RU2742971C2 - Устройство и способ для формирования вводной подушки для субретинальной доставки терапевтического средства - Google Patents
Устройство и способ для формирования вводной подушки для субретинальной доставки терапевтического средства Download PDFInfo
- Publication number
- RU2742971C2 RU2742971C2 RU2019101083A RU2019101083A RU2742971C2 RU 2742971 C2 RU2742971 C2 RU 2742971C2 RU 2019101083 A RU2019101083 A RU 2019101083A RU 2019101083 A RU2019101083 A RU 2019101083A RU 2742971 C2 RU2742971 C2 RU 2742971C2
- Authority
- RU
- Russia
- Prior art keywords
- needle
- fluid
- cannula
- control module
- sensor
- Prior art date
Links
Images






















Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F9/00—Methods or devices for treatment of the eyes; Devices for putting-in contact lenses; Devices to correct squinting; Apparatus to guide the blind; Protective devices for the eyes, carried on the body or in the hand
- A61F9/007—Methods or devices for eye surgery
- A61F9/00736—Instruments for removal of intra-ocular material or intra-ocular injection, e.g. cataract instruments
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/34—Trocars; Puncturing needles
- A61B17/3403—Needle locating or guiding means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F9/00—Methods or devices for treatment of the eyes; Devices for putting-in contact lenses; Devices to correct squinting; Apparatus to guide the blind; Protective devices for the eyes, carried on the body or in the hand
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F9/00—Methods or devices for treatment of the eyes; Devices for putting-in contact lenses; Devices to correct squinting; Apparatus to guide the blind; Protective devices for the eyes, carried on the body or in the hand
- A61F9/0008—Introducing ophthalmic products into the ocular cavity or retaining products therein
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F9/00—Methods or devices for treatment of the eyes; Devices for putting-in contact lenses; Devices to correct squinting; Apparatus to guide the blind; Protective devices for the eyes, carried on the body or in the hand
- A61F9/007—Methods or devices for eye surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/178—Syringes
- A61M5/20—Automatic syringes, e.g. with automatically actuated piston rod, with automatic needle injection, filling automatically
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/178—Syringes
- A61M5/24—Ampoule syringes, i.e. syringes with needle for use in combination with replaceable ampoules or carpules, e.g. automatic
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/42—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests having means for desensitising skin, for protruding skin to facilitate piercing, or for locating point where body is to be pierced
- A61M5/427—Locating point where body is to be pierced, e.g. vein location means using ultrasonic waves, injection site templates
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/34—Trocars; Puncturing needles
- A61B17/3403—Needle locating or guiding means
- A61B2017/3405—Needle locating or guiding means using mechanical guide means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2210/00—Anatomical parts of the body
- A61M2210/06—Head
- A61M2210/0612—Eyes
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Veterinary Medicine (AREA)
- Animal Behavior & Ethology (AREA)
- Vascular Medicine (AREA)
- Ophthalmology & Optometry (AREA)
- Surgery (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Hematology (AREA)
- Anesthesiology (AREA)
- Dermatology (AREA)
- Pathology (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Infusion, Injection, And Reservoir Apparatuses (AREA)
- Medicines Containing Material From Animals Or Micro-Organisms (AREA)
Abstract
Изобретение относится к медицинской технике, а именно устройствам для субретинальной доставки терапевтического средства. Устройство содержит инъектор. При этом инъектор содержит: корпус, гибкую канюлю, продолжающуюся в дистальном направлении из корпуса, гибкую иглу, причем игла выполнена с возможностью поступательного перемещения относительно канюли, и датчик, причем датчик выполнен с возможностью определения положения иглы относительно канюли. Устройство также содержит: первую трубку для текучей среды, соединенную с иглой; вторую трубку для текучей среды, соединенную с иглой; и модуль управления, причем модуль управления связан с датчиком, причем модуль управления сообщается с первой трубкой для текучей среды, причем модуль управления сообщается со второй трубкой для текучей среды. Причем модуль управления выполнен с возможностью обеспечения подачи первой текучей среды по первой трубке в иглу по сигналу из датчика. Причем модуль управления дополнительно выполнен с возможностью обеспечения подачи второй текучей среды по второй трубке в иглу. 3 н. 17 з.п. ф-лы, 36 ил.
Description
ПРИОРИТЕТ
[0001] По настоящей заявке испрашивается приоритет по предварительной патентной заявке США № 62/351,611, «Entry Bleb Formation During Choroidal Penetration», поданной 17 июня 2016 г., описание которой включено в настоящую заявку путем отсылки.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
[0002] Глаз человека содержит несколько слоев. Белый наружный слой является склерой, которая окружает слой сосудистой оболочки. Сетчатка находится внутри слоя сосудистой оболочки. Склера содержит коллаген и эластичное волокно, обеспечивающие защиту сосудистой оболочки и сетчатки. Сосудистая оболочка включает в себя сосудистую сеть, снабжающую сетчатку кислородом и питательными веществами. Сетчатка содержит светочувствительную ткань, содержащую палочки и колбочки. В центре сетчатки, на задней стороне глаза находится желтое пятно, в общем, с центром на оси, проходящей через центр хрусталика и роговицы глаза (т.е. оптической оси). Желтое пятно обеспечивает центральное зрение, в частности, благодаря колбочкам.
[0003] Дегенерация желтого пятна является заболеванием, которое повреждает желтое пятно таким образом, что люди, страдающие дегенерацией желтого пятна, могут испытывать потерю или ухудшение центрального зрения, при сохранении периферического зрения до некоторой степени. Дегенерация желтого пятна может вызываться различными факторами, например, возрастом (известная также как «AMD» (возрастная макулярная дегенерация)) и генетикой. Дегенерация желтого пятна может происходить в «сухой» (неэкссудативной) форме, когда продукты клеточного распада, известные как друзы, накапливаются между сетчаткой и сосудистой оболочкой, что приводит к образованию области географической атрофиии. Дегенерация желтого пятна может также происходить во «влажной» (экссудативной) форме, когда кровеносные сосуды вырастают из сосудистой оболочки сзади сетчатки. Даже несмотря на то, что люди с дегенерацией желтого пятна могут сохранять периферическое зрение в некоторой степени, потеря центрального зрения может приводить к значительному снижению качества жизни. Кроме того, остающееся периферическое зрение может качественно ухудшаться и, в некоторых случаях, также может пропадать. Поэтому, может потребоваться проведение лечения дегенерации желтого пятна, чтобы предупредить или обратить потерю зрения, вызываемую дегенерацией желтого пятна. В некоторых случаях может потребоваться очень локализованное проведение такого лечения, например, путем доставки терапевтического вещества в субретинальный слой (под нейросенсорный слой сетчатки и выше пигментного эпителия сетчатки), непосредственно около области географической атрофии, вблизи желтого пятна. Однако, поскольку желтое пятно находится на задней стороне глаза и под чувствительным слоем сетчатки, подход к желтому пятну может быть сложной практической задачей.
[0004] Несмотря на то, что для лечения глаза уже разработано и использовалось множество различных хирургических способов и инструментов, полагают, что никто до авторов настоящего изобретения не разработал или применил изобретение, описанное в прилагаемой формуле изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0005] Хотя описание заканчивается формулой изобретения, которая конкретно выделяет и ясно заявляет настоящую технологию, предполагается, что настоящая технология будет понятнее из последующего описания некоторых примеров, рассматриваемых в связи с прилагаемыми чертежами, на которых сходные числовые позиции указывают одинаковые элементы, и на которых:
[0006] Фиг. 1 - вид в перспективе примерного инструмента для субретинальной доставки терапевтического средства c супрахороидальным подходом;
[0007] Фиг. 2 - вид в перспективе дистального конца примерной канюли, которую можно включить в состав инструмента, показанного на фиг. 1;
[0008] Фиг. 3A - вид сбоку в разрезе канюли, показанной на фиг. 2, при этом разрез взят по линии 3-3 на фиг. 2, с иглой в первом продольном положении;
[0009] Фиг. 3B - вид сбоку в разрезе канюли, показанной на фиг. 2, при этом разрез взят по линии 3-3 на фиг. 2, с иглой во втором продольном положении;
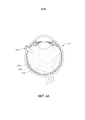
[00010] Фиг. 4A - вид в разрезе глаза пациента, с осветительным портом, установленным в глаз;
[00011] Фиг. 4B - вид в разрезе глаза, показанного на фиг. 4A, с шовной петлей, прикрепленной к глазу, и во время выполнения склеротомии;
[00012] Фиг. 4C - вид в разрезе глаза, показанного на фиг. 4A, с инструментом, показанным на фиг. 1, вводимым через склеротомическое отверстие и между склерой и сосудистой оболочкой глаза;
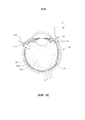
[00013] Фиг. 4D - вид в разрезе глаза, показанного на фиг. 4A, с инструментом, показанным на фиг. 1, введенным под визуальным контролем на задней стороне глаза, между склерой и сосудистой оболочкой;
[00014] Фиг. 4E - вид в разрезе глаза, показанного на фиг. 4A, с иглой инструмента, показанного на фиг. 1, выдвигаемой под визуальным контролем на задней стороне глаза, нажимающей на внешнюю поверхность сосудистой оболочки и, тем самым, вынуждающей сосудистую оболочку «деформироваться в виде шатра»;
[00015] Фиг. 4F - вид в разрезе глаза, показанного на фиг. 4A, с иглой, дозирующей вводную подушку под визуальным контролем на задней стороне глаза, при этом игла находится между склерой и сосудистой оболочкой, и вводная подушка находится в субретинальном пространстве между сосудистой оболочкой и сетчаткой;
[00016] Фиг. 4G - вид в разрезе глаза, показанного на фиг. 4A, с иглой, дозирующей терапевтическое средство в глаз на задней стороне глаза, между склерой и сосудистой оболочкой;
[00017] Фиг. 5A - детальный вид в разрезе глаза, показанного на фиг. 4A, изображенного в состоянии, показанном на фиг. 4E;
[00018] Фиг. 5B - детальный вид в разрезе глаза, показанного на фиг. 4A, изображенного в состоянии, показанном на фиг. 4F;
[00019] Фиг. 5C - детальный вид в разрезе глаза, показанного на фиг. 4A, изображенного в состоянии, показанном на фиг. 4G;
[00020] Фиг. 6 - вид в перспективе примерной системы для субретинальной доставки терапевтического средства c супрахороидальным подходом;
[00021] Фиг. 7 - вид в перспективе компонентов системы, показанной на фиг. 6, установленной около пациента;
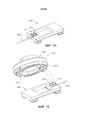
[00022] Фиг. 8 - вид в перспективе примерного инъекторного узла и примерного приводного узла инъектора системы, показанной на фиг. 6;
[00023] Фиг. 9 - покомпонентный вид в перспективе инъекторного узла, показанного на фиг. 8;
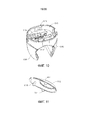
[00024] Фиг. 10 - вид в перспективе нижнего участка приводного узла инъектора, показанного на фиг. 8;
[00025] Фиг. 11 - вид в перспективе верхней качающейся пластины приводного узла инъектора, показанного на фиг. 8;
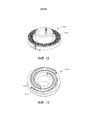
[00026] Фиг. 12 - вид в перспективе вращающегося кулачкового элемента приводного узла инъектора, показанного на фиг. 8;
[00027] Фиг. 13 - другой вид в перспективе вращающегося кулачкового элемента приводного узла инъектора, показанного на фиг. 12;
[00028] Фиг. 14 - вид в перспективе приводимого кулачком элемента приводного узла инъектора, показанного на фиг. 8;
[00029] Фиг. 15 - покомпонентный вид в перспективе вращающегося кулачкового элемента, показанного на фиг. 12, и приводимого кулачком элемента, показанного на фиг. 14;
[00030] Фиг. 16A - вид сверху приводного узла инъектора, показанного на фиг. 8, со снятым верхним участком и с приводимым кулачком элементом, показанным на фиг. 14, в проксимальном положении;
[00031] Фиг. 16B - вид сверху приводного узла инъектора, показанного на фиг. 8, со снятым верхним участком и с приводимым кулачком элементом, показанным на фиг. 14, в дистальном положении;
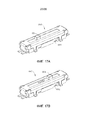
[00032] Фиг. 17A - вид в перспективе примерного линейного датчика приводного узла инъектора, показанного на фиг. 8, с ползунком датчика в проксимальном положении;
[00033] Фиг. 17B - вид в перспективе линейного датчика, показанного на фиг. 17A, с ползунком датчика в дистальном положении;
[00034] Фиг. 18 - вид в перспективе примерного альтернативного инъекторного узла, который может быть включен в состав системы, показанной на фиг. 6;
[00035] Фиг. 19 - покомпонентный вид в перспективе инъекторного узла, показанного на фиг. 18;
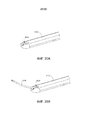
[00036] Фиг. 20A - вид в перспективе дистального конца канюли инъекторного узла, показанного на фиг. 18, с иглой, отведенную в канюлю;
[00037] Фиг. 20B - вид в перспективе дистального конца канюли, показанной на фиг. 20A, с иглой, выдвинутой из канюли;
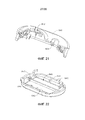
[00038] Фиг. 21 - вид в перспективе полукорпуса инъекторного узла, показанного на фиг. 18;
[00039] Фиг. 22 - вид в перспективе нижней качающейся пластины инъекторного узла, показанного на фиг. 18;
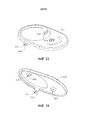
[00040] Фиг. 23 - вид в перспективе верхней качающейся пластина инъекторного узла, показанного на фиг. 18;
[00041] Фиг. 24 - другой вид в перспективе верхней качающейся пластины, показанной на фиг. 23;
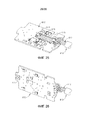
[00042] Фиг. 25 - вид в перспективе схемного модуля инъекторного узла, показанного на фиг. 18;
[00043] Фиг. 26 - другой вид в перспективе схемного модуля, показанного на фиг. 25;
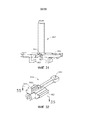
[00044] Фиг. 27 - вид в перспективе приводного узла иглы инъекторного узла, показанного на фиг. 18;
[00045] Фиг. 28 - вид спереди рамного элемента и привода иглы приводного узла иглы, показанного на фиг. 27;
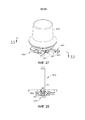
[00046] Фиг. 29 - вид в перспективе вращающегося кулачка приводного узла иглы, показанного на фиг. 27;
[00047] Фиг. 30 - вид сверху рамного элемента, показанного на фиг. 28;
[00048] Фиг. 31 - вид в перспективе рамного элемента, показанного на фиг. 28;
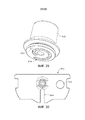
[00049] Фиг. 32 - вид в перспективе привода иглы, показанного на фиг. 28;
[00050] Фиг. 33A - вид в разрезе, взятом по линии 33-33, показанной на фиг. 27, приводного узла иглы, показанного на фиг. 27, с вращающимся кулачком, показанным на фиг. 29, в первом угловом положении и приводом иглы, показанным на фиг. 28, в проксимальном положении;
[00051] Фиг. 33B - вид в разрезе, взятом по линии 33-33, показанной на фиг. 27, приводного узла иглы, показанного на фиг. 27, с вращающимся кулачком, показанным на фиг. 29, во втором угловом положении и приводом иглы, показанным на фиг. 28, в дистальном положении;
[00052] Фиг. 34 - вид сверху привода иглы, показанного на фиг. 28, с подсоединенными к нему трубками для текучей среды;
[00053] Фиг. 35 - вид в разрезе привода иглы, показанного на фиг. 28, взятом по линии 35-35, показанной на фиг. 32, с подсоединенными к нему трубками для текучей среды, показанными на фиг. 34; и
[00054] Фиг. 36 - схематическое изображение нескольких примерных алгоритмов для подачи текучей среды для подушки и воздуха в иглу.
[00055] Чертежи не предназначены для ограничения никаким образом, и предполагается, что различные варианты осуществления технологии могут быть выполнены множеством различных других способов, включая способы, не обязательно отраженные на чертежах. Прилагаемые чертежи, включенные в описание и составляющие его часть, изображают несколько аспектов настоящей технологии и совместно с описанием служат для пояснения принципов технологии; однако, следует понимать, что настоящая технология не ограничена показанными схемами расположения.
ПОДРОБНОЕ ОПИСАНИЕ
[00056] Нижеприведенное описание некоторых примеров технологии нельзя использовать для ограничения ее объема. Другие примеры, признаки, аспекты, варианты осуществления и преимущества технологии станут очевидны специалистам в данной области техники из последующего описания, которое дает в качестве иллюстрации один из вариантов осуществления, представляющихся наилучшими для реализации технологии. Как будет ясно, технология, описанная в настоящей заявке, допускает другие отличающиеся и очевидные аспекты, не выходящие за пределы технологии. Соответственно, чертежи и описания следует рассматривать как иллюстративные по характеру и не ограничивающие.
[00057] Кроме того, само собой разумеется, что любой отдельно взятый или более из принципов, выражений, вариантов осуществления, примеров и т.д., приведенных в настоящей заявке, можно объединять с любым отдельно взятым или более из других принципов, выражений, вариантов осуществления, примеров и т.д., которые приведены в настоящей заявке. Поэтому, нижеописанные принципы, выражения, варианты осуществления, примеры и т.д. нельзя рассматривать отдельно друг от друга. С учетом принципов, изложенных в настоящей заявке, специалистам со средним уровнем компетентности в данной области техники будут очевидны различные подходящие способы, с помощью которых можно объединять принципы настоящего изобретения. Предполагается, что такие модификации и изменения не должны выходить за пределы объема охраны формулы изобретения.
[00058] Для ясности раскрытия, термины «проксимальный» и «дистальный» определяются в настоящей заявке относительно хирурга или другого оператора, держащего хирургический инструмент, имеющий дистальный хирургический рабочий орган. Термин «проксимальный» относится к положению элемента ближе к хирургу или другому оператору, и термин «дистальный» относится к положению элемента ближе к хирургическому рабочему органу хирургического инструмента и дальше от хирурга или другого оператора.
[00059] I. Примерный инструмент для субретинальной доставки терапевтического средства
[00060] Фиг. 1 представляет примерный инструмент (10), который предназначен для использования в процедуре для субретинальной доставки терапевтического средства в глаз пациента с супрахороидальным подходом. Инструмент (10) содержит корпус (20) и гибкую канюлю (50), продолжающуюся дистально из корпуса (20). Канюля (50) в настоящем примере имеет, в общем, прямоугольное сечение, однако, можно использовать любой другой подходящий профиль поперечного сечения (например, эллиптический и т.д.). Канюля (50) обычно выполнена с возможностью выполнения функции опоры для иглы (100), которая является подвижной внутри канюли (50), как подробно описано ниже.
[00061] В настоящем примере канюля (50) содержит гибкий материал, например, полиэфирблокамид (РЕВА), который может изготавливаться под торговым названием РЕВAX. Разумеется, можно применить любой другой подходящий материал или комбинацию материалов. Кроме того, в настоящем примере канюля (50) имеет размер профиля поперечного сечения, приблизительно, 2,0 мм на 0,8 мм и длину, приблизительно, 80 мм. В качестве альтернативы можно использовать любые другие подходящие размеры. Как подробно описано ниже, канюля (50) является достаточно гибкой для согласования с формами конкретных структур и контурами глаза пациента, при этом канюля (50) имеет достаточную жесткость, чтобы допускать выдвижение канюли (50) между склерой и сосудистой оболочкой глаза пациента, без выгибания. Только в виде примера, канюля (50) может быть выполненной и действующей в соответствии с, по меньшей мере, некоторыми из принципов, изложенных в публикации США № 2015/0223977, «Method and Apparatus for Subretinal Administration of Therapeutic Agent», опубликованной 13 августа 2015 г., раскрытие которой включено в настоящую заявку путем отсылки.
[00062] Как можно видеть на фиг. 2-3B и 6, канюля (50) содержит корпус (52), закрытый дистальный конец (54), и боковое отверстие (56), которое расположено проксимально относительно дистального конца (54). В настоящем примере дистальный конец (54) имеет закругленную конфигурацию. Следует понимать, что дистальный конец (54) может иметь кривизну любого подходящего типа. Следует также понимать, что дистальный конец (54) может иметь конфигурацию любого подходящего типа (например, со скошенной кромкой и т.д.). В настоящем примере дистальный конец (54) выполнен с возможностью обеспечения разделения между слоями склеры и сосудистой оболочки, чтобы канюлю (50) можно было вводить между данными слоями, без причинения травмы слоям склеры или сосудистой оболочки. Кроме того, в настоящем примере область корпуса (52), которая ограничивает боковое отверстие (56) имеет скошенную кромку, как лучше всего видно на фиг. 3A-3B. В качестве альтернативы, кромка бокового отверстия (56) может иметь любую другую подходящую конфигурацию.
[00063] Как лучше всего видно на фиг. 3A-3B, направляющий канал (60) иглы расположен внутри полой внутренней области канюли (50). Только в виде примера, направляющий канал (60) иглы может быть закреплен внутри канюли (50) посредством прессовой или тугой посадки, на клеях, посредством механических фиксирующих механизмов и/или любым другим подходящим способом. Направляющий канал (60) иглы включает в себя изогнутый дистальный конец (62), который ведет к боковому отверстию (56) канюли (50) таким образом, что просвет (64) направляющего канала (60) иглы заканчивается дистально на боковом отверстии (56). Участок направляющего канала (60) иглы, который проксимален относительно дистального конца (62) является, по существу, прямолинейным. Направляющий канал (60) иглы может быть сформирован из пластика, нержавеющей стали и/или любого(ых) другого(их) подходящего(их) биосовместимого(ых) материала(ов).
[00064] Игла (100) в настоящем примере имеет острый дистальный наконечник (102) и ограничивает просвет (104). Дистальный наконечник (102) в настоящем примере имеет ланцетную конфигурацию. В некоторых других исполнениях дистальный наконечник (102) имеет трехфасочную конфигурацию или любую другую конфигурацию, описанную в публикации США № 2015/0223977, «Method and Apparatus for Subretinal Administration of Therapeutic Agent», опубликованной 13 августа 2015 г., раскрытие которой включено в настоящую заявку путем отсылки. С учетом принципов, изложенных в настоящей заявке, специалистам со средним уровнем компетентности в данной области техники будут очевидны другие подходящие формы, которые может принимать дистальный наконечник (102). Игла (100) в настоящем примере содержит гиподермальную иглу из нержавеющей стали, которая выполнена в размер для доставки терапевтического средства, но является достаточно малой для минимизации случайной травмы, когда игла (100) проникает в тканевые структуры глаза пациента, как подробно описано ниже. Хотя в настоящем примере использована нержавеющая сталь, следует понимать, что можно применить любой(ые) другой(ие) подходящий(ие) материал(ы), включая, но без ограничения, нитинол и т.д.
[00065] Только в виде примера, игла (100) может иметь калибр 35G, с внутренним диаметром 100 мкм, хотя можно использовать другие подходящие размеры. Например, внешний диаметр иглы (100) может быть в пределах диапазона от калибра 27G до калибра 45G; или, конкретнее, в пределах диапазона от калибра 30G до калибра 42G; или, еще конкретнее, в пределах диапазона от калибра 32G до калибра 39G. В виде другого, всего лишь иллюстративного примера, внутренний диаметр иглы (100) может быть в пределах от приблизительно 50 мкм до приблизительно 200 мкм; или, конкретнее, в пределах от приблизительно 50 мкм до приблизительно 150 мкм; или, еще конкретнее, в пределах от приблизительно 75 мкм до приблизительно 125 мкм.
[00066] Игла (100) расположена с возможностью сдвига внутри просвета (64) направляющего канала (60) иглы. Направляющий канал (60) иглы, в общем, выполнен с возможностью направления иглы (100) вверх вдоль оси (EA) выхода, которая ориентирована наклонно к продольной оси (LA) канюли (50) через боковое отверстие (56) канюли (50). Это показано в последовательности, изображенной на фиг. 3A-3B, где фиг. ЗА представляет иглу (100) в проксимальном положении (в котором дистальный наконечник (102) иглы (100) полностью заключен в просвете (64) направляющего канала (60) иглы); и фиг. 3B представляет иглу (100) в дистальном положении (в котором дистальный наконечник (102) иглы (100) находится снаружи направляющего канала (60) иглы). Хотя игла (100) является гибкой, игла (100) в настоящем примере упруго отклоняется, чтобы принимать прямолинейную конфигурацию. Таким образом, как показано на фиг. 3B, участок иглы (100), который продолжается снаружи канюли (50) и направляющего канала (60) иглы, является, по существу, прямолинейным, продолжающимся вдоль оси (EA) выхода. В частности, по меньшей мере, значительная длина участка иглы (100), который продолжается снаружи канюли (50) и направляющего канала (60) иглы, коаксиально выставлен с осью (EA) выхода.
[00067] Следует понимать, что изображение оси (EA) выхода на фиг. 3A-3B может быть несколько преувеличено только с целью иллюстрации. В некоторых исполнениях изогнутый дистальный конец (62) выполнен с возможностью направления иглы (100) вдоль оси (EA) выхода, которая продолжается дистально от канюли (50) под углом от, приблизительно, 7° до, приблизительно, 9° относительно продольной оси (LA) канюли (50). Следует понимать, что такой угол может быть желательным для отклонения иглы (100) в направлении, обеспечивающем внедрение иглы в сосудистую оболочку и сведения к минимуму возможности продолжения иглы (100) под сосудистую оболочку сквозь супрахороидальное пространство (вместо прокалывания сосудистой оболочки) и возможности перфорации сетчатки. Только в виде дополнительного примера, изогнутый дистальный участок (88) может поджимать иглу (100) к выходу из канюли (50) вдоль оси (EA) выхода, которая ориентирована под углом в пределах от приблизительно 5° до приблизительно 30° относительно продольной оси (LA) канюли (50); или, конкретнее, в пределах от приблизительно 5° до приблизительно 20° относительно продольной оси (LA) канюли (50); или, еще конкретнее, в пределах от приблизительно 5° до приблизительно 10° относительно продольной оси (LA) канюли (50).
[00068] Как показано на фиг. 1, инструмент (10) в настоящем примере дополнительно содержит приводную головку (26), расположенную на проксимальном конце корпуса (20). Приводная головка (26) является поворотной относительно корпуса (20), чтобы, тем самым, избирательно поступательно перемещать иглу (100) в продольном направлении относительно канюли (50). В частности, приводная головка (26) является поворотной в первом угловом направлении, чтобы приводить в движение иглу (100) в дистальном направлении относительно канюли (50); и во втором угловом направлении, чтобы приводить в движение иглу (100) в проксимальном направлении относительно канюли (50). Только в виде примера, инструмент (10) может обеспечивать данные функции посредством головки (26) в соответствии с, по меньшей мере, некоторыми из принципов, изложенных в публикации США № 2015/0223977, «Method and Apparatus for Subretinal Administration of Therapeutic Agent», опубликованной 13 августа 2015 г., раскрытие которой включено в настоящую заявку путем отсылки. В качестве альтернативы, для привода иглы (100) в движение продольно относительно канюли (50) можно использовать приводное(ые) средство(а) любого другого подходящего типа.
[00069] В настоящем примере головка (26) является поворотной в полном диапазоне движения, который соответствует выдвижению иглы (100) относительно канюли (50) в положение до предварительно заданной глубины проникания внутрь глаза пациента. Другими словами, инструмент (10) выполнен так, что хирург вращает головку (26) до тех пор, пока головка (26) больше не может вращаться, или пока головка (26) не начинает проскальзывать или «свободно прокручиваться» в узле муфты, чтобы правильно позиционировать иглу (100) внутри глаза пациента. В некоторых примерах, предварительно заданная величина выдвижения иглы (100) относительно канюли (50) находится в пределах от приблизительно 0,25 мм до приблизительно 10 мм; или, конкретнее, в пределах от приблизительно 0,1 мм до приблизительно 10 мм; или, конкретнее, в пределах от приблизительно 2 мм до приблизительно 6 мм; или, конкретнее, приблизительно равна 4 мм.
[00070] Дополнительно или в качестве альтернативы, инструмент (10) может быть оборудован некоторыми средствами тактильной обратной связи, чтобы указывать хирургу, когда игла (100) выдвигается на некоторые предварительно заданные расстояния относительно канюли (50). Соответственно, хирург может определять искомую глубину проникновения иглы (100) в глаз пациента на основании визуального контроля знаков индикации на инструменте и/или на основании тактильного сигнала обратной связи из инструмента (10). Разумеется, данные средства тактильной обратной связи можно объединять с представленным примером, что будет очевидно специалистам со средним уровнем компетентности в данной области техники, с учетом принципов, изложенных в настоящей заявке.
[00071] Как также показано на фиг. 1, пара подводящих трубок (30, 40) продолжается в проксимальном направлении от приводной головки (26). В настоящем примере первая подводящая трубка (30) выполнена с возможностью соединения с источником текучей среды (340) для подушки (например, BSS (сбалансированного солевого раствора)); а вторая подводящая трубка (40) выполнена с возможностью соединения с источником терапевтического средства (341). Следует понимать, что каждая трубка (30, 40) подачи текучей среды может включать в себя обычное средство люэровского типа и/или другие конструкции, позволяющие соединять трубки (30, 40) подачи текучей среды с источниками соответствующих текучих сред. Трубки (30, 40) подачи текучей среды ведут к клапанному узлу, который включает в себя исполнительные рычаги (24). Исполнительные рычаги (24) выполнены с возможностью поворота, чтобы избирательно переключать состояние клапанного узла. Клапанный узел выполнен с возможностью избирательного пережатия или иного открывания/перекрытия подачи текучей среды из трубок (30, 40) подачи текучей среды в просвет (104) иглы (100), исходя из поворотного положения исполнительных рычагов (24). Таким образом, исполнительные рычаги (24) выполнены с возможностью избирательного управления доставкой текучей среды (340) для подушки и терапевтического средства (341) через иглу (100). Только в виде примера, клапанный узел может быть выполненным и действующим в соответствии с, по меньшей мере, некоторыми из принципов, изложенных в публикации США № 2015/0223977, «Method and Apparatus for Subretinal Administration of Therapeutic Agent», опубликованной 13 августа 2015 г., раскрытие которой включено в настоящую заявку путем отсылки. С учетом принципов, изложенных в настоящей заявке, специалистам со средним уровнем компетентности в данной области техники будут очевидны другие подходящие средства и конфигурации, которые можно применять для управления доставкой текучей среды через иглу (100).
[00072] Следует понимать, что функциональные средства и рабочие качества инструмента (10) можно изменять множеством способов. Кроме того, инструмент (10) можно модифицировать в соответствии с, по меньшей мере, некоторыми из принципов, изложенных в публикации США № 2015/0223977, «Method and Apparatus for Subretinal Administration of Therapeutic Agent», опубликованной 13 августа 2015 г., раскрытие которой включено в настоящую заявку путем отсылки; публикации США № 2015/0351958, «Therapeutic Agent Delivery Device with Convergent Lumen», опубликованной 10 декабря 2015 г., раскрытие которой включено в настоящую заявку путем отсылки; публикации США № 2015/0351959, «Sub-Retinal Tangential Needle Catheter Guide and Introducer», опубликованной 10 декабря 2015 г., раскрытие которой включено в настоящую заявку путем отсылки; публикации США № 2016/0074212, «Method and Apparatus for Sensing Position Between Layers of an Eye», опубликованной 17 марта 2016 г., раскрытие которой включено в настоящую заявку путем отсылки; публикации США № 2016/0074217, «Motorized Suprachoroidal Injection of Therapeutic Agent», опубликованной 17 марта 2016 г., раскрытие которой включено в настоящую заявку путем отсылки; публикации США № 2016/0074211, «Therapeutic Agent Delivery Device with Advanceable Cannula and Needle», опубликованной 17 марта 2016 г., раскрытие которой включено в настоящую заявку путем отсылки, и/или публикации США № 2016/0081849, «Therapeutic Agent Delivery Device», опубликованной 24 марта 2016 г., раскрытие которой включено в настоящую заявку путем отсылки. С учетом принципов, изложенных в настоящей заявке, специалистам со средним уровнем компетентности в данной области техники будут очевидны другие подходящие модификации.
[00073] II. Примерная процедура для субретинальной доставки терапевтического средства
[00074] Фиг. 4A-5C изображают примерную процедуру для субретинальной доставки терапевтического средства с супрахороидальный подходом, с использованием вышеописанного инструмента (10). Только в виде примера, способ, описанный в настоящей заявке, можно применить для лечения дегенерации желтого пятна и/или других глазных болезней. Хотя процедура, описанная в настоящей заявке, рассматривается в контексте лечения возрастной дегенерация желтого пятна, следует понимать, что никакого подобного ограничения не предусмотрено. Например, в некоторых, всего лишь примерных альтернативных процедурах, такие же методы, как описанные в настоящей заявке, можно использовать для лечения пигментного ретинита, диабетической ретинопатии и/или других глазных болезней. Дополнительно следует понимать, что процедуру, описанную в настоящей заявке, можно применять для лечения сухой или влажной дегенерации желтого пятна.
[00075] В настоящем примере процедура начинается хирургом посредством иммобилизации ткани, окружающей глаз (301) пациента (например, глазных век) с использованием векорасширителя и/или любого другого инструмента, пригодного для иммобилизации. Хотя в настоящей заявке описана иммобилизация со ссылкой на ткань, окружающую глаз (301), следует понимать, что сам глаз (301) может оставаться способным к перемещению. После того, как ткань, окружающая глаз (301), иммобилизована, в глаз (301) устанавливают осветительный порт (314) глаза, как показано на фиг. 4A, чтобы обеспечивать внутриглазную подсветку, когда внутреннюю поверхность глаза (301) наблюдают сквозь зрачок. В настоящем примере осветительный порт (314) глаза установлен в нижнем медиальном квадранте таким образом, что можно выполнять склеротомию в верхнем височном квадранте. Осветительный порт (314) глаза устанавливают с возможностью направления света на внутреннюю поверхность глаза (301), чтобы подсвечивать, по меньшей мере, участок сетчатки (например, включающий в себя, по меньшей мере, участок желтого пятна). Как будет понятно, такая подсветка соответствует области глаза (301), которая намечена для доставки терапевтического средства.
[00076] В настоящем примере, на стадии, изображенной на фиг. 4A, установлен только осветительный порт (314), еще без введения в порт (314) оптического волокна (315). В некоторых других исполнениях оптическое волокно (315) можно вставлять в осветительный порт (314) на данной стадии. В любом случае, можно дополнительно использовать микроскоп для визуального контроля глаза, чтобы удостовериться в правильном позиционировании осветительного порта (314) глаза относительно намеченного места. Хотя фиг. 4A показывает конкретное позиционирование осветительного порта (314) глаза, следует понимать, что осветительный порт (314) глаза может иметь любое другое положение, как должно быть понятно специалистам со средним уровнем компетентности в данной области техники, с учетом принципов, изложенных в настоящей заявке.
[00077] После того, как осветительный порт (314) глаза установлен, можно получить доступ к склере (304) посредством рассечения конъюнктивы путем иссечения лоскута в конъюнктиве и отведения назад лоскута. После того, как такое рассечение закончено, вскрытую поверхность (305) склеры (304) можно дополнительно прижечь с помощью термокаутера, чтобы минимизировать кровотечение. После того, как рассечение конъюнктивы закончено, вскрытую поверхность (305) склеры (304) можно дополнительно подсушить с использованием полосок WECK-CEL или другого подходящего впитывающего устройства. Затем можно использовать шаблон, чтобы разметить глаз (301), как описано в публикации США № 2015/0223977, «Method and Apparatus for Subretinal Administration of Терапевтическое средство», опубликованной 13 августа 2015 г., раскрытие которой включено в настоящую заявку путем отсылки. Затем хирург может воспользоваться визуальным указателем, созданным с помощью шаблона, чтобы закрепить составленную шовную петлю (332) и выполнить склеротомию, как показано на фиг. 4B, с использованием обычного скальпеля (313) или другого подходящего режущего инструмента. Процедура склеротомии формирует небольшой разрез сквозь склеру (304) глаза (301). Склеротомию выполняют с особым вниманием к тому, чтобы избежать прокалывания сосудистой оболочки (306). Таким образом, процедура склеротомии обеспечивает доступ к пространству между склерой (304) и сосудистой оболочкой (306). После того, как в глазу (301) сделан разрез (301), дополнительно можно выполнить расслоение, чтобы локально отделить склеру (304) от сосудистой оболочки (306). Такое расслоение можно выполнить с помощью небольшого тупого удлиненного инструмента, как должно быть очевидно специалистам со средним уровнем компетентности в данной области техники, с учетом принципов, изложенных в настоящей заявке.
[00078] После выполнения процедуры склеротомии, хирург может ввести канюлю (50) инструмента (10) через разрез (316) и в пространство между склерой (304) и сосудистой оболочкой (306). Как можно видеть на фиг. 4C, канюлю (50) направляют через составленную шовную петлю (332) и в разрез. Составленная шовная петля (332) может стабилизировать канюлю (50) во время введения. Кроме того, составленная шовная петля (332) поддерживает канюлю (50) в положении с ориентацией, в общем, по касательной относительно разреза. Такая касательная ориентация может уменьшить травму, когда канюлю (50) проводят через разрез. Когда канюлю (50) вводят в разрез через составленную шовную петлю (332), хирург может использовать пинцет или другие инструменты, чтобы провести канюлю (50) дальше по атравматическому пути. Разумеется, использование щипцов или других инструментов не обязательно, и в некоторых примерах можно обойтись без них.
[00079] Хотя и не показано, следует понимать, что, в некоторых примерах, канюля (50) может содержать одну или более меток на поверхности канюли (50), чтобы указывать различные длины введения. Данные метки, хотя и не обязательны, могут быть желательными для помощи хирургу при определении надлежащей глубины введения, когда канюлю (50) проводят по атравматическому пути. Например, хирург может визуально наблюдать положение таких меток относительно составленной шовной петли (332) и/или относительно разреза в склере (304) в качестве показания глубины, на которую канюлю (50) вводят в глаз (301). Только в виде примера, одна такая метка может соответствовать, приблизительно, 6-мм глубине введения канюли (50).
[00080] Как показано на фиг. 4D, после того, как канюля (50), по меньшей мере, частично введена в глаз (301), хирург может вставить оптическое волокно (315) в осветительный порт (314) глаза, если волокно (315) еще не вставлено на данной стадии. В состоянии, когда осветительный порт (314) глаза находится на заданном месте и собран с оптическим волокном (315), хирург может активировать осветительный порт (314) глаза посредством направления света по оптическому волокну (315), чтобы обеспечить подсветку глаза (301) и, тем самым, визуализировать внутреннюю поверхность глаза (301). В данный момент можно выполнить дополнительные регулировки положения канюли (50), чтобы обеспечить правильное позиционирование области географической атрофии сетчатки (308), В некоторых случаях, хирург может захотеть повернуть глаз (301), например, путем натяжения составленной шовной петли (332), чтобы направить зрачок глаза (301) в направлении хирурга для того, чтобы оптимизировать визуальный контроль внутренней поверхности глаза (301) через зрачок.
[00081] Фиг. 4C-4D изображают канюлю (50), когда ее проводят между склерой (304) и сосудистой оболочкой (306) к месту доставки терапевтического средства. В настоящем примере место доставки соответствует, в общем, задней области глаза (301) вблизи области географической атрофии сетчатки (308). В частности, место доставки в настоящем примере находится выше желтого пятна, в возможном пространстве между нейросенсорным слоем сетчатки и слоем пигментного эпителия сетчатки. Только в виде примера, хирург может полагаться на визуальный контроль под микроскопом, направленным сквозь зрачок глаза (301), когда канюлю (50) выдвигают на полный диапазон перемещения, показанный на фиг. 4C-4D, при обеспечении подсветки посредством волокна (315) и через порт (314). Канюля (50) может быть, по меньшей мере, частично видимой сквозь сетчатку (308) и сосудистую оболочку (306) глаза (301). Визуальное слежение можно усовершенствовать в исполнениях, в которых оптическое волокно используют для испускания видимого света через дистальный конец канюли (50).
[00082] После того, как канюлю (50) выдвинули к месту доставки, как показано на фиг. 4D, хирург может выдвинуть иглу (100) инструмента (10), как описано выше, посредством приведения в движение головки (26). Как можно видеть на фиг. 4E и 5A, иглу (100) выдвигают относительно канюли (50) таким образом, что игла (100) прокалывает сосудистую оболочку (306), но не проникает в сетчатку (308). Непосредственно перед прокалыванием сосудистой оболочки (306), игла (100) может представляться под визуальным контролем в виде «шатровидной деформации» поверхности сосудистой оболочки (306). Другими словами, игла (100) может деформировать сосудистую оболочку (306) путем отжимания вверх сосудистой оболочки (306), что создает вид, подобный деформации крыши шатра от шеста шатра. Такой визуальный признак может служить хирургу для идентификации, наступает ли момент прокалывания сосудистой оболочки (306), и местоположения любого возможного прокалывания. Конкретная длина выдвижения иглы (100), достаточная для начала «шатровидной деформации» и последующего прокалывания сосудистой оболочки (306), может быть любой подходящей длиной, которая может определяться рядом факторов, например, но без ограничения, общей анатомией пациента, локальной анатомией пациента, предпочтением хирурга и/или другими факторами. Как описано выше, всего лишь примерный диапазон выдвижения иглы (100) может быть от приблизительно 0,25 мм до приблизительно 10 мм; или, конкретнее, от приблизительно 2 мм до приблизительно 6 мм.
[00083] В настоящем примере, после того, как хирург убедился, что игла (100) выдвинута правильно, по визуальной картине вышеописанного эффекта шатровидной деформации, хирург производит инфузию сбалансированного солевого раствора (BSS) или другого подобного раствора по мере того, как выдвигает иглу (100) относительно канюли (50). Данный BSS может формировать вводную подушку (340) впереди иглы (100) по мере того, как иглу (100) выдвигают сквозь сосудистую оболочку (306). Вводная подушка (340) может требоваться по двум причинам. Во-первых, как показано на фиг. 4F и 5B, вводная подушка (340) может предоставлять хирургу дополнительный визуальный признак для указания, когда игла (100) правильно позиционирована в месте доставки. Во-вторых, вводная подушка (340) может создавать барьер между иглой (100) и сетчаткой (308) после того, как игла (100) прошла сквозь сосудистую оболочку (306). Такой барьер может отталкивать стенку сетчатки наружу, что минимизирует риск перфорации сетчатки, когда иглу (100) выдвигают к месту доставки. В некоторых исполнениях, чтобы нагнетать вводную подушку (340) из иглы (100), приводят в действие ножную педаль. С учетом принципов, изложенных в настоящей заявке, специалистам со средним уровнем компетентности в данной области техники будут очевидны, в качестве альтернативы, другие подходящие средства, которые можно применить для нагнетания вводной подушка (340) из иглы (100).
[00084] Как только хирург сделает видимой вводную подушку (340), хирург может прекратить инфузию BSS, которая оставляет на месте пузырь текучей среды, как можно видеть на фиг. 4F и 5B. Затем, можно произвести инфузию терапевтического средства (341) посредством приведения в действие шприца или другого устройства доставки текучей среды, как описано в различных ссылках, приведенных в настоящей заявке. Конкретное доставляемое терапевтическое средство (341) может быть любым подходящим терапевтическим средством, предназначенным для лечения глазной болезни. Некоторые, всего лишь примерные подходящие терапевтические средства могут включать в себя, но без обязательного ограничения, лекарства, содержащие малые или большие молекулы, терапевтические растворы, содержащие клетки, растворы некоторых генотерапевтических препаратов, тканевые активаторы плазминогенов и/или любое другое подходящее терапевтическое средство, которое будет очевидно для специалистов со средним уровнем компетентности в данной области техники, с учетом принципов, изложенных в настоящей заявке. Только в виде примера, терапевтическое средство (341) можно обеспечивать в соответствии с, по меньшей мере, некоторыми из принципов патента США № 7,413,734, «Treatment of Retinitis Pigmentosa with Human Umbilical Cord Cells», выданного 19 августа 2008 г., раскрытие которого включено в настоящую заявку путем отсылки. Дополнительно или в качестве альтернативы применения для доставки терапевтического средства (341), инструмент (10) и его варианты можно применять для обеспечения дренажа и/или выполнения других операций.
[00085] В настоящем примере количество терапевтического средства (341), которое, в конечном счете, доставляют в место доставки, равно приблизительно 50 мкл, хотя возможна доставка любого другого подходящего количества. В некоторых исполнениях, для нагнетания терапевтического средства (341) из иглы (100) действуют ножной педалью. С учетом принципов, изложенных в настоящей заявке, специалистам со средним уровнем компетентности в данной области техники будут очевидны, в качестве альтернативы, другие подходящие средства, которые можно использовать для нагнетания терапевтического средства (341) из иглы (100). Доставка терапевтического средства (341) может визуально проявляться благодаря расширению пузыря текучей среды, как можно видеть на фиг. 4G и 5C. Как показано, терапевтическое средство (341), по существу, смешивается с текучей средой вводной подушки (340), когда терапевтическое средство (341) вводят в супрахороидальное, субретинальное пространство.
[00086] После того, как доставка выполнена, иглу (100) можно отвести вращением головки (26) в направлении, противоположном направлению вращения для выдвижения иглы (100); и затем канюлю (50) можно извлечь из глаза (301). Следует понимать, что, из-за размера иглы (100), место, в котором игла (100) прошла сквозь сосудистую оболочку (306), является самоуплотняющимся, так что никаких дополнительных этапов для изоляции места доставки сквозь сосудистую оболочку (306) не требуется. Составленную шовную петлю (332) и осветительный порт (314) можно удалить, и разрез в склере (304) можно закрыть с использованием любых подходящих обычных методов.
[00087] Как замечено выше, приведенную процедуру можно выполнять для лечения пациента, страдающего дегенерацией желтого пятна. В некоторых подобных случаях, терапевтическое средство (341), которое доставляется иглой (100), может содержать клетки, которые получены из послеродовой пуповины и плаценты. Как замечено выше, и только в виде примера, терапевтическое средство (341) может быть обеспечено в соответствии с, по меньшей мере, некоторыми из принципов патента США № 7,413,734, «Treatment of Retinitis Pigmentosa with Human Umbilical Cord Cells», выданного 19 августа 2008 г., раскрытие которого включено в настоящую заявку путем отсылки. В качестве альтернативы, иглу (100) можно использовать для доставки любого(ых) другого(их) подходящего(их) вещества или веществ, дополнительно или вместо тех, которые описаны в патенте США № 7,413,734 и/или в другом месте настоящей заявки. Только в виде примера, терапевтическое средство (341) может содержать различные виды лекарств, включая, но без ограничения, малые молекулы, большие молекулы, клетки и/или генотерапевтические препараты. Следует также понимать, что дегенерация желтого пятна является только одним, всего лишь наглядным примером заболевания, которое можно лечить посредством процедуры, описанной в настоящей заявке. Специалистам со средним уровнем компетентности в данной области техники будут очевидны другие биологические заболевания, которые можно лечить с использованием инструментов и процедур, описанных в настоящей заявке.
[00088] Следует также понимать, что вышеописанную процедуру можно выполнять в соответствии с любым из принципов публикации США № 2015/0223977, «Method and Apparatus for Subretinal Administration of Therapeutic Agent», опубликованной 13 августа 2015 г., раскрытие которой включено в настоящую заявку путем отсылки; публикации США № 2015/0351958, «Therapeutic Agent Delivery Device with Convergent Lumen», опубликованной 10 декабря 2015 г., раскрытие которой включено в настоящую заявку путем отсылки; публикации США № 2015/0351959, «Sub-Retinal Tangential Needle Catheter Guide and Introducer», опубликованной 10 декабря 2015 г., раскрытие которой включено в настоящую заявку путем отсылки; публикации США № 2016/0074212, «Method and Apparatus for Sensing Position Between Layers of an Eye», опубликованной 17 марта 2016 г., раскрытие которой включено в настоящую заявку путем отсылки; публикации США № 2016/0074217, «Motorized Suprachoroidal Injection of Therapeutic Agent», опубликованной 17 марта 2016 г., раскрытие которой включено в настоящую заявку путем отсылки; публикации США № 2016/0074211, «Therapeutic Agent Delivery Device with Advanceable Cannula and Needle», опубликованной 17 марта 2016 г., раскрытие которой включено в настоящую заявку путем отсылки; и/или публикации США № 2016/0081849, «Therapeutic Agent Delivery Device», опубликованной 24 марта 2016 г., раскрытие которой включено в настоящую заявку путем отсылки.
[00089] III. Примерная инъекторная система с дистанционным управлением
[00090] В некоторых исполнениях процедуры, описанной выше со ссылкой на фиг. 4A-4G и 5A-5C, пациент может быть в сознании и под местной анестезией. В таких случаях существует риск перемещения пациента. Упомянутое перемещение пациента, когда канюля (50) расположена в глазу (301), может привести к повреждению глаза. Кроме того, применение инструмента (10) требует ручной манипуляции исполнительными рычагами (24) и приводной головкой (26). Упомянутые средства ручного управления могут создавать риск ненамеренного перемещения канюли (50) внутри глаза (301). Кроме того, возможно затруднение с устойчивым обеспечением точного введения текучей среды (340) для подушки и терапевтическое средство (341). Поэтому может быть желательно снижать риски, связанные с перемещением пациента, снижать риск ненамеренного перемещения компонентов, которые располагаются в глазу (301) и повышать постоянство точного введения текучей среды (340) для подушки и терапевтического средства (341).
[00091] Фиг. 6 представляет примерную систему (400), которую можно применять для доставки текучей среды (340) для подушки и терапевтического средства (341) в глаз (301) пациента. Система (400) в данном примере включает в себя модуль (500) управления, приводной узел (600) инъектора и инъекторный узел (700). Кассета (550) привода в действие шприца располагается в модуле (500) управления и соединена набором (420) трубок с приводным узлом (600) инъектора. Кассета (550) привода в действие шприца подсоединена также трубкой (412) к бутылке (410) со сбалансированным солевым раствором (BSS). Инъекторный узел (700) соединен с приводным узлом (600) инъектора жгутом (690) трубок с тросиком. Каждый из приведенных компонентов подробно описан в дальнейшем.
[00092] Фиг. 7 представляет компоненты системы (400), размещенной относительно пациента. В данном примере простыня (452) покрывает пациента, при этом в простыне (452) выполнено отверстие (454) около глаза (301) пациента. Расширитель (440) служит для удерживания глаза (301) в открытом состоянии. Зажимное приспособление (450) расположено вблизи глаза (301). Зажимное приспособление (450) можно использовать для закрепления контрольно-измерительных приборов, например, наблюдательного оптического прибора, относительно пациента. Магнитная опора (460) приклеивают к простыне (452) вблизи отверстия (454) около глаза (301). Инъекторный узел (700) размещен на магнитной опоре (460) и съемно закреплен к ней посредством сил магнитного притяжения, как подробно описано в дальнейшем. Инъекторный узел (700) ориентирован с возможностью допуска введения гибкой канюли (702) инъекторного узла (700) в глаз (301). Приводной узел (600) инъектора съемно прикреплен к опоре (456) для запястий посредством рычагов (606). Приводной узел (600) инъектора расположен достаточно близко к инъекторному узлу (700), чтобы обеспечивать некоторую слабину жгута (690) трубок с тросиком. Хотя на фиг. 7 и не показано, приводной узел (600) инъектора соединен с модулем (500) управления через кассету (550) привода в действие шприца и набор (420) трубок.
[00093] Модуль (500) управления в настоящем примере конструктивно выполнен и действует в соответствии с принципами патентной заявки США № [ATTORNEY DOCKET NO. END8063USNP.0648024], «Injection Device for Subretinal Delivery of Therapeutic Agent», поданной на дату подачи настоящей заявки, раскрытие которой включено в настоящую заявку путем отсылки. Кассета (550) привода в действие шприца также конструктивно выполнен и действует в соответствии с принципами патентной заявки США № [ATTORNEY DOCKET NO. END8063USNP.0648024]. Как описано в настоящей заявке, модуль (500) управления и кассета (550) привода в действие шприца выполняют функцию автоматического дозирования текучей среды (340) для подушки и терапевтического средства (341) в приводной узел (600) инъектора и инъекторный узел (700) по набору (420) трубок. Магнитная опора (460) может быть также конструктивно выполнена и действовать в соответствии с принципами патентной заявки США № [ATTORNEY DOCKET NO. END8063USNP.0648024].
[00094] Фиг. 8 изображает приводной узел (600) инъектора, соединенный с инъекторным узлом (700) жгутом (690) трубок с тросиком. Как показано на фиг. 8, трубки (422, 424) и электрический кабель в составе набора (420) трубок входят в проксимальный конец приводного узла (600) инъектора. Трубка (422) выполнена с возможностью переноса текучей среды (340) для подушки из бутылки (410) с BSS; а трубка (424) выполнена с возможностью переноса терапевтического средства из шприца, заключенного в кассеты (550) привода в действие шприца. Трубки (422, 424) проходят через приводной узел (600) инъектора и выходят из дистального конца приводного узла (600) инъектора в составе жгута (690) трубок с тросиком. Трубки (422, 424) входят в составе жгута (690) трубок с тросиком в проксимальный конец инъекторного узла (700). Жгут (690) трубок с тросиком включает в себя также тросик (692) механизма тянуще-толкающего типа, который выполнен с возможностью передачи продольного перемещения от приводного узла (600) инъектора инъекторному узлу (700), как подробно описано в дальнейшем. Жгут (690) трубок с тросиком включает в себя также внешнюю оболочку (694). Внешняя оболочка (694) выполнена с возможностью вмещения трубок (422, 424) и тросика (692) механизма тянуще-толкающего типа. Внешняя оболочка (694) выполнена также с возможностью функционирования в качестве продольной механического основания для тросика (692) механизма тянуще-толкающего типа, чтобы тросик (692) механизма тянуще-толкающего типа поступательно перемещался относительно внешней оболочки (694).
[00095] Как показано на фиг. 8, инъекторный узел (700) в настоящем примере содержит пару полукорпусов (704), с канюлей (702), продолжающейся в дистальном направлении от них. Канбля (702) может быть конструктивно выполнена и действовать как вышеописанная канюля (50). Игла (не показанная) расположена с возможностью сдвига в канюле (702). Данная игла может быть конструктивно выполнена и действовать как вышеописанная игла (100). Проксимальный конец иглы закреплен к приводу (не показанному), который расположен с возможностью сдвига в полукорпусах (704). Привод также закреплен к тросику (692) механизма тянуще-толкающего типа. Таким образом, когда приводной узел (600) инъектора приводит в продольное движение тросик (692) механизма тянуще-толкающего типа, игла инъекторного узла (700) будет соответственно поступательно перемещаться относительно канюля (702). Только в виде примера, инъекторный узел (700) может быть конструктивно выполнен и действовать в соответствии с принципами патентной заявки США № [ATTORNEY DOCKET NO. END8063USNP.0648024].
[00096] Фиг. 9-17B подробно представляют приводной узел (600) инъектора и его компоненты. Хотя на фиг. 9-17B не показаны трубки (422, 424), следует понимать, что трубки (422, 424) проходят через приводной узел (600) инъектора как отмечалось выше. Как показано, приводной узел (600) инъектора в настоящем примере содержит головку (602), кнопку (604), корпус (610) и верхнюю качающуюся пластину (612). Два рычага (606) соединены с возможностью поворота с корпусом (610) и выполнены с возможностью закрепления приводного узла (600) инъектора к опоре (456) для запястий, как отмечалось выше. Приводной узел (600) инъектора может включать в себя один или более упругих элементов (например, торсионных пружин, пластинчатых пружине и т.п.), чтобы упруго поджимать рычаги (606) друг к другу и, тем самым, вынуждать рычаги (606) захватывать опору (456) для запястий.
[00097] Головка (402), кнопка (604) кулисного типа, пластина (612) и корпус (610) выполнены с возможностью взаимодействия для вмещения нескольких внутренних компонентов внутри приводного узла (600) инъектора. Как показано на фиг. 9, данные внутренние компоненты включают в себя матрицу цветных программируемых СИД (светодиодов) (622) и первый сенсорный переключатель (624), и все данные компоненты смонтированы на дискообразной плите (620). Внутренние компоненты дополнительно включают в себя кольцевую раму (626), вращающийся кулачковый элемент (640), приводимый кулачком элемент (650), набор (628) цилиндрических пружин и набор (630) шарикоподшипников. Головка (402), кнопка (604) и кулачковый элемент (640) соединены друг с другом так, что головка (402), кнопка (604) и кулачковый элемент (640) могут поворачиваться относительно других компонентов приводного узла (600) инъектора.
[00098] Кнопка (604) выполнена с возможностью вертикального возвратно-поступательного движения внутри головки (402). Стержень (605) (фиг. 9) выступает вниз от нижней стороны стержня (605) и выполнен с возможностью включения сенсорного переключателя (624), когда кнопку (604) нажимают вниз относительно головки (402). Сенсорный переключатель (624) связан с модулем (500) управления электрическим кабелем (426). В настоящем примере, модуль (500) управления выполнен с возможностью запуска дозирования терапевтического средства (341) по трубке (422) в ответ на включение сенсорного переключателя (624) посредством кнопки (604). В некоторых других исполнениях модуль (500) управления выполнен с возможностью запуска дозирования текучей среды (340) для подушки по трубке (424) в ответ на включение сенсорного переключателя (624) посредством кнопки (604).
[00099] СИД (622) выполнены с возможностью избирательного свечения. Головка (402) и кнопка (604) выполнены с возможностью предоставления возможности наблюдения света, испускаемого СИД (622). СИД (622) могут светиться различным образом, исходя из конкретного состояния системы (400). Например, СИД (622) могут светиться красным светом, когда система (400) не готова для приведения в действие кнопки (604); и зеленым светом, когда система (400) готова для приведения в действие кнопки (604). В другом, исключительно иллюстративном примере, СИД (622) могут светиться зеленым светом, когда игла инъекторного узла (700) находится в полностью проксимальном, отведенном положении; желтым светом, когда игла инъекторного узла (700) находится в промежуточном положении, но еще не выдвинута из канюли (702); и фиолетовым светом, когда игла инъекторного узла (700) находится в дистально выдвинутом положении, в котором игла инъекторного узла (700) выступает из канюли (702). С учетом принципов, изложенных в настоящей заявке, специалистам со средним уровнем компетентности в данной области техники будут очевидны другие подходящие способы, по которым можно использовать СИД (622).
[000100] Как показано на фиг. 10, другой сенсорный переключатель (632) расположен внутри корпуса (610). Сенсорный переключатель (632) выполнен с возможностью включения верхней качающейся пластиной (612), как подробно описано в дальнейшем. Также внутри корпуса (610) расположен линейный датчик (660). Линейный датчик (660) выполнен с возможностью приведения в действие приводимым кулачком элементом (650), как подробно описано в дальнейшем. Как сенсорный переключатель (632), так и линейный датчик (660) связаны с модулем (500) управления электрическим кабелем (426).
[000101] Фиг. 11 представляет качающуюся пластину (612) более детально. Как показано, качающаяся пластина (612) содержит пару выступающих вниз лапок (614) и выступающий вниз стержень (618). Лапки (614) закруглены и выполнены с возможностью вставки в ответные углубления (616) (фиг. 10) корпуса (610). Данная конфигурация лапок (614) и углублений (616) допускает качание качающейся пластины (612) таким образом, чтобы давать возможность стержню (618) избирательно включать сенсорный переключатель (632). В настоящем примере модуль (500) управления выполнен с возможностью запуска дозирования текучей среды (340) для подушки по трубке (422) в ответ на включение сенсорного переключателя (632) посредством качающейся пластины (612). В некоторых других исполнениях модуль (500) управления выполнен с возможностью запуска дозирования терапевтического средства (341) по трубке (424) в ответ на включение сенсорного переключателя (632) посредством качающейся пластины (612).
[000102] Фиг. 12-13 изображают вращающийся кулачок (640) более детально. Как показано на фиг. 12, верхняя сторона вращающегося кулачка (640) включает в себя кольцевую группу зубьев (642), расположенных как лучи звезды. Зубья (642) выполнены с возможностью зацепления шарикоподшипников (630). Верхний конец каждой цилиндрической пружины (628) упирается в нижнюю поверхность кольцевой рамы (626), которая служит механическим основанием. Нижний конец каждой пружины контактирует с соответствующим шарикоподшипником (630) и, тем самым, упруго поджимает шарикоподшипники (630) в зацепление с зубьями (642). Относительно расположение шарикоподшипников (630) и зубьев (642) обеспечивает достаточное сопротивление вращению головки (602) и вращающегося кулачка (640), чтобы не допускать непреднамеренного поворота головки (602) и вращающегося кулачка (640); но все еще допускает преднамеренное вращение головки (602) и вращающегося кулачка (640). Сопротивление, создаваемое шарикоподшипниками (630) и зубьями (642), может также позволить хирургу достигать более высокой степени точности при вращении головки (602), чем хирург мог быть достичь в ином случае, при отсутствии такого сопротивления. С учетом принципов, изложенных в настоящей заявке, специалистам со средним уровнем компетентности в данной области техники будут очевидны конструкции других подходящих типов, которые можно использовать вместо цилиндрических пружин (628), шарикоподшипников (630) и зубьев (642).
[000103] Как показано на фиг. 13, нижняя сторона вращающегося кулачка (640) содержит первый спиральный кулачковый элемент (644) и второй спиральный кулачковый элемент (646). Хотя спиральные кулачковые элементы (644, 646) расположены, в общем, вокруг радиального центра вращающегося кулачка (640), спиральные кулачковые элементы (644, 646) смещены от радиального центра вращающегося кулачка (640) и друг от друга.
[000104] Как показано на фиг. 14, приводимый кулачком элемент (650) в настоящем примере содержит первое выступающее вверх кулачковое ребро (652) и второе выступающее вверх кулачковое ребро (654). Проксимальный конец тросика (692) механизма тянуще-толкающего типа жестко закреплен к приводимому кулачком элементу (650). Кулачковые ребра (652, 654), каждое имеет контуры, ответные контурам спиральных кулачковых элементов (644, 646). Как показано на фиг. 15, кулачковое ребро (652) выполнено с возможностью вставки в первое пространство между спиральными кулачковыми элементами (644, 646); и кулачковое ребро (654) выполнено с возможностью вставки во второе пространство между спиральными кулачковыми элементами (644, 646).
[000105] Благодаря зацеплению между кулачковыми ребрами (652, 654) и спиральными кулачковыми элементами (644, 646), вращение вращающегося кулачка (640) будет вынуждать приводимый кулачком элемент (650) поступательно перемещаться в продольном направлении вдоль продольной оси тросика (692) механизма тянуще-толкающего типа. Такое поступательное перемещение показано на фиг. 16A-16B. Как показано на фиг. 16A-16B, приводимый кулачком элемент (650) захвачен между составляющими набор выступами (611), которые являются элементами, не разъемными с корпусом (610). Выступы (611) выполнены с возможностью направления и боковой поддержки приводимого кулачком элемента (650), когда приводимый кулачком элемент (650) поступательно перемещается между проксимальным положением (фиг. 16A) и дистальным положением (фиг. 16B). Как отмечалось выше, тросик (692) механизма тянуще-толкающего типа жестко закреплен к приводимому кулачком элементу (650). Тросик (692) механизма тянуще-толкающего типа также жестко закреплен к приводу (710) иглы, который дополнительно жестко закреплен к игле инъекторного узла (700). Поэтому следует понимать, что игла инъекторного узла (700) будет поступательно перемещаться в дистальном и проксимальном направлениях относительно канюли (702) в ответ на вращение головки (602) относительно корпуса (610).
[000106] Вращающийся кулачок (640) и приводимый кулачком элемент (650) являются всего лишь примерами средств, которые можно применить для привода тросика (692) механизма тянуще-толкающего типа в движение в продольном направлении. Только в виде примера, альтернативный приводной узел может включать в себя тросик механизма тянущего типа с реверсиным приводным шкивом (например, внутри инъекторного узла (700)). Только в виде дополнительного примера, альтернативный приводной узел может включать в себя электрический шнур в жгуте (690) трубок с тросиком; и микроэлектродвигатель внутри инъекторного узла (700). Только в виде дополнительного примера, альтернативный приводной узел может включать в себя электрический шнур в жгуте (690) трубок с тросиком; и наномышцу из нитиноловой проволоки внутри инъекторного узла (700). Только в виде дополнительного примера, альтернативный приводной узел может включать в себя динию гидропривода в жгуте (690) трубок с тросиком; и гидроцилиндр в инъекторном узле (700), чтобы обеспечить узел гидропривода с пружинным возвратом.
[000107] Нижняя сторона приводимого кулачком элемента (650) закреплена к ползунку (664) линейного датчика (660). Ползунок (664) выполнен с возможностью продольного поступательного перемещения относительно корпуса (662) линейного датчика (660). Поскольку приводимый кулачком элемент (650) закреплен к ползунку (664), то ползунок (664) будет находиться в проксимальном положении (фиг. 17A), когда приводимый кулачком элемент (650) будет находиться в проксимальном положении (фиг. 16A); и ползунок (664) будет находиться в дистальном положении (фиг. 17B), когда приводимый кулачком элемент (650) будет находиться в дистальном положении (фиг. 16B). Линейный датчик (660) выполнен с возможностью формирования переменного отсчетного значения, исходя из продольного положения ползунка (664) вдоль корпуса (662). Только в виде примера, линейный датчик (660) может содержать линейный потенциометр, который формирует переменное значение сопротивления, исходя из продольного положения ползунка (664) вдоль корпуса (662). Таким образом, значение сопротивления, сформированное линейным датчиком (660) будет характеризовать продольное положение иглы инъекторного узла (700) относительно канюли (702). Только в виде дополнительного примера, линейный датчик (660) может содержать датчик, который измеряет вращение головки (602), оптической датчик или датчик, расположенный в инъекторном узле (700), чтобы непосредственно контролировать перемещение привода (710) иглы. С учетом принципов, изложенных в настоящей заявке, специалистам со средним уровнем компетентности в данной области техники будут очевидны различные другие подходящие способы, с помощью которых можно измерять перемещение иглы инъекторного узла (700).
[000108] Поскольку линейный датчик (660) связан с модулем (500) управления, модуль (500) управления может управлять подачей текучей среды (340) для подушки и/или терапевтическим средством (341) по трубкам (422, 424), исходя из продольного положения иглы инъекторного узла (700) относительно канюли (702), измеренного линейным датчиком (660). В настоящем примере, когда линейный датчик (660) обнаружит дистальное выдвижение иглы инъекторного узла (700), соответствующий сигнал, посылаемый в модуль (500) управления, автоматически включит подачу текучей среды (340) для подушки. Это гарантирует, что текучая среда (340) для подушки будет вытекать через дистальный кончик иглы инъекторного узла (700) единообразно каждый раз, когда выдвигают иглу инъекторного узла (700). Посредством обеспечения такого истечения текучей среды (340) для подушки в единообразном режиме, система (400) может минимизировать риск случайного прокалывания сетчатки (308).
[000109] В некоторых исполнениях модуль (500) управления запрограммирован так, чтобы текучая среда (340) для подушки автоматически доставлялась с предварительно заданным расходом, исходя из выдвижения иглы инъекторного узла (700), измеренного линейным датчиком (660). Даже в случаях, когда доставка текучей среды (340) для подушки автоматизирована, модуль (500) управления еще может отвечать за включение сенсорного переключателя (632), чтобы доставлять дополнительную текучую среду (340) для подушки с предварительно заданным расходом, независимо от продольного положения иглы инъекторного узла (700). Следует также понимать, что доставка терапевтического средства (341) может обеспечиваться модулем (500) управления также с предварительно заданным расходом, чтобы доставлять предварительно заданный объем, в ответ на включение сенсорного переключателя (624). Кроме того, доставка терапевтического средства (341) может быть полностью автоматической, как только хирург включит сенсорный переключатель (624) кнопкой (604). Другими словами, хирург может быть и не в состоянии избирательно остановить (и, возможно, перезапустить) доставку терапевтического средства (341) после того, как хирург включил сенсорный переключатель (624). Таким образом, время, в течение которого нажимают кнопку (604), или повторное нажатие и отпускание кнопки и т.п. могу и не влиять на доставку терапевтического средства (341) после того, как хирург включил сенсорный переключатель (624). Другие примеры способов, в соответствии с которыми доставка текучей среды (340) для подушки и/или терапевтического средства (341) может обеспечиваться автоматически, исходя из измеренного положения иглы инъекторного узла (700), подробно описаны ниже.
[000110] В примере применения хирург может расположить магнитную опору (460), приводной узел (600) инъектора и инъекторный узел (700), как показано на фиг. 7. Затем хирург может сформировать склеротомию в глазу (301) пациента и ввести канюлю (702) в глаз (301) через склеротомию. Для поддержки формирования склеротомии, хирург может воспользоваться разметочным инструментом, описанным в патентной заявке США № [ATTORNEY DOCKET NO. END8062USNP.0648021], раскрытие которой включено в настоящую заявку путем отсылки. Для поддержки введения канюли (702) в склеротомию вдоль, по существу, касательного пути, хирург может использовать направляющее крепление, описанное в патентной заявке США №. [ATTORNEY DOCKET NO. END8062USNP.0648021], раскрытие которой включено в настоящую заявку путем отсылки. В качестве другой, лишь наглядной альтернативы, хирург может использовать составленную шовную петлю (332). В таком случае, канюлю (702) можно выдвигать в заданное положение, как показано на фиг. 4C-4D со ссылкой на канюлю (50).
[000111] С канюлей (702), расположенной, как показано на фиг. 4C-4D со ссылкой на канюлю (50), хирург может вращать головку (602), чтобы продвинуть иглу инъекторного узла (700) в дистальном направлении, как показано на фиг. 4E и 5A со ссылкой на иглу (100). Во время такого выдвижения иглы инъекторного узла (700), модуль (500) управления будет автоматически доставлять текучую среду (340) для подушки через иглу инъекторного узла (700) по сигналу из линейного датчика (660), что приводит, в итоге, к конфигурации, подобной той, которая показана на фиг. 4G и 5B. После того, как игла инъекторного узла (700) достаточно выдвинута, хирург нажимает кнопку (604). Это предписывает модулю (500) управления доставлять терапевтическое средство (341) через иглу инъекторного узла (700), что приводит, в итоге, к конфигурации, подобной той, которая показана на фиг. 4H и 5C. Затем хирург вращает головку (602) в обратном направлении, чтобы отвести иглу инъекторного узла (700) обратно в канюлю (702). После отведения иглы инъекторного узла (700), хирург выводит канюлю (702) из глаза (301) и надежно закрывает склеротомию с использованием любого подходящего метода.
[000112] IV. Примерный инъекторный узел со встроенным управлением
[000113] Хотя сочетание приводного узла (600) инъектора, инъекторного узла (700) и тросика (692) механизма тянуще-толкающего типа может повысить степень безопасности, точности и единообразия доставки терапевтического средства (341) в глаз (301), может быть желательно обеспечить такие же результаты с использованием более компактного инструментария. Уменьшение размеров инструментов и исключение тросика (692) механизма тянуще-толкающего типа может обеспечить инструментарий, которым легче манипулировать; и может устранить некоторый гистерезис, который может иметь место в ином случае и, возможно, неблагоприятно влиять на точность управления. С этой целью, фиг. 18-19 представляют примерный альтернативный инъекторный узел (800), который выполнен с возможностью обеспечения таких же результатов, которые обеспечиваются приводным узлом (600) инъектора, инъекторным узлом (700) и тросиком (692) механизма тянуще-толкающего типа, но посредством более компактного устройства.
[000114] Как показано на фиг. 18, инъекторный узел (800) в настоящем примере содержит канюлю (802), вращающуюся головку (820), верхнюю качающуюся пластину (830), нижнюю качающуюся пластину (840) и пару полукорпусов (850, 858). Как показано на фиг. 19, инъекторный узел (800) дополнительно включает в себя рамный элемент (860), схемный модуль (870), привод (880) иглы и пару магнитов (848). Набор (810) трубок продолжается в проксимальном направлении от инъекторного узла (800). Каждый из данных компонентов и соответствующие компоненты подробно описаны в дальнейшем.
[000115] Как показано на фиг. 20A-20B, канюля (802) в данном примере включает в себя дистальное, поперечно ориентированное отверстие (804). Игла (806) выполнена с возможностью дистального выдвижения через отверстие (804), как показано на фиг. 20B. В некоторых исполнениях, игла (806) имеет предварительно сформированный изгиб, как описано в патентной заявке США № 15/438,918, «Apparatus for Subretinal Administration of Therapeutic Agent via a Curved Needle», поданной 22 февраля 2017 г., раскрытие которой включено в настоящую заявку путем отсылки.
[000116] Как показано на фиг. 21, полукорпус (850) содержит продолжающуюся внутрь, несъемную шарнирную опору (852) и несъемное посадочное место (854) под опору. Хотя и не показано, следует понимать, что полукорпус (858) также может содержать продолжающуюся внутрь, несъемную шарнирную опору (852) и несъемное посадочное место (854) под опору. Как показано на фиг. 22, нижняя качающаяся пластина (840) содержит пару продолжающихся внутрь шарнирных опор (842), которые расположены и выполнены с возможностью установки в несъемные посадочные места (854) под опоры полукорпуса (850, 858), чтобы обеспечивать шарнирное соединение между нижней качающейся пластиной (840) и полукорпусами (850, 858). Как показано на фиг. 23-24, верхняя качающаяся пластина (830) содержит пару выступающих вниз лапок (832) со сформированными в них отверстиями (834). Отверстия (834) расположены и выполнены с возможностью вмещения шарнирных опор (852) полукорпусов (850, 858), чтобы обеспечивать шарнирное соединение между нижней качающейся пластиной (840) и полукорпусами (850, 858).
[000117] Как показано на фиг. 25, верхняя сторона схемного модуля (870) содержит первый сенсорный переключатель (872) и линейный датчик (876). Первый сенсорный переключатель (872) расположен с возможностью включения пальцем (836) (фиг. 19), который располагается между первым сенсорным переключателем (872) и установочным местом (836) под палец (фиг. 24) на нижней стороне верхней качающейся пластины (840). Хирург может обеспечивать такое включение сенсорного переключателя (872) посредством нажима на верхнюю качающуюся пластину (840), чтобы заставить верхнюю качающуюся пластину (840) повернуться вокруг шарнирных опор (852), что сдвинет палец (836) вниз к первому сенсорному переключателю (872). Первый сенсорный переключатель (872) может сообщаться с модулем (500) управления по одному или более из проводов (812), содержащихся в наборе (810) трубок. Только в виде примера, модуль (500) управления может обеспечивать доставку терапевтического средства (341) через иглу (806) в ответ на включение первого сенсорного переключателя (872), подобно доставке терапевтического средства (341) через иглу инъекторного узла (700) в ответ на включение сенсорного переключателя (624), как описано выше.
[000118] В настоящем примере сенсорный переключатель (872) расположен около проксимального конца инъекторного узла (800); тогда как сенсорный переключатель (874) расположен около дистального конца инъекторного узла (800). Кроме того, точки качания верхней качающейся пластины (830) расположены около дистального конца инъекторного узла (800); тогда как точки качания нижней качающейся пластины (840) расположены около дистального конца инъекторного узла (800). Расположение точек качания и сенсорных переключателей (872, 874) упомянутым образом может снизить риск непреднамеренного включения хирургом сенсорного переключателя (872), при попытке включения сенсорного переключателя (874); и наоборот.
[000119] Линейный датчик (876) содержит ползунок (878) и выполнен и функционирует в точности как вышеописанный линейный датчик (660). Линейный датчик (876) связан с модулем (500) управления одним или более из проводов (812), содержащихся в наборе (810) трубок. Модуль управления (500) выполнен с возможностью обеспечения автоматической доставки текучей среды (340) для подушки через иглу (806) в ответ на перемещение иглы (806) в дистальном направлении, обнаруженное линейным датчиком (876).
[000120] Как показано на фиг. 26, нижняя сторона схемного модуля (870) содержит второй сенсорный переключатель (874). Второй сенсорный переключатель (874) расположен с возможностью включения несъемным штырем (843) (фиг. 22) нижней качающейся пластины (840). Хирург может обеспечивать такое включение сенсорного переключателя (874) поворотным нажимом на полукорпуса (850, 858) вниз, чтобы заставить полукорпуса (850, 858) повернуться вокруг шарнирных опор (842), что сдвинет сенсорный переключатель (874) вниз к несъемному штырю (843). Второй сенсорный переключатель (874) может сообщаться с модулем (500) управления по одному или более из проводов (812), содержащихся в наборе (810) трубок. Только в виде примера, модуль (500) управления может обеспечивать доставку текучей среды (340) для подушки через иглу (806) в ответ на включение второго сенсорного переключателя (874), подобно доставке текучей среды (340) для подушки через иглу инъекторного узла (700) в ответ на включение сенсорного переключателя (632), как описано выше. Примерные альтернативные способы доставки текучей среды (340) для подушки подробно описаны ниже.
[000121] Как также показано на фиг. 22, в дне нижней качающейся пластины (840) сформирована пара углублений (846). Углубления (846) выполнены с возможностью вмещения удлиненных магнитов (848). Магниты (848) обеспечивают магнитное притяжение к магнитной опоре (460), подобно вышеописанным магнитам (706). Таким образом, магниты (848) дают возможность съемного закрепления инъекторного узла (800) к магнитной опоре (460), с возможностью удобной переустановки на магнитной опоре (460) и легкого съема с магнитной опоры (460). Как отмечалось выше, магнитная опора (460) может иметь множество различных альтернативных форм; и, чтобы съемно закреплять инъекторный узел (800) относительно пациента, можно использовать другие подходящие конструкции и методы.
[000122] Как показано на фиг. 27-28, поворотная головка (820), рамный элемент (860) и привод (880) иглы соединены и формируют узел. Поворотная (820) выполнена с возможностью вращения относительно полукорпусов (850, 858). Рамный элемент (860) выполнен с возможностью крепления в одно целое к полукорпусам (850, 858) таким образом, что рамный элемент (860) остается неподвижным относительно полукорпусов (850, 858). Привод (880) иглы выполнен с возможностью поступательного перемещения относительно полукорпусов (850, 858) в ответ на вращение поворотной головки (820) относительно полукорпусов (850, 858). Как показано на фиг. 29, нижняя сторона поворотной головки (820) содержит спиральную кулачковую канавку (824) и магнит (822). Как показано на фиг. 30-31, рамный элемент (860) содержит пару опорных направляющих (862), направляющую прорезь (864) и магнит (866). Как показано на фиг. 32, привод (880) иглы содержит пару направляющих выступов (882), приводимый кулачком штырь (884) и проксимальное отверстие (886).
[000123] Как также показано на фиг. 27-28, направляющие выступы (882) выполнены в размер с возможностью зацепления с опорными направляющими (862). Данное зацепление обеспечивает вертикальную и боковую опору для привода (880) иглы, при одновременном допуске продольного сдвига привода (880) иглы относительно рамного элемента (860). Направляющая прорезь (864) выполнена с возможностью вмещения приводимого кулачком штыря (884) и допуска его скользящего перемещения, когда привод (880) иглы продольно сдвигается относительно рамного элемента (860). Проксимальное отверстие (886) расположено и выполнено с возможностью вмещения ползунка (878) линейного датчика (876) таким образом, что ползунок (878) будет сдвигаться как одно целое с приводом (880) иглы.
[000124] Как показано на фиг. 33A-33B, приводимый кулачком штырь (884) привода (880) иглы выполнен с возможностью вставки в спиральную кулачковую канавку (824) поворотной головки (820). В результате данного зацепления и благодаря проведению приводимого кулачком штыря (884) посредством направляющей прорези (864), привод (880) иглы будет поступательно перемещаться из проксимального положения (фиг. 33A) в дистальное положение (фиг. 33B) в ответ на вращение поворотной головки (820). Игла (806) жестко закреплена к приводу (880) иглы, как подробно описано в дальнейшем, так что игла (806) будет поступательно перемещаться в продольном направлении относительно канюли (802) в ответ на вращение поворотной головки (820). В настоящем примере магниты (822, 866) располагаются так, что магнит (822) будет располагаться непосредственно над магнитом (866), когда поворотная головка (820) находится в исходном положении, как показано на фиг. 33A. На данной стадии магниты (822, 866) предотвращают непреднамеренное вращение поворотной головки (820); но все еще допускает преднамеренное вращение поворотной головки (820). В некоторых других вариантах магниты (822, 866) расположены так, что магнит (822) будет располагаться непосредственно над магнитом (866), когда поворотная головка (820) находится в полностью повернутом положении, как показано на фиг. 33B.
[000125] Как показано на фиг. 34-35, игла (806) продолжается в дистальном направлении от дистального конца привода (880) иглы и жестко закреплена к нему втулкой (807). Трубки (415, 423) продолжаются в проксимальном направлении от проксимального конца привода (880) иглы. Трубка (415) соединена с узлом (413) обратного клапана, который соединен дальше с трубкой (422). Как отмечалось выше, трубка (422) сообщается с кассетой (550) привода в действие шприца и выполнена с возможностью подачи текучей среды (340) для подушки из бутылки (410) с BSS. Узел (413) обратного клапана выполнен с возможностью обеспечения подачи текучей среды только из трубки (422) в трубку (415); и предотвращения подачи текучей среды из трубки (415) в трубку (422). Трубка (423) соединена с узлом (421) обратного клапана, который соединен дальше с трубкой (424). Как отмечалось выше, трубка (424) сообщается с кассетой (550) привода в действие шприца и выполнена с возможностью подачи терапевтического средства (431). Узел (421) обратного клапана выполнен с возможностью обеспечения подачи текучей среды только из трубки (424) в трубку (423); и предотвращения подачи текучей среды из трубки (423) в трубку (424). С учетом принципов, изложенных в настоящей заявке, специалистам со средним уровнем компетентности в данной области техники будут очевидны различные конструкции, которые могут входить в составы узлов (413, 421) обратных клапанов. Трубки (422, 424) встроены в набор (810) трубок вместе с проводами (872).
[000126] Как показано на фиг. 35, дистальный конец трубки (415) вставлен в проксимальное отверстие (881) привода (880) иглы, а дистальный конец трубки (423) вставлен в другое проксимальное отверстие (883) привода (880) иглы. Проксимальное отверстие (881) сообщается по текучей среде с просветом (885), сформированным в приводе (880) иглы, а проксимальное отверстие (883) сообщается по текучей среде с просветом (887), сформированным в приводе (880) иглы. Просветы (885, 887) сообщаются по текучей среде с камерой (889), сформированной в приводе (880) иглы. Проксимальный конец иглы (806) располагается в камере (889). Таким образом, игла (806) принимает текучие среды (840, 841), подаваемые по трубкам (415, 413). Следовательно, привод (880) иглы образует коллектор текучей среды.
[000127] В случае примерного применения, хирург может расположить магнитную опору (460), как показано на фиг. 7, и поместить инъекторный узел (800) на магнитную опору (460). Затем хирург может сформировать склеротомию в глазу (301) пациента и ввести канюлю (802) в глаз (301) через склеротомию. Для поддержки формирования склеротомии, хирург может воспользоваться разметочным инструментом, описанным в патентной заявке США № [ATTORNEY DOCKET NO. END8062USNP.0648021], раскрытие которой включено в настоящую заявку путем отсылки. Для поддержки введения канюли (802) в склеротомию вдоль, по существу, касательного пути, хирург может использовать направляющее крепление, описанное в патентной заявке США №. [ATTORNEY DOCKET NO. END8062USNP.0648021], раскрытие которой включено в настоящую заявку путем отсылки. В качестве другой, лишь наглядной альтернативы, хирург может использовать составленную шовную петлю (332). В таком случае, канюлю (802) можно выдвигать в заданное положение, как показано на фиг. 4C-4D, со ссылкой на канюлю (50).
[000128] С канюлей (802), расположенной, как показано на фиг. 4C-4D со ссылкой на канюлю (50), хирург может вращать головку (820), чтобы продвинуть иглу (806) в дистальном направлении, как показано на фиг. 4E и 5A со ссылкой на иглу (100). Во время такого выдвижения иглы (806), модуль (500) управления будет автоматически доставлять текучую среду (340) для подушки через иглу (806) по сигналу из линейного датчика (876), что приводит, в итоге, к конфигурации, подобной той, которая показана на фиг. 4G и 5B. После того, как игла (806) достаточно выдвинута, хирург приводит в движение верхнюю качающуюся пластину (830). Это предписывает модулю (500) управления доставлять терапевтическое средство (341) через иглу (806), что приводит, в итоге, к конфигурации, подобной той, которая показана на фиг. 4H и 5C. Затем хирург вращает головку (820) в обратном направлении, чтобы отвести иглу (806) обратно в канюлю (802). После отведения иглы (806), хирург выводит канюлю (802) из глаза (301) и надежно закрывает склеротомию с использованием любого подходящего метода
[000129] V. Примерные альтернативные алгоритмы доставки вводной подушки
[000130] Как отмечалось выше, текучая среда (340) для подушки может дозироваться через иглу (100, 806), когда выдвигается в дистальном направлении, чтобы не дать игле (100, 806) проколоть сетчатку (308). Текучая среда (340) для подушки дозируется автоматически модулем (500) управления, что может допускать выбор различных вариантов программирования, чтобы координировать автоматическую подачу текучей среды (340) для подушки. Автоматическая подача текучей среды (340) для подушки может исключить риски, которые в ином случае могут присутствовать в вариантах, в которых текучая среда (340) для подушки подается вручную (например, посредством ножной педали и т.п.). Например, если текучая среда (340) для подушки подается слишком рано (например, до того, как игла (100, 806) прокалывает сосудистую оболочку (306)), то возможно нежелательно попадание текучей среды (340) для подушки в супрахороидальное пространство. Когда текучая среда (340) для подушки попадает в супрахороидальное пространство, текучая среда (340) для подушки может приподнять сосудистую оболочку (306) и сетчатку (308), что может затруднить достижение иглой (100, 806) надлежащего угла для правильного проникания сквозь сосудистую оболочку (306). Если текучая среда (340) для подушки подается слишком рано или слишком поздно (например, после того, как игла (100, 806) проходит сквозь сосудистую оболочку (306) и входит в субретинальное пространство), то защитная функция текучей среды (340) для подушки пропадает, и риск прокалывания сетчатки (308) иглой (100, 806) повышается. Поэтому, может потребоваться создание компонентов и алгоритмов, которые обеспечивают, чтобы вводная подушка формировалась текучей средой (340) для подушки в субретинальном пространстве непосредственно после проникания иглы (100, 806) сквозь сосудистую оболочку (306).
[000131] Поскольку линейные датчики (660, 876) выполнены с возможностью отслеживания положения иглы (100, 806) в реальном времени, то данные из линейных датчиков (660, 876) можно использовать для обеспечения того, чтобы вводная подушка формировалась текучей средой (340) для подушки в субретинальном пространстве непосредственно после проникания иглы (806) сквозь сосудистую оболочку (306). В частности, всякий раз, когда линейный датчик (660, 876) определяет продвижение в дистальном направлении иглы инъекторного узла (700) или иглы (806), соответственно, соответствующий сигнал, посланный в модуль (500) управления, автоматически включит подачу текучей средой (340) для подушки. Это обеспечит, что текучая среда (340) для подушки будет единообразно вытекать из дистального кончика иглы инъекторного узла (700) или иглы (806) всякий раз, когда игла инъекторного узла (700) или игла (806) выдвигается. Посредством обеспечения такого единообразного истечения текучей среды (340) для подушки, система (400) может минимизировать риск случайной перфорации сетчатки (308).
[000132] В настоящем примере расход текучей среды (340) для подушки является предварительно заданным. Только в виде примера, предварительно заданный расход текучей среды (340) для подушки может составлять от приблизительно 100 мл в минуту до приблизительно 300 мл в минуту; от приблизительно 125 мл в минуту до приблизительно 275 мл в минуту; от приблизительно 150 мл в минуту до приблизительно 250 мл в минуту; от приблизительно 175 мл в минуту до приблизительно 225 мл в минуту; или приблизительно 200 мл в минуту.
[000133] В некоторых других исполнениях модуль (500) управления предоставляет устройство пользовательского ввода, на котором хирург может выбрать искомый расход текучей среды для подушки. Кроме того, или в качестве альтернативы, расход текучей среды (340) для подушки может изменяться с учетом скорости поступательного перемещения иглы (100, 806). Например, если игла (100, 806) выдвигается быстро, то текучая среда (340) для подушки может подаваться с относительно большим расходом; и если игла (100, 806) выдвигается медленно, то текучая среда (340) для подушки может подаваться с относительно малым расходом. Кроме того, или в качестве альтернативы, модуль (500) управления может быть выполнен с возможностью обеспечения очень малой задержки после того, как линейный датчик (660, 876) определяет первоначальное выдвижение иглы (100, 806), перед подачей текучей среды (340) для подушки. Например, модуль (500) управления может быть выполнен с возможностью ожидания, пока игла (100, 806) не переместится на предварительно заданное расстояние (например, расстояние, при котором игла (100, 806) выходит из канюли (50, 702, 802), перед подачей текучей среды (340) для подушки.
[000134] Дополнительно к снижению риска прокалывания сетчатки (308) иглой (100, 806), автоматическая подача текучей среды (340) для подушки через иглу (806) может минимизировать риск закупоривания просвета иглы (100, 806) небольшими фрагментами ткани сосудистой оболочки (306), когда игла (100, 806) прокалывает сосудистую оболочку (306).
[000135] Дополнительно к обеспечению основы для алгоритмов управления, осуществляющих подачу текучей среды (340) для подушки, данные из линейных датчиков (660, 876) можно использовать для обеспечения других функций. Например, модуль (500) управления может быть выполнен с возможностью обеспечения некоторой формы обратной связи с пользователем (например, слышимого звукового сигнала, световой подсветки, отображения текстового или графического сообщения, формирования тактильной обратной связи и т.п.), чтобы указывать хирургу, когда игла (100, 806) находится полностью в проксимальном положении. Это может быть важно для обеспечения того, чтобы игла (100, 806) была полностью отведенной в канюлю (50, 702, 802), когда канюлю (50, 702, 802) вводят в супрахороидальное пространство. Кроме того, или в качестве альтернативы, модуль (500) управления может быть выполнен с возможностью обеспечения некоторой формы обратной связи с пользователем (например, слышимого звукового сигнала, световой подсветки, отображения текстового или графического сообщения, формирования тактильной обратной связи и т.п.), чтобы указывать хирургу, когда игла (100, 806) находится полностью в дистальном положении. Это может предложить хирургу нажать кнопку (604) или привести в движение верхнюю качающуюся пластину (830), чтобы, тем самым, инициировать доставку терапевтического средства (341). В виде еще одного, всего лишь наглядного примера, данные из линейного датчика (660, 876) можно записывать, чтобы создавать статистические данные, касающиеся фактической длительности выдвижения иглы (100, 806) в ходе различных процедур и т.п. С учетом принципов, изложенных в настоящей заявке, специалистам со средним уровнем компетентности в данной области техники будут очевидны другие подходящие применения для данных из линейного датчика (660, 876).
[000136] Как также отмечалось выше, терапевтическое средство (341) доставляется в субретинальное пространство после того как текучая среда (340) для подушки достигла субретинального пространства. Как терапевтическое средство (341), так и текучая среда (340) для подушки доставляются одной и той же иглой (100, 806). В некоторых случаях, между терапевтическим средством (341) и текучей средой (340) для подушки помещается небольшой воздушный зазор (например, приблизительно 5 мкм). Термин «воздух» в контексте настоящего описания следует понимать как включающий в себя любой подходящий стерильный воздух или газ. Когда объем воздуха между терапевтическим средством (341) и текучей средой (340) для подушки достигает субретинального пространства (в виде пузырька или пузырьков) пузырек(пузырьки) может(могут) облегчить визуализацию местоположения текучей среды (340) для подушки, чтобы, тем самым, способствовать подтверждению того, что игла (100, 806) успешно достигла субретинального пространства. Поэтому может быть желательно дополнительное улучшение визуализации местоположения текучей среды (340) для подушки в субретинальном пространстве. Это достижимо посредством подачи сочетания текучей среды (340) для подушки и воздуха в иглу (100, 806) перед введением терапевтического средства (341) в иглу (100, 806).
[000137] Фиг. 36 представляет различные примерные сочетания подачи текучей среды (340) для подушки и воздуха в иглу (100, 806) перед введением терапевтического средства (341) в иглу (100, 806). Например, программа (900) подает только текучую среду (340) для подушки по всей игле (100, 806) перед введением терапевтического средства (341) в иглу (100, 806). Программа (902) подает только воздух по всей игле (100, 806) перед введением терапевтического средства (341) в иглу (100, 806). Программа (904) подает первоначальный объем текучей среды (340) для подушки, после чего подает воздух, перед введением терапевтического средства (341) в иглу (100, 806). Данный задержанный карман воздуха может формировать большой пузырек (или пузырьки), который(ые) легко визуализируется(ются) в субретинальном пространстве. Программа (906) также подает первоначальный объем текучей среды (340) для подушки, после чего подает воздух, перед введением терапевтического средства (341) в иглу (100, 806). Данный задержанный карман воздуха меньше, чем карман воздуха, подаваемый программой (904). Программа (908) также подает первоначальный объем текучей среды (340) для подушки, после чего подает чередующиеся импульсы воздуха и текучей среды (340) для подушки, перед введением терапевтического средства (341) в иглу (100, 806). Чередующиеся импульсы воздуха и текучей среды (340) для подушки могут создавать несколько пузырьков, которые легко визуализируются в субретинальном пространстве. Программа (910) также подает первоначальный объем текучей среды (340) для подушки, после чего подает чередующиеся импульсы воздуха и текучей среды (340) для подушки, перед введением терапевтического средства (341) в иглу (100, 806). Чередующиеся импульсы воздуха и текучей среды (340) для подушки по программе (910) являются более короткими и многочисленными, чем импульсы воздуха и текучей среды (340) для подушки по программе (908). Это может привести к образованию большего числа пузырьков и пузырькам меньшего размера в субретинальном пространстве.
[000138] В вышеприведенных примерах, в которых в иглу (100, 806) подается воздух, возможно, желательно использовать систему с контролируемым давлением для подачи воздуха вместо системы с контролируемым смещением. При этом возможет учет статического давления открытия и обеспечение немедленной вводной подушки из воздуха вместо задержанной вводной подушки. В исполнения, в которых в иглу (100, 806) подаются сочетания воздуха и текучей среды (340) для подушки, можно применить клапан, чтобы переключаться между бутылкой (410) с BSS и источником воздуха. В некоторых вариантах расход текучей среды (340) для подушки можно повышать, чтобы естественно вызывать образование воздушных пузырьков в линии. С учетом принципов, изложенных в настоящей заявке, специалистам со средним уровнем компетентности в данной области техники будут очевидны другие подходящие компоненты и методы, которые можно использовать для обеспечения сочетания текучей среды (340) для подушки и воздуха по всей игле (100, 806).
[000139] VI. Примерные сочетания
[000140] Нижеследующие примеры относятся к различным неисчерпывающим способам, в которых можно объединять или применять принципы, изложенные в настоящей заявке. Следует понимать, что нижеследующие примеры не предполагают ограничения объема защиты каких-либо пунктов формулы изобретения, которые в любое время могут быть представлены в настоящей заявке или при последующих подачах настоящей заявки. Никакого отказа от формулы изобретения не предполагается. Нижеследующие примеры предлагаются не более, чем просто в целях иллюстрации. Предполагается, что различные принципы, изложенные в настоящей заявке, можно организовать и применять множеством других способов. Предполагается также, что некоторые варианты могут обходиться без некоторых признаков, упоминаемых в нижеприведенных примерах. Поэтому, ни один из аспектов или признаков, упоминаемых ниже, нельзя считать критически важным, если иное прямо не указано в таковом качестве позднее авторами настоящего изобретения или правопреемником авторов настоящего изобретения. Если в настоящей заявке или в последующих подачах заявок, родственных настоящей заявки, представлены какие-либо пункты формулы изобретения, которые включают в себя дополнительные признаки, сверх тех, которые упоминаются ниже, то данные дополнительные признаки нельзя считать добавленными по какой-либо причине, относящейся к патентоспособности.
[000141] Пример 1
[000142] Устройство, содержащее: (a) инъектор, при этом инъектор содержит: (i) корпус, (ii) гибкую канюлю, продолжающуюся в дистальном направлении из корпуса, (iii) гибкую иглу, причем игла выполнена с возможностью поступательного перемещения относительно канюли, и (iv) датчик, причем датчик выполнен с возможностью определения положения иглы относительно канюли; (b) первую трубку для текучей среды, соединенную с иглой; (c) вторую трубку для текучей среды, соединенную с иглой; и (d) модуль управления, причем модуль управления связан с датчиком, причем модуль управления сообщается с первой трубкой для текучей среды, причем модуль управления сообщается со второй трубкой для текучей среды, причем модуль управления выполнен с возможностью обеспечения подачи первой текучей среды по первой трубке в иглу по сигналу из датчика, причем модуль управления дополнительно выполнен с возможностью обеспечения подачи второй текучей среды по второй трубке в иглу.
[000143] Пример 2
[000144] Устройство по примеру 1, в котором датчик содержит линейный потенциометр.
[000145] Пример 3
[000146] Устройство по любому отдельному или более из примеров 1-2, дополнительно содержащее привод иглы, причем привод иглы выполнен с возможностью приведения в движение иглы продольно относительно канюли, причем датчик соединен с линейным приводом.
[000147] Пример 4
[000148] Устройство по любому отдельному или более из примеров 1-3, в котором первая трубка для текучей среды и вторая трубка для текучей среды формируют набор трубок, продолжающийся между инъектором и модулем управления.
[000149] Пример 5
[000150] Устройство по любому отдельному или более из примеров 1-4, в котором канюля имеет размер и конфигурацию для входа через склеротомию, сформированную в глазу пациента.
[000151] Пример 6
[000152] Устройство по любому отдельному или более из примеров 1-5, в котором инъектор дополнительно содержит: (i) инъекторный подузел, при этом корпус, канюля и игла входят в состав инъекторного подузла, (ii) приводной подузел инъектора, причем приводной подузел инъектора содержит привод иглы, и (iii) гибкий привод, продолжающийся между инъекторным подузлом и приводным подузлом инъектора, причем привод иглы выполнен с возможностью передачи движения от привода иглы игле, чтобы, тем самым, поступательно перемещать иглу относительно канюли.
[000153] Пример 7
[000154] Устройство по примеру 6, в котором датчик содержится в приводном подузле инъектора.
[000155] Пример 8
[000156] Устройство по любому отдельному или более из примеров 1-5, в котором инъектор дополнительно содержит: (i) привод иглы, содержащийся в корпусе, и (ii) первое средство пользовательского ввода, продолжающееся из корпуса, при этом первое средство пользовательского ввода выполнено с возможностью приведения в действие привода иглы, чтобы, тем самым, поступательно перемещать иглу относительно канюли.
[000157] Пример 9
[000158] Устройство по примеру 8, в котором первое средство пользовательского ввода содержит поворотную головку, соединенную с возможностью вращения с корпусом.
[000159] Пример 10
[000160] Устройство по любому отдельному или более из примеров 8-9, в котором инъектор дополнительно содержит второе средство пользовательского ввода, при этом модуль управления дополнительно выполнен с возможностью обеспечения подачи второй текучей среды по второй трубке в иглу в ответ на приведение в действие второго средства пользовательского ввода.
[000161] Пример 11
[000162] Устройство по примеру 10, в котором второе средство пользовательского ввода содержит кнопку.
[000163] Пример 12
[000164] Устройство по любому отдельному или более из примеров 10-11, в котором инъектор дополнительно содержит третье средство пользовательского ввода, при этом модуль управления дополнительно выполнен с возможностью обеспечения подачи первой текучей среды по первой трубке в иглу в ответ на приведение в действие третьего средства пользовательского ввода.
[000165] Пример 13
[000166] Устройство по любому отдельному или более из примеров 1-12, в котором первая текучая среда содержит жидкость.
[000167] Пример 14
[000168] Устройство по любому отдельному или более из примеров 1-13, в котором первая текучая среда содержит газ.
[000169] Пример 15
[000170] Устройство по любому отдельному или более из примеров 1-12, в котором первая текучая среда содержит сочетание жидкости и газа.
[000171] Пример 16
[000172] Устройство по примеру 15, в котором модуль управления выполнен с возможностью обеспечения подачи жидкости, с последующей подачей газа, по сигналу из датчика.
[000173] Пример 17
[000174] Устройство по любому отдельному или более из примеров 15-16, в котором модуль управления выполнен с возможностью обеспечения подачи жидкости, с последующей подачей чередующихся импульсов газа и жидкости, по сигналу из датчика.
[000175] Пример 18
[000176] Устройство по любому отдельному или более из примеров 1-17, в котором модуль управления выполнен с возможностью обеспечения подачи первой текучей среды по первой трубке в иглу по сигналу из датчика, указывающему, что игла перемещается в дистальном направлении относительно канюли.
[000177] Пример 19
[000178] Устройство, содержащее: (a) инъектор, при этом инъектор содержит: (i) корпус, (ii) гибкую канюлю, продолжающуюся в дистальном направлении из корпуса, (iii) гибкую иглу, причем игла выполнена с возможностью поступательного перемещения относительно канюли, и (iv) датчик, причем датчик выполнен с возможностью определения положения иглы относительно канюли; и (b) модуль управления, причем модуль управления связан с датчиком, причем модуль управления выполнен с возможностью обеспечения подачи сочетания первой жидкости и газа в иглу по сигналу из датчика, причем модуль управления дополнительно выполнен с возможностью обеспечения подачи второй текучей среды по второй трубке в иглу после подачи сочетания первой жидкости и газа в иглу.
[000179] Пример 20
[000180] Способ содержащий следующие этапы: (a) введение гибкой канюли в склеротомию глаза пациента, между склерой и сосудистой оболочкой глаза; (b) выдвижение иглы по канюле в то время, когда канюля расположена между склерой и сосудистой оболочкой; (c) отслеживание выдвижения иглы с помощью датчика; (d) автоматическое дозирование текучей среды для вводной подушки через иглу на основании данных из датчика, при этом этап автоматического дозирования текучей среды для вводной подушки выполняется при одновременном выдвижении иглы; и (e) инъекцию терапевтического средства в пространство между сетчаткой и сосудистой оболочкой глаза, через выдвинутую иглу.
[000181] VII. Прочие положения
[000182] Следует понимать, что любое из исполнений инструментов, описанных в настоящей заявке, может включать в себя различные другие признаки дополнительно к или вместо вышеописанных признаков. Только в виде примера, любое из устройств, описанных в настоящей заявке, может также включать в себя один или более из различных признаков, раскрытых в любой из различных ссылок, которые включены в настоящую заявку путем отсылки.
[000183] Следует понимать, что любой отдельно взятый или более из принципов, выражений, вариантов осуществления, примеров и т.д., приведенных в настоящей заявке, можно объединять с любым отдельно взятым или более из других принципов, выражений, вариантов осуществления, примеров и т.д., которые приведены в настоящей заявке. Поэтому вышеописанные принципы, выражения, варианты осуществления, примеры и т.д. нельзя рассматривать отдельно друг от друга. Различные подходящие способы, в которых принципы настоящего изобретения можно объединять, будут совершенно очевидны специалистам со средним уровнем компетентности в данной области техники, с учетом принципов, изложенных в настоящей заявке. Предполагается, что такие модификации и изменения не должны выходить за пределы объема охраны формулы изобретения.
[000184] Следует понимать, что любой патент, публикация или другой материал, раскрывающий сущность изобретения, полностью или частично, который указан включенным в настоящую заявку путем отсылки, включен в настоящую заявку только в той степени, в которой включенный материал не конфликтует с существующими определениями, утверждениями или другими материалами, раскрывающими сущность изобретения, изложенными в настоящем раскрытии. По существу, и в необходимой степени, раскрытие, как прямо указано в настоящей заявке, заменяет собой любой конфликтующий материал, включенный в настоящую заявку путем отсылки. Любой материал или его часть, который указан включенным в настоящую заявку путем отсылки, но который конфликтует с существующими определениями, утверждениями или другими материалами, раскрывающими сущность изобретения, изложенными в настоящей заявке, будет включен в нее только в той степени, до которой не возникает никакого конфликта между включенным материалом и имеющимся материалом, раскрывающим сущность изобретения.
[000185] Вышеописанные исполнения могут предназначаться для удаления в отходы после однократного использования или могут быть выполнены с возможностью многократного использования. В любом или обоих случаях, исполнения можно восстанавливать для повторного использования после, по меньшей мере, одного использования. Восстановление может включать в себя любое сочетание этапов разборки устройства, с последующей чисткой или заменой конкретных деталей и последующей повторной сборкой. В частности, некоторые исполнения устройства можно разбирать, и любое число конкретных деталей или частей устройства можно избирательно заменять или снимать в любом сочетании. После чистки и/или замены конкретных частей, некоторые исполнения устройства могут быть повторно собраны для последующего использования либо на ремонтном предприятии, либо хирургом непосредственно перед процедурой. Специалистам в данной области техники будет очевидно, что для восстановления устройства можно применить множество различных методов разборки, чистки/замены и повторной сборки. Применение таких методов и полученное восстановленное устройство не выходят за пределы объема настоящей заявки.
[000186] Только в виде примера, исполнения, описанные в настоящей заявке, можно стерилизовать до и/или после процедуры. По одному методу стерилизации, устройство помещают в закрытый и герметичный контейнер, например, пакет из пластика или материала TYVEK (полиэтилена высокой плотности). Затем контейнер и устройство можно поместить под излучение, которое может проникать сквозь контейнер, например, гамма-излучение, рентгеновское излучение или поток электронов высокой энергии. Излучение может убивать бактерии на устройстве и в контейнере. Затем стерилизованное устройство можно хранить в стерильном контейнере для последующего использования. Устройство можно также стерилизовать с использованием любого другого метода, известного в данной области техники, включая, но без ограничения, бета- или гамма-излучение, этиленоксид или пар.
[000187] Выше показаны и описаны различные варианты осуществления настоящего изобретения, однако, специалистом со средним уровнем компетентности в данной области техники могут быть выполнены путем соответствующих модификаций дополнительно адаптированные варианты способов и систем, описанных в настоящей заявке, не выходящие за пределы настоящего изобретения. Несколько из таких потенциальных модификаций были упомянуты, а другие будут очевидны специалистам в данной области техники. Например, вышеописанные примеры, варианты осуществления, геометрии, материалы, размеры, отношения, этапы и тому подобное являются наглядными и не обязательными. Соответственно, объем настоящего изобретения следует считать определяемым нижеследующей формулой изобретения и понимать, как не ограниченный деталями конструкции и работы, показанными и описанными в описании и на чертежах.
Claims (48)
1. Устройство для субретинальной доставки терапевтического средства, содержащее:
(a) инъектор, при этом инъектор содержит:
(i) корпус,
(ii) гибкую канюлю, продолжающуюся в дистальном направлении из корпуса,
(iii) гибкую иглу, причем игла выполнена с возможностью поступательного перемещения относительно канюли, и
(iv) датчик, причем датчик выполнен с возможностью определения положения иглы относительно канюли;
(b) первую трубку для текучей среды, соединенную с иглой;
(c) вторую трубку для текучей среды, соединенную с иглой; и
(d) модуль управления, причем модуль управления связан с датчиком, причем модуль управления сообщается с первой трубкой для текучей среды, причем модуль управления сообщается со второй трубкой для текучей среды,
причем модуль управления выполнен с возможностью обеспечения подачи первой текучей среды по первой трубке в иглу по сигналу из датчика,
причем модуль управления дополнительно выполнен с возможностью обеспечения подачи второй текучей среды по второй трубке в иглу.
2. Устройство по п. 1, в котором датчик содержит линейный потенциометр.
3. Устройство по п. 1, дополнительно содержащее привод иглы, при этом привод иглы выполнен с возможностью приведения в движение иглы продольно относительно канюли, причем датчик соединен с приводом иглы.
4. Устройство по п. 1, в котором первая трубка для текучей среды и вторая трубка для текучей среды формируют набор трубок, продолжающийся между инъектором и модулем управления.
5. Устройство по п. 1, в котором канюля имеет размер и конфигурацию для входа через склеротомию, сформированную в глазу пациента.
6. Устройство по п. 1, в котором инъектор дополнительно содержит:
(i) инъекторный подузел, при этом корпус, канюля и игла входят в состав инъекторного подузла,
(ii) приводной подузел инъектора, причем приводной подузел инъектора содержит привод иглы, и
(iii) гибкий привод, продолжающийся между инъекторным подузлом и приводным подузлом инъектора, причем гибкий привод выполнен с возможностью передачи движения от привода иглы игле, чтобы тем самым поступательно перемещать иглу относительно канюли.
7. Устройство по п. 6, в котором датчик содержится в приводном подузле инъектора.
8. Устройство по п. 1, в котором инъектор дополнительно содержит:
(i) привод иглы, содержащийся в корпусе, и
(ii) первое средство пользовательского ввода, продолжающееся из корпуса, при этом первое средство пользовательского ввода выполнено с возможностью приведения в действие привода иглы, чтобы тем самым поступательно перемещать иглу относительно канюли.
9. Устройство по п. 8, в котором первое средство пользовательского ввода содержит поворотную головку, соединенную с возможностью вращения с корпусом.
10. Устройство по п. 8, в котором инъектор дополнительно содержит второе средство пользовательского ввода, при этом модуль управления дополнительно выполнен с возможностью обеспечения подачи второй текучей среды по второй трубке для текучей среды в иглу в ответ на приведение в действие второго средства пользовательского ввода.
11. Устройство по п. 10, в котором второе средство пользовательского ввода содержит кнопку.
12. Устройство по п. 10, в котором инъектор дополнительно содержит третье средство пользовательского ввода, при этом модуль управления дополнительно выполнен с возможностью обеспечения подачи первой текучей среды по первой трубке для текучей среды в иглу в ответ на приведение в действие третьего средства пользовательского ввода.
13. Устройство по п. 1, в котором первая текучая среда содержит жидкость.
14. Устройство по п. 1, в котором первая текучая среда содержит газ.
15. Устройство по п. 1, в котором первая текучая среда содержит сочетание жидкости и газа.
16. Устройство по п. 15, в котором модуль управления выполнен с возможностью обеспечения подачи жидкости, с последующей подачей газа, по сигналу из датчика.
17. Устройство по п. 15, в котором модуль управления выполнен с возможностью обеспечения подачи жидкости, с последующей подачей чередующихся импульсов газа и жидкости, по сигналу из датчика.
18. Устройство по п. 1, в котором модуль управления выполнен с возможностью обеспечения подачи первой текучей среды по первой трубке для текучей среды в иглу по сигналу из датчика, указывающему, что игла перемещается в дистальном направлении относительно канюли.
19. Устройство для субретинальной доставки терапевтического средства, содержащее:
(a) инъектор, при этом инъектор содержит:
(i) корпус,
(ii) гибкую канюлю, продолжающуюся в дистальном направлении из корпуса,
(iii) гибкую иглу, причем игла выполнена с возможностью поступательного перемещения относительно канюли, и
(iv) датчик, причем датчик выполнен с возможностью определения положения иглы относительно канюли; и
(b) модуль управления, причем модуль управления связан с датчиком,
причем модуль управления выполнен с возможностью обеспечения подачи сочетания первой жидкости и газа в иглу по сигналу из датчика,
причем модуль управления дополнительно выполнен с возможностью обеспечения подачи второй текучей среды в иглу после подачи сочетания первой жидкости и газа в иглу.
20. Способ для субретинальной доставки терапевтического средства, содержащий следующие этапы:
(a) вводят гибкую канюлю в склеротомию глаза пациента, между склерой и сосудистой оболочкой глаза;
(b) выдвигают иглу по канюле в то время, когда канюля расположена между склерой и сосудистой оболочкой;
(c) отслеживают выдвижение иглы с помощью датчика;
(d) автоматически дозируют текучую среду для вводной подушки через иглу на основании данных из датчика, при этом этап автоматического дозирования текучей среды для вводной подушки выполняют при одновременном выдвижении иглы; и
(e) инъецируют терапевтическое средство в пространство между сетчаткой и сосудистой оболочкой глаза, через выдвинутую иглу.
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201662351611P | 2016-06-17 | 2016-06-17 | |
| US62/351,611 | 2016-06-17 | ||
| US15/609,386 US10646374B2 (en) | 2016-06-17 | 2017-05-31 | Apparatus and method to form entry bleb for subretinal delivery of therapeutic agent |
| US15/609,386 | 2017-05-31 | ||
| PCT/US2017/037361 WO2017218610A1 (en) | 2016-06-17 | 2017-06-14 | Apparatus and method to form entry bleb for subretinal delivery of therapeutic agent |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| RU2019101083A RU2019101083A (ru) | 2020-07-17 |
| RU2019101083A3 RU2019101083A3 (ru) | 2020-08-27 |
| RU2742971C2 true RU2742971C2 (ru) | 2021-02-12 |
Family
ID=60661489
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2019101083A RU2742971C2 (ru) | 2016-06-17 | 2017-06-14 | Устройство и способ для формирования вводной подушки для субретинальной доставки терапевтического средства |
Country Status (13)
| Country | Link |
|---|---|
| US (1) | US10646374B2 (ru) |
| EP (1) | EP3471670B8 (ru) |
| JP (1) | JP6755976B2 (ru) |
| KR (1) | KR102227429B1 (ru) |
| CN (1) | CN109310518B (ru) |
| AU (1) | AU2017285139B2 (ru) |
| BR (1) | BR112018075965A2 (ru) |
| CA (1) | CA3026284A1 (ru) |
| IL (1) | IL263599B2 (ru) |
| RU (1) | RU2742971C2 (ru) |
| SA (1) | SA518400661B1 (ru) |
| SG (1) | SG11201810521WA (ru) |
| WO (1) | WO2017218610A1 (ru) |
Families Citing this family (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10624785B2 (en) | 2016-01-30 | 2020-04-21 | Carl Zeiss Meditec Cataract Technology Inc. | Devices and methods for ocular surgery |
| US11000410B2 (en) | 2016-06-17 | 2021-05-11 | Gyroscope Therapeutics Limited | Guide apparatus for tangential entry into suprachoroidal space |
| US10806629B2 (en) | 2016-06-17 | 2020-10-20 | Gyroscope Therapeutics Limited | Injection device for subretinal delivery of therapeutic agent |
| US11076984B2 (en) | 2017-03-13 | 2021-08-03 | Gyroscope Therapeutics Limited | Method of performing subretinal drainage and agent delivery |
| CN110799155B (zh) | 2017-05-04 | 2022-03-22 | 卡尔蔡司白内障医疗技术公司 | 用于眼外科手术的装置和方法 |
| AU2019282173B2 (en) | 2018-06-05 | 2024-08-08 | Carl Zeiss Meditec Cataract Technology Inc. | Ophthalmic microsurgical tools, systems, and methods of use |
| EP3917468B1 (en) | 2019-02-01 | 2023-11-15 | Carl Zeiss Meditec Cataract Technology Inc. | Ophthalmic cutting instruments having integrated aspiration pump |
| CN113453738B (zh) * | 2019-02-08 | 2023-11-21 | 追踪注射器有限责任公司 | 针传感器组件及其使用方法 |
| US11759355B1 (en) * | 2019-02-26 | 2023-09-19 | Gyroscope Therapeutics Limited | Method of delivering leading blebs and agent to subretinal space |
| CN114096221A (zh) | 2019-05-17 | 2022-02-25 | 卡尔蔡司白内障医疗技术公司 | 具有集成抽吸泵的眼科切割器械 |
| CN114206277B (zh) | 2019-06-07 | 2024-06-25 | 卡尔蔡司白内障医疗技术公司 | 用于眼科切割工具的多级触发器 |
| EP4013474A4 (en) * | 2019-09-11 | 2023-08-23 | Altaviz, LLC | MICROVOLUME INJECTORS WITH DOSE GUIDANCE AND METHOD OF USE |
| CA3155564A1 (en) | 2019-10-11 | 2021-04-15 | Gyroscope Therapeutics Limited | Dose clip assembly for syringe |
| DE102020115346A1 (de) | 2020-06-09 | 2021-12-09 | Carl Zeiss Meditec Ag | Kontrollierte Injektion zwischen zwei Gewebeschichten des menschlichen Auges |
| US20230390111A1 (en) | 2020-12-22 | 2023-12-07 | Gyroscope Therapeutics Limited | Ocular cannula guide |
| CN112842686A (zh) * | 2021-02-05 | 2021-05-28 | 中国人民解放军陆军特色医学中心 | 老年性黄斑变性治疗用微针装置 |
| JP2024536736A (ja) * | 2021-09-30 | 2024-10-08 | アルコン インコーポレイティド | 網膜下注入用の装置 |
| NL2032219B1 (en) | 2022-06-20 | 2024-01-08 | Crea Ip B V | Injector device |
| WO2024013559A1 (en) | 2022-07-11 | 2024-01-18 | Gyroscope Therapeutics Limited | Transvitreal subretinal injector |
| WO2024052733A1 (en) * | 2022-09-06 | 2024-03-14 | Gyroscope Therapeutics Limited | Apparatus for subretinal administration of therapeutic agent via dual-curved needle |
| WO2024150069A2 (en) | 2023-01-13 | 2024-07-18 | Gyroscope Therapeutics Limited | Dose dock for syringe |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20150164687A1 (en) * | 2013-12-18 | 2015-06-18 | Novartis Ag | Systems and Methods for Subretinal Delivery of Therapeutic Agents |
| WO2016023116A1 (en) * | 2014-08-12 | 2016-02-18 | Patrick Gooi | Device, delivery system, and method for ocular therapy |
| US20160074212A1 (en) * | 2014-09-11 | 2016-03-17 | Ethicon Endo-Surgery, Inc. | Method and apparatus for sensing position between layers of an eye |
Family Cites Families (30)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5709661A (en) * | 1992-04-14 | 1998-01-20 | Endo Sonics Europe B.V. | Electronic catheter displacement sensor |
| US6171276B1 (en) * | 1997-08-06 | 2001-01-09 | Pharmacia & Upjohn Ab | Automated delivery device and method for its operation |
| SE9702872D0 (sv) * | 1997-08-06 | 1997-08-06 | Pharmacia & Upjohn Ab | Automated delivery device and method for its operation |
| US6368315B1 (en) | 1999-06-23 | 2002-04-09 | Durect Corporation | Composite drug delivery catheter |
| GB2399020B (en) | 2002-02-14 | 2005-01-12 | Photogenesis Inc | Subretinal implantation device and surgical cannulas for use therewith |
| US7328064B2 (en) * | 2002-07-04 | 2008-02-05 | Inovio As | Electroporation device and injection apparatus |
| CA2689424A1 (en) | 2002-09-29 | 2004-04-08 | Surmodics, Inc. | Methods for treatment and/or prevention of retinal disease |
| PL1641914T3 (pl) | 2003-06-27 | 2017-01-31 | DePuy Synthes Products, Inc. | Komórki pochodzące z poporodowej tkanki łożyska oraz sposoby uzyskiwania i zastosowania tych komórek |
| US7207980B2 (en) | 2004-01-23 | 2007-04-24 | Iscience Surgical Corporation | Composite ophthalmic microcannula |
| US20080058704A1 (en) | 2004-04-29 | 2008-03-06 | Michael Hee | Apparatus and Method for Ocular Treatment |
| US20060257835A1 (en) * | 2005-05-13 | 2006-11-16 | Wallaker Daniel M | Endoscopy simulation system |
| US20070202186A1 (en) | 2006-02-22 | 2007-08-30 | Iscience Interventional Corporation | Apparatus and formulations for suprachoroidal drug delivery |
| US8197435B2 (en) | 2006-05-02 | 2012-06-12 | Emory University | Methods and devices for drug delivery to ocular tissue using microneedle |
| US8425473B2 (en) | 2009-01-23 | 2013-04-23 | Iscience Interventional Corporation | Subretinal access device |
| US20120191064A1 (en) | 2009-05-15 | 2012-07-26 | Iscience Interventional Corporation | Methods and apparatus for sub-retinal catheterization |
| EP2627292B1 (en) | 2010-10-15 | 2018-10-10 | Clearside Biomedical, Inc. | Device for ocular access |
| US20150209180A1 (en) | 2012-08-27 | 2015-07-30 | Clearside Biomedical, Inc. | Apparatus and Methods for Drug Delivery Using Microneedles |
| SG11201503637SA (en) | 2012-11-08 | 2015-06-29 | Clearside Biomedical Inc | Methods and devices for the treatment of ocular diseases in human subjects |
| WO2015126694A1 (en) | 2014-02-12 | 2015-08-27 | Ethicon Endo-Surgery, Inc. | Method and apparatus for suprachoroidal administration of therapeutic agent |
| US9925088B2 (en) | 2014-06-06 | 2018-03-27 | Janssen Biotech, Inc. | Sub-retinal tangential needle catheter guide and introducer |
| US9949874B2 (en) | 2014-06-06 | 2018-04-24 | Janssen Biotech, Inc. | Therapeutic agent delivery device with convergent lumen |
| US20180042765A1 (en) | 2014-06-17 | 2018-02-15 | Clearside Biomedical, Inc. | Methods and devices for treating posterior ocular disorders |
| WO2015196085A2 (en) | 2014-06-20 | 2015-12-23 | Clearside Biomedical, Inc. | Variable diameter cannula and methods for controlling insertion depth for medicament delivery |
| US10219936B2 (en) | 2014-09-11 | 2019-03-05 | Orbit Biomedical Limited | Therapeutic agent delivery device with advanceable cannula and needle |
| US10064752B2 (en) | 2014-09-11 | 2018-09-04 | Orbit Biomedical Limited | Motorized suprachoroidal injection of therapeutic agent |
| US10258502B2 (en) | 2014-09-18 | 2019-04-16 | Orbit Biomedical Limited | Therapeutic agent delivery device |
| GB201516066D0 (en) | 2015-09-10 | 2015-10-28 | Young & Co Llp D | Treatment of retinitis pigmentosa |
| US10478553B2 (en) | 2016-03-09 | 2019-11-19 | Orbit Biomedical Limited | Apparatus for subretinal administration of therapeutic agent via a curved needle |
| US10806629B2 (en) | 2016-06-17 | 2020-10-20 | Gyroscope Therapeutics Limited | Injection device for subretinal delivery of therapeutic agent |
| US11000410B2 (en) | 2016-06-17 | 2021-05-11 | Gyroscope Therapeutics Limited | Guide apparatus for tangential entry into suprachoroidal space |
-
2017
- 2017-05-31 US US15/609,386 patent/US10646374B2/en active Active
- 2017-06-14 AU AU2017285139A patent/AU2017285139B2/en active Active
- 2017-06-14 EP EP17731793.0A patent/EP3471670B8/en active Active
- 2017-06-14 WO PCT/US2017/037361 patent/WO2017218610A1/en unknown
- 2017-06-14 JP JP2018565696A patent/JP6755976B2/ja active Active
- 2017-06-14 KR KR1020197001537A patent/KR102227429B1/ko active IP Right Grant
- 2017-06-14 CN CN201780037447.8A patent/CN109310518B/zh active Active
- 2017-06-14 SG SG11201810521WA patent/SG11201810521WA/en unknown
- 2017-06-14 BR BR112018075965-1A patent/BR112018075965A2/pt active IP Right Grant
- 2017-06-14 RU RU2019101083A patent/RU2742971C2/ru active
- 2017-06-14 CA CA3026284A patent/CA3026284A1/en active Pending
-
2018
- 2018-12-09 IL IL263599A patent/IL263599B2/en unknown
- 2018-12-13 SA SA518400661A patent/SA518400661B1/ar unknown
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20150164687A1 (en) * | 2013-12-18 | 2015-06-18 | Novartis Ag | Systems and Methods for Subretinal Delivery of Therapeutic Agents |
| WO2016023116A1 (en) * | 2014-08-12 | 2016-02-18 | Patrick Gooi | Device, delivery system, and method for ocular therapy |
| US20160074212A1 (en) * | 2014-09-11 | 2016-03-17 | Ethicon Endo-Surgery, Inc. | Method and apparatus for sensing position between layers of an eye |
Also Published As
| Publication number | Publication date |
|---|---|
| IL263599A (en) | 2019-01-31 |
| SG11201810521WA (en) | 2018-12-28 |
| EP3471670B1 (en) | 2020-10-14 |
| BR112018075965A2 (pt) | 2019-04-02 |
| RU2019101083A (ru) | 2020-07-17 |
| JP2019517888A (ja) | 2019-06-27 |
| CA3026284A1 (en) | 2017-12-21 |
| WO2017218610A1 (en) | 2017-12-21 |
| EP3471670A1 (en) | 2019-04-24 |
| IL263599B (en) | 2022-10-01 |
| RU2019101083A3 (ru) | 2020-08-27 |
| AU2017285139B2 (en) | 2020-12-24 |
| AU2017285139A1 (en) | 2018-12-20 |
| KR102227429B1 (ko) | 2021-03-15 |
| US20170360607A1 (en) | 2017-12-21 |
| EP3471670B8 (en) | 2020-11-11 |
| KR20190022646A (ko) | 2019-03-06 |
| US10646374B2 (en) | 2020-05-12 |
| CN109310518A (zh) | 2019-02-05 |
| IL263599B2 (en) | 2023-02-01 |
| SA518400661B1 (ar) | 2022-09-19 |
| CN109310518B (zh) | 2021-08-17 |
| JP6755976B2 (ja) | 2020-09-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| RU2742971C2 (ru) | Устройство и способ для формирования вводной подушки для субретинальной доставки терапевтического средства | |
| US11554042B2 (en) | Method and apparatus for subretinal administration of therapeutic agent | |
| US11723798B2 (en) | Sub-retinal tangential needle catheter guide and introducer | |
| RU2740842C2 (ru) | Инъекционное устройство для субретинальной доставки терапевтического средства | |
| KR102608333B1 (ko) | 곡침을 통해 치료제를 망막하 투여하기 위한 장치 | |
| KR102203456B1 (ko) | 맥락막상 공간으로 접선방향 유입을 위한 가이드 장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| HZ9A | Changing address for correspondence with an applicant | ||
| PD4A | Correction of name of patent owner |