RU2492498C2 - Способ определения направления на гидроакустический маяк-ответчик по горизонтальному и вертикальному углу - Google Patents
Способ определения направления на гидроакустический маяк-ответчик по горизонтальному и вертикальному углу Download PDFInfo
- Publication number
- RU2492498C2 RU2492498C2 RU2011146852/28A RU2011146852A RU2492498C2 RU 2492498 C2 RU2492498 C2 RU 2492498C2 RU 2011146852/28 A RU2011146852/28 A RU 2011146852/28A RU 2011146852 A RU2011146852 A RU 2011146852A RU 2492498 C2 RU2492498 C2 RU 2492498C2
- Authority
- RU
- Russia
- Prior art keywords
- cos
- plane
- transducers
- coordinate system
- signal
- Prior art date
Links
Images


Landscapes
- Measurement Of Velocity Or Position Using Acoustic Or Ultrasonic Waves (AREA)
Abstract
Изобретение относится к области гидроакустики. Сущность: способ включает излучение судном сигнала запроса и прием пространственной антенной решеткой сигнала ответа от маяка-ответчика, пространственную антенную решетку разбивают на набор плоскостей таким образом, чтобы каждая плоскость образовывалась акустическими центрами трех или четырех преобразователей, лежащих на двух взаимно пересекающихся прямых, с каждой плоскостью связывают свою прямоугольную систему координат и вычисляют горизонтальный и вертикальный углы направления на источник сигнала, для чего преобразователи, акустические центры которых образуют данную плоскость, разбивают на две пары, сигнал оцифровывают с частотой дискретизации Fs, вычисляют взаимную корреляционную функцию сигналов x1 и x2 и для каждой пары преобразователей вычисляют разность моментов времени прихода плоского фронта волны к преобразователям. Затем для каждой плоскости вычисляют горизонтальный A' и вертикальный E' углы направления на источник сигнала в системе координат O'X'Y'Z' соответствующей плоскости. Технический результат: уменьшение вычислительных операций для определения направления на гидроакустический маяк-ответсик, уменьшение количества преобразователей в антенных решетках при применении в качестве ответного сигнала маяка-ответчика сложного навигационного сигнала с фазовой манипуляцией или с линейной частотной модуляцией. 5 ил.
Description
Изобретение относится к области гидроакустики и может быть использовано для определения направления на гидроакустический маяк-ответчик.
Известен способ обнаружения шумящих в море объектов в фиксированном частотном диапазоне, при котором принимают шумовые сигналы в горизонтальной и вертикальной плоскостях многоэлементной антенной решеткой гидролокатора и осуществляют первичную обработку, для чего преобразуют в цифровую форму напряжения шумовых сигналов антенной решетки, выполняют преобразование Фурье отсчетов напряжений шумовых сигналов антенной решетки, вычисляют для каждого из полученных частотных отсчетов амплитудные и фазовые коэффициенты синфазного сложения напряжений сигналов антенной решетки, суммируют выходные напряжения сигналов антенной решетки с постоянными весами, равными произведению амплитудных и фазовых коэффициентов, чем образуют пространственные каналы наблюдения в горизонтальной и вертикальной плоскостях, квадрируют и осуществляют вторичную обработку на каждом цикле обзора, для чего суммируют по всем частотным отсчетам выходные напряжения образованных пространственных каналов в фиксированном частотном диапазоне, усредняют по времени, центрируют и нормируют шумовые сигналы к помехе, осуществляют наблюдение на каждом цикле обзора полученных отметок принятых шумовых сигналов и принимают решение об обнаружении путем сравнения с пороговым значением отношения сигнал-помеха, отличающийся тем, что на каждом цикле обзора до квадрирования для каждого частотного отсчета формируют адаптивные пространственные каналы наблюдения, каждый из которых образован, по крайней мере, тремя смежными пространственными каналами в горизонтальной или в вертикальной плоскости, для чего формируют взаимные спектры мощности между шумовыми сигналами пространственных каналов, участвующих в формировании адаптивного пространственного канала наблюдения, накапливают взаимные спектры мощности шумовых сигналов для заданного времени накопления, составляют матрицу накопленных взаимных спектров мощности шумовых сигналов и осуществляют ортогональное преобразование матрицы, вычисляют векторы фазовых коэффициентов синфазного сложения сигналов пространственных каналов, участвующих в формировании адаптивного пространственного канала наблюдения, вычисляют вектор выходных напряжений пространственных каналов, участвующих в формировании адаптивного пространственного канала путем решения векторно-матричного уравнения для ортогонально преобразованной матрицы накопленных взаимных спектров мощности и вектора фазовых коэффициентов синфазного сложения сигналов, квадрирование производят, вычисляя отклик полученного адаптивного пространственного канала наблюдения, равного обратной величине суммы квадратов элементов вектора выходных напряжений, а вторичную обработку осуществляют для выходных напряжений адаптивных пространственных каналов наблюдения (см. описание изобретения к патенту РФ №2339050, МПК G01S 3/80, G01S 15/04, публикация 20.11.2008).
Недостатком известного способа является невозможность его применения в случае использования ограниченных аппаратных ресурсов.
Известен способ адаптивной пространственной фильтрации сигналов, заключающийся в приеме сигналов в N пространственно разнесенных точках, где N≥2, расчете весовых коэффициентов, взвешенном суммировании принятых сигналов, в котором генерируют первый и второй опорные сигналы с различными частотами, разделяют каждый из них на N равноамплитудных составляющих, сдвигают по фазе каждую составляющую на предварительно заданную величину фазы, после чего i-й принятый сигнал, где i=1, 2, … N, и i-e составляющие первого и второго опорных сигналов суммируют, причем i-й весовой коэффициент рассчитывают по формуле
где Wi(t) - текущее значение i-го весового коэффициента;
Wyi - значение i-го управляющего сигнала;
Δt - интервал временной дискретизации;
Y(t) - взвешенно суммированный сигнал;
Zi(t) - суммарный сигнал от сложения i-го принятого сигнала и i-x составляющих первого и второго опорных сигналов;
* - обозначение операции комплексного сопряжения;
µ - коэффициент усиления (передачи), а частоты первого ω1 и второго ω2 опорных сигналов выбирают из условия ω1<(ω0-Δω), ω2>(ω0+Δω), где ω0 и Δω соответственно несущая частота и ширина спектра принимаемого полезного сигнала (см. описание изобретения к патенту РФ №2141706, МПК H01Q 21/00, публикация 20.11.1999).
К недостаткам указанного выше способа можно отнести использование опорных сигналов с предустановленной несущей частотой, что в условиях наличия доплеровского сдвига частоты в результате взаимного движения источника и приемника сигнала приведет к расстройке контура обработки сигнала.
Известен способ формирования диаграмм направленности N-элементной линейной эквидистантной антенной решетки, заключающийся в том, что сигналы с элементов антенной решетки усиливают, ограничивают в полосе частот и осуществляют преобразование Фурье каждого сигнала, осуществляют инвертирование преобразованного сигнала первого элемента и его попарное суммирование с преобразованными сигналами последующих элементов, для каждого из полученных (N-1) сигналов измеряют спектральную плотность мощности, умножают их на вещественные весовые коэффициенты An, которые определяют из соотношения
An=sin[nπ(N-1)/N]/n,
где n=1, (N-1),
эти сигналы суммируют и суммарный сигнал подвергают частотной фильтрации, амплитудно-частотную характеристику которой выбирают пропорционально функции

