RU2535191C2 - Управление помехами, оптимизация sinr и усовершенствования сигнализации, чтобы улучшить производительность измерений otdoa - Google Patents
Управление помехами, оптимизация sinr и усовершенствования сигнализации, чтобы улучшить производительность измерений otdoa Download PDFInfo
- Publication number
- RU2535191C2 RU2535191C2 RU2012100724/07A RU2012100724A RU2535191C2 RU 2535191 C2 RU2535191 C2 RU 2535191C2 RU 2012100724/07 A RU2012100724/07 A RU 2012100724/07A RU 2012100724 A RU2012100724 A RU 2012100724A RU 2535191 C2 RU2535191 C2 RU 2535191C2
- Authority
- RU
- Russia
- Prior art keywords
- base station
- otdoa
- identifier
- subframe
- prs
- Prior art date
Links
Images




Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W24/00—Supervisory, monitoring or testing arrangements
- H04W24/10—Scheduling measurement reports ; Arrangements for measurement reports
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L27/00—Modulated-carrier systems
- H04L27/26—Systems using multi-frequency codes
- H04L27/2601—Multicarrier modulation systems
- H04L27/2602—Signal structure
- H04L27/2603—Signal structure ensuring backward compatibility with legacy system
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S1/00—Beacons or beacon systems transmitting signals having a characteristic or characteristics capable of being detected by non-directional receivers and defining directions, positions, or position lines fixed relatively to the beacon transmitters; Receivers co-operating therewith
- G01S1/02—Beacons or beacon systems transmitting signals having a characteristic or characteristics capable of being detected by non-directional receivers and defining directions, positions, or position lines fixed relatively to the beacon transmitters; Receivers co-operating therewith using radio waves
- G01S1/08—Systems for determining direction or position line
- G01S1/20—Systems for determining direction or position line using a comparison of transit time of synchronised signals transmitted from non-directional antennas or antenna systems spaced apart, i.e. path-difference systems
- G01S1/30—Systems for determining direction or position line using a comparison of transit time of synchronised signals transmitted from non-directional antennas or antenna systems spaced apart, i.e. path-difference systems the synchronised signals being continuous waves or intermittent trains of continuous waves, the intermittency not being for the purpose of determining direction or position line and the transit times being compared by measuring the phase difference
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/02—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using radio waves
- G01S5/0205—Details
- G01S5/0236—Assistance data, e.g. base station almanac
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/02—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using radio waves
- G01S5/10—Position of receiver fixed by co-ordinating a plurality of position lines defined by path-difference measurements, e.g. omega or decca systems
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/02—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using radio waves
- G01S5/14—Determining absolute distances from a plurality of spaced points of known location
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L43/00—Arrangements for monitoring or testing data switching networks
- H04L43/08—Monitoring or testing based on specific metrics, e.g. QoS, energy consumption or environmental parameters
- H04L43/0852—Delays
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L5/00—Arrangements affording multiple use of the transmission path
- H04L5/003—Arrangements for allocating sub-channels of the transmission path
- H04L5/0048—Allocation of pilot signals, i.e. of signals known to the receiver
- H04L5/005—Allocation of pilot signals, i.e. of signals known to the receiver of common pilots, i.e. pilots destined for multiple users or terminals
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L5/00—Arrangements affording multiple use of the transmission path
- H04L5/0091—Signaling for the administration of the divided path
- H04L5/0094—Indication of how sub-channels of the path are allocated
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W4/00—Services specially adapted for wireless communication networks; Facilities therefor
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W64/00—Locating users or terminals or network equipment for network management purposes, e.g. mobility management
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W72/00—Local resource management
- H04W72/04—Wireless resource allocation
- H04W72/044—Wireless resource allocation based on the type of the allocated resource
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L27/00—Modulated-carrier systems
- H04L27/26—Systems using multi-frequency codes
- H04L27/2601—Multicarrier modulation systems
- H04L27/2647—Arrangements specific to the receiver only
- H04L27/2655—Synchronisation arrangements
- H04L27/2656—Frame synchronisation, e.g. packet synchronisation, time division duplex [TDD] switching point detection or subframe synchronisation
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02D—CLIMATE CHANGE MITIGATION TECHNOLOGIES IN INFORMATION AND COMMUNICATION TECHNOLOGIES [ICT], I.E. INFORMATION AND COMMUNICATION TECHNOLOGIES AIMING AT THE REDUCTION OF THEIR OWN ENERGY USE
- Y02D30/00—Reducing energy consumption in communication networks
Abstract
Изобретение относится к технике беспроводной связи и может быть использовано в беспроводных приемниках. Технический результат - сокращение времени измерения наблюдаемой разности времени поступления в беспроводном терминале. Беспроводной терминал принимает информацию сигнализации, относящуюся к передаче опорного сигнала, по меньшей мере, в одном специально назначенном подкадре, причем информация сигнализации включает в себя список, при этом список включает в себя идентификаторы базовых станций и взаимосвязь между, по меньшей мере, одним идентификатором базовой станции и шаблоном. Терминал определяет, по меньшей мере, из одного из идентификаторов базовых станций в списке и шаблона частотно-временные ресурсы, связанные с передачей опорного сигнала, предназначенной для измерений наблюдаемой разницы времени поступления (OTDOA) из передающей базовой станции, связанной с упомянутым одним идентификатором базовой станции. Измеряют время поступления передачи из передающей базовой станции относительно опорной синхронизации. 11 з.п. ф-лы, 7 ил.
Description
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к управлению помехами, оптимизации качества сигнала и усовершенствованиям сигнализации, чтобы улучшить производительность измерения наблюдаемой разности времени поступления (OTDOA) в беспроводных приемниках с целью содействия оценке позиции пользователя в беспроводных сетях.
УРОВЕНЬ ТЕХНИКИ
Беспроводные сети связи широко известны. Некоторые сети являются полностью уникальными, в то время как другие подчинены одному или более стандартам, чтобы позволить различным производителям изготавливать оборудование, такое как беспроводные терминалы, для типовой системы. Одной такой сетью, основанной на стандартах, является универсальная система мобильной связи (UMTS). UMTS стандартизована с помощью проекта партнерства третьего поколения (3GPP), сотрудничества между группами ассоциаций в области связи в рамках международного проекта 2000 в области мобильной связи международного союза электросвязи (ITU). В настоящее время продвигаются попытки, чтобы разработать стандарт усовершенствованной UMTS, который обычно упоминают как долгосрочное развитие (LTE) UMTS или наземный радиодоступ усовершенствованной UMTS (E-UTRA).
В соответствии с версией 8 стандарта или спецификации E-UTRA или LTE передачи нисходящей линии связи из базовой станции (также известной как “усовершенствованный узел В” или просто “eNB”) в беспроводной терминал или устройство связи (также известное, как “пользовательское оборудование” или “UE”) используют мультиплексирование с ортогональным частотным разделением (OFDM). В OFDM ортогональные поднесущие модулируют с цифровым потоком, который может включать в себя данные, управляющую информацию или другую информацию, таким образом, чтобы сформировать набор символов OFDM. Поднесущие могут быть смежными или несмежными, и модуляция данных нисходящей линии связи может быть выполнена с использованием квадратурной фазовой манипуляции (QPSK), квадратурной амплитудной модуляции 16-го порядка (16QAM), квадратурной амплитудной модуляции 64-го порядка (64QAM) или тому подобной. Символы OFDM конфигурируют в подкадр нисходящей линии связи для передачи из базовой станции. Каждый символ OFDM имеет некоторую длительность по времени и связан с циклическим префиксом (CP). Циклический префикс по существу является защитным периодом между последовательными символами OFDM в подкадре. В соответствии со спецификацией E-UTRA обычный циклический префикс приблизительно равен 5 микросекундам, а расширенный циклический префикс приблизительно равен 16,67 микросекундам.
В противоположность нисходящей линии связи, передачи восходящей линии связи из UE в eNB используют множественный доступ с частотным разделением с одной несущей (SC-FDMA), в соответствии со стандартом E-UTRA. В SC-FDMA передачу блока символов данных QAM выполняют сначала с помощью расширения (или предварительного кодирования) с дискретным преобразованием Фурье (DFT), за которым следует отображение поднесущей в традиционный модулятор OFDM. Использование предварительного кодирования DFT дает возможность умеренного кубического показателя/отношения максимальной к средней мощности (PAPR), дающего в результате уменьшенную стоимость, размер и потребление мощности усилителя мощности UE. В соответствии с SC-FDMA, каждая поднесущая, используемая для передачи восходящей линии связи, включает в себя информацию для всех переданных модулированных сигналов, причем входной поток данных расширяют по ним. Передачей данных в восходящей линии связи управляют с помощью eNB, включая передачу запросов планирования (и информации планирования), посланных с помощью управляющих каналов нисходящей линии связи. Предоставления планирования для передач восходящей линии связи предоставляют с помощью eNB в нисходящей линии связи, и они включают в себя, среди прочего, выделение ресурса (например, размер блока ресурса на интервал в одну миллисекунду (мс)) и идентификацию модуляции, используемой для передач восходящей линии связи. С дополнительной модуляцией более высокого порядка и адаптивной модуляцией и кодированием (AMC) возможна большая спектральная эффективность с помощью планирования пользователей с благоприятными состояниями канала.
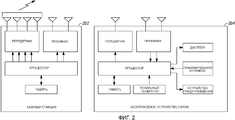
Системы E-UTRA также способствуют использованию антенных систем с множеством входом и множеством выходов (MIMO) в нисходящей линии связи, чтобы увеличить емкость. Как известно и проиллюстрировано на фиг.2, антенную систему MIMO используют в eNB 202 посредством использования множества антенн 204 передачи, а в UE посредством использования множества антенн приема. UE может полагаться на пилотные или опорные символы (RS), посланные из eNB 22, для оценки канала, последующую демодуляцию данных и измерение качества линии связи для сообщения. Измерения качества линии связи для обратной связи могут включать в себя такие пространственные параметры, как указатель ранга или число потоков данных, посланных в одних и тех же ресурсах, индекс матрицы предварительного кодирования (PMI) и параметры кодирования, такие как схема модуляции и кодирования (MCS) или указатель качества канала (CQI). Например, если UE определяет, что линия связи может поддерживать ранг, больший чем единица, оно может сообщить множество значений CQI (например, два значения CQI, когда ранг = 2). Кроме того, измерения качества линии связи могут сообщаться на периодической основе или апериодической основе, как проинструктировано с помощью eNB, в одном из поддерживаемых режимов обратной связи. Сообщения могут включать в себя выборочную информацию параметров частоты широкой полосы или подполосы. eNB может использовать информацию о ранге, CQI и другие параметры, такие как информация о качестве восходящей линии связи, чтобы обслуживать UE в каналах восходящей линии связи и нисходящей линии связи.
Также, как известно, современные сотовые телефоны включают в себя приемники системы глобального позиционирования (GPS), чтобы содействовать в определении местоположения устройств и их владельцев в случае экстренной необходимости и чтобы соответствовать поручениям Е-911 Федеральной комиссии по связи (FCC). При большинстве обстоятельств приемник GPS телефона может принимать сигналы из подходящего количества спутников GPS и передавать эту информацию в инфраструктуру сотовой системы для определения местоположения устройства, например, с помощью сервера определения местоположения, соединенного с беспроводной сетью или составляющего часть беспроводной сети. Однако имеются некоторые обстоятельства, при которых приемник GPS является неэффективным. Например, когда пользователь или его, или ее сотовый телефон находится внутри здания, приемник GPS может быть не в состоянии принимать сигналы из подходящего количества спутников GPS, чтобы дать возможность серверу определения местоположения определить позицию устройства. Кроме того, не требуется, чтобы беспроводные устройства в частных системах удовлетворяли поручениям E-911 FCC, и они могут не включать в себя приемник GPS. Однако могут возникать обстоятельства, при которых может быть необходимо определение местоположений беспроводных устройств, работающих в таких системах.
Чтобы компенсировать возможные периодические неэффективности системы GPS и обеспечить функциональные возможности определения местоположения в частных системах, многие беспроводные системы используют сигнализацию и включают в себя процессы, посредством которых может быть оценено местоположение беспроводного устройства. Например, во многих системах базовые станции регулярно передают опорные сигналы позиционирования, которые принимают с помощью беспроводных устройств и используют либо, чтобы определить информацию, на основании которой устройство инфраструктуры, такое как сервер определения местоположения, может вычислить (например, с помощью триангуляции и/или трилатерации) местоположение беспроводного устройства либо автономно определить местоположение беспроводного устройства (т.е. в самом беспроводном устройстве). Когда сервер определения местоположения предназначен для того, чтобы вычислять местоположение беспроводного устройства, беспроводное устройство может определить время поступления (TOA) или разность времени поступления (TDOA) после приема опорного сигнала позиционирования и передать TOA или TDOA в сервер определения местоположения с помощью обслуживающей базовой станции (т.е. базовой станции, предоставляющей услугу беспроводной связи в беспроводное устройство). Информацию TOA или TDOA обычно определяют на основании внутренних часов беспроводного устройства, установленных с помощью локального генератора, в соответствии с известными методиками.
На форуме беспроводных стандартов 3GPP проводится работа, чтобы предоставить средства для механизмов позиционирования, которые достигают равенства или даже превосходят функциональные возможности и производительность, предоставленные в настоящее время для других типов беспроводного доступа, включая GSM, WCDMA, 1xRTT и EV-DO. Задачей этой работы является включить поддержку функциональных возможностей и признаков позиционирования совместно с доступом LTE, в то же время гарантируя обратную совместимость с сетями и UE, которые поддерживают LTE и EPS, в соответствии с Rel-8 стандартов 3GPP. Желаемые функциональные возможности и признаки позиционирования включают в себя:
- протокол или протоколы позиционирования, совместимые и дающие возможность поддержки как для решения LCS плоскости управления для EPS, так и SUPL OMA;
- глобальную навигационную спутниковую систему (A-GNSS) с содействием UE и с содействием на основе UE;
- способ наземного позиционирования нисходящей линии связи, аналог E-OTD, OTDOA и AFLT, который может работать в режиме с содействием UE или режиме на основе UE (следует заметить, что будет определен один способ нисходящей линии связи); и
- усовершенствованные измерения ID соты, поступающие из UE и/или eNode B.
Предложены возможные расширения существующего сообщения измерения мобильности в Rel-8 LTE в поддержке способа нисходящей линии связи, такого как наблюдаемая разность времени поступления или OTDOA, или сокращенно способа OTD. Известны способы, которые являются сконцентрированными на UE (в которых UE может генерировать позиционное фиксирование без доставки с помощью сети дополнительных данных), а другие способы являются способами с содействием UE (в которых измерения UE доставляют в сеть или компонент сети, такой как сервер определения местоположения (LS), для комбинирования с другими данными, чтобы генерировать фиксирование местоположения).
Можно сообщать комбинацию физического идентификатора соты (PCID) целевой соты и мощность принятого опорного сигнала (RSRP) с добавлением информации об относительной синхронизации соты, измеренной с помощью UE, чтобы сформировать “триплет” измерения, т.е. PCID, RSRP и относительную синхронизацию соты, например, относительно некоторой опорной соты, обслуживающей соты, причем обслуживающая сота могла бы состоять из одной или более не совместно расположенных сот. Известны аналогичные подходы, поддерживаемые в системах WiMAX или обычных системах CDMA, включая WCDMA.
Применение таких методик известно, даже если сеть является несинхронной, включая случай, когда базовые станции, содержащие сеть, не выровнены во времени, но имеют известное взаимное смещение синхронизации.
А именно UE сообщает относительную синхронизацию как для синхронных, так и асинхронных сот, а затем сеть должна решить сделать какие-либо поправки для относительной синхронизации между BS (базовыми станциями), чтобы позволить выполнить фиксирование местоположения.
Сеть или LS дополнительно может передать относительную синхронизацию eNB, чтобы позволить UE выполнить автономные фиксирования (сконцентрированные на UE), но это также требует, чтобы сеть или LS были доступными для UE или защищенного объекта в UE, специфичные местоположения eNB, что для оператора сети может быть нежелательно.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Сопроводительные чертежи, на которых одинаковые ссылочные номера относятся к идентичным или функционально подобным элементам по всем отдельным видам и которые вместе с подробным описанием ниже включены в описание или составляют его часть, служат для того, чтобы дополнительно проиллюстрировать различные варианты осуществления и объяснить различные принципы и преимущества, в соответствии с одним или более вариантами осуществления настоящего изобретения.
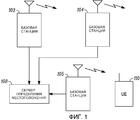
Фиг.1 - электрическая блок-схема беспроводной системы связи, предоставляющей услугу беспроводной связи в беспроводное устройство связи.
Фиг.2 иллюстрирует электрическую блок-схему примерной базовой станции, используемой в беспроводной системе связи фиг.2, и беспроводного устройства связи.
Фиг.3 - логическая блок-схема этапов, выполняемых с помощью базовой станции, чтобы генерировать подкадр нисходящей линии связи для передачи опорного сигнала позиционирования в беспроводное устройство связи.
Фиг.4 - логическая блок-схема этапов, выполняемых с помощью беспроводного устройства связи, чтобы обрабатывать подкадр нисходящей линии связи, содержащий опорный сигнал позиционирования.
Фиг.5 - логическая блок-схема этапов, выполняемых с помощью беспроводного устройства связи, чтобы обрабатывать подкадр нисходящей линии связи.
Фиг.6 - логическая блок-схема этапов, выполняемых с помощью беспроводного устройства связи, чтобы обрабатывать подкадр нисходящей линии связи.
Фиг.7 - логическая блок-схема этапов, выполняемых с помощью базовой станции, чтобы генерировать подкадр нисходящей линии связи для передачи в беспроводное устройство связи.
ПОДРОБНОЕ ОПИСАНИЕ
Помимо усовершенствования базовой последовательности опорного сигнала, может быть оптимизирована возможность наблюдения формы сигнала OTD (т.е. SINR) с использованием способов межсотового согласования (включая межсекторное), таких как способы COMP.
Один вариант осуществления, раскрытый в настоящей заявке, включает в себя способ межсотового или межсекторного согласования передачи усовершенствованного сигнала наблюдаемой разности времени (OTD). Например, множество eNB 103, 104, 105 (фиг.1), передающих усовершенствованные сигналы измерения OTD, могут делать это совместно, например, занимая одни и те же или связанные, но совместно или взаимно планируемые частотно-временные области. Если используют идентичные частотно-временные области, один “виртуальный” eNB для целей измерений OTD может быть сообщен с помощью UE 110. Такой “виртуальный” eNB может использовать форму сигнала измерения OTD или последовательность, отличную от последовательности eNB, содержащих совместную передачу. Такие совместные передачи предпочтительно могут быть сделаны с использованием синхронных передатчиков, работающих под управлением одного и того же eNB, например, совместно расположенных секторов стороны одной и той же базовой станции. В этом подходе совместно расположенные секторы передают одну и ту же форму сигнала в перекрывающихся частотно-временных ресурсах. В варианте осуществления все доступные PCID могут быть разделены на несвязные наборы S1, S2, …, SN, где S обозначает набор PCID, который может быть выделен разным совместно расположенным секторам (или, в качестве альтернативы, географически соседним секторам или сотам), управляемым с помощью одного и того же eNB. С точки зрения развертывания PCID является “ID сектора”, а индекс n Sn, который отображают в место данной базовой станции, является “ID места соты”. Затем ID места соты отображают в уникальную форму сигнала. Если развертывание места поддерживает удаленные антенны (например, с помощью RF (радиочастотной) передачи через волоконно-оптическую линию связи), eNB может совместно планировать передачу из одной или более удаленных антенн под управлением одного и того же eNB, причем, по меньшей мере, одна последовательность OTD отличается от последовательности родительского eNB, для целей оценки OTD. UE могут совместно оценивать OTD в каждый eNB, который совместно запланировал оптимизированный шаблон измерения. Совместная передача может быть ограничена только частичным поднабором блоков ресурсов (RB) в нисходящей линии связи, и eNB могут гибко планировать данные другим пользователям в RB, не использованных в содействии определения местоположения. Также было бы возможно назначать RB, которые частично заполнены пилот-сигналами определения местоположения, пользователю Rel.9 или Rel.10, который может подходящим способом согласовывать по скорости передачи данные около UE. Если вся часть PDSCH зарезервирована для содействия определению местоположения (с помощью сигнализации многоадресной широковещательной одночастотной сети (или MBSFN), или, в качестве альтернативы, одноадресной сигнализации), тогда eNB может использовать физический управляющий канал нисходящей линии связи (PDCCH), чтобы посылать дополнительную информацию содействия определению местоположения. Сигнализация MBSFN не является предпочтительной вследствие чрезмерных издержек (24 бита плюс дополнительные биты) в системной информации. В этом варианте осуществления способ в беспроводной базовой станции включает в себя совместное планирование и передачу последовательности с целью усовершенствования оценки OTD, по меньшей мере, из двух передатчиков. Дополнительно в этом варианте осуществления совместно планируемые частотно-временные ресурсы могут быть идентичными в каждом передатчике. В качестве альтернативы каждый передатчик может быть под управлением одного eNB. В качестве альтернативы переданную последовательность создают с помощью одного или более из следующего: PCID, глобального идентификатора соты (GCID), номера системного кадра (SFN), индекса подкадра, применимого идентификатора транзакции радиосети (RNTI) одной соты или канала измерения.
Один вариант осуществления относится к передаче усовершенствованного шаблона измерения межсотового OTD. Блоки системной информации (SIB) могли бы нести в себе расширенные шаблоны измерения, применимые к окружающим сотам, чтобы позволить UE 110 планировать оценки OTD этих сот. SIB могли бы быть транспортирующими (с помощью “списка соседей“ или подобного списка) взаимосвязь между PCID и “шаблоном”, или это могло быть задано в спецификациях 3GPP. Расширенные шаблоны измерений могли бы быть скомпонованы, в соответствии с шаблоном повторного использования, чтобы оптимизировать полустатические характеристики помех. Информация о шаблоне соседней соты также может быть определена с помощью считывания, по меньшей мере, части системной информации соседней соты (например, неиспользованных битов в первичном широковещательном канале (PBCH) или SIB). Шаблон измерения мог бы быть послан для каждой несущей. Например, шаблон измерения может быть послан вместе, по меньшей мере, с одним PCID и несущей частотой. Шаблон мог бы быть сигнализирован с возможностью включения в него, по меньшей мере, одного из следующего:
А) смещения подкадра(подкадров), в которых передают формы сигналов OTDOA (например, смещения относительно номера системного кадра или точки циклического возврата SFN);
b) периодичности подкадра(подкадров) OTDOA (например, множеств подкадров);
с) шаблона элемента частотно-временного ресурса (RE) в подкадре(подкадрах) OTDOA.
Базовая станция сигнализирует шаблоны измерения в UE в широковещательной передаче, что дает возможность UE определить взаимосвязь между принятым расширенным сигналом и соседней сотой, которая передала его. С помощью этого способа UE будет в состоянии определять частотно-временные ресурсы, в которых передают формы сигналов OTD из разных базовых станций. В этом варианте осуществления, относительно беспроводного терминала, способ включает в себя прием информации о расширенных шаблонах измерений, соответствующих сигналам OTD, применимым к обслуживающей соте и соседним сотам, в широковещательном сигнале (например, SIB) или сообщении конфигурации радио ресурсов (RRC). UE принимает список соседних сот вместе с взаимосвязью между PCID соседней соты и шаблоном измерения. Способ может включать в себя прием шаблона измерения, специфичного для несущей частоты. Способ может включать в себя прием шаблона измерения, который подчиняется определенному шаблону повторного использования частотно-временных ресурсов. Способ может включать в себя прием шаблона измерения с помощью считывания, по меньшей мере, части широковещательной передачи соседней соты (например, PBCH, SIB). Способ может включать в себя прием сигнализированного шаблона измерения из eNB, дополнительно состоящего из приема, по меньшей мере, одного из следующего: смещения подкадра(подкадров) OTDOA относительно опорной точки (например, точки циклического возврата SFN), периодичности подкадра(подкадров) OTDOA, шаблона RE в подкадре(подкадрах) OTDOA.
Другие варианты осуществления относятся к предоставлению поддержки протокола в измерениях OTDOA. Способам уровня 1/уровня 2 будет необходимо поддерживать протоколы позиционирования, как SUPL 2.0. UE 110 может составить список базовых станций 103-105, которые оно может измерить в некотором порядке (например, RSRP, RS-SINR и т.д.) и может запросить, чтобы сеть (NW) послала информацию о форме сигналов OTDOA из сот, которые оно может измерить. NW может послать частотно-временную информацию, соответствующую передачам, по меньшей мере, из поднабора запрошенных базовых станций. Относительно беспроводного терминала этот вариант осуществления включает в себя способ в беспроводном терминале идентификации и составления списка базовых станций, в соответствии с определенным порядком ранжирования (например, RSRP, RS-SINR). Способ может включать в себя посылку списка соседних сот в eNB с целью передачи форм сигналов OTDOA. Относительно беспроводной базовой станции этот вариант осуществления включает в себя способ в беспроводной базовой станции приема сообщения из UE, содержащего информацию, по меньшей мере, относительно одной базовой станции 103, 104, 105, которую может видеть UE. Способ может включать в себя прием частотно-временной информации, соответствующей формам сигналов OTDOA, из одной или более базовых станций (например, в Х2 или из сервера 108 определения местоположения). Способ дополнительно может включать в себя передачу частотно-временной информации, соответствующей формам сигналов OTDOA, которые будут использовать разные базовые станции (в SIB или RRC или PDCCH).
Другой вариант осуществления относится к конфигурации межчастотного промежутка для измерений OTDOA. Поскольку помеха на обслуживающей несущей частоте является функцией нагрузки в обслуживающих/соседних сотах, можно было бы закончить со сценарием, в котором ухудшены измерения OTDOA обслуживающих/соседних сот. Могло бы быть предпочтительным конфигурировать UE с возможностью измерения OTDOA сот на других несущих, где нагрузка является малой. В этом случае NW сначала может сконфигурировать UE с возможностью обнаружения и сообщения RSRP и т.д. сот, которые оно может видеть, на определенной несущей частоте. Затем NW может сконфигурировать измерения OTDOA при содействии промежутка на этих межчастотных несущих. На основании “возможности слышать” соту на определенном уровне, который может быть выведен с помощью NW на основании сообщений RSRP/RSRQ из UE, NW может сконфигурировать конкретное UE с возможностью выполнения измерений OTDOA в определенной соте на определенной несущей частоте. SFN и синхронизация подкадра OTDOA на межчастотной несущей могли бы быть неизвестными обслуживающей соте в асинхронной сети. В этом случае UE может считать MIB определенной соты на межчастотной несущей и послать его в обслуживающую соту, таким образом, чтобы она могла обеспечить промежутки в подходящие моменты времени. В зависимости от структуры и периодичности подкадра OTDOA новые шаблоны промежутка могли бы быть определены в спецификациях RRC/RRM. Например, если все формы сигналов OTDOA передают в одном подкадре, могла бы требоваться длина промежутка передачи (TGL), равная, по меньшей мере, 2 мс (= 1 мс приема сигнала + время RF переключения 2*0,5). Для синхронных развертываний могла бы быть необходима TGL, равная 3 мс, так как оказывается влияние на подкадр до и подкадр после OTDOA. Также, если форму сигнала OTDOA передают широковещательным способом с периодичностью, например, 240 мс, периодичность промежутка предпочтительно должна бы быть 240 мс или кратна этому. Конфигурация шаблона промежутка и смещение могут быть выполнены для каждого UE с помощью сообщений RRC. Конфигурация шаблона промежутка может быть явно выведена с помощью UE, как часть сообщения RRC, содержащего информацию о местоположении, посланную в UE. Этот вариант осуществления относительно беспроводного терминала включает в себя прием команды конфигурации межчастотного измерения из NW. Способ может включать в себя идентификацию и выполнение измерений RSRP или качества принятого опорного сигнала (RSRQ) и инициирование сообщения о сотах на определенной сконфигурированной межчастотной несущей. Способ может включать в себя обнаружение синхронизации SFN с помощью считывания MIB для соты на межчастотной несущей и, сообщенной в обслуживающую соту. Способ может включать в себя прием команды из NW, чтобы начать выполнение измерений OTDOA. Способ может включать в себя прием команды, причем команда включает в себя информацию относительно моментов времени, в которые разрешены промежутки передачи из обслуживающей соты (например, с помощью конфигурации промежутка измерения OTDOA и последующего удаления после истечения времени таймера или сообщения измерения). Относительно беспроводной базовой станции этот вариант осуществления может включать в себя прием сообщения измерения, состоящего из PCID и RSRP/RSRQ на определенной межчастотной несущей из UE. Способ может включать в себя прием информации о SFN обнаруженных сот из UE. Способ может включать в себя определение временного местоположения подкадров OTDOA, соответствующих соседним сотам, по меньшей мере, из одного PCID, сообщенного SFN и т.д. Способ может включать в себя конфигурирование промежутка измерения OTDOA для UE, чтобы дать возможность ему переключиться на определенную несущую частоту. Способ может включать в себя остановку промежутка измерения в ответ на истечение времени таймера или прием сообщения измерения OTDOA из UE.
Еще один вариант осуществления относится к сигнализации временных местоположений опорного сигнала позиционирования (PRS), несущей частоты, списка соседних сот и другой побочной информации. Вообще понятно, что для оценки местоположения будет использована OTDOA. Этот алгоритм зависит от способности UE “слышать” сигналы из eNB, отличные от обслуживающего eNB. Исследования показывают, что существующие обычные опорные символы не являются адекватными из перспективы возможности слышать. Таким образом, многими компаниями предложено, чтобы новые опорные символы позиционирования (PRS) периодически передавались из каждого eNB. PRS были бы периодически переданы в специальных подкадрах “PRS”. Следует заметить, что любой заданный eNB будет передавать только в части элементов ресурсов (RE) в подкадре. По меньшей мере, в одном осуществлении все RE, отличные от RE, назначенных управляющим символам и PRS, были бы не использованы данным eNB.
В синхронной системе передачи PRS синхронизированы между всеми eNB. Это имеет несколько преимуществ, включая:
1. UE может слышать другие eNB в течение подкадра PRS в любом RE, который eNB не использует, чтобы передавать управляющие сигналы или сигналы PRS. Таким образом, в течение, по меньшей мере, части подкадра PRS обслуживающий eNB заглушают. В этих RE помехи существенно уменьшают, и UE может легко слышать другие eNB.
2. Существенно уменьшают усилие поиска UE. UE должно искать только подкадры PRS для последовательностей PRS (которые находятся в подкадре PRS).
В асинхронной системе подкадры не синхронизированы и, следовательно, из этого следует, что PRS не синхронизированы. Вообще, допускается, что никакой взаимосвязи по синхронизации нет между подкадрами PRS, переданными из разных eNB. В таком случае больше невозможно для eNB давать возможность UE лучше слышать все остальные eNB с помощью собственного заглушения одного подкадра (хотя, если обслуживающий eNB PRS знает о том, когда соседние eNB посылают подкадры PRS, eNB может заглушаться, чтобы позволить UE слышать передачи PRS из выбранных соседних сот). Таким образом, в асинхронной системе возможность слышать ухудшается, если обслуживающий eNB не заглушается во время передач подкадра PRS каждого из соседних eNB.
Кроме того, поскольку подкадры PRS в не обслуживающих eNB не синхронизированы с подкадрами обслуживающего eNB, UE не знает, где искать подкадры PRS, и тогда для UE было бы необходимо постоянно сканировать последовательности PRS. В этом случае проблема является фактически более сложной, чем обнаружение SCH. Для обнаружения SCH UE может быть гарантировано, что передача SCH находится в любых 6 последовательных подкадрах. Таким образом, UE может сканировать SCH не в режиме реального времени с помощью буферизации 6 мс выборок. Подкадры PRS могли бы быть посланы только один раз каждые 100 подкадров, для UE было бы необходимо захватывать 101 мс выборок, чтобы осуществить сканирование не в реальном времени для последовательностей PRS.
Наконец, следует заметить, что для целей определения местоположения UE должно обнаруживать сигналы из соседних eNB на уровнях сигналов, более низких, чем уровни, требуемые для обнаружения поиска соты RRM с помощью канала синхронизации. Таким образом, набор соседних eNB (и соответствующая синхронизация), обнаруженных с помощью UE с помощью поиска соты RRM, является недостаточным, чтобы идентифицировать eNB, которые должны быть измерены для целей определения местоположения.
В итоге, в асинхронной системе, в которой подкадры PRS не синхронизированы:
i) UE не знает, где искать последовательности PRS, так как оно не знает местоположения подкадра PRS;
ii) UE не знает, какие eNB PRS находятся вблизи и, следовательно, не знает, какие последовательности PRS искать.
Без какого-нибудь содействия из обслуживающего eNB обнаружение PRS является значительно более сложным и трудным, и вычислительно сложным, чем обнаружение SCH.
Дополнительно следует заметить, что слепое обнаружение последовательностей PRS в очень большом пространстве поиска будет выполняться очень плохо. Слепое обнаружение последовательности PRS будет требовать того, что каждая последовательность PRS была скоррелирована со всеми возможными гипотезами синхронизации в течение 100 мс, для ширины полосы 10 MHz требуемое число корреляций на последовательность PRS превышало бы 1,5 миллиона. Для слепого обнаружения заявители обычно брали бы синхронизацию, соответствующую максимуму этих корреляций. Однако для слабого сигнала максимум большого числа корреляций при отсутствии желаемого сигнала обычно будет превышать корреляцию с наличием желаемого сигнала и, следовательно, оценка синхронизации будет некорректной. Для того чтобы ограничить сложность и улучшить производительность, необходимо ограничить рамки пространства поиска. Для того чтобы сделать это, предлагается следующее.
При инициировании запроса на определение местоположения от UE или от другого источника eNB должно:
i) сигнализировать в UE индексы (предварительно определенных) последовательностей PRS, которые UE должно искать; и
ii) сигнализировать в UE местоположение (информацию синхронизации) подкадра PRS, соответствующего каждой последовательности PRS.
Эта информация также может быть периодически передана широковещательным способом в сообщении SIB.
В асинхронной системе подкадр PRS каждой соседней соты будет частично перекрывать два из подкадров обслуживающего eNB (иначе два eNB являются синхронными). Таким образом, eNB сигнализировал бы UE с индексом первого подкадра (обслуживающей соты), с которым будет перекрываться следующий подкадр PRS соседней соты. Затем UE искало бы в течение интервала времени 2 мс, начинающегося с началом индекса подкадра, последовательность PRS соседней соты. Таким образом, интервал поиска уменьшен с 101 мс до 2 мс.
Разрешение информации о синхронизации, доступной для eNB, относительно синхронизации подкадра PRS соседнего eNB может быть значительно меньше, чем длительность подкадра 1 мс. В этом случае eNB дополнительно может уменьшить пространство поиска мобильной станции для соседнего подкадра PRS с помощью предоставления более точной информации о синхронизации в UE. В частности, eNB мог бы сигнализировать мобильной станции как с индексом подкадра, так и индексом символа для первого подкадра/символа, с которым перекрывается следующий подкадр PRS. В этом случае UE искало бы этот символ и следующие последовательные N символов для последовательности PRS, где N - число символов на подкадр. В качестве альтернативы eNB может послать эту информацию о синхронизации в UE с полным разрешением, чтобы минимизировать интервал поиска последовательности PRS для UE.
Периодичность подкадров PRS может быть конфигурируемой с помощью сети. Если так, периодичность должна быть включена в широковещательную передачу SIB. Вообще, не все сети могут выбирать одну и ту же периодичность для подкадра PRS. Кроме того, не все eNB могут использовать одну и ту же периодичность. В зависимости от нагрузки сети eNB может выбирать, чтобы передать широковещательным способом подкадры PRS либо более, либо менее часто. В одном таком осуществлении можно определить самый короткий интервал времени T для периодической передачи сигнала PRS. Вместо использования этого самого короткого интервала времени некоторые сети и/или eNB в сети могут использовать целое кратное этому базовому интервалу времени T для периодической передачи PRS. Однако в этом случае время передачи должно быть определено таким образом, чтобы в синхронной сети любые eNB, использующие одно и то же кратное N базового интервала времени T, были выровнены по времени для того, чтобы как упростить поиск PRS, так и улучшить возможность слышать PRS. Если информацию PRS сигнализируют в SIB, SIB должен включать в себя уровни частот, на которых передают подкадры PRS.
В ряде случаев сеть может поддерживать передачи PRS только на некоторых частотных уровнях, а не на других, таким образом, чтобы минимизировать связанные издержки. В качестве альтернативы может быть, что имеется недостаточно “слышимых” eNB на частотном уровне для UE, чтобы получить достаточное число измерений TOA, чтобы получить надежную оценку местоположения. В таких случаях будет необходимо для сети сигнализировать частотный уровень в UE, дополнительно к индексу и синхронизации передачи PRS. Если частотный уровень, на котором передают PRS, отличается от несущей обслуживающей соты, обслуживающая сота должна сконфигурировать промежуток измерения OTDOA. Обслуживающая сота не должна планировать данные DL и/или UL, чтобы дать возможность UE сдвинуть свою RF в целевой частотный уровень и выполнить измерения. В таком сценарии eNB должен сигнализировать синхронизацию этого промежутка в UE (например, индекс SFN/индекс подкадра/индекс символа, соответствующий началу промежутка, длительности промежутка и т.д.).
Для того чтобы улучшить возможность слышать, последовательности PRS могут периодически изменяться относительно либо набора элементов ресурсов, которые назначены, либо последовательности значений, назначенных в эти RE. Если так, специфичная для UE сигнализация или сообщение MIB должны предоставить достаточную информацию, чтобы указать текущее состояние последовательности PRS для данного eNB. Например, если передача PRS периодически сдвигается между N значений, должен быть предоставлен индекс, дающий состояние PRS в момент времени следующей передачи.
Некоторые аспекты, связанные с сигнализацией, являются следующими:
1. Измерения OTDOA, вероятно, будут выполнены в подкадре PRS или в течение подкадра с малыми помехами (например, в течение CRS с заглушением обслуживающей соты) в Rel-9 LTE, в то время как в UTRA измерения выполняют в CPICH (FDD) или другом сигнализированном канале (TDD), когда обслуживание предоставляет промежуток IPDL (т.е. набор интервалов времени, в которых обслуживающая сота заглушает передачу).
2. Возможны три сценария развертывания. В этой заявке понятие “подкадр OTDOA” используют, чтобы указать подкадр, который UE использует для измерения OTDOA, независимо от того, содержит ли он передачу PRS или только передачу CRS с заглушением обслуживающей соты.
а) Синхронный - для этого все из подкадров OTDOA выровнены, а номера SFN разных сот могут быть выровнены или не выровнены. UE должно искать PRS в небольшом поисковом окне передачи PRS обслуживающей соты (например, размер поискового окна (или SWS) = 3*CP~15 мкс для нормального CP, UE может искать подкадры OTDOA из занесенных в список соседних сот в +/-SWS подкадра OTDOA обслуживающей соты).
b) Частично выровненный - для этого случая подкадры OTDOA имеют частичное перекрытие, например, 500 мкс. UE должно искать передачу PRS из соседних сот, например, в одном подкадре PRS обслуживающей соты (например, поисковое окно = 1 подкадру). Даже для этого случая номера SFN обслуживающей и соседней сот могут быть выровнены или не выровнены. Для этого случая более чем один подкадр может быть использован для передачи PRS (например, могут быть переданы два или более последовательных подкадров со специфичными шаблонами PRS), таким образом, чтобы перекрытие подкадров OTDOA было равно, по меньшей мере, 1 мс между всеми передающими базовыми станциями). Также передача из определенной базовой станции может быть заглушена (например, для обслуживающей соты) в течение двух или более последовательных подкадров. Может быть возможным использовать комбинацию того и другого, заглушить определенный поднабор базовых станций в течение двух или более последовательных подкадров, в то время как другой поднабор базовых станций передает подкадры OTDOA в течение двух или более последовательных подкадров.
с) Асинхронный - для этого случая подкадры OTDOA могут не иметь никакого перекрытия. Для этого случая номера SFN не выровнены. Для этого случая размер поискового окна может быть установлен в максимальную периодичность передачи подкадра OTDOA (например, если максимальная периодичность передачи подкадра OTDOA равна 320 мс, установка размера поискового окна = 320 мкс позволит UE искать все соседние соты в +/- SWS подкадра OTDOA обслуживающей соты). Дополнительное содействие может быть предоставлено UE с помощью сигнализации грубого смещения синхронизации ближайшего подкадра OTDOA соседней соты относительно обслуживающей соты. В качестве альтернативы для асинхронного случая могло бы быть, что специально назначенные передачи PRS могут не иметь никакой выгоды относительно использования CRS + заглушение обслуживающей соты. Для этого случая было бы полезным сигнализировать смещение подкадра соседних сот относительно обслуживающей соты и связанную неопределенность синхронизации, чтобы помочь обработке UE. Передача CRS имеет периодичность 10 мс, а знание смещения синхронизации подкадра в радиокадре помогло бы UE ограничить свой объем корреляции шаблона CRS, соответствующего случаю заглушенного подкадра(подкадров) из обслуживающей соты. Например, длина шаблона CRS может быть установлена в 1 мс + неопределенность синхронизации, связанная с синхронизацией подкадра соседней соты, вместо корреляции принятого сигнала 1 мс с шаблоном 10 мс. Эта вспомогательная сигнализация уменьшает сложность и улучшает производительность.
Чтобы охватить все возможные случаи, сигнализация должна включать в себя следующее.
i) Обслуживающие eNB сигнализируют сценарий развертывания (например, синхронный, частично выровненный или асинхронный) непосредственно или с помощью размера поискового окна (например, SWS = 3*CP для синхронного, SWS = 0,5 мс или 1 мс для частично выровненного и SWS = большой для асинхронного).
ii) Обслуживающий eNB сигнализирует список PCID или ID мест, для которых подкадры OTDOA могут быть найдены в пределах поискового окна, соответствующего всем соседним сотам.
iii) Обслуживающий eNB сигнализирует разность SFN-SFN между самим собой и соседними сотами (в качестве альтернативы, обслуживающий eNB мог бы просто передавать “исходное значение” дельта, соответствующее состоянию передачи PRS из соседней соты).
iv) Обслуживающая сота сигнализирует информацию о частоте, связанную с соседней сотой. Разные частотные уровни могли бы иметь разные списки соседних сот, и только поднабор всех возможных частотных уровней может быть использован для передачи подкадра OTDOA.
v) Для асинхронного случая обслуживающий eNB может предоставить грубую синхронизацию подкадра OTDOA для соседних сот относительно самого себя вместо сигнализации размера поискового окна.
vi) Для асинхронного случая обслуживающий eNB может сигнализировать случай заглушения обслуживающей соты. UE ищет все соседние соты в заглушенном подкадре(подкадрах). Вспомогательные данные могут включать в себя набор PCID и, дополнительно, могут включать в себя смещения подкадров соседних сот (поскольку передача CRS повторяется один раз каждые 10 мс) относительно обслуживающего eNB и связанную неопределенность синхронизации, чтобы помочь обработке UE.
Другой вариант осуществления относительно беспроводного терминала может включать в себя прием информации сигнализации, относящейся к передаче опорного сигнала, в специально назначенных подкадре(подкадрах) (также упомянутых подкадрами OTDOA), которые имеют шаблон повторения во времени (например, один/два подкадр(подкадра) каждые N = 320 подкадров назначен(назначены) как подкадр(подкадры) OTDOA для обслуживающей базовой станции и соседних базовых станций, который включает в себя список PCID или места ID для базовой станции 103, 104, 105. Способ может включать в себя прием информации о частотном уровне, соответствующей обслуживающей и соседним базовым станциям. Способ дополнительно может включать в себя прием минимальной ширины полосы измерения, связанной с передачей опорного сигнала, с целью измерений OTDOA, применимых ко всем соседним сотам. Способ дополнительно может включать в себя прием информации о типе развертывания, относящейся к тому, что выровнены ли, выровнены ли частично или являются ли асинхронными передачи подкадров из обслуживающей и соседней сот, с помощью прямого указания или с помощью размера поискового окна UE. Способ может включать в себя прием системной синхронизации соседних сот относительно обслуживающей соты, это может быть разностью синхронизации SFN-SFN и/или разностью между состояниями передачи PRS для каждой соседней соты относительно обслуживающей соты. Способ может включать в себя прием указания, чтобы использовать CRS для измерений OTDOA и информации, относящейся к заглушенному подкадру(подкадрам) из обслуживающей соты (например, SFN + номер подкадра) в течение которого, как ожидают, UE будет выполнять измерения OTDOA соседних сот, или дополнительно, прием разности синхронизации между подкадрами для соседних сот относительно обслуживающей соты. Способ может включать в себя определение частотно-временных ресурсов, связанных с передачей опорного сигнала, предназначенного для измерений OTDOA. Способ может дополнительно включать в себя измерение времени поступления передачи из базовой станции относительно опорной синхронизации.
Другой вариант осуществления относится к обмену информацией о синхронизации PRS между eNB. Обслуживающий eNB может обнаружить синхронизацию подкадров PRS своих соседних сот с использованием интерфейсов S1 или X2 (например, номера SFN и индекса подкадра соседних сот относительно своей собственной синхронизации). Если как обслуживающий eNB, так и соседний eNB имеют GPS, тогда они могут обмениваться системными временами GPS, соответствующими передаче своих соответственных подкадров PRS. В случаях, в которых обслуживающий и/или соседний eNB не имеют доступа к системному времени GPS, должны быть использованы другие способы, чтобы сообщать это смещение синхронизации. В другом таком способе обслуживающий eNB запрашивал бы, чтобы соседний eNB предоставил интервал времени, пока он не передает свой следующий подкадр PRS, и в ответ соседний eNB сообщал бы этот интервал времени. Для того чтобы интерпретировать эту информацию, обслуживающий eNB должен был бы знать полную задержку между самим собой и соседним eNB для интерфейса S1 или X2. Эта задержка может быть откалибрована с использованием протоколов, таких как протоколы, идентифицированные в IEEE 1588. На основании информации о системной синхронизации второй базовой станции первая базовая станция затем планирует передачу опорных сигналов OTDOA с использованием информации о синхронизации, причем передачу планируют таким образом, что передачи опорного сигнала OTDOA из первой и второй базовых станций по существу перекрываются во времени, и опорные сигналы OTDOA из первой и второй базовых станций по существу являются разными. Опорный сигнал содержит последовательность символов, переданных в течение набора частотно-временных ресурсов. Если либо использованная последовательность, либо частотно-временные ресурсы, использованные для передачи опорного сигнала являются разными между двумя базовыми станциями, опорные сигналы являются разными.
Этот вариант осуществления учитывает вероятность, что передачи PRS в Rel-9 LTE могут быть полностью выровненными или частично выровненными. Установление синхронизации между базовыми станциями, вероятно, будет сделано с помощью GNSS (GNSS)/GPS и/или связи между базовыми станциями через X2. А именно, для LTE синхронизация подкадров OTDOA и связанное состояние генераторов случайных чисел (например, номера SFN), связанных с этой передачей, были бы полезными величинами, чтобы сигнализировать в UE, чтобы содействовать обработке UE. Этот вариант осуществления может включать в себя обмен информацией о синхронизации передачи подкадра OTDOA базовой станции со второй базовой станцией через интерфейс S1 или X2, где информация о сигнализации может быть опорными системными временами (например, GNSS, GPS), соответствующими подкадрам OTDOA. Информация о синхронизации может быть разностью SFN-SFN связанных передач из двух сот или специфично просто разностью между состояниями, соответствующей передачам PRS из двух сот. Информация о синхронизации может соответствовать времени для следующей передачи PRS с момента времени сигнализации. Способ может дополнительно включать в себя обмен другой побочной информацией, включающей в себя периодичность передачи PRS, информацию о синхронизации, связанную с третьей базовой станцией и т.д.
Таким образом, можно видеть, что беспроводной терминал (UE 110, фиг.1) принимает информацию сигнализации, относящуюся к передаче опорного сигнала, по меньшей мере, в одном специально назначенном подкадре, причем информация сигнализации включает в себя список, при этом список включает в себя идентификаторы базовых станций, как это изложено на этапе 501 (фиг.5). Беспроводной терминал определяет, по меньшей мере, из одного из идентификаторов базовых станций в списке частотно-временные ресурсы, связанные с передачей опорного сигнала, предназначенного для измерений наблюдаемой разности времени поступления (OTDOA) из передающей базовой станции, связанной с упомянутым одним идентификатором базовой станции, в блоке 502. Время поступления передачи из передающей базовой станции, относительно опорной синхронизации, измеряют на этапе 503. Эта новая операция настоящего изобретения может быть выполнена под управлением программы, выполняющейся в процессоре в UE 110, таком как процессор, проиллюстрированный в беспроводном терминале (фиг.2).
В соответствии с другим вариантом осуществления беспроводной терминал (UE 110, фиг.1) принимает команду из обслуживающей соты (базовой станции 103, 104 или 105), чтобы начать выполнение межчастотного измерения OTDOA на частотном уровне, содержащем опорные сигналы, причем частотный уровень отличается от обслуживающего частотного уровня, при этом обслуживающий частотный уровень не содержит опорных сигналов позиционирования, как указано на этапе 601 на фиг.6. Беспроводной терминал 110 может выполнить измерения OTDOA после приема команды на несущей частоте, отличной от несущей частоты обслуживающей соты, на этапе 602. Эта новая операция настоящего изобретения может быть выполнена под управлением программы, выполняющейся в процессоре в UE 110, таком как процессор, проиллюстрированный в беспроводном терминале фиг.2.
В соответствии с еще одним вариантом осуществления передатчик базовой станции (пример передатчика проиллюстрирован на фиг.2) может совместно планировать передачу опорного сигнала из множества передатчиков базовых станций (в базовых станциях 103-105) с целью усовершенствования оценки OTD, как указано на этапе 701 на фиг.7. Базовые станции 103-105 могут передавать идентичные опорные сигналы из множества передатчиков базовых станций, причем опорные сигналы являются идентичными как в последовательности сигналов, так и частотно-временных ресурсах, используемых для передачи. Эта новая операция настоящего изобретения может быть выполнена под управлением программы, выполняющейся в процессоре в каждой из базовых станций, таких как процессоры, проиллюстрированные в базовых станциях 103, 104, 195 (фиг.1 и 2).
В вышеприведенном описании описаны специфичные варианты осуществления. Однако специалист в данной области техники понимает, что могут быть сделаны различные модификации и изменения, не выходя за рамки объема изобретения, как изложено в формуле изобретения ниже. Таким образом, описание и фигуры должны быть рассмотрены в иллюстративном, а не ограничительном смысле, и подразумевают, что все такие модификации должны быть включены в рамки объема настоящих идей.
Выгоды, преимущества, решения проблем и любой элемент(элементы), которые могут вызвать какую-либо выгоду, преимущество или решение, чтобы случаться или становиться более явными, не должны быть истолкованы как критичные, необходимые или существенными признаками элементов любого или всех пунктов формулы изобретения. Изобретение определено только с помощью прилагаемой формулы изобретения, включая любые изменения, сделанные во время делопроизводства по этой заявке, и все эквиваленты этой формулы изобретения, которые изданы.
Кроме того, в этом документе относительные термины, такие как первый и второй, верхний и нижний, и тому подобные могут быть использованы только, чтобы отличать один объект или действие от другого объекта или действия, без обязательного требования или применения любой фактической такой взаимосвязи или последовательности между такими объектами или действиями. Термины “содержит”, ”содержащий”, ”имеет”, ”имеющий”, ”включает в себя”, ”включающий в себя”, ”вмещает”, ”вмещающий” или любые другие их варианты предназначены охватывать не исключающее включение, так что процесс, способ, изделие производства или устройство, которое содержит, имеет, включает в себя, вмещает в себя список элементов, не только включает в себя эти элементы, но может включать в себя другие элементы, явно неперечисленные или свойственные такому процессу, способу, изделию производства или устройству. Элемент, которому предшествует “содержит …”, ”имеет …”, ”включает в себя …”, ”вмещает …”, без больших ограничений, не препятствует существованию дополнительных идентичных элементов в процессе, способе, изделии производства или устройстве, которое содержит, имеет, включает в себя, вмещает элемент. Единственное число определяется в настоящей заявке как один или более, если иное явно не указано. Термины “по существу”, “существенно”, “приблизительно”, “около” или любые другие их версии определены как «близкие к», как понятно специалистам в данной области техники, и в одном не ограничивающем варианте осуществления термин определен, как находящийся в пределах 10%, в другом варианте осуществления в пределах 5%, в другом варианте осуществления в пределах 1%, а в другом варианте осуществления в пределах 0,5%. Термин “соединенный”, использованный в настоящей заявке, определен как подключенный, хотя необязательно непосредственно и необязательно механически. Устройство или структура, которая “сконфигурирована” определенным способом, сконфигурирована, по меньшей мере, этим способом, но также может быть сконфигурирована способами, которые не перечислены.
Будет понятно, что некоторые варианты осуществления могут использовать один или более универсальных или специализированных процессоров (или “обрабатывающих устройств”), таких как микропроцессоры, процессоры цифровых сигналов, заказных процессоров и вентильных матриц, программируемых пользователем (FPGA), и уникальных хранимых программных инструкций (включая как программное обеспечение, так и программно-аппаратное обеспечение), которые управляют одним или более процессорами, чтобы осуществлять, совместно с определенными схемами не процессора, некоторые, большинство или все из функций способа и/или устройства, описанных в настоящей заявке. В качестве альтернативы некоторые или все функции могли бы быть осуществлены с помощью конечного автомата, который не имеет хранимых программных инструкций, или в одной или более специализированных интегральных схем (ASIC), в которых каждая функция или некоторые комбинации определенных функций осуществлены как заказная логическая схема. Конечно, могла бы быть использована комбинация двух подходов.
Кроме того, вариант осуществления может быть осуществлен как компьютерно-читаемый носитель памяти, имеющий хранимый на нем компьютерно-читаемый код для программирования компьютера (например, содержащего процессор) для выполнения способа, описанного и заявленного в настоящей заявке. Примеры таких компьютерно-читаемых носителей памяти включают в себя жесткий диск, CD-ROM, оптическое запоминающее устройство, магнитное запоминающее устройство, ROM (постоянное запоминающее устройство), PROM (программируемое постоянное запоминающее устройство) EPROM (стираемое программируемое постоянное запоминающее устройство), EEPROM (электрически стираемое программируемое постоянное запоминающее устройство) и флэш-память, но не ограничены ими. Кроме того, предполагают, что специалист, несмотря на, возможно, существенное усилие и множество выборов конструирования, побужденный, например, имеющимся временем, современной технологией и экономическими соображениями, руководимый концепциями и принципами, раскрытыми в настоящей заявке, без труда сможет генерировать такие инструкции программного обеспечения и программы, и интегральные схемы с минимальным экспериментированием.
Реферат раскрытия предоставлен для того, чтобы позволить читателю быстро выяснить сущность технического раскрытия. Он представлен с пониманием, что не будет использован, чтобы интерпретировать или ограничить рамки объема или сущности формулы изобретения. Кроме того, в предшествующем подробном описании можно видеть, что различные признаки сгруппированы вместе в различных вариантах осуществления с целью упрощения раскрытия. Этот способ раскрытия не должен быть интерпретирован как отражение стремления, что заявленные варианты осуществления требуют больше признаков, чем явно перечислено в каждом пункте формулы изобретения. Вместо этого, как отражает следующая формула изобретения, предмет изобретения заключается в менее чем всех признаках одного раскрытого варианта осуществления. Таким образом, последующая формула изобретения включена в подробное описание, причем каждый пункт формулы изобретения говорит сам за себя как отдельно заявленный предмет изобретения.
Claims (12)
1. Способ измерения наблюдаемой разности времени поступления (OTDOA) в беспроводном терминале, включающий в себя этапы, на которых
принимают информацию сигнализации, относящуюся к передаче опорного сигнала в, по меньшей мере, одном специально назначенном подкадре, причем информация сигнализации включает в себя список, при этом список включает в себя идентификаторы базовых станций и взаимосвязь между, по меньшей мере, одним идентификатором базовой станции и шаблоном,
определяют из, по меньшей мере, одного из идентификаторов базовых станций в списке и шаблона, частотно-временные ресурсы, связанные с передачей опорного сигнала, предназначенной для измерений наблюдаемой разности времени поступления (OTDOA) из передающей базовой станции, связанной с упомянутым одним идентификатором базовой станции, и
измеряют время поступления передачи из передающей базовой станции относительно опорной синхронизации.
принимают информацию сигнализации, относящуюся к передаче опорного сигнала в, по меньшей мере, одном специально назначенном подкадре, причем информация сигнализации включает в себя список, при этом список включает в себя идентификаторы базовых станций и взаимосвязь между, по меньшей мере, одним идентификатором базовой станции и шаблоном,
определяют из, по меньшей мере, одного из идентификаторов базовых станций в списке и шаблона, частотно-временные ресурсы, связанные с передачей опорного сигнала, предназначенной для измерений наблюдаемой разности времени поступления (OTDOA) из передающей базовой станции, связанной с упомянутым одним идентификатором базовой станции, и
измеряют время поступления передачи из передающей базовой станции относительно опорной синхронизации.
2. Способ по п.1, дополнительно включающий в себя этап, на котором
принимают информацию сигнализации, включающую в себя шаблон, соответствующий обслуживающей соте.
принимают информацию сигнализации, включающую в себя шаблон, соответствующий обслуживающей соте.
3. Способ по п.1, дополнительно включающий в себя этап, на котором
принимают информацию сигнализации, включающую в себя шаблон, соответствующий соседней соте.
принимают информацию сигнализации, включающую в себя шаблон, соответствующий соседней соте.
4. Способ по п.1, дополнительно включающий в себя этап, на котором
принимают список соседних сот вместе с взаимосвязью между идентификатором базовой станции соседней соты и шаблоном измерения.
принимают список соседних сот вместе с взаимосвязью между идентификатором базовой станции соседней соты и шаблоном измерения.
5. Способ по п.1, в котором шаблон соответствует предварительно определенному частотно-временному повторному использованию.
6. Способ по п.1, дополнительно включающий в себя этап, на котором
принимают информацию о частотном уровне, соответствующую упомянутому одному идентификатору базовой станции.
принимают информацию о частотном уровне, соответствующую упомянутому одному идентификатору базовой станции.
7. Способ по п.1, дополнительно включающий в себя этап, на котором
принимают минимальную ширину полосы измерения, связанную с передачами опорного сигнала, с целью измерений OTDOA, применимых к упомянутому одному идентификатору базовой станции.
принимают минимальную ширину полосы измерения, связанную с передачами опорного сигнала, с целью измерений OTDOA, применимых к упомянутому одному идентификатору базовой станции.
8. Способ по п.1, дополнительно включающий в себя этап, на котором
принимают информацию о типе развертывания, относящуюся к тому, выровнены ли, выровнены ли частично или являются ли несинхронизированными передачи подкадров OTDOA с упомянутого одного идентификатора базовой станции, причем информация о типе развертывания непосредственно указывает одно из следующего: выровненное, частично выровненное, несинхронизированное или размер поискового окна.
принимают информацию о типе развертывания, относящуюся к тому, выровнены ли, выровнены ли частично или являются ли несинхронизированными передачи подкадров OTDOA с упомянутого одного идентификатора базовой станции, причем информация о типе развертывания непосредственно указывает одно из следующего: выровненное, частично выровненное, несинхронизированное или размер поискового окна.
9. Способ по п.1, дополнительно включающий в себя этап, на котором
принимают системную синхронизацию соседней соты относительно упомянутого одного идентификатора базовой станции, причем системная синхронизация соответствует номеру системного кадра.
принимают системную синхронизацию соседней соты относительно упомянутого одного идентификатора базовой станции, причем системная синхронизация соответствует номеру системного кадра.
10. Способ по п.1, дополнительно включающий в себя этапы, на которых
принимают указание, чтобы использовать характерные для соты опорные символы (CRS) для измерений OTDOA, и
принимают информацию, относящуюся, по меньшей мере, к одному подкадру, в течение которого ожидают, что беспроводной терминал выполнит измерения OTDOA соседних сот.
принимают указание, чтобы использовать характерные для соты опорные символы (CRS) для измерений OTDOA, и
принимают информацию, относящуюся, по меньшей мере, к одному подкадру, в течение которого ожидают, что беспроводной терминал выполнит измерения OTDOA соседних сот.
11. Способ по п.1, дополнительно включающий в себя этап, на котором
принимают разность синхронизации между подкадрами для упомянутого одного идентификатора базовой станции относительно обслуживающей соты.
принимают разность синхронизации между подкадрами для упомянутого одного идентификатора базовой станции относительно обслуживающей соты.
12. Способ по п.1, в котором идентификатор базовой станции является, по меньшей мере, одним из следующего: физического идентификатора соты (PCID) или идентификатора места.
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US18656809P | 2009-06-12 | 2009-06-12 | |
| US61/186,568 | 2009-06-12 | ||
| US12/813,221 US9002354B2 (en) | 2009-06-12 | 2010-06-10 | Interference control, SINR optimization and signaling enhancements to improve the performance of OTDOA measurements |
| US12/813,221 | 2010-06-10 | ||
| PCT/US2010/038257 WO2010144765A1 (en) | 2009-06-12 | 2010-06-11 | Interference control, sinr optimization and signaling enhancements to improve the performance of otdoa measurements |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2014140860A Division RU2670196C2 (ru) | 2009-06-12 | 2014-10-09 | Управление помехами, оптимизация sinr и усовершенствования сигнализации, чтобы улучшить производительность измерений otdoa |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| RU2012100724A RU2012100724A (ru) | 2013-07-20 |
| RU2535191C2 true RU2535191C2 (ru) | 2014-12-10 |
Family
ID=43306855
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2012100724/07A RU2535191C2 (ru) | 2009-06-12 | 2010-06-11 | Управление помехами, оптимизация sinr и усовершенствования сигнализации, чтобы улучшить производительность измерений otdoa |
| RU2014140860A RU2670196C2 (ru) | 2009-06-12 | 2014-10-09 | Управление помехами, оптимизация sinr и усовершенствования сигнализации, чтобы улучшить производительность измерений otdoa |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2014140860A RU2670196C2 (ru) | 2009-06-12 | 2014-10-09 | Управление помехами, оптимизация sinr и усовершенствования сигнализации, чтобы улучшить производительность измерений otdoa |
Country Status (10)
| Country | Link |
|---|---|
| US (2) | US9002354B2 (ru) |
| EP (3) | EP2574122B1 (ru) |
| JP (1) | JP5443598B2 (ru) |
| KR (2) | KR101592796B1 (ru) |
| CN (2) | CN105101407B (ru) |
| BR (1) | BRPI1013125B1 (ru) |
| ES (1) | ES2663199T3 (ru) |
| MX (1) | MX2011013181A (ru) |
| RU (2) | RU2535191C2 (ru) |
| WO (1) | WO2010144765A1 (ru) |
Families Citing this family (188)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10931338B2 (en) | 2001-04-26 | 2021-02-23 | Genghiscomm Holdings, LLC | Coordinated multipoint systems |
| US10355720B2 (en) | 2001-04-26 | 2019-07-16 | Genghiscomm Holdings, LLC | Distributed software-defined radio |
| US10644916B1 (en) | 2002-05-14 | 2020-05-05 | Genghiscomm Holdings, LLC | Spreading and precoding in OFDM |
| US9628231B2 (en) | 2002-05-14 | 2017-04-18 | Genghiscomm Holdings, LLC | Spreading and precoding in OFDM |
| US11184037B1 (en) | 2004-08-02 | 2021-11-23 | Genghiscomm Holdings, LLC | Demodulating and decoding carrier interferometry signals |
| US11552737B1 (en) | 2004-08-02 | 2023-01-10 | Genghiscomm Holdings, LLC | Cooperative MIMO |
| US11381285B1 (en) | 2004-08-02 | 2022-07-05 | Genghiscomm Holdings, LLC | Transmit pre-coding |
| US10834531B2 (en) | 2005-12-15 | 2020-11-10 | Polte Corporation | Multi-path mitigation in rangefinding and tracking objects using reduced attenuation RF technology |
| US10281557B2 (en) | 2005-12-15 | 2019-05-07 | Polte Corporation | Partially synchronized multilateration/trilateration method and system for positional finding using RF |
| US9288623B2 (en) | 2005-12-15 | 2016-03-15 | Invisitrack, Inc. | Multi-path mitigation in rangefinding and tracking objects using reduced attenuation RF technology |
| KR101722810B1 (ko) | 2008-12-03 | 2017-04-05 | 인터디지탈 패튼 홀딩스, 인크 | 캐리어 집적에 대한 업링크 파워 헤드룸 보고 |
| US7940740B2 (en) * | 2009-02-03 | 2011-05-10 | Motorola Mobility, Inc. | Apparatus and method for communicating and processing a positioning reference signal based on identifier associated with a base station |
| KR20100099428A (ko) * | 2009-03-03 | 2010-09-13 | 삼성전자주식회사 | 단말기 간 자동 동작 제어 방법 및 이를 지원하는 단말기 |
| US8730925B2 (en) | 2009-04-09 | 2014-05-20 | Motorola Mobility Llc | Method and apparatus for generating reference signals for accurate time-difference of arrival estimation |
| US9002354B2 (en) * | 2009-06-12 | 2015-04-07 | Google Technology Holdings, LLC | Interference control, SINR optimization and signaling enhancements to improve the performance of OTDOA measurements |
| CN101931996A (zh) * | 2009-06-22 | 2010-12-29 | 宏达国际电子股份有限公司 | 处理定位测量的方法及其相关通讯装置 |
| US9279879B2 (en) * | 2009-06-26 | 2016-03-08 | Qualcomm Incorporated | Positioning in the presence of passive distributed elements |
| US8483707B2 (en) * | 2009-06-26 | 2013-07-09 | Motorola Mobility Llc | Wireless terminal and method for managing the receipt of position reference singals for use in determining a location |
| US8744463B2 (en) * | 2009-06-28 | 2014-06-03 | Lg Electronics Inc. | Method for transmitting a signal for a location-based service in a wireless communication system, and apparatus for same |
| CN101616360B (zh) * | 2009-07-24 | 2012-05-09 | 中兴通讯股份有限公司 | 一种定位参考信号的发送方法及系统 |
| EP2464989A2 (en) | 2009-08-13 | 2012-06-20 | InterDigital Patent Holdings, Inc. | Method and apparatus for supporting positioning measurements |
| US20110124347A1 (en) * | 2009-09-15 | 2011-05-26 | Byron Hua Chen | Method And Apparatus for UE Positioning in LTE Networks |
| CN102656543A (zh) * | 2009-09-22 | 2012-09-05 | 泊布欧斯技术有限公司 | 计算机装置的远程控制 |
| JP5555326B2 (ja) | 2009-10-01 | 2014-07-23 | インターデイジタル パテント ホールディングス インコーポレイテッド | 電力制御の方法および装置 |
| US8374633B2 (en) | 2009-10-05 | 2013-02-12 | Motorola Mobility Llc | Muting indication to enable improved time difference of arrival measurements |
| US8300588B2 (en) * | 2009-10-05 | 2012-10-30 | Futurewei Technologies, Inc. | System and method for user equipment measurement timing in a relay cell |
| KR20110037431A (ko) * | 2009-10-06 | 2011-04-13 | 주식회사 팬택 | 무선통신 시스템에서 신호 전송방법 및 그 송신장치, 이에 대응하는 수신장치 |
| KR20110037430A (ko) * | 2009-10-06 | 2011-04-13 | 주식회사 팬택 | 무선통신 시스템에서 신호 전송방법 및 그 송신장치, 이에 대응하는 수신장치 |
| US8873650B2 (en) | 2009-10-12 | 2014-10-28 | Motorola Mobility Llc | Configurable spatial channel information feedback in wireless communication system |
| US9401784B2 (en) * | 2009-10-21 | 2016-07-26 | Qualcomm Incorporated | Time and frequency acquisition and tracking for OFDMA wireless systems |
| US8600398B2 (en) * | 2009-11-03 | 2013-12-03 | Telefonaktiebolaget Lm Ericsson (Publ) | Method, apparatus and system for defining positioning configuration in a wireless network |
| US9277523B2 (en) * | 2009-11-05 | 2016-03-01 | Qualcomm Incorporated | Method and apparatus for assisted positioning in a wireless communication system |
| US10111111B2 (en) | 2009-11-19 | 2018-10-23 | Qualcomm Incorporated | Per-cell timing and/or frequency acquisition and their use on channel estimation in wireless networks |
| WO2011097760A1 (en) * | 2010-02-12 | 2011-08-18 | Telefonaktiebolaget L M Ericsson (Publ) | Signal measurements for positioning, signalling means for their support and methods of utilizing the measurements to enhance positioning quality in lte |
| CN102823308A (zh) * | 2010-02-12 | 2012-12-12 | 瑞典爱立信有限公司 | 执行无线通信网络中的测量来定位或使能基于位置的服务的方法和器件 |
| KR101819502B1 (ko) | 2010-02-23 | 2018-01-17 | 엘지전자 주식회사 | 간섭 측정 방법 및 단말과, 간섭 정보 수신 방법 및 기지국 |
| US8509102B2 (en) | 2010-02-24 | 2013-08-13 | Motorola Mobility Llc | Threshold determination in TDOA-based positioning system |
| CN102195917B (zh) * | 2010-03-09 | 2014-01-08 | 华为技术有限公司 | 协作通信中站点共用和确定站点小区标识的方法及装置 |
| US20110230144A1 (en) | 2010-03-17 | 2011-09-22 | Iana Siomina | Method and Apparatus for Muting Signaling in a Wireless Communication Network |
| DK2564228T3 (da) | 2010-04-28 | 2014-06-02 | Ericsson Telefon Ab L M | Fremgangsmåde og apparat til opsamling af referencetider tilpositionering af referencesignaler i et trådløst kommunikationsnetværk |
| EP2663144B1 (en) * | 2010-05-03 | 2020-06-10 | Telefonaktiebolaget LM Ericsson (publ) | Methods and apparatus for positioning measurements in multi-antenna transmission systems |
| US9203489B2 (en) | 2010-05-05 | 2015-12-01 | Google Technology Holdings LLC | Method and precoder information feedback in multi-antenna wireless communication systems |
| RU2579940C2 (ru) | 2010-05-10 | 2016-04-10 | Телефонактиеболагет Лм Эрикссон (Пабл) | Способы и устройство для поддержки межчастотных измерений |
| US9119036B2 (en) | 2010-05-10 | 2015-08-25 | Telefonaktiebolaget L M Ericsson (Publ) | Enhanced measurement gap configuration support for positioning |
| KR101191215B1 (ko) | 2010-07-16 | 2012-10-15 | 엘지전자 주식회사 | 무선 통신 시스템에서 위치 결정 방법 및 장치 |
| MX2013001732A (es) * | 2010-08-16 | 2013-03-22 | Ericsson Telefon Ab L M | Nodo de posicionamiento, equipo de usuario y metodos en el mismo. |
| CN102421119A (zh) * | 2010-09-28 | 2012-04-18 | 中兴通讯股份有限公司 | 额外测量结果的上报方法及系统 |
| US20120083221A1 (en) * | 2010-10-01 | 2012-04-05 | Nokia Siemens Networks Oy | Inter-frequency measurements for observed time difference of arrival |
| US8837301B2 (en) | 2010-11-08 | 2014-09-16 | Motorola Mobility Llc | Interference measurements in enhanced inter-cell interference coordination capable wireless terminals |
| US20120122472A1 (en) | 2010-11-12 | 2012-05-17 | Motorola Mobility, Inc. | Positioning Reference Signal Assistance Data Signaling for Enhanced Interference Coordination in a Wireless Communication Network |
| KR20120053941A (ko) | 2010-11-17 | 2012-05-29 | 엘지전자 주식회사 | 무선 통신 시스템에서 위치 결정 방법 및 장치 |
| KR101527041B1 (ko) | 2010-12-14 | 2015-06-09 | 엘지전자 주식회사 | 단말의 위치를 측정하는 방법 |
| WO2012099517A1 (en) * | 2011-01-19 | 2012-07-26 | Telefonaktiebolaget L M Ericsson (Publ) | A user equipment, a positioning node and methods therein |
| US8903415B2 (en) * | 2011-01-19 | 2014-12-02 | Telefonaktiebolaget Lm Ericsson | User equipment, a positioning node and methods therein |
| CN103314613B (zh) * | 2011-01-19 | 2017-09-22 | 瑞典爱立信有限公司 | 针对定位相关应用的增强的测量间隙配置支持 |
| US9084191B2 (en) | 2011-01-20 | 2015-07-14 | Qualcomm Incorporated | Method and apparatus for determining timing information for cells |
| WO2012103946A1 (en) * | 2011-02-02 | 2012-08-09 | Fujitsu Limited | Wireless communication with co-operating cells |
| US9426703B2 (en) | 2011-02-11 | 2016-08-23 | Qualcomm Incorporated | Cooperation and operation of macro node and remote radio head deployments in heterogeneous networks |
| US8995400B2 (en) | 2011-02-11 | 2015-03-31 | Qualcomm Incorporated | Method and apparatus for enabling channel and interference estimations in macro/RRH system |
| US9544108B2 (en) | 2011-02-11 | 2017-01-10 | Qualcomm Incorporated | Method and apparatus for enabling channel and interference estimations in macro/RRH system |
| US9054842B2 (en) | 2011-02-14 | 2015-06-09 | Qualcomm Incorporated | CRS (common reference signal) and CSI-RS (channel state information reference signal) transmission for remote radio heads (RRHs) |
| EP2676483B1 (en) | 2011-02-15 | 2018-03-07 | Telefonaktiebolaget LM Ericsson (publ) | Bandwidth-based configuration of measurement gaps |
| US20120213108A1 (en) | 2011-02-22 | 2012-08-23 | Qualcomm Incorporated | Radio resource monitoring (rrm) and radio link monitoring (rlm) procedures for remote radio head (rrh) deployments |
| US9258718B2 (en) | 2011-02-22 | 2016-02-09 | Qualcomm Incorporated | Positioning location for remote radio heads (RRH) with same physical cell identity (PCI) |
| US9369885B2 (en) * | 2011-04-12 | 2016-06-14 | Qualcomm Incorporated | Method and apparatus for selecting reference signal tones for decoding a channel |
| CN102821397B (zh) * | 2011-06-08 | 2016-03-30 | 华为技术有限公司 | 定位测量载波选择及定位测量方法、定位处理装置及终端 |
| US8611444B2 (en) * | 2011-06-22 | 2013-12-17 | Infomax Communication Co., Ltd. | Receiver and signal receiving method thereof |
| WO2013005948A2 (ko) * | 2011-07-04 | 2013-01-10 | 엘지전자 주식회사 | 무선 통신 시스템에서 단말이 상향링크 타이밍을 제어하는 방법 및 이를 위한 장치 |
| US8774847B2 (en) * | 2011-07-27 | 2014-07-08 | Broadcom Corporation | Cellular radio path measurement and reporting |
| US11835639B2 (en) | 2011-08-03 | 2023-12-05 | Qualcomm Technologies, Inc. | Partially synchronized multilateration or trilateration method and system for positional finding using RF |
| US11125850B2 (en) | 2011-08-03 | 2021-09-21 | Polte Corporation | Systems and methods for determining a timing offset of emitter antennas in a wireless network |
| EP3447984B1 (en) * | 2011-08-12 | 2023-03-22 | InterDigital Patent Holdings, Inc. | Reference signal configuration for extension carriers and carrier segments |
| JP2013055393A (ja) | 2011-09-01 | 2013-03-21 | Sony Corp | 通信装置、通信方法、通信システムおよび基地局 |
| US9294875B2 (en) * | 2011-09-30 | 2016-03-22 | Electronics And Telecommunications Research Institute | Method for determining position of terminal in cellular mobile communication system |
| EP2761780A1 (en) | 2011-09-30 | 2014-08-06 | Interdigital Patent Holdings, Inc. | Multipoint transmission in wireless communication |
| US9509417B2 (en) * | 2011-10-13 | 2016-11-29 | Lg Electronics Inc. | Method in which a terminal transceives a signal in a wireless communication system and apparatus for same |
| CN103209475B (zh) | 2012-01-16 | 2016-05-25 | 华为技术有限公司 | 定位方法、定位服务器、终端和基站 |
| WO2013129866A1 (ko) * | 2012-02-29 | 2013-09-06 | 엘지전자 주식회사 | 캐리어 타입을 고려한 통신 방법 및 이를 위한 장치 |
| US9247517B2 (en) * | 2012-03-26 | 2016-01-26 | Telefonaktiebolaget L M Ericsson (Publ) | Positioning with split antennas per cell |
| WO2013153513A2 (en) * | 2012-04-09 | 2013-10-17 | Telefonaktiebolaget L M Ericsson (Publ) | Methods and apparatus for enhancing network positioning measurement performance by managing uncertain measurement occasions |
| CN109327853A (zh) | 2012-07-13 | 2019-02-12 | 中兴通讯股份有限公司 | 一种系统信息的接收方法和装置 |
| US20140022988A1 (en) * | 2012-07-20 | 2014-01-23 | Alexei Davydov | User equipment and method for antenna port quasi co-location signaling in coordinated multi-point operations |
| CN103703841B (zh) * | 2012-07-30 | 2018-03-09 | 华为技术有限公司 | 用户设备的定位方法、数据发送方法、装置及用户设备 |
| US10863313B2 (en) | 2014-08-01 | 2020-12-08 | Polte Corporation | Network architecture and methods for location services |
| US10440512B2 (en) | 2012-08-03 | 2019-10-08 | Polte Corporation | Angle of arrival (AOA) positioning method and system for positional finding and tracking objects using reduced attenuation RF technology |
| US10845453B2 (en) | 2012-08-03 | 2020-11-24 | Polte Corporation | Network architecture and methods for location services |
| US10075858B2 (en) * | 2012-09-20 | 2018-09-11 | Telefonaktiebolaget L M Ericsson (Publ) | Weighted RSRP measurement |
| US20140087763A1 (en) * | 2012-09-24 | 2014-03-27 | Qualcomm Incorporated | Non-geotagged access point positioning |
| US8923880B2 (en) | 2012-09-28 | 2014-12-30 | Intel Corporation | Selective joinder of user equipment with wireless cell |
| EP2907351A4 (en) * | 2012-10-10 | 2016-06-15 | Ericsson Telefon Ab L M | METHOD AND NODE FOR POSITIONING IN A COMBINED CELL |
| US9797987B2 (en) * | 2012-10-15 | 2017-10-24 | Zeta Associates, Inc. | Correcting frequency errors in frequency difference of arrival geolocation systems |
| US9813262B2 (en) | 2012-12-03 | 2017-11-07 | Google Technology Holdings LLC | Method and apparatus for selectively transmitting data using spatial diversity |
| JP2016508217A (ja) * | 2012-12-12 | 2016-03-17 | インヴィジトラック,インク. | 低減衰rf技術を使用する対象の追跡および測距におけるマルチパス緩和 |
| KR101988506B1 (ko) * | 2012-12-14 | 2019-09-30 | 삼성전자 주식회사 | 무선 이동통신 시스템에서 디스커버리 신호를 송/수신하는 방법 및 장치 |
| WO2014098444A1 (ko) * | 2012-12-17 | 2014-06-26 | 엘지전자 주식회사 | 하향링크 신호 수신 방법 및 사용자기기와 하향링크 신호 전송 방법 및 기지국 |
| US9591508B2 (en) | 2012-12-20 | 2017-03-07 | Google Technology Holdings LLC | Methods and apparatus for transmitting data between different peer-to-peer communication groups |
| US9651653B2 (en) | 2012-12-24 | 2017-05-16 | Qualcomm Incorporated | Positioning reference signal (PRS) generation for multiple transmit antenna systems |
| US10039073B2 (en) | 2013-01-03 | 2018-07-31 | Qualcomm Incorporated | Method for determining location of wireless devices |
| US9979531B2 (en) | 2013-01-03 | 2018-05-22 | Google Technology Holdings LLC | Method and apparatus for tuning a communication device for multi band operation |
| KR101539054B1 (ko) * | 2013-01-04 | 2015-07-22 | 주식회사 케이티 | 무선 신호 처리 장치와 위치 측정 장치, 및 그의 위치 측정 방법 |
| US11277242B2 (en) * | 2013-01-18 | 2022-03-15 | Nokia Solutions And Networks Oy | Reference signal transmission from multiple cells in dormant mode |
| US10229697B2 (en) | 2013-03-12 | 2019-03-12 | Google Technology Holdings LLC | Apparatus and method for beamforming to obtain voice and noise signals |
| CN105191445B (zh) | 2013-04-03 | 2018-11-27 | 交互数字专利控股公司 | 一种干扰测量方法、装置及基站 |
| CN105308888B (zh) * | 2013-06-17 | 2018-03-23 | Lg 电子株式会社 | 用于发送参考信号的方法 |
| US9432809B2 (en) | 2013-07-12 | 2016-08-30 | Qualcomm Incorporated | Providing OTDOA PRS assistance data |
| US9479950B2 (en) * | 2013-08-16 | 2016-10-25 | Telefonaktiebolaget Lm Ericsson (Publ) | Method and apparatus for inter-frequency measurements in a communication network |
| US9516541B2 (en) * | 2013-09-17 | 2016-12-06 | Intel IP Corporation | Congestion measurement and reporting for real-time delay-sensitive applications |
| US9386542B2 (en) | 2013-09-19 | 2016-07-05 | Google Technology Holdings, LLC | Method and apparatus for estimating transmit power of a wireless device |
| US9356808B2 (en) * | 2013-09-25 | 2016-05-31 | Apple Inc. | System and method for adaptive channel estimation based on data activity |
| EP2860903B1 (en) * | 2013-10-11 | 2017-07-19 | Telefonaktiebolaget LM Ericsson (publ) | A network node and a method therein; a positioning node and a method therein; a user equipment and a method therein, for handling transmission of a reference signal |
| US9549290B2 (en) | 2013-12-19 | 2017-01-17 | Google Technology Holdings LLC | Method and apparatus for determining direction information for a wireless device |
| KR101821071B1 (ko) * | 2014-01-15 | 2018-01-22 | 엘지전자 주식회사 | 무선 통신 시스템에서 탐색 신호를 기초로 한 셀 탐색 과정의 수행 방법 및 탐색 과정을 수행하는 사용자 장치 |
| KR101972937B1 (ko) * | 2014-03-20 | 2019-04-26 | 후아웨이 테크놀러지 컴퍼니 리미티드 | 기지국, 사용자 장비, 및 기지국 간 반송파 집성을 위한 측정 방법 |
| US9491007B2 (en) | 2014-04-28 | 2016-11-08 | Google Technology Holdings LLC | Apparatus and method for antenna matching |
| US9478847B2 (en) | 2014-06-02 | 2016-10-25 | Google Technology Holdings LLC | Antenna system and method of assembly for a wearable electronic device |
| US10182413B2 (en) * | 2014-07-30 | 2019-01-15 | Qualcomm Incorporated | Wireless positioning using scheduled transmissions |
| US10212718B2 (en) | 2014-10-28 | 2019-02-19 | Sony Corporation | Communication apparatus and communication method |
| US20170339660A1 (en) * | 2014-11-10 | 2017-11-23 | Telefonaktiebolaget Lm Ericsson (Publ) | Signaling and Using CRS Muting in Shared Cell for Positioning |
| US10261165B2 (en) | 2014-12-31 | 2019-04-16 | Qualcomm Incorporated | Determining network synchronization status |
| KR102517847B1 (ko) * | 2015-01-26 | 2023-04-04 | 애플 인크. | 이종 기준 신호를 사용한 otdoa(관측된 도달 시간차) 포지셔닝 향상 |
| WO2016122860A1 (en) * | 2015-01-29 | 2016-08-04 | Zte Corporation | Method and apparatus for obtaining arrival time difference in mobile positioning |
| CN107431989B (zh) * | 2015-04-03 | 2021-02-09 | 株式会社Ntt都科摩 | 用户装置以及基站 |
| US10772055B2 (en) * | 2015-04-08 | 2020-09-08 | Alcatel Lucent | Base station synchronization |
| KR102080118B1 (ko) * | 2015-04-10 | 2020-02-24 | 텔레호낙티에볼라게트 엘엠 에릭슨(피유비엘) | 위치결정을 위한 강화된 위치결정 참조 신호 패턴들 |
| US9482742B1 (en) | 2015-05-12 | 2016-11-01 | Qualcomm Incorporated | Positioning reference signal (PRS) generation for multiple transmit antenna systems |
| US11039330B2 (en) * | 2015-08-12 | 2021-06-15 | Apple Inc. | Method of measurement gap enhancement |
| EP3335483B1 (en) | 2015-08-14 | 2020-04-29 | Telefonaktiebolaget LM Ericsson (PUBL) | Methods and apparatuses for positioning based on signal correlation function characteristics feedback |
| EP3342203B1 (en) | 2015-08-27 | 2021-01-20 | Apple Inc. | An apparatus and method for reporting system frame number (sfn) and subframe offset in dual connectivity (dc) enhancement |
| US10334546B2 (en) * | 2015-08-31 | 2019-06-25 | Qualcomm Incorporated | Synchronization signaling coordination for co-existence on a shared communication medium |
| KR102470553B1 (ko) * | 2015-10-05 | 2022-11-24 | 한양대학교 산학협력단 | 무선 통신 시스템에서의 위치 참조 신호 송수신 방법 및 그 장치 |
| KR102341280B1 (ko) * | 2015-10-08 | 2021-12-21 | 삼성전자주식회사 | 통신 디바이스 및 그 제어 방법 |
| WO2017156734A1 (en) * | 2016-03-16 | 2017-09-21 | Lenovo Innovations Limited (Hong Kong) | Reference signal sequence determination in a wireless communication system |
| JPWO2017195488A1 (ja) * | 2016-05-12 | 2019-03-14 | 株式会社Nttドコモ | ユーザ装置及び測定方法 |
| EP3456114B1 (en) | 2016-05-13 | 2023-03-22 | Telefonaktiebolaget LM Ericsson (PUBL) | Methods, user equipment, radio transmitter and network node for managing positioning reference signals |
| KR102593931B1 (ko) * | 2016-06-13 | 2023-10-25 | 주식회사 엘지유플러스 | 무선 통신 시스템에서 측정 셀 선택 방법 |
| CN107689855B (zh) * | 2016-08-05 | 2022-07-29 | 大唐移动通信设备有限公司 | 信号发送、接收方法和设备 |
| WO2018028788A1 (en) * | 2016-08-11 | 2018-02-15 | Sony Mobile Communications Inc. | Positioning of mobile devices |
| EP3497989B1 (en) * | 2016-08-11 | 2020-09-23 | Sony Mobile Communications Inc. | Tdoa positioning of mobile devices |
| US10256957B2 (en) * | 2016-08-12 | 2019-04-09 | Innovative Technology Lab Co., Ltd. | Method and apparatus for transmitting/receiving positioning reference signal |
| CN109644423B (zh) * | 2016-08-12 | 2021-11-05 | 索尼公司 | 位置服务器、基础设施设备、通信装置和用于使用补充定位参考信号的方法 |
| EP3282275B1 (en) * | 2016-08-12 | 2019-05-29 | Nokia Technologies Oy | Position detection of user equipment within a wireless telecommunications network |
| EP3497829B1 (en) * | 2016-08-12 | 2022-02-09 | Nokia Solutions and Networks Oy | Link latency and system behavior |
| ES2770678T3 (es) * | 2016-08-12 | 2020-07-02 | Nokia Technologies Oy | Detección de posición de equipos de usuario dentro de una red de telecomunicaciones inalámbrica |
| US10660109B2 (en) * | 2016-11-16 | 2020-05-19 | Qualcomm Incorporated | Systems and methods to support multiple configurations for positioning reference signals in a wireless network |
| US11239972B2 (en) * | 2016-11-17 | 2022-02-01 | Qualcomm Incorporated | Large cell support for narrowband random access |
| KR102557530B1 (ko) * | 2016-12-08 | 2023-07-20 | 한국전자통신연구원 | 서버 및 서버에 의해 수행되는 무선 통신 네트워크의 제어 방법 |
| US10863453B2 (en) * | 2017-02-14 | 2020-12-08 | Telefonaktiebolaget Lm Ericsson (Publ) | PRS power pattern |
| DE112018000219T5 (de) * | 2017-04-03 | 2019-09-05 | Intel IP Corporation | UE-Fähigkeitsangabe zum Positionierungsserver |
| US10285156B2 (en) | 2017-04-09 | 2019-05-07 | Qualcomm Incorporated | Dynamic measurement gap configuration for inter-frequency positioning measurements |
| US10243773B1 (en) | 2017-06-30 | 2019-03-26 | Genghiscomm Holdings, LLC | Efficient peak-to-average-power reduction for OFDM and MIMO-OFDM |
| US10637705B1 (en) | 2017-05-25 | 2020-04-28 | Genghiscomm Holdings, LLC | Peak-to-average-power reduction for OFDM multiple access |
| US10736074B2 (en) * | 2017-07-31 | 2020-08-04 | Qualcomm Incorporated | Systems and methods to facilitate location determination by beamforming of a positioning reference signal |
| US11320511B2 (en) | 2017-09-29 | 2022-05-03 | Futurewei Technologies, Inc. | Observed time difference of arrival (OTDOA) positioning in wireless communication networks |
| CN107548130B (zh) * | 2017-10-18 | 2020-01-03 | 京信通信系统(中国)有限公司 | 一种基站锁定的方法、装置和客户终端设备 |
| WO2019097660A1 (ja) * | 2017-11-16 | 2019-05-23 | 株式会社Nttドコモ | ユーザ装置 |
| US10098088B1 (en) | 2017-12-13 | 2018-10-09 | Qualcomm Incorporated | System and method for selecting a transceiver for performing a positioning reference signal measurement |
| US10952081B2 (en) * | 2018-02-23 | 2021-03-16 | Google Llc | Detecting radio coverage problems |
| US11255945B2 (en) | 2018-03-27 | 2022-02-22 | Polte Corporation | Multi-path mitigation in tracking objects using compressed RF data |
| US10757713B2 (en) * | 2018-04-10 | 2020-08-25 | Qualcomm Incorporated | Orthogonality and encapsulation for positioning and navigation signals |
| US10644922B2 (en) * | 2018-04-16 | 2020-05-05 | Qualcomm Incorporated | Protected use of navigation and positioning signal |
| US10588136B2 (en) * | 2018-05-25 | 2020-03-10 | Qualcomm Incorporated | Restrict the positioning reference signal bandwidth in NB-IoT to save power |
| US11317414B2 (en) * | 2018-06-05 | 2022-04-26 | Qualcomm Incorporated | Exchanging location information of a base station that is associated with a plurality of different transmission point locations |
| US10327109B1 (en) * | 2018-08-29 | 2019-06-18 | Qualcomm Incorporated | Methods and systems for location determination of a mobile device using partial RF bands |
| US20210352738A1 (en) * | 2018-10-15 | 2021-11-11 | Ipcom Gmbh & Co. Kg | Random access in a satellite communication system |
| EP3895466A1 (en) * | 2018-12-13 | 2021-10-20 | Telefonaktiebolaget LM Ericsson (publ) | Autonomous parameter setting |
| WO2020140225A1 (en) * | 2019-01-03 | 2020-07-09 | Qualcomm Incorporated | Reference signaling for neighbor interference management |
| US20200221405A1 (en) * | 2019-01-04 | 2020-07-09 | Huawei Technologies Co., Ltd. | Sounding reference signal for uplink-based multi-cell measurement |
| EP3751920B1 (en) * | 2019-01-11 | 2024-03-27 | LG Electronics Inc. | Method for obtaining positioning information in wireless communication system and apparatus therefor |
| US11329780B2 (en) * | 2019-01-16 | 2022-05-10 | Qualcomm Incorporated | Physical layer non-line-of-sight (LOS) path discrimination using multiple frequency carriers |
| BR112021012474A2 (pt) * | 2019-01-18 | 2021-09-08 | Google Llc | Conjunto de coordenação ativa para ambientes de espectros compartilhados |
| CN113454964A (zh) | 2019-01-25 | 2021-09-28 | 珍吉斯科姆控股有限责任公司 | 正交多址和非正交多址 |
| US11343823B2 (en) | 2020-08-16 | 2022-05-24 | Tybalt, Llc | Orthogonal multiple access and non-orthogonal multiple access |
| US11317245B2 (en) * | 2019-03-11 | 2022-04-26 | Qualcomm Incorporated | Time-domain waveform reporting for positioning |
| WO2020242898A1 (en) | 2019-05-26 | 2020-12-03 | Genghiscomm Holdings, LLC | Non-orthogonal multiple access |
| KR102102225B1 (ko) * | 2019-06-05 | 2020-04-20 | 삼성전자 주식회사 | 무선 이동통신 시스템에서 디스커버리 신호를 송/수신하는 방법 및 장치 |
| CN110376551B (zh) * | 2019-07-04 | 2021-05-04 | 浙江大学 | 一种基于声信号时频联合分布的tdoa定位方法 |
| US11558162B2 (en) | 2019-08-12 | 2023-01-17 | Qualcomm Incorporated | Interaction of discontinuous reception (DRX) with positioning reference signal (PRS) resources |
| US11523364B2 (en) * | 2019-08-13 | 2022-12-06 | Qualcomm Incorporated | Computation complexity framework for positioning reference signal processing |
| JP2022545294A (ja) * | 2019-08-29 | 2022-10-26 | エルジー エレクトロニクス インコーポレイティド | 無線通信システムにおいて端末の位置を測定する方法及び装置 |
| GB2588101B (en) * | 2019-10-04 | 2022-09-28 | Samsung Electronics Co Ltd | Frequency layer configuration for positioning reference signals |
| US11570789B2 (en) * | 2019-11-06 | 2023-01-31 | Qualcomm Incorporated | Multi-user-equipment positioning signaling |
| JP7461487B2 (ja) * | 2020-02-07 | 2024-04-03 | クアルコム,インコーポレイテッド | 非地上ネットワーク用の測位基準信号のための相補的タイミング情報 |
| US20230048592A1 (en) * | 2020-02-10 | 2023-02-16 | Nokia Solutions And Networks Oy | Apparatus, Method, and Computer Program |
| CN114007213B (zh) * | 2020-07-28 | 2023-01-24 | 维沃移动通信有限公司 | 干扰协调处理方法及相关设备 |
| CN114513740B (zh) * | 2020-10-27 | 2024-01-12 | 大唐移动通信设备有限公司 | 一种定位方法、装置、终端及设备 |
| US11317370B1 (en) * | 2021-02-26 | 2022-04-26 | Qualcomm Incorporated | Interference avoidance for ranging and positioning of distributed devices |
| US11515980B1 (en) | 2021-12-14 | 2022-11-29 | BlueWave Technology (Shanghai) Co., Ltd | Positioning method, mobile terminal and positioning system |
| CN113923777B (zh) * | 2021-12-14 | 2022-04-01 | 佰路威科技(北京)有限公司 | 定位方法、定位用移动终端及定位系统 |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2007116114A (ru) * | 2004-09-29 | 2008-11-20 | Квэлкомм Инкорпорейтед (US) | Способ, предназначенный для нахождения местоположения подвижного терминала в сотовой радиосистеме |
Family Cites Families (138)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4631543A (en) | 1983-09-28 | 1986-12-23 | Sanders Associates, Inc. | Method and apparatus for reducing the effects of impulse noise in Loran-C receivers |
| US6236365B1 (en) | 1996-09-09 | 2001-05-22 | Tracbeam, Llc | Location of a mobile station using a plurality of commercial wireless infrastructures |
| US20080002735A1 (en) | 1997-04-01 | 2008-01-03 | Paradox Security Systems Ltd. | Device network |
| US6226317B1 (en) | 1998-03-30 | 2001-05-01 | Motorola, Inc. | Method and system for aiding in the location of a subscriber unit in a spread spectrum communication system |
| US6741863B1 (en) * | 1998-12-18 | 2004-05-25 | Lucent Technologies Inc. | Method and apparatus for locating a wireless mobile unit |
| US6567486B1 (en) * | 1999-07-26 | 2003-05-20 | Lucent Technologies Inc. | Apparatus and method for finding location of a mobile unit |
| FR2808160B1 (fr) | 2000-04-21 | 2004-05-28 | Mitsubishi Electric Inf Tech | Procede de determination de la position d'une station mobile d'un reseau de telecommunication mobile |
| US7444173B2 (en) | 2000-12-29 | 2008-10-28 | Vertu Ltd. | Mobile telephone |
| US6775242B2 (en) * | 2001-07-09 | 2004-08-10 | Qualcomm Incorporated | Method and apparatus for time-aligning transmissions from multiple base stations in a CDMA communication system |
| CN1177453C (zh) | 2001-07-19 | 2004-11-24 | 朱占新 | 可旋显示屏移动电话 |
| US6950663B2 (en) * | 2001-08-24 | 2005-09-27 | Nokia Mobile Phones Ltd. | Method of locating a mobile station based on observed time difference |
| US6731913B2 (en) | 2002-01-30 | 2004-05-04 | Nokia Corporation | Elastomeric enclosure |
| US8280412B2 (en) * | 2002-07-31 | 2012-10-02 | Interdigital Technology Corporation | Method for enhanced mobile assisted positioning |
| US8194770B2 (en) | 2002-08-27 | 2012-06-05 | Qualcomm Incorporated | Coded MIMO systems with selective channel inversion applied per eigenmode |
| US7113792B2 (en) | 2002-10-01 | 2006-09-26 | Qualcomm Incorporated | Mobile station location |
| JP4474831B2 (ja) | 2003-01-28 | 2010-06-09 | 日本電気株式会社 | 移動通信網における移動局位置特定システム、制御装置及び移動局 |
| US7822140B2 (en) | 2003-03-17 | 2010-10-26 | Broadcom Corporation | Multi-antenna communication systems utilizing RF-based and baseband signal weighting and combining |
| US20040263386A1 (en) | 2003-06-26 | 2004-12-30 | King Thomas M. | Satellite positioning system receivers and methods |
| US7155244B2 (en) * | 2003-08-14 | 2006-12-26 | Siemens Communications, Inc. | Precise common timing in a wireless network |
| EA009927B1 (ru) | 2003-09-17 | 2008-04-28 | АйСиТи СИСТЕМЗ ПТИ ЛТД. | Система определения местоположения с использованием регулируемой передачи мощности в микросотовой сети |
| KR100560386B1 (ko) | 2003-12-17 | 2006-03-13 | 한국전자통신연구원 | 무선 통신 시스템의 상향 링크에서 코히어런트 검출을위한 직교주파수 분할 다중 접속 방식의 송수신 장치 및그 방법 |
| US7242947B2 (en) | 2003-12-23 | 2007-07-10 | Motorola, Inc. | Method and apparatus for determining the location of a unit using neighbor lists |
| BRPI0508123B1 (pt) | 2004-03-04 | 2020-12-08 | Guangdong Oppo Mobile Telecommunications Corp., Ltd | método para a comutação de modo de um terminal de comunicação móvel multibanda multimodo em um estado ocioso |
| US7599420B2 (en) | 2004-07-30 | 2009-10-06 | Rearden, Llc | System and method for distributed input distributed output wireless communications |
| KR100834626B1 (ko) | 2004-05-06 | 2008-06-02 | 삼성전자주식회사 | 자기 거치 기능을 구비한 슬라이딩/스윙 타입 휴대 장치 |
| US7961609B2 (en) | 2004-07-20 | 2011-06-14 | Qualcomm Incorporated | Packet aware scheduler in wireless communication systems |
| CN1787679B (zh) * | 2004-12-09 | 2010-07-28 | 北京三星通信技术研究有限公司 | 无线网络控制器确定待定位用户设备的定位方法 |
| US8446892B2 (en) | 2005-03-16 | 2013-05-21 | Qualcomm Incorporated | Channel structures for a quasi-orthogonal multiple-access communication system |
| US7920544B2 (en) | 2005-03-28 | 2011-04-05 | Qualcomm Incorporated | Method and apparatus for enhancing signal-to-noise ratio of position location measurements |
| US7257412B2 (en) * | 2005-04-25 | 2007-08-14 | Mediatek Inc. | Methods and systems for location estimation |
| CN100433908C (zh) * | 2005-04-30 | 2008-11-12 | 华为技术有限公司 | 一种到达时间差定位方法 |
| WO2006121302A1 (en) | 2005-05-13 | 2006-11-16 | Samsung Electronics Co., Ltd. | Method and apparatus for indexing physical channels in an ofdma system |
| EP1727324A1 (de) | 2005-05-25 | 2006-11-29 | Siemens Aktiengesellschaft | Funk-Übertragung mit variabler Länge des Guard Intervals |
| US8744465B2 (en) | 2005-06-16 | 2014-06-03 | Qualcomm Incorporated | Resource allocation method in a communication system |
| US7817967B2 (en) | 2005-06-21 | 2010-10-19 | Atc Technologies, Llc | Communications systems including adaptive antenna systems and methods for inter-system and intra-system interference reduction |
| US20070008108A1 (en) | 2005-07-07 | 2007-01-11 | Schurig Alma K | Unsynchronized beacon location system and method |
| JP4594822B2 (ja) | 2005-08-09 | 2010-12-08 | 株式会社エヌ・ティ・ティ・ドコモ | 受信装置、移動通信システムにおける通信制御方法 |
| US8315633B2 (en) | 2005-08-26 | 2012-11-20 | Qualcomm Incorporated | Uplink soft handoff support in UMTS TDD systems for efficient uplink power and rate control |
| KR100784542B1 (ko) | 2005-10-20 | 2007-12-11 | 엘지전자 주식회사 | 면접촉 축회전 이동통신단말기 |
| US7894417B2 (en) | 2005-11-01 | 2011-02-22 | Nokia Corporation | Signal arrangement for multi-bandwidth OFDM system |
| CN100401810C (zh) | 2005-11-12 | 2008-07-09 | 华为技术有限公司 | 一种移动通信基站及系统 |
| US7711029B2 (en) | 2005-12-02 | 2010-05-04 | Telefonaktiebolaget Lm Ericsson (Publ) | Hopping pilot pattern for telecommunications |
| WO2007080727A1 (ja) | 2005-12-09 | 2007-07-19 | Mitsubishi Electric Corporation | 通信方法および通信装置 |
| US7706328B2 (en) | 2006-01-04 | 2010-04-27 | Qualcomm Incorporated | Methods and apparatus for position location in a wireless network |
| US20070211657A1 (en) | 2006-03-09 | 2007-09-13 | Motorola, Inc. | Apparatus and Method for Assigning Time Domain Resources to a Receiver |
| US20070211813A1 (en) | 2006-03-10 | 2007-09-13 | Shilpa Talwar | MIMO precoding in the presence of co-channel interference |
| US8059609B2 (en) | 2006-03-20 | 2011-11-15 | Qualcomm Incorporated | Resource allocation to support single-user and multi-user MIMO transmission |
| EP2005687B1 (en) * | 2006-03-24 | 2017-06-28 | LG Electronics Inc. | A method and structure of configuring preamble to support transmission of data symbol in a wireless communication system |
| KR100751943B1 (ko) | 2006-03-28 | 2007-08-24 | 엘지전자 주식회사 | 외장 케이스 및 이를 갖는 휴대 단말기 |
| CN100486356C (zh) | 2006-05-08 | 2009-05-06 | 华为技术有限公司 | 一种移动台定位处理方法 |
| EP1855424B1 (en) | 2006-05-12 | 2013-07-10 | Panasonic Corporation | Reservation of radio resources for users in a mobile communications system |
| KR20070113967A (ko) | 2006-05-26 | 2007-11-29 | 엘지전자 주식회사 | 위상천이 기반의 프리코딩 방법 및 이를 지원하는 송수신기 |
| US20080133462A1 (en) | 2006-06-23 | 2008-06-05 | Aylward James A | System for remote data geocoding |
| US20080001915A1 (en) | 2006-06-30 | 2008-01-03 | Nokia Corporation | Input device of mobile devices |
| US7570962B2 (en) | 2006-07-12 | 2009-08-04 | Intel Corporation | Wireless access network base station and method for determining location information for a mobile station using uplink time-difference of arrival |
| US8174995B2 (en) | 2006-08-21 | 2012-05-08 | Qualcom, Incorporated | Method and apparatus for flexible pilot pattern |
| US8787344B2 (en) | 2006-08-30 | 2014-07-22 | Qualcomm Incorporated | Method and apparatus for ACKCH with repetition in orthogonal systems |
| US8295311B2 (en) | 2006-09-11 | 2012-10-23 | Telefonaktiebolaget Lm Ericsson (Publ) | Detection of time-frequency hopping patterns |
| US8626104B2 (en) | 2006-09-28 | 2014-01-07 | Apple Inc. | Generalized codebook design method for limited feedback systems |
| WO2008042348A1 (en) | 2006-10-02 | 2008-04-10 | Travel Tags, Inc. | Layered image display sheet |
| TW200818956A (en) * | 2006-10-06 | 2008-04-16 | Interdigital Tech Corp | Autonomous timing advance adjustment during handover |
| KR101355313B1 (ko) | 2006-10-12 | 2014-01-23 | 엘지전자 주식회사 | Mimo 시스템에서의 참조신호 배치 방법 |
| EP2434671A3 (en) | 2006-11-07 | 2013-03-13 | Qualcomm Incorporated | Method and apparatus for reinforcement of MBSFN transmissions |
| FI20065755A0 (fi) | 2006-11-28 | 2006-11-28 | Nokia Corp | Kanavan estimointi |
| US7797000B2 (en) | 2006-12-01 | 2010-09-14 | Trueposition, Inc. | System for automatically determining cell transmitter parameters to facilitate the location of wireless devices |
| US9635680B2 (en) | 2006-12-28 | 2017-04-25 | Google Technology Holdings LLC | Method and apparatus for multiplexing signals having different protocols |
| US8681749B2 (en) | 2007-01-04 | 2014-03-25 | Qualcomm Incorporated | Control resource mapping for a wireless communication system |
| US7746952B2 (en) | 2007-01-08 | 2010-06-29 | Samsung Electronics, Co., Ltd. | Apparatus for generating precoding codebook for MIMO system and method using the apparatus |
| US8300674B2 (en) | 2007-01-12 | 2012-10-30 | Telefonaktiebolaget L M Ericsson (Publ) | Method and apparatus for complexity reduction in detection of delay and Doppler shifted signature sequences |
| US8644415B2 (en) | 2007-01-12 | 2014-02-04 | Telefonaktiebolaget Lm Ericsson (Publ) | Method for precoding using a block diagonal matrix |
| US8295325B2 (en) | 2007-01-12 | 2012-10-23 | Telefonaktiebolaget L M Ericsson (Publ) | Signature sequences and methods for time-frequency selective channel |
| US8345620B2 (en) | 2007-02-08 | 2013-01-01 | Qualcomm Incorporated | Method and apparatus for frequency hopping with frequency fraction reuse |
| US8077596B2 (en) | 2007-03-12 | 2011-12-13 | Qualcomm Incorporated | Signaling transmission and reception in wireless communication systems |
| CN101682909B (zh) | 2007-03-20 | 2011-07-27 | 华为技术有限公司 | 多用户多输入多输出无线系统中的信道质量估计 |
| US7796639B2 (en) | 2007-03-21 | 2010-09-14 | Motorola Mobility, Inc. | Apparatuses and methods for multi-antenna channel quality data acquisition in a broadcast/multicast service network |
| CN101035379B (zh) | 2007-04-09 | 2011-11-30 | 中兴通讯股份有限公司 | 用户面观测到达时间差定位方法 |
| EP2135473B1 (en) | 2007-04-11 | 2020-12-23 | Optis Wireless Technology, LLC | Information on reference signal structure for neighbouring cell measurements |
| US8254492B2 (en) | 2007-04-26 | 2012-08-28 | Samsung Electronics Co., Ltd. | Transmit diversity in a wireless communication system |
| BRPI0809814A2 (pt) | 2007-04-30 | 2014-10-07 | Interdigital Tech Corp | Célula de resseleção e intercomunicação com serviço multimídia de radiodifusão/multicast |
| EP2145205B1 (en) | 2007-05-01 | 2019-09-18 | QUALCOMM Incorporated | Position location for wireless communication systems |
| US7649831B2 (en) | 2007-05-30 | 2010-01-19 | Samsung Electronics Co., Ltd. | Multi-user MIMO feedback and transmission in a wireless communication system |
| US8908632B2 (en) | 2007-06-08 | 2014-12-09 | Samsung Electronics Co., Ltd. | Methods and apparatus for channel interleaving in OFDM systems |
| KR20080114452A (ko) | 2007-06-26 | 2008-12-31 | 엘지전자 주식회사 | 다중 안테나 시스템에서 데이터 전송방법 및 코드북구성방법 |
| US8369450B2 (en) | 2007-08-07 | 2013-02-05 | Samsung Electronics Co., Ltd. | Pilot boosting and traffic to pilot ratio estimation in a wireless communication system |
| KR20090015778A (ko) | 2007-08-08 | 2009-02-12 | 엘지전자 주식회사 | 스케줄링 요청 신호 전송 방법 |
| CN101785339A (zh) | 2007-08-16 | 2010-07-21 | 日本电气株式会社 | 无线通信系统以及方法 |
| GB0716966D0 (en) | 2007-08-31 | 2007-10-10 | Fujitsu Ltd | Wireless communication systems |
| US8325671B2 (en) | 2007-09-06 | 2012-12-04 | Qualcomm Incorporated | Methods and apparatus for improved utilization of air link resources in a wireless communications system including a multi-antenna element base station |
| US7885211B2 (en) | 2007-10-26 | 2011-02-08 | Texas Instruments Incorporated | Selective rank CQI and PMI feedback in wireless networks |
| US8130847B2 (en) | 2007-11-09 | 2012-03-06 | Motorola Mobility, Inc. | Closed-loop transmission feedback in wireless communication systems |
| US20090122758A1 (en) | 2007-11-14 | 2009-05-14 | Jack Smith | Method and Apparatus for Transmitting HARQ Sub-Packets in a Wireless Communication System |
| US8447319B2 (en) * | 2007-11-15 | 2013-05-21 | Andrew Llc | System and method for locating UMTS user equipment using measurement reports |
| US8458345B2 (en) | 2008-03-07 | 2013-06-04 | Qualcomm Incorporated | Method and apparatus for frequency reuse in a multi-carrier communications system |
| US8792426B2 (en) | 2008-03-24 | 2014-07-29 | Qualcomm Incorporated | Method and apparatus for resource management in a wireless communication system |
| US8675537B2 (en) | 2008-04-07 | 2014-03-18 | Qualcomm Incorporated | Method and apparatus for using MBSFN subframes to send unicast information |
| WO2009132246A2 (en) * | 2008-04-25 | 2009-10-29 | Interdigital Patent Holdings, Inc. | Multi-cell wtrus configured to perform mobility procedures and methods |
| US8155063B2 (en) | 2008-04-28 | 2012-04-10 | Apple Inc. | Apparatus and methods for transmission and reception of data in multi-antenna systems |
| US20090268680A1 (en) * | 2008-04-28 | 2009-10-29 | Samsung Electronics Co., Ltd. | Signaling formats for indicating unused resource blocks in lte systems |
| US7990314B2 (en) * | 2008-06-30 | 2011-08-02 | Liao Henry H | Method and system for locating a geographical position using broadcast frequency modulation signals |
| JP5045595B2 (ja) | 2008-07-28 | 2012-10-10 | 富士通株式会社 | 回路設計支援装置、回路設計支援プログラム、回路設計支援方法 |
| US8218663B2 (en) | 2008-07-29 | 2012-07-10 | Texas Instruments Incorporated | Reference signal resource allocation for single user MIMO |
| US9294160B2 (en) | 2008-08-11 | 2016-03-22 | Qualcomm Incorporated | Method and apparatus for supporting distributed MIMO in a wireless communication system |
| US8948208B2 (en) | 2008-11-07 | 2015-02-03 | Qualcomm Incorporated | Conveying information through phase offset on PSS relative to DL-RS |
| KR20100053417A (ko) | 2008-11-11 | 2010-05-20 | 엘지전자 주식회사 | 다중입력다중출력 시스템에서 신호 전송 방법 및 신호 수신 방법 |
| WO2010064969A1 (en) | 2008-12-05 | 2010-06-10 | Telefonaktiebolaget L M Ericsson (Publ) | Method and arrangement in a telecommunication system |
| KR101605482B1 (ko) | 2008-12-18 | 2016-03-22 | 닛뽕덴끼 가부시끼가이샤 | 오버랩하는 함께 스케쥴링된 사용자들에 서비스를 제공하는 mu-mimo-ofdma 시스템 및 방법 |
| US8886113B2 (en) | 2008-12-30 | 2014-11-11 | Qualcomm Incorporated | Centralized control of relay operation |
| US8493887B2 (en) | 2008-12-30 | 2013-07-23 | Qualcomm Incorporated | Centralized control of peer discovery pilot transmission |
| US8982851B2 (en) | 2009-01-06 | 2015-03-17 | Qualcomm Incorporated | Hearability improvements for reference signals |
| US20100172310A1 (en) | 2009-01-06 | 2010-07-08 | Fang-Chen Cheng | Method to improve mobile station reception of downlink transmission from a non-serving cell |
| US8982750B2 (en) | 2009-01-16 | 2015-03-17 | Qualcomm Incorporated | Method and apparatus for transmitting overload indicator over the air |
| US7940740B2 (en) | 2009-02-03 | 2011-05-10 | Motorola Mobility, Inc. | Apparatus and method for communicating and processing a positioning reference signal based on identifier associated with a base station |
| KR101644433B1 (ko) | 2009-02-13 | 2016-08-01 | 엘지전자 주식회사 | 4 안테나 시스템에서 상향링크 프리코딩 수행 방법 |
| KR20100099038A (ko) | 2009-03-02 | 2010-09-10 | 엘지전자 주식회사 | 4 안테나 시스템에서 상향링크 프리코딩 수행 방법 |
| JP5340426B2 (ja) * | 2009-03-10 | 2013-11-13 | テレフオンアクチーボラゲット エル エム エリクソン(パブル) | Lte(ロング・ターム・エボリューション)無線通信システムにおけるdl−otoda(ダウンリンク観測到来時間差、downlink observed time difference of arrival)測位の方法及び装置 |
| EP2406996B1 (en) | 2009-03-13 | 2013-12-25 | Telefonaktiebolaget LM Ericsson (publ) | Method and arrangement for positioning in a wireless communications system |
| WO2010110709A1 (en) | 2009-03-27 | 2010-09-30 | Telefonaktiebolaget L M Ericsson (Publ) | Methods and arrangements for enabling estimation of a position of a mobile terminal |
| US8730925B2 (en) | 2009-04-09 | 2014-05-20 | Motorola Mobility Llc | Method and apparatus for generating reference signals for accurate time-difference of arrival estimation |
| US8532072B2 (en) | 2009-04-24 | 2013-09-10 | Digi International Inc. | System and method for adaptively setting the probability of generating a beacon broadcast in a wireless network |
| WO2010126842A1 (en) * | 2009-04-27 | 2010-11-04 | Interdigital Patent Holdings, Inc. | Reference signals for positioning measurements |
| US8964621B2 (en) | 2009-05-08 | 2015-02-24 | Qualcomm Incorporated | Transmission and reception of a reference signal supporting positioning in a wireless communication network |
| WO2010138039A1 (en) * | 2009-05-29 | 2010-12-02 | Telefonaktiebolaget L M Ericsson (Publ) | Signalling measurements for positioning in a wireless network |
| US8965395B2 (en) | 2009-06-05 | 2015-02-24 | Qualcomm Incorporated | Positioning of user equipment in a wireless communication network |
| US9002354B2 (en) * | 2009-06-12 | 2015-04-07 | Google Technology Holdings, LLC | Interference control, SINR optimization and signaling enhancements to improve the performance of OTDOA measurements |
| US8711716B2 (en) | 2009-06-19 | 2014-04-29 | Texas Instruments Incorporated | Multiple CQI feedback for cellular networks |
| US8725182B2 (en) | 2009-06-19 | 2014-05-13 | Htc Corporation | Method of enhancing positioning measurement and related communication device |
| US8483707B2 (en) * | 2009-06-26 | 2013-07-09 | Motorola Mobility Llc | Wireless terminal and method for managing the receipt of position reference singals for use in determining a location |
| US9279879B2 (en) * | 2009-06-26 | 2016-03-08 | Qualcomm Incorporated | Positioning in the presence of passive distributed elements |
| US8891480B2 (en) | 2009-07-01 | 2014-11-18 | Qualcomm Incorporated | Positioning reference signals in a telecommunication system |
| US20110039583A1 (en) * | 2009-08-17 | 2011-02-17 | Motorola, Inc. | Muting time masks to suppress serving cell interference for observed time difference of arrival location |
| US9667378B2 (en) | 2009-10-01 | 2017-05-30 | Telefonaktiebolaget Lm Ericsson (Publ) | Multi-granular feedback reporting and feedback processing for precoding in telecommunications |
| US8374633B2 (en) | 2009-10-05 | 2013-02-12 | Motorola Mobility Llc | Muting indication to enable improved time difference of arrival measurements |
| CN102664848B (zh) * | 2009-10-29 | 2015-08-12 | 中兴通讯股份有限公司 | 数据发送方法及装置 |
| US9277523B2 (en) | 2009-11-05 | 2016-03-01 | Qualcomm Incorporated | Method and apparatus for assisted positioning in a wireless communication system |
| US8233911B2 (en) * | 2009-12-16 | 2012-07-31 | Nokia Corporation | Method and apparatus for estimating a position of a node in a communications network |
| US20110148700A1 (en) | 2009-12-18 | 2011-06-23 | Lasagabaster Javier De Salas | Method and system for mobile device based gnss position computation without ephemeris data |
| US9485069B2 (en) | 2010-04-15 | 2016-11-01 | Qualcomm Incorporated | Transmission and reception of proximity detection signal for peer discovery |
| US8468383B2 (en) * | 2010-12-08 | 2013-06-18 | International Business Machines Corporation | Reduced power failover system |
-
2010
- 2010-06-10 US US12/813,221 patent/US9002354B2/en active Active
- 2010-06-11 MX MX2011013181A patent/MX2011013181A/es active IP Right Grant
- 2010-06-11 RU RU2012100724/07A patent/RU2535191C2/ru active
- 2010-06-11 EP EP12196319.3A patent/EP2574122B1/en active Active
- 2010-06-11 ES ES12196319.3T patent/ES2663199T3/es active Active
- 2010-06-11 WO PCT/US2010/038257 patent/WO2010144765A1/en active Application Filing
- 2010-06-11 BR BRPI1013125-6A patent/BRPI1013125B1/pt active IP Right Grant
- 2010-06-11 EP EP10737679.0A patent/EP2441302B1/en active Active
- 2010-06-11 KR KR1020147003087A patent/KR101592796B1/ko active IP Right Grant
- 2010-06-11 CN CN201510431286.3A patent/CN105101407B/zh active Active
- 2010-06-11 JP JP2012515169A patent/JP5443598B2/ja active Active
- 2010-06-11 EP EP12196328.4A patent/EP2574123B1/en active Active
- 2010-06-11 KR KR1020127000854A patent/KR101548413B1/ko active IP Right Grant
- 2010-06-11 CN CN201080025882.7A patent/CN102461292B/zh active Active
-
2014
- 2014-10-09 RU RU2014140860A patent/RU2670196C2/ru active
-
2015
- 2015-03-30 US US14/673,391 patent/US11159969B2/en active Active
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2007116114A (ru) * | 2004-09-29 | 2008-11-20 | Квэлкомм Инкорпорейтед (US) | Способ, предназначенный для нахождения местоположения подвижного терминала в сотовой радиосистеме |
Non-Patent Citations (1)
| Title |
|---|
| QUALCOMM EUROPE: "On OTDOA in LTE" 3GPP DRAFT; R1-090353, 3RD GENERATION PARTNERSHIP PROJECT (3GPP), MOBILE COMPETENCE CENTRE ; 650, ROUTE DES LUCIOLES ; F-06921 SOPHIA-ANTIPOLIS CEDEX ; FRANCE, no. Ljubljana;, 8 January 2009. * |
Also Published As
| Publication number | Publication date |
|---|---|
| BRPI1013125B1 (pt) | 2021-03-02 |
| KR20120027524A (ko) | 2012-03-21 |
| CN102461292B (zh) | 2015-08-19 |
| EP2574123B1 (en) | 2020-04-15 |
| RU2012100724A (ru) | 2013-07-20 |
| CN105101407A (zh) | 2015-11-25 |
| EP2574123A3 (en) | 2014-03-26 |
| US9002354B2 (en) | 2015-04-07 |
| KR101548413B1 (ko) | 2015-08-28 |
| EP2574122A3 (en) | 2014-04-02 |
| BRPI1013125A2 (pt) | 2016-03-29 |
| EP2441302A1 (en) | 2012-04-18 |
| RU2014140860A (ru) | 2016-04-27 |
| CN102461292A (zh) | 2012-05-16 |
| MX2011013181A (es) | 2012-01-31 |
| WO2010144765A1 (en) | 2010-12-16 |
| EP2574122A2 (en) | 2013-03-27 |
| US20150208271A1 (en) | 2015-07-23 |
| KR20140022482A (ko) | 2014-02-24 |
| JP2012530394A (ja) | 2012-11-29 |
| RU2670196C2 (ru) | 2018-10-19 |
| CN105101407B (zh) | 2018-11-09 |
| KR101592796B1 (ko) | 2016-02-18 |
| ES2663199T3 (es) | 2018-04-11 |
| US11159969B2 (en) | 2021-10-26 |
| EP2574122B1 (en) | 2018-01-03 |
| US20100317343A1 (en) | 2010-12-16 |
| EP2574123A2 (en) | 2013-03-27 |
| EP2441302B1 (en) | 2017-11-15 |
| JP5443598B2 (ja) | 2014-03-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| RU2670196C2 (ru) | Управление помехами, оптимизация sinr и усовершенствования сигнализации, чтобы улучшить производительность измерений otdoa | |
| US10772058B2 (en) | Method and apparatus for reference time acquisition for positioning reference signals in a wireless communication network | |
| CA2982260C (en) | Enhanced positioning reference signal patterns for positioning | |
| KR102085001B1 (ko) | 포지셔닝 레퍼런스 시그널의 전송 | |
| WO2015199392A1 (ko) | 무선 통신 시스템에서 포지셔닝(Positioning)을 수행하기 위한 방법 및 이를 위한 장치 | |
| WO2014112915A1 (en) | Perform positioning measurements taking ul/dl subframe configuration into account | |
| EP3861363A1 (en) | Beam based positioning measurements and measurement reporting | |
| WO2020145877A1 (en) | Wireless device, network node and methods performed therein for time of arrival estimation |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PC43 | Official registration of the transfer of the exclusive right without contract for inventions |
Effective date: 20170302 |
|
| PC41 | Official registration of the transfer of exclusive right |
Effective date: 20170810 |