USRE45112E1 - Power tool anti-kickback system with rotational rate sensor - Google Patents
Power tool anti-kickback system with rotational rate sensor Download PDFInfo
- Publication number
- USRE45112E1 USRE45112E1 US13/600,927 US201213600927A USRE45112E US RE45112 E1 USRE45112 E1 US RE45112E1 US 201213600927 A US201213600927 A US 201213600927A US RE45112 E USRE45112 E US RE45112E
- Authority
- US
- United States
- Prior art keywords
- power tool
- angular displacement
- rotary shaft
- rotational motion
- angular
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime, expires
Links
Images










Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25F—COMBINATION OR MULTI-PURPOSE TOOLS NOT OTHERWISE PROVIDED FOR; DETAILS OR COMPONENTS OF PORTABLE POWER-DRIVEN TOOLS NOT PARTICULARLY RELATED TO THE OPERATIONS PERFORMED AND NOT OTHERWISE PROVIDED FOR
- B25F5/00—Details or components of portable power-driven tools not particularly related to the operations performed and not otherwise provided for
- B25F5/001—Gearings, speed selectors, clutches or the like specially adapted for rotary tools
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23D—PLANING; SLOTTING; SHEARING; BROACHING; SAWING; FILING; SCRAPING; LIKE OPERATIONS FOR WORKING METAL BY REMOVING MATERIAL, NOT OTHERWISE PROVIDED FOR
- B23D59/00—Accessories specially designed for sawing machines or sawing devices
- B23D59/001—Measuring or control devices, e.g. for automatic control of work feed pressure on band saw blade
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25B—TOOLS OR BENCH DEVICES NOT OTHERWISE PROVIDED FOR, FOR FASTENING, CONNECTING, DISENGAGING, OR HOLDING
- B25B21/00—Portable power-driven screw or nut setting or loosening tools; Attachments for drilling apparatus serving the same purpose
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25F—COMBINATION OR MULTI-PURPOSE TOOLS NOT OTHERWISE PROVIDED FOR; DETAILS OR COMPONENTS OF PORTABLE POWER-DRIVEN TOOLS NOT PARTICULARLY RELATED TO THE OPERATIONS PERFORMED AND NOT OTHERWISE PROVIDED FOR
- B25F5/00—Details or components of portable power-driven tools not particularly related to the operations performed and not otherwise provided for
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P29/00—Arrangements for regulating or controlling electric motors, appropriate for both AC and DC motors
- H02P29/02—Providing protection against overload without automatic interruption of supply
- H02P29/032—Preventing damage to the motor, e.g. setting individual current limits for different drive conditions
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02H—EMERGENCY PROTECTIVE CIRCUIT ARRANGEMENTS
- H02H7/00—Emergency protective circuit arrangements specially adapted for specific types of electric machines or apparatus or for sectionalised protection of cable or line systems, and effecting automatic switching in the event of an undesired change from normal working conditions
- H02H7/08—Emergency protective circuit arrangements specially adapted for specific types of electric machines or apparatus or for sectionalised protection of cable or line systems, and effecting automatic switching in the event of an undesired change from normal working conditions for dynamo-electric motors
- H02H7/085—Emergency protective circuit arrangements specially adapted for specific types of electric machines or apparatus or for sectionalised protection of cable or line systems, and effecting automatic switching in the event of an undesired change from normal working conditions for dynamo-electric motors against excessive load
- H02H7/0854—Emergency protective circuit arrangements specially adapted for specific types of electric machines or apparatus or for sectionalised protection of cable or line systems, and effecting automatic switching in the event of an undesired change from normal working conditions for dynamo-electric motors against excessive load responsive to rate of change of current, couple or speed, e.g. anti-kickback protection
Definitions
- the disclosure relates generally to power tools and, more particularly, to a control system having a rotational rate sensor for detecting the onset of a rotational condition in a power tool.
- Power tools typically employ a motor that imparts torque to a tool through a spindle.
- the motor spindle is coupled through a series of reducing gears to the chuck, which in turn holds the drill bit or other cutting/abrading tool, such as a hole saw, a grinding wheel or the like.
- Power screwdrivers as well a large rotary hammers work on a similar principle.
- the function of the reducing gears or gear train is to reduce the rotational speed of the tool while increasing the rotational torque.
- Power routers are somewhat different.
- the cutting tool of the hand-held router is typically direct coupled to the spindle of the motor.
- the full rotational speed of the motor is used without gear reduction to rotate the router bit at high speed.
- Reciprocating saw and jigsaws use yet another type of gear train that translates the rotational motion of the motor spindle to reciprocating movement.
- burrs may stop drill bit rotation, thereby causing a strong reaction torque that is imparted to the tool operator as the motor turns the tool in the operator's grasp (rather than turning the drill bit).
- a control system for use in a power tool.
- the control system includes: a rotational rate sensor having a resonating mass and a controller electrically connected to the rotational rate sensor.
- the rotational rate sensor detects lateral displacement of the resonating mass and generates a signal indicative of the detected lateral displacement, such that lateral displacement is directly proportional to a rotational speed at which the power tool rotates about an axis of the rotary shaft. Based on the generated signal, the controller initiates a protective operation to avoid undesirable rotation of the power tool.
- control scheme employed by the power tool may initiate different protective operations for different tool conditions.
- control scheme may initiate a protective operations based on input from two different sensors.
- control scheme employed by the power tool may initiate protective operations based on the rotational energy experienced by the tool.
- FIG. 1 is a longitudinal sectional view of an exemplary rotary hammer configured in accordance with the present disclosure
- FIG. 2 is simplified block diagram of an exemplary control system in accordance with present disclosure
- FIG. 3 is a flowchart illustrating an exemplary method for determining the onset of a kickback condition according to the present disclosure
- FIGS. 4A and 4B are flowcharts illustrating an exemplary method for determining a kickback condition based on angular displacement according to the present disclosure
- FIG. 5 is a flowchart illustrating an exemplary method for determining a kickback condition based input from two different sensors according to the present disclosure
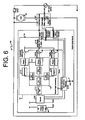
- FIG. 6 is a block diagram of another exemplary control system in accordance with the present disclosure.
- FIG. 7 depicts an exemplary look-up table which may be used by the control system
- FIG. 8 illustrates an exemplary calibration system for a power tool configured with the control system
- FIG. 9 illustrates an exemplary calibration procedure which may be employed by the control system.
- FIG. 1 illustrates an exemplary power tool 10 having a rotary shaft.
- the power tool is a hand held rotary hammer. While the following description is provided with reference to a rotary hammer, it is readily understood that the broader aspects of this disclosure are applicable to other types of power tools having rotary shafts, such as drills, circular saws, angle grinders, screw drivers and polishers.
- the rotary hammer includes a spindle 12 (i.e., a rotary shaft) drivably coupled to an electric motor 14 .
- a chuck 16 is coupled at one end of the spindle 12 ; whereas a drive shaft 18 of the electric motor 14 is connected via a transmission 22 to the other end of the spindle 12 .
- These components are enclosed within a housing 18 .
- Operation of the tool is controlled through the use an operator actuated switch 24 embedded in the handle of the tool.
- the switch regulates current flow from a power supply 26 to the motor 14 .
- the power tool may further include a temperature sensor 27 .
- the power tool 10 is further configured with a control system 30 for detecting and preventing torque conditions which may cause the operator to lose control of the tool.
- the control system 30 may include a rotational rate sensor 32 , a current sensor 34 , and a microcontroller 36 embedded in the handle of the power tool 10 .
- the power tool 10 may rotate in the operator's grasp.
- the rotational rate sensor 32 is configured to detect rotational motion of the tool about the longitudinal axis of the spindle 12 .
- the rotational rate sensor 32 in turn communicates a signal indicative of any rotational motion to the controller 36 for further assessment.
- the sensor may be disposed in a different location and/or configured to detect motion along a different axis.
- the operating principle of the rotational rate sensor 32 is based on the Coriolis effect.
- the rotational rate sensor is comprised of a resonating mass.
- the resonating mass When the power tool is subject to rotational motion about the axis of the spindle, the resonating mass will be laterally displaced in accordance with the Coriolis effect, such that the lateral displacement is directly proportional to the angular rate. It is noteworthy that the resonating motion of the mass and the lateral movement of the mass occur in a plane which is orientated perpendicular to the rotational axis of the rotary shaft. Capacitive sensing elements are then used to detect the lateral displacement and generate an applicable signal indicative of the lateral displacement.
- An exemplary rotational rate sensor is the ADXRS150 or ADXRS300 gyroscope device commercially available from Analog Devices.
- Other types of rotational sensors such as angular speed sensors, accelerometers, etc., are also within the scope of this disclosure.
- the microcontroller 36 assesses the rotational motion of the tool to detect rotational conditions which may cause the operator to lose control of the tool. Upon detecting an unacceptable rotational condition, the microcontroller 36 will initiate a protective operation intended to minimize and/or avoid any undesired rotation of the power tool. For instance, when the angular velocity of the tool exceeds some empirically derived threshold, the microcontroller may cut power to the motor.
- a few exemplary techniques for assessing the rotational condition of the tool are further described below. It is readily understood that other techniques for assessing the rotational condition of the tool are also within the scope of this disclosure.
- a power supply circuit 29 is coupled to an AC power line input and supplies DC voltage to operate the microcontroller 36 ′.
- the trigger switch 24 ′ supplies a trigger signal to the microcontroller 36 ′ which indicates the position or setting of the trigger switch 24 ′ as it is manually operated by the power tool operator.
- Drive current for operating the motor 14 ′ is controlled by a triac drive circuit 42 .
- the triac drive circuit 42 is, in turn, controlled by a signal supplied by microcontroller 36 ′.
- the control system 30 ′ may include a reset circuit 44 which, when activated, causes the microcontroller 36 ′ to be re-initialized.
- the microcontroller 36 ′ is also supplied with a signal from a current detector circuit 48 .
- the current detector circuit 48 is coupled to the triac drive circuit 42 and supplies a signal indicative of the conductive state of the triac drive circuit 42 . If for some reason the triac drive circuit 42 does not turn on in response to the control signal from the microcontroller 36 ′, this condition is detected by the current detector circuit 48 .
- a current sensor 34 ′ is connected in series with the triac drive circuit 42 and the motor 14 ′.
- the current sensor 34 ′ may be a low resistance, high wattage resistor.
- the voltage drop across the current sensor 34 ′ is measured as an indication of actual instantaneous motor current.
- the instantaneous motor current is supplied to an average current measuring circuit 46 which in turn supplies the average current value to the microcontroller 36 ′.
- the microcontroller 36 ′ may use the average current to evaluate the rotational condition of the tool.
- the trigger switch 24 ′ supplies a trigger signal that varies in proportion to the switch setting to the microcontroller 36 ′. Based on this trigger signal, the microcontroller 36 ′ generates a control signal which causes the triac drive circuit 42 to conduct, thereby allowing the motor 14 ′ to draw current. Motor torque is substantially proportional to the current drawn by the motor and the current draw is controlled by the control signal sent from the microcontroller to the triac drive circuit 42 . Thus, the microcontroller 36 ′ can control the torque imparted by the motor.
- Pulse mode is an exemplary protective operation which may be initiated upon detecting a kickback condition.
- the microcontroller 36 ′ may operate the motor 14 ′ in a pulse mode.
- the motor current is pulsed at a predetermined frequency with a predetermined on-time.
- the series of current pulses is designed such that the operator may regain control of a twisting tool.
- the time between pulses may be set between 0.1 and 1 second.
- the series of current pulses create torque pulses that may have a peak torque that is greater than the average torque delivered by the spindle 12 .
- the torque pulses may allow the tool 10 to break through the burrs or workpiece restrictions that are causing the impending kickback condition. Further details regarding this protection operation may be found in U.S. Pat. No. 6,479,958 which is incorporated herein by reference.
- Another exemplary protective operation is to reduce the torque imparted to the spindle to a non-zero value that enables an operator of the tool to regain control of the tool.
- the controller can override the trigger signal from the trigger switch or other operator input commands.
- the controller 36 ′ Upon detecting a triggering rotational condition, the controller 36 ′ sends a control signal to the triac drive circuit 46 ′ which reduces the voltage which in turn reduces the current draw of the motor, thereby reducing the torque imparted to the spindle.
- the torque could be reduced to 30% of its current operational amount or a predefined fixed torque level.
- the tool would operate at his reduced level until the operator released the trigger switch and re-engaged it or cycled tool power.
- Another method would involve resetting torque to its original operation level if the operator regains control of the tool. In this way, the operator has regained control of the tool without terminating or resetting operation of the tool.
- DC operated motors are often controlled by pulse width modulation, where the duty cycle of the modulation is proportional the speed of the motor and thus the torque imparted by the motor to the spindle.
- the microcontroller may be configured to control the duty cycle of the motor control signal.
- the power tool may be configured with a torque transmitting device interposed between the motor and the spindle.
- the controller may interface with the torque transmitting device to reduce torque.
- the torque transmitting device may take the form of a magneto-rheologocical fluid clutch which can vary the torque output proportional to the current fed through a magnetic field generating coil. It could also take the form of a friction plate, cone clutch or wrap spring clutch which can have variable levels of slippage based on a preload holding the friction materials together and thus transmitting torque. In this example, the preload could be changed by driving a lead screw supporting the ground end of the spring through a motor, solenoid or other type of electromechanical actuator. Other types of torque transmitting devices are also contemplated by this disclosure.
- the protective operation is intended to terminate or reset operation of the tool.
- Exemplary protective operations of this nature include (but are not limited to) disengaging the motor 14 ′ from the spindle 12 , braking the motor 14 ′, braking the spindle 12 , and disconnecting power to the motor 14 ′. Depending on the size and orientation of the tool 10 , one or more of these protective operations may be initiated to prevent undesirable rotation of the tool 10 .
- FIG. 3 An exemplary method for detecting a rotational condition of the tool is illustrated in FIG. 3 .
- the operator switch is checked at step 52 to determine if the tool is operating. If the switch is not closed, then power is not being supplied to the motor as indicated at 53 . In this case, there is no need to monitor for kickback conditions. Conversely, if the switch is closed, then power is being supplied to the motor as indicated at 54 .
- rotational motion of the tool is monitored at 56 based on the signal from the rotational rate sensor.
- the rotational rate of the tool exceeds some empirically derived threshold (as shown at 57 )
- this may indicate the onset of kickback condition; otherwise, processing control returns to the beginning of the algorithm.
- the rotational displacement, rotational acceleration, or some combination thereof as derived from the sensor signal may be used to determine the onset of a kickback condition.
- the microcontroller Prior to initiating some protective operation, the microcontroller also evaluates the current draw of the motor at 58 . Specifically, the rate of change of the motor current is measured. When the rate of change is positive and exceeds some predetermined threshold, then one or more protective operations are initiated at 60 . If either the rate of change is not positive or the rate of change does not exceeds the threshold, then processing control returns to the beginning of the algorithm. In this case, a sudden change in the current draw is optionally used to confirm the onset of the kickback condition. It is envisioned that inputs from other sensors, such as a temperature sensor, may be used in a similar manner. It is to be understood that only the relevant steps of the control scheme are discussed above, but that other software-implemented instructions may be needed to control and manage the overall operation of the tool.
- the control scheme employed by the power tool 10 may initiate different protective operations for different tool conditions.
- the amount of angular displacement experienced by the tool may dictate different protective operations.
- angular displacement is within a first range (e.g., less than 31°)
- the operator is presumed to have control of the tool and thus no protective operations are needed.
- the angular displacement exceeds this first range, it may be presumed that the tool has encountered a kickback condition and therefore some protective operation may be needed.
- this second range of angular displacement e.g., between 30° to 90°
- the control scheme may initiate a pulse mode in hope of breaking through the restrictions that are causing the impending kickback condition.
- the angular displacement exceeds the second range (e.g., greater than 90°)
- the control scheme such as disconnecting the power to the motor.
- three or more ranges of displacement may be defined for a given power tool.
- protective operations may be initiated based on the angular displacement or a combination of parameters, such as angular acceleration, angular velocity, motor current, rate of change of motor current, motor temperature, switch temperature, etc. It is readily understood that the number and size of the ranges may vary for different control schemes and/or different types of tools. It is also envisioned that different protective operations may be initiated based on ranges of other parameters (e.g., ranges of angular velocity). Likewise, one or more protective operations may be associated with different ranges (i.e., tool conditions).
- angular displacement is monitored in relation to a start point ( ⁇ 0 ).
- this starting point is initialized to zero. Any subsequent angular displacement of the tool is then measured in relation to this reference.
- the tool may employ a starting point reset function.
- the starting point is set. If the operator repositions the tool (e.g., rotate it at a very slow rate), then the starting point is reset. For example, if the tool is rotated at a rate less than 5 degree per second, then the starting position is reset. Angular displacement is then measured from the new starting point.
- Angular displacement of the tool is then monitored at step 62 .
- the angular displacement is measured in relation to the reference value ( ⁇ 0 ) and derived from the rate of angular displacement over time or angular velocity ( ⁇ TOOL ) as provided by a rotational rate sensor.
- ⁇ TOOL angular velocity
- the rotational rate sensor described above is presently preferred for determining angular displacement of the tool, it is readily understood that this additional aspect of the present invention is not limited to this type of sensor.
- angular displacement may be derived from a different type of rotational rate sensor, an acceleration sensor or some other manner for detecting rotational displacement of the tool.
- Angular displacement is assessed at steps 64 and 68 .
- a first protective operation is initiated at step 66 .
- power to the motor is disconnected, thereby terminating operation of the tool.
- a different protective operation such as pulsing the motor current, may be initiated at 70 .
- an instantaneous measure of angular velocity must also exceed some minimum threshold before a pulse mode is initiated as shown at step 69 . If neither of these criteria are met, no protective actions are taken and operating conditions of tool continue to be monitored by the control scheme.
- the control scheme continues to monitor tool operating conditions.
- Hazardous conditions may be monitored as shown at step 72 .
- motor current may be monitored. If the motor current spikes above some predefined threshold, then power to the motor is disconnected at 73 .
- angular displacement may also be monitored. If angular displacement exceeds a threshold indicative of lost control, then the power to the motor is also disconnected. It is readily understood that other types of hazardous conditions may be monitored.
- pulse mode is only maintained for a brief period of time.
- a timer is initiated at step 71 and pulse mode continues until the timer has expired as shown at 76 .
- the control scheme may also monitor if the restrictions that caused the kickback condition have been overcome as shown at step 74 . If the restrictions are overcome, then pulse mode is discontinued at step 75 . When the timer expires without overcoming the restrictions, then power to the motor is disconnected as shown at 77 .
- step 82 the operator switch is checked at step 82 to determine if the tool is operating. If the switch is not closed, then power is not being supplied to the motor as indicated at 83 . In this case, there is no need to monitor for kickback conditions. Conversely, if the switch is closed, then power is being supplied to the motor as indicated at 84 .
- rotational motion of the tool is monitored at 86 based on the signal from the rotational rate sensor.
- the rotational rate of the tool exceeds some empirically derived threshold (as shown at 87 )
- this may indicate the onset of kickback condition; otherwise, processing control returns to the beginning of the algorithm.
- the rotational displacement, rotational acceleration, or some combination thereof as derived from the sensor signal may be used to determine the onset of a kickback condition.
- the microcontroller Prior to initiating some protective operation, the microcontroller also evaluates the current draw of the motor at 88 . Specifically, the rate of change of the motor current is measured. When the rate of change is positive and exceeds some predetermined threshold, then one or more protective operations are initiated at 90 . If either the rate of change is not positive or the rate of change does not exceeds the threshold, then processing control returns to the beginning of the algorithm. In this case, a sudden change in the current draw is used to confirm the onset of the kickback condition. While the above description was provided with reference to a rotational rate sensor and a current sensor, it is readily understood that the broader aspects of the present invention encompass making such a determination may be based on input from other types of sensors.
- Determination of a rotational condition may also be based on other types of criteria.
- a rotational condition may be assessed based on the rotational energy experienced by the power tool.
- the rate of angular displacement could be measured by a rotational rate sensor; whereas, the moment of inertia of the tool (I TOOL ) could be preprogrammed into the controller based on the mass properties of the power tool (e.g., mass, rotation inertia and a center of gravity position) and a distance measure between the center of gravity position and the spindle axis.
- I TOOL moment of inertia of the tool
- Initiating a protective operation based on E ⁇ — TOOL is desirable because the energy condition is not tool specific and therefore could be applied to a variety of anti-kickback applications.
- Other criteria for determining a kickback condition are also within the broader aspects of the present invention.
- FIG. 6 depicts another exemplary control system 100 .
- the control system is comprised generally of a rotational rate sensor 32 ′′, sensor processing logic 110 , a motor controller 36 ′′, a motor 14 ′′ and a power supply 29 ′′.
- the rotational sensor 32 ′′ may be a single sensor, such as a gyroscope or accelerometer, or two or more sensors disposed within the tool.
- Sensor processing logic 110 may be implemented in software or hardware. Likewise, power-up and calibration functions may be performed with hardware, software or combination thereof.
- sensor output is processed as follows.
- the sensor output is rotational velocity.
- the sensor output passes through a low pass filter 111 before going into a null point and gain calibration routine 112 .
- the purpose of the calibration routine is to remove any offset and compensate for any gains of the rate sensor before determining rotational conditions.
- the rate signal is then integrated at 113 to get position and derived at 114 to get acceleration. All three of the signals are then input to a comparator 115 which checks whether or not the value has exceeded a defined threshold.
- a logic block 116 e.g., AND, OR, etc. is configured so that any or all of the thresholds must be met before indicating a trip signal which is sent to the motor controller 36 ′′.
- tests are shown as comparators on position, rate, or acceleration, it is noted that the tests are not limited to thresholds alone. Combinations of each variable can be used such as if the rate is less than W then position must be greater than X for a trip event to occur. In another example, if rate is greater than Y then position must be greater than Z for a trip to occur.
- control system may employ a look-up table as shown in FIG. 7 .
- rotational position is charted against rotational velocity.
- Look-up tables having other parameters and further dimensions are also contemplated. Additionally, the values in the table may indicate the type of protective operation or point to another table for more processing.
- FIG. 8 illustrates an exemplary calibration system 120 for a power tool 10 configured with the control system described above.