где d - расстояние между соседними элементами;
c - скорость распространения волновых процессов в среде;
α - угол между направлением главного лепестка диаграммы направленности и нормалью к плоскости апертуры (см. описание изобретения к авторскому свидетельству СССР №1327026, МПК G01S 3/80, H01Q 3/26, публикация 30.07.1987).
К недостаткам данного метода можно отнести ограниченность его применения только областью линейных эквидистантных антенных решеток, а значит с его помощью можно определить либо только горизонтальный, либо только вертикальный угол направления на источник сигнала.
Известен способ обзора пространства гидроакустической системой, включающий прием акустического сигнала в водной среде с помощью неподвижной гидроакустической антенны, преобразование акустического сигнала в электрические колебания, усиление и частотную фильтрацию этих колебаний, формирование N направлений пространственной фильтрации в пространстве обзора, сдвинутых относительно друг друга на угол 
, где β угол обзора, охватывающий статический веер характеристик направленности антенны, пересекающихся на заданном уровне, а также усреднение во времени сигналов, принимаемых по каждому из направлений пространственной фильтрации, и определение направления на цель, в котором по каждому направлению пространственной фильтрации электрические колебания после их усиления и частотной фильтрации преобразуют в энергетические спектры, которые сопоставляют попарно по соседним направлениям пространственной фильтрации, и определяют направление qx на удаленный источник сигнала из уравнения

