WO2016047481A1 - Système de frein électrique - Google Patents
Système de frein électrique Download PDFInfo
- Publication number
- WO2016047481A1 WO2016047481A1 PCT/JP2015/075987 JP2015075987W WO2016047481A1 WO 2016047481 A1 WO2016047481 A1 WO 2016047481A1 JP 2015075987 W JP2015075987 W JP 2015075987W WO 2016047481 A1 WO2016047481 A1 WO 2016047481A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- electric brake
- electric
- power supply
- brake
- control amount
- Prior art date
Links
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T8/00—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force
- B60T8/17—Using electrical or electronic regulation means to control braking
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T13/00—Transmitting braking action from initiating means to ultimate brake actuator with power assistance or drive; Brake systems incorporating such transmitting means, e.g. air-pressure brake systems
- B60T13/74—Transmitting braking action from initiating means to ultimate brake actuator with power assistance or drive; Brake systems incorporating such transmitting means, e.g. air-pressure brake systems with electrical assistance or drive
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T17/00—Component parts, details, or accessories of power brake systems not covered by groups B60T8/00, B60T13/00 or B60T15/00, or presenting other characteristic features
- B60T17/18—Safety devices; Monitoring
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T8/00—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force
- B60T8/17—Using electrical or electronic regulation means to control braking
- B60T8/1755—Brake regulation specially adapted to control the stability of the vehicle, e.g. taking into account yaw rate or transverse acceleration in a curve
Definitions
- Patent Document 1 An electric linear actuator using a planetary roller screw mechanism.
- Patent Document 2 A technique for converting the rotational motion of a motor into a linear motion via a linear motion mechanism by depressing a brake pedal and applying a braking force by pressing a brake pad against a brake disc.
- the function of the electric brake device may be deteriorated due to an abnormality in the mechanical parts of the electric actuator or an abnormality in the power supply system. In this case, a desired braking force may not be generated.
- An object of the present invention is to provide an electric brake system that can supplement the braking force of the entire electric brake system when a part of the functions of the electric brake system is degraded.
- the electric brake system is an electric brake system including a plurality of electric brake devices DB, and each electric brake device DB is brought into contact with the brake rotor 8 and the brake rotor 8. And the friction member operating means 6 for bringing the friction member 9 into contact with the brake rotor 8, the electric motor 4 for driving the friction member operating means 6, and the friction member 9 being pressed against the brake rotor 8.
- a brake force estimating means 28 for obtaining an estimated value of the brake force; and a control device 2 for controlling the electric motor 4 so as to follow the brake force target value with respect to the brake force target value.
- the system further provides a brake estimated by the brake force estimating means 28 for each electric brake device DB.
- control amount error estimator 23 for estimating a control amount error which is a difference between the braking force in the absence of the depression
- the control amount error estimating unit 23 estimates that the control amount error has occurred
- the control amount error is equivalent to the brake force target value of the electric brake device DB other than the electric brake device in which the control amount error has occurred.
- a control amount complementing unit 29 that distributes and adds the braking force to be Is provided.
- the “friction member” is a concept including a brake lining, a brake pad, and the like.
- the deterioration in function means that an abnormality occurs in a mechanical part such as a bearing of the electric brake device DB, or an abnormality occurs in a power supply system of the electric brake device DB.
- the control amount complementing unit 29 is an electric brake device DB other than the electric brake device in which the control amount error has occurred, that is, a normal state.
- the brake force corresponding to the control amount error is distributed and added to the target brake force value of the electric brake device DB.
- the braking force can be supplemented by the entire electric brake system. Therefore, even if a functional deterioration occurs in a part of the electric brake system, a desired braking force can be generated as a whole vehicle.
- the control amount error estimator includes a braking force estimated by the brake estimating unit of the electric brake device in which the functional deterioration is detected by the diagnostic unit, and the braking force of the electric brake device in which the functional deterioration is not detected by the diagnostic unit. You may estimate the difference with the braking force estimated by the estimation means.
- the control amount error estimating unit 23 is A state quantity including a motor rotation angle of the electric motor; An operation amount including the voltage or current of the electric motor 4; A state transition matrix including an electric actuator inertia of an electric actuator including the electric motor 4 and the friction member operating means 6; The state transition formula Md representing the relationship with the control amount including the braking force may be used to acquire the braking force when there is no function deterioration. In this case, the control amount error can be obtained with high accuracy.
- the diagnosis unit 24 includes a power supply diagnosis unit that determines whether there is an abnormality in power supply from the power supply device 3, and the electric brake system further detects an abnormality in power supply from the power supply device 3 by the power supply diagnosis unit.
- the power supply switching means 21 may be provided to switch to power supply by the standby power supply 22 when it is determined that there is.
- the standby power supply 22 may be, for example, a small battery or a capacitor.
- the main power supply device 3 supplies power to the control device 2 and the electric motor 4 in normal times.
- the diagnosis unit 24 determines that there is an abnormality in the power supply from the power supply device 3 due to, for example, disconnection of the power supply harness
- the power supply switching unit 21 sends power from the main power supply device 3 to the standby power supply 22. Switch to supply. Therefore, redundancy of the entire electric brake system can be achieved.
- the power supply switching means 21 further includes power limiting means 32 for limiting the power supplied to the electric motor 4 when the power supply apparatus 3 switches from the power supply apparatus 3 to the power supply by the standby power supply apparatus 22.
- the error estimator 23 includes the braking force estimated by the brake force estimating unit 28 of the electric brake device DB whose power is limited by the power limiting unit 32, and the electric brake device DB of which the power is not limited by the power limiting unit 32.
- a control amount error that is a difference from the braking force estimated by the braking force estimation means 28 may be estimated.
- the power limiting means 32 can limit the power supplied to the electric motor 4 when switching from the power supply device 3 to the power supply by the standby power supply device 22, thereby making the entire electric brake system redundant.
- the power consumption can be reduced, and the power consumption of the vehicle can be improved.
- the control amount error estimation unit 23 is the difference between the braking force of the electric brake device DB that is power limited and the braking force of the electric brake device DB that is not power limited after achieving redundancy and improving power consumption in this way. Since the control amount error is estimated, fine control can be performed.
- a yaw moment calculating means 36 for obtaining a yaw moment generated in a vehicle equipped with the electric brake system is provided, and the control amount complementing unit 29 adds a brake force corresponding to the control amount error to the brake force target value.
- the control amount complementing unit 29 may determine the brake force addition value so that the yaw moment detected by the yaw moment calculating means 36 is not more than a predetermined value.
- the determined value is determined by a result of a test or a simulation, for example. In this case, even if a functional deterioration occurs in a part of the electric brake system, the braking force can be supplemented by the entire electric brake system for the reduced function, and the running stability of the vehicle can be improved.
- the electric brake system includes a plurality of electric brake devices DB, a power supply device 3, and a host ECU 18.
- Each electric brake device DB includes an electric actuator 1 and a control device 2. First, the electric actuator 1 will be described.
- the electric actuator 1 includes an electric motor 4, a speed reduction mechanism 5 that decelerates the rotation of the electric motor 4, a linear motion mechanism (conversion mechanism) 6, and a parking brake mechanism 7 that is a parking brake. And a brake rotor 8 and a brake lining (which is a friction member and also includes a brake pad) 9.
- the electric motor 4, the speed reduction mechanism 5, and the linear motion mechanism 6 are incorporated in, for example, a housing not shown.
- the electric motor 4 is composed of a three-phase synchronous motor or the like.
- the reduction mechanism 5 is a mechanism that reduces and transmits the rotation of the electric motor 4 to a tertiary gear 11 fixed to the rotary shaft 10, and includes a primary gear 12, an intermediate gear 13, and a tertiary gear 11.
- the speed reduction mechanism 5 decelerates the rotation of the primary gear 12 attached to the rotor shaft 4 a of the electric motor 4 by the intermediate gear 13 and is fixed to the end of the rotation shaft 10. Can be communicated to.
- the linear motion mechanism 6 which is a brake lining operation means (friction member operation means), converts the rotational motion output from the speed reduction mechanism 5 into the linear motion of the linear motion portion 14 by the feed screw mechanism and This is a mechanism for abutting or separating the brake lining 9.
- the linear motion part 14 is supported so as to be free of rotation and movable in the axial direction indicated by the arrow A1.
- a brake lining 9 is provided on the outboard side end of the linear motion portion 14.
- the outboard side is a state where the electric brake device DB is mounted on the vehicle, the outside of the vehicle is called the outboard side, and the center side of the vehicle is called the inboard side.
- FIG. 3 is a diagram schematically showing the parking brake mechanism in plan view.
- a plurality (six in this example) of locking holes 17 are formed on the end face of the intermediate gear 13 on the outboard side at regular intervals in the circumferential direction.
- Each locking hole 17 is formed in a long hole shape extending along the circumferential direction.
- the lock member 15 can be locked in any one of the locking holes 17.
- a linear solenoid is applied as the parking brake actuator 16 (FIG. 2).
- the locking member (solenoid pin) 15 is advanced by the parking brake actuator 16 (FIG. 2) and is engaged by being fitted into the bottomed cylindrical hole portion 17a of the engagement hole 17 formed in the intermediate gear 13,
- the parking lock state is established by prohibiting the rotation of the intermediate gear 13.
- a part or all of the lock member 15 is retracted to the parking brake actuator 16 (FIG. 2) and detached from the locking hole 17, thereby permitting the rotation of the intermediate gear 13 and bringing it into an unlocked state.
- the control device 2 of each electric brake device DB is supplied with one main power supply device 3 that supplies power to the control device 2 and the electric motor 4, and 1 is a high-order control means of each control device 2.
- Two host ECUs 18 are connected.
- an electric control unit that controls the entire vehicle is applied as the host ECU 18.
- the host ECU 18 outputs a braking force target value to each control device 2 of each electric brake device DB in accordance with, for example, the output of a sensor (not shown) that changes according to the amount of operation of a brake pedal (not shown).
- the distribution ratio of the braking force target value to each electric brake device DB may be, for example, a fixed value, and is based on information on in-vehicle sensors such as an acceleration sensor and vehicle motion and posture estimated from specifications of the mounted vehicle. It may be a variable value.
- Each control device 2 includes a calculator 19, a motor driver 20, power supply switching means 21, and a standby power supply device 22.
- the calculator 19 is a control calculation means 23 for controlling the brake force of the electric brake device DB to follow the brake force target value from the sensing information of the electric actuator 1 and information such as the brake force target value.
- the computing unit 19 may be composed of a processor such as a microcomputer or a hardware module such as an ASIC. That is, the control calculation unit 23, the diagnosis unit 24, and the operation control unit 25 are realized by executing a process described later by executing a software program with a processor, or by executing with a hardware module.
- the sensing information of the electric motor 4 in the electric actuator 1 includes a motor current value detected from the detection means (means for detecting current) 26, a motor angle estimated from the rotation angle estimation means 27, and the like.
- the detection means 26 may be, for example, a current sensor, and may estimate a motor current value from motor specifications such as an inductance value and a resistance value measured in advance and a motor voltage.
- the rotation angle estimating means 27 may be, for example, an angle sensor such as a magnetic encoder or a resolver, and may estimate the motor angle from the motor specifications and the motor voltage using a physical equation.
- the brake force of the electric brake device DB is estimated by the brake force estimating means 28.
- the brake force estimating means 28 is a means for estimating the brake force actually generated from the detected value obtained by sensing the influence of the electric brake device DB itself or the wheels generated by the operation of the electric brake device DB. . And this brake estimation means 28 can estimate the braking force which generate
- the brake force estimating means 28 may be constituted by, for example, a load sensor that detects the load of the electric actuator 1, and estimates the brake force from information such as a wheel speed sensor and an acceleration sensor of a vehicle equipped with the electric brake system. Alternatively, the braking force may be estimated from the characteristics of the electric actuator 1 and the sensing information of the electric motor 4 described above.
- a magnetic sensor is used as the load sensor.
- a load sensor including a magnetic sensor magnetically detects the reaction force of the braking force as an axial displacement amount.
- the brake force estimating means 28 sets the relationship between the reaction force of the brake force and the sensor output in advance through experiments or the like, so that the brake force is calculated based on the sensor output of the load sensor. Can be estimated.
- an optical type sensor other than the magnetic type, an eddy current type, or a capacitance type sensor can be applied.
- the motor driver 20 converts the DC power of the power supply device 3 into three-phase AC power used for driving the electric motor 4.
- the motor driver 20 may be, for example, a half bridge circuit using a field effect transistor (abbreviated as FET), a snubber capacitor, or the like.
- the standby power supply 22 is used when the power supply 3 is abnormal, and is, for example, a small battery or a capacitor.
- the diagnosis unit 24 of the arithmetic unit 19 includes a power supply diagnosis unit that determines whether there is an abnormality in the power supply from the power supply device 3.
- the power diagnosis unit determines not only an abnormality of the power supply device itself but also an abnormality such as disconnection of the power supply harness extending from the power supply device 3.
- the power supply switching means 21 is composed of, for example, a switching element, and switches to power supply by the standby power supply 22 when it is determined by the power supply diagnosis function of the diagnosis means 24 that there is an abnormality in the power supply from the power supply 3.
- FIG. 4 is a block diagram illustrating an example in which a control amount complementing unit 29 is provided in the host ECU 18 in the electric brake system.
- the control calculation means 23 (FIG. 1) of the calculator 19 in each control device 2 performs follow-up control in which the brake force is fed back to the brake force target value given from the host ECU 18 by the feedback controller 30.
- FIG. 4 an example of a series output feedback compensator is shown, but state feedback control or nonlinear switching control may be used.
- the control calculation means 23 (FIG. 1) of the calculator 19 also calculates the difference in brake force estimated by the brake force estimation means 28 with respect to the calculation result of the state transition model Md (state transition equation), that is, the control amount error. It also has a function as a control amount error estimator that outputs ⁇ y.
- the control amount error includes the braking force of the electric brake device DB in which the function deterioration is detected by the diagnosis unit 24 (FIG. 1), that is, the brake force estimated by the brake estimation unit, and the electric brake device DB in the case where the function deterioration is not detected. It is the difference with the braking force.
- the diagnostic means 24 (FIG. 1) of the computing unit 19 detects the functional degradation as described later.
- the control amount error ⁇ y may occur due to an influence within a slight error range such as a dimensional tolerance of the linear motion mechanism 6 or the electric motor 4 or assembly accuracy.
- the diagnostic means 24 (FIG. 1) may use a dead band, a filter, or the like in order to remove the influence within such an error range.
- the state transition model Md includes a model calculation value x ′ (k) of the state amount x (k) including the motor rotation angle of the electric motor 4, and An operation amount u (k) including the voltage or current of the electric motor 4, a state transition matrix A including the electric actuator inertia of the electric actuator including the electric motor 4 and the linear motion mechanism 6, and a control amount y (k including the braking force).
- the host ECU 18 includes each wheel brake force calculation unit 31 that calculates a brake force target value to be distributed to each electric brake device DB, and a control amount complementing unit 29.
- the control amount complementing unit 29 sets the braking force target value of the electric brake device DB other than the electric brake device DB in which the control amount error ⁇ y has occurred.
- a braking force corresponding to the control amount error ⁇ y is distributed and added.
- control amount complementing unit 29 first checks the control amount error ⁇ y of each electric brake device DB. Then, the control amount complementing unit 29 distributes and adds an addition value equal to the sum of the control amount errors ⁇ y of each electric brake device DB to the electric brake device DB in which the control amount error ⁇ y is smaller than a predetermined value. At that time, the distribution ratio of the brake force target value to each electric brake device DB may be equal.
- the predetermined value is determined, for example, by a result of a test or simulation.
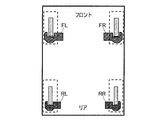
- FIG. 5 is a diagram showing a plan view of an electric brake system in which a plurality of electric brake devices are mounted on a vehicle
- FIG. 6 is a diagram showing a decrease in function of some electric brake devices in the electric brake system according to the present embodiment. It is a figure showing the relationship between time and braking force when it occurs. As shown in FIGS.
- the electric brake device RL disposed on the left rear wheel of the vehicle has a reduced function, and each brake force target value r FR , r FL , r RR , r RL
- operation examples that do not follow the braking force of the electric brake devices FR, FL, RR, and RL for the right front wheel, the left front wheel, the right rear wheel, and the left rear wheel, respectively, are shown.
- the other electric brake devices FR, FL, RR so as to complement and cancel out the control amount error ⁇ y RL generated in the electric brake device RL for the left rear wheel by the control amount complementing unit 29 (FIG. 4). Operates with a larger braking force than the respective braking force target values r FR , r FL , r RR .
- the function deterioration of the electric brake device DB is detected, and the brake force corresponding to the control amount error is added to the brake force target value of the normal electric brake device DB.
- the reduced braking force can be supplemented by the entire electric brake system. Therefore, a desired braking force can be generated even if a functional deterioration occurs in a part of the electric brake system.
- the main power supply device 3 supplies power to the control device 2 and the electric motor 4 respectively.
- the diagnosis unit 24 determines that there is an abnormality in the power supply from the power supply device 3 due to, for example, disconnection of the power supply harness
- the power supply switching unit 21 sends power from the main power supply device 3 to the standby power supply 22. Switch to supply. Therefore, redundancy of the entire electric brake system can be achieved.
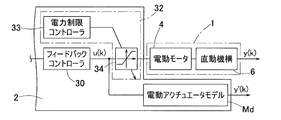
- FIG. 7 is a block diagram showing an electric brake system according to the second embodiment. This figure shows a configuration for limiting the power supplied to the electric motor when switching to the standby power supply.
- the power supply switching means 21 switches the power supply 3 (FIG. 1) to the power supply by the standby power supply 22 (FIG. 1)
- Power limiting means 32 is provided.
- a power limiting means 32 is provided in the computing unit 19 (FIG. 1).
- the power limiting unit 32 includes a power limiting controller 33 and a limiter circuit 34.
- the limiter circuit 34 can be switched between an active state and an inactive state by a signal from the power limit controller 33, and is always in an inactive state.
- the diagnosis unit 24 detects an abnormality in the power supply device 3 (FIG. 1) from the voltage change of the power supply device 3 (FIG. 1) and the result is received by the power limit controller 33, the power limit controller 33
- the circuit 34 is activated, and the output voltage is suppressed below the set voltage. Therefore, the power supplied to the electric motor 4 is limited.
- the power limit controller 33 may be configured to receive information from the host ECU 18 (FIG. 1) that an abnormality has occurred in the power supply device 3 (FIG. 1).
- the power limiting means 32 limits the power supplied to the electric motor 4 when the power supply device 3 (FIG. 1) is switched to the power supply by the standby power supply device 22 (FIG. 1).
- Overall redundancy can be achieved.
- the power consumption can be reduced, and the power consumption of the vehicle can be improved.
- the control amount error estimation unit controls the control amount error that is the difference between the braking force of the electric brake device that is power limited and the braking force of the electric brake device that is not power limited. Therefore, fine control can be performed.
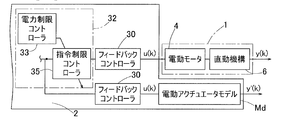
- FIG. 8 is a block diagram of the electric brake system according to the third embodiment. This figure shows a configuration for reducing power consumption in an electric brake system.
- the power limiting unit 32 in this example includes a power limiting controller 33 and a command limiting controller 35.
- the diagnosis unit 24 detects an abnormality of the power supply device 3 (FIG. 1) and the power limit controller 33 receives the result, the power limit controller 33 instructs the command limit controller 35 of the operating frequency of the electric brake device DB. Decrease or limit operation on the positive efficiency line. Thereby, power consumption can be reduced.
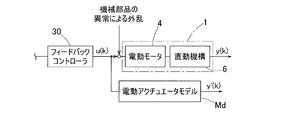
- FIG. 9 is a block diagram of an electric brake system according to the fourth embodiment.
- This figure is a block diagram showing a configuration corresponding to a case where a functional deterioration occurs due to an abnormality of a mechanical part of the electric brake device.
- the mechanical parts include bearings and gears in an electric brake device.
- the sliding resistance d increases due to such an abnormality of the machine part, and a control amount error occurs as an error of the motor torque.
- the control amount complementing unit 29 FIG. 4 adds the control amount error to the brake force target value of a normal electric brake device. Therefore, the braking force for the reduced function can be supplemented by the entire electric brake system.
- control amount complementing unit 29 is provided in the host ECU 18, but is not limited to this example.
- the control amount complementing unit 29 ⁇ / b> A may be provided in the control device 2 of each electric brake device DB.
- each control amount complementing unit 29A cooperates to calculate the sum of the control amount errors ⁇ y.
- a yaw moment calculating means 36 (FIG. 4) for obtaining a yaw moment generated in the vehicle is provided, and the control amount complementing unit 29 sets the brake force target value to the control amount error ⁇ y.
- the control amount complementing unit 29 determines the braking force addition value so that the yaw moment detected by the yaw moment calculating means 36 (FIG. 4) is not more than a predetermined value. Also good. In this case, even if a functional deterioration occurs in a part of the electric brake system, the braking force corresponding to the reduced function can be supplemented by the entire electric brake system, and the running stability of the vehicle can be improved.
- Either the left or right two wheels may be an electric brake device, and the rest may be a hydraulic brake device.
- the host ECU may be a VCU of a vehicle equipped with an electric brake system.
- the power supply device may be a low voltage battery or a DC / DC converter connected to the high voltage battery.
- the electric motor 4 may be, for example, a brushless DC motor or a DC motor using a brush, a slip ring, or the like.
- the linear motion mechanism may be a planetary roller screw, a ball ramp, or the like.
- the vehicle may be an electric vehicle in which driving wheels are driven by a motor, or a hybrid vehicle in which one of the front and rear wheels is driven by an engine and the other is driven by a motor. Further, an engine vehicle that drives a drive wheel only by an engine may be applied to the vehicle.
- the brake type may be a disc brake type or a drum brake type.
- Control device 4 Electric motor 6 .
- Linear motion mechanism (friction member operation means) 8 ...
- Brake rotor 9 ... Friction member 23 .
- Control calculation means (control amount error estimation unit) 29 ...
- Control amount complementing unit DB Electric brake device
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Braking Systems And Boosters (AREA)
- Valves And Accessory Devices For Braking Systems (AREA)
Abstract
La présente invention a pour but de fournir un système de frein électrique tel qu'une force de freinage, lorsqu'une partie du système de frein électrique fonctionne mal, peut être complétée par l'ensemble du système de frein électrique. Pour atteindre ce but, l'invention porte sur un système de frein électrique qui est pourvu : d'un moyen de diagnostic (24) pour détecter de mauvais fonctionnements dans des dispositifs de frein électrique (DB) ; d'un moyen de calcul de commande (23) pour estimer une erreur de quantité de commande, celle-ci étant la différence entre une force de freinage estimée par le moyen d'estimation de force de freinage (28) pour un dispositif de frein électrique (DB) qui est détecté comme fonctionnant mal par le moyen de diagnostic (24) et une force de freinage estimée par le moyen d'estimation de force de freinage (28) pour un dispositif de frein électrique (DB) qui n'est pas détecté comme fonctionnant mal par le moyen de diagnostic (24) ; d'une unité de complémentation de quantité de commande (29), qui ajoute, lorsqu'il est estimé par le moyen de calcul de commande (23) qu'il y a une erreur de quantité de commande, une force de freinage correspondant à l'erreur de quantité de commande à la valeur cible de force de freinage d'un dispositif de frein électrique (DB) autre que le dispositif de frein électrique dans lequel l'erreur de quantité de commande s'est produite.
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201580051363.0A CN106715216B (zh) | 2014-09-25 | 2015-09-14 | 电动制动系统 |
| EP15844226.9A EP3199416B1 (fr) | 2014-09-25 | 2015-09-14 | Système de frein électrique |
| US15/457,120 US10576952B2 (en) | 2014-09-25 | 2017-03-13 | Electric brake system |
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014195093 | 2014-09-25 | ||
| JP2014-195093 | 2014-09-25 | ||
| JP2015-175334 | 2015-09-07 | ||
| JP2015175334A JP6584877B2 (ja) | 2014-09-25 | 2015-09-07 | 電動ブレーキシステム |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US15/457,120 Continuation US10576952B2 (en) | 2014-09-25 | 2017-03-13 | Electric brake system |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2016047481A1 true WO2016047481A1 (fr) | 2016-03-31 |
Family
ID=55581008
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2015/075987 WO2016047481A1 (fr) | 2014-09-25 | 2015-09-14 | Système de frein électrique |
Country Status (1)
| Country | Link |
|---|---|
| WO (1) | WO2016047481A1 (fr) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018052068A1 (fr) * | 2016-09-15 | 2018-03-22 | Ntn株式会社 | Appareil de frein électrique |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11171006A (ja) * | 1997-12-11 | 1999-06-29 | Toyota Motor Corp | 電動式ブレーキ装置 |
| JP2007137182A (ja) * | 2005-11-16 | 2007-06-07 | Hitachi Ltd | 電動ブレーキシステム及びそれに用いる電動ブレーキ装置 |
-
2015
- 2015-09-14 WO PCT/JP2015/075987 patent/WO2016047481A1/fr active Application Filing
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11171006A (ja) * | 1997-12-11 | 1999-06-29 | Toyota Motor Corp | 電動式ブレーキ装置 |
| JP2007137182A (ja) * | 2005-11-16 | 2007-06-07 | Hitachi Ltd | 電動ブレーキシステム及びそれに用いる電動ブレーキ装置 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018052068A1 (fr) * | 2016-09-15 | 2018-03-22 | Ntn株式会社 | Appareil de frein électrique |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6584877B2 (ja) | 電動ブレーキシステム | |
| JP6054463B2 (ja) | 電動ブレーキシステム | |
| JP6313152B2 (ja) | 電動ブレーキ装置 | |
| WO2015072384A1 (fr) | Dispositif de commande de frein antiblocage | |
| WO2017026472A1 (fr) | Système de frein électrique | |
| EP3339121B1 (fr) | Dispositif de frein électrique | |
| WO2018139387A1 (fr) | Actionneur linéaire électrique et dispositif de freinage électrique | |
| US11001246B2 (en) | Electric brake device | |
| WO2016047481A1 (fr) | Système de frein électrique | |
| JP7117290B2 (ja) | 車両用ブレーキシステム | |
| JP6950251B2 (ja) | 車両の駆動システム | |
| JP6765265B2 (ja) | 電動ブレーキ装置 | |
| JP6513625B2 (ja) | 電動ブレーキシステム | |
| WO2017038759A1 (fr) | Dispositif d'entraînement de moteur de véhicule et véhicule sur lequel est monté ce dispositif | |
| JP2018172035A (ja) | 車両用ブレーキシステム | |
| JP6921197B2 (ja) | 車両用ブレーキシステム | |
| WO2019049971A1 (fr) | Actionneur électrique et dispositif de moteur électrique | |
| JP2018172033A (ja) | 車両用ブレーキシステム | |
| JP2018172032A (ja) | 車両用ブレーキシステム | |
| JP6906398B2 (ja) | 電動ブレーキ装置 | |
| JP2022103185A (ja) | 電動式直動アクチュエータおよび電動ブレーキ装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 15844226 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| REEP | Request for entry into the european phase |
Ref document number: 2015844226 Country of ref document: EP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2015844226 Country of ref document: EP |