WO2010052930A1 - Moteur et dispositif de commande de moteur - Google Patents
Moteur et dispositif de commande de moteur Download PDFInfo
- Publication number
- WO2010052930A1 WO2010052930A1 PCT/JP2009/005944 JP2009005944W WO2010052930A1 WO 2010052930 A1 WO2010052930 A1 WO 2010052930A1 JP 2009005944 W JP2009005944 W JP 2009005944W WO 2010052930 A1 WO2010052930 A1 WO 2010052930A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- motor
- salient
- poles
- inverter
- armature
- Prior art date
Links
Images

















Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P27/00—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage
- H02P27/04—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage
- H02P27/06—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using dc to ac converters or inverters
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K29/00—Motors or generators having non-mechanical commutating devices, e.g. discharge tubes or semiconductor devices
- H02K29/03—Motors or generators having non-mechanical commutating devices, e.g. discharge tubes or semiconductor devices with a magnetic circuit specially adapted for avoiding torque ripples or self-starting problems
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K3/00—Details of windings
- H02K3/04—Windings characterised by the conductor shape, form or construction, e.g. with bar conductors
- H02K3/28—Layout of windings or of connections between windings
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K21/00—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets
- H02K21/12—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets with stationary armatures and rotating magnets
- H02K21/14—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets with stationary armatures and rotating magnets with magnets rotating within the armatures
- H02K21/16—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets with stationary armatures and rotating magnets with magnets rotating within the armatures having annular armature cores with salient poles
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K41/00—Propulsion systems in which a rigid body is moved along a path due to dynamo-electric interaction between the body and a magnetic field travelling along the path
- H02K41/02—Linear motors; Sectional motors
- H02K41/03—Synchronous motors; Motors moving step by step; Reluctance motors
Definitions
- the present invention relates to a permanent magnet field type synchronous motor and a control system including the motor and an inverter.
- Permanent magnet motor is usually driven by a motor controller combined with an inverter and controller.
- This motor control device includes an inverter circuit for driving and controlling the motor such as PWM control, and controls the drive current by ON / OFF operation (PWM control or the like) of the semiconductor switch element of the inverter circuit.
- ⁇ Permanent magnets have the wonderful feature that the characteristics of the magnets do not change forever, as is the case with permanent magnet motors, but the induced voltage that increases in proportion to the rotational speed is a limitation in the system configuration.
- field weakening control by an inverter is implemented, but this field weakening control causes a large amount of reactive current that does not contribute to motor torque to flow, resulting in reduced efficiency, heat generation, increased inverter current capacity, etc. There are many problems.
- the present invention provides a permanent magnet motor control device in which an induced voltage that increases in proportion to the number of revolutions becomes a problem.
- the armature winding is provided in a multiphase structure, and the operation mode of the multiphase inverter is changed according to the required operation state. Accordingly, it is an object of the present invention to provide a synchronous motor and a motor control device that are characterized by high efficiency operation in a wide operation region.
- the present invention provides a motor having a plurality of salient poles having armature windings and a plurality of field poles, each salient pole having a first armature winding or The second armature winding is wound, the number of salient poles of the winding group of the first armature winding, and the number of salient poles of the winding group of the second armature winding.
- the combination ratio is 2: 1.
- the motor of the present invention is characterized in that a linear motor is configured by combining the field magnetic pole and the salient pole magnetic pole.
- the present invention provides a motor including P field magnetic poles arranged at equal intervals and M salient magnetic poles having armature windings.
- the basic unit of the salient pole M is composed of nine salient poles in the order of 1 m, 2 m, 3 m, 4 m, 5 m, 6 m, 7 m, 8 m, and 9 m, and the salient poles are 1 m and 2 m,
- Six armature phases are formed by combinations of 3 m, 4 m and 5 m, 6 m, 7 m, 8 m, and 9 m, and the basic unit of the salient pole magnetic pole M is repeatedly added.
- the basic unit of the salient pole magnetic pole M is configured as a three-phase connection by a combination of 1 m and 2 m, 4 m and 5 m, 7 m and 8 m, and another three-phase connection by 3 m, 6 m, and 9 m.
- the basic unit of the salient pole magnetic pole M is repeatedly added.
- the basic unit of the salient pole magnetic pole M is configured as six armature phases with combinations of 1 m, 2 m, 3 m, 4 m, 5 m, 6 m, 7 m, 8 m, and 9 m.
- the basic unit of the magnetic pole M is configured as a six-phase motor that is repeatedly added.
- the motor of the present invention is characterized in that the field magnetic pole and the salient pole magnetic pole are combined to form a linear motor.
- the present invention provides a motor control apparatus for driving a motor having a salient pole magnetic pole having a plurality of armature windings and a plurality of field magnetic poles by a multiple inverter. The operation mode is switched.
- the salient poles of the motor have a three-phase connection inverter with a combination of 1 m and 2 m, 4 m and 5 m, 7 m and 8 m, and another three-phase connection with 3 m, 6 m, and 9 m.
- the inverter is composed of multiple inverters, and the operation mode of the inverter is switched according to the required operation state.
- the motor control device of the present invention is characterized in that it constitutes a servo control system that combines a motor, a position detecting device for field magnetic poles, a multiple inverter, and a controller.
- the motor control device of the present invention is characterized in that the field magnetic pole includes a permanent magnet.
- the motor of the present invention it is possible to provide a permanent magnet field type motor that realizes a reduction in cogging torque by using the disclosed slot combination of the number of salient poles and the number of field poles.
- the motor control device of the present invention is provided with multiple three-phase armature windings in one rotor, and individually connected to the respective inverter circuits corresponding to the three-phase armature windings.
- 1 shows a basic configuration of a motor according to an embodiment of the present invention.
- 1 shows an armature winding connection diagram of a motor according to an embodiment of the present invention.
- 1 shows a basic concept of a motor according to an embodiment of the present invention.
- An example of the armature winding connection of the motor by this invention is shown.
- An example of the armature winding connection of the motor by this invention is shown.
- An example of the armature winding connection of the motor by this invention is shown.
- the Example which combined several basic units of this invention is shown.
- An example of an armature winding connection in which a plurality of basic units of the present invention are combined is shown.
- An example of the armature winding connection of the motor by this invention is shown.
- 6 shows another embodiment (external rotation type) of a motor according to the present invention. 6 shows another embodiment (linear motor) of a motor according to the present invention. 6 shows another embodiment (linear motor) of a motor according to the present invention.
- 1 shows an embodiment of a control circuit system of the present invention. Another embodiment of the control circuit system of the present invention is shown. An example of the motor drive pattern of this invention is shown. Another embodiment of the control circuit system of the present invention is shown. An example of the rotor cross-section of the motor of this invention is shown. An example of the freedom degree of the rotor shape of the motor of this invention is shown.
- the motor of this embodiment includes P field magnetic poles 21 arranged at equal intervals, and an armature provided with M salient poles 13 having armature windings 11, and the movement of the field magnetic poles
- P field magnetic poles
- M armature windings
- the basic unit of the salient pole magnetic pole M is composed of nine salient poles 13 in the order of 1 m, 2 m, 3 m, 4 m, 5 m, 6 m, 7 m, 8 m, and 9 m, and the salient poles are 1 m and 2 m. , 3 m, 4 m and 5 m, 6 m, 7 m and 8 m, 9 m are combined to form six armature phases, and the motor has a basic unit of the salient pole M.
- an arbitrary salient pole magnetic pole can be set as the salient pole magnetic pole 1m.
- the field magnetic pole 21 made of a permanent magnet is composed of eight pieces, but may be ten pieces based on the relationship of the expression (1).
- the field magnetic pole 21 made of a permanent magnet is integrated with the shaft 12 and is configured to move in synchronization with a rotating magnetic field generated by a current flowing through the armature winding 11 of the salient pole magnetic pole 13.
- the number of magnetic poles of the salient poles 13 needs to be a multiple of 3, and in the case of a six-phase motor, the number of magnetic poles of the salient poles 13 is a multiple of 6. is required.
- This example shows that it can be driven as a six-phase motor with nine salient poles.
- the cogging torque pulsation number increases due to the slot combination by the combination of the salient pole magnetic pole 13 and the field magnetic pole 21 as shown in the equation (1).
- the cogging torque pulsation number is 72, and a slot combination of field poles consisting of 9 salient poles and 10 permanent magnets.
- the cogging torque pulsation number is 90.
- the greater the cogging torque pulsation number the greater the effect of reducing the cogging torque.
- FIG. 7 shows an embodiment in which a plurality of basic units of the present invention are combined.
- the number of salient poles 13 when the number of salient poles 13 is 18, the number of field poles 21 made of permanent magnets is 16. However, as shown in the equation (1), 20 may be used. Similarly, when the number of salient poles 13 is 27, the number of field poles 21 made of permanent magnets may be 24 or 30.
- the basic unit of the salient pole magnetic pole M is composed of nine salient poles 13 in the order of 1 m, 2 m, 3 m, 4 m, 5 m, 6 m, 7 m, 8 m, and 9 m.
- FIG. 7 shows a case where there are 18 salient poles and 16 field poles, but the basic unit of salient poles M according to the present invention is arranged twice.
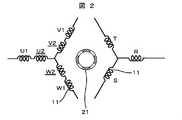
- FIG. 2 shows an armature winding connection diagram of a motor according to an embodiment of the present invention.
- the number of rotors provided with the permanent magnet 21 is one, but the salient poles are 1m and 2m U phase, 4m and 5m V phase, 7m and 8m W phase, and 6m R motor, 9m is S phase, and 3m is a motor characterized in that six armature phases are formed by combination of T phase. It is a basic unit configuration that combines one set UVW three-phase connection with U phase, V phase, and W phase and two sets of three-phase connection consisting of another one RST three-phase connection with R phase, S phase, and T phase. .
- FIG. 3 shows a basic concept of a motor according to an embodiment of the present invention.
- FIG. 3 shows that the motor of this embodiment can be driven as a 6-slot 8-pole motor and can be driven as a 3-slot 8-pole motor.
- the 9-slot is formed by combining the 3-phase connection consisting of 6 slots and the 3-phase connection consisting of the other 3 slots into a 2Y connection.
- the outline which becomes an 8-pole motor is shown.
- the armature winding of the U-phase salient pole magnetic pole of U1 and the armature winding of the salient pole magnetic pole of U2 are shown in a configuration example in series connection. In the V phase and the W phase, the same-phase armature windings are connected in series as in the U phase.
- FIG. 4 shows another armature winding connection diagram of the motor according to the present invention.
- the in-phase armature windings of the UVW phase are configured in parallel connection.
- the induced voltage of each phase is about half when connected in parallel. It is possible to select a configuration according to these conditions from a system configuration including a circuit.
- the number of salient pole armature windings of each of the nine salient pole magnetic base units is the same, and the in-phase armature windings of the UVW phase are connected in parallel, thereby inducing the RST phase. The value can be close to the voltage.
- FIG. 5 shows another armature winding connection diagram of the motor according to the present invention.
- the UVW phase and the RST phase are an example of ⁇ connection, and are a combination of in-phase armature windings of the UVW phase connected in series.
- FIG. 6 shows another armature winding connection diagram of the motor according to the present invention.
- the UVW phase is an example in which the ⁇ connection is made and the RST phase is made in the Y connection, and is a combination in which the armature windings in the same phase of the UVW phase are connected in series. As shown in FIG. The child windings may be connected in parallel. Further, the UVW phase can be combined with Y connection and the RST phase with ⁇ connection.
- FIG. 8 shows another armature winding connection diagram of the motor according to the present invention.
- the field magnetic pole 21 is a schematic showing an image of a permanent magnet, and the actual number of field magnetic poles is adjusted to the number as shown in equation (1). The same applies to other drawings.
- FIG. 10 shows another embodiment of the motor according to the present invention.
- the rotor 20 is an abduction type, and the combination of the armature windings 11 is in principle the same as the salient pole magnetic basic unit shown in FIG.
- a salient pole magnetic pole 13 having an armature winding 11 wound around the outer periphery of the armature is provided.
- a permanent magnet 21 magnetized in N and S at equal intervals and a rotor 20 including a yoke through which a magnetic flux passes as a magnetic path of a magnetic circuit are rotatably supported through a gap. .
- FIG. 11 shows another embodiment of the motor according to the present invention.
- the linear motor structure is supported by a support mechanism (not shown) so as to maintain a constant air gap with the armature 10 as the primary side and the portion made of the permanent magnet as the secondary side, and is relatively movable. Indicates. Further, auxiliary magnetic poles 14 are provided at both short portions of the armature for the purpose of reducing the thrust unevenness.
- 11A and 11B show examples of combinations of the armature windings 11 wound around the salient pole magnetic poles 13.
- the left and right balance of the magnetic circuit of the RST phase salient pole magnetic poles 13 can be taken, and more stable running is possible.
- the relative distance between the salient pole magnetic pole 13 and the field magnetic pole 21 shown in the formula (1) may be maintained, and the number of permanent magnets may be increased in accordance with the travel stroke.
- FIG. 12 shows another embodiment of the motor according to the present invention.
- FIG. 13 shows a basic configuration of the control circuit system of the present invention.
- a first inverter 1 and a second inverter 2 are connected to the power circuit 3, and each inverter is connected to a respective armature winding.
- the encoder 7 detects the position of the permanent magnet (magnetic pole detection) and the rotation information of the rotor, and supplies the drive controller 5 and the gate circuit controller 6 with the magnetic pole information and the rotation information of the motor.
- the power circuit in the first inverter 1 and the second inverter 2 is controlled to be turned on / off by the gate circuit controller 6 so that current flows from the power supply circuit 3 to the armature winding.
- a current sensor 9 is provided between the inverter and the armature winding, and the actual load current value is fed back to the gate circuit controller 6 to control the difference from the command current.
- the drive circuit system described here is only an example, and if current sensorless control, magnetic pole position detection sensorless control, or the like is applied, the current sensor 9, the encoder 7 and the like may be omitted depending on the application. Is possible.
- FIG. 14 shows an example of the basic configuration of the control circuit system of the present invention.
- a smoothing capacitor 4 is connected to the power supply circuit 3, a first inverter 1 and a second inverter 2 are connected, and each inverter is connected to an armature winding.
- a control circuit system configuration using a current source inverter may be used.
- the output voltage of the bridge inverter is a basic inverter system that outputs two levels of ⁇ E, assuming that the DC voltage is E, but a multi-level inverter system may be used.
- the multi-level inverter system is a mechanism in which a multi-level value can be obtained by dividing a DC voltage into a plurality and selecting one of the output voltages of the inverter, as in the motor of the present invention. In the case of multiple connection, it is effective when switching the operation mode of the multiple inverter according to the required operation state.
- the encoder 7 detects the position of the permanent magnet (magnetic pole detection) and the rotation information of the rotor, and supplies the drive controller 5 and the gate circuit controller 6 with the magnetic pole information and the rotation information of the motor.
- a linear encoder may be used as a means for detecting the position information and speed information of the mover.
- the gate circuit controller 6 controls the power elements in the first inverter 1 and the second inverter 2 to turn on and off so that current flows from the power supply circuit 3 to the armature winding. Yes.
- the drive controller 5 also controls the entire control circuit system while receiving and transmitting external information other than the motor of the present invention.
- a current sensor 9 is provided between the inverter and the armature winding, and the actual load current value is speeded back to the gate circuit controller 6 to control the difference from the command current.
- the drive circuit system described here is an example, and it is also possible to control by converting the current amount of the other armature winding by the information amount of only one of the current sensors.
- each inverter circuit corresponding to the multi-phase armature winding is individually connected to the rotor, and these multiple windings are based on the required operation state of the motor.
- each inverter circuit individually controls the drive current that is passed through the phase armature winding.
- the switching of the operation mode of the multiple inverter according to the requested operation state is performed based on the motor torque, the motor rotation speed, the motor control area, and the like.
- FIG. 15 shows an example of a drive pattern by the motor of the present invention.
- the induced voltage of the UVW phase is RST.
- the operation mode is set so that the RST phase with a small number of turns per phase is driven mainly.
- the UVW phase may be driven as the main.
- both the UVW-phase inverter 1 and the RST-phase inverter 2 may be driven while maintaining the optimum phase difference between them.
- an armature winding (not shown) is provided between the armature windings connected to the UVW-phase inverter 1 and the RST-phase inverter 2, and the armature winding in the sleep mode is opened and closed. It is also possible to turn on and off by machine.
- FIG. 16 shows another embodiment of the drive circuit system of the present invention.
- FIG. 16 shows a combination of two or more sets of multiple inverters in the basic control circuit system of the present invention.
- Each inverter UVW-Y1, UVW-Y2, RST-Y1, RST-Y2 and the like is in accordance with instructions from the drive controller 5. It is a system configuration that performs overall control. In the case of a large-capacity motor with a large number of salient poles, this system can be operated by combining a plurality of small inverters in parallel without using a large-capacity inverter.
- FIG. 17 shows an example of the rotor cross-sectional structure of the present invention.
- FIG. 18 shows various configuration examples of the rotor shape of the present invention.
- FIG. 18 shows a mechanism in which the rotor connected to the shaft 12 rotates, and shows (a) inner rotation type, (b) outer rotation type, (c) axial gap type, and (d) hollow type.
- a double-sided axial gap type in which the armature 10 is sandwiched from both sides by two sets of rotors is also possible.
- other systems may be configured by combining a plurality of armatures.
- the permanent magnet has the effect of reducing the cogging torque by using a slot combination of nine salient poles and eight (or ten) field poles.
- a field type motor can be provided.
- the present invention provides multiple three-phase armature windings with six salient poles and three salient poles in one rotor, and each inverter corresponding to these three-phase armature windings. It is possible to provide a system in which a circuit is connected and each inverter circuit individually controls a drive current to be supplied to these three-phase armature windings based on a required operation state of the motor. As a result, it is possible to use only the armature winding with a small number of turns that is highly efficient when the motor speed is high speed rotation in the field weakening area where the motor speed is high speed. The effect which can improve the driving efficiency of a motor is acquired.
- the motor and motor control device of the present invention can be applied to conventional permanent magnet field synchronous motors and motor control devices that drive them in general.
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Permanent Magnet Type Synchronous Machine (AREA)
- Control Of Ac Motors In General (AREA)
- Windings For Motors And Generators (AREA)
- Linear Motors (AREA)
Abstract
La présente invention concerne un moteur synchrone du type à champ d’aimant permanent et un système de commande équipé du moteur et d’un convertisseur. L’invention concerne donc un moteur synchrone et un dispositif de commande de moteur qui peut exécuter un fonctionnement hautement efficace. Le moteur comporte : une pluralité de pôles saillants comprenant un enroulement d’armature ; et une pluralité de pièces polaires. Chacun des pôles saillants comprend un premier enroulement d’armature et un second enroulement d’armature disposés autour du pôle. Le rapport du nombre de pôles saillants des premiers enroulements d’armature sur le nombre de pôles saillants des seconds enroulements d’armature est établi à 2:1. La combinaison des fentes du nombre de pôles saillants et du nombre de pièces polaires permet d’obtenir une réduction de couple de crantage.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008287267A JP2010115068A (ja) | 2008-11-10 | 2008-11-10 | モータ、およびモータ制御装置 |
| JP2008-287267 | 2008-11-10 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2010052930A1 true WO2010052930A1 (fr) | 2010-05-14 |
Family
ID=42152743
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2009/005944 WO2010052930A1 (fr) | 2008-11-10 | 2009-11-09 | Moteur et dispositif de commande de moteur |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP2010115068A (fr) |
| WO (1) | WO2010052930A1 (fr) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103166337A (zh) * | 2013-01-30 | 2013-06-19 | 东南大学 | 一种双速绕组开关磁阻电机 |
| CN108400742A (zh) * | 2018-05-14 | 2018-08-14 | 西安清泰科新能源技术有限责任公司 | 一种双绕组三相电机及其控制方法 |
| EP2991206B1 (fr) * | 2013-04-25 | 2020-04-29 | Changzhou Leili Motor Science & Technology Co., Ltd. | Moteur sans balai pour pompe de drainage et pompe de drainage |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20130241366A1 (en) * | 2012-02-27 | 2013-09-19 | Daniel Kee Young Kim | High torque/high efficiency winding motor |
| GB201216099D0 (en) * | 2012-09-10 | 2012-10-24 | Protean Electric Ltd | Capacitor |
| WO2016206726A1 (fr) * | 2015-06-23 | 2016-12-29 | Thrane & Thrane A/S | Véhicule/navire/aéronef comportant une antenne rotative |
| CN105897064B (zh) * | 2016-05-30 | 2019-02-05 | 南京航空航天大学 | 一种集成绕组自悬浮永磁电机和控制系统及控制方法 |
| CN106899159B (zh) * | 2017-05-10 | 2019-04-09 | 山东理工大学 | 一种双△绕组交流发电机 |
| JP7044844B2 (ja) * | 2020-09-18 | 2022-03-30 | 株式会社神戸製鋼所 | 電動機 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007049862A (ja) * | 2005-08-12 | 2007-02-22 | Hitachi Ltd | 磁極位置センサ内蔵電気機械及び電気機械装置並びに車載電機システム |
| JP2007151366A (ja) * | 2005-11-30 | 2007-06-14 | Hitachi Ltd | モータ駆動装置及びそれを用いた自動車 |
| JP2007221995A (ja) * | 2006-02-18 | 2007-08-30 | Nishu Lee | 電動発電装置 |
| JP2008092739A (ja) * | 2006-10-04 | 2008-04-17 | Nissan Motor Co Ltd | 電力変換装置及びその制御方法 |
-
2008
- 2008-11-10 JP JP2008287267A patent/JP2010115068A/ja active Pending
-
2009
- 2009-11-09 WO PCT/JP2009/005944 patent/WO2010052930A1/fr active Application Filing
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007049862A (ja) * | 2005-08-12 | 2007-02-22 | Hitachi Ltd | 磁極位置センサ内蔵電気機械及び電気機械装置並びに車載電機システム |
| JP2007151366A (ja) * | 2005-11-30 | 2007-06-14 | Hitachi Ltd | モータ駆動装置及びそれを用いた自動車 |
| JP2007221995A (ja) * | 2006-02-18 | 2007-08-30 | Nishu Lee | 電動発電装置 |
| JP2008092739A (ja) * | 2006-10-04 | 2008-04-17 | Nissan Motor Co Ltd | 電力変換装置及びその制御方法 |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103166337A (zh) * | 2013-01-30 | 2013-06-19 | 东南大学 | 一种双速绕组开关磁阻电机 |
| EP2991206B1 (fr) * | 2013-04-25 | 2020-04-29 | Changzhou Leili Motor Science & Technology Co., Ltd. | Moteur sans balai pour pompe de drainage et pompe de drainage |
| CN108400742A (zh) * | 2018-05-14 | 2018-08-14 | 西安清泰科新能源技术有限责任公司 | 一种双绕组三相电机及其控制方法 |
| CN108400742B (zh) * | 2018-05-14 | 2024-05-03 | 西安清泰科新能源技术有限责任公司 | 一种双绕组三相电机及其控制方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2010115068A (ja) | 2010-05-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2010052930A1 (fr) | Moteur et dispositif de commande de moteur | |
| US11223311B2 (en) | Rotary electric machine and rotary electric machine system | |
| CN102113204A (zh) | 同步电动机驱动系统 | |
| JP2001157487A (ja) | 回転電機の制御装置 | |
| US20090322176A1 (en) | Synchronous motor with rotor having suitably-arranged field coil, permanent magnets, and salient-pole structure | |
| CN110383639B (zh) | 旋转电机系统 | |
| JP2003009486A (ja) | 可変速電動機 | |
| JP6388611B2 (ja) | ハイブリッド界磁式ダブルギャップ同期機 | |
| JP4984420B2 (ja) | リラクタンスモータの駆動装置及び方法 | |
| US20110241599A1 (en) | System including a plurality of motors and a drive circuit therefor | |
| JP2005304119A (ja) | 電動機駆動システム | |
| US6642683B1 (en) | Controller and associated drive assembly for power sharing, time sliced control of a brushless direct current motor | |
| WO2011043118A1 (fr) | Système de moteur | |
| US6661190B1 (en) | Controller and associated drive assembly controlling a brushless direct current motor | |
| JP2008160920A (ja) | 結線パターン切換装置 | |
| JP5885423B2 (ja) | 永久磁石式回転電機 | |
| JP2017225203A (ja) | スイッチドリラクタンスモータ駆動システム | |
| JP2016077052A (ja) | 磁石レス回転電機及び回転電機制御システム | |
| JP2010028957A (ja) | 誘導機及び誘導機極数切換システム | |
| CN109643969B (zh) | 桥式变流器和多相电机 | |
| KR101368211B1 (ko) | 전기자동차용 bldc 모터와 제어장치, 및 그 제어방법 | |
| JP2017011806A (ja) | モータ制御装置 | |
| JP2004509599A (ja) | 電気機械 | |
| JP2009142130A (ja) | 回転電機及び回転電機駆動装置 | |
| JP5696438B2 (ja) | 永久磁石型電動機 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 09824630 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 09824630 Country of ref document: EP Kind code of ref document: A1 |