- the calibration system 120 is generally comprised of a test fixture 122 , a test module 124 , and a personal computer 126 .
- the test module is first removed from the power tool and affixed to the test fixture 122 .
- the rotational rate sensor along with the software routines which implement the control schemes described above are contained within the test module 124 .
- the test fixture 122 is generally operable to rotate the test module 124 in a manner that may be experienced when module resides in the power tool.
- the personal computer 126 is configured to control operation of the test fixture 122 in accordance with a calibration routine as well as to interface with the test module 124 during the calibration process. It is also envisioned that in other configurations the entire power tool may affixed to and rotated by the test fixture.
- a calibration routine is downloaded at 130 from the PC into the test module 124 .
- the calibration routine cooperatively operates with the software routines of the control system to determine calibration values for the control system.
- the calibration, procedure begins with the test module 124 measuring the output of the rotational rate sensor at 131 while the power tool remains stationary. This measured output serves as an offset or null calibration value (i.e., output value of the sensor when angular velocity is zero) for the rotational rate sensor.
- the personal computer commands the test fixture 132 to rotate the test module 124 (e.g., clockwise) at predefined angular velocity for a predefined period of time.
- the test fixture 122 may rotate the test module 124 at 50 degrees per second until 50 degrees of rotation is reached. During this movement, the test module is capturing the angular velocity as reported by the rotational rate sensor. The test module will compare the angular velocity 133 as reported by the rotational rate sensor with the known angular velocity at which the test module was rotated by the test fixture to determine a gain value. The gain value is temporarily stored by the test module for subsequent processing.
- the personal computer then commands the test fixture 134 to rotate the test module in an opposite direction (e.g., counter-clockwise) at a predefined angular velocity for a predefined period of time.
- the test module again captures the angular velocity as reported by the rotational rate sensor and compares these captured values 135 with the known angular velocity to determine another gain value.
- the second gain value is also stored by the test module. Thus, there is a gain value for each direction of tool rotation.
- the personal computer re-executes the calibration procedure at 136 .
- the test fixture is commanded to rotate the test module at the predefined angular velocity in one direction and then in the opposite direction.
- the test module again captures the angular velocity as reported by the rotational rate sensor.
- the test module adjusts the measured angular velocity using the applicable calibration values and compares the adjusted values to the known angular velocity at which the test module was rotated by the test fixture. If the adjusted values fall within some defined tolerance of the expected values, these calibration values are sent by the test module to the personal computer.
- These calibration values can then be downloaded into memory of a power tool.
- the control system of the power tool will use the calibration values to adjust the output reported by the rotational rate sensor. It is readily understood that this type of calibration procedure may be undertaken for each power tool or once for each family of power tools.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Power Engineering (AREA)
- Percussive Tools And Related Accessories (AREA)
- Numerical Control (AREA)
- Details Of Spanners, Wrenches, And Screw Drivers And Accessories (AREA)
- Control Of Electric Motors In General (AREA)
- Dental Tools And Instruments Or Auxiliary Dental Instruments (AREA)
Abstract
A control system is provided for use in a power tool. The control system includes: a rotational rate sensor having a resonating mass and a controller electrically connected to the rotational rate sensor. The rotational rate sensor detects lateral displacement of the resonating mass and generates a signal indicative of the detected lateral displacement, such that the lateral displacement is directly proportional to a rotational speed at which the power tool rotates about an axis of the rotary shaft. Based on the generated signal, the controller initiates a protective operation to avoid further undesirable rotation of the power tool. The controller may opt to reduce the torque applied to shaft to a non-zero value that enables the operator to regain control of the tool.
Description
This application is a continuation reissue of U.S. Ser. No. 13/423,736, filed Mar. 19, 2012 which is a reissue of U.S. Pat. No. 7,681,659 issued Mar. 23, 2010, which is a continuation of U.S. patent application Ser. No. 11/519,427 filed on Sep. 12, 2006, now U.S. Pat. No. 7,552,781 issued Jun. 30, 2009 which in turn is a continuation-in-part of U.S. patent application No. 11/254,146 filed on Oct. 19, 2005, now U.S. Pat. No. 7,410,006 issued Aug. 12, 2008 which claims benefit of U.S. Provisional Application No. 60/620,283, filed on Oct. 20, 2004 and U.S. Provisional Application No. 60/675,692 filed on Apr. 28, 2005, . The disclosure of the above applications is incorporated herein by reference. More than one reissue application has been filed for the reissue of U.S. Pat. No. 7,681,659. The reissue applications are application Ser. No. 13/600,927 (the present application), Ser. Nos. 13/600,722 and 13/423,736, all of which are continuation reissues of U.S. Pat. No. 7,681,659.
The disclosure relates generally to power tools and, more particularly, to a control system having a rotational rate sensor for detecting the onset of a rotational condition in a power tool.
Power tools typically employ a motor that imparts torque to a tool through a spindle. In the case of an electric drill, the motor spindle is coupled through a series of reducing gears to the chuck, which in turn holds the drill bit or other cutting/abrading tool, such as a hole saw, a grinding wheel or the like. Power screwdrivers as well a large rotary hammers work on a similar principle. In each of these cases, the function of the reducing gears or gear train is to reduce the rotational speed of the tool while increasing the rotational torque.
Power routers are somewhat different. The cutting tool of the hand-held router is typically direct coupled to the spindle of the motor. In this case, the full rotational speed of the motor is used without gear reduction to rotate the router bit at high speed. Reciprocating saw and jigsaws use yet another type of gear train that translates the rotational motion of the motor spindle to reciprocating movement.
Generally speaking, all of these power tools may suddenly encounter an impending kickback condition at which time the output torque rapidly rises because of local changes in workpiece hardness, workpiece binding, tool obstruction from burrs and so forth. For example, when drilling a hole with a power drill, some workpieces will develop burrs on the tool exit side of the workpiece. These burrs can engage the flutes of the drill bit, thereby causing a rapid increase in torque as the drill tries to break free. In some instances, the burrs may stop drill bit rotation, thereby causing a strong reaction torque that is imparted to the tool operator as the motor turns the tool in the operator's grasp (rather than turning the drill bit). This reaction is can be problematic if the operator is standing on a ladder and/or holding the tool over their head. A related phenomenon also occurs with power saws. These conditions are hereinafter generally referred to as kickback conditions, regardless of the particular power tool involved or the specific circumstance which give rise to the condition.
Therefore, it is desirable to provide an improved technique for detecting the onset of such kickback conditions in power tools. The statements in this section merely provide background information related to the present disclosure and may not constitute prior art.
In one aspect of the disclosure, a control system is provided for use in a power tool. The control system includes: a rotational rate sensor having a resonating mass and a controller electrically connected to the rotational rate sensor. The rotational rate sensor detects lateral displacement of the resonating mass and generates a signal indicative of the detected lateral displacement, such that lateral displacement is directly proportional to a rotational speed at which the power tool rotates about an axis of the rotary shaft. Based on the generated signal, the controller initiates a protective operation to avoid undesirable rotation of the power tool.
In another aspect of the disclosure, the control scheme employed by the power tool may initiate different protective operations for different tool conditions.
In different aspect of the disclosure, the control scheme may initiate a protective operations based on input from two different sensors.
In yet another aspect of the disclosure, the control scheme employed by the power tool may initiate protective operations based on the rotational energy experienced by the tool.
For a more complete understanding of the invention, its objects and advantages, reference may be made to the following specification and to the accompanying drawings.
The drawing described herein are for illustration purposes only and are not intended to limit the scope of the present disclosure in any way.
In general, the rotary hammer includes a spindle 12 (i.e., a rotary shaft) drivably coupled to an electric motor 14. A chuck 16 is coupled at one end of the spindle 12; whereas a drive shaft 18 of the electric motor 14 is connected via a transmission 22 to the other end of the spindle 12. These components are enclosed within a housing 18. Operation of the tool is controlled through the use an operator actuated switch 24 embedded in the handle of the tool. The switch regulates current flow from a power supply 26 to the motor 14. The power tool may further include a temperature sensor 27. Although a few primary components of the rotary hammer are discussed above, it is readily understood that other components known in the art may be needed to construct an operational rotary hammer.
The power tool 10 is further configured with a control system 30 for detecting and preventing torque conditions which may cause the operator to lose control of the tool. The control system 30 may include a rotational rate sensor 32, a current sensor 34, and a microcontroller 36 embedded in the handle of the power tool 10. Under certain operating conditions, the power tool 10 may rotate in the operator's grasp. In a rotary hammer, the rotational rate sensor 32 is configured to detect rotational motion of the tool about the longitudinal axis of the spindle 12. The rotational rate sensor 32 in turn communicates a signal indicative of any rotational motion to the controller 36 for further assessment. For different power tools, it is envisioned that the sensor may be disposed in a different location and/or configured to detect motion along a different axis.
In a preferred embodiment, the operating principle of the rotational rate sensor 32 is based on the Coriolis effect. Briefly, the rotational rate sensor is comprised of a resonating mass. When the power tool is subject to rotational motion about the axis of the spindle, the resonating mass will be laterally displaced in accordance with the Coriolis effect, such that the lateral displacement is directly proportional to the angular rate. It is noteworthy that the resonating motion of the mass and the lateral movement of the mass occur in a plane which is orientated perpendicular to the rotational axis of the rotary shaft. Capacitive sensing elements are then used to detect the lateral displacement and generate an applicable signal indicative of the lateral displacement. An exemplary rotational rate sensor is the ADXRS150 or ADXRS300 gyroscope device commercially available from Analog Devices. Other types of rotational sensors, such as angular speed sensors, accelerometers, etc., are also within the scope of this disclosure.
The microcontroller 36 assesses the rotational motion of the tool to detect rotational conditions which may cause the operator to lose control of the tool. Upon detecting an unacceptable rotational condition, the microcontroller 36 will initiate a protective operation intended to minimize and/or avoid any undesired rotation of the power tool. For instance, when the angular velocity of the tool exceeds some empirically derived threshold, the microcontroller may cut power to the motor. A few exemplary techniques for assessing the rotational condition of the tool are further described below. It is readily understood that other techniques for assessing the rotational condition of the tool are also within the scope of this disclosure.
Operation of an exemplary control circuit 40 is further described below in relation to FIG. 2 . A power supply circuit 29 is coupled to an AC power line input and supplies DC voltage to operate the microcontroller 36′. The trigger switch 24′ supplies a trigger signal to the microcontroller 36′ which indicates the position or setting of the trigger switch 24′ as it is manually operated by the power tool operator. Drive current for operating the motor 14′ is controlled by a triac drive circuit 42. The triac drive circuit 42 is, in turn, controlled by a signal supplied by microcontroller 36′. If desired, the control system 30′ may include a reset circuit 44 which, when activated, causes the microcontroller 36′ to be re-initialized.
The microcontroller 36′ is also supplied with a signal from a current detector circuit 48. The current detector circuit 48 is coupled to the triac drive circuit 42 and supplies a signal indicative of the conductive state of the triac drive circuit 42. If for some reason the triac drive circuit 42 does not turn on in response to the control signal from the microcontroller 36′, this condition is detected by the current detector circuit 48.
A current sensor 34′ is connected in series with the triac drive circuit 42 and the motor 14′. In an exemplary embodiment, the current sensor 34′ may be a low resistance, high wattage resistor. The voltage drop across the current sensor 34′ is measured as an indication of actual instantaneous motor current. The instantaneous motor current is supplied to an average current measuring circuit 46 which in turn supplies the average current value to the microcontroller 36′. The microcontroller 36′ may use the average current to evaluate the rotational condition of the tool.
In operation, the trigger switch 24′ supplies a trigger signal that varies in proportion to the switch setting to the microcontroller 36′. Based on this trigger signal, the microcontroller 36′ generates a control signal which causes the triac drive circuit 42 to conduct, thereby allowing the motor 14′ to draw current. Motor torque is substantially proportional to the current drawn by the motor and the current draw is controlled by the control signal sent from the microcontroller to the triac drive circuit 42. Thus, the microcontroller 36′ can control the torque imparted by the motor.
Pulse mode is an exemplary protective operation which may be initiated upon detecting a kickback condition. Upon detecting the onset of a kickback condition, the microcontroller 36′ may operate the motor 14′ in a pulse mode. During pulse mode, the motor current is pulsed at a predetermined frequency with a predetermined on-time. In one exemplary embodiment, the series of current pulses is designed such that the operator may regain control of a twisting tool. For example, the time between pulses may be set between 0.1 and 1 second. Alternatively, the series of current pulses create torque pulses that may have a peak torque that is greater than the average torque delivered by the spindle 12. In this way, the torque pulses may allow the tool 10 to break through the burrs or workpiece restrictions that are causing the impending kickback condition. Further details regarding this protection operation may be found in U.S. Pat. No. 6,479,958 which is incorporated herein by reference.
Another exemplary protective operation is to reduce the torque imparted to the spindle to a non-zero value that enables an operator of the tool to regain control of the tool. In the context of the control circuit 40 described above, the controller can override the trigger signal from the trigger switch or other operator input commands. Upon detecting a triggering rotational condition, the controller 36′ sends a control signal to the triac drive circuit 46′ which reduces the voltage which in turn reduces the current draw of the motor, thereby reducing the torque imparted to the spindle. For example, the torque could be reduced to 30% of its current operational amount or a predefined fixed torque level. The tool would operate at his reduced level until the operator released the trigger switch and re-engaged it or cycled tool power. Another method would involve resetting torque to its original operation level if the operator regains control of the tool. In this way, the operator has regained control of the tool without terminating or resetting operation of the tool.
Other techniques for reducing the torque imparted to the spindle are also within the scope of this disclosure. For example, DC operated motors are often controlled by pulse width modulation, where the duty cycle of the modulation is proportional the speed of the motor and thus the torque imparted by the motor to the spindle. In this example, the microcontroller may be configured to control the duty cycle of the motor control signal.
Alternatively, the power tool may be configured with a torque transmitting device interposed between the motor and the spindle. In this case, the controller may interface with the torque transmitting device to reduce torque. The torque transmitting device may take the form of a magneto-rheologocical fluid clutch which can vary the torque output proportional to the current fed through a magnetic field generating coil. It could also take the form of a friction plate, cone clutch or wrap spring clutch which can have variable levels of slippage based on a preload holding the friction materials together and thus transmitting torque. In this example, the preload could be changed by driving a lead screw supporting the ground end of the spring through a motor, solenoid or other type of electromechanical actuator. Other types of torque transmitting devices are also contemplated by this disclosure.
In other instances, the protective operation is intended to terminate or reset operation of the tool. Exemplary protective operations of this nature include (but are not limited to) disengaging the motor 14′ from the spindle 12, braking the motor 14′, braking the spindle 12, and disconnecting power to the motor 14′. Depending on the size and orientation of the tool 10, one or more of these protective operations may be initiated to prevent undesirable rotation of the tool 10.
An exemplary method for detecting a rotational condition of the tool is illustrated in FIG. 3 . First, the operator switch is checked at step 52 to determine if the tool is operating. If the switch is not closed, then power is not being supplied to the motor as indicated at 53. In this case, there is no need to monitor for kickback conditions. Conversely, if the switch is closed, then power is being supplied to the motor as indicated at 54.
During tool operation, rotational motion of the tool is monitored at 56 based on the signal from the rotational rate sensor. When the rotational rate of the tool exceeds some empirically derived threshold (as shown at 57), this may indicate the onset of kickback condition; otherwise, processing control returns to the beginning of the algorithm. In addition to rotational rate of the tool about its spindle axis, it is envisioned that the rotational displacement, rotational acceleration, or some combination thereof as derived from the sensor signal may be used to determine the onset of a kickback condition.
Prior to initiating some protective operation, the microcontroller also evaluates the current draw of the motor at 58. Specifically, the rate of change of the motor current is measured. When the rate of change is positive and exceeds some predetermined threshold, then one or more protective operations are initiated at 60. If either the rate of change is not positive or the rate of change does not exceeds the threshold, then processing control returns to the beginning of the algorithm. In this case, a sudden change in the current draw is optionally used to confirm the onset of the kickback condition. It is envisioned that inputs from other sensors, such as a temperature sensor, may be used in a similar manner. It is to be understood that only the relevant steps of the control scheme are discussed above, but that other software-implemented instructions may be needed to control and manage the overall operation of the tool.
In another aspect of the present invention, the control scheme employed by the power tool 10 may initiate different protective operations for different tool conditions. For example, the amount of angular displacement experienced by the tool may dictate different protective operations. When angular displacement is within a first range (e.g., less than 31°), the operator is presumed to have control of the tool and thus no protective operations are needed. When the angular displacement exceeds this first range, it may be presumed that the tool has encountered a kickback condition and therefore some protective operation may be needed. In this second range of angular displacement (e.g., between 30° to 90°), the control scheme may initiate a pulse mode in hope of breaking through the restrictions that are causing the impending kickback condition. In contrast, when the angular displacement exceeds the second range (e.g., greater than 90°), it may be presumed that the operator has lost control of the tool. In this instance, a different protective operation may be initiated by the control scheme, such as disconnecting the power to the motor.
Depending on the complexity of the control scheme, three or more ranges of displacement may be defined for a given power tool. Within a range, protective operations may be initiated based on the angular displacement or a combination of parameters, such as angular acceleration, angular velocity, motor current, rate of change of motor current, motor temperature, switch temperature, etc. It is readily understood that the number and size of the ranges may vary for different control schemes and/or different types of tools. It is also envisioned that different protective operations may be initiated based on ranges of other parameters (e.g., ranges of angular velocity). Likewise, one or more protective operations may be associated with different ranges (i.e., tool conditions).
An exemplary method for detecting a rotational condition based on an angular displacement of the power tool is further described below in relation to FIGS. 4A and 4B . During tool operation, angular displacement is monitored in relation to a start point (θ0). In step 61, this starting point is initialized to zero. Any subsequent angular displacement of the tool is then measured in relation to this reference. Alternatively, the tool may employ a starting point reset function. At power-up, the starting point is set. If the operator repositions the tool (e.g., rotate it at a very slow rate), then the starting point is reset. For example, if the tool is rotated at a rate less than 5 degree per second, then the starting position is reset. Angular displacement is then measured from the new starting point.
Angular displacement of the tool is then monitored at step 62. In this exemplary embodiment, the angular displacement is measured in relation to the reference value (θ0) and derived from the rate of angular displacement over time or angular velocity (ωTOOL) as provided by a rotational rate sensor. While the rotational rate sensor described above is presently preferred for determining angular displacement of the tool, it is readily understood that this additional aspect of the present invention is not limited to this type of sensor. On the contrary, angular displacement may be derived from a different type of rotational rate sensor, an acceleration sensor or some other manner for detecting rotational displacement of the tool.
Different protective operations may be initiated based on the amount of angular displacement as noted above. Angular displacement is assessed at steps 64 and 68. When the angular displacement exceeds some upper threshold (θzone2 — min), then a first protective operation is initiated at step 66. In this example, power to the motor is disconnected, thereby terminating operation of the tool.
When the angular displacement exceeds some lower threshold (θzone1 — min), then a different protective operation, such as pulsing the motor current, may be initiated at 70. In this exemplary embodiment, an instantaneous measure of angular velocity must also exceed some minimum threshold before a pulse mode is initiated as shown at step 69. If neither of these criteria are met, no protective actions are taken and operating conditions of tool continue to be monitored by the control scheme.
During pulse mode, the control scheme continues to monitor tool operating conditions. Hazardous conditions may be monitored as shown at step 72. For instance, to prevent motor burn up, motor current may be monitored. If the motor current spikes above some predefined threshold, then power to the motor is disconnected at 73. To protect the tool operator, angular displacement may also be monitored. If angular displacement exceeds a threshold indicative of lost control, then the power to the motor is also disconnected. It is readily understood that other types of hazardous conditions may be monitored.
In addition, pulse mode is only maintained for a brief period of time. A timer is initiated at step 71 and pulse mode continues until the timer has expired as shown at 76. During this time, the control scheme may also monitor if the restrictions that caused the kickback condition have been overcome as shown at step 74. If the restrictions are overcome, then pulse mode is discontinued at step 75. When the timer expires without overcoming the restrictions, then power to the motor is disconnected as shown at 77.
An exemplary method for detecting a rotational condition based on input from at least two sensors is described below in relation to FIG. 5 . First, the operator switch is checked at step 82 to determine if the tool is operating. If the switch is not closed, then power is not being supplied to the motor as indicated at 83. In this case, there is no need to monitor for kickback conditions. Conversely, if the switch is closed, then power is being supplied to the motor as indicated at 84.
During tool operation, rotational motion of the tool is monitored at 86 based on the signal from the rotational rate sensor. When the rotational rate of the tool exceeds some empirically derived threshold (as shown at 87), this may indicate the onset of kickback condition; otherwise, processing control returns to the beginning of the algorithm. In addition to rotational rate of the tool about its spindle axis, it is envisioned that the rotational displacement, rotational acceleration, or some combination thereof as derived from the sensor signal may be used to determine the onset of a kickback condition.
Prior to initiating some protective operation, the microcontroller also evaluates the current draw of the motor at 88. Specifically, the rate of change of the motor current is measured. When the rate of change is positive and exceeds some predetermined threshold, then one or more protective operations are initiated at 90. If either the rate of change is not positive or the rate of change does not exceeds the threshold, then processing control returns to the beginning of the algorithm. In this case, a sudden change in the current draw is used to confirm the onset of the kickback condition. While the above description was provided with reference to a rotational rate sensor and a current sensor, it is readily understood that the broader aspects of the present invention encompass making such a determination may be based on input from other types of sensors.
Determination of a rotational condition may also be based on other types of criteria. For example, a rotational condition may be assessed based on the rotational energy experienced by the power tool. In this example, rotational energy is defined as Eω — TOOL=(I)(ωTOOL)2, where I is the moment of inertia and ωTOOL is the angular velocity. For this computation, the rate of angular displacement could be measured by a rotational rate sensor; whereas, the moment of inertia of the tool (ITOOL) could be preprogrammed into the controller based on the mass properties of the power tool (e.g., mass, rotation inertia and a center of gravity position) and a distance measure between the center of gravity position and the spindle axis. Initiating a protective operation based on Eω — TOOL is desirable because the energy condition is not tool specific and therefore could be applied to a variety of anti-kickback applications. Other criteria for determining a kickback condition are also within the broader aspects of the present invention.
During normal tool operation, sensor output is processed as follows. In this exemplary embodiment, the sensor output is rotational velocity. The sensor output passes through a low pass filter 111 before going into a null point and gain calibration routine 112. The purpose of the calibration routine is to remove any offset and compensate for any gains of the rate sensor before determining rotational conditions. Through either software or hardware means, the rate signal is then integrated at 113 to get position and derived at 114 to get acceleration. All three of the signals are then input to a comparator 115 which checks whether or not the value has exceeded a defined threshold. A logic block 116 (e.g., AND, OR, etc.) is configured so that any or all of the thresholds must be met before indicating a trip signal which is sent to the motor controller 36″. Although the tests are shown as comparators on position, rate, or acceleration, it is noted that the tests are not limited to thresholds alone. Combinations of each variable can be used such as if the rate is less than W then position must be greater than X for a trip event to occur. In another example, if rate is greater than Y then position must be greater than Z for a trip to occur.
In lieu of comparison functions, the control system may employ a look-up table as shown in FIG. 7 . In this example, rotational position is charted against rotational velocity. Look-up tables having other parameters and further dimensions are also contemplated. Additionally, the values in the table may indicate the type of protective operation or point to another table for more processing.
An exemplary calibration procedure for a power tool is further described in relation to FIG. 9 . First, a calibration routine is downloaded at 130 from the PC into the test module 124. The calibration routine cooperatively operates with the software routines of the control system to determine calibration values for the control system. The calibration, procedure begins with the test module 124 measuring the output of the rotational rate sensor at 131 while the power tool remains stationary. This measured output serves as an offset or null calibration value (i.e., output value of the sensor when angular velocity is zero) for the rotational rate sensor. Next, the personal computer commands the test fixture 132 to rotate the test module 124 (e.g., clockwise) at predefined angular velocity for a predefined period of time. For example, the test fixture 122 may rotate the test module 124 at 50 degrees per second until 50 degrees of rotation is reached. During this movement, the test module is capturing the angular velocity as reported by the rotational rate sensor. The test module will compare the angular velocity 133 as reported by the rotational rate sensor with the known angular velocity at which the test module was rotated by the test fixture to determine a gain value. The gain value is temporarily stored by the test module for subsequent processing.
The personal computer then commands the test fixture 134 to rotate the test module in an opposite direction (e.g., counter-clockwise) at a predefined angular velocity for a predefined period of time. The test module again captures the angular velocity as reported by the rotational rate sensor and compares these captured values 135 with the known angular velocity to determine another gain value. The second gain value is also stored by the test module. Thus, there is a gain value for each direction of tool rotation.
To confirm the calibration values, the personal computer re-executes the calibration procedure at 136. In other words, the test fixture is commanded to rotate the test module at the predefined angular velocity in one direction and then in the opposite direction. The test module again captures the angular velocity as reported by the rotational rate sensor. At this point, the test module adjusts the measured angular velocity using the applicable calibration values and compares the adjusted values to the known angular velocity at which the test module was rotated by the test fixture. If the adjusted values fall within some defined tolerance of the expected values, these calibration values are sent by the test module to the personal computer. These calibration values can then be downloaded into memory of a power tool. During operation, the control system of the power tool will use the calibration values to adjust the output reported by the rotational rate sensor. It is readily understood that this type of calibration procedure may be undertaken for each power tool or once for each family of power tools.
The above description is merely exemplary in nature and is not intended to limit the present disclosure, application, or uses.
Claims (30)
1. A method for initiating a protective response in a power tool having a rotary shaft, comprising:
monitoring rotational motion of the power tool about a longitudinal axis of the rotary shaft using a rotational motion sensor disposed in the power tool;
computing angular displacement of the power tool about the axis of the rotary shaft using a controller disposed in the power tool and based on input from the rotational motion sensor;
initiating a protective operation by the controller when an operating condition of the power tool exceeds a threshold and the angular displacement of the power tool falls within a range of angular displacements; and
initiating a protective operation by the controller when the operating condition of the power tool is less than the threshold but the angular displacement of the power tool exceeds the range of angular displacements.
2. The method of claim 1 further comprises initiating a protective operation when angular velocity of the power tool about the axis exceeds a velocity threshold and the angular displacement of the power tool falls within the range of angular displacements.
3. The method of claim 1 further comprises initiating a protective operation when angular displacement of the power tool falls within a range of angular displacements and angular acceleration of the power tool about the axis exceeds an acceleration threshold.
4. The method of claim 1 further comprises arranging the rotational motion sensor at a location in the power tool spatially separated from the rotary shaft.
5. The method of claim 1 further comprises employing a rotational motion sensor that measures rotational velocity based on Coriolis acceleration.
6. The method of claim 1 wherein the protective operation when angular displacement of the power tool falls within a range of angular displacements is different than the protective operation when angular displacement of the power tool exceeds the range of angular displacements.
7. The method of claim 1 wherein the protective operation is selected from the group consisting of pulsing a motor of the power tool, braking the rotary shaft, braking the motor, disengaging the motor from the rotary shaft, discontinuing power delivered to the motor and reducing slip torque of a clutch disposed between the motor and the rotary shaft.
8. A method for initiating a protective response in a power tool having a motor drivably coupled to a rotary shaft to impart rotary motion thereto, comprising:
monitoring rotational motion of the power tool about a longitudinal axis of the rotary shaft using a rotational motion sensor disposed in the power tool;
determining angular displacement of the power tool about the axis of the rotary shaft from a baseline using a controller disposed in the power tool and based on input from the rotational motion sensor;
initiating a protective operation in the power tool by the controller when a first operating condition of the power tool exceeds a first operating threshold and angular displacement of the power tool falls within a first range of angular displacements; and
initiating a protective operation in the power tool by the controller when a second operating condition of the power tool exceeds a second operating threshold and angular displacement of the power tool falls within a second range of angular displacements, where the second operating condition is different than the first operating condition and the second range of angular displacements is mutually exclusive of the first range of angular displacements.
9. The method of claim 8 further comprises initiating a protective operation when angular velocity of the power tool about the axis exceeds a velocity threshold and angular displacement of the power tool falls within the first range of angular displacements.
10. The method of claim 9 further comprises initiating a protective operation when angular velocity of the power tool is less than the velocity threshold and angular displacement of the power tool falls within the second range of angular displacements.
11. The method of claim 8 further comprises arranging the rotational motion sensor at a location in the power tool spatially separated from the rotary shaft.
12. The method of claim 8 further comprises employing a rotational motion sensor that measures rotational velocity based on Coriolis acceleration.
13. The method of claim 8 further comprises periodically resetting the baseline when angular velocity of the power tool about the axis is less than a velocity threshold.
14. The method of claim S wherein the protective operation is selected from the group consisting of pulsing a motor of the power tool, braking the rotary shaft, braking the motor, disengaging the motor from the rotary shaft, discontinuing power delivered to the motor and reducing slip torque of a clutch disposed between the motor and the rotary shaft.
15. A method for initiating a protective response in a power tool having a rotary shaft, comprising:
monitoring rotational motion of the power tool about a longitudinal axis of the rotary shaft using a rotational motion sensor disposed in the power tool;
computing angular displacement of the power tool about the axis of the rotary shaft from a baseline using a controller disposed in the power tool and based on input from the rotational motion sensor;
periodically resetting the baseline when angular velocity of the power tool about the axis is less than a velocity threshold;
initiating a protective operation by the controller when an operating condition of the power tool exceeds a threshold and the angular displacement of the power tool falls within a range of angular displacements; and
initiating a protective operation by the controller when the operating condition of the power tool is less than the threshold but the angular displacement of the power tool exceeds the range of angular displacements.
16. A method for controlling operation of a power tool having a rotary shaft, comprising:
monitoring rotational motion of the power tool about a longitudinal axis of the rotary shaft using a rotational motion sensor disposed in the power tool;
computing angular displacement of the power tool about the axis of the rotary shaft based on input from the rotational motion sensor and using a controller disposed in the power tool; and
driving the rotary shaft at a given rotational speed, where the given rotational speed is set to a non-zero value based on the angular displacement of the power tool.
17. The method of claim 16 wherein the computing angular displacement further comprises determining the angular displacement of the power tool in relation to a reference position and driving the rotary shaft at the given rotational speed when the angular displacement from the reference position exceeds a displacement threshold.
18. The method of claim 16 wherein the computing angular displacement further comprises determining the angular displacement of the power tool in relation to a reference position and lowering rotational speed of the rotary shaft to a non-zero value when the angular displacement from the reference position exceeds a displacement threshold.
19. The method of claim 16 further comprises arranging the rotational motion sensor at a location in the power tool spatially separated from the rotary shaft.
20. A method for controlling operation of a power tool having a rotary shaft, comprising:
monitoring rotational motion of the power tool about a longitudinal axis of the rotary shaft using a rotational motion sensor disposed in the power tool;
computing angular displacement of the power tool about the axis of the rotary shaft based on input from the rotational motion sensor and using a controller disposed in the power tool;
driving the rotary shaft at a first rotational speed when the angular displacement is less than a displacement threshold; and
driving the rotary shaft at a second rotational speed having a non-zero value when the angular displacement is greater than the displacement threshold, where the second rotational speed differs from the first rotational speed.
21. The method of claim 20 wherein the computing angular displacement further comprises determining the angular displacement of the power tool in relation to a reference position and driving the rotary shaft at the given rotational speed when the angular displacement from the reference position exceeds a displacement threshold.
22. The method of claim 20 wherein the computing angular displacement further comprises determining the angular displacement of the power tool in relation to a reference position and lowering rotational speed of the rotary shaft to a non-zero value when the angular displacement from the reference position exceeds a displacement threshold.
23. The method of claim 20 further comprises arranging the rotational motion sensor at a location in the power tool spatially separated from the rotary shaft.
24. A control system for a power tool having an output shaft, comprising:
a motor disposed in the power tool and drivably connected to the output shaft to impart rotary motion thereto;
a rotational motion sensor disposed in the power tool and operable to detect rotational motion of the tool about a longitudinal axis of the output shaft; and
a controller configured to receive a signal indicative of rotational motion of the tool from the rotational motion sensor and operable to determine angular displacement of the power tool about the axis of the output shaft from the signal, the controller electrically connected to the motor and operable to set rotational speed of the motor to a non-zero value based on the angular displacement of the power tool.
25. The control system of 24 wherein the controller determines the angular displacement of the power tool in relation to a reference position and sets the rotational speed of the motor to a non-zero value when the angular displacement from the reference position exceeds a displacement threshold.
26. The control system of claim 24 wherein the controller determines the angular displacement of the power tool in relation to a reference position and lowers rotational speed of the motor to a non-zero value when the angular displacement from the reference position exceeds a displacement threshold.
27. The control system of claim 24 wherein the rotational motion sensor having a resonating mass and being operable to detect lateral displacement of the resonating mass, the rotational motion sensor is further operable to generate a signal indicative of the detected lateral displacement, such that the lateral displacement is directly proportional to a rotational speed at which the power tool rotates about an axis of the output shaft.
28. The control system of claim 27 wherein the resonating motion of the mass and the lateral movement of the mass occur in a plane which is orientated perpendicular to the rotational axis of the output shaft.
29. The control system of claim 24 wherein the rotational motion sensor is further defined as a gyroscope.
30. A power tool comprising:
a housing;
an output shaft at least partially contained in the housing and configured to rotate about a longitudinal axis;
a motor contained in the housing and drivably connected to the output shaft to impart rotary motion thereto;
a rotational motion sensor arranged in the housing at a location spatially separated from the output shaft and operable to detect rotational motion of the housing about the longitudinal axis of the output shaft;
a controller configured in the housing to receive a signal indicative of rotational motion from the rotational motion sensor and operable to determine angular displacement of the housing in relation to a reference position from the signal, the controller electrically connected to the motor and operable to set rotational speed of the motor to a non-zero value when the angular displacement from the reference position exceeds a displacement threshold.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US13/600,927 USRE45112E1 (en) | 2004-10-20 | 2012-08-31 | Power tool anti-kickback system with rotational rate sensor |
Applications Claiming Priority (7)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US62028304P | 2004-10-20 | 2004-10-20 | |
| US67569205P | 2005-04-28 | 2005-04-28 | |
| US11/254,146 US7410006B2 (en) | 2004-10-20 | 2005-10-19 | Power tool anti-kickback system with rotational rate sensor |
| US11/519,427 US7552781B2 (en) | 2004-10-20 | 2006-09-12 | Power tool anti-kickback system with rotational rate sensor |
| US12/008,823 US7681659B2 (en) | 2004-10-20 | 2008-01-14 | Power tool anti-kickback system with rotational rate sensor |
| US13/423,736 USRE44311E1 (en) | 2004-10-20 | 2012-03-19 | Power tool anti-kickback system with rotational rate sensor |
| US13/600,927 USRE45112E1 (en) | 2004-10-20 | 2012-08-31 | Power tool anti-kickback system with rotational rate sensor |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US12/008,823 Reissue US7681659B2 (en) | 2004-10-20 | 2008-01-14 | Power tool anti-kickback system with rotational rate sensor |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| USRE45112E1 true USRE45112E1 (en) | 2014-09-09 |
Family
ID=38846998
Family Applications (5)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US11/519,427 Expired - Lifetime US7552781B2 (en) | 2004-10-20 | 2006-09-12 | Power tool anti-kickback system with rotational rate sensor |
| US12/008,823 Expired - Lifetime US7681659B2 (en) | 2004-10-20 | 2008-01-14 | Power tool anti-kickback system with rotational rate sensor |
| US13/423,736 Expired - Lifetime USRE44311E1 (en) | 2004-10-20 | 2012-03-19 | Power tool anti-kickback system with rotational rate sensor |
| US13/600,927 Expired - Lifetime USRE45112E1 (en) | 2004-10-20 | 2012-08-31 | Power tool anti-kickback system with rotational rate sensor |
| US13/600,722 Expired - Lifetime USRE44993E1 (en) | 2004-10-20 | 2012-08-31 | Power tool anti-kickback system with rotational rate sensor |
Family Applications Before (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US11/519,427 Expired - Lifetime US7552781B2 (en) | 2004-10-20 | 2006-09-12 | Power tool anti-kickback system with rotational rate sensor |
| US12/008,823 Expired - Lifetime US7681659B2 (en) | 2004-10-20 | 2008-01-14 | Power tool anti-kickback system with rotational rate sensor |
| US13/423,736 Expired - Lifetime USRE44311E1 (en) | 2004-10-20 | 2012-03-19 | Power tool anti-kickback system with rotational rate sensor |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US13/600,722 Expired - Lifetime USRE44993E1 (en) | 2004-10-20 | 2012-08-31 | Power tool anti-kickback system with rotational rate sensor |
Country Status (4)
| Country | Link |
|---|---|
| US (5) | US7552781B2 (en) |
| EP (2) | EP1900484B1 (en) |
| CN (1) | CN201152938Y (en) |
| WO (1) | WO2008033310A2 (en) |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10357871B2 (en) | 2015-04-28 | 2019-07-23 | Milwaukee Electric Tool Corporation | Precision torque screwdriver |
| US10981267B2 (en) | 2017-10-26 | 2021-04-20 | Milwaukee Electric Tool Corporation | Kickback control methods for power tools |
| US11077509B2 (en) | 2018-03-16 | 2021-08-03 | Milwaukee Electric Tool Corporation | Pipe threader |
| US11400570B2 (en) | 2015-04-28 | 2022-08-02 | Milwaukee Electric Tool Corporation | Precision torque screwdriver |
| US11529725B2 (en) | 2017-10-20 | 2022-12-20 | Milwaukee Electric Tool Corporation | Power tool including electromagnetic clutch |
| US11705721B2 (en) | 2020-03-10 | 2023-07-18 | Milwaukee Electric Tool Corporation | Kickback control methods for a power tool including a force sensor |
| US11752604B2 (en) | 2018-04-13 | 2023-09-12 | Snap-On Incorporated | System and method for measuring torque and angle |
| US11845173B2 (en) | 2020-10-16 | 2023-12-19 | Milwaukee Electric Tool Corporation | Anti bind-up control for power tools |
| US20240189975A1 (en) * | 2022-12-08 | 2024-06-13 | CSP Consulting, LLC | Rotary tool with reduced reactionary torque |
| US12059777B2 (en) | 2020-08-10 | 2024-08-13 | Milwaukee Electric Tool Corporation | Powered screwdriver including clutch setting sensor |
Families Citing this family (131)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7552781B2 (en) | 2004-10-20 | 2009-06-30 | Black & Decker Inc. | Power tool anti-kickback system with rotational rate sensor |
| US8316958B2 (en) * | 2006-07-13 | 2012-11-27 | Black & Decker Inc. | Control scheme for detecting and preventing torque conditions in a power tool |
| DE102008000704A1 (en) * | 2007-04-24 | 2008-10-30 | Robert Bosch Gmbh | Power tool and device switch for a power tool |
| EP2030709A3 (en) * | 2007-08-29 | 2013-01-16 | Positec Power Tools (Suzhou) Co., Ltd. | Power tool |
| SE533215C2 (en) * | 2008-05-08 | 2010-07-20 | Atlas Copco Tools Ab | Method and apparatus for tightening joints |
| US7787981B2 (en) | 2008-05-16 | 2010-08-31 | Xerox Corporation | System for reliable collaborative assembly and maintenance of complex systems |
| CN102131469B (en) | 2008-06-26 | 2013-07-17 | W·安德森 | Depth controllable and measurable medical driving device and method of use |
| US8269612B2 (en) | 2008-07-10 | 2012-09-18 | Black & Decker Inc. | Communication protocol for remotely controlled laser devices |
| FR2935496B1 (en) * | 2008-08-29 | 2014-05-16 | Pellenc Sa | METHOD FOR STOPPING PORTABLE TOOLS DURING UNEXPECTED BRUSH MOVEMENTS, AND PORTABLE TOOLS BY APPLYING |
| US10870216B2 (en) * | 2008-09-30 | 2020-12-22 | Black & Decker Inc. | Table saws having integrated control systems |
| EP2177322B1 (en) * | 2008-10-20 | 2014-05-07 | CEKA Elektrowerkzeuge AG + Co. KG | Tool unit for an electrical tool, electrical tool and method for operating same |
| US8212511B2 (en) * | 2008-10-22 | 2012-07-03 | Kelsey-Hayes Company | Method and apparatus for limiting torque in an electric drive motor |
| JP5403328B2 (en) * | 2009-02-02 | 2014-01-29 | 日立工機株式会社 | Electric drilling tool |
| US8317350B2 (en) | 2009-02-25 | 2012-11-27 | Black & Decker Inc. | Power tool with a light for illuminating a workpiece |
| DE102009001132B4 (en) * | 2009-02-25 | 2022-04-28 | Robert Bosch Gmbh | power tool |
| US20110058356A1 (en) | 2009-02-25 | 2011-03-10 | Black & Decker Inc. | Power tool with light emitting assembly |
| US8328381B2 (en) | 2009-02-25 | 2012-12-11 | Black & Decker Inc. | Light for a power tool and method of illuminating a workpiece |
| FR2944465B1 (en) * | 2009-04-17 | 2012-06-08 | Renault Georges Ets | PORTABLE TOOL INCORPORATING MEANS FOR OBTAINING AT LEAST ONE PARAMETER OF MOVEMENT OF THE TOOL CASING. |
| JP5462575B2 (en) * | 2009-10-05 | 2014-04-02 | 株式会社マキタ | Electric tool |
| JP5537122B2 (en) * | 2009-11-02 | 2014-07-02 | 株式会社マキタ | Electric tool |
| DE102009046789A1 (en) * | 2009-11-17 | 2011-05-19 | Robert Bosch Gmbh | Hand machine tool device |
| US8418778B2 (en) * | 2010-01-07 | 2013-04-16 | Black & Decker Inc. | Power screwdriver having rotary input control |
| US9266178B2 (en) | 2010-01-07 | 2016-02-23 | Black & Decker Inc. | Power tool having rotary input control |
| US9475180B2 (en) | 2010-01-07 | 2016-10-25 | Black & Decker Inc. | Power tool having rotary input control |
| CN102753782B (en) * | 2010-01-07 | 2015-09-30 | 布莱克和戴克公司 | There is the electric screw driver rotating input control |
| CN102770247A (en) * | 2010-02-17 | 2012-11-07 | 加德纳制造有限责任公司 | Power tools |
| ES2534354T3 (en) * | 2010-03-31 | 2015-04-21 | Alfing Montagetechnik Gmbh | Mounting device and mounting procedure |
| US8894654B2 (en) * | 2010-03-31 | 2014-11-25 | Smart Medical Devices, Inc. | Depth controllable and measurable medical driver devices and methods of use |
| JP5464434B2 (en) * | 2010-03-31 | 2014-04-09 | 日立工機株式会社 | Electric tool |
| DE102010027981A1 (en) * | 2010-04-20 | 2011-10-20 | Robert Bosch Gmbh | angle |
| DE102010030825A1 (en) * | 2010-07-01 | 2012-01-05 | Hilti Aktiengesellschaft | Hand tool |
| CA2807990A1 (en) * | 2010-08-11 | 2012-02-16 | Blount, Inc. | Kickback detection method and apparatus |
| US12059780B2 (en) | 2010-09-30 | 2024-08-13 | Black & Decker Inc. | Lighted power tool |
| US9328915B2 (en) | 2010-09-30 | 2016-05-03 | Black & Decker Inc. | Lighted power tool |
| US9028088B2 (en) | 2010-09-30 | 2015-05-12 | Black & Decker Inc. | Lighted power tool |
| DE102010043361A1 (en) * | 2010-11-04 | 2012-05-10 | Robert Bosch Gmbh | Electronic shutdown of a power tool on reaching a current limit |
| US10442065B2 (en) * | 2011-05-23 | 2019-10-15 | Illinois Tool Works Inc. | Stud miss indicator for fastener driving tool |
| WO2012167241A1 (en) | 2011-06-02 | 2012-12-06 | Black & Decker Inc. | Control system for a fastening power tool |
| US9352456B2 (en) | 2011-10-26 | 2016-05-31 | Black & Decker Inc. | Power tool with force sensing electronic clutch |
| FR2985447B1 (en) * | 2012-01-05 | 2014-09-05 | Illinois Tool Works | ROTARY HAND TOOL WITH ANTI-ROTATION CONTROL MODULE |
| US9908182B2 (en) | 2012-01-30 | 2018-03-06 | Black & Decker Inc. | Remote programming of a power tool |
| EP2631035B1 (en) | 2012-02-24 | 2019-10-16 | Black & Decker Inc. | Power tool |
| DE102012205714A1 (en) * | 2012-04-05 | 2013-10-10 | Robert Bosch Gmbh | Hand tool housing |
| US9193055B2 (en) | 2012-04-13 | 2015-11-24 | Black & Decker Inc. | Electronic clutch for power tool |
| US9242355B2 (en) | 2012-04-17 | 2016-01-26 | Black & Decker Inc. | Illuminated power tool |
| JP5852509B2 (en) * | 2012-05-29 | 2016-02-03 | 株式会社マキタ | Electric tool |
| US9381635B2 (en) | 2012-06-05 | 2016-07-05 | Illinois Tool Works Inc. | Fastener-driving tool including a fastening result detector |
| US20130327552A1 (en) * | 2012-06-08 | 2013-12-12 | Black & Decker Inc. | Power tool having multiple operating modes |
| US8919456B2 (en) | 2012-06-08 | 2014-12-30 | Black & Decker Inc. | Fastener setting algorithm for drill driver |
| DE102012210746A1 (en) * | 2012-06-25 | 2014-01-02 | Robert Bosch Gmbh | power tool |
| US20140053419A1 (en) * | 2012-08-06 | 2014-02-27 | Black & Decker Inc. | Control circuit for reciprocating saws |
| US20140166323A1 (en) * | 2012-09-16 | 2014-06-19 | J. Carl Cooper | Kickback Reduction for Power Tools and Machines |
| US10821591B2 (en) | 2012-11-13 | 2020-11-03 | Milwaukee Electric Tool Corporation | High-power cordless, hand-held power tool including a brushless direct current motor |
| JP6024470B2 (en) | 2013-01-17 | 2016-11-16 | 日立工機株式会社 | Electric tool |
| CN104936746B (en) * | 2013-01-24 | 2017-06-09 | 日立工机株式会社 | Electric tool |
| DE102013201708B4 (en) * | 2013-02-01 | 2023-12-14 | Robert Bosch Gmbh | Electric machine tool and method for controlling the electric machine tool |
| EP2799170A1 (en) * | 2013-04-30 | 2014-11-05 | HILTI Aktiengesellschaft | Handheld machine tool and control method |
| US9597784B2 (en) * | 2013-08-12 | 2017-03-21 | Ingersoll-Rand Company | Impact tools |
| US9370372B2 (en) * | 2013-09-04 | 2016-06-21 | Mcginley Engineered Solutions, Llc | Drill bit penetration measurement systems and methods |
| US9833244B2 (en) | 2013-11-08 | 2017-12-05 | Mcginley Engineered Solutions, Llc | Surgical saw with sensing technology for determining cut through of bone and depth of the saw blade during surgery |
| JP6148609B2 (en) * | 2013-11-21 | 2017-06-14 | 株式会社マキタ | Electric tool |
| DE102013224759A1 (en) * | 2013-12-03 | 2015-06-03 | Robert Bosch Gmbh | Machine tool device |
| DE102014211891A1 (en) * | 2014-06-20 | 2015-12-24 | Robert Bosch Gmbh | Method for operating a power tool |
| WO2016025500A1 (en) | 2014-08-12 | 2016-02-18 | Robert Bosch Gmbh | System and method for kickback detection in a circular saw |
| EP2985117A1 (en) * | 2014-08-12 | 2016-02-17 | HILTI Aktiengesellschaft | Optimised setting procedure for an expansible anchor |
| CN104656550B (en) * | 2014-09-02 | 2016-04-13 | 苏州宝时得电动工具有限公司 | Electric tool control method and system, electric tool |
| AU2015312037A1 (en) | 2014-09-05 | 2017-03-02 | Mcginley Engineered Solutions, Llc | Instrument leading edge measurement system and method |
| US11571831B2 (en) | 2014-09-25 | 2023-02-07 | Robert Bosch Gmbh | System and method for kickback detection based on blade speed in a power tool |
| EP3023202A1 (en) | 2014-11-20 | 2016-05-25 | HILTI Aktiengesellschaft | Security method and handheld machine tool |
| EP3023203A1 (en) * | 2014-11-20 | 2016-05-25 | HILTI Aktiengesellschaft | Control method for a hand-held machine tool |
| US11059156B2 (en) * | 2015-01-28 | 2021-07-13 | Koki Holdings Co., Ltd. | Impact tool |
| US9833891B2 (en) | 2015-02-23 | 2017-12-05 | James Patterson | Anti-torqueing dynamic arresting mechanism |
| WO2016155663A1 (en) * | 2015-04-02 | 2016-10-06 | 苏州宝时得电动工具有限公司 | Power tool and method for controlling working condition thereof |
| CN107530874A (en) * | 2015-04-27 | 2018-01-02 | 日立工机株式会社 | Electric tool |
| CN107921613B (en) * | 2015-06-02 | 2020-11-06 | 米沃奇电动工具公司 | Multi-speed power tool with electronic clutch |
| DE102015219564A1 (en) * | 2015-10-09 | 2017-04-13 | Robert Bosch Gmbh | TOOL ANALYSIS DEVICE AND METHOD FOR ANALYZING A WORKING OF A WORKPIECE WITH A TOOL |
| US10321921B2 (en) * | 2015-10-27 | 2019-06-18 | Mcginley Engineered Solutions, Llc | Unicortical path detection for a surgical depth measurement system |
| WO2017075224A1 (en) | 2015-10-27 | 2017-05-04 | Mcginley Engineered Solutions, Llc | Techniques and instruments for placement of orthopedic implants relative to bone features |
| WO2017078754A1 (en) * | 2015-11-06 | 2017-05-11 | Mcginley Engineered Solutions, Llc | Measurement system for use with surgical burr instrument |
| WO2017083989A1 (en) * | 2015-11-16 | 2017-05-26 | Ao Technology Ag | Surgical power drill including a measuring unit suitable for bone screw length determination |
| DE102015226084A1 (en) * | 2015-12-18 | 2017-06-22 | Robert Bosch Gmbh | Hand tool machine with a communication interface |
| EP3199303A1 (en) * | 2016-01-29 | 2017-08-02 | HILTI Aktiengesellschaft | Handheld machine tool |
| EP3411204B1 (en) | 2016-02-03 | 2021-07-28 | Milwaukee Electric Tool Corporation | System and methods for configuring a reciprocating saw |
| WO2017139674A1 (en) | 2016-02-12 | 2017-08-17 | Smart Medical Devices, Inc. | Driving devices and methods for determining material strength in real-time |
| TWM552413U (en) | 2016-02-25 | 2017-12-01 | 米沃奇電子工具公司 | Power tool including an output position sensor |
| US10589413B2 (en) | 2016-06-20 | 2020-03-17 | Black & Decker Inc. | Power tool with anti-kickback control system |
| KR102437922B1 (en) * | 2016-06-30 | 2022-08-29 | 아틀라스 콥코 인더스트리얼 테크니크 에이비 | Electric pulse tool with controlled reaction force |
| JP6709129B2 (en) * | 2016-08-05 | 2020-06-10 | 株式会社マキタ | Electric tool |
| EP3335837A1 (en) * | 2016-12-14 | 2018-06-20 | HILTI Aktiengesellschaft | Control method for an impacting handheld machine tool |
| EP3379019B1 (en) * | 2017-03-24 | 2019-09-04 | Techtronic Outdoor Products Technology Limited | Digging apparatus |
| BR112020002878A2 (en) * | 2017-08-17 | 2020-07-28 | Stryker Corporation | portable surgical instrument, and, method to provide feedback to a user of a portable surgical instrument |
| CA3073178A1 (en) * | 2017-08-17 | 2019-02-21 | Stryker Corporation | Surgical handpiece for measuring depth of bore holes and related accessories |
| US11896239B2 (en) * | 2017-08-17 | 2024-02-13 | Stryker Corporation | Surgical handpiece system for depth measurement and related accessories |
| EP3672501B1 (en) * | 2017-08-25 | 2023-06-14 | McGinley Engineered Solutions, LLC | Sensing of surgical instrument placement relative to anatomic structures |
| EP3676055B1 (en) | 2017-08-30 | 2022-07-20 | Milwaukee Electric Tool Corporation | Power tool having object detection |
| AU2018345760A1 (en) | 2017-10-02 | 2020-01-30 | Mcginley Engineered Solutions, Llc | Surgical instrument with real time navigation assistance |
| CN109765048A (en) * | 2017-11-02 | 2019-05-17 | 南京德朔实业有限公司 | Electric tool and the detection method of electric tool recoil |
| GB201800696D0 (en) | 2018-01-16 | 2018-02-28 | Depuy Ireland Ultd Co | Replaceable battery unit for a surgical power tool |
| EP3517252B1 (en) * | 2018-01-26 | 2022-12-14 | Techtronic Outdoor Products Technology Limited | Motion monitoring device for handheld tool |
| WO2019165079A2 (en) * | 2018-02-21 | 2019-08-29 | Lantern Safety Kinetics, Llc | High-precision abnormal motion detection for power tools |
| CN214352217U (en) | 2018-02-28 | 2021-10-08 | 米沃奇电动工具公司 | electrical tools |
| EP3759811B1 (en) * | 2018-02-28 | 2024-04-24 | Milwaukee Electric Tool Corporation | Simulated bog-down system and method for power tools |
| CN108897281A (en) * | 2018-06-06 | 2018-11-27 | 苏州领裕电子科技有限公司 | A kind of tool monitoring system and method |
| JP2020040133A (en) * | 2018-09-06 | 2020-03-19 | パナソニックIpマネジメント株式会社 | Tool system |
| US11103980B2 (en) * | 2018-10-12 | 2021-08-31 | Ingersoll-Rand Industrial U.S., Inc. | Assembly tool smart configuration selector by means of orientation detection |
| JP7210291B2 (en) | 2019-01-10 | 2023-01-23 | 株式会社マキタ | electric driver drill |
| EP3948702A4 (en) | 2019-03-29 | 2023-07-26 | Saint-Gobain Abrasives, Inc. | Performance grinding solutions |
| WO2020206382A1 (en) | 2019-04-03 | 2020-10-08 | Saint-Gobain Abrasives, Inc. | Abrasive article, abrasive system and method for using and forming same |
| KR102903298B1 (en) | 2019-05-15 | 2025-12-24 | 스트리커 코포레이션 | Powered surgical drill with rotating field bit identification |
| EP3756827A1 (en) * | 2019-06-27 | 2020-12-30 | Hilti Aktiengesellschaft | Machine tool and method for operating a machine tool |
| EP3756826A1 (en) | 2019-06-27 | 2020-12-30 | Hilti Aktiengesellschaft | Machine tool and method for operating a machine tool |
| DE102019121121A1 (en) * | 2019-08-05 | 2021-02-11 | Aesculap Ag | Medical drive unit of the handheld design with sensor device and kick-back control |
| US11673240B2 (en) | 2019-08-06 | 2023-06-13 | Makita Corporation | Driver-drill |
| US11529180B2 (en) | 2019-08-16 | 2022-12-20 | Mcginley Engineered Solutions, Llc | Reversible pin driver |
| US11446747B2 (en) * | 2019-10-29 | 2022-09-20 | Hilti Aktiengesellschaft | Systems and methods for calculating usage of power tools with a sensor tag |
| CA3157940A1 (en) * | 2019-11-18 | 2021-05-27 | Koon For Chung | Digging apparatus with safety mechanism |
| EP3854556B1 (en) * | 2020-01-22 | 2024-03-06 | Andreas Stihl AG & Co. KG | Handheld processing device and method for operating same |
| CN113561113B (en) * | 2020-04-28 | 2022-09-20 | 南京泉峰科技有限公司 | Intelligent electric tool and control method thereof |
| US12445081B2 (en) | 2020-07-15 | 2025-10-14 | Koki Holdings Co., Ltd. | Working tool and drilling method |
| US12266918B2 (en) | 2022-09-20 | 2025-04-01 | Black & Decker Inc. | Constant-clutch operation at power tool start-up |
| DE102020212046B4 (en) * | 2020-09-24 | 2023-06-22 | BSH Hausgeräte GmbH | Control of a pneumatic processing device |
| CN112757205B (en) * | 2021-01-05 | 2022-11-11 | 中国第一汽车股份有限公司 | Torque gun control method for avoiding beating hands |
| CN116867626B (en) * | 2021-02-19 | 2026-01-27 | 费斯托工具有限责任公司 | Hand-held power tool with kickback detection and method of detecting kickback condition of hand-held power tool |
| WO2022221050A1 (en) * | 2021-04-16 | 2022-10-20 | Black & Decker Inc. | Electrostatic clutch for power tool |
| DE102021121777B4 (en) * | 2021-08-23 | 2024-07-11 | Metabowerke Gmbh | Method for operating a drywall screwdriver, computer program and drywall screwdriver |
| SE544504C2 (en) * | 2021-09-17 | 2022-06-21 | Atlas Copco Ind Technique Ab | A power tool and a method of determining torque |
| EP4289553A1 (en) * | 2022-06-07 | 2023-12-13 | Hilti Aktiengesellschaft | Electric power tool with rotating tool |
| EP4353418B1 (en) * | 2022-10-14 | 2026-03-18 | Matatakitoyo Tool Co., Ltd. | Torque sensing arrangement of power tool |
| US12491619B2 (en) * | 2023-08-17 | 2025-12-09 | Stmicroelectronics International N.V. | Anti-kickback feature for power tools |
| GB2636104A (en) * | 2023-11-29 | 2025-06-11 | Black & Decker Inc | Power tool with a gyro sensor module for error condition detection |
| DE102024113931A1 (en) * | 2024-05-17 | 2025-11-20 | Metabowerke Gmbh | Hand mixer and method for operating a hand mixer |
Citations (269)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US1990035A (en) | 1931-07-27 | 1935-02-05 | Bosch Robert | Portable electrical tool |
| US2617971A (en) | 1950-12-04 | 1952-11-11 | Crane Packing Co | Overload control for motors |
| US2776653A (en) | 1954-06-17 | 1957-01-08 | Wayne H Eaton | Pneumatic drill jack |
| US3083508A (en) | 1962-05-09 | 1963-04-02 | Weller Tool Corp | Vibratory sanding tool |
| US3463990A (en) | 1966-11-28 | 1969-08-26 | Bernard A Ross | Pressure-sensitive electrical control device |
| US3554302A (en) | 1968-07-05 | 1971-01-12 | American Gas Ass | Directional control of earth boring apparatus |
| US3616864A (en) | 1969-11-28 | 1971-11-02 | Gardner Denver Co | Torque-controlled motor shutoff for power tool |
| GB1261479A (en) | 1969-10-07 | 1972-01-26 | Klaus Haken | Gravity compensated acceleration measuring apparatus |
| US3773117A (en) | 1971-03-31 | 1973-11-20 | Wilson T Inc | Reversible drive tool |
| US3847229A (en) | 1972-06-16 | 1974-11-12 | Bosch Gmbh Robert | Portable impact wrench |
| US3939920A (en) | 1974-09-19 | 1976-02-24 | Standard Pressed Steel Co. | Tightening method and system |
| DE2442260A1 (en) | 1974-09-04 | 1976-03-18 | Bosch Gmbh Robert | CRAFT MACHINE |
| US3963364A (en) | 1963-01-11 | 1976-06-15 | Lemelson Jerome H | Tool control system and method |
| US4060115A (en) | 1976-01-23 | 1977-11-29 | Jesus Bocanegra Marquina | Handle for hand tools to be rotated during operation |
| US4095547A (en) | 1975-05-01 | 1978-06-20 | Brown Brothers & Company, Ltd. | Acceleration measuring device |
| US4104778A (en) | 1977-01-27 | 1978-08-08 | Ingersoll-Rand Company | Method and apparatus for fastener tensioning |
| US4143467A (en) | 1978-05-01 | 1979-03-13 | Sperry Rand Corporation | Semi-automatic self-contained magnetic azimuth detector calibration apparatus and method |
| US4249117A (en) | 1979-05-01 | 1981-02-03 | Black And Decker, Inc. | Anti-kickback power tool control |
| US4262528A (en) | 1977-12-24 | 1981-04-21 | C. Plath Kg | Apparatus for measuring the torque applied to a wrench |
| US4267914A (en) | 1979-04-26 | 1981-05-19 | Black & Decker Inc. | Anti-kickback power tool control |
| US4305471A (en) | 1979-04-19 | 1981-12-15 | Rockwell International Corporation | Simplified fastening technique using the logarithmic rate method |
| DE3239847A1 (en) | 1981-10-27 | 1983-05-19 | Eaton Corp., 44114 Cleveland, Ohio | Speed control for a portable tool |
| US4418765A (en) | 1981-01-16 | 1983-12-06 | Matsushita Electric Industrial Company, Limited | Power-driven screwdriver with a torque control |
| US4426588A (en) | 1981-07-17 | 1984-01-17 | Hilti Aktiengesellschaft | Weighting circuit for an electrical torque signal in a drilling machine |
| US4448261A (en) | 1980-10-31 | 1984-05-15 | Hilti Aktiengesellschaft | Motorized hand tool for drilling |
| US4487270A (en) | 1981-11-24 | 1984-12-11 | Black & Decker Inc. | Electric tool, particularly a handtool, with torque control |
| US4510802A (en) | 1983-09-02 | 1985-04-16 | Sundstrand Data Control, Inc. | Angular rate sensor utilizing two vibrating accelerometers secured to a parallelogram linkage |
| USD279254S (en) | 1983-05-31 | 1985-06-18 | Fiskars Manufacturing Corporation | Hand grip for hand tools |
| DE3400124A1 (en) | 1984-01-04 | 1985-07-18 | Claus 4300 Essen Radebold | Magnetic screwdriving and insertion system with manipulation which can be rendered automatic |
| JPS60252213A (en) | 1984-05-28 | 1985-12-12 | Tokyo Keiki Co Ltd | Inclined angle measuring instrument |
| US4573556A (en) | 1983-05-20 | 1986-03-04 | Aktiebolaget Electrolux | Actuator for the release of an automatic emergency brake of a hand-operated powered tool |
| US4576270A (en) | 1983-02-28 | 1986-03-18 | The Aro Corporation | Torque control and fluid shutoff mechanism for a fluid operated tool |
| US4587468A (en) | 1984-01-25 | 1986-05-06 | Kabushiki Kaisha Morita Seisakusho | Sudden stop circuit for a brushless micromotor |
| US4601206A (en) | 1983-09-16 | 1986-07-22 | Ferranti Plc | Accelerometer system |
| US4628233A (en) | 1984-03-23 | 1986-12-09 | Black & Decker Inc. | Microprocessor based motor control |
| US4638870A (en) | 1983-12-21 | 1987-01-27 | Hilti Aktiengesellschaft | Motor driven hand-held device containing a displacement mass |
| US4648282A (en) | 1984-05-15 | 1987-03-10 | Cooper Industries | Power screwdriver |
| US4732221A (en) | 1987-01-21 | 1988-03-22 | Stewart-Warner Corporation | Pneumatic chipping hammer and method of manufacture |
| US4744248A (en) | 1985-07-25 | 1988-05-17 | Litton Systems, Inc. | Vibrating accelerometer-multisensor |
| US4754669A (en) | 1985-10-24 | 1988-07-05 | Black & Decker Inc. | Motor driven screwdriver with spindle lock |
| US4759225A (en) | 1987-06-01 | 1988-07-26 | Ryeson Corporation | Torque tool and torque tool analyzer |
| WO1988006508A3 (en) | 1987-03-05 | 1988-09-22 | Bosch Gmbh Robert | Process for interrupting the operation of a hand tool, in particular percussion and/or rotation thereof |
| US4793226A (en) | 1986-03-04 | 1988-12-27 | Willy Kress | Manual device for driving screws |
| US4820962A (en) | 1986-10-31 | 1989-04-11 | Hilti Aktiengesellschaft | Arrangement for automatic working data set-up for driving implements |
| US4841773A (en) | 1987-05-01 | 1989-06-27 | Litton Systems, Inc. | Miniature inertial measurement unit |
| US4846027A (en) | 1988-08-19 | 1989-07-11 | Taiwan Silver Star Industrial Co., Ltd. | Screwdriver |
| US4871033A (en) | 1988-01-30 | 1989-10-03 | Hilti Aktiengesellschaft | Motor-driven hand tool with braking torque device |
| US4878404A (en) | 1988-09-14 | 1989-11-07 | Liao Hsieh Yuan | Electric screwdriver |
| US4885511A (en) | 1986-04-11 | 1989-12-05 | Hilti Aktiengesellschaft | Drive control with overload protection for a drill device |
| EP0199883B1 (en) | 1985-03-29 | 1990-08-08 | HILTI Aktiengesellschaft | Motor-driven hand tool |
| US4948164A (en) | 1988-01-29 | 1990-08-14 | Nissan Motor Company, Limited | Actively controlled suspension system with compensation of delay in phase in control system |
| US4961035A (en) | 1988-02-04 | 1990-10-02 | Hitachi, Ltd. | Rotational angle control of screw tightening |
| USRE33379E (en) | 1984-03-23 | 1990-10-09 | Black & Decker Inc. | Microprocessor based motor control |
| US4996877A (en) | 1989-02-24 | 1991-03-05 | Litton Systems, Inc. | Three axis inertial measurement unit with counterbalanced mechanical oscillator |
| US5014793A (en) | 1989-04-10 | 1991-05-14 | Measurement Specialties, Inc. | Variable speed DC motor controller apparatus particularly adapted for control of portable-power tools |
| DE3938787A1 (en) | 1989-11-23 | 1991-05-29 | Gardner Denver Gmbh | Electric screwdriver with torque-monitoring and braking circuits - has strain-guage torque meter providing continuous braking signal during rapid deceleration of motor |
| US5036925A (en) | 1988-09-01 | 1991-08-06 | Black & Decker Inc. | Rotary hammer with variable hammering stroke |
| USD326043S (en) | 1989-05-19 | 1992-05-12 | Hitachi Koki Company, Limited | Electric screw driver |
| US5149998A (en) | 1991-08-23 | 1992-09-22 | Eaton Corporation | Eddy current drive dynamic braking system for heat reduction |
| US5155421A (en) | 1989-06-12 | 1992-10-13 | Atlas Copco Tools Ab | Power wrench for tightening screw joints |
| US5156221A (en) | 1990-06-22 | 1992-10-20 | Ceka Elektrowerkzeuge Ag & Co. Kg | Method of and arrangement for controlling the operation of a hand-held electrical device |
| JPH0465677B2 (en) | 1986-07-11 | 1992-10-20 | Shin Nihon Kagaku Kogyo Kk | |
| US5166882A (en) | 1989-03-31 | 1992-11-24 | The United States Of America As Represented By The Secretary Of The Navy | System for calibrating a gyro navigator |
| US5174045A (en) | 1991-05-17 | 1992-12-29 | Semitool, Inc. | Semiconductor processor with extendible receiver for handling multiple discrete wafers without wafer carriers |
| US5200661A (en) | 1989-12-15 | 1993-04-06 | Shramo Daniel J | Slotless, brushless, large air gap electric motor |
| US5201373A (en) | 1991-01-05 | 1993-04-13 | Robert Bosch Gmbh | Hand held power tool with safety coupling |
| US5212862A (en) | 1990-10-09 | 1993-05-25 | Allen-Bradley Company, Inc. | Torque-angle window control for threaded fasteners |
| DE4243317A1 (en) | 1992-12-21 | 1993-06-09 | Edgar Von Dipl.-Ing. 6602 Dudweiler De Hinueber | Angle control method for automatic screwdriver - using inertial angular rate sensor built into rotating shaft of insertion tool, and e.g. Sagnac effect rotation pick=up |
| US5232328A (en) | 1991-03-05 | 1993-08-03 | Semitool, Inc. | Robot loadable centrifugal semiconductor processor with extendible rotor |
| DE4204420A1 (en) | 1992-02-14 | 1993-08-19 | Fein C & E | Battery-driven hand tool e.g. electric screwdriver - has separate battery pack and state-of-charge indicator plugging into rear of tool housing, forming rechargeable unit |
| US5241861A (en) | 1991-02-08 | 1993-09-07 | Sundstrand Corporation | Micromachined rate and acceleration sensor |
| USD339279S (en) | 1992-01-08 | 1993-09-14 | Willi Hahn Gmbh & Co. Kg | Handle for a screwdriver |
| US5247466A (en) | 1990-03-29 | 1993-09-21 | Hitachi, Ltd. | Angular rate detection apparatus, acceleration detection apparatus and movement control apparatus, of moving body |
| US5245747A (en) | 1989-09-22 | 1993-09-21 | Atlas Copco Tools Ab | Device for tightening threaded joints |
| EP0345655B1 (en) | 1988-06-04 | 1994-03-23 | Robert Bosch Gmbh | Safety circuit for an electric hand tool |
| US5311069A (en) | 1991-09-06 | 1994-05-10 | Silicon Systems, Inc. | Driver circuitry for commutated inductive loads |
| US5345382A (en) | 1992-05-15 | 1994-09-06 | Zexel Corporation | Calibration method for a relative heading sensor |
| US5357179A (en) | 1992-06-19 | 1994-10-18 | Pace, Incorporated | Handheld low voltage machining tool |
| US5361022A (en) | 1993-03-23 | 1994-11-01 | E. F. Bavis & Associates, Inc. | Method and apparatus for electrical dynamic braking |
| US5365155A (en) | 1990-10-22 | 1994-11-15 | Marquardt Gmbh | Rotational speed control and use of same to control the rotational speed of an electric hand tool motor |
| US5383363A (en) | 1993-02-10 | 1995-01-24 | Ford Motor Company | Inertial measurement unit providing linear and angular outputs using only fixed linear accelerometer sensors |
| US5401124A (en) | 1991-04-12 | 1995-03-28 | Robert Bosch Gmbh | Hand-held power tool with jamming-detection sensor |
| US5418422A (en) | 1992-05-06 | 1995-05-23 | U.S. Philips Corporation | Combination of display tube and deflection unit comprising line deflection coils of the semi-saddle type with a gun-sided extension |
| US5440218A (en) | 1994-07-13 | 1995-08-08 | General Electric Company | Reversible switched reluctance motor operating without a shaft position sensor |
| JPH07270444A (en) | 1994-03-31 | 1995-10-20 | Matsushita Electric Ind Co Ltd | Angular velocity sensor |
| US5476014A (en) | 1992-12-21 | 1995-12-19 | Mercedes-Benz Ag | Process and a device for the rotation-angle-monitored tightening or loosening of screw connections |
| US5484026A (en) | 1993-09-03 | 1996-01-16 | Nikon Corporation | Handheld electromotive tool with sensor |
| US5493909A (en) | 1991-01-30 | 1996-02-27 | Mitsubishi Denki Kabushiki Kaisha | Method of and an apparatus for detecting control information |
| JPH08128825A (en) | 1994-11-02 | 1996-05-21 | Tamagawa Seiki Co Ltd | Inclination angle detection method and inclinometer |
| US5535306A (en) | 1993-01-28 | 1996-07-09 | Applied Materials Inc. | Self-calibration system for robot mechanisms |
| US5538089A (en) | 1995-06-05 | 1996-07-23 | The Black & Decker Corporation | Power tool clutch assembly |
| US5557990A (en) | 1995-07-27 | 1996-09-24 | Shin; Fu-Zong | Actuating device for use in powered screwdriver |
| US5563482A (en) | 1993-09-30 | 1996-10-08 | Black & Decker Inc. | Power tools |
| US5584619A (en) | 1993-12-28 | 1996-12-17 | Hilti Aktiengesellschaft | Method of and arrangement for preventing accidents during operation of a manually-operated machine tool with a rotatable toolbit |
| US5589644A (en) | 1994-12-01 | 1996-12-31 | Snap-On Technologies, Inc. | Torque-angle wrench |
| JPH0938815A (en) | 1995-07-31 | 1997-02-10 | Ntn Corp | Load detecting spindle unit |
| DE4334933C2 (en) | 1993-10-13 | 1997-02-20 | Fraunhofer Ges Forschung | Method and device for forcibly switching off hand-held tools |
| US5615130A (en) | 1994-12-14 | 1997-03-25 | Dallas Semiconductor Corp. | Systems and methods to gather, store and transfer information from electro/mechanical tools and instruments |
| USD378727S (en) | 1995-07-25 | 1997-04-08 | Ryobi North America | Rotary tool |
| US5619085A (en) | 1989-12-15 | 1997-04-08 | Shramo; Daniel J. | Slotless, brushless, large air-gap electric motor |
| US5635638A (en) | 1995-06-06 | 1997-06-03 | Analog Devices, Inc. | Coupling for multiple masses in a micromachined device |
| US5637968A (en) | 1993-10-25 | 1997-06-10 | The Stanley Works | Power tool with automatic downshift feature |
| DE19620124C1 (en) | 1996-05-18 | 1997-07-31 | Norbert Gerlach | Rotation angle measuring device for hand-guided screwdriver about axis of screwing motion |
| USD387964S (en) | 1995-10-02 | 1997-12-23 | Meccano, S.A. | Screwdriver |
| US5701961A (en) | 1996-07-05 | 1997-12-30 | Ingersoll-Rand Company | Electronic push to start nutrunner |
| US5704435A (en) | 1995-08-17 | 1998-01-06 | Milwaukee Electric Tool Corporation | Hand held power tool including inertia switch |
| GB2306356B (en) | 1995-11-02 | 1998-01-14 | Bosch Gmbh Robert | Hand machine tool |
| DE19632363C1 (en) | 1996-08-10 | 1998-01-15 | Telefunken Microelectron | Method of detecting angular acceleration of motor vehicles |
| RU2103156C1 (en) | 1993-02-08 | 1998-01-27 | Малое предприятие "Мехсборка" | Method for assembly of threaded joint |
| US5714698A (en) | 1994-02-03 | 1998-02-03 | Canon Kabushiki Kaisha | Gesture input method and apparatus |
| USD392535S (en) | 1997-05-15 | 1998-03-24 | Maxtech Manufacturing Inc. | Tool handle |
| USD392532S (en) | 1996-11-27 | 1998-03-24 | Hsuan-Sen Shiao | Driving assembly of a screwdriver |
| US5730232A (en) | 1996-04-10 | 1998-03-24 | Mixer; John E. | Two-speed fastener driver |
| US5754019A (en) | 1995-03-24 | 1998-05-19 | Marquardt Gmbh | Method and circuit arrangement for operating an electric motor |
| DE19651124C1 (en) | 1996-12-09 | 1998-05-28 | Siemens Ag | Automobile lateral pitching detection arrangement |
| JPH10156739A (en) | 1996-12-03 | 1998-06-16 | Kanyuki Tomidokoro | Screw driver of type convertible between power-assisted rotation and high-speed rotation |
| US5793168A (en) | 1996-08-23 | 1998-08-11 | Micro Linear Corporation | Active deceleration circuit for a brushless DC motor |
| US5795988A (en) | 1996-07-01 | 1998-08-18 | Alliedsignal Inc. | Gyroscope noise reduction and drift compensation |
| DE19726006A1 (en) | 1997-06-19 | 1998-09-10 | Bosch Gmbh Robert | Rotation sensor for motor vehicles, etc. |
| US5806401A (en) | 1994-01-04 | 1998-09-15 | Rajala; Edward | Satellite sawmill with adjustable saws and automatic sawbolt centering device |
| US5812420A (en) | 1995-09-05 | 1998-09-22 | Nikon Corporation | Vibration-preventive apparatus and exposure apparatus |
| US5831402A (en) | 1996-03-15 | 1998-11-03 | Yang; Tai-Her | Double direction actuating type tool of loose forward and loose backward assisting style |
| US5879111A (en) | 1996-11-11 | 1999-03-09 | Hilti Aktiengesellschaft | Hand-held device |
| US5914882A (en) | 1996-10-09 | 1999-06-22 | Hilti Aktiengesellschaft | Device for and method of preventing accidents in hand-operated machine tools due to tool jamming |
| US5954457A (en) | 1996-11-11 | 1999-09-21 | Hilti Aktiengesellschaft | Hand-held device |
| US5971091A (en) | 1993-02-24 | 1999-10-26 | Deka Products Limited Partnership | Transportation vehicles and methods |
| US5981557A (en) | 1995-05-18 | 1999-11-09 | Zeria Pharmaceutical Co., Ltd. | Aminothiazole derivative, medicament containing the same, and intermediate for preparation of said compound |
| US6005489A (en) | 1994-08-18 | 1999-12-21 | Atlas Copco Tools Ab | Electric power tool with code receiver |
| EP0773854B1 (en) | 1994-08-03 | 2000-01-26 | Robert Bosch Gmbh | Power screwdriver and process for tightening screws |
| US6044918A (en) | 1995-09-20 | 2000-04-04 | Hilti Aktiengesellschaft | Percussion blow added manually operable drilling tool |
| US6049460A (en) | 1999-07-19 | 2000-04-11 | Eaton Corporation | Trigger actuated control having supplemental heat sink |
| US6055142A (en) | 1997-04-23 | 2000-04-25 | Hilti Aktiengesellschaft | Manually guided machine tool with a safety device |
| US6058815A (en) | 1995-12-22 | 2000-05-09 | Habermehl; G. Lyle | Hand held power tool |
| US6062939A (en) | 1998-08-07 | 2000-05-16 | Mattel, Inc. | Toy power tool |
| DE19900882A1 (en) | 1999-01-12 | 2000-07-13 | Bosch Gmbh Robert | Hand-held machine tool, especially drill or angle grinder, has locking and blocking elements brought into engagement axially in direction of blocking element rotation axis in uncontrolled state |
| US6111515A (en) | 1998-12-10 | 2000-08-29 | Hilti Aktiengesellschaft | Method of and apparatus for preventing accidents during working with hand-held tools with a rotatable working tool |
| US6129699A (en) | 1997-10-31 | 2000-10-10 | Sorenson Development, Inc. | Portable persistaltic pump for peritoneal dialysis |
| US6138629A (en) | 1995-08-31 | 2000-10-31 | Isad Electronic Systems Gmbh & Co. Kg | System for actively reducing radial vibrations in a rotating shaft, and method of operating the system to achieve this |
| US6147626A (en) | 1998-08-11 | 2000-11-14 | Visteon Technologies, Llc | Determination of zero-angular-velocity output level for angular velocity sensor |
| US6158929A (en) | 1998-07-01 | 2000-12-12 | Bae Systems Plc | Electronically triggered surface sensor unit |
| US6161629A (en) | 1996-11-19 | 2000-12-19 | Hohmann; Joerg | Power wrench |
| US6209394B1 (en) | 1997-10-23 | 2001-04-03 | Stmicroelectronics S.R.L. | Integrated angular speed sensor device and production method thereof |
| US6236177B1 (en) | 1998-06-05 | 2001-05-22 | Milwaukee Electric Tool Corporation | Braking and control circuit for electric power tools |
| US20010042630A1 (en) | 2000-05-02 | 2001-11-22 | Ferdinand Kristen | Rotating electric hand tool implement with safety routine |
| US20020033267A1 (en) | 2000-09-16 | 2002-03-21 | Edwin Schweizer | Electrical hand-held power tool with a torque control |
| US20020053892A1 (en) | 2000-08-24 | 2002-05-09 | Roland Schaer | Microcontroller for and a method of controlling operation of the safety clutch of a hand-held electric power tool |
| US20020066632A1 (en) | 2000-12-01 | 2002-06-06 | Ferdinand Kristen | Safety clutch for electrical hand-held tool |
| US6408252B1 (en) | 1997-08-01 | 2002-06-18 | Dynalog, Inc. | Calibration system and displacement measurement device |
| DE10117121A1 (en) | 2001-04-06 | 2002-10-17 | Bosch Gmbh Robert | Hand tool |
| US6479958B1 (en) | 1995-01-06 | 2002-11-12 | Black & Decker Inc. | Anti-kickback and breakthrough torque control for power tool |
| US20020170754A1 (en) | 1993-02-24 | 2002-11-21 | Heinzmann Richard K. | Controlled balancing toy |
| US20030000651A1 (en) | 2001-03-23 | 2003-01-02 | Genser Hans Georg | Rotating evaporator with process-dependent rotating speed regulation |
| US6516896B1 (en) | 2001-07-30 | 2003-02-11 | The Stanley Works | Torque-applying tool and control therefor |
| US20030037423A1 (en) | 2001-08-24 | 2003-02-27 | Siegel Robert P. | Intelligent power tool |
| US20030042859A1 (en) | 2001-08-06 | 2003-03-06 | Gorti Bhanuprasad V. | Excitation circuit and control method for flux switching motor |
| US6567068B2 (en) | 1996-08-05 | 2003-05-20 | Sony Corporation | Information processing device and method |
| US6581714B1 (en) | 1993-02-24 | 2003-06-24 | Deka Products Limited Partnership | Steering control of a personal transporter |
| US6612034B2 (en) | 2000-01-24 | 2003-09-02 | Koninklijke Philips Electronics N.V. | Hand-held electrical appliance for personal care or for use as a tool |
| US20030196824A1 (en) | 1999-04-29 | 2003-10-23 | Gass Stephen F. | Power tools |
| US6640733B2 (en) | 1999-12-08 | 2003-11-04 | Edward H. Huffmeyer | Inclinometer-controlled apparatus for varying the rate of seed population |
| US20040011632A1 (en) | 2000-10-19 | 2004-01-22 | Peter Hellmann | Safety switch device for a rotary powered hand tool |
| USD485737S1 (en) | 2003-01-10 | 2004-01-27 | Toolovation, Llc | Battery powered screwdriver |
| WO2004024398A1 (en) | 2002-09-13 | 2004-03-25 | Black & Decker Inc | Rotary tool |
| US20040069511A1 (en) | 2002-07-03 | 2004-04-15 | David Spielmann | Hand-held power tool with a torque cut-off device |
| US20040104034A1 (en) | 2002-08-19 | 2004-06-03 | Claus Osselmann | Safety module for a multifunctional handheld tool |
| USD493888S1 (en) | 2003-02-04 | 2004-08-03 | Sherwood Services Ag | Electrosurgical pencil with pistol grip |
| US6779952B2 (en) | 2001-09-20 | 2004-08-24 | Weidong Zhang | Stepless speed change bench drill |
| USD494829S1 (en) | 2003-05-19 | 2004-08-24 | Jack Lin | Handle for screwdriver |
| US20040182175A1 (en) | 2003-03-19 | 2004-09-23 | The Boeing Company | Tool and associated methods for controllably applying torque to a fastener |
| US6796921B1 (en) | 2003-05-30 | 2004-09-28 | One World Technologies Limited | Three speed rotary power tool |
| US20040211573A1 (en) | 2003-04-24 | 2004-10-28 | Carrier David A. | Safety mechanism for a rotary hammer |
| EP0771619B2 (en) | 1995-11-02 | 2004-11-10 | Robert Bosch Gmbh | Process for interrupting the operation of a hand tool and hand tool therefore |
| US20040226728A1 (en) | 2003-03-01 | 2004-11-18 | Hans Boeni | Process for controlling an axially hammering and rotating electric hand-held machine tool |
| US20040226424A1 (en) | 2001-07-11 | 2004-11-18 | O'banion Michael | Power tool safety mechanisms |
| US6836614B2 (en) | 1993-07-06 | 2004-12-28 | Black & Decker Inc. | Electrical power tool having a motor control circuit for providing control over the torque output of the power tool |
| US20050000998A1 (en) | 2003-01-27 | 2005-01-06 | Mario Grazioli | Hand-held working tool |
| US6842991B2 (en) | 2002-07-31 | 2005-01-18 | Robert W. Levi | Gyro aided magnetic compass |
| US6871128B2 (en) | 2001-04-19 | 2005-03-22 | Kawasaki Jukogyo Kabushiki Kaisha | Speed change control method and speed change controller |
| DE10340710A1 (en) | 2003-09-04 | 2005-03-31 | Saltus-Werk Max Forst Gmbh | An electronic torque wrench has gyroscopic angle measurement and lighting indication |
| US20050095061A1 (en) | 2002-03-08 | 2005-05-05 | Nippon Kayaku Kabushiki-Kasha | Laser welded tube fitting structure and gas generator with the tube structure |
| JP2005144625A (en) | 2003-11-18 | 2005-06-09 | Mazda Motor Corp | Handheld power tool control device |
| US6910540B2 (en) | 2001-04-25 | 2005-06-28 | Katsuyuki Totsu | Torque control system for electrically driven rotating tools |
| GB2400811B (en) | 2003-04-25 | 2005-07-06 | Bosch Gmbh Robert | Drilling appliance with automatic position detection |
| US6923268B2 (en) | 2001-02-28 | 2005-08-02 | Katsuyuki Totsu | Electric rotational tool driving switch system |
| US20050217874A1 (en) | 2004-04-02 | 2005-10-06 | Michael Forster | Method for operating a power driver |
| WO2005095061A1 (en) | 2004-04-01 | 2005-10-13 | Atlas Copco Tools Ab | Method for determining the angular movement of the output shaft of an impulse nut runner at tightening a screw joint |
| US6965835B2 (en) | 2001-09-28 | 2005-11-15 | Spx Corporation | Torque angle sensing system and method with angle indication |
| US6968908B2 (en) | 2003-02-05 | 2005-11-29 | Makita Corporation | Power tools |
| USD513160S1 (en) | 2004-09-17 | 2005-12-27 | The Faucet-Queens Inc. | Cordless drill |
| US6983506B1 (en) | 2001-11-20 | 2006-01-10 | Coffee Brown | Universal, interchangeable tool attachment system |
| USD517634S1 (en) | 2004-09-22 | 2006-03-21 | Taylor Made Golf Company, Inc. | Golf club wrench |
| US20060081386A1 (en) | 2004-10-20 | 2006-04-20 | Qiang Zhang | Power tool anti-kickback system with rotational rate sensor |
| US20060081368A1 (en) | 2004-10-19 | 2006-04-20 | Halliburton Energy Services, Inc. | Tubing injector for variable diameter tubing |
| US20060103733A1 (en) | 2004-11-18 | 2006-05-18 | International Business Machines Corporation | Changing a function of a device based on tilt of the device for longer than a time period |
| US7055622B2 (en) | 2001-11-20 | 2006-06-06 | Black & Decker Inc. | Power tool having a handle and a pivotal tool body |
| EP1670134A1 (en) | 2004-12-09 | 2006-06-14 | Ferm B.V. | Apparatus and method for controlling a motor |
| US7090030B2 (en) | 2002-09-03 | 2006-08-15 | Microtorq L.L.C. | Tranducerized torque wrench |
| US7121598B2 (en) | 2003-06-05 | 2006-10-17 | Societe De Prospection Et D'inventions Techniques Spit | Pole for remote operation of a hand tool |
| US20060243469A1 (en) | 2003-06-11 | 2006-11-02 | Webster Craig D | Handwheel-operated device |
| US7134364B2 (en) | 2003-09-29 | 2006-11-14 | Robert Bosch Gmbh | Battery-driven screwdriver |
| US7154406B1 (en) | 2000-08-10 | 2006-12-26 | Black & Decker Inc. | Power tool level indicator |
| USD534651S1 (en) | 2004-04-01 | 2007-01-02 | Kinamed, Inc. | Powered surgical screwdriver |
| US7182148B1 (en) | 2004-08-11 | 2007-02-27 | William Szieff | Tool with motion and orientation indicators |
| US20070068480A1 (en) | 2004-01-28 | 2007-03-29 | Juergen Wiker | Method for switching off a power tool |
| US7197961B2 (en) | 2003-09-29 | 2007-04-03 | Robert Bosch Gmbh | Battery-driven screwdriver with a two-part motor housing and a separate, flanged gear unit |
| US20070084613A1 (en) | 2004-10-20 | 2007-04-19 | Qiang Zhang | Power tool anti-kickback system with rotational rate sensor |
| US20070095634A1 (en) | 2003-11-28 | 2007-05-03 | Valeo Thermal Systems Japan Corporation | Rotary switch mechanism |
| US7225884B2 (en) | 2004-10-26 | 2007-06-05 | Robert Bosch Gmbh | Hand power tool, in particular drilling screwdriver |
| US7234536B2 (en) | 2004-08-04 | 2007-06-26 | C. & E. Fein Gmbh | Power screwdriver |
| US20070144270A1 (en) | 2005-11-28 | 2007-06-28 | Crass Matthew M | Torque-angle instrument |
| DE102006016441A1 (en) | 2006-04-07 | 2007-10-11 | Robert Bosch Gmbh | Electric machine tool operating method, involves driving electric machine tool by electric motor, where connection of battery unit is made to energize motor that is interrupted upon identification of blocking case |
| GB2420843B (en) | 2004-12-03 | 2007-10-24 | Bosch Gmbh Robert | Hand machine tool |
| US20070256914A1 (en) | 2004-08-09 | 2007-11-08 | Guenter Lohr | Cordless Screwdriver |
| US20070281274A1 (en) | 2006-06-05 | 2007-12-06 | Allan Schraffran | Dental wrench and method of use thereof |
| EP1878541A2 (en) | 2006-07-13 | 2008-01-16 | Black & Decker, Inc. | Control Scheme for Detecting and Preventing Torque Conditions in a Power Tool |
| US7331406B2 (en) | 2004-06-21 | 2008-02-19 | Duraspin Products Llc | Apparatus for controlling a fastener driving tool, with user-adjustable torque limiting control |
| US7347158B2 (en) | 2004-01-22 | 2008-03-25 | Graham Hawkes | Safety system for scuba divers operating underwater propulsion devices |
| USD565380S1 (en) | 2006-07-19 | 2008-04-01 | Rinner James A | Screwdriver T-handle |
| US7359816B2 (en) | 2005-05-25 | 2008-04-15 | Analog Devices, Inc. | Sensor calibration method and apparatus |
| US7400106B2 (en) | 2005-11-04 | 2008-07-15 | Robert Bosch Gmbh | Method and apparatus for providing torque limit feedback in a power drill |
| US20080276760A1 (en) | 2005-08-11 | 2008-11-13 | Jong Phil Kim | Driver |
| US7456603B2 (en) | 2005-07-19 | 2008-11-25 | Hitachi, Ltd. | Phase detection circuit, resolver/digital converter using the circuit, and control system using the converter |
| US7463952B2 (en) | 2004-10-13 | 2008-12-09 | Continental Automotive France | Method and device for processing measurement signals from a movement sensor on board a motor vehicle |
| US7469753B2 (en) | 2005-06-01 | 2008-12-30 | Milwaukee Electric Tool Corporation | Power tool, drive assembly, and method of operating the same |
| DE10309414B4 (en) | 2003-03-05 | 2009-01-08 | Robert Bosch Gmbh | Sensor device and associated method for a hand tool |
| JP4226869B2 (en) | 2002-10-03 | 2009-02-18 | 日本圧着端子製造株式会社 | Card connector |
| US20090051306A1 (en) | 2007-08-24 | 2009-02-26 | Makita Corporation | Electric power tool, control unit and recording medium |
| US20090065225A1 (en) | 2007-09-07 | 2009-03-12 | Black & Decker Inc. | Switchable anti-lock control |
| US7504791B2 (en) | 2004-01-22 | 2009-03-17 | Robert Bosch Gmbh | Electric power tool with optimized operating range |
| US20090078057A1 (en) | 2007-09-20 | 2009-03-26 | Asi Datamyte | Residual torque analyzer |
| DE102007048052A1 (en) | 2007-10-05 | 2009-04-09 | Daubner & Stommel GbR Bau-Werk-Planung (vertretungsberechtigter Gesellschafter: Matthias Stommel, 27777 Ganderkesee) | Motor-driven hand machine tool i.e. motor chain saw, operating method, involves eliminating and/or reducing working movements of cutting tool to safe measure depending on detected machine movements of hand machine tool |
| US7526398B1 (en) | 2005-09-21 | 2009-04-28 | Samsung Electronics Co., Ltd. | Method and apparatus for calibrating gyro-sensor |
| US20090139738A1 (en) | 2007-12-04 | 2009-06-04 | Peter Lippek | Screwing Tool And Method For Controlling The Tightening Angle Of Screwed Joints |
| US7546785B2 (en) | 2004-08-09 | 2009-06-16 | Robert Bosch Gmbh | Battery-operated screwdriver |
| US7551411B2 (en) | 2005-10-12 | 2009-06-23 | Black & Decker Inc. | Control and protection methodologies for a motor control module |
| DE102007062727A1 (en) | 2007-12-27 | 2009-07-02 | Robert Bosch Gmbh | Device and method for taking a safety measure in a power tool |
| DE102009007977A1 (en) | 2009-02-06 | 2009-07-23 | Konrad, Hilmar, Dipl.-Ing. | Angular deviation indicating method for e.g. drilling machine, involves comparing current detected rotation angle value continuously with reference valve, and indicating comparison result as measure of angle deviation |
| EP1524084B1 (en) | 2003-10-14 | 2009-08-19 | Panasonic Electric Works Co., Ltd. | Power impact tool |
| US20090211774A1 (en) | 2008-02-25 | 2009-08-27 | Dvells Jr Walter E | Attachment for stitching tool |
| WO2009136840A1 (en) | 2008-05-08 | 2009-11-12 | Atlas Copco Tools Ab | Method and device for tightening joints |
| US20090295313A1 (en) | 2008-05-30 | 2009-12-03 | Makita Corporation | Rechargeable power tool, control unit and recording medium |
| USD606827S1 (en) | 2009-06-18 | 2009-12-29 | 3M Innovative Properties Company | Small, portable power tool |
| US7642741B2 (en) | 2005-04-27 | 2010-01-05 | Sidman Adam D | Handheld platform stabilization system employing distributed rotation sensors |
| US7650699B2 (en) | 2005-07-22 | 2010-01-26 | Kazuhiro Yamamoto | Electric drill |
| US7682035B2 (en) | 2005-09-01 | 2010-03-23 | Robert Bosch Gmbh | Housing device for hand-held power tool |
| US7688028B2 (en) | 2004-10-18 | 2010-03-30 | Black & Decker Inc. | Cordless power system |
| US7689378B2 (en) | 2005-02-15 | 2010-03-30 | Magneto Inertial Sensing Technology, Inc. | Motion sensing apparatus, systems and techniques |
| USD613144S1 (en) | 2008-10-08 | 2010-04-06 | Fu-Hui Lin | Hand tool |
| EP1398119B1 (en) | 2002-09-11 | 2010-04-07 | Black & Decker Inc. | Safety cut-off for power tool with rotating tool bit |
| USD618527S1 (en) | 2010-03-22 | 2010-06-29 | IBT Holdings, Inc | T tool handle |
| US20100188245A1 (en) | 2008-10-02 | 2010-07-29 | Certusview Technologies, Llc | Locate apparatus having enhanced features for underground facility locate operations, and associated methods and systems |
| US20100189887A1 (en) | 2008-10-02 | 2010-07-29 | Certusview Technologies, Llc | Marking apparatus having enhanced features for underground facility marking operations, and associated methods and systems |
| US7774155B2 (en) | 2006-03-10 | 2010-08-10 | Nintendo Co., Ltd. | Accelerometer-based controller |
| DE102009001298A1 (en) | 2009-03-03 | 2010-09-16 | Hilti Aktiengesellschaft | self-tapping |
| GB2436959B (en) | 2006-04-07 | 2010-10-06 | Bosch Gmbh Robert | Electric machine tool and method for operating the latter |
| US20100256939A1 (en) | 2009-04-03 | 2010-10-07 | The Regents Of The University Of Michigan | Heading Error Removal System for Tracking Devices |
| US7832286B2 (en) | 2005-04-07 | 2010-11-16 | Kyoto Tool Co., Ltd. | Torque wrench |
| DE10348756B4 (en) | 2003-10-21 | 2011-01-05 | Zf Friedrichshafen Ag | Rotary hammer or drill with electromagnetic clutch and method for operating the electromagnetic clutch |
| US7882900B2 (en) | 2007-08-29 | 2011-02-08 | Positec Power Tools (Suzhou) Co., Ltd | Power tool with signal generator |
| US7900715B2 (en) | 2006-06-19 | 2011-03-08 | Positec Power Tools (Suzhou) Co., Ltd. | Variable speed tool and variable speed control method |
| US7912664B2 (en) | 2008-09-11 | 2011-03-22 | Northrop Grumman Guidance And Electronics Company, Inc. | Self calibrating gyroscope system |
| US7942084B2 (en) | 2006-12-06 | 2011-05-17 | American Power Tool Company | Powered driver and methods for reliable repeated securement of threaded connectors to a correct tightness |
| US20110153081A1 (en) | 2008-04-24 | 2011-06-23 | Nikolai Romanov | Robotic Floor Cleaning Apparatus with Shell Connected to the Cleaning Assembly and Suspended over the Drive System |
| US20110202175A1 (en) | 2008-04-24 | 2011-08-18 | Nikolai Romanov | Mobile robot for cleaning |
| US8025106B2 (en) | 2006-04-12 | 2011-09-27 | Robert Bosch Gmbh | Method for tightening a screw connection and screw driving tool |
| US20110301900A1 (en) | 2010-06-04 | 2011-12-08 | Apple Inc. | Gyro zero turn rate offset correction over temperature in a personal mobile device |
| US20120000682A1 (en) | 2010-07-01 | 2012-01-05 | Hilti Aktiengesellschaft | Hand-held power tool |
| US8136382B2 (en) | 2007-03-15 | 2012-03-20 | Northrop Grumman Guidance And Electronics Company, Inc. | Self-calibration of scale factor for dual resonator class II Coriolis vibratory gyros |
| US20120090863A1 (en) | 2010-01-07 | 2012-04-19 | Daniel Puzio | Screwdriving tool having a driving tool with a removable contact trip assembly |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5738177A (en) | 1995-07-28 | 1998-04-14 | Black & Decker Inc. | Production assembly tool |
| DE19628945A1 (en) * | 1995-11-02 | 1997-05-07 | Bosch Gmbh Robert | Process for interrupting the driving activity of a hand tool, and hand tool working according to this process |
| US20040226124A1 (en) | 2003-05-16 | 2004-11-18 | Silva Sandra S. | Multi-color faux art palette |
| DE102004003202B4 (en) * | 2004-01-22 | 2022-05-25 | Robert Bosch Gmbh | Handle with detection device |
| US7447565B2 (en) * | 2004-05-06 | 2008-11-04 | John Cerwin | Electronic alignment system |
-
2006
- 2006-09-12 US US11/519,427 patent/US7552781B2/en not_active Expired - Lifetime
-
2007
- 2007-09-11 WO PCT/US2007/019679 patent/WO2008033310A2/en not_active Ceased
- 2007-09-12 EP EP07116224.2A patent/EP1900484B1/en not_active Not-in-force
- 2007-09-12 EP EP15171213.0A patent/EP2949432B1/en not_active Not-in-force
- 2007-09-12 CN CNU2007201768184U patent/CN201152938Y/en not_active Expired - Fee Related
-
2008
- 2008-01-14 US US12/008,823 patent/US7681659B2/en not_active Expired - Lifetime
-
2012
- 2012-03-19 US US13/423,736 patent/USRE44311E1/en not_active Expired - Lifetime
- 2012-08-31 US US13/600,927 patent/USRE45112E1/en not_active Expired - Lifetime
- 2012-08-31 US US13/600,722 patent/USRE44993E1/en not_active Expired - Lifetime
Patent Citations (333)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US1990035A (en) | 1931-07-27 | 1935-02-05 | Bosch Robert | Portable electrical tool |
| US2617971A (en) | 1950-12-04 | 1952-11-11 | Crane Packing Co | Overload control for motors |
| US2776653A (en) | 1954-06-17 | 1957-01-08 | Wayne H Eaton | Pneumatic drill jack |
| US3083508A (en) | 1962-05-09 | 1963-04-02 | Weller Tool Corp | Vibratory sanding tool |
| US3963364A (en) | 1963-01-11 | 1976-06-15 | Lemelson Jerome H | Tool control system and method |
| US3463990A (en) | 1966-11-28 | 1969-08-26 | Bernard A Ross | Pressure-sensitive electrical control device |
| US3554302A (en) | 1968-07-05 | 1971-01-12 | American Gas Ass | Directional control of earth boring apparatus |
| GB1261479A (en) | 1969-10-07 | 1972-01-26 | Klaus Haken | Gravity compensated acceleration measuring apparatus |
| US3616864A (en) | 1969-11-28 | 1971-11-02 | Gardner Denver Co | Torque-controlled motor shutoff for power tool |
| US3773117A (en) | 1971-03-31 | 1973-11-20 | Wilson T Inc | Reversible drive tool |
| US3847229A (en) | 1972-06-16 | 1974-11-12 | Bosch Gmbh Robert | Portable impact wrench |
| DE2442260A1 (en) | 1974-09-04 | 1976-03-18 | Bosch Gmbh Robert | CRAFT MACHINE |
| US4066133A (en) | 1974-09-04 | 1978-01-03 | Robert Bosch G.M.B.H. | Power hand tool |
| US3939920A (en) | 1974-09-19 | 1976-02-24 | Standard Pressed Steel Co. | Tightening method and system |
| US4095547A (en) | 1975-05-01 | 1978-06-20 | Brown Brothers & Company, Ltd. | Acceleration measuring device |
| US4060115A (en) | 1976-01-23 | 1977-11-29 | Jesus Bocanegra Marquina | Handle for hand tools to be rotated during operation |
| US4104778A (en) | 1977-01-27 | 1978-08-08 | Ingersoll-Rand Company | Method and apparatus for fastener tensioning |
| US4262528A (en) | 1977-12-24 | 1981-04-21 | C. Plath Kg | Apparatus for measuring the torque applied to a wrench |
| US4143467A (en) | 1978-05-01 | 1979-03-13 | Sperry Rand Corporation | Semi-automatic self-contained magnetic azimuth detector calibration apparatus and method |
| US4305471A (en) | 1979-04-19 | 1981-12-15 | Rockwell International Corporation | Simplified fastening technique using the logarithmic rate method |
| US4267914A (en) | 1979-04-26 | 1981-05-19 | Black & Decker Inc. | Anti-kickback power tool control |
| EP0018603B1 (en) | 1979-04-26 | 1984-04-04 | Black & Decker Inc. | Anti-kickback power tool control |
| US4249117A (en) | 1979-05-01 | 1981-02-03 | Black And Decker, Inc. | Anti-kickback power tool control |
| US4448261A (en) | 1980-10-31 | 1984-05-15 | Hilti Aktiengesellschaft | Motorized hand tool for drilling |
| GB2086277B (en) | 1980-10-31 | 1985-01-09 | Hilti Ag | Motor-driven hand drill |
| US4418765A (en) | 1981-01-16 | 1983-12-06 | Matsushita Electric Industrial Company, Limited | Power-driven screwdriver with a torque control |
| US4426588A (en) | 1981-07-17 | 1984-01-17 | Hilti Aktiengesellschaft | Weighting circuit for an electrical torque signal in a drilling machine |
| DE3239847A1 (en) | 1981-10-27 | 1983-05-19 | Eaton Corp., 44114 Cleveland, Ohio | Speed control for a portable tool |
| US4487270A (en) | 1981-11-24 | 1984-12-11 | Black & Decker Inc. | Electric tool, particularly a handtool, with torque control |
| US4576270A (en) | 1983-02-28 | 1986-03-18 | The Aro Corporation | Torque control and fluid shutoff mechanism for a fluid operated tool |
| US4573556A (en) | 1983-05-20 | 1986-03-04 | Aktiebolaget Electrolux | Actuator for the release of an automatic emergency brake of a hand-operated powered tool |
| USD279254S (en) | 1983-05-31 | 1985-06-18 | Fiskars Manufacturing Corporation | Hand grip for hand tools |
| US4510802A (en) | 1983-09-02 | 1985-04-16 | Sundstrand Data Control, Inc. | Angular rate sensor utilizing two vibrating accelerometers secured to a parallelogram linkage |
| US4601206A (en) | 1983-09-16 | 1986-07-22 | Ferranti Plc | Accelerometer system |
| US4638870A (en) | 1983-12-21 | 1987-01-27 | Hilti Aktiengesellschaft | Motor driven hand-held device containing a displacement mass |
| DE3400124A1 (en) | 1984-01-04 | 1985-07-18 | Claus 4300 Essen Radebold | Magnetic screwdriving and insertion system with manipulation which can be rendered automatic |
| US4587468A (en) | 1984-01-25 | 1986-05-06 | Kabushiki Kaisha Morita Seisakusho | Sudden stop circuit for a brushless micromotor |
| US4628233A (en) | 1984-03-23 | 1986-12-09 | Black & Decker Inc. | Microprocessor based motor control |
| USRE33379E (en) | 1984-03-23 | 1990-10-09 | Black & Decker Inc. | Microprocessor based motor control |
| US4648282A (en) | 1984-05-15 | 1987-03-10 | Cooper Industries | Power screwdriver |
| JPS60252213A (en) | 1984-05-28 | 1985-12-12 | Tokyo Keiki Co Ltd | Inclined angle measuring instrument |
| EP0199883B1 (en) | 1985-03-29 | 1990-08-08 | HILTI Aktiengesellschaft | Motor-driven hand tool |
| US4744248A (en) | 1985-07-25 | 1988-05-17 | Litton Systems, Inc. | Vibrating accelerometer-multisensor |
| US4754669A (en) | 1985-10-24 | 1988-07-05 | Black & Decker Inc. | Motor driven screwdriver with spindle lock |
| US4793226A (en) | 1986-03-04 | 1988-12-27 | Willy Kress | Manual device for driving screws |
| US4885511A (en) | 1986-04-11 | 1989-12-05 | Hilti Aktiengesellschaft | Drive control with overload protection for a drill device |
| JPH0465677B2 (en) | 1986-07-11 | 1992-10-20 | Shin Nihon Kagaku Kogyo Kk | |
| US4820962A (en) | 1986-10-31 | 1989-04-11 | Hilti Aktiengesellschaft | Arrangement for automatic working data set-up for driving implements |
| US4732221A (en) | 1987-01-21 | 1988-03-22 | Stewart-Warner Corporation | Pneumatic chipping hammer and method of manufacture |
| WO1988006508A3 (en) | 1987-03-05 | 1988-09-22 | Bosch Gmbh Robert | Process for interrupting the operation of a hand tool, in particular percussion and/or rotation thereof |
| EP0303651B2 (en) | 1987-03-05 | 1999-12-01 | Robert Bosch Gmbh | Process for interrupting the operation of a hand tool, in particular percussion and/or rotation thereof |
| US4841773A (en) | 1987-05-01 | 1989-06-27 | Litton Systems, Inc. | Miniature inertial measurement unit |
| US4759225A (en) | 1987-06-01 | 1988-07-26 | Ryeson Corporation | Torque tool and torque tool analyzer |
| US4948164A (en) | 1988-01-29 | 1990-08-14 | Nissan Motor Company, Limited | Actively controlled suspension system with compensation of delay in phase in control system |
| US4871033A (en) | 1988-01-30 | 1989-10-03 | Hilti Aktiengesellschaft | Motor-driven hand tool with braking torque device |
| US4961035A (en) | 1988-02-04 | 1990-10-02 | Hitachi, Ltd. | Rotational angle control of screw tightening |
| EP0345655B1 (en) | 1988-06-04 | 1994-03-23 | Robert Bosch Gmbh | Safety circuit for an electric hand tool |
| US4846027A (en) | 1988-08-19 | 1989-07-11 | Taiwan Silver Star Industrial Co., Ltd. | Screwdriver |
| US5036925A (en) | 1988-09-01 | 1991-08-06 | Black & Decker Inc. | Rotary hammer with variable hammering stroke |
| US4878404A (en) | 1988-09-14 | 1989-11-07 | Liao Hsieh Yuan | Electric screwdriver |
| US4996877A (en) | 1989-02-24 | 1991-03-05 | Litton Systems, Inc. | Three axis inertial measurement unit with counterbalanced mechanical oscillator |
