless motors (840, 850) to exceed a predetermined first upper limit value (for example, determined by the power supply capacity of the second power supply unit (862)). In this manner, the first and second power supply units (861, 862) are controlled.
- a predetermined first upper limit value for example, determined by the power supply capacity of the second power supply unit (862)
- the radial support force can be increased by increasing the armature current IA, which is the current flowing through the armature windings (846a to 846c, 856a to 856c), instead of increasing the support current IS. Therefore, the power supply capacity of the second power supply unit (862) can be set relatively small with respect to the maximum radial support force that can be generated by the first and second bearingless motors (840, 850).
- control unit (860) performs strong magnetic flux control with the first power supply unit (861) when the temperature of the support windings (847a to 847c, 857a to 857c) exceeds a predetermined reference value.
- the support current IS may be reduced by the second power supply unit (862).
- control unit (860) for example, the first power supply unit (861) when the rotational speeds of the first and second bearingless motors (840, 850) are relatively small and the armature voltage VA is relatively small.
- the magnetic flux control may be performed at the same time, and the support current IS may be reduced by the second power supply unit (862).
- the armature voltage VA can be increased while maintaining the radial support force, and the controllability of the first and second bearingless motors (840, 850) can be improved by improving the output accuracy of the armature voltage VA. it can.
- the control unit (860) includes a first power supply unit when oil is present in an air gap between the rotor (841,851) and the stator (844,854) in the first and second bearingless motors (840,850).
- the magnetic flux control may be performed at (861), and the support current IS may be reduced at the second power supply unit (862). This increases the copper loss and iron loss in the armature windings (846a to 846c, 856a to 856c), warms the oil in the air gap by the heat generation, and lowers the viscosity of the oil.
- the rotational loss of the two bearingless motor (840, 850) can be reduced.
- the control unit (860) performs the magnetic flux control with the first power supply unit (861) and generates the support current IS with the second power supply unit (862). It may be reduced. Thereby, the copper loss and the iron loss in the armature windings (846a to 846c, 856a to 856c) can be increased, and the refrigerant existing in the motor chamber (S802) can be heated by the generated heat. The heat stored in the refrigerant by the heating is released into the air in the target space in the condenser (813). Therefore, the heating capacity of the air conditioner (810) can be improved.
- the control unit (860) performs the magnetic flux control with the first power supply unit (861) when the demagnetization resistance of the permanent magnets (843, 853) of the first and second bearingless motors (840,850) is small.
- the support current IS may be reduced by the second power supply unit (862).
- the magnetic flux generated by the support current IS may cause demagnetization of the permanent magnets (843, 853).
- such control can make it difficult to cause demagnetization. Therefore, since the permanent magnets (843, 853) having a small coercive force can be used, the cost can be reduced, and at the same time, the design freedom of the first and second bearingless motors (840, 850) can be increased.
- the control unit (860) performs flux-weakening control (that is, control for flowing a negative d-axis current) of the armature windings (846a to 846c, 856a to 856c) in the high-speed operation region.
- the high-speed operation region is a rotation exceeding the rotation speed at which the armature voltage VA reaches a predetermined second upper limit value (for example, determined by the power supply capacity of the first power supply unit (861)) when the flux-weakening control is not performed. This is the area where driving is performed at speed.
- the armature current IA increases when the flux-weakening control is performed compared to when the flux-weakening control is not performed.
- control unit (860) increases the support voltage command value for the second power supply unit (862) to increase the support current IS in the first and second bearingless motors (840, 850), and the first power supply unit.
- the armature voltage command value for (861) is reduced to reduce the armature voltage VA in the first and second bearingless motors (840, 850).
- the control unit (860) controls the first and second power supply units (861, 862) so that the armature voltage VA in the first and second bearingless motors (840, 850) does not exceed the second upper limit value.
- the turbo compressor (812) can be operated in the high speed operation region without increasing the armature voltage VA, and the decrease in the radial support force due to the weakening magnetic flux control can be compensated by the increase in the support current IS. it can. Therefore, the power supply capacity of the first power supply unit (861) can be set relatively small with respect to the width of the operating speed region of the turbo compressor (812).
- control unit (860) may perform the flux weakening control at the time of starting the turbo compressor (812), for example.
- the turbo compressor (812) since the drive shaft (831) is supported by the first and second touchdown bearings (871, 872), the permanent magnets (843,853) of the first and second bearingless motors (840,850) ), A relatively large radial supporting force is required, and the magnetic force of the permanent magnets (843, 853) is artificially weakened by the magnetic flux weakening control to reduce the required radial supporting force. Controllability of the two bearingless motor (840, 850) can be improved.
- control unit (860) performs flux-weakening control when oil is present in the air gap between the rotor (841,851) and the stator (844,854) in the first and second bearingless motors (840,850).
- the supporting current IS may be increased simultaneously. This increases the copper loss in the support windings (847a to 847c, 857a to 857c) and warms the oil in the air gap by the heat generation, thereby lowering the viscosity of the oil, and thus the first and second bearingless motors.
- the rotational loss of (840,850) can be reduced.
- control unit (860) may perform the flux weakening control and increase the support current IS when the air conditioner (810) performs the heating operation.
- the copper loss in the support windings (847a to 847c, 857a to 857c) can be increased, and the refrigerant existing in the motor chamber (S802) can be heated by the generated heat.
- the heat stored in the refrigerant by the heating is released into the air in the target space in the condenser (813). Therefore, the heating capacity of the air conditioner (810) can be improved.
- control unit (860) performs regenerative control (that is, control for causing a negative q-axis current to flow) at the end of the operation in which the radial load increases.
- control unit (860) increases the armature voltage command value for the first power supply unit (861) to increase the armature voltage VA in the first and second bearingless motors (840, 850), and the second The support voltage command value for the power supply unit (862) is reduced to reduce the support current IS in the first and second bearingless motors (840, 850).
- the control unit (860) controls the first and second power supply units (861, 862) so that the support current IS in the first and second bearingless motors (840, 850) does not exceed the first upper limit value.
- the support current IS can be increased, but the armature current IA can be increased to increase the radial support force.
- the power supply capacity of the second power supply unit (862) can be set relatively small with respect to the maximum radial support force that can be generated by the first and second bearingless motors (840, 850). Further, by regenerating the rotational energy, energy saving of the turbo compressor (812) can be achieved, and the time for stopping the rotation can be shortened.
- the control unit (860) controls the first and second bearingless motors (840, 850) while flowing a positive q-axis current in the first power supply unit (861)
- the radial load suddenly increases.
- regenerative control may be performed in which a negative q-axis current having an absolute value larger than the positive q-axis current is passed.
- the radial support force can be increased without increasing the support current IS in the second power supply unit (862).
- the motor system (830) of this embodiment includes an armature voltage VA that is a voltage applied to the armature windings (846a to 846c, 856a to 856c) and a current that flows to the support windings (847a to 847c, 857a to 857c). And a control unit (860) for controlling the first and second power supply units (861, 862) so as to increase one of the supporting current IS and decrease the other. Therefore, by increasing one of the armature voltage VA and the support current IS and decreasing the other, the first and second power supply units (861, 862) according to the operation status of the application to which the motor system (830) is applied.
- the armature voltage VA and the support current IS can be adjusted within the range of each power source capacity. That is, when the power supply capacities of the first power supply unit (861) and the second power supply unit (862) are respectively limited, one power supply is used to obtain a desired output in the first and second bearingless motors (840, 850). When the power supply capacity of the part (861,862) is insufficient, this shortage can be compensated for by the other power supply part (861,862).
- control unit (860) increases the armature voltage VA so as to reduce the support current IS, or increases the support current IS.
- the first and second power supply units (861.862) are controlled so that the armature voltage VA is reduced. According to such control, the operating range of the electric motor system (830) can be expanded.
- the control unit (860) increases the armature voltage VA so that the support current IS does not exceed a predetermined first upper limit value.
- Part (861,862) is controlled. Accordingly, the supporting current IS can be prevented from exceeding the first upper limit value, while the radial supporting force due to the armature current IA that is the current flowing through the armature windings (846a to 846c, 856a to 856c) is increased. Can do. This corresponds to, for example, the case where the strong magnetic flux control is performed by the first power supply unit (861). This is particularly effective when the radial support force is increased with the support current IS reaching the first upper limit value or the vicinity thereof.
- the control unit (860) increases the support current IS so that the armature voltage VA does not exceed a predetermined second upper limit value. Part (861,862) is controlled. Therefore, the armature voltage VA can be prevented from exceeding the second upper limit value.
- the rotational speed of the first and second bearingless motors (840, 850) is increased, for example, the radial bearing force due to the armature current IA is increased. May decrease. This corresponds to, for example, the case where the flux weakening control is performed by the first power supply unit (861).
- the support current IS in the second power supply unit (862) the reduction can be compensated by the radial support force resulting therefrom.
- the control unit (860) causes the armature voltage VA to be decreased by decreasing the armature voltage VA or by increasing the support current IS.
- the first and second power supply units (861, 862) are controlled so that the voltage increases. According to such control, for example, heat generation in the armature windings (846a to 846c, 856a to 856c) or the support windings (847a to 847c, 857a to 857c) can be used as necessary.
- the control unit (860) reduces the armature voltage VA so that the support current IS exceeds a predetermined first lower limit value. (861,862) is controlled. Therefore, the support current IS can exceed the first lower limit value.
- the heat generation in the support windings (847a to 847c, 857a to 857c) can be used as necessary, and the first and second bearingless motors (840,850) can be controlled by improving the detection accuracy of the support current IS. Can be improved.
- the control unit (860) reduces the support current IS so that the armature voltage VA exceeds a predetermined second lower limit value. (861,862) is controlled. Therefore, the armature voltage VA can be made to exceed the second lower limit value.
- the first and second bearingless motors (840,850) can be used by utilizing the heat generated in the armature windings (846a to 846c, 856a to 856c) as necessary, or improving the output accuracy of the armature voltage VA. Controllability can be improved.
- the turbo compressor (812) of the present embodiment includes an electric motor system (830) of the present embodiment, an impeller (821) as a load (821) coupled to the drive shaft (831) of the electric motor system (830), and Is provided. Therefore, in the turbo compressor (812), the impeller (821) is rotationally driven by the first and second bearingless motors (840, 850).
- the turbo compressor (812) of the present embodiment is provided in the refrigerant circuit (811) that performs the refrigeration cycle and is configured to compress the refrigerant by the impeller (821).
- the control unit (860) increases the armature voltage VA so that the support current IS does not exceed the predetermined first upper limit value.
- the second power supply unit (861, 862) is controlled. Therefore, when the required radial support force is large while the load torque of the first and second bearingless motors (840, 850) is small, the radial support force due to the armature current IA can be increased. Therefore, even if the support current IS is suppressed to the first upper limit value or less, the radial support force of the first and second bearingless motors (840, 850) can be increased by increasing the armature current IA.
- the refrigeration apparatus (900) of the present embodiment includes a refrigerant circuit (911) and a water circuit (920) connected to each other, and constitutes an air conditioning equipment.
- the refrigerant circuit (911) is filled with refrigerant
- the water circuit (920) is filled with water (or antifreeze).
- the refrigeration apparatus (900) can perform both cooling and heating of the air-conditioning target space by switching the state of a later-described four-way switching valve (912). Note that the refrigeration apparatus (900) may be dedicated to cooling or heating without the four-way switching valve (912).
- the air-conditioning target space a plurality of rooms partitioned from each other in a specific building (for example, a building or a ship) or a relatively large space in a specific large facility (for example, a dome or a general stadium) Some can be mentioned.
- a specific building for example, a building or a ship
- a relatively large space in a specific large facility for example, a dome or a general stadium
- the number of utilization units (921) provided in the relatively large space can be arbitrarily selected.
- the refrigeration apparatus (900) is preferably configured so that the temperature can be individually adjusted for each air-conditioning target space corresponding to each utilization unit (921).
- the refrigerant circuit (911) is accommodated in the heat source unit (910).
- the refrigerant circuit (911) includes the turbo compressor (101, 210, 410, 601, 701, 812), the four-way switching valve (912), the use side heat exchanger (922), the expansion valve (914) of any of the first to eighth embodiments. And a water / refrigerant heat exchanger (915).
- a heat source side fan (916) for sending air to the heat source side heat exchanger (913) is provided in the vicinity of the heat source side heat exchanger (913).
- the refrigerant circuit (911) includes a turbo compressor (101,210,410,601,701,812), a four-way switching valve (912), a use side heat exchanger (922), an expansion valve (914), and a water / refrigerant heat exchanger (915).
- a turbo compressor 101,210,410,601,701,812
- a four-way switching valve 912
- a use side heat exchanger 922
- a water / refrigerant heat exchanger (915.
- the water circuit (920) is provided for each of the plurality of (three in this example) use side heat exchangers (922) connected in parallel to each other and for each use side heat exchanger (922), It has a flow rate control valve (923) for adjusting the flow rate of water to the use side heat exchanger (922) and a pump (924) for circulating water in the water circuit (920).
- a user side fan (925) for sending air to the user side heat exchanger (922) is provided.
- the use side heat exchanger (922), the flow rate control valve (923), and the use side fan (925) are accommodated in a use unit (921) (for example, a fan coil unit).
- Each utilization unit (921) is arranged in the air conditioning target space.
- the water circuit (920) includes a plurality of usage-side heat exchangers (922), a pump (924), and a water / refrigerant heat exchanger (915) connected to each other by water pipes.
- the fan (925) is operated to perform air conditioning of the air-conditioning target space.
- the refrigeration apparatus (900) can perform heating operation and cooling operation by switching the state of the four-way switching valve (912).
- the state of the four-way switching valve (912) for performing the heating operation is set to the first state (the state indicated by the broken line in FIG. 46), and the state of the four-way switching valve (912) for performing the cooling operation is the first state.
- Two states are assumed.
- the refrigeration system (900) switches the four-way switching valve (912) to the first state and operates the turbo compressor (101,210,410,601,701,812), the heat source side fan (916), the pump (924), and the use side fan (925). By doing so, the heating operation of the air-conditioning target space is performed.
- the water / refrigerant heat exchanger (915) heat is transferred from the high-pressure gas refrigerant discharged from the turbo compressor (101, 210, 410, 601, 701, 812) to the water, and the water that has received the heat is transferred to each use side heat exchanger (922). ),
- the air in the air-conditioned space sent by the user-side fan (925) is heated. Thereby, the air-conditioning target space is heated.
- heat source side heat exchanger (913) heat is transferred from the air (for example, outdoor air) sent by the heat source side fan (916) to the low-pressure liquid refrigerant.
- the refrigeration apparatus (900) switches the four-way switching valve (912) to the second state, and the turbo compressor (101, 210, 410, 601, 701, 812), the heat source side fan (916), the pump (924), and the use side fan (925)
- the air-conditioning target space is cooled by operating the.
- the water / refrigerant heat exchanger (915) the low-pressure liquid refrigerant depressurized by the expansion valve (914) takes heat from the water, and the heat-deprived water is transferred to each use side heat exchanger (922).
- the air in the air-conditioning target space sent by the use side fan (925) is cooled. Thereby, the air-conditioning target space is cooled.
- heat source side heat exchanger (913) heat is transferred from the high-pressure gas refrigerant to the air (for example, outdoor air) sent by the heat source side fan (916).
- the refrigeration apparatus (900) of the present embodiment may operate the turbo compressor (101,210,410,601,701,812) by lowering the refrigeration load in a state where the condensation temperature (that is, the outside air temperature) is relatively high, for example, and the turbo compressor (101,210,410,601,701,812). ) May be operated in the turbulence region (the region indicated by C in FIG. 7). Such operation is typically required in a building having a large number of rooms, such as a building, where only some rooms are required to be air-conditioned (ie, only some usage units (921) are temperature controlled). To be done.
- the turbo compressor (101, 210, 410, 601, 701, 812) can be operated without any problem in the turbulence region (C).
- the heat source unit (910) having the turbo compressor (101, 210, 410, 601, 701, 812) as a whole can be downsized, and the cost of the refrigeration apparatus (900) can be reduced.
- the refrigeration apparatus (900) that provides a plurality of use units (921) and performs air conditioning of a plurality of air-conditioning target spaces even if only some of the use units (921) are in operation,
- the turbo compressor (101,210,410,601,701,812) can be operated without any problem.
- the refrigeration apparatus (900) may constitute, for example, a home air conditioner or a commercial air conditioner in addition to the air conditioning equipment.
- various buildings such as a house, a store, a commercial facility, or a ship can be cited as examples.
- the turbo compressor (101, 210, 410, 601, 701, 812) includes one or two bearingless motors (160, 170, 250, 450, 640, 760, 770, 840, 850), but may include three or more bearingless motors.
- each bearingless motor (160, 170, 250, 450, 640, 760, 770, 840, 850) is a concurrent pole type or embedded magnet type bearingless motor, but the type of each bearingless motor (160, 170, 250, 450, 640, 760, 770, 840, 850) is not limited thereto.
- a bearingless motor such as a surface magnet type (SPM: Surface Permanent Magnet) in which a permanent magnet is attached to the surface of a rotor or an inset type can be used.
- SPM Surface Permanent Magnet
- each bearingless motor (160, 170, 250, 450, 640, 760, 770, 840, 850) is provided with a driving coil (166a to 166c, 176a to 176c, 256a to 256c, 456a to 456c, 646a to 646c) and a supporting coil (167a to 167c, 177a).
- both coils (166a-166c, 176a-176c, 256a-256c, 456a-456c, 646a-646c ,, 167a-167c, 177a- 177c, 257a to 257c, 457a to 457c, and 647a to 647c) may be provided with a common coil.
- the rotor (161,171,251,451,641,761,771,841,851) and the stator (164,174,254,454,644,762,772,844,854) are made of laminated steel sheets, but the rotor (161,171,251,451,641,761,771,841,851) and the stators (4542,644,854), Also good.
- the turbo compressor (101,210,410,601,701,812) includes only one impeller (120,221,421,603a, 720,821), but may include two or more impellers (120,221,421,603a, 720,821).
- one impeller 120, 221, 421, 603a, 720, 821) may be attached to each end of the drive shaft (130, 240, 440, 605, 730, 831).
- a plurality of permanent magnets (163, 173, 253, 453, 643, 843, 853) provided on the rotor (161, 171, 251, 451, 641, 761, 771, 841, 851) of the bearingless motor (160, 170, 250, 450, 640, 760, 770, 840, 850) are exemplified.
- the permanent magnets (163, 173, 253, 453, 643, 843, 853) may have different shapes.
- the present invention is useful for a turbo compressor.
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Power Engineering (AREA)
- Physics & Mathematics (AREA)
- Thermal Sciences (AREA)
- Electromagnetism (AREA)
- Life Sciences & Earth Sciences (AREA)
- Fluid Mechanics (AREA)
- Sustainable Development (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Structures Of Non-Positive Displacement Pumps (AREA)
- Magnetic Bearings And Hydrostatic Bearings (AREA)
- Connection Of Motors, Electrical Generators, Mechanical Devices, And The Like (AREA)
- Other Air-Conditioning Systems (AREA)
- Control Of Positive-Displacement Air Blowers (AREA)
- Sliding-Contact Bearings (AREA)
Abstract
ターボ圧縮機(101, 210, 410, 601, 701, 812)の駆動支持部(160, 170, 180, 250, 260, 450, 460, 621, 640, 760, 770, 780, 782, 784, 787, 840, 850)は、一対の回転子(161,171, 251, 451, 641, 761, 771, 841, 851)と固定子(164,174, 254, 454, 644, 762, 772, 844, 854)を有して駆動軸(130, 240, 440, 605, 730, 831)を回転駆動しかつ駆動軸(130, 240, 440, 605, 730, 831)のラジアル荷重を非接触で支持するベアリングレスモータ(160, 170, 250, 450, 640, 760, 770, 840, 850)を少なくとも1つ有する。これにより、ベアリングレスモータを適用したターボ圧縮機を提供できる。
Description
本発明は、ターボ圧縮機に関するものである。
従来より、インペラと、このインペラに取り付けられた駆動軸とを備えたターボ圧縮機が知られている(例えば、特許文献1)。同文献のターボ圧縮機は、インペラおよび駆動軸を回転駆動するための電動機と、駆動軸のラジアル荷重を電磁力によって非接触で支持する2つのラジアル磁気軸受と、駆動軸の軸方向位置を電磁力によって非接触で制御する1つのスラスト磁気軸受とを備えている。2つのラジアル磁気軸受は、電動機の両側に1つずつ配置されている。
一方で、近年、「磁気軸受機能を磁気的に一体化したモータ」として定義されるベアリングレスモータが研究および実用化されてきている(例えば、特許文献2)。このベアリングレスモータは、例えば補助人工心臓などに応用されている。
ところで、上述の補助人工心臓などの用途では、作動流体が気体よりも圧縮性の小さい液体であるため、いわゆるサージング現象が発生しにくい。ベアリングレスモータの実用化は、これまでこのようなサージング現象の発生しにくい用途に限られていた。そして、空調用のターボ圧縮機のように、作動流体が気体(ガス冷媒)であってサージング現象を生じ得る運転領域で運転されるものにベアリングレスモータを適用して実用化した例はこれまでのところ見当たらない。
本発明は、かかる点に鑑みてなされたものであり、その目的は、ベアリングレスモータを適用したターボ圧縮機を提供することにある。
本開示の第1の態様は、冷凍サイクルを行う冷媒回路に設けられて冷媒を圧縮するターボ圧縮機(101,210,410,601,701,812)を対象とする。このターボ圧縮機(101,210,410,601,701,812)は、インペラ(120,221,421,603a,720,821)と、駆動軸(130,240,440,605,730,831)と、所定の電流範囲内の電流が流れることによって生じる電磁力により上記駆動軸(130,240,440,605,730,831)を回転駆動しかつ上記駆動軸(130,240,440,605,730,831)のラジアル荷重を非接触で支持する駆動支持部(160,170,180,250,260,450,460,621,640,760,770,780,782,784,787,840,850)とを備え、上記駆動支持部(160,170,180,250,260,450,460,621,640,760,770,780,782, 784,787,840,850)は、一対の回転子(161,171,251,451,641,761,771,841,851)と固定子(164,174,254,454,644,762,772,844,854)を有して上記駆動軸(130,240,440,605,730,831)を回転駆動しかつ上記駆動軸(130,240,440,605,730,831)のラジアル荷重を非接触で支持するベアリングレスモータ(160,170,250,450,640,760,770,840,850)を少なくとも1つ有する。
上記第1の態様では、ベアリングレスモータ(160,170,250,450,640,760,770,840,850)において、インペラ(120,221,421,603a,720,821)および駆動軸(130,240,440,605,730,831)を回転駆動するために大きな駆動トルクを生じさせる必要がないときは、その回転子(161,171,251,451,641,761,771,841,851)および固定子(164,174,254,454,644,762,772,844,854)によって形成される磁気回路を、駆動軸(130,240,440,605,730,831)のラジアル荷重を支持するための支持力を生じさせるために有効活用することができる。一方、第1の態様では、ベアリングレスモータ(160,170,250,450,640,760,770,840,850)において、駆動軸(130,240,440,605,730,831)のラジアル荷重を支持するために大きな支持力を生じさせる必要がないときは、その回転子(161,171,251,451,641,761,771,841,851)および固定子(164,174,254,454,644,762,772,844,854)によって形成される磁気回路を、インペラ(120,221,421,603a,720,821)および駆動軸(130,240,440,605,730,831)を回転駆動するために有効活用することができる。
本開示の第2の態様は、上記第1の態様において、上記インペラ(120)および上記駆動軸(130)を回転駆動するために上記駆動支持部(160,170,180)で生じる磁束を駆動用磁束BMとし、上記駆動軸(130)のラジアル荷重を支持するために上記駆動支持部(160,170,180)で生じる磁束を支持用磁束BSとして、上記駆動支持部(160,170,180)に電流を流すための電源部(191)と、上記ターボ圧縮機(101)を旋回失速が生じる領域およびサージング領域で運転する際には、同一回転速度で比較したとき、通常運転時に比べて、上記駆動用磁束BMを発生させるための電流IMに対する上記支持用磁束BSを発生させるための電流ISの割合を増加させるように上記電源部(191)を制御する制御部(190)とを備えていることを特徴とする。
上記第2の態様は、同一回転速度で比較したときに、旋回失速が生じる領域およびサージング領域では通常運転時よりも駆動軸(130)のラジアル荷重が大きくなることに対応するものである。すなわち、旋回失速が生じる領域およびサージング領域でターボ圧縮機(101)を運転する際に、駆動用磁束BMを発生させるための電流IMに対する支持用磁束BSを発生させるための電流ISの割合を、通常運転時に比べて増加させる。これにより、旋回失速が生じる領域およびサージング領域でもターボ圧縮機(101)が問題なく運転され得る。
本開示の第3の態様は、上記第1の態様において、上記インペラ(120)および上記駆動軸(130)を回転駆動するために上記駆動支持部(160,170,180)で生じる磁束を駆動用磁束BMとし、上記駆動軸(130)のラジアル荷重を支持するために上記駆動支持部(160,170,180)で生じる磁束を支持用磁束BSとして、上記駆動支持部(160,170,180)に電流を流すための電源部(191)と、上記ターボ圧縮機(101)を旋回失速が生じる領域およびサージング領域で運転する場合に冷媒体積流量が減るにつれて、同一回転速度で比較したとき、上記駆動用磁束BMを発生させるための電流IMに対する上記支持用磁束BSを発生させるための電流ISの割合を増加させていくように上記電源部(191)を制御する制御部(190)とを備えていることを特徴とする。
上記第3の態様では、ターボ圧縮機(101)を旋回失速が生じる領域およびサージング領域で運転する場合に冷媒体積流量が減るにつれて、同一回転速度で比較すると、冷媒体積流量の減少に伴って駆動軸(130)のラジアル荷重が大きくなることに対応するものである。すなわち、ターボ圧縮機(101)を旋回失速が生じる領域およびサージング領域で運転する場合に冷媒体積流量が減るにつれて、同一回転速度で比較したとき、駆動用磁束BMを発生させるための電流IMに対する支持用磁束BSを発生させるための電流ISの割合を増加させていく。これにより、旋回失速が生じる領域およびサージング領域でもターボ圧縮機(101)が問題なく運転され得る。
本開示の第4の態様は、上記第1の態様において、上記インペラ(120)および上記駆動軸(130)を回転駆動するために上記駆動支持部(160,170,180)で生じる磁束を駆動用磁束BMとし、上記駆動軸(130)のラジアル荷重を支持するために上記駆動支持部(160,170,180)で生じる磁束を支持用磁束BSとし、上記ターボ圧縮機(101)の所定の運転領域における上記駆動用磁束BMと上記支持用磁束BSとの和の最大値を(BM+BS)maxとし、上記所定の運転領域における最大トルク負荷に対応する駆動トルクを発生させるために上記駆動支持部(160,170,180)で生じる磁束をBMmaxとし、上記所定の運転領域における上記駆動軸(130)の最大ラジアル荷重を支持するために上記駆動支持部(160,170,180)で生じる磁束をBSmaxとし、上記駆動支持部(160,170,180)に流れる電流が上記所定の電流範囲の上限値であるときに該駆動支持部(160,170,180)で生じる磁束をBmaxとしたときに、上記駆動支持部(160,170,180)は、(BM+BS)max≦Bmax<BMmax+BSmaxの関係が成り立つように構成されていることを特徴とする。
ここで、駆動支持部(160,170,180)において最大駆動トルクおよび最大ラジアル荷重支持力との両方を同時に発生可能にするという通常の考え方にしたがうと、駆動支持部(160,170,180)に流れる電流が所定の電流範囲の上限値であるときに当該駆動支持部(160,170,180)で生じる磁束BmaxがBMmax+BSmaxに一致する(Bmax=BMmax+BSmax)ように駆動支持部(160,170,180)を構成することになる。
これに対し、上記第4の態様では、駆動支持部(160,170,180)に流れる電流が所定の電流範囲の上限値であるときに当該駆動支持部(160,170,180)で生じる磁束Bmaxが、(BM+BS)max以上であってBMmax+BSmax未満となる((BM+BS)max≦Bmax<BMmax+BSmax)ように駆動支持部(160,170,180)を構成する。これにより、例えば、通常の考え方にしたがって駆動支持部(160,170,180)を構成する場合に比べて、ベアリングレスモータ(160,170)の固定子(164,174)および回転子(161,171)を小型化することが可能となる。
このことは、冷凍装置用のターボ圧縮機(101)において、最大駆動トルクが必要となる運転領域(すなわち、負荷トルクが最大となる領域)と、最大ラジアル荷重支持力が必要となる運転領域(すなわち、駆動軸(130)のラジアル荷重が最大となる領域)とが互いに異なるという事実を本願発明者が発見したことに基づく。つまり、駆動支持部(160,170,180)において最大駆動トルクと最大ラジアル荷重支持力との両方を同時に発生させる必要がないため、上記第4の態様によれば、(BM+BS)max≦Bmax<BMmax+BSmaxという関係が成立するように駆動支持部(160,170,180)を構成することによって、ターボ圧縮機(101)の機能と信頼性を損なうことなく当該駆動支持部(160,170,180)を小型化することができる。
本開示の第5の態様は、上記第1の態様において、上記駆動支持部(160,170,180)は、上記所定の電流範囲内の電流が流れるコイル(166a~166c,167a~167c,176a~176c,177a~177c,184)を有し、上記インペラ(120)および上記駆動軸(130)を回転駆動するために上記駆動支持部(160,170,180)で生じる磁束を駆動用磁束BMとし、上記駆動軸(130)のラジアル荷重を支持するために上記駆動支持部(160,170,180)で生じる磁束を支持用磁束BSとし、上記ターボ圧縮機(101)の所定の運転領域に最大トルク負荷に対応する駆動トルクを発生させるときに上記駆動支持部(160,170,180)で生じる磁束をBMmaxとし、かつそのときに上記コイル(166a~166c,167a~167c,176a~176c,177a~177c,184)に流れる電流を最大トルク電流IBMmaxとし、上記所定の運転領域における上記駆動軸(130)の最大ラジアル荷重を支持するときに上記駆動支持部(160,170,180)で生じる磁束をBSmaxとし、かつそのときに上記コイル(166a~166c,167a~167c,176a~176c,177a~177c,184)に流れる電流を最大支持力電流IBSmaxとし、上記最大トルク電流IBMmaxと上記最大支持力電流IBSmaxとを足し合わせた電流を上記コイル(166a~166c,167a~167c,176a~176c,177a~177c,184)に流すことによって上記駆動支持部(160,170,180)で生じる磁束をBMSmaxとしたときに、上記駆動支持部(160,170,180)は、BMSmax<BMmax+BSmaxの関係が成り立つように構成されていることを特徴とする。
ここで、駆動支持部(160,170,180)において最大負荷トルクおよび最大ラジアル荷重支持力との両方を同時に発生可能にするという通常の考え方にしたがうと、最大トルク電流IBMmaxと最大支持力電流IBSmaxとを足し合わせた電流をコイル(166a~166c,167a~167c,176a~176c,177a~177c,184)に流すことによって駆動支持部(160,170,180)で生じる磁束BMSmaxがBMmax+BSmaxに一致する(BMSmax=BMmax+BSmax)ように駆動支持部(160,170,180)を構成することになる。
これに対し、上記第5の態様では、最大トルク電流IBMmaxと最大支持力電流IBSmaxとを足し合わせた電流をコイル(166a~166c,167a~167c,176a~176c,177a~177c,184)に流すことによって駆動支持部(160,170,180)で生じる磁束BMSmaxがBMmax+BSmax未満となる(BMSmax<BMmax+BSmax)ように駆動支持部(160,170,180)を構成する。これにより、例えば、通常の考え方にしたがって駆動支持部(160,170,180)を構成する場合に比べて、ベアリングレスモータ(160,170)の固定子(164,174)および回転子(161,171)を小型化することが可能となる。
このことは、冷凍装置用のターボ圧縮機(101)において、最大駆動トルクが必要となる運転領域と、最大ラジアル荷重支持力が必要となる運転領域とが互いに異なるという事実を本願発明者が発見したことに基づく。つまり、駆動支持部(160,170,180)において最大駆動トルクと最大ラジアル荷重支持力との両方を同時に発生させる必要がないため、上記第5の態様によれば、BMSmax<BMmax+BSmaxという関係が成立するように駆動支持部(160,170,180)を構成することによって、ターボ圧縮機(101)の機能と信頼性を損なうことなく当該駆動支持部(160,170,180)を小型化することができる。
本開示の第6の態様は、上記第1の態様において、上記駆動支持部(160,170,180)に電流を流すための電源部(191)と、サージング領域で運転する場合または上記駆動軸(130)の回転運動を通常停止させる場合に、上記駆動支持部(160,170,180)に駆動トルクに寄与する電流を流さずに上記駆動軸(130)のラジアル荷重を非接触で支持するための電流のみを流すように上記電源部(191)を制御する制御部(190)とを備えていることを特徴とする。
上記第6の態様では、サージング領域で運転する場合または駆動軸(130)の回転運動を通常停止させる場合(すなわち、トルクの発生を要しない場合)に、駆動支持部(160,170,180)に駆動軸(130)のラジアル荷重を支持するための電流のみを流す。これにより、上記の場合においてターボ圧縮機(101)を効率良く運転することができる。
本開示の第7の態様は、上記第1~第6の態様のいずれか1つにおいて、上記駆動支持部(160,170,180)は、上記ベアリングレスモータ(160,170)のみで構成されていることを特徴とする。
上記第7の態様では、ベアリングレスモータ(160,170)のみによって駆動軸(130)のラジアル荷重が非接触で支持される。
本開示の第8の態様は、上記第1~第6の態様のいずれか1つにおいて、上記駆動支持部(160,170,180)は、上記ベアリングレスモータ(160,170)と、上記駆動軸(130)の軸方向において上記ベアリングレスモータ(160,170)と並んで配置され、複数の電磁石を有して上記駆動軸(130)のラジアル荷重を非接触で支持する磁気軸受(180)とで構成されていることを特徴とする。
上記第8の態様では、ベアリングレスモータ(160,170)および磁気軸受(180)によって駆動軸(130)のラジアル荷重が非接触で支持される。
本開示の第9の態様は、上記第8の態様において、上記磁気軸受(260)は、上記駆動軸(240)の軸方向において、上記ベアリングレスモータ(250)において支持されるラジアル荷重よりも大きいラジアル荷重が作用する位置に配置されていることを特徴とする。
上記第9の態様では、磁気軸受(260)において支持されるラジアル荷重は、ベアリングレスモータ(250)において支持されるラジアル荷重よりも大きくなっている。すなわち、駆動軸(240)のラジアル荷重が比較的に大きくなる位置に磁気軸受(260)が配置され、駆動軸(240)のラジアル荷重が比較的に小さくなる位置にベアリングレスモータ(250)が配置されている。なお、ベアリングレスモータ(250)では、電磁力を支持力(駆動軸(240)を非接触で支持するための力)と駆動力(駆動軸(240)を回転駆動させるための力)とに割り当てることになるが、磁気軸受(260)では、電磁力を全て支持力に割り当てることが可能である。そのため、磁気軸受(260)は、ベアリングレスモータ(250)よりも大きな支持力を発生させることが可能である。
本開示の第10の態様は、上記第9の態様において、上記駆動軸(240)の一端部に上記インペラ(220)が接続され、上記磁気軸受(260)は、上記駆動軸(240)の軸方向において上記ベアリングレスモータ(250)よりも上記インペラ(220)に近い位置に配置されていることを特徴とする。
上記第10の態様では、駆動軸(240)の軸方向における位置が駆動軸(240)の一端部(すなわちインペラ(220))に近くなるに連れて、その位置における駆動軸(240)のラジアル荷重が大きくなる傾向にある。したがって、駆動軸(240)の軸方向においてベアリングレスモータ(250)よりもインペラ(220)に近い位置に磁気軸受(260)を配置することにより、駆動軸(240)のラジアル荷重が比較的に大きくなる位置に磁気軸受(260)を配置し、駆動軸(240)のラジアル荷重が比較的に小さくなる位置にベアリングレスモータ(250)を配置することができる。
本開示の第11の態様は、上記第9または第10の態様において、上記ベアリングレスモータ(250)は、表面磁石型のベアリングレスモータによって構成されていることを特徴とする。
上記第11の態様では、ベアリングレスモータ(250)は、表面磁石型のベアリングレスモータによって構成されている。なお、表面磁石型のベアリングレスモータ(250)における永久磁石(253)の数は、コンセクエントポール型のベアリングレスモータ(250)における永久磁石(253)の数よりも多くなっている。そのため、表面磁石型のベアリングレスモータ(250)は、コンセクエントポール型のベアリングレスモータ(250)よりも、磁石磁束φ1の磁束密度が高くなっている。したがって、表面磁石型のベアリングレスモータ(250)は、コンセクエントポール型のベアリングレスモータ(250)よりも、大きな駆動トルク(T1)を発生させることができる。
本開示の第12の態様は、上記第8の態様において、上記ベアリングレスモータ(450)は、上記駆動軸(440)の軸方向において、上記磁気軸受(460)において支持されるラジアル荷重よりも大きいラジアル荷重が作用する位置に配置されていることを特徴とする。
上記第12の態様では、駆動軸(440)のラジアル荷重が比較的に大きくなる位置にベアリングレスモータ(450)が配置され、駆動軸(440)のラジアル荷重が比較的に小さくなる位置に磁気軸受(460)が配置されている。すなわち、磁気軸受(460)は、ベアリングレスモータ(450)において支持されるラジアル荷重よりも小さいラジアル荷重が作用する位置に配置されている。なお、磁気軸受(460)において発生する電磁力は、磁気軸受(460)のサイズ(特に軸長やロータ径)に依存しており、磁気軸受(460)のサイズが大きくなるほど磁気軸受(460)において発生する電磁力が大きくなる傾向にある。そのため、ベアリングレスモータ(450)において支持されるラジアル荷重よりも小さいラジアル荷重が作用する位置に磁気軸受(460)を配置することにより、ベアリングレスモータ(450)において支持されるラジアル荷重よりも大きいラジアル荷重が作用する位置に磁気軸受(460)を配置する場合よりも、磁気軸受(460)のサイズ(特に軸長やロータ径)を小さくすることができる。
また、冷媒回路(510)に設けられて冷媒を圧縮するターボ圧縮機(410)では、駆動軸(440)の負荷トルク(駆動軸(440)を回転駆動させるために必要となるトルク)が最大となる運転領域と駆動軸(440)のラジアル荷重が最大となる運転領域とが互いに異なり、駆動軸(440)のラジアル荷重が比較的に大きくなる運転領域(特に駆動軸(440)のラジアル荷重が最大となる運転領域)では、駆動軸(440)の負荷トルクが比較的に小さくなる。そのため、駆動軸(440)のラジアル荷重が比較的に大きくなる運転領域では、ベアリングレスモータ(450)の電磁力を支持力(駆動軸(440)を非接触で支持するための力)に十分に割り当てることができる。
本開示の第13の態様は、上記第12の態様において、上記駆動軸(440)の一端部に上記インペラ(421)が接続され、上記ベアリングレスモータ(450)は、上記駆動軸(440)の軸方向において上記磁気軸受(460)よりも上記インペラ(421)に近い位置に配置されていることを特徴とする。
上記第13の態様では、駆動軸(440)の軸方向における位置が駆動軸(440)の一端部(すなわちインペラ(421))に近くなるに連れて、その位置における駆動軸(440)のラジアル荷重が大きくなる傾向にある。したがって、駆動軸(440)の軸方向においてラジアル磁気軸受(460)よりもインペラ(421)に近い位置にベアリングレスモータ(450)を配置することにより、駆動軸(440)の一端部にインペラ(421)が接続されたターボ圧縮機(410)において、駆動軸(440)のラジアル荷重が比較的に大きくなる位置にベアリングレスモータ(450)を配置し、駆動軸(440)のラジアル荷重が比較的に小さくなる位置にラジアル磁気軸受(460)を配置することができる。
本開示の第14の態様は、上記第12または第13の態様において、上記ベアリングレスモータ(450)は、コンセクエントポール型のベアリングレスモータまたは埋込磁石型のベアリングレスモータによって構成されていることを特徴とする。
上記第14の態様では、コンセクエントポール型のベアリングレスモータ(450)は、表面磁石型のベアリングレスモータ(450)よりも、支持用磁束BS1の磁路における磁気抵抗が低くなっている。そのため、コンセクエントポール型のベアリングレスモータ(450)は、表面磁石型のベアリングレスモータ(450)よりも大きな支力を発生させることができる。また、埋込磁石型のベアリングレスモータ(450)は、表面磁石型のベアリングレスモータ(450)よりも、支持用磁束BS1の磁路における磁気抵抗が低くなっている。そのため、埋込磁石型のベアリングレスモータ(450)は、表面磁石型のベアリングレスモータ(450)よりも大きな支持力を発生させることができる。
本開示の第15の態様は、上記第8の態様において、上記磁気軸受(621)は、上記ベアリングレスモータ(640)の軸方向両側にそれぞれ配置され、かつ上記複数の電磁石(671~678)によって上記駆動軸(605)に合成電磁力(F)を付与するように構成されており、それぞれの磁気軸受(621)は、互いに逆位相の合成電磁力(F)を発生させることを特徴とする。
上記第15の態様では、2つの磁気軸受(621)がベアリングレスモータ(640)の両側に配置されて、逆位相の電磁力を駆動軸(605)に加える。すなわち、これらの磁気軸受(621)は、駆動軸(605)のチルト方向に対して電磁力を作用させる。また、ベアリングレスモータ(640)によって、ラジアル方向の荷重を支持することができる。こうすることで、磁気軸受(621)で分担するラジアル方向の荷重を小さくでき、その結果、磁気軸受(621)の小型化が可能になる。
本開示の第16の態様は、上記第15の態様において、一方の磁気軸受(621)のそれぞれの電磁石(671~678)は、当該電磁石(671~678)とは逆位相の電磁力を他方の磁気軸受(621)において発生させる電磁石(671~678)と結線されていることを特徴とする。
上記第16の態様では、制御器が1つあれば、2つの磁気軸受(621)を同時に制御することが可能になる。
本開示の第17の態様は、上記第15または第16の態様において、上記ベアリングレスモータ(640)で並進方向の変位を制御し、上記磁気軸受(621)でチルト方向の変位を制御することを特徴とする。
本開示の第18の態様は、上記第17の態様において、上記ベアリングレスモータ(640)用の制御器と、上記磁気軸受(621)用の制御器を個別に有することを特徴とする。
本開示の第19の態様は、上記第15~第18の態様のいずれか1つにおいて、上記インペラ(603a)により近い磁気軸受(621)の方が、もう一方の磁気軸受(621)よりも大きな上記合成電磁力(F)を発生するように、各電磁石(671~678)の巻線の巻数、各巻線に流す電流の大きさ、磁気回路の磁気抵抗、電磁石のサイズが設定されていることを特徴とする。
本開示の第20の態様は、上記第19の態様において、上記インペラ(603a)により近い方の磁気軸受(621)が有する各電磁石(671~678)の方が、もう一方の磁気軸受(621)が有する各電磁石(671~678)よりも巻線の巻数が多いことを特徴とする。
上記第20の態様では、コイル(665)の巻数によって磁気軸受(621)の合成電磁力(F)が調整される。
本開示の第21の態様は、上記第19または第20の態様において、上記インペラ(603a)により近い磁気軸受(621)の方が、もう一方の磁気軸受(621)よりも、軸方向長さが長いことを特徴とする。
上記第21の態様では、磁気軸受(621)の軸方向長さによって磁気軸受(621)の合成電磁力(F)が調整される。
本開示の第22の態様は、上記第19~第21の態様のいずれか1つにおいて、上記駆動軸(605)は、上記インペラ(603a)により近い方の磁気軸受(621)に面する部分の方が、もう一方の磁気軸受(621)に面する部分よりも直径が大きいことを特徴とする。
上記第22の態様では、駆動軸(605)が磁気軸受(621)に面する部分の直径によって磁気軸受(621)の合成電磁力(F)が調整される。
本開示の第23の態様は、上記第1~第22の態様のいずれか1つにおいて、上記駆動支持部(760,770,780,782,784,787)は、上記ベアリングレスモータ(760,770)に組み込まれて上記駆動軸(730)のラジアル荷重を非接触で支持する気体軸受(780,782,784,787)を有することを特徴とする。
上記第23の態様では、ベアリングレスモータ(760,770)および気体軸受(780,782,784,787)によって駆動軸(730)のラジアル荷重が非接触で支持される。このため、ベアリングレスモータ(760,770)のみで駆動軸(730)のラジアル荷重を支持する場合に比べて、ベアリングレスモータ(760,770)が受け持つラジアル荷重が減少し、その減少分に対応してベアリングレスモータ(760,770)の駆動トルク出力を高めることが可能となる。また、気体軸受(780,782,784,787)はベアリングレスモータ(760,770)に組み込まれているので、気体軸受(780,782,784,787)を単体で設ける場合に比べて回転系を小型化することができる。したがって、ターボ圧縮機(701)を安全に運転可能な領域を広げることができる。
本開示の第24の態様は、上記第23の態様において、上記ベアリングレスモータ(760,770)は、上記所定の電流範囲内の電流が流れるコイル(763,773)が巻回された固定子(762,772)を有し、上記気体軸受(780,782,784,787)の少なくとも一部は、上記固定子(762,772)のコイルエンド部(764,774)と上記駆動軸(730)の径方向に重なっていることを特徴とする。
上記第24の態様では、気体軸受(780,782,784,787)の少なくとも一部がコイルエンド部(764,774)と駆動軸(730)の径方向に重なっていることによって、当該気体軸受(780,782,784,787)およびベアリングレスモータ(760,770)ならびに駆動軸(730)を含む回転系の全体的な小型化が図られる。
本開示の第25の態様は、上記第24の態様において、上記気体軸受(780,782,784,787)は、上記コイルエンド部(764,774)のモールド樹脂(765,775)に嵌め込まれたスリーブ(780,782,784,787)によって構成されていることを特徴とする。
本開示の第26の態様は、上記第23~第25の態様のいずれか1つにおいて、上記気体軸受(780,782)は、動圧気体軸受であることを特徴とする。
本開示の第27の態様は、上記第23~第25の態様のいずれか1つにおいて、上記気体軸受(784,787)は、静圧気体軸受であることを特徴とする。
本開示の第28の態様は、上記第1~第27の態様のいずれか1つにおいて、ベアリングレスモータ(840,850)の上記固定子(844,854)に設けられた電機子巻線(846a~846c,856a~856c)および支持巻線(847a~847c,857a~857c)と、上記電機子巻線(846a~846c,856a~856c)および上記支持巻線(847a~847c,857a~857c)に電圧を印加するための電源部(861,862)と、上記電機子巻線(846a~846c,856a~856c)にかかる電圧である電機子電圧VAと、上記支持巻線(847a~847c,857a~857c)に流れる電流である支持電流ISとの一方を増大させかつ他方を低減させるように、上記電源部(861,862)を制御する制御部(860)とを備えることを特徴とする。
上記第28の態様では、電機子電圧VAと支持電流ISの一方を増大させかつ他方を低減させることにより、ターボ圧縮機(812)の動作状況に応じて、電源部(861,862)の電源容量の範囲内で電機子電圧VAおよび支持電流ISを調節することができる。
本開示の第29の態様は、上記第28の態様において、上記制御部(860)は、上記電機子電圧VAを増大させて上記支持電流ISが低減するように、または、上記支持電流ISを増大させて上記電機子電圧VAが低減するように、上記電源部(861,862)を制御することを特徴とする。
上記第29の態様では、ラジアル支持力を維持しつつ、支持電流ISまたは電機子電圧VAを低減させることができる。
本開示の第30の態様は、上記第28または第29の態様において、上記制御部(860)は、上記電機子電圧VAを増大させて上記支持電流ISが所定の第1上限値を超えないように、上記電源部(861,862)を制御することを特徴とする。
上記第30の態様では、支持電流ISが第1上限値を超えないようにできる一方、電機子巻線(846a~846c,856a~856c)に流れる電流である電機子電流IAに起因するラジアル支持力を増大させることができる。支持電流ISが第1上限値またはその近傍に達した状態でラジアル支持力を増大させる場合に特に効果的である。
本開示の第31の態様は、上記第28~第30の態様のいずれか1つにおいて、上記制御部(860)は、上記支持電流ISを増大させて上記電機子電圧VAが所定の第2上限値を超えないように、上記電源部(861,862)を制御することを特徴とする。
上記第31の態様では、電機子電圧VAが第2上限値を超えないようにできるが、例えばベアリングレスモータ(840,850)の回転速度を上昇させていくと電機子電流IAに起因するラジアル支持力が低下するおそれがある。これに対し、支持電流ISを増大させることによってそれに起因するラジアル支持力で当該低下を補うことができる。
本開示の第32の態様は、上記第28~第31の態様のいずれか1つにおいて、上記制御部(860)は、上記電機子電圧VAを低減させて上記支持電流ISが増大するように、または、上記支持電流ISを低減させて上記電機子電圧VAが増大するように、上記電源部(861,862)を制御することを特徴とする。
上記第32の態様では、ラジアル支持力を維持しつつ、支持電流ISまたは電機子電圧VAを増大させることができる。
本開示の第33の態様は、上記第28~第32の態様のいずれか1つにおいて、上記制御部(860)は、上記電機子電圧VAを低減させて上記支持電流ISが所定の第1下限値を超えるように、上記電源部(861,862)を制御することを特徴とする。
上記第33の態様では、支持電流ISが第1下限値を超えるようにすることができる。これにより、例えば、支持巻線(847a~847c,857a~857c)における発熱を必要に応じて利用することができる。
本開示の第34の態様は、上記第28~33の態様のいずれか1つにおいて、上記制御部(860)は、上記支持電流ISを低減させて上記電機子電圧VAが所定の第2下限値を超えるように、上記電源部(861,862)を制御することを特徴とする。
上記第34の態様では、電機子電圧VAが第2下限値を超えるようにすることができる。これにより、例えば、電機子巻線(846a~846c,856a~856c)における発熱を必要に応じて利用することができる。
本開示の第35の態様は、上記第28~第34の態様のいずれか1つにおいて、上記ターボ圧縮機(812)は、冷凍サイクルを行う冷媒回路(811)に設けられて上記インペラ(821)によって冷媒を圧縮するように構成され、上記ターボ圧縮機(812)を旋回失速が生じる領域またはサージング領域で運転する場合、上記制御部(860)は、上記電機子電圧VAを増大させて上記支持電流ISが所定の第1上限値を超えないように、上記電源部(861,862)を制御することを特徴とする。
上記第35の態様では、旋回失速が生じる領域(C)またはサージング領域(D)でターボ圧縮機(812)を運転する場合、すなわちベアリングレスモータ(840,850)の負荷トルクが小さい一方で必要なラジアル支持力が大きい場合に、電機子電流IAに起因するラジアル支持力を増大させることができる。したがって、支持電流ISを第1上限値以下に抑制していても、電機子電流IAの増大によってベアリングレスモータ(840,850)のラジアル支持力を増大させることができる。
本開示の第36の態様は、冷凍装置(900)を対象とする。この冷凍装置(900)は、上記第1~第35の態様のいずれか1つに係るターボ圧縮機(101,210,410,601,701,812)を有する熱源ユニット(910)と、利用ユニット(921)とを備える。
上記第36の態様では、熱源ユニット(910)のターボ圧縮機(101,210,410,601,701,812)を運転することで、例えば、利用ユニット(921)が設けられた空間の空気調和が行われる。
本開示の第37の態様は、上記第36の態様において、上記利用ユニット(921)は、複数台設けられ、複数台の上記利用ユニット(921)は、複数の空調対象空間の空気調和を行うことを特徴とする。
上記第37の態様では、複数台の利用ユニット(921)によって複数の空調対象空間の空気調和が行われる。
上記第1の態様によれば、少なくとも1つのベアリングレスモータを含む駆動支持部を備えたターボ圧縮機を提供することができる。
また、上記第2および第3の態様によれば、旋回失速が生じる領域およびサージング領域でもターボ圧縮機を問題なく運転することが可能となる。
また、上記第4および第5の態様によれば、例えば、通常の考え方にしたがって駆動支持部を構成する場合に比べて、ベアリングレスモータの固定子および回転子を小型化することが可能となる。
また、上記第6の態様によれば、サージング領域で運転する場合または駆動軸の回転運動を通常停止させる場合に、ターボ圧縮機を効率良く運転することができる。
また、上記第9の態様によれば、ベアリングレスモータと磁気軸受とを用いて駆動軸の回転駆動および非接触支持を行うことにより、ベアリングレスモータの代わりに駆動軸の回転駆動のみを行うモータと駆動軸の非接触支持のみを行う磁気軸受とが設けられている場合よりも、駆動支持部を小型化することができる。
また、上記第9の態様によれば、磁気軸受は、ベアリングレスモータよりも大きな支持力を発生させることが可能であるので、駆動軸のラジアル荷重が比較的に大きくなる位置にラジアル磁気軸受を配置し、駆動軸のラジアル荷重が比較的に小さくなる位置にベアリングレスモータを配置することにより、駆動軸の支持力(駆動軸を非接触で支持するための力)を確保することができる。
また、上記第10の態様によれば、駆動軸の軸方向においてベアリングレスモータよりもインペラに近い位置に磁気軸受を配置することにより、駆動軸の一端部にインペラが接続されたターボ圧縮機において、駆動軸のラジアル荷重が比較的に大きくなる位置に磁気軸受を配置し、駆動軸のラジアル荷重が比較的に小さくなる位置にベアリングレスモータを配置することができる。
また、上記第11の態様によれば、ベアリングレスモータを表面磁石型のベアリングレスモータによって構成することにより、コンセクエントポール型のベアリングレスモータによってベアリングレスモータを構成する場合よりも、ベアリングレスモータにおける駆動力(駆動軸を回転駆動させるための力)を大きくすることができる。
また、上記第12の態様によれば、ベアリングレスモータと磁気軸受とを用いて駆動軸の回転駆動および非接触支持を行うことにより、ベアリングレスモータの代わりに駆動軸の回転駆動のみを行うモータと駆動軸の非接触支持のみを行う2つの磁気軸受とが設けられている場合よりも、ターボ圧縮機を小型化することができる。
また、上記第12の態様によれば、ベアリングレスモータにおいて支持されるラジアル荷重よりも大きいラジアル荷重が作用する位置に磁気軸受を配置する場合よりも、磁気軸受のサイズ(特に軸長やロータ径)を小さくすることができるので、ターボ圧縮機をさらに小型化することができる。
また、上記第12の態様によれば、駆動軸のラジアル荷重が比較的に大きくなる運転領域においてベアリングレスモータの電磁力を支持力(駆動軸を非接触で支持するための力)に十分に割り当てることができるので、駆動軸のラジアル負荷が比較的に大きくなる運転領域において駆動軸の支持力を確保することができる。
また、上記第13の態様によれば、駆動軸の軸方向において磁気軸受よりもインペラに近い位置にベアリングレスモータを配置することにより、駆動軸の一端部にインペラが接続されたターボ圧縮機において、駆動軸のラジアル荷重が比較的に大きくなる位置にベアリングレスモータを配置し、駆動軸のラジアル荷重が比較的に小さくなる位置に磁気軸受を配置することができる。
また、上記第14の態様によれば、ベアリングレスモータをコンセクエントポール型のベアリングレスモータまたは埋込磁石型のベアリングレスモータによって構成することにより、表面磁石型のベアリングレスモータによってベアリングレスモータを構成する場合よりも、ベアリングレスモータにおける支持力(駆動軸を非接触で支持するための力)を大きくすることができる。
また、上記第15の態様によれば、駆動軸を非接触で支持する駆動支持部において、駆動支持部の大型化を抑制しつつ、駆動軸のチルト方向の変位を低減することが可能になる。
また、上記第16の態様によれば、2つの磁気軸受を容易に制御することが可能になる。
また、上記第17の態様によれば、より確実に上記効果を得ることが可能になる。
また、上記第18の態様によれば、並進方向制御とチルト方向制御それぞれに最適な演算速度、出力容量の制御器を用いることにより制御器にかかるコストの抑制が可能になる。
また、上記第19~第22の態様によれば、磁気軸受がチルト変位角を低減させるための力だけでなく並進方向の変位を低減させるための力も一部受け持つため、ベアリングレスモータが並進方向の変位を低減させるために出力すべき力を低減することができ、ベアリングレスモータの小型化が可能となる。
また、上記第23~第27の態様によれば、気体軸受で駆動軸のラジアル荷重の少なくとも一部を支持することにより、ベアリングレスモータが受け持つラジアル荷重を減少させることができる。このため、ベアリングレスモータの駆動トルク出力を高めることが可能となる。
また、上記第23~第27の態様によれば、ベアリングレスモータおよび気体軸受ならびに駆動軸を含む回転系の軸方向長さを小さく設定することができる。よって、ターボ圧縮機を安全に運転可能な領域を広げることができる。
また、上記第28、第29、および第32の態様によれば、ターボ圧縮機(812)の動作状況に応じて、電源部(861,862)の電源容量の範囲内で電機子電圧VAおよび支持電流ISを調節することができる。
また、上記第30の態様によれば、支持電流ISが第1上限値を超えないようにできる一方、電機子巻線(846a~846c,856a~856c)に流れる電流である電機子電流IAに起因するラジアル支持力を増大させることができる。
また、上記第31の態様によれば、電機子電圧VAが第2上限値を超えないようにする場合において電機子電流IAに起因するラジアル支持力が低下するときに、支持電流ISを増大させることによってそれに起因するラジアル支持力で当該低下を補うことができる。
また、上記第33の態様によれば、例えば、支持巻線(847a~847c,857a~857c)における発熱を必要に応じて利用することができる。
また、上記第34の態様によれば、例えば、電機子巻線(846a~846c,856a~856c)における発熱を必要に応じて利用することができる。
また、上記第35の態様によれば、支持電流ISを第1上限値以下に抑制していても、電機子電流IAの増大によってベアリングレスモータ(840,850)のラジアル支持力を増大させることができる。
また、上記第36および第37の態様によれば、冷凍装置(900)において上述した効果を得ることができる。
本発明の実施形態を図面に基づいて詳細に説明する。なお、以下の実施形態は、本質的に好ましい例示であって、本発明、その適用物、あるいはその用途の範囲を制限することを意図するものではない。
《発明の実施形態1》
本発明の実施形態1について説明する。本実施形態のターボ圧縮機(101)は、冷凍サイクルを行う冷媒回路(図示せず)に設けられて冷媒を圧縮するものである。図1に示すように、ターボ圧縮機(101)は、ケーシング(110)と、インペラ(120)と、駆動軸(130)と、タッチダウン軸受(140,141)と、スラスト磁気軸受(150)と、制御部(190)と、電源部(191)と、第1ベアリングレスモータ(160)と、第2ベアリングレスモータ(170)とを備えている。第1ベアリングレスモータ(160)と第2ベアリングレスモータ(170)とは、駆動軸(130)の軸方向に並んで配置されている。
本発明の実施形態1について説明する。本実施形態のターボ圧縮機(101)は、冷凍サイクルを行う冷媒回路(図示せず)に設けられて冷媒を圧縮するものである。図1に示すように、ターボ圧縮機(101)は、ケーシング(110)と、インペラ(120)と、駆動軸(130)と、タッチダウン軸受(140,141)と、スラスト磁気軸受(150)と、制御部(190)と、電源部(191)と、第1ベアリングレスモータ(160)と、第2ベアリングレスモータ(170)とを備えている。第1ベアリングレスモータ(160)と第2ベアリングレスモータ(170)とは、駆動軸(130)の軸方向に並んで配置されている。
なお、本明細書の説明において、「軸方向」とは、回転軸方向のことであって、駆動軸(130)の軸心の方向のことであり、「径方向」とは、駆動軸(130)の軸方向と直交する方向のことである。また、「外周側」とは、駆動軸(130)の軸心からより遠い側のことであり、「内周側」とは、駆動軸(130)の軸心により近い側のことである。
-ケーシング-
ケーシング(110)は、両端が閉塞された円筒状に形成され、円筒軸線が水平向きとなるように配置されている。ケーシング(110)内の空間は、壁部(111)によって区画され、壁部(111)よりも右側の空間がインペラ(120)を収容するインペラ室(112)を構成し、壁部(111)よりも左側の空間が第1および第2ベアリングレスモータ(160,170)を収容する電動機室(114)を構成している。そして、ケーシング(110)内を軸方向に延びる駆動軸(130)がインペラ(120)と第1および第2ベアリングレスモータ(160,170)とを連結している。第1および第2ベアリングレスモータ(160,170)は、駆動支持部を構成している。
ケーシング(110)は、両端が閉塞された円筒状に形成され、円筒軸線が水平向きとなるように配置されている。ケーシング(110)内の空間は、壁部(111)によって区画され、壁部(111)よりも右側の空間がインペラ(120)を収容するインペラ室(112)を構成し、壁部(111)よりも左側の空間が第1および第2ベアリングレスモータ(160,170)を収容する電動機室(114)を構成している。そして、ケーシング(110)内を軸方向に延びる駆動軸(130)がインペラ(120)と第1および第2ベアリングレスモータ(160,170)とを連結している。第1および第2ベアリングレスモータ(160,170)は、駆動支持部を構成している。
-インペラ-
インペラ(120)は、複数の羽根によって外形が略円錐形状となるように形成されている。インペラ(120)は、駆動軸(130)の一端に固定された状態で、インペラ室(112)に収容されている。インペラ室(112)には、吸入管(115)および吐出管(116)が接続され、インペラ室(112)の外周部には、圧縮空間(113)が形成されている。吸入管(115)は、冷媒を外部からインペラ室(112)内に導くために設けられ、吐出管(116)は、インペラ室(112)内で圧縮された高圧の冷媒を外部へ戻すために設けられている。
インペラ(120)は、複数の羽根によって外形が略円錐形状となるように形成されている。インペラ(120)は、駆動軸(130)の一端に固定された状態で、インペラ室(112)に収容されている。インペラ室(112)には、吸入管(115)および吐出管(116)が接続され、インペラ室(112)の外周部には、圧縮空間(113)が形成されている。吸入管(115)は、冷媒を外部からインペラ室(112)内に導くために設けられ、吐出管(116)は、インペラ室(112)内で圧縮された高圧の冷媒を外部へ戻すために設けられている。
-タッチダウン軸受-
ターボ圧縮機(101)には2つのタッチダウン軸受(140,141)が設けられている。一方のタッチダウン軸受(140)は駆動軸(130)の一端部(図1の右側端部)近傍に設けられ、他方のタッチダウン軸受(141)は駆動軸(130)の他端部近傍に設けられている。これらのタッチダウン軸受(140,141)は、第1および第2ベアリングレスモータ(160,170)が非通電であるとき(すなわち、駆動軸(130)が浮上していないとき)に駆動軸(130)を支持するように構成されている。
ターボ圧縮機(101)には2つのタッチダウン軸受(140,141)が設けられている。一方のタッチダウン軸受(140)は駆動軸(130)の一端部(図1の右側端部)近傍に設けられ、他方のタッチダウン軸受(141)は駆動軸(130)の他端部近傍に設けられている。これらのタッチダウン軸受(140,141)は、第1および第2ベアリングレスモータ(160,170)が非通電であるとき(すなわち、駆動軸(130)が浮上していないとき)に駆動軸(130)を支持するように構成されている。
-スラスト磁気軸受-
図1に示すように、スラスト磁気軸受(150)は、第1および第2電磁石(151,152)を有していて、駆動軸(130)の他端部(すなわち、インペラ(120)が固定された一端部とは反対側の端部)に設けられた円盤状の部分(以下、円盤部(131))を電磁力によって非接触で支持するように構成されている。そして、スラスト磁気軸受(150)は、第1および第2電磁石(151,152)に流れる電流を制御することにより、第1および第2電磁石(151,152)の対向方向(すなわち、軸方向、図1では左右方向)における駆動軸(130)の被支持部(円盤部(131))の位置を制御することができる。
図1に示すように、スラスト磁気軸受(150)は、第1および第2電磁石(151,152)を有していて、駆動軸(130)の他端部(すなわち、インペラ(120)が固定された一端部とは反対側の端部)に設けられた円盤状の部分(以下、円盤部(131))を電磁力によって非接触で支持するように構成されている。そして、スラスト磁気軸受(150)は、第1および第2電磁石(151,152)に流れる電流を制御することにより、第1および第2電磁石(151,152)の対向方向(すなわち、軸方向、図1では左右方向)における駆動軸(130)の被支持部(円盤部(131))の位置を制御することができる。
-制御部-
制御部(190)は、駆動軸(130)の位置が所望の位置となるように、円盤部(131)とスラスト磁気軸受(150)との間のギャップを検出可能なギャップセンサ(図示せず)の検出値、第1および第2ベアリングレスモータ(160,170)における固定子(164,174)と回転子(161,171)との間のギャップを検出可能なギャップセンサ(図示せず)の検出値、およびインペラ(120)および駆動軸(130)の目標回転速度の情報に基づいて、スラスト磁気軸受(150)に供給する電圧を制御するための電圧指令値(スラスト電圧指令値)や、第1および第2ベアリングレスモータ(160,170)に供給する電圧を制御するための電圧指令値(モータ電圧指令値)を出力する。例えば、制御部(190)は、マイクロコンピュータ(図示せず)と、マイクロコンピュータを動作させるプログラムとによって構成することが可能である。
制御部(190)は、駆動軸(130)の位置が所望の位置となるように、円盤部(131)とスラスト磁気軸受(150)との間のギャップを検出可能なギャップセンサ(図示せず)の検出値、第1および第2ベアリングレスモータ(160,170)における固定子(164,174)と回転子(161,171)との間のギャップを検出可能なギャップセンサ(図示せず)の検出値、およびインペラ(120)および駆動軸(130)の目標回転速度の情報に基づいて、スラスト磁気軸受(150)に供給する電圧を制御するための電圧指令値(スラスト電圧指令値)や、第1および第2ベアリングレスモータ(160,170)に供給する電圧を制御するための電圧指令値(モータ電圧指令値)を出力する。例えば、制御部(190)は、マイクロコンピュータ(図示せず)と、マイクロコンピュータを動作させるプログラムとによって構成することが可能である。
-電源部-
電源部(191)は、制御部(190)からのスラスト電圧指令値およびモータ電圧指令値に基づいて、スラスト磁気軸受(150)ならびに第1および第2ベアリングレスモータ(160,170)に電圧をそれぞれ供給する。例えば、電源部(191)は、PWM(Pulse Width Modulation)アンプによって構成することが可能である。電源部(191)は、電気回路を構成している。
電源部(191)は、制御部(190)からのスラスト電圧指令値およびモータ電圧指令値に基づいて、スラスト磁気軸受(150)ならびに第1および第2ベアリングレスモータ(160,170)に電圧をそれぞれ供給する。例えば、電源部(191)は、PWM(Pulse Width Modulation)アンプによって構成することが可能である。電源部(191)は、電気回路を構成している。
-第1ベアリングレスモータ-
第1ベアリングレスモータ(160)は、電動機室(114)のうちインペラ(120)に近い側に配置されている。第1ベアリングレスモータ(160)は、電磁力によって駆動軸(130)を回転駆動しかつ駆動軸(130)のラジアル荷重を非接触で支持するように構成されている。第1ベアリングレスモータ(160)は、一対の回転子(161)と固定子(164)を有する。回転子(161)は駆動軸(130)に固定され、固定子(164)はケーシング(110)の内周壁に固定されている。
第1ベアリングレスモータ(160)は、電動機室(114)のうちインペラ(120)に近い側に配置されている。第1ベアリングレスモータ(160)は、電磁力によって駆動軸(130)を回転駆動しかつ駆動軸(130)のラジアル荷重を非接触で支持するように構成されている。第1ベアリングレスモータ(160)は、一対の回転子(161)と固定子(164)を有する。回転子(161)は駆動軸(130)に固定され、固定子(164)はケーシング(110)の内周壁に固定されている。
図2は、第1ベアリングレスモータ(160)の構成例を示す横断面図である。同図に示すように、第1ベアリングレスモータ(160)は、コンセクエントポール型のベアリングレスモータである。第1ベアリングレスモータ(160)の固定子(164)は、バックヨーク部(165)と、図示を省略する複数のティース部と、ティース部に巻回された駆動用コイル(166a~166c)および支持用コイル(167a~167c)とを有する。第1ベアリングレスモータ(160)の回転子(161)は、コア部(162)と、このコア部(162)に埋設された複数(この例では、4つ)の永久磁石(163)とを有する。
固定子(164)は、磁性材料(例えば、積層鋼板)で構成されている。固定子(164)のバックヨーク部(165)は、円筒状に形成されている。駆動用コイル(166a~166c)および支持用コイル(167a~167c)は、各ティース部に分布巻方式で巻回されている。なお、駆動用コイル(166a~166c)および支持用コイル(167a~167c)は、各ティース部に集中巻方式で巻回されていてもよい。
駆動用コイル(166a~166c)は、ティース部のうち内周側に巻回されたコイルである。駆動用コイル(166a~166c)は、図2において太実線で囲んで示すU相駆動用コイル(166a)と、太破線で囲んで示すV相駆動用コイル(166b)と、細実線で囲んで示すW相駆動用コイル(166c)とから構成されている。
支持用コイル(167a~167c)は、ティース部のうち外周側に巻回されたコイルである。支持用コイル(167a~167c)は、図2において太実線で囲んで示すU相支持用コイル(167a)と、太破線で囲んで示すV相支持用コイル(167b)と、細実線で囲んで示すW相支持用コイル(167c)とから構成されている。
回転子(161)のコア部(162)は、円筒状に形成されている。コア部(162)の中央部には駆動軸(130)を挿通するためのシャフト孔(図示せず)が形成されている。コア部(162)は、磁性材料(例えば、積層鋼板)で構成されている。コア部(162)の外周面近傍には、この外周面に沿った形状を有する4つの永久磁石(163)が、回転子(161)の周方向において90°の角度ピッチ(AP1)で埋設されている。これら4つの永久磁石(163)は、互いに同形状である。各永久磁石(163)の外周面側はN極となっており、各永久磁石(163)の間のコア部(162)の外周面は擬似的にS極となっている。なお、各永久磁石(163)の外周面側がS極となっていてもよい。
図3には、第1ベアリングレスモータ(160)において、各永久磁石(163)によって生じる磁石磁束φ1と、インペラ(120)および駆動軸(130)を回転駆動するために生じる駆動用磁束BM1とが示されている。第1ベアリングレスモータ(160)は、これら磁石磁束φ1と駆動用磁束BM1との相互作用によって、同図に示す駆動トルクT1(すなわち、駆動軸(130)を図3の反時計回り方向に回転させるトルク)を発生させるように構成されている。なお、同図中には、駆動用コイル(166a~166c)に流れる電流と等価の電流IM1が示されている。
図4には、第1ベアリングレスモータ(160)において、各永久磁石(163)によって生じる磁石磁束φ1と、駆動軸(130)のラジアル荷重を非接触で支持するために生じる支持用磁束BS1とが示されている。第1ベアリングレスモータ(160)は、これら磁石磁束φ1と支持用磁束BS1との相互作用によって、同図に示す支持力F1(すなわち、駆動軸(130)を図4で右方向に押す力)を発生させるように構成されている。なお、同図中には、支持用コイル(167a~167c)に流れる電流と等価の電流IS1が示されている。
図4からわかるように、支持用磁束BS1の磁路は、固定子(164)のバックヨーク部(165)およびティース部と、エアギャップと、回転子(161)のコア部(162)とを通る経路である。バックヨーク部(165)、ティース部およびコア部(162)の磁気抵抗は、永久磁石(163)の磁気抵抗よりも小さい。したがって、第1ベアリングレスモータ(160)は、後述するように回転子(171)の外周面の略全体に永久磁石(173)が配置される第2ベアリングレスモータ(170)(すなわち、駆動軸(130)のラジアル荷重を支持する磁力を発生させるための磁路中に永久磁石(173)が含まれる第2ベアリングレスモータ(170))に比べて、駆動軸(130)のラジアル荷重を支持する磁力を発生させるための磁路の磁気抵抗が小さい。よって、第1ベアリングレスモータ(160)は、第2ベアリングレスモータ(170)に比べて、駆動軸(130)のラジアル荷重を支持するための支持力をより大きく発生させることができる。
図5には、第1ベアリングレスモータ(160)において、各永久磁石(163)によって生じる磁石磁束φ1と、インペラ(120)および駆動軸(130)を回転駆動するために生じる駆動用磁束BM1と、駆動軸(130)のラジアル荷重を非接触で支持するために生じる支持用磁束BS1とが示されている。第1ベアリングレスモータ(160)は、これら磁石磁束φ1と駆動用磁束BM1と支持用磁束BS1との相互作用によって、同図に示す駆動トルクT1および支持力F1を同時に発生させるように構成されている。なお、同図中には、駆動用コイル(166a~166c)および支持用コイル(167a~167c)に流れる電流と等価の電流IM1,IS1が示されている。
-第2ベアリングレスモータ-
第2ベアリングレスモータ(170)は、電動機室(114)のうちインペラ(120)から遠い側に配置されている。第2ベアリングレスモータ(170)は、電磁力によって駆動軸(130)を回転駆動しかつ駆動軸(130)のラジアル荷重を非接触で支持するように構成されている。第2ベアリングレスモータ(170)は、一対の回転子(171)と固定子(174)を有する。回転子(171)は駆動軸(130)に固定され、固定子(174)はケーシング(110)に固定されている。
第2ベアリングレスモータ(170)は、電動機室(114)のうちインペラ(120)から遠い側に配置されている。第2ベアリングレスモータ(170)は、電磁力によって駆動軸(130)を回転駆動しかつ駆動軸(130)のラジアル荷重を非接触で支持するように構成されている。第2ベアリングレスモータ(170)は、一対の回転子(171)と固定子(174)を有する。回転子(171)は駆動軸(130)に固定され、固定子(174)はケーシング(110)に固定されている。
図6は、第2ベアリングレスモータ(170)の構成例を示す横断面図である。同図に示すように、第2ベアリングレスモータ(170)は、実質的には表面磁石型のベアリングレスモータと同様の挙動を示す埋込磁石型のベアリングレスモータである。第2ベアリングレスモータ(170)の固定子(174)の構成は、第1ベアリングレスモータ(160)の固定子(164)の構成と同じである。第2ベアリングレスモータ(170)の回転子(171)は、コア部(172)と、このコア部(172)に埋設された複数(この例では、8つ)の永久磁石(173)とを有する。
回転子(171)のコア部(172)は、円筒状に形成されている。コア部(172)の中央部には駆動軸(130)を挿通するためのシャフト孔(図示せず)が形成されている。コア部(172)は、磁性材料(例えば、積層鋼板)で構成されている。コア部(172)の外周面近傍には、この外周面に沿った形状を有する8つの永久磁石(173)が、回転子(171)の周方向において45°の角度ピッチ(AP2)(すなわち、第1ベアリングレスモータ(160)における90°の角度ピッチ(AP1)の半分)で埋設されている。これら8つの永久磁石(173)は、互いに同形状であって、さらに第1ベアリングレスモータ(160)の4つの永久磁石(163)とも互いに同形状である。各永久磁石(173)の外周面側は回転子(171)の周方向においてN極とS極とが交互に現れるようになっている。
図6には、第2ベアリングレスモータ(170)において、各永久磁石(173)によって生じる磁石磁束φ2と、インペラ(120)および駆動軸(130)を回転駆動するために生じる駆動用磁束BM2と、駆動軸(130)のラジアル荷重を非接触で支持するために生じる支持用磁束BS2とが示されている。第2ベアリングレスモータ(170)は、これら磁石磁束φ2と駆動用磁束BM2と支持用磁束BS2との相互作用によって、同図に示す駆動トルクT2(すなわち、駆動軸(130)を図6の反時計回り方向に回転させるトルク)および支持力F2(すなわち、駆動軸(130)を図6の右方向に押す力)を同時に発生させるように構成されている。
図6からわかるように、支持用磁束BS2の磁路は、固定子(174)のバックヨーク部(175)およびティース部と、エアギャップと、回転子(171)の永久磁石(173)およびコア部(172)とを通る経路である。
一方、第2ベアリングレスモータ(170)における永久磁石(173)の数は、第1ベアリングレスモータ(160)における永久磁石(163)の数よりも多い。このため、第2ベアリングレスモータ(170)は、第1ベアリングレスモータ(160)に比べて(図3を参照)、永久磁石(173)によって生じる磁束の磁束密度が高い。よって、第2ベアリングレスモータ(170)は、第1ベアリングレスモータ(160)に比べて、インペラ(120)および駆動軸(130)を回転駆動するための駆動トルクT2をより大きく発生させることができる。
〈ターボ圧縮機の運転領域〉
図7は、ターボ圧縮機(101)の運転領域について説明するための図である。同図において、横軸は冷媒体積流量を、縦軸はヘッドをそれぞれ示す。ターボ圧縮機(101)は、電源部(191)によって所定の電流範囲内の電流が駆動支持部(本実施形態では、第1および第2ベアリングレスモータ(160,170))に流れることにより、所定の運転領域において運転され得る。
図7は、ターボ圧縮機(101)の運転領域について説明するための図である。同図において、横軸は冷媒体積流量を、縦軸はヘッドをそれぞれ示す。ターボ圧縮機(101)は、電源部(191)によって所定の電流範囲内の電流が駆動支持部(本実施形態では、第1および第2ベアリングレスモータ(160,170))に流れることにより、所定の運転領域において運転され得る。
この所定の運転領域は、主に、図7に太線で示すサージラインの内側の定常運転領域(A)、高負荷トルク領域(B)およびタービュランス領域(C)と、当該サージラインの外側のサージング領域(D)とを含む。本明細書では、定常運転領域(A)および高負荷トルク領域(B)においてターボ圧縮機(101)を運転する場合を「通常運転時」とも呼ぶ。また、タービュランス領域(C)のことを「旋回失速が生じる領域」とも呼ぶ。
定常運転領域(A)は、図7に符号Aで示す領域であって、インペラ(120)および駆動軸(130)の負荷トルク(すなわち、インペラ(120)および駆動軸(130)を回転駆動するための駆動トルクT1,T2)が比較的小さく、かつ駆動軸(130)のラジアル荷重も比較的小さい領域である。
高負荷トルク領域(B)は、図7に符号Bで示す領域であって、インペラ(120)および駆動軸(130)の負荷トルクが比較的大きく、かつ駆動軸(130)のラジアル荷重も比較的大きい領域である。
ターボ圧縮機(101)におけるインペラ(120)および駆動軸(130)の負荷トルクは、この高負荷トルク領域(B)のうち図7中で最も右上の点において最大となる。そして、この負荷トルクが最大となる点においてターボ圧縮機(101)を運転するときに、駆動用磁束BM(すなわち、第1ベアリングレスモータ(160)の駆動用磁束BM1と、第2ベアリングレスモータ(170)の駆動用磁束BM2との和)の値がその最大値BMmaxとなる。このBMmaxは、上記所定の運転領域における最大トルク負荷に対応する駆動トルクを発生させるために駆動支持部で生じる磁束である。また、駆動用磁束BMの値がその最大値BMmaxとなるときには、第1および第2ベアリングレスモータ(160,170)の駆動用コイル(166a~166c,176a~176c)に合計で最大トルク電流IBMmaxが流れる。
また、ターボ圧縮機(101)におけるインペラ(120)および駆動軸(130)の負荷トルクと駆動軸(130)のラジアル荷重とは、この高負荷トルク領域(B)のうち図7中で最も右上の点においてそれぞれ大きくなる(特に負荷トルクは最大となる)。そして、この高負荷トルク領域(B)のうち図7中で最も右上の点においてターボ圧縮機(101)を運転するときに、上記駆動用磁束BMと支持用磁束BS(すなわち、第1ベアリングレスモータ(160)の支持用磁束BS1と、第2ベアリングレスモータ(170)の支持用磁束BS2との和)との和がその最大値(BM+BS)maxとなる。
タービュランス領域(C)は、図7に符号Cで示す領域であって、インペラ(120)および駆動軸(130)の負荷トルクは比較的小さい一方、駆動軸(130)のラジアル荷重は比較的大きい領域である。このタービュランス領域(C)では、上述のように旋回失速が生じ得る。旋回失速とは、例えば、凝縮温度(すなわち、外気温)が比較的高い状態で冷凍負荷を下げてターボ圧縮機(101)を運転する場合に生じる現象である。そのような運転は、典型的には、ビルなどの多数の部屋を有する建物において、一部の部屋のみの空調が要求される場合に行われる。旋回失速が発生すると、インペラ(120)の複数の羽根の間で圧力の不均衡が生じ、それにより駆動軸(130)が振動する。この振動に起因して、タービュランス領域(C)では駆動軸(130)のラジアル荷重が比較的大きくなる。
サージング領域(D)は、図7に符号Dで示す領域であって、停電時などの非常の事態においてターボ圧縮機(101)がこのサージング領域(D)において一時的に運転されることがある。サージング領域(D)は、インペラ(120)および駆動軸(130)の負荷トルクは比較的小さい一方、駆動軸(130)のラジアル荷重は比較的大きい領域である。ターボ圧縮機(101)における駆動軸(130)のラジアル荷重は、このサージング領域(D)中の所定の点において最大となる。そして、このラジアル荷重が最大となる点においてターボ圧縮機(101)を運転するときに、上記支持用磁束BSの値がその最大値BSmaxとなる。このBSmaxは、上記所定の運転領域における駆動軸(130)の最大ラジアル荷重を非接触で支持するために駆動支持部で生じる磁束である。また、支持用磁束BSの値がその最大値BSmaxとなるときには、第1および第2ベアリングレスモータ(160,170)の支持用コイル(167a~167c,177a~177c)に合計で最大支持力電流IBSmaxが流れる。
ここで、第1および第2ベアリングレスモータ(160,170)において最大負荷トルクおよび最大ラジアル荷重支持力との両方を同時に発生可能にするという通常の考え方にしたがうと、第1および第2ベアリングレスモータ(160,170)に上記所定の電流範囲の上限値に相当する電流が流れることによって当該第1および第2ベアリングレスモータ(160,170)で生じる磁束BmaxがBMmax+BSmaxに一致する(Bmax=BMmax+BSmax)ように第1および第2ベアリングレスモータ(160,170)を構成することになる。
これに対し、本実施形態では、第1および第2ベアリングレスモータ(160,170)に合計で所定の電流範囲の上限値に相当する電流が流れることによって当該第1および第2ベアリングレスモータ(160,170)で生じる磁束Bmaxが、(BM+BS)max以上であってBMmax+BSmax未満となる((BM+BS)max≦Bmax<BMmax+BSmax)ように第1および第2ベアリングレスモータ(160,170)を構成する。
具体的には、通常の考え方にしたがった構成に比べて、固定子(164,174)の外径やティース部の周方向幅および回転子(161,171)の外径、ならびに固定子(164,174)および回転子(161,171)の軸方向長さなどが小さくなるように第1および第2ベアリングレスモータ(160,170)を構成する。すなわち、本実施形態の構成では、通常の考え方にしたがった構成に比べて、第1および第2ベアリングレスモータ(160,170)において磁路を構成する部品である固定子(164,174)および回転子(161,171)を小型化することができる。
このことは、冷凍装置用のターボ圧縮機(101)において、最大駆動トルクが必要となる運転領域(すなわち、高負荷トルク領域(B))と、最大ラジアル荷重支持力が必要となる運転領域(すなわち、サージング領域(D))とが互いに異なるという事実を本願発明者が発見したことに基づく。つまり、第1および第2ベアリングレスモータ(160,170)において最大駆動トルクと最大ラジアル荷重支持力との両方を同時に発生させる必要がないため、本実施形態によれば、(BM+BS)max≦Bmax<BMmax+BSmaxという関係が成立するように第1および第2ベアリングレスモータ(160,170)を構成することによって、ターボ圧縮機(101)の機能と信頼性を損なうことなく当該第1および第2ベアリングレスモータ(160,170)を小型化することができる。
〈サージング領域などにおける制御部および電源部の動作〉
制御部(190)は、ターボ圧縮機(101)をサージング領域(D)で運転する際には、同一回転速度で比較したとき、通常運転時に比べて、駆動用磁束BM(すなわち、第1および第2ベアリングレスモータ(160,170)で生じる駆動用磁束の和BM1+BM2)を発生させるための電流IM(すなわち、第1および第2ベアリングレスモータ(160,170)の駆動用コイル(166a~166c,176a~176c)に流れる電流の合計IM1+IM2)に対する支持用磁束BSを発生させるための電流IS(すなわち、第1および第2ベアリングレスモータ(160,170)の支持用コイル(167a~167c,177a~177c)に流れる電流の合計IS1+IS2)の割合を増加させるよう電源部(191)にモータ指令値を送信する。
制御部(190)は、ターボ圧縮機(101)をサージング領域(D)で運転する際には、同一回転速度で比較したとき、通常運転時に比べて、駆動用磁束BM(すなわち、第1および第2ベアリングレスモータ(160,170)で生じる駆動用磁束の和BM1+BM2)を発生させるための電流IM(すなわち、第1および第2ベアリングレスモータ(160,170)の駆動用コイル(166a~166c,176a~176c)に流れる電流の合計IM1+IM2)に対する支持用磁束BSを発生させるための電流IS(すなわち、第1および第2ベアリングレスモータ(160,170)の支持用コイル(167a~167c,177a~177c)に流れる電流の合計IS1+IS2)の割合を増加させるよう電源部(191)にモータ指令値を送信する。
そのとき、電源部(191)は、制御部(190)から送信されたモータ指令値に基づいて、第1および第2ベアリングレスモータ(160,170)における駆動用コイル(166a~166c,176a~176c)に流れる電流IMに対する支持用コイル(167a~167c,177a~177c)に流れる電流ISの割合を増加させるように当該第1および第2ベアリングレスモータ(160,170)に電圧を供給する。
また、制御部(190)は、ターボ圧縮機(101)を旋回失速が生じる領域(すなわち、タービュランス領域(C))およびサージング領域(D)で運転する場合に冷媒体積流量が減るにつれて、同一回転速度で比較したとき、駆動用磁束BM(すなわち、第1および第2ベアリングレスモータ(160,170)で生じる駆動用磁束の和BM1+BM2)を発生させるための電流IMに対する支持用磁束BSを発生させるための電流ISの割合を増加させていくよう電源部(191)にモータ指令値を送信する。
そのとき、電源部(191)は、制御部(190)から送信されたモータ指令値に基づいて、第1および第2ベアリングレスモータ(160,170)における駆動用コイル(166a~166c,176a~176c)に流れる電流IMに対する支持用コイル(167a~167c,177a~177c)に流れる電流ISの割合を増加させていくように当該第1および第2ベアリングレスモータ(160,170)に電圧を供給する。
また、制御部(190)は、ターボ圧縮機(101)をサージング領域(D)で運転する場合または駆動軸(130)の回転運動を通常停止させる場合に、第1および第2ベアリングレスモータ(160,170)の駆動用コイル(166a~166c,176a~176c)に電流IMを流さずに、第1および第2ベアリングレスモータ(160,170)の支持用コイル(167a~167c,177a~177c)に電流ISを流すよう電源部(191)にモータ指令値を送信する。
そのとき、電源部(191)は、制御部(190)から送信されたモータ指令値に基づいて、第1および第2ベアリングレスモータ(160,170)の支持用コイル(167a~167c,177a~177c)に電流ISが流れるように当該第1および第2ベアリングレスモータ(160,170)に電圧を供給する。
-実施形態1の効果-
本実施形態では、ターボ圧縮機(101)に第1および第2ベアリングレスモータ(160,170)を適用するにあたって通常の考え方にしたがって当該第1および第2ベアリングレスモータ(160,170)を構成する場合に比べて、第1および第2ベアリングレスモータ(160,170)を小型化することができる。よって、ターボ圧縮機(101)全体としての小型化や、ターボ圧縮機(101)の低コスト化などを図ることができる。
本実施形態では、ターボ圧縮機(101)に第1および第2ベアリングレスモータ(160,170)を適用するにあたって通常の考え方にしたがって当該第1および第2ベアリングレスモータ(160,170)を構成する場合に比べて、第1および第2ベアリングレスモータ(160,170)を小型化することができる。よって、ターボ圧縮機(101)全体としての小型化や、ターボ圧縮機(101)の低コスト化などを図ることができる。
また、本実施形態では、第1および第2ベアリングレスモータ(160,170)のみによって駆動軸(130)のラジアル荷重を支持するので、従来のターボ圧縮機(例えば、特許文献1を参照)において用いてきた2つのラジアル磁気軸受を省略することができ、インペラ(120)および駆動軸(130)を含む回転系を小型化することができる。よって、当該回転系の共振周波数が従来よりも高くなり、それによりターボ圧縮機(101)を安全に運転できる運転領域を広めることができる。
また、本実施形態では、サージング領域(D)においてターボ圧縮機(101)を運転する場合に、通常運転時よりも駆動軸(130)のラジアル荷重が大きくなることに対応して、駆動用磁束BMを発生させるための電流IMに対する支持用磁束BSを発生させるための電流ISの割合を、通常運転時に比べて増加させる。これにより、サージング領域(D)でもターボ圧縮機(101)を問題なく運転することが可能となる。
また、本実施形態では、ターボ圧縮機(101)をタービュランス領域(C)およびサージング領域(D)で運転する場合に冷媒体積流量が減るにつれて、同一回転速度で比較すると冷媒体積流量の減少に伴って駆動軸(130)のラジアル荷重が大きくなることに対応して、駆動用磁束BMを発生させるための電流IMに対する支持用磁束BSを発生させるための電流ISの割合を増加させていく。これにより、タービュランス領域(C)およびサージング領域(D)でもターボ圧縮機(101)を問題なく運転することが可能となる。
-実施形態1の変形例-
実施形態1の変形例について説明する。本変形例は、所定の電流範囲の上限値に相当する電流が上記実施形態1のそれと異なる。
実施形態1の変形例について説明する。本変形例は、所定の電流範囲の上限値に相当する電流が上記実施形態1のそれと異なる。
本変形例では、所定の電流範囲の上限値に相当する電流が、最大トルク電流IBMmaxと最大支持力電流IBSmaxとを足し合わせた電流である。そして、本変形例では、第1および第2ベアリングレスモータ(160,170)のコイル(166a~166c,167a~167c,176a~176c,177a~177c)に、合計で最大トルク電流IBMmaxと最大支持力電流IBSmaxとを足し合わせた電流を流すことによって当該第1および第2ベアリングレスモータ(160,170)で生じる磁束BMSmaxが、BMmax+BSmax未満となる(BMSmax<BMmax+BSmax)ように第1および第2ベアリングレスモータ(160,170)を構成する。なお、第1および第2ベアリングレスモータ(160,170)で磁束BMSmaxが生じるときには、駆動用磁束BMおよび支持用磁束BSの主磁路において磁気飽和が生じると考えられる。
具体的には、上記実施形態1と同様に、通常の考え方にしたがった構成に比べて、固定子(164,174)の外径やティース部の周方向幅および回転子(161,171)の外径、ならびに固定子(164,174)および回転子(161,171)の軸方向長さなどが小さくなるように第1および第2ベアリングレスモータ(160,170)を構成する。すなわち、本変形例の構成でも、通常の考え方にしたがった構成に比べて、第1および第2ベアリングレスモータ(160,170)において磁路を構成する部品である固定子(164,174)および回転子(161,171)を小型化することができる。
《発明の実施形態2》
本発明の実施形態2について説明する。本実施形態のターボ圧縮機(101)は、駆動支持部の構成が上記実施形態1のものと異なる。以下では、実施形態1と異なる点について主に説明する。
本発明の実施形態2について説明する。本実施形態のターボ圧縮機(101)は、駆動支持部の構成が上記実施形態1のものと異なる。以下では、実施形態1と異なる点について主に説明する。
図8に示すように、本実施形態のターボ圧縮機(101)は、第1および第2ベアリングレスモータ(160,170)ではなく、1つのラジアル磁気軸受(180)と、1つのベアリングレスモータ(170)とを備えている。ラジアル磁気軸受(180)およびベアリングレスモータ(170)は、駆動支持部を構成している。
ラジアル磁気軸受(180)は、電動機室(114)のうちインペラ(120)に近い側に配置され、ベアリングレスモータ(170)は、電動機室(114)のうちインペラ(120)から遠い側に配置されている。ベアリングレスモータ(170)の構成は、例えば上記実施形態1の第2ベアリングレスモータ(170)の構成と同様である。なお、電動機室(114)のうちインペラ(120)に近い側にラジアル磁気軸受(180)が配置され、電動機室(114)のうちインペラ(120)から遠い側にベアリングレスモータ(170)が配置されていてもよい。
図9は、ラジアル磁気軸受(180)の構成例を示す横断面図である。同図に示すように、ラジアル磁気軸受(180)は、ヘテロポーラ型のラジアル磁気軸受を構成している。ラジアル磁気軸受(180)は、バックヨーク部(182)および複数のティース部(183)を有する固定子(181)と、ティース部(183)に巻回された複数のコイル(184)とを有する。ラジアル磁気軸受(180)は、電源部(191)によって各コイル(184)に電流が流れることにより生じる電磁力によって駆動軸(130)のラジアル荷重を非接触で支持するように構成されている。なお、各コイル(184)に流れる電流の方向は、支持用磁束BS1が図9に示す方向に生じるように設定される。ラジアル磁気軸受(180)は、ケーシング(110)の内周壁に固定されている。
実施形態2では、インペラ(120)および駆動軸(130)を回転駆動するためにベアリングレスモータ(170)およびラジアル磁気軸受(180)で生じる磁束である駆動用磁束BMは、ベアリングレスモータ(170)の駆動用磁束BM2である。また、駆動軸(130)のラジアル荷重を支持するためにベアリングレスモータ(170)およびラジアル磁気軸受(180)で生じる磁束である支持用磁束BSは、ラジアル磁気軸受(180)の支持用磁束BS1(図9を参照)と、ベアリングレスモータ(170)の支持用磁束BS2との和である。
本実施形態においても、上記実施形態1と同様の効果を得ることができる。
《発明の実施形態3》
本発明の実施形態3について説明する。
本発明の実施形態3について説明する。
〈空気調和機〉
図10は、実施形態による空気調和装置(300)の構成を例示している。空気調和装置(300)は、冷媒回路(310)を備えている。冷媒回路(310)は、ターボ圧縮機(210)と凝縮器(320)と膨張弁(330)と蒸発器(340)とを有し、冷媒が循環して冷凍サイクルが行われるように構成されている。例えば、凝縮器(320)および蒸発器(340)は、クロスフィン型の熱交換器により構成され、膨張弁(330)は、電動弁により構成されている。
図10は、実施形態による空気調和装置(300)の構成を例示している。空気調和装置(300)は、冷媒回路(310)を備えている。冷媒回路(310)は、ターボ圧縮機(210)と凝縮器(320)と膨張弁(330)と蒸発器(340)とを有し、冷媒が循環して冷凍サイクルが行われるように構成されている。例えば、凝縮器(320)および蒸発器(340)は、クロスフィン型の熱交換器により構成され、膨張弁(330)は、電動弁により構成されている。
〈ターボ圧縮機〉
図11は、図10に示したターボ圧縮機(210)の構成を例示している。ターボ圧縮機(210)は、冷媒回路(310)に設けられて冷媒を圧縮するように構成されている。この例では、ターボ圧縮機(210)は、ケーシング(211)と、インペラ(221)と、電動機システム(230)とを備えている。電動機システム(230)は、駆動軸(240)と、ベアリングレスモータ(250)と、ラジアル磁気軸受(260)と、制御部(280)と、電源部(281)とを有している。また、この例では、電動機システム(230)は、第1タッチダウン軸受(231)と、第2タッチダウン軸受(232)と、スラスト磁気軸受(233)とをさらに有している。
図11は、図10に示したターボ圧縮機(210)の構成を例示している。ターボ圧縮機(210)は、冷媒回路(310)に設けられて冷媒を圧縮するように構成されている。この例では、ターボ圧縮機(210)は、ケーシング(211)と、インペラ(221)と、電動機システム(230)とを備えている。電動機システム(230)は、駆動軸(240)と、ベアリングレスモータ(250)と、ラジアル磁気軸受(260)と、制御部(280)と、電源部(281)とを有している。また、この例では、電動機システム(230)は、第1タッチダウン軸受(231)と、第2タッチダウン軸受(232)と、スラスト磁気軸受(233)とをさらに有している。
なお、以下の説明において、「軸方向」とは、回転軸方向のことであって、駆動軸(240)の軸心の方向のことであり、「径方向」とは、駆動軸(240)の軸方向と直交する方向のことである。また、「外周側」とは、駆動軸(240)の軸心からより遠い側のことであり、「内周側」とは、駆動軸(240)の軸心により近い側のことである。
-ケーシング-
ケーシング(211)は、両端が閉塞された円筒状に形成され、円筒軸線が水平向きとなるように配置されている。ケーシング(211)内の空間は、壁部(211a)によって区画され、壁部(211a)よりも右側の空間がインペラ(221)を収容するインペラ室(S201)を構成し、壁部(211a)よりも左側の空間がベアリングレスモータ(250)を収容する電動機室(S202)を構成している。また、電動機室(S202)には、ベアリングレスモータ(250)とラジアル磁気軸受(260)と第1タッチダウン軸受(231)と第2タッチダウン軸受(232)とスラスト磁気軸受(233)が収容され、これらが電動機室(S202)の内周壁に固定されている。
ケーシング(211)は、両端が閉塞された円筒状に形成され、円筒軸線が水平向きとなるように配置されている。ケーシング(211)内の空間は、壁部(211a)によって区画され、壁部(211a)よりも右側の空間がインペラ(221)を収容するインペラ室(S201)を構成し、壁部(211a)よりも左側の空間がベアリングレスモータ(250)を収容する電動機室(S202)を構成している。また、電動機室(S202)には、ベアリングレスモータ(250)とラジアル磁気軸受(260)と第1タッチダウン軸受(231)と第2タッチダウン軸受(232)とスラスト磁気軸受(233)が収容され、これらが電動機室(S202)の内周壁に固定されている。
-駆動軸-
駆動軸(240)は、負荷(220)(この例ではインペラ(221))を回転駆動するために設けられている。この例では、駆動軸(240)は、ケーシング(211)内を軸方向に延びてインペラ(221)とベアリングレスモータ(250)とを連結している。具体的には、駆動軸(240)の一端部にインペラ(221)が固定され、駆動軸(240)の中間部にベアリングレスモータ(250)が配置されている。また、駆動軸(240)の他端部(すなわちインペラ(221)が固定された一端部とは反対側の端部)には、円盤状の部分(以下「円盤部(241)と記載」)が設けられている。なお、円盤部(241)は、磁性材料(例えば鉄)で構成されている。
駆動軸(240)は、負荷(220)(この例ではインペラ(221))を回転駆動するために設けられている。この例では、駆動軸(240)は、ケーシング(211)内を軸方向に延びてインペラ(221)とベアリングレスモータ(250)とを連結している。具体的には、駆動軸(240)の一端部にインペラ(221)が固定され、駆動軸(240)の中間部にベアリングレスモータ(250)が配置されている。また、駆動軸(240)の他端部(すなわちインペラ(221)が固定された一端部とは反対側の端部)には、円盤状の部分(以下「円盤部(241)と記載」)が設けられている。なお、円盤部(241)は、磁性材料(例えば鉄)で構成されている。
-インペラ(負荷)-
インペラ(221)は、複数の羽根によって外形が略円錐形状となるように形成され、駆動軸(240)の一端部に固定された状態で、インペラ室(S201)に収容されている。インペラ室(S201)には、吸入管(P201)と吐出管(P202)とが接続されている。吸入管(P201)は、冷媒(流体)を外部からインペラ室(S201)に導くために設けられている。吐出管(P202)は、インペラ室(S201)内で圧縮された高圧の冷媒(流体)を外部へ戻すために設けられている。すなわち、この例では、インペラ(221)とインペラ室(S201)とによって圧縮機構が構成されている。
インペラ(221)は、複数の羽根によって外形が略円錐形状となるように形成され、駆動軸(240)の一端部に固定された状態で、インペラ室(S201)に収容されている。インペラ室(S201)には、吸入管(P201)と吐出管(P202)とが接続されている。吸入管(P201)は、冷媒(流体)を外部からインペラ室(S201)に導くために設けられている。吐出管(P202)は、インペラ室(S201)内で圧縮された高圧の冷媒(流体)を外部へ戻すために設けられている。すなわち、この例では、インペラ(221)とインペラ室(S201)とによって圧縮機構が構成されている。
-ベアリングレスモータ-
ベアリングレスモータ(250)は、一対の回転子(251)と固定子(254)とを有して駆動軸(240)を回転駆動し且つ駆動軸(240)のラジアル荷重を非接触で支持するように構成されている。回転子(251)は、駆動軸(240)に固定され、固定子(254)は、ケーシング(211)の内周壁に固定されている。
ベアリングレスモータ(250)は、一対の回転子(251)と固定子(254)とを有して駆動軸(240)を回転駆動し且つ駆動軸(240)のラジアル荷重を非接触で支持するように構成されている。回転子(251)は、駆動軸(240)に固定され、固定子(254)は、ケーシング(211)の内周壁に固定されている。
図12に示すように、この例では、ベアリングレスモータ(250)は、コンセクエントポール型のベアリングレスモータによって構成されている。
ベアリングレスモータ(250)の回転子(251)は、回転子コア(252)と、回転子コア(252)に埋設された複数(この例では4つ)の永久磁石(253)とを有している。回転子コア(252)は、磁性材料(例えば積層鋼板)で構成され、円柱状に形成されている。回転子コア(252)の中央部には、駆動軸(240)を挿通するためのシャフト孔が形成されている。
複数の永久磁石(253)は、回転子(251)の周方向において所定の角度ピッチで配置されている。この例では、4つの永久磁石(253)が回転子(251)の周方向において90°の角度ピッチで配置されている。また、この例では、永久磁石(253)は、回転子コア(252)の外周面の近傍(外周部)に埋設され、回転子コア(252)の外周面に沿う形状(円弧状)に形成されている。また、4つの永久磁石(253)は、互いに同形状となっている。そして、4つの永久磁石(253)の外周面側がN極となっており、回転子コア(252)の外周面のうち回転子(251)の周方向において4つの永久磁石(253)の間に位置する部分が擬似的にS極となっている。なお、4つの永久磁石(253)の外周面側がS極となっていてもよい。この場合、回転子コア(252)の外周面のうち回転子(251)の周方向において4つの永久磁石(253)の間に位置する部分が擬似的にN極となる。
ベアリングレスモータ(250)の固定子(254)は、磁性材料(例えば積層鋼板)で構成され、バックヨーク部(255)と、複数のティース部(図示を省略)と、ティース部に巻回された駆動用コイル(256a,256b,256c)および支持用コイル(257a,257b,257c)とを有している。バックヨーク部(255)は、円筒状に形成されている。駆動用コイル(256a,256b,256c)および支持用コイル(257a,257b,257c)は、各ティース部に分布巻方式で巻回されている。なお、駆動用コイル(256a,256b,256c)および支持用コイル(257a,257b,257c)は、各ティース部に集中巻方式で巻回されていてもよい。
駆動用コイル(256a,256b,256c)は、ティース部のうち内周側に巻回されたコイルである。駆動用コイル(256a,256b,256c)は、図12において太実線で囲んで示したU相駆動用コイル(256a)と、図12において太破線で囲んで示したV相駆動用コイル(256b)と、図12において細実線で囲んで示したW相駆動用コイル(256c)とから構成されている。
支持用コイル(257a,257b,257c)は、ティース部のうち外周側に巻回されたコイルである。支持用コイル(257a,257b,257c)は、図12において太実線で囲んで示したU相支持用コイル(257a)と、図12において太破線で囲んで示したV相支持用コイル(257b)と、図12において細実線で囲んで示したW相支持用コイル(257c)とから構成されている。
図13は、ベアリングレスモータ(250)において発生する磁石磁束(永久磁石(253)によって生じる磁石磁束φ1)と駆動用磁束(駆動軸(240)を回転駆動するために生じる駆動用磁束BM1)とを例示している。駆動用磁束BM1は、駆動用コイル(256a,256b,256c)を流れる電流に応じて発生する磁束である。ベアリングレスモータ(250)は、これらの磁石磁束φ1と駆動用磁束BM1との相互作用によって、駆動軸(240)を回転させるための駆動トルク(図13では駆動軸(240)を反時計回り方向に回転させるための駆動トルク(T1))を発生させるように構成されている。なお、図13には、駆動用コイル(256a,256b,256c)を流れる電流と等価の電流IM1が示されている。
図14は、ベアリングレスモータ(250)において発生する磁石磁束φ1と支持用磁束(駆動軸(240)のラジアル荷重を非接触で支持するために生じる支持用磁束BS1)とを例示している。支持用磁束BS1は、支持用コイル(257a,257b,257c)を流れる電流に応じて発生する磁束である。ベアリングレスモータ(250)は、これらの磁石磁束φ1と支持用磁束BS1との相互作用によって、駆動軸(240)のラジアル荷重を非接触で支持するため支持力(図14では駆動軸(240)を右方向に作用する支持力(F1))を発生させるように構成されている。なお、図14には、支持用コイル(257a,257b,257c)を流れる電流と等価の電流IS1が示されている。
図15は、ベアリングレスモータ(250)において発生する磁石磁束φ1と駆動用磁束BM1と支持用磁束BS1とを例示している。ベアリングレスモータ(250)は、これらの磁石磁束φ1と駆動用磁束BM1と支持用磁束BS1との相互作用によって、駆動トルク(T1)および支持力(F1)を同時に発生させるように構成されている。なお、図15には、駆動用コイル(256a,256b,256c)を流れる電流と等価の電流IM1と、支持用コイル(257a,257b,257c)を流れる電流と等価の電流IS1が示されている。
-ラジアル磁気軸受(磁気軸受)-
ラジアル磁気軸受(260)は、複数の電磁石(この例では第1~第4電磁石(261~264))を有して駆動軸(240)のラジアル荷重を非接触で支持するように構成されている。
ラジアル磁気軸受(260)は、複数の電磁石(この例では第1~第4電磁石(261~264))を有して駆動軸(240)のラジアル荷重を非接触で支持するように構成されている。
図16に示すように、この例では、ラジアル磁気軸受(260)は、ヘテロポーラ型のラジアル磁気軸受を構成している。第1および第2電磁石(261,262)は、駆動軸(240)を挟んで互いに対向し、第1および第2電磁石(261,262)の合成電磁力により駆動軸(240)を非接触に支持する。第3および第4電磁石(263,264)は、駆動軸(240)を挟んで互いに対向し、第3および第4電磁石(263,264)の合成電磁力により駆動軸(240)を非接触に支持する。第3および第4電磁石(263,264)の対向方向(図16では右肩下がり方向)は、平面視において第1および第2電磁石(261,262)の対向方向(図16では右肩上がり方向)と直交している。
具体的には、ラジアル磁気軸受(260)は、磁気軸受コア(265)と、複数(この例では8つ)のコイル(268)とを備えている。磁気軸受コア(265)は、例えば、複数の電磁鋼板が積層されて構成され、バックヨーク(266)と複数(この例では8つ)のティース(267)とを有している。バックヨーク(266)は、円筒状に形成されている。8つのティース(267)は、バックヨーク(266)の内周面に沿うように所定間隔(この例では45°間隔)で周方向に配列され、それぞれがバックヨーク(266)の内周面から径方向内方へ向けて突出し、それぞれの内周面(突端面)が駆動軸(240)の外周面と所定のギャップを隔てて対向している。
8つのコイル(268)は、磁気軸受コア(265)の8つのティース(267)にそれぞれ巻回されている。これにより、この例では、8つの電磁石部(第1~第8電磁石部(271~278))が構成されている。具体的には、図16における時計回り方向において、第1電磁石部(271)と第2電磁石部(272)と第7電磁石部(277)と第8電磁石部(278)と第3電磁石部(273)と第4電磁石部(274)と第5電磁石部(275)と第6電磁石部(276)とが順に配列されている。
第1および第2電磁石部(271,272)は、それぞれのコイル(268)が直列に接続されて第1電磁石(261)を構成している。第3および第4電磁石部(273,274)は、それぞれのコイル(268)が直列に接続されて第2電磁石(262)を構成している。そして、第1電磁石(261)のコイル(すなわち第1および第2電磁石部(271,272)のコイル(268))に流れる電流と第2電磁石(262)のコイル(すなわち第3および第4電磁石部(273,274)のコイル(268))に流れる電流とを制御することにより、第1および第2電磁石(261,262)の合成電磁力を制御して第1および第2電磁石(261,262)の対向方向(すなわち径方向、図16では右肩上がり方向)における駆動軸(240)の位置を制御することができる。
第5および第6電磁石部(275,276)は、それぞれのコイル(268)が直列に接続されて第3電磁石(263)を構成している。第7および第8電磁石部(278)は、それぞれのコイル(268)が直列に接続されて第4電磁石(264)を構成している。そして、第3電磁石(263)のコイル(すなわち第5および第6電磁石部(275,276)のコイル(268))に流れる電流と第4電磁石(264)のコイル(すなわち第7および第8電磁石部(278)のコイル(268))に流れる電流とを制御することにより、第3および第4電磁石(263,264)の合成電磁力を制御して第3および第4電磁石(263,264)の対向方向(すなわち第1および第2電磁石(261,262)の対向方向と直交する径方向、図16では右肩下がり方向)における駆動軸(240)の位置を制御することができる。
なお、コイル(268)の巻回方向およびコイル(268)に流れる電流の向きは、第1~第4電磁石(261~264)の各々に吸引力(すなわち駆動軸(240)を引き寄せる方向に作用する電磁力)が発生するように設定されている。具体的には、コイル(268)の巻回方向およびコイル(268)に流れる電流の向きは、図16に示した矢印の方向に磁束が発生するように設定されている。
-タッチダウン軸受-
第1タッチダウン軸受(231)は、駆動軸(240)の一端部(図11では右端部)の近傍に設けられ、第2タッチダウン軸受(232)は、駆動軸(240)の他端部(図11では左端部)の近傍に設けられている。第1および第2タッチダウン軸受(231,232)は、ベアリングレスモータ(250)およびラジアル磁気軸受(260)が非通電であるとき(すなわち駆動軸(240)が浮上していないとき)に駆動軸(240)を支持するように構成されている。
第1タッチダウン軸受(231)は、駆動軸(240)の一端部(図11では右端部)の近傍に設けられ、第2タッチダウン軸受(232)は、駆動軸(240)の他端部(図11では左端部)の近傍に設けられている。第1および第2タッチダウン軸受(231,232)は、ベアリングレスモータ(250)およびラジアル磁気軸受(260)が非通電であるとき(すなわち駆動軸(240)が浮上していないとき)に駆動軸(240)を支持するように構成されている。
-スラスト磁気軸受-
スラスト磁気軸受(233)は、第1および第2スラスト電磁石(233a,233b)を有し、駆動軸(240)の円盤部(241)を電磁力によって非接触で支持するように構成されている。具体的には、第1および第2スラスト電磁石(233a,233b)は、それぞれが円環状に形成され、駆動軸(240)の円盤部(241)を挟んで互いに対向し、第1および第2スラスト電磁石(233a,233b)の合成電磁力により駆動軸(240)の円盤部(241)を非接触に支持する。すなわち、第1および第2スラスト電磁石(233a,233b)に流れる電流を制御することにより、第1および第2スラスト電磁石(233a,233b)の合成電磁力を制御して第1および第2スラスト電磁石(233a,233b)の対向方向(すなわち軸方向、図11では左右方向)における駆動軸(240)の位置を制御することができる。
スラスト磁気軸受(233)は、第1および第2スラスト電磁石(233a,233b)を有し、駆動軸(240)の円盤部(241)を電磁力によって非接触で支持するように構成されている。具体的には、第1および第2スラスト電磁石(233a,233b)は、それぞれが円環状に形成され、駆動軸(240)の円盤部(241)を挟んで互いに対向し、第1および第2スラスト電磁石(233a,233b)の合成電磁力により駆動軸(240)の円盤部(241)を非接触に支持する。すなわち、第1および第2スラスト電磁石(233a,233b)に流れる電流を制御することにより、第1および第2スラスト電磁石(233a,233b)の合成電磁力を制御して第1および第2スラスト電磁石(233a,233b)の対向方向(すなわち軸方向、図11では左右方向)における駆動軸(240)の位置を制御することができる。
-各種センサ-
電動機システム(230)の各部には、位置センサや電流センサや回転速度センサなどの各種センサ(図示を省略)が設けられている。例えば、ベアリングレスモータ(250)には、回転子(251)のラジアル方向(径方向)における位置に応じた検出信号を出力する位置センサ(図示を省略)が設けられ、ラジアル磁気軸受(260)には、駆動軸(240)のラジアル方向における位置に応じた検出信号を出力する位置センサ(図示を省略)が設けられ、スラスト磁気軸受(233)には、駆動軸(240)のスラスト方向(軸方向)における位置に応じた検出信号を出力する位置センサ(図示を省略)が設けられている。これらの位置センサは、例えば、測定対象物との間のギャップ(距離)を検出する渦電流式の変位センサによって構成されている。
電動機システム(230)の各部には、位置センサや電流センサや回転速度センサなどの各種センサ(図示を省略)が設けられている。例えば、ベアリングレスモータ(250)には、回転子(251)のラジアル方向(径方向)における位置に応じた検出信号を出力する位置センサ(図示を省略)が設けられ、ラジアル磁気軸受(260)には、駆動軸(240)のラジアル方向における位置に応じた検出信号を出力する位置センサ(図示を省略)が設けられ、スラスト磁気軸受(233)には、駆動軸(240)のスラスト方向(軸方向)における位置に応じた検出信号を出力する位置センサ(図示を省略)が設けられている。これらの位置センサは、例えば、測定対象物との間のギャップ(距離)を検出する渦電流式の変位センサによって構成されている。
-制御部-
制御部(280)は、駆動軸(240)が非接触で支持された状態で駆動軸(240)の回転速度が予め定められた目標回転速度となるように、電動機システム(230)の各部に設けられた各種センサからの検出信号や駆動軸(240)の目標回転速度などの情報に基づいて、モータ電圧指令値とラジアル電圧指令値とスラスト電圧指令値とを生成して出力するように構成されている。モータ電圧指令値は、ベアリングレスモータ(250)の固定子(254)のコイル(図示を省略)に供給される電圧を制御するための指令値である。ラジアル電圧指令値は、ラジアル磁気軸受(260)の第1~第4電磁石(261~264)のコイル(268)に供給される電圧を制御するための指令値である。スラスト電圧指令値は、スラスト磁気軸受(233)の第1および第2スラスト電磁石(233a,233b)のコイル(図示を省略)に供給される電圧を制御するための指令値である。制御部(280)は、例えば、CPUなどの演算処理部や、演算処理部を動作させるためのプログラムや情報を記憶するメモリなどの記憶部などによって構成されている。
制御部(280)は、駆動軸(240)が非接触で支持された状態で駆動軸(240)の回転速度が予め定められた目標回転速度となるように、電動機システム(230)の各部に設けられた各種センサからの検出信号や駆動軸(240)の目標回転速度などの情報に基づいて、モータ電圧指令値とラジアル電圧指令値とスラスト電圧指令値とを生成して出力するように構成されている。モータ電圧指令値は、ベアリングレスモータ(250)の固定子(254)のコイル(図示を省略)に供給される電圧を制御するための指令値である。ラジアル電圧指令値は、ラジアル磁気軸受(260)の第1~第4電磁石(261~264)のコイル(268)に供給される電圧を制御するための指令値である。スラスト電圧指令値は、スラスト磁気軸受(233)の第1および第2スラスト電磁石(233a,233b)のコイル(図示を省略)に供給される電圧を制御するための指令値である。制御部(280)は、例えば、CPUなどの演算処理部や、演算処理部を動作させるためのプログラムや情報を記憶するメモリなどの記憶部などによって構成されている。
-電源部-
電源部(281)は、制御部(280)から出力されたモータ電圧指令値とラジアル電圧指令値とスラスト電圧指令値とに基づいて、ベアリングレスモータ(250)の固定子(254)のコイル(具体的には駆動用コイル(256a,256b,256c)と支持用コイル(257a,257b,257c))とラジアル磁気軸受(260)の第1~第4電磁石(261~264)のコイル(268)とスラスト磁気軸受(233)の第1および第2スラスト電磁石(233a,233b)のコイル(図示を省略)に電圧をそれぞれ供給するように構成されている。電源部(281)は、例えば、PWM(Pulse Width Modulation)アンプによって構成されている。
電源部(281)は、制御部(280)から出力されたモータ電圧指令値とラジアル電圧指令値とスラスト電圧指令値とに基づいて、ベアリングレスモータ(250)の固定子(254)のコイル(具体的には駆動用コイル(256a,256b,256c)と支持用コイル(257a,257b,257c))とラジアル磁気軸受(260)の第1~第4電磁石(261~264)のコイル(268)とスラスト磁気軸受(233)の第1および第2スラスト電磁石(233a,233b)のコイル(図示を省略)に電圧をそれぞれ供給するように構成されている。電源部(281)は、例えば、PWM(Pulse Width Modulation)アンプによって構成されている。
ベアリングレスモータ(250)の固定子(254)のコイル(具体的には駆動用コイル(256a,256b,256c)と支持用コイル(257a,257b,257c))に印加される電圧を制御することにより、固定子(254)のコイルを流れる電流を制御してベアリングレスモータ(250)において発生する磁束(具体的には駆動用磁束BM1と支持用磁束BS1)を制御することができる。また、ラジアル磁気軸受(260)の第1~第4電磁石(261~264)のコイル(268)に供給される電圧を制御することにより、第1~第4電磁石(261~264)のコイル(268)を流れる電流を制御して第1~第4電磁石(261~264)の合成電磁力を制御することができる。これと同様に、スラスト磁気軸受(233)の第1および第2スラスト電磁石(233a,233b)のコイル(図示を省略)に供給される電圧を制御することにより、第1および第2スラスト電磁石(233a,233b)のコイルを流れる電流を制御して第1および第2スラスト電磁石(233a,233b)の合成電磁力を制御することができる。
-ベアリングレスモータとラジアル磁気軸受の配置-
ラジアル磁気軸受(260)は、駆動軸(240)の軸方向において、ベアリングレスモータ(250)において支持されるラジアル荷重よりも大きいラジアル荷重が作用する位置に配置されている。この例では、駆動軸(240)の一端部に負荷(220)(この例ではインペラ(221))が接続されている。そして、ラジアル磁気軸受(260)は、駆動軸(240)の軸方向においてベアリングレスモータ(250)よりも負荷(220)に近い位置(この例ではインペラ(221)に近い位置)に配置されている。なお、駆動軸(240)の軸方向における位置が駆動軸(240)の一端部(すなわち負荷(220))に近くなるに連れて、その位置における駆動軸(240)のラジアル荷重が大きくなる傾向にある。したがって、駆動軸(240)の軸方向においてベアリングレスモータ(250)よりも負荷(220)に近い位置にラジアル磁気軸受(260)を配置することにより、駆動軸(240)の一端部に負荷(220)が接続された電動機システム(230)において、駆動軸(240)のラジアル荷重が比較的に大きくなる位置にラジアル磁気軸受(260)を配置し、駆動軸(240)のラジアル荷重が比較的に小さくなる位置にベアリングレスモータ(250)を配置することができる。
ラジアル磁気軸受(260)は、駆動軸(240)の軸方向において、ベアリングレスモータ(250)において支持されるラジアル荷重よりも大きいラジアル荷重が作用する位置に配置されている。この例では、駆動軸(240)の一端部に負荷(220)(この例ではインペラ(221))が接続されている。そして、ラジアル磁気軸受(260)は、駆動軸(240)の軸方向においてベアリングレスモータ(250)よりも負荷(220)に近い位置(この例ではインペラ(221)に近い位置)に配置されている。なお、駆動軸(240)の軸方向における位置が駆動軸(240)の一端部(すなわち負荷(220))に近くなるに連れて、その位置における駆動軸(240)のラジアル荷重が大きくなる傾向にある。したがって、駆動軸(240)の軸方向においてベアリングレスモータ(250)よりも負荷(220)に近い位置にラジアル磁気軸受(260)を配置することにより、駆動軸(240)の一端部に負荷(220)が接続された電動機システム(230)において、駆動軸(240)のラジアル荷重が比較的に大きくなる位置にラジアル磁気軸受(260)を配置し、駆動軸(240)のラジアル荷重が比較的に小さくなる位置にベアリングレスモータ(250)を配置することができる。
-実施形態3の効果-
以上のように、この実施形態による電動機システム(230)では、ベアリングレスモータ(250)とラジアル磁気軸受(260)とを用いて駆動軸(240)の回転駆動および非接触支持を行うことにより、ベアリングレスモータ(250)の代わりに駆動軸(240)の回転駆動のみを行うモータと駆動軸(240)の非接触支持のみを行う磁気軸受とが設けられている場合よりも、電動機システム(230)を小型化することができる。具体的には、駆動軸(240)を短くすることができる。
以上のように、この実施形態による電動機システム(230)では、ベアリングレスモータ(250)とラジアル磁気軸受(260)とを用いて駆動軸(240)の回転駆動および非接触支持を行うことにより、ベアリングレスモータ(250)の代わりに駆動軸(240)の回転駆動のみを行うモータと駆動軸(240)の非接触支持のみを行う磁気軸受とが設けられている場合よりも、電動機システム(230)を小型化することができる。具体的には、駆動軸(240)を短くすることができる。
また、この実施形態による電動機システム(230)では、ラジアル磁気軸受(260)において支持されるラジアル荷重は、ベアリングレスモータ(250)において支持されるラジアル荷重よりも大きくなっている。すなわち、駆動軸(240)のラジアル荷重が比較的に大きくなる位置にラジアル磁気軸受(260)が配置され、駆動軸(240)のラジアル荷重が比較的に小さくなる位置にベアリングレスモータ(250)が配置されている。
なお、ベアリングレスモータ(250)では、電磁力を支持力(駆動軸(240)を非接触で支持するための力)と駆動力(駆動軸(240)を回転駆動させるための力)とに割り当てることになるが、ラジアル磁気軸受(260)では、電磁力を全て支持力に割り当てることが可能である。そのため、ラジアル磁気軸受(260)は、ベアリングレスモータ(250)よりも大きな支持力を発生させることが可能である。
したがって、駆動軸(240)のラジアル荷重が比較的に大きくなる位置にラジアル磁気軸受(260)を配置し、駆動軸(240)のラジアル荷重が比較的に小さくなる位置にベアリングレスモータ(250)を配置することにより、駆動軸(240)の支持力(駆動軸(240)を非接触で支持するための力)を確保することができる。
また、駆動軸(240)の支持力を確保しつつ電動機システム(230)を小型化することができるので、ターボ圧縮機(210)を小型化することができる。
なお、電動機システム(230)では、負荷(220)(この例ではインペラ(221))と駆動軸(240)とを含む回転系は、その軸方向長さが短くなるほど共振周波数が高くなる傾向にある。したがって、駆動軸(240)を短くすることにより、負荷(220)と駆動軸(240)とを含む回転系の共振周波数を高くすることができる。これにより、電動機システム(230)を安全に運転することが可能な安全運転領域を拡張することができる。
〈ベアリングレスモータの変形例〉
図17に示すように、ベアリングレスモータ(250)は、表面磁石型のベアリングレスモータによって構成されていてもよい。図17に示した表面磁石型のベアリングレスモータ(250)では、回転子(251)は、回転子コア(252)と、回転子コア(252)の外周面に設けられた複数(この例では8つ)の永久磁石(253)と、複数の永久磁石(253)の外周を囲う保護部材(258)とを有している。複数の永久磁石(253)は、回転子(251)の周方向において所定の角度ピッチで配置されている。この例では、8つの永久磁石(253)が回転子(251)の周方向において45°の角度ピッチで配置されている。また、永久磁石(253)は、回転子コア(252)の外周面に沿う形状(円弧状)に形成されている。なお、8つの永久磁石(253)は、互いに同形状となっている。そして、8つの永久磁石(253)は、それぞれの外周面および内周面が磁極面(S極面/N極面)となり回転子(251)の周方向に異なる磁極(S極/N極)が交互に並ぶように構成されている。保護部材(258)は、円筒状に形成され、複数の永久磁石(253)の外周に設けられている。
図17に示すように、ベアリングレスモータ(250)は、表面磁石型のベアリングレスモータによって構成されていてもよい。図17に示した表面磁石型のベアリングレスモータ(250)では、回転子(251)は、回転子コア(252)と、回転子コア(252)の外周面に設けられた複数(この例では8つ)の永久磁石(253)と、複数の永久磁石(253)の外周を囲う保護部材(258)とを有している。複数の永久磁石(253)は、回転子(251)の周方向において所定の角度ピッチで配置されている。この例では、8つの永久磁石(253)が回転子(251)の周方向において45°の角度ピッチで配置されている。また、永久磁石(253)は、回転子コア(252)の外周面に沿う形状(円弧状)に形成されている。なお、8つの永久磁石(253)は、互いに同形状となっている。そして、8つの永久磁石(253)は、それぞれの外周面および内周面が磁極面(S極面/N極面)となり回転子(251)の周方向に異なる磁極(S極/N極)が交互に並ぶように構成されている。保護部材(258)は、円筒状に形成され、複数の永久磁石(253)の外周に設けられている。
図18は、図17に示した表面磁石型のベアリングレスモータ(250)において発生する磁石磁束φ1と駆動用磁束BM1と支持用磁束BS1とを例示している。図12に示したコンセクエントポール型のベアリングレスモータ(250)と同様に、図17および図18に示した表面磁石型のベアリングレスモータ(250)は、これらの磁石磁束φ1と駆動用磁束BM1と支持用磁束BS1との相互作用によって、駆動トルク(T1)および支持力(F1)を同時に発生させるように構成されている。
また、図17および図18に示すように、表面磁石型のベアリングレスモータ(250)における永久磁石(253)の数(この例では8つ)は、図12に示したコンセクエントポール型のベアリングレスモータ(250)における永久磁石(253)の数(図12の例では4つ)よりも多くなっている。そのため、表面磁石型のベアリングレスモータ(250)は、コンセクエントポール型のベアリングレスモータ(250)よりも、磁石磁束φ1の磁束密度が高くなっている。したがって、表面磁石型のベアリングレスモータ(250)は、コンセクエントポール型のベアリングレスモータ(250)よりも、大きな駆動トルク(T1)を発生させることができる。
また、この例では、図17に示した表面磁石型のベアリングレスモータ(250)は、図12に示したコンセクエントポール型のベアリングレスモータ(250)よりも、回転子(251)の周方向における複数の永久磁石(253)の間隔が狭くなっている。具体的には、図12に示したコンセクエントポール型のベアリングレスモータ(250)では、回転子(251)の周方向における複数の永久磁石(253)の間隔が永久磁石(253)の周方向長さと同等となっているが、図17に示した表面磁石型のベアリングレスモータ(250)では、回転子(251)の周方向における複数の永久磁石(253)の間隔が永久磁石(253)の周方向長さよりも狭くなっており、複数の永久磁石(253)が回転子コア(252)のほぼ全周を覆っている。
以上のように、ベアリングレスモータ(250)を表面磁石型のベアリングレスモータによって構成することにより、コンセクエントポール型のベアリングレスモータによってベアリングレスモータ(250)を構成する場合よりも、ベアリングレスモータ(250)における駆動力(駆動軸(240)を回転駆動させるための力)を大きくすることができる。
《発明の実施形態4》
本発明の実施形態4について説明する。
本発明の実施形態4について説明する。
〈空気調和機〉
図19は、実施形態による空気調和装置(500)の構成を例示している。空気調和装置(500)は、冷媒回路(510)を備えている。冷媒回路(510)は、ターボ圧縮機(410)と凝縮器(520)と膨張弁(530)と蒸発器(540)とを有し、冷媒が循環して冷凍サイクルが行われるように構成されている。例えば、凝縮器(520)および蒸発器(540)は、クロスフィン型の熱交換器により構成され、膨張弁(530)は、電動弁により構成されている。
図19は、実施形態による空気調和装置(500)の構成を例示している。空気調和装置(500)は、冷媒回路(510)を備えている。冷媒回路(510)は、ターボ圧縮機(410)と凝縮器(520)と膨張弁(530)と蒸発器(540)とを有し、冷媒が循環して冷凍サイクルが行われるように構成されている。例えば、凝縮器(520)および蒸発器(540)は、クロスフィン型の熱交換器により構成され、膨張弁(530)は、電動弁により構成されている。
〈ターボ圧縮機〉
図20は、図19に示したターボ圧縮機(410)の構成を例示している。ターボ圧縮機(410)は、冷媒回路(510)に設けられて冷媒を圧縮するように構成されている。この例では、ターボ圧縮機(410)は、ケーシング(411)と、インペラ(421)と、電動機システム(430)とを備えている。電動機システム(430)は、駆動軸(440)と、ベアリングレスモータ(450)と、ラジアル磁気軸受(460)と、制御部(480)と、電源部(481)とを有している。また、この例では、電動機システム(430)は、第1タッチダウン軸受(431)と、第2タッチダウン軸受(432)と、スラスト磁気軸受(433)とをさらに有している。
図20は、図19に示したターボ圧縮機(410)の構成を例示している。ターボ圧縮機(410)は、冷媒回路(510)に設けられて冷媒を圧縮するように構成されている。この例では、ターボ圧縮機(410)は、ケーシング(411)と、インペラ(421)と、電動機システム(430)とを備えている。電動機システム(430)は、駆動軸(440)と、ベアリングレスモータ(450)と、ラジアル磁気軸受(460)と、制御部(480)と、電源部(481)とを有している。また、この例では、電動機システム(430)は、第1タッチダウン軸受(431)と、第2タッチダウン軸受(432)と、スラスト磁気軸受(433)とをさらに有している。
なお、以下の説明において、「軸方向」とは、回転軸方向のことであって、駆動軸(440)の軸心の方向のことであり、「径方向」とは、駆動軸(440)の軸方向と直交する方向のことである。また、「外周側」とは、駆動軸(440)の軸心からより遠い側のことであり、「内周側」とは、駆動軸(440)の軸心により近い側のことである。
-ケーシング-
ケーシング(411)は、両端が閉塞された円筒状に形成され、円筒軸線が水平向きとなるように配置されている。ケーシング(411)内の空間は、壁部(411a)によって区画され、壁部(411a)よりも右側の空間がインペラ(421)を収容するインペラ室(S401)を構成し、壁部(411a)よりも左側の空間がベアリングレスモータ(450)を収容する電動機室(S402)を構成している。また、電動機室(S402)には、ベアリングレスモータ(450)とラジアル磁気軸受(460)と第1タッチダウン軸受(431)と第2タッチダウン軸受(432)とスラスト磁気軸受(433)が収容され、これらが電動機室(S402)の内周壁に固定されている。
ケーシング(411)は、両端が閉塞された円筒状に形成され、円筒軸線が水平向きとなるように配置されている。ケーシング(411)内の空間は、壁部(411a)によって区画され、壁部(411a)よりも右側の空間がインペラ(421)を収容するインペラ室(S401)を構成し、壁部(411a)よりも左側の空間がベアリングレスモータ(450)を収容する電動機室(S402)を構成している。また、電動機室(S402)には、ベアリングレスモータ(450)とラジアル磁気軸受(460)と第1タッチダウン軸受(431)と第2タッチダウン軸受(432)とスラスト磁気軸受(433)が収容され、これらが電動機室(S402)の内周壁に固定されている。
-駆動軸-
駆動軸(440)は、インペラ(421)を回転駆動するために設けられている。この例では、駆動軸(440)は、ケーシング(411)内を軸方向に延びてインペラ(421)とベアリングレスモータ(450)とを連結している。具体的には、駆動軸(440)の一端部にインペラ(421)が固定され、駆動軸(440)の中間部にベアリングレスモータ(450)が配置されている。また、駆動軸(440)の他端部(すなわちインペラ(421)が固定された一端部とは反対側の端部)には、円盤状の部分(以下「円盤部(441)と記載」)が設けられている。なお、円盤部(441)は、磁性材料(例えば鉄)で構成されている。
駆動軸(440)は、インペラ(421)を回転駆動するために設けられている。この例では、駆動軸(440)は、ケーシング(411)内を軸方向に延びてインペラ(421)とベアリングレスモータ(450)とを連結している。具体的には、駆動軸(440)の一端部にインペラ(421)が固定され、駆動軸(440)の中間部にベアリングレスモータ(450)が配置されている。また、駆動軸(440)の他端部(すなわちインペラ(421)が固定された一端部とは反対側の端部)には、円盤状の部分(以下「円盤部(441)と記載」)が設けられている。なお、円盤部(441)は、磁性材料(例えば鉄)で構成されている。
-インペラ-
インペラ(421)は、複数の羽根によって外形が略円錐形状となるように形成され、駆動軸(440)の一端部に固定された状態で、インペラ室(S401)に収容されている。インペラ室(S401)には、吸入管(P401)と吐出管(P402)とが接続されている。吸入管(P401)は、冷媒(流体)を外部からインペラ室(S401)に導くために設けられている。吐出管(P402)は、インペラ室(S401)内で圧縮された高圧の冷媒(流体)を外部へ戻すために設けられている。すなわち、この例では、インペラ(421)とインペラ室(S401)とによって圧縮機構が構成されている。
インペラ(421)は、複数の羽根によって外形が略円錐形状となるように形成され、駆動軸(440)の一端部に固定された状態で、インペラ室(S401)に収容されている。インペラ室(S401)には、吸入管(P401)と吐出管(P402)とが接続されている。吸入管(P401)は、冷媒(流体)を外部からインペラ室(S401)に導くために設けられている。吐出管(P402)は、インペラ室(S401)内で圧縮された高圧の冷媒(流体)を外部へ戻すために設けられている。すなわち、この例では、インペラ(421)とインペラ室(S401)とによって圧縮機構が構成されている。
-ベアリングレスモータ-
ベアリングレスモータ(450)は、一対の回転子(451)と固定子(454)とを有して駆動軸(440)を回転駆動し且つ駆動軸(440)のラジアル荷重を非接触で支持するように構成されている。回転子(451)は、駆動軸(440)に固定され、固定子(454)は、ケーシング(411)の内周壁に固定されている。
ベアリングレスモータ(450)は、一対の回転子(451)と固定子(454)とを有して駆動軸(440)を回転駆動し且つ駆動軸(440)のラジアル荷重を非接触で支持するように構成されている。回転子(451)は、駆動軸(440)に固定され、固定子(454)は、ケーシング(411)の内周壁に固定されている。
図21に示すように、この例では、ベアリングレスモータ(450)は、コンセクエントポール型のベアリングレスモータによって構成されている。
ベアリングレスモータ(450)の回転子(451)は、回転子コア(452)と、回転子コア(452)に埋設された複数(この例では4つ)の永久磁石(453)とを有している。回転子コア(452)は、磁性材料(例えば積層鋼板)で構成され、円柱状に形成されている。回転子コア(452)の中央部には、駆動軸(440)を挿通するためのシャフト孔が形成されている。
複数の永久磁石(453)は、回転子(451)の周方向において所定の角度ピッチで配置されている。この例では、4つの永久磁石(453)が回転子(451)の周方向において90°の角度ピッチで配置されている。また、この例では、永久磁石(453)は、回転子コア(452)の外周面の近傍(外周部)に埋設され、回転子コア(452)の外周面に沿う形状(円弧状)に形成されている。また、4つの永久磁石(453)は、互いに同形状となっている。そして、4つの永久磁石(453)の外周面側がN極となっており、回転子コア(452)の外周面のうち回転子(451)の周方向において4つの永久磁石(453)の間に位置する部分が擬似的にS極となっている。なお、4つの永久磁石(453)の外周面側がS極となっていてもよい。この場合、回転子コア(452)の外周面のうち回転子(451)の周方向において4つの永久磁石(453)の間に位置する部分が擬似的にN極となる。
ベアリングレスモータ(450)の固定子(454)は、磁性材料(例えば積層鋼板)で構成され、バックヨーク部(455)と、複数のティース部(図示を省略)と、ティース部に巻回された駆動用コイル(456b,456b,456c)および支持用コイル(457a,457b,457c)とを有している。バックヨーク部(455)は、円筒状に形成されている。駆動用コイル(456b,456b,456c)および支持用コイル(457a,457b,457c)は、各ティース部に分布巻方式で巻回されている。なお、駆動用コイル(456b,456b,456c)および支持用コイル(457a,457b,457c)は、各ティース部に集中巻方式で巻回されていてもよい。
駆動用コイル(456b,456b,456c)は、ティース部のうち内周側に巻回されたコイルである。駆動用コイル(456b,456b,456c)は、図21において太実線で囲んで示したU相駆動用コイル(456b)と、図21において太破線で囲んで示したV相駆動用コイル(456b)と、図21において細実線で囲んで示したW相駆動用コイル(456c)とから構成されている。
支持用コイル(457a,457b,457c)は、ティース部のうち外周側に巻回されたコイルである。支持用コイル(457a,457b,457c)は、図21において太実線で囲んで示したU相支持用コイル(457a)と、図21において太破線で囲んで示したV相支持用コイル(457b)と、図21において細実線で囲んで示したW相支持用コイル(457c)とから構成されている。
図22は、ベアリングレスモータ(450)において発生する磁石磁束(永久磁石(453)によって生じる磁石磁束φ1)と駆動用磁束(駆動軸(440)を回転駆動するために生じる駆動用磁束BM1)とを例示している。駆動用磁束BM1は、駆動用コイル(456b,456b,456c)を流れる電流に応じて発生する磁束である。ベアリングレスモータ(450)は、これらの磁石磁束φ1と駆動用磁束BM1との相互作用によって、駆動軸(440)を回転させるための駆動トルク(図22では駆動軸(440)を反時計回り方向に回転させるための駆動トルク(T1))を発生させるように構成されている。なお、図22には、駆動用コイル(456b,456b,456c)を流れる電流と等価の電流IM1が示されている。
図23は、ベアリングレスモータ(450)において発生する磁石磁束φ1と支持用磁束(駆動軸(440)のラジアル荷重を非接触で支持するために生じる支持用磁束BS1)とを例示している。支持用磁束BS1は、支持用コイル(457a,457b,457c)を流れる電流に応じて発生する磁束である。ベアリングレスモータ(450)は、これらの磁石磁束φ1と支持用磁束BS1との相互作用によって、駆動軸(440)のラジアル荷重を非接触で支持するため支持力(図23では駆動軸(440)を右方向に作用する支持力(F1))を発生させるように構成されている。なお、図23には、支持用コイル(457a,457b,457c)を流れる電流と等価の電流IS1が示されている。
図24は、ベアリングレスモータ(450)において発生する磁石磁束φ1と駆動用磁束BM1と支持用磁束BS1とを例示している。ベアリングレスモータ(450)は、これらの磁石磁束φ1と駆動用磁束BM1と支持用磁束BS1との相互作用によって、駆動トルク(T1)および支持力(F1)を同時に発生させるように構成されている。なお、図24には、駆動用コイル(456b,456b,456c)を流れる電流と等価の電流IM1と、支持用コイル(457a,457b,457c)を流れる電流と等価の電流IS1が示されている。
-ラジアル磁気軸受(磁気軸受)-
ラジアル磁気軸受(460)は、複数の電磁石(この例では第1~第4電磁石(461~464))を有して駆動軸(440)のラジアル荷重を非接触で支持するように構成されている。
ラジアル磁気軸受(460)は、複数の電磁石(この例では第1~第4電磁石(461~464))を有して駆動軸(440)のラジアル荷重を非接触で支持するように構成されている。
図25に示すように、この例では、ラジアル磁気軸受(460)は、ヘテロポーラ型のラジアル磁気軸受を構成している。第1および第2電磁石(461,462)は、駆動軸(440)を挟んで互いに対向し、第1および第2電磁石(461,462)の合成電磁力により駆動軸(440)を非接触で支持する。第3および第4電磁石(463,464)は、駆動軸(440)を挟んで互いに対向し、第3および第4電磁石(463,464)の合成電磁力により駆動軸(440)を非接触で支持する。第3および第4電磁石(463,464)の対向方向(図25では右肩下がり方向)は、平面視において第1および第2電磁石(461,462)の対向方向(図25では右肩上がり方向)と直交している。
具体的には、ラジアル磁気軸受(460)は、磁気軸受コア(465)と、複数(この例では8つ)のコイル(468)とを備えている。磁気軸受コア(465)は、例えば、複数の電磁鋼板が積層されて構成され、バックヨーク(466)と複数(この例では8つ)のティース(467)とを有している。バックヨーク(466)は、円筒状に形成されている。8つのティース(467)は、バックヨーク(466)の内周面に沿うように所定間隔(この例では45°間隔)で周方向に配列され、それぞれがバックヨーク(466)の内周面から径方向内方へ向けて突出し、それぞれの内周面(突端面)が駆動軸(440)の外周面と所定のギャップを隔てて対向している。
8つのコイル(468)は、磁気軸受コア(465)の8つのティース(467)にそれぞれ巻回されている。これにより、この例では、8つの電磁石部(第1~第8電磁石部(471~478))が構成されている。具体的には、図25における時計回り方向において、第1電磁石部(471)と第2電磁石部(472)と第7電磁石部(477)と第8電磁石部(478)と第3電磁石部(473)と第4電磁石部(474)と第5電磁石部(475)と第6電磁石部(476)とが順に配列されている。
第1および第2電磁石部(471,472)は、それぞれのコイル(468)が直列に接続されて第1電磁石(461)を構成している。第3および第4電磁石部(473,474)は、それぞれのコイル(468)が直列に接続されて第2電磁石(462)を構成している。そして、第1電磁石(461)のコイル(すなわち第1および第2電磁石部(471,472)のコイル(468))に流れる電流と第2電磁石(462)のコイル(すなわち第3および第4電磁石部(473,474)のコイル(468))に流れる電流とを制御することにより、第1および第2電磁石(461,462)の合成電磁力を制御して第1および第2電磁石(461,462)の対向方向(すなわち径方向、図25では右肩上がり方向)における駆動軸(440)の位置を制御することができる。
第5および第6電磁石部(475,476)は、それぞれのコイル(468)が直列に接続されて第3電磁石(463)を構成している。第7および第8電磁石部(477,478)は、それぞれのコイル(468)が直列に接続されて第4電磁石(464)を構成している。そして、第3電磁石(463)のコイル(すなわち第5および第6電磁石部(475,476)のコイル(468))に流れる電流と第4電磁石(464)のコイル(すなわち第7および第8電磁石部(477,478)のコイル(468))に流れる電流とを制御することにより、第3および第4電磁石(463,464)の合成電磁力を制御して第3および第4電磁石(463,464)の対向方向(すなわち第1および第2電磁石(461,462)の対向方向と直交する径方向、図25では右肩下がり方向)における駆動軸(440)の位置を制御することができる。
なお、コイル(468)の巻回方向およびコイル(468)に流れる電流の向きは、第1~第4電磁石(461~464)の各々に吸引力(すなわち駆動軸(440)を引き寄せる方向に作用する電磁力)が発生するように設定されている。具体的には、コイル(468)の巻回方向およびコイル(468)に流れる電流の向きは、図25に示した矢印の方向に磁束が発生するように設定されている。
-タッチダウン軸受-
第1タッチダウン軸受(431)は、駆動軸(440)の一端部(図20では右端部)の近傍に設けられ、第2タッチダウン軸受(432)は、駆動軸(440)の他端部(図20では左端部)の近傍に設けられている。第1および第2タッチダウン軸受(431,432)は、ベアリングレスモータ(450)およびラジアル磁気軸受(460)が非通電であるとき(すなわち駆動軸(440)が浮上していないとき)に駆動軸(440)を支持するように構成されている。
第1タッチダウン軸受(431)は、駆動軸(440)の一端部(図20では右端部)の近傍に設けられ、第2タッチダウン軸受(432)は、駆動軸(440)の他端部(図20では左端部)の近傍に設けられている。第1および第2タッチダウン軸受(431,432)は、ベアリングレスモータ(450)およびラジアル磁気軸受(460)が非通電であるとき(すなわち駆動軸(440)が浮上していないとき)に駆動軸(440)を支持するように構成されている。
-スラスト磁気軸受-
スラスト磁気軸受(433)は、第1および第2スラスト電磁石(433a,433b)を有し、駆動軸(440)の円盤部(441)を電磁力によって非接触で支持するように構成されている。具体的には、第1および第2スラスト電磁石(433a,433b)は、それぞれが円環状に形成され、駆動軸(440)の円盤部(441)を挟んで互いに対向し、第1および第2スラスト電磁石(433a,433b)の合成電磁力により駆動軸(440)の円盤部(441)を非接触で支持する。すなわち、第1および第2スラスト電磁石(433a,433b)に流れる電流を制御することにより、第1および第2スラスト電磁石(433a,433b)の合成電磁力を制御して第1および第2スラスト電磁石(433a,433b)の対向方向(すなわち軸方向、図20では左右方向)における駆動軸(440)の位置を制御することができる。
スラスト磁気軸受(433)は、第1および第2スラスト電磁石(433a,433b)を有し、駆動軸(440)の円盤部(441)を電磁力によって非接触で支持するように構成されている。具体的には、第1および第2スラスト電磁石(433a,433b)は、それぞれが円環状に形成され、駆動軸(440)の円盤部(441)を挟んで互いに対向し、第1および第2スラスト電磁石(433a,433b)の合成電磁力により駆動軸(440)の円盤部(441)を非接触で支持する。すなわち、第1および第2スラスト電磁石(433a,433b)に流れる電流を制御することにより、第1および第2スラスト電磁石(433a,433b)の合成電磁力を制御して第1および第2スラスト電磁石(433a,433b)の対向方向(すなわち軸方向、図20では左右方向)における駆動軸(440)の位置を制御することができる。
-各種センサ-
電動機システム(430)の各部には、位置センサや電流センサや回転速度センサなどの各種センサ(図示を省略)が設けられている。例えば、ベアリングレスモータ(450)には、回転子(451)のラジアル方向(径方向)における位置に応じた検出信号を出力する位置センサ(図示を省略)が設けられ、ラジアル磁気軸受(460)には、駆動軸(440)のラジアル方向における位置に応じた検出信号を出力する位置センサ(図示を省略)が設けられ、スラスト磁気軸受(433)には、駆動軸(440)のスラスト方向(軸方向)における位置に応じた検出信号を出力する位置センサ(図示を省略)が設けられている。これらの位置センサは、例えば、測定対象物との間のギャップ(距離)を検出する渦電流式の変位センサによって構成されている。
電動機システム(430)の各部には、位置センサや電流センサや回転速度センサなどの各種センサ(図示を省略)が設けられている。例えば、ベアリングレスモータ(450)には、回転子(451)のラジアル方向(径方向)における位置に応じた検出信号を出力する位置センサ(図示を省略)が設けられ、ラジアル磁気軸受(460)には、駆動軸(440)のラジアル方向における位置に応じた検出信号を出力する位置センサ(図示を省略)が設けられ、スラスト磁気軸受(433)には、駆動軸(440)のスラスト方向(軸方向)における位置に応じた検出信号を出力する位置センサ(図示を省略)が設けられている。これらの位置センサは、例えば、測定対象物との間のギャップ(距離)を検出する渦電流式の変位センサによって構成されている。
-制御部-
制御部(480)は、駆動軸(440)が非接触で支持された状態で駆動軸(440)の回転速度が予め定められた目標回転速度となるように、電動機システム(430)の各部に設けられた各種センサからの検出信号や駆動軸(440)の目標回転速度などの情報に基づいて、モータ電圧指令値とラジアル電圧指令値とスラスト電圧指令値とを生成して出力するように構成されている。モータ電圧指令値は、ベアリングレスモータ(450)の固定子(454)のコイル(図示を省略)に供給される電圧を制御するための指令値である。ラジアル電圧指令値は、ラジアル磁気軸受(460)の第1~第4電磁石(461~464)のコイル(468)に供給される電圧を制御するための指令値である。スラスト電圧指令値は、スラスト磁気軸受(433)の第1および第2スラスト電磁石(433a,433b)のコイル(図示を省略)に供給される電圧を制御するための指令値である。制御部(480)は、例えば、CPUなどの演算処理部や、演算処理部を動作させるためのプログラムや情報を記憶するメモリなどの記憶部などによって構成されている。
制御部(480)は、駆動軸(440)が非接触で支持された状態で駆動軸(440)の回転速度が予め定められた目標回転速度となるように、電動機システム(430)の各部に設けられた各種センサからの検出信号や駆動軸(440)の目標回転速度などの情報に基づいて、モータ電圧指令値とラジアル電圧指令値とスラスト電圧指令値とを生成して出力するように構成されている。モータ電圧指令値は、ベアリングレスモータ(450)の固定子(454)のコイル(図示を省略)に供給される電圧を制御するための指令値である。ラジアル電圧指令値は、ラジアル磁気軸受(460)の第1~第4電磁石(461~464)のコイル(468)に供給される電圧を制御するための指令値である。スラスト電圧指令値は、スラスト磁気軸受(433)の第1および第2スラスト電磁石(433a,433b)のコイル(図示を省略)に供給される電圧を制御するための指令値である。制御部(480)は、例えば、CPUなどの演算処理部や、演算処理部を動作させるためのプログラムや情報を記憶するメモリなどの記憶部などによって構成されている。
-電源部-
電源部(481)は、制御部(480)から出力されたモータ電圧指令値とラジアル電圧指令値とスラスト電圧指令値とに基づいて、ベアリングレスモータ(450)の固定子(454)のコイル(具体的には駆動用コイル(456b,456b,456c)と支持用コイル(457a,457b,457c))とラジアル磁気軸受(460)の第1~第4電磁石(461~464)のコイル(468)とスラスト磁気軸受(433)の第1および第2スラスト電磁石(433a,433b)のコイル(図示を省略)に電圧をそれぞれ供給するように構成されている。電源部(481)は、例えば、PWM(Pulse Width Modulation)アンプによって構成されている。
電源部(481)は、制御部(480)から出力されたモータ電圧指令値とラジアル電圧指令値とスラスト電圧指令値とに基づいて、ベアリングレスモータ(450)の固定子(454)のコイル(具体的には駆動用コイル(456b,456b,456c)と支持用コイル(457a,457b,457c))とラジアル磁気軸受(460)の第1~第4電磁石(461~464)のコイル(468)とスラスト磁気軸受(433)の第1および第2スラスト電磁石(433a,433b)のコイル(図示を省略)に電圧をそれぞれ供給するように構成されている。電源部(481)は、例えば、PWM(Pulse Width Modulation)アンプによって構成されている。
ベアリングレスモータ(450)の固定子(454)のコイル(具体的には駆動用コイル(456b,456b,456c)と支持用コイル(457a,457b,457c))に印加される電圧を制御することにより、固定子(454)のコイルを流れる電流を制御してベアリングレスモータ(450)において発生する磁束(具体的には駆動用磁束BM1と支持用磁束BS1)を制御することができる。また、ラジアル磁気軸受(460)の第1~第4電磁石(461~464)のコイル(468)に供給される電圧を制御することにより、第1~第4電磁石(461~464)のコイル(468)を流れる電流を制御して第1~第4電磁石(461~464)の合成電磁力を制御することができる。これと同様に、スラスト磁気軸受(433)の第1および第2スラスト電磁石(433a,433b)のコイル(図示を省略)に供給される電圧を制御することにより、第1および第2スラスト電磁石(433a,433b)のコイルを流れる電流を制御して第1および第2スラスト電磁石(433a,433b)の合成電磁力を制御することができる。
-ターボ圧縮機の運転領域-
次に、図7を参照して、ターボ圧縮機(410)の運転領域について説明する。図7において、横軸は冷媒体積流量を示し、縦軸はヘッドを示している。図7に示すように、ターボ圧縮機(410)の運転領域は、主に、通常運転領域(A)と高負荷トルク領域(B)とタービュランス領域(C)とサージング領域(D)とに大別される。通常運転領域(A)と高負荷トルク領域(B)とタービュランス領域(C)は、図7において太線で示したサージラインの内側に位置する領域であり、サージング領域(D)は、サージラインの外側に位置する領域である。すなわち、停電時などの非常の事態においてターボ圧縮機(410)がサージング領域(D)において一時的に運転されることがある。なお、タービュランス領域(C)は、ターボ圧縮機(410)の旋回失速が生じる領域である。
次に、図7を参照して、ターボ圧縮機(410)の運転領域について説明する。図7において、横軸は冷媒体積流量を示し、縦軸はヘッドを示している。図7に示すように、ターボ圧縮機(410)の運転領域は、主に、通常運転領域(A)と高負荷トルク領域(B)とタービュランス領域(C)とサージング領域(D)とに大別される。通常運転領域(A)と高負荷トルク領域(B)とタービュランス領域(C)は、図7において太線で示したサージラインの内側に位置する領域であり、サージング領域(D)は、サージラインの外側に位置する領域である。すなわち、停電時などの非常の事態においてターボ圧縮機(410)がサージング領域(D)において一時的に運転されることがある。なお、タービュランス領域(C)は、ターボ圧縮機(410)の旋回失速が生じる領域である。
通常運転領域(A)では、駆動軸(440)の負荷トルク(駆動軸(440)を回転駆動させるために必要となるトルク)が比較的に小さくなり、駆動軸(440)のラジアル荷重も比較的に小さくなる。高負荷トルク領域(B)では、駆動軸(440)の負荷トルクが比較的に大きくなり、駆動軸(440)のラジアル荷重も比較的に大きくなる。なお、駆動軸(440)の負荷トルクは、高負荷トルク領域(B)内の所定の点(具体的には図7の右上の頂点)において最大となる。タービュランス領域(C)では、駆動軸(440)の負荷トルクが比較的に小さくなる一方で、駆動軸(440)のラジアル荷重が比較的に大きくなる。サージング領域(D)では、駆動軸(440)の負荷トルクが比較的に小さくなる一方で、駆動軸(440)のラジアル荷重が比較的に大きくなる。なお、駆動軸(440)のラジアル荷重がサージング領域(D)内の所定の点において最大となる。
このように、冷媒回路(510)に設けられて冷媒を圧縮するターボ圧縮機(410)では、駆動軸(440)の負荷トルクが最大となる運転領域(この例ではサージング領域(D))と駆動軸(440)のラジアル荷重が最大となる運転領域(この例では高負荷トルク領域(B))とが互いに異なっている。そして、駆動軸(440)のラジアル荷重が比較的に大きくなる運転領域(この例ではタービュランス領域(C)とサージング領域(D))では、駆動軸(440)の負荷トルクが比較的に小さくなる。すなわち、駆動軸(440)のラジアル荷重が比較的に大きくなる運転領域(特に駆動軸(440)のラジアル荷重が最大となる運転領域)では、駆動軸(440)の負荷トルクが比較的に小さくなるので、ベアリングレスモータ(450)の電磁力を支持力(駆動軸(440)を非接触で支持するための力)に十分に割り当てることが可能である。なお、これらの知見は、本願発明者の鋭意研究の結果得られたものである。
-ベアリングレスモータとラジアル磁気軸受の配置-
ベアリングレスモータ(450)は、駆動軸(440)の軸方向において、ラジアル磁気軸受(460)において支持されるラジアル荷重よりも大きいラジアル荷重が作用する位置に配置されている。この例では、駆動軸(440)の一端部にインペラ(421)が接続されている。そして、ベアリングレスモータ(450)は、駆動軸(440)の軸方向においてラジアル磁気軸受(460)よりもインペラ(421)に近い位置に配置されている。なお、駆動軸(440)の軸方向における位置が駆動軸(440)の一端部(すなわちインペラ(421))に近くなるに連れて、その位置における駆動軸(440)のラジアル荷重が大きくなる傾向にある。したがって、駆動軸(440)の軸方向においてラジアル磁気軸受(460)よりもインペラ(421)に近い位置にベアリングレスモータ(450)を配置することにより、駆動軸(440)の一端部にインペラ(421)が接続されたターボ圧縮機(410)において、駆動軸(440)のラジアル荷重が比較的に大きくなる位置にベアリングレスモータ(450)を配置し、駆動軸(440)のラジアル荷重が比較的に小さくなる位置にラジアル磁気軸受(460)を配置することができる。
ベアリングレスモータ(450)は、駆動軸(440)の軸方向において、ラジアル磁気軸受(460)において支持されるラジアル荷重よりも大きいラジアル荷重が作用する位置に配置されている。この例では、駆動軸(440)の一端部にインペラ(421)が接続されている。そして、ベアリングレスモータ(450)は、駆動軸(440)の軸方向においてラジアル磁気軸受(460)よりもインペラ(421)に近い位置に配置されている。なお、駆動軸(440)の軸方向における位置が駆動軸(440)の一端部(すなわちインペラ(421))に近くなるに連れて、その位置における駆動軸(440)のラジアル荷重が大きくなる傾向にある。したがって、駆動軸(440)の軸方向においてラジアル磁気軸受(460)よりもインペラ(421)に近い位置にベアリングレスモータ(450)を配置することにより、駆動軸(440)の一端部にインペラ(421)が接続されたターボ圧縮機(410)において、駆動軸(440)のラジアル荷重が比較的に大きくなる位置にベアリングレスモータ(450)を配置し、駆動軸(440)のラジアル荷重が比較的に小さくなる位置にラジアル磁気軸受(460)を配置することができる。
-実施形態4の効果-
以上のように、この実施形態によるターボ圧縮機(410)では、ベアリングレスモータ(450)と磁気軸受(460)とを用いて駆動軸(440)の回転駆動および非接触支持を行うことにより、ベアリングレスモータ(450)の代わりに駆動軸(440)の回転駆動のみを行うモータと駆動軸(440)の非接触支持のみを行う2つの磁気軸受とが設けられている場合よりも、ターボ圧縮機(410)を小型化することができる。
以上のように、この実施形態によるターボ圧縮機(410)では、ベアリングレスモータ(450)と磁気軸受(460)とを用いて駆動軸(440)の回転駆動および非接触支持を行うことにより、ベアリングレスモータ(450)の代わりに駆動軸(440)の回転駆動のみを行うモータと駆動軸(440)の非接触支持のみを行う2つの磁気軸受とが設けられている場合よりも、ターボ圧縮機(410)を小型化することができる。
また、この実施形態によるターボ圧縮機(410)では、駆動軸(440)のラジアル荷重が比較的に大きくなる位置にベアリングレスモータ(450)が配置され、駆動軸(440)のラジアル荷重が比較的に小さくなる位置に磁気軸受(460)が配置されている。すなわち、磁気軸受(460)は、ベアリングレスモータ(450)において支持されるラジアル荷重よりも小さいラジアル荷重が作用する位置に配置されている。なお、磁気軸受(460)において発生する電磁力は、磁気軸受(460)のサイズ(特に軸長やロータ径)に依存しており、磁気軸受(460)のサイズが大きくなるほど磁気軸受(460)において発生する電磁力が大きくなる傾向にある。そのため、ベアリングレスモータ(450)において支持されるラジアル荷重よりも小さいラジアル荷重が作用する位置に磁気軸受(460)を配置することにより、ベアリングレスモータ(450)において支持されるラジアル荷重よりも大きいラジアル荷重が作用する位置に磁気軸受(460)を配置する場合よりも、磁気軸受(460)のサイズ(特に軸長やロータ径)を小さくすることができる。これにより、ターボ圧縮機(410)をさらに小型化することができる。
また、冷媒回路(510)に設けられて冷媒を圧縮するターボ圧縮機(410)では、駆動軸(440)の負荷トルク(駆動軸(440)を回転駆動させるために必要となるトルク)が最大となる運転領域と駆動軸(440)のラジアル荷重が最大となる運転領域とが互いに異なり、駆動軸(440)のラジアル荷重が比較的に大きくなる運転領域(特に駆動軸(440)のラジアル荷重が最大となる運転領域)では、駆動軸(440)の負荷トルクが比較的に小さくなる。そのため、駆動軸(440)のラジアル荷重が比較的に大きくなる運転領域では、ベアリングレスモータ(450)の電磁力を支持力(駆動軸(440)を非接触で支持するための力)に十分に割り当てることができる。これにより、駆動軸(440)のラジアル負荷が比較的に大きくなる運転領域において駆動軸(440)の支持力を確保することができる。
〈ベアリングレスモータの変形例1〉
図26に示すように、ベアリングレスモータ(450)は、表面磁石型のベアリングレスモータによって構成されていてもよい。図26に示した表面磁石型のベアリングレスモータ(450)では、回転子(451)は、回転子コア(452)と、回転子コア(452)の外周面に設けられた複数(この例では8つ)の永久磁石(453)と、複数の永久磁石(453)の外周を囲う保護部材(458)とを有している。複数の永久磁石(453)は、回転子(451)の周方向において所定の角度ピッチで配置されている。この例では、8つの永久磁石(453)が回転子(451)の周方向において45°の角度ピッチで配置されている。また、永久磁石(453)は、回転子コア(452)の外周面に沿う形状(円弧状)に形成されている。なお、8つの永久磁石(453)は、互いに同形状となっている。そして、8つの永久磁石(453)は、それぞれの外周面および内周面が磁極面(S極面/N極面)となり回転子(451)の周方向に異なる磁極(S極/N極)が交互に並ぶように構成されている。保護部材(458)は、円筒状に形成され、複数の永久磁石(453)の外周に設けられている。
図26に示すように、ベアリングレスモータ(450)は、表面磁石型のベアリングレスモータによって構成されていてもよい。図26に示した表面磁石型のベアリングレスモータ(450)では、回転子(451)は、回転子コア(452)と、回転子コア(452)の外周面に設けられた複数(この例では8つ)の永久磁石(453)と、複数の永久磁石(453)の外周を囲う保護部材(458)とを有している。複数の永久磁石(453)は、回転子(451)の周方向において所定の角度ピッチで配置されている。この例では、8つの永久磁石(453)が回転子(451)の周方向において45°の角度ピッチで配置されている。また、永久磁石(453)は、回転子コア(452)の外周面に沿う形状(円弧状)に形成されている。なお、8つの永久磁石(453)は、互いに同形状となっている。そして、8つの永久磁石(453)は、それぞれの外周面および内周面が磁極面(S極面/N極面)となり回転子(451)の周方向に異なる磁極(S極/N極)が交互に並ぶように構成されている。保護部材(458)は、円筒状に形成され、複数の永久磁石(453)の外周に設けられている。
図27は、図26に示した表面磁石型のベアリングレスモータ(450)において発生する磁石磁束φ1と駆動用磁束BM1と支持用磁束BS1とを例示している。図21に示したコンセクエントポール型のベアリングレスモータ(450)と同様に、図26および図27に示した表面磁石型のベアリングレスモータ(450)は、これらの磁石磁束φ1と駆動用磁束BM1と支持用磁束BS1との相互作用によって、駆動トルク(T1)および支持力(F1)を同時に発生させるように構成されている。
〈ベアリングレスモータの変形例2〉
また、図28に示すように、ベアリングレスモータ(450)は、埋込磁石型のベアリングレスモータによって構成されていてもよい。図28に示した埋込磁石型のベアリングレスモータ(450)は、回転子(451)は、回転子コア(452)と、回転子コア(452)に埋設された複数(この例では8つ)の永久磁石(453)とを有している。複数の永久磁石(453)は、回転子(451)の周方向において所定の角度ピッチで配置されている。この例では、8つの永久磁石(453)が回転子(451)の周方向において45°の角度ピッチで配置されている。また、永久磁石(453)は、回転子コア(452)の外周面に沿う形状(円弧状)に形成されている。なお、8つの永久磁石(453)は、互いに同形状となっている。そして、8つの永久磁石(453)は、それぞれの外周面および内周面が磁極面(S極面/N極面)となり回転子(451)の周方向に異なる磁極(S極/N極)が交互に並ぶように構成されている。
また、図28に示すように、ベアリングレスモータ(450)は、埋込磁石型のベアリングレスモータによって構成されていてもよい。図28に示した埋込磁石型のベアリングレスモータ(450)は、回転子(451)は、回転子コア(452)と、回転子コア(452)に埋設された複数(この例では8つ)の永久磁石(453)とを有している。複数の永久磁石(453)は、回転子(451)の周方向において所定の角度ピッチで配置されている。この例では、8つの永久磁石(453)が回転子(451)の周方向において45°の角度ピッチで配置されている。また、永久磁石(453)は、回転子コア(452)の外周面に沿う形状(円弧状)に形成されている。なお、8つの永久磁石(453)は、互いに同形状となっている。そして、8つの永久磁石(453)は、それぞれの外周面および内周面が磁極面(S極面/N極面)となり回転子(451)の周方向に異なる磁極(S極/N極)が交互に並ぶように構成されている。
図29は、図28に示した埋込磁石型のベアリングレスモータ(450)において発生する磁石磁束φ1と駆動用磁束BM1と支持用磁束BS1とを例示している。図21に示したコンセクエントポール型のベアリングレスモータ(450)と同様に、図28および図29に示した埋込磁石型のベアリングレスモータ(450)は、これらの磁石磁束φ1と駆動用磁束BM1と支持用磁束BS1との相互作用によって、駆動トルク(T1)および支持力(F1)を同時に発生させるように構成されている。
〈各種ベアリングレスモータの比較〉
なお、ベアリングレスモータ(450)は、コンセクエントポール型のベアリングレスモータまたは埋込磁石型のベアリングレスモータによって構成されていることが好ましい。
なお、ベアリングレスモータ(450)は、コンセクエントポール型のベアリングレスモータまたは埋込磁石型のベアリングレスモータによって構成されていることが好ましい。
コンセクエントポール型のベアリングレスモータ(450)と表面磁石型のベアリングレスモータ(450)とを比較すると、図26および図27に示した表面磁石型のベアリングレスモータ(450)では、支持用磁束BS1の磁路が永久磁石(453)を通過する経路となっているが、図21~図24に示したコンセクエントポール型のベアリングレスモータ(450)では、支持用磁束BS1の磁路が永久磁石(453)を通過しない経路となっている。なお、永久磁石(453)における磁気抵抗は、回転子コア(452)の磁気抵抗よりも高くなっている。そのため、コンセクエントポール型のベアリングレスモータ(450)は、表面磁石型のベアリングレスモータ(450)よりも、支持用磁束BS1の磁路における磁気抵抗が低くなっている。したがって、コンセクエントポール型のベアリングレスモータ(450)は、表面磁石型のベアリングレスモータ(450)よりも大きな支持力(駆動軸(440)を非接触で支持するための力)を発生させることができる。
埋込磁石型のベアリングレスモータ(450)と表面磁石型のベアリングレスモータ(450)とを比較すると、図26および図27に示した表面磁石型のベアリングレスモータ(450)には、保護部材(458)が設けられているが、図28および図29に示した埋込磁石型のベアリングレスモータ(450)には、保護部材(458)が設けられていない。そのため、埋込磁石型のベアリングレスモータ(450)は、表面磁石型のベアリングレスモータ(450)よりも、支持用磁束BS1の磁路における磁気抵抗が低くなっている。したがって、埋込磁石型のベアリングレスモータ(450)は、表面磁石型のベアリングレスモータ(450)よりも大きな支持力(駆動軸(440)を非接触で支持するための力)を発生させることができる。
以上のように、ベアリングレスモータ(450)をコンセクエントポール型のベアリングレスモータまたは埋込磁石型のベアリングレスモータによって構成することにより、表面磁石型のベアリングレスモータによってベアリングレスモータ(450)を構成する場合よりも、ベアリングレスモータ(450)における支持力(駆動軸(440)を非接触で支持するための力)を大きくすることができる。
《発明の実施形態5》
本発明の実施形態5について説明する。本実施形態では、磁気軸受を備えたターボ圧縮機について説明する。図30に、本発明の実施形態5に係るターボ圧縮機(601)の構成例を示す。このターボ圧縮機(601)は、冷媒が循環して冷凍サイクル運転動作を行う冷媒回路(図示省略)に接続され、冷媒(流体)を圧縮する。図30に示すように、ターボ圧縮機(601)は、ケーシング(602)、圧縮機構(603)、及び電動機システム(610)を備えている。
本発明の実施形態5について説明する。本実施形態では、磁気軸受を備えたターボ圧縮機について説明する。図30に、本発明の実施形態5に係るターボ圧縮機(601)の構成例を示す。このターボ圧縮機(601)は、冷媒が循環して冷凍サイクル運転動作を行う冷媒回路(図示省略)に接続され、冷媒(流体)を圧縮する。図30に示すように、ターボ圧縮機(601)は、ケーシング(602)、圧縮機構(603)、及び電動機システム(610)を備えている。
〈ケーシング〉
ケーシング(602)は、両端が閉塞された円筒状に形成され、円筒軸線が水平向きとなるように配置されている。ケーシング(602)内の空間は、壁部(602a)によって区画され、壁部(602a)よりも右側の空間がインペラ(603a)(後述)を収容するインペラ室(S601)を構成し、壁部(602a)よりも左側の空間が、ベアリングレスモータ(640)(後述)を収容する電動機室(S602)を構成している。そして、ケーシング(602)内を軸方向に延びる駆動軸(605)が圧縮機構(603)とベアリングレスモータ(640)とを連結している。
ケーシング(602)は、両端が閉塞された円筒状に形成され、円筒軸線が水平向きとなるように配置されている。ケーシング(602)内の空間は、壁部(602a)によって区画され、壁部(602a)よりも右側の空間がインペラ(603a)(後述)を収容するインペラ室(S601)を構成し、壁部(602a)よりも左側の空間が、ベアリングレスモータ(640)(後述)を収容する電動機室(S602)を構成している。そして、ケーシング(602)内を軸方向に延びる駆動軸(605)が圧縮機構(603)とベアリングレスモータ(640)とを連結している。
〈圧縮機構〉
圧縮機構(603)は、インペラ室(S601)とインペラ(603a)とで構成され、圧縮機構(603)は、流体(この例では冷媒)を圧縮する。インペラ(603a)は、複数の羽根によって外形が略円錐形状となるように形成され、駆動軸(605)の一端に固定されている。圧縮機構(603)は、本発明の負荷の一例である。
圧縮機構(603)は、インペラ室(S601)とインペラ(603a)とで構成され、圧縮機構(603)は、流体(この例では冷媒)を圧縮する。インペラ(603a)は、複数の羽根によって外形が略円錐形状となるように形成され、駆動軸(605)の一端に固定されている。圧縮機構(603)は、本発明の負荷の一例である。
〈電動機システム〉
電動機システム(610)は、タッチダウン軸受(606)、ベアリングレスモータ(640)、電源(635)、2つのラジアル磁気軸受(621)、スラスト磁気軸受(622)、複数(この例では、5つ)の変位センサ(631,632)、及び制御器(690)を備えている。
電動機システム(610)は、タッチダウン軸受(606)、ベアリングレスモータ(640)、電源(635)、2つのラジアル磁気軸受(621)、スラスト磁気軸受(622)、複数(この例では、5つ)の変位センサ(631,632)、及び制御器(690)を備えている。
-ベアリングレスモータ-
ベアリングレスモータ(640)は、電動機室(S602)に配置されている。ベアリングレスモータ(640)は、電磁力によって駆動軸(605)を回転駆動しかつ駆動軸(605)のラジアル荷重を非接触で支持するように構成されている。ベアリングレスモータ(640)は、一対の回転子(641)と固定子(644)を有する。回転子(641)は駆動軸(605)に固定され、固定子(644)はケーシング(602)の内周壁に固定されている。
ベアリングレスモータ(640)は、電動機室(S602)に配置されている。ベアリングレスモータ(640)は、電磁力によって駆動軸(605)を回転駆動しかつ駆動軸(605)のラジアル荷重を非接触で支持するように構成されている。ベアリングレスモータ(640)は、一対の回転子(641)と固定子(644)を有する。回転子(641)は駆動軸(605)に固定され、固定子(644)はケーシング(602)の内周壁に固定されている。
図31は、ベアリングレスモータ(640)の構成例を示す横断面図である。同図に示すように、ベアリングレスモータ(640)は、コンセクエントポール型のベアリングレスモータである。ベアリングレスモータ(640)の固定子(644)は、バックヨーク部(645)と、図示を省略する複数のティース部と、ティース部に巻回された駆動用コイル(646a~646c)および支持用コイル(647a~647c)とを有する。ベアリングレスモータ(640)の回転子(641)は、コア部(642)と、このコア部(642)に埋設された複数(この例では、4つ)の永久磁石(643)とを有する。
固定子(644)は、磁性材料(例えば、積層鋼板)で構成されている。固定子(644)のバックヨーク部(645)は、円筒状に形成されている。駆動用コイル(646a~646c)および支持用コイル(647a~647c)は、各ティース部に分布巻方式で巻回されている。なお、駆動用コイル(646a~646c)および支持用コイル(647a~647c)は、各ティース部に集中巻方式で巻回されていてもよい。
駆動用コイル(646a~646c)は、ティース部のうち内周側に巻回されたコイルである。駆動用コイル(646a~646c)は、図31において太線で囲んで示すU相駆動用コイル(646a)と、太破線で囲んで示すV相駆動用コイル(646b)と、細線で囲んで示すW相駆動用コイル(646c)とから構成されている。
支持用コイル(647a~647c)は、ティース部のうち外周側に巻回されたコイルである。支持用コイル(647a~647c)は、図31において太線で囲んで示すU相支持用コイル(647a)と、太破線で囲んで示すV相支持用コイル(647b)と、細線で囲んで示すW相支持用コイル(647c)とから構成されている。
回転子(641)のコア部(642)は、円筒状に形成されている。コア部(642)の中央部には駆動軸(605)を挿通するためのシャフト孔(図示せず)が形成されている。コア部(642)は、磁性材料(例えば、積層鋼板)で構成されている。コア部(642)の外周面近傍には、この外周面に沿った形状を有する4つの永久磁石(643)が、回転子(641)の周方向において90°の角度ピッチ(AP1)で埋設されている。これら4つの永久磁石(643)は、互いに同形状である。各永久磁石(643)の外周面側はN極となっており、各永久磁石(643)の間のコア部(642)の外周面は擬似的にS極となっている。なお、各永久磁石(643)の外周面側がS極となっていてもよい。
図32には、ベアリングレスモータ(640)において、各永久磁石(643)によって生じる磁石磁束φ1と、インペラ(603a)および駆動軸(605)を回転駆動するために生じる駆動用磁束BM1とが示されている。ベアリングレスモータ(640)は、これら磁石磁束φ1と駆動用磁束BM1との相互作用によって、同図に示す駆動トルクT1(すなわち、駆動軸(605)を図32の反時計回り方向に回転させるトルク)を発生させるように構成されている。なお、同図中には、駆動用コイル(646a~646c)に流れる電流と等価の電流IM1が示されている。
図33には、ベアリングレスモータ(640)において、各永久磁石(643)によって生じる磁石磁束φ1と、駆動軸(605)のラジアル荷重を非接触で支持するために生じる支持用磁束BS1とが示されている。ベアリングレスモータ(640)は、これら磁石磁束φ1と支持用磁束BS1との相互作用によって、同図に示す支持力F1(すなわち、駆動軸(605)を図33で右方向に押す力)を発生させるように構成されている。なお、同図中には、支持用コイル(647a~647c)に流れる電流と等価の電流IS1が示されている。
図33からわかるように、支持用磁束BS1の磁路は、固定子(644)のバックヨーク部(645)およびティース部と、エアギャップと、回転子(641)のコア部(642)とを通る経路である。バックヨーク部(645)、ティース部およびコア部(642)の磁気抵抗は、永久磁石(643)の磁気抵抗よりも小さい。
図34には、ベアリングレスモータ(640)において、各永久磁石(643)によって生じる磁石磁束φ1と、インペラ(603a)および駆動軸(605)を回転駆動するために生じる駆動用磁束BM1と、駆動軸(605)のラジアル荷重を非接触で支持するために生じる支持用磁束BS1とが示されている。ベアリングレスモータ(640)は、これら磁石磁束φ1と駆動用磁束BM1と支持用磁束BS1との相互作用によって、同図に示す駆動トルクT1および支持力F1を同時に発生させるように構成されている。なお、同図中には、駆動用コイル(646a~646c)および支持用コイル(647a~647c)に流れる電流と等価の電流IM1,IS1が示されている。
-ラジアル磁気軸受-
電動機システム(610)は、2つのラジアル磁気軸受(621)を有し、これらのラジアル磁気軸受(621)は、ベアリングレスモータ(640)の軸方向両側にそれぞれ配置されている。それぞれのラジアル磁気軸受(621)は、被支持体(具体的には駆動軸(605))を挟んで互いに対向する電磁石(671~678)を有し、電磁石(671~678)の電磁力を合成力(合成電磁力(F))により、ラジアル方向の力を被支持体に作用させるように構成されている。ラジアル磁気軸受(621)では、これらの電磁石(671~678)に流れる電流を制御することにより、その電磁石(671~678)の合成電磁力(F)を制御して、電磁石(671~678)の対向方向における被支持体の位置を制御することができる。なお、以下の説明において、2つのラジアル磁気軸受(621)を区別する必要がある場合には、参照符合に枝番を付けて識別する場合がある(具体的には、621-1、621-2)。
電動機システム(610)は、2つのラジアル磁気軸受(621)を有し、これらのラジアル磁気軸受(621)は、ベアリングレスモータ(640)の軸方向両側にそれぞれ配置されている。それぞれのラジアル磁気軸受(621)は、被支持体(具体的には駆動軸(605))を挟んで互いに対向する電磁石(671~678)を有し、電磁石(671~678)の電磁力を合成力(合成電磁力(F))により、ラジアル方向の力を被支持体に作用させるように構成されている。ラジアル磁気軸受(621)では、これらの電磁石(671~678)に流れる電流を制御することにより、その電磁石(671~678)の合成電磁力(F)を制御して、電磁石(671~678)の対向方向における被支持体の位置を制御することができる。なお、以下の説明において、2つのラジアル磁気軸受(621)を区別する必要がある場合には、参照符合に枝番を付けて識別する場合がある(具体的には、621-1、621-2)。
図35は、ラジアル磁気軸受(621)の構成例を示す横断面図である。また、図36は、ラジアル磁気軸受(621)の構成例を示す縦断面図である。このラジアル磁気軸受(621)は、ヘテロポーラ型のラジアル磁気軸受であり、磁気軸受コア(661)と、8つのコイル(665)とを備えている。磁気軸受コア(661)は、例えば、複数の電磁鋼板が積層されて構成され、バックヨーク(662)と8つのティース(663)とを有している。バックヨーク(662)は、円筒状に形成されている。8つのティース(663)は、バックヨーク(662)の内周面に沿うように所定間隔(この例では、45°間隔)で周方向に配列され、それぞれがバックヨーク(662)の内周面から径方向内方へ向けて突出し、それぞれの内周面(突端面)が駆動軸(605)の被支持部の外周面と所定のギャップを隔てて対向する。
8つのコイル(665)は、磁気軸受コア(661)の8つのティース(663)にそれぞれ巻回されている。これにより、ラジアル磁気軸受(621)には、8つの電磁石(第1~第8電磁石(671~678))が構成されている。具体的にラジアル磁気軸受(621)では、第1電磁石(671)、第2電磁石(672)、第7電磁石(677)、第8電磁石(678)、第3電磁石(673)、第4電磁石(674)、第5電磁石(675)、及び第6電磁石(676)が、この順に、図35における時計回り方向に順に配列されている。なお、各電磁石(671~678)におけるコイル(665)の巻回方向、及び各コイル(665)に流れる電流の向きは、図35に示した矢印の方向に磁束が発生するように設定されている。
それぞれのラジアル磁気軸受(621)では、図35および図36に示すように、第1電磁石(671)と第2電磁石(672)とが直列に結線されて第1電磁石対(651)が構成され、第3電磁石(673)と第4電磁石(674)とが直列に結線されて第2電磁石対(652)が構成されている。また、第5電磁石(675)と第6電磁石(676)とが直列に結線されて第3電磁石対(653)が構成され、第7電磁石(677)と第8電磁石(678)とが直列に結線されて第4電磁石対(654)が構成されている。
第1および第2電磁石対(651,652)は、図35に示すように、駆動軸(605)の被支持部を挟んで互いに対向し、第1および第2電磁石対(651,652)の合成電磁力(F)により駆動軸(605)の被支持部を非接触に支持する。同様に、第3および第4電磁石対(653,654)も、駆動軸(605)の被支持部を挟んで互いに対向し、第3および第4電磁石対(653,654)の合成電磁力(F)により駆動軸(605)の被支持部を非接触に支持する。なお、第3および第4電磁石対(653,654)の対向方向(図35では、左右方向)は、平面視において第1および第2電磁石対(651,652)の対向方向(図35では、上下方向)と直交している。
電動機システム(610)では、2つのラジアル磁気軸受(621)は、電磁石対(651~654)同士が互いに結線されている。図37に、2つのラジアル磁気軸受(621)間の結線の状態を示す。電動機システム(610)では、図37に示すように、一方のラジアル磁気軸受(621-1)における第1電磁石対(651)と、もう一方のラジアル磁気軸受(621-2)における第2電磁石対(652)とが直列に結線されている。また、一方のラジアル磁気軸受(621-1)における第2電磁石対(652)と、もう一方のラジアル磁気軸受(621-2)における第1電磁石対(651)とが直列に結線されている。
なお、図37では図示を省略しているが、電動機システム(610)では、一方のラジアル磁気軸受(621-1)における第3電磁石対(653)と、もう一方のラジアル磁気軸受(621-2)における第4電磁石対(654)とが直列に結線されている。更に、一方のラジアル磁気軸受(621-1)における第3電磁石対(653)と、もう一方のラジアル磁気軸受(621-2)における第4電磁石対(654)とが直列に結線されている。すなわち、電動機システム(610)では、直列接続された電磁石対(651~654)が4組存在することになる。直列接続された4組の電磁石対(651~654)には、電源(635)の別個の出力系統(後述)から直流が供給される。なお、図37では、電源(635)の出力を2系統のみを図示してある。
-スラスト磁気軸受-
電動機システム(610)には、1つのスラスト磁気軸受(622)が設けられている。スラスト磁気軸受(622)は、被支持体(具体的には後述の円盤部(605a))を挟んで互いに対向する電磁石対を有し、電磁石対の合成電磁力(F)により被支持体を非接触に支持するように構成されている。
電動機システム(610)には、1つのスラスト磁気軸受(622)が設けられている。スラスト磁気軸受(622)は、被支持体(具体的には後述の円盤部(605a))を挟んで互いに対向する電磁石対を有し、電磁石対の合成電磁力(F)により被支持体を非接触に支持するように構成されている。
具体的には、図30に示すように、スラスト磁気軸受(622)は、第1および第2電磁石(681,682)を有している。また、駆動軸(605)には、その他端部(インペラ(603a)が固定された一端部とは反対側の端部)に円盤状の部分(以下、円盤部(605a))がある。第1および第2電磁石(681,682)は、駆動軸(605)の被支持部である円盤部(605a)を挟んで互いに対向し、第1および第2電磁石(681,682)の合成電磁力により駆動軸(605)の被支持部(円盤部(605a))を非接触に支持する。すなわち、第1および第2電磁石(681,682)に流れる電流を制御することによって、第1および第2電磁石(681,682)の対向方向(すなわち軸方向(以下、スラスト方向とも呼ぶ)であり、図30では、左右方向)における駆動軸(605)の被支持部(円盤部(605a))の位置を制御することができる。
-電源(635)-
電源(635)は、各磁気軸受(621,622)が備える電磁石(671~678,681,682)に直流を供給するものである。この例では、電源(635)は、ラジアル磁気軸受(621)用に、4系統の出力を備えている。すなわち、電源(635)は、直列接続された4組の電磁石対(651~654)のそれぞれの組に別個に直流を供給する。また、電源(635)は、スラスト磁気軸受(622)用に2系統の出力を備えている。具体的には、電源(635)は、第1電磁石(681)用の出力系統と、第2電磁石(682)用の出力系統を備えている。この電源(635)では、各出力系統の電圧を別個に制御可能に構成されている。電源(635)に限定はなく、種々の構成の電源装置を採用できる。
電源(635)は、各磁気軸受(621,622)が備える電磁石(671~678,681,682)に直流を供給するものである。この例では、電源(635)は、ラジアル磁気軸受(621)用に、4系統の出力を備えている。すなわち、電源(635)は、直列接続された4組の電磁石対(651~654)のそれぞれの組に別個に直流を供給する。また、電源(635)は、スラスト磁気軸受(622)用に2系統の出力を備えている。具体的には、電源(635)は、第1電磁石(681)用の出力系統と、第2電磁石(682)用の出力系統を備えている。この電源(635)では、各出力系統の電圧を別個に制御可能に構成されている。電源(635)に限定はなく、種々の構成の電源装置を採用できる。
-タッチダウン軸受-
タッチダウン軸受(606)は、電動機システム(610)が非通電であるとき(すなわち、駆動軸(605)が浮上していないとき)に駆動軸(605)を、ラジアル方向及びスラスト方向のそれぞれの方向について支持するように構成されている。
タッチダウン軸受(606)は、電動機システム(610)が非通電であるとき(すなわち、駆動軸(605)が浮上していないとき)に駆動軸(605)を、ラジアル方向及びスラスト方向のそれぞれの方向について支持するように構成されている。
-変位センサ-
図30に示すように、このターボ圧縮機(601)には、ラジアル変位センサ(631)とスラスト変位センサ(632)の2種類の変位センサが設けられている。この例では、ラジアル変位センサ(631)及びスラスト変位センサ(632)は、何れも渦電流式の変位センサである。これらの変位センサ(631,632)は、被支持体(この例では、駆動軸(605))を挟んで互いに対向する2つの電磁石対(例えば、第1および第2電磁石対(651,652)の組)に対応(隣接)して設けられ、変位センサ(631,632)の取付位置において、該変位センサ(631,632)に対する駆動軸(605)のギャップ(g)を検出するように構成されている。
図30に示すように、このターボ圧縮機(601)には、ラジアル変位センサ(631)とスラスト変位センサ(632)の2種類の変位センサが設けられている。この例では、ラジアル変位センサ(631)及びスラスト変位センサ(632)は、何れも渦電流式の変位センサである。これらの変位センサ(631,632)は、被支持体(この例では、駆動軸(605))を挟んで互いに対向する2つの電磁石対(例えば、第1および第2電磁石対(651,652)の組)に対応(隣接)して設けられ、変位センサ(631,632)の取付位置において、該変位センサ(631,632)に対する駆動軸(605)のギャップ(g)を検出するように構成されている。
電動機システム(610)では、ラジアル変位センサ(631)は、各ラジアル磁気軸受(621)に2つずつ設けられている。つまり、ターボ圧縮機(601)には、4つのラジアル変位センサ(631)がある。これらのラジアル変位センサ(631)は、該ラジアル変位センサ(631)に対する駆動軸(605)のギャップ(g)を検出するものである。各ラジアル磁気軸受(621)では、一方のラジアル変位センサ(631)が第1電磁石対(651)と第2電磁石対(652)の対向方向(以下、Y方向)のギャップ(g)を検出する。Y方向はラジアル磁気軸受(621)の径方向であって、図35では、上下方向である。また、もう一方のラジアル変位センサ(631)は、第3電磁石対(653)と第4電磁石対(654)の対向方向(すなわち、Y方向と直交する径方向(以下、X方向と呼ぶ)であり、図35では、左右方向)におけるギャップ(g)を検出する。
スラスト変位センサ(632)は、ターボ圧縮機(601)に1つのみ設けられている。このスラスト変位センサ(632)は、スラスト磁気軸受(622)における第1電磁石(681)と第2電磁石(682)の対向方向(すなわち、駆動軸(605)における軸方向であり、図30では、左右方向)のギャップ(g)を検出するものである。なお、以下では、駆動軸(605)における軸方向をZ方向とも呼ぶ場合がある。
-制御器-
制御器(690)は、被支持体(この例では、駆動軸(605)の被支持部)が非接触に支持されるように、ベアリングレスモータ(640)、及び各磁気軸受(621,622)を制御する。具体的は、制御器(690)は、ベアリングレスモータ(640)及び磁気軸受(621,622)の電磁力を制御することによって、駆動軸(605)の浮上制御を行う。なお、制御器(690)は、具体的には、マイクロコンピュータと、それを動作させるためのソフトウエアを格納したメモリディバイスなどを用いて構成することができる。
制御器(690)は、被支持体(この例では、駆動軸(605)の被支持部)が非接触に支持されるように、ベアリングレスモータ(640)、及び各磁気軸受(621,622)を制御する。具体的は、制御器(690)は、ベアリングレスモータ(640)及び磁気軸受(621,622)の電磁力を制御することによって、駆動軸(605)の浮上制御を行う。なお、制御器(690)は、具体的には、マイクロコンピュータと、それを動作させるためのソフトウエアを格納したメモリディバイスなどを用いて構成することができる。
〈駆動軸の位置制御〉
本実施形態では、ベアリングレスモータ(640)が、主に駆動軸(605)のラジアル方向(X方向及びY方向、以下では並進方向と呼ぶ場合もある)における変位の制御(以下、ラジアル方向制御と呼ぶ)を分担し、2つのラジアル磁気軸受(621)は、主に駆動軸(605)のチルト方向における変位(X軸回り又はY軸回りの回転方向の変位)の制御(以下、チルト方向制御と呼ぶ)を分担する。なお、ここでは、X軸は、前記X方向に沿い、且つ、ベアリングレスモータ(640)を含む回転系全体の重心を通る軸であり、Y軸は、前記Y方向に沿い、且つ前記重心を通る軸である。チルト方向に変位する際の回転中心は、ベアリングレスモータ(640)を含む回転系全体の重心であると考えて差し支えない。
本実施形態では、ベアリングレスモータ(640)が、主に駆動軸(605)のラジアル方向(X方向及びY方向、以下では並進方向と呼ぶ場合もある)における変位の制御(以下、ラジアル方向制御と呼ぶ)を分担し、2つのラジアル磁気軸受(621)は、主に駆動軸(605)のチルト方向における変位(X軸回り又はY軸回りの回転方向の変位)の制御(以下、チルト方向制御と呼ぶ)を分担する。なお、ここでは、X軸は、前記X方向に沿い、且つ、ベアリングレスモータ(640)を含む回転系全体の重心を通る軸であり、Y軸は、前記Y方向に沿い、且つ前記重心を通る軸である。チルト方向に変位する際の回転中心は、ベアリングレスモータ(640)を含む回転系全体の重心であると考えて差し支えない。
本実施形態におけるラジアル方向制御では、制御器(690)は、X方向のギャップ(g)及びY方向のギャップ(g)をラジアル変位センサ(631)から読み取る。例えば、制御器(690)は、一方のラジアル磁気軸受(621)に対応するX方向用のラジアル変位センサ(631)の検出値と、もう一方のラジアル磁気軸受(621)に対応するX方向用のラジアル変位センサ(631)の検出値とから、ベアリングレスモータ(640)の回転子(641)位置における、駆動軸(605)のラジアル方向の変位(ここではX方向の変位)を算出する。同様に、制御器(690)は、駆動軸(605)のY方向の変位も算出する。
そして、制御器(690)は、フィードバック制御(例えば、いわゆるPID制御)などのアルゴリズムを用いて、求めたX方向の変位に応じて、ベアリングレスモータ(640)において、X方向の電磁力(詳しくは支持用磁束BS1)の制御を行うことによって、駆動軸(605)のX方向(ラジアル方向)の位置を目標位置に制御する。目標位置は、例えばベアリングレスモータ(640)の固定子(644)におけるX方向の中心である。制御器(690)は、Y方向(ラジアル方向)についても、同様に、ベアリングレスモータ(640)において、Y方向の電磁力の制御を行って、駆動軸(605)のY方向(ラジアル方向)の位置を目標位置に制御する。
また、制御器(690)は、駆動軸(605)のチルト方向の変位制御も行う。チルト方向制御に際して、制御器(690)は、チルト方向の変位を求める。ここで、チルト方向の変位とは、回転中心回りの変位角度であり、以下ではチルト変位角とも呼ぶ。以下に示す式(1)は、制御器(690)が、X軸回りのチルト変位角(θx)を求める際に使用する式である。
θx=(g1-g2)/L ・・・・式(1)
式(1)において、g1は、一方のラジアル磁気軸受(621)に対応する、Y方向用のラジアル変位センサ(631)の検出値である。また、g2は、もう一方のラジアル磁気軸受(621)に対応する、Y方向用のラジアル変位センサ(631)の検出値である。また。Lは、Y方向用の2つのラジアル変位センサ(631)の間のZ方向の距離(全長Lと呼ぶ)である。
式(1)において、g1は、一方のラジアル磁気軸受(621)に対応する、Y方向用のラジアル変位センサ(631)の検出値である。また、g2は、もう一方のラジアル磁気軸受(621)に対応する、Y方向用のラジアル変位センサ(631)の検出値である。また。Lは、Y方向用の2つのラジアル変位センサ(631)の間のZ方向の距離(全長Lと呼ぶ)である。
図38に、チルト変位角(θx)、各センサで検出されたギャップ(g1,g2)、及び全長Lの関係を示す。図38から分かるように、g1及びg2がLと比べて非常に小さい場合には、tan(θx)=θxと近似できるので、式(1)が成立するのである。同様に、制御器(690)は、Y軸回りのチルト変位角(θy)も算出する。Y軸回りのチルト変位角(θy)は、一方のラジアル磁気軸受(621)に対応するX方向用のラジアル変位センサ(631)の検出値と、もう一方のラジアル磁気軸受(621)に対応するX方向用のラジアル変位センサ(631)の検出値、X方向用の2つのラジアル変位センサ(631)の間のZ方向の距離(すなわち、全長L)を用いて求めることができる。チルト変位角(θy)の算出も式(1)と同様の近似式で行うことができる。
制御器(690)は、チルト変位角(θx)が求まると、チルト変位角(θx)の目標値(例えばゼロ度)と、求めたチルト変位角(θx)との偏差に応じて、フィードバック制御(例えば、いわゆるPID制御)などのアルゴリズムを用いて、それぞれのラジアル磁気軸受(621)の第1および第2電磁石対(651,652)、より詳しくは、第1から第4電磁石(671,672,673,674)を制御する。この電動機システム(610)では、図37に示すように、一方のラジアル磁気軸受(621)における第1電磁石対(651)と、もう一方のラジアル磁気軸受(621)における第2電磁石対(652)とが直列に結線されている。そのため、フィードバック制御の過程において、2つのラジアル磁気軸受(621)は、Y方向に関して互いに逆位相の合成電磁力(F)を発生させることになる。すなわち、一方のラジアル磁気軸受(621)における駆動軸(605)のY方向の変位と、もう一方のラジアル磁気軸受(621)における駆動軸(605)のY方向の変位とは互いに逆となり、駆動軸(605)はチルト方向(X軸回り)に変位(回転)する。
同様に、制御器(690)は、チルト変位角(θy)の目標値(例えばゼロ度)と、求めたチルト変位角(θy)との偏差に応じて、例えばフィードバック制御のアルゴリズムを用いて、第3および第4電磁石対(653,654)、すなわち、第5から第8電磁石(675,676,677,678)を制御する。この電動機システム(610)では、もう一方のラジアル磁気軸受(621)における第3電磁石対(653)と、一方のラジアル磁気軸受(621)における第4電磁石対(654)とが直列に結線されているので、フィードバック制御の過程において、2つのラジアル磁気軸受(621)は、X方向に関して互いに逆位相の合成電磁力(F)を発生させることになる。そのため、一方のラジアル磁気軸受(621)における駆動軸(605)のX方向の変位と、もう一方のラジアル磁気軸受(621)における駆動軸(605)のX方向の変位とは互いに逆となり、駆動軸(605)はチルト方向(Y軸回り)に変位(回転)する。
なお、電動機システム(610)では、制御器(690)によってスラスト磁気軸受(622)が制御されて、スラスト方向の変位制御も行われるが、ここでは説明を省略する。
-実施形態5の効果-
以上のように、本実施形態では、ベアリングレスモータ(640)において、ラジアル方向の変位制御を分担するようにした。そのため、ラジアル磁気軸受(621)において負担するラジアル方向の加重が低減する。それにより、本実施形態では、ラジアル磁気軸受のみで駆動軸を支持する装置と比べ、ラジアル磁気軸受(621)を小型化することが可能になる。ラジアル磁気軸受(621)を小型化できると、電動機システム(610)を大型化することなく、ベアリングレスモータ(640)を含む回転系全体の重心から、各ラジアル磁気軸受(621)までの距離を伸ばすことが可能になる。このように、重心からラジアル磁気軸受(621)までの距離(すなわち力の作用点から重心までの距離)を大きくできると、チルト変位制御において優位である。すなわち、本実施形態では、電動機システム(610)の大型化を抑制しつつ、駆動軸(605)のチルト方向の変位を低減することが可能になる。
以上のように、本実施形態では、ベアリングレスモータ(640)において、ラジアル方向の変位制御を分担するようにした。そのため、ラジアル磁気軸受(621)において負担するラジアル方向の加重が低減する。それにより、本実施形態では、ラジアル磁気軸受のみで駆動軸を支持する装置と比べ、ラジアル磁気軸受(621)を小型化することが可能になる。ラジアル磁気軸受(621)を小型化できると、電動機システム(610)を大型化することなく、ベアリングレスモータ(640)を含む回転系全体の重心から、各ラジアル磁気軸受(621)までの距離を伸ばすことが可能になる。このように、重心からラジアル磁気軸受(621)までの距離(すなわち力の作用点から重心までの距離)を大きくできると、チルト変位制御において優位である。すなわち、本実施形態では、電動機システム(610)の大型化を抑制しつつ、駆動軸(605)のチルト方向の変位を低減することが可能になる。
なお、負荷(圧縮機構(603))から各磁気軸受(621)までの各距離が互いに異なる場合には、前記負荷により近い方のラジアル磁気軸受(621)が、もう一方のラジアル磁気軸受(621)よりも大きな合成電磁力(F)を発生するように、各電磁石(671~678)を構成するのが望ましい。こうすることで、チルト変位角を低減させるための力をバランスよく発生させることが可能になる。
-実施形態5の様々な変形例-
本実施形態では、合成電磁力(F)の大きさを両磁気軸受(621)で互いに異ならせるには、例えば、コイル(665)の巻数、各コイル(665)に流す電流の大きさ、磁気回路の磁気抵抗の大きさ、電磁石のサイズの少なくとも1つを変更して各電磁石(671~678)の起磁力を調整することで実現できる。例えば、前記負荷(603)により近い方のラジアル磁気軸受(621)が有する電磁石(671~678)のコイル(665)の巻数の方を、もう一方のラジアル磁気軸受(621)が有する電磁石(671~678)のコイル(665)の巻数よりも多くすることが考えられる。また、磁気回路の磁気抵抗の大きさを変えるには、磁路の幅を変えることが考えられる。
本実施形態では、合成電磁力(F)の大きさを両磁気軸受(621)で互いに異ならせるには、例えば、コイル(665)の巻数、各コイル(665)に流す電流の大きさ、磁気回路の磁気抵抗の大きさ、電磁石のサイズの少なくとも1つを変更して各電磁石(671~678)の起磁力を調整することで実現できる。例えば、前記負荷(603)により近い方のラジアル磁気軸受(621)が有する電磁石(671~678)のコイル(665)の巻数の方を、もう一方のラジアル磁気軸受(621)が有する電磁石(671~678)のコイル(665)の巻数よりも多くすることが考えられる。また、磁気回路の磁気抵抗の大きさを変えるには、磁路の幅を変えることが考えられる。
また、本実施形態では、負荷(603)により近い方の磁気軸受(621)の方の軸方向長さを、もう一方の磁気軸受(621)の軸方向長さよりも長くすることでも、負荷(603)により近い方の磁気軸受(621)の合成電磁力(F)の方をより大きくできる。
また、本実施形態では、駆動軸(605)において、負荷(603)により近い方の磁気軸受(621)に面する部分の方の直径を、もう一方の磁気軸受(621)に面する部分の直径よりも大きくすることでも、負荷(603)により近い方の磁気軸受(621)の合成電磁力(F)の方をより大きくできる。
また、本実施形態では、ラジアル磁気軸受(621)においてラジアル方向の支持力も発生させてもよい。
また、本実施形態では、電動機システム(610)を、圧縮機構(603)以外の負荷の駆動に用いてもよい。
また、本実施形態では、ベアリングレスモータ(640)用の制御器と、磁気軸受(621)用の制御器とは、それぞれ別個に設けてもよい。
《発明の実施形態6》
本発明の実施形態6について説明する。本実施形態のターボ圧縮機(701)は、冷凍サイクルを行う冷媒回路(図示せず)に設けられて冷媒を圧縮するものである。図39に示すように、ターボ圧縮機(701)は、ケーシング(710)と、インペラ(720)と、駆動軸(730)と、タッチダウン軸受(740,741)と、スラスト磁気軸受(750)と、制御部(790)と、電源部(791)と、第1ベアリングレスモータ(760)と、第2ベアリングレスモータ(770)と、第1動圧気体軸受(780)と、第2動圧気体軸受(782)とを備えている。第1ベアリングレスモータ(760)と第2ベアリングレスモータ(770)とは、駆動軸(730)の軸方向に並んで配置されている。第1および第2ベアリングレスモータ(760,770)と、第1および第2動圧気体軸受(780,782)とは、駆動支持部を構成している。
本発明の実施形態6について説明する。本実施形態のターボ圧縮機(701)は、冷凍サイクルを行う冷媒回路(図示せず)に設けられて冷媒を圧縮するものである。図39に示すように、ターボ圧縮機(701)は、ケーシング(710)と、インペラ(720)と、駆動軸(730)と、タッチダウン軸受(740,741)と、スラスト磁気軸受(750)と、制御部(790)と、電源部(791)と、第1ベアリングレスモータ(760)と、第2ベアリングレスモータ(770)と、第1動圧気体軸受(780)と、第2動圧気体軸受(782)とを備えている。第1ベアリングレスモータ(760)と第2ベアリングレスモータ(770)とは、駆動軸(730)の軸方向に並んで配置されている。第1および第2ベアリングレスモータ(760,770)と、第1および第2動圧気体軸受(780,782)とは、駆動支持部を構成している。
なお、本明細書の説明において、「軸方向」とは、回転軸方向のことであって、駆動軸(730)の軸心の方向のことであり、「径方向」とは、駆動軸(730)の軸方向と直交する方向のことである。また、「外周側」とは、駆動軸(730)の軸心からより遠い側のことであり、「内周側」とは、駆動軸(730)の軸心により近い側のことである。
-ケーシング-
ケーシング(710)は、両端が閉塞された円筒状に形成され、円筒軸線が水平向きとなるように配置されている。ケーシング(710)内の空間は、壁部(711)によって区画され、壁部(711)よりも右側の空間がインペラ(720)を収容するインペラ室(712)を構成し、壁部(711)よりも左側の空間が第1および第2ベアリングレスモータ(760,770)を収容する電動機室(714)を構成している。そして、ケーシング(710)内を軸方向に延びる駆動軸(730)がインペラ(720)と第1および第2ベアリングレスモータ(760,770)とを連結している。第1および第2ベアリングレスモータ(760,770)は、駆動支持部を構成している。
ケーシング(710)は、両端が閉塞された円筒状に形成され、円筒軸線が水平向きとなるように配置されている。ケーシング(710)内の空間は、壁部(711)によって区画され、壁部(711)よりも右側の空間がインペラ(720)を収容するインペラ室(712)を構成し、壁部(711)よりも左側の空間が第1および第2ベアリングレスモータ(760,770)を収容する電動機室(714)を構成している。そして、ケーシング(710)内を軸方向に延びる駆動軸(730)がインペラ(720)と第1および第2ベアリングレスモータ(760,770)とを連結している。第1および第2ベアリングレスモータ(760,770)は、駆動支持部を構成している。
-インペラ-
インペラ(720)は、複数の羽根によって外形が略円錐形状となるように形成されている。インペラ(720)は、駆動軸(730)の一端に固定された状態で、インペラ室(712)に収容されている。インペラ室(712)には、吸入管(715)および吐出管(716)が接続され、インペラ室(712)の外周部には、圧縮空間(713)が形成されている。吸入管(715)は、冷媒を外部からインペラ室(712)内に導くために設けられ、吐出管(716)は、インペラ室(712)内で圧縮された高圧の冷媒を外部へ戻すために設けられている。
インペラ(720)は、複数の羽根によって外形が略円錐形状となるように形成されている。インペラ(720)は、駆動軸(730)の一端に固定された状態で、インペラ室(712)に収容されている。インペラ室(712)には、吸入管(715)および吐出管(716)が接続され、インペラ室(712)の外周部には、圧縮空間(713)が形成されている。吸入管(715)は、冷媒を外部からインペラ室(712)内に導くために設けられ、吐出管(716)は、インペラ室(712)内で圧縮された高圧の冷媒を外部へ戻すために設けられている。
-タッチダウン軸受-
ターボ圧縮機(701)には2つのタッチダウン軸受(740,741)が設けられている。一方のタッチダウン軸受(740)は駆動軸(730)の一端部(図39の右側端部)近傍に設けられ、他方のタッチダウン軸受(741)は駆動軸(730)の他端部近傍に設けられている。これらのタッチダウン軸受(740,741)は、第1および第2ベアリングレスモータ(760,770)が非通電であるとき(すなわち、駆動軸(730)が浮上していないとき)に駆動軸(730)を支持するように構成されている。
ターボ圧縮機(701)には2つのタッチダウン軸受(740,741)が設けられている。一方のタッチダウン軸受(740)は駆動軸(730)の一端部(図39の右側端部)近傍に設けられ、他方のタッチダウン軸受(741)は駆動軸(730)の他端部近傍に設けられている。これらのタッチダウン軸受(740,741)は、第1および第2ベアリングレスモータ(760,770)が非通電であるとき(すなわち、駆動軸(730)が浮上していないとき)に駆動軸(730)を支持するように構成されている。
-スラスト磁気軸受-
図39に示すように、スラスト磁気軸受(750)は、第1および第2電磁石(751,752)を有していて、駆動軸(730)の他端部(すなわち、インペラ(720)が固定された一端部とは反対側の端部)に設けられた円盤状の部分(以下、円盤部(731))を電磁力によって非接触で支持するように構成されている。そして、スラスト磁気軸受(750)は、第1および第2電磁石(751,752)に流れる電流を制御することにより、第1および第2電磁石(751,752)の対向方向(すなわち、軸方向、図39では左右方向)における駆動軸(730)の被支持部(円盤部(731))の位置を制御することができる。
図39に示すように、スラスト磁気軸受(750)は、第1および第2電磁石(751,752)を有していて、駆動軸(730)の他端部(すなわち、インペラ(720)が固定された一端部とは反対側の端部)に設けられた円盤状の部分(以下、円盤部(731))を電磁力によって非接触で支持するように構成されている。そして、スラスト磁気軸受(750)は、第1および第2電磁石(751,752)に流れる電流を制御することにより、第1および第2電磁石(751,752)の対向方向(すなわち、軸方向、図39では左右方向)における駆動軸(730)の被支持部(円盤部(731))の位置を制御することができる。
-制御部-
制御部(790)は、駆動軸(730)の位置が所望の位置となるように、円盤部(731)とスラスト磁気軸受(750)との間のギャップを検出可能なギャップセンサ(図示せず)の検出値、第1および第2ベアリングレスモータ(760,770)における固定子(764,774)と回転子(761,771)との間のギャップを検出可能なギャップセンサ(図示せず)の検出値、およびインペラ(720)および駆動軸(730)の目標回転速度の情報に基づいて、スラスト磁気軸受(750)に供給する電圧を制御するための電圧指令値(スラスト電圧指令値)や、第1および第2ベアリングレスモータ(760,770)に供給する電圧を制御するための電圧指令値(モータ電圧指令値)を出力する。例えば、制御部(790)は、マイクロコンピュータ(図示せず)と、マイクロコンピュータを動作させるプログラムとによって構成することが可能である。
制御部(790)は、駆動軸(730)の位置が所望の位置となるように、円盤部(731)とスラスト磁気軸受(750)との間のギャップを検出可能なギャップセンサ(図示せず)の検出値、第1および第2ベアリングレスモータ(760,770)における固定子(764,774)と回転子(761,771)との間のギャップを検出可能なギャップセンサ(図示せず)の検出値、およびインペラ(720)および駆動軸(730)の目標回転速度の情報に基づいて、スラスト磁気軸受(750)に供給する電圧を制御するための電圧指令値(スラスト電圧指令値)や、第1および第2ベアリングレスモータ(760,770)に供給する電圧を制御するための電圧指令値(モータ電圧指令値)を出力する。例えば、制御部(790)は、マイクロコンピュータ(図示せず)と、マイクロコンピュータを動作させるプログラムとによって構成することが可能である。
-電源部-
電源部(791)は、制御部(790)からのスラスト電圧指令値およびモータ電圧指令値に基づいて、スラスト磁気軸受(750)ならびに第1および第2ベアリングレスモータ(760,770)に電圧をそれぞれ供給する。例えば、電源部(791)は、PWM(Pulse Width Modulation)アンプによって構成することが可能である。電源部(791)は、電気回路を構成している。
電源部(791)は、制御部(790)からのスラスト電圧指令値およびモータ電圧指令値に基づいて、スラスト磁気軸受(750)ならびに第1および第2ベアリングレスモータ(760,770)に電圧をそれぞれ供給する。例えば、電源部(791)は、PWM(Pulse Width Modulation)アンプによって構成することが可能である。電源部(791)は、電気回路を構成している。
-第1ベアリングレスモータ-
第1ベアリングレスモータ(760)は、電動機室(714)のうちインペラ(720)に近い側に配置されている。第1ベアリングレスモータ(760)は、電磁力によって駆動軸(730)を回転駆動しかつ駆動軸(730)のラジアル荷重を非接触で支持するように構成されている。第1ベアリングレスモータ(760)は、一対の回転子(761)と固定子(764)を有する。回転子(761)は駆動軸(730)に固定され、固定子(764)はケーシング(710)の内周壁に固定されている。
第1ベアリングレスモータ(760)は、電動機室(714)のうちインペラ(720)に近い側に配置されている。第1ベアリングレスモータ(760)は、電磁力によって駆動軸(730)を回転駆動しかつ駆動軸(730)のラジアル荷重を非接触で支持するように構成されている。第1ベアリングレスモータ(760)は、一対の回転子(761)と固定子(764)を有する。回転子(761)は駆動軸(730)に固定され、固定子(764)はケーシング(710)の内周壁に固定されている。
回転子(761)は、複数の永久磁石(図示せず)が埋設されて円筒状に形成されている。回転子(761)の直径は、駆動軸(730)の直径と実質的に等しい。回転子(761)は、駆動軸(730)に形成された第1小径部(732)(すなわち、駆動軸(730)において周囲よりも直径が小さい部分)に固定されている。なお、回転子(761)の直径は、駆動軸(730)の直径と異なっていてもよい。
固定子(762)は、回転子(761)の外周側に配置されて円筒状に形成されている。固定子(762)には、所定の電流範囲内の電流が流れるコイル(763)が巻回されている。なお、コイル(763)は、分布巻方式で巻回されていてもよく、集中巻方式で巻回されていてもよい。
固定子(762)のコイルエンド部(764)(すなわち、固定子(762)のコア部よりもコイル(763)が軸方向に突出した部分)は、第1モールド樹脂(765)でモールドされている。この第1モールド樹脂(765)のうち固定子(762)の中心部と反対側の内周面には、固定子(762)の中心部と反対側に開放された例えばリング状の第1凹部(766)が形成されている。
-第1動圧気体軸受-
図39および図40に示すように、上記第1凹部(766)には、第1動圧気体軸受(780)が嵌め込まれている。この第1動圧気体軸受(780)は、例えば熱伝導率が比較的高い樹脂からなる円筒状のスリーブ(780)によって構成されている。第1動圧気体軸受(780)の外周部には、例えば2つのOリング(781)が装着されている。第1動圧気体軸受(780)は、当該Oリング(781)を介して第1モールド樹脂(765)に固定されている。そして、第1動圧気体軸受(780)は、全体がコイルエンド部(764)と駆動軸(730)の径方向に重なっている。なお、第1動圧気体軸受(780)は、その一部がコイルエンド部(764)と駆動軸(730)の径方向に重なっていてもよい。
図39および図40に示すように、上記第1凹部(766)には、第1動圧気体軸受(780)が嵌め込まれている。この第1動圧気体軸受(780)は、例えば熱伝導率が比較的高い樹脂からなる円筒状のスリーブ(780)によって構成されている。第1動圧気体軸受(780)の外周部には、例えば2つのOリング(781)が装着されている。第1動圧気体軸受(780)は、当該Oリング(781)を介して第1モールド樹脂(765)に固定されている。そして、第1動圧気体軸受(780)は、全体がコイルエンド部(764)と駆動軸(730)の径方向に重なっている。なお、第1動圧気体軸受(780)は、その一部がコイルエンド部(764)と駆動軸(730)の径方向に重なっていてもよい。
第1動圧気体軸受(780)は、インペラ(720)および駆動軸(730)が回転するときに、当該駆動軸(730)のラジアル荷重を非接触で支持する。この場合の支持力は、インペラ(720)および駆動軸(730)の回転速度が大きくなるにつれて大きくなる。
-第2ベアリングレスモータ-
第2ベアリングレスモータ(770)は、電動機室(714)のうちインペラ(720)から遠い側に配置されている。第2ベアリングレスモータ(770)は、電磁力によって駆動軸(730)を回転駆動しかつ駆動軸(730)のラジアル荷重を非接触で支持するように構成されている。第2ベアリングレスモータ(770)は、一対の回転子(771)と固定子(772)を有する。回転子(771)は駆動軸(730)に固定され、固定子(772)はケーシング(710)に固定されている。
第2ベアリングレスモータ(770)は、電動機室(714)のうちインペラ(720)から遠い側に配置されている。第2ベアリングレスモータ(770)は、電磁力によって駆動軸(730)を回転駆動しかつ駆動軸(730)のラジアル荷重を非接触で支持するように構成されている。第2ベアリングレスモータ(770)は、一対の回転子(771)と固定子(772)を有する。回転子(771)は駆動軸(730)に固定され、固定子(772)はケーシング(710)に固定されている。
回転子(771)は、複数の永久磁石(図示せず)が埋設されて円筒状に形成されている。回転子(771)の直径は、駆動軸(730)の直径と実質的に等しい。回転子(771)は、駆動軸(730)に形成された第2小径部(733)(すなわち、駆動軸(730)において周囲よりも直径が小さい部分)に固定されている。なお、回転子(771)の直径は、駆動軸(730)の直径と異なっていてもよい。
固定子(772)は、回転子(771)の外周側に配置されて円筒状に形成されている。固定子(772)には、所定の電流範囲内の電流が流れるコイル(773)が巻回されている。なお、コイル(773)は、分布巻方式で巻回されていてもよく、集中巻方式で巻回されていてもよい。
固定子(772)のコイルエンド部(764)(すなわち、固定子(772)のコア部よりもコイル(773)が軸方向に突出した部分)は、第2モールド樹脂(775)でモールドされている。この第2モールド樹脂(775)のうち固定子(772)の中心部と反対側の内周面には、固定子(772)の中心部と反対側に開放された例えばリング状の第2凹部(776)が形成されている。
-第2動圧気体軸受-
図39および図40に示すように、上記第2凹部(776)には、第2動圧気体軸受(782)が嵌め込まれている。なお、図40では、第2動圧気体軸受(782)を図39の状態から左右反転させて示してある。第2動圧気体軸受(782)は、例えば熱伝導率が比較的高い樹脂からなる円筒状のスリーブ(782)によって構成されている。第2動圧気体軸受(782)の外周部には、例えば2つのOリング(783)が装着されている。第2動圧気体軸受(782)は、当該Oリング(783)を介して第2モールド樹脂(775)に固定されている。そして、第2動圧気体軸受(782)は、全体がコイルエンド部(774)と駆動軸(730)の径方向に重なっている。なお、第2動圧気体軸受(782)は、その一部がコイルエンド部(774)と駆動軸(730)の径方向に重なっていてもよい。
図39および図40に示すように、上記第2凹部(776)には、第2動圧気体軸受(782)が嵌め込まれている。なお、図40では、第2動圧気体軸受(782)を図39の状態から左右反転させて示してある。第2動圧気体軸受(782)は、例えば熱伝導率が比較的高い樹脂からなる円筒状のスリーブ(782)によって構成されている。第2動圧気体軸受(782)の外周部には、例えば2つのOリング(783)が装着されている。第2動圧気体軸受(782)は、当該Oリング(783)を介して第2モールド樹脂(775)に固定されている。そして、第2動圧気体軸受(782)は、全体がコイルエンド部(774)と駆動軸(730)の径方向に重なっている。なお、第2動圧気体軸受(782)は、その一部がコイルエンド部(774)と駆動軸(730)の径方向に重なっていてもよい。
第2動圧気体軸受(782)は、インペラ(720)および駆動軸(730)が回転するときに、当該駆動軸(730)のラジアル荷重を非接触で支持する。この場合の支持力は、インペラ(720)および駆動軸(730)の回転速度が大きくなるにつれて大きくなる。
-実施形態6の効果-
本実施形態では、第1および第2動圧気体軸受(780,782)で駆動軸(730)のラジアル荷重の少なくとも一部を支持することにより、第1および第2ベアリングレスモータ(760,770)が受け持つラジアル荷重を減少させることができる。このため、第1および第2ベアリングレスモータ(760,770)の駆動トルク出力を高めることが可能となる。
本実施形態では、第1および第2動圧気体軸受(780,782)で駆動軸(730)のラジアル荷重の少なくとも一部を支持することにより、第1および第2ベアリングレスモータ(760,770)が受け持つラジアル荷重を減少させることができる。このため、第1および第2ベアリングレスモータ(760,770)の駆動トルク出力を高めることが可能となる。
また、本実施形態では、第1および第2ベアリングレスモータ(760,770)と、第1および第2動圧気体軸受(780,782)と、駆動軸(730)とを含む回転系の軸方向長さを小さく設定することができる。よって、ターボ圧縮機(701)を安全に運転可能な領域を広げることができる。
また、本実施形態では、第1および第2動圧気体軸受(780,782)の全体が、固定子(762,772)のコイルエンド部(764,774)と駆動軸(730)の径方向に重なっている。このため、当該気体軸受(780,782)を単体で設ける場合に比べて回転系の軸方向長さを小さくすることができ、よってターボ圧縮機(701)を安全に運転可能な領域を広げることができる。
《発明の実施形態7》
本発明の実施形態7について説明する。本実施形態のターボ圧縮機(701)は、気体軸受の構成が上記実施形態6のものと異なる。以下では、実施形態6と異なる点について主に説明する。
本発明の実施形態7について説明する。本実施形態のターボ圧縮機(701)は、気体軸受の構成が上記実施形態6のものと異なる。以下では、実施形態6と異なる点について主に説明する。
図41および図42に示すように、第1ベアリングレスモータ(760)の固定子(762)の第1凹部(766)には、第1静圧気体軸受(784)が嵌め込まれている。この第1静圧気体軸受(784)は、例えば熱伝導率が比較的高い樹脂からなる円筒状のスリーブ(784)によって構成されている。第1静圧気体軸受(784)は、内周部が多孔質体(784a)で構成され、外周部が中実体(784b)で構成されている。当該内周部と外周部との間には、好ましくは全周にわたって第1冷媒用空洞(785)が形成されている。
第1冷媒用空洞(785)には、第1静圧気体軸受(784)の外周部を径方向に貫通する貫通孔を介して、第1冷媒導入路(786)がつながっている。この第1冷媒導入路(786)は、ケーシング(710)および第1ベアリングレスモータ(760)のコイルエンド部(764)を径方向に貫通している。第1冷媒導入路(786)は、例えばターボ圧縮機(701)が設けられる冷媒回路(図示せず)が有する凝縮器に連通していて、第1冷媒用空洞(785)に高圧のガス冷媒を導入する。
第1静圧気体軸受(784)の外周部には、例えば2つのOリング(781)が装着されている。第1静圧気体軸受(784)は、当該Oリング(781)を介して第1モールド樹脂(765)に固定されている。そして、第1静圧気体軸受(784)は、全体がコイルエンド部(764)と駆動軸(730)の径方向に重なっている。なお、第1静圧気体軸受(784)は、その一部がコイルエンド部(764)と駆動軸(730)の径方向に重なっていてもよい。
同様に、図41および図42に示すように、第2ベアリングレスモータ(770)の固定子(772)の第2凹部(776)には、第2静圧気体軸受(787)が嵌め込まれている。なお、図42では、第2静圧気体軸受(787)を図41の状態から左右反転させて示してある。第2静圧気体軸受(787)は、例えば熱伝導率が比較的高い樹脂からなる円筒状のスリーブ(787)によって構成されている。第2静圧気体軸受(787)は、内周部が多孔質体(787a)で構成され、外周部が中実体(787b)で構成されている。当該内周部と外周部との間には、好ましくは全周にわたって第2冷媒用空洞(788)が形成されている。
第2冷媒用空洞(788)には、第2静圧気体軸受(787)の外周部を径方向に貫通する貫通孔を介して、第2冷媒導入路(789)がつながっている。この第2冷媒導入路(789)は、ケーシング(710)および第2ベアリングレスモータ(770)のコイルエンド部(774)を径方向に貫通している。第2冷媒導入路(789)は、例えばターボ圧縮機(701)が設けられる冷媒回路が有する凝縮器に連通していて、第2冷媒用空洞(788)に高圧のガス冷媒を導入する。
第2静圧気体軸受(787)の外周部には、例えば2つのOリング(783)が装着されている。第2静圧気体軸受(787)は、当該Oリング(783)を介して第2モールド樹脂(775)に固定されている。そして、第2静圧気体軸受(787)は、全体がコイルエンド部(774)と駆動軸(730)の径方向に重なっている。なお、第2静圧気体軸受(787)は、その一部がコイルエンド部(774)と駆動軸(730)の径方向に重なっていてもよい。
第1および第2静圧気体軸受(784,787)は、第1および第2冷媒用空洞(785,788)に導入されるガス冷媒の圧力を利用して駆動軸(730)のラジアル荷重を非接触で支持する。
本実施形態においても、上記実施形態6と同様の効果を得ることができる。
《発明の実施形態8》
本発明の実施形態8について説明する。
本発明の実施形態8について説明する。
(空気調和装置)
図43は、実施形態8の空気調和装置(810)の構成を例示している。空気調和装置(810)は、冷媒回路(811)を備える。冷媒回路(811)は、ターボ圧縮機(812)と、凝縮器(813)と、膨張弁(814)と、蒸発器(815)とを有していて、冷媒が循環して冷凍サイクルが行われるように構成されている。例えば、凝縮器(813)および蒸発器(815)は、クロスフィン型の熱交換器により構成され、膨張弁(814)は、電動弁により構成されている。
図43は、実施形態8の空気調和装置(810)の構成を例示している。空気調和装置(810)は、冷媒回路(811)を備える。冷媒回路(811)は、ターボ圧縮機(812)と、凝縮器(813)と、膨張弁(814)と、蒸発器(815)とを有していて、冷媒が循環して冷凍サイクルが行われるように構成されている。例えば、凝縮器(813)および蒸発器(815)は、クロスフィン型の熱交換器により構成され、膨張弁(814)は、電動弁により構成されている。
(ターボ圧縮機)
図44は、図43に示したターボ圧縮機(812)の構成を例示している。ターボ圧縮機(812)は、冷媒回路(811)に設けられて後述のインペラ(821)によって冷媒を圧縮するように構成されている。この例では、ターボ圧縮機(812)は、ケーシング(820)と、インペラ(821)と、電動機システム(830)とを備える。電動機システム(830)は、駆動軸(831)と、第1および第2ベアリングレスモータ(840,850)と、制御部(860)と、第1および第2電源部(861,862)とを有する。また、この例では、電動機システム(830)は、第1および第2タッチダウン軸受(871,872)と、スラスト磁気軸受(873)とをさらに有する。
図44は、図43に示したターボ圧縮機(812)の構成を例示している。ターボ圧縮機(812)は、冷媒回路(811)に設けられて後述のインペラ(821)によって冷媒を圧縮するように構成されている。この例では、ターボ圧縮機(812)は、ケーシング(820)と、インペラ(821)と、電動機システム(830)とを備える。電動機システム(830)は、駆動軸(831)と、第1および第2ベアリングレスモータ(840,850)と、制御部(860)と、第1および第2電源部(861,862)とを有する。また、この例では、電動機システム(830)は、第1および第2タッチダウン軸受(871,872)と、スラスト磁気軸受(873)とをさらに有する。
なお、以下の説明において、「軸方向」とは、回転軸方向のことであって、駆動軸(831)の軸心の方向のことであり、「径方向」とは、駆動軸(831)の軸方向と直交する方向のことである。また、「外周側」とは、駆動軸(831)の軸心からより遠い側のことであり、「内周側」とは、駆動軸(831)の軸心により近い側のことである。
〔ケーシング〕
ケーシング(820)は、両端が閉塞された円筒状に形成され、円筒軸線が水平向きとなるように配置されている。ケーシング(820)内の空間は、壁部(820a)によって区画され、壁部(820a)よりも右側の空間がインペラ(821)を収容するインペラ室(S801)を構成し、壁部(820a)よりも左側の空間が第1および第2ベアリングレスモータ(840,850)を収容する電動機室(S802)を構成している。また、電動機室(S802)には、第1および第2ベアリングレスモータ(840,850)と、第1および第2タッチダウン軸受(871,872)と、スラスト磁気軸受(873)とが収容され、これらが電動機室(S802)の内周壁に固定されている。
ケーシング(820)は、両端が閉塞された円筒状に形成され、円筒軸線が水平向きとなるように配置されている。ケーシング(820)内の空間は、壁部(820a)によって区画され、壁部(820a)よりも右側の空間がインペラ(821)を収容するインペラ室(S801)を構成し、壁部(820a)よりも左側の空間が第1および第2ベアリングレスモータ(840,850)を収容する電動機室(S802)を構成している。また、電動機室(S802)には、第1および第2ベアリングレスモータ(840,850)と、第1および第2タッチダウン軸受(871,872)と、スラスト磁気軸受(873)とが収容され、これらが電動機室(S802)の内周壁に固定されている。
〔駆動軸〕
駆動軸(831)は、負荷(821)(この例では、インペラ(821))を回転駆動するために設けられている。この例では、駆動軸(831)は、ケーシング(820)内を軸方向に延びてインペラ(821)と第1および第2ベアリングレスモータ(840,850)とを連結している。具体的には、駆動軸(831)の一端部にインペラ(821)が固定され、駆動軸(831)の中間部に第1および第2ベアリングレスモータ(840,850)が配置されている。また、駆動軸(831)の他端部(すなわち、インペラ(821)が固定された一端部とは反対側の端部)には、円盤状の部分(以下、円盤部(831a)とも言う)が設けられている。なお、円盤部(831a)は、磁性材料(例えば、鉄)で構成されている。
駆動軸(831)は、負荷(821)(この例では、インペラ(821))を回転駆動するために設けられている。この例では、駆動軸(831)は、ケーシング(820)内を軸方向に延びてインペラ(821)と第1および第2ベアリングレスモータ(840,850)とを連結している。具体的には、駆動軸(831)の一端部にインペラ(821)が固定され、駆動軸(831)の中間部に第1および第2ベアリングレスモータ(840,850)が配置されている。また、駆動軸(831)の他端部(すなわち、インペラ(821)が固定された一端部とは反対側の端部)には、円盤状の部分(以下、円盤部(831a)とも言う)が設けられている。なお、円盤部(831a)は、磁性材料(例えば、鉄)で構成されている。
〔インペラ(負荷)〕
インペラ(821)は、複数の羽根によって外形が略円錐形状となるように形成され、駆動軸(831)の一端部に固定された状態で、インペラ室(S801)に収容されている。インペラ室(S801)には、吸入管(P801)および吐出管(P802)が接続されている。吸入管(P801)は、冷媒(流体)を外部からインペラ室(S801)に導くために設けられている。吐出管(P802)は、インペラ室(S801)内で圧縮された高圧の冷媒(流体)を外部へ戻すために設けられている。すなわち、この例では、インペラ(821)とインペラ室(S801)とによって圧縮機構が構成されている。
インペラ(821)は、複数の羽根によって外形が略円錐形状となるように形成され、駆動軸(831)の一端部に固定された状態で、インペラ室(S801)に収容されている。インペラ室(S801)には、吸入管(P801)および吐出管(P802)が接続されている。吸入管(P801)は、冷媒(流体)を外部からインペラ室(S801)に導くために設けられている。吐出管(P802)は、インペラ室(S801)内で圧縮された高圧の冷媒(流体)を外部へ戻すために設けられている。すなわち、この例では、インペラ(821)とインペラ室(S801)とによって圧縮機構が構成されている。
〔ベアリングレスモータ〕
第1および第2ベアリングレスモータ(840,850)は、互いに同じ構成を有する。このため、ここでは、第1ベアリングレスモータ(840)の構成のみを説明する。
第1および第2ベアリングレスモータ(840,850)は、互いに同じ構成を有する。このため、ここでは、第1ベアリングレスモータ(840)の構成のみを説明する。
第1ベアリングレスモータ(840)は、一対の回転子(841)と固定子(844)とを有して駆動軸(831)を回転駆動しかつ駆動軸(831)のラジアル荷重を非接触で支持するように構成されている。回転子(841)は、駆動軸(831)に固定され、固定子(844)は、ケーシング(820)の内周壁に固定されている。
図45に示すように、この例では、第1ベアリングレスモータ(840)は、コンセクエントポール型のベアリングレスモータによって構成されている。
第1ベアリングレスモータ(840)の回転子(841)は、回転子コア(842)と、回転子コア(842)に埋設された複数(この例では、4つ)の永久磁石(843)とを有する。回転子コア(842)は、磁性材料(例えば、積層鋼板)で構成され、円柱状に形成されている。回転子コア(842)の中央部には、駆動軸(831)を挿通するためのシャフト孔が形成されている。
複数の永久磁石(843)は、回転子(841)の周方向において所定の角度ピッチ(この例では、90°の角度ピッチ)で配置されている。そして、4つの永久磁石(843)の外周面側がN極となっており、回転子コア(842)の外周面のうち回転子(841)の周方向において4つの永久磁石(843)の間に位置する部分が擬似的にS極となっている。なお、4つの永久磁石(843)の外周面側がS極となっていてもよい。
第1ベアリングレスモータ(840)の固定子(844)は、磁性材料(例えば、積層鋼板)で構成されていて、バックヨーク部(845)と、複数のティース部(図示せず)と、ティース部に巻回された電機子巻線(846a~846c)および支持巻線(847a~847c)とを有する。バックヨーク部(845)は、円筒状に構成されている。電機子巻線(846a~846c)および支持巻線(847a~847c)は、各ティース部に分布巻方式で巻回されている。なお、電機子巻線(846a~846c)および支持巻線(847a~847c)は、各ティース部に集中巻方式で巻回されていてもよい。
電機子巻線(846a~846c)は、ティース部のうち内周側に巻回された巻線である。電機子巻線(846a~846c)は、図45において太実線で囲んで示したU相電機子巻線(846a)と、図45において太破線で囲んで示したV相電機子巻線(846b)と、図45において細実線で囲んで示したW相電機子巻線(846c)とから構成されている。
支持巻線(847a~847c)は、ティース部のうち外周側に巻回された巻線である。支持巻線(847a~847c)は、図45において太実線で囲んで示したU相支持巻線(847a)と、図45において太破線で囲んで示したV相支持巻線(847b)と、図45において細実線で囲んで示したW相支持巻線(847c)とから構成されている。
〔タッチダウン軸受〕
第1タッチダウン軸受(871)は、駆動軸(831)の一端部(図43における右端部)の近傍に設けられ、第2タッチダウン軸受(872)は、駆動軸(831)の他端部の近傍に設けられている。第1および第2タッチダウン軸受(871,872)は、第1および第2ベアリングレスモータ(840,850)が非通電であるとき(すなわち、駆動軸(831)が浮上していないとき)に駆動軸(831)を支持するように構成されている。
第1タッチダウン軸受(871)は、駆動軸(831)の一端部(図43における右端部)の近傍に設けられ、第2タッチダウン軸受(872)は、駆動軸(831)の他端部の近傍に設けられている。第1および第2タッチダウン軸受(871,872)は、第1および第2ベアリングレスモータ(840,850)が非通電であるとき(すなわち、駆動軸(831)が浮上していないとき)に駆動軸(831)を支持するように構成されている。
〔スラスト磁気軸受〕
スラスト磁気軸受(873)は、第1および第2スラスト電磁石(874a,874b)を有し、駆動軸(831)の円盤部(831a)を電磁力によって非接触で支持するように構成されている。具体的には、第1および第2スラスト電磁石(874a,874b)は、それぞれが円環状に形成され、駆動軸(831)の円盤部(831a)を挟んで互いに対向し、第1および第2スラスト電磁石(874a,874b)の合成電磁力により駆動軸(831)の円盤部(831a)を非接触に支持する。
スラスト磁気軸受(873)は、第1および第2スラスト電磁石(874a,874b)を有し、駆動軸(831)の円盤部(831a)を電磁力によって非接触で支持するように構成されている。具体的には、第1および第2スラスト電磁石(874a,874b)は、それぞれが円環状に形成され、駆動軸(831)の円盤部(831a)を挟んで互いに対向し、第1および第2スラスト電磁石(874a,874b)の合成電磁力により駆動軸(831)の円盤部(831a)を非接触に支持する。
〔各種センサ〕
電動機システム(830)の各部には、位置センサや電流センサや回転速度センサなどの各種センサ(図示を省略)が設けられている。例えば、第1および第2ベアリングレスモータ(840,850)には、回転子(841,851)のラジアル方向(径方向)における位置に応じた検出信号を出力する位置センサ(図示を省略)が設けられ、スラスト磁気軸受(873)には、駆動軸(831)のスラスト方向(軸方向)における位置に応じた検出信号を出力する位置センサ(図示を省略)が設けられている。これらの位置センサは、例えば、測定対象物との間のギャップ(距離)を検出する渦電流式の変位センサによって構成されている。
電動機システム(830)の各部には、位置センサや電流センサや回転速度センサなどの各種センサ(図示を省略)が設けられている。例えば、第1および第2ベアリングレスモータ(840,850)には、回転子(841,851)のラジアル方向(径方向)における位置に応じた検出信号を出力する位置センサ(図示を省略)が設けられ、スラスト磁気軸受(873)には、駆動軸(831)のスラスト方向(軸方向)における位置に応じた検出信号を出力する位置センサ(図示を省略)が設けられている。これらの位置センサは、例えば、測定対象物との間のギャップ(距離)を検出する渦電流式の変位センサによって構成されている。
〔制御部〕
制御部(860)は、駆動軸(831)が非接触で支持された状態で駆動軸(831)の回転速度が予め定められた目標回転速度となるように、電動機システム(830)の各部に設けられた各種センサからの検出信号や駆動軸(831)の目標回転速度などの情報に基づいて、電機子電圧指令値および支持電圧指令値と、スラスト電圧指令値とを生成して出力するように構成されている。電機子電圧指令値は、第1および第2ベアリングレスモータ(840,850)の電機子巻線(846a~846c,856a~856c)に供給される電圧を制御するための指令値である。支持電圧指令値は、第1および第2ベアリングレスモータ(840,850)の支持巻線(847a~847c,857a~857c)に供給される電圧を制御するための指令値である。スラスト電圧指令値は、スラスト磁気軸受(873)の第1および第2スラスト電磁石(874a,874b)の巻線(図示せず)に供給される電圧を制御するための指令値である。制御部(860)は、例えば、CPUなどの演算処理部や、演算処理部を動作させるためのプログラムや情報を記憶するメモリなどの記憶部などによって構成されている。
制御部(860)は、駆動軸(831)が非接触で支持された状態で駆動軸(831)の回転速度が予め定められた目標回転速度となるように、電動機システム(830)の各部に設けられた各種センサからの検出信号や駆動軸(831)の目標回転速度などの情報に基づいて、電機子電圧指令値および支持電圧指令値と、スラスト電圧指令値とを生成して出力するように構成されている。電機子電圧指令値は、第1および第2ベアリングレスモータ(840,850)の電機子巻線(846a~846c,856a~856c)に供給される電圧を制御するための指令値である。支持電圧指令値は、第1および第2ベアリングレスモータ(840,850)の支持巻線(847a~847c,857a~857c)に供給される電圧を制御するための指令値である。スラスト電圧指令値は、スラスト磁気軸受(873)の第1および第2スラスト電磁石(874a,874b)の巻線(図示せず)に供給される電圧を制御するための指令値である。制御部(860)は、例えば、CPUなどの演算処理部や、演算処理部を動作させるためのプログラムや情報を記憶するメモリなどの記憶部などによって構成されている。
〔電源部〕
第1電源部(861)は、制御部(860)から出力された電機子電圧指令値に基づいて、第1および第2ベアリングレスモータ(840,850)の電機子巻線(846a~846c,856a~856c)に電圧を供給するように構成されている。第2電源部(862)は、制御部(860)から出力された支持電圧指令値に基づいて、第1および第2ベアリングレスモータ(840,850)の支持巻線(847a~847c,857a~857c)に電圧を供給するように構成されている。第1および第2ベアリングレスモータ(840,850)の電機子巻線(846a~846c,856a~856c)および支持巻線(847a~847c,857a~857c)に印加される電圧を制御することにより、各巻線(846a~846c,856a~856c, 847a~847c,857a~857c)を流れる電流を制御して第1および第2ベアリングレスモータ(840,850)が発生するトルクおよび支持力を制御することができる。第1および第2電源部(861,862)は、例えば、PWM(Pulse Width Modulation)アンプによって構成されている。第1および第2電源部(861,862)は、電源部を構成している。
第1電源部(861)は、制御部(860)から出力された電機子電圧指令値に基づいて、第1および第2ベアリングレスモータ(840,850)の電機子巻線(846a~846c,856a~856c)に電圧を供給するように構成されている。第2電源部(862)は、制御部(860)から出力された支持電圧指令値に基づいて、第1および第2ベアリングレスモータ(840,850)の支持巻線(847a~847c,857a~857c)に電圧を供給するように構成されている。第1および第2ベアリングレスモータ(840,850)の電機子巻線(846a~846c,856a~856c)および支持巻線(847a~847c,857a~857c)に印加される電圧を制御することにより、各巻線(846a~846c,856a~856c, 847a~847c,857a~857c)を流れる電流を制御して第1および第2ベアリングレスモータ(840,850)が発生するトルクおよび支持力を制御することができる。第1および第2電源部(861,862)は、例えば、PWM(Pulse Width Modulation)アンプによって構成されている。第1および第2電源部(861,862)は、電源部を構成している。
(ターボ圧縮機の運転領域)
図7は、ターボ圧縮機(812)の運転領域について説明するための図である。同図において、横軸は冷媒体積流量を、縦軸はヘッドをそれぞれ示す。ターボ圧縮機(812)は、第1および第2電源部(861,862)によって電力を供給されることにより、所定の運転領域において運転され得る。
図7は、ターボ圧縮機(812)の運転領域について説明するための図である。同図において、横軸は冷媒体積流量を、縦軸はヘッドをそれぞれ示す。ターボ圧縮機(812)は、第1および第2電源部(861,862)によって電力を供給されることにより、所定の運転領域において運転され得る。
この所定の運転領域は、主に、図7に太線で示すサージラインの内側の定常運転領域(A)、高負荷トルク領域(B)およびタービュランス領域(C)と、当該サージラインの外側のサージング領域(D)とを含む。本明細書では、高負荷トルク領域(B)のことを、「ターボ圧縮機(812)の最大駆動トルクが必要となる領域」とも呼ぶ。また、タービュランス領域(C)のことを「旋回失速が生じる領域」とも呼ぶ。
定常運転領域(A)は、図7に符号Aで示す領域であって、インペラ(821)および駆動軸(831)の負荷トルク(すなわち、インペラ(821)および駆動軸(831)を回転駆動するためのトルク)が比較的小さく、かつ駆動軸(831)のラジアル荷重も比較的小さい領域である。
高負荷トルク領域(B)は、図7に符号Bで示す領域であって、インペラ(821)および駆動軸(831)の負荷トルクが比較的大きく、かつ駆動軸(831)のラジアル荷重も比較的大きい領域である。ターボ圧縮機(812)におけるインペラ(821)および駆動軸(831)の負荷トルクは、この高負荷トルク領域(B)のうち図7中で最も右上の点において最大となる。ただし、ターボ圧縮機(812)における駆動軸(831)のラジアル荷重は、高負荷トルク領域(B)では最大にはならない。
タービュランス領域(C)は、図7に符号Cで示す領域であって、インペラ(821)および駆動軸(831)の負荷トルクは比較的小さい一方、駆動軸(831)のラジアル荷重は比較的大きい領域である。
サージング領域(D)は、図7に符号Dで示す領域であって、停電時などの非常の事態においてターボ圧縮機(812)がこのサージング領域(D)において一時的に運転されることがある。サージング領域(D)は、インペラ(821)および駆動軸(831)の負荷トルクは比較的小さい一方、駆動軸(831)のラジアル荷重は比較的大きい領域である。ターボ圧縮機(812)における駆動軸(831)のラジアル荷重は、このサージング領域(D)中の所定の点において最大となる。
(制御部および電源部の動作)
制御部(860)および第1および第2電源部(861,862)の動作について説明する。制御部(860)は、ターボ圧縮機(812)の状態に応じたラジアル荷重を支持するためのラジアル支持力を出力するよう、第1および第2ベアリングレスモータ(840,850)の電機子巻線(846a~846c,856a~856c)と支持巻線(847a~847c,857a~857c)に電圧を供給し、電機子電流IAと支持電流ISを流す。
制御部(860)および第1および第2電源部(861,862)の動作について説明する。制御部(860)は、ターボ圧縮機(812)の状態に応じたラジアル荷重を支持するためのラジアル支持力を出力するよう、第1および第2ベアリングレスモータ(840,850)の電機子巻線(846a~846c,856a~856c)と支持巻線(847a~847c,857a~857c)に電圧を供給し、電機子電流IAと支持電流ISを流す。
ここで、ラジアル支持力は、支持電流ISに起因するラジアル支持力と、電機子電流IAと支持電流ISの両方に起因するラジアル支持力(本明細書では、電機子電流IAに起因するラジアル支持力とも言う)との和である。電機子電流IAと支持電流ISの両方に起因するラジアル支持力は、電機子電流IAのd軸成分(以下、d軸電流)を増加させると増加し、d軸電流を減少させると減少し、電機子電流IAのq軸成分(以下、q軸電流)の絶対値を増加させると増加し、q軸電流の絶対値を減少させると減少する。
制御部(860)は、例えば定常運転領域(A)において、電機子巻線(846a~846c,856a~856c)に対し、電機子電流IAに対して最も効率的にトルクを発生させるように第1電源部(861)を制御し(いわゆる、最大トルク/電流制御)、支持巻線(847a~847c,857a~857c)に対してはターボ圧縮機(812)の状態に応じたラジアル支持力を出力するよう第2電源部(862)を制御する。なお、定常運転領域(A)での第1電源部(861)の制御方法は、最大トルク/電流制御以外であってもよく、例えば最大効率制御(損失を最小とする制御)や、力率1制御(力率を実質的に1とする制御)を採用してもよい。
また、制御部(860)は、例えば定常運転領域(A)以外の領域において、第1および第2ベアリングレスモータ(840,850)の電機子巻線(846a~846c,856a~856c)にかかる電圧である電機子電圧VAと、支持巻線(847a~847c,857a~857c)に流れる電流である支持電流ISとの一方を増大させかつ他方を低減させるように第1および第2電源部(861,862)を制御する。以下、そのような制御のいくつかの例について説明する。
〔強め磁束制御〕
制御部(860)は、例えば、負荷トルクが比較的小さい一方でラジアル荷重が大きくなるタービュランス領域(C)およびサージング領域(D)、ターボ圧縮機(812)の運転終了時、ならびにターボ圧縮機(812)の始動時において、電機子巻線(846a~846c,856a~856c)の強め磁束制御(すなわち、正のd軸電流を流す制御)を行う。
制御部(860)は、例えば、負荷トルクが比較的小さい一方でラジアル荷重が大きくなるタービュランス領域(C)およびサージング領域(D)、ターボ圧縮機(812)の運転終了時、ならびにターボ圧縮機(812)の始動時において、電機子巻線(846a~846c,856a~856c)の強め磁束制御(すなわち、正のd軸電流を流す制御)を行う。
ここで、制御部(860)は、第1電源部(861)に対する電機子電圧指令値を増大させて第1および第2ベアリングレスモータ(840,850)における電機子電圧VAを増大させると共に、第2電源部(862)に対する支持電圧指令値を低減させて第1および第2ベアリングレスモータ(840,850)における支持電流ISを低減させる。また、制御部(860)は、第1および第2ベアリングレスモータ(840,850)における支持電流ISが所定の第1上限値(例えば、第2電源部(862)の電源容量によって定まる)を超えないように第1および第2電源部(861,862)を制御する。これにより、支持電流ISを増大させるのではなく、電機子巻線(846a~846c,856a~856c)に流れる電流である電機子電流IAを増大させてラジアル支持力を増大させることができる。よって、第1および第2ベアリングレスモータ(840,850)によって発生可能な最大ラジアル支持力に対して、第2電源部(862)の電源容量を比較的小さく設定することが可能となる。
また、制御部(860)は、例えば、支持巻線(847a~847c,857a~857c)の温度が所定の基準値以上になった場合に、第1電源部(861)で強め磁束制御を行うと共に、第2電源部(862)で支持電流ISを低減させてもよい。これにより、ラジアル支持力を維持しつつ、支持巻線(847a~847c,857a~857c)での銅損を低減してその過剰な温度上昇を抑止することができ、よってターボ圧縮機(812)の信頼性を向上させることができる。
また、制御部(860)は、例えば、第1および第2ベアリングレスモータ(840,850)の回転速度が比較的小さく、そのために電機子電圧VAが比較的小さい場合に、第1電源部(861)で強め磁束制御を行うと共に、第2電源部(862)で支持電流ISを低減させてもよい。これにより、ラジアル支持力を維持しつつ電機子電圧VAを増大させることができ、電機子電圧VAの出力精度の向上を通じて第1および第2ベアリングレスモータ(840,850)の制御性を向上させることができる。
また、制御部(860)は、第1および第2ベアリングレスモータ(840,850)における回転子(841,851)と固定子(844,854)との間のエアギャップに油が存在する場合に、第1電源部(861)で強め磁束制御を行うと共に、第2電源部(862)で支持電流ISを低減させてもよい。これにより、電機子巻線(846a~846c,856a~856c)における銅損および鉄損を増大させてその発熱によってエアギャップ内の油を温め、当該油の粘性を低くし、よって第1および第2ベアリングレスモータ(840,850)の回転損失を低減することができる。
また、制御部(860)は、空気調和装置(810)が暖房運転を行う場合に、第1電源部(861)で強め磁束制御を行うと共に、第2電源部(862)で支持電流ISを低減させてもよい。これにより、電機子巻線(846a~846c,856a~856c)における銅損および鉄損を増大させてその発熱によって電動機室(S802)内に存在する冷媒を加熱することができる。当該加熱によって冷媒に蓄えられた熱は、凝縮器(813)において対象空間の空気中に放出される。したがって、空気調和装置(810)の暖房能力を向上させることができる。
また、制御部(860)は、第1および第2ベアリングレスモータ(840,850)の永久磁石(843,853)の減磁耐力が小さい場合に、第1電源部(861)で強め磁束制御を行うと共に、第2電源部(862)で支持電流ISを低減させてもよい。支持電流ISが作る磁束は永久磁石(843,853)の減磁を生じさせるおそれがあるが、このような制御を行うことによって減磁を生じさせにくくすることができる。したがって、保磁力の小さな永久磁石(843,853)を利用できるため低コスト化が可能となると同時に、第1および第2ベアリングレスモータ(840,850)の設計自由度を高めることができる。
〔弱め磁束制御〕
制御部(860)は、例えば、高速運転領域において、電機子巻線(846a~846c,856a~856c)の弱め磁束制御(すなわち、負のd軸電流を流す制御)を行う。なお、高速運転領域とは、弱め磁束制御を行わない場合に電機子電圧VAが所定の第2上限値(例えば、第1電源部(861)の電源容量によって定まる)に達する回転速度を上回る回転速度での運転を行う領域を言う。また、弱め磁束制御を行う場合にはそれを行わない場合よりも電機子電流IAが増大する。
制御部(860)は、例えば、高速運転領域において、電機子巻線(846a~846c,856a~856c)の弱め磁束制御(すなわち、負のd軸電流を流す制御)を行う。なお、高速運転領域とは、弱め磁束制御を行わない場合に電機子電圧VAが所定の第2上限値(例えば、第1電源部(861)の電源容量によって定まる)に達する回転速度を上回る回転速度での運転を行う領域を言う。また、弱め磁束制御を行う場合にはそれを行わない場合よりも電機子電流IAが増大する。
ここで、制御部(860)は、第2電源部(862)に対する支持電圧指令値を増大させて第1および第2ベアリングレスモータ(840,850)における支持電流ISを増大させると共に、第1電源部(861)に対する電機子電圧指令値を低減させて第1および第2ベアリングレスモータ(840,850)における電機子電圧VAを低減させる。また、制御部(860)は、第1および第2ベアリングレスモータ(840,850)における電機子電圧VAが上記第2上限値を超えないように第1および第2電源部(861,862)を制御する。これにより、電機子電圧VAを増大させることなく高速運転領域でターボ圧縮機(812)を運転することができると共に、支持電流ISの増大によって弱め磁束制御に伴うラジアル支持力の低下を補うことができる。よって、ターボ圧縮機(812)の運転速度領域の広さに対して、第1電源部(861)の電源容量を比較的小さく設定することができる。
また、制御部(860)は、例えば、ターボ圧縮機(812)の始動時において弱め磁束制御を行ってもよい。ターボ圧縮機(812)の始動時には、駆動軸(831)が第1および第2タッチダウン軸受(871,872)で支持されているため、第1および第2ベアリングレスモータ(840,850)の永久磁石(843,853)の磁力に起因して比較的大きなラジアル支持力が必要となるところ、弱め磁束制御によって永久磁石(843,853)の磁力を擬似的に弱め、必要なラジアル支持力を低減させ、よって第1および第2ベアリングレスモータ(840,850)の制御性を向上させることができる。
また、制御部(860)は、第1および第2ベアリングレスモータ(840,850)における回転子(841,851)と固定子(844,854)との間のエアギャップに油が存在する場合に、弱め磁束制御を行うと共に支持電流ISを増大させてもよい。これにより、支持巻線(847a~847c,857a~857c)における銅損を増大させてその発熱によってエアギャップ内の油を温め、当該油の粘性を低くし、よって第1および第2ベアリングレスモータ(840,850)の回転損失を低減することができる。
また、制御部(860)は、空気調和装置(810)が暖房運転を行う場合に、弱め磁束制御を行うと共に支持電流ISを増大させてもよい。これにより、支持巻線(847a~847c,857a~857c)における銅損を増大させてその発熱によって電動機室(S802)内に存在する冷媒を加熱することができる。当該加熱によって冷媒に蓄えられた熱は、凝縮器(813)において対象空間の空気中に放出される。したがって、空気調和装置(810)の暖房能力を向上させることができる。
〔回生制御〕
制御部(860)は、例えば、ラジアル荷重が大きくなる運転終了時において、回生制御(すなわち、負のq軸電流を流す制御)を行う。
制御部(860)は、例えば、ラジアル荷重が大きくなる運転終了時において、回生制御(すなわち、負のq軸電流を流す制御)を行う。
ここで、制御部(860)は、第1電源部(861)に対する電機子電圧指令値を増大させて第1および第2ベアリングレスモータ(840,850)における電機子電圧VAを増大させると共に、第2電源部(862)に対する支持電圧指令値を低減させて第1および第2ベアリングレスモータ(840,850)における支持電流ISを低減させる。また、制御部(860)は、第1および第2ベアリングレスモータ(840,850)における支持電流ISが上記第1上限値を超えないように第1および第2電源部(861,862)を制御する。これにより、支持電流ISを増大させるのではなく、電機子電流IAを増大させてラジアル支持力を増大させることができる。よって、第1および第2ベアリングレスモータ(840,850)によって発生可能な最大ラジアル支持力に対して、第2電源部(862)の電源容量を比較的小さく設定することが可能となる。また、回転エネルギーを回生することによってターボ圧縮機(812)の省エネルギー化を図ると共に、回転を停止するための時間を短縮することができる。
また、制御部(860)は、第1電源部(861)で正のq軸電流を流しながら第1および第2ベアリングレスモータ(840,850)を制御している場合にラジアル荷重が急激に大きくなったとき、当該正のq軸電流よりも絶対値の大きい負のq軸電流を流す回生制御を行ってもよい。これにより、第2電源部(862)で支持電流ISを増大させることなく、ラジアル支持力を増大させることができる。なお、同様の効果を奏するものとして、正のq軸電流の絶対値を極性の反転なく大きくすることも考えられる。
-実施形態8の効果-
本実施形態の電動機システム(830)は、電機子巻線(846a~846c,856a~856c)にかかる電圧である電機子電圧VAと、支持巻線(847a~847c,857a~857c)に流れる電流である支持電流ISとの一方を増大させかつ他方を低減させるように、第1および第2電源部(861,862)を制御する制御部(860)とを備える。したがって、電機子電圧VAと支持電流ISの一方を増大させかつ他方を低減させることにより、電動機システム(830)が適用されるアプリケーションの動作状況に応じて、第1および第2電源部(861,862)の各々の電源容量の範囲内で電機子電圧VAおよび支持電流ISを調節することができる。すなわち、第1電源部(861)および第2電源部(862)の電源容量がそれぞれ限られているところ、第1および第2ベアリングレスモータ(840,850)において所望の出力を得るために一方の電源部(861,862)の電源容量が不足する場合に、他方の電源部(861,862)によってこの不足分を補うことができる。
本実施形態の電動機システム(830)は、電機子巻線(846a~846c,856a~856c)にかかる電圧である電機子電圧VAと、支持巻線(847a~847c,857a~857c)に流れる電流である支持電流ISとの一方を増大させかつ他方を低減させるように、第1および第2電源部(861,862)を制御する制御部(860)とを備える。したがって、電機子電圧VAと支持電流ISの一方を増大させかつ他方を低減させることにより、電動機システム(830)が適用されるアプリケーションの動作状況に応じて、第1および第2電源部(861,862)の各々の電源容量の範囲内で電機子電圧VAおよび支持電流ISを調節することができる。すなわち、第1電源部(861)および第2電源部(862)の電源容量がそれぞれ限られているところ、第1および第2ベアリングレスモータ(840,850)において所望の出力を得るために一方の電源部(861,862)の電源容量が不足する場合に、他方の電源部(861,862)によってこの不足分を補うことができる。
また、本実施形態の電動機システム(830)は、上記制御部(860)が、上記電機子電圧VAを増大させて上記支持電流ISが低減するように、または、上記支持電流ISを増大させて上記電機子電圧VAが低減するように、上記第1および第2電源部(861.862)を制御する。このような制御によると、電動機システム(830)の運転領域を広げることができる。
また、本実施形態の電動機システム(830)は、制御部(860)が、電機子電圧VAを増大させて支持電流ISが所定の第1上限値を超えないように、第1および第2電源部(861,862)を制御する。したがって、支持電流ISが第1上限値を超えないようにできる一方、電機子巻線(846a~846c,856a~856c)に流れる電流である電機子電流IAに起因するラジアル支持力を増大させることができる。このことは、例えば第1電源部(861)で強め磁束制御を行う場合に相当する。支持電流ISが第1上限値またはその近傍に達した状態でラジアル支持力を増大させる場合に特に効果的である。
また、本実施形態の電動機システム(830)は、制御部(860)が、支持電流ISを増大させて電機子電圧VAが所定の第2上限値を超えないように、第1および第2電源部(861,862)を制御する。したがって、電機子電圧VAが第2上限値を超えないようにできるが、例えば第1および第2ベアリングレスモータ(840,850)の回転速度を上昇させていくと電機子電流IAに起因するラジアル支持力が低下するおそれがある。このことは、例えば第1電源部(861)で弱め磁束制御を行う場合に相当する。これに対し、第2電源部(862)で支持電流ISを増大させることによってそれに起因するラジアル支持力で当該低下を補うことができる。
また、本実施形態の電動機システム(830)は、制御部(860)が、電機子電圧VAを低減させて支持電流ISが増大するように、または、支持電流ISを低減させて電機子電圧VAが増大するように、第1および第2電源部(861,862)を制御する。このような制御によると、例えば、電機子巻線(846a~846c,856a~856c)または支持巻線(847a~847c,857a~857c)における発熱を必要に応じて利用することができる。
また、本実施形態の電動機システム(830)は、制御部(860)が、電機子電圧VAを低減させて支持電流ISが所定の第1下限値を超えるように、第1および第2電源部(861,862)を制御する。したがって、支持電流ISが第1下限値を超えるようにすることができる。これにより、例えば、支持巻線(847a~847c,857a~857c)における発熱を必要に応じて利用したり、支持電流ISの検出精度の向上を通じて第1および第2ベアリングレスモータ(840,850)の制御性を向上させることができる。
また、本実施形態の電動機システム(830)は、制御部(860)が、支持電流ISを低減させて電機子電圧VAが所定の第2下限値を超えるように、第1および第2電源部(861,862)を制御する。したがって、電機子電圧VAが第2下限値を超えるようにすることができる。これにより、例えば、電機子巻線(846a~846c,856a~856c)における発熱を必要に応じて利用したり、電機子電圧VAの出力精度の向上を通じて第1および第2ベアリングレスモータ(840,850)の制御性を向上させることができる。
また、本実施形態のターボ圧縮機(812)は、本実施形態の電動機システム(830)と、電動機システム(830)の駆動軸(831)に連結された負荷(821)としてインペラ(821)とを備える。したがって、ターボ圧縮機(812)において、第1および第2ベアリングレスモータ(840,850)によりインペラ(821)が回転駆動される。
また、本実施形態のターボ圧縮機(812)は、冷凍サイクルを行う冷媒回路(811)に設けられてインペラ(821)によって冷媒を圧縮するように構成され、ターボ圧縮機(812)を旋回失速が生じる領域(C)またはサージング領域(D)で運転する場合、制御部(860)は、電機子電圧VAを増大させて支持電流ISが所定の第1上限値を超えないように、第1および第2電源部(861,862)を制御する。したがって、第1および第2ベアリングレスモータ(840,850)の負荷トルクが小さい一方で必要なラジアル支持力が大きい場合に、電機子電流IAに起因するラジアル支持力を増大させることができる。したがって、支持電流ISを第1上限値以下に抑制していても、電機子電流IAの増大によって第1および第2ベアリングレスモータ(840,850)のラジアル支持力を増大させることができる。
《発明の実施形態9》
本発明の実施形態9について説明する。図46に示すように、本実施形態の冷凍装置(900)は、互いに接続された冷媒回路(911)および水回路(920)を備え、空調設備用機器を構成している。冷媒回路(911)には冷媒が充填され、水回路(920)には水(または、不凍液)が充填されている。冷凍装置(900)は、後述の四路切換弁(912)の状態を切り替えることにより、空調対象空間の冷房および暖房の両方を行うことができる。なお、冷凍装置(900)は、四路切換弁(912)を備えない冷房専用または暖房専用のものであってもよい。
本発明の実施形態9について説明する。図46に示すように、本実施形態の冷凍装置(900)は、互いに接続された冷媒回路(911)および水回路(920)を備え、空調設備用機器を構成している。冷媒回路(911)には冷媒が充填され、水回路(920)には水(または、不凍液)が充填されている。冷凍装置(900)は、後述の四路切換弁(912)の状態を切り替えることにより、空調対象空間の冷房および暖房の両方を行うことができる。なお、冷凍装置(900)は、四路切換弁(912)を備えない冷房専用または暖房専用のものであってもよい。
ここで、空調対象空間の例として、特定の建造物(例えば、ビルや船舶)において互いに仕切られた複数の部屋や、特定の大型施設(例えば、ドームや総合競技場)における比較的大きな空間の一部を挙げることができる。そして、当該複数の部屋の各々に後述の利用ユニット(921)が1つずつ設けられていてもよいし、2つ以上設けられていてもよい。また、当該比較的大きな空間に設けられる利用ユニット(921)の数も任意に選択可能である。冷凍装置(900)は、各利用ユニット(921)に対応する空調対象空間ごとに個別に温度調節できるように構成されていることが好ましい。
冷媒回路(911)は、熱源ユニット(910)に収容されている。冷媒回路(911)は、上記実施形態1~8のいずれかのターボ圧縮機(101,210,410,601,701,812)と、四路切換弁(912)と、利用側熱交換器(922)と、膨張弁(914)と、水/冷媒熱交換器(915)とを有する。熱源側熱交換器(913)の近傍には、これに空気を送るための熱源側ファン(916)が設けられている。冷媒回路(911)は、ターボ圧縮機(101,210,410,601,701,812)と、四路切換弁(912)と、利用側熱交換器(922)と、膨張弁(914)と、水/冷媒熱交換器(915)とが互いに冷媒配管で接続され、ターボ圧縮機(101,210,410,601,701,812)および熱源側ファン(916)を運転して冷凍サイクルを行うように構成されている。
水回路(920)は、互いに並列接続された複数(この例では、3つ)の利用側熱交換器(922)と、各利用側熱交換器(922)に対して1つずつ設けられ、利用側熱交換器(922)に対する水の流量を調節するための流量調節弁(923)と、水回路(920)で水を循環させるためのポンプ(924)とを有する。各利用側熱交換器(922)の近傍には、これに空気を送るための利用側ファン(925)が設けられている。利用側熱交換器(922)、流量調節弁(923)、および利用側ファン(925)は、利用ユニット(921)(例えば、ファンコイルユニット)に収容されている。各利用ユニット(921)は、空調対象空間に配置されている。水回路(920)は、複数の利用側熱交換器(922)と、ポンプ(924)と、水/冷媒熱交換器(915)とが互いに水配管で接続され、ポンプ(924)および利用側ファン(925)を運転して空調対象空間の空気調和を行うように構成されている。
〈冷凍装置の運転動作〉
冷凍装置(900)は、四路切換弁(912)の状態を切り替えることによって、暖房運転および冷房運転を行うことができる。ここで、暖房運転を行うための四路切換弁(912)の状態を第1状態(図46に破線で示す状態)とし、冷房運転を行うための四路切換弁(912)の状態を第2状態(図46に実線で示す状態)とする。
冷凍装置(900)は、四路切換弁(912)の状態を切り替えることによって、暖房運転および冷房運転を行うことができる。ここで、暖房運転を行うための四路切換弁(912)の状態を第1状態(図46に破線で示す状態)とし、冷房運転を行うための四路切換弁(912)の状態を第2状態(図46に実線で示す状態)とする。
冷凍装置(900)は、四路切換弁(912)を第1状態に切り替えると共に、ターボ圧縮機(101,210,410,601,701,812)、熱源側ファン(916)、ポンプ(924)、および利用側ファン(925)を運転することで空調対象空間の暖房運転を行う。このとき、水/冷媒熱交換器(915)では、ターボ圧縮機(101,210,410,601,701,812)から吐出された高圧のガス冷媒から水に熱が伝えられ、熱を受け取った水は各利用側熱交換器(922)において、利用側ファン(925)によって送られてきた空調対象空間の空気を加熱する。これにより、空調対象空間の暖房が行われる。なお、熱源側熱交換器(913)では、熱源側ファン(916)によって送られてきた空気(例えば、室外空気)から低圧の液冷媒に熱が伝えられる。
また、冷凍装置(900)は、四路切換弁(912)を第2状態に切り替えると共に、ターボ圧縮機(101,210,410,601,701,812)、熱源側ファン(916)、ポンプ(924)、および利用側ファン(925)を運転することで空調対象空間の冷房運転を行う。このとき、水/冷媒熱交換器(915)では、膨張弁(914)で減圧された低圧の液冷媒が水から熱を奪い、熱を奪われた水は各利用側熱交換器(922)において、利用側ファン(925)によって送られてきた空調対象空間の空気を冷却する。これにより、空調対象空間の冷房が行われる。なお、熱源側熱交換器(913)では、熱源側ファン(916)によって送られてきた空気(例えば、室外空気)に対して高圧のガス冷媒から熱が伝えられる。
本実施形態の冷凍装置(900)は、例えば、凝縮温度(すなわち、外気温)が比較的高い状態で冷凍負荷を下げてターボ圧縮機(101,210,410,601,701,812)を運転する場合があり、ターボ圧縮機(101,210,410,601,701,812)がタービュランス領域(図7に符号Cで示す領域)で運転されることがある。そのような運転は、典型的には、ビルなどの多数の部屋を有する建物において、一部の部屋のみの空調(すなわち、一部の利用ユニット(921)のみの温度調整)が要求される場合に行われる。本実施形態では、実施形態1と同様に、タービュランス領域(C)でもターボ圧縮機(101,210,410,601,701,812)を問題なく運転することが可能である。これにより、ターボ圧縮機(101,210,410,601,701,812)を有する熱源ユニット(910)全体としての小型化や、冷凍装置(900)の低コスト化などを図ることができる。また、複数台の利用ユニット(921)を設け、複数の空調対象空間の空気調和を行う冷凍装置(900)において、一部の利用ユニット(921)のみを運転している状態であっても、ターボ圧縮機(101,210,410,601,701,812)を問題なく運転することができる。
なお、冷凍装置(900)は、空調設備用機器の他に、例えば、家庭用エアコンまたは業務用エアコンを構成していてもよい。冷凍装置(900)の用途としては、住宅、店舗、商業施設、または船舶といった各種建造物を例として挙げることができる。
《その他の実施形態》
上記各実施形態では、ターボ圧縮機(101,210,410,601,701,812)は、1つまたは2つのベアリングレスモータ(160,170,250,450,640,760,770,840,850)を備えているが、3つ以上のベアリングレスモータを備えていてもよい。
上記各実施形態では、ターボ圧縮機(101,210,410,601,701,812)は、1つまたは2つのベアリングレスモータ(160,170,250,450,640,760,770,840,850)を備えているが、3つ以上のベアリングレスモータを備えていてもよい。
また、上記各実施形態では、各ベアリングレスモータ(160,170,250,450,640,760,770,840,850)はコンセクエントポール型または埋込磁石型のベアリングレスモータであるが、各ベアリングレスモータ(160,170,250,450,640,760,770,840,850)の種類はこれらに限られるものではない。例えば、回転子の表面に永久磁石を貼り付けた表面磁石型(SPM:SurfacePermanent Magnet)、インセット型などのベアリングレスモータを挙げることができる。
また、上記各実施形態では、各ベアリングレスモータ(160,170,250,450,640,760,770,840,850)が駆動用コイル(166a~166c,176a~176c,256a~256c,456a~456c,646a~646c)および支持用コイル(167a~167c,177a~177c,257a~257c,457a~457c,647a~647c)を備えているが、両コイル(166a~166c,176a~176c,256a~256c,456a~456c,646a~646c, 167a~167c,177a~177c,257a~257c,457a~457c,647a~647c)の機能を併せ持つ共通のコイルを備えていてもよい。
また、上記各実施形態では、回転子(161,171,251,451,641,761,771,841,851)および固定子(164,174,254,454,644,762,772,844,854)は積層鋼板で構成されているが、積層鋼板以外の材料で回転子(161,171,251,451,641,761,771,841,851)および固定子(164,174,254,454,644,762,772,844,854)を構成してもよい。
また、上記各実施形態では、ターボ圧縮機(101,210,410,601,701,812)は1つだけのインペラ(120,221,421,603a,720,821)を備えているが、2つ以上のインペラ(120,221,421,603a,720,821)を備えていてもよい。例えば、駆動軸(130,240,440,605,730,831)の両端にインペラ(120,221,421,603a,720,821)が1つずつ取り付けられていてもよい。
また、以上の説明では、ベアリングレスモータ(160,170,250,450,640,760,770,840,850)の回転子(161,171,251,451,641,761,771,841,851)に設けられた複数の永久磁石(163,173,253,453,643,843,853)が互いに同形状となっている場合を例に挙げたが、これらの複数の永久磁石(163,173,253,453,643,843,853)は、互いに異なる形状となっていてもよい。
以上説明したように、本発明は、ターボ圧縮機について有用である。
101 ターボ圧縮機
120 インペラ
160 第1ベアリングレスモータ(駆動支持部)
161 回転子
164 固定子
166a~166c 駆動用コイル(コイル)
167a~167c 支持用コイル(コイル)
170 第2ベアリングレスモータ(駆動支持部)
171 回転子
174 固定子
176a~176c 駆動用コイル(コイル)
177a~177c 支持用コイル(コイル)
180 ラジアル磁気軸受(駆動支持部)
190 制御部
191 電源部
210 ターボ圧縮機
211 ケーシング
220 負荷
221 インペラ
230 電動機システム
240 駆動軸
241 円盤部
250 ベアリングレスモータ(駆動支持部)
251 回転子
254 固定子
260 ラジアル磁気軸受(磁気軸受、駆動支持部)
261 第1電磁石
262 第2電磁石
263 第3電磁石
264 第4電磁石
280 制御部
281 電源部
300 空気調和装置
310 冷媒回路
320 凝縮器
330 膨張弁
340 蒸発器
410 ターボ圧縮機
411 ケーシング
421 インペラ
430 電動機システム
440 駆動軸
441 円盤部
450 ベアリングレスモータ(駆動支持部)
451 回転子
454 固定子
460 ラジアル磁気軸受(磁気軸受、駆動支持部)
461 第1電磁石
462 第2電磁石
463 第3電磁石
464 第4電磁石
480 制御部
481 電源部
500 空気調和装置
510 冷媒回路
520 凝縮器
530 膨張弁
540 蒸発器
601 ターボ圧縮機
603 圧縮機構(負荷)
603a インペラ
605 駆動軸
610 電動機システム
621 ラジアル磁気軸受(磁気軸受、駆動支持部)
640 ベアリングレスモータ(駆動支持部)
671~678 電磁石
701 ターボ圧縮機
720 インペラ
730 駆動軸
760 第1ベアリングレスモータ(駆動支持部)
761 回転子
762 固定子
763 コイル
764 コイルエンド部
765 第1モールド樹脂(モールド樹脂)
770 第2ベアリングレスモータ(駆動支持部)
771 回転子
772 固定子
773 コイル
774 コイルエンド部
775 第2モールド樹脂(モールド樹脂)
780 第1動圧気体軸受、スリーブ(気体軸受、駆動支持部)
782 第2動圧気体軸受、スリーブ(気体軸受、駆動支持部)
784 第1静圧気体軸受、スリーブ(気体軸受、駆動支持部)
787 第2静圧気体軸受、スリーブ(気体軸受、駆動支持部)
811 冷媒回路
812 ターボ圧縮機
821 インペラ(負荷)
830 電動機システム
831 駆動軸
840 第1ベアリングレスモータ(駆動支持部)
841 回転子
844 固定子
846a~846c 電機子巻線
847a~847c 支持巻線
850 第2ベアリングレスモータ(駆動支持部)
851 回転子
854 固定子
856a~856c 電機子巻線
857a~857c 支持巻線
860 制御部
861 第1電源部(電源部)
862 第2電源部(電源部)
900 冷凍装置
910 熱源ユニット
921 利用ユニット
120 インペラ
160 第1ベアリングレスモータ(駆動支持部)
161 回転子
164 固定子
166a~166c 駆動用コイル(コイル)
167a~167c 支持用コイル(コイル)
170 第2ベアリングレスモータ(駆動支持部)
171 回転子
174 固定子
176a~176c 駆動用コイル(コイル)
177a~177c 支持用コイル(コイル)
180 ラジアル磁気軸受(駆動支持部)
190 制御部
191 電源部
210 ターボ圧縮機
211 ケーシング
220 負荷
221 インペラ
230 電動機システム
240 駆動軸
241 円盤部
250 ベアリングレスモータ(駆動支持部)
251 回転子
254 固定子
260 ラジアル磁気軸受(磁気軸受、駆動支持部)
261 第1電磁石
262 第2電磁石
263 第3電磁石
264 第4電磁石
280 制御部
281 電源部
300 空気調和装置
310 冷媒回路
320 凝縮器
330 膨張弁
340 蒸発器
410 ターボ圧縮機
411 ケーシング
421 インペラ
430 電動機システム
440 駆動軸
441 円盤部
450 ベアリングレスモータ(駆動支持部)
451 回転子
454 固定子
460 ラジアル磁気軸受(磁気軸受、駆動支持部)
461 第1電磁石
462 第2電磁石
463 第3電磁石
464 第4電磁石
480 制御部
481 電源部
500 空気調和装置
510 冷媒回路
520 凝縮器
530 膨張弁
540 蒸発器
601 ターボ圧縮機
603 圧縮機構(負荷)
603a インペラ
605 駆動軸
610 電動機システム
621 ラジアル磁気軸受(磁気軸受、駆動支持部)
640 ベアリングレスモータ(駆動支持部)
671~678 電磁石
701 ターボ圧縮機
720 インペラ
730 駆動軸
760 第1ベアリングレスモータ(駆動支持部)
761 回転子
762 固定子
763 コイル
764 コイルエンド部
765 第1モールド樹脂(モールド樹脂)
770 第2ベアリングレスモータ(駆動支持部)
771 回転子
772 固定子
773 コイル
774 コイルエンド部
775 第2モールド樹脂(モールド樹脂)
780 第1動圧気体軸受、スリーブ(気体軸受、駆動支持部)
782 第2動圧気体軸受、スリーブ(気体軸受、駆動支持部)
784 第1静圧気体軸受、スリーブ(気体軸受、駆動支持部)
787 第2静圧気体軸受、スリーブ(気体軸受、駆動支持部)
811 冷媒回路
812 ターボ圧縮機
821 インペラ(負荷)
830 電動機システム
831 駆動軸
840 第1ベアリングレスモータ(駆動支持部)
841 回転子
844 固定子
846a~846c 電機子巻線
847a~847c 支持巻線
850 第2ベアリングレスモータ(駆動支持部)
851 回転子
854 固定子
856a~856c 電機子巻線
857a~857c 支持巻線
860 制御部
861 第1電源部(電源部)
862 第2電源部(電源部)
900 冷凍装置
910 熱源ユニット
921 利用ユニット
Claims (37)
- 冷凍サイクルを行う冷媒回路に設けられて冷媒を圧縮するターボ圧縮機(101,210,410,601,701,812)であって、
インペラ(120,221,421,603a,720,821)と、
駆動軸(130,240,440,605,730,831)と、
所定の電流範囲内の電流が流れることによって生じる電磁力により上記駆動軸(130,240,440,605,730,831)を回転駆動しかつ上記駆動軸(130,240,440,605,730,831)のラジアル荷重を非接触で支持する駆動支持部(160,170,180,250,260,450,460,621,640,760,770,780,782,840,850)とを備え、
上記駆動支持部(160,170,180,250,260,450,460,621,640,760,770,780,782,840,850)は、一対の回転子(161,171,251,451,641,761,771,841,851)と固定子(164,174,254,454,644,762,772,844,854)を有して上記駆動軸(130,240,440,605,730,831)を回転駆動しかつ上記駆動軸(130,240,440,605,730,831)のラジアル荷重を非接触で支持するベアリングレスモータ(160,170,250,450,640,760,770,840,850)を少なくとも1つ有する
ことを特徴とするターボ圧縮機。 - 請求項1において、
上記インペラ(120)および上記駆動軸(130)を回転駆動するために上記駆動支持部(160,170,180)で生じる磁束を駆動用磁束BMとし、
上記駆動軸(130)のラジアル荷重を支持するために上記駆動支持部(160,170,180)で生じる磁束を支持用磁束BSとして、
上記駆動支持部(160,170,180)に電流を流すための電源部(191)と、
上記ターボ圧縮機(101)を旋回失速が生じる領域およびサージング領域で運転する際には、同一回転速度で比較したとき、通常運転時に比べて、上記駆動用磁束BMを発生させるための電流IMに対する上記支持用磁束BSを発生させるための電流ISの割合を増加させるように上記電源部(191)を制御する制御部(190)とを備えている
ことを特徴とするターボ圧縮機。 - 請求項1において、
上記インペラ(120)および上記駆動軸(130)を回転駆動するために上記駆動支持部(160,170,180)で生じる磁束を駆動用磁束BMとし、
上記駆動軸(130)のラジアル荷重を支持するために上記駆動支持部(160,170,180)で生じる磁束を支持用磁束BSとして、
上記駆動支持部(160,170,180)に電流を流すための電源部(191)と、
上記ターボ圧縮機(101)を旋回失速が生じる領域およびサージング領域で運転する場合に冷媒体積流量が減るにつれて、同一回転速度で比較したとき、上記駆動用磁束BMを発生させるための電流IMに対する上記支持用磁束BSを発生させるための電流ISの割合を増加させていくように上記電源部(191)を制御する制御部(190)とを備えている
ことを特徴とするターボ圧縮機。 - 請求項1において、
上記インペラ(120)および上記駆動軸(130)を回転駆動するために上記駆動支持部(160,170,180)で生じる磁束を駆動用磁束BMとし、
上記駆動軸(130)のラジアル荷重を支持するために上記駆動支持部(160,170,180)で生じる磁束を支持用磁束BSとし、
上記ターボ圧縮機(101)の所定の運転領域における上記駆動用磁束BMと上記支持用磁束BSとの和の最大値を(BM+BS)maxとし、
上記所定の運転領域における最大トルク負荷に対応する駆動トルクを発生させるために上記駆動支持部(160,170,180)で生じる磁束をBMmaxとし、
上記所定の運転領域における上記駆動軸(130)の最大ラジアル荷重を支持するために上記駆動支持部(160,170,180)で生じる磁束をBSmaxとし、
上記駆動支持部(160,170,180)に流れる電流が上記所定の電流範囲の上限値であるときに該駆動支持部(160,170,180)で生じる磁束をBmaxとしたときに、
上記駆動支持部(160,170,180)は、(BM+BS)max≦Bmax<BMmax+BSmaxの関係が成り立つように構成されている
ことを特徴とするターボ圧縮機。 - 請求項1において、
上記駆動支持部(160,170,180)は、上記所定の電流範囲内の電流が流れるコイル(166a~166c,167a~167c,176a~176c,177a~177c,184)を有し、
上記インペラ(120)および上記駆動軸(130)を回転駆動するために上記駆動支持部(160,170,180)で生じる磁束を駆動用磁束BMとし、
上記駆動軸(130)のラジアル荷重を支持するために上記駆動支持部(160,170,180)で生じる磁束を支持用磁束BSとし、
上記ターボ圧縮機(101)の所定の運転領域に最大トルク負荷に対応する駆動トルクを発生させるときに上記駆動支持部(160,170,180)で生じる磁束をBMmaxとし、かつそのときに上記コイル(166a~166c,167a~167c,176a~176c,177a~177c,184)に流れる電流を最大トルク電流IBMmaxとし、
上記所定の運転領域における上記駆動軸(130)の最大ラジアル荷重を支持するときに上記駆動支持部(160,170,180)で生じる磁束をBSmaxとし、かつそのときに上記コイル(166a~166c,167a~167c,176a~176c,177a~177c,184)に流れる電流を最大支持力電流IBSmaxとし、
上記最大トルク電流IBMmaxと上記最大支持力電流IBSmaxとを足し合わせた電流を上記コイル(166a~166c,167a~167c,176a~176c,177a~177c,184)に流すことによって上記駆動支持部(160,170,180)で生じる磁束をBMSmaxとしたときに、
上記駆動支持部(160,170,180)は、BMSmax<BMmax+BSmaxの関係が成り立つように構成されている
ことを特徴とするターボ圧縮機。 - 請求項1において、
上記駆動支持部(160,170,180)に電流を流すための電源部(191)と、
サージング領域で運転する場合または上記駆動軸(130)の回転運動を通常停止させる場合に、上記駆動支持部(160,170,180)に駆動トルクに寄与する電流を流さずに上記駆動軸(130)のラジアル荷重を非接触で支持するための電流のみを流すように上記電源部(191)を制御する制御部(190)とを備えている
ことを特徴とするターボ圧縮機。 - 請求項1~6のいずれか1項において、
上記駆動支持部(160,170,180)は、上記ベアリングレスモータ(160,170)のみで構成されている
ことを特徴とするターボ圧縮機。 - 請求項1~6のいずれか1項において、
上記駆動支持部(160,170,180)は、上記ベアリングレスモータ(160,170)と、上記駆動軸(130)の軸方向において上記ベアリングレスモータ(160,170)と並んで配置され、複数の電磁石を有して上記駆動軸(130)のラジアル荷重を非接触で支持する磁気軸受(180)とで構成されている
ことを特徴とするターボ圧縮機。 - 請求項8において、
上記磁気軸受(260)は、上記駆動軸(240)の軸方向において、上記ベアリングレスモータ(250)において支持されるラジアル荷重よりも大きいラジアル荷重が作用する位置に配置されている
ことを特徴とするターボ圧縮機。 - 請求項9において、
上記駆動軸(240)の一端部に上記インペラ(220)が接続され、
上記磁気軸受(260)は、上記駆動軸(240)の軸方向において上記ベアリングレスモータ(250)よりも上記インペラ(220)に近い位置に配置されている
ことを特徴とするターボ圧縮機。 - 請求項9または10において、
上記ベアリングレスモータ(250)は、表面磁石型のベアリングレスモータによって構成されている
ことを特徴とするターボ圧縮機。 - 請求項8において、
上記ベアリングレスモータ(450)は、上記駆動軸(440)の軸方向において、上記磁気軸受(460)において支持されるラジアル荷重よりも大きいラジアル荷重が作用する位置に配置されている
ことを特徴とするターボ圧縮機。 - 請求項12において、
上記駆動軸(440)の一端部に上記インペラ(421)が接続され、
上記ベアリングレスモータ(450)は、上記駆動軸(440)の軸方向において上記磁気軸受(460)よりも上記インペラ(421)に近い位置に配置されている
ことを特徴とするターボ圧縮機。 - 請求項12または13において、
上記ベアリングレスモータ(450)は、コンセクエントポール型のベアリングレスモータまたは埋込磁石型のベアリングレスモータによって構成されている
ことを特徴とするターボ圧縮機。 - 請求項8において、
上記磁気軸受(621)は、上記ベアリングレスモータ(640)の軸方向両側にそれぞれ配置され、かつ上記複数の電磁石(671~678)によって上記駆動軸(605)に合成電磁力(F)を付与するように構成されており、
それぞれの磁気軸受(621)は、互いに逆位相の合成電磁力(F)を発生させる
ことを特徴とするターボ圧縮機。 - 請求項15において、
一方の磁気軸受(621)のそれぞれの電磁石(671~678)は、当該電磁石(671~678)とは逆位相の電磁力を他方の磁気軸受(621)において発生させる電磁石(671~678)と結線されている
ことを特徴とするターボ圧縮機。 - 請求項15または16において、
上記ベアリングレスモータ(640)で並進方向の変位を制御し、上記磁気軸受(621)でチルト方向の変位を制御する
ことを特徴とするターボ圧縮機。 - 請求項17において、
上記ベアリングレスモータ(640)用の制御器と、上記磁気軸受(621)用の制御器を個別に有する
ことを特徴とするターボ圧縮機。 - 請求項15~18のいずれか1項において、
上記インペラ(603a)により近い磁気軸受(621)の方が、もう一方の磁気軸受(621)よりも大きな上記合成電磁力(F)を発生するように、各電磁石(671~678)の巻線の巻数、各巻線に流す電流の大きさ、磁気回路の磁気抵抗、電磁石のサイズが設定されている
ことを特徴とするターボ圧縮機。 - 請求項19において、
上記インペラ(603a)により近い方の磁気軸受(621)が有する各電磁石(671~678)の方が、もう一方の磁気軸受(621)が有する各電磁石(671~678)よりも巻線の巻数が多い
ことを特徴とするターボ圧縮機。 - 請求項19または20において、
上記インペラ(603a)により近い磁気軸受(621)の方が、もう一方の磁気軸受(621)よりも、軸方向長さが長い
ことを特徴とするターボ圧縮機。 - 請求項19~21のいずれか1項において、
上記駆動軸(605)は、上記インペラ(603a)により近い方の磁気軸受(621)に面する部分の方が、もう一方の磁気軸受(621)に面する部分よりも直径が大きい
ことを特徴とするターボ圧縮機。 - 請求項1~22のいずれか1項において、
上記駆動支持部(760,770,780,782,784,787)は、上記ベアリングレスモータ(760,770)に組み込まれて上記駆動軸(730)のラジアル荷重を非接触で支持する気体軸受(780,782,784,787)を有する
ことを特徴とするターボ圧縮機。 - 請求項23において、
上記ベアリングレスモータ(760,770)は、上記所定の電流範囲内の電流が流れるコイル(763,773)が巻回された固定子(762,772)を有し、
上記気体軸受(780,782,784,787)の少なくとも一部は、上記固定子(762,772)のコイルエンド部(764,774)と上記駆動軸(730)の径方向に重なっている
ことを特徴とするターボ圧縮機。 - 請求項24において、
上記気体軸受(780,782,784,787)は、上記コイルエンド部(764,774)のモールド樹脂(765,775)に嵌め込まれたスリーブ(780,782,784,787)によって構成されている
ことを特徴とするターボ圧縮機。 - 請求項23~25のいずれか1項において、
上記気体軸受(780,782)は、動圧気体軸受である
ことを特徴とするターボ圧縮機。 - 請求項23~25のいずれか1項において、
上記気体軸受(784,787)は、静圧気体軸受である
ことを特徴とするターボ圧縮機。 - 請求項1~27のいずれか1項において、
ベアリングレスモータ(840,850)の上記固定子(844,854)に設けられた電機子巻線(846a~846c,856a~856c)および支持巻線(847a~847c,857a~857c)と、
上記電機子巻線(846a~846c,856a~856c)および上記支持巻線(847a~847c,857a~857c)に電圧を印加するための電源部(861,862)と、
上記電機子巻線(846a~846c,856a~856c)にかかる電圧である電機子電圧VAと、上記支持巻線(847a~847c,857a~857c)に流れる電流である支持電流ISとの一方を増大させかつ他方を低減させるように、上記電源部(861,862)を制御する制御部(860)とを備える
ことを特徴とするターボ圧縮機。 - 請求項28において、
上記制御部(860)は、上記電機子電圧VAを増大させて上記支持電流ISが低減するように、または、上記支持電流ISを増大させて上記電機子電圧VAが低減するように、上記電源部(861,862)を制御する
ことを特徴とするターボ圧縮機。 - 請求項28または29において、
上記制御部(860)は、上記電機子電圧VAを増大させて上記支持電流ISが所定の第1上限値を超えないように、上記電源部(861,862)を制御する
ことを特徴とするターボ圧縮機。 - 請求項28~30のいずれか1項において、
上記制御部(860)は、上記支持電流ISを増大させて上記電機子電圧VAが所定の第2上限値を超えないように、上記電源部(861,862)を制御する
ことを特徴とするターボ圧縮機。 - 請求項28~31のいずれか1項において、
上記制御部(860)は、上記電機子電圧VAを低減させて上記支持電流ISが増大するように、または、上記支持電流ISを低減させて上記電機子電圧VAが増大するように、上記電源部(861,862)を制御する
ことを特徴とするターボ圧縮機。 - 請求項28~32のいずれか1項において、
上記制御部(860)は、上記電機子電圧VAを低減させて上記支持電流ISが所定の第1下限値を超えるように、上記電源部(861,862)を制御する
ことを特徴とするターボ圧縮機。 - 請求項28~33のいずれか1項において、
上記制御部(860)は、上記支持電流ISを低減させて上記電機子電圧VAが所定の第2下限値を超えるように、上記電源部(861,862)を制御する
ことを特徴とするターボ圧縮機。 - 請求項28~34のいずれか1項において、
上記ターボ圧縮機(812)は、冷凍サイクルを行う冷媒回路(811)に設けられて上記インペラ(821)によって冷媒を圧縮するように構成され、
上記ターボ圧縮機(812)を旋回失速が生じる領域またはサージング領域で運転する場合、上記制御部(860)は、上記電機子電圧VAを増大させて上記支持電流ISが所定の第1上限値を超えないように、上記電源部(861,862)を制御する
ことを特徴とするターボ圧縮機。 - 請求項1~35のいずれか1項に記載のターボ圧縮機(101,210,410,601,701,812)を有する熱源ユニット(910)と、
利用ユニット(921)とを備える
ことを特徴とする冷凍装置。 - 請求項36において、
上記利用ユニット(921)は、複数台設けられ、
複数台の上記利用ユニット(921)は、複数の空調対象空間の空気調和を行う
ことを特徴とする冷凍装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP18798224.4A EP3579390B1 (en) | 2017-05-09 | 2018-05-08 | Turbo compressor |
| US16/608,709 US11971045B2 (en) | 2017-05-09 | 2018-05-08 | Turbo compressor |
| CN201880027974.5A CN110574260B (zh) | 2017-05-09 | 2018-05-08 | 涡轮压缩机 |
Applications Claiming Priority (8)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017093339 | 2017-05-09 | ||
| JP2017-093339 | 2017-05-09 | ||
| JP2017093328 | 2017-05-09 | ||
| JP2017093329 | 2017-05-09 | ||
| JP2017093338 | 2017-05-09 | ||
| JP2017-093338 | 2017-05-09 | ||
| JP2017-093329 | 2017-05-09 | ||
| JP2017-093328 | 2017-05-09 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2018207767A1 true WO2018207767A1 (ja) | 2018-11-15 |
Family
ID=64104747
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2018/017747 WO2018207767A1 (ja) | 2017-05-09 | 2018-05-08 | ターボ圧縮機 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US11971045B2 (ja) |
| EP (1) | EP3579390B1 (ja) |
| JP (2) | JP6489268B2 (ja) |
| CN (1) | CN110574260B (ja) |
| WO (1) | WO2018207767A1 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020108990A1 (de) * | 2018-11-27 | 2020-06-04 | Voith Patent Gmbh | Turboverdichter |
| EP3670917A1 (en) * | 2018-12-17 | 2020-06-24 | Trane International Inc. | Systems and methods for controlling compressor motors |
| CN113446238A (zh) * | 2020-03-27 | 2021-09-28 | Lg电子株式会社 | 用于压缩机的方法和设备 |
Families Citing this family (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6620862B2 (ja) * | 2018-05-08 | 2019-12-18 | ダイキン工業株式会社 | 電動機システムおよびそれを備えたターボ圧縮機 |
| JP7299477B2 (ja) | 2019-03-27 | 2023-06-28 | ダイキン工業株式会社 | 電動機システム |
| JP6838616B2 (ja) * | 2019-03-28 | 2021-03-03 | ダイキン工業株式会社 | スラスト磁気軸受およびそれを備えたターボ圧縮機 |
| JP2021035307A (ja) * | 2019-08-29 | 2021-03-01 | トヨタ自動車株式会社 | モータの制御装置 |
| US11368116B2 (en) * | 2020-07-27 | 2022-06-21 | Massachusetts Institute Of Technology | Dipole inferior permanent magnet slice rotors |
| JP7029096B1 (ja) * | 2020-11-20 | 2022-03-03 | ダイキン工業株式会社 | 電力供給回路及びそれを備えた軸受装置 |
| US20220243966A1 (en) * | 2021-02-04 | 2022-08-04 | Danfoss A/S | Refrigerant compressor with impeller having dual splitter blade arrangement |
| DE202021101195U1 (de) | 2021-03-10 | 2021-05-27 | 3W Turbo Gmbh | Gasgelagerte Mikro-Turbomaschine |
| DE102021105732A1 (de) | 2021-03-10 | 2022-09-15 | 3W Turbo Gmbh | Gasgelagerte Mikro-Turbomaschine |
| JP7185152B2 (ja) * | 2021-03-19 | 2022-12-07 | ダイキン工業株式会社 | ステータコアの固定構造、遠心式圧縮機、及び固定方法 |
| JP7108218B1 (ja) * | 2021-03-31 | 2022-07-28 | ダイキン工業株式会社 | 電動機、圧縮機、及び冷凍装置 |
| EP4152592A1 (en) * | 2021-09-20 | 2023-03-22 | Vestel Elektronik Sanayi ve Ticaret A.S. | Device and method for controlling a motor, especially of a washing machine |
| US11852150B2 (en) * | 2021-12-30 | 2023-12-26 | Trane International Inc. | Gas bearing management for a compressor |
| JP7141010B1 (ja) * | 2022-03-31 | 2022-09-22 | ダイキン工業株式会社 | 駆動システム、ターボ圧縮機、冷凍装置 |
| DE102022116933A1 (de) | 2022-07-07 | 2024-01-18 | Zf Cv Systems Global Gmbh | Verdichter für ein Brennstoffzellensystem, und Brennstoffzellensystem mit selbigem |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11513558A (ja) * | 1995-10-06 | 1999-11-16 | ズルツァー ターボ アクチェンゲゼルシャフト | 流体を送出する回転機械 |
| JP2014005833A (ja) * | 2012-06-22 | 2014-01-16 | Eskaef Manutic Mechatronic | 車輌用遠心式電動コンプレッサ |
| JP2014007951A (ja) * | 2012-06-22 | 2014-01-16 | Eskaef Manutic Mechatronic | コンパクト電動遠心コンプレッサー |
| JP2014241725A (ja) | 2010-03-15 | 2014-12-25 | 学校法人東京理科大学 | ベアリングレスモータ |
| JP2016114114A (ja) | 2014-12-12 | 2016-06-23 | ダイキン工業株式会社 | スラスト磁気軸受 |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2586070B1 (fr) * | 1985-08-12 | 1987-12-18 | Europ Propulsion | Palier magnetique radial de grand diametre |
| US6559567B2 (en) * | 2000-05-12 | 2003-05-06 | Levitronix Llc | Electromagnetic rotary drive |
| DE10032913C2 (de) * | 2000-07-06 | 2002-11-07 | Draeger Medical Ag | Gasfördereinheit für ein Beatmungssystem |
| US6727618B1 (en) * | 2002-06-10 | 2004-04-27 | The United States Of America, As Represented By The Administrator Of National Aeronautics And Space Administration | Bearingless switched reluctance motor |
| JP4727142B2 (ja) * | 2003-12-18 | 2011-07-20 | 三菱重工業株式会社 | ターボ冷凍機およびその圧縮機ならびにその制御方法 |
| US7456537B1 (en) * | 2004-12-17 | 2008-11-25 | The University Of Toledo | Control system for bearingless motor-generator |
| JP2007092646A (ja) * | 2005-09-29 | 2007-04-12 | Jtekt Corp | 燃料電池用過給機 |
| GB0716329D0 (en) * | 2007-08-21 | 2007-10-03 | Compair Uk Ltd | Improvements in compressors control |
| KR101020994B1 (ko) * | 2009-05-28 | 2011-03-09 | 경성대학교 산학협력단 | 하이브리드 극 구조의 베어링리스 스위치드 릴럭턴스 모터 |
| WO2013039492A1 (en) * | 2011-09-14 | 2013-03-21 | Danfoss Turbocor Compressors B.V. | Centrifugal compressor diffuser control |
| JP5871157B2 (ja) * | 2011-10-03 | 2016-03-01 | 株式会社Ihi | 遠心圧縮設備のサージング防止方法 |
| JP6155573B2 (ja) * | 2012-08-28 | 2017-07-05 | 株式会社Ihi | 遠心圧縮機 |
| JP5700033B2 (ja) * | 2012-09-12 | 2015-04-15 | ダイキン工業株式会社 | 磁気軸受 |
| EP2749780A1 (en) * | 2012-12-26 | 2014-07-02 | Skf Magnetic Mechatronics | Hybrid magnetic suspension of a rotor |
| DE102016004714A1 (de) * | 2016-04-19 | 2017-10-19 | Saurer Germany Gmbh & Co. Kg | Spinnrotorschaft, Lageranordnung zum aktiven magnetischen Lagern eines solchen Spinnrotorschafts und Spinnrotorantriebseinrichtung |
| JP6672056B2 (ja) * | 2016-04-22 | 2020-03-25 | 三菱重工サーマルシステムズ株式会社 | ターボ圧縮機、これを備えたターボ冷凍装置 |
| CN105846624A (zh) * | 2016-05-16 | 2016-08-10 | 江苏大学 | 一种双定子无轴承磁通切换永磁电机 |
-
2018
- 2018-05-08 EP EP18798224.4A patent/EP3579390B1/en active Active
- 2018-05-08 CN CN201880027974.5A patent/CN110574260B/zh active Active
- 2018-05-08 JP JP2018089646A patent/JP6489268B2/ja active Active
- 2018-05-08 WO PCT/JP2018/017747 patent/WO2018207767A1/ja unknown
- 2018-05-08 US US16/608,709 patent/US11971045B2/en active Active
- 2018-10-22 JP JP2018198064A patent/JP2019049266A/ja active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11513558A (ja) * | 1995-10-06 | 1999-11-16 | ズルツァー ターボ アクチェンゲゼルシャフト | 流体を送出する回転機械 |
| JP2014241725A (ja) | 2010-03-15 | 2014-12-25 | 学校法人東京理科大学 | ベアリングレスモータ |
| JP2014005833A (ja) * | 2012-06-22 | 2014-01-16 | Eskaef Manutic Mechatronic | 車輌用遠心式電動コンプレッサ |
| JP2014007951A (ja) * | 2012-06-22 | 2014-01-16 | Eskaef Manutic Mechatronic | コンパクト電動遠心コンプレッサー |
| JP2016114114A (ja) | 2014-12-12 | 2016-06-23 | ダイキン工業株式会社 | スラスト磁気軸受 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP3579390A4 |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020108990A1 (de) * | 2018-11-27 | 2020-06-04 | Voith Patent Gmbh | Turboverdichter |
| EP3670917A1 (en) * | 2018-12-17 | 2020-06-24 | Trane International Inc. | Systems and methods for controlling compressor motors |
| US11530856B2 (en) | 2018-12-17 | 2022-12-20 | Trane International Inc. | Systems and methods for controlling compressor motors |
| CN113446238A (zh) * | 2020-03-27 | 2021-09-28 | Lg电子株式会社 | 用于压缩机的方法和设备 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2019049266A (ja) | 2019-03-28 |
| EP3579390A1 (en) | 2019-12-11 |
| EP3579390A4 (en) | 2020-12-02 |
| JP2018189358A (ja) | 2018-11-29 |
| US20210115929A1 (en) | 2021-04-22 |
| EP3579390B1 (en) | 2024-08-28 |
| JP6489268B2 (ja) | 2019-03-27 |
| CN110574260A (zh) | 2019-12-13 |
| CN110574260B (zh) | 2021-10-15 |
| US11971045B2 (en) | 2024-04-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6489268B2 (ja) | ターボ圧縮機 | |
| JP4616405B2 (ja) | ベアリングレスモータ | |
| US20100033046A1 (en) | Rotating electric machine | |
| JP3879414B2 (ja) | 空気調和機 | |
| US11300131B2 (en) | Electric motor system and turbo compressor provided therewith | |
| KR20000070440A (ko) | 개선된 고속 전기 모터 | |
| US11005349B2 (en) | Electric motor system, and turbo compressor provided with same | |
| EP3605833B1 (en) | Load operation control system | |
| JP2021090256A (ja) | 電動機システムおよびそれを備えたターボ圧縮機 | |
| WO2022202543A1 (ja) | 電動機システム、ターボ圧縮機、及び冷凍装置 | |
| CN112088487B (zh) | 电动机系统及包括该电动机系统的涡轮压缩机 | |
| JP6665962B1 (ja) | ターボ圧縮機 | |
| JP2015220773A (ja) | ベアリングレスモータ | |
| JP2007166798A (ja) | 回転電機、圧縮機、送風機、及び空気調和機 | |
| JP2011097773A (ja) | 永久磁石モータおよびエアコンディショナ | |
| JP2007068323A (ja) | Dcブラシレスモータ装置及びその永久磁石 | |
| JP2020162349A (ja) | 電動機システム | |
| JP7108218B1 (ja) | 電動機、圧縮機、及び冷凍装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 18798224 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2018798224 Country of ref document: EP Effective date: 20190903 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |