WO2018173745A1 - Dispositif mobile - Google Patents
Dispositif mobile Download PDFInfo
- Publication number
- WO2018173745A1 WO2018173745A1 PCT/JP2018/008675 JP2018008675W WO2018173745A1 WO 2018173745 A1 WO2018173745 A1 WO 2018173745A1 JP 2018008675 W JP2018008675 W JP 2018008675W WO 2018173745 A1 WO2018173745 A1 WO 2018173745A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- actuator element
- energy
- actuator
- driven body
- movable device
- Prior art date
Links
Images



Definitions
- the disclosure in this specification relates to a movable device that utilizes deformation of an actuator element.
- Patent Document 1 discloses a movable device that utilizes deformation of an actuator element.
- the deformation of the member is directly or indirectly used to mechanically move the driven body.
- an actuator element is an elongated synthetic fiber.
- the prior art does not fully disclose parts or devices for increasing or decreasing the energy of the actuator element. It is desirable that the energy transfer component for increasing or decreasing the energy of the actuator element provides energy transfer over a wide range of actuator elements.
- the stability of electrical connection may be impaired due to deformation of the actuator element.
- deformation of the actuator element may break the electrical connection.
- One disclosed object is to provide a movable device capable of transmitting energy over a wide range of actuator elements.
- Another object disclosed is to provide a mobile device having a stable electrical connection.
- the movable device disclosed herein includes an actuator element that is deformed by an increase or decrease in energy, and a driven body connected to the actuator element.
- the actuator element includes a material wire that causes deformation, and an energy transmission component that increases or decreases the energy of the material wire, and is arranged in a reciprocating manner along the actuator axis of the actuator element.
- the energy transmission component is arranged in a reciprocating manner along the actuator axis.
- the reciprocating energy transmission component can realize energy transmission with the material wire over a wide range along the actuator axis.
- the energy of the material wire can be increased or decreased in a wide range along the actuator axis.
- the reciprocating energy transfer component makes it possible to concentrate the connection for the energy transfer component with respect to the direction along the actuator axis. For this reason, an energy transmission component can be arrange
- FIG. 6 is a side view illustrating an energy transfer component of at least one embodiment.
- FIG. 6 is a side view illustrating an energy transfer component of at least one embodiment.
- FIG. 6 is a side view illustrating an energy transfer component of at least one embodiment.
- FIG. 6 is a side view illustrating an energy transfer component of at least one embodiment.
- FIG. 6 is a side view illustrating an energy transfer component of at least one embodiment.
- It is a perspective view of the movable device concerning at least one embodiment.
- FIG. 6 is a side view illustrating an energy transfer component of at least one embodiment.
- FIG. 6 is a side view illustrating an energy transfer component of at least one embodiment.
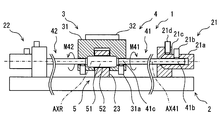
- the movable device 1 includes a fixed base 2 and a movable portion 3 that can move mechanically with respect to the base 2.
- the movable part 3 can rotate around a rotation axis AXR extending along the height direction HD.
- the movable part 3 reciprocates a predetermined angular range RG around the rotation axis AXR.
- the movable part 3 has a driven body 31.
- the movement of the movable part 3 is also called rocking.
- the moving direction of the movable part 3 is not restricted to rotation.
- the moving direction of the movable part 3 can be adapted to various movements such as a parallel movement along the height direction HD, a parallel movement along the width direction WD, and a rotational movement around the depth direction DD.
- the movable device 1 has an element 32 mounted on the driven body 31.
- the element 32 provides an electrically active action or an electrically passive action.
- the element 32 is, for example, an electrical light source, an electrical blower, an electrical heat source, an electrical radio wave source, or an electrical magnetic source.
- the element 32 is, for example, an electrical sensor element.
- the movable device 1 may include a connection member that electrically connects the base 2 and the element 32 for electrical connection.
- the element 32 has an axis VR32 for the main function. For example, when the element 32 is a light source, the axis VR32 corresponds to the optical axis. For example, when the element 32 is a sensor, the axis VR32 corresponds to a detection axis.
- the shaft VR32 is swung by the rotation of the driven body 31.
- the axis VR32 is swung within the range of the rotation angle VRS.
- the movable device 1 is also a sensor device.
- the element 32 is a sensor element.
- the element 32 has an axis VR32 indicating a detection direction and a detection range.
- the element 32 detects a physical quantity in the direction of the axis VR32.
- the element 32 is provided by various elements such as an image sensor, an infrared sensor, an ultrasonic sensor, a radar antenna, an electromagnetic wave sensor, and a radiation sensor.
- the element 32 is an infrared sensor installed indoors.
- the detection signal of the element 32 is supplied to a device using infrared information by wire or wireless. Infrared information is supplied and used, for example, to an air conditioner.
- the movable device 1 is installed in a room such as a residence, an office, a vehicle, a ship, and an aircraft, and is used to collect information related to people in the room.
- the base 2 is placed in these rooms.
- the movable device 1 is moved so as to swing the axis VR32.
- the movable device 1 provides a sensor device that moves the axis VR32.
- the movement of the axis VR32 makes it possible to provide various sensor devices such as a directivity direction variable type, a tracking type, or a scanning type.
- a scanning sensor device is provided.
- the axis VR32 rotates about the rotation axis AXR.
- the axis VR32 is movable within a range of a predetermined rotation angle VRS along a plane extending in the width direction WD and the depth direction DD.
- the rotation angle VRS is the scanning range.
- the movable device 1 includes an actuator mechanism 4.
- the actuator mechanism 4 provides a rotational force for rotating the movable part 3.
- the actuator mechanism 4 is also a power source.
- the actuator mechanism 4 provides a rotational force so as to reciprocate.
- the actuator mechanism 4 has two actuator elements 41 and 42.
- the two actuator elements 41 and 42 are arranged on an extension line of the rotation axis AXR.
- the two actuator elements 41 and 42 are arranged on both sides of the driven body 31.
- the driven body 31 and the two actuator elements 41 and 42 are arranged in series. In the figure, the actuator elements 41 and 42 are illustrated with a little emphasis.
- the first actuator element 41 is connected to the driven body 31 and the fixed portion 21.
- the first actuator element 41 extends along the actuator axis AX41.
- the actuator axis AX41 is also the central axis of the first actuator element 41.
- the actuator shaft AX41 is located on the extension of the rotation shaft AXR.
- the actuator shaft AX41 and the rotation shaft AXR are coaxial.
- the second actuator element 42 is connected to the driven body 31 and the fixed portion 22.
- the second actuator element 42 extends along the actuator axis AX42.
- the actuator axis AX42 is also the central axis of the second actuator element 42.
- the actuator shaft AX42 is located on the extension of the rotation shaft AXR.
- the actuator shaft AX42 and the rotation shaft AXR are coaxial.
- the driven body 31 is disposed at the center of the base 2.
- the fixing portion 21 is provided at one end of the base 2.
- the fixing part 21 is fixed to the base 2.
- the fixing part 22 is provided at the other end of the base 2.
- the fixing part 22 is fixed to the base 2.
- the base 2 is made of a material that can maintain the shape of the movable device 1 against the force generated by the actuator mechanism 4.
- the base 2 is made of metal or resin. Part or the whole of the base 2 may be provided by a printed wiring board.
- the first actuator element 41 and the second actuator element 42 are arranged symmetrically with respect to the driven body 31.
- the first actuator element 41 and the second actuator element 42 have a symmetrical structure.
- the first actuator element 41 will be described. This description can be referred to as a description of the second actuator element 42.
- the first actuator element 41 has a fixed end 41 b that can be connected to the fixed portion 21.
- the fixed end 41b is connected to the fixed portion 21 when at least the first actuator element 41 outputs rotational power.
- the first actuator element 41 has an output end 41 c that can be connected to the driven body 31.
- the output end 41c is connected to the driven body 31 when at least the first actuator element 41 outputs rotational power.
- the driven body 31 is connected to the actuator element 41 on the actuator shaft AX41.
- the names of the fixed end 41b and the output end 41c are for convenience. In the following description, the fixed end 41b and the output end 41c may be simply referred to as ends.
- the first actuator element 41 has a rod shape.
- the first actuator element 41 has a shape that can be called an elongated rod shape or a fiber shape.
- the first actuator element 41 can be formed in a columnar shape or a cylindrical shape.
- the movable device 1 has a guide mechanism 5 for guiding the movement of the movable part 3.
- the guide mechanism 5 is provided between the support portion 23 provided on the base 2 and the driven body 31.
- the support part 23 is fixed to the base 2.
- the guide mechanism 5 allows the rotational movement of the driven body 31 around the height direction HD.
- the guide mechanism 5 suppresses the rotational motion around the depth direction DD and the rotational motion around the width direction WD.
- the guide mechanism 5 suppresses the vertical movement in the depth direction DD and the horizontal movement in the width direction WD of the movement of the driven body 31.
- the guide mechanism 5 may suppress the back-and-forth movement in the height direction HD.
- the guide mechanism 5 may allow back-and-forth movement in the height direction HD.
- the height direction HD can be defined as the roll axis, the width direction WD as the pitching axis, and the depth direction DD as the yaw axis.
- the guide mechanism 5 allows the driven body 31 to roll.
- the guide mechanism 5 may suppress excessive roll movement exceeding the available range. For example, a direct collision between the driven body 31 and the support portion 23 or an indirect collision via an elastic member limits the roll motion range.
- the guide mechanism 5 suppresses yawing motion and pitching motion of the driven body 31. Further, the guide mechanism 5 suppresses the vertical and horizontal movements of the driven body 31.
- the guide mechanism 5 may suppress the back-and-forth movement of the driven body 31.
- the guide mechanism 5 may allow the back-and-forth movement of the driven body 31 in some cases.
- the movable device 1 includes a control system 7.
- the control system 7 includes a control device (CNT) 70 and energy increase / decrease devices (EX1, EX2) 71, 72.
- the energy increasing / decreasing devices 71, 72 are devices that increase / decrease the energy of the two actuator elements 41, 42 in order to extract mechanical motion from the two actuator elements 41, 42.
- the energy increasing / decreasing devices 71 and 72 increase or decrease the energy of the two actuator elements 41 and 42 so as to rotate the two actuator elements 41 and 42.
- the control device has at least one arithmetic processing unit (CPU) and at least one memory device as a storage medium for storing programs and data.
- the control device is provided by a microcomputer including a computer-readable storage medium.
- the storage medium is a non-transitional tangible storage medium that stores a computer-readable program in a non-temporary manner.
- the storage medium can be provided by a semiconductor memory or a magnetic disk.
- the controller can be provided by a computer or a set of computer resources linked by a data communication device.
- the program is executed by the control device to cause the control device to function as the device described in this specification and to cause the control device to perform the method described in this specification.
- the control system has a plurality of signal sources that supply signals indicating information input to the control device as input devices.
- the control system acquires information by the control device storing the information in the memory device.
- the control system has a plurality of control objects whose behavior is controlled by the control device as output devices.
- the control system controls the behavior of the control object by converting information stored in the memory device into a signal and supplying the signal to the control object. For example, the control device acquires an operation signal and a stop signal from the outside, and intermittently activates the energy increasing / decreasing devices 71 and 72 to cause the movable device 1 to swing.
- control device, signal source, and control object included in the control system provide various elements. At least some of these elements can be referred to as blocks for performing functions. In another aspect, at least some of these elements can be referred to as modules or sections that are interpreted as configurations. Furthermore, the elements included in the control system can also be referred to as means for realizing the functions only when intentional.
- the means and / or function provided by the control system can be provided by software recorded in a substantial memory device and a computer that executes the software, software only, hardware only, or a combination thereof.
- the controller can be provided by an electronic circuit that is hardware, it can be provided by a digital circuit including a number of logic circuits, or an analog circuit.
- the two actuator elements 41 and 42 are actively deformed in one direction.
- the deformation directions of the two actuator elements 41 and 42 are opposite directions, that is, symmetrical directions.
- an active deformation is obtained in both directions, i.e. in a reciprocating direction.
- Actuator elements 41 and 42 are deformed around actuator axes AX41 and AX42 by increasing or decreasing thermal energy.
- the first actuator element 41 is deformed so as to be twisted when the temperature of the first actuator element 41 rises. Since the fixed end 41b is fixed by the fixing portion 21, the driven body 31 rotates in the direction of the arrow M41 that is the first direction.
- the second actuator element 42 is deformed so as to be twisted when the temperature of the second actuator element 42 rises. Since the fixed end 42b is fixed by the fixing portion 22, the driven body 31 rotates in the direction of the arrow M42 that is the second direction.
- the direction of the arrow M41 and the direction of the arrow M42 are symmetric with respect to the driven body 31. As a result, the driven body 31 rotates over the angular range indicated by the arrow M31.
- the arrow M31 corresponds to the rotation angle VRS of the axis VR32.
- the actuator elements 41 and 42 and the energy increasing / decreasing devices 71 and 72 that can be used in this embodiment include those described in JP-A-2016-42783.
- the content described in Japanese Patent Application Laid-Open No. 2016-42783 is incorporated by reference as an explanation of technical elements in this specification.