где G1(f), G2(f) энергетические спектры, соответствующие соседним направлениям пространственной фильтрации;
R(Θx) любая из характеристик направленности статического веера, причем Θx определяют для каждой из частот спектрального анализа в рабочем диапазоне,
после чего усредняют по ансамблю полученные данные, при этом после сопоставления энергетических спектров G1(f) и G2(f) подавляют сигналы в направлениях с меньшими значениями энергетических спектров на всех частотах (см. описание изобретения к патенту РФ №2047278, МПК G01S 7/52, H04R 1/44, публикация 27.10.1995).
К недостаткам данного способа можно отнести необходимость построения веера характеристик направленности антенной решетки, что приводит к большим вычислительным затратам, а значит невозможности его реализации в условиях использования ограниченных вычислительных ресурсов.
Известен способ подледного приема сигналов спутниковых навигационных систем при нахождении подводного объекта на горизонте плавания с использованием гидроакустического канала передачи навигационной информации, включающий ввод в лед антенны приемника спутниковой навигационной системы в месте приледнения данной антенны к нижней кромке льда, прием этой антенной сигналов космических аппаратов, измерение приемником параметров этих сигналов и по полученным данным определение вычислительным путем искомых поправок к геодезическим счислимым координатам и курсу, вырабатываемых бортовой инерциальной навигационной системой подводного объекта, осуществление путем учета данных поправок коррекции бортовой инерциальной навигационной системы, в котором доставляют от горизонта плавания подводного объекта до места приледнения к нижней кромки льда антенну с приемником сигналов спутниковой навигационной системы и с механизмом внедрения ее в лед, двухканальный маяк-ответчик, который имеет разные коды запроса и разную частоту излучаемого гидроакустического сигнала, измеритель скорости распространения звука в воде и гидростатический датчик, внедряют антенну с приемником сигналов спутниковой навигационной системы в лед в месте ее приледнения к нижней кромке льда с помощью механизма внедрения до момента выхода данной антенны изо льда в воздушную среду, а на подводном объекте используют двухканальную гидроакустическую систему с двумя гидроакустическими приемоизлучающими антеннами, одну приемоизлучающую гидроакустическую антенну устанавливают в заданном месте в корме, а другую гидроакустическую приемоизлучающую антенну устанавливают в заданном месте в носу подводного объекта, при этом две данные антенны располагают вдоль направления его диаметральной плоскости или под известным углом к ней, определяют геодезические координаты маяка-ответчика приемником сигналов спутниковой навигационной системы, в период подъема до нижней кромки льда антенны с приемником сигналов спутниковой навигационной системы и их погружения до подводного объекта измеряют гидростатическое давление воды гидростатическим датчиком, а также скорость звука в воде измерителем скорости звука, а на подводном объекте синхронно излучают в направлении маяка-ответчика сигналы «запроса» одной и второй гидроакустическими приемоизлучающими антеннами и принимают переизлученные сигналы маяка-ответчика данными антеннами, по измеренным параметрам которых определяют вычислительным путем наклонные расстояния от подводного объекта до маяка-ответчика и пеленги на маяк-ответчик из двух заданных мест установки данных двух гидроакустических приемоизлучающих антенн двухканальной навигационной гидроакустической системы (см. описание изобретения к патенту РФ №2398316, МПК H01Q 1/04, публикация 27.08.2009).
К недостаткам данного изобретения можно отнести применение двух гидроакустических приемоизлучающих антенн, которые необходимо установить в носу и корме судна носителя (так называемая система с длинной базой), что не всегда возможно.
Задачей заявляемого изобретения является уменьшение вычислительных затрат на выполнение процедуры определения направления на гидроакустический маяк-ответчик при обработке сигналов, принятых преобразователями антенной решетки. Уменьшение вычислительных затрат достигается тем, что в предлагаемом способе отсутствует процедура вычисления пространственного спектра или веера диаграмм направленности антенной решетки для всех возможных направлений прихода сигнала от маяка-ответчика. Вместо этого на основе относительных задержек прихода фронта волны сигнала, измеренных для пар преобразователей, аналитическим способом вычисляется направление прихода сигнала от маяка-ответчика. Данный метод эффективен для антенных решеток с небольшим количеством преобразователей при применении в качестве ответного сигнала маяка-ответчика сложного навигационного сигнала с фазовой манипуляцией по закону м-последовательности или с линейной частотной модуляцией.
Сущность заявляемого изобретения заключается в следующем.
Способ определения направления на гидроакустический маяк-ответчик по горизонтальному и вертикальному углу, включающий излучение судном сигнала запроса и прием пространственной антенной решеткой сигнала ответа от маяка-ответчика, пространственную антенную решетку разбивают на набор плоскостей таким образом, чтобы каждая плоскость образовывалась акустическими центрами трех или четырех преобразователей, лежащих на двух взаимно пересекающихся прямых, с каждой плоскостью связывают свою прямоугольную систему координат и вычисляют горизонтальный и вертикальный углы направления на источник сигнала, для чего преобразователи, акустические центры которых образуют данную плоскость, разбивают на две пары, сигнал оцифровывают с частотой дискретизации Fs, вычисляют взаимную корреляционную функцию сигналов x1 и x2, принятых преобразователями каждой пары по формуле:

где k - аргумент взаимной корреляционной функции соответствующий сдвигу в отсчетах двух сигналов x1 и x2, изменяющийся в диапазоне - kmax≤k≤kmax;
- количество отсчетов максимально возможной с задержки сигнала на преобразователях одной пары;
N - количество отсчетов анализируемого фрагмента сигнала;
и для каждой пары преобразователей вычисляют разность моментов времени прихода плоского фронта волны к преобразователям:
где 
- позиция максимума взаимной корреляционной функции в отсчетах,
затем для каждой плоскости по найденным относительным задержкам для двух пар преобразователей и известным координатам акустических центров преобразователей вычисляют горизонтальный A′ и вертикальный E′ углы направления на источник сигнала в системе координат O′X′Y′Z′ соответствующей плоскости:



где X1=x1-x3 - разность абсцисс акустических центров преобразователей 1 и 3, образующих плоскость;
X2=x2-x4 - разность абсцисс акустических центров преобразователей 2 и 4;
H1=h1-h3, где h1 и h3 - расстояние, проходимое плоским фронтом волны от преобразователей 1 и 3 до начала системы координат, связанной с рассматриваемой плоскостью;
H2=h2-h3, где h2 и h3 - расстояния, проходимые плоским фронтом волны от преобразователей 2 и 3 до начала системы координат, связанной с рассматриваемой плоскостью;
затем для каждого направления, задаваемого значениями горизонтального и вертикального углов, вычисляют единичный вектор в прямоугольной системе координат, связанной с каждой из плоскостей:
где 
и 
- единичные векторы для плоскости m, направлений на маяк-ответчик (A, E1) и (A, E2) в системах координат плоскостей преобразователей 
и выполняют перевод прямоугольных координат найденных векторов в систему координат, связанную с антенной решеткой, по формуле:
где cosO′X′ - направляющий косинус оси O'X' в системе координат OXYZ;
cosO′Y′ - направляющий косинус оси O'Y' в системе координат OXYZ;
cosO′Z′ - направляющий косинус оси O'Z' в системе координат OXYZ;
после вычисления векторов 
и 
для всех m плоскостей находят истинный вектор направления 
на источник сигнала путем усреднения тех векторов, расстояния между которыми, вычисленные по Евклидовой норме, минимальны, затем координаты найденного таким образом вектора, переводят в сферическую систему координат, связанную с антенной решеткой, с помощью формул:

где 
, 
, 
- прямоугольные координаты усредненного вектора направления на источник сигнала;
это позволяет определить значения горизонтального A и вертикального E углов, задающих направление на гидроакустический маяк-ответчик.
Сущность заявляемого изобретения поясняется чертежами: где на фиг.1 показана антенная решетка со своей системой координат OXYZ и фронт волны акустического сигнала маяка-ответчика:
S1÷S7, Si - акустические центры преобразователей; α0 - плоскость фронта волны принимаемого антенной сигнала в момент времени t=0, αi - в момент времени t=ti, когда фронт достигает преобразователя Si; ν - нормаль к плоскости фронта волны, ri - радиус-вектор преобразователя Si, hi - расстояние между фронтами волны в момент времени t=ti и t=0; A и E - горизонтальный и вертикальный углы направления на источник сигнала - гидроакустический маяк-ответчик;
на фиг.2 показано разбиение антенной решетки на плоскости:
S1÷S7 - акустические центры преобразователей; ν - нормаль к плоскости фронта волны - вектор, задающий направление прихода сигнала; A и E - горизонтальный и вертикальный углы направления на источник сигнала - гидроакустический маяк-ответчик; OXYZ - система координат антенной решетки, O'X'Y'Z' - система координат, связанная с плоскостью преобразователей S2S3S7.;
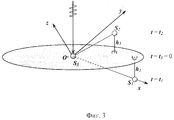
на фиг.3 показана плоскость со связанной системой координат O'X'Y'Z', образованная тремя преобразователями S1, S2, S3, и ее расположение относительно фронта волны в момент времени t=0; t1 и t2 - моменты времени, когда фронт волны достигает преобразователи S1 и S2 соответственно, h1 и h2 - расстояния, измеренные относительно нулевого положения, проходимые фронтом волны при достижении преобразователей S1 и S2 соответственно;
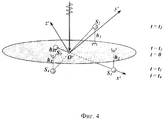
на фиг.4 показана плоскость со связанной системой координат O'X'Y'Z', образованная двумя парами преобразователей S1, S3 и S2, S4, и расположение ее относительно фронта волны в момент времени t=0; t1, t2, t3, t4 - моменты времени, когда фронт волны достигают преобразователи S1, S2, S3 и S4 соответственно; h1, h2, h3, h4 - расстояния, измеренные относительно нулевого положения, проходимые фронтом волны при достижении преобразователей S1, S2, S3 и S4 соответственно;
на фиг.5 показаны координаты 
, 
, 
, 
преобразователей S1, S2, S3 и S4 в системе координат O′X′Y′, связанной с плоскостью преобразователей.
Заявляемый способ осуществляют следующим образом.
С пространственной антенной решеткой связывают трехмерную прямоугольную систему координат OXYZ, ось OZ которой направлена вниз для удобства, так как вертикальный угол под водой отсчитывают от плоскости OXY вниз. Радиус-вектор произвольного преобразователя Si в системе координат OXYZ обозначим как ri=[xi yi zi]T. Расположение преобразователей и системы координат показано на фиг.1.
В описываемом способе делают следующие допущения: каждый преобразователь считают точкой, координаты которой совпадают с акустическим центром преобразователя; ввиду относительной удаленности источника сигнала от антенны, по сравнению с расстояниями между преобразователями, фронт волны, приходящий к каждому преобразователю, считают плоским.
Направление на источник сигнала задают горизонтальным и вертикальным углами - вектором [A, E] в сферической системе координат с началом координат в точке O. Горизонтальный угол A - угол между осью OX и проекцией вектора направления на плоскость OXY, отсчитывают от оси OX по часовой стрелке, если смотреть на плоскость OXY сверху. Вертикальный угол E - угол между вектором направления на источник и его проекцией на плоскость OXY и отсчитывают от плоскости OXY вниз (см. фиг.1).
Плоскости фронта волны α0 и αi, схематически показаны на фиг.1 эллипсами. Направление на источник сигнала есть нормаль к плоскости фронта волны - вектор ν на фиг.1. Благодаря пространственной удаленности преобразователей, фронт волны сигнала от источника излучения достигнет преобразователей в разные моменты времени. Для расчетов необходимы только относительные времена прихода сигнала к преобразователям, поэтому для удобства расчетов за t=0 принимают момент времени, когда плоский фронт волны достигнет точки O - начала системы координат антенной решетки. Фронт волны достигает i-й преобразователь в момент времени t=ti, причем, если преобразователь находится ближе к источнику чем т.O, то знак у ti будет отрицательный, а если дальше - положительный.
Пространственная антенная решетка разбивают на набор плоскостей. Пример объединения преобразователей антенной решетки в плоскости представлен на фиг.2. Каждая плоскость образуют акустическими центрами трех или четырех преобразователей антенной решетки. В случае образования плоскости четырьмя преобразователями их акустические центры должны лежать на двух взаимно пересекающихся прямых. Выбор разбиения антенной решетки на плоскости должен производиться так, чтобы плоскости, образованные акустическими центрами преобразователей, не совпадали друг с другом.
С каждой плоскостью связывают свою прямоугольную систему координат (на фиг.2 показана система координат O'X'Y'Z', связанная с плоскостью преобразователей S2S3S7) и вычисляют горизонтальный и вертикальный углы направления на источник сигнала в системе координат соответствующей плоскости преобразователей. Для этого преобразователи, акустические центры которых образуют данную плоскость, разбивают на две пары. В случае трех преобразователей один из преобразователей будет общим для обоих пар. Для каждой пары преобразователей вычисляют разность моментов времени прихода фронта волны к преобразователям - относительная задержка. Для этого сигнал оцифровывают с частотой дискретизации Fs, вычисляют взаимную корреляционную функцию сигналов x1 и x2, принятых преобразователями каждой пары по формуле:
где k - аргумент взаимной корреляционной функции соответствующий сдвигу в отсчетах двух сигналов x1 и x2, изменяющийся в диапазоне - kmax≤k≤kmax;
- количество отсчетов максимально возможной с задержки сигнала на преобразователях одной пары;
N - количество отсчетов анализируемого фрагмента сигнала;
и для каждой пары преобразователей вычисляют разность моментов времени прихода плоского фронта волны к преобразователям:
где
- позиция максимума взаимной корреляционной функции в отсчетах,
Для каждой плоскости по найденным относительным задержкам для двух пар преобразователей и известным координатам акустических центров преобразователей вычисляют горизонтальный A' и вертикальный E' углы направления на источник сигнала в системе координат O'X'Y'Z', связанной с данной плоскостью преобразователей.
Для этого зададим плоскость фронта волны ее нормалью ν' (см. фиг.1). В сферической системе координат вектор ν определяют тройкой чисел (|ν|, A', E'), где |ν|, - длина вектора. С учетом того, что вектор ν′ направлен от плоскости αi (см. фиг.1) к точке O' (в соответствии с направлением прихода сигнала), его прямоугольные координаты определяют следующим образом:
Что можно записать в векторной форме:

Так как нас интересует лишь направление вектора, то примем |ν|=1.
Тогда

Рассмотрим фронт волны в двух положениях: в момент времени t=0, когда он находится в начале координат, и в момент времени t=ti, когда он проходит преобразователь Si (см. фиг.1). Обозначим расстояние между фронтами в эти моменты времени как hi, которое определяют как скалярное произведение нормали к плоскости ν' и радиус-вектора ri преобразователя Si.
hi=ν'(A', E')·ri=-(xicos(E')cos(A')+yicos(E')sin(A')+zisin(E'))
Сначала рассмотрим случай, когда две базы образованы тремя преобразователями S1, S2, S3, т.е. один преобразователь общий, пусть это будет S3. Свяжем с этими преобразователями систему координат O'X'Y'Z' таким образом, чтобы точка O' совпадала с S3, ось О'Х' совпадала с вектором S3S1, а база S3S2 произвольно лежала в плоскости O'X'Y'Z'. Схему такого расположения преобразователей см. на фиг.3.
При анализе сигналов, приходящих на преобразователи возможно измерение только относительных задержек прихода сигнала на соответствующих преобразователях, в данном случае это S3S1 и S3S2. Зная скорость распространения волн, можно вычислить путь, который проходит фронт волны между преобразователями, соответственно Δh13 и Δh23.
Составим систему уравнений для трех преобразователей:
x1cos(E')cos(A')+y1cos(E')sin(A')+z1sin(E')=-h1
x2cos(E')cos(A')+y2cos(E')sin(A')+z2sin(E')=-h2
x3cos(E')cos(A')+y3cos(E')sin(A')+z3sin(E')=-h3
Δh13=h1-h3
Δh23=h2-h3
Так как за точку, в которой t=0, принято начало координат, в котором находится преобразователь S3, то h3=0, x3=y3=z3=0. Координата по оси O'Z' у всех преобразователей равна 0, у S1 также равна нулю координата по оси O'Y'.
Учитывая все вышеизложенные условия, систему упрощают до следующего вида:
x1cos(E')cos(A')=-Δh13
x2cos(E')cos(A')+y2cos(E')sin(A')=-Δh23
Для простоты обозначим Δh31=H1, Δh32=H2 и окончательно получим:
x1cos(E')cos(A')=-H1
x2cos(E')cos(A')+y2cos(E')sin(A')=-H2
Рассмотрим теперь случай, когда плоскость образована пересечением прямых, соответствующих двум базам преобразователей S4S2 и S3S1 (см. фиг.4). Свяжем с преобразователями систему координат O'X'Y'Z' таким образом, чтобы точка O' лежала на пересечении прямых S4S2 и S3S1, ось О'Х' совпадала с вектором S3S1, а база S4S2 произвольно лежала в плоскости O'X'Y'Z' (см. фиг.4). По относительным задержкам сигналов можно найти Δh13 и Δh24.
Составим систему уравнений для данного случая:
x1cos(E')cos(A')+y1cos(E')sin(A')+z1sin(E')=-h1
x2cos(E')cos(A')+y2cos(E')sin(A')+z2sin(E')=-h2
x3cos(E')cos(A')+y3cos(E')sin(A')+z3sin(E')=-h3
x4cos(E')cos(A')+y4cos(E')sin(A')+z4sin(E')=-h4
Δh13=h1-h3
Δh24=h2-h4
Учитывая, что координата по оси O'Z' у всех преобразователей равна 0, у S1 и S3 также равны нулю координаты по оси O'Y', упрощаем систему:
x1cos(E')cos(A')=-h1
x2cos(E')cos(A')+y2cos(E')sin(A')=-h2
x3cos(E′)cos(A′)=-h3
x4cos(E′)cos(A′)+y4cos(E′)sin(A′)=-h4
Δh13=h1-h3
Δh24=h2-h4
Вычитая третье уравнение из первого, а четвертое из второго, и подставляя в них Δh13, Δh24, получаем:
(x1-x3)cos(E′)cos(A′)=-Δh13
(x2-x4)cos(E′)cos(A′)+(y2-y4)cos(E′)sin(A′)=-Δh24
Произведем замену: x1-x3=X1, x2-x4=X2, Δh31=H1, Δh32=H2, в результате которой получим окончательно:
x1cos(E′)cos(A′)=-H1
x2cos(E′)cos(A′)+Y2cos(E′)sin(A′)=-H2
Получено тоже самое уравнение, что и для случая баз, образованных тремя преобразователями. Итак, в обоих случаях задачу решают аналогично.
Полученная система тригонометрических уравнений дает два решения относительно A' и E':
Поскольку для каждой из плоскостей получают два направления на источник сигнала в системе координат связанной с конкретной плоскостью, выполняют перевод найденных величин в систему координат, связанную с антенной решеткой и разрешение неоднозначности следующим способом. Для каждого направления, задаваемого значениями горизонтального и вертикального углов, вычисляют единичный вектор в прямоугольной системе координат, связанной с антенной решеткой.
Для того чтобы по направлению, полученному в системе координат плоскости преобразователей, определить вектор направления в системе координат антенны, необходимо выполнить поворот вектора направления в соответствии с направляющими косинусами осей системы координат O'X'Y'Z' в системе OXYZ. Вектор направления на источник получим по горизонтальному A' и вертикальному E' углам по формуле:
Направляющие косинусы системы координат O'X'Y'Z' получим, исходя из вышеперечисленных условий привязки этой системы координат к двум парам преобразователей. Рассмотрим теперь сразу случай четырех преобразователей в одной плоскости, так как случай трех преобразователей аналогичен. Система координат и преобразователи изображены на фиг.5. Для начала нам необходимо определить точку пересечения прямых, образованных базами преобразователей. Это можно сделать, решив систему уравнений для прямых S4S2 и S3S1 (см. фиг.5):

Таким образом, получаем координаты (xo, yo, zo) точки O' - начало координат для координатной системы O'X'Y'Z'.
Далее по двум точкам из множества S4S2S3S1 и точке O' нужно определить направляющие косинусы осей координат системы координат O'X'Y'Z'. Мы условились, что одна из прямых, соединяющих преобразователи, будет осью O'X'. Пусть ось O'X' проходит через точку S1, как и в предыдущих случаях.
Определим длины сторон треугольника O'S1S2:
Вектор направляющих косинусов оси О′X′ определяют просто:

Определим направляющие косинусы оси O'Y':

Для этого необходимо определить координаты точки R в системе координат OXYZ. Точка R является проекцией S2 на ось O'Y'.
Прямая RS2 параллельна оси O'X', а значит, их направляющие косинусы совпадают.
Вектор направляющих косинусов прямой RS2 вычисляют как:
Поскольку прямая ОХ параллельна RS2, то cosOX=cosRS2, соответственно:
(S2-R)/|RS2|=cosO′X′.
Откуда получаем координатный вектор точки R:
R=S2-|RS2|=cosO′X′.
Отрезок |O'R| определяем из прямоугольного треугольника O′PS2:
Отрезок |O'P| можно определить следующим образом:
|O'P|=|O′S2|cos(α).
По теореме косинусов:
Подставляя данное выражение в предыдущее, получаем:

Упрощая, получаем:

Подставляя полученное выражение для |O'P| в выражение для вычисления значения |O′R|, окончательно получаем длину отрезка O'R:

Итак, зная значение координат точки R и длину отрезка O'R, получим направляющие косинусы оси O'Y'.
Направляющие косинусы оси O'Z' определяют, исходя из того, что эта ось перпендикулярна к плоскости O'X'Y', а значит, ее направляющие косинусы равны направляющим косинусам нормали к этой плоскости.
Зная уравнение плоскости:
A·x+B·y+C·z+D=0,
направляющие косинусы нормали вычисляют следующим образом:
В нашем случае, проще задать уравнение плоскости по 3-м точкам:
O'(x0, y0, z0), S1(x1, y1, z1), S2(x2, y2, z2), тогда A, B, C задают следующими определителями:

Зная направляющие косинусы всех осей системы координат O'X'Y'Z', можно определить матрицу вращения T для перехода из координатной системы O'X'Y'Z' в OXYZ.
Теперь, используя данную матрицу вращения, мы можем перевести вектор направления на источник сигнала ν' из координатной системы O'X'Y'Z' в OXYZ следующим образом (в матричном виде):
ν(A, E)=TT·ν(A, E)'.
После вычисления векторов
и
для всех m плоскостей антенной решетки находят истинный вектор направления 
на источник сигнала путем усреднения тех векторов, расстояния между которыми, вычисленные по Евклидовой норме, минимальны, чем решают неоднозначность определения направления для каждой из плоскостей.
Затем координаты найденного таким образом вектора, переводят в сферическую систему координат, связанную с антенной решеткой, с помощью формул:
где 
, 
, 
- прямоугольные координаты усредненного вектора направления на источник сигнала,
в результате чего получают значения горизонтального A и вертикального E углов, задающих направление на гидроакустический маяк-ответчик.
Заявляемый способ позволяет уменьшить вычислительные затраты на выполнение процедуры определения направления на гидроакустический маяк-ответчик при обработке сигналов, принятых преобразователями антенной решетки.
Claims (1)
- Способ определения направления на гидроакустический маяк-ответчик по горизонтальному и вертикальному углу, включающий излучение судном сигнала запроса и прием пространственной антенной решеткой сигнала ответа от маяка-ответчика, отличающийся тем, что пространственную антенную решетку разбивают на набор плоскостей таким образом, чтобы каждая плоскость образовывалась акустическими центрами трех или четырех преобразователей, лежащих на двух взаимно пересекающихся прямых, с каждой плоскостью связывают свою прямоугольную систему координат и вычисляют горизонтальный и вертикальный углы направления на источник сигнала, для чего преобразователи, акустические центры которых образуют данную плоскость, разбивают на две пары, сигнал оцифровывают с частотой дискретизации Fs, вычисляют взаимную корреляционную функцию сигналов x1 и x2, принятых преобразователями каждой пары по формуле:

где k - аргумент взаимной корреляционной функции, соответствующий сдвигу в отсчетах двух сигналов x1 и x2, изменяющийся в диапазоне - kmax≤k≤kmax;

N - количество отсчетов анализируемого фрагмента сигнала;
и для каждой пары преобразователей вычисляют разность моментов времени прихода плоского фронта волны к преобразователям:

где
затем для каждой плоскости по найденным относительным задержкам для двух пар преобразователей и известным координатам акустических центров преобразователей вычисляют горизонтальный A' и вертикальный E' углы направления на источник сигнала в системе координат O'X'Y'Z' соответствующей плоскости:
где X1=x1-x3 - разность абсцисс акустических центров преобразователей 1 и 3, образующих плоскость;
Х2=x2-x4 - разность абсцисс акустических центров преобразователей 2 и 4;
H1=h1-h3, где h1 и h3 - расстояние, проходимое плоским фронтом волны от преобразователей 1 и 3 до начала системы координат, связанной с рассматриваемой плоскостью;
H2=h2-h3, где h2 и h3 - расстояния, проходимые плоским фронтом волны от преобразователей 2 и 3 до начала системы координат, связанной с рассматриваемой плоскостью;
затем для каждого направления, задаваемого значениями горизонтального и вертикального углов, вычисляют единичный вектор в прямоугольной системе координат, связанной с каждой из плоскостей:
где
и выполняют перевод прямоугольных координат найденных векторов в систему координат, связанную с антенной решеткой, по формуле:
где cosO'X' - направляющий косинус оси O'X' в системе координат OXYZ;
cosO'Y' - направляющий косинус оси O'Y' в системе координат OXYZ;
cosO'Z' - направляющий косинус оси O'Z' в системе координат OXYZ;
после вычисления векторов

где
в результате чего получают значения горизонтального A и вертикального E углов, задающих направление на гидроакустический маяк-ответчик.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| RU2011146852/28A RU2492498C2 (ru) | 2011-11-17 | 2011-11-17 | Способ определения направления на гидроакустический маяк-ответчик по горизонтальному и вертикальному углу |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| RU2011146852/28A RU2492498C2 (ru) | 2011-11-17 | 2011-11-17 | Способ определения направления на гидроакустический маяк-ответчик по горизонтальному и вертикальному углу |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| RU2011146852A RU2011146852A (ru) | 2013-05-27 |
| RU2492498C2 true RU2492498C2 (ru) | 2013-09-10 |
Family
ID=48789033
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2011146852/28A RU2492498C2 (ru) | 2011-11-17 | 2011-11-17 | Способ определения направления на гидроакустический маяк-ответчик по горизонтальному и вертикальному углу |
Country Status (1)
| Country | Link |
|---|---|
| RU (1) | RU2492498C2 (ru) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2826224C1 (ru) * | 2023-11-24 | 2024-09-06 | Иван Иванович Павлов | Подводный беспроводной акустический приемопередатчик |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN118534447B (zh) * | 2024-07-22 | 2024-10-11 | 蓝海星网装备科技(青岛)有限公司 | 基于超短基线十阵元声基阵及其定位方法 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4229809A (en) * | 1979-01-29 | 1980-10-21 | Sperry Corporation | Acoustic under sea position measurement system |
| US4758997A (en) * | 1986-08-25 | 1988-07-19 | Hydroacoustics Inc. | Method and apparatus for the generation and transmission of signals for echo location and other signaling purposes, particularly in geophysical exploration |
| RU2285273C1 (ru) * | 2005-04-18 | 2006-10-10 | Государственное образовательное учреждение высшего профессионального образования Военно-морская академия им. Адмирала Флота Советского Союза Н.Г. Кузнецова | Способ использования навигационной гидроакустической системы подводными аппаратами с определением места по разностям расстояний до ведущего подводного аппарата и маяков-ответчиков |
| RU2292057C1 (ru) * | 2005-06-07 | 2007-01-20 | Государственное образовательное учреждение высшего профессионального образования Военно-морская академия им. Адмирала Флота Н.Г. Кузнецова | Способ использования навигационной гидроакустической системы подводными аппаратами с определением места по разностям расстояний до маяков-ответчиков |
| RU2010103076A (ru) * | 2010-01-29 | 2011-08-10 | Сергей Борисович Курсин (RU) | Способ определения координат посредством гидроакустической навигационной системы |
-
2011
- 2011-11-17 RU RU2011146852/28A patent/RU2492498C2/ru not_active IP Right Cessation
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4229809A (en) * | 1979-01-29 | 1980-10-21 | Sperry Corporation | Acoustic under sea position measurement system |
| US4758997A (en) * | 1986-08-25 | 1988-07-19 | Hydroacoustics Inc. | Method and apparatus for the generation and transmission of signals for echo location and other signaling purposes, particularly in geophysical exploration |
| RU2285273C1 (ru) * | 2005-04-18 | 2006-10-10 | Государственное образовательное учреждение высшего профессионального образования Военно-морская академия им. Адмирала Флота Советского Союза Н.Г. Кузнецова | Способ использования навигационной гидроакустической системы подводными аппаратами с определением места по разностям расстояний до ведущего подводного аппарата и маяков-ответчиков |
| RU2292057C1 (ru) * | 2005-06-07 | 2007-01-20 | Государственное образовательное учреждение высшего профессионального образования Военно-морская академия им. Адмирала Флота Н.Г. Кузнецова | Способ использования навигационной гидроакустической системы подводными аппаратами с определением места по разностям расстояний до маяков-ответчиков |
| RU2010103076A (ru) * | 2010-01-29 | 2011-08-10 | Сергей Борисович Курсин (RU) | Способ определения координат посредством гидроакустической навигационной системы |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2826224C1 (ru) * | 2023-11-24 | 2024-09-06 | Иван Иванович Павлов | Подводный беспроводной акустический приемопередатчик |
Also Published As
| Publication number | Publication date |
|---|---|
| RU2011146852A (ru) | 2013-05-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8107320B2 (en) | Autonomous sonar system and method | |
| RU2515179C1 (ru) | Способ определения направления на гидроакустический маяк-ответчик в условиях многолучевого распространения навигационного сигнала | |
| US20120098703A1 (en) | Method for Determining Azimuth and Elevation Angles of Arrival of Coherent Sources | |
| US5615175A (en) | Passive direction finding device | |
| RU2624449C1 (ru) | Способ поляризационного пеленгования радиосигналов | |
| US11953580B2 (en) | Over the horizon radar (OTH) system and method | |
| CN101581785A (zh) | 用于小型水下载体的三维前视声像声纳系统和方法 | |
| JP2020193881A (ja) | 方位推定装置、方位推定方法、及びプログラム | |
| RU2557808C1 (ru) | Способ определения наклонной дальности до движущейся цели пассивным моностатическим пеленгатором | |
| EP2317335B1 (en) | Improved beamforming method for analysing signals received by a transducer arrray, and relative detection system | |
| Boiko et al. | Design concepts for mobile computing direction finding systems | |
| RU2613369C1 (ru) | Способ навигации летательного аппарата с использованием высокоточного одноэтапного пеленгатора и адресно-ответной пакетной цифровой радиолинии в дкмв диапазоне | |
| RU2711341C1 (ru) | Способ двухмерного пеленгования | |
| Dzikowicz et al. | Demonstration of spiral wave front sonar for active localization | |
| RU2492498C2 (ru) | Способ определения направления на гидроакустический маяк-ответчик по горизонтальному и вертикальному углу | |
| JP3484995B2 (ja) | 瞬時パッシブ距離測定装置 | |
| US20020126043A1 (en) | Method and apparatus for locating a terrestrial transmitter from a satellite | |
| RU2653956C1 (ru) | Способ определения текущих координат цели в бистатическом режиме гидролокации | |
| US20060083110A1 (en) | Ambient bistatic echo ranging system and method | |
| JP7413850B2 (ja) | 物体位置の角度推定装置及び方法、並びにレーダ装置 | |
| RU2614035C1 (ru) | Одноэтапный метод пеленгования источников излучения в дкмв диапазоне с применением фазированной антенной решетки, состоящей из взаимно ортогональных симметричных горизонтальных вибраторов | |
| US7362655B1 (en) | Time-synchronous acoustic signal ranging system and method | |
| RU2405166C2 (ru) | Способ определения местоположения передатчика переносным пеленгатором | |
| RU2195683C2 (ru) | Способ определения направления на цель | |
| CN116736283A (zh) | 一种广域超稀疏mimo雷达系统近场角度测量方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| MM4A | The patent is invalid due to non-payment of fees |
Effective date: 20141118 |