| US5166882A (en) | 1989-03-31 | 1992-11-24 | The United States Of America As Represented By The Secretary Of The Navy | System for calibrating a gyro navigator |
| US5014793A (en) | 1989-04-10 | 1991-05-14 | Measurement Specialties, Inc. | Variable speed DC motor controller apparatus particularly adapted for control of portable-power tools |
| USD326043S (en) | 1989-05-19 | 1992-05-12 | Hitachi Koki Company, Limited | Electric screw driver |
| US5155421A (en) | 1989-06-12 | 1992-10-13 | Atlas Copco Tools Ab | Power wrench for tightening screw joints |
| US5245747A (en) | 1989-09-22 | 1993-09-21 | Atlas Copco Tools Ab | Device for tightening threaded joints |
| DE3938787A1 (en) | 1989-11-23 | 1991-05-29 | Gardner Denver Gmbh | Electric screwdriver with torque-monitoring and braking circuits - has strain-guage torque meter providing continuous braking signal during rapid deceleration of motor |
| US5619085A (en) | 1989-12-15 | 1997-04-08 | Shramo; Daniel J. | Slotless, brushless, large air-gap electric motor |
| US5200661A (en) | 1989-12-15 | 1993-04-06 | Shramo Daniel J | Slotless, brushless, large air gap electric motor |
| US5425165A (en) | 1989-12-15 | 1995-06-20 | Shramo; Daniel J. | Method of making a slotless, brushless, large air-gap electric motor |
| US5247466A (en) | 1990-03-29 | 1993-09-21 | Hitachi, Ltd. | Angular rate detection apparatus, acceleration detection apparatus and movement control apparatus, of moving body |
| US5156221A (en) | 1990-06-22 | 1992-10-20 | Ceka Elektrowerkzeuge Ag & Co. Kg | Method of and arrangement for controlling the operation of a hand-held electrical device |
| US5284217A (en) | 1990-10-09 | 1994-02-08 | Allen-Bradley Company, Inc. | Apparatus for tightening threaded fasteners based upon a predetermined torque-angle specification window |
| US5212862A (en) | 1990-10-09 | 1993-05-25 | Allen-Bradley Company, Inc. | Torque-angle window control for threaded fasteners |
| US5365155A (en) | 1990-10-22 | 1994-11-15 | Marquardt Gmbh | Rotational speed control and use of same to control the rotational speed of an electric hand tool motor |
| US5201373A (en) | 1991-01-05 | 1993-04-13 | Robert Bosch Gmbh | Hand held power tool with safety coupling |
| US5493909A (en) | 1991-01-30 | 1996-02-27 | Mitsubishi Denki Kabushiki Kaisha | Method of and an apparatus for detecting control information |
| US5241861A (en) | 1991-02-08 | 1993-09-07 | Sundstrand Corporation | Micromachined rate and acceleration sensor |
| US5232328A (en) | 1991-03-05 | 1993-08-03 | Semitool, Inc. | Robot loadable centrifugal semiconductor processor with extendible rotor |
| US5401124A (en) | 1991-04-12 | 1995-03-28 | Robert Bosch Gmbh | Hand-held power tool with jamming-detection sensor |
| US5174045A (en) | 1991-05-17 | 1992-12-29 | Semitool, Inc. | Semiconductor processor with extendible receiver for handling multiple discrete wafers without wafer carriers |
| US5149998A (en) | 1991-08-23 | 1992-09-22 | Eaton Corporation | Eddy current drive dynamic braking system for heat reduction |
| US5311069A (en) | 1991-09-06 | 1994-05-10 | Silicon Systems, Inc. | Driver circuitry for commutated inductive loads |
| USD339279S (en) | 1992-01-08 | 1993-09-14 | Willi Hahn Gmbh & Co. Kg | Handle for a screwdriver |
| DE4204420A1 (en) | 1992-02-14 | 1993-08-19 | Fein C & E | Battery-driven hand tool e.g. electric screwdriver - has separate battery pack and state-of-charge indicator plugging into rear of tool housing, forming rechargeable unit |
| US5418422A (en) | 1992-05-06 | 1995-05-23 | U.S. Philips Corporation | Combination of display tube and deflection unit comprising line deflection coils of the semi-saddle type with a gun-sided extension |
| US5345382A (en) | 1992-05-15 | 1994-09-06 | Zexel Corporation | Calibration method for a relative heading sensor |
| US5357179A (en) | 1992-06-19 | 1994-10-18 | Pace, Incorporated | Handheld low voltage machining tool |
| US5476014A (en) | 1992-12-21 | 1995-12-19 | Mercedes-Benz Ag | Process and a device for the rotation-angle-monitored tightening or loosening of screw connections |
| DE4243317A1 (en) | 1992-12-21 | 1993-06-09 | Edgar Von Dipl.-Ing. 6602 Dudweiler De Hinueber | Angle control method for automatic screwdriver - using inertial angular rate sensor built into rotating shaft of insertion tool, and e.g. Sagnac effect rotation pick=up |
| US5535306A (en) | 1993-01-28 | 1996-07-09 | Applied Materials Inc. | Self-calibration system for robot mechanisms |
| RU2103156C1 (en) | 1993-02-08 | 1998-01-27 | Малое предприятие "Мехсборка" | Method for assembly of threaded joint |
| US5383363A (en) | 1993-02-10 | 1995-01-24 | Ford Motor Company | Inertial measurement unit providing linear and angular outputs using only fixed linear accelerometer sensors |
| US20020170754A1 (en) | 1993-02-24 | 2002-11-21 | Heinzmann Richard K. | Controlled balancing toy |
| US5971091A (en) | 1993-02-24 | 1999-10-26 | Deka Products Limited Partnership | Transportation vehicles and methods |
| US6581714B1 (en) | 1993-02-24 | 2003-06-24 | Deka Products Limited Partnership | Steering control of a personal transporter |
| US5361022A (en) | 1993-03-23 | 1994-11-01 | E. F. Bavis & Associates, Inc. | Method and apparatus for electrical dynamic braking |
| US6836614B2 (en) | 1993-07-06 | 2004-12-28 | Black & Decker Inc. | Electrical power tool having a motor control circuit for providing control over the torque output of the power tool |
| US5484026A (en) | 1993-09-03 | 1996-01-16 | Nikon Corporation | Handheld electromotive tool with sensor |
| US5563482A (en) | 1993-09-30 | 1996-10-08 | Black & Decker Inc. | Power tools |
| DE4334933C2 (en) | 1993-10-13 | 1997-02-20 | Fraunhofer Ges Forschung | Method and device for forcibly switching off hand-held tools |
| US5637968A (en) | 1993-10-25 | 1997-06-10 | The Stanley Works | Power tool with automatic downshift feature |
| US5584619A (en) | 1993-12-28 | 1996-12-17 | Hilti Aktiengesellschaft | Method of and arrangement for preventing accidents during operation of a manually-operated machine tool with a rotatable toolbit |
| EP0666148B1 (en) | 1993-12-28 | 1997-06-18 | HILTI Aktiengesellschaft | Method and apparatus for handheld machine tools to prevent accidents caused by blocking of the tool |
| US5806401A (en) | 1994-01-04 | 1998-09-15 | Rajala; Edward | Satellite sawmill with adjustable saws and automatic sawbolt centering device |
| US5714698A (en) | 1994-02-03 | 1998-02-03 | Canon Kabushiki Kaisha | Gesture input method and apparatus |
| JPH07270444A (en) | 1994-03-31 | 1995-10-20 | Matsushita Electric Ind Co Ltd | Angular velocity sensor |
| US5440218A (en) | 1994-07-13 | 1995-08-08 | General Electric Company | Reversible switched reluctance motor operating without a shaft position sensor |
| EP0773854B1 (en) | 1994-08-03 | 2000-01-26 | Robert Bosch Gmbh | Power screwdriver and process for tightening screws |
| US6005489A (en) | 1994-08-18 | 1999-12-21 | Atlas Copco Tools Ab | Electric power tool with code receiver |
| JPH08128825A (en) | 1994-11-02 | 1996-05-21 | Tamagawa Seiki Co Ltd | Inclination angle detection method and inclinometer |
| US5589644A (en) | 1994-12-01 | 1996-12-31 | Snap-On Technologies, Inc. | Torque-angle wrench |
| US5615130A (en) | 1994-12-14 | 1997-03-25 | Dallas Semiconductor Corp. | Systems and methods to gather, store and transfer information from electro/mechanical tools and instruments |
| US6479958B1 (en) | 1995-01-06 | 2002-11-12 | Black & Decker Inc. | Anti-kickback and breakthrough torque control for power tool |
| US5754019A (en) | 1995-03-24 | 1998-05-19 | Marquardt Gmbh | Method and circuit arrangement for operating an electric motor |
| US5981557A (en) | 1995-05-18 | 1999-11-09 | Zeria Pharmaceutical Co., Ltd. | Aminothiazole derivative, medicament containing the same, and intermediate for preparation of said compound |
| US5538089A (en) | 1995-06-05 | 1996-07-23 | The Black & Decker Corporation | Power tool clutch assembly |
| US5635638A (en) | 1995-06-06 | 1997-06-03 | Analog Devices, Inc. | Coupling for multiple masses in a micromachined device |
| USD378727S (en) | 1995-07-25 | 1997-04-08 | Ryobi North America | Rotary tool |
| US5557990A (en) | 1995-07-27 | 1996-09-24 | Shin; Fu-Zong | Actuating device for use in powered screwdriver |
| JPH0938815A (en) | 1995-07-31 | 1997-02-10 | Ntn Corp | Load detecting spindle unit |
| US5984020A (en) | 1995-08-17 | 1999-11-16 | Milwaukee Electric Tool Corporation | Power toll including inertia responsive element |
| US5704435A (en) | 1995-08-17 | 1998-01-06 | Milwaukee Electric Tool Corporation | Hand held power tool including inertia switch |
| US6138629A (en) | 1995-08-31 | 2000-10-31 | Isad Electronic Systems Gmbh & Co. Kg | System for actively reducing radial vibrations in a rotating shaft, and method of operating the system to achieve this |
| US5812420A (en) | 1995-09-05 | 1998-09-22 | Nikon Corporation | Vibration-preventive apparatus and exposure apparatus |
| US6044918A (en) | 1995-09-20 | 2000-04-04 | Hilti Aktiengesellschaft | Percussion blow added manually operable drilling tool |
| USD387964S (en) | 1995-10-02 | 1997-12-23 | Meccano, S.A. | Screwdriver |
| US5996707A (en) | 1995-11-02 | 1999-12-07 | Robert Bosch Gmbh | Hand power tool |
| DE19540718B4 (en) | 1995-11-02 | 2007-04-05 | Robert Bosch Gmbh | Hand tool with a triggerable by a detection device blocking device |
| EP0771619B2 (en) | 1995-11-02 | 2004-11-10 | Robert Bosch Gmbh | Process for interrupting the operation of a hand tool and hand tool therefore |
| GB2306356B (en) | 1995-11-02 | 1998-01-14 | Bosch Gmbh Robert | Hand machine tool |
| US6058815A (en) | 1995-12-22 | 2000-05-09 | Habermehl; G. Lyle | Hand held power tool |
| US5831402A (en) | 1996-03-15 | 1998-11-03 | Yang; Tai-Her | Double direction actuating type tool of loose forward and loose backward assisting style |
| US5730232A (en) | 1996-04-10 | 1998-03-24 | Mixer; John E. | Two-speed fastener driver |
| DE19620124C1 (en) | 1996-05-18 | 1997-07-31 | Norbert Gerlach | Rotation angle measuring device for hand-guided screwdriver about axis of screwing motion |
| US5795988A (en) | 1996-07-01 | 1998-08-18 | Alliedsignal Inc. | Gyroscope noise reduction and drift compensation |
| US5701961A (en) | 1996-07-05 | 1997-12-30 | Ingersoll-Rand Company | Electronic push to start nutrunner |
| US6567068B2 (en) | 1996-08-05 | 2003-05-20 | Sony Corporation | Information processing device and method |
| DE19632363C1 (en) | 1996-08-10 | 1998-01-15 | Telefunken Microelectron | Method of detecting angular acceleration of motor vehicles |
| US5793168A (en) | 1996-08-23 | 1998-08-11 | Micro Linear Corporation | Active deceleration circuit for a brushless DC motor |
| US5914882A (en) | 1996-10-09 | 1999-06-22 | Hilti Aktiengesellschaft | Device for and method of preventing accidents in hand-operated machine tools due to tool jamming |
| US5879111A (en) | 1996-11-11 | 1999-03-09 | Hilti Aktiengesellschaft | Hand-held device |
| EP0841127B1 (en) | 1996-11-11 | 2003-03-19 | HILTI Aktiengesellschaft | Motor-driven hand tool with safety device in case of jammed tool |
| EP0841126B1 (en) | 1996-11-11 | 2003-03-19 | HILTI Aktiengesellschaft | Motor-driven hand tool with safety device in case of jammed tool |
| US5954457A (en) | 1996-11-11 | 1999-09-21 | Hilti Aktiengesellschaft | Hand-held device |
| US6161629A (en) | 1996-11-19 | 2000-12-19 | Hohmann; Joerg | Power wrench |
| USD392532S (en) | 1996-11-27 | 1998-03-24 | Hsuan-Sen Shiao | Driving assembly of a screwdriver |
| JPH10156739A (en) | 1996-12-03 | 1998-06-16 | Kanyuki Tomidokoro | Screw driver of type convertible between power-assisted rotation and high-speed rotation |
| DE19651124C1 (en) | 1996-12-09 | 1998-05-28 | Siemens Ag | Automobile lateral pitching detection arrangement |
| US6055142A (en) | 1997-04-23 | 2000-04-25 | Hilti Aktiengesellschaft | Manually guided machine tool with a safety device |
| USD392535S (en) | 1997-05-15 | 1998-03-24 | Maxtech Manufacturing Inc. | Tool handle |
| DE19726006A1 (en) | 1997-06-19 | 1998-09-10 | Bosch Gmbh Robert | Rotation sensor for motor vehicles, etc. |
| US6408252B1 (en) | 1997-08-01 | 2002-06-18 | Dynalog, Inc. | Calibration system and displacement measurement device |
| US6209394B1 (en) | 1997-10-23 | 2001-04-03 | Stmicroelectronics S.R.L. | Integrated angular speed sensor device and production method thereof |
| US6387725B1 (en) | 1997-10-23 | 2002-05-14 | Stmicroelectronics S.R.L. | Production method for integrated angular speed sensor device |
| US6129699A (en) | 1997-10-31 | 2000-10-10 | Sorenson Development, Inc. | Portable persistaltic pump for peritoneal dialysis |
| US6236177B1 (en) | 1998-06-05 | 2001-05-22 | Milwaukee Electric Tool Corporation | Braking and control circuit for electric power tools |
| US6158929A (en) | 1998-07-01 | 2000-12-12 | Bae Systems Plc | Electronically triggered surface sensor unit |
| US6062939A (en) | 1998-08-07 | 2000-05-16 | Mattel, Inc. | Toy power tool |
| US6147626A (en) | 1998-08-11 | 2000-11-14 | Visteon Technologies, Llc | Determination of zero-angular-velocity output level for angular velocity sensor |
| EP1008422B1 (en) | 1998-12-10 | 2007-02-14 | HILTI Aktiengesellschaft | Method and device for handheld machine tools to prevent accidents caused by tool blockage |
| US6111515A (en) | 1998-12-10 | 2000-08-29 | Hilti Aktiengesellschaft | Method of and apparatus for preventing accidents during working with hand-held tools with a rotatable working tool |
| GB2347100B (en) | 1999-01-12 | 2001-01-17 | Bosch Gmbh Robert | Hand-held machine tool |
| DE19900882A1 (en) | 1999-01-12 | 2000-07-13 | Bosch Gmbh Robert | Hand-held machine tool, especially drill or angle grinder, has locking and blocking elements brought into engagement axially in direction of blocking element rotation axis in uncontrolled state |
| US6415875B1 (en) | 1999-01-12 | 2002-07-09 | Robert Bosch Gmbh | Hand-held power tool |
| US6834730B2 (en) | 1999-04-29 | 2004-12-28 | Stephen F. Gass | Power tools |
| US20030196824A1 (en) | 1999-04-29 | 2003-10-23 | Gass Stephen F. | Power tools |
| US7121358B2 (en) | 1999-04-29 | 2006-10-17 | Gass Stephen F | Power tools |
| US6049460A (en) | 1999-07-19 | 2000-04-11 | Eaton Corporation | Trigger actuated control having supplemental heat sink |
| US6640733B2 (en) | 1999-12-08 | 2003-11-04 | Edward H. Huffmeyer | Inclinometer-controlled apparatus for varying the rate of seed population |
| US6612034B2 (en) | 2000-01-24 | 2003-09-02 | Koninklijke Philips Electronics N.V. | Hand-held electrical appliance for personal care or for use as a tool |
| US20010042630A1 (en) | 2000-05-02 | 2001-11-22 | Ferdinand Kristen | Rotating electric hand tool implement with safety routine |
| EP1151828B1 (en) | 2000-05-02 | 2007-09-12 | HILTI Aktiengesellschaft | Rotatable electric hand tool with security system |
| US7011165B2 (en) | 2000-05-02 | 2006-03-14 | Hilti Aktiengesellschaft | Rotating electric hand tool implement with safety routine |
| US7154406B1 (en) | 2000-08-10 | 2006-12-26 | Black & Decker Inc. | Power tool level indicator |
| US20020053892A1 (en) | 2000-08-24 | 2002-05-09 | Roland Schaer | Microcontroller for and a method of controlling operation of the safety clutch of a hand-held electric power tool |
| US20020033267A1 (en) | 2000-09-16 | 2002-03-21 | Edwin Schweizer | Electrical hand-held power tool with a torque control |
| EP1188521A3 (en) | 2000-09-16 | 2002-05-15 | HILTI Aktiengesellschaft | Powered tool with torque control |
| US20040011632A1 (en) | 2000-10-19 | 2004-01-22 | Peter Hellmann | Safety switch device for a rotary powered hand tool |
| EP1201373B1 (en) | 2000-10-19 | 2008-09-24 | HILTI Aktiengesellschaft | Safety circuit for a rotary electric hand tool |
| US20020066632A1 (en) | 2000-12-01 | 2002-06-06 | Ferdinand Kristen | Safety clutch for electrical hand-held tool |
| US6923268B2 (en) | 2001-02-28 | 2005-08-02 | Katsuyuki Totsu | Electric rotational tool driving switch system |
| US20030000651A1 (en) | 2001-03-23 | 2003-01-02 | Genser Hans Georg | Rotating evaporator with process-dependent rotating speed regulation |
| US20030116332A1 (en) | 2001-04-06 | 2003-06-26 | Peter Nadig | Hand-held machine tool |
| EP1379362B1 (en) | 2001-04-06 | 2011-05-25 | Robert Bosch Gmbh | Hand-held machine tool |
| US7055620B2 (en) | 2001-04-06 | 2006-06-06 | Robert Bosch Gmbh | Hand-held machine tool |
| DE10117121A1 (en) | 2001-04-06 | 2002-10-17 | Bosch Gmbh Robert | Hand tool |
| US6871128B2 (en) | 2001-04-19 | 2005-03-22 | Kawasaki Jukogyo Kabushiki Kaisha | Speed change control method and speed change controller |
| US6910540B2 (en) | 2001-04-25 | 2005-06-28 | Katsuyuki Totsu | Torque control system for electrically driven rotating tools |
| US20040226424A1 (en) | 2001-07-11 | 2004-11-18 | O'banion Michael | Power tool safety mechanisms |
| US6516896B1 (en) | 2001-07-30 | 2003-02-11 | The Stanley Works | Torque-applying tool and control therefor |
| US20030042859A1 (en) | 2001-08-06 | 2003-03-06 | Gorti Bhanuprasad V. | Excitation circuit and control method for flux switching motor |
| US20030037423A1 (en) | 2001-08-24 | 2003-02-27 | Siegel Robert P. | Intelligent power tool |
| US6779952B2 (en) | 2001-09-20 | 2004-08-24 | Weidong Zhang | Stepless speed change bench drill |
| US6965835B2 (en) | 2001-09-28 | 2005-11-15 | Spx Corporation | Torque angle sensing system and method with angle indication |
| US7055622B2 (en) | 2001-11-20 | 2006-06-06 | Black & Decker Inc. | Power tool having a handle and a pivotal tool body |
| US6983506B1 (en) | 2001-11-20 | 2006-01-10 | Coffee Brown | Universal, interchangeable tool attachment system |
| US20050095061A1 (en) | 2002-03-08 | 2005-05-05 | Nippon Kayaku Kabushiki-Kasha | Laser welded tube fitting structure and gas generator with the tube structure |
| US20040069511A1 (en) | 2002-07-03 | 2004-04-15 | David Spielmann | Hand-held power tool with a torque cut-off device |
| US6842991B2 (en) | 2002-07-31 | 2005-01-18 | Robert W. Levi | Gyro aided magnetic compass |
| EP1391271B1 (en) | 2002-08-19 | 2011-01-19 | HILTI Aktiengesellschaft | Safety device for multi-function handtool |
| US20040104034A1 (en) | 2002-08-19 | 2004-06-03 | Claus Osselmann | Safety module for a multifunctional handheld tool |
| US6843140B2 (en) | 2002-08-19 | 2005-01-18 | Hilti Aktiengesellschaft | Safety module for a multifunctional handheld tool |
| US7090030B2 (en) | 2002-09-03 | 2006-08-15 | Microtorq L.L.C. | Tranducerized torque wrench |
| EP1398119B1 (en) | 2002-09-11 | 2010-04-07 | Black & Decker Inc. | Safety cut-off for power tool with rotating tool bit |
| WO2004024398A1 (en) | 2002-09-13 | 2004-03-25 | Black & Decker Inc | Rotary tool |
| US20060124331A1 (en) | 2002-09-13 | 2006-06-15 | Michael Stirm | Rotary tool |
| US7506694B2 (en) | 2002-09-13 | 2009-03-24 | Black & Decker Inc. | Rotary tool |
| JP4226869B2 (en) | 2002-10-03 | 2009-02-18 | 日本圧着端子製造株式会社 | Card connector |
| USD485737S1 (en) | 2003-01-10 | 2004-01-27 | Toolovation, Llc | Battery powered screwdriver |
| US20050000998A1 (en) | 2003-01-27 | 2005-01-06 | Mario Grazioli | Hand-held working tool |
| US7036703B2 (en) | 2003-01-27 | 2006-05-02 | Hilti Aktiengesellschaft | Hand-held working tool |
| USD493888S1 (en) | 2003-02-04 | 2004-08-03 | Sherwood Services Ag | Electrosurgical pencil with pistol grip |
| EP1447177B1 (en) | 2003-02-05 | 2011-04-20 | Makita Corporation | Power tool with a torque limiter using only rotational angle detecting means |
| US6968908B2 (en) | 2003-02-05 | 2005-11-29 | Makita Corporation | Power tools |
| US20040226728A1 (en) | 2003-03-01 | 2004-11-18 | Hans Boeni | Process for controlling an axially hammering and rotating electric hand-held machine tool |
| EP1452278B1 (en) | 2003-03-01 | 2011-05-11 | HILTI Aktiengesellschaft | Control method of a percussion power drill |
| DE10309414B4 (en) | 2003-03-05 | 2009-01-08 | Robert Bosch Gmbh | Sensor device and associated method for a hand tool |
