WO2013046314A1 - Système d'alimentation électrique et procédé de commande de celui-ci - Google Patents
Système d'alimentation électrique et procédé de commande de celui-ci Download PDFInfo
- Publication number
- WO2013046314A1 WO2013046314A1 PCT/JP2011/071987 JP2011071987W WO2013046314A1 WO 2013046314 A1 WO2013046314 A1 WO 2013046314A1 JP 2011071987 W JP2011071987 W JP 2011071987W WO 2013046314 A1 WO2013046314 A1 WO 2013046314A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- voltage
- power
- current
- control
- storage device
- Prior art date
Links
Images





Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L58/00—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles
- B60L58/10—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries
- B60L58/12—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries responding to state of charge [SoC]
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L15/00—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles
- B60L15/20—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles for control of the vehicle or its driving motor to achieve a desired performance, e.g. speed, torque, programmed variation of speed
- B60L15/2009—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles for control of the vehicle or its driving motor to achieve a desired performance, e.g. speed, torque, programmed variation of speed for braking
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L50/00—Electric propulsion with power supplied within the vehicle
- B60L50/10—Electric propulsion with power supplied within the vehicle using propulsion power supplied by engine-driven generators, e.g. generators driven by combustion engines
- B60L50/16—Electric propulsion with power supplied within the vehicle using propulsion power supplied by engine-driven generators, e.g. generators driven by combustion engines with provision for separate direct mechanical propulsion
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L50/00—Electric propulsion with power supplied within the vehicle
- B60L50/50—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells
- B60L50/60—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells using power supplied by batteries
- B60L50/61—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells using power supplied by batteries by batteries charged by engine-driven generators, e.g. series hybrid electric vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L7/00—Electrodynamic brake systems for vehicles in general
- B60L7/10—Dynamic electric regenerative braking
- B60L7/14—Dynamic electric regenerative braking for vehicles propelled by ac motors
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J1/00—Circuit arrangements for dc mains or dc distribution networks
- H02J1/08—Three-wire systems; Systems having more than three wires
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J1/00—Circuit arrangements for dc mains or dc distribution networks
- H02J1/08—Three-wire systems; Systems having more than three wires
- H02J1/082—Plural DC voltage, e.g. DC supply voltage with at least two different DC voltage levels
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J1/00—Circuit arrangements for dc mains or dc distribution networks
- H02J1/10—Parallel operation of dc sources
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02M—APPARATUS FOR CONVERSION BETWEEN AC AND AC, BETWEEN AC AND DC, OR BETWEEN DC AND DC, AND FOR USE WITH MAINS OR SIMILAR POWER SUPPLY SYSTEMS; CONVERSION OF DC OR AC INPUT POWER INTO SURGE OUTPUT POWER; CONTROL OR REGULATION THEREOF
- H02M3/00—Conversion of dc power input into dc power output
- H02M3/02—Conversion of dc power input into dc power output without intermediate conversion into ac
- H02M3/04—Conversion of dc power input into dc power output without intermediate conversion into ac by static converters
- H02M3/10—Conversion of dc power input into dc power output without intermediate conversion into ac by static converters using discharge tubes with control electrode or semiconductor devices with control electrode
- H02M3/145—Conversion of dc power input into dc power output without intermediate conversion into ac by static converters using discharge tubes with control electrode or semiconductor devices with control electrode using devices of a triode or transistor type requiring continuous application of a control signal
- H02M3/155—Conversion of dc power input into dc power output without intermediate conversion into ac by static converters using discharge tubes with control electrode or semiconductor devices with control electrode using devices of a triode or transistor type requiring continuous application of a control signal using semiconductor devices only
- H02M3/156—Conversion of dc power input into dc power output without intermediate conversion into ac by static converters using discharge tubes with control electrode or semiconductor devices with control electrode using devices of a triode or transistor type requiring continuous application of a control signal using semiconductor devices only with automatic control of output voltage or current, e.g. switching regulators
- H02M3/158—Conversion of dc power input into dc power output without intermediate conversion into ac by static converters using discharge tubes with control electrode or semiconductor devices with control electrode using devices of a triode or transistor type requiring continuous application of a control signal using semiconductor devices only with automatic control of output voltage or current, e.g. switching regulators including plural semiconductor devices as final control devices for a single load
- H02M3/1582—Buck-boost converters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2210/00—Converter types
- B60L2210/10—DC to DC converters
- B60L2210/12—Buck converters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2210/00—Converter types
- B60L2210/10—DC to DC converters
- B60L2210/14—Boost converters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2210/00—Converter types
- B60L2210/30—AC to DC converters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2210/00—Converter types
- B60L2210/40—DC to AC converters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2220/00—Electrical machine types; Structures or applications thereof
- B60L2220/10—Electrical machine types
- B60L2220/14—Synchronous machines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/42—Drive Train control parameters related to electric machines
- B60L2240/421—Speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/42—Drive Train control parameters related to electric machines
- B60L2240/423—Torque
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/42—Drive Train control parameters related to electric machines
- B60L2240/429—Current
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/54—Drive Train control parameters related to batteries
- B60L2240/547—Voltage
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/54—Drive Train control parameters related to batteries
- B60L2240/549—Current
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2270/00—Problem solutions or means not otherwise provided for
- B60L2270/20—Inrush current reduction, i.e. avoiding high currents when connecting the battery
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J2310/00—The network for supplying or distributing electric power characterised by its spatial reach or by the load
- H02J2310/40—The network being an on-board power network, i.e. within a vehicle
- H02J2310/48—The network being an on-board power network, i.e. within a vehicle for electric vehicles [EV] or hybrid vehicles [HEV]
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/64—Electric machine technologies in electromobility
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/70—Energy storage systems for electromobility, e.g. batteries
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/7072—Electromobility specific charging systems or methods for batteries, ultracapacitors, supercapacitors or double-layer capacitors
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
Definitions
- the present invention relates to a power supply system and a control method thereof, and more specifically to control of a power supply system equipped with a plurality of power storage devices.
- a power conversion device that converts output power of a power storage device mounted on a vehicle into drive power of a traveling motor, a converter capable of boosting the output voltage of the power storage device, and an output direct current of the converter It has been adopted that it is constituted by a combination with an inverter that converts a voltage into an AC voltage and applies it to a motor.
- Patent Document 1 discloses a power supply system including a plurality of power storage devices and a plurality of converters provided between the DC power lines connected to the inverter and the plurality of power storage devices. Is disclosed. In the power supply system described in Patent Document 1, one of the two converters is controlled according to voltage control for setting the voltage value of the DC power line to a predetermined voltage target value, while the other is controlled by a corresponding power storage device. The charging / discharging current is controlled according to current control for setting a predetermined current target value.
- the present invention has been made to solve such a problem, and an object of the present invention is to simplify and improve the efficiency of a power supply system equipped with a plurality of power storage devices while ensuring a variable control function of DC voltage. It is to make up.
- a power supply system that supplies power to a load, the first power storage device, the second power storage device, and a power line for transmitting power input / output to / from the load
- a converter for performing bidirectional DC voltage conversion between the first power storage device and the power line; a switch connected between the second power storage device and the power line; And a control device for controlling the converter.
- the control device controls the voltage of the converter so that the voltage value of the power line becomes the voltage command value when the switch is off, while the current value of the first power storage device becomes the current command value when the switch is on. So as to control the current of the converter.
- the control device outputs a voltage feedback control element including at least a switching unit that switches on / off of the switch according to an operation state of the load and an integration element that integrates a deviation of the voltage value of the power line with respect to the voltage command value.
- the converter is current-controlled according to the output of a voltage control unit that controls the voltage of the converter and an output of a current feedback control element that includes at least an integration element that integrates the deviation of the current value of the first power storage device from the current command value.
- Current control unit When switching the switch from on to off, the voltage control unit takes over the output of the integration element in the current feedback control element from the current control unit as the initial value of the integration element in the voltage feedback control element.
- the current control unit takes over the output of the integration element in the voltage feedback control element from the voltage control unit as the initial value of the integration element in the current feedback control element.
- the voltage control unit performs a proportional-integral calculation on a deviation of the voltage value of the power line with respect to the voltage command value, and outputs the calculated control amount as a current command value, and a current output from the voltage control calculation unit
- a current control calculation unit that performs a proportional integral calculation on a deviation of the current value of the first power storage device with respect to the command value and outputs the calculated control amount as a duty ratio command value to the converter.
- the current control calculation unit receives a current command value set according to the power target value to be shared by the first power storage device, instead of the current command value output from the voltage control calculation unit By being configured in this manner, it functions as a current control unit.
- the load includes an electric motor that receives electric power supplied from a power supply system and generates vehicle driving force.
- the voltage control unit calculates the necessary minimum voltage of the power line according to the torque and rotation speed of the electric motor, and sets the voltage command value in a range equal to or greater than the necessary minimum voltage.
- the current control unit calculates the required power of the motor according to the torque and the rotational speed of the motor, determines a power target value to be shared by the first power storage device according to the required power of the motor, A current target value is set by dividing the value by the voltage of the first power storage device.
- a control method for a power supply system that supplies power to a load, the power supply system being input / output with respect to a first power storage device, a second power storage device, and a load.
- a power line for transmitting electric power a converter for performing bidirectional DC voltage conversion between the first power storage device and the power line, and an open / close connected between the second power storage device and the power line Including
- the control method includes a step of controlling the voltage of the converter so that the voltage value of the power line becomes the voltage command value when the switch is off, and the current value of the first power storage device becomes the current command value when the switch is on. And a step of current-controlling the converter.
- the present invention in a power supply system in which a plurality of power storage devices are mounted, even if a configuration is provided in which only some of the power storage devices have a converter, power is supplied to the load by using the plurality of power storage devices in a coordinated manner. Can do. As a result, since a plurality of power storage devices can be effectively used to supply power to the load, the power supply system can be reduced in size and efficiently configured at low cost.
- FIG. 1 is a schematic configuration diagram of an electric vehicle to which a power supply system according to an embodiment of the present invention is applied. It is a conceptual diagram which shows the relationship between a system voltage and the operation possible area
- FIG. 1 is a schematic configuration diagram of an electric vehicle to which a power supply system according to an embodiment of the present invention is applied.
- a load 10 is a drive system that generates a drive force of an electric vehicle 5 is illustrated.
- the electric vehicle 5 travels by transmitting the driving force generated by the electric power supplied from the power supply system 20 to the load 10 to the driving wheels 260.
- the electric vehicle 5 produces
- the electric vehicle 5 is typically a hybrid vehicle, and is equipped with an internal combustion engine (engine) 220 and an electric motor (MG: Motor Generator), and travels while controlling the driving force from each of them to an optimal ratio.
- Electric vehicle 5 is equipped with a plurality of (for example, two) power storage devices for supplying electric power to the motor generator. These power storage devices can be charged by receiving the power generated by the operation of the engine 220 when the system of the electric vehicle 5 is activated, and are connected to the outside of the vehicle via a connection portion (not shown) while the system of the electric vehicle 5 is stopped. It is electrically connected to a power source and can be charged.
- electric vehicle 5 includes two motor generators and corresponding inverters.
- three or more motor generators and inverters are included. The present invention can be applied even when provided.
- the electric vehicle 5 includes a load 10, a power supply system 20, and a control device 300.
- Load 10 includes an inverter 120, motor generators MG1 and MG2, a power split mechanism 250, an engine 220, and drive wheels 260.
- Motor generators MG1 and MG2 are AC rotating electric machines, for example, permanent magnet type synchronous motors including a rotor having a permanent magnet embedded therein and a stator having a three-phase coil Y-connected at a neutral point.
- Motor generators MG1 and MG2 are transmitted to drive wheels 260 via power split mechanism 250 to cause electric vehicle 5 to travel.
- Motor generators MG ⁇ b> 1 and MG ⁇ b> 2 can generate electric power using the rotational force of drive wheels 260 during regenerative braking of electric vehicle 5. Then, the generated power is converted into charging power for power storage device 100 and / or 150 by converter 110 and inverter 120.
- Motor generators MG1 and MG2 are also coupled to engine 220 via power split mechanism 250.
- Control device 300 operates motor generators MG1 and MG2 and engine 220 in cooperation to generate a necessary vehicle driving force. Further, motor generators MG1 and MG2 can generate electric power by rotating engine 220, and can use this generated electric power to charge power storage devices 100 and / or 150.
- motor generator MG2 is mainly used as an electric motor for driving drive wheels 260, and motor generator MG1 is mainly used as a generator driven by engine 220. That is, motor generator MG2 corresponds to an “electric motor” for generating vehicle driving force.
- the power split mechanism 250 is configured to include a planetary gear mechanism (planetary gear) in order to distribute the power of the engine 220 to the drive wheels 260 and the motor generator MG1.
- a planetary gear mechanism planetary gear
- Current sensors 230 and 240 detect motor currents (that is, inverter output currents) MCRT1 and MCRT2 respectively flowing in motor generators MG1 and MG2, and output the detected motor currents to control device 300. Since the sum of the instantaneous values of the currents iu, iv, and iw in the U, V, and W phases is zero, the current sensors 230 and 240 are motor currents for two phases of the U, V, and W phases ( For example, it is sufficient to arrange to detect the V-phase current iv and the W-phase current iw).
- Rotation angle sensors (for example, resolvers) 270 and 280 detect rotation angles ⁇ 1 and ⁇ 2 of motor generators MG1 and MG2, respectively, and send the detected rotation angles ⁇ 1 and ⁇ 2 to control device 300.
- Control device 300 can calculate the rotational speed and angular speed of motor generators MG1, MG2 based on rotational angles ⁇ 1, ⁇ 2.
- the rotation angle sensors 270 and 280 may be omitted by directly calculating the rotation angles ⁇ 1 and ⁇ 2 from the motor voltage and current in the control device 300.
- Inverter 120 performs bidirectional power conversion between DC power between power supply line HPL and ground line NL1 and AC power input / output to / from motor generators MG1 and MG2.
- power supply line HPL corresponds to a “power line” for transmitting power input / output to / from motor generators MG1 and MG2.
- inverter 120 includes a first inverter for driving motor generator MG1 and a second inverter for driving motor generator MG2.
- the first inverter converts AC power generated by motor generator MG1 by the output of engine 220 into DC power in accordance with control signal PWI from control device 300, and supplies the DC power to power supply line HPL and ground line NL1.
- converter 110 is controlled by control device 300 so as to operate as a step-down circuit.
- power storage device 100 and / or power storage device 150 can be actively charged by the output of engine 220 even while the vehicle is traveling.
- first inverter converts DC power from power storage device 100 and power storage device 150 into AC power in accordance with control signal PWI from control device 300, and supplies the AC power to motor generator MG1. .
- engine 220 can be started using motor generator MG1 as a starter.
- the second inverter converts DC power supplied via the power supply line HPL and the ground line NL1 into AC power according to the control signal PWI from the control device 300, and supplies the AC power to the motor generator MG2. Thereby, motor generator MG2 generates the driving force of electric vehicle 5.
- motor generator MG2 generates AC power as drive wheel 260 is decelerated.
- the second inverter converts AC power generated by motor generator MG2 into DC power according to control signal PWI from control device 300, and supplies the DC power to power supply line HPL and ground line NL1.
- power storage device 100 and / or power storage device 150 are charged during deceleration or downhill travel.
- the power supply system 20 includes a power storage device 100 corresponding to a “first power storage device”, a power storage device 150 corresponding to a “second power storage device”, a system main relay 190, relays RL1 to RL3, and a resistor R2, Converter 110 and smoothing capacitors C1 and C2 are included.
- the power storage devices 100 and 150 are rechargeable power storage elements, and typically, secondary batteries such as lithium ion batteries and nickel metal hydride batteries are applied. Therefore, hereinafter, power storage device 100 and power storage device 150 are also referred to as battery 100 and battery 150, respectively. However, power storage devices 100 and 150 may be configured by a power storage element other than a battery, such as an electric double layer capacitor, or a combination of a power storage element other than a battery and a battery.
- power storage devices 100 and 150 may be configured by the same type of power storage device or may be configured by different types of power storage devices.
- Each of the batteries 100 and 150 includes a plurality of battery cells connected in series. That is, the rated value of the output voltage of each of batteries 100 and 150 depends on the number of battery cells connected in series.
- the battery 100 is provided with a battery sensor 105 for detecting the battery voltage Vb1 and the battery current Ib1.
- battery 150 is provided with a battery sensor 155 for detecting battery voltage Vb2 and battery current Ib2. Detection values from the battery sensors 105 and 155 are transmitted to the control device 300.
- System main relay 190 includes relays SMR1 to SMR3 and resistor R1. Relays SMR1 and SMR2 are inserted in power supply line PL1 and ground line NL1, respectively. Relay SMR3 is connected in parallel with relay SMR2 and in series with resistor R1. That is, a circuit in which the relay SMR3 and the resistor R1 are connected in series is connected in parallel to the relay SMR2. Relays SMR1 to SMR3 are controlled to be turned on (closed) / off (opened) in accordance with relay control signals SE1 to SE3 given from control device 300.
- Relay RL1 is connected between power supply line HPL and the positive terminal of power storage device 150.
- Relay RL2 is connected between the negative terminal of power storage device 150 and ground line NL1.
- Relay RL3 is connected in parallel with relay RL2 and in series with resistor R2. That is, a circuit in which the relay RL3 and the resistor R2 are connected in series is connected in parallel to the relay RL2.
- Relays RL1 to RL3 are controlled to be turned on (closed) / off (opened) in accordance with relay control signals SR1 to SR3 given from control device 300.
- Relay RL1 is used as a representative example of a “switch” that can cut off electrical connection between power storage device 150 and power supply line HPL. That is, any type of switch can be applied in place of the relay RL1.
- Converter 110 is configured to perform bidirectional DC voltage conversion between power storage device 100 and power supply line HPL that transmits the DC link voltage of inverter 120. That is, the input / output voltage of power storage device 100 and the DC voltage between power supply line HPL and ground line NL1 are boosted or lowered in both directions.
- converter 110 includes a reactor L1 having one end connected to power supply line PL1, switching elements Q1, Q2 connected in series between power supply line HPL and ground line NL1, and switching elements Q1, Q2. Includes diodes D1 and D2 connected in parallel.
- an IGBT Insulated Gate Bipolar Transistor
- bipolar transistor a bipolar transistor
- MOSFET Metal Oxide Semiconductor Field Effect Transistor
- GTO Gate Turn Off Thyristor
- the other end of the reactor L1 is connected to the emitter of the switching element Q1 and the collector of the switching element Q2.
- the cathode of diode D1 is connected to the collector of switching element Q1, and the anode of diode D1 is connected to the emitter of switching element Q1.
- the cathode of diode D2 is connected to the collector of switching element Q2, and the anode of diode D2 is connected to the emitter of switching element Q2.
- the switching elements Q1, Q2 are controlled to be turned on or off by a control signal PWC from the control device 300.
- Smoothing capacitor C1 is connected between power supply line PL1 and ground line NL1, and reduces voltage fluctuation between power supply line PL1 and ground line NL1.
- the voltage sensor 170 detects the voltage VL between the terminals of the smoothing capacitor C1 and outputs it to the control device 300.
- Converter 110 boosts the voltage across terminals of smoothing capacitor C1.
- Current sensor 160 is inserted in power supply line PL ⁇ b> 1, detects a current flowing through reactor L ⁇ b> 1 (corresponding to a current related to charging / discharging of power storage device 100) IL, and outputs it to control device 300. Note that the current sensor 160 is not essential, and the current IL may be substituted by the battery current Ib1 detected by the battery sensor 105 provided in the power storage device 100.
- the smoothing capacitor C2 is connected between the power supply line HPL and the ground line NL1, and reduces voltage fluctuation between the power supply line HPL and the ground line NL1. That is, the smoothing capacitor C2 smoothes the voltage boosted by the converter 110.
- the voltage sensor 180 detects the terminal voltage VH of the smoothing capacitor C2 and outputs it to the control device 300.
- the voltage VH between the terminals of the smoothing capacitor C2 (that is, the DC side voltage of the inverter 120) is also referred to as “system voltage VH”.
- the control device 300 includes a CPU (Central Processing Unit), a storage device, and an input / output buffer (not shown), and controls the converter 110 and the inverter 120. Note that these controls are not limited to software processing, and can be constructed and processed by dedicated hardware (electronic circuit).
- Control device 300 receives detected values of motor currents MCRT1 and MCRT2 flowing in motor generators MG1 and MG2 detected by current sensors 230 and 240, respectively. Control device 300 receives detection values of rotation angles ⁇ 1 and ⁇ 2 of motor generators MG1 and MG2 detected by rotation angle sensors 270 and 280. Control device 300 also detects detected values of voltages VL and VH across smoothing capacitors C1 and C2 detected by voltage sensors 170 and 180, and current IL related to charging and discharging of power storage device 100 detected by current sensor 160. Receive the detected value. Furthermore, control device 300 receives an ignition signal IG indicating an on / off state of an ignition switch (not shown).
- Control device 300 generates control signal PWC of converter 110 based on voltages VL and VH across smoothing capacitors C1 and C2. Controller 300 causes converter 110 to perform a step-up operation or a step-down operation by driving switching elements Q1 and Q2 of converter 110 by control signal PWC.
- Control device 300 also includes motor currents MCRT1 and MCRT2 flowing in motor generators MG1 and MG2 detected by current sensors 230 and 240, and rotation angles of motor generators MG1 and MG2 detected by rotation angle sensors 270 and 280, respectively.
- a control signal PWI for driving the inverter 120 is generated based on ⁇ 1 and ⁇ 2.
- Control device 300 converts the DC power supplied from converter 110 into AC power for driving motor generators MG1 and MG2 by driving the switching element of inverter 120 by control signal PWI.
- the control device 300 generates relay control signals SE1 to SE3 based on the ignition signal IG. Then, control device 300 controls ON / OFF of relays SMR1 to SMR3 of system main relay 190 by relay control signals SE1 to SE3. Specifically, when the ignition signal IG is switched from the off state to the on state by the driver turning on the ignition switch, control device 300 first turns on relays SMR1 and SMR3 while relay SMR2 is off. To do. At this time, a part of the current is consumed by the resistor R1, and the current flowing into the smoothing capacitor C1 can be reduced, so that an inrush current to the smoothing capacitor C1 can be prevented. Thereafter, when the precharge of the smoothing capacitor C1 is completed, the relay SMR2 is turned on, and subsequently, the relay SMR3 is turned off.
- Control device 300 generates relay control signals SR1 to SR3 based on the operating states of motor generators MG1 and MG2 and the detection values of the sensors. Then, control device 300 controls ON / OFF of relays RL1 to RL3 by relay control signals SR1 to SR3. Specifically, when electrically connecting power storage device 150 to power supply line HPL, control device 300 first turns on relays RL1 and RL3 while relay RL2 is off. At this time, a part of the current is consumed by the resistor R2, and the current flowing into the smoothing capacitor C2 can be reduced, so that an inrush current to the smoothing capacitor C2 can be prevented. Thereafter, when the precharge of the smoothing capacitor C2 is completed, the relay RL2 is turned on, and subsequently, the relay RL3 is turned off.
- the power supply system 20 includes the plurality of power storage devices 100 and 150.
- Power storage device 150 is directly electrically connected to power supply line HPL without going through converter 110. Therefore, when relays RL1 and RL2 are on, system voltage VH cannot be made higher than battery voltage Vb2.
- power storage device 100 is connected to power supply line HPL via converter 110. Therefore, even when battery voltage Vb1 is lower than system voltage VH, power can be supplied from power storage device 100 to power supply line HPL, and power storage device 100 can be charged by the power of power supply line HPL.
- the rated value of the output voltage of power storage device 100 be lower than the rated value of the output voltage of power storage device 150.
- the power storage devices 100 and 150 can be used in parallel even if the number of battery cells connected in series in the power storage device 100 is reduced.
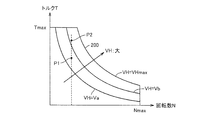
- FIG. 2 is a conceptual diagram showing the relationship between the system voltage and the operable region of the motor generator.
- the maximum output line 200 has a portion limited by T ⁇ N corresponding to the output power even if the torque T ⁇ Tmax (maximum torque) and the rotational speed N ⁇ Nmax (maximum rotational speed). As the system voltage VH decreases, the operable area becomes narrower.
- the minimum voltage VHmin required to ensure the output according to the operating point can be calculated in advance in correspondence with the operating point of the motor generators MG1, MG2.
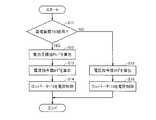
- FIG. 3 is a flowchart for explaining an example of control processing of the power supply system according to the embodiment of the present invention.
- the processing of each step in the flowchart shown below is executed by software processing or hardware processing by the control device 300.
- a series of control processing according to each of the flowcharts shown below is executed by the control device 300 every predetermined control cycle.
- the voltage command value VH * can be calculated corresponding to the operating points of the motor generators MG1 and MG2 in consideration of the necessary minimum voltage VHmin. Therefore, a map (voltage command value map) for calculating voltage command value VH * in accordance with the operating points of motor generators MG1 and MG2 can be created in advance.
- the voltage command value map is stored in a memory (not shown) of the control device 300.
- system voltage VH is variably controlled in order to drive motor generators MG1 and MG2 smoothly and efficiently. That is, the voltage amplitude (pulse voltage amplitude) applied to motor generators MG1 and MG2 is variably controlled in accordance with the operating states (rotation speed and torque) of motor generators MG1 and MG2.
- step S02 the control device 300 reads battery information based on the detection values of the battery sensors 105 and 155 shown in FIG.
- the battery information includes at least the battery voltage Vb2.
- Control device 300 compares battery voltage Vb2 with voltage command value VH * set in step S01 in step S03. When battery voltage Vb2 is equal to or higher than voltage command value VH * (when YES is determined in step S03), control device 300 proceeds to step S04 and turns on relays RL1 and RL2. Thereby, power storage device 150 is connected to power supply line HPL.
- Converter 110 controls charging / discharging of power storage device 100 so that current IL from power storage device 100 (corresponding to battery current Ib1) matches predetermined current target value Ib1 * by a method described later.
- charging / discharging electric power Pb1 of the electrical storage apparatus 100 can be adjusted arbitrarily, the charging / discharging electric power Pb2 of the electrical storage apparatus 150 can also be controlled indirectly.
- power storage devices 100 and 150 can be charged in parallel.
- control device 300 proceeds to step S05 and turns off relays RL1 and RL2. Thereby, power storage device 150 is disconnected from power supply line HPL. Since voltage command value VH * ⁇ VHmin as described above, relays RL1 and RL2 are reliably turned off at least when Vb2 ⁇ VHmin.
- Converter 110 controls charging / discharging of power storage device 100 such that system voltage VH matches predetermined voltage command value VH * by a method described later. In this state, when electric vehicle 5 performs regenerative braking, only power storage device 100 is charged.
- the converter is provided only for power storage device 100, depending on the operation state of motor generators MG1 and MG2.
- VH Variable control of the system voltage VH can be realized.
- power storage device 150 having an output voltage lower than the voltage command value (required minimum voltage) is disconnected from power supply line HPL, and power storage device 100
- the power storage devices 100 and 150 can be connected. Can be used in parallel.
- the power supply system can be efficiently reduced in size and at low cost. It becomes.
- control device 300 controls the voltage conversion operation in converter 110 as follows.
- FIG. 4 is a flowchart illustrating converter control processing in the power supply system according to the embodiment of the present invention.
- control device 300 determines in step S11 whether or not the first mode in which power storage device 150 is used is selected.
- control device 300 includes power out of power supplied from power supply system 20 to load 10 in step S12. Then, a power target value to be shared by power storage device 100 (that is, a target value of charge / discharge power Pb1 of power storage device 100) Pb1 * is calculated.
- the sum of charge / discharge power Pb1 of power storage device 100 and charge / discharge power Pb2 of power storage device 150 is the power charged / discharged from power supply system 20 to load 10.
- the charge / discharge power of load 10 includes electric power Pg generated / consumed by motor generator MG1 and electric power Pm generated / consumed by motor generator MG2, so that charge / discharge power Pb1 of electric storage device 100 and the electric storage device
- the relationship between the 150 charge / discharge power Pb2 and the charge / discharge power of the load 10 is expressed by the following equation (1).
- Pb1 + Pb2 Pg + Pm (1)
- charging / discharging power Pb2 of power storage device 150 is determined in association with charge / discharge control of power storage device 100 by converter 110. That is, the charge / discharge power Pb2 of the power storage device 150 is determined by the course. Therefore, in the first mode, control device 300 uses the power (charge / discharge power Pb1) shared by power storage device 100 among the power supplied from power supply system 20 to load 10 as a predetermined power target value Pb1 *. Thus, the converter 110 is controlled.
- charging / discharging electric power Pb1 of the electrical storage apparatus 100 can be adjusted arbitrarily, the charging / discharging electric power Pb2 of the electrical storage apparatus 150 can also be controlled indirectly. As a result, it becomes possible to supply electric power to motor generators MG1 and MG2 using power storage devices 100 and 150 in a cooperative manner.
- control device 300 calculates power target value Pb1 * in step S12
- control device 300 divides power target value Pb1 * by battery voltage Vb1 of power storage device 100 in step S13, and current command value of power storage device 100 is calculated. Ib1 * is calculated.
- control device 300 controls converter 110 so that current IL from power storage device 100 becomes current command value Ib1 * in step S14. Thereby, converter 110 performs voltage conversion operation according to current control so as to realize power distribution in power storage device 100.
- control device 300 calculates voltage command value VH * in step S15. To do. For the calculation of the voltage command value VH *, the process shown in step S01 of FIG. 3 is executed.
- control device 300 controls converter 110 such that system voltage VH becomes voltage command value VH *. Therefore, converter 110 performs a voltage conversion operation according to voltage control so as to stabilize system voltage VH.
- FIG. 5 is a diagram illustrating a configuration example of a control block for realizing current control of the converter 110 in the control device 300.
- control device 300 has a power target value generation unit 30, a division unit 32, a subtraction unit 34, a PI control unit 36, a transfer function ( Gi) 38.
- the power target value generation unit 30 calculates the power target value Pb1 * of the power storage device 100 within the power range in which the power storage device 100 can be charged and discharged.
- the power range in which power storage device 100 can be charged and discharged is defined by the upper limit value of charge power and the upper limit value of discharge power.
- Dividing unit 32 divides power target value Pb1 * by battery voltage Vb1 of power storage device 100, calculates current target value Ib1 * of power storage device 100, and outputs it to subtracting unit 34.
- the subtraction unit 34 calculates a current deviation ⁇ IL from the difference between the current target value Ib1 * and the current IL, and outputs it to the PI control unit 36.
- the PI control unit 36 generates a PI output corresponding to the current deviation ⁇ IL according to a predetermined proportional gain and integral gain, and outputs the PI output to the transfer function 38.
- the PI control unit 36 constitutes a current feedback control element.
- the PI control unit 36 includes a proportional element (P: proportional element), an integral element (I: integral element), and an adder.
- P proportional element
- I integral element
- the proportional element multiplies the current deviation ⁇ IL by a predetermined proportional gain Kp and outputs the result to the adder, and the integral element integrates the current deviation ⁇ IL with a predetermined integral gain Ki (integration time: 1 / Ki) to the adder.
- Ki integral gain
- the adder adds the outputs from the proportional element and the integral element to generate a PI output.
- This PI output corresponds to a feedback control amount for realizing current control.
- the PI control unit 36 generates a duty ratio command value Di for current control according to the sum of the feedback control amount and the feedforward control amount DiFF.
- Duty ratio command value Di is a control command that defines the on-duty of switching element Q2 (FIG. 1) of converter 110 in current control.
- feedforward control amount DiFF in current control is set according to a voltage difference between voltage command value VH * and voltage Vb ⁇ b> 1 of power storage device 100.
- Transfer function (Gi) 38 corresponds to the transfer function of converter 110 for power storage device 100 operating as a current source.
- FIG. 6 is a diagram illustrating a configuration example of a control block for realizing voltage control of converter 110 in control device 300.
- control device 300 has a voltage command value generation unit 40, a subtraction unit 42, a PI control unit 44, a transfer function (Gi) 38, as a configuration for controlling the voltage of converter 110.
- Voltage command value generation unit 40 sets voltage command value VH * based on the operating state of motor generators MG1, MG2. As described with reference to FIG. 2, voltage command value generation unit 40 calculates required minimum voltage VHmin from the operating state of motor generators MG1 and MG2, and calculates voltage command value VH * in consideration of the calculated required minimum voltage VHmin. Set.
- the subtraction unit 42 calculates a voltage deviation ⁇ VH from the difference between the voltage command value VH * and the system voltage VH, and outputs it to the PI control unit 44.
- the PI control unit 44 generates a PI output corresponding to the voltage deviation ⁇ VH according to a predetermined proportional gain and integral gain, and outputs the PI output to the transfer function 38.
- the PI control unit 44 constitutes a voltage feedback control element.
- the PI control unit 44 includes a proportional element, an integration element, and an addition unit.
- the proportional element multiplies the voltage deviation ⁇ VH by a predetermined proportional gain Kp and outputs the result to the adder, and the integral element integrates the voltage deviation ⁇ VH with a predetermined integral gain Ki (integration time: 1 / Ki) to the adder.
- Ki integral gain
- the adder adds the outputs from the proportional element and the integral element to generate a PI output. This PI output corresponds to a feedback control amount for realizing voltage control.
- the PI control unit 44 generates a duty ratio command value Dv for voltage control according to the sum of the feedback control amount and the feedforward control amount DvFF.
- Duty ratio command value Dv is a control command that defines the on-duty of switching element Q2 (FIG. 1) of converter 110 in voltage control.
- feedforward control amount DvFF in voltage control is set according to a voltage difference between voltage command value VH * and voltage Vb ⁇ b> 1 of power storage device 100.
- Transfer function (Gi) 38 and transfer function (Gv) 46 correspond to the transfer function of converter 110 for power storage device 100 operating as a voltage source.
- converter 110 performs voltage conversion operation according to current control in the first mode in which power storage device 150 is used, and voltage conversion operation according to voltage control in the second mode in which power storage device 150 is not used. To do. Therefore, every time the first mode and the second mode are switched, in the converter 110, the current control and the voltage control are switched and applied. Thereby, there is a possibility that the system voltage VH, which is the output voltage of the converter 110, varies at the timing when the control is switched.
- the output (integral term) of the integral element of the feedback control element in the control before switching is controlled by the control after switching.
- the PI control unit 36 determines the current IL based on a control calculation based on the current deviation ⁇ IL, typically, a proportional integration (PI) calculation according to the following equation (2).
- a feedback control amount ILfb is calculated.
- ILfb (P) is a proportional term
- ILfb (I) is an integral term.
- ⁇ IL is a current deviation in the current control cycle
- Kp and Ki are feedback gains.
- the control device 300 converts the integral term ILfb (I) in the equation (2) into the control block of FIG. Used as the initial value of the integral element in the PI control unit 44. That is, at the time of switching from current control to voltage control, the PI control unit 44 adds a value obtained by adding the product of the current deviation ⁇ IL and the integral gain Ki in the current control cycle to the integral term calculated in the previous control cycle. It is output as an integral term in the current control cycle.
- the integral term in the feedback control amount between the PI control unit 36 and the PI control unit 44 it is possible to prevent the feedback control amount from becoming discontinuous when the control is switched. Thereby, the occurrence of fluctuations in the system voltage VH can be avoided.
- FIG. 7 is a diagram illustrating a configuration example of a control block for realizing switching between current control and voltage control of the converter 110 in the control device 300.
- control device 300 includes a mode determination unit 50, a command value generation unit 52, a switching unit 54, a division unit 32, a subtraction unit 42, a PI control unit 44, a transfer function 38, 46 and switches SW1 and SW2.
- mode determination unit 50 When one of the first mode using power storage device 150 and the second mode not using power storage device 150 is selected according to the flowchart shown in FIG. 3, mode determination unit 50 follows the selected mode. One of current control and voltage control is selected. Mode determination unit 50 generates a signal indicating whether current control or voltage control is selected, and sends the signal to command value generation unit 52 and switching unit 54.
- the command value generation unit 52 generates one of the power target value Pb1 * and the voltage command value VH * according to the control selected by the mode determination unit 50. Specifically, when current control is selected, command value generation unit 52 calculates power target value Pb1 * of power storage device 100 within a power range in which power storage device 100 can be charged and discharged. On the other hand, when voltage control is selected, command value generation unit 52 sets voltage command value VH * based on the operating state of motor generators MG1, MG2. That is, the command value generation unit 52 has the functions of the power target value generation unit 30 shown in FIG. 5 and the voltage command value generation unit 40 shown in FIG.
- the subtraction unit 42, the PI control unit 44, the transfer function (Gi) 38, and the transfer function (Gv) 46 form a voltage feedback loop for controlling the voltage of the converter 110.
- This voltage feedback loop has the same control structure as the control block shown in FIG.
- the subtraction unit 42 calculates the voltage deviation ⁇ VH from the difference between the voltage command value VH * and the system voltage VH, and outputs it to the PI control unit 44.
- PI control unit 44 includes a voltage control calculation unit 440, a subtraction unit 34, and a current control calculation unit 442.
- the voltage control calculation unit 440 uses the voltage deviation ⁇ VH to execute a control calculation (proportional integration calculation) for making the system voltage VH coincide with the voltage command value VH *. Then, voltage control calculation unit 440 outputs the calculated control amount as current command value IL *. That is, voltage control calculation unit 440 generates a current command value IL * corresponding to voltage deviation ⁇ VH by executing a control calculation for making system voltage VH coincide with voltage command value VH *.
- the subtraction unit 34 calculates a current deviation ⁇ IL from the difference between the current command value IL * output from the voltage control calculation unit 440 and the current IL, and outputs it to the current control calculation unit 442.
- the current control calculation unit 442 executes a control calculation (proportional integration calculation) for making the current IL coincide with the current command value IL * using the current deviation ⁇ IL. Then, the current control calculation unit 442 generates a duty ratio command value D for voltage control according to the sum of the calculated control amount and the feedforward control amount. That is, current control calculation unit 442 executes a control calculation for matching current IL with current command value IL * by setting PI output of voltage control calculation unit 440 as current command value IL * of current IL. Thus, when a deviation of the system voltage VH from the current command value VH * occurs, the current command value IL * is corrected so as to eliminate the deviation, and current control is executed so that the current IL matches the current command value IL *. Is done.
- the subtraction unit 42, the current control calculation unit 442, the subtraction unit 34, the current control calculation unit 442, and the transfer functions 38 and 46 make the system voltage VH coincide with the voltage command value VH *.
- the subtracting unit 34, the current control calculation unit 442, and the transfer function 38 form a minor loop for making the current IL coincide with the current command value IL *.
- the control device 300 causes the minor loop to function as a current feedback loop for controlling the current of the converter 110 by adding the division unit 32 to the minor loop.
- This current feedback loop has the same control structure as the control block shown in FIG.
- division unit 32 divides power target value Pb1 * by battery voltage Vb1 of power storage device 100, calculates current target value Ib1 * of power storage device 100, and outputs the result to subtraction unit 34.
- the subtraction unit 34 calculates a current deviation ⁇ IL from the difference between the current target value Ib1 * and the current IL, and outputs the current deviation ⁇ IL to the current control calculation unit 442.
- the current control calculation unit 442 executes a control calculation (proportional integration calculation) for making the current IL coincide with the current command value IL * using the current deviation ⁇ IL. Then, the current control calculation unit 442 generates a duty ratio command value D for current control according to the sum of the calculated control amount and the feedforward control amount. That is, current control calculation unit 442 executes a control calculation for matching current IL with current command value IL *, using current IL calculated from power target value Pb1 * as voltage command value IL *.
- current command value IL * is corrected so as to eliminate the deviation, and current IL matches current command value IL *. Current control is executed at the same time.
- the switch SW1 is provided between the subtraction unit 42 and the voltage control calculation unit 440 in the voltage feedback loop.
- the switch SW2 is provided between the division unit 32 and the subtraction unit 34 in the current feedback loop. ON / OFF of the switches SW1 and SW2 is controlled according to a control signal from the switching unit 54, respectively.
- the switching unit 54 generates a control signal for turning on and off the switches SW1 and SW2 in accordance with the control selected by the mode determination unit 50.
- the switching unit 54 When the current control is selected by the mode determination unit 50, the switching unit 54 generates a control signal so as to turn on the switch SW2 while turning off the switch SW1. Thereby, at the time of current control, the division unit 32 and the subtraction unit 34 are connected, and the above-described current feedback loop is formed.
- the switching unit 54 when the voltage control is selected by the mode determination unit 50, the switching unit 54 generates a control signal so as to turn off the switch SW2 while turning on the switch SW1. Thereby, at the time of voltage control, the subtraction part 42 and the voltage control calculation part 440 are connected, and the voltage feedback loop mentioned above is formed.
- the current control calculation unit 442 controls the current deviation ⁇ IL before switching.
- the control amount (integral term) calculated by the calculation can be taken over as the initial value of the control amount (integral term) calculated by the current control calculation unit 442 by the control calculation of the current deviation ⁇ IL after switching.
- the voltage control calculation unit 440 At the time of switching from voltage control to current control, in addition to taking over the control amount (integral term) in the current control calculation unit 442 as the initial value of the control amount in current control, the voltage control calculation unit 440 The final value of the output current command value IL * can be taken over by the current control calculation unit 442. As a result, it is possible to avoid fluctuations in the system voltage VH even when switching from the second mode to the first mode.
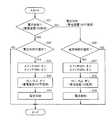
- FIG. 8 is a flowchart showing a processing procedure of the control device 300 for realizing the switching between the current control and the voltage control of the converter 110 described above.
- Each step of the flowchart shown in FIG. 8 is basically realized by software processing by the control device 300, but may be realized by hardware processing by an electronic circuit or the like provided in the control device 300.
- control device 300 determines in step S21 whether or not the first mode using power storage device 150 is selected, that is, whether or not converter 110 is controlled according to current control. To do.
- control device 300 When the first mode is selected, that is, when converter 110 is controlled in accordance with current control (when YES is determined in step S21), control device 300 subsequently performs second mode in step S22. Is selected, that is, whether or not voltage control is selected. If the second mode has not been selected (NO in step S22), the process is terminated without performing the subsequent control switching process.
- control device 300 turns on switch SW1 while switching switch SW2 in step S23.
- a control signal is generated so as to be turned off, and is output to the switches SW1 and SW2. Further, control device 300 proceeds to step S24 to turn off relays RL1 and RL2.
- control device 300 controls converter 110 according to voltage control in step S25.
- control device 300 subsequently performs step S26. Then, it is determined whether or not the first mode is selected, that is, whether or not the current control is selected. If the first mode has not been selected (NO in step S26), the process is terminated without performing the subsequent control switching process.
- control device 300 turns off switch SW1 while switching switch SW2 in step S27.
- a control signal is generated so as to be turned on, and is output to the switches SW1 and SW2. Further, control device 300 advances the process to step S28 to turn on relays RL1 and RL2.
- control device 300 controls converter 110 according to current control in step S29.
- the power shared by power storage device 100 is predetermined.
- the charge / discharge power of power storage device 150 can also be indirectly controlled.
- power can be supplied to the load by using power storage devices 100 and 150 cooperatively.
- the power supply system can be reduced in size and efficiently configured at low cost.
- the output (integration term) of the integration element of the feedback control elements in the control before switching is used.
- the initial value of the integral element among the feedback control elements in the control after switching it is possible to avoid occurrence of fluctuations in the system voltage VH when switching control.
- the configuration of the load 10 (that is, the drive system) of the electric vehicle 5 shown in FIG. 1 is not limited to the illustrated configuration. That is, the present invention can be commonly applied to electric vehicles equipped with a traveling motor such as an electric vehicle and a fuel cell vehicle. Furthermore, the load 10 is not limited to the drive system that generates the driving force of the vehicle, but it is described as confirming that the load 10 can be applied to an apparatus that consumes power.
- the present invention can be applied to a power supply system equipped with a plurality of power storage devices.
Abstract
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201180073644.8A CN103828173B (zh) | 2011-09-27 | 2011-09-27 | 电源系统及其控制方法 |
| PCT/JP2011/071987 WO2013046314A1 (fr) | 2011-09-27 | 2011-09-27 | Système d'alimentation électrique et procédé de commande de celui-ci |
| US14/347,102 US9236736B2 (en) | 2011-09-27 | 2011-09-27 | Power supply system and method for controlling the same |
| EP11873344.3A EP2763270B1 (fr) | 2011-09-27 | 2011-09-27 | Système d'alimentation électrique et procédé de commande de celui-ci |
| JP2013535673A JP5751334B2 (ja) | 2011-09-27 | 2011-09-27 | 電源システムおよびその制御方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2011/071987 WO2013046314A1 (fr) | 2011-09-27 | 2011-09-27 | Système d'alimentation électrique et procédé de commande de celui-ci |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2013046314A1 true WO2013046314A1 (fr) | 2013-04-04 |
Family
ID=47994431
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2011/071987 WO2013046314A1 (fr) | 2011-09-27 | 2011-09-27 | Système d'alimentation électrique et procédé de commande de celui-ci |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9236736B2 (fr) |
| EP (1) | EP2763270B1 (fr) |
| JP (1) | JP5751334B2 (fr) |
| CN (1) | CN103828173B (fr) |
| WO (1) | WO2013046314A1 (fr) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015104200A1 (fr) * | 2014-01-10 | 2015-07-16 | Robert Bosch Gmbh | Composite accumulateur électrochimique |
| KR20150109523A (ko) * | 2014-03-19 | 2015-10-02 | 삼성전기주식회사 | 전원 공급 장치 |
| JP2016039675A (ja) * | 2014-08-06 | 2016-03-22 | 株式会社デンソー | Dcdcコンバータ |
| JP2016111730A (ja) * | 2014-12-02 | 2016-06-20 | トヨタ自動車株式会社 | 電源システム |
Families Citing this family (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9190899B2 (en) * | 2011-09-28 | 2015-11-17 | General Electric Company | Power factor correction (PFC) circuit configured to control high pulse load current and inrush current |
| WO2016020717A1 (fr) * | 2014-08-08 | 2016-02-11 | Toyo System Co., Ltd. | Dispositif de commande à rétroaction |
| US9762164B2 (en) * | 2015-09-18 | 2017-09-12 | Faraday & Future Inc. | Methods and apparatus for generating current commands for an interior permanent magnet (IPM) motor |
| US9768719B2 (en) * | 2015-09-18 | 2017-09-19 | Faraday&Future Inc. | Methods and apparatus for generating current commands for an interior permanent magnet (IPM) motor |
| DE102015220223A1 (de) * | 2015-10-16 | 2017-04-20 | Zf Friedrichshafen Ag | Begrenzung des Stromgradienten bei Lastabwurf |
| JP6458756B2 (ja) * | 2016-03-22 | 2019-01-30 | トヨタ自動車株式会社 | 自動車 |
| JP6399045B2 (ja) * | 2016-06-16 | 2018-10-03 | トヨタ自動車株式会社 | 電圧制御システム、燃料電池システムおよび電圧制御システムの制御方法 |
| JP6790980B2 (ja) * | 2017-04-12 | 2020-11-25 | トヨタ自動車株式会社 | ハイブリッド車両及びその制御方法 |
| US10141855B2 (en) | 2017-04-12 | 2018-11-27 | Accion Systems, Inc. | System and method for power conversion |
| WO2019077958A1 (fr) * | 2017-10-17 | 2019-04-25 | 株式会社村田製作所 | Dispositif d'alimentation électrique, dispositif de commande de puissance et procédé de détermination de relais de dispositif d'alimentation électrique |
| WO2019244343A1 (fr) * | 2018-06-22 | 2019-12-26 | 三菱電機株式会社 | Dispositif de commande d'entraînement et dispositif d'entraînement pour wagons de chemin de fer |
| JP7163714B2 (ja) * | 2018-10-18 | 2022-11-01 | トヨタ自動車株式会社 | 車両の電源装置 |
| US20220014018A1 (en) * | 2019-05-10 | 2022-01-13 | Mitsubishi Electric Corporation | Dc power supply and distribution system |
| EP3973182A4 (fr) | 2019-05-21 | 2023-06-28 | Accion Systems, Inc. | Appareil d'émission par électronébulisation |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007135375A (ja) * | 2005-11-14 | 2007-05-31 | Nissan Motor Co Ltd | Dc/dcコンバータの制御装置 |
| JP2009089536A (ja) * | 2007-10-01 | 2009-04-23 | Toyota Motor Corp | 電源システム |
| JP2009159663A (ja) | 2007-12-25 | 2009-07-16 | Toyota Motor Corp | 電動機駆動装置、電動車両および電動機駆動装置の制御方法 |
| JP2010206912A (ja) | 2009-03-03 | 2010-09-16 | Hitachi Koki Co Ltd | 充電装置 |
| JP2010288346A (ja) | 2009-06-10 | 2010-12-24 | Toyota Motor Corp | 電動車両の電源システムおよび電動車両 |
| JP2011125144A (ja) * | 2009-12-10 | 2011-06-23 | Toyota Motor Corp | コンバータの制御装置 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08223907A (ja) * | 1995-02-06 | 1996-08-30 | Internatl Business Mach Corp <Ibm> | 電源装置及び電源供給方法 |
| JP4978082B2 (ja) * | 2006-03-31 | 2012-07-18 | トヨタ自動車株式会社 | 電源システムおよびそれを備えた車両 |
| JP4569603B2 (ja) | 2007-01-04 | 2010-10-27 | トヨタ自動車株式会社 | 電源システムおよびそれを備える車両、ならびにその制御方法 |
| JP4380772B2 (ja) * | 2007-10-16 | 2009-12-09 | トヨタ自動車株式会社 | 電源装置およびそれを備えた車両、電源装置の制御方法、ならびにその制御方法をコンピュータに実行させるためのプログラムを記録したコンピュータ読取可能な記録媒体 |
| CN101910524B (zh) * | 2007-12-26 | 2013-03-27 | 住友重机械工业株式会社 | 混合式施工机械及混合式施工机械的控制方法 |
| JP2010068576A (ja) | 2008-09-09 | 2010-03-25 | Toyota Motor Corp | コンバータ制御装置 |
| US8723490B2 (en) * | 2010-08-30 | 2014-05-13 | Intersil Americas Inc. | Controlling a bidirectional DC-to-DC converter |
-
2011
- 2011-09-27 WO PCT/JP2011/071987 patent/WO2013046314A1/fr active Application Filing
- 2011-09-27 JP JP2013535673A patent/JP5751334B2/ja active Active
- 2011-09-27 CN CN201180073644.8A patent/CN103828173B/zh active Active
- 2011-09-27 US US14/347,102 patent/US9236736B2/en active Active
- 2011-09-27 EP EP11873344.3A patent/EP2763270B1/fr active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007135375A (ja) * | 2005-11-14 | 2007-05-31 | Nissan Motor Co Ltd | Dc/dcコンバータの制御装置 |
| JP2009089536A (ja) * | 2007-10-01 | 2009-04-23 | Toyota Motor Corp | 電源システム |
| JP2009159663A (ja) | 2007-12-25 | 2009-07-16 | Toyota Motor Corp | 電動機駆動装置、電動車両および電動機駆動装置の制御方法 |
| JP2010206912A (ja) | 2009-03-03 | 2010-09-16 | Hitachi Koki Co Ltd | 充電装置 |
| JP2010288346A (ja) | 2009-06-10 | 2010-12-24 | Toyota Motor Corp | 電動車両の電源システムおよび電動車両 |
| JP2011125144A (ja) * | 2009-12-10 | 2011-06-23 | Toyota Motor Corp | コンバータの制御装置 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP2763270A4 * |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015104200A1 (fr) * | 2014-01-10 | 2015-07-16 | Robert Bosch Gmbh | Composite accumulateur électrochimique |
| CN105873794A (zh) * | 2014-01-10 | 2016-08-17 | 罗伯特·博世有限公司 | 电化学存储复合体 |
| US10232728B2 (en) | 2014-01-10 | 2019-03-19 | Robert Bosch Gmbh | Electrochemical composite storage system |
| KR20150109523A (ko) * | 2014-03-19 | 2015-10-02 | 삼성전기주식회사 | 전원 공급 장치 |
| KR101864466B1 (ko) * | 2014-03-19 | 2018-06-05 | 한국과학기술원 | 전원 공급 장치 |
| JP2016039675A (ja) * | 2014-08-06 | 2016-03-22 | 株式会社デンソー | Dcdcコンバータ |
| JP2016111730A (ja) * | 2014-12-02 | 2016-06-20 | トヨタ自動車株式会社 | 電源システム |
Also Published As
| Publication number | Publication date |
|---|---|
| CN103828173A (zh) | 2014-05-28 |
| JPWO2013046314A1 (ja) | 2015-03-26 |
| EP2763270B1 (fr) | 2016-05-25 |
| EP2763270A1 (fr) | 2014-08-06 |
| JP5751334B2 (ja) | 2015-07-22 |
| EP2763270A4 (fr) | 2015-02-25 |
| CN103828173B (zh) | 2016-05-04 |
| US20140225430A1 (en) | 2014-08-14 |
| US9236736B2 (en) | 2016-01-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5751334B2 (ja) | 電源システムおよびその制御方法 | |
| US8659182B2 (en) | Power supply system and electric powered vehicle including power supply system, and method for controlling power supply system | |
| US7859201B2 (en) | Charge control apparatus, electrically powered vehicle and electric storage charge control method | |
| US7486034B2 (en) | Power supply device for vehicle and method of controlling the same | |
| US9166515B2 (en) | Electrically powered vehicle and method for controlling the same | |
| US7755306B2 (en) | Electric power control device, electric powered vehicle including the same, and method for controlling electric power of electric vehicle | |
| US8674637B2 (en) | Vehicle | |
| US7969039B2 (en) | Method of controlling fuel cell vehicle and method of controlling DC/DC converter apparatus | |
| US20090314558A1 (en) | Voltage Conversion Apparatus and Vehicle Including the Same | |
| US20120049774A1 (en) | Control device for voltage converter, vehicle equipped with the same, and control method for voltage converter | |
| WO2007026942A1 (fr) | Module de regulation de charge et vehicule electrique | |
| JP2007290483A (ja) | 内燃機関の停止制御装置および停止制御方法 | |
| JP5320988B2 (ja) | 電源システムおよびその電力収支制御方法 | |
| JP2011166990A (ja) | 電源システム | |
| JP2013051831A (ja) | 電動車両の電源制御装置 | |
| JP2019054673A (ja) | 電源装置 | |
| JP2012110189A (ja) | 電動車両の電気システムおよびその制御方法 | |
| CN108482102B (zh) | 混合动力驱动系统 | |
| JP4590960B2 (ja) | 電動機駆動装置 | |
| JP2013055853A (ja) | 電動車両の電源制御装置 | |
| JP2013090410A (ja) | 電動車両 | |
| EP2080662B1 (fr) | Véhicule à pile à combustible et appareil convertisseur CC/CC | |
| JP2017171159A (ja) | ハイブリッド車両 | |
| JP2013059164A (ja) | 電動車両の電源制御装置 | |
| JP2012065479A (ja) | モータ駆動装置およびそれを搭載する車両 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| WWE | Wipo information: entry into national phase |
Ref document number: 201180073644.8 Country of ref document: CN |
|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 11873344 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2013535673 Country of ref document: JP Kind code of ref document: A |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 14347102 Country of ref document: US |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2011873344 Country of ref document: EP |