WO2018100751A1 - ナビゲーションシステム - Google Patents
ナビゲーションシステム Download PDFInfo
- Publication number
- WO2018100751A1 WO2018100751A1 PCT/JP2016/085987 JP2016085987W WO2018100751A1 WO 2018100751 A1 WO2018100751 A1 WO 2018100751A1 JP 2016085987 W JP2016085987 W JP 2016085987W WO 2018100751 A1 WO2018100751 A1 WO 2018100751A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- target
- controller
- hull
- ship
- berthing
- Prior art date
Links
Images

















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B79/00—Monitoring properties or operating parameters of vessels in operation
- B63B79/40—Monitoring properties or operating parameters of vessels in operation for controlling the operation of vessels, e.g. monitoring their speed, routing or maintenance schedules
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B43/00—Improving safety of vessels, e.g. damage control, not otherwise provided for
- B63B43/18—Improving safety of vessels, e.g. damage control, not otherwise provided for preventing collision or grounding; reducing collision damage
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B49/00—Arrangements of nautical instruments or navigational aids
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B79/00—Monitoring properties or operating parameters of vessels in operation
- B63B79/10—Monitoring properties or operating parameters of vessels in operation using sensors, e.g. pressure sensors, strain gauges or accelerometers
- B63B79/15—Monitoring properties or operating parameters of vessels in operation using sensors, e.g. pressure sensors, strain gauges or accelerometers for monitoring environmental variables, e.g. wave height or weather data
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63H—MARINE PROPULSION OR STEERING
- B63H25/00—Steering; Slowing-down otherwise than by use of propulsive elements; Dynamic anchoring, i.e. positioning vessels by means of main or auxiliary propulsive elements
- B63H25/02—Initiating means for steering, for slowing down, otherwise than by use of propulsive elements, or for dynamic anchoring
- B63H25/04—Initiating means for steering, for slowing down, otherwise than by use of propulsive elements, or for dynamic anchoring automatic, e.g. reacting to compass
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/20—Instruments for performing navigational calculations
- G01C21/22—Plotting boards
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G3/00—Traffic control systems for marine craft
- G08G3/02—Anti-collision systems
Definitions
- the present invention relates to a navigation system.
- Patent Document 1 discloses a method of setting a course between a departure point and a destination based on the longitude and latitude of the destination and automatically maneuvering a large ship according to the set course.
- Patent Document 1 can reach the destination by automatic maneuvering, it does not know what shape the destination berth (pier, quay, etc.) is in shape. Therefore, when approaching the destination, it is necessary to visually check the berthing location while manually maneuvering.
- An object of the present invention is to provide a navigation system capable of guiding a berthing location of a ship.
- the navigation system includes a sensing device and an environment map creation unit.
- the sensing device generates environmental information indicating the shape of the berthing location.
- the environmental map creation unit creates an environmental map indicating the shape of the berthing place based on the environmental information.
- FIG. 1 is a plan view of a small vessel 1 according to the embodiment.
- FIG. 2 is a side view of the small vessel 1.
- the small boat 1 is a jet propulsion boat and is a type of boat called a jet boat or a sports boat.
- the small vessel 1 includes a hull 2, engines 3L and 3R, and propulsion devices 4L and 4R.
- the hull 2 includes a deck 11 and a hull 12.
- the hull 12 is disposed below the deck 11.
- a driver seat 13 and a passenger seat 17 are disposed on the deck 11.
- the small vessel 1 has two engines 3L and 3R and two propulsion devices 4L and 4R. Specifically, the small vessel 1 has a first engine 3L and a second engine 3R. The small vessel 1 has a first propulsion device 4L and a second propulsion device 4R.
- the number of engines is not limited to two, and may be one or three or more.
- the number of propulsion devices is not limited to two, but may be one or three or more.
- the first engine 3L and the second engine 3R are accommodated in the hull 2.
- the output shaft of the first engine 3L is connected to the first propulsion device 4L.
- the output shaft of the second engine 3R is connected to the second propulsion device 4R.
- the first propulsion device 4L is driven by the first engine 3L to generate a propulsive force that moves the hull 2.
- the second propulsion device 4R is driven by the second engine 3R to generate a propulsive force that moves the hull 2.
- the first propulsion device 4L and the second propulsion device 4R are arranged side by side.
- the first propulsion device 4L is a jet propulsion device that sucks and injects water around the hull 2.
- FIG. 3 is a side view showing the configuration of the first propulsion device 4L. In FIG. 3, a part of the first propulsion device 4L is shown in cross section.
- the first propulsion device 4L includes a first impeller shaft 21L, a first impeller 22L, a first impeller housing 23L, a first nozzle 24L, a first deflector 25L, and a first reverse bucket. 26L.
- the first impeller shaft 21L is disposed so as to extend in the front-rear direction.
- the front portion of the first impeller shaft 21L is connected to the output shaft of the engine 3L via a coupling 28L.
- the rear portion of the first impeller shaft 21L is disposed in the first impeller housing 23L.
- the first impeller housing 23L is disposed behind the water suction portion 27L.
- the first nozzle 24L is disposed behind the first impeller housing 23L.
- the first impeller 22L is attached to the rear part of the first impeller shaft 21L.
- the first impeller 22L is disposed in the first impeller housing 23L.
- the first impeller 22L rotates with the first impeller shaft 21L and sucks water from the water suction part 27L.
- the first impeller 22L jets the sucked water backward from the first nozzle 24L.
- the first deflector 25L is disposed behind the first nozzle 24L.
- the first reverse bucket 26L is disposed behind the first deflector 25L.
- the 1st deflector 25L is comprised so that the injection direction of the water from the 1st nozzle 24L may be changed into the left-right direction. That is, the traveling direction of the small vessel 1 is changed to the left and right by changing the direction of the first deflector 25L to the left and right.
- the first reverse bucket 26L is provided to be switchable between a forward position and a reverse position.
- water from the first nozzle 24L and the first deflector 25L is jetted backward.
- the first reverse bucket 26L switches the direction of water injection from the first nozzle 24L and the first deflector 25L forward in the reverse drive position. Thereby, the small vessel 1 moves backward.
- the second propulsion device 4R includes a second impeller shaft, a second impeller, a second impeller housing, a second nozzle, a second deflector, and a second reverse bucket.
- the second impeller shaft, the second impeller, the second impeller housing, the second nozzle, the second deflector, and the second reverse bucket are respectively the first impeller shaft 21L, the first impeller 22L, and the first
- the configuration is the same as that of the impeller housing 23L, the first nozzle 24L, the first deflector 25L, and the first reverse bucket 26L, and detailed description thereof is omitted.
- FIG. 4 is a schematic diagram showing a ship maneuvering mechanism and a control system of the small boat 1.
- the small vessel 1 includes a controller 41.
- the controller 41 includes an arithmetic device such as a CPU and a storage device such as a RAM and a ROM, and is programmed to control the small vessel 1.
- the small vessel 1 includes a first ECU (Engine control unit) 31L, a first steering actuator 32L, a first steering CU (control33unit) 33L, a first shift actuator 34L, and a first shift CU (control unit) 35L. have. These configurations are devices for controlling the first propulsion device 4L.
- Each of the first ECU 31L, the first steering CU33L, and the first shift CU35L includes an arithmetic device such as a CPU and a storage device such as a RAM and a ROM, and is programmed to control connected devices.
- the first ECU 31L is communicably connected to the first engine 3L.
- the first ECU 31L outputs a command signal to the first engine 3L.
- the first steering actuator 32L is connected to the first deflector 25L of the first propulsion device 4L.
- the first steering actuator 32L changes the steering angle of the first deflector 25L.
- the first steering actuator 32L is, for example, an electric motor.
- the first steering CU33L is communicably connected to the first steering actuator 32L.
- the first steering CU33L outputs a command signal to the first steering actuator 32L.
- the first shift actuator is connected to the first reverse bucket 26L of the first propulsion device 4L.
- the first shift actuator switches the position of the first reverse bucket 26L between the forward position and the reverse position.
- the first shift actuator 34L is, for example, an electric motor.
- the first shift CU 35L is communicably connected to the first shift actuator 34L.
- the first shift CU 35L outputs a command signal to the first shift actuator 34L.
- the small vessel 1 has a second ECU 31R, a second steering actuator 32R, a second steering CU33R, a second shift actuator 34R, and a second shift CU35R.
- These configurations are devices for controlling the second propulsion device 4R, and the first ECU 31L, the first steering actuator 32L, the first steering CU33L, the first shift actuator 34L, and the first shift CU35L described above. It is the same composition.
- the small vessel 1 includes a steering device 14, a joystick 42, a remote control unit 15, a display 43, an input device 44, a position sensor 45, a sensing device 46, and a transmission / reception unit 50.
- the steering device 14, the display 43, the input device 44, the position sensor 45, and the sensing device 46 include a controller 41, first and second ECUs 31L and 31R, first and second steering units CU33L and 33R, and first and second steering units CU33L and 33R.
- the second shift CUs 35L and 35R are communicably connected to each other. For example, these devices are connected to each other by CAN (Controller Area Network) or CAN-FD.
- the devices are connected to each other, information can be transmitted between the devices at the same time. Thereby, cooperative control of steering, shifting, and throttle can be easily performed. In addition, these devices are connected in a double system. Thereby, stable communication can be ensured.
- the remote control unit 15 is connected to the controller 41 in an analog manner. However, the remote control unit 15 may also be connected via a network such as CAN as with other devices.
- the steering device 14 is disposed in the driver's seat 13.
- the steering device 14 includes, for example, a steering wheel.
- the steering device 14 is operated to steer the hull 2.
- the steering device 14 outputs an operation signal.
- the first steering CU33L and the second steering CU33R control the first and second steering actuators 32L, 32R according to the operation of the steering operation device 14. Thereby, the advancing direction of the small boat 1 is changed to right and left.
- the remote control unit 15 is disposed in the driver's seat 13.
- the remote control unit 15 is operated for adjusting the outputs of the engines 3L and 3R and switching between forward and backward travel.
- the remote control unit 15 includes a first throttle operation member 15L and a second throttle operation member 15R.
- the first throttle operation member 15L and the second throttle operation member 15R are, for example, lever-shaped members.
- the remote control unit 15 outputs a signal indicating the operation amount and operation direction of the first and second throttle operation members 15L and 15R.
- the first ECU 31L controls the rotational speed of the first engine 3L according to the operation amount of the first throttle operation member 15L.
- the second ECU 31R controls the rotation speed of the second engine 3R according to the operation amount of the second throttle operation member 15R.
- the first shift CU 35L controls the first shift actuator 34L according to the operation direction of the first throttle operation member 15L.
- the second shift CU35R controls the second shift actuator 34R according to the operation direction of the second throttle operation member 15R. Thereby, the forward / backward movement of the small vessel 1 is switched.
- the joystick 42 is disposed in the driver's seat 13.
- the joystick 42 is operated to move the hull 2 forward, backward, left and right.
- the joystick 42 is operated to change the direction of the hull 2.
- An operation signal is input to the controller 41 from the joystick 42.
- the controller 41 controls the first and second engines 3L and 3R, the first and second steering actuators 32L and 32R, and the first and second shift actuators 34R according to the operation of the joystick 42.
- the small boat 1 moves back and forth and right and left. Or, the small vessel 1 turns to change the direction.
- the display 43 and the input device 44 are arranged in the driver's seat 13.
- the display 43 displays information related to the small vessel 1.
- the display 43 receives a display signal from the controller 41.
- the display 43 displays information according to the display signal from the controller 41.
- the input device 44 receives input related to a small vessel.
- the input device 44 outputs an input signal indicating the input information.
- the input device 44 may be configured integrally with the display 43 by a touch panel. Alternatively, the input device 44 may be separate from the display 43.
- the position sensor 45 detects the current position and the current direction of the hull 2 and outputs position information indicating the current position and the current direction.
- the position sensor 45 is, for example, an inertial navigation device, and includes a GNSS (Global Navigation Satellite System) device 47 and an IMU (Inertial Measurement Unit) 48.
- the GNSS device 47 detects the current position of the hull 2 and the boat speed.
- the IMU 48 detects the angular velocity and acceleration of the hull 2. Further, the current azimuth of the hull 2 is detected by the GNSS device 47 and the IMU 48.
- the current direction may be detected by a plurality of GNSS devices, a magnetic direction sensor, or an electronic compass.
- the sensing device 46 includes one type or a plurality of types of sensors among radar, laser, camera, and ultrasonic sensor.
- the sensing device 46 may include a plurality of radars, a plurality of lasers, a plurality of cameras, or a plurality of ultrasonic sensors. Radars include, for example, millimeter wave radars, microwave radars, or other radars with different wavelengths.
- the sensing device 46 generates and outputs environment information.
- the environmental information indicates the shape of the docking location, the positional relationship between the docking location and the hull 2, and the objects (such as other ships, structures and obstacles) around the docking location.
- the environmental information is indicated by, for example, the coordinates of a point group indicating the position of the object detected by the sensing device 46.
- the environment information may be the shape and position of an object grasped by image recognition.
- the sensing device 46 may be connected to the CAN or CAN-FD via a PLD (programmable logic device) such as an FPGA (field-programmable gate array) 49.
- a PLD programmable logic device
- FPGA field-programmable gate array
- the sensing device 46 may be connected to CAN or CAN-FD via a DSP (digital signal processor).
- the transmission / reception unit 50 can transmit / receive information to / from the server 51 via the ship-land communication line.
- the ship-land communication line includes mobile phone lines, Wi-Fi (Registered Trademark) standards-compliant wireless LAN (Local Area Network) lines, PHS (Personal Handy-phone System) lines, and the International Maritime Satellite Organization (INMARSAT) A satellite communication line such as can be used.
- the transmission / reception unit 50 acquires environmental information detected by the sensing device 46 and position information of the own ship detected from the position sensor 45 from the controller 41 after completion of automatic berthing control described later.
- the transmission / reception unit 50 transmits the acquired environment information and position information to the server 51.
- the server 51 is a virtual server (cloud server) or a physical server.
- the server 51 is an example of an “environment map creation unit”.
- the server 51 collects environmental information and position information not only from the small boat 1 but also from other boats other than the small boat 1.
- the server 51 creates an environmental map indicating the shape of the berthing location based on the environmental information collected from each ship.
- the server 51 shows the shape of the obstacle around the docking place and the shape of the structure around the docking place on the environment map based on the collected environmental information.
- the server 51 shows the position and shape of each ship moored at the docking place on the environment map based on the position information collected from each ship.
- the server 51 updates the shapes of the ship, the obstacle, and the structure on the environment map. Thereby, the surrounding environment of the docking place is updated on the environment map.
- the transmission / reception unit 50 transmits an environmental map transmission request to the server 51.
- the transmission / reception unit 50 receives the environment map from the server 51 when the server 51 has the environment map.
- the transmission / reception unit 50 transmits the environment map received from the server 51 to the controller 41.
- the environment map acquired from the server 51 is used for automatic berthing control described later.
- the controller 41, the position sensor 45, the sensing device 46, the transmission / reception unit 50, and the server 51 constitute a “navigation system” for guiding the berthing location of the small vessel 1.
- the small vessel 1 has an automatic berthing function.
- the automatic berthing function is a function for automatically berthing the hull 2 at a berthing position such as a jetty without an operation by the operator.
- automatic landing control executed in the automatic landing function will be described in detail.
- FIGS. 5 to 8 are flowcharts showing the automatic berthing control process executed by the controller 41.
- step S101 the controller 41 acquires position information from the position sensor 45.
- the controller 41 acquires the current position and current direction of the hull 2 in real time based on the position information.
- step S102 the controller 41 determines whether or not an environmental map has been acquired from the server 51.
- the process proceeds to step S106.
- the process proceeds to step S103.
- step S103 the controller 41 determines whether the sensing device 46 is capturing a sensing target. When the sensing device 46 is capturing an object, the process proceeds to step S104.
- step S104 the controller 41 uses the sensing device 46 to obtain environmental information indicating the shape of the docking location, the positional relationship between the docking location and the hull 2, and objects (such as other ships, structures, and obstacles) around the docking location. To do.
- step S105 the controller 41 or the FPGA 49 recognizes a docking place, another ship, an obstacle, or a surrounding structure based on the environmental information.
- the docking place is, for example, a pier.
- the controller 41 or the FPGA 49 recognizes other ships and obstacles based on the shape of the object detected by the sensing device 46.
- the controller 41 or the FPGA 49 recognizes the berthing place and the surrounding structure based on the height and length of the object detected by the sensing device 46.
- step S106 the controller 41 displays an environmental map indicating the surrounding environment on the display 43.
- FIG. 9 is a diagram showing an operation screen 61 for the automatic berthing function. As shown in FIG. 9, the operation screen 61 is displayed on the display 43 by a GUI.
- the operation screen 61 includes an environment map 62 and a plurality of operation keys. By pressing a plurality of operation keys, input of various operations of the automatic berthing function is received by the input device 44.
- the environment map 62 shows the shape of the berthing location, obstacles and surrounding structures. Although not shown in FIG. 9, other ships recognized by the controller 41 are also shown in the environment map 62. Based on the position information acquired from the position sensor 45, the controller 41 indicates the current position and current direction of the hull 2 on the environment map 62 by the icon 71 of the hull 2.
- the environment map 62 is updated in real time as the position information by the position sensor 45 and the detection of the environment information by the sensing device 46 are repeated.
- the plurality of operation keys include a scale change key 63. By operating the scale change key 63, the display scale of the environmental map 62 is enlarged or reduced.
- FIG. 6 is a flowchart showing a process for setting a target position for berthing.
- the controller 41 determines a berthing available space.
- the controller 41 determines a berthing available space based on the environment information.
- the controller 41 determines a position along the object recognized as a berthing place as a berthing available space SP1.
- the controller 41 detects the arrangement of the pier from the environment information, and determines a predetermined range along the pier as the dockable space SP1.
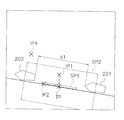
- the controller 41 detects the berthing location and the arrangement of other ships anchored at the berthing location from the environment information, and determines the berthing available space SP1 from the arrangement of the berthing location and the other vessels. As shown in FIG. 10, when the two other ships 201 and 202 are anchored at intervals, the controller 41 calculates a distance d1 between the two other ships 201 and 202. When the distance d1 between the two other ships 201 and 202 is larger than the threshold value indicating the space where the own ship can be anchored, the controller 41 can pierce the space between the two other ships 201 and 202. Determine as SP1.
- the controller 41 displays a berthing position on the environment map 62.
- the dockable position may be the above-described dockable space SP1.
- the dockable position may be a specific position in the dockable space SP1.
- the environment map 62 on which the dockable position is displayed may be an overhead view.
- an image photographed by the camera may be displayed as the environment map 62. In that case, the dockable position may be displayed on the image photographed by the camera.
- step S203 the controller 41 determines whether or not the target position for landing is input.
- the input of the target position in the environment map 62 is received by the input device 44.
- the input device 44 When the operator touches the dockable position on the environment map 62, the touched position is input as the target position.
- the input device 44 outputs target position information indicating the target position to the controller 41.
- step S204 the controller 41 determines whether or not the input target position is within the appropriate range SP2. When the input target position is within the appropriate range SP2, the process proceeds to step S205.
- step S205 the controller 41 corrects the target position.
- the controller 41 corrects the target position based on the berthing available space SP1. For example, as shown in FIG. 10, when the input target position IP1 is outside the dockable space SP1, the target position Tp is corrected so that the target position is within the dockable space SP1. When the input target position IP2 is in the berthing available space SP1, the controller 41 corrects the target position Tp so that the target position becomes the center position of the berthing available space SP1.
- the operation screen 61 includes a target position setting key 64.
- the target position setting key 64 When the target position setting key 64 is pressed, the operator can manually input an arbitrary position that is not limited to the space SP1. Accordingly, the touched position is received by the input device 44 as the target position.
- the controller 41 may correct the target position to a position along the docking location when a position away from the docking location in a direction perpendicular to the direction along the docking location is input as the target position.
- the target position Tp is corrected to a position closest to the input target position IP3 among the positions along the berthing place.
- step S203 If the target position is not input in step S203, the process proceeds to step S206. For example, when a predetermined time has passed without touching the environment map 62, the process proceeds to step S206.
- step S206 the controller 41 automatically sets the target position.
- the controller 41 sets the nearest position in the current bow direction as a target position among the positions along the berthing place.
- step S207 the controller 41 displays the target position and the target direction on the environment map 62 with the icon 71 '.
- the controller 41 sets the ship at the position on the environment map 62 with the target position corrected in step S205 or the target position automatically set in step 206 as the target position.
- An icon 71 ′ is displayed.
- the icon 71 ′ is displayed with the target orientation determined by the controller 41 in the initial state.
- the controller 41 determines the target azimuth of the hull 2 based on the shape of the docking place, the current azimuth, or the distance to the target position. For example, when the docking place is a pier, the controller 41 determines the direction along the edge of the docking place as the target direction. Or the controller 41 may determine the direction which makes a predetermined angle with the direction along the edge of a berthing place as a target azimuth
- the operation screen 61 includes a first orientation change key 65 and a second orientation change key 66.
- the target direction is changed by a predetermined angle (for example, 90 degrees).
- the change unit angle is not limited to 90 degrees, and may be smaller than 90 degrees or larger than 90 degrees.
- the second direction change key 66 is rotatably provided on the operation screen 61.
- the target orientation is changed according to the rotation of the second orientation change key 66.
- the direction of the ship icon 71 'on the environment screen is also changed.
- the target position input in step S204 is not within the appropriate range SP2, the target position is not corrected, and the input target position is set as the target position.
- the appropriate range SP2 is a range including the berthing available space SP1.
- the target position is not corrected. Accordingly, when the input target position IP4 is separated from the berthing available space SP1 by a predetermined distance or more, the input target position is set as the target position without being corrected.
- the size of the appropriate range SP2 is set to such a value that it can be determined that the position of the target position is not deviated but is intentionally touched at a position away from the dockable space SP1.
- the operation screen 61 includes an automatic berthing mode start button 67 and an automatic berthing mode stop button 68.
- the automatic landing control is started.
- the controller 41 When the automatic docking control is started, the controller 41 generates a command signal for controlling the propulsion devices 4L and 4R so as to dock the hull 2 at the target position.
- processing after the start of the automatic berthing control will be described.
- step S301 the controller 41 determines whether automatic berthing control has been started.
- the process proceeds to step S302.
- the controller 41 determines whether the small vessel 1 has reached the second target position.
- the second target position TP2 is the current position side of the small vessel 1 from the first target position TP1, with the target position and target orientation determined in the above-described steps S201 to S207 as the first target position TP1. Is a position separated by a predetermined offset amount.
- the controller 41 first controls the propulsion devices 4L and 4R so that the small vessel 1 reaches the second target position TP2, and then propels the small vessel 1 to reach the first target position TP1.
- the devices 4L and 4R are controlled.
- the second target position TP2 will be described later.
- step S302 when the small vessel 1 has not reached the second target position TP2, the process proceeds to step S303.
- step S303 the controller 41 determines whether the position error and the azimuth error are equal to or less than the first threshold value.
- the position error is a distance between the current position of the hull 2 and the second target position TP2.
- the heading error is the difference between the current heading of the hull 2 and the target heading.
- the controller 41 is configured such that the distance between the current position of the hull 2 and the second target position TP2 is equal to or smaller than the first position threshold, and the difference between the current bearing and the target bearing of the hull 2 is equal to or smaller than the first bearing threshold.
- it determines with a position error and an azimuth
- step S304 the controller 41 determines the second target position TP2.
- the controller 41 calculates an azimuth difference between the current azimuth and the target azimuth, and determines an offset amount L of the first target position TP1 according to the azimuth difference.
- the controller 41 determines an offset amount L and a position away from the first target position TP1 to the current position side as the second target position TP2. That is, the controller 41 determines an offset amount L and a position away from the first target position TP1 as the second target position TP2 in a direction perpendicular to the edge of the berthing place.
- the controller 41 determines the offset amount by the following equation (1).
- a is a predetermined coefficient, and is determined based on the distance between the center of gravity of the hull 2 and the bow.
- Heading_err is an azimuth difference between the current azimuth and the first target azimuth. However, when Heading_err ⁇ 90 degrees, Heading_err is set to 90 degrees.
- b is a margin according to the hull 2 with respect to the target direction and the direction along the edge of the docking place.
- W is the width of the other ship.
- the controller 41 calculates the heading difference according to the heading difference between the current heading and the target heading, and the hull 2.
- the controller 41 determines the offset amount L of the first target position TP1 according to the heading difference and the margin according to the hull 2.
- the controller 41 increases the offset amount L according to the increase of the heading difference Heading_err.
- the controller 41 determines the offset amount based on the distance between the center of gravity of the hull 2 and the bow.
- the controller 41 determines the offset amount so as to be larger than the width W of the other ship anchored at the docking place.
- the offset amount is calculated and updated in real time.
- the controller 41 determines the second target position TP2 while avoiding the obstacle.
- the environment map 62 is provided with a grid. The controller 41 determines the second target position TP2 except for the grid that is within a predetermined range from the obstacle X1.
- the controller 41 determines a target navigation route Ph1 to the second target position TP2.
- the controller 41 sets the shortest route to the second target position TP2 among the routes passing through the set grid as the target navigation route Ph1.
- the controller 41 determines the target navigation route Ph1 by excluding the grid within the predetermined range from the object recognized as the obstacle.
- the determined target navigation route Ph1 is displayed on the environment map 62.
- the controller 41 calculates and updates the target navigation route Ph1 in real time.
- the grid arrangement is set such that a predetermined number of grids are arranged between the current position of the hull 2 and the target position. Therefore, when the distance between the hull 2 and the target position is changed, the arrangement of the grid is changed.
- step S305 the controller 41 changes the target position from the first target position TP1 to the second target position TP2.
- step S303 when the position error and the azimuth error are equal to or smaller than the first threshold value, the process proceeds to step S306. That is, even if the small vessel 1 has not completely reached the second target position TP2, if the current position is close to the second target position TP2 and the current direction is close to the target direction, the process proceeds to step S306. .
- step S306 the controller 41 determines a target speed and a target angular speed from the target position and the target direction.
- the controller 41 determines the target speed and the target angular speed with the second target position TP2 as the target position. .
- the controller 41 determines the target speed and the angular speed with the first target position TP1 as the target position. To do.
- the controller 41 calculates a relative error Pb_err from the target position and the current position, the target azimuth and the current azimuth, and determines the target speed / angular speed Vc based on the relative error Pb_err.
- the controller 41 decreases the target speed / angular speed Vc according to the decrease in the relative error Pb_err. That is, the controller 41 decreases the target speed when the current position of the hull 2 approaches the target position.
- the controller 41 decreases the target angular velocity when the current direction of the hull 2 approaches the target direction. Then, when the distance between the current position of the hull 2 and the target position falls within a predetermined range including zero, the controller 41 sets the target speed to zero. Further, when the difference between the current azimuth of the hull 2 and the target azimuth falls within a predetermined range including zero, the controller 41 sets the target angular velocity to zero.
- the relative error Pb_err includes a first position error Pb_err_x, a second position error Pb_err_y, and an azimuth error Pb_err_ ⁇ .
- the first position error Pb_err_x is a distance between the target position and the current position in the front-rear direction of the hull 2.
- the second position error Pb_err_y is the distance between the target position and the current position of the hull 2 in the left-right direction.
- the bearing error Pb_err_ ⁇ is a difference between the target bearing and the current bearing.
- the target speed / angular speed Vc includes a first target speed Vc_x, a second target speed Vc_y, and a target angular speed ⁇ c.
- the first target speed Vc_x is a target speed in the front-rear direction of the hull 2.
- the second target speed Vc_y is a target speed in the left-right direction of the hull 2.
- the target angular velocity ⁇ c is the target angular velocity of the hull 2.
- the controller 41 stores first target speed information Ivcx, second target speed information Ivcy, and target angular speed information I ⁇ c.
- the first target speed information Ivcx defines the relationship between the first position error Pb_err_x and the first target speed Vc_x.
- the second target speed information Ivcy defines the relationship between the second position error Pb_err_y and the second target speed Vc_y.
- the target angular velocity information I ⁇ c defines the relationship between the azimuth error Pb_err_ ⁇ and the target angular velocity ⁇ c.
- the controller 41 determines the first target speed Vc_x from the first position error Pb_err_x based on the first target speed information Ivcx.
- the controller 41 determines the second target speed Vc_y from the second position error Pb_err_y based on the second target speed information Ivcy.
- the controller 41 determines the target angular velocity ⁇ c based on the target angular velocity information I ⁇ c.
- the target speed / angular speed Vc may be determined by the following equation (2).
- any one of the first position error Pb_err_x, the second position error Pb_err_y, the bearing error Pb_err_ ⁇ , the actual longitudinal velocity Vx of the hull 2, the actual lateral velocity Vy, and the actual angular velocity ⁇ is used. Also good. [Equation 2]
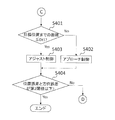
- step S401 the controller 41 determines whether the distance from the current position to the target position is equal to or less than a predetermined threshold value Dt1. If the distance to the target position is not less than or equal to the predetermined threshold value Dt1, the process proceeds to step S402.
- step S402 the hull 2 is controlled by approach control. In approach control, the controller 41 determines the target propulsive force and the target rudder angle of the propulsion devices 4L and 4R based on the first target speed Vc_x and the target angular speed ⁇ c.
- step S401 If it is determined in step S401 that the distance from the current position to the target position is equal to or less than the predetermined threshold value Dt1, the process proceeds to step S403.
- step S403 the hull 2 is controlled by the adjustment control.
- the target propulsive force and the target rudder angle of the propulsion devices 4L and 4R are determined based on the first target speed Vc_x, the second target speed Vc_y, and the target angular speed ⁇ c.
- the target position and the target direction can be quickly reached by the approach control. Further, when the distance to the target position is equal to or less than the predetermined threshold value Dt1, the hull 2 can be accurately reached at the target position by the adjustment control.
- step S402 and step S403 the controller 41 calculates the force due to the disturbance and determines the target propulsive force and the target steering angle of the propulsion devices 4L and 4R in consideration of the force due to the disturbance.
- the force caused by disturbance is, for example, a tidal current or a force caused by wind.
- the calculated results include fluctuations in resistance to the hull due to weight fluctuations and the like.
- the controller 41 determines the target propulsive force and the target rudder angle based on the force due to the disturbance, the target speed, and the target angular speed.
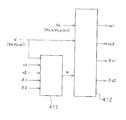
- FIG. 17 is a control block diagram for determining the target propulsive force and the target rudder angle.
- the controller 41 includes a disturbance observer 411 and a target propulsive force / steering angle calculation unit 412.
- the disturbance observer 411 includes the actual speed / angular speed V of the hull 2, the actual engine speed n1 of the first engine 3L, the actual engine speed n2 of the second engine 3R, and the actual speed of the first propulsion device 4L.
- the force w due to disturbance is calculated.
- the actual velocity / angular velocity V of the hull 2 includes the actual longitudinal velocity Vx of the hull 2, the actual lateral velocity Vy, and the actual angular velocity ⁇ .
- the target propulsive force / steering angle calculation unit 412 calculates the target propulsive force based on the target speed / angular velocity Vc, the actual speed / angular velocity V of the hull 2, and the force w due to disturbance.
- the controller 41 estimates the force w due to disturbance by the following equation (3). [Equation 3] Is the equation of motion of the hull 2. Is the time derivative of V. Is an estimation by the equation of motion of the hull 2.
- the controller 41 calculates a target propulsive force based on, for example, Lyapunov's stability theory using the equation of motion shown in the following equation (4). [Equation 4]
- the target propulsive force / steering angle calculation unit 412 determines a target rotational speed nc1 of the first engine 3L and a target rotational speed nc2 of the second engine 3R from the target propulsive force.
- the controller 41 generates a command signal corresponding to the target rotational speed nc1 of the first engine 3L and outputs it to the first ECU 31L.
- the controller 41 generates a command signal corresponding to the target rotational speed nc2 of the second engine 3R and outputs it to the second ECU 31R.
- the target propulsive force / steering angle calculation unit 412 also uses the target rudder angle ⁇ c1 of the first propulsion device 4L based on the target speed / angular velocity Vc, the actual speed / angular velocity V of the hull 2, and the force w due to disturbance. And the target rudder angle ⁇ c2 of the second propulsion device 4R are determined.
- the controller 41 generates a command signal corresponding to the target steering angle ⁇ c1 of the first propulsion device 4L and outputs the command signal to the first steering CU33L.
- the controller 41 generates a command signal corresponding to the target steering angle ⁇ c2 of the second propulsion device 4R and outputs the command signal to the second steering CU33R.
- step S404 the controller 41 determines whether the position error and the azimuth error are equal to or smaller than the second threshold value. Specifically, the controller 41 determines that the distance between the current position and the target position of the hull 2 is equal to or smaller than the second position threshold value, and the difference between the current direction and the target direction of the hull 2 is equal to or smaller than the second direction threshold value. At a certain time, it is determined that the position error and the azimuth error are not more than the second threshold value. Note that a value smaller than the above-described offset amount is set as the second position threshold.
- the controller 41 ends the automatic landing control. Note that the controller 41 also ends the automatic landing control when the automatic landing mode stop key 68 shown in FIG. 9 is pressed.
- step S501 the controller 41 determines whether or not the automatic landing control has been completed. When automatic berthing control is not completed, the process repeats step S501. When automatic berthing control ends, the process proceeds to step S502.
- step S502 the controller 41 acquires environmental information indicating the shape of the docking place and surrounding objects (such as other ships, structures, and obstacles) from the sensing device 46, and indicates the current position and current direction of the ship. Information is acquired from the position sensor 45.
- step S503 the controller 41 transmits the environment information and the position information to the server 51 via the transmission / reception unit 50.
- step S601 the server 51 acquires environmental information and position information from one or more ships including the small ship 1.
- the server 51 may improve the accuracy of the position information using the position correction information.
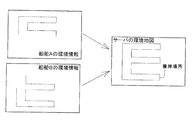
- step S602 the server 51 creates an environmental map indicating the shape of the berthing place based on the environmental information acquired from each ship.
- FIG. 20 is a schematic diagram of an environmental map created based on the environmental information acquired from each of the ships A and B.
- step S603 the server 51 indicates the shape of an object (another ship, a structure, an obstacle, etc.) around the berthing place on the environment map based on the environment information acquired from each ship.
- FIG. 21 is a schematic diagram of an environmental map showing the shape of an object around a berthing location.
- step S604 the server 51 shows the position and shape of each ship moored at the berthing place on the environment map based on the position information acquired from each ship.
- FIG. 22 is a schematic diagram of an environmental map in which the positions and shapes of the ships A and B are shown.
- step S605 when the server 51 receives an environmental map transmission request from each ship, the server 51 transmits the environmental map to each ship.
- the environmental map can be used for automatic berthing control as described above, but can also be used for manual boat maneuvering.
- the server 51 creates an environment map indicating the shape of the berthing place based on the environment information generated by the sensing device 46. Therefore, since the ship operator can confirm the shape of the docking place (such as a pier and a quay) in advance by looking at the environment map, the ship can be moored quickly.
- the environment information indicates the shape of the object around the berthing location
- the server 51 indicates the shape of the object around the shore location on the environment map based on the environment information. Accordingly, when the operator is mooring the ship, other ships, structures, obstacles and the like can be confirmed in advance, so that the ship can be moored more quickly.
- the server 51 indicates the shape of the small vessel 1 on the environment map based on the position information indicating the current position and the current direction of the small vessel 1. Therefore, even if the sensing device 46 is installed in the small vessel 1, the shape of the ship can be shown on the environment map of the server 51.
- the small vessel 1 uses the environmental map acquired from the server 51 for automatic berthing control. Therefore, since it is not necessary to detect environmental information by the sensing device 46, automatic berthing control can be executed promptly.
- the small vessel 1 is not limited to a jet propulsion boat, but may be other types of small vessels.
- it may be a small vessel including an outboard motor having a propeller driven by engines 3L and 3R. That is, the propulsion devices 4L and 4R are not limited to jet propulsion devices, and may be other propulsion devices such as outboard motors.
- Automatic landing control may be executed in a predetermined low speed range. For example, it may be executed when the boat speed is equal to or lower than a predetermined set speed.
- the method of correcting the target position for landing may be changed. Alternatively, the correction of the target position may be omitted.
- the method for determining the second target position may be changed. That is, the method for determining the offset amount may be changed. Alternatively, the setting of the second target position may be omitted.
- the estimation method of disturbance may be changed. Alternatively, the estimation of disturbance may be omitted.
- the sensing device 46 is installed in the small vessel 1, but may be installed around the docking place in the marina. In this case, environmental information indicating the shape of the docking place, the shapes of all the moored ships, the shapes of the obstacles, and the shapes of the structures can be periodically acquired. Therefore, the server 51 can reflect the latest entrance / exit situation of the ship on the environment map.
- the environmental map acquired from the server 51 may not be used for automatic berthing control but may be used for normal manual boat maneuvering.
- the variable of the equation of motion of the hull 2 may be changed or added.
- the state variables of the equation of motion of the hull 2 are the actual longitudinal velocity Vx, the actual lateral velocity Vy, and the actual angular velocity ⁇ of the hull 2, but may be changed or added. May be.
- the state variable may be a variable indicating the position and posture of the hull 2 such as the position in the front-rear direction, the position in the left-right direction, the direction, the pitch angle, or the roll angle of the hull 2.
- the variables of the equation of motion are the actual engine speeds n1 and n2 and the actual steering angles ⁇ 1 and ⁇ 2, but may be increased or decreased according to the number of propulsion devices.
Landscapes
- Engineering & Computer Science (AREA)
- Ocean & Marine Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Mechanical Engineering (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Health & Medical Sciences (AREA)
- Public Health (AREA)
- Atmospheric Sciences (AREA)
- Environmental & Geological Engineering (AREA)
- Life Sciences & Earth Sciences (AREA)
- Automation & Control Theory (AREA)
- Navigation (AREA)
Abstract
ナビゲーションシステムは、センシングデバイスと、環境地図作成部とを備える。センシングデバイスは、着岸場所の形状を示す環境情報を生成する。環境地図作成部は、環境情報に基づいて、着岸場所の形状を示す環境地図を作成する。
Description
本発明は、ナビゲーションシステムに関する。
特許文献1には、目的地の経度及び緯度に基づいて出発地と目的地との間にコースを設定し、その設定したコースに従って大型船舶を自動操船する手法が開示されている。
しかし、特許文献1の手法では、自動操船によって目的地まで到達できるものの、目的地の着岸場所(桟橋及び岸壁など)がどのような形状であるかは分からない。そのため、目的地に近づいた際には、手動操船しながら着岸場所を目視で確認する必要がある。
本発明の課題は、船舶の着岸場所を案内できるナビゲーションシステムを提供することにある。
本発明に係るナビゲーションシステムは、センシングデバイスと、環境地図作成部とを備える。センシングデバイスは、着岸場所の形状を示す環境情報を生成する。環境地図作成部は、環境情報に基づいて、着岸場所の形状を示す環境地図を作成する。
本発明によれば、船舶の着岸場所を案内できるナビゲーションシステムを提供することができる。
以下、実施形態に係る小型船舶について図面を参照して説明する。図1は、実施形態に係る小型船舶1の平面図である。なお、図1では、小型船舶1の内部の構成の一部が示されている。図2は、小型船舶1の側面図である。本実施形態において、小型船舶1は、ジェット推進艇であり、ジェットボートまたはスポーツボートと呼ばれるタイプの船である。
小型船舶1は、船体2と、エンジン3L,3Rと、推進装置4L,4Rとを含む。船体2は、デッキ11とハル12とを含む。ハル12は、デッキ11の下方に配置されている。デッキ11には、運転席13と助手席17とが配置されている。
小型船舶1は、2つのエンジン3L,3Rと2つの推進装置4L,4Rとを有している。詳細には、小型船舶1は、第1エンジン3Lと第2エンジン3Rとを有している。小型船舶1は、第1推進装置4Lと第2推進装置4Rとを有している。ただし、エンジンの数は2つに限らず、1つであってもよく、或いは、3つ以上であってもよい。推進装置の数は2つに限らず、1つであってもよく、或いは、3つ以上であってもよい。
第1エンジン3Lと第2エンジン3Rとは、船体2に収容される。第1エンジン3Lの出力軸は、第1推進装置4Lに接続されている。第2エンジン3Rの出力軸は、第2推進装置4Rに接続されている。第1推進装置4Lは、第1エンジン3Lによって駆動され、船体2を移動させる推進力を発生させる。第2推進装置4Rは、第2エンジン3Rによって駆動され、船体2を移動させる推進力を発生させる。第1推進装置4Lと第2推進装置4Rは左右に並んで配置されている。
第1推進装置4Lは、船体2のまわりの水を吸い込んで噴射するジェット推進装置である。図3は、第1推進装置4Lの構成を示す側面図である。なお、図3においては第1推進装置4Lの一部が断面で示されている。
図3に示すように、第1推進装置4Lは、第1インペラシャフト21Lと、第1インペラ22Lと、第1インペラハウジング23Lと、第1ノズル24Lと、第1デフレクタ25Lと、第1リバースバケット26Lとを含む。第1インペラシャフト21Lは、前後方向に延びるように配置されている。第1インペラシャフト21Lの前部は、カップリング28Lを介してエンジン3Lの出力軸に接続されている。第1インペラシャフト21Lの後部は、第1インペラハウジング23L内に配置されている。第1インペラハウジング23Lは、水吸引部27Lの後方に配置されている。第1ノズル24Lは、第1インペラハウジング23Lの後方に配置されている。
第1インペラ22Lは、第1インペラシャフト21Lの後部に取り付けられている。第1インペラ22Lは、第1インペラハウジング23L内に配置されている。第1インペラ22Lは、第1インペラシャフト21Lとともに回転して、水吸引部27Lから水を吸引する。第1インペラ22Lは、吸引した水を第1ノズル24Lから後方に噴射させる。
第1デフレクタ25Lは、第1ノズル24Lの後方に配置されている。第1リバースバケット26Lは、第1デフレクタ25Lの後方に配置されている。第1デフレクタ25Lは、第1ノズル24Lからの水の噴射方向を左右方向に転換するように構成されている。すなわち、第1デフレクタ25Lの向きが左右方向に変更されることにより、小型船舶1の進行方向が左右に変更される。
第1リバースバケット26Lは、前進位置と後進位置とに切換可能に設けられている。第1リバースバケット26Lが前進位置では、第1ノズル24Lおよび第1デフレクタ25Lからの水は後方へ向けて噴射される。これにより、小型船舶1が前進する。第1リバースバケット26Lは、後進位置において、第1ノズル24Lおよび第1デフレクタ25Lからの水の噴射方向を前方に転換する。これにより、小型船舶1が後進する。
図示を省略するが、第2推進装置4Rは、第2インペラシャフトと、第2インペラと、第2インペラハウジングと、第2ノズルと、第2デフレクタと、第2リバースバケットとを含む。第2インペラシャフトと、第2インペラと、第2インペラハウジングと、第2ノズルと、第2デフレクタと、第2リバースバケットとは、それぞれ第1インペラシャフト21Lと、第1インペラ22Lと、第1インペラハウジング23Lと、第1ノズル24Lと、第1デフレクタ25Lと、第1リバースバケット26Lと同様の構成であり、詳細な説明を省略する。
次に、小型船舶1の操船機構、及び制御系に付いて説明する。図4は、小型船舶1の操船機構及び制御系を示す模式図である。図4に示すように、小型船舶1は、コントローラ41を備える。コントローラ41は、CPUなどの演算装置と、RAM,ROMなどの記憶装置とを備えており、小型船舶1を制御するようにプログラムされている。
小型船舶1は、第1ECU(Engine control unit)31Lと、第1ステアリングアクチュエータ32Lと、第1ステアリングCU(control unit)33Lと、第1シフトアクチュエータ34Lと、第1シフトCU(control unit)35Lとを有している。これらの構成は、第1推進装置4Lを制御するための装置である。第1ECU31L、第1ステアリングCU33L、第1シフトCU35Lは、それぞれCPUなどの演算装置と、RAM,ROMなどの記憶装置とを備えており、接続されている装置を制御するようにプログラムされている。
第1ECU31Lは、第1エンジン3Lと通信可能に接続されている。第1ECU31Lは、第1エンジン3Lに指令信号を出力する。
第1ステアリングアクチュエータ32Lは、第1推進装置4Lの第1デフレクタ25Lに接続されている。第1ステアリングアクチュエータ32Lは、第1デフレクタ25Lの舵角を変更する。第1ステアリングアクチュエータ32Lは、例えば電動モータである。第1ステアリングCU33Lは、第1ステアリングアクチュエータ32Lと通信可能に接続されている。第1ステアリングCU33Lは、第1ステアリングアクチュエータ32Lに指令信号を出力する。
第1シフトアクチュエータは、第1推進装置4Lの第1リバースバケット26Lに接続されている。第1シフトアクチュエータは、第1リバースバケット26Lの位置を前進位置と後進位置とに切り換える。第1シフトアクチュエータ34Lは、例えば電動モータである。第1シフトCU35Lは、第1シフトアクチュエータ34Lと通信可能に接続されている。第1シフトCU35Lは、第1シフトアクチュエータ34Lに指令信号を出力する。
小型船舶1は、第2ECU31Rと、第2ステアリングアクチュエータ32Rと、第2ステアリングCU33Rと、第2シフトアクチュエータ34Rと、第2シフトCU35Rとを有している。これらの構成は、第2推進装置4Rを制御するための装置であり、上述した第1ECU31Lと、第1ステアリングアクチュエータ32Lと、第1ステアリングCU33Lと、第1シフトアクチュエータ34Lと、第1シフトCU35Lと同様の構成である。
小型船舶1は、ステアリング装置14と、ジョイスティック42と、リモコンユニット15と、ディスプレイ43と、入力装置44と、位置センサ45と、センシングデバイス46と、送受信部50とを有している。ステアリング装置14と、ディスプレイ43と、入力装置44と、位置センサ45と、センシングデバイス46とは、コントローラ41、第1,第2ECU31L,31R、第1,第2ステアリングCU33L,33R、及び第1,第2シフトCU35L,35Rと互いに通信可能に接続されている。例えば、これらの装置は、CAN(Controller Area Network)、或いはCAN-FDによって互いに接続されている。
上記のように各装置が互いに接続されていることにより、各装置間での情報の伝達を同時に行うことができる。それにより、ステアリング、シフト、及びスロットルの協調制御を容易に行うことができる。また、これらの装置の接続は二重系統で構成されている。これにより、安定的な通信を確保することができる。
なお、リモコンユニット15は、コントローラ41とアナログ接続されている。しかし、リモコンユニット15も他の装置と同様にCAN等のネットワークによって接続されてもよい。
ステアリング装置14は、運転席13に配置される。ステアリング装置14は、例えばステアリングホイールを含む。ステアリング装置14は、船体2を操舵するために操作される。ステアリング装置14は、操作信号を出力する。第1ステアリングCU33L及び第2ステアリングCU33Rは、ステアリング操作装置14の操作に応じて第1,第2ステアリングアクチュエータ32L,32Rを制御する。これにより、小型船舶1の進行方向が左右に変更される。
リモコンユニット15は、運転席13に配置されている。リモコンユニット15は、エンジン3L,3Rの出力の調整、及び前後進の切換のために操作される。リモコンユニット15は、第1スロットル操作部材15Lと第2スロットル操作部材15Rとを有する。第1スロットル操作部材15Lと第2スロットル操作部材15Rとは、例えばレバー状の部材である。
リモコンユニット15は、第1,第2スロットル操作部材15L,15Rの操作量及び操作方向を示す信号を出力する。第1ECU31Lは、第1スロットル操作部材15Lの操作量に応じて、第1エンジン3Lの回転速度を制御する。第2ECU31Rは、第2スロットル操作部材15Rの操作量に応じて、第2エンジン3Rの回転速度を制御する。
第1シフトCU35Lは、第1スロットル操作部材15Lの操作方向に応じて、第1シフトアクチュエータ34Lを制御する。第2シフトCU35Rは、第2スロットル操作部材15Rの操作方向に応じて、第2シフトアクチュエータ34Rを制御する。これにより、小型船舶1の前後進が切り換えられる。
ジョイスティック42は、運転席13に配置される。ジョイスティック42は、船体2を前後左右に移動させるために操作される。また、ジョイスティック42は、船体2の方位を変更するために操作される。ジョイスティック42から操作信号はコントローラ41に入力される。コントローラ41は、ジョイスティック42の操作に応じて、第1,第2エンジン3L,3R、第1,第2ステアリングアクチュエータ32L,32R、第1,第2シフトアクチュエータ34Rを制御する。これにより、小型船舶1が前後左右に移動する。或いは、小型船舶1が旋回して方位が変更される。
ディスプレイ43及び入力装置44は、運転席13に配置されている。ディスプレイ43は、小型船舶1に関する情報を表示する。ディスプレイ43は、コントローラ41から表示信号を受信する。ディスプレイ43は、コントローラ41からの表示信号に応じて、情報を表示する。
入力装置44は、小型船舶に関する入力を受け付ける。入力装置44は、入力された情報を示す入力信号を出力する。入力装置44は、タッチパネルによってディスプレイ43と一体的に構成されてもよい。或いは、入力装置44は、ディスプレイ43と別体であってもよい。
位置センサ45は、船体2の現在位置と現在方位を検出し、現在位置と現在方位とを示す位置情報を出力する。位置センサ45は、例えば慣性航法装置であり、GNSS(Global Navigation Satellite System)装置47とIMU(Inertial Measurement Unit)48とを含む。GNSS装置47は、船体2の現在位置と船速とを検出する。IMU48は、船体2の角速度と加速度とを検出する。また、GNSS装置47とIMU48とによって、船体2の現在方位が検出される。なお、現在方位は、複数のGNSS装置、磁気方位センサ、或いは電子コンパスによって検出されてもよい。
センシングデバイス46は、レーダー、レーザー、カメラ、超音波センサのうちの1種類、或いは複数種類のセンサを含む。センシングデバイス46は、複数のレーダー、複数のレーザー、複数のカメラ、或いは複数の超音波センサを含んでもよい。レーダーは、例えば、ミリ波レーダー、マイクロ波レーダー、或いは波長の異なる他のレーダーを含む。センシングデバイス46は、環境情報を生成して出力する。
環境情報は、着岸場所の形状、着岸場所と船体2との位置関係、及び着岸場所周辺の物体(他船、構造物及び障害物など)を示す。環境情報は、例えば、センシングデバイス46が検出した物体の位置を示す点群の座標で示される。或いは、環境情報は、画像認識によって把握された物体の形状及び位置であってもよい。
図4に示すように、センシングデバイス46は、FPGA(field-programmable gate array)49などのPLD(programmable logic device)を介してCAN或いはCAN-FDに接続されてもよい。或いは、センシングデバイス46は、DSP(digital signal processor)を介してCAN或いはCAN-FDに接続されてもよい。
送受信部50は、船陸間通信回線を介して、サーバ51との間で情報を送受信することができる。船陸間通信回線には、携帯電話回線、Wi-Fi(登録商標)規格に準拠した無線LAN(Local Area Network)回線、PHS(Personal Handy-phone System)回線、及び国際海事衛星機構(INMARSAT)などの衛星通信回線などを用いることができる。
送受信部50は、後述する自動着岸制御の終了後、センシングデバイス46によって検出される環境情報と、位置センサ45から検出される自船の位置情報とをコントローラ41から取得する。送受信部50は、取得した環境情報と位置情報とをサーバ51に送信する。
サーバ51は、仮想サーバ(クラウドサーバ)又は物理サーバである。本実施形態において、サーバ51は、「環境地図作成部」の一例である。サーバ51は、小型船舶1だけでなく、小型船舶1以外の他船からも環境情報と位置情報とを収集する。サーバ51は、各船舶から収集した環境情報に基づいて、着岸場所の形状を示す環境地図を作成する。また、サーバ51は、収集した環境情報に基づいて、着岸場所周辺の障害物の形状、及び着岸場所周辺の構造物の形状を環境地図に示す。さらに、サーバ51は、各船舶から収集した位置情報に基づいて、着岸場所に係留されている各船舶の位置及び形状を環境地図に示す。サーバ51は、新たな環境情報と位置情報とを得るたびに、船舶、障害物及び構造物の形状を環境地図上で更新する。これにより、着岸場所の周辺環境が環境地図上で更新される。
送受信部50は、サーバ51に対して、環境地図の送信要求を送信する。送受信部50は、サーバ51が環境地図を保有している場合、サーバ51から環境地図を受信する。送受信部50は、サーバ51から受信した環境地図をコントローラ41に送信する。このサーバ51から取得された環境地図は、後述する自動着岸制御に利用される。
本実施形態において、コントローラ41、位置センサ45、センシングデバイス46、送受信部50及びサーバ51は、小型船舶1の着岸場所を案内するための「ナビゲーションシステム」を構成する。
小型船舶1は、自動着岸機能を有している。自動着岸機能は、操船者による操作無しで自動的に船体2を桟橋などの着岸位置に着岸させる機能である。以下、自動着岸機能において実行される自動着岸制御について詳細に説明する。図5~図8は、コントローラ41によって実行される自動着岸制御の処理を示すフローチャートである。
図5に示すように、ステップS101では、コントローラ41は、位置センサ45から位置情報を取得する。コントローラ41は、位置情報により、船体2の現在位置及び現在方位をリアルタイムに取得する。
ステップS102では、コントローラ41は、サーバ51から環境地図を取得したか否かを判定する。サーバ51から環境地図を取得しているとき、処理はステップS106に進む。サーバ51から環境地図を取得していないとき、処理はステップS103に進む。
ステップS103では、コントローラ41は、センシングデバイス46がセンシングの対象を捉えているかを判定する。センシングデバイス46が対象を捉えているときには、処理はステップS104に進む。
ステップS104では、コントローラ41は、センシングデバイス46により、着岸場所の形状、着岸場所と船体2との位置関係、着岸場所周辺の物体(他船、構造物及び障害物など)を示す環境情報を取得する。
ステップS105では、コントローラ41又はFPGA49は、環境情報に基づいて、着岸場所、他船、障害物、或いは周辺構造物を認識する。着岸場所は、例えば、桟橋である。コントローラ41又はFPGA49は、センシングデバイス46によって検出した物体の形状によって他船及び障害物を認識する。例えば、コントローラ41又はFPGA49は、センシングデバイス46によって検出した物体の高さ及び長さによって、着岸場所と周辺構造物とを認識する。
ステップS106では、コントローラ41は、周辺環境を示す環境地図をディスプレイ43上に表示する。図9は、自動着岸機能の操作画面61を示す図である。図9に示すように、操作画面61は、ディスプレイ43上にGUIによって表示される。操作画面61は、環境地図62と複数の操作キーとを含む。複数の操作キーが押されることで、自動着岸機能の各種の操作の入力が、入力装置44によって受け付けられる。
環境地図62には、着岸場所、障害物、及び周辺構造物の形状が示されている。また、図9では図示されていないが、コントローラ41によって認識された他船も環境地図62に示される。コントローラ41は、位置センサ45から取得する位置情報に基づいて、船体2の現在位置及び現在方位を船体2のアイコン71によって環境地図62上に示す。
環境地図62は、位置センサ45による位置情報及びセンシングデバイス46による環境情報の検出が繰り返されることで、リアルタイムに更新される。複数の操作キーは、尺度変更キー63を含む。尺度変更キー63が操作されることで、環境地図62の表示尺度が拡大或いは縮小される。
図6は、着岸の目標位置を設定するための処理を示すフローチャートである。図6に示すように、ステップS201では、コントローラ41は、着岸可能スペースを決定する。コントローラ41は、環境情報に基づいて着岸可能スペースを決定する。図10に示すように、コントローラ41は、着岸場所と認識した物体に沿う位置を着岸可能スペースSP1として決定する。例えば、コントローラ41は、環境情報から桟橋の配置を検出し、桟橋に沿った所定範囲を着岸可能スペースSP1として決定する。
また、コントローラ41は、環境情報から、着岸場所と、着岸場所に停泊中の他船の配置を検出し、着岸場所と他船との配置から着岸可能スペースSP1を決定する。図10に示すように、2つの他船201,202が間隔をおいて停泊しているときには、コントローラ41は、2つの他船201,202の間の距離d1を算出する。そして、コントローラ41は、2つの他船201,202の間の距離d1が、自船が停泊可能なスペースを示す閾値よりも大きいときには、2つの他船201,202の間のスペースを着岸可能スペースSP1として決定する。
ステップS202では、コントローラ41は、環境地図62上に着岸可能位置を表示する。着岸可能位置は、上述した着岸可能スペースSP1であってもよい。或いは、着岸可能位置は、着岸可能スペースSP1内の特定の位置であってもよい。着岸可能位置が表示される環境地図62は、図9に示すように俯瞰図であってもよい。或いは、カメラによって撮影された画像が、環境地図62として表示されてもよい。その場合、カメラによって撮影された画像上に、着岸可能位置が表示されてもよい。
ステップS203では、コントローラ41は、着岸の目標位置の入力の有無を判定する。ここでは、環境地図62における目標位置の入力が入力装置44によって受け付けられる。操作者が、環境地図62上の着岸可能位置をタッチすることにより、タッチされた位置が目標位置として入力される。入力装置44は、目標位置を示す目標位置情報をコントローラ41に出力する。
ステップS204では、コントローラ41は、入力された目標位置が適正範囲SP2内であるか判定する。入力された目標位置が適正範囲SP2内であるときには、処理はステップS205に進む。
ステップS205では、コントローラ41は、目標位置を補正する。コントローラ41は、着岸可能スペースSP1に基づいて目標位置を補正する。例えば、図10に示すように、入力された目標位置IP1が着岸可能スペースSP1外であるときには、目標位置が着岸可能スペースSP1内となるように、目標位置Tpを補正する。コントローラ41は、入力された目標位置IP2が着岸可能スペースSP1内であるときには、目標位置が着岸可能スペースSP1の中心位置となるように、目標位置Tpを補正する。
図9に示すように、操作画面61は、目標位置設定キー64を含む。目標位置設定キー64が押されると、操作者は、スペースSP1に限られない任意の位置をマニュアルで入力することができる。従って、タッチされた位置が目標位置として入力装置44に受け付けられる。この場合、着岸場所に沿う方向に対して垂直な方向に着岸場所から離れた位置が、目標位置として入力されたときには、コントローラ41は、着岸場所に沿う位置に目標位置を補正してもよい。このとき、図11に示すように、着岸場所に沿う位置の中で、入力された目標位置IP3から最も近い位置に目標位置Tpが補正されることが好ましい。
ステップS203において目標位置の入力が無かったときには、処理はステップS206に進む。例えば、環境地図62へのタッチが無いまま所定時間が経過したときには、処理はステップS206に進む。
ステップS206では、コントローラ41は、目標位置を自動設定する。ここでは、図12に示すように、コントローラ41は、着岸場所に沿う位置のうち、現在の船首方向の最近傍位置を目標位置として設定する。
ステップS207では、コントローラ41は、目標位置と目標方位とをアイコン71’で環境地図62上に表示する。ここでは、図9に示すように、コントローラ41は、ステップS205で補正された目標位置、又は、ステップ206で自動設定された目標位置を目標位置として、環境地図62上の当該位置に自船を示すアイコン71’を表示する。アイコン71’は、初期状態では、コントローラ41が決定した目標方位で表示される。コントローラ41は、着岸場所の形状、現在方位、或いは目標位置までの距離などに基づいて船体2の目標方位を決定する。例えば、着岸場所が桟橋であるときには、コントローラ41は、着岸場所の縁に沿った方向を目標方位として決定する。或いは、コントローラ41は、着岸場所の縁に沿った方向と所定角度をなす方向を目標方位として決定してもよい。また、コントローラ41は、現在方位、或いは目標位置までの距離に応じて、目標方位を変更してもよい。
図9に示すように、操作画面61は、第1方位変更キー65と第2方位変更キー66とを含む。第1方位変更キー65が一度押されるごとに、目標方位が所定角度ずつ(例えば90度ずつ)変更される。ただし、変更の単位角度は90度に限らず、90度より小さい、或いは90度より大きくてもよい。第2方位変更キー66は操作画面61上で回転可能に設けられている。第2方位変更キー66の回転に応じて目標方位が変更される。目標方位の変更に応じて、環境画面上の自船のアイコン71’の方位も変更される。
なお、ステップS204において入力された目標位置が適正範囲SP2内ではないときには、目標位置の補正は行われず、入力された目標位置が目標位置として設定される。例えば、図10に示すように、適正範囲SP2は、着岸可能スペースSP1を含む範囲である。入力された目標位置IP4が、適正範囲SP2外であるときには、目標位置の補正は行われない。従って、入力された目標位置IP4が、着岸可能スペースSP1から所定距離以上離れているときには、入力された目標位置が補正されずに目標位置として設定される。適正範囲SP2の大きさは、目標位置の入力がずれたのではなく、意図的に着岸可能スペースSP1から離れた位置にタッチされたと判断できる程度の値が設定される。
図9に示すように、操作画面61は、自動着岸モード開始ボタン67と自動着岸モード停止ボタン68とを含む。上述のように、目標位置が設定された後、操作者が自動着岸モード開始ボタン67を押すと、自動着岸制御が開始される。自動着岸制御が開始されると、コントローラ41は、目標位置に船体2を着岸させるよう推進装置4L,4Rを制御する指令信号を生成する。以下、自動着岸制御の開始後の処理について説明する。
図7に示すように、ステップS301では、コントローラ41は、自動着岸制御が開始されたかを判定する。自動着岸モード開始ボタン67が押されたときには、処理はステップS302に進む。ステップS302では、コントローラ41は、小型船舶1が第2目標位置に到達しているかを判定する。
図13に示すように、第2目標位置TP2は、上述したステップS201~S207で決定された目標位置及び目標方位を第1目標位置TP1として、第1目標位置TP1から小型船舶1の現在位置側に所定のオフセット量、離れた位置である。自動着岸制御では、コントローラ41は、まず小型船舶1を第2目標位置TP2に到達させるように推進装置4L,4Rを制御し、その後、小型船舶1を第1目標位置TP1に到達させるように推進装置4L,4Rを制御する。第2目標位置TP2については後述する。
ステップS302において、小型船舶1が第2目標位置TP2に到達していないときには、処理はステップS303に進む。ステップS303では、コントローラ41は、位置誤差と方位誤差とが第1閾値以下であるかを判定する。位置誤差は、船体2の現在位置と第2目標位置TP2との間の距離である。方位誤差は、船体2の現在方位と目標方位との差である。コントローラ41は、船体2の現在位置と第2目標位置TP2との間の距離が、第1位置閾値以下であり、且つ、船体2の現在方位と目標方位との差が、第1方位閾値以下であるときに、位置誤差と方位誤差とが第1閾値以下であると判定する。位置誤差と方位誤差とが第1閾値以下ではないときには、処理はステップS304に進む。
ステップS304では、コントローラ41は、第2目標位置TP2を決定する。図14に示すように、コントローラ41は、現在方位と目標方位との方位差を算出し、方位差に応じて第1目標位置TP1のオフセット量Lを決定する。コントローラ41は、第1目標位置TP1から現在位置側にオフセット量L、離れた位置を第2目標位置TP2として決定する。すなわち、コントローラ41は、着岸場所の縁に対して垂直な方向に、第1目標位置TP1からオフセット量L、離れた位置を第2目標位置TP2として決定する。詳細には、着岸場所が桟橋であるときには、コントローラ41は、以下の数1式によって、オフセット量を決定する。
[数1]
L=a×|Heading_err/90|+b+W
Lは、オフセット量である。aは所定の係数であり、船体2の重心と船首との間の距離に基づいて決定される。Heading_errは、図14に示すように、現在方位と第1目標方位との方位差である。ただし、Heading_err≧90度のときには、Heading_errは90度に設定される。bは、目標方位と着岸場所の縁に沿った方向に対しての船体2に応じた余裕度である。Wは他船の幅である。
[数1]
L=a×|Heading_err/90|+b+W
Lは、オフセット量である。aは所定の係数であり、船体2の重心と船首との間の距離に基づいて決定される。Heading_errは、図14に示すように、現在方位と第1目標方位との方位差である。ただし、Heading_err≧90度のときには、Heading_errは90度に設定される。bは、目標方位と着岸場所の縁に沿った方向に対しての船体2に応じた余裕度である。Wは他船の幅である。
すなわち、コントローラ41は、現在方位と目標方位との方位差、及び、船体2に応じた余裕度を算出する。コントローラ41は、方位差と、船体2に応じた余裕度とに応じて、第1目標位置TP1のオフセット量Lを決定する。
従って、コントローラ41は、方位差Heading_errの増大に応じてオフセット量Lを増大させる。コントローラ41は、船体2の重心と船首との間の距離に基づいてオフセット量を決定する。コントローラ41は、着岸場所に停泊している他船の幅Wよりも大きくなるように、オフセット量を決定する。オフセット量はリアルタイムに計算されて更新される。
なお、図13に示すように、第1目標位置TP1と現在位置との間に障害物X1があるときには、コントローラ41は、障害物を避けて第2目標位置TP2を決定する。詳細には、図15に示すように、環境地図62にはグリッドが設けられている。コントローラ41は、障害物X1から所定範囲内にあるグリッドを除いて、第2目標位置TP2を決定する。
また、コントローラ41は、第2目標位置TP2までの目標航行経路Ph1を決定する。コントローラ41は、設定されたグリッドを通る経路のうち、第2目標位置TP2までの最短経路を目標航行経路Ph1とする。このときも、障害物が存在するときには、コントローラ41は、障害物と認識した物体から所定範囲内にあるグリッドを除いて、目標航行経路Ph1を決定する。決定された目標航行経路Ph1は、環境地図62上に表示される。コントローラ41は、リアルタイムに目標航行経路Ph1を演算して更新する。
なお、船体2の現在位置と目標位置までの間に所定数のグリッドが配置されるように、グリッドの配置が設定される。従って、船体2と目標位置との間の距離が変更されると、グリッドの配置が変更される。
図7に示すように、ステップS305では、コントローラ41は、目標位置を第1目標位置TP1から第2目標位置TP2に変更する。
ステップS303において、位置誤差と方位誤差とが第1閾値以下であるときには、処理はステップS306に進む。すなわち、小型船舶1が完全には第2目標位置TP2に到達していなくても、現在位置が第2目標位置TP2に近く、且つ、現在方位が目標方位に近いときには、処理はステップS306に進む。
ステップS306では、コントローラ41は、目標位置と目標方位とから目標速度と目標角速度とを決定する。
小型船舶1が第2目標位置TP2から所定範囲内に到達していない(S303において“No”)ときには、コントローラ41は、第2目標位置TP2を目標位置として、目標速度と目標角速度とを決定する。小型船舶1が第2目標位置TP2から所定範囲内に到達している(S302又はS303において“Yes”)ときには、コントローラ41は、第1目標位置TP1を目標位置として、目標速度・角速度とを決定する。
図16に示すように、コントローラ41は、目標位置と現在位置、目標方位と現在方位とから、相対誤差Pb_errを算出し、相対誤差Pb_errに基づいて目標速度・角速度Vcを決定する。コントローラ41は、相対誤差Pb_errの減少に応じて、目標速度・角速度Vcを減少させる。すなわち、コントローラ41は、船体2の現在位置が目標位置に近づくと、目標速度を減少させる。コントローラ41は、船体2の現在方位が目標方位に近づくと、目標角速度を減少させる。そして、船体2の現在位置と目標位置との間の距離が0を含む所定範囲となると、コントローラ41は、目標速度を0とする。また、船体2の現在方位と目標方位との差が0を含む所定範囲となると、コントローラ41は、目標角速度を0とする。
相対誤差Pb_errは、第1位置誤差Pb_err_xと、第2位置誤差Pb_err_yと、方位誤差Pb_err_θとを含む。第1位置誤差Pb_err_xは、船体2の前後方向における目標位置と現在位置との間の距離である。第2位置誤差Pb_err_yは、船体2の左右方向における目標位置と現在位置との間の距離である。方位誤差Pb_err_θは、目標方位と現在方位との差である。
目標速度・角速度Vcは、第1目標速度Vc_xと、第2目標速度Vc_yと、目標角速度ωcとを含む。第1目標速度Vc_xは、船体2の前後方向における目標速度である。第2目標速度Vc_yは、船体2の左右方向における目標速度である。目標角速度ωcは、船体2の目標角速度である。
コントローラ41は、第1目標速度情報Ivcxと、第2目標速度情報Ivcyと、目標角速度情報Iωcとを記憶している。第1目標速度情報Ivcxは、第1位置誤差Pb_err_xと第1目標速度Vc_xとの関係を規定する。第2目標速度情報Ivcyは、第2位置誤差Pb_err_yと第2目標速度Vc_yとの関係を規定する。目標角速度情報Iωcは、方位誤差Pb_err_θと目標角速度ωcとの関係を規定する。これらの情報Ivcx-Iωcは、例えば、マップ、テーブル、数値計算、或いは式などによって表されてもよい。
コントローラ41は、第1目標速度情報Ivcxに基づいて、第1位置誤差Pb_err_xから第1目標速度Vc_xを決定する。コントローラ41は、第2目標速度情報Ivcyに基づいて、第2位置誤差Pb_err_yから第2目標速度Vc_yを決定する。コントローラ41は、目標角速度情報Iωcに基づいて、目標角速度ωcを決定する。
或いは、以下の数2式によって、目標速度・角速度Vcが決定されてもよい。入力としては、第1位置誤差Pb_err_x、第2位置誤差Pb_err_y、方位誤差Pb_err_θ、船体2の実際の前後方向の速度Vx、実際の左右方向の速度Vy、実際の角速度ωのいずれかが用いられてもよい。
[数2]

[数2]
図8に示すように、ステップS401において、コントローラ41は、現在位置から目標位置までの距離が所定の閾値Dt1以下であるかを判定する。目標位置までの距離が所定の閾値Dt1以下ではないときには、処理はステップS402に進む。ステップS402では、アプローチ制御によって船体2が制御される。アプローチ制御では、コントローラ41は、第1目標速度Vc_xと目標角速度ωcに基づいて、推進装置4L,4Rの目標推進力と目標舵角とを決定する。
ステップS401において現在位置から目標位置までの距離が所定の閾値Dt1以下であるときには、処理はステップS403に進む。ステップS403では、アジャスト制御によって船体2が制御される。アジャスト制御では、第1目標速度Vc_xと第2目標速度Vc_yと目標角速度ωcとに基づいて、推進装置4L,4Rの目標推進力と目標舵角とが決定される。
このように、目標位置までの距離が所定の閾値Dt1より大きいときには、アプローチ制御によって迅速に目標位置及び目標方位に到達することができる。また、目標位置までの距離が所定の閾値Dt1以下であるときには、アジャスト制御によって、精度良く目標位置に船体2を到達させることができる。
ステップS402及びステップS403では、コントローラ41は、外乱による力を算出し、外乱による力を考慮して、推進装置4L,4Rの目標推進力と目標舵角とを決定する。外乱による力とは、例えば潮流、或いは風による力である。なお、算出した結果には、重量変動等による船体への抵抗の変動も含まれる。詳細には、コントローラ41は、外乱による力と目標速度と目標角速度とに基づいて、目標推進力と目標舵角とを決定する。図17は、目標推進力と目標舵角とを決定するための制御ブロック図である。
図17に示すように、コントローラ41は、外乱オブザーバ411と、目標推進力・舵角演算部412と、を含む。外乱オブザーバ411は、船体2の実際の速度・角速度Vと、第1エンジン3Lの実際のエンジン回転速度n1と、第2エンジン3Rの実際のエンジン回転速度n2と、第1推進装置4Lの実際の舵角δ1と、第2推進装置4Rの実際の舵角δ2とに基づいて、外乱による力wを算出する。船体2の実際の速度・角速度Vは、船体2の実際の前後方向の速度Vxと、実際の左右方向の速度Vyと、実際の角速度ωとを含む。
目標推進力・舵角演算部412は、目標速度・角速度Vcと、実際の船体2の速度・角速度Vと、外乱による力wとに基づいて、目標推進力を算出する。コントローラ41は、以下の数3式によって、外乱による力wを推定する。
[数3]

 は、船体2の運動方程式である。
は、船体2の運動方程式である。
 は、Vの時間微分である。
は、Vの時間微分である。
 は、船体2の運動方程式による推定である。
は、船体2の運動方程式による推定である。
[数3]
コントローラ41は、以下の数4式に示す運動方程式により、例えばリアプノフの安定性理論に基づいて、目標推進力を算出する。
[数4]

[数4]
目標推進力・舵角演算部412は、目標推進力から、第1エンジン3Lの目標回転速度nc1と第2エンジン3Rの目標回転速度nc2とを決定する。コントローラ41は、第1エンジン3Lの目標回転速度nc1に相当する指令信号を生成して第1ECU31Lに出力する。コントローラ41は、第2エンジン3Rの目標回転速度nc2に相当する指令信号を生成して第2ECU31Rに出力する。
また、目標推進力・舵角演算部412は、目標速度・角速度Vcと、実際の船体2の速度・角速度Vと、外乱による力wとに基づいて、第1推進装置4Lの目標舵角δc1と第2推進装置4Rの目標舵角δc2とを決定する。コントローラ41は、第1推進装置4Lの目標舵角δc1に相当する指令信号を生成して第1ステアリングCU33Lに出力する。コントローラ41は、第2推進装置4Rの目標舵角δc2に相当する指令信号を生成して第2ステアリングCU33Rに出力する。
図8に示すように、ステップS404では、コントローラ41は、位置誤差及び方位誤差が第2閾値以下であるかを判定する。詳細には、コントローラ41は、船体2の現在位置と目標位置との間の距離が、第2位置閾値以下であり、船体2の現在方位と目標方位との差が、第2方位閾値以下であるときに、位置誤差と方位誤差とが第2閾値以下であると判定する。なお、第2位置閾値としては、上述したオフセット量よりも小さな値が設定される。
位置誤差と方位誤差とが第2閾値以下であるときには、コントローラ41は、自動着岸制御を終了する。なお、図9に示す自動着岸モード停止キー68が押されたときにも、コントローラ41は、自動着岸制御を終了する。
次に、図18を参照して、サーバ51への環境情報の送信処理について説明する。
ステップS501において、コントローラ41は、自動着岸制御が終了したか否かを判定する。自動着岸制御が終了していないとき、処理はステップS501を繰り返す。自動着岸制御が終了したとき、処理はステップS502に進む。
ステップS502において、コントローラ41は、着岸場所の形状及び周辺の物体(他船、構造物及び障害物など)を示す環境情報をセンシングデバイス46から取得し、自船の現在位置及び現在方位を示す位置情報を位置センサ45から取得する。
ステップS503において、コントローラ41は、送受信部50を介して、環境情報と位置情報とをサーバ51に送信する。
次に、図19を参照して、サーバ51における環境地図の作成処理について説明する。
ステップS601において、サーバ51は、小型船舶1を含む1以上の船舶から環境情報と位置情報を取得する。サーバ51は、位置の補正情報を用いて位置情報の精度を向上させてもよい。
ステップS602において、サーバ51は、各船舶から取得した環境情報に基づいて、着岸場所の形状を示す環境地図を作成する。図20は、船舶A,Bそれぞれから取得した環境情報に基づいて作成される環境地図の模式図である。
ステップS603において、サーバ51は、各船舶から取得した環境情報に基づいて、着岸場所周辺の物体(他船、構造物及び障害物など)の形状を環境地図に示す。図21は、着岸場所周辺の物体の形状が示された環境地図の模式図である。
ステップS604において、サーバ51は、各船舶から取得した位置情報に基づいて、着岸場所に係留されている各船舶の位置及び形状を環境地図に示す。図22は、船舶A,Bそれぞれの位置及び形状が示された環境地図の模式図である。
ステップS605において、サーバ51は、環境地図の送信要求を各船舶から受信した場合、環境地図を各船舶に送信する。各船舶において、環境地図は、上述のとおり自動着岸制御に利用することができるが、手動操船にも利用されうる。
以上説明したように、本実施形態に係るナビゲーションシステムでは、サーバ51が、センシングデバイス46によって生成される環境情報に基づいて、着岸場所の形状を示す環境地図を作成する。従って、操船者が環境地図を見て着岸場所(桟橋及び岸壁など)の形状を事前に確認できるため、速やかに船舶を係留することができる。
また、環境情報は、着岸場所周辺の物体の形状を示しており、サーバ51は、環境情報に基づいて、着岸場所周辺の物体の形状を環境地図に示す。従って、操船者が船舶を係留する際に、他船、構造物及び障害物などを事前に確認できるため、より速やかに船舶を係留することができる。
また、サーバ51は、小型船舶1の現在位置及び現在方位を示す位置情報に基づいて、小型船舶1の形状を環境地図に示す。従って、センシングデバイス46が小型船舶1に設置されている場合であっても、自船の形状をサーバ51の環境地図に示すことができる。
また、小型船舶1は、サーバ51から取得した環境地図を自動着岸制御に用いる。従って、センシングデバイス46による環境情報の検出を行う必要がないため、速やかに自動着岸制御を実行することができる。
以上、本発明の一実施形態について説明したが、本発明は上記実施形態に限定されるものではなく、発明の要旨を逸脱しない範囲で種々の変更が可能である。
小型船舶1は、ジェット推進艇に限らず、他の種類の小型船舶であってもよい。例えば、エンジン3L,3Rによって駆動されるプロペラを有する船外機を備える小型船舶であってもよい。すなわち、推進装置4L,4Rは、ジェット推進装置に限らず、船外機などの他の推進装置であってもよい。
自動着岸制御は、所定の低速域において実行されてもよい。例えば、船速が所定の設定速度以下であるときに実行されてもよい。
着岸の目標位置の補正方法が変更されてもよい。或いは、目標位置の補正が省略されてもよい。第2目標位置の決定方法が変更されてもよい。すなわち、オフセット量の決定方法が変更されてもよい。或いは、第2目標位置の設定が省略されてもよい。外乱の推定方法が変更されてもよい。或いは、外乱の推定が省略されてもよい。
センシングデバイス46は、小型船舶1に設置されることとしたが、マリーナ内の着岸場所周辺に設置されていてもよい。この場合には、着岸場所の形状、係留中のすべての船舶の形状、障害物の形状及び構造物の形状を示す環境情報を定期的に取得できる。そのため、サーバ51は、最新の船舶の出入り状況を環境地図に反映させることができる。
小型船舶1では、サーバ51から取得した環境地図を自動着岸制御に利用せず、通常の手動操船に利用してもよい。
船体2の運動方程式の変数が変更、或いは、追加されてもよい。例えば、上記の実施形態では、船体2の運動方程式の状態変数は、船体2の実際の前後方向の速度Vxと、実際の左右方向の速度Vyと、実際の角速度ωであるが、変更或いは追加されてもよい。例えば、状態変数は、船体2の前後方向の位置、左右方向の位置、方位、ピッチ角、或いはロール角など、船体2の位置及び姿勢を示す変数であればよい。上記の実施形態では、運動方程式の変数は、実際のエンジン回転速度n1,n2と、実際の舵角δ1,δ2であるが、推進装置の数に応じて増減してもよい。
本発明によれば、船舶の着岸場所を案内できるナビゲーションシステムを提供することができる。
Claims (6)
- 着岸場所の形状を示す環境情報を生成するセンシングデバイスと、
前記環境情報に基づいて、前記着岸場所の形状を示す環境地図を作成する環境地図作成部と、
を備えるナビゲーションシステム。 - 前記環境情報は、前記着岸場所周辺の物体の形状を示し、
前記環境地図作成部は、前記環境情報に基づいて、前記着岸場所周辺の物体の形状を前記環境地図に示す、
請求項1に記載のナビゲーションシステム。 - 前記センシングデバイスは、船舶に設置される、
請求項1又は2に記載のナビゲーションシステム。 - 前記センシングデバイスは、前記着岸場所に設置される、
請求項1又は2に記載のナビゲーションシステム。 - 前記船舶の現在位置及び現在方位を示す位置情報を生成する位置センサを備え、
前記環境地図作成部は、前記位置情報に基づいて、前記船舶の形状を前記環境地図に示す、
請求項4に記載のナビゲーションシステム。 - 前記船舶は、
船体と、
前記船体に配置され、前記船体を移動させる推進力を生成する推進装置と、
前記環境地図作成部から前記環境地図を受信する受信部と、
前記環境地図上に設定された着岸位置に向けて前記船体を移動させるように前記推進装置を制御する自動着岸制御を実行するコントローラと、
を有する請求項5に記載のナビゲーションシステム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US16/465,617 US11161576B2 (en) | 2016-12-02 | 2016-12-02 | Navigation system |
| PCT/JP2016/085987 WO2018100751A1 (ja) | 2016-12-02 | 2016-12-02 | ナビゲーションシステム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2016/085987 WO2018100751A1 (ja) | 2016-12-02 | 2016-12-02 | ナビゲーションシステム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2018100751A1 true WO2018100751A1 (ja) | 2018-06-07 |
Family
ID=62242078
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2016/085987 WO2018100751A1 (ja) | 2016-12-02 | 2016-12-02 | ナビゲーションシステム |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US11161576B2 (ja) |
| WO (1) | WO2018100751A1 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110415562A (zh) * | 2019-06-14 | 2019-11-05 | 青岛科技大学 | 一种受限水域冲突会遇船舶集群态势分析方法 |
| JP2020013339A (ja) * | 2018-07-18 | 2020-01-23 | 株式会社ハイテックシステム | 小型船舶運航管理システム、小型船舶用運航管理ユニットおよび小型船舶運航管理サーバ |
| JP2020059403A (ja) * | 2018-10-10 | 2020-04-16 | ヤンマー株式会社 | 自動着岸装置 |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11733699B2 (en) * | 2017-06-16 | 2023-08-22 | FLIR Belgium BVBA | Ultrasonic perimeter ranging sensor systems and methods |
| US11917337B2 (en) * | 2021-08-31 | 2024-02-27 | Xerox Corporation | System and method for selective image capture on sensor floating on the open sea |
| US20240118228A1 (en) * | 2022-10-07 | 2024-04-11 | Honda Motor Co., Ltd. | Accumulating and utilizing port information by sensor recognition |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06131600A (ja) * | 1992-03-27 | 1994-05-13 | Thomson Csf | 海上航法制御方法 |
| JP2010145339A (ja) * | 2008-12-22 | 2010-07-01 | Japan Radio Co Ltd | 目標検出装置 |
| JP2012528417A (ja) * | 2009-05-26 | 2012-11-12 | フィリップ グラセール | コンピュータ支援による船舶操縦方法 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3707717A (en) * | 1971-06-25 | 1972-12-26 | Gen Signal Corp | Boat berthing monitor incorporating sonar and doppler radar techniques |
| JPS589014A (ja) | 1981-06-09 | 1983-01-19 | テキサス・インスツルメンツ・インコ−ポレイテツド | 航海補助装置 |
| GB2388356B (en) * | 2000-12-01 | 2004-01-28 | Billy-Jay Smart | Vessel navigation and docking system and method |
| US7561886B1 (en) * | 2006-01-06 | 2009-07-14 | Brunswick Corporation | Method for determining the position of a marine vessel relative to a fixed location |
| GB2441802A (en) * | 2006-09-13 | 2008-03-19 | Marine & Remote Sensing Soluti | Safety system for a vehicle |
| WO2018100749A1 (ja) * | 2016-12-02 | 2018-06-07 | ヤマハ発動機株式会社 | 小型船舶及びその制御方法 |
-
2016
- 2016-12-02 US US16/465,617 patent/US11161576B2/en active Active
- 2016-12-02 WO PCT/JP2016/085987 patent/WO2018100751A1/ja active Application Filing
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06131600A (ja) * | 1992-03-27 | 1994-05-13 | Thomson Csf | 海上航法制御方法 |
| JP2010145339A (ja) * | 2008-12-22 | 2010-07-01 | Japan Radio Co Ltd | 目標検出装置 |
| JP2012528417A (ja) * | 2009-05-26 | 2012-11-12 | フィリップ グラセール | コンピュータ支援による船舶操縦方法 |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020013339A (ja) * | 2018-07-18 | 2020-01-23 | 株式会社ハイテックシステム | 小型船舶運航管理システム、小型船舶用運航管理ユニットおよび小型船舶運航管理サーバ |
| JP2020059403A (ja) * | 2018-10-10 | 2020-04-16 | ヤンマー株式会社 | 自動着岸装置 |
| WO2020075393A1 (ja) * | 2018-10-10 | 2020-04-16 | ヤンマー株式会社 | 自動着岸装置 |
| JP7083081B2 (ja) | 2018-10-10 | 2022-06-10 | ヤンマーパワーテクノロジー株式会社 | 自動着岸装置 |
| JP2022106753A (ja) * | 2018-10-10 | 2022-07-20 | ヤンマーパワーテクノロジー株式会社 | 自動着岸装置 |
| JP7336565B2 (ja) | 2018-10-10 | 2023-08-31 | ヤンマーパワーテクノロジー株式会社 | 自動着岸装置 |
| CN110415562A (zh) * | 2019-06-14 | 2019-11-05 | 青岛科技大学 | 一种受限水域冲突会遇船舶集群态势分析方法 |
| CN110415562B (zh) * | 2019-06-14 | 2021-03-02 | 青岛科技大学 | 一种受限水域冲突会遇船舶集群态势分析方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| US11161576B2 (en) | 2021-11-02 |
| US20210094659A1 (en) | 2021-04-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2018100751A1 (ja) | ナビゲーションシステム | |
| WO2018100748A1 (ja) | 小型船舶及びその制御方法 | |
| WO2018100749A1 (ja) | 小型船舶及びその制御方法 | |
| JP7336565B2 (ja) | 自動着岸装置 | |
| AU2022203742B2 (en) | An Automatic Location Placement System | |
| EP3210878B1 (en) | Vessel steering apparatus | |
| KR101409627B1 (ko) | 해양 선박의 제어와 관련된 개선 | |
| JP2018001945A (ja) | 船舶 | |
| KR20230011310A (ko) | 선박의 자동 유도 방법, 선박의 자동 유도 프로그램, 선박의 자동 유도 시스템 및 선박 | |
| JP6770471B2 (ja) | 小型船舶の操船アシストシステム | |
| JP7417538B2 (ja) | 制御目標生成装置及び操船制御装置 | |
| WO2018100747A1 (ja) | 小型船舶 | |
| WO2018100746A1 (ja) | 小型船舶及びその制御方法 | |
| WO2018100750A1 (ja) | 小型船舶 | |
| WO2018100745A1 (ja) | 小型船舶及びその制御方法 | |
| US11573087B1 (en) | Boat maneuvering control method for boat and boat maneuvering control system for boat | |
| US20220413499A1 (en) | Watercraft auto-docking system and watercraft auto-docking method | |
| JP7141777B1 (ja) | 自動着桟機能を有する一軸二舵船 | |
| KR102542896B1 (ko) | 자율 주행 보트, 자율 주행 시스템 및 자율 주행 시스템의 제어 방법 | |
| JP7145542B1 (ja) | 一軸二舵船の操舵角補正機能を有する操舵システム | |
| US20240124104A1 (en) | Marine vessel maneuvering system and marine vessel | |
| KR20240148353A (ko) | 자동 도킹 기능을 갖는 1축 2타선 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 16923027 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 16923027 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: JP |