| US20040182175A1 (en) | 2003-03-19 | 2004-09-23 | The Boeing Company | Tool and associated methods for controllably applying torque to a fastener |
| US7395871B2 (en) | 2003-04-24 | 2008-07-08 | Black & Decker Inc. | Method for detecting a bit jam condition using a freely rotatable inertial mass |
| US20090120657A1 (en) | 2003-04-24 | 2009-05-14 | Black & Decker Inc. | Safety mechanism for a rotary hammer |
| EP1470898B1 (en) | 2003-04-24 | 2008-09-17 | BLACK & DECKER INC. | Control system and method for a power tool |
| US20040211573A1 (en) | 2003-04-24 | 2004-10-28 | Carrier David A. | Safety mechanism for a rotary hammer |
| US7487845B2 (en) | 2003-04-24 | 2009-02-10 | Black & Decker Inc. | Safety mechanism for a rotary hammer |
| US7730963B2 (en) | 2003-04-24 | 2010-06-08 | Black & Decker Inc. | Safety mechanism for a rotary hammer |
| US20100263891A1 (en) | 2003-04-24 | 2010-10-21 | Black & Decker Inc. | Safety mechanism for a rotary hammer |
| DE10318798B4 (en) | 2003-04-25 | 2006-01-26 | Robert Bosch Gmbh | drill |
| GB2400811B (en) | 2003-04-25 | 2005-07-06 | Bosch Gmbh Robert | Drilling appliance with automatic position detection |
| USD494829S1 (en) | 2003-05-19 | 2004-08-24 | Jack Lin | Handle for screwdriver |
| US6796921B1 (en) | 2003-05-30 | 2004-09-28 | One World Technologies Limited | Three speed rotary power tool |
| US7121598B2 (en) | 2003-06-05 | 2006-10-17 | Societe De Prospection Et D'inventions Techniques Spit | Pole for remote operation of a hand tool |
| US20060243469A1 (en) | 2003-06-11 | 2006-11-02 | Webster Craig D | Handwheel-operated device |
| DE10340710A1 (en) | 2003-09-04 | 2005-03-31 | Saltus-Werk Max Forst Gmbh | An electronic torque wrench has gyroscopic angle measurement and lighting indication |
| US7197961B2 (en) | 2003-09-29 | 2007-04-03 | Robert Bosch Gmbh | Battery-driven screwdriver with a two-part motor housing and a separate, flanged gear unit |
| US7134364B2 (en) | 2003-09-29 | 2006-11-14 | Robert Bosch Gmbh | Battery-driven screwdriver |
| EP1524084B1 (en) | 2003-10-14 | 2009-08-19 | Panasonic Electric Works Co., Ltd. | Power impact tool |
| DE10348756B4 (en) | 2003-10-21 | 2011-01-05 | Zf Friedrichshafen Ag | Rotary hammer or drill with electromagnetic clutch and method for operating the electromagnetic clutch |
| JP2005144625A (en) | 2003-11-18 | 2005-06-09 | Mazda Motor Corp | Handheld power tool control device |
| US20070095634A1 (en) | 2003-11-28 | 2007-05-03 | Valeo Thermal Systems Japan Corporation | Rotary switch mechanism |
| US7504791B2 (en) | 2004-01-22 | 2009-03-17 | Robert Bosch Gmbh | Electric power tool with optimized operating range |
| US7347158B2 (en) | 2004-01-22 | 2008-03-25 | Graham Hawkes | Safety system for scuba divers operating underwater propulsion devices |
| US20070068480A1 (en) | 2004-01-28 | 2007-03-29 | Juergen Wiker | Method for switching off a power tool |
| US7372226B2 (en) | 2004-01-28 | 2008-05-13 | Robert Bosch Gmbh | Method for switching off a power tool |
| EP1711308B1 (en) | 2004-01-28 | 2007-09-26 | Robert Bosch Gmbh | Method for switching off an electric machine tool when blocked, and an electric machine tool |
| WO2005095061A1 (en) | 2004-04-01 | 2005-10-13 | Atlas Copco Tools Ab | Method for determining the angular movement of the output shaft of an impulse nut runner at tightening a screw joint |
| USD534651S1 (en) | 2004-04-01 | 2007-01-02 | Kinamed, Inc. | Powered surgical screwdriver |
| US20050217874A1 (en) | 2004-04-02 | 2005-10-06 | Michael Forster | Method for operating a power driver |
| US7331406B2 (en) | 2004-06-21 | 2008-02-19 | Duraspin Products Llc | Apparatus for controlling a fastener driving tool, with user-adjustable torque limiting control |
| US7234536B2 (en) | 2004-08-04 | 2007-06-26 | C. & E. Fein Gmbh | Power screwdriver |
| US7723953B2 (en) | 2004-08-09 | 2010-05-25 | Robert Bosch Gmbh | Battery-operated screwdriver and charger shell therefor |
| US7936148B2 (en) | 2004-08-09 | 2011-05-03 | Robert Bosch Gmbh | Battery-operated screwdriver and charger shell therefor |
| US7546785B2 (en) | 2004-08-09 | 2009-06-16 | Robert Bosch Gmbh | Battery-operated screwdriver |
| US20070256914A1 (en) | 2004-08-09 | 2007-11-08 | Guenter Lohr | Cordless Screwdriver |
| US7182148B1 (en) | 2004-08-11 | 2007-02-27 | William Szieff | Tool with motion and orientation indicators |
| USD513160S1 (en) | 2004-09-17 | 2005-12-27 | The Faucet-Queens Inc. | Cordless drill |
| USD517634S1 (en) | 2004-09-22 | 2006-03-21 | Taylor Made Golf Company, Inc. | Golf club wrench |
| US7463952B2 (en) | 2004-10-13 | 2008-12-09 | Continental Automotive France | Method and device for processing measurement signals from a movement sensor on board a motor vehicle |
| US7688028B2 (en) | 2004-10-18 | 2010-03-30 | Black & Decker Inc. | Cordless power system |
| US20060081368A1 (en) | 2004-10-19 | 2006-04-20 | Halliburton Energy Services, Inc. | Tubing injector for variable diameter tubing |
| US7681659B2 (en) | 2004-10-20 | 2010-03-23 | Black & Decker Inc. | Power tool anti-kickback system with rotational rate sensor |
| US20060081386A1 (en) | 2004-10-20 | 2006-04-20 | Qiang Zhang | Power tool anti-kickback system with rotational rate sensor |
| US7552781B2 (en) | 2004-10-20 | 2009-06-30 | Black & Decker Inc. | Power tool anti-kickback system with rotational rate sensor |
| US7410006B2 (en) | 2004-10-20 | 2008-08-12 | Black & Decker Inc. | Power tool anti-kickback system with rotational rate sensor |
| US20080110653A1 (en) | 2004-10-20 | 2008-05-15 | Qiang Zhang | Power tool anti-kickback system with rotational rate sensor |
| US20070084613A1 (en) | 2004-10-20 | 2007-04-19 | Qiang Zhang | Power tool anti-kickback system with rotational rate sensor |
| WO2006045072B1 (en) | 2004-10-20 | 2007-05-31 | Black & Decker Inc | Power tool anti-kickback system with rotational rate sensor |
| US7225884B2 (en) | 2004-10-26 | 2007-06-05 | Robert Bosch Gmbh | Hand power tool, in particular drilling screwdriver |
| US20060103733A1 (en) | 2004-11-18 | 2006-05-18 | International Business Machines Corporation | Changing a function of a device based on tilt of the device for longer than a time period |
| GB2420843B (en) | 2004-12-03 | 2007-10-24 | Bosch Gmbh Robert | Hand machine tool |
| EP1670134A1 (en) | 2004-12-09 | 2006-06-14 | Ferm B.V. | Apparatus and method for controlling a motor |
| US7689378B2 (en) | 2005-02-15 | 2010-03-30 | Magneto Inertial Sensing Technology, Inc. | Motion sensing apparatus, systems and techniques |
| US7832286B2 (en) | 2005-04-07 | 2010-11-16 | Kyoto Tool Co., Ltd. | Torque wrench |
| US7642741B2 (en) | 2005-04-27 | 2010-01-05 | Sidman Adam D | Handheld platform stabilization system employing distributed rotation sensors |
| US7359816B2 (en) | 2005-05-25 | 2008-04-15 | Analog Devices, Inc. | Sensor calibration method and apparatus |
| US7469753B2 (en) | 2005-06-01 | 2008-12-30 | Milwaukee Electric Tool Corporation | Power tool, drive assembly, and method of operating the same |
| US7456603B2 (en) | 2005-07-19 | 2008-11-25 | Hitachi, Ltd. | Phase detection circuit, resolver/digital converter using the circuit, and control system using the converter |
| US7650699B2 (en) | 2005-07-22 | 2010-01-26 | Kazuhiro Yamamoto | Electric drill |
| US20080276760A1 (en) | 2005-08-11 | 2008-11-13 | Jong Phil Kim | Driver |
| US7682035B2 (en) | 2005-09-01 | 2010-03-23 | Robert Bosch Gmbh | Housing device for hand-held power tool |
| US7526398B1 (en) | 2005-09-21 | 2009-04-28 | Samsung Electronics Co., Ltd. | Method and apparatus for calibrating gyro-sensor |
| US7551411B2 (en) | 2005-10-12 | 2009-06-23 | Black & Decker Inc. | Control and protection methodologies for a motor control module |
| US7861796B2 (en) | 2005-11-04 | 2011-01-04 | Robert Bosch Gmbh | Method of operating drill with solid state speed control |
| US7400106B2 (en) | 2005-11-04 | 2008-07-15 | Robert Bosch Gmbh | Method and apparatus for providing torque limit feedback in a power drill |
| US7487844B2 (en) | 2005-11-04 | 2009-02-10 | Robert Bosch Gmbh | Drill with solid state speed control |
| US7708085B2 (en) | 2005-11-04 | 2010-05-04 | Robert Bosch Gmbh | Articulating drill with optical speed control and method of operation |
| US7926585B2 (en) | 2005-11-04 | 2011-04-19 | Robert Bosch Gmbh | Method and apparatus for an articulating drill |
| US20070144270A1 (en) | 2005-11-28 | 2007-06-28 | Crass Matthew M | Torque-angle instrument |
| US7565844B2 (en) | 2005-11-28 | 2009-07-28 | Snap-On Incorporated | Torque-angle instrument |
| US7774155B2 (en) | 2006-03-10 | 2010-08-10 | Nintendo Co., Ltd. | Accelerometer-based controller |
| GB2436959B (en) | 2006-04-07 | 2010-10-06 | Bosch Gmbh Robert | Electric machine tool and method for operating the latter |
| DE102006016441A1 (en) | 2006-04-07 | 2007-10-11 | Robert Bosch Gmbh | Electric machine tool operating method, involves driving electric machine tool by electric motor, where connection of battery unit is made to energize motor that is interrupted upon identification of blocking case |
| US8025106B2 (en) | 2006-04-12 | 2011-09-27 | Robert Bosch Gmbh | Method for tightening a screw connection and screw driving tool |
| US20070281274A1 (en) | 2006-06-05 | 2007-12-06 | Allan Schraffran | Dental wrench and method of use thereof |
| US7900715B2 (en) | 2006-06-19 | 2011-03-08 | Positec Power Tools (Suzhou) Co., Ltd. | Variable speed tool and variable speed control method |
| US20080011102A1 (en) | 2006-07-13 | 2008-01-17 | Schell Craig A | Control scheme for detecting and preventing torque conditions in a power tool |
| EP1878541A2 (en) | 2006-07-13 | 2008-01-16 | Black & Decker, Inc. | Control Scheme for Detecting and Preventing Torque Conditions in a Power Tool |
| USD565380S1 (en) | 2006-07-19 | 2008-04-01 | Rinner James A | Screwdriver T-handle |
| EP1900484A3 (en) | 2006-09-12 | 2014-09-03 | Black & Decker Inc. | Power tool anti-kickback system with rotational rate sensor |
| US7942084B2 (en) | 2006-12-06 | 2011-05-17 | American Power Tool Company | Powered driver and methods for reliable repeated securement of threaded connectors to a correct tightness |
| US8136382B2 (en) | 2007-03-15 | 2012-03-20 | Northrop Grumman Guidance And Electronics Company, Inc. | Self-calibration of scale factor for dual resonator class II Coriolis vibratory gyros |
| US8179069B2 (en) | 2007-08-24 | 2012-05-15 | Makita Corporation | Electric power tool, control unit and recording medium |
| US20090051306A1 (en) | 2007-08-24 | 2009-02-26 | Makita Corporation | Electric power tool, control unit and recording medium |
| US7882899B2 (en) | 2007-08-29 | 2011-02-08 | Positec Power Tools (Suzhou) Co., Ltd | Power tool having control system for changing rotational speed of output shaft |
| US7882900B2 (en) | 2007-08-29 | 2011-02-08 | Positec Power Tools (Suzhou) Co., Ltd | Power tool with signal generator |
| WO2009032314A1 (en) | 2007-09-07 | 2009-03-12 | Black & Decker Inc. | Switchable anti-lock control |
| US20090065225A1 (en) | 2007-09-07 | 2009-03-12 | Black & Decker Inc. | Switchable anti-lock control |
| US20090078057A1 (en) | 2007-09-20 | 2009-03-26 | Asi Datamyte | Residual torque analyzer |
| DE102007048052A1 (en) | 2007-10-05 | 2009-04-09 | Daubner & Stommel GbR Bau-Werk-Planung (vertretungsberechtigter Gesellschafter: Matthias Stommel, 27777 Ganderkesee) | Motor-driven hand machine tool i.e. motor chain saw, operating method, involves eliminating and/or reducing working movements of cutting tool to safe measure depending on detected machine movements of hand machine tool |
| US20090139738A1 (en) | 2007-12-04 | 2009-06-04 | Peter Lippek | Screwing Tool And Method For Controlling The Tightening Angle Of Screwed Joints |
| WO2009083306A1 (en) | 2007-12-27 | 2009-07-09 | Robert Bosch Gmbh | Device and method for taking a safety precaution in an electrical tool |
| DE102007062727A1 (en) | 2007-12-27 | 2009-07-02 | Robert Bosch Gmbh | Device and method for taking a safety measure in a power tool |
| US20090211774A1 (en) | 2008-02-25 | 2009-08-27 | Dvells Jr Walter E | Attachment for stitching tool |
| US20110153081A1 (en) | 2008-04-24 | 2011-06-23 | Nikolai Romanov | Robotic Floor Cleaning Apparatus with Shell Connected to the Cleaning Assembly and Suspended over the Drive System |
| US20110202175A1 (en) | 2008-04-24 | 2011-08-18 | Nikolai Romanov | Mobile robot for cleaning |
| US20110160903A1 (en) | 2008-04-24 | 2011-06-30 | Nikolai Romanov | Articulated Joint and Three Points of Contact |
| WO2009136840A1 (en) | 2008-05-08 | 2009-11-12 | Atlas Copco Tools Ab | Method and device for tightening joints |
| US20110079406A1 (en) | 2008-05-08 | 2011-04-07 | Atlas Copco Tools Ab | Method and device for tightening joints |
| US20090295313A1 (en) | 2008-05-30 | 2009-12-03 | Makita Corporation | Rechargeable power tool, control unit and recording medium |
| US7912664B2 (en) | 2008-09-11 | 2011-03-22 | Northrop Grumman Guidance And Electronics Company, Inc. | Self calibrating gyroscope system |
| US20100188245A1 (en) | 2008-10-02 | 2010-07-29 | Certusview Technologies, Llc | Locate apparatus having enhanced features for underground facility locate operations, and associated methods and systems |
| US20100189887A1 (en) | 2008-10-02 | 2010-07-29 | Certusview Technologies, Llc | Marking apparatus having enhanced features for underground facility marking operations, and associated methods and systems |
| US20100247754A1 (en) | 2008-10-02 | 2010-09-30 | Certusview Technologies, Llc | Methods and apparatus for dispensing marking material in connection with underground facility marking operations based on environmental information and/or operational information |
| US20100263591A1 (en) | 2008-10-02 | 2010-10-21 | Certusview Technologies, Llc | Marking apparatus having environmental sensors and operations sensors for underground facility marking operations, and associated methods and systems |
| US20100245086A1 (en) | 2008-10-02 | 2010-09-30 | Certusview Technologies, Llc | Marking apparatus configured to detect out-of-tolerance conditions in connection with underground facility marking operations, and associated methods and systems |
| USD613144S1 (en) | 2008-10-08 | 2010-04-06 | Fu-Hui Lin | Hand tool |
| DE102009007977A1 (en) | 2009-02-06 | 2009-07-23 | Konrad, Hilmar, Dipl.-Ing. | Angular deviation indicating method for e.g. drilling machine, involves comparing current detected rotation angle value continuously with reference valve, and indicating comparison result as measure of angle deviation |
| DE102009001298A1 (en) | 2009-03-03 | 2010-09-16 | Hilti Aktiengesellschaft | self-tapping |
| US20100256939A1 (en) | 2009-04-03 | 2010-10-07 | The Regents Of The University Of Michigan | Heading Error Removal System for Tracking Devices |
| USD606827S1 (en) | 2009-06-18 | 2009-12-29 | 3M Innovative Properties Company | Small, portable power tool |
| US20120090863A1 (en) | 2010-01-07 | 2012-04-19 | Daniel Puzio | Screwdriving tool having a driving tool with a removable contact trip assembly |
| USD618527S1 (en) | 2010-03-22 | 2010-06-29 | IBT Holdings, Inc | T tool handle |
| US20110301900A1 (en) | 2010-06-04 | 2011-12-08 | Apple Inc. | Gyro zero turn rate offset correction over temperature in a personal mobile device |
| US20120000682A1 (en) | 2010-07-01 | 2012-01-05 | Hilti Aktiengesellschaft | Hand-held power tool |
Non-Patent Citations (2)
| Title |
|---|
| Husling, Rand, MEMS Inertial Rate and Acceleration Sensor, pp. 169-176. |
| Tonshoff, H.K., Developments and Trends in Monitoring and Control of Machining Processes, Annals of the CIRP vol. 37/2/1988 pp. 611-622. |
Cited By (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US12059778B2 (en) | 2015-04-28 | 2024-08-13 | Milwaukee Electric Tool Corporation | Precision torque screwdriver |
| US11400570B2 (en) | 2015-04-28 | 2022-08-02 | Milwaukee Electric Tool Corporation | Precision torque screwdriver |
| US10357871B2 (en) | 2015-04-28 | 2019-07-23 | Milwaukee Electric Tool Corporation | Precision torque screwdriver |
| US11529725B2 (en) | 2017-10-20 | 2022-12-20 | Milwaukee Electric Tool Corporation | Power tool including electromagnetic clutch |
| US10981267B2 (en) | 2017-10-26 | 2021-04-20 | Milwaukee Electric Tool Corporation | Kickback control methods for power tools |
| US11607790B2 (en) | 2017-10-26 | 2023-03-21 | Milwaukee Electric Tool Corporation | Kickback control methods for power tools |
| US11648655B2 (en) | 2017-10-26 | 2023-05-16 | Milwaukee Electric Tool Corporation | Kickback control methods for power tools |
| US12179331B2 (en) | 2017-10-26 | 2024-12-31 | Milwaukee Electric Tool Corporation | Kickback control methods for power tools |
| US11077509B2 (en) | 2018-03-16 | 2021-08-03 | Milwaukee Electric Tool Corporation | Pipe threader |
| US12220756B2 (en) | 2018-03-16 | 2025-02-11 | Milwaukee Electric Tool Corporation | Pipe threader |
| US11752604B2 (en) | 2018-04-13 | 2023-09-12 | Snap-On Incorporated | System and method for measuring torque and angle |
| US12528161B2 (en) | 2018-04-13 | 2026-01-20 | Snap-On Incorporated | System and method for measuring torque and angle |
| US12074432B2 (en) | 2020-03-10 | 2024-08-27 | Milwaukee Electric Tool Corporation | Kickback control methods for a power tool including a force sensor |
| US11705721B2 (en) | 2020-03-10 | 2023-07-18 | Milwaukee Electric Tool Corporation | Kickback control methods for a power tool including a force sensor |
| US12059777B2 (en) | 2020-08-10 | 2024-08-13 | Milwaukee Electric Tool Corporation | Powered screwdriver including clutch setting sensor |
| US11845173B2 (en) | 2020-10-16 | 2023-12-19 | Milwaukee Electric Tool Corporation | Anti bind-up control for power tools |
| US12485524B2 (en) | 2020-10-16 | 2025-12-02 | Milwaukee Electric Tool Corporation | Anti bind-up control for power tools |
| US20240189975A1 (en) * | 2022-12-08 | 2024-06-13 | CSP Consulting, LLC | Rotary tool with reduced reactionary torque |
| US12090620B2 (en) * | 2022-12-08 | 2024-09-17 | CSP Consulting, LLC | Rotary tool with reduced reactionary torque |
Also Published As
| Publication number | Publication date |
|---|---|
| US7552781B2 (en) | 2009-06-30 |
| US20070084613A1 (en) | 2007-04-19 |
| EP1900484A2 (en) | 2008-03-19 |
| US20080110653A1 (en) | 2008-05-15 |
| USRE44993E1 (en) | 2014-07-08 |
| WO2008033310A3 (en) | 2009-04-09 |
| CN201152938Y (en) | 2008-11-19 |
| EP1900484A3 (en) | 2014-09-03 |
| EP2949432B1 (en) | 2016-12-21 |
| US7681659B2 (en) | 2010-03-23 |
| EP1900484B1 (en) | 2016-04-06 |
| EP2949432A1 (en) | 2015-12-02 |
| USRE44311E1 (en) | 2013-06-25 |
| WO2008033310A2 (en) | 2008-03-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| USRE45112E1 (en) | Power tool anti-kickback system with rotational rate sensor | |
| US7410006B2 (en) | Power tool anti-kickback system with rotational rate sensor | |
| US11192232B2 (en) | Power tool with anti-kickback control system | |
| EP2508305B1 (en) | Control scheme for a power tool | |
| JP6709580B2 (en) | Handheld power tools | |
| JP6709129B2 (en) | Electric tool | |
| JP5537122B2 (en) | Electric tool | |
| US20140053419A1 (en) | Control circuit for reciprocating saws | |
| CN107000187B (en) | Control method for a hand-held power tool | |
| US20080021590A1 (en) | Adaptive control scheme for detecting and preventing torque conditions in a power tool | |
| US20180043521A1 (en) | Safety method and handheld power tool | |
| CN201159251Y (en) | Controller for power tool having rotary shaft | |
| EP0808011B1 (en) | Anti-kickback and breakthrough torque control for power tool |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| CC | Certificate of correction | ||
| MAFP | Maintenance fee payment |
Free format text: PAYMENT OF MAINTENANCE FEE, 8TH YEAR, LARGE ENTITY (ORIGINAL EVENT CODE: M1552) Year of fee payment: 8 |
|
| MAFP | Maintenance fee payment |
Free format text: PAYMENT OF MAINTENANCE FEE, 12TH YEAR, LARGE ENTITY (ORIGINAL EVENT CODE: M1553); ENTITY STATUS OF PATENT OWNER: LARGE ENTITY Year of fee payment: 12 |