WO2014122706A1 - ハンドオーバ失敗検出装置、ハンドオーバ・パラメータ調整装置、及びハンドオーバ最適化システム - Google Patents
ハンドオーバ失敗検出装置、ハンドオーバ・パラメータ調整装置、及びハンドオーバ最適化システム Download PDFInfo
- Publication number
- WO2014122706A1 WO2014122706A1 PCT/JP2013/006692 JP2013006692W WO2014122706A1 WO 2014122706 A1 WO2014122706 A1 WO 2014122706A1 JP 2013006692 W JP2013006692 W JP 2013006692W WO 2014122706 A1 WO2014122706 A1 WO 2014122706A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- handover
- cell
- base station
- mobile terminal
- connection
- Prior art date
Links
Images



















Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W36/00—Hand-off or reselection arrangements
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W76/00—Connection management
- H04W76/10—Connection setup
- H04W76/19—Connection re-establishment
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W36/00—Hand-off or reselection arrangements
- H04W36/0005—Control or signalling for completing the hand-off
- H04W36/0055—Transmission or use of information for re-establishing the radio link
- H04W36/0079—Transmission or use of information for re-establishing the radio link in case of hand-off failure or rejection
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W36/00—Hand-off or reselection arrangements
- H04W36/0005—Control or signalling for completing the hand-off
- H04W36/0055—Transmission or use of information for re-establishing the radio link
- H04W36/0058—Transmission of hand-off measurement information, e.g. measurement reports
Abstract
Description
PS+OS<PT+OT (1)
・Failure Cell ID:接続障害の発生前に移動端末が接続していたセルの識別子(Physical Cell Identity(PCI))、
・Reestablishment Cell ID:移動端末が接続再確立を試行したセルの識別子(E-UTRAN Cell Global Identifier(ECGI))、及び
・C-RNTI:接続障害の発生前に移動端末が接続していたセルにおける移動端末の識別子(C-RNTI)。
・検出したハンドオーバ失敗の種別(すなわち、Too Early Handover 又はHandover to Wrong Cell)、
・ソースセル及びターゲットセルの識別子(ECGI)、
・接続再確立が試行されたセル(Handover to Wrong Cellの場合)、及び
・Handover cause(handover preparation中にソースセルの基地局から通知された内容)。
ソースセルの基地局は、ターゲットセル (ハンドオーバが開始されている場合)、又はソースセルとは異なるセル(ハンドオーバが開始されていない場合)からRLF INDICATIONメッセージを受信したことに応じてToo Late Handoverを検出することができる。
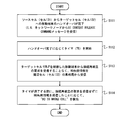
ターゲットセルの基地局は、移動端末の内向き(incoming)ハンドオーバが完了した後(つまり、UE CONTEXT RELEASEメッセージを送信した後)の所定期間(Tstore_UE_cntxt)内に、又は当該移動端末に関してハンドオーバの準備がされている間に、当該移動端末に関するRLF INDICATIONメッセージをソースセルから受信したことに応じてToo Early Handoverを検出できる。また、ソースセルの基地局は、Too Early Handoverを示すHANDOVER REPORTメッセージをターゲットセルの基地局から受信することによってToo Early Handoverを検出することができる。
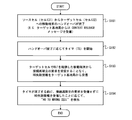
ターゲットセルの基地局は、移動端末の内向き(incoming)ハンドオーバが完了した後(つまり、UE CONTEXT RELEASEメッセージを送信した後)の所定期間(Tstore_UE_cntxt)内に、又は当該移動端末に関してハンドオーバの準備がされている間に、当該移動端末に関するRLF INDICATIONメッセージをソースセルとは異なるセルから受信したことに応じてHandover to Wrong Cellを検出できる。また、ソースセルの基地局は、Handover to Wrong Cellを示すHANDOVER REPORTメッセージをターゲットセル基地局から受信することによってHandover to Wrong Cellを検出することができる。
図1は、本実施形態を含む幾つかの実施形態に係る無線通信システム100の構成例を示すブロック図である。無線通信システム100は、複数の基地局111~113を含む。基地局111~113は、セル131~133をそれぞれ管理し、1又は複数の移動端末(例えば移動端末101)と通信する。移動端末101は、基地局111~113のいずれにも接続できる。なお、図1の構成例は、説明のための一例に過ぎないから、適宜変更されてもよい。例えば、無線通信システム100は、4つ以上の基地局を含んでもよい。また、図1に示されたセル131~133の隣接関係も一例に過ぎない。例えば、無線通信システム100は、あるセル(例えばセル132)が他のセル(例えばセル133)内に配置された階層化セル構造を有してもよい。
(a)ソースセル131からターゲットセル132への移動端末101の第1のハンドオーバに関して、ソース基地局111が移動端末101から受信するハンドオーバ指示の肯定応答の有無、及び
(b)当該第1のハンドオーバの開始後に発生する移動端末101からソース基地局111に対する接続再確立の要求の有無。
(a)ソースセル131からターゲットセル132への移動端末101の第1のハンドオーバに関して、ソース基地局111が移動端末101から受信するハンドオーバ指示の肯定応答の有無、及び
(b)当該第1のハンドオーバの開始後に発生する移動端末101からソース基地局111に対する接続再確立の要求の有無。
本実施形態では、ソースセル131からターゲットセル132へのハンドオーバに関するToo Late Handoverの検出について説明する。本実施形態に係る無線通信システム100の構成例は図1と同様である。図2は、Too Late Handoverが発生する状況を示している。なお、図2は、ソース基地局111とターゲット基地局112の間で情報(例えば、HANDOVER REPORTメッセージ及びRLF INDICATIONメッセージ)を送受できない状況を想定している。この状況は、例えば、ソース基地局111及びターゲット基地局112の間の基地局間インタフェース(例えば、X2インタフェース)が使用できない状況に対応する。
本実施形態では、ソースセル131からターゲットセル132へのハンドオーバに関するToo Early Handoverの検出について説明する。本実施形態に係る無線通信システム100の構成例は図1と同様である。図6は、Too Early Handoverが発生する状況を示している。Too Early Handoverは、ハンドオーバ手順の実行中又はハンドオーバの完了直後にターゲットセル132(基地局112)でのRLFを経験した移動端末101がソースセル131(基地局111)に接続再確立を試みる状況に対応する。なお、図6は、ソース基地局111とターゲット基地局112の間で情報(例えば、HANDOVER REPORTメッセージ及びRLF INDICATIONメッセージ)を送受できない状況を想定している。この状況は、例えば、ソース基地局111及びターゲット基地局112の間の基地局間インタフェース(例えば、X2インタフェース)が使用できない状況に対応する。
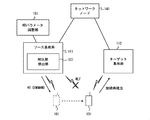
本実施形態では、ソースセル131からターゲットセル132へのハンドオーバに関するHandover to Wrong Cellの検出について説明する。本実施形態に係る無線通信システム100の構成例は図1と同様である。図12は、Handover to Wrong Cellが発生する状況を示している。なお、図12は、ターゲット基地局112が他の2つの基地局(すなわち、ソース基地局111及び周辺基地局113)との間で情報(例えば、HANDOVER REPORTメッセージ及びRLF INDICATIONメッセージ)を送受できない状況を想定している。一方、ソース基地局111は、周辺基地局113と通信可能であり、周辺基地局113からハンドオーバ(HO)失敗情報を受信する。HO失敗情報は、ソース基地局111と周辺基地局113の間の基地局間インタフェース(例えば、X2インタフェース)によって送信されてもよいし、ネットワーク140を介して送信されてもよい。
・ハンドオーバ失敗のソースセル(すなわちセル131)の識別子(例えば、PCI)、
・ハンドオーバ失敗のターゲットセル(すなわちセル132)の識別子(例えば、PCI)、
・ターゲットセルでのRLF後に移動端末101が接続再確立を試行したセル(すなわちセル133)の識別子(例えば、PCI)、及び
・ターゲットセルでのRLFを経験した移動端末101の識別子(例えばC-RNTI)。
なお、これらのセルのECGIを特定できる場合には、PCIの代わりにECGIを含めてソース基地局111に通知してもよい。
本実施形態では、ソースセル131からターゲットセル132へのハンドオーバに関するHandover to Wrong Cellの検出について説明する。なお、上述した第4の実施形態では、ターゲット基地局112が他の2つの基地局(ソース基地局111、周辺基地局113)との間で情報送受不能である例を示した。これに対して、本実施形態は、周辺基地局113が他の2つの基地局(ソース基地局111、ターゲット基地局112)との間で情報送受不能である例について説明する。本実施形態に係る無線通信システム100の構成例は図1と同様とすればよい。
・ハンドオーバ失敗のソースセル(すなわちセル131)の識別子(例えば、PCI)、
・ハンドオーバ失敗のターゲットセル(すなわちセル132)の識別子(例えば、PCI)、
・ターゲットセルでのRLF後に移動端末101が接続再確立を試行するセル(すなわちセル133)の識別子(例えば、PCI)、及び
・ターゲットセルでのRLFを経験した移動端末101の識別子(例えばC-RNTI)。
なお、これらのセルのECGIを特定できる場合には、PCIの代わりにECGIを含めてソース基地局111に通知してもよい。
Qs < Q_th1 かつ Qn > Q_th2 (2)
ここで、Q_th1はQsに対する閾値であり、Q_th2はQnに対する閾値である。(2)式のようなトリガー条件は、例えば、3GPP TS 36.331に規定されている。無線品質の所要値に比べて厳しい値、つまり閾値Q_th1及びQ_TH2にマージン値を加えることで、異常切断の直前に測定報告が行われるように制御できる。また、無線品質としては、例えば3GPP TS 36.214に規定されているRSRP(Reference Signal Received Power)またはRSRQ(Reference Signal Received Quality)を用いることができる。
上述した第1~第5の実施形態は、適宜組み合わせて実施されてもよい。
101 移動端末
111~113 基地局
121 ハンドオーバ(HO)失敗検出部
122、123 ハンドオーバ(HO)失敗情報生成部
131~133 セル
140 ネットワーク
141 ネットワークノード
150 ネットワーク管理システム
151 ハンドオーバ(HO)パラメータ調整部
Claims (46)
- (a)第1の基地局に属する第1のセルから第2の基地局に属する第2のセルへの移動端末の第1のハンドオーバに関するハンドオーバ指示の肯定応答の前記第1の基地局による受信の有無、及び(b)前記第1のハンドオーバの開始後に発生する前記移動端末から前記第1のセルに対する接続再確立の要求の有無を観測することにより、前記第1のセルからの外向きハンドオーバに関する複数のハンドオーバ失敗種別のうち少なくとも一部を検出する検出手段を備える、
ハンドオーバ失敗検出装置。 - 前記検出手段は、前記第1のハンドオーバの開始に依存する第1の所定期間内に前記ハンドオーバ指示の肯定応答が受信されず、かつ前記第1のハンドオーバの開始に依存する第2の所定期間内に前記接続再確立の要求が受信されない場合に、第1のハンドオーバ失敗種別を検出する、請求項1に記載のハンドオーバ失敗検出装置。
- 前記検出手段は、前記第1のハンドオーバの開始に依存する第3の所定期間内に前記接続再確立の要求が受信された場合に、第2のハンドオーバ失敗種別を検出する、請求項1又は2に記載のハンドオーバ失敗検出装置。
- 前記検出手段は、前記第1のハンドオーバに関するハンドオーバ完了通知の受信より前に前記接続再確立の要求が受信された場合に、第2のハンドオーバ失敗種別を検出する、請求項1~3のいずれか1項に記載のハンドオーバ失敗検出装置。
- 前記検出手段は、前記第1のハンドオーバに関するハンドオーバ完了通知の受信に依存する第4の所定期間内に前記接続再確立の要求が受信された場合に、第2のハンドオーバ失敗種別を検出する、請求項1~4のいずれか1項に記載のハンドオーバ失敗検出装置。
- 前記ハンドオーバ完了通知は、前記第1の基地局が接続された上位ネットワークに属するネットワークノードまたは前記第2の基地局から前記第1の基地局に送信される、請求項4又は5に記載のハンドオーバ失敗検出装置。
- 前記ハンドオーバ完了通知は、ハンドオーバ手順において前記第1の基地局が受信するメッセージである、請求項4~6のいずれか1項に記載のハンドオーバ失敗検出装置。
- 前記検出手段は、前記第1のハンドオーバの開始に依存する第4の所定期間内に前記接続再確立の要求が受信されず、かつ前記第1のハンドオーバの開始に依存する第5の所定期間内に前記第2の基地局からハンドオーバ失敗情報が受信された場合に、第3のハンドオーバ失敗種別を検出するよう動作し、
前記第3のハンドオーバ失敗種別は、前記第1のハンドオーバの実行中又は前記第1のハンドオーバの完了後に前記第2のセルでの異常な接続切断を経験した前記移動端末が前記第1及び第2のセルのいずれとも異なる第3のセルに接続再確立を試みる状況に対応する、
請求項1~7のいずれか1項に記載のハンドオーバ失敗検出装置。 - 前記ハンドオーバ失敗情報は、前記第2の基地局が、前記第3のセルを管理する第3の基地局から情報を受信することなく、前記第2のセルに接続しているときの前記移動端末による無線品質の測定情報に基づいて推定した前記第3のセルの識別子を含む、
請求項8に記載のハンドオーバ失敗検出装置。 - 前記ハンドオーバ失敗情報は、前記第1のハンドオーバによる前記移動端末の前記第2のセルへの接続に依存する第6の所定期間内に前記移動端末が前記第2のセルでの異常な接続切断を経験したことに応じて送信される、請求項8又は9に記載のハンドオーバ失敗検出装置。
- 前記検出手段は、前記第1のハンドオーバの開始に依存する第4の所定期間内に前記接続再確立の要求が受信されず、かつ前記第1のハンドオーバの開始に依存する第7の所定期間内に前記第1及び第2のセルのいずれとも異なる第3のセルを管理する第3の基地局からハンドオーバ失敗情報が受信された場合に、第3のハンドオーバ失敗種別を検出するよう動作し、
前記第3のハンドオーバ失敗種別は、前記第1のハンドオーバの実行中又は前記第1のハンドオーバの完了後に前記第2のセルでの接続切断を経験した前記移動端末が前記第1及び第2のセルのいずれとも異なる第3のセルに接続再確立を試みる状況に対応する、
請求項1~7のいずれか1項に記載のハンドオーバ失敗検出装置。 - 前記ハンドオーバ失敗情報は、前記第3の基地局が、前記移動端末の前記第3のセルでの接続再確立の以前の第8の所定期間内に前記移動端末の前記第2のセルへのハンドオーバを要求した基地局が存在することを検出したことに応じて送信される、請求項11に記載のハンドオーバ失敗検出装置。
- 前記検出手段は、前記少なくとも一部のハンドオーバ失敗種別の検出結果に基づいて、前記第1のセルからのハンドオーバに関するフィードバック情報を生成する、請求項1~12のいずれか1項に記載のハンドオーバ失敗検出装置。
- 前記フィードバック情報は、前記少なくとも一部のハンドオーバ失敗種別の発生数又は発生率を示す、請求項13に記載のハンドオーバ失敗検出装置。
- 前記ハンドオーバ指示の肯定応答は、前記移動端末から前記第1の基地局に送信される、請求項1~14のいずれか1項に記載のハンドオーバ失敗検出装置。
- 前記ハンドオーバ指示の肯定応答は、ハンドオーバ手順において前記第1の基地局から前記移動端末に送信したメッセージの再送制御のために、前記移動端末が送信する肯定応答である、請求項1~15のいずれか1項に記載のハンドオーバ失敗検出装置。
- (a)第1の基地局に属する第1のセルから第2の基地局に属する第2のセルへの移動端末の第1のハンドオーバに関するハンドオーバ指示の肯定応答の前記第1の基地局による受信の有無、及び(b)前記第1のハンドオーバの開始後に発生する前記移動端末から前記第1のセルに対する接続再確立の要求の有無に応じて、前記第1のセルからの外向きハンドオーバを制御するためのハンドオーバ・パラメータを調整する調整手段を備える、
ハンドオーバ・パラメータ調整装置。 - 前記調整手段は、前記第1のセルからの外向きハンドオーバに関する複数のハンドオーバ失敗種別のうち少なくとも一部の検出結果に基づくフィードバック情報を受信し、
前記少なくとも一部のハンドオーバ失敗種別の検出結果は、前記ハンドオーバ指示の肯定応答の受信の有無、及び前記接続再確立の要求の有無の観測により得られる、
請求項17に記載のハンドオーバ・パラメータ調整装置。 - 前記調整手段は、前記フィードバック情報を解析することによって前記ハンドオーバ・パラメータを調整する、請求項18に記載のハンドオーバ・パラメータ調整装置。
- 前記調整手段は、
前記少なくとも一部のハンドオーバ失敗種別の各々を前記ハンドオーバ・パラメータの複数の調整方向のいずれかに対応づけ、
前記複数の調整方向の各々について、各調整方向に対応付けられたハンドオーバ失敗種別の発生数又は発生率の総和を求め、
前記発生数又は発生率の総和が最も大きい調整方向に前記ハンドオーバ・パラメータを調整する、
請求項18又は19に記載のハンドオーバ・パラメータ調整装置。 - 前記ハンドオーバ・パラメータは、前記第1のセルの無線品質に作用する第1のオフセット、前記第2のセルの無線品質に作用する第2のオフセット、及び前記第1のセルに接続する移動端末による測定報告の送信を起動するための保護時間のうち少なくとも1つを含む、請求項17~20のいずれか1項に記載のハンドオーバ・パラメータ調整装置。
- 第1の基地局に通知するためのハンドオーバ失敗情報を生成する生成手段を備え、
前記ハンドオーバ失敗情報は、前記第1の基地局に属する第1のセルから第2の基地局に属する第2のセルへの第1のハンドオーバの実行中又は前記第1のハンドオーバの完了後に前記第2のセルでの異常な接続切断を経験した移動端末が前記第1及び第2のセルのいずれとも異なる第3のセルに接続再確立を試みる状況に対応するハンドオーバ失敗種別を検出するために使用される、
ハンドオーバ失敗情報生成装置。 - 前記生成手段は、前記第2の基地局と結合され、
前記ハンドオーバ失敗情報は、前記生成手段が、前記第3のセルを管理する第3の基地局から情報を受信することなく、前記第2のセルに接続しているときの前記移動端末による無線品質の測定報告に基づいて推定した前記第3のセルの識別子を含む、
請求項22に記載のハンドオーバ失敗情報生成装置。 - 前記生成手段は、前記第1のハンドオーバによる前記移動端末の前記第2のセルへの接続に依存する所定期間内に前記移動端末が前記第2のセルでの異常な接続切断を経験したことに応じて、前記ハンドオーバ失敗情報を送信する、請求項23に記載のハンドオーバ失敗情報生成装置。
- 前記生成手段は、前記測定報告において無線品質が最良のセルを前記第3のセルとして推定する、請求項23又は24に記載のハンドオーバ失敗情報生成装置。
- 前記生成手段は、前記第3のセルを管理する第3の基地局と結合され、
前記生成手段は、前記移動端末の前記第3のセルでの接続再確立の以前の所定期間内に前記移動端末の前記第2のセルへのハンドオーバを要求した基地局が存在することを検出したことに応じて、前記ハンドオーバ失敗情報を送信する、請求項22に記載のハンドオーバ失敗情報生成装置。 - 前記生成手段は、前記第3のセルからハンドオーバが可能なセルを管理する基地局を対象に、前記移動端末の前記第2のセルへのハンドオーバを要求した基地局の有無を特定する、請求項26に記載のハンドオーバ失敗情報生成装置。
- (a)第1の基地局に属する第1のセルから第2の基地局に属する第2のセルへの移動端末の第1のハンドオーバに関するハンドオーバ指示の肯定応答の前記第1の基地局による受信の有無、及び(b)前記第1のハンドオーバの開始後に発生する前記移動端末から前記第1のセルに対する接続再確立の要求の有無を観測することにより、前記第1のセルからの外向きハンドオーバに関する複数のハンドオーバ失敗種別のうち少なくとも一部を検出する検出手段と、
前記少なくとも一部のハンドオーバ失敗種別の検出結果に基づいて、前記第1のセルからの外向きハンドオーバを制御するためのハンドオーバ・パラメータを調整する調整手段と、
を備える、ハンドオーバ最適化のためのシステム。 - 前記検出手段は、前記第1のハンドオーバの開始に依存する第1の所定期間内に前記ハンドオーバ指示の肯定応答が受信されず、かつ前記第1のハンドオーバの開始に依存する第2の所定期間内に前記接続再確立の要求が受信されない場合に、第1のハンドオーバ失敗種別を検出する、請求項28に記載のシステム。
- 前記検出手段は、前記第1のハンドオーバの開始に依存する第3の所定期間内に前記接続再確立の要求が受信された場合に、第2のハンドオーバ失敗種別を検出する、請求項28又は29に記載のシステム。
- 前記検出手段は、前記第1のハンドオーバに関するハンドオーバ完了通知の受信より前に前記接続再確立の要求が受信された場合に、第2のハンドオーバ失敗種別を検出する、請求項28~30のいずれか1項に記載のシステム。
- 前記検出手段は、前記第1のハンドオーバに関するハンドオーバ完了通知の受信に依存する第4の所定期間内に前記接続再確立の要求が受信された場合に、第2のハンドオーバ失敗種別を検出する、請求項28~31のいずれか1項に記載のシステム。
- ハンドオーバ失敗情報を生成して前記検出手段に通知する生成手段をさらに備え、
前記検出手段は、前記第1のハンドオーバの開始に依存する第4の所定期間内に前記接続再確立の要求が受信されず、かつ前記第1のハンドオーバの開始に依存する第5の所定期間内にハンドオーバ失敗情報が受信された場合に、第3のハンドオーバ失敗種別を検出するよう動作し、
前記第3のハンドオーバ失敗種別は、前記第1のハンドオーバの実行中又は前記第1のハンドオーバの完了後に前記第2のセルでの異常な接続切断を経験した前記移動端末が前記第1及び第2のセルのいずれとも異なる第3のセルに接続再確立を試みる状況に対応する、
請求項28~32のいずれか1項に記載のシステム。 - 前記生成手段は、前記第2の基地局と結合され、
前記ハンドオーバ失敗情報は、前記生成手段が、前記第3のセルを管理する第3の基地局から情報を受信することなく、前記第2のセルに接続しているときの前記移動端末による無線品質の測定情報に基づいて推定した前記第3のセルの識別子を含む、
請求項33に記載のシステム。 - 前記生成手段は、前記第2の基地局と結合され、
前記生成手段は、前記第1のハンドオーバによる前記移動端末の前記第2のセルへの接続に依存する第6の所定期間内に前記移動端末が前記第2のセルでの異常な接続切断を経験したことに応じて、前記ハンドオーバ失敗情報を送信する、請求項33又は34に記載のシステム。 - 前記生成手段は、前記第3のセルを管理する第3の基地局と結合され、
前記生成手段は、前記移動端末の前記第3のセルでの接続再確立の以前の第8の所定期間内に前記移動端末の前記第2のセルへのハンドオーバを要求した基地局が存在することを検出したことに応じて、前記ハンドオーバ失敗情報を送信する、請求項33に記載のシステム。 - 前記生成手段は、前記第3のセルからハンドオーバが可能なセルを管理する基地局を対象に、前記移動端末の前記第2のセルへのハンドオーバを要求した基地局の有無を特定する、請求項36に記載のシステム。
- 前記ハンドオーバ・パラメータは、前記第1のセルの無線品質に作用する第1のオフセット、前記第2のセルの無線品質に作用する第2のオフセット、及び前記第1のセルに接続する移動端末による測定報告の送信を起動するための保護時間のうち少なくとも1つを含む、請求項28~37のいずれか1項に記載のシステム。
- 前記調整手段は、前記第1のハンドオーバ失敗種別の発生率が所定値を超えるとき、前記第1のオフセットの減少、前記第2のオフセットの増加、及び前記保護時間の減少のうち少なくとも1つを実行する、請求項29を引用する請求項38に記載のシステム。
- 前記調整手段は、前記第2のハンドオーバ失敗種別の発生率が所定値を超えるとき、前記第1のオフセットの増加、前記第2のオフセットの減少、及び前記保護時間の増加のうち少なくとも1つを実行する、請求項30、31、又は32を引用する請求項38に記載のシステム。
- 前記ハンドオーバ・パラメータは、前記第2のオフセット、及び前記第3のセルの無線品質に作用する第3のオフセットを含み、
前記調整手段は、前記第3のハンドオーバ失敗種別の発生率が所定値を超えるとき、前記第2のオフセットの減らすとともに、前記第3のオフセットの増やす、
請求項33~37のいずれか1項を引用する請求項38に記載のシステム。 - 請求項1~16のいずれか1項に記載のハンドオーバ失敗検出装置を備える基地局。
- (a)第1の基地局に属する第1のセルから第2の基地局に属する第2のセルへの移動端末の第1のハンドオーバに関するハンドオーバ指示の肯定応答の前記第1の基地局による受信の有無、及び(b)前記第1のハンドオーバの開始後に発生する前記移動端末から前記第1のセルに対する接続再確立の要求の有無を観測することにより、前記第1のセルからの外向きハンドオーバに関する複数のハンドオーバ失敗種別のうち少なくとも一部を検出することを備える、
ハンドオーバ失敗検出方法。 - (a)第1の基地局に属する第1のセルから第2の基地局に属する第2のセルへの移動端末の第1のハンドオーバに関するハンドオーバ指示の肯定応答の前記第1の基地局による受信の有無、及び(b)前記第1のハンドオーバの開始後に発生する前記移動端末から前記第1のセルに対する接続再確立の要求の有無に応じて、前記第1のセルからの外向きハンドオーバを制御するためのハンドオーバ・パラメータを調整することを備える、
ハンドオーバ・パラメータ調整方法。 - ハンドオーバ失敗検出のための方法をコンピュータに行わせるためのプログラムを格納した非一時的なコンピュータ可読媒体であって、
前記方法は、(a)第1の基地局に属する第1のセルから第2の基地局に属する第2のセルへの移動端末の第1のハンドオーバに関するハンドオーバ指示の肯定応答の前記第1の基地局による受信の有無、及び(b)前記第1のハンドオーバの開始後に発生する前記移動端末から前記第1のセルに対する接続再確立の要求の有無を観測することにより、前記第1のセルからの外向きハンドオーバに関する複数のハンドオーバ失敗種別のうち少なくとも一部を検出することを含む、
コンピュータ可読媒体。 - ハンドオーバ・パラメータ調整のための方法をコンピュータに行わせるためのプログラムを格納した非一時的なコンピュータ可読媒体であって、
前記方法は、(a)第1の基地局に属する第1のセルから第2の基地局に属する第2のセルへの移動端末の第1のハンドオーバに関するハンドオーバ指示の肯定応答の前記第1の基地局による受信の有無、及び(b)前記第1のハンドオーバの開始後に発生する前記移動端末から前記第1のセルに対する接続再確立の要求の有無に応じて、前記第1のセルからの外向きハンドオーバを制御するためのハンドオーバ・パラメータを調整することを含む、
コンピュータ可読媒体。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201380072677.XA CN104982066B (zh) | 2013-02-08 | 2013-11-14 | 移交失败检测设备、移交参数调整设备和移交优化系统 |
| JP2014560538A JPWO2014122706A1 (ja) | 2013-02-08 | 2013-11-14 | ハンドオーバ失敗検出装置、ハンドオーバ・パラメータ調整装置、及びハンドオーバ最適化システム |
| EP13874845.4A EP2955962B1 (en) | 2013-02-08 | 2013-11-14 | Handover failure detection device, handover parameter adjustment device, and handover optimization system |
| US14/762,663 US9992812B2 (en) | 2013-02-08 | 2013-11-14 | Handover failure detection device, handover parameter adjustment device, and handover optimization system |
| KR1020157021351A KR101782391B1 (ko) | 2013-02-08 | 2013-11-14 | 핸드오버 실패 검출 장치, 핸드오버·파라미터 조정 장치, 및 핸드오버 최적화 시스템 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013022846 | 2013-02-08 | ||
| JP2013-022846 | 2013-02-08 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2014122706A1 true WO2014122706A1 (ja) | 2014-08-14 |
Family
ID=51299322
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2013/006692 WO2014122706A1 (ja) | 2013-02-08 | 2013-11-14 | ハンドオーバ失敗検出装置、ハンドオーバ・パラメータ調整装置、及びハンドオーバ最適化システム |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US9992812B2 (ja) |
| EP (1) | EP2955962B1 (ja) |
| JP (1) | JPWO2014122706A1 (ja) |
| KR (1) | KR101782391B1 (ja) |
| CN (1) | CN104982066B (ja) |
| WO (1) | WO2014122706A1 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2016080060A1 (ja) * | 2014-11-19 | 2016-05-26 | ソニー株式会社 | 装置 |
| JP2018133719A (ja) * | 2017-02-16 | 2018-08-23 | パナソニックIpマネジメント株式会社 | 基地局及び通信方法 |
| US10225139B2 (en) | 2016-02-05 | 2019-03-05 | Electronics And Telecommunications Research Institute | Self-organizing network (SON) system and operating method of the same |
| US10827398B2 (en) | 2017-07-24 | 2020-11-03 | Electronics And Telecommunications Research Institute | Communication node for performing handover in wireless communication system and method therefor |
Families Citing this family (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6098712B2 (ja) * | 2013-03-29 | 2017-03-22 | 日本電気株式会社 | 無線通信システムにおける通信装置およびハンドオーバ制御方法 |
| JP2015142363A (ja) * | 2014-01-30 | 2015-08-03 | 株式会社Nttドコモ | 移動局、再接続要求方法、基地局及び再接続要求処理方法 |
| WO2015139850A1 (en) | 2014-03-21 | 2015-09-24 | Telefonaktiebolaget L M Ericsson (Publ) | Mobility robustness optimization in a cellular network |
| KR102157861B1 (ko) * | 2014-04-28 | 2020-09-21 | 삼성전자주식회사 | 무선 통신 시스템에서 접속 관리 방법 및 장치 |
| US20160112924A1 (en) * | 2014-10-15 | 2016-04-21 | Qualcomm Incorporated | Early radio link failure (rlf) declaration |
| EP3248407A1 (en) * | 2015-01-22 | 2017-11-29 | Nokia Solutions and Networks Oy | Improvement of coverage hole analysis |
| JP2017060024A (ja) * | 2015-09-17 | 2017-03-23 | 富士通株式会社 | 基地局装置 |
| KR20170087054A (ko) | 2016-01-19 | 2017-07-27 | 삼성전자주식회사 | 무선 연결 실패 처리 방법과 이를 위한 장치 |
| CN109076417A (zh) | 2016-04-20 | 2018-12-21 | 韩国电子通信研究院 | 切换方法 |
| WO2017183897A1 (ko) * | 2016-04-20 | 2017-10-26 | 한국전자통신연구원 | 핸드오버 방법 |
| KR102447859B1 (ko) * | 2016-04-26 | 2022-09-27 | 삼성전자 주식회사 | 무선 통신 시스템에서 핸드오버를 지원하는 방법 및 장치 |
| CN112887000B (zh) | 2016-05-31 | 2022-07-15 | 中兴通讯股份有限公司 | 信息反馈方法、装置及系统 |
| US11523319B2 (en) | 2017-01-09 | 2022-12-06 | Lg Electronics Inc. | Method for managing PDU session in wireless communication system and device for same |
| ES2925895T3 (es) * | 2017-04-14 | 2022-10-20 | Beijing Xiaomi Mobile Software Co Ltd | Método y dispositivo para conmutar células y equipo de usuario |
| US10085213B1 (en) * | 2017-05-15 | 2018-09-25 | Apple Inc. | Device, system, and method for a high power mode for a cellular connection |
| WO2019136637A1 (en) * | 2018-01-10 | 2019-07-18 | Lenovo (Beijing) Limited | Selecting a base unit in response to a handover condition being triggered |
| WO2020047731A1 (zh) * | 2018-09-04 | 2020-03-12 | Oppo广东移动通信有限公司 | 一种信息传输方法及装置、终端 |
| WO2020061931A1 (zh) | 2018-09-27 | 2020-04-02 | Oppo广东移动通信有限公司 | 一种切换上报的方法、终端设备及网络设备 |
| KR20200048297A (ko) * | 2018-10-29 | 2020-05-08 | 삼성전자주식회사 | 이동통신 시스템에서 핸드오버 성능을 개선하는 방법 및 장치 |
| KR102231597B1 (ko) * | 2018-12-28 | 2021-03-24 | 서강대학교산학협력단 | RAN-Sharing 기술이 적용된 LTE 기반 이종망 공존 환경에서 핸드오버 파라미터를 제어하는 방법 및 장치 |
| CN111836317B (zh) * | 2019-08-14 | 2022-10-18 | 维沃移动通信有限公司 | 状态信息的上报方法、终端及网络设备 |
| US20240073770A1 (en) * | 2021-01-25 | 2024-02-29 | Nokia Technologies Oy | Lmf assisted mro |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011259207A (ja) * | 2010-06-09 | 2011-12-22 | Kyocera Corp | 無線基地局及びその制御方法 |
| JP2012147258A (ja) * | 2011-01-12 | 2012-08-02 | Kddi Corp | ハンドオーバパラメータ調整装置、ハンドオーバパラメータ調整方法およびコンピュータプログラム |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8559298B2 (en) | 2008-06-30 | 2013-10-15 | Qualcomm Incorporated | Method and apparatus for automatic handover optimization |
| US8929894B2 (en) * | 2009-01-06 | 2015-01-06 | Qualcomm Incorporated | Handover failure messaging schemes |
| JP5078954B2 (ja) * | 2009-08-06 | 2012-11-21 | シャープ株式会社 | 移動局装置、基地局装置、無線通信システムおよび無線通信方法 |
| KR20110020398A (ko) * | 2009-08-24 | 2011-03-03 | 삼성전자주식회사 | 광대역 무선통신 시스템에서 핸드오버 최적화를 위한 장치 및 방법 |
| KR20110038571A (ko) | 2009-10-08 | 2011-04-14 | 한국전자통신연구원 | 핸드오버 실패 유형 판단을 위한 서빙 기지국 |
| US9204316B2 (en) * | 2011-09-30 | 2015-12-01 | Blackberry Limited | Enhancement and improvement for hetnet deployments |
| CN103179601B (zh) * | 2011-12-23 | 2019-07-23 | 北京三星通信技术研究有限公司 | 一种检测无线链路失败或切换失败原因的方法 |
| WO2013185354A1 (en) * | 2012-06-15 | 2013-12-19 | Nokia Siemens Networks Oy | Methods, computer program products and apparatuses enabling to improve handovers in mobile communication networks |
| EP3008939B1 (en) * | 2013-06-13 | 2018-08-22 | Telefonaktiebolaget LM Ericsson (publ) | Load sharing in a cellular radio communication system |
-
2013
- 2013-11-14 US US14/762,663 patent/US9992812B2/en active Active
- 2013-11-14 KR KR1020157021351A patent/KR101782391B1/ko active IP Right Grant
- 2013-11-14 CN CN201380072677.XA patent/CN104982066B/zh not_active Expired - Fee Related
- 2013-11-14 JP JP2014560538A patent/JPWO2014122706A1/ja active Pending
- 2013-11-14 EP EP13874845.4A patent/EP2955962B1/en active Active
- 2013-11-14 WO PCT/JP2013/006692 patent/WO2014122706A1/ja active Application Filing
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011259207A (ja) * | 2010-06-09 | 2011-12-22 | Kyocera Corp | 無線基地局及びその制御方法 |
| JP2012147258A (ja) * | 2011-01-12 | 2012-08-02 | Kddi Corp | ハンドオーバパラメータ調整装置、ハンドオーバパラメータ調整方法およびコンピュータプログラム |
Non-Patent Citations (3)
| Title |
|---|
| FUJITSU: "Timers in MRO failure detection", 3GPP TSG-RAN WG3#75BIS R3-120641, 30 March 2012 (2012-03-30), XP050668998 * |
| SAMSUNG: "Failure Detection without the RRC Re-establishment Attempt", 3GPP TSG-RAN WG3#77 R3-121761, 17 August 2012 (2012-08-17), XP055269830 * |
| See also references of EP2955962A4 * |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2016080060A1 (ja) * | 2014-11-19 | 2016-05-26 | ソニー株式会社 | 装置 |
| US10764773B2 (en) | 2014-11-19 | 2020-09-01 | Sony Corporation | Apparatus including an acquirer to acquire a parameter for a user relating to interference cancellation and a controller to perform measurement reporting of a cell in accordance with the parameter |
| US10225139B2 (en) | 2016-02-05 | 2019-03-05 | Electronics And Telecommunications Research Institute | Self-organizing network (SON) system and operating method of the same |
| JP2018133719A (ja) * | 2017-02-16 | 2018-08-23 | パナソニックIpマネジメント株式会社 | 基地局及び通信方法 |
| US11259221B2 (en) | 2017-02-16 | 2022-02-22 | Panasonic Intellectual Property Management Co., Ltd. | Base station and communication method |
| US10827398B2 (en) | 2017-07-24 | 2020-11-03 | Electronics And Telecommunications Research Institute | Communication node for performing handover in wireless communication system and method therefor |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2955962A4 (en) | 2016-12-21 |
| CN104982066B (zh) | 2019-03-15 |
| US9992812B2 (en) | 2018-06-05 |
| KR20150106422A (ko) | 2015-09-21 |
| EP2955962B1 (en) | 2020-12-30 |
| CN104982066A (zh) | 2015-10-14 |
| KR101782391B1 (ko) | 2017-09-27 |
| US20150373772A1 (en) | 2015-12-24 |
| JPWO2014122706A1 (ja) | 2017-01-26 |
| EP2955962A1 (en) | 2015-12-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2014122706A1 (ja) | ハンドオーバ失敗検出装置、ハンドオーバ・パラメータ調整装置、及びハンドオーバ最適化システム | |
| WO2014002320A1 (ja) | ハンドオーバ失敗検出装置、ハンドオーバ・パラメータ調整装置、及びハンドオーバ最適化システム | |
| US11671310B2 (en) | Mobility robustness in a cellular network | |
| KR102115896B1 (ko) | 무선 링크 실패 또는 핸드오버 실패의 원인을 검출하기 위한 방법 | |
| US8208924B2 (en) | Method and system for improving call drop caused by radio link failure in mobile communication system | |
| JP5698843B2 (ja) | 情報を提供するための方法、移動局装置、基地局装置及び通信装置 | |
| JP5978515B2 (ja) | 無線リンク障害統計方法、関連する装置、および通信システム | |
| KR102044019B1 (ko) | 이동성 매개변수 조정 방법 및 장치 | |
| JP2016527839A (ja) | 無線リソース制御接続の方法および装置 | |
| EP3051877A1 (en) | Cell handover method and apparatus | |
| WO2013152708A1 (zh) | 无线链路失败报告处理方法、异常事件统计处理方法及设备和系统 | |
| JP6899550B2 (ja) | 基地局及び通信方法 | |
| WO2014154132A1 (zh) | 一种针对无线链路失败的网络优化方法、装置及系统 | |
| WO2015081510A1 (zh) | 一种进行无线资源控制连接重建的方法和基站 | |
| WO2012100669A1 (zh) | 一种参数处理方法及基站 | |
| WO2014002321A1 (ja) | ハンドオーバ最適化システム、ハンドオーバ最適化制御装置、及びハンドオーバ・パラメータ調整装置 | |
| US9894540B2 (en) | Optimisation of a cellular radio network | |
| JP2021520718A (ja) | 無線通信ネットワークにおける無線リンク障害管理 | |
| WO2023134763A1 (zh) | 信息报告方法以及用户设备 | |
| JP2015177400A (ja) | 通信装置、通信方法、および、プログラム | |
| WO2023241622A1 (zh) | 由用户设备执行的方法、用户设备以及信息报告方法 | |
| Watanabe et al. | Inter-eNB coordination-free algorithm for mobility robustness optimization in LTE HetNet | |
| WO2024067624A1 (zh) | 信息报告方法以及用户设备 | |
| WO2024008076A1 (zh) | 切换信息报告方法以及用户设备 | |
| WO2023246770A1 (zh) | 由用户设备执行的方法以及用户设备 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 13874845 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2014560538 Country of ref document: JP Kind code of ref document: A |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 14762663 Country of ref document: US |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2013874845 Country of ref document: EP |
|
| ENP | Entry into the national phase |
Ref document number: 20157021351 Country of ref document: KR Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |