WO2014136834A1 - 建設機械 - Google Patents
建設機械 Download PDFInfo
- Publication number
- WO2014136834A1 WO2014136834A1 PCT/JP2014/055624 JP2014055624W WO2014136834A1 WO 2014136834 A1 WO2014136834 A1 WO 2014136834A1 JP 2014055624 W JP2014055624 W JP 2014055624W WO 2014136834 A1 WO2014136834 A1 WO 2014136834A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- output
- engine
- work
- mode
- state
- Prior art date
Links
Images





Classifications
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/2058—Electric or electro-mechanical or mechanical control devices of vehicle sub-units
- E02F9/2062—Control of propulsion units
- E02F9/2075—Control of propulsion units of the hybrid type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
- B60W20/10—Controlling the power contribution of each of the prime movers to meet required power demand
- B60W20/11—Controlling the power contribution of each of the prime movers to meet required power demand using model predictive control [MPC] strategies, i.e. control methods based on models predicting performance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
- B60W20/10—Controlling the power contribution of each of the prime movers to meet required power demand
- B60W20/13—Controlling the power contribution of each of the prime movers to meet required power demand in order to stay within battery power input or output limits; in order to prevent overcharging or battery depletion
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S903/00—Hybrid electric vehicles, HEVS
- Y10S903/902—Prime movers comprising electrical and internal combustion motors
- Y10S903/903—Prime movers comprising electrical and internal combustion motors having energy storing means, e.g. battery, capacitor
Definitions
- the present invention relates to a construction machine such as a hydraulic excavator.
- construction machines such as hydraulic excavators have been mainly equipped with a hydraulic actuator that drives a hydraulic pump with an engine and drives a work machine with the power of the hydraulic pump.
- a generator motor for hydraulic pump assist that can generate power by the engine, and supplies power to drive the generator motor.
- a hybrid construction machine having an electricity storage device (capacitor, battery) that charges electric power generated by a generator motor has been developed and put into practical use.
- Patent Document 1 in a hybrid work machine including a hydraulic pump, an engine connected to be able to transmit power to the hydraulic pump, an electric motor connected to be able to drive the hydraulic pump independently of the engine, and a battery , Detecting a variable corresponding to the output state of the hybrid work machine, calculating an average value of the variable for a predetermined time set in advance, and setting the magnitude of the output of the engine according to the calculated average value
- the engine output is controlled in accordance with a parameter obtained by averaging the output state of the hybrid work machine. Therefore, the engine output can be gradually changed, and the engine operating state can be stabilized.
- work modes are mainly set by the driver manually using a switch or touch panel provided in the driver's cab, and fuel consumption is required for light loads such as leveling work.
- the conventional standard mode is usually selected.
- the specifications are such that the output of the hydraulic actuator (hereinafter referred to as work output) is suppressed to some extent with an emphasis on fuel efficiency, and in the standard mode, specifications that can make the most of the work output are often used. .
- FIG. 7 is a time chart showing the operation of the work mode, the pump output, and the battery charge amount.
- the horizontal axis indicates time
- the vertical axis indicates the work mode, hydraulic pump output, and battery charge selected in accordance with the driver's operation in order from the top.
- the output of the hydraulic pump is shown by being overlapped with a dotted line, and these outputs are shown as normalized values with the maximum output of the engine being 100%.
- the output of the hydraulic pump is generated.
- the engine output is set to about 90% and the average output of the hydraulic pump in the fuel priority mode is smaller than 90%.
- the output of the hydraulic pump is generated by the generator motor.
- the power generated by the generator motor is used.
- the output of the hydraulic pump is often smaller than the output of the engine, so the amount of charge of the battery increases due to the power generated by the generator motor.
- the output of the hydraulic pump is higher than before time t1.
- the charge amount of the battery is rapidly reduced by the power running power of the generator motor.
- the driver continues this operation and reaches time t2
- the charge amount of the battery reaches the lower limit value and exceeds the usable range, so that the power running output of the generator motor is suppressed in order to suppress a decrease in the charge amount of the battery. Is restricted and power assist is disabled. Therefore, after time t2, the output of the hydraulic pump as shown by the solid line in the figure cannot be obtained.
- the present invention has been made from the above-described prior art, and an object of the present invention is to provide a construction machine capable of suitably setting the magnitude of the engine output for each work mode.
- a construction machine includes an engine, a generator motor that can generate electric power by the engine, a hydraulic pump that can be driven by the engine and the generator motor, and power of the hydraulic pump.
- a hydraulic actuator for driving the work machine a power storage device for supplying power for driving the generator motor and charging the power generated by the generator motor, and a plurality of work modes according to the operation of the driver
- a work mode selection device that selects any one of the work modes, and an engine output setting unit that sets the output level of the engine according to the work mode selected by the work mode selection device,
- a history of the size of the work output output in the past is stored for each work mode, and the engine output setting unit is selected this time It said to reflect the size of the history of past work output for the same working mode as serial working mode, and sets the magnitude of the engine output in the current selected the working mode.
- the present invention can suitably set the magnitude of the engine output for each work mode selected according to the operation of the driver by providing the above configuration. Problems, configurations, and effects other than those described above will be clarified by the following description of embodiments.
- FIG. 1 is a side view of a hydraulic excavator according to an embodiment of the present invention.
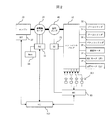
- FIG. 2 is a system configuration diagram of main electric and hydraulic equipment of the excavator shown in FIG. 1.
- FIG. 3 is a block diagram showing an electrical configuration of a control unit (HCU 100) shown in FIG.
- FIG. 3 is a control flowchart showing the processing contents of a control unit (HCU 100) shown in FIG. 2 is a time chart illustrating operations of a work mode, a pump output, and a battery charge amount in the hydraulic excavator illustrated in FIG. 1.
- FIG. 2 is a chart illustrating a method for determining a work mode selected according to a driver's operation and an embodiment thereof in the excavator shown in FIG. 1.
- 5 is a time chart showing operations of a work mode, a pump output, and a battery charge amount in a hydraulic excavator according to a conventional technique.
- FIG. 1 is a side view of a hydraulic excavator according to an embodiment of the present invention.
- a hydraulic excavator shown in FIG. 1 is mainly provided in a lower traveling body 10, an upper revolving body 20 that is turnably provided on the lower traveling body 10, a cab 5 and an upper revolving body 20, and a work machine 30 that performs various operations. And a hydraulic actuator that drives the work machine 30.
- the lower traveling body 10 includes a pair of crawlers 11 and a crawler frame 12, a pair of traveling hydraulic motors that independently drive and control each crawler 11, a speed reduction mechanism, and the like (not shown).
- the upper swing body 20 includes a swing frame 21, an engine 22 provided on the swing frame 21, a generator motor 23 that can generate electric power by the engine 22, a swing hydraulic motor (hereinafter referred to as a swing motor) 25, and a generator motor 23.
- a battery (electric storage device) 24 electrically connected to the motor, a speed reduction mechanism (not shown) that decelerates the rotation of the turning motor 25, and the upper turning body 20 (turning) with respect to the lower traveling body 10 by the driving force of the turning motor 25. It comprises a turning mechanism 26 for turning the frame 21).
- the work implement 30 mainly includes a boom 31, an arm 33 rotatably supported near the tip of the boom 31, and a bucket 35 rotatably supported near the tip of the arm 33. .
- the work machine 30 is driven by a hydraulic actuator. Specifically, the boom 31 is driven by the boom cylinder 32, the arm 33 is driven by the arm cylinder 34, and the bucket 35 is driven by the bucket cylinder 36.
- hydraulic pressure for driving hydraulic actuators such as a boom cylinder 32, an arm cylinder 34, a bucket cylinder 36, a swing motor 25, and a traveling hydraulic motor (not shown) is provided on the swing frame 21 of the upper swing body 20.
- the hydraulic pump 41 serving as a hydraulic source is driven by the engine 22 and the generator motor 23.
- the operator's cab 5 is operated by a driver such as a lever for operating the boom 31, the arm 33, the bucket 35, etc., and a switch (PWR mode switch 45, ECO mode switch 46) as a work mode selection device for selecting a work mode.
- a driver such as a lever for operating the boom 31, the arm 33, the bucket 35, etc.
- a switch PWR mode switch 45, ECO mode switch 46
- Various operating devices are provided (see FIG. 3).
- FIG. 2 is a system configuration diagram of main electric / hydraulic equipment of a hydraulic excavator according to an embodiment of the present invention.
- the power of the engine 22 is transmitted to the hydraulic pump 41 via the generator motor 23.
- the control valve 42 is hydraulic oil to the boom cylinder 32, the arm cylinder 34, the bucket cylinder 36, the turning motor 25, and the traveling hydraulic motors 13 and 14 in accordance with a command from the lever 201 operated by the driver. The amount and direction of discharge are controlled.
- DC power from the battery 24 is boosted to a predetermined DC voltage by a chopper or the like (not shown) in a power control unit 55 (hereinafter referred to as PCU), and an inverter (not shown) in the PCU 55 for driving the generator motor 23. Etc. Further, the battery 24 is charged and discharged depending on the driving state of the generator motor 23 (whether it is powering or regenerating).
- the hybrid control unit 100 (hereinafter referred to as “HCU”) is a rotational speed signal detected by the PCU 55, the engine control unit 57 (hereinafter referred to as “ECU”), and the machine control unit 80 (hereinafter referred to as “MCU”). Based on the lever signal, pressure signal, etc., commands are given to the PCU 55, ECU 57, and MCU 80, and the engine 22, generator motor 23, hydraulic pump 41, and control valve 42 are controlled in an integrated manner.
- ECU engine control unit 57
- MCU 80 machine control unit 80
- the MCU 80 controls the electromagnetic proportional valve 75 and transmits the power of the hydraulic pump 41 to the boom cylinder 32 by the control valve 42.
- the electromagnetic proportional valve 75 is a device that converts an electrical signal from the MCU 80 into a hydraulic signal.
- the HCU 100 estimates the power required for the hydraulic pump 41 based on the lever signal detected by the MCU 80, the pressure signal of the hydraulic pump 41, and the like, and stores the power of the battery 24 based on the voltage value of the battery 24 detected by the PCU 55. The remaining amount (hereinafter referred to as SOC) is estimated.
- the HCU 100 appropriately distributes the power required for the hydraulic pump 41 between the engine 22 and the generator motor 23, so that the engine rotation speed command and the generator motor output command are based on the estimated power of the hydraulic pump 41 and the SOC of the battery 24. And commands the ECU 57 and the PCU 55, respectively.
- the hydraulic pump 41 when the load of the hydraulic cylinder or the hydraulic motor becomes large and the hydraulic pump 41 is overloaded, the hydraulic pump 41 according to the rotation speed of the engine 24 to prevent the engine 22 from stalling.
- a command for limiting the motive power is output to the MCU 80.
- the MCU 80 controls the electromagnetic proportional valve 75 in accordance with a command from the HCU 100 and limits the power of the hydraulic pump 41.
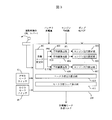
- FIG. 3 is a block diagram showing the electrical configuration of the HCU 100.
- the contents of the processing shown below are programmed in the HCU 100 and repeatedly executed at a predetermined cycle.
- the output of the generator motor 23 is defined as a positive value on the power running side and a negative value on the regeneration side (power generation side)
- the output of the battery 24 is defined as a positive value on the discharge side and a charge side. Define as a negative value.
- the HCU 100 mainly includes a work mode determination unit 401 that determines a work mode, and an average value calculation unit (work output calculation unit) 402, 404, and 406 that calculates an average value of outputs for each work mode. And engine output setting units 403, 405, and 407 for setting the magnitude of the engine output in accordance with the calculated values of the average value calculation units 402, 404, and 406.
- the HCU 100 detects a signal corresponding to the operation of the mode switches 45 and 46 and the lever operation amount by the driver, and the work mode determination unit 401 uses the standard mode (hereinafter referred to as PWR mode) or the fuel consumption priority mode (hereinafter referred to as ECO mode).
- PWR mode the standard mode
- ECO mode the fuel consumption priority mode
- the operation mode is determined.
- the HCU 100 detects the discharge pressure of the hydraulic pump 41 and calculates the output of the hydraulic pump 41 using the discharge flow rate of the hydraulic pump 41 estimated according to the lever operation amount of the driver. Further, the HCU 100 detects the rotational speed and torque of the engine 22 and calculates the output of the engine 22.
- the average value calculation unit 402 calculates the average value of the output in the PWR mode according to the output of the hydraulic pump 41.
- the engine output setting unit 403 sets the output (rotation speed in this embodiment) of the engine 22 according to the average value (calculated value) of the output in the PWR mode calculated by the average value calculation unit 402, and outputs the hydraulic pump 41. Accordingly, the target output of the generator motor 23 is set. Then, the target torque of the generator / motor 23 is calculated according to the set target output of the generator / motor 23 and the rotation speed of the engine 22, and the power generation is performed when the work mode determined by the work mode determination unit 401 is the PWR mode. The target torque of the machine motor 23 is transmitted to the PCU 55.
- the average value calculation unit 404 calculates the average value (calculated value) of the output in the ECO mode according to the output of the hydraulic pump 41.
- the engine output setting unit 405 sets the output of the engine 22 (rotation speed in the present embodiment) according to the average value of the output in the ECO mode calculated by the average value calculation unit 404, and generates power according to the output of the hydraulic pump 41.
- the target output of the machine motor 23 is set.
- the target torque of the generator / motor 23 is calculated according to the set target output of the generator / motor 23 and the rotation speed of the engine 22, and when the work mode determined by the work mode determination unit 401 is the ECO mode, The target torque of the machine motor 23 is transmitted to the PCU 55.
- the rotational speed is set as the target output of the engine 22, but torque may be set instead of the rotational speed.
- the average value calculation unit 406 and the engine output setting unit 407 use the average value calculation units 402 and 404 and the engine output setting unit 403, respectively. , 405 is executed.
- FIG. 4 is a control flowchart showing the processing contents of the HCU 100.
- FIG. 4 illustrates a case where there are two ECO modes and PWR modes as work modes.
- step 501 whether or not the current work mode is the ECO mode is determined by the work mode determination unit 401. If the determination is in the ECO mode, the process proceeds to step 502, and in the case other than the ECO mode (PWR mode). Proceeds to step 512.
- step 502 the work mode determination unit 401 determines whether or not the previous work mode is the PWR mode. If the PWR mode is selected, it is determined that the ECO mode is started, and the process proceeds to step 503. In the case of (ECO mode), it is determined that the ECO mode is being executed, and the process proceeds to step 505. In step 505, a process for incrementing a timer for measuring the working time in the ECO mode is performed. Next, the process proceeds to step 506, where the process of integrating the output of the hydraulic pump 41 is executed.
- step 507 the average value of the output of the hydraulic pump 41 is calculated by the average value calculation unit 404.
- the average value calculation unit 404 executes processing for dividing the integral value calculated in step 506 by the timer (corresponding to the working time in the ECO mode) calculated in step 505.
- the history of the average value of the output of the hydraulic pump 41 calculated in step 507 is stored in a storage area (for example, RAM) (not shown) of the HCU 100.
- step 503 when the ECO mode is started, an initialization process is executed to clear a timer for measuring the working time in the ECO mode and a value obtained by integrating the output of the hydraulic pump 41.
- Step 504 is a process of updating the average value of the output in the previous work mode, and details will be described later.
- step 512 the work mode determination unit 401 determines whether or not the previous work mode is the ECO mode. In the case of the ECO mode, it is determined that the PWR mode is started, and the process proceeds to step 513. In the case other than the ECO mode (PWR mode), it is determined that the PWR mode is being performed, and the process proceeds to step 515. In step 515, a process for incrementing a timer for measuring the working time in the PWR mode is performed. Next, the process proceeds to step 516, where the process of integrating the output of the hydraulic pump 41 is executed. Thereafter, in step 517, the average value of the output of the hydraulic pump 41 is calculated by the average value calculation unit 402. Specifically, the average value calculation unit 402 executes a process of dividing the integral value calculated in step 516 by the timer (corresponding to the working time in the PWR mode) calculated in step 515.
- step 513 when the PWR mode is started, an initialization process is executed to clear the value obtained by integrating the timer for measuring the work time in the PWR mode and the output of the hydraulic pump 41.
- Step 514 is a process of updating the average value of the output in the previous work mode, and details will be described later.
- Step 504 transitions from the previous ECO mode state (first state in which the first work mode is selected) to the PWR mode state (second state in which the second work mode is selected), Since this process is performed at the timing of transition to the current ECO mode state (third state in which the first work mode is selected from the second state), first, the engine output setting unit 405 first sets the previous ECO mode state. The average value of the output of the hydraulic pump 41 in the state (first state) is read, and the average value is set as a value for use in the current process.
- the engine output setting unit 405 is calculated in step 504 from the old average value set in the processing of the past step 504 in the state of the latest ECO mode. The process to update to the new average value is executed.
- the engine output setting unit 405 performs a process of setting the target output of the engine 22 in the current ECO mode according to the updated average value. That is, the process of reflecting the average value (Pave_eco) of the output of the hydraulic pump 41 in the ECO mode calculated in step 507 on the target output (Pe_eco) of the engine 22 in the ECO mode is executed. Specifically, the target output (Pe_eco) of the engine 22 is updated by the equation (1).
- Pe_eco_old is the target output of the engine 22 before update, and ⁇ (0 ⁇ ⁇ ⁇ 1) determines how much the average output value (Pave_eco) is reflected in the target output (Pe_eco) of the engine 22. It is a parameter.
- step 514 the state changed from the previous PWR mode state (first state in which the first work mode is selected) to the ECO mode state (second state in which the second work mode is selected).
- the engine output setting unit 403 first determines the previous PWR mode. The average value of the output of the hydraulic pump 41 in the mode state (first state) is read, and the average value is set as a value for use in the current process.
- the engine output setting unit 403 is calculated in step 514 from the old average value set in the process of the previous step 514 in the state of the latest PWR mode. The process to update to the new average value is executed.
- the engine output setting unit 403 performs processing for setting the target output of the engine 22 in the current PWR mode according to the updated average value. That is, in step 514, a process of reflecting the average value (Pave_pwr) of the output of the hydraulic pump 41 in the PWR mode calculated in step 517 on the target output (Pe_pwr) of the engine 22 in the PWR mode is executed. Specifically, the target output (Pe_pwr) of the engine 22 is updated by the equation (2).
- Pe_pwr Pave_pwr ⁇ ⁇ + Pe_pwr_old ⁇ (1- ⁇ ) (2)
- Pe_pwr_old is the target output of the engine 22 before update, and ⁇ (0 ⁇ ⁇ ⁇ 1) determines how much the average output value (Pave_pwr) is reflected in the target output (Pe_pwr) of the engine 22. It is a parameter.
- the average value of the parameters corresponding to the work output (for example, the output of the hydraulic pump 41) is calculated for each work mode corresponding to the operation of the driver.
- the output of the engine 22 can be set according to the average value for each work mode.
- step 521 the discharge flow rate (Q) of the hydraulic oil discharged from the hydraulic pump 41 is calculated according to the lever operation amount detected by the HCU 100.
- step 522 the discharge of the hydraulic pump 41 detected by the HCU 100 is calculated. Based on the pressure (P) and the discharge flow rate (Q) calculated in step 521, the output (Pp) of the hydraulic pump 41 is calculated according to equation (3).
- the motor target output calculation unit 410 responds to the output (Pp) of the hydraulic pump 41 calculated in step 522 and the engine target output (Pe_ref) set in the engine output setting units 403 and 405. Then, the target output (Pa_ref) of the generator motor is calculated according to the equation (4).
- Pe_ref Pe_pwr when the work mode determination unit 401 determines the PWR mode
- Pe_ref Pe_eco when the work mode determination unit 401 determines the ECO mode. Become.
- Pa_ref Pp-Pe_ref (4)
- step 524 based on the rotational speed (Na) of the generator motor 23 calculated according to the rotational speed of the engine 22 detected by the HCU 100 and the generator motor target output (Pa_ref) calculated in step 523, The motor target torque calculation unit 411 calculates the generator motor target torque (Ta_ref). And if the drive of the generator motor 23 is controlled based on the generator motor target torque (Ta_ref) calculated at step 524, the output of the engine 22 can be leveled according to the work mode.
- FIG. 5 is a time chart showing operations of the work mode, the pump output, and the battery charge amount.
- the horizontal axis of the figure indicates time, and the vertical axis indicates the work mode, the output of the hydraulic pump 41, and the charge amount of the battery 24, which are selected according to the driver's operation in order from the top.
- the output of the hydraulic pump 41 the output of the engine 22 is shown superimposed with a dotted line, and these outputs are shown as normalized values with the maximum output of the engine 22 being 100%.
- the output of the hydraulic pump 41 is generated.
- the output of the engine 22 is set to about 90% and the average output of the hydraulic pump 41 in the ECO mode is smaller than 90%.
- the driver selects the PWR mode to perform work from time t1 to time t3. Since the PWR mode is selected by the driver from time t1 to t3, the output of the hydraulic pump 41 is higher than before time t1, but in this embodiment, the hydraulic pump in the ECO mode until time t1 Since the average value of the output of 41 is not reflected in the output of the engine 22 in the PWR mode from the time t1 to the time t3, the output of the engine 22 is set to about 90% similarly to the time t1.
- the average value of the output of the hydraulic pump 41 in the ECO mode (the most recent ECO mode) up to time t1 becomes the output of the engine 22.
- the output of the engine 22 is slightly reduced from 90%.
- the difference in work according to the work mode selected by the driver is taken into consideration. That is, excess and deficiency between the output of the hydraulic pump 41 and the output of the engine 22 can be reduced. As a result, it is possible to suppress the output of the generator motor 23 and suppress the change in the charge amount of the battery 24. Accordingly, the chance that the amount of charge of the battery 24 exceeds the predetermined use range and restricts the output of the generator motor 23 is reduced, and a desired work output can be generated.
- the average value of the output of the hydraulic pump 41 is taken as an example of the average value of the parameter corresponding to the work output, but the output of the engine 22 is set according to the charge / discharge tendency of the battery 24.
- a method is also conceivable. For example, the difference (Ebfn) between the charge amount (Ebfn) of the battery 24 at the time t1 when the ECO mode is switched to the PWR mode by the driver's operation and the charge amount (Ebst) of the battery 24 at the time t0 when the operation in the ECO mode is started.
- the validity of the output setting of the engine 22 in the ECO mode can be determined.
- the engine output setting unit 405 determines the state of the PWR mode from the time t1 to the time t3 (the first state in which the first work mode is selected) from the time t0 to the time t1 (the first state in which the first work mode is selected). After the transition to the second state in which the second work mode is selected), at the timing of transition to the ECO mode state after the time t3 (the third state in which the first work mode is selected from the second state). In the process of step 504 (see FIG. 4) to be performed, not only the average value of the output of the hydraulic pump 41 from time t0 to time t1, but also the determination result of the charge / discharge tendency of the battery 24 during that time is reflected. The target output of the engine 22 in the ECO mode after t3 is set. By doing so, there is an effect that the output of the engine 22 is further leveled in the ECO mode performed after t3.
- step 514 not only the average value of the output of the hydraulic pump 41 but also the determination of the charge / discharge tendency of the battery 24 is determined.
- the target may be set for the engine 22 in the current PWR mode by reflecting the result.
- FIG. 6 is a chart showing a method for determining a work mode selected in accordance with a driver's operation and an example thereof.
- the work mode determination unit 401 performs the PWR mode determination.
- the work mode determination unit 401 determines a more subdivided work mode by determining a state of excavation or non-excavation in consideration of a change in output of the hydraulic pump 41 due to a difference in work. .
- the work mode determination unit 401 determines the work mode to be “A”. Based on this determination, the HCU 100 sets the output reference value of the engine 22 to 100%. Further, since the output of the hydraulic pump 41 is expected to be slightly lower than that in the excavation state in the non-excavation state, the work mode determination unit 401 determines the work mode to be “B”. Based on this determination, the HCU 100 sets the output reference value of the engine 22 to 80%.
- the work mode determination unit 401 performs the ECO mode determination.
- the work mode determination unit 401 is further subdivided by determining the state of excavation or non-excavation in consideration of the fluctuation of the output of the hydraulic pump 41 due to the difference in work as in the PWR mode determination. Determine the working mode.
- the work mode determination unit 401 determines the work mode to be “C”. Based on this determination, the HCU 100 sets the output reference value of the engine 22 to 90%. Further, since the output of the hydraulic pump 41 is expected to be slightly lower than that in the excavation state in the non-excavation state, the operation mode determination unit 401 determines the operation mode to be “D”. Based on this determination, the HCU 100 sets the output reference value of the engine 22 to 70%.
- FIG. Condition No. 1 indicates a case where the previous non-digging determination flag is on, that is, a non-digging state.
- the arm cloud (arm pulling) operation amount is not less than the predetermined value, and either the boom raising operation amount or the bucket cloud (bucket pulling) operation amount is not less than the predetermined value.
- the HCU 100 determines that the non-excavation determination flag is off, that is, is in the excavation state, and otherwise the determination of the non-excavation state is continued.
- Condition No. 2 shows a case where the previous non-excavation determination flag is off, that is, in an excavation state.
- the HCU 100 turns off the non-excavation determination flag, that is, continues the determination of the excavation state. In this case, the non-excavation determination flag is turned on and it is determined that the vehicle is in the non-excavation state.
- the state is determined by a combined operation of the work load and arm cloud (arm pull) and boom raising / bucket cloud (bucket pull) in the non-excavation state, and the work load and arm cloud are in the excavation state.
- the average value of the output of the hydraulic pump 41 is calculated for each work mode.
- the highest value among the output values of the hydraulic pump 41 That is, the mode value (corresponding to the calculated value of the present invention) may be calculated for each work mode.
- the engine output setting unit has described the configuration in which the target output of the engine 22 is set by reflecting the determination result of the charge / discharge tendency of the battery 24 in the average value of the output of the hydraulic pump 41.
- the engine output setting unit may set the target output of the engine 22 according to only the determination result of the charge / discharge tendency of the battery 24.
- the output of the engine 22 can be leveled for each work mode.
- the present invention can be applied to all types of construction machines as long as the construction machine is configured to drive a hydraulic pump with an engine and assist the engine with a motor.
- the present invention may be applied to a wheel loader or a crane.
Landscapes
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Mining & Mineral Resources (AREA)
- Civil Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Structural Engineering (AREA)
- Operation Control Of Excavators (AREA)
- Control Of Vehicle Engines Or Engines For Specific Uses (AREA)
- Power Engineering (AREA)
- Fluid-Pressure Circuits (AREA)
Abstract
Description
23…発電機モータ
24…バッテリ(蓄電デバイス)
30…作業機
32…ブームシリンダ(油圧アクチュエータ)
34…アームシリンダ(油圧アクチュエータ)
36…バケットシリンダ(油圧アクチュエータ)
41…油圧ポンプ
45…PWRモードスイッチ(作業モード選択装置)
46…ECOモードスイッチ(作業モード選択装置)
100…ハイブリッド・コントロール・ユニット(HCU)
401…作業モード判定部
402,404,406…平均値算出部(作業出力演算部)
403,405,407…エンジン出力設定部
Claims (6)
- エンジンと、
前記エンジンによって発電可能な発電機モータと、
前記エンジンおよび前記発電機モータによって駆動可能な油圧ポンプと、
前記油圧ポンプの動力で作業機を駆動操作する油圧アクチュエータと、
前記発電機モータを駆動する電力の供給および前記発電機モータで生成した電力の充電を行うための蓄電デバイスと、
運転者の操作に応じて複数の作業モードの中から何れかの作業モードを選択する作業モード選択装置と、
前記作業モード選択装置により選択された作業モードに応じて前記エンジンの出力の大きさを設定するエンジン出力設定部と、
を備え、
過去に出力された作業出力の大きさの履歴を前記作業モード毎に記憶し、
前記エンジン出力設定部は、今回選択された前記作業モードと同じ作業モードに対する前記過去の作業出力の大きさの履歴を反映させて、今回選択された前記作業モードにおける前記エンジン出力の大きさを設定することを特徴とする建設機械。 - 請求項1において、
前記作業モード毎の作業出力に相当するパラメータに基づいて、作業出力の演算を行う作業出力演算部をさらに備え、
前記エンジン出力設定部は、前記作業出力演算部で求めた演算値に応じて、前記作業モード毎に前記エンジンの出力の大きさを設定する
ことを特徴とする建設機械。 - 請求項1または2において、
前記エンジン出力設定部は、前記作業モード毎に前記蓄電デバイスの充放電傾向を判定し、その判定結果に応じて前記エンジンの出力の大きさを設定する
ことを特徴とする建設機械。 - 請求項2において、
前記エンジン出力設定部は、第1の作業モードを選択している第1の状態から第2の作業モードを選択する第2の状態に遷移した後、前記第2の状態から第1の作業モードを選択する第3の状態に遷移する際に、前記第1の状態における前記演算値に応じて前記第3の状態における前記エンジンの出力の大きさを設定する
ことを特徴とする建設機械。 - 請求項3において、
前記エンジン出力設定部は、第1の作業モードを選択している第1の状態から第2の作業モードを選択する第2の状態に遷移した後、前記第2の状態から第1の作業モードを選択する第3の状態に遷移する際に、前記第1の状態における前記蓄電デバイスの充放電傾向の判定結果に応じて前記第3の状態における前記エンジンの出力を設定する
ことを特徴とする建設機械。 - 請求項1において、
前記複数の作業モード毎に、さらに掘削作業または非掘削作業の状態の判定結果に基づいて前記エンジンの出力基準値をそれぞれ設定し、
前記エンジン出力設定部は、今回選択された前記作業モードと前記掘削作業または非掘削作業の状態の判定結果に基づいて設定した前記エンジンの出力基準値に、前記過去の作業出力の大きさの履歴を反映させて前記エンジン出力の大きさを設定することを特徴とする建設機械。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015504358A JP5997361B2 (ja) | 2013-03-06 | 2014-03-05 | 建設機械 |
| EP14761050.5A EP2966283B1 (en) | 2013-03-06 | 2014-03-05 | Construction machine |
| CN201480009405.XA CN104995386B (zh) | 2013-03-06 | 2014-03-05 | 工程机械 |
| KR1020157022133A KR101714948B1 (ko) | 2013-03-06 | 2014-03-05 | 건설 기계 |
| US14/762,959 US9822510B2 (en) | 2013-03-06 | 2014-03-05 | Construction machine |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013044320 | 2013-03-06 | ||
| JP2013-044320 | 2013-03-06 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2014136834A1 true WO2014136834A1 (ja) | 2014-09-12 |
Family
ID=51491343
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2014/055624 WO2014136834A1 (ja) | 2013-03-06 | 2014-03-05 | 建設機械 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US9822510B2 (ja) |
| EP (1) | EP2966283B1 (ja) |
| JP (1) | JP5997361B2 (ja) |
| KR (1) | KR101714948B1 (ja) |
| CN (1) | CN104995386B (ja) |
| WO (1) | WO2014136834A1 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020002848A (ja) * | 2018-06-27 | 2020-01-09 | 極東開発工業株式会社 | 車両用制御装置及び車両用制御装置を備えた作業車 |
| WO2020262428A1 (ja) | 2019-06-28 | 2020-12-30 | 株式会社クボタ | 作業機 |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6626371B2 (ja) * | 2016-02-29 | 2019-12-25 | 日立建機株式会社 | ハイブリッド作業機械 |
| DE102016111662A1 (de) * | 2016-06-24 | 2017-12-28 | Claas Selbstfahrende Erntemaschinen Gmbh | Landwirtschaftliche Arbeitsmaschine und Verfahren zum Betrieb einer landwirtschaftlichen Arbeitsmaschine |
| WO2018176041A1 (en) * | 2017-03-24 | 2018-09-27 | Sturman Digital Systems, Llc | Multiple engine block and multiple engine internal combustion power plants for both stationary and mobile applications |
| JP7152390B2 (ja) * | 2017-04-26 | 2022-10-12 | 住友建機株式会社 | ショベル、ショベル管理装置、及びショベル管理支援装置 |
| JP6902159B2 (ja) * | 2018-09-28 | 2021-07-14 | 株式会社日立建機ティエラ | 電動式建設機械 |
| US11739500B2 (en) * | 2020-07-29 | 2023-08-29 | Caterpilalr SARL | Machine configuration and control system enabling interchangeable power sources |
| CN113525345B (zh) * | 2021-07-30 | 2022-09-06 | 三一汽车起重机械有限公司 | 一种混合动力工程机械跛行控制方法、装置及起重机 |
| DE102021212458A1 (de) * | 2021-11-05 | 2023-05-11 | Zf Friedrichshafen Ag | Verfahren zum Betreiben eines Antriebsstranges einer Arbeitsmaschine |
| US11897474B1 (en) | 2023-04-25 | 2024-02-13 | Cnh Industrial America Llc | Fuel efficient operation mode |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09322312A (ja) * | 1996-03-26 | 1997-12-12 | Toyota Motor Corp | ハイブリッド車両の制御装置 |
| JP2007262978A (ja) | 2006-03-28 | 2007-10-11 | Shin Caterpillar Mitsubishi Ltd | ハイブリッド作業機械の出力制御装置及びハイブリッド作業機械の出力制御方法 |
| JP2010216419A (ja) * | 2009-03-18 | 2010-09-30 | Toyota Motor Corp | 内燃機関の制御装置 |
| JP2013040487A (ja) * | 2011-08-16 | 2013-02-28 | Hitachi Constr Mach Co Ltd | 作業機械 |
Family Cites Families (27)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2525233B2 (ja) * | 1988-12-19 | 1996-08-14 | 株式会社小松製作所 | 作業機のティ―チング・プレイバック方法 |
| JP3445167B2 (ja) * | 1998-09-03 | 2003-09-08 | 日立建機株式会社 | 油圧建設機械の油圧ポンプのトルク制御装置 |
| US6094617A (en) * | 1998-12-23 | 2000-07-25 | Caterpillar Inc. | Engine power monitoring system |
| US6772060B2 (en) * | 2001-10-25 | 2004-08-03 | Caterpillar Inc | Electronic engine control and method |
| US6920387B2 (en) * | 2001-12-06 | 2005-07-19 | Caterpillar Inc | Method and apparatus for parasitic load compensation |
| WO2005024208A1 (ja) * | 2003-09-02 | 2005-03-17 | Komatsu Ltd. | 作業車両用エンジンのパワー出力の制御方法及び制御装置 |
| US7774117B2 (en) * | 2003-10-31 | 2010-08-10 | Komatsu Ltd. | Engine output control via auto selection of engine output curve |
| WO2006043619A1 (ja) * | 2004-10-21 | 2006-04-27 | Komatsu Ltd. | 作業車両のエンジン出力制御装置及びエンジン出力制御方法 |
| US7373239B2 (en) * | 2005-07-06 | 2008-05-13 | Komatsu, Ltd. | Engine control device of work vehicle |
| JP4785522B2 (ja) * | 2005-12-22 | 2011-10-05 | 株式会社小松製作所 | 作業車両のエンジン制御装置 |
| WO2007080835A1 (ja) * | 2006-01-12 | 2007-07-19 | Hitachi Construction Machinery Co., Ltd. | 建設機械の点検履歴情報管理システム |
| US20070203670A1 (en) * | 2006-02-28 | 2007-08-30 | Caterpillar Inc. | System for automatic authorization and notification of transmitted data |
| JP4524679B2 (ja) * | 2006-03-15 | 2010-08-18 | コベルコ建機株式会社 | ハイブリッド建設機械 |
| US7962768B2 (en) * | 2007-02-28 | 2011-06-14 | Caterpillar Inc. | Machine system having task-adjusted economy modes |
| US7778756B2 (en) * | 2007-06-29 | 2010-08-17 | Vermeer Manufacturing Company | Track trencher propulsion system with load control |
| EP2090700A1 (en) * | 2008-02-15 | 2009-08-19 | Caterpillar Inc. | Machine power control with ratio increase |
| KR101112136B1 (ko) * | 2009-07-29 | 2012-02-22 | 볼보 컨스트럭션 이큅먼트 에이비 | 하이브리드식 건설기계의 제어시스템 및 방법 |
| JP5205408B2 (ja) * | 2010-03-24 | 2013-06-05 | 株式会社小松製作所 | 作業車両及び作業車両の制御方法 |
| JP5044727B2 (ja) * | 2010-05-17 | 2012-10-10 | 株式会社小松製作所 | 油圧ショベル及び油圧ショベルの制御方法 |
| JP5226734B2 (ja) * | 2010-05-20 | 2013-07-03 | 株式会社小松製作所 | ハイブリッド建設機械 |
| JP5226733B2 (ja) * | 2010-05-20 | 2013-07-03 | 株式会社小松製作所 | ハイブリッド建設機械およびハイブリッド建設機械の蓄電器容量計測方法 |
| JP5337220B2 (ja) * | 2011-09-29 | 2013-11-06 | 株式会社小松製作所 | 作業機械の表示装置および表示装置を搭載した作業機械 |
| JP5491561B2 (ja) * | 2012-03-26 | 2014-05-14 | 株式会社小松製作所 | 建設機械、及び建設機械の運転動作の良否報知方法 |
| US20130325293A1 (en) * | 2012-05-31 | 2013-12-05 | Caterpillar Inc. | System And Method For Controlling Engine Torque Load |
| CN104395537B (zh) * | 2012-06-22 | 2016-11-16 | 日立建机株式会社 | 工程机械 |
| JP5996314B2 (ja) * | 2012-07-24 | 2016-09-21 | 株式会社小松製作所 | ホイールローダおよびホイールローダのエンジン制御方法 |
| KR101950041B1 (ko) * | 2012-12-18 | 2019-04-22 | 두산인프라코어 주식회사 | 산업용 차량의 엔진 제어 방법 및 장치 |
-
2014
- 2014-03-05 WO PCT/JP2014/055624 patent/WO2014136834A1/ja active Application Filing
- 2014-03-05 KR KR1020157022133A patent/KR101714948B1/ko active IP Right Grant
- 2014-03-05 EP EP14761050.5A patent/EP2966283B1/en active Active
- 2014-03-05 CN CN201480009405.XA patent/CN104995386B/zh active Active
- 2014-03-05 JP JP2015504358A patent/JP5997361B2/ja active Active
- 2014-03-05 US US14/762,959 patent/US9822510B2/en active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09322312A (ja) * | 1996-03-26 | 1997-12-12 | Toyota Motor Corp | ハイブリッド車両の制御装置 |
| JP2007262978A (ja) | 2006-03-28 | 2007-10-11 | Shin Caterpillar Mitsubishi Ltd | ハイブリッド作業機械の出力制御装置及びハイブリッド作業機械の出力制御方法 |
| JP2010216419A (ja) * | 2009-03-18 | 2010-09-30 | Toyota Motor Corp | 内燃機関の制御装置 |
| JP2013040487A (ja) * | 2011-08-16 | 2013-02-28 | Hitachi Constr Mach Co Ltd | 作業機械 |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020002848A (ja) * | 2018-06-27 | 2020-01-09 | 極東開発工業株式会社 | 車両用制御装置及び車両用制御装置を備えた作業車 |
| JP7158917B2 (ja) | 2018-06-27 | 2022-10-24 | 極東開発工業株式会社 | 車両用制御装置及び車両用制御装置を備えた作業車 |
| WO2020262428A1 (ja) | 2019-06-28 | 2020-12-30 | 株式会社クボタ | 作業機 |
| US12031289B2 (en) | 2019-06-28 | 2024-07-09 | Kubota Corporation | Working machine |
Also Published As
| Publication number | Publication date |
|---|---|
| US9822510B2 (en) | 2017-11-21 |
| JP5997361B2 (ja) | 2016-09-28 |
| CN104995386B (zh) | 2017-09-26 |
| EP2966283A4 (en) | 2016-10-19 |
| EP2966283B1 (en) | 2017-11-15 |
| CN104995386A (zh) | 2015-10-21 |
| US20150354171A1 (en) | 2015-12-10 |
| JPWO2014136834A1 (ja) | 2017-02-16 |
| KR101714948B1 (ko) | 2017-03-09 |
| EP2966283A1 (en) | 2016-01-13 |
| KR20150108388A (ko) | 2015-09-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5997361B2 (ja) | 建設機械 | |
| EP2865812B1 (en) | Construction machine | |
| JP5562893B2 (ja) | ショベル | |
| US20130090835A1 (en) | Construction machine | |
| JP5974014B2 (ja) | ハイブリッド駆動式の油圧作業機械 | |
| JP6247552B2 (ja) | 建設機械の運転支援システム | |
| WO2015064507A1 (ja) | 作業機械 | |
| JP2010173599A (ja) | ハイブリッド式作業機械の制御方法、及びサーボ制御システムの制御方法 | |
| US10273656B2 (en) | Working machine with hydraulics | |
| JP6247617B2 (ja) | 建設機械 | |
| WO2019044468A1 (ja) | ハイブリッド作業機械 | |
| JP6243857B2 (ja) | ハイブリッド建設機械 | |
| CN103547743B (zh) | 混合式工作机械及其控制方法 | |
| JP6243856B2 (ja) | ハイブリッド建設機械 | |
| JP2017115454A (ja) | ハイブリッド式作業機械 | |
| JP2012233312A (ja) | ハイブリッド作業機械 | |
| JP5766075B2 (ja) | 作業機械の駆動制御装置 | |
| JP6232875B2 (ja) | ハイブリッド建設機械の動力制御装置 | |
| JP2015010454A (ja) | ハイブリッド作業機械 | |
| KR101998379B1 (ko) | 하이브리드 쇼벨 및 하이브리드 쇼벨의 제어방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 14761050 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2015504358 Country of ref document: JP Kind code of ref document: A |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 14762959 Country of ref document: US |
|
| ENP | Entry into the national phase |
Ref document number: 20157022133 Country of ref document: KR Kind code of ref document: A |
|
| REEP | Request for entry into the european phase |
Ref document number: 2014761050 Country of ref document: EP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2014761050 Country of ref document: EP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |