WO2011148471A1 - 風車の制御装置及び制御方法 - Google Patents
風車の制御装置及び制御方法 Download PDFInfo
- Publication number
- WO2011148471A1 WO2011148471A1 PCT/JP2010/058905 JP2010058905W WO2011148471A1 WO 2011148471 A1 WO2011148471 A1 WO 2011148471A1 JP 2010058905 W JP2010058905 W JP 2010058905W WO 2011148471 A1 WO2011148471 A1 WO 2011148471A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- windmill
- wind turbine
- alarm
- control
- shutdown sequence
- Prior art date
Links
- 238000000034 method Methods 0.000 title claims abstract description 17
- 230000004044 response Effects 0.000 claims abstract description 10
- 238000011084 recovery Methods 0.000 claims description 19
- 238000003780 insertion Methods 0.000 claims description 5
- 230000037431 insertion Effects 0.000 claims description 5
- 238000013459 approach Methods 0.000 claims description 4
- 230000007423 decrease Effects 0.000 description 5
- 230000007704 transition Effects 0.000 description 5
- 238000010586 diagram Methods 0.000 description 4
- 238000010248 power generation Methods 0.000 description 3
- 230000004913 activation Effects 0.000 description 2
- 238000001514 detection method Methods 0.000 description 2
- 230000008569 process Effects 0.000 description 2
- 101100100125 Mus musculus Traip gene Proteins 0.000 description 1
- 230000005856 abnormality Effects 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 230000002123 temporal effect Effects 0.000 description 1
- 230000001052 transient effect Effects 0.000 description 1
Images



Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F03—MACHINES OR ENGINES FOR LIQUIDS; WIND, SPRING, OR WEIGHT MOTORS; PRODUCING MECHANICAL POWER OR A REACTIVE PROPULSIVE THRUST, NOT OTHERWISE PROVIDED FOR
- F03D—WIND MOTORS
- F03D7/00—Controlling wind motors
- F03D7/02—Controlling wind motors the wind motors having rotation axis substantially parallel to the air flow entering the rotor
- F03D7/04—Automatic control; Regulation
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F03—MACHINES OR ENGINES FOR LIQUIDS; WIND, SPRING, OR WEIGHT MOTORS; PRODUCING MECHANICAL POWER OR A REACTIVE PROPULSIVE THRUST, NOT OTHERWISE PROVIDED FOR
- F03D—WIND MOTORS
- F03D7/00—Controlling wind motors
- F03D7/02—Controlling wind motors the wind motors having rotation axis substantially parallel to the air flow entering the rotor
- F03D7/0264—Controlling wind motors the wind motors having rotation axis substantially parallel to the air flow entering the rotor for stopping; controlling in emergency situations
- F03D7/0268—Parking or storm protection
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F03—MACHINES OR ENGINES FOR LIQUIDS; WIND, SPRING, OR WEIGHT MOTORS; PRODUCING MECHANICAL POWER OR A REACTIVE PROPULSIVE THRUST, NOT OTHERWISE PROVIDED FOR
- F03D—WIND MOTORS
- F03D7/00—Controlling wind motors
- F03D7/02—Controlling wind motors the wind motors having rotation axis substantially parallel to the air flow entering the rotor
- F03D7/0264—Controlling wind motors the wind motors having rotation axis substantially parallel to the air flow entering the rotor for stopping; controlling in emergency situations
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F05—INDEXING SCHEMES RELATING TO ENGINES OR PUMPS IN VARIOUS SUBCLASSES OF CLASSES F01-F04
- F05B—INDEXING SCHEME RELATING TO WIND, SPRING, WEIGHT, INERTIA OR LIKE MOTORS, TO MACHINES OR ENGINES FOR LIQUIDS COVERED BY SUBCLASSES F03B, F03D AND F03G
- F05B2270/00—Control
- F05B2270/10—Purpose of the control system
- F05B2270/107—Purpose of the control system to cope with emergencies
- F05B2270/1071—Purpose of the control system to cope with emergencies in particular sudden load loss
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02E—REDUCTION OF GREENHOUSE GAS [GHG] EMISSIONS, RELATED TO ENERGY GENERATION, TRANSMISSION OR DISTRIBUTION
- Y02E10/00—Energy generation through renewable energy sources
- Y02E10/70—Wind energy
- Y02E10/72—Wind turbines with rotation axis in wind direction
Definitions
- the present invention relates to control of a wind turbine for wind power generation, and more particularly to control during a shutdown sequence by an alarm.
- FIG. 1 is a side view showing a configuration example of a propeller type windmill used in a wind turbine generator.
- the windmill 11 includes a support 12 fixed to the ground and a nacelle 13 supported on the top of the support 12.
- a rotor head 14 is attached to one end of the nacelle 13.
- a plurality of wind turbine blades 15 are attached to the rotor head 14.
- the number of wind turbine blades 15 is usually three, and in this specification, a configuration having the three wind turbine blades 15 will be described.
- the control unit 16 controls the blade pitch angle of the wind turbine blade 15 so as to obtain a predetermined rotation speed and output according to the wind conditions. Further, when an alarm is detected, shutdown control is performed in order to quickly close the blade pitch angle of the windmill blade 15 and stop the windmill 11 quickly.
- a wind turbine When a wind turbine deviates from normal conditions due to external factors, it is necessary to stop until the external factors disappear. For example, when the wind speed exceeds a predetermined condition, when temperature, humidity, and system frequency fluctuations exceed a predetermined standard, when an abnormality occurs in voltage, or when vibration due to an earthquake occurs, etc. The wind turbine is stopped for safety in response to a sensor that detects and detects an alarm.
- the windmill is stopped as follows. During normal operation of the windmill, the windmill converts wind power into electric power. The generated electric power is converted into electric power having the same characteristics as the system power and frequency, and is collected in the whole wind farm to which a plurality of wind turbines belong, and is connected to the system power source.
- a shutdown sequence including a series of controls for completely stopping the wind power generation function of the wind turbine is started in response to a signal indicating the alarm.
- a brake that applies a braking force to the rotation of the windmill is activated, the pitch feathering operation starts, and the pitch operates from the fine side toward the feathering position.
- the rotational speed of the windmill gradually decreases.
- the windmill is disconnected from the wind farm power system and disconnected. Shutdown is completed with the windmill disconnected and the pitch at the feathering position.
- Patent Document 1 describes a method for controlling a wind power generation system when a system voltage drop or an overcurrent occurs in a system-side power converter.
- the present invention has been made to solve the above-described problems, and an object of the present invention is to provide a control device and a control method that suppress a decrease in operating rate due to a windmill shutdown.
- a first aspect of the present invention includes an alarm acquisition unit that acquires a signal indicating an alarm, a shutdown sequence storage unit that stores a series of operations from the start to stop of feathering of the windmill as a shutdown sequence, and an alarm
- the shutdown start unit for starting the shutdown sequence, and when the alarm is canceled during the shutdown sequence, the shutdown sequence is stopped and the pitch angle of the windmill blade is controlled to be fine.
- It is a control apparatus of a windmill provided with the recovery part which performs recovery control.
- the wind turbine stop time can be reduced compared to the conventional technology in which the wind turbine is started after resetting until the shutdown is completed. Can be shortened.
- the windmill when the windmill is disconnected in the recovery control, after the control is started so that the pitch angle of the blades approaches fine, the windmill is turned on when the rotational speed of the windmill exceeds a predetermined insertion standard. It is good also as a control apparatus of the windmill to enter.
- the shutdown sequence starts the windmill feathering, then performs a windmill disconnection when the windmill speed falls below a predetermined reference, and then stops the windmill control. It is good also as an apparatus.
- a process of obtaining a signal indicating an alarm and a shutdown sequence indicating a series of operations from the start to the stop of wind turbine feathering in response to the signal indicating the alarm And a recovery method for performing a recovery control for controlling the pitch angle of the blades of the windmill to be fine when the alarm is canceled in the middle of the shutdown sequence.
- the wind turbine control method starts control so that the pitch angle of the blades approaches fine, and then the rotational speed of the wind turbine satisfies a predetermined insertion standard. It is good also as a control method which inserts a windmill when it exceeds.
- the shutdown sequence may be a control method in which the windmill feathering is started, then the windmill is disconnected when the rotational speed of the windmill falls below a predetermined reference, and then the windmill is stopped.
- the wind turbine stop time due to the wind turbine shutdown can be shortened, and the effect of suppressing the decrease in the operating rate of the wind farm is achieved.
- FIG. 1 shows the appearance of a windmill.
- FIG. 2 is a state transition diagram of a conventional wind turbine.
- FIG. 3 shows a wind turbine control apparatus according to an embodiment of the present invention.
- FIG. 4 is a state transition diagram of the windmill in the embodiment of the present invention.
- FIG. 5 is a threshold value and sequence flow showing from the shutdown to the return of operation after the alarm is released in the embodiment of the present invention.
- FIG. 6 is a timing chart showing the temporal change rule of the operation control factor before and after the period from the alarm occurrence to the alarm release in the embodiment of the present invention.
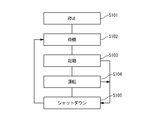
- Fig. 2 is a windmill state transition diagram.
- the windmill shifts from a state where it has been stopped and removed from control (S101) to a standby state (S102).
- the windmill is activated (S103).
- an alarm signal indicating a minor alarm is generated based on the detection result of an external factor during startup
- the wind turbine enters a shutdown sequence (S105).
- the windmill is normally activated, the windmill is driven with the pitch being driven toward the fine side (S104).
- an alarm signal indicating an alarm is generated based on a detection result of an external factor during startup, the wind turbine enters a shutdown sequence (S105).
- the wind turbine enters a standby state (S102) after the shutdown is completed, and waits for an activation command.
- the wind turbine can be restarted if the alarm factor is restored. Therefore, it is possible to improve the operating rate by reducing the wind turbine stop time.
- FIG. 3 shows a wind turbine control device according to an embodiment of the present invention that can improve the operating rate.
- the control device 1 mounted on the control unit 16 of the windmill 11 includes an alarm acquisition unit 2, a shutdown sequence storage unit 3, a shutdown start unit 4, and a recovery unit 5.
- Each of these units is a functional block realized by the CPU reading and executing a program stored in the storage device.
- the alarm acquisition unit 2 acquires a signal indicating an alarm, and generates a signal instructing shutdown of the windmill in response to the alarm signal.
- an alarm signal is generated when a minor external factor that can be recovered in a short time occurs.
- the shutdown sequence storage unit 3 stores a shutdown sequence (or trip sequence) performed in response to a signal for instructing shutdown.
- the shutdown sequence is performed as follows.
- the windmill during normal operation is controlled so that the pitch of its blades is on the fine side where wind power can be converted into torque most efficiently.
- Wind turbines are rotated by wind power, and the generator of the wind turbine generates electric power by the rotation.
- the electric power is converted into the same kind of electric power as the system power supply.
- Wind turbines operating normally among a plurality of wind turbines belonging to the wind farm are incorporated in the power system of the wind farm, and the electric power is collected throughout the wind farm and linked to the system power supply.
- the windmill includes a hydraulic system that applies a braking force to its rotation. Electric power is supplied to the hydraulic system during normal operation.
- the electromagnetic valve controls the hydraulic brake to the open state by the electric power, and the brake is not effective. After disconnection, power supply to the hydraulic system is cut off.
- the supply of power to the solenoid valve is stopped, the oil in the accumulator is supplied to the brake and the hydraulic brake is activated, and a constant braking force is applied to the rotation of the windmill.
- the shutdown sequence start unit 4 stores a reference value of the first rotational speed in advance, and when the rotational speed of the windmill falls below a predetermined standard, the wind farm group of the wind farm generates a power system of the generator of the windmill. Disconnect from the power grid. In addition to such control, there is a case where control that immediately disconnects when a shutdown sequence is started may be employed.
- Disengagement is performed, and the wind turbine rotates or stops in a state where the rotation is suppressed by the hydraulic brake.
- the state in which the rotation is stopped or stopped in a state where the rotation is suppressed is “stop” in S1 and the like in FIG.
- the shutdown sequence storage unit 3 stores the shutdown procedure as in the above example.
- the alarm acquisition unit 2 acquires the alarm signal
- the shutdown sequence start unit 4 starts the shutdown sequence in response to the alarm signal.
- the control device 1 Based on the information in the shutdown sequence storage unit 3, the control device 1 automatically and sequentially performs a series of operations from the start to the stop of the windmill feathering.
- FIG. 5 shows the operation of the recovery unit 5.
- the recovery unit 5 monitors the state of the alarm signal (S10). While the alarm factor is not recovered, the recovery unit performs standby processing (S11 NO). When the alarm factor is restored (S11 YES), the pitch feathering is stopped. At this point, control for moving the pitch to the fine side may be started (S12). If it is recognized by the insertion / disconnection flag that the generator of the windmill is incorporated in the system (S13 YES), the restoration unit 5 shifts the windmill to the operation state (S14).
- the recovery unit 5 shifts the wind turbine to the start state (S15) and turns the pitch toward the fine side. (S16). Accordingly, the rotational speed of the windmill gradually increases. Until the rotation speed of the windmill reaches a predetermined combined rotation speed, the recovery unit 5 performs a standby process (NO in S17). When the rotational speed of the windmill reaches the combined rotational speed (S17 YES), the recovery unit 5 inserts the windmill into the system (S18). This control completes the transition to the operation state (S19).
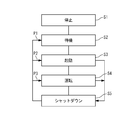
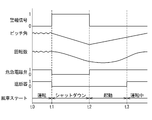
- the control in this embodiment will be described with reference to the state transition diagram of FIG. 4 and the timing chart of FIG.
- the windmill is immediately disconnected when an alarm occurs.
- the control from the state in which the windmill is stopped (S1) to the standby state (S2), further activated (S3) to the operation state (S4) is the same as the reference example described in FIG.
- the standby state is controlled (S2).
- the operation state is shown from time t0 to t1. In this state, no alarm signal is output.
- the pitch angle is the fine side.
- the number of revolutions is largely determined according to the wind power. Electric power is supplied to the emergency solenoid valve for braking the windmill, and control is performed so that no braking force is applied.
- the windmill receives wind power and generates torque, and the generator converts the torque into electric power.
- a warning signal such as a power failure occurs, and the warning acquisition unit 2 in FIG. 3 acquires the warning signal.
- the shutdown start unit 4 starts a shutdown sequence using an alarm signal as a trigger (S5).
- the windmill is immediately disconnected from the wind farm power system.
- the pitch angle is controlled toward the feathering side.
- the emergency brake is activated, and a braking force is applied to the rotation of the windmill. As a result, the rotational speed gradually decreases.
- control is performed toward the activated state (S3) through the path P2 in FIG.
- the recovery unit 5 interrupts the shutdown sequence and enters the startup sequence.
- power is supplied to the emergency solenoid valve and braking is stopped.
- the pitch of the blade is controlled toward the fine side.
- the rotational speed of the windmill gradually increases.
- the restoration unit 5 inserts the windmill into the power system of the wind farm, and the windmill enters the operating state (S4).
- the alarm is immediately disconnected at the time of alarm.
- the alarm may be canceled before the windmill is disconnected.
- the restoration unit 5 shifts the windmill to the driving state (S4) via the route P3 in FIG.
Landscapes
- Engineering & Computer Science (AREA)
- Life Sciences & Earth Sciences (AREA)
- Sustainable Development (AREA)
- Sustainable Energy (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Wind Motors (AREA)
Abstract
Description
本発明の第1の態様は、警報を示す信号を取得する警報取得部と、風車のフェザリングを開始してから停止するまでの一連の動作をシャットダウンシーケンスとして記憶するシャットダウンシーケンス記憶部と、警報を示す信号に応答して、シャットダウンシーケンスを開始するシャットダウン開始部と、シャットダウンシーケンスの途中で警報が解除されたとき、シャットダウンシーケンスを中止して風車のブレードのピッチ角度がファインとなるように制御する復旧制御を行う復旧部とを備える風車の制御装置である。
2 警報取得部
3 シャットダウンシーケンス記憶部
4 シャットダウン開始部
5 復旧部
11 風車
12 支柱
13 ナセル
14 ロータヘッド
15 風車ブレード
16 制御部
Claims (6)
- 警報を示す信号を取得する警報取得部と、
風車のフェザリングを開始してから停止するまでの一連の動作をシャットダウンシーケンスとして記憶するシャットダウンシーケンス記憶部と、
前記警報を示す信号に応答して、前記シャットダウンシーケンスを開始するシャットダウン開始部と、
前記シャットダウンシーケンスの途中で前記警報が解除されたとき、前記シャットダウンシーケンスを中止して前記風車のブレードのピッチ角度がファインとなるように制御する復旧制御を行う復旧部
とを具備する風車の制御装置。 - 請求項1に記載された風車の制御装置であって、
前記復旧制御において前記風車が解列されていたとき、前記ブレードのピッチ角度がファインに近づくように制御を開始した後、前記風車の回転数が所定の併入基準を上回ったときに前記風車を併入する
風車の制御装置。 - 請求項1又は2に記載された風車の制御装置であって、
前記シャットダウンシーケンスは、前記風車のフェザリングを開始し、次いで前記風車の回転数が所定の基準を下回ったら前記風車の解列を行い、次いで前記風車の制御を停止する動作である
風車の制御装置。 - 警報を示す信号を取得する工程と、
前記警報を示す信号に応答して、風車のフェザリングを開始してから停止するまでの一連の動作を示すシャットダウンシーケンスを開始する工程と、
前記シャットダウンシーケンスの途中で前記警報が解除されたとき、前記シャットダウンシーケンスを中止して前記風車のブレードのピッチ角度がファインとなるように制御する復旧制御を行う工程
とを有する風車の制御方法。 - 請求項4に記載された風車の制御方法であって、
更に、前記復旧制御において前記風車が解列されていたとき、前記ブレードのピッチがファインに近づくように制御を開始した後、前記風車の回転数が所定の併入基準を上回ったときに前記風車を併入する工程
を更に有する風車の制御方法。 - 請求項4又は5に記載された風車の制御方法であって、
前記シャットダウンシーケンスは、前記風車のフェザリングを開始し、次いで前記風車の回転数が所定の基準を下回ったら前記風車の解列を行い、次いで前記風車の制御を停止する動作である
風車の制御方法。
Priority Applications (9)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020117011695A KR101280157B1 (ko) | 2010-05-26 | 2010-05-26 | 풍차의 제어 장치 및 제어 방법 |
| CN201080003341.4A CN102356235B (zh) | 2010-05-26 | 2010-05-26 | 风车的控制装置和控制方法 |
| PCT/JP2010/058905 WO2011148471A1 (ja) | 2010-05-26 | 2010-05-26 | 風車の制御装置及び制御方法 |
| AU2010276473A AU2010276473B2 (en) | 2010-05-26 | 2010-05-26 | Device and method for controlling wind turbine |
| CA2730449A CA2730449C (en) | 2010-05-26 | 2010-05-26 | Device and method for controlling wind turbine |
| EP10735171.0A EP2578877B1 (en) | 2010-05-26 | 2010-05-26 | Windmill control device and control method |
| JP2010525558A JP5079094B2 (ja) | 2010-05-26 | 2010-05-26 | 風車の制御装置及び制御方法 |
| BRPI1005396A BRPI1005396A2 (pt) | 2010-05-26 | 2010-05-26 | aparelho e método de controle de uma turbina eólica |
| US12/850,204 US8109723B2 (en) | 2010-05-26 | 2010-08-04 | Device and method for controlling wind turbine |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2010/058905 WO2011148471A1 (ja) | 2010-05-26 | 2010-05-26 | 風車の制御装置及び制御方法 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US12/850,204 Continuation US8109723B2 (en) | 2010-05-26 | 2010-08-04 | Device and method for controlling wind turbine |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2011148471A1 true WO2011148471A1 (ja) | 2011-12-01 |
Family
ID=45003479
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2010/058905 WO2011148471A1 (ja) | 2010-05-26 | 2010-05-26 | 風車の制御装置及び制御方法 |
Country Status (9)
| Country | Link |
|---|---|
| US (1) | US8109723B2 (ja) |
| EP (1) | EP2578877B1 (ja) |
| JP (1) | JP5079094B2 (ja) |
| KR (1) | KR101280157B1 (ja) |
| CN (1) | CN102356235B (ja) |
| AU (1) | AU2010276473B2 (ja) |
| BR (1) | BRPI1005396A2 (ja) |
| CA (1) | CA2730449C (ja) |
| WO (1) | WO2011148471A1 (ja) |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102010050591A1 (de) * | 2010-11-05 | 2012-05-10 | Eads Deutschland Gmbh | Windpark, Windenergieanlage in einem Windpark, sowie Betriebssteuerung hierfür |
| KR101588640B1 (ko) | 2014-08-29 | 2016-01-26 | 삼성중공업 주식회사 | 블레이드 피치 제어 방법 |
| US10337496B2 (en) | 2014-12-01 | 2019-07-02 | General Electric Company | System and method for controlling a wind turbine during adverse wind conditions |
| JP6358993B2 (ja) * | 2015-09-11 | 2018-07-18 | 三菱重工業株式会社 | 風力発電装置および風力発電装置の併入方法 |
| JP6351557B2 (ja) | 2015-09-11 | 2018-07-04 | 三菱重工業株式会社 | 荷重計測装置の較正方法、風車翼の荷重計測システム及び風車 |
| CN110870156B (zh) | 2017-07-14 | 2023-09-22 | 通用电气公司 | 针对风电场停机之后的快速连接的操作风电场的系统和方法 |
| JP7436198B2 (ja) * | 2019-12-24 | 2024-02-21 | ファナック株式会社 | 制御装置及びプログラム |
| EP4179362B1 (en) * | 2020-07-13 | 2024-07-03 | General Electric Renovables España S.L. | System comprising a wind turbine and method for operating the system |
| CN114320742A (zh) * | 2020-10-12 | 2022-04-12 | 北京三力新能科技有限公司 | 一种多叶轮风电系统使用的启动和停机方法 |
| EP4092263A1 (en) * | 2021-05-18 | 2022-11-23 | Siemens Gamesa Renewable Energy A/S | Reducing seismic loads that act on a wind turbine |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006233912A (ja) * | 2005-02-25 | 2006-09-07 | Mitsubishi Heavy Ind Ltd | 風力発電装置及びその制御方法並びにブレードピッチ角制御方法 |
| JP2007291976A (ja) * | 2006-04-26 | 2007-11-08 | Nabtesco Corp | 風車のピッチ駆動装置 |
| JP2008283747A (ja) | 2007-05-09 | 2008-11-20 | Hitachi Ltd | 風力発電システムおよびその制御方法 |
| JP4365394B2 (ja) * | 2006-09-20 | 2009-11-18 | 株式会社日立製作所 | 風力発電システムおよびその運転方法 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4161658A (en) * | 1978-06-15 | 1979-07-17 | United Technologies Corporation | Wind turbine generator having integrator tracking |
| US4565929A (en) * | 1983-09-29 | 1986-01-21 | The Boeing Company | Wind powered system for generating electricity |
| DK174411B1 (da) * | 2001-12-19 | 2003-02-17 | Vestas Wind Sys As | Metode til kontrol af vindturbine under perioder med afbrydelse af elnettet |
| CA2542437C (en) * | 2003-10-24 | 2011-09-13 | Shinko Electric Co., Ltd. | Power supply unit, generator, and wind turbine generator |
| ES2265771B1 (es) * | 2005-07-22 | 2008-01-16 | GAMESA INNOVATION & TECHNOLOGY, S.L. | Metodo para mantener operativos los componentes de una turbina eolica y una turbina eolica con componentes que permitan el mantenimiento operativo. |
| US7843077B2 (en) * | 2007-05-16 | 2010-11-30 | Arduini Douglas P | Pulsed energy transfer |
| JP4914294B2 (ja) * | 2007-06-05 | 2012-04-11 | 富士重工業株式会社 | 水平軸風車 |
| US8240990B2 (en) * | 2007-12-06 | 2012-08-14 | General Electric Company | Apparatus and method for reducing asymmetric rotor loads in wind turbines during shutdown |
-
2010
- 2010-05-26 CA CA2730449A patent/CA2730449C/en not_active Expired - Fee Related
- 2010-05-26 CN CN201080003341.4A patent/CN102356235B/zh active Active
- 2010-05-26 BR BRPI1005396A patent/BRPI1005396A2/pt not_active IP Right Cessation
- 2010-05-26 AU AU2010276473A patent/AU2010276473B2/en not_active Ceased
- 2010-05-26 EP EP10735171.0A patent/EP2578877B1/en active Active
- 2010-05-26 WO PCT/JP2010/058905 patent/WO2011148471A1/ja active Application Filing
- 2010-05-26 KR KR1020117011695A patent/KR101280157B1/ko not_active IP Right Cessation
- 2010-05-26 JP JP2010525558A patent/JP5079094B2/ja not_active Expired - Fee Related
- 2010-08-04 US US12/850,204 patent/US8109723B2/en not_active Expired - Fee Related