- the actuator elements 41 and 42 can be provided by various materials called artificial muscles. For example, materials such as synthetic resins, metals, shape memory alloys, and organic materials can be used.
- One example of the actuator elements 41 and 42 is a synthetic fiber.
- the synthetic fiber extends along an extension line of the rotation axis AXR.
- Synthetic fibers are elongated.
- Synthetic fibers are called polymer fibers.
- One typical example of a polymer fiber is a monofilament resin.
- the monofilament resin includes a polyamide resin and a polyethylene resin.
- a polymer fiber called nylon or polyethylene may have a torsional deformation amount with respect to a temperature change, and can be used as the actuator elements 41 and 42.
- the polymer forming the polymer fiber is oriented so as to extend along the actuator axes AX41 and AX42.
- the polymer may have a “twist” around the actuator axes AX41, AX42.
- the term “twist” may refer to a twist in a single fiber and may refer to a twist between multiple fibers.
- the twist deformation amount with respect to the temperature change of the polymer fiber may appear strongly along the direction of “twist” in the single fiber.
- the actuator elements 41 and 42 are single fibers.
- the amount of torsional deformation with respect to temperature change of the polymer fiber may appear along the direction of “twist” between the plurality of fibers.
- the actuator elements 41 and 42 may be a bundle of a plurality of polymer fibers twisted together.
- One example of the actuator elements 41 and 42 is a shape memory alloy.
- Shape memory alloys extending along the actuator axes AX41, AX42 can be used.
- the shape memory alloy can be used in various shapes such as a single rod shape and a coiled shape.
- the shape of the shape memory alloy is selected so as to obtain a torsional deformation amount with respect to a temperature change.
- the energy increase / decrease devices 71 and 72 change the energy state of the actuator elements 41 and 42 bidirectionally between the high energy state and the low energy state.
- the energy increasing / decreasing devices 71 and 72 can apply and remove energy electrically, optically, magnetically, electromagnetically, or radiationally.
- the application and removal of electrical energy includes an increase or decrease in electrical heat, an increase or decrease in current, an increase or decrease in electric field, or an increase or decrease in charge.
- the temperature can be increased by applying light, and the temperature can be decreased by blocking light.
- Energy application and removal can be performed directly or indirectly.
- energy may be applied by an energy transmission component that directly contacts the actuator elements 41 and 42, or energy may be indirectly applied by an energy transmission component installed away from the actuator elements 41 and 42.
- the energy transmission component can be provided by, for example, an electrical heating member.
- the energy increasing / decreasing devices 71, 72 increase the thermal energy of the actuator elements 41, 42.
- the increase in thermal energy is realized, for example, by supplying current to the heat generating members provided in the actuator elements 41 and 42.
- the energy increasing / decreasing devices 71 and 72 decrease the thermal energy of the actuator elements 41 and 42 in order to return the actuator elements 41 and 42 from active rotation.
- the reduction of the thermal energy is realized, for example, by interrupting the current supply to the heat generating members provided in the actuator elements 41 and 42 to dissipate heat.
- the fixing portion 21 and the fixing portion 22 are arranged symmetrically with respect to the driven body 31.
- the fixed part 21 and the fixed part 22 have a symmetrical structure.
- the driven body 31 has a symmetrical structure with respect to the guide mechanism 5.
- portions related to the first actuator element 41 will be described. This description can be referred to as a description of portions related to the second actuator element 42.
- parts related to the first actuator element 41 there are a fixed portion 21 and a third coupling mechanism 31 c provided on the driven body 31.
- the fixing portion 21 has an end sleeve 21a and an anchor block 21c.
- the end sleeve 21 a is connected to the end of the actuator element 41.
- the end sleeve 21a is fixed to the anchor block 21c.
- the anchor block 21 c is fixed to the base 2.
- the end sleeve 21 a is a cylindrical member coaxial with the actuator element 41.
- the end sleeve 21a may be a polygonal rectangular tube.
- the end sleeve 21 a has an inner hole that receives the fixed end 41 b of the actuator element 41.
- the end sleeve 21a includes a first connecting mechanism 21b that connects the fixed end 41b and the end sleeve 21a.
- the first coupling mechanism 21b couples the fixed end 41b and the end sleeve 21a with respect to the circumferential direction of the actuator shaft AX41 when at least the actuator element 41 outputs turning force.
- the first connecting mechanism 21b is provided by an inner hole and a set screw.
- the set screw is provided in the radial direction toward the inner hole of the end sleeve 21a.
- the set screw connects the fixed end 41b and the end sleeve 21a in the axial direction and the circumferential direction by tightening the fixed end 41b in the radial direction.
- the first coupling mechanism 21b can be provided by various mechanisms.
- the first connecting mechanism 21b can be provided by a plurality of set screws arranged radially, a chuck mechanism for fastening the fixed end 41b in the radial direction, a caulking sleeve for fastening the fixed end 41b in the radial direction, and the like.
- the first connecting mechanism 21b may allow the axial movement of the fixed end 41b relative to the end sleeve 21a along the actuator axis AX41.
- the fixed end 41b and the end sleeve 21a may be coupled so that the fixed end 41b can move in the axial direction within a limited range.
- an elastic member such as a spring or rubber can be used.
- the first connection mechanism 21b may be provided by a mechanism that can be opened and closed.
- the first coupling mechanism 21b can be provided by an electromagnetic mechanism that can switch between a state in which the fixed end 41b is fixed in the circumferential direction and a state in which the fixed end 41b is rotatable in the circumferential direction. .
- the anchor block 21c has an inner hole for receiving the end sleeve 21a.
- the anchor block 21c has a second coupling mechanism 21d that couples the end sleeve 21a and the anchor block 21c.
- the second coupling mechanism 21d couples the end sleeve 21a and the anchor block 21c with respect to the circumferential direction of the actuator shaft AX41 when at least the actuator element 41 outputs turning force.
- the second connecting mechanism 21d is provided by an inner hole and a set screw.
- the set screw is provided in the radial direction toward the inner hole of the anchor block 21c.
- the set screw couples the end sleeve 21a and the anchor block 21c in the axial direction and the circumferential direction by tightening the end sleeve 21a in the radial direction.
- the second connecting mechanism 21d can be provided by various mechanisms.
- the second connecting mechanism 21d can be provided by a plurality of set screws arranged radially, a chuck mechanism that tightens the end sleeve 21a in the radial direction, a caulking sleeve that tightens the end sleeve 21a in the radial direction, and the like.
- the second connecting mechanism 21d may allow the end sleeve 21a to move in the axial direction along the actuator axis AX41.
- the anchor block 21c and the end sleeve 21a may be coupled so that the end sleeve 21a can move in the axial direction within a limited range.
- the second connecting mechanism 21d may be provided by a mechanism that can be opened and closed.
- the second coupling mechanism 21d is an electromagnetic mechanism capable of switching between a state in which the end of the actuator element 41 is fixed in the circumferential direction and a state in which the end of the actuator element 41 is rotatable in the circumferential direction. Can be provided.
- the driven body 31 has an inner hole that receives the output end 41 c of the actuator element 41.
- the driven body 31 includes a third connecting mechanism 31a that connects the driven body 31 and the output end 41c.
- the third connecting mechanism 31a connects the output end 41c and the driven body 31 with respect to the circumferential direction of the actuator shaft AX41 when at least the actuator element 41 outputs rotational power.
- the third coupling mechanism 31a is provided by an inner hole and a set screw.
- the set screw is provided in the radial direction toward the inner hole of the driven body 31.
- the set screw connects the driven body 31 and the output end 41c with respect to the axial direction and the circumferential direction by tightening the output end 41c in the radial direction.
- the third coupling mechanism 31a can be provided by various mechanisms.
- the third coupling mechanism 31a can be provided by a plurality of set screws arranged radially, a chuck mechanism that tightens the output end 41c in the radial direction, a caulking sleeve that tightens the output end 41c in the radial direction, and the like.
- the third coupling mechanism 31a may allow the output end 41c to move in the axial direction with respect to the driven body 31 along the actuator axis AX41.
- the output end 41c and the driven body 31 may be coupled so that the output end 41c can move in the axial direction within a limited range.
- an elastic member such as a spring or rubber can be used.
- the third connection mechanism 31a may be provided by a mechanism that can be opened and closed.
- the third coupling mechanism 31a can be provided by an electromagnetic mechanism capable of switching between a state in which the output end 41c is fixed in the circumferential direction and a state in which the output end 41c is rotatable in the circumferential direction. .
- the driven body 31 is rotatably supported by the guide mechanism 5.
- the guide mechanism 5 has a shaft 51 and a guide bore 52.
- the shaft 51 is provided by a coaxial cylindrical member having a rotation axis AXR.
- the shaft 51 is fixed to the driven body 31. Both ends of the shaft 51 are fixed to the driven body 31.
- the driven body 31 has a shaft 51.
- the guide bore 52 is provided in the support portion 23.
- the support portion 23 has a guide bore 52.
- the support portion 23 is a member for supporting the driven body 31.
- the support part 23 is fixed to the base 2.
- the support part 23 is a block.
- the guide bore 52 is provided by a through hole that penetrates the support portion 23.
- the guide bore 52 receives the shaft 51.
- the guide bore 52 allows the shaft 51 to rotate.
- the support unit 23 supports the driven body 31 in a rotatable manner.
- the outer surface of the shaft 51 and the inner surface of the guide bore 52 are in partial contact.
- the outer surface of the shaft 51 and the inner surface of the guide bore 52 slide with each other when the driven body 31 rotates.
- the driven body 31 is guided around the shaft 51.
- the members that provide the shaft 51 and guide bore 52 are made of a low friction material.
- the member that provides the shaft 51 or the guide bore 52 may be made of a low friction material. Friction between the shaft 51 and the guide bore 52 is suppressed.
- the support part 23 is opposed to the driven body 31 at both end faces thereof.
- the support part 23 is in partial contact with the driven body 31 at both end faces thereof.
- the support portion 23 and the driven body 31 slide with each other when the driven body 31 rotates.
- the heat of the actuator element 41 is radiated from the entire actuator element 41 to the external environment.
- the heat of the actuator element 41 is radiated from the fixed end 41 b via the fixed portion 21.
- the first connecting mechanism 21b and the second connecting mechanism 21d contribute to lowering the thermal resistance of the heat dissipation path.
- the heat of the actuator element 41 is radiated from the output end 41 c via the driven body 31.
- the heat of the actuator element 41 may be radiated from the output end 41 c via the driven body 31, the support portion 23, and the base 2.
- the third coupling mechanism 31a contributes to lower the thermal resistance of the heat dissipation path.
- the contact between the driven body 31 and the support portion 23 and / or the contact between the shaft 51 and the guide bore 52 also contributes to lowering the thermal resistance of the heat dissipation path.
- the heat of the actuator element 41 is radiated from the output end 41 c via the driven body 31, the contact between the driven body 31 and the support portion 23, and the support portion 23.
- the heat of the actuator element 41 is radiated from the output end 41 c through the driven body 31 through the shaft 51, the contact between the shaft 51 and the guide bore 52, and the support portion 23.
- the actuator element 41 radiates heat via the driven body 31 and the guide mechanism 5.
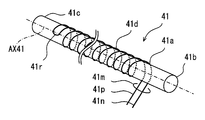
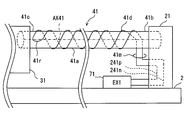
- the actuator element 41 has a material wire 41a, a fixed end 41b, an output end 41c, and a heating wire 41d.
- the material wire 41a is the above-described polymer fiber.
- the heating wire 41 d is also a part of the energy increasing / decreasing device 71.
- the heating wire 41d is also an energy transmission component for increasing or decreasing the energy of the material wire 41a.
- the heating wire 41d is disposed directly or indirectly on the surface of the material wire 41a.
- the heating wire 41d has a spiral shape or a coil shape.
- the heating wire 41d is a metal wire that generates heat when energized.
- the heating wire 41d can be provided by a platinum wire, a copper wire, or the like.
- the heating wire 41d is provided by a nichrome wire.
- the heating wire 41d can be provided by a round wire, a square wire, or a metal foil.
- the heating wire 41d is affixed to the surface of the material wire 41a.
- the heating wire 41d has a positive electrode 41p and a negative electrode 41n.
- the positive electrode 41p and the negative electrode 41n are electric wires that hardly generate heat.
- the positive electrode 41p and the negative electrode 41n are disposed in the connection portion 41m.
- the connection portion 41m is disposed at one end of the two ends of the actuator element 41.
- the connection portion 41m is disposed in the vicinity of the fixed end 41b.
- the heating wire 41d is connected to a normal electric wire, circuit board, flexible circuit board, or the like at the connecting portion 41m.
- the configuration in which both the positive electrode 41p and the negative electrode 41n are arranged in the connection portion 41m simplifies the configuration for electrical connection.
- the heating wire 41d has a return portion 41r.
- the return portion 41r is disposed at the other end of the two ends of the actuator element 41.
- the return portion 41r is disposed in the vicinity of the output end 41c.
- the heating wire 41d is formed in a “write with one stroke” shape that starts from the connecting portion 41m and returns to the connecting portion 41m.
- the heating wire 41d is formed in a reciprocating shape having two spirals.
- the heating wire 41d has a forward path portion that reaches the return portion 41r from the positive electrode 41p.
- the heating wire 41d has a return path portion that reaches the negative electrode 41n from the return portion 41r.
- the forward path part and the return path part are arranged in parallel.
- the heating wire 41d is formed in a spiral shape by winding a nichrome wire bent in a hairpin shape around the material wire 41a.
- the heating wire 41d generates heat when energized.
- the heat supplied by the heating wire 41d is transmitted to the material wire 41a, and raises the temperature of the material wire 41a.
- the heating wire 41d stops generating heat when energization is interrupted.
- the heat of the material wire 41a is radiated to the external environment.
- the third coupling mechanism 31a and the guide mechanism 5 at the output end 41c contribute to heat dissipation. For this reason, a large temperature difference can be realized in the actuator element 41.
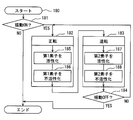
- control process 180 for swinging the driven body 31 is illustrated.
- the control process 180 is a part of the control process in the control device 70.
- step 181 it is determined whether the swing of the movable device 1 is required (ON) or not (OFF). For example, when it is required to operate a scanning infrared sensor, the swing is turned on. When it is not required to operate the scanning infrared sensor, the swing is turned off. If the swing is OFF, the control is terminated. If the swing is ON, the process proceeds to a loop process in steps 182 and 183.
- Step 182 is a process for heating the first actuator element 41.
- Step 183 is a process for heating the second actuator element 42. By alternately repeating Step 182 and Step 183, the driven body 31 operates in a swinging manner.
- step 184 it is determined whether the swing of the movable device 1 is required (ON) or not (OFF).
- Step 182 is a process of rotating the driven body 31 in the forward rotation direction.
- the forward rotation direction is a direction in which the driven body 31 is rotated in the clockwise direction when viewed from the first actuator element 41.
- Step 182 includes step 185 and step 186.
- step 185 first, the first actuator element 41 is activated.
- step 185 the heating wire 41d of the first actuator element 41 is energized.
- the control device 70 energizes the heating wire 41d from the energy increasing / decreasing device 71.
- the process of step 185 is executed so that the first actuator element 41 outputs a twist of a predetermined angle in the forward rotation direction.
- the rotation angle of the driven body 31 is detected by the rotation angle sensor, and step 185 is continued until a predetermined angle of rotation is obtained.
- the process of step 185 may be continued for a predetermined time by a timer process.
- step 186 the first actuator element 41 is inactivated.
- step 186 energization to the heating wire 41d of the first actuator element 41 is cut off.
- the control device 70 cuts off the power supply from the energy increasing / decreasing device 71 to the heating wire 41d.
- Step 183 is a process of rotating the driven body 31 in the reverse direction.
- Step 183 includes step 187 and step 188.
- step 187 first, the second actuator element 42 is activated.
- step 187 the heating wire of the second actuator element 42 is energized.
- the control device 70 energizes the heating wire from the energy increasing / decreasing device 72.
- step 188 the second actuator element 42 is deactivated.
- step 188 energization to the heat generating wire of the second actuator element 42 is cut off.
- the control device 70 cuts off the power supply from the energy increasing / decreasing device 72 to the heating wire.
- activation corresponds to energization to the heating wire 41d.
- Inactivation corresponds to the interruption of energization to the heating wire 41d.
- Activation and deactivation word pairs can be associated with heating and heat dissipation word pairs, energization and deactivation word pairs, and active and standby word pairs.
- the control device 70 controls the energy increasing / decreasing device 71 so as to alternately repeat a period in which the energy of the actuator element 41 increases and a period in which the energy of the actuator element 41 decreases.
- the two actuator elements 41 and 42 are actively driven alternately.
- the first actuator element 41 actively outputs a torsional deformation in the forward rotation direction
- the second actuator element 42 is passively driven in the forward rotation direction.
- the second actuator element 42 is actively outputting torsional deformation in the reverse rotation direction
- the first actuator element 41 is passively driven in the reverse rotation direction. Since two actuator elements 41, 42 are used and are driven alternately, a stable rotational output is obtained in both directions.
- the quiet movable device 1 can be provided. This is particularly advantageous when the movable device 1 is used in a device installed indoors. For example, a quiet scanning infrared sensor can be obtained. Since the movable device 1 includes the guide mechanism 5, vibration of the driven body 31 is suppressed. In particular, vibrations in the direction intersecting the rotation axis AXR, that is, the vertical direction and the horizontal direction with respect to the rotation axis AXR are suppressed. Since the guide mechanism 5 defines a rotation axis AXR that is coaxial with the actuator axis AX41, the torsional deformation of the actuator element 41 can be directly taken out. Further, the guide mechanism 5 contributes to heat dissipation of the actuator element 41.
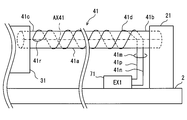
- the actuator element 41 is shown as a model.
- the heating wire 41d is formed in a reciprocating manner along the actuator axis AX41.
- the heating wire 41d is reciprocating with respect to the longitudinal direction of the actuator shaft AX41.
- the heating wire 41d is reciprocating around the actuator axis AX41.
- the actuator element 41 has one end of the actuator shaft AX41 and a fixed end 41b that is fixed.
- the actuator element 41 is the other end of the actuator shaft AX41, is connected to the driven body 31, and has an output end 41c for outputting torsional deformation.
- the connecting part 41m is arranged in the vicinity of the fixed end 41b.
- the connecting portion 41m is disposed closer to the fixed end 41b than the longitudinal center of the actuator shaft AX41.
- the connecting portion 41m is disposed near the fixed end 41b from the center in the longitudinal direction of the actuator shaft AX41.
- the amount of deformation at the fixed end 41b is small. For this reason, the mechanical displacement in the connection part 41m can be suppressed.
- the connection portion arranged in the vicinity of the fixed end 41b contributes to suppressing deterioration of electrical connection.
- the return part 41r is a part for arranging energy transmission components in a reciprocating manner.
- the return part 41r can also be called a turn part.
- the return portion 41r is disposed on the output end 41c side from the center in the longitudinal direction of the actuator shaft AX41.
- the heating wire 41d may be formed in a plurality of reciprocating shapes. For example, an even number of forward paths and an even number of backward paths are provided. In this case, an even number of return portions 41r are arranged in the vicinity of the output end 41c. Further, an odd number of return portions 41r are also arranged in the vicinity of the fixed end 41b.
- An energy increasing / decreasing device 71 is disposed on the base 2.
- the heating wire 41d is electrically connected to the energy increasing / decreasing device 71 at the connecting portion 41m.
- the heating wire 41d is electrically connected to the base 2 at the connection portion 41m.
- Both the positive electrode 41p and the negative electrode 41n are taken out from one narrow position on the elongated actuator element 41, that is, the connection portion 41m.
- Both end portions 41p and 41n of the energy transmission component are collected in a connection portion 41m provided at the end portion of the actuator element 41. Thereby, components required for electrical connection can be concentrated.
- a movable device with improved energy transmission components is provided.
- the heating wire 41d arranged in a reciprocating manner can transmit energy from the heating wire 41d to the material wire 41a over a wide range of the actuator element.
- the positive electrode 41p and the negative electrode 41n that are intensively arranged in the connection portion 41m exhibit the same behavior. For this reason, the deterioration of the electrical connection resulting from the difference between the behavior of the positive electrode 41p and the behavior of the negative electrode 41n is suppressed.
- connection portion 41m is provided closer to the fixed end 41b than the center of the elongated actuator element 41 in the direction of the actuator axis AX41.
- the connection part 41m is provided in the vicinity of the fixed end 41b. This configuration suppresses displacement between the positive electrode 41p and the negative electrode 41n even when the actuator element 41 is deformed.
- a mobile device having a stable electrical connection is provided.
- both the positive electrode 41p and the negative electrode 41n are directly connected to the energy increase / decrease apparatus 71 in the connection part 41m. Instead, in this embodiment, both the positive electrode 241p and the negative electrode 241n are supported by the fixing portion 21.
- the fixing portion 21 supports the positive electrode 241p and the negative electrode 41n.
- the positive electrode 241p and the negative electrode 41n are disposed so as to pass through the fixed portion 21 or are disposed along the surface of the fixed portion 21.
- the positive electrode 241p and the negative electrode 41n are separated from the fixed portion 21 in the vicinity of the connection portion 41m and extend toward the material wire 41a.
- the positive electrode 241p and the negative electrode 41n are separated from the fixed portion 21 in the vicinity of the base 2 and extend toward the energy increasing / decreasing device 71.
- the positive electrode 241p and the negative electrode 41n are stably supported. This configuration contributes to stabilizing the electrical connection.
- the heat generating member is provided with the nichrome wire.
- the heat generating member can be provided by various electric heat generating members.
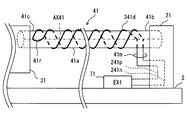
- the heat generating member is formed of a conductive thin film 341d.
- the conductive thin film 341d is disposed on the outer surface of the material wire 41a.
- the conductive thin film 341d may be provided by a film called a conductive polymer or a conductive metal film.
- the film is formed on the surface of the material wire 41a.
- the conductive polymer or the conductive metal film is formed on the surface of the material wire 41a by various methods such as plating, synthesis, and sputtering.
- the shape is a spiral wound around the material wire 41a.
- a spiral energy transmission member may be formed by winding a ribbon-like conductive polymer or conductive metal film formed separately from the material wire 41a and disposed on the outer surface of the material wire 41a. Good.
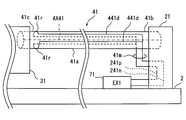
- This embodiment is a modification based on the preceding embodiment.
- the spiral heating wire 41d is employed.
- a linear heating wire 441d is used.
- the energy transmission component is provided by a heating wire 441d.
- the heating wire 441d extends linearly mainly along the actuator axis AX41.
- the heating wire 441d has a return portion 41r.
- the heating wire 441d is formed in a reciprocating shape that turns at the return portion 41r.
- the heating wire 441d has at least two straight portions parallel to each other and a return portion 41r that connects the straight portions at the output end 41c.
- the actuator element 41 has a plurality of heating lines 441d.
- the plurality of heating wires 441d are connected in parallel between the positive electrode 241p and the negative electrode 241n.
- the actuator element 41 has two heating lines 441d and 441d. Four linear portions are arranged at equiangular intervals on the outer surface of the material wire 41a.
- the heating wire 441d is not limited to a reciprocating shape, and may have a plurality of reciprocating portions. This embodiment also improves the stability of the electrical connection.
- Embodiment which is a modification which makes previous embodiment a basic form is described.
- a linear shape can also be employed for the conductive thin film 541d.
- the conductive thin film 541d is provided by a film called a conductive polymer or a conductive metal film, as in the preceding embodiment. Also in this embodiment, the same effect as the preceding embodiment can be obtained.
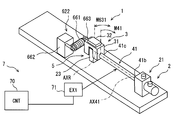
- Embodiment which is a modification which makes previous embodiment a basic form is described.
- two actuator elements 41 and 42 are used.
- only one actuator element 41 may be provided.
- a passive rotation mechanism can be used instead of the second actuator element 42.
- the passive rotation mechanism can be provided by various mechanisms such as rubber, resin spring, metal spring, and air spring.
- a passive rotation mechanism is called a return mechanism.
- the movable device 1 has a return mechanism 622 instead of the second actuator element 42.
- the return mechanism 622 includes a passive elastic member 661, a fixing portion 662, and a fixing portion 663.
- the fixed portion 662 is a block fixed to the base 2.
- the fixing portion 663 is fixed to the driven body 31.
- the elastic member 661 is a metal coil spring.
- the elastic member 661 applies a counterclockwise force to the driven body 31 by being pulled from the free state.
- the elastic member 661 uses one end of the rotation range M631 of the driven body 31 as a reference position.
- the elastic member 661 is arranged to be pulled by the torsional motion of the actuator element 41.
- the elastic member 661 applies a return force against the rotational force in the direction of the arrow M41.
- the reciprocating motion of the driven body 31 can be obtained by one actuator element 41.
- the guide mechanism 5 since the guide mechanism 5 is provided, the driven body 31 is stabilized.
- the configuration of this embodiment can also be used in other preceding embodiments.
- Embodiment which is a modification which makes previous embodiment a basic form is described.
- the energy transmission component directly contacts the material wire 41a and directly transmits energy to the material wire 41a. Instead, in this embodiment, the energy transmission component indirectly transmits energy to the material wire 41a.
- a bobbin 741s which is a cylindrical member, is disposed between the material wire 41a and the heating wire 741d.
- the bobbin 741s has excellent thermal conductivity.
- the bobbin 741s is electrically insulating.
- the bobbin 741s is provided by a glass tube.
- the bobbin 741s may be provided by a resin cylindrical member having a mesh-like wall.
- the bobbin 741s is supported by the fixed portion 21.
- the bobbin 741s may be fixed to the base 2.
- the torsional deformation of the material wire 41a does not affect the connecting portion 41m. Therefore, the bobbin 741s is also a member that insulates mechanical deformation.
- the heating wire 741d is wound around the bobbin 741s.
- the heating wire 741d is in contact with the outer surface of the bobbin 741s.
- the heating wire 741s is held by a bobbin 741s.
- the bobbin 741s around which the heating wire 741d is spirally wound is disposed on the radially outer side of the material wire 41a. Therefore, the heating wire 741d is spirally arranged on the radially outer side of the material wire 41a.
- the torsional deformation of the material wire 41a and the connecting portion 41m are completely separated by the bobbin 741s. For this reason, the stability of the electrical connection in the connection part 41m is improved.
- Embodiment which is a modification which makes previous embodiment a basic form is described.
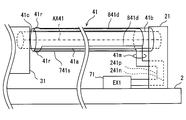
- a linear heating wire 841d is used.
- a linear heating wire 841d can be used instead of the spiral heating wire 741d.
- the heating wire 841d is disposed on the outer surface of the bobbin 741s. This embodiment also improves the stability of the electrical connection.
- a conductive thin film can be used instead of the heating wire.
- the disclosure in this specification is not limited to the illustrated embodiments.
- the disclosure encompasses the illustrated embodiments and variations by those skilled in the art based thereon.
- the disclosure is not limited to the combinations of parts and / or elements shown in the embodiments.
- the disclosure can be implemented in various combinations.
- the disclosure may have additional parts that can be added to the embodiments.
- the disclosure includes those in which parts and / or elements of the embodiments are omitted.
- the disclosure encompasses the replacement or combination of parts and / or elements between one embodiment and another.
- the technical scope disclosed is not limited to the description of the embodiments.
- the guide mechanism 5 is provided by the shaft 51 and the guide bore 52.
- the shaft 51 and the guide bore 52 provide a so-called bearing mechanism.
- the bearing mechanism that provides the guide mechanism 5 can be provided by many mechanisms such as a ball bearing, a fluid bearing, and a magnetic bearing in addition to the sliding bearing as in the embodiment.
- a relatively simple and lightweight sliding bearing is employed.
- the separate shaft 51 is fixed to the driven body 31.
- the shaft may be formed integrally with the driven body 31 or the support portion 23.
- a cylindrical portion in place of the shaft 51 can be formed on the driven body 31 or the support portion 23 by machining.
- a cylindrical portion instead of the shaft 51 may be insert-molded on the driven body 31 or the support portion 23.
- the movable device 1 includes a guide mechanism 5.
- the driven body 31 may be supported by the actuator elements 41 and 42 and the connection member without providing the guide mechanism 5.
- the winding-shaped connecting member enables the driven body 31 to be stably rotated.
- the guide mechanism 5 includes a shaft 51 and a guide bore 52. Instead, a guide mechanism that suspends the driven body like a pendulum, or a guide mechanism that supports the driven body at a fulcrum like an inverted pendulum may be adopted.
- the fixing unit may be provided with a mechanism that mechanically limits the rotation direction.
- a ratchet mechanism can be provided in the fixing portion.
- the ratchet mechanism fixes the fixed end 41b.
- the fixed end 41b rotates in the direction of the arrow M41
- the fixed end 41b is opened.
- the ratchet mechanism is in a fixed state to allow active deformation, and is in an open state to negate passive deformation.
- the fixing force at the fixed end 41b or the output end 41c may be variable.
- the fixing force by the fixing portions 21 and 22 may be changed between an open state and a fixed state, or strength.
- the coupling mechanism 21d may be switched between a state in which it is strongly tightened on the outer peripheral surface of the end sleeve 21a and a state in which it is weakly pressed against the outer peripheral surface of the end sleeve 21a. In this case, the end sleeve 21a rotates while rubbing against the set screw.
- the heating wire 41d is directly wound around the material wire 41a.
- a member may be disposed between the material wire 41a and the heating wire 41d.
- a support member that is electrically insulating and has excellent thermal conductivity can be disposed.
- the support member can be provided by insulating paper wound around the material wire 41a or a glass tube that accommodates the material wire 41a therein.
- the heating wire 41d is in direct contact with the material wire 41a, but in another embodiment, the heating wire 41d is wound without being in direct contact with the material wire 41a.
- a heat generating member may be disposed on the inner surface of the support member.
- the actuator element 41 includes a bobbin 741s.
- the energy transmission component can be supported in a reciprocating manner without the bobbin 741s.
- the heating wire 741d itself may be fixed to the fixing portion 21. Further, the heating wire 741d may be disposed on the inner surface of the bobbin 741s.
- the energy of the material wire 41a is increased or decreased by heating with the heating wire 41d and heat radiation.
- the energy of the material wire 41a can be increased or decreased by cooling with the cooling device and cooling.
- the Peltier effect element can be disposed along the material line 41a. The Peltier effect element provides an energy transfer component. In this case, when the material wire 41a is cooled, the material wire 41a is thermally expanded or contracted to cause torsion deformation.
- a nichrome wire is used as the heating wire 41d.
- the energy transmission component can be provided by various electric heating members.
- the heat generating member may be provided by a conductive thin film called a conductive polymer or a conductive metal film.
- the film is formed on the surface of the material wire 41a.
- the conductive polymer or the conductive metal film is formed on the surface of the material wire 41a by various methods such as plating, synthesis, and sputtering.
- the shape is a spiral wound around the material wire 41a.
- a spiral heat-generating member may be formed by winding a ribbon-like conductive polymer or conductive metal film formed separately from the material wire 41a and disposed outside the material wire 41a.
Landscapes
- Micromachines (AREA)
- General Electrical Machinery Utilizing Piezoelectricity, Electrostriction Or Magnetostriction (AREA)
- Transmission Devices (AREA)
Abstract
L'invention concerne un dispositif mobile comprenant : des éléments actionneurs (41, 42) qui génèrent une déformation en raison d'une augmentation ou d'une diminution de l'énergie; et un corps entraîné (31) relié aux éléments actionneurs. Les éléments actionneurs sont pourvus d'une ligne de matière première (41a) pour générer une déformation et d'un composant de transmission d'énergie (41d, 341d, 441d, 541d, 741d, 841d) qui amène l'énergie de la ligne de matière première à augmenter ou à diminuer et qui est disposé de manière à effectuer un mouvement de va-et-vient le long de l'axe d'actionneur des éléments actionneurs. Par conséquent, il est possible d'augmenter et de diminuer l'énergie de la ligne de matière première dans une large plage le long de l'axe d'actionneur.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201880019581.XA CN110462209B (zh) | 2017-03-23 | 2018-03-07 | 可动装置 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017-057944 | 2017-03-23 | ||
| JP2017057944A JP6794892B2 (ja) | 2017-03-23 | 2017-03-23 | 可動装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2018173745A1 true WO2018173745A1 (fr) | 2018-09-27 |
Family
ID=63585989
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2018/008675 WO2018173745A1 (fr) | 2017-03-23 | 2018-03-07 | Dispositif mobile |
Country Status (3)
| Country | Link |
|---|---|
| JP (1) | JP6794892B2 (fr) |
| CN (1) | CN110462209B (fr) |
| WO (1) | WO2018173745A1 (fr) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019164768A1 (fr) * | 2018-02-20 | 2019-08-29 | Lintec Of America, Inc. | Muscle artificiel non tordu |
| US11002256B2 (en) | 2017-03-23 | 2021-05-11 | Denso Corporation | Movable device |
| CN113302397A (zh) * | 2019-01-11 | 2021-08-24 | Chr.迈尔有限公司及两合公司 | 形状记忆激励器组件及组装方法 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH077975A (ja) * | 1992-06-12 | 1995-01-10 | Sarcos Group | 移動作動器および移動検知器 |
| JPH09312984A (ja) * | 1996-05-21 | 1997-12-02 | Casio Comput Co Ltd | 機能性高分子素子およびその製造方法 |
| US6065934A (en) * | 1997-02-28 | 2000-05-23 | The Boeing Company | Shape memory rotary actuator |
| JP2011117452A (ja) * | 2009-12-04 | 2011-06-16 | Ge Aviation Systems Ltd | 作動装置 |
| WO2017022146A1 (fr) * | 2015-08-04 | 2017-02-09 | パナソニックIpマネジメント株式会社 | Actionneur |
| WO2018020795A1 (fr) * | 2016-07-27 | 2018-02-01 | 株式会社デンソー | Actionneur et dispositif de capteur |
| WO2018020796A1 (fr) * | 2016-07-27 | 2018-02-01 | 株式会社デンソー | Actionneur, dispositif de capteur et dispositif de commande |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3638016B2 (ja) * | 2001-10-01 | 2005-04-13 | コニカミノルタフォトイメージング株式会社 | 形状記憶合金を用いた駆動装置及び駆動制御方法 |
| US9903350B2 (en) * | 2012-08-01 | 2018-02-27 | The Board Of Regents, The University Of Texas System | Coiled and non-coiled twisted polymer fiber torsional and tensile actuators |
| WO2016064220A1 (fr) * | 2014-10-22 | 2016-04-28 | 한양대학교 산학협력단 | Actionneur du type à rotation actionné par une fluctuation de température ou un gradient de température et dispositif récupérateur d'énergie l'utilisant |
-
2017
- 2017-03-23 JP JP2017057944A patent/JP6794892B2/ja active Active
-
2018
- 2018-03-07 WO PCT/JP2018/008675 patent/WO2018173745A1/fr active Application Filing
- 2018-03-07 CN CN201880019581.XA patent/CN110462209B/zh active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH077975A (ja) * | 1992-06-12 | 1995-01-10 | Sarcos Group | 移動作動器および移動検知器 |
| JPH09312984A (ja) * | 1996-05-21 | 1997-12-02 | Casio Comput Co Ltd | 機能性高分子素子およびその製造方法 |
| US6065934A (en) * | 1997-02-28 | 2000-05-23 | The Boeing Company | Shape memory rotary actuator |
| JP2011117452A (ja) * | 2009-12-04 | 2011-06-16 | Ge Aviation Systems Ltd | 作動装置 |
| WO2017022146A1 (fr) * | 2015-08-04 | 2017-02-09 | パナソニックIpマネジメント株式会社 | Actionneur |
| WO2018020795A1 (fr) * | 2016-07-27 | 2018-02-01 | 株式会社デンソー | Actionneur et dispositif de capteur |
| WO2018020796A1 (fr) * | 2016-07-27 | 2018-02-01 | 株式会社デンソー | Actionneur, dispositif de capteur et dispositif de commande |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11002256B2 (en) | 2017-03-23 | 2021-05-11 | Denso Corporation | Movable device |
| WO2019164768A1 (fr) * | 2018-02-20 | 2019-08-29 | Lintec Of America, Inc. | Muscle artificiel non tordu |
| US11221001B2 (en) | 2018-02-20 | 2022-01-11 | Lintec Of America, Inc. | Untwisted artificial muscle |
| CN113302397A (zh) * | 2019-01-11 | 2021-08-24 | Chr.迈尔有限公司及两合公司 | 形状记忆激励器组件及组装方法 |
| CN113302397B (zh) * | 2019-01-11 | 2024-02-27 | Chr.迈尔有限公司及两合公司 | 形状记忆激励器组件及组装方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN110462209A (zh) | 2019-11-15 |
| CN110462209B (zh) | 2021-04-09 |
| JP2018159352A (ja) | 2018-10-11 |
| JP6794892B2 (ja) | 2020-12-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2018173745A1 (fr) | Dispositif mobile | |
| US11002256B2 (en) | Movable device | |
| WO2018173746A1 (fr) | Dispositif mobile | |
| WO2018047505A1 (fr) | Dispositif actionneur | |
| US10432074B2 (en) | Vibrator unit and vibration generator | |
| US11025178B2 (en) | Actuator device | |
| US20110199696A1 (en) | Piezoelectric actuator assembly and optical system including the same | |
| WO2018055972A1 (fr) | Dispositif actionneur | |
| WO2018173743A1 (fr) | Dispositif mobile, son procédé de production et son procédé de commande | |
| WO2018173744A1 (fr) | Dispositif mobile | |
| JP2019500837A (ja) | 可動コイルフレームを備えた高い動特性を有するアクチュエータ | |
| JP6541897B2 (ja) | 駆動ユニットおよびロボット | |
| JP5038437B2 (ja) | スピーカアクチュエータ | |
| JP6387686B2 (ja) | 圧電アクチュエーター | |
| WO2019159754A1 (fr) | Dispositif d'actionneur | |
| WO2022152375A1 (fr) | Architecture d'actionneur en alliage à mémoire de forme pour l'entraînement d'une ouverture réglable | |
| TWI303009B (fr) | ||
| JP2019146466A (ja) | アクチュエータ装置 | |
| WO2019082420A1 (fr) | Dispositif mobile | |
| KR101681221B1 (ko) | 압전형 스텝 모터 | |
| CN218830216U (zh) | 光学驱动器、摄像模组以及电子设备 | |
| KR101648805B1 (ko) | 압전형 스텝 모터 | |
| CN115225791A (zh) | 马达、摄像模组和电子设备 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 18771277 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 18771277 Country of ref document: EP Kind code of ref document: A1 |