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006233912A (ja) * | 2005-02-25 | 2006-09-07 | Mitsubishi Heavy Ind Ltd | 風力発電装置及びその制御方法並びにブレードピッチ角制御方法 |
| JP2007291976A (ja) * | 2006-04-26 | 2007-11-08 | Nabtesco Corp | 風車のピッチ駆動装置 |
| JP4365394B2 (ja) * | 2006-09-20 | 2009-11-18 | 株式会社日立製作所 | 風力発電システムおよびその運転方法 |
| JP2008283747A (ja) | 2007-05-09 | 2008-11-20 | Hitachi Ltd | 風力発電システムおよびその制御方法 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP2578877A4 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2578877B1 (en) | 2017-09-20 |
| KR101280157B1 (ko) | 2013-06-28 |
| CA2730449A1 (en) | 2011-11-26 |
| CN102356235A (zh) | 2012-02-15 |
| JP5079094B2 (ja) | 2012-11-21 |
| JPWO2011148471A1 (ja) | 2013-07-25 |
| EP2578877A1 (en) | 2013-04-10 |
| AU2010276473A1 (en) | 2011-12-15 |
| US20110293418A1 (en) | 2011-12-01 |
| AU2010276473B2 (en) | 2012-11-29 |
| CA2730449C (en) | 2013-07-16 |
| BRPI1005396A2 (pt) | 2016-03-08 |
| CN102356235B (zh) | 2014-01-01 |
| EP2578877A4 (en) | 2014-07-02 |
| KR20120008485A (ko) | 2012-01-30 |
| US8109723B2 (en) | 2012-02-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5079094B2 (ja) | 風車の制御装置及び制御方法 | |
| US10243352B2 (en) | Battery-supported braking system for a wind turbine | |
| EP2267303B1 (en) | Apparatus for operating a wind turbine during a loss of communication | |
| EP2270331B1 (en) | Wind turbine with control means to manage power during grid faults | |
| JP6165644B2 (ja) | ウィンドファームおよびその運転方法 | |
| EP3530933B1 (en) | Method and system for controlling wind turbine shutdown | |
| EP3394428B1 (en) | Wind turbine system with time distributed transitions | |
| JP2009523208A (ja) | 風力発電装置の作動方法および風力発電装置 | |
| CN112761874B (zh) | 安全停机方法、系统和风力发电机 | |
| RU2626901C2 (ru) | Ветряная электростанция и способ управления ветряной электростанцией | |
| CN103080483B (zh) | 用于控制涡轮机组的方法 | |
| KR20120018328A (ko) | 풍력 발전기용 블레이드 각 조절 구동 장치 | |
| CN112963304A (zh) | 一种包含转矩控制的风电机组超速保护辅助控制方法 | |
| JP6482926B2 (ja) | 風力発電装置またはウィンドファーム | |
| CN105556065A (zh) | 用于检查单轴设施的超转速保护装置的方法 | |
| JP5194175B2 (ja) | 火力発電所を制御する方法及びデバイス | |
| CN108291525A (zh) | 电网故障后恢复期间风力涡轮机的控制 | |
| KR20150019463A (ko) | 풍력발전 단지 제어 장치 및 시스템 | |
| CN105264182B (zh) | 用于测试燃气和蒸汽轮机联合循环单轴装置的超速保护装置的方法 | |
| Jauch et al. | Simulation model of a transient fault controller for an active-stall wind turbine | |
| CN217712803U (zh) | 失速型风电机组及其安全保护装置 | |
| Bennauer et al. | Optimized steam turbine governor controlling single or multiple grid faults | |
| KR20150007022A (ko) | 풍력 발전용 안전 백업 시스템 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| WWE | Wipo information: entry into national phase |
Ref document number: 201080003341.4 Country of ref document: CN |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2010525558 Country of ref document: JP |
|
| REEP | Request for entry into the european phase |
Ref document number: 2010735171 Country of ref document: EP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2010735171 Country of ref document: EP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2010276473 Country of ref document: AU |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2730449 Country of ref document: CA |
|
| ENP | Entry into the national phase |
Ref document number: 20117011695 Country of ref document: KR Kind code of ref document: A |
|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 10735